introducción a las ecuaciones diferenciales
DESCRIPTION
Introducción A Las Ecuaciones DiferencialesUNIVERSIDAD DISTRITALRodrigo Rincon Zarta Jorge Adelmo HernándezTRANSCRIPT
INTRODUCCION A LAS
ECUACIONES
DIFERENCIALES
Jorge Adelmo Hernandez Pardo*
Especialista en Matematica Avanzada
Universidad Nacional de Colombia
Profesor Asistente de la Universidad Distrital
“Francisco Jose de Caldas”
Rodrigo Rincon Zarta**
Especialista en Matematica Avanzada
Universidad Nacional de Colombia
Profesor Asistente de la Universidad Distrital
“Francisco Jose de Caldas”
Noviembre de 2007
*email [email protected].**email [email protected]

2
Prefacio
El texto recopila la experiencia docente acumulada por cada uno de los
autores durante mas de dos anos orientando la catedra “Introduccion a las
Ecuaciones Diferenciales”. Sabemos que responde a las necesidades academi-
cas de las facultades tecnologicas y facultades de ingenierıa.
El pronto desarrollo de “La Transformada de Laplace ”, se hace con el ani-
mo de que muchas de las ecuaciones diferenciales con condiciones iniciales
se puedan solucionar utilizando la transformada enunciada.
El texto contiene el desarrollo teorico basico para un curso de ecuaciones
diferenciales clasico y puede ser, si ası se requiere, complementado por al-
gunos de los textos de la bibliografıa resenada al final de este libro.
Por otra parte, los elevados costos de los textos tradicionales impiden que
muchos de nuestros estudiantes tenga la posibilidad de adquirir uno de di-
chos ejemplares. Este libro pretende, entre otros, subsanar esta situacion.
El libro tiene tres capıtulos, el primero de estos hace un tratamiento de-
tallado de las integrales impropias (sin demostraciones), para aquellos es-
tudiantes que no tengan conocimientos frescos de estos temas y por tanto
podrıan ser tomados unicamente como material de consulta. Dicho capıtulo
esta hecho mas o menos a la manera del libro [1].
En el segundo capıtulo, titulado “Transformada de Laplace”, se hace un
desarrollo mas o menos profundo de la transformada de Laplace para fun-
i
ii CAPITULO 0. PREFACIO
ciones causales, y que de acuerdo con el orden establecido por el libro, es una
aplicacion inmediata de las integrales impropias de primera clase. Ademas,
se desarrollan algunas aplicaciones en la solucion de ecuaciones diferenciales,
ecuaciones integrales y ecuaciones integro-diferenciales.
El tercer capıtulo contiene un estudio rapido de las ecuaciones diferenciales
ordinarias de primer orden y orden superior con aplicaciones, el desarrollo
es clasico a la manera de [2].
Ademas contiene una pequena pero util introduccion a las sucesiones y series
y tambien una tabla de transformadas de Laplace.
Este libro es el resultado de dos ediciones de Notas de Clase publicadas
por el Fondo de Publicaciones Universidad Distrital entre los anos 2004 y
2006 con un tiraje de 300 ejemplares por cada edicion. La excelente acogida
nos motivo a complementar el contenido y proponerle a las directivas de
la Universidad Distrital la publicacion como libro de texto. Despues de ser
evaluado positivamente por pares externos fue aprobada por el comite de
publicaciones y de esta forma se hace realidad nuestra pretension.
Los autores agradecemos las sugerencias y observaciones que nos hicieron
tanto colegas como estudiantes sobre las Notas de Clase y tambien agrade-
cemos cualquier sugerencia que los lectores hagan a este texto y las tendran
en cuenta para mejorar una futura edicion.

Jorge Adelmo
A mi nieto Juan Daniel, a mi hija Sandra
Rodrigo, a mis hijos
Camila Andrea, Diego Armando
iii

iv CAPITULO 0.
Indice general
Prefacio I
III
1. INTEGRALES IMPROPIAS 1
1.1. Integrales impropias de primera clase . . . . . . . . . . . . . 1
1.2. Integrales impropias de segunda clase . . . . . . . . . . . . . 7
1.2.1. Caso 1: . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.2. Caso 2: . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3. Criterios de convergencia . . . . . . . . . . . . . . . . . . . . 10
1.4. Funcion Gama . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2. TRANSFORMADA DE LAPLACE 15
2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2. Propiedades de la transformada de Laplace . . . . . . . . . . 20
2.3. Traslaciones y derivadas . . . . . . . . . . . . . . . . . . . . . 24
2.4. Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.5. Interpretacion de la convolucion . . . . . . . . . . . . . . . . . 34
2.6. Transformada de Laplace de la convolucion . . . . . . . . . . 39
2.7. T. de Laplace de una funcion periodica . . . . . . . . . . . . . 47
3. ECUACIONES DIFERENCIALES 51
3.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2. Estudio cualitativo . . . . . . . . . . . . . . . . . . . . . . . . 52
3.2.1. Puntos Atractores y Repulsores . . . . . . . . . . . . . 58
3.3. Estudio Analıtico . . . . . . . . . . . . . . . . . . . . . . . . . 59
v

vi INDICE GENERAL
3.4. Variables separables . . . . . . . . . . . . . . . . . . . . . . . 61
3.5. Homogeneas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.6. Ecuaciones diferenciales exactas . . . . . . . . . . . . . . . . . 66
3.6.1. Metodo de solucion de una ecuacion exacta . . . . . . 67
3.7. Lineales de primer orden . . . . . . . . . . . . . . . . . . . . . 72
3.8. Problemas de aplicacion . . . . . . . . . . . . . . . . . . . . . 76
Ley de enfriamiento de Newton . . . . . . . . . . . . . . . . . 78
3.9. Ecuaciones lineales homogeneas . . . . . . . . . . . . . . . . . 86
3.9.1. Ecuaciones no-homogeneas de segundo orden . . . . . 89
3.9.2. Ecuaciones diferenciales homogeneas de orden superior 101
3.9.3. Ecuaciones diferenciales no-homogeneas de orden su-
perior . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
3.10. Aplicaciones de las ecuaciones diferenciales . . . . . . . . . . 110
3.10.1. Circuitos electricos . . . . . . . . . . . . . . . . . . . 110
3.10.2. Movimiento libre no amortiguado . . . . . . . . . . . . 114
Ejemplos de movimientos amortiguados . . . . . . . . . . . . 125
Movimiento forzado . . . . . . . . . . . . . . . . . . . . . . . 129
3.11. Ecuaciones diferenciales de orden superior . . . . . . . . . . . 132
3.11.1. Con coeficientes variables . . . . . . . . . . . . . . . . 132
3.11.2. Ecuaciones de segundo orden no-homogeneas . . . . . 134
3.12. Sistemas de Ecuaciones Diferenciales . . . . . . . . . . . . . . 136
3.13. Solucion en serie de potencias . . . . . . . . . . . . . . . . . . 141
A. Sucesiones y series 147
A.1. Sucesiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
A.2. Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
A.2.1. Propiedades de las series convergentes . . . . . . . . . 152
A.3. Series geometricas . . . . . . . . . . . . . . . . . . . . . . . . 152
A.3.1. Convergencia de una serie geometrica . . . . . . . . . 153
A.4. Tabla de transformadas de Laplace . . . . . . . . . . . . . . . 156
A.5. Identidades trigonometricas . . . . . . . . . . . . . . . . . . . 157
Respuesta a ejercicios . . . . . . . . . . . . . . . . . . . . . . 159
Bibliografıa 163
Indice de materias
Capıtulo 1
INTEGRALES IMPROPIAS
Hasta el momento se han estudiado integrales definidas, en donde el in-
tervalo de integracion es de longitud finita, o en donde la funcion que se
esta integrando es acotada en dicho intervalo. El proposito es generalizar
estas ideas ampliando el intervalo de integracion a intervalos de longitud
infinita, es decir intervalos en que uno de los extremos, o los dos, sean in-
finitos; o estudiar integrales sobre intervalos finitos pero en donde la funcion
no sea acotada ya sea en uno de los extremos del intervalo o en algun punto
interior del intervalo de integracion. A este tipo de integrales se les llama
integrales impropias.
1.1. Integrales impropias de primera clase
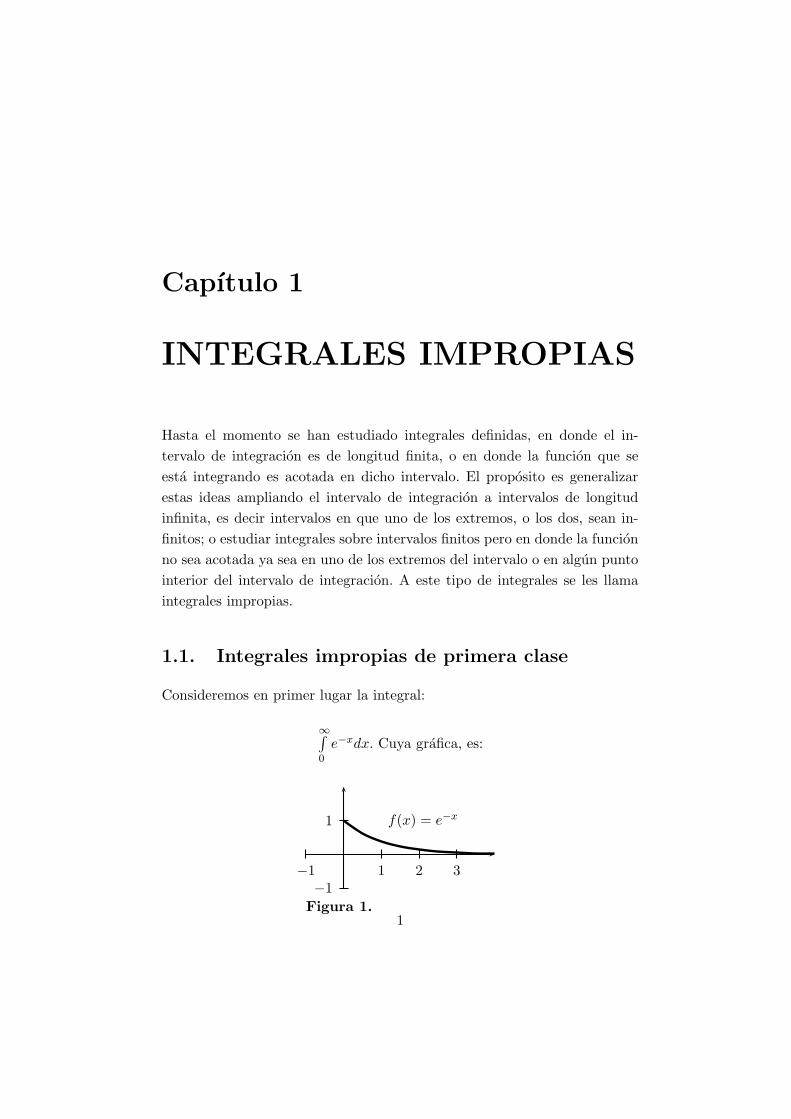
Consideremos en primer lugar la integral:
∞∫
0
e−xdx. Cuya grafica, es:
1 2 3−1
1
−1
f(x) = e−x
Figura 1.1

2 CAPITULO 1. INTEGRALES IMPROPIAS
En este caso, como la funcion a integrar es positiva en el intervalo [ 0,∞ ),
podemos considerar que la integral representa el area bajo la curva f(x) =
e−x. Para calcular dicha integral se calcula la integral definida∫ b0 e
−xdx en
donde b es cualquier numero mayor que cero, b > 0 y luego se calcula el
lımite cuando b tiende a infinito ası:
∞∫
0
e−xdx = lımb→∞
b∫
0
e−xdx = lımb→∞
[ −1ex∣∣b
0
]
= lımb→∞
[ −1eb
+1
e0
]
= 0 + 1 = 1 es decir:
∫ ∞
0e−xdx = 1. Se puede afirmar que:
∫ ∞
cf(x) dx, existe si la integral
∫ b
cf(x) dx existe para todo b ≥ c y
lımb→∞
∫ b
cf(x) dx existe y es finito. En este caso se escribe:
∫ ∞
cf(x)dx = lım
b→∞
∫ b
cf(x)dx.
En forma similar se puede definir:
∫ c
−∞f(x)dx = lım
a→−∞
∫ c
af(x)dx.
En ambos casos se dice que la integral es convergente. En los casos en que
los lımites no existan se dice que la integral es divergente.
Ejemplo 1.1.
∫ ∞
2
1
x(lnx)2dx = lım
b→∞
∫ b
2
1
x(lnx)2dx =
lımb→∞
[ −1lnx
∣∣∣
∞
2
]
= lımb→∞
[−1ln b
+1
ln 2
]
=1
ln 2
Ejemplo 1.2.
∫ 0
−∞
1
(2x− 1)3dx = lım
a→−∞
∫ 0
−∞
1
(2x− 1)3dx =
lıma→−∞
(−14
)
(2x− 1)−2∣∣∣
0
a= lım
a→−∞
[ −14(2,0− 1)2
+1
4(2a− 1)2
]
=1
4.

1.1. INTEGRALES IMPROPIAS DE PRIMERA CLASE 3
Ahora, si los lımites de integracion son ambos infinitos se define la integral
∫ ∞
−∞f(x) dx, de la siguiente manera:
∫ ∞
−∞f(x) dx =
∫ c
−∞f(x) dx+
∫ ∞
cf(x) dx, c ∈ R
siempre que las dos integrales de la derecha existan. En caso contrario se
dice que la integral:∫∞−∞ f(x) dx diverge.
Ejemplo 1.3.
f(x) =1
1 + x2
1 2−1−2
1
Figura 2.
∞∫
−∞
1
1 + x2dx =
c∫
−∞
1
1 + x2dx+
∞∫
c
1
1 + x2dx, c ∈ R
= lıma→−∞
c∫
a
1
1 + x2dx+ lım
b→∞
b∫
c
1
1 + x2dx
= lıma→−∞
(arctanx)∣∣∣
c
a+ lım
b→∞(arctanx)
∣∣∣
b
c
= lıma→−∞
(arctan c− arctan a) + lımb→∞
(arctan b− arctan c)
= arctan c− arctan (−∞) + arctan(∞)− arctan c
= −[
−π2
]
+π
2= π
4 CAPITULO 1. INTEGRALES IMPROPIAS
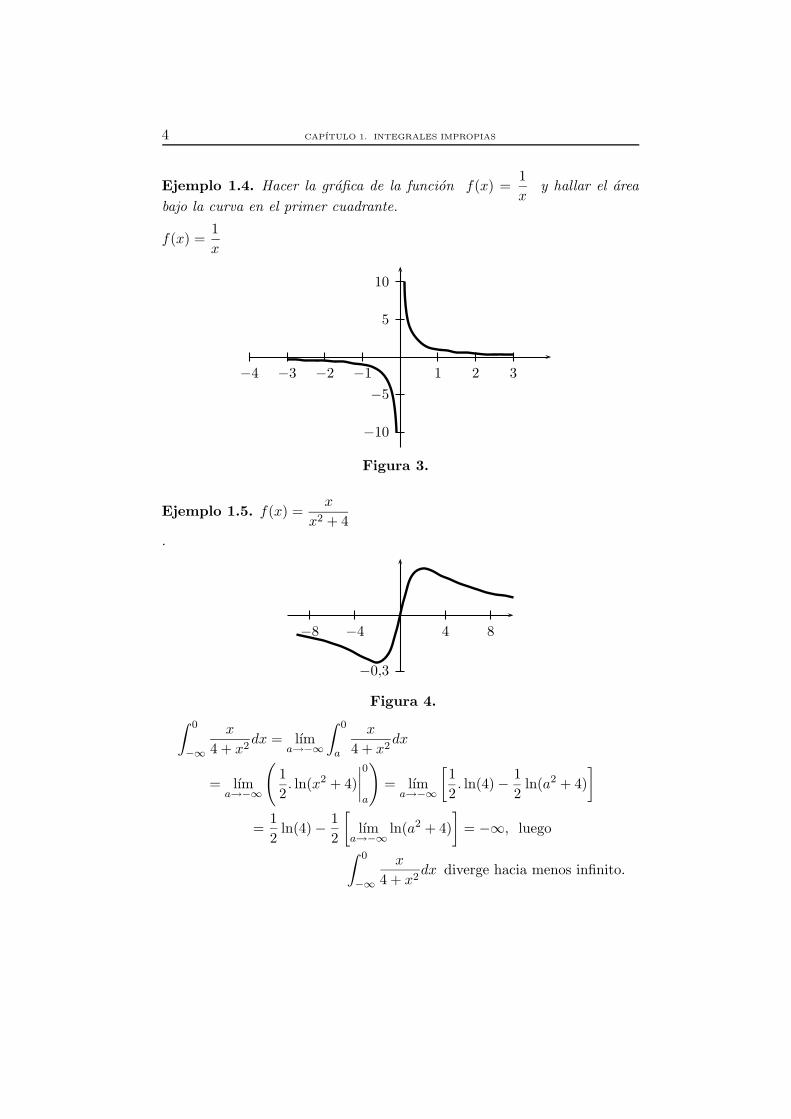
Ejemplo 1.4. Hacer la grafica de la funcion f(x) =1
xy hallar el area
bajo la curva en el primer cuadrante.
f(x) =1
x
1 2 3−1−2−3−4
5
10
−5
−10
Figura 3.
Ejemplo 1.5. f(x) =x
x2 + 4
.
4 8−4−8
−0,3
Figura 4.∫ 0
−∞
x
4 + x2dx = lım
a→−∞
∫ 0
a
x
4 + x2dx
= lıma→−∞
(
1
2. ln(x2 + 4)
∣∣∣∣
0
a
)
= lıma→−∞
[1
2. ln(4)− 1
2ln(a2 + 4)
]
=1
2ln(4)− 1
2
[
lıma→−∞
ln(a2 + 4)
]
= −∞, luego
∫ 0
−∞
x
4 + x2dx diverge hacia menos infinito.

1.1. INTEGRALES IMPROPIAS DE PRIMERA CLASE 5
Ejemplo 1.6. Hallar los valores de a y b, tales que:
∞∫
1
[2x2 + bx+ a
x(2x+ a)− 1
]
dx = 1.
Como el grado del polinomio del numerador es igual al grado del polinomio
del denominador se efectua la division y resulta:
∞∫
1
[2x2 + bx+ a
x(2x+ a)− 1
]
dx =
∞∫
1
[
1 +(b− a)x+ a
2x2 + ax− 1
]
dx
=
∞∫
1
[(b− a)x+ a
x(2x+ a)
]
dx =
∞∫
1
[A
x+
B
2x+ a
]
dx =
∞∫
1
[1
x+b− a− 2
2x+ a
]
dx
= lımc→∞
[
lnx+1
2(b− a− 2) ln( 2x+ a )
∣∣∣∣
c
1
]
= lımc→∞
[
ln(x) + ln(2x+ a)12(b−a−2)
∣∣∣
c
1
]
= lımc→∞
[
ln[
x(2x+ a)12(b−a−2)
]∣∣∣
c
1
]
este lımite existe si y solo si 12(b − a − 2) = −1, es decir, b − a − 2 = −2,
luego b = a, entonces,
lımc→∞
[
ln
(x
2x+ a
)∣∣∣∣
c
1
]
= lımc→∞
[
ln
(c
2c+ a
)
− ln
(1
2 + a
)]
=
ln
[1
2
]
+ ln[2 + a] = − ln(2) + ln(2 + a).
Como
∞∫
1
[2x2 + bx+ a
x(2x+ a)− 1
]
dx = 1, entonces,
− ln(2) + ln(2 + a) = 1. Por consiguiente, a = 2e− 2.

6 CAPITULO 1. INTEGRALES IMPROPIAS
Ejercicios 1.7.
Evaluar cada una de las siguientes integrales impropias:
1)
∫ ∞
4xe−x2dx 2)
∫ ∞
0
x2
(x3 + 1)2dx
3)
∫ ∞
2
1
(1− x)23
dx 4)
∫ ∞
2
1
x lnxdx
5)
∫ ∞
0
1√exdx 6)
∫ −1
−∞
1
x3dx
7)
∫ 1
−∞
1
(5x+ 3)3dx 8)
∫ ∞
−∞
1√x2 + 4
dx
9)
∫ ∞
−∞
1
x2 + 8x+ 25dx 10)
∫ ∞
−∞
x
e|x|dx
11)
∫ ∞
0e−2x sin(3x)dx 12)
∫ ∞
0t2e−tdt
13) Para cierto valor de α, la integral∞∫
0
[1√
1+2x2− α
x+1
]
dx es convergente.
halle este, o estos valores y calcule la integral.
14) Encontrar el area de la region bajo la curva de f(x) =2
4x2 − 1, a la
derecha de x = 1.
15) Encontrar el volumen del solido generado en la grafica del ejemplo (1.4)
al rotar la superficie del primer cuadrante acotada por las siguientes curvas:
y =1
x, x = 1, y y = 0,
i) alrededor del eje x ii) alrededor del eje y
16) Encontrar el area bajo la curva de f(x) =1
x2 + x, a la derecha de x = 1
17) En teorıa electromagnetica el potencial magnetico v, de un punto sobre
el eje de una bobina circular esta dado por:
v = Ar∞∫
a
1
(r2 + x2)32
dx, donde A y r, son constantes. Evalue v.

1.2. INTEGRALES IMPROPIAS DE SEGUNDA CLASE 7
1.2. Integrales impropias de segunda clase
1.2.1. Caso 1:
En algunos casos se presentan integrales definidas en un intervalo semia-
bierto de la forma [ a, b ) con la propiedad siguiente: lımx→b−
|f(x)| = ∞. Si
suponemos que la integral:t∫
af(x)dx existe para todo t, a ≤ t < b, entonces
podemos definir,b∫
af(x)dx= lım
t→b−
t∫
af(x)dx, siempre que el lımite exista. En tal caso decimos
queb∫
af(x)dx, es convergente. Si el lımite no existe decimos que la integral es
divergente. En forma similar, se define la integral de una funcion f , definida
en un intervalo de la forma ( a, b ], con la condicion siguiente: lımx→a+
f(x) =∞.
Ejemplo 1.8.
∫ 1
0
lnx√xdx = lım
ε→0+
∫ 1
ε
lnx√xdx, si u =
√x
= lımε→0+
[
4√x ln√x− 4
√x∣∣1
ε
]
= lımε→0+
[
−4√1− 4
√ε ln ε+ 4
√ε]
= −4
Ejemplo 1.9.
1∫
−1
√
1 + x
1− xdx = lım
c→1−
c∫
−1
√
1 + x
1− xdx = lım
c→1−
c∫
−1
√1 + x.
√1− x√
1− x.√1− x
dx
= lımc→1−
c∫
−1
√1− x2
1− xdx, haciendo x = sinα, tenemos:
= lımc→1−
[
arcsinx−√
1− x2∣∣∣
c
−1
]
= lımc→1−
[
arcsin c−√
1− c2 − arcsin(−1)]
=π
2−[
−π2
]
= π

8 CAPITULO 1. INTEGRALES IMPROPIAS
Ejercicios 1.10.
Calcular, si existe, cada una de las siguientes integrales impropias:
1)
2∫
1
1
(x− 1)13
dx 2)
7∫
3
1√x− 3
dx
3)
1∫
0
1√1− x2
dx 4)
3∫
0
x√9− x2
dx
5)
1∫
0
lnxdx 6)
1∫
−2
1
(x+ 1)43
dx
7)
1∫
0
lnx
xdx 8)
4∫
0
1√4− x
dx
9)
4∫
0
x√16− x2
dx 10)
1∫
−1
√1− x
1 + xdx
11)
1∫
0
√1− x
xdx 12)
2∫
0
√2− x
xdx
1.2.2. Caso 2:
Existen funciones definidas en un intervalo I de la forma [ a, b ], que son
continuas en dicho intervalo, excepto en un punto c ∈ [ a, b ] en donde se
cumple: lımx→c|f(x)| =∞, en este caso se puede definir:
b∫
af(x)dx, de la sigui-
ente manera:
b∫
af(x)dx =
c∫
af(x)dx+
b∫
cf(x)dx, siempre que las dos integrales de la derecha
converjan. En caso contrario, se dice que la integral (de la izquierda) diverge.

1.2. INTEGRALES IMPROPIAS DE SEGUNDA CLASE 9
Ejemplo 1.11. Sea f(x)= 13√x2
∫ 27
−1
13√x2dx =
∫ 0
−1
13√x2dx+
∫ 27
0
13√x2dx =
lımε→0−
∫ ε
−1
13√x2dx+ lım
δ→0+
∫ 27
δ
13√x2dx = lım
ε→0−
[
3x13
∣∣∣
ε
−1
]
+ lımδ→0+
[
3x13
∣∣∣
27
δ
]
= lımε→0−
3[
ε13 − (−1) 13
]
+ lımδ→0+
3[
2713 − (δ)
13
]
= 3 + 9 = 12
Ejemplo 1.12.
∫ 2
−1
1
x4dx =
∫ 0
−1
1
x4dx+
∫ 2
0
1
x4dx = lım
ε→0−
∫ ε
−1
1
x4dx+ lım
δ→0+
∫ 2
δ
1
x4dx
= lımε→0−
[ −13x3
∣∣∣∣
ε
−1
]
+ lımδ→0+
[
−13x3
∣∣∣∣
2
δ
]
= lımε→0−
[−13ε3
+1
3(−1)3]
+ lımδ→0+
[ −13(2)3
+1
3(δ)3
]
= −∞+∞.
Luego la integral es divergente. Como las dos integrales divergen, concluimos
que la integral propuesta diverge.
Ejercicios 1.13.
Evaluar cada una de las siguientes integrales impropias o demostrar que
divergen.
1)
4∫
1
1
(x− 3)23
dx 2)
1∫
−3
x
(x2 − 4)23
dx
3)
2∫
0
3
x2 + x− 2dx 4)
2∫
−1
1
xdx

10 CAPITULO 1. INTEGRALES IMPROPIAS
5)
2∫
0
1
3x− 4dx 6)
2∫
12
1
x 5√lnx
dx
7 ) Demuestre que lımh→0+
[−h∫
−1
1
xdx+
1∫
h
1
xdx
]
= 0.
En algunos casos es imposible calcular (si existe) el valor de la integral
impropia directamente. Sin embargo se puede estudiar la convergencia o
divergencia de esta mediante el uso de los metodos indirectos conocidos,
entre ellos los criterios de comparacion directo e indirecto.
1.3. Criterios de convergencia
Teorema 1.14 (Criterio de comparacion directo ).
Si la integral∫ ba f(x)dx, existe para cada b ≥ a y si 0 < f(x) ≤ g(x), para
todo x, con x ≥ a, y si∫∞a g(x) dx converge, entonces, la integral
∫∞a f(x)dx
converge. En este caso se dice que la integral∫∞a g(x) dx, domina la inte-
gral∫∞a f(x)dx. Ahora, si
∫∞a f(x) dx diverge, tambien diverge
∫∞a g(x)dx.
Teorema 1.15 (Criterio de comparacion por paso al lımite ).
Si las dos integrales∫ ba f(x)dx y
∫ ba g(x)dx, existen para cada b ≥ a, sien-
do f(x) > 0 y g(x) > 0 para todo x, con x ≥ a, y si lımx→∞
f(x)
g(x)= c,
0 < c <∞, entonces, las dos integrales∫ ba f(x)dx e
∫ ba g(x)dx convergen
o ambas divergen.
La escogencia de la funcion g(x) de los teoremas 1.14 y 1.15, dependen en
cierta forma de algunas habilidades que las personas desarrollan mediante:
1) La observacion de ejercicios resueltos.
2) La practica y desarrollo de otros ejercicios. La idea es tratar de aprender
de cada ejercicio resuelto y no limitarse al solo desarrollo.
Ejemplo 1.16.
Probar la convergencia de la integral:
∫ ∞
1
1
x4(x4 + 1)dx

1.3. CRITERIOS DE CONVERGENCIA 11
En efecto, como 1 ≤ 1 + x4 , para todo x ≥ 1, entonces
x4 ≤ (1 + x4)x4, para todo x ≥ 1.
Luego1
x4(x4 + 1)≤ 1
x4, para todo x ≥ 1.
Ahora,
∫ ∞
1
1
x4dx = lım
b→∞
[
−13x3
∣∣∣∣
b
1
]
=1
3, es decir que:
∫ ∞
1
1
x4dx es convergente y por el teorema 1.14,
∫ ∞
1
1
x4(x4 + 1)dx, es convergente.
Ejemplo 1.17. Probar la convergencia de la integral:∞∫
1
e−x2dx.
Como x2 ≥ x, para todo x > 1, entonces −x2 ≤ −x, luego: e−x2 ≤ e−x
por ser ex una funcion creciente. Ahora, como la integral∞∫
1
e−xdx = lımb→∞
[−1ex
∣∣b
0
]
= 1, entonces la integral∞∫
1
e−xdx es convergente.
Concluimos que:∞∫
1
e−x2dx, es convergente.
Ejemplo 1.18. Probar que la integral∞∫
1
x√x4+1
dx diverge.
Como lımx→∞
[ x√x4+11x
]
= lımx→∞
[x2√x4+1
]
= lımx→∞
[x2
x2√x4
x4+ 1
x4
]
= lımx→∞
1√
1+ 1
x4
= 1.
Ademas, como la integral:∞∫
1
1
xdx, es divergente, por el teorema 1.15 se con-
cluye que la integral∞∫
1
x√x4 + 1
dx es divergente.

12 CAPITULO 1. INTEGRALES IMPROPIAS
1.4. Funcion Gama
Una de las funciones usadas en teorıa de comunicaciones es la funcion gama
que se denota con el sımbolo: Γ y se define de la siguiente manera:
Γ(x) =
∫ ∞
0tx−1e−t dt, para x > 0.
Mediante la integracion por partes se concluye que: Γ(x+ 1) = xΓ(x).
En efecto,
Γ(x + 1) =∞∫
0
txe−tdt, si hacemos u = tx y dv = e−tdt, se tiene que,
du = x tx−1 dt y v = −e−t, es decir que,
Γ(x+ 1) = lımb→∞
b∫
0
txe−tdt = lımb→∞
[
−txet
∣∣∣∣
b
0
+ xb∫
0
tx−1e−tdt
]
= lımb→∞
[−bxeb
+ 0
]
+ x lımb→∞
b∫
0
tx−1e−tdt=x∞∫
0
tx−1e−tdt.
Concluimos que Γ(x+ 1) = xΓ(x).
Veamos que Γ(1) = 1 =∞∫
0
e−tdt
Como Γ(n+ 1) = nΓ(n), entonces Γ(2) = 1Γ(1) = 1
Γ(3) = 2Γ(2) = 2.(1) = 2
Γ(4) = 3Γ(3) = 3.(2) = 6. Se puede concluir que Γ(n+ 1) = n!
La prueba se hara por induccion sobre n.
1) Γ(1) = 1 = 0!
2) Supongamos que Γ(n+ 1) = n! y veamos que
3) Γ(n+ 1 + 1) = (n+ 1)!. En efecto:
Γ(n+ 1 + 1) = (n+ 1)Γ(n+ 1) = (n+ 1)n! = (n+ 1)!
Significa que la funcion Γ generaliza el concepto de factorial de un numero
entero no negativo a cualquier numero real no negativo x.
Ahora se puede ver que la integral:∞∫
0
tx−1e−tdt =1∫
0
tx−1e−tdt+∞∫
1
tx−1e−tdt
Se debe probar que cada integral impropia de la derecha del igual es con-
vergente. En efecto, veamos que:
lımt→∞
ta
et= 0, para cualquier numero real positivo a, sea n =
[|a|](la parte

1.4. FUNCION GAMA 13
entera de a), entonces, usando la regla de L’hopital (n+1)veces se tiene:
lımt→∞
ta
et= lım
t→∞a(a− 1)(a− 2)..(a− n)[a− (n+ 1)]ta−(n+1)
et
= lımt→∞
a(a− 1)(a− 2)..(a− n)(a− n− 1)
t(n+1)−aet= 0
En particular, tomando a = x+ 1, es decir: lımt→∞
tx+1
et = 0;
Luego podemos escribir: 0 < tx+1
et ≤ 1, para todo t ≥M .
Por lo tanto la integral∞∫
M
tx−1e−tdt ≤∞∫
M
1t2dt
Como la integral de la derecha de la desigualdad es convergente, usando el
criterio de comparacion, se concluye que la integral∞∫
M
tx−1e−tdt es conver-
gente, y por consiguiente∞∫
1
tx−1e−tdt es convergente. Finalmente, veamos
que la integral:1∫
0
tx−1e−tdt, es convergente. Si hacemos t = 1u , entonces,
dt = −1u2du, luego:
1∫
0
tx−1e−tdt =1∫
∞
[(1u
)x−1e−1u
(−1u2
)]
du
=∞∫
1
u1−xe−1u
u2du =
∞∫
1
u−1−xe−1u du
Como u ∈ [1,∞) se tiene que: 0 < e−1u < u−1−x, entonces,
u−1−xe−1u < u−1−x, luego
∞∫
1
tx−1e−tdt =∞∫
1
u−1−xe−1u du <
∞∫
1
u−1−xdx. Como∞∫
1
u−1−xdx
= lımb→∞
b∫
1
u−1−xdx= lımb→∞
[
u−x
−x
∣∣∣
b
1
]
= lımb→∞
[−1xux
∣∣b
1
]
= lımb→∞
[ −1xbx + 1
x
]= 1
x , x > 0. Se tiene que:
∞∫
1
u−1−xdu, es convergente para x > 0. Luego,1∫
0
tx−1e−tdt, es convergente.
Concluimos que la∞∫
0
tx−1e−tdt tambien es convergente.

14 CAPITULO 1. INTEGRALES IMPROPIAS
Ejercicios 1.19. Usar el criterio de comparacion directo o el criterio de
comparacion por paso al lımite para estudiar la convergencia de cada una de
las siguientes integrales impropias
1)
∞∫
1
1√x6 + x
dx 2)
∞∫
1
lnx
e2xdx 3)
∞∫
3
lnx
xdx
4)
∞∫
1
lnx
x3dx 5)
∞∫
2
1√v − 1
dv 6)
∞∫
2
1√x2 − 1
dx
7)
∞∫
1
√x+ 1
x2dx 8)
∞∫
2
x√x4 − 1
dx 9)
∞∫
π
1 + sinx
x2dx
10)
∞∫
π
2 + cosx
xdx 11)
∞∫
4
1√x− 1
dx 12)
12∫
0
1
1− xdx
13)
∞∫
0
1√x6 + 1
dx 14)
∞∫
0
1
1 + exdx 15)
∞∫
4
2
x32 − 1
dx
16)
∞∫
1
ex
xdx 17)
∞∫
2
1
lnxdx 18)
∞∫
ee
ln lnxdx
19)
∞∫
0
1√x2 + 1
dx 20)
∞∫
0
1
ex + e−xdx 21)
∞∫
0
1√x6 + 1
dx
22)
∞∫
0
1√x8 + 1
dx
Capıtulo 2
TRANSFORMADA DE
LAPLACE
2.1. Introduccion
Por su aplicacion en ingenierıa especialmente en electronica, uno de los temas
mas importantes de la matematica es el de las “transformadas”. Son opera-
dores que actuan sobre funciones con variables determinadas, por ejemplo
el tiempo y las convierte en funciones con otra variable, por ejemplo la fre-
cuencia, refiriendonos a una senal cualquiera la transformada de Laplace,
por ejemplo convierte problemas analıticos de derivadas e integrales en pro-
blemas algebraicos cuya solucion es mucho mas sencilla. El operador trans-
formada de Laplace denotado L, se define ası:
L : f(t)→ F (s)
Definicion 2.1. Lf(t) =∞∫
0
f(t)e−stdt, siempre que la integral de la
derecha exista.
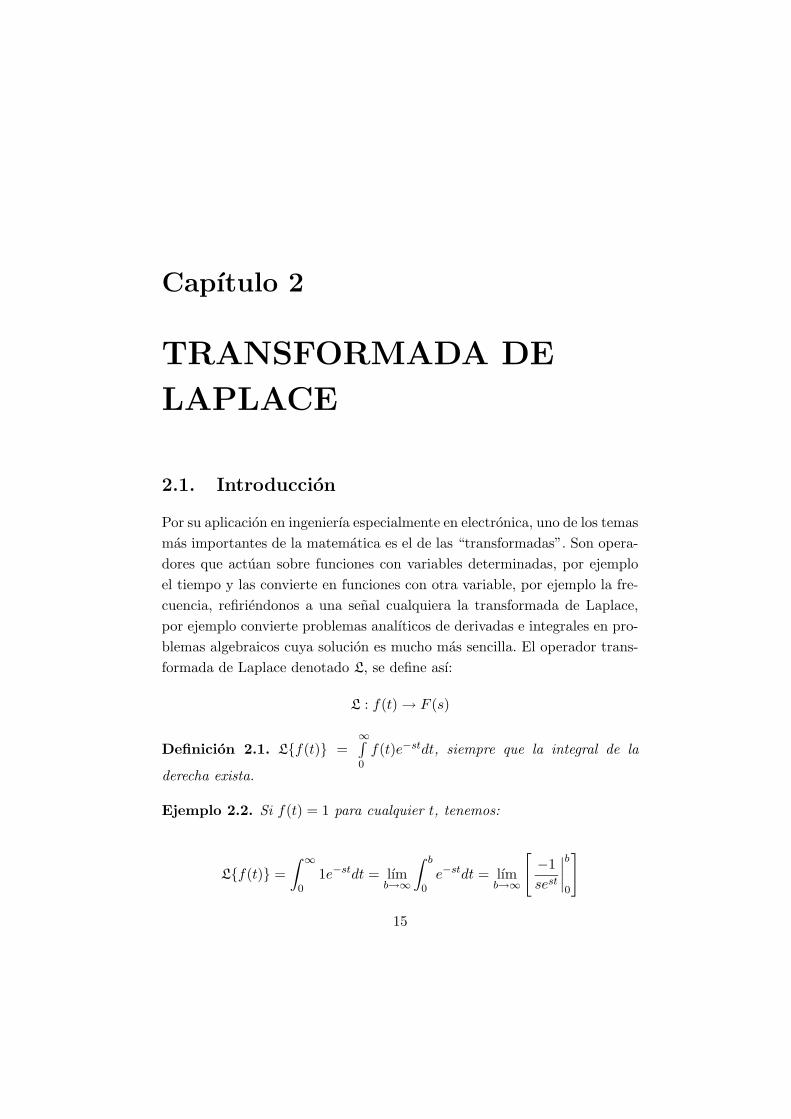
Ejemplo 2.2. Si f(t) = 1 para cualquier t, tenemos:
Lf(t) =∫ ∞
01e−stdt = lım
b→∞
∫ b
0e−stdt = lım
b→∞
[
−1sest
∣∣∣∣
b
0
]
15
16 CAPITULO 2. TRANSFORMADA DE LAPLACE
= lımb→∞
[ −1sesb
+1
se0
]
=1
s, si s > 0.
2 4 6
1
f(t) = 1
Figura 5.
t 2 4 6
1F (s) = 1
s
Figura 6.
s
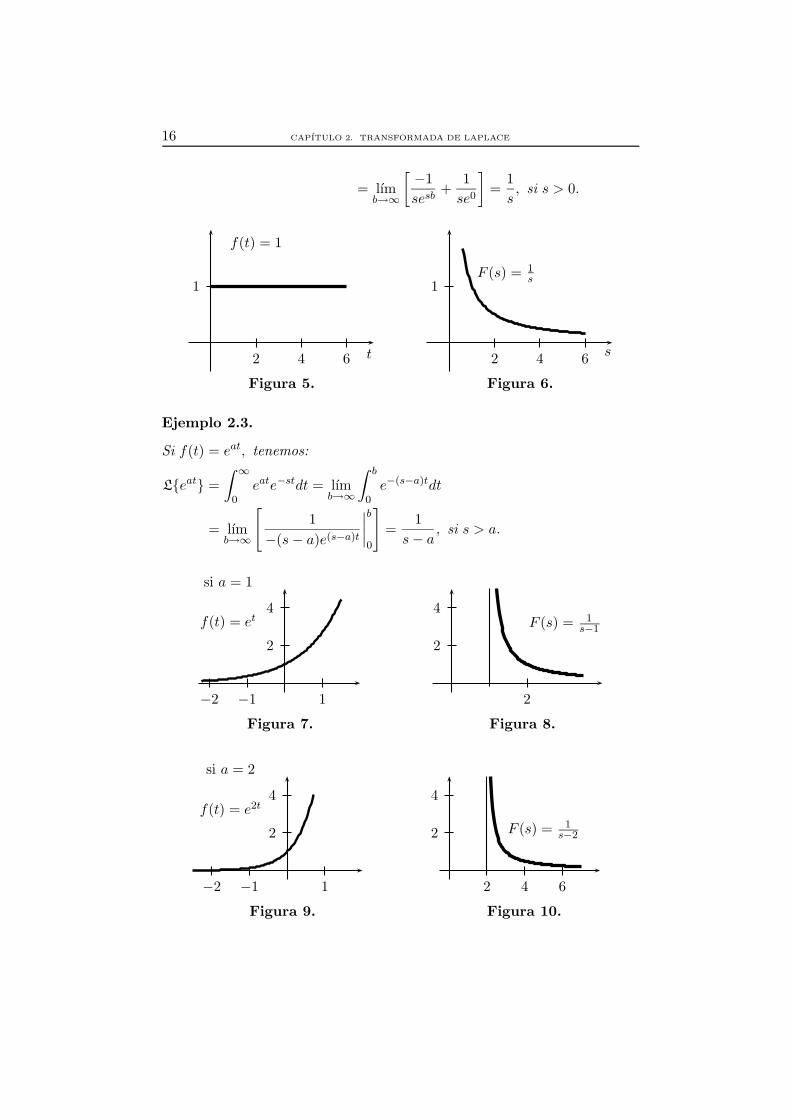
Ejemplo 2.3.
Si f(t) = eat, tenemos:
Leat =∫ ∞
0eate−stdt = lım
b→∞
∫ b
0e−(s−a)tdt
= lımb→∞
[
1
−(s− a)e(s−a)t
∣∣∣∣
b
0
]
=1
s− a, si s > a.
1−1−2
2
4f(t) = et
si a = 1
Figura 7.
2
2
4F (s) = 1
s−1
Figura 8.
1−1−2
2
4f(t) = e2t
Figura 9.
si a = 2
2 4 6
2
4
F (s) = 1s−2
Figura 10.

2.1. INTRODUCCION 17
Se observa que la grafica se va trasladando hacia la derecha o izquierda segun
el valor de a.
NOTA
si f(t) es una funcion y existe la transformada de Laplace de f(t),es decir si Lf(t) = F (s), entonces, las funciones f(t) y F (s) son pares
trasformados de Laplace y se escribe: f(t)↔ F (s)
la pregunta obvia es: ¿cuales funciones tienen transformada de Laplace? es
decir, como caracterizar las funciones f que tienen transformada de Laplace.
Se conocen las condiciones suficientes que debe cumplir una funcion f para
que exista su transformada de Laplace, a saber: Una funcion f tiene trasfor-
mada de Laplace si:
1) f es continua parte por parte en [0,∞) es decir, si existe un numero finito
de puntos x1, x2, . . . , xn en los que f es discontinua y f es continua en cada
intervalo (xi, xi+1) ademas f es acotada.
2) f es una funcion de orden exponencial en el sentido que existen constantes
positivas c y M tales que |f(t)| ≤Mect, para t > T .
Prueba
Supongamos que f es una funcion continua parte por parte y que es de orden
exponencial, entonces:
Lf(t) =∞∫
0
f(t)e−stdt =T∫
0
f(t)e−stdt +∞∫
T
f(t)e−stdt
la primera integral existe pues se puede escribir como suma finita de inte-
grales en las que cada una de ellas es continua y por tanto integrable. Para
la segunda integral se tiene lo siguiente:
∣∣∣
∫ ∞
Tf(t)e−stdt
∣∣∣ ≤
∫ ∞
Tf(t)e−stdt ≤M
∞∫
T
ecte−stdt
= M
∫ ∞
Te−(s−c)tdt = lım
b→∞M
∫ ∞
Te−(s−c)tdt
= lımb→∞
[ −M(s− c)e(s−c)t
∣∣∣
b
T
]

18 CAPITULO 2. TRANSFORMADA DE LAPLACE
=M
(s− c)e(s−c)T, si s > c.
Con esto se prueba que la integral∞∫
0
f(t)e−stdt existe y por tanto que
Lf(t) existe.Se debe hacer notar el hecho de que la funcion f sea continua parte por
parte y de orden exponencial es una condicion suficiente para la existencia
de la transformada de Laplace pero no es una condicion necesaria, ya que
por ejemplo la funcion f(t) = 1√tno es continua parte por parte en [0,∞) y
su transformada existe.
Existe la transformada de Laplace para algunas funciones generalizadas co-
mo las llamadas “distribuciones”entre ellas la delta de Dirac.
Mas ejemplos de transformadas
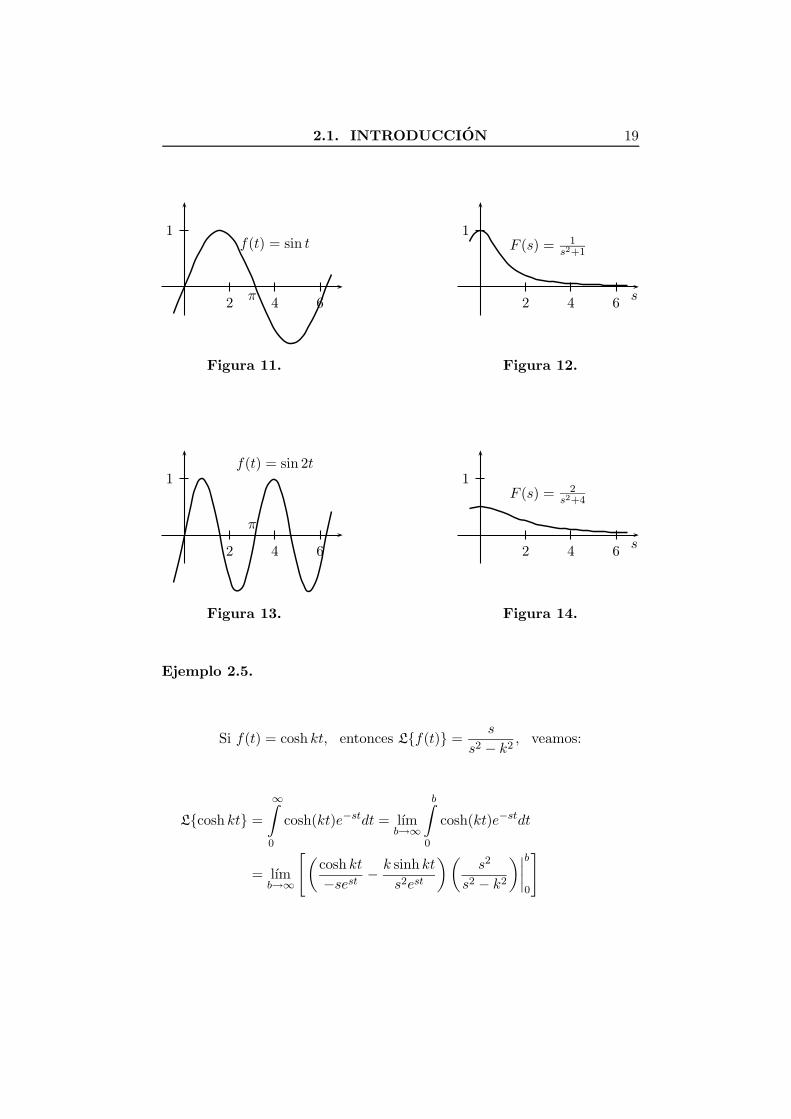
Ejemplo 2.4.
Si f(t) = sin kt, k constante, entonces, Lf(t) = k
s2 + k2, s > 0,
veamos:
Lsin kt =∫ ∞
0sin kt e−stdt = lım
b→∞
∫ b
0sin kt e−stdt
= lımb→∞
[− sin kt
−sest +k cos kt
s2est
] [1
s2 + k2
]∣∣∣∣
b
0
= lımb→∞
[
− sin kb
−sesb +k cos kb
s2esb
] [1
s2 + k2
]
=ks2
s2(s2 + k2), luego Lsin kt = k
s2 + k2, s > 0
2.1. INTRODUCCION 19
2 4 6
1f(t) = sin t
π
Figura 11.
2 4 6
1F (s) = 1
s2+1
Figura 12.
s
2 4 6
1f(t) = sin 2t
π
Figura 13.
2 4 6
1F (s) = 2
s2+4
Figura 14.
s
Ejemplo 2.5.
Si f(t) = cosh kt, entonces Lf(t) = s
s2 − k2, veamos:
Lcosh kt =∞∫
0
cosh(kt)e−stdt = lımb→∞
b∫
0
cosh(kt)e−stdt
= lımb→∞
[(cosh kt
−sest −k sinh kt
s2est
)(s2
s2 − k2
)∣∣∣∣
b
0
]

20 CAPITULO 2. TRANSFORMADA DE LAPLACE
= lımb→∞
[(cosh kb
−sesb −k sinh kb
s2esb+
1
s
)(s2
s2 − k2
)∣∣∣∣
b
0
]
, luego:
Lcosh kt = s
s2 − k2
Ejercicios 2.6.
Calcule la transformada de Laplace de cada una de las siguientes funciones:
1) f(t) = cos kt
2) f(t) = sinh kt
3) f(t) = eat
4) f(t) = t2
5) f(t) = t3
2.2. Propiedades de la transformada de Laplace
Si Lf(t) y Lg(t) existen, entonces:1) Lf(t) + g(t) = Lf(t)+ Lg(t)2) Lkf(t) = kLf(t)
Las pruebas de estas dos propiedades son sencillas y se dejan como ejercicios
para el lector.
Ejercicios 2.7.
Encontrar la transformada de Laplace de las siguientes funciones:
1) f(t) = sin2 t
2) f(t) = cos2 t
3) f(t) = sin(2t) cos(3t)
4) f(t) = sin(2t) sin(3t)
5) f(t) = cos(3t) cos(5t)
Use las siguientes identidades:
a) sin(a+ b) + sin(a− b) = 2 sin(a) cos(b)

2.2. PROPIEDADES DE LA TRANSFORMADA DELAPLACE 21
b) sin(a+ b)− sin(a− b) = 2 cos(a) sin(b)
c) cos(a− b)− cos(a+ b) = 2 sin(a) sin(b)
d) cos(a+ b) + cos(a− b) = 2 cos(a) cos(b)
e) sin2 a =1− cos 2a
2
f) cos2 a =1 + cos 2a
2
6) f(t) = (t− 1)2
7) f(t) = (t− 2)3
NOTA:
Si la transformada de Laplace de una funcion f(t) es F (s) entonces deci-
mos que la transformada inversa de Laplace de F (s) es f(t), y escribimos:
L−1F (s) = f(t), ademas al par de funciones F (s) y f(t) lo llamamos par
transformado, lo que escribimos:
F (s) ←→ f(t), como por ejemplo:
sin kt ←→ k
s2 + k2
cos kt ←→ s
s2 + k2
eat ←→ 1
s− a
1 ←→ 1
s
Es claro que si f(t) = L−1F (s) y g(t) = L−1G(s), entonces:
1) f(t) + g(t) = L−1F (s) +G(s)2) kf(t) = L−1kF (s)
Ejemplo 2.8.
Evaluar: L−1
[3
s(s2 + 1)
]
.

22 CAPITULO 2. TRANSFORMADA DE LAPLACE
Utilizando fracciones parciales se encuentra que:
3
s(s2 + 1)=
3
s− 3s
s2 + 1, luego
L−1
[3
s(s2 + 1)
]
= L−1
[3
s− 3s
s2 + 1
]
= 3L−1
[1
s
]
− 3L−1
[s
s2 + 1
]
= 3(1)− 3 cos t = 3(1− cos t), concluimos que:
L−1
[3
s(s2 + 1)
]
= 3(1− cos t)
Teorema 2.9.
Si f(t) = tn, entonces Lf(t) = n!
sn+1.
Por induccion sobre n, tenemos:
1) Si n = 1, entonces, Lt =∞∫
0
te−stdt = lımb→∞
b∫
0
te−stdt
= lımb→∞
[ −tsest− 1
s2est
]∣∣∣∣
b
0
=1
s2=
1!
s2
2) Supongamos que Ltk = k!
sk+1y probemos que Ltk+1 = (k + 1)!
s(k+1)+1.
En efecto: Ltk+1 =∞∫
0
tk+1e−stdt = lımb→∞
b∫
0
tk+1e−stdt
= lımb→∞
[
tk+1
−sest∣∣∣∣
b
0
+(k + 1)
s
b∫
0
tke−stdt
]
=(k + 1)
s
∞∫
0
tke−stdt
=(k + 1)
sLtk = (k + 1)
s
k!
sk+1=
(k + 1)!
s(k+1)+1
Teorema 2.10.
Si f(t) = tα, α ∈ R, entonces, Ltα = Γ(α+ 1)
sα+1. En efecto:
Ltα =∞∫
0
tαe−stdt, α > −1, haciendo u = tα y dv = e−stdt, tenemos que
du = αtα−1dt y v =−e−st
s, por lo tanto
∞∫
0
tαe−stdt = lımb→∞
b∫
0
tαe−stdt = lımb→∞
[
−tαsest
∣∣∣∣
b
0
+1
s
b∫
0
αtα−1e−stdt
]
=1
sα
∞∫
0
tα−1e−stdt, si u = st, du = sdt, entonces

2.2. PROPIEDADES DE LA TRANSFORMADA DELAPLACE 23
=α
s
∞∫
0
[u
s
]α−1e−u 1
sdu =
α
s2s−α+1
∞∫
0
uα−1e−udu = αsα+1
∞∫
0
uα−1e−udu
=α
sα+1
∞∫
0
tα−1e−tdt=α
sα+1Γ(α) =
αΓ(α)
sα+1, si α > −1. Conclusion
Ltα = Γ(α+ 1)
sα+1, si α > −1.
Ejemplo 2.11.
Lt− 12 = Γ
(12
)
s1/2=
√π
s1/2
Ejercicios 2.12.
i) Usar la definicion para calcular la transformada de Laplace de cada una
de las siguientes funciones:
1) f(t) = et+5 2) f(t) = e−2t+4
3) f(t) = t2e3t 4) f(t) = t sin 2t
5) f(t) = t2 cos 3t 6) f(t) = t sinh 3t
7) f(t) =
2t+ 1, 0 < t ≤ 1
0, si t > 1.
8) f(t) =
−1, 0 ≤ t ≤ 2
1, si t > 2.
ii) Usar las transformadas vistas hasta el momento y las propiedades para
calcular Lf(t) en cada caso.
1) f(t) = 4t− 10
2) f(t) = t2 + 6t− 5
3) f(t) = (t+ 2)3
4) f(t) = (2t+ 1)2
5) f(t) = 6t2 + 2 sin 3t
6) f(t) = (et + e−t)2
7) f(t) = 5 sin 3t+ 2 cos 2t
8) f(t) = e−t sin 3t

24 CAPITULO 2. TRANSFORMADA DE LAPLACE
9) f(t) = t12
10) f(t) = t32
iii) Usar las propiedades de la transformada inversa y los pares transforma-
dos estudiados hasta ahora para calcular:
1) L−1 3s4 2) L−1(2s+ 1)2
s3
3) L−13s+
2
s2− 5
s6 4) L−1 1
3s+ 1
5) L−1 4s
s2 + 9 6) L−1 7
s2 + 2
7) L−1 3s+ 2
s2 + 16 8) L−1 s
(s2 + 4)(s+ 2)
9) L−1 s
s2 + 2s− 3 10) L−1 1
s2 + s− 20
2.3. Traslaciones y derivadas
Traslaciones y derivadas en el dominio y recorrido de L
El calculo de transformadas de Laplace de funciones como: g(t) = tnf(t);
g(t) = eatf(t); g(t) = tneatf(t) Usando la definicion no es elemental pues
ella involucra integrales que generalmente no son faciles de calcular, o bien,
su calculo es largo y tedioso. Desarrollar propiedades nos permitira hacer
calculos mucho mas sencillos.
Teorema 2.13 (Teorema de Traslaciones:). Si a es un numero real
cualquiera se cumple que: Leatf(t) = F (s− a) en donde Lf(t) = F (s)
En efecto: Leatf(t)=∞∫
0
eatf(t)e−stdt
=∞∫
0
e−(s−a)tf(t)dt = F (s− a)
Ejemplo 2.14.
Le3tt2 = 2
(s− 3)3, pues : Lt2 = 2
s3, luego F (s− 3) =
2
(s− 3)3
Ejemplo 2.15.
Como Lsin 4t = 4
s2 + 16, entonces Le−2t sin 4t = 4
(s+ 2)2 + 16

2.3. TRASLACIONES Y DERIVADAS 25
Ejemplo 2.16.
Se sabe que Lcosh 3t = s
s2 − 9, entonces
Le2t cosh 3t = s− 2
(s− 2)2 − 9, y como L−1 s
s2 + 25
= cos 5t, entonces L−1 s− 3
(s− 3)2 + 25 = e3t cos 5t, tambien
L−1 s+ 1
s2 + 4s+ 10 = L−1 s+ 1
(s+ 2)2 + 6
= L−1 s+ 2− 1
(s+ 2)2 + 6 = L−1 s+ 2
(s+ 2)2 + 6− 1
(s+ 2)2 + 6
= L−1 s+ 2
(s+ 2)2 + 6 − L−1 1
(s+ 2)2 + 6
= e−2t cos√6t− 1√
6L−1
√6
(s+ 2)2 + 6. Se concluye :
L−1 s+ 1
s2 + 4s+ 10 = e−2t cos
√6t− 1√
6L−1
√6
(s+ 2)2 + 6
Una de las senales estudiadas en electronica es la llamada escalon unitario,
denotada µ(t) o Φ(t) definida ası:
µ(t) =
1, si t ≥ 0
0, si t < 0., cuya grafica es:
t
µ(t)
Figura 15.
De hecho, si a es un numero real se cumple que:
µ(t− a) =
1, si t ≥ a
0, si t < a.

26 CAPITULO 2. TRANSFORMADA DE LAPLACE
Ejemplo 2.17. Si a=2:
−2 2 t
y = µ(t− 2)
Figura 16.
Es evidente que cuando se multiplica una funcion f por la funcion µ(t− a),el resultado es la anulacion de la funcion f para valores de t menores que a,
ası:
f(t) = sin t , g(t) = sin t µ(t). Graficamente:
−a
y = µ(t− a)
a t
y = f(t)
Figura 17.
−a a t
y = f(t)µ(t− a)
Figura 18.Ahora, si se considera la funcion y = f(t) y se traslada a unidades a la
derecha, es decir si se considera la funcion y = f(t− a), a > 0, y si ademas,
se multiplica por la funcion µ(t − a), es decir si se considera la funcion
y = f(t− a)µ(t− a) el resultado es la traslacion de la funcion f , a unidades
a la derecha y la anulacion de todo valor de t menor que a . La transformada
de Laplace de esta ultima funcion es:
Lf(t− a)µ(t− a) =∞∫
0
f(t− a)µ(t− a)e−st dt
=a∫
0
f(t− a)µ(t− a)e−stdt +∞∫
af(t− a)µ(t− a) e−st dt

2.3. TRASLACIONES Y DERIVADAS 27
=∞∫
af(t− a) e−st dt, si τ = t− a, dτ = dt, y la anterior integral, queda:
=∞∫
af(τ) e−s(τ+a) dτ= e−sa
∞∫
af(τ) e−sτ dτ= e−sa F (s), donde
F (s) = Lf(t)
Ejemplo 2.18. Lsin(t− 2π)µ(t− 2π) = e−2πs 1
s2 + 1
Ejemplo 2.19. si
f(t) =
2, si 0 ≤ t ≤ 3
−2, si t > 3., entonces
f(t) = 2− 4µ(t− 3), y ası
Lf(t) = L2− 4µ(t− 3) = L2 − 4Lµ(t− 3) = 2
s− 4e−3s
s
Ejemplo 2.20. si
f(t) =
0, si 0 ≤ t < 1
t2, si t ≥ 1., entonces
f(t) = (t− 1)2µ(t− 1) + 2(t− 1)µ(t− 1) + µ(t− 1), luego
Lf(t) = L(t− 1)2µ(t− 1) + 2(t− 1)µ(t− 1) + µ(t− 1)= L(t− 1)2µ(t− 1)+ L2(t− 1)µ(t− 1)+ Lµ(t− 1)
=2e−s
s3+
2e−s
s2+e−s
s
Ejemplo 2.21. si
f(t) =
0, si 0 ≤ t ≤ 3π2
sin t, si t >3π
2.
, entonces
Como cos(t− 3π2 ) = cos t cos 3π
2 + sin 3π2 sin t = − sin t, entonces
f(t) = − cos(t− 3π2 )µ(t− 3π
2 ), luego
Lf(t) = L− cos(t− 3π2 )µ(t− 3π
2 ) = −se− 3πs
2
s2 + 1

28 CAPITULO 2. TRANSFORMADA DE LAPLACE
Ejercicios 2.22.
i. Use fracciones parciales y \o los pares transformados estudiados aquı, para
calcular la transformada inversa de cada funcion.
1) F (s) =s+ 2
s(s2 + 4)
2) F (s) =5
s2(s2 + 1)
3) F (s) =3s+ 2
s2 + 6s+ 25
4) F (s) =s+ 3
s2 − 10s+ 4
5) F (s) =s− 4
s2 − 2s+ 5
6) F (s) =3
s(s2 + 4s+ 13)ii. Escriba cada una de las siguientes funciones en terminos de funciones
escalon unitario.
1) f(t) =
−2, si 0 ≤ t < 3
3, si t ≥ 3.
2) f(t) =
1, si 0 ≤ t < 4
0, si 4 ≤ t < 5.
1, si t ≥ 5.
3) f(t) =
0, si 0 ≤ t < 1
t3, si t ≥ 1.
4) f(t) =
sin t, si 0 ≤ t < 2π
0, si t ≥ 2π.
5) f(t) =[|t|], donde
[|t|]= n, si n ≤ t < n+ 1
iii. Calcule la transformada de Laplace de cada una de las funciones del
ejercicio ii.

2.3. TRASLACIONES Y DERIVADAS 29
Teorema 2.23 ( Derivada de una transformada).
Ltnf(t) = (−1)n dn
dsnLf(t)
La prueba se hace por induccion. En efecto:
1) Si n = 1, entonces:d
dtLf(t)= d
ds
∞∫
0
f(t)e−stdt=∞∫
0
f(t)d
dse−stdt
=∞∫
0
f(t)[−te−st]dt=-∞∫
0
tf(t)e−stdt=−Ltf(t), es decir
Ltf(t)=− d
dsF (s)
2) Supongamos que el resultado es valido para n = k y probemos para
n = k + 1. En efecto:dk+1
dsk+1F (s)=
d
ds
[dk
dskF (s)
]
=d
ds(−1)kLtkf(t) por hipotesis de induccion. Ahora,
d
ds(−1)kLtkf(t)= d
ds
[
(−1)k∞∫
0
tkf(t)e−stdt
]
= (−1)k dds
∞∫
0
tkf(t)e−stdt = (−1)k(−1)∞∫
0
tktf(t)e−stdt
= (−1)k+1∞∫
0
tk+1f(t)e−stdt = (−1)k+1Ltk+1f(t), luego
(−1)k+1 dk+1
dsk+1F (s)=Ltk+1f(t), y esto completa la prueba.
Ejemplo 2.24.
Lt sin 2t = − d
ds
[2
s2 + 4
]
= −[ −4s(s2 + 4)2
]
, luego
Lt sin 2t = 4s
(s2 + 4)2
Ejemplo 2.25. Lte2t=− d
ds
[1
s− 2
]
=−[ −1(s− 2)2
]
=1
(s− 2)2
Ejercicios 2.26. Calcular la transformada de Laplace de cada una de las
siguientes funciones:
1) f(t) = t2 cos 3t
2) f(t) = t3 sinh 2t
30 CAPITULO 2. TRANSFORMADA DE LAPLACE
3) f(t) = tµ(t− 1)
4) f(t) = t2 cosh 3t
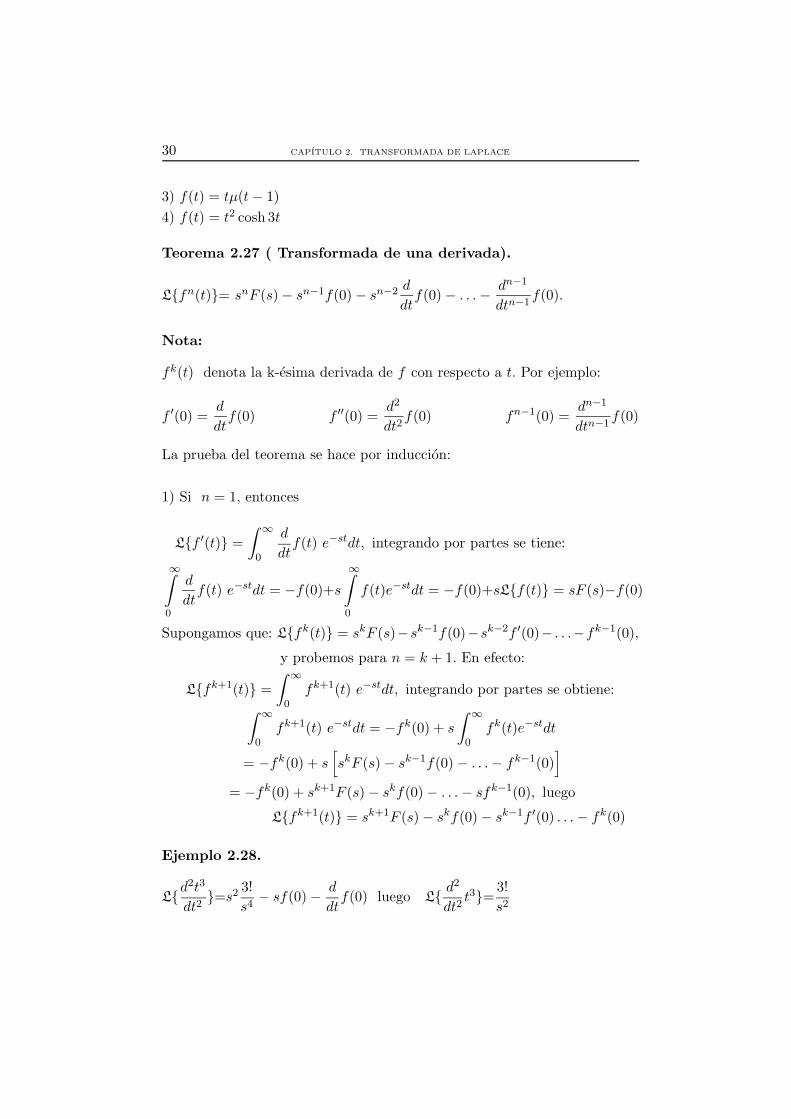
Teorema 2.27 ( Transformada de una derivada).
Lfn(t)= snF (s)− sn−1f(0)− sn−2 d
dtf(0)− . . .− dn−1
dtn−1f(0).
Nota:
fk(t) denota la k-esima derivada de f con respecto a t. Por ejemplo:
f ′(0) =d
dtf(0) f ′′(0) =
d2
dt2f(0) fn−1(0) =
dn−1
dtn−1f(0)
La prueba del teorema se hace por induccion:
1) Si n = 1, entonces
Lf ′(t) =∫ ∞
0
d
dtf(t) e−stdt, integrando por partes se tiene:
∞∫
0
d
dtf(t) e−stdt = −f(0)+s
∞∫
0
f(t)e−stdt = −f(0)+sLf(t) = sF (s)−f(0)
Supongamos que: Lfk(t) = skF (s)−sk−1f(0)−sk−2f ′(0)− . . .−fk−1(0),
y probemos para n = k + 1. En efecto:
Lfk+1(t) =∫ ∞
0fk+1(t) e−stdt, integrando por partes se obtiene:
∫ ∞
0fk+1(t) e−stdt = −fk(0) + s
∫ ∞
0fk(t)e−stdt
= −fk(0) + s[
skF (s)− sk−1f(0)− . . .− fk−1(0)]
= −fk(0) + sk+1F (s)− skf(0)− . . .− sfk−1(0), luego
Lfk+1(t) = sk+1F (s)− skf(0)− sk−1f ′(0) . . .− fk(0)
Ejemplo 2.28.
Ld2t3
dt2=s2 3!
s4− sf(0)− d
dtf(0) luego L d
2
dt2t3=3!
s2

2.3. TRASLACIONES Y DERIVADAS 31
Ejemplo 2.29.
L ddt
cos t=s s
s2 + 1− 1=
s2
s2 + 1− 1 =
s2 − s2 − 1
s2 + 1=−1
s2 + 1
Teorema 2.30 ( Cambio de escala en el dominio).
Si f(t)←→ F (s), es decir si: Lf(t)=F (s) y a es un numero real positivo,
entonces: f(at)←→ 1
aF (
s
a).
En efecto:
Lf(at) =∫ ∞
0f(at) e−st dt, si hacemos τ = at, dτ = a dt
entonces la integral anterior se escribe:
=
∞∫
0
f(τ) e−sτa1
adτ =
1
aF(s
a
)
, luego: Lf(at) = 1
aF(s
a
)
Ejemplo 2.31. Si f(t) = (2t)2, entonces:
Lf(t)=L(2t)2=1
2
2!(s
2
)3=1
2
2!
s3
8
=8
s3
Nota
Una de las aplicaciones importantes de la transformada de Laplace es la
solucion de algunas ecuaciones diferenciales con condiciones iniciales.
y′(t) =d
dty(t) y′′(t) =
d2
dt2y(t)
Ejemplo 2.32. Resolver la siguiente ecuacion diferencial:
d2
dt2y(t) + 3
d
dty(t) + 2y(t) = 0, y(0) = 3, y′(0) = 1

32 CAPITULO 2. TRANSFORMADA DE LAPLACE
Aplicando la transformada de Laplace en cada miembro de la ecuacion difer-
encial se obtiene:
L d2
dt2y(t) + 3
d
dty(t) + 2y(t) = L0
L d2
dt2y(t)+ L3 d
dty(t)+ L2y(t) = L0
L d2
dt2y(t)+ 3L d
dty(t)+ 2Ly(t) = 0
Si
Ly(t) = Y (s)
entonces:
s2Y (s)− sy(0)− d
dty(0) + 3[sY (s)− 3] + 2Y (s) = 0
s2Y (s) + 3sY (s) + 2Y (s) = 3s+ 10
Y (s)[s2 + 3s+ 2
]= 3s+ 10
Y (s) =3s+ 10
s2 + 3s+ 2=
3s+ 10
(s+ 2)(s+ 1),
aplicando fracciones parciales tenemos:
Y (s) =7
s+ 1− 4
s+ 2.
Calculando la transformada inversa de Laplace en cada miembro de la
ultima ecuacion, se obtiene:
L−1Y (s) = L−1 7
s+ 1− 4
s+ 2
luego,
y(t) = 7e−t − 4e−2t

2.4. CONVOLUCION 33
Ejercicios 2.33. Solucionar cada una de las ecuaciones diferenciales suje-
tas a las condiciones iniciales que se indican.
1.d2
dt2y(t) + 5
d
dty(t) + 6y(t) = e−t, y(0) = 2, y′(0) = 1
2.d
dty(t) + 2y(t) = 1, y(0) = 1
3.d
dty(t) + 2y(t) = cos t, y(0) = 1
4.d2
dt2y(t) + 4
d
dty(t) + 3y(t) = 1, y(0) = 2, y′(0) = 1
5.d2
dt2y(t) + 4
d
dty(t) + 3y(t) = e−3t, y(0) = 0, y′(0) = 1
6.d3
dt3y(t) + 3
d2
dt2y(t) + 2
d
dty(t) + 6y(t) = e2t,
con y(0) = 0, y′(0) = 0, y′′(0) = 0
2.4. Convolucion
Se dara la definicion para funciones causales (son funciones cuyo dominio
son los numeros reales positivos y el cero).
Definicion 2.34. Si dos funciones f y g son continuas parte por parte,
la convolucion entre f y g se denota f(t) ∗ g(t) y se define de la siguiente
manera:
f(t) ∗ g(t)=t∫
0
f(τ)g(t− τ)dτ
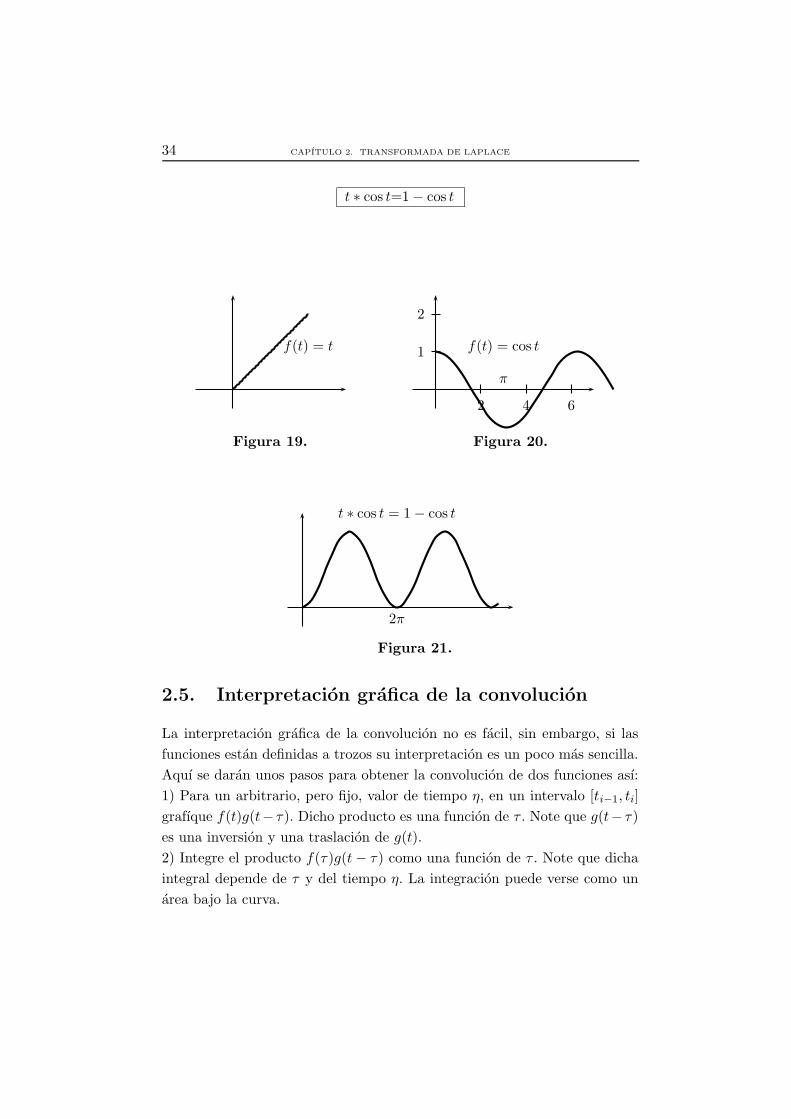
Ejemplo 2.35. Si f(t) = t, y g(t) = cos t, entonces:
f(t) ∗ g(t) = t ∗ cos t =t∫
0
τ cos(t− τ)dτ
=t∫
0
τ [cos t cos τ + sin t sin τ ]dτ =cos tt∫
0
τ cos τdτ + sin tt∫
0
τ sin τdτ
=cos t[τ sin τ + cos τ |t0
]+sin t
[−τ cos τ + sin τ |t0
]
=cos t [t sin t+ cos t− 1] + sin t [−t cos t+ sin t]= 1− cos t
concluimos que:
34 CAPITULO 2. TRANSFORMADA DE LAPLACE
t ∗ cos t=1− cos t
f(t) = t
Figura 19.
2 4 6
1
2
f(t) = cos t
π
Figura 20.
t ∗ cos t = 1− cos t
Figura 21.
2π
2.5. Interpretacion grafica de la convolucion
La interpretacion grafica de la convolucion no es facil, sin embargo, si las
funciones estan definidas a trozos su interpretacion es un poco mas sencilla.
Aquı se daran unos pasos para obtener la convolucion de dos funciones ası:
1) Para un arbitrario, pero fijo, valor de tiempo η, en un intervalo [ti−1, ti]
grafıque f(t)g(t− τ). Dicho producto es una funcion de τ . Note que g(t− τ)es una inversion y una traslacion de g(t).
2) Integre el producto f(τ)g(t− τ) como una funcion de τ . Note que dicha
integral depende de τ y del tiempo η. La integracion puede verse como un
area bajo la curva.
2.5. INTERPRETACION DE LA CONVOLUCION 35
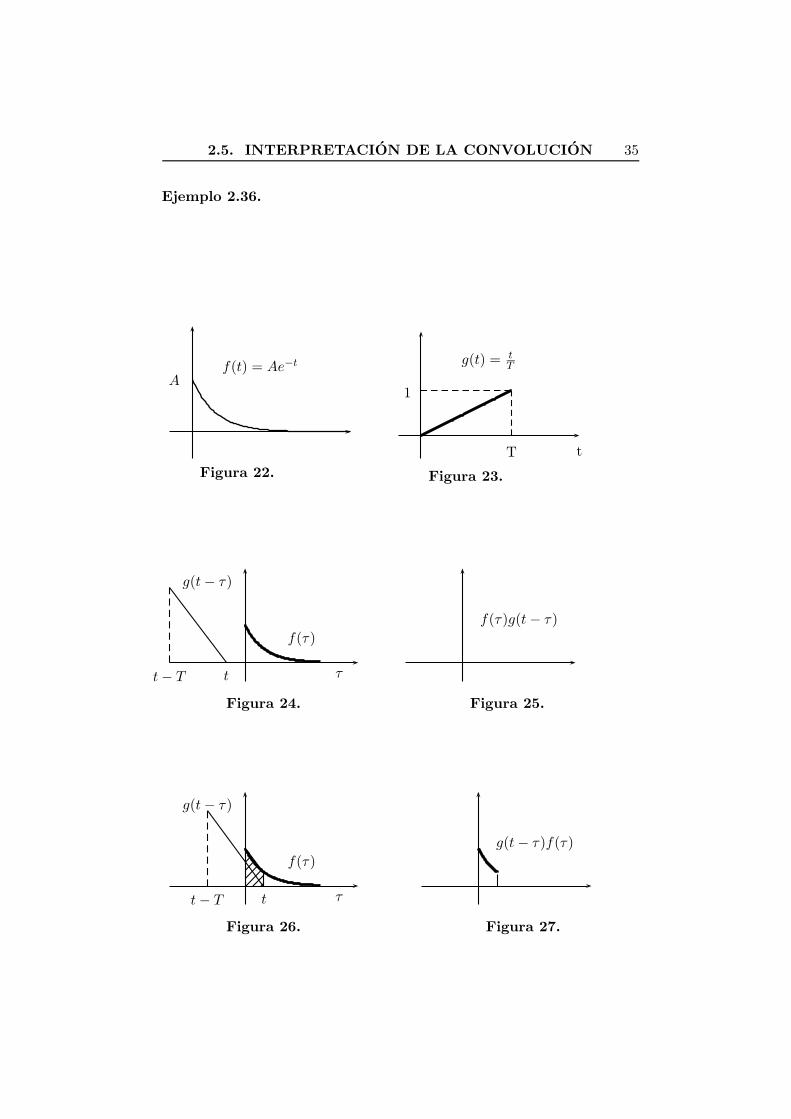
Ejemplo 2.36.
f(t) = Ae−t
A
Figura 22.
g(t) = tT
Figura 23.
1
T t
τ
g(t− τ)
f(τ)
tt− T
Figura 24.
f(τ)g(t− τ)
Figura 25.
τ
g(t− τ)
f(τ)
tt− T
Figura 26.
g(t− τ)f(τ)
Figura 27.
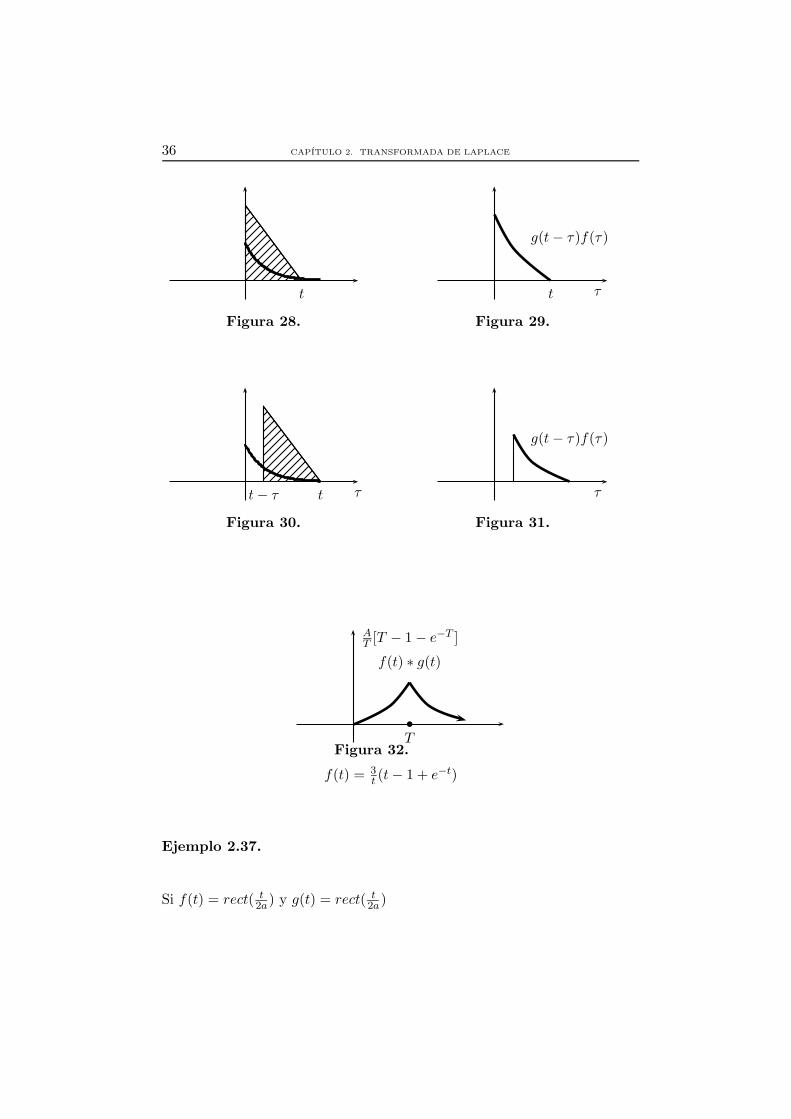
36 CAPITULO 2. TRANSFORMADA DE LAPLACE
Figura 28.
t
g(t− τ)f(τ)
Figura 29.
τt
Figura 30.
t τt− τ
g(t− τ)f(τ)
Figura 31.
τ
f(t) ∗ g(t)
AT [T − 1− e−T ]
Figura 32.T•
f(t) = 3t (t− 1 + e−t)
Ejemplo 2.37.
Si f(t) = rect( t2a) y g(t) = rect( t
2a)
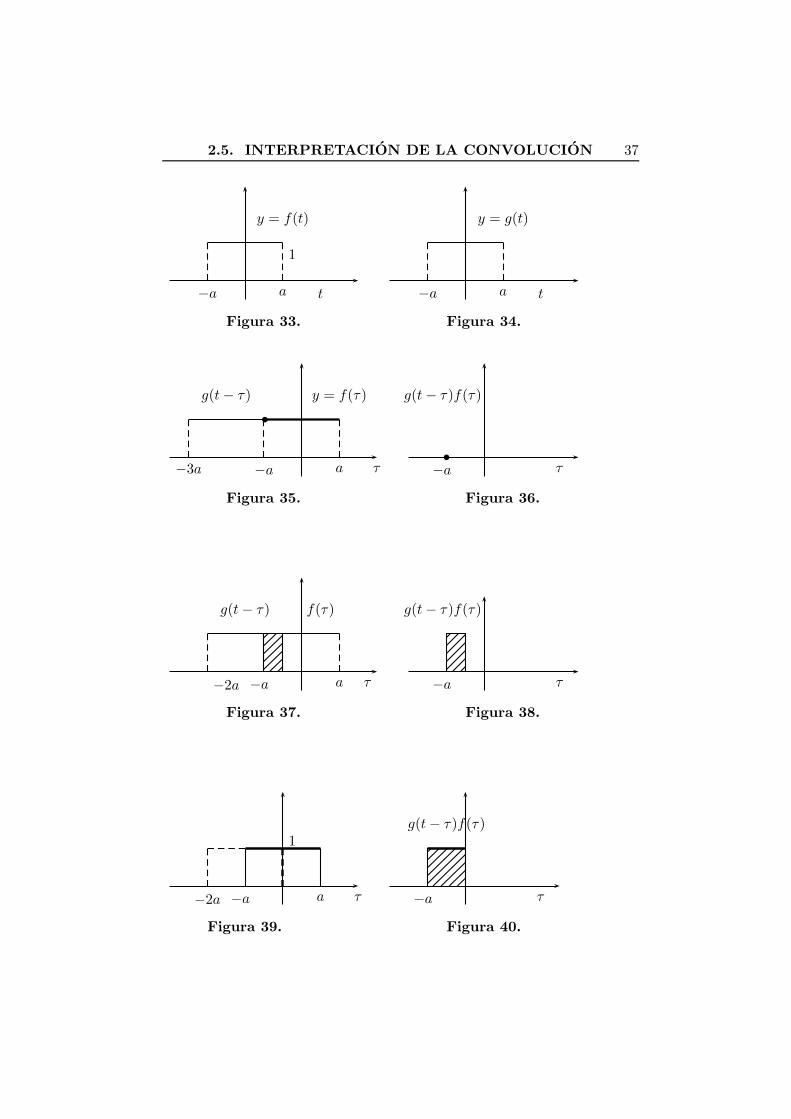
2.5. INTERPRETACION DE LA CONVOLUCION 37
−a
1
a t
y = f(t)
Figura 33.
−a a t
y = g(t)
Figura 34.
−a
g(t− τ)
−3a a τ
•y = f(τ)
Figura 35.
•−a τ
g(t− τ)f(τ)
Figura 36.
−a−2a
g(t− τ)
a
f(τ)
τ
Figura 37.
−a τ
g(t− τ)f(τ)
Figura 38.
−a−2a τa
1
Figura 39.
−a τ
g(t− τ)f(τ)
Figura 40.

38 CAPITULO 2. TRANSFORMADA DE LAPLACE
−a τa
1
Figura 41.
−a
1
τ
g(t− τ)f(τ)
Figura 42.
−a τa
Figura 43.
a−a
1
τ
g(t− τ)f(τ)
Figura 44.
−a τa
1
Figura 45.
a−a
1
τ
g(t− τ)f(τ)
Figura 46.
−a τa 2a
Figura 47.
a
1
τ
Figura 48.
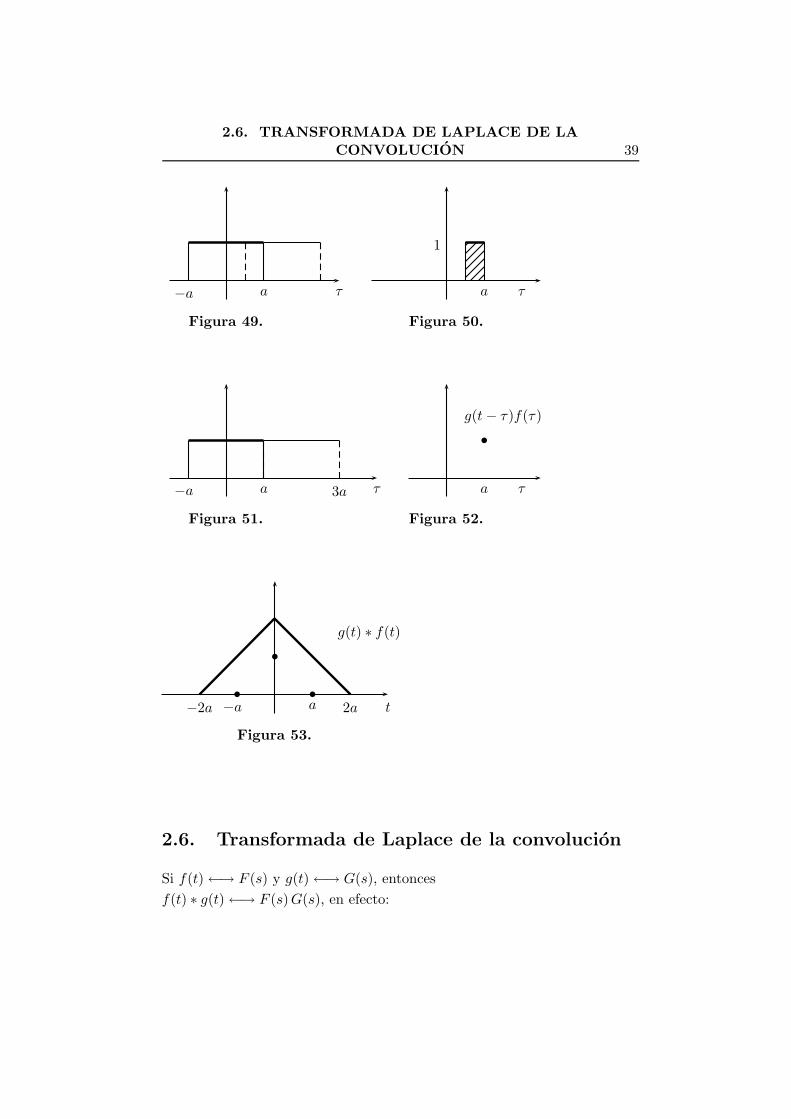
2.6. TRANSFORMADA DE LAPLACE DE LACONVOLUCION 39
−a τa
Figura 49.
a
1
τ
Figura 50.
−a τa 3a
Figura 51.
a
•
τ
g(t− τ)f(τ)
Figura 52.
−a••
•
ta 2a−2a
g(t) ∗ f(t)
Figura 53.
2.6. Transformada de Laplace de la convolucion
Si f(t)←→ F (s) y g(t)←→ G(s), entonces
f(t) ∗ g(t)←→ F (s)G(s), en efecto:
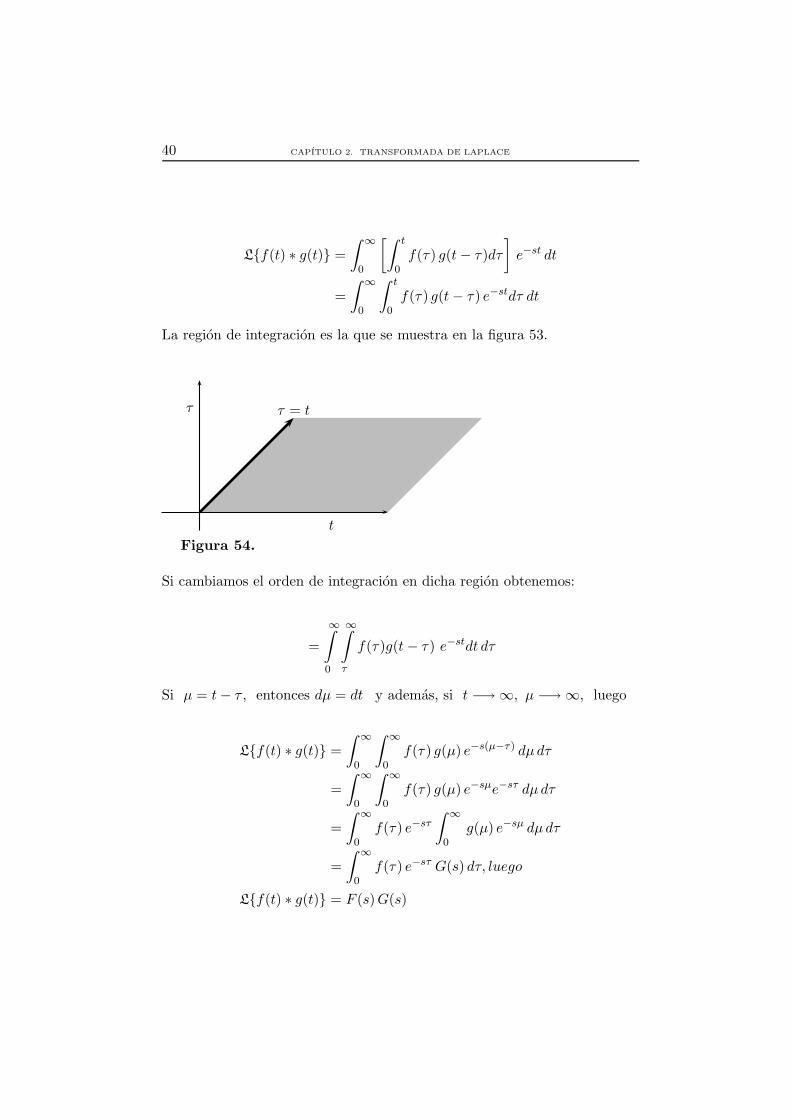
40 CAPITULO 2. TRANSFORMADA DE LAPLACE
Lf(t) ∗ g(t) =∫ ∞
0
[∫ t
0f(τ) g(t− τ)dτ
]
e−st dt
=
∫ ∞
0
∫ t
0f(τ) g(t− τ) e−stdτ dt
La region de integracion es la que se muestra en la figura 53.
τ = t
t
τ
Figura 54.
Si cambiamos el orden de integracion en dicha region obtenemos:
=
∞∫
0
∞∫
τ
f(τ)g(t− τ) e−stdt dτ
Si µ = t− τ , entonces dµ = dt y ademas, si t −→∞, µ −→∞, luego
Lf(t) ∗ g(t) =∫ ∞
0
∫ ∞
0f(τ) g(µ) e−s(µ−τ) dµ dτ
=
∫ ∞
0
∫ ∞
0f(τ) g(µ) e−sµe−sτ dµ dτ
=
∫ ∞
0f(τ) e−sτ
∫ ∞
0g(µ) e−sµ dµ dτ
=
∫ ∞
0f(τ) e−sτ G(s) dτ, luego
Lf(t) ∗ g(t) = F (s)G(s)

2.6. TRANSFORMADA DE LAPLACE DE LACONVOLUCION 41
Se puede probar que la convolucion cumple las siguientes propiedades:
1)(f(t) ∗ g(t)
)∗ h(t) = f(t) ∗
(g(t) ∗ h(t)
)
2)f(t) ∗ g(t) = g(t) ∗ f(t)
Ahora, si g(t)=1 y f(t) es cualquier funcion, entonces:
1 ∗ f(t) =∫ t
0f(τ)dτ, luego
Lt∫
0
f(τ)dτ = F (s)
s, si F (s)←→ f(t)
Algunos fenomenos fısicos tales como: una descarga electrica, el chispaso que
se produce al unir dos cables de energıa, un golpe dado a una estructura de
un puente, el golpe de un bate sobre una bola de beisbol, etc . . . , ocurren en
un periodo muy pequeno de tiempo “casi cero” y su representacion mediante
una senal es:
δ(t)
t
Figura 55.
•
Dicha funcion se llama delta de Dirac o simplemente la funcion delta. En
algunos casos se llama la funcion impulso. Esta funcion dio origen a la lla-
mada teorıa de las distribuciones o de las funciones generalizadas. Matema-
ticamente esta definida por:
∫ t2
t1
f(t)δ(t) dt = f(0), t1 < 0 < t2, si f(t) es continua en t = 0.

42 CAPITULO 2. TRANSFORMADA DE LAPLACE
Ademas satisface las siguientes propiedades:
1) δ(0)→∞2) δ(t) = 0, si t 6= 0
3)
∫ ∞
−∞δ(t)dt = 1
4) δ(t) = δ(−t)
Notemos ademas que si y = δ(t− t0), entonces la grafica es:
t
Figura 56.
•t0
Geometricamente se puede visualizar de la siguiente forma:
Se definen las funciones δa(t) ası:
δa(t) =
−1a2|t|+ 1
a, si − a ≤ t ≤ a
0, si |t| > a
−2
δ2(t) =
+t
4+
1
2, si − 2 ≤ t < 0
−t4
+1
2, si 0 ≤ t ≤ 2.
0, si |t| > 2
12
t2Figura 57.
Estas funciones tienen las siguientes propiedades:

2.6. TRANSFORMADA DE LAPLACE DE LACONVOLUCION 43
∞∫
−∞δa(t)dt=
a∫
−aδa(t)dt = 1. Ademas:
lıma→0
δa(t) = δ(t) =
∞, si t = 0
0, si t 6= 0
y la grafica de la suma de algunas funciones delta, como las de la figura 55,
digamos y =4∑
i=1δ(t− i), es:
tFigura 58.
• •••1 2 3 4
y
que se presentan en teorıa de las comunicaciones y se conocen como tren
de impulsos.
De acuerdo con la definicion de la funcion impulso se tiene que:
Lδ(t)=∞∫
0
δ(t)e−stdt=e−s0=1 es decir que 1←→ δ(t), ademas
δ(t) ∗ f(t)=t∫
0
f(t− τ)δ(τ)dτ = f(t)
Ya se ha visto que una de las aplicaciones de la transformada de Laplace es la
solucion de ecuaciones diferenciales con condiciones iniciales. A continuacion
se presentan algunos ejemplos que involucran la funcion delta.
Ejemplo 2.38. Resolver la siguiente ecuacion diferencial:d2
dt2y(t) + 16y(t) = δ(t− 2π), y(0) = 0, y′(0) = 0
Notemos que la ecuacion original se puede escribir en la forma:d2
dt2y(t) + 16y(t) = δ(t− 2π)µ(t− 2π)
Calculando la transformada de Laplace en cada miembro de la ecuacion se
obtiene:
L d2
dt2y(t) + 16y(t) = Lδ(t− 2π)µ(t− 2π)

44 CAPITULO 2. TRANSFORMADA DE LAPLACE
s2Y (s)− sy(0)− d
dty(0) + 16Y (s) = e−2πs
Usando las condiciones iniciales dadas, se obtiene:
s2Y (s) + 16Y (s) = e−2πs, factorizando Y (s), se obtiene:
Y (s)[s2 + 16] = e−2πs
Y (s) =e−2πs
s2 + 16. Calculando la transformada inversa se obtiene:
y(t) =1
4sin 4(t− 2π)µ(t− 2π), o tambien:
y(t) =1
4sin 4t µ(t− 2π), es decir:
y(t) =
14 sin 4t, si t ≥ 2π
0 si 0 ≤ t < 2π
Ejemplo 2.39. Solucionar la ecuacion diferencial siguiente:d2
dt2y(t)− 7
d
dty(t) + 6y(t) = et + δ(t− 2) + δ(t− 4), y(0) = 0, y′(0) = 0
La anterior ecuacion diferencial tambien se puede escribir de la siguiente
manera:
y′′(t)− 7y′(t) + 6y(t) = et + δ(t− 2) + δ(t− 4), y(0) = 0, y′(0) = 0
Aplicando L en cada miembro de la ecuacion diferencial:
L d2
dt2y(t)− 7
d
dty(t) + 6y(t) = Let + δ(t− 2) + δ(t− 4)
aplicando propiedades de L:
L d2
dt2y(t) − 7L d
dty(t)+ L6y(t) = Let+ Lδ(t− 2)+ Lδ(t− 4)
s2Y (s) − sy(0) − d
dty(0) − 7 [sY (s)− y(0)] + 6Y (s) =
1
s− 1+ e−2s + e−4s,
luego
s2Y (s)− 7sY (s) + 6Y (s) =1
s− 1+ e−2s + e−4s, factorizando Y (s):
Y (s) [(s− 6)(s− 1)] =1
s− 1+ e−2s + e−4s, despejando Y (s):
Y (s)=1
(s− 6)(s− 1)2+
e−2s
(s− 6)(s− 1)+
e−4s
(s− 6)(s− 1)
Y (s) =1
25(s− 6)− 1
5(s− 1)2− 1
25(s− 1)+
+e−2s
5
[1
s− 6− 1
s− 1
]
+e−4s
5
[1
s− 6− 1
s− 1
]
, luego:

2.6. TRANSFORMADA DE LAPLACE DE LACONVOLUCION 45
y(t) =1
25e6t − 1
25et − 1
5tet +
1
5e6(t−2)µ(t− 2)− 1
5e(t−2)µ(t− 2)+
1
5e6(t−4)µ(t− 4)− 1
5e(t−4)µ(t− 4)
Ejemplo 2.40. Use la transformada de Laplace para solucionar la ecuacion
integral siguiente:
f(t) = 2t− 4t∫
0
sin τf(t− τ)dτ
Ntese que la integral que aparece en la ecuacion es la convolucion de las
funciones sin t con f(t). Luego calculando la transformada de Laplace en
cada miembro de la ecuacion tenemos:
F (s) =2
s2− 4
1
s2 + 1F (s), es decir:
F (s) +4
s2 + 1F (s) =
2
s2, factorizando F (s) tenemos:
F (s)
[
1 +4
s2 + 1
]
=2
s2, entonces:
F (s)
[s2 + 5
s2 + 1
]
=2
s2, despejando F (s):
F (s) =2(s2 + 1)
s2(s2 + 5)=
A
s+
B
s2+
Cs+D
s2 + 5, el desarrollo de las anteriores
fracciones parciales da como resultado:
F (s) =2
5
[1
s2+
4
s2 + 5
]
, calculando la transformada inversa de Laplace, se
tiene:
f(t) =2t
5+
8√5
25sin√5 t
Ejercicios 2.41. Use la transformada de Laplace para resolver cada una de
las ecuaciones diferenciales, integrales o integro-diferenciales sujetas a las
condiciones iniciales que se indican:
1)d2
dt2y(t) + y(t) = δ(t− 2π), y(0) = 0, y′(0) = 1
2)d2
dt2y(t) + y(t) = δ(t− π
2) + δ(t− 3π
2), y(0) = 0, y′(0) = 0
3)d2y(t)
dt2+ 2
d
dty(t) = 1 + δ(t− 2), y(0) = 0, y′(0) = 1
4)d2
dt2y(t) + y(t) = δ(t− 2π) + δ(t− 4π), y(0) = 0, y′(0) = 1

46 CAPITULO 2. TRANSFORMADA DE LAPLACE
5)d2y(t)
dt2+ 2
dy(t)
dt+ y(t) = δ(t− 1), y(0) = 0, y′(0) = 1
6)d2y(t)
dt2+ 4
dy(t)
dt+ 13y(t) = δ(t− π) + δ(t− 3π), y(0) = 0, y′(0) = 1
7)d2y(t)
dt2+ 2
dy(t)
dt+ 2y(t) = cos tδ(t− 3π), y(0) = 1, y′(0) = 1
8) f(t) +
∫ t
0(t− τ)f(τ)dτ = t
9) f(t) + 2
∫ t
0f(τ) cos(t− τ)dτ = 4e−t + sin t
10)dy(t)
dt= 1− sin t−
∫ t
0y(τ)dτ, y(0) = 0
11)dy(t)
dt+ 6y(t) + 9
∫ t
0y(τ)dτ = 1, y(0) = 0
12)dy(t)
dt= cos t+
∫ t
0y(τ) cos(t− τ)dτ, y(0) = 0
13)Un circuito LRC en serie contiene un inductor, una resistencia y un capa-
citor para los cuales L= 12H, R=10Ω y C=0.01F respectivamente. Al circuito
se le aplica un voltaje E(t), dado por:
E(t) =
10, si 0 ≤ t < 5
0, si t ≥ 5determine la carga instantanea q(t) del capacitor
para t > 0, si q(0) = 0 y q′(0) = 0, recuerde que:
Ld2q(t)
dt2+R
d
dtq(t) +
1
Cq(t) = E(t)
Encuentre la transformada inversa de Laplace de las siguientes funciones,
usando convolucion:
14) F (s) =1
(s− 5)(s+ 4)
15) F (s) =s
(s2 + 25)2
16) F (s) =1
(s2 + 16)2
17) F (s) =1
(s+ 9)2
18) F (s) =1
s (s− 6)

2.7. T. DE LAPLACE DE UNA FUNCION PERIODICA 47
2.7. T. de Laplace de una funcion periodica
Recuerde que una funcion f es periodica si existe un numero real positivo
“a” tal que f(t + a) = f(t) y el menor numero real que satisface dicha
ecuacion se llama periodo fundamental de f o simplemente periodo de f .
Ejemplo 2.42. f(t) = sin t
Ejemplo 2.43. f(x) = x− [|x|], donde [|x|] es la parte entera de x
Ejemplo 2.44.
f(x) = x, x es la distancia de x al entero mas proximo.
Ahora, si g es cualquier funcion, se define la funcion f(t), ası:
f(t) =
g(t), si t ∈ [0, p)
f(t+ p) si t /∈ [0, p)
Si f es una funcion continua parte por parte de orden exponencial y periodica
de periodo p, entonces:
Lf(t)= 1
1− e−sp
p∫
0
e−stf(t)dt, en efecto:
Lf(t)=∞∫
0
f(t)e−stdt =p∫
0
f(t)e−stdt+∞∫
pf(t)e−stdt
Si en la segunda integral se hace u = t− p, entonces du = dt, y:
Lf(t)=p∫
0
f(t)e−stdt+∞∫
0
f(u+ p)e−s(u+p)du
=p∫
0
f(t)e−stdt+e−sp∞∫
0
f(u)e−sudu =p∫
0
f(t)e−stdt+e−spLf(t), luego
Lf(t)[1− e−sp]=p∫
0
f(t)e−stdt, es decir:
Lf(t)= 1
1− e−sp
p∫
0
f(t)e−stdt

48 CAPITULO 2. TRANSFORMADA DE LAPLACE
Ejemplo 2.45. Encuentre la transformada de Laplace de la funcion:
f(t) =
t2, si t ∈ [0, 2)
f(t+ 2) si t /∈ [0, 2)
Lf(t)= 1
1− e−2s
2∫
0
t2e−stdt
=1
1− e−2s
[
−t2sest− 2t
s2est− 2
s3est
∣∣∣∣
2
0
]
=−1
1− e−2s
[
4
se2s+
4
s2e2s+
2
s3e2s− 2
s3
]
Ejemplo 2.46. Encuentre la transformada de Laplace, si:
f(t) =
sin t, si t ∈ [0, 2π)
f(t+ 2π) si t /∈ [0, 2π)entonces
Lf(t)= 1
1− e−2πs
2π∫
0
sin te−stdt =1
1− e−2πs
[
e−st
s2 + 1[−s sin t− cos t]
∣∣∣∣
2π
0
]
=1
1− e−2πs
[
e−2πs
s2 + 1
[
−s0 − 1
]
−[
1
s2 + 1
(−1)]]
=1
1− e−2πs
[
−e−2πs + 1
s2 + 1
]
=1
s2 + 1
Ejemplo 2.47. Para la funcion f dada por:
f(t) =
1, si 0 ≤ t < a
0 si a ≤ t < 2a
f(t+ 2a) si t /∈ [0, 2a)
cuya grafica es:
t
Figura 59.
1
4a3a2aa
2.7. T. DE LAPLACE DE UNA FUNCION PERIODICA 49
se tiene lo siguiente:
Lf(t)= 1
1− e−2as
2a∫
0
f(t)e−stdt =1
1− e−2as
a∫
0
e−stdt
=1
1− e−2as
[
−1sest
∣∣∣∣
a
0
]
=1
1− e−2as
[
−1sesa
+1
s
]
=1
s(1 + e−as)
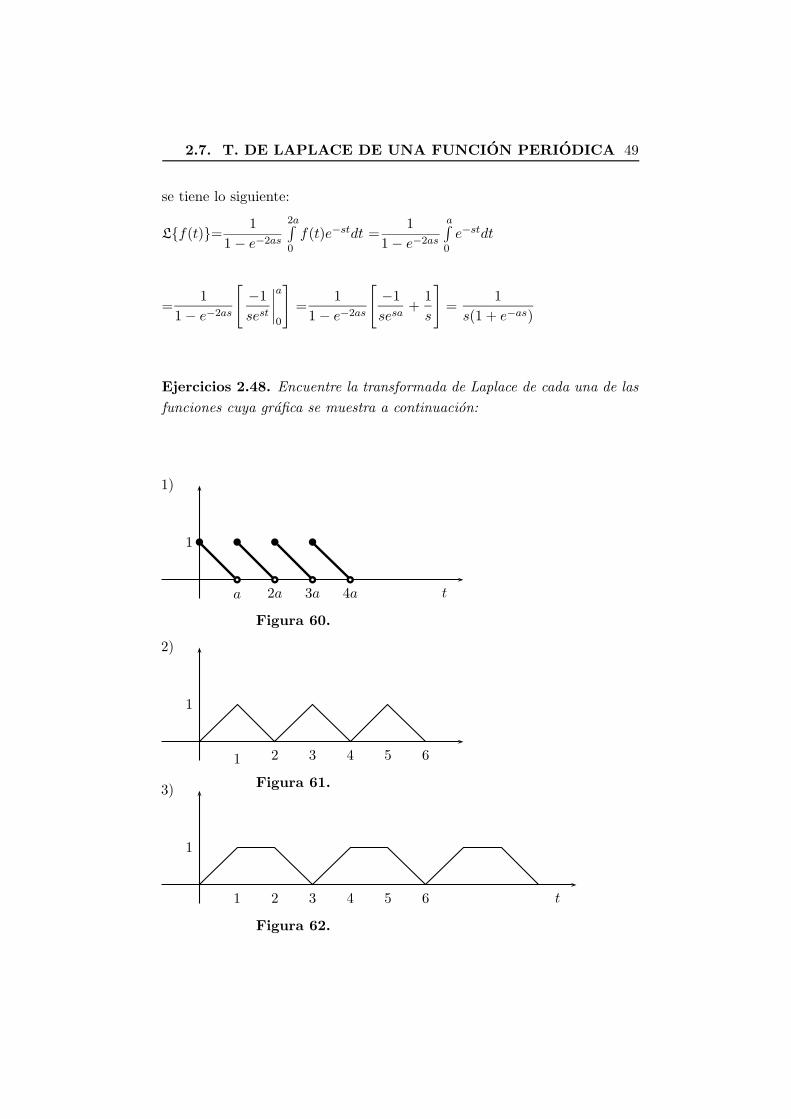
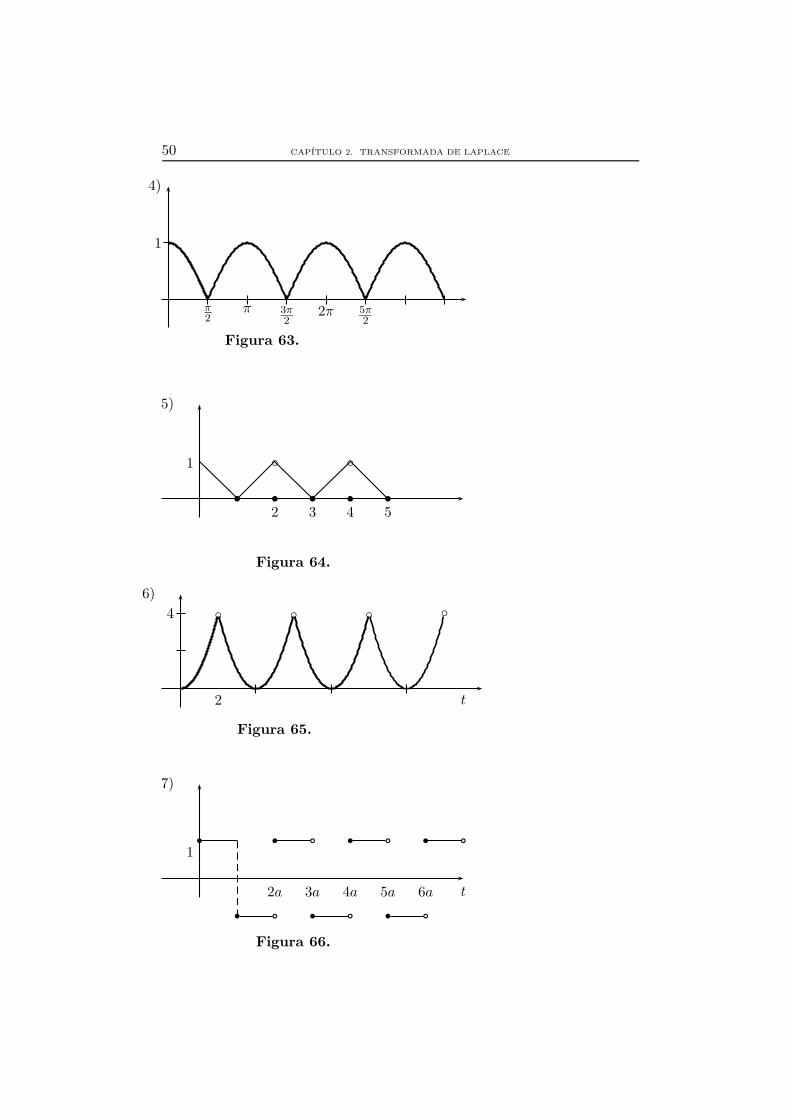
Ejercicios 2.48. Encuentre la transformada de Laplace de cada una de las
funciones cuya grafica se muestra a continuacion:
1)
t
Figura 60.
1
4a3a2aa
2)
1
Figura 61.
654321
3)
t
Figura 62.
1
654321
50 CAPITULO 2. TRANSFORMADA DE LAPLACE
Figura 63.
4)
1
π2
π 3π2
2π 5π2
Figura 64.
1
5
5)
432• • • • •
Figura 65.
6)
4
2 t
t
Figura 66.
1
7)
6a5a4a3a2a
Capıtulo 3
ECUACIONES
DIFERENCIALES
3.1. Introduccion
Una ecuacion diferencial es una ecuacion en la que existe una funcion o
relacion y al menos una derivada de tal funcion o relacion. Las ecuaciones
diferenciales se presentan en una gran variedad de situaciones como:
1) Se quiere determinar la posicion de una partıcula movil conociendo su
velocidad o su aceleracion.
2) Dada una sustancia radioactiva que se desintegra con coeficiente de va-
riacion conocido, se trata de averiguar la cantidad de sustancia remanente
despues de un tiempo.
3) Encontrar la carga q(t) de un circuito en serie que contiene un capacitor,
un inductor y una resistencia usando la segunda ley de kirchhoff (la suma
de las caıdas de voltaje a traves de cada uno de los componentes del circuito
es igual a la tension aplicada)
4) Hallar el precio de la U.V.R en cualquier dıa del ano conociendo la coti-
zacion en un dıa cualquiera y sabiendo que la U.V.R se puede tratar como
un problema de interes compuesto y capitalizable continuamente.
Las ecuaciones diferenciales se clasifican en ordinarias cuando en la ecuacion
la incognita es una funcion de una sola variable por ejemplo: f ′(x) = f(x)
51

52 CAPITULO 3. ECUACIONES DIFERENCIALES
y de derivadas parciales o simplemente parciales cuando la incognita es una
funcion de dos o mas variables, por ejemplo:
∂2f(x, y)
∂x2+∂2f(x, y)
∂y2= 0
En estas notas solo se trabajara con ecuaciones diferenciales ordinarias. Se
acostumbrara en una funcion a escribir y, en vez de f(x), ası la ecuacion
f ′(x) = f(x) se puede escribir y′ = y, tambien las derivadas segundas,
terceras. Se entiende por orden de una ecuacion diferencial, el de la derivada
de mayor orden que se encuentra en la ecuacion y cuyo coeficiente es distinto
de cero; ası la ecuacion diferencial:
y(6) + 3y(5) − 7y(4) − 3y(3) + 2y(2) + y = ex
es una ecuacion de orden seis. La ecuacion y′ = x3y(2) es una ecuacion de
segundo orden.
3.2. Estudio cualitativo
En muchas ocasiones es imposible obtener la solucion explıcita de una ecuacion
diferencial, sin embargo podemos obtener caracterısticas especiales de las
soluciones y de esta forma nos podemos hacer una idea de como pueden ser
las soluciones.
Del calculo diferencial sabemos que toda funcion f derivable en un punto
x0 se puede aproximar mediante una recta y = mx+ b , esta aproximacion
es una muy buena representacion de la funcion f en un intervalo de la forma
(x0−δ, x0+δ), δ > 0 es decir f(x) ≡ mx +b para x ∈ (x0−δ, x0 +δ)
donde m = f ′(x0). La siguiente grafica ilustra la situacion:
y = mx+ b
y = f(x)
xo
Figura 67.

3.2. ESTUDIO CUALITATIVO 53
Tambien sabemos que si una funcion f esta definida por f(x) = x + c
entonces f ′(x) = 1 y si f(x) = −x+ c, f ′(x) = −1. De esta forma po-
drıamos decir que si la derivada de una funcion f en un punto (x0, f(x0))
es 1, es decir f ′(x) = 1 quiere decir que la recta tangente, forma un angulo
de 450( π
4
)
con el eje horizontal, si la derivada f ′(x0) = −1 la recta tan-
gente a y = f(x) en el punto (x0, f(x0)) forma un angulo de 1350(
3π
4
)
;
si f ′(x) = 0 la recta tangente es horizontal, y si lımx→x0
|f ′(x)| = +∞ la recta
tangente es vertical. Estas consideraciones que acabamos de hacer son de
mucha utilidad para construir una aproximacion puntual de la solucion de
una ecuacion diferencial de la formady
dx= f(x, y).
Esta aproximacion se llama Campo de Pendientes o Campo de Tan-
gentes o Campo de Direcciones.
El campo de tangentes de una ecuacion diferencialdy
dx= f(x, y) se cons-
truye de la siguiente forma. Se considera un rectangulo [a, b] × [c, d] en el
que este define la relacion f(x, y), se toma un punto (x0, y0) de dicho
rectangulo es decir xo ∈ [a, b] y yo ∈ [c, d] luego se calcula f(x0, y0), de
esta forma se obtienedy
dx= f(x0, y0) es decir se encuentra la pendiente de
la recta tangente a F (x, y) = c en el punto (x0, y0), esta recta, como ya
se dijo, es una aproximacion de la relacion (funcion) F (x, y) = c que es la
solucion de la ecuacion diferencialdy
dx= f(x, y).
Ejemplo 3.1. Encontrar el campo de tangentes para cada una de las ecua-
ciones diferenciales dadas en el rectangulo indicado en cada caso
1)dy
dx=y
x[−2, 2]× [−2, 2]
en el punto (1, 1) se tiene quedy
dx=
1
1= 1; es decir que la pendiente
de la recta que aproxima a la relacion (funcion) F (x, y) = c forma un
angulo de 450( π
4
)
con cualquier horizontal. En el punto (1, 2) se tiene
quedy
dx=
2
1= 2, luego la inclinacion de la recta tangente en este punto
es mayor que la anterior. En el punto (−1, 1), dy
dx=
1
−1 = −1 es decir
que la recta tangente a F (x, y) = c en dicho punto forma un angulo de

54 CAPITULO 3. ECUACIONES DIFERENCIALES
1350 con el eje horizontal. En el punto (−1, 2), dy
dx=
2
−1 = −2 es decir
que el angulo de inclinacion de la recta tangente tiene un angulo menor de
1350(3π
4
)
pero obviamente mayor que 900(π
2
)
.
Continuando de esta forma en cada punto de coordenadas enteras (por ejem-
plo) se puede construir el siguiente campo de tangentes
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
y ’ = y/x
Figura 68.
Con un poco de esfuerzo se logra visualizar que las soluciones son rectas que
pasan por el origen del sistema de coordenadas.
Ejemplo 3.2.dy
dx= x2y, [−2, 2]× [−2, 2]
En el punto (0, 1) se tiene quedy
dx= 0 es decir la recta tangente a la
solucion F (x, y) = c es horizontal. En el punto (1, 2),dy
dx= 2 es decir
la recta tangente tiene mayor inclinacion que la recta y = x.
En el punto (−1, 2),dy
dx= (−1)2 × 2 = 2, es decir que la inclinacion de
la recta tangente al punto inmediatamente anterior. Continuando con este
proceso se logra construir el siguiente campo de tangentes:
3.2. ESTUDIO CUALITATIVO 55
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
y ’ = x2 y
Figura 69.
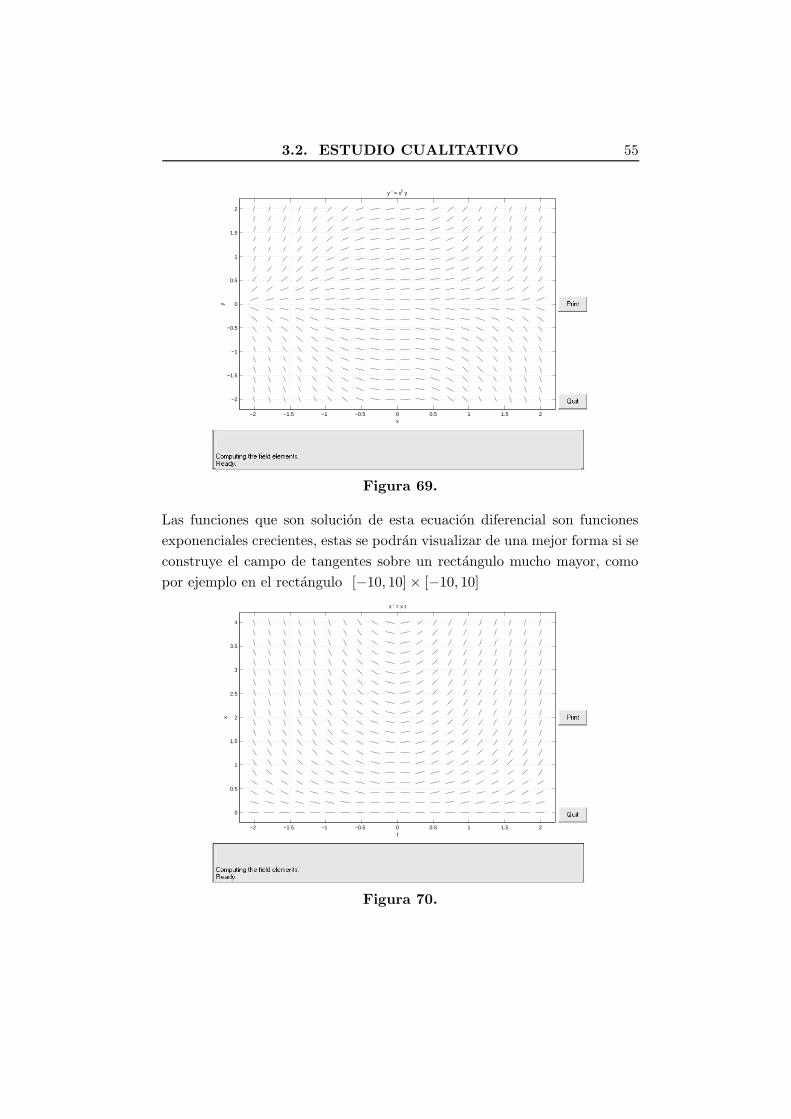
Las funciones que son solucion de esta ecuacion diferencial son funciones
exponenciales crecientes, estas se podran visualizar de una mejor forma si se
construye el campo de tangentes sobre un rectangulo mucho mayor, como
por ejemplo en el rectangulo [−10, 10]× [−10, 10]
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
0
0.5
1
1.5
2
2.5
3
3.5
4
t
x
x ’ = x t
Figura 70.

56 CAPITULO 3. ECUACIONES DIFERENCIALES
La anterior grafica es un ejemplo del campo de pendientes de la ecuacion
diferencial x′ = x.t, generada por Matlab (igual que las dos graficas anterio-
res a esta, con la instruccion: dfield6, luego enter y en la ventana que aparece
se escogen los intervalos para las variables y se da la orden de procesar) en
el cual t ∈ [−2, 2] mientras que x ∈ [0, 4]:
Ejercicios 3.3. Construye el campo de pendientes para cada una de las
siguientes ecuaciones diferenciales
1)dy
dx= x2 + y 3)
dy
dx= xy 5)
dy
dx=√xy
2)dy
dx=x
y4)
dy
dx= x√y 6)
dy
dx= xy2
Definicion 3.4. Una ecuacion diferencialdy
dx= f(x, y) se llama autonoma
si f(x, y) no depende de x, es decir si f(x, y) ≡ f(y)
Ejemplo 3.5.
1)dy
dx= 1− y2 2)
dy
dx= (1− y)3 3)
dy
dx= lnx
Estos modelos de ecuaciones aparecen con alguna frecuencia en la fısica, la
definicion que allı se les da es la que una ecuacion diferencial es autonoma
si no depende de el tiempo. Son ejemplos de ecuaciones autonomas la ley
del enfriamiento de Newton, el crecimiento de una poblacion, la mezcla de
soluciones salinas, como se vera mas adelante.
Definicion 3.6. Sidy
dx= f(x, y) es una ecuacion autonoma, es decir
si f(x, y) ≡ f(y), entonces decimos que un numero real “c ”es un punto
critico de dicha ecuacion y f(c) = 0. A los puntos crıticos tambien se les
llama puntos de equilibrio o puntos estacionarios.
Observemos que si c es un cero de f(y) en la ecuacion autonomady
dx=
f(y) entonces y = c es una solucion constante de la ecuacion autonoma.
Esta solucion se conoce como solucion de equilibro.

3.2. ESTUDIO CUALITATIVO 57
Ejemplo 3.7. Encuentre los puntos crıticos de cada ecuacion diferencial
estable
1.dy
dx= (1− y)3 aquı f(y) = (1− y)3, luego f(y) = 0 ⇔ (1− y)3 =
0 ⇔ 1− y = 0 ⇔ y = 1
2.dy
dx= 1− y4
f(y) = 1− y4 entonces f(y) = 0 ⇔ 1− y4 = 0 ⇔ (1− y2)(1 + y2) =
0 ⇔ (1 − y)(1 + y)(1 + y2) = 0 ⇔ y = 1 y y = −1 son los puntos
crıticos.
En una ecuacion diferencial autonomady
dx= f(y) los puntos crıticos son de
especial importancia, ya que estos nos permiten hacer un analisis de como
puede ser el comportamiento de las soluciones generales y las particulares.
Ası por ejemplo en la ecuacion autonomady
dx= 1−y2 se tienen dos puntos
crıticos: y = 1 y y = −1. Si ubicamos estos dos puntos en una recta
numerica obtenemos tres intervalos: (−∞,−1), (−1, 1) y (1,∞). Se sabe
que cualquier solucion es decreciente en (−∞,−1), pues 1− y2 es menor
que cero en ese intervalo, creciente en (−1, 1) y decreciente en (1,∞).
Esta situacion la podemos graficar (retrato de fase) dibujando una flecha
hacia arriba en el intervalo donde es creciente y una flecha hacia abajo en
el intervalo donde es decreciente.
−1
1 Creciente: flecha hacia arriba
Decreciente: flecha hacia abajo
Figura 71.

58 CAPITULO 3. ECUACIONES DIFERENCIALES
3.2.1. Puntos Atractores y Repulsores
Hay tres clases de comportamiento de una solucion de la ecuacion diferencialdy
dx= f(y) cerca de un punto critico “c”, a saber:
1. Cuando las puntas de las flechas en ambos lados de “c” apuntan hacia
c, es decir leyendo de abajo hacia arriba creciente-decreciente, como
en el caso y = 1 del ejemplo anterior, en este caso el punto se llama
asintoticamente estable y c se llama punto atractor.
2. Cuando las puntas de las flechas apuntan alejandose de “c”decreciente-
creciente, en este caso se dice que c es un punto inestable y a “c”se le
llama punto repulsor, como en el caso y = −1 del ejemplo anterior.
3. Cuando las puntas de las flechas apuntan una alejandose de “c” y
la otra acercandose a “c” creciente-creciente o decreciente-decreciente.
En este caso no es ni atractor ni repulsor, se dice que “c”es semiestable.
Ejercicios 3.8. En los siguientes ejercicios encuentre los puntos crıticos,
construya el retrato fase de la ecuacion diferencial y clasifique los puntos
crıticos en atractores, repulsores o semiestables.
1.dy
dx= y3 − y2
2.dy
dx= 2y2 − 3y
3.dy
dx= (y − 1)3
4.dy
dx= y2 − 3y + 2
5.dy
dx= y4 − 16
6.dy
dx= 2y(y − 1)(y + 3)
7.dy
dx= 4y − y3
8.dy
dx= (y − 3)2

3.3. ESTUDIO ANALITICO 59
3.3. Estudio Analıtico
Inicialmente se consideran ecuaciones diferenciales de primer orden aquellas
en las que se puede despejar y′, es decir, ecuaciones en las que se puede
escribir y′ = f(x, y); uno de los casos particulares de dicha ecuacion es el
caso en que f(x, y) no depende de y, es decir que:
y′ = g(x) (3.1)
en donde g es una funcion conocida. Resolver la ecuacion 3.1 equivale a en-
contrar una primitiva G(x); ademas, los casos que interesan seran aquellos
donde G(x) es continua en algun intervalo I. Se sabe que la integral indefini-
da de g es una primitiva y que cada primitiva se puede obtener de una ya
encontrada sumandole una constante, por tanto, la ecuacion diferencial 3.1
tiene una infinidad de soluciones ası:
y =
∫
g(x) dx+ C
Ahora, si queremos una solucion particular, es decir, si necesitamos una
funcion “y”que pase por algun punto particular, digamos (a, b), se reemplaza
la x por a, la y por b y se despeja C, como por ejemplo:
Ejemplo 3.9. Si y′ = 3x2. ¿Cual es la funcion f que satisface dicha
ecuacion?. Ademas f(0) = 3.
Integrando respecto a x se obtiene: y = x3 + C, reemplazando x por 0, y, y
por 3 se concluye que C = 3. Luego la funcion requerida es y = x3 + 3.
En algunos casos la constante C no se presenta en la solucion en forma
aditiva sino en forma multiplicativa debido a equivalencias que se pueden
aplicar ası:
Ejemplo 3.10. Si, y′ = y entonces, ln y = x+ C1, es decir y = Cex
Ejercicios 3.11. I) Encuentre la solucion general de cada una de las ecua-
ciones diferenciales dadas y despues encuentre una solucion particular que
satisfaga las condiciones dadas:
1) y′ = x3 + 1, y(1) = 4

60 CAPITULO 3. ECUACIONES DIFERENCIALES
2) y′ = x−2 + 2x, y(1) = 5
3) y′ = (2x+ 1)4, y(0) = 6
4)dy
dx= 3x2 + 4x− 1, y(2) = 5
5) y′ = x
x+ 1, y(1) = 2
II) Comprobar que las ecuaciones diferenciales tienen las soluciones dadas:
1) y′′ = 4y,
y = 5e2x + 7e−2x
y = 4e2x − 3e−2x
2) xyy′ = (x+ 1)(y + 1),
x(y + 1) = 2ey−x
x(y + 1) = 5ey−x
3)dy
dx=
√y
x; y = (
√x+ C)2, x > 0
4) y′ − 1
xy = 1; y = x lnx, x > 0
5) y′′+ y′ − 12y = 0; y = C1e3x + C2e
−4x
6) y′′+(dy
dx
)2
= 0; y = ln (x+ C1) + C2
7) x2d2y
dx2− x
dy
dx+ 2y = 0; y = x cos lnx, x > 0
8) y′′′ − y′′+ 9y′ − 9y = 0; y = C1 sin 3x+ C2 cos 3x+ 4ex
9) y′′+ y = − tanx; y = cosx ln(secx+ tanx)
10)
(dy
dx
)3
+ xdy
dx= y; y = x+ 1
11)dt
dx=
1
(2− x)(1− x); t = ln
2− x
1− x
12) y′+ 2xy = 1; y = e−x2∫ x
0et
2
dt+ C1e−x2

3.4. VARIABLES SEPARABLES 61
13) y′+ y = sinx; y =1
2sinx− 1
2cosx+ 10e−x
14)dy
dx=y − x
y + x; ln(x2 + y2) + 2 tan−1 y
x= C
15)dy
dx=y
x+x
y;
(y
x
)2
= 2 ln |x|+ C
16)
[
y + x coty
x
]
− xdy
dx= 0; x cos
y
x= C
3.4. Variables separables
Una ecuacion diferencial y′ = f(x, y) en la que f(x, y) se puede escribir como
el producto de una funcion que depende de x : Q(x) con otra funcion que
depende de y : R(y) es decir y′ = Q(x)R(y) se llama de variables separables
en donde tanto R(y) como Q(x) son funciones conocidas y ademas contınuas
en todos los puntos de su dominio. Ahora, si R(y) no es identicamente cero
se puede dividir por R(y) para obtener:
1
R(y)y′ = Q(x). Si hacemos
1
R(y)= A(y), se obtiene :
A(y)y′ = Q(x). Si suponemos que y = Y (x) entonces A(Y )Y ′(x) = Q(x).
Integrando respecto a x se obtiene:
∫
A(Y )Y ′(x)dx =
∫
Q(x)dx+ C, pero
Y ′(x)dx = dy, entonces,
∫
A(Y )dy =
∫
Q(x)dx+ C
Ejemplo 3.12.
y′ = x3y−2, entonces y2y′ = x3,⇒∫
y2y′dx =
∫
x3dx+ C,⇒∫
y2dy =
∫
x3dx+ C, luegoy3
3=x4
4+ C
Ejemplo 3.13.
yy′ = ex+2y sinx,⇒ yy′ = ex sinx e2y ⇒

62 CAPITULO 3. ECUACIONES DIFERENCIALES
ye−2yy′ = ex sinx,⇒∫
ye−2y y′ dx =
∫
ex sinx dx+ C,⇒∫
ye−2y dy =
∫
ex sinx dx+ C, luego
−y2e−2y − e−2y
4=ex
2
[
sinx− cosx
]
+ C
Ejemplo 3.14.
xdx+ ydy = xy(xdy − ydx),⇒ xdx+ ydy = x2ydy − xy2dx,⇒xdx+ xy2dx = x2ydy − ydy,⇒ (x+ xy2)dx =
(x2y − y)dy, como dy = ydx⇒ (x+ xy2)dx =
(x2y − y)y′ dx⇒ (1 + y2)x dx = (x2 − 1)yy′ dx⇒x
x2 − 1dx =
y
1 + y2y′ dx, integrando :
∫x
x2 − 1dx =
∫y
1 + y2y′ dx⇒
∫x
x2 − 1dx =
∫y
1 + y2dy, luego
1
2ln(x2 − 1) + lnC1 =
1
2ln(1 + y2), es decir 1 + y2 = C(x2 − 1)
Ejercicios 3.15. Resuelva por el metodo de separacion de variables las
siguientes ecuaciones diferenciales:
1) y′ = x4y−3 2) tanx cos y = −y′ tan y3)√
1− x2y′+ 1 + y2 = 0 4) xy(1 + x2) y′ − (1 + y2) = 0
5) (x+ 1)y′+ y2 = 0 6) xyy′ = 1 + x2 + y2 + x2y2
7) (x− 1) y′ = xy 8) (x+ 1)dy
dx= x
9)dx
dy=
x2y2
1 + x10) exy
dy
dx= e−y + e−2x−y
11) x3y3dy = (y + 1)dx 12) 2dy
dx− 1
y=
2x
y
13)dy
dx=xy + 2y − x− 2
xy − 3y + x− 314) x
√
1− y2 dx = dy

3.5. HOMOGENEAS 63
Resuelva las ecuaciones diferenciales dadas sujetas a las condiciones iniciales
que se indican:
15) sinx(e−y+1) dx = (1 + cosx) dy, y(0) = 0
16)dy
dt+ ty = y, y(1) = 3
17)dx
dy= 4(x2 + 1), x(
π
4) = 1
3.5. Homogeneas
Se dice que una funcion f(x, y) es homogenea de grado r si f(tx, ty) =
trf(x, y) para algun numero real r.
Ejemplo 3.16.
f(x, y) = x2 + 3xy − y2, ⇒f(tx, ty) = (tx)2 + 3(tx)(ty)− (ty)2 = t2x2 + 3t2xy − t2y2
= t2(x2 + 3xy − y2) = t2f(x, y)
Ejemplo 3.17.
f(x, y) =x− y
x+ y⇒
f(tx, ty) =tx− ty
tx+ ty=t(x− y)
t(x+ y)=x− y
x+ y= t0f(x, y)
Ejemplo 3.18.
f(x, y) = 3√
x2 + y2 + 3√xy ⇒
f(tx, ty) = 3√
(tx)2 + (ty)2 + 3√
(tx)(ty) = 3√
t2x2 + t2y2 + 3√
(tx)(ty)⇒f(tx, ty) = 3
√
t2(x2 + y2) + 3√
t2xy
⇒ f(tx, ty) = t23
3√
x2 + y2 + t23 3√xy.
Una ecuacion diferencial de la forma:
M(x, y)dx+N(x, y)dy = 0, es homogenea, si las funcionesM(x, y) y N(x, y)
son homogeneas del mismo grado.

64 CAPITULO 3. ECUACIONES DIFERENCIALES
Teorema 3.19. Toda ecuacion diferencial de la forma M(x,y)dx+N(x,y)dy=0
donde M(x, y) y N(x, y) son funciones homogeneas del mismo grado es una
ecuacion diferencial de variables separables.
Prueba:
Si en la ecuacion diferencial de la forma M(x, y)dx + N(x, y)dy = 0
escribimos y = ux , entonces dy = udx+ xdu , luego
M(x, ux)dx+N(x, ux)(udx+ xdu) = 0
como las funciones M y N son homogeneas de grado n tenemos
xnM(1, u)dx+ xnN(1, u)(udx+ xdu) = 0, es decir
M(1, u)dx+N(1, u)(udx+ xdu) = 0, por lo tanto:
[M(1, u) +N(1, u)u]dx+N(1, u)xdu = 0, luego
− du
dx=M(1, u) +N(1, u)u
N(1, u)
1
x
Ejemplo 3.20. Resolver la ecuacion diferencial: (y2 + yx)dx+ x2dy = 0.
Si escribimos y = ux, ⇒ dy = udx+ xdu, la ecuacion dada se convierte en:
(u2x2 + ux2)dx+ x2(udx+ xdu) = 0⇒ x2(u2 + 2u)dx+ x3du = 0,⇒x2
x3dx =
−duu2 + 2u
, ⇒ dx
x=−u′ dxu(u+ 2)
, integrando con respecto a x:
∫dx
x= −
∫u′ dx
u(u+ 2), ⇒ lnx+ C = −
∫1
u(u+ 2)du,
integrando por fracciones parciales: lnx+ C = −1
2lnu+
1
2ln(u+ 2)
lnx+ C = ln
√
u+ 2
u= ln
√yx + 2
yx
= ln
√y + 2x
y
Ejemplo 3.21. Solucionar la ecuacion diferencial sujeta a las condiciones
iniciales indicadas:
ydx+ x[lnx− ln y − 1]dy = 0, y(e) = 1
Si se escribe y = ux,⇒ dy = udx+ xdu,⇒

3.5. HOMOGENEAS 65
uxdx+ x[lnx− lnux− 1][udx+ xdu] = 0,⇒uxdx+ x[− lnu− 1][udx+ xdu] = 0,⇒
− u lnu dx− [lnu+ 1]x du = 0
⇒ dx
x+
(lnu+ 1) du
u lnu= 0⇒
lnx+ lnu+ ln[lnu] + ln c = 0 ⇒ln[cxu lnu] = 0 ⇒ cxu lnu = 1, reemplazando u
cxy
xlny
x= 1, como y(e)=1 ⇒ c = −1
Ejercicios 3.22. Resuelva cada una de las ecuaciones diferenciales dadas
usando sustituciones adecuadas.
1) (x+ y)dx+ ydy = 0 2) (y2 + x2)dx+ x2dy = 0
3)d y
dx=y − x
y + x4)
d y
d x=x+ 3y
3x+ y
5) [x2e−yx + y2]dx = xydy 6) (x2 + xy + 3y2)dx− (x2 + 2xy)dy = 0
7)d y
d x=x2 + 2y2
xy8) x y′ = y −
√
x2 + y2
9) x2 y′ + xy + 2y2 = 0 10) y′ =y
x+ x sin
y
x
11) y′ =y[x2 + xy + y2]
x[x2 + 3xy + y2]
Resuelva la ecuacion diferencial dada, sujeta a la condicion que se indica:
12) (x2 + 2y2)dx = xydy; y(−1) = 1
13) xydx− x2dy = y√
x2 + y2 dy; y(0) = 1
14) ydx+ [y cosx
y− x] dy = 0; y(0) = 2
15) (√x+√y )2dx = xdy; y(1) = 0
16)dy
dx− y
x= cosh
y
x; y(1) = 0

66 CAPITULO 3. ECUACIONES DIFERENCIALES
3.6. Ecuaciones diferenciales exactas
Del calculo multivariado se sabe que si z = f(x, y) es una funcion de dos
variables diferenciable, la diferencial de la variable dependiente dz llamada
tambien diferencial total se define como:
dz = df =∂f
∂x(x, y) dx+
∂f
∂y(x, y) dy
Ejemplo 3.23. Si f(x, y) = x2y − xy3 + xy entonces,
df = (2xy − y3 + y) dx+ (x2 − 3xy2 + x) dy
Definicion 3.24. Una expresion diferencial M(x, y) dx + N(x, y) dy es
una diferencial exacta en una region R del plano xy si existe una funcion
z = f(x, y) de tal forma que df = M(x, y) dx+N(x, y) dy.
Una ecuacion diferencial de primer orden M(x, y) dx + N(x, y) dy = 0 es
una ecuacion diferencial exacta, si el lado izquierdo de la ecuacion es una
diferencial exacta.
Ejemplo 3.25.
1. 3x2y2 dx+ 2x3y dy = 0
2. cos(xy) y dx+ cos(xy)x dy = 0
Podrıamos decir que una ecuacion diferencial de primer orden de la forma
M(x, y)dx + N(x, y)dy = 0 es exacta si existe una funcion diferencial de
dos variables z = f(x, y) de tal forma que:
∂f(x, y)
∂x= M(x, y) y
∂f(x, y)
∂y= N(x, y)
Del calculo mutivariado se tiene el siguiente
Teorema 3.26. Si z = f(x, y) es una funcion de dos variables de tal
forma que
∂f
∂x,
∂f
∂y;
∂2f
∂x ∂y,
∂2f
∂y ∂x,

3.6. ECUACIONES DIFERENCIALES EXACTAS 67
existen y son continuas en un conjunto abierto S entonces se cumple que
∂2f
∂x ∂y=
∂2f
∂y ∂x
Luego podemos afirmar que una ecuacion diferencial de primer orden de la
forma M(x, y)dx+N(x, y)dy = 0 es una ecuacion exacta si
Teorema 3.27. Sean M(x, y), N(x, y) dos funciones de dos variables
continuas y con derivadas parciales continuas en un conjunto abierto S. En-
tonces, una condicion necesaria y suficiente para que M(x, y)dx+N(x, y)dy
sea una diferencial exacta es que
∂M
∂y=∂N
∂x
3.6.1. Metodo de solucion de una ecuacion exacta
Dada una ecuacion diferencial de primer orden M(x, y)dx+N(x, y)dy = 0
se determina si se cumple la ecuacion∂M
∂y=∂N
∂x(siempre que las derivadas
parciales tengan sentido) en caso afirmativo se tendrıa que existe una funcion
f(x, y) = c de tal forma que∂f
∂x= M(x, y), si integramos, respecto a x
se obtiene∫
∂f
∂xdx =
∫
M(x, y) dx, es decir
f(x, y) =
∫
M(x, y) dx+ g(y) (3.2)
donde g(y) es una funcion por determinar, que no depende de “x”. Ahora,
derivando la ecuacion (3.2) respecto a y se obtiene
∂f(x, y)
∂y=
∂
∂y
∫
M(x, y) dx+ g′(y)
como∂f
∂y= N(x, y), entonces
N(x, y) =∂f
∂y
∫
M(x, y) dx+ g′(x), es decir
N(x, y)− ∂
∂y
∫
M(x, y) dx = g′(y)

68 CAPITULO 3. ECUACIONES DIFERENCIALES
luego integrando la ultima ecuacion respecto a y se encuentra la funcion
g(y) y finalmente la solucion implıcita de la ecuacion diferencial exacta es:
f(x, y) = c
Es de anotar que la solucion tambien se encuentra si se parte del hecho
que∂f
∂y= N(x, y) y se integra respecto a “ y ”, para continuar con pasos
similares a los que se han propuesto.
Ejemplo 3.28. Resuelva la ecuacion diferencial
(2x+ y) dx+ (x+ 6y) dy = 0
Aquı M(x, y) = 2x+ y y N(x, y) = x+ 6y
entonces,∂M
∂y= 1 y
∂N
∂x= 1, luego
∂M
∂y=∂N
∂x
Si,∂f
∂x= 2x+ y, entonces
∫∂f
∂xdx =
∫
(2x+ y) dx+ g(y)
f(x, y) = x2 + xy + g(y)
derivando respecto a y se obtiene∂f
∂y= x+ g′(y)
como∂f
∂y= N(x, y), entonces N(x, y) = x+ g′(y) es decir
N(x, y)− x = g′(y)
x+ 6y − x = g′(y)
6y = g′(y)
integrando respecto a y se obtiene
g(y) = 3y2 + c
luego, la solucion general es:
x2 + xy + 3y2 = c

3.6. ECUACIONES DIFERENCIALES EXACTAS 69
Ejemplo 3.29. Resuelva la ecuacion diferencial
(3x2y + ey) dx+ (x3 + xey − 2y) dy = 0
Aquı M(x, y) = 3x2y + ey y N(x, y) = x3 + xey − 2y
entonces,∂M
∂y= 3x2 + ey y
∂N
∂x= 3x2 + ey, luego
∂M
∂y=∂N
∂x
Esto significa que la ecuacion original es exacta, luego existe una funcion
f(x, y) = c tal que∂f
∂y= N(x, y), es decir
∂f
∂y= x3 + xey − 2y
integrando respecto a y se obtiene
f(x, y) =
∫
(x3 + xey − 2y) dy
f(x, y) = x3y + xey − y2 + h(x)
derivando respecto a x se obtiene
∂f
∂x= 3x2y + ey + h′(x)
como∂f
∂x= M(x, y), entonces
3x2y + ey = 3x2y + ey + h′(x) es decir
h′(x) = 0, luego h(x) = c
y ası la solucion es
x3y + xey − y2 = c
Ejemplo 3.30. Solucione la ecuacion diferencial con valor inicial:
(ex + y) dx+ (2 + x+ yey) dy = 0; y(0) = 1
Aquı M(x, y) = ex + y y N(x, y) = 2 + x+ yey
luego,∂M
∂y= 1 y
∂N
∂x= 1, es decir
∂M
∂y=∂N
∂x

70 CAPITULO 3. ECUACIONES DIFERENCIALES
luego existe una funcion f(x, y) tal que∂f
∂x= ex+ y; integrando respecto
a x se obtiene
f(x, y) = ex + xy + g(y)
derivando respecto a y se obtiene
∂f
∂y= x+ g′(y), luego
2 + x+ yey = x+ g′(y) es decir
g′(y) = 2 + yey,
integrando respecto a y se obtiene
g(y) = 2y + yey − ey, es decir
f(x, y) = ex + xy + 2y + yey − ey = c
si tenemos en cuenta que y(0) = 1, entonces
e0 + 0× 1 + 2 + e− e = c, es decir c = 3
luego la solucion particular, es
ex + xy + 2y + yey − ey = 3

3.6. ECUACIONES DIFERENCIALES EXACTAS 71
Ejercicios 3.31. Determine si cada una de las siguientes ecuaciones dife-
renciales es exacta, en caso afirmativo resuelvala.
1. y2 dx+ (2xy + 2) dy = 0
2. 2x ey2dx+ 2x2 y ey
2dy = 0
3. y sin(xy)dx+ x sin(xy) dy = 0
4. (2x+ y) dx+ (x− 2y) dy = 0
5. (2xy2 − 2) dx+ (2x2y + 2) dy = 0
6.2x dx
(x2 + y2)2+
2y dy
(x2 + y2)2= 0
7. (ey − yex) dx+ (xey − ex) dy = 0
8. xdy
dx= 2xex − y + 6x2
9. (2x− 2) dx+ (2y + 4) dy = 0
10. (1 + lnx+y
x) dx = (1− lnx) dy
Resolver cada una de las siguientes ecuaciones diferenciales con condi-
ciones iniciales:
11. [ln(x+ y) +x
x+ y] dx+
x dy
x+ y= 0; y(1) = 1
12. (y dx
x2 + 1) dx+ arctanx dy = 0; y(π/4) = 1
13. arcsin y dx+x dy
√
1− y2= 0; y(1) =
π
6
14. (2xy + y2) dx+ (x2 + 2xy) dy = 0; y(1) = 1
Encuentre el valor de la constante k para que la ecuacion diferencial
sea exacta y despues resuelva dicha ecuacion
15. (kx2y + 8xy2) dx+ (2x3 + 8x2y) dy = 0
16. (3y + kxy2) dx+ (3x− 4x2y) dy = 0

72 CAPITULO 3. ECUACIONES DIFERENCIALES
3.7. Lineales de primer orden
Una ecuacion diferencial lineal de primer orden es de la forma:
y′ + P (x)y = Q(x)
donde P (x) y Q(x) son funciones definidas y continuas en algun intervalo
I. Un caso particular es cuando Q(x) = 0 cuya solucion se encuentra por
separacion de variables. Ahora, si Q(x) 6= 0 nos damos cuenta que la parte
izquierda de la ecuacion en mencion es casi la derivada de un producto. Si
multiplicamos la ecuacion por e∫P (x)dx obtenemos:
y′e∫P (x)dx + P (x)ye
∫P (x)dx = Q(x)e
∫P (x)dx, que podemos escribir:
[
y e∫P (x)dx
]′= Q(x) e
∫P (x)dx
integrando respecto a x se obtiene:∫ [
ye∫P (x)dx
]′dx =
∫ [
Q(x)e∫P (x)dx
]
dx, luego
y e∫P (x)dx =
∫ [
Q(x)e∫P (x)dx
]
dx+ C,
como e∫P (x)dx 6= 0, despejando y se obtiene:
y = e−∫P (x)dx
[∫
Q(x)e∫P (x)dxdx+ C
]
Esta ultima ecuacion contiene todas las soluciones de la ecuacion inicial.
Ejemplo 3.32.
y′ + y tanx = sin 2x. Aquı P (x) = tanx; Q(x) = sin 2x, luego∫
P (x) dx =
∫
tanx dx = − ln cosx, ⇒
y = eln cosx[∫
sin 2x e− ln cosx dx+ C
]
= cosx
[∫sin 2x
cosxdx+ C
]
= cosx
[∫
2 sinx dx+ C
]
= cosx[2(− cosx) + C], luego y = −2 cos2 x+ C cosx

3.7. LINEALES DE PRIMER ORDEN 73
Ejemplo 3.33. Resolver la ecuacion diferencial:
x(x+ 1)y′ + y = x(x+ 1)2e−x2 dividiendo por x(x+ 1) se obtiene:
y′ +1
x(x+ 1)y =
x(x+ 1)2
x(x+ 1)e−x2 luego,
P (x) =1
x(x+ 1), Q(x) = (x+ 1)e−x2 , por lo tanto
∫
P (x) dx =
∫1
x(x+ 1)dx = ln
x
x+ 1, ⇒
y = e− ln xx+1
[∫
(x+ 1)e−x2elnx
x+1 dx+ C
]
y =x+ 1
x
[∫
x(x+ 1)e−x2
x+ 1dx+ C
]
=x+ 1
x
[∫
xe−x2 dx+ C
]
, luego
y =x+ 1
x
[
−1
2e−x2 + C
]
Ejemplo 3.34. Probar que existe una funcion y solo una continua en el eje
real positivo tal que: f(x) = 1 +1
x
x∫
1
f(t) dt para todo x > 0. Hallar esta
funcion
Supongamos que existe f continua para todo x > 0 que cumple la ecuacion
f(x) = 1 +1
x
x∫
1
f(t) dt. Notese que f(1) = 1. Ahora, sea y =x∫
1
f(t)dt ⇒
y′ = f(x) luego la ecuacion f(x) se puede escribir ası:
y′ = 1 +1
xy ⇒ y′ − 1
xy = 1
Esta ultima es una ecuacion lineal de primer grado donde:
P (x) = − 1
xy Q(x) = 1. ⇒
∫P (x) dx = − lnx, x > 0, luego y = elnx
[∫e− lnx dx+ C
], ⇒
y = x(lnx+C), x > 0,⇒ y = x lnx+Cx, es decir∫ x1 f(t) dt = x lnx+Cx,
derivando se obtiene:
f(x) = lnx + 1 + C. Como f(1) = 1 se concluye que: f(x) = lnx + 1, la
cual satisface las condiciones del ejercicio.

74 CAPITULO 3. ECUACIONES DIFERENCIALES
Ejercicios 3.35. Resolver cada una de las siguientes ecuaciones diferen-
ciales:
1) y′ − 3y = e2x 2) y′ sinx+ y cosx = 1
3) xy′ − y = x2 sinx 4) xy′ − 2y = x5
5) (x− 2)(x− 3)y′ + 2y = (x− 1)(x− 2) 6) (x+ 1)y′ + y = x2 − 1
7) (1− x2)y′ + xy = ax, |x| < 1 8) y′ + y tanx = secx
9)dy
dx+y
x= xex 10) y′ − ay = f(x)
11)dy
dx+y
x=
1
x12) (x+ 1)y′ + 2y = (x+ 1)3
Resolver cada una de las ecuaciones diferenciales con condiciones iniciales:
13)dy
dx− y
x= 3x3; y(1) = 3
14) y′ = e2x − 3y; y(0) = 1
15) xy′ + (1 + x)y = e−x; y(1) = 0
16) y′ sinx+ 2y cosx = sin 2x; y(π
6) = 2
Existen algunas ecuaciones diferenciales que inicialmente no son lineales de
primer orden pero que haciendo un cambio adecuado de variable se logra
convertir en una ecuacion lineal de primer orden. Es el caso de la llamada
ecuacion de Bernoulli que tiene la forma:
y′ + P (x)y = Q(x)yn, n 6= 1
Si dividimos dicha ecuacion por yn se obtiene1
yny′ +
1
yn−1P (x) = Q(x).
Si hacemos v = y1−n,⇒ v′ = (1− n) y−n y′,
reemplazando se obtiene:1
1− nv′ + P (x)v = Q(x),
multiplicando por 1− n, se obtiene:
v′ + (1− n)P (x)v = (1− n)Q(x)
Ejemplo 3.36. Solucionar la ecuacion diferencial:
y′ − 4y = 2exy1/2

3.7. LINEALES DE PRIMER ORDEN 75
Aquı, n = 1/2, y v = y1/2
v′ − 2v = ex, P (x) = −2, Q(x) = ex, luego
v = e2x[∫
exe−2xdx+ C]= e2x
[∫e−xdx+ C
]
v = e2x(−e−x + C) = Ce2x − ex, como v = y1/2, ⇒y = (Ce2x − ex)2
Ejemplo 3.37. Resolver la ecuacion diferencial:
xy′ + y = y2x2 lnx
Si dividimos por x, x 6= 0, se obtiene:
y′ +1
xy = y2x lnx
Aquı n = 2, si v = y−1, se obtiene:
v′ − 1
xv = −x lnx, ⇒
P (x) = − 1
x, Q(x) = −x lnx, es decir:
v = elnx[∫−x lnxe− lnx dx+ C
]
v = x [−x lnx+ x+ C] = −x2 lnx+ x2 + Cx, luego
y =1
−x2 lnx+ x2 + Cx
Ejercicios 3.38. Resuelva cada una de las siguientes ecuaciones diferen-
ciales de Bernoulli:
1) y′ − y + y2(x2 + x+ 1) = 0
2) xy′ − 2y = 4x3y1/2
3) xy′ + y =1
y2
4) y′ = y(xy3 − 1)
5) 3(1 + x2)dy
dx= 2xy(y3 − 1)
Resuelva la ecuacion diferencial dada, sujeta a las condiciones iniciales indi-
cadas
6) y1/2dy
dx+ y3/2 = 1, y(0) = 4
7) xy(1 + xy2)dy
dx= 1, y(1) = 0

76 CAPITULO 3. ECUACIONES DIFERENCIALES
3.8. Problemas de aplicacion
Ejemplo 3.39.
En el estudio de crecimiento de una poblacion (humana, animal o bacteri-
ana), si p(t) nos indica la cantidad de pobladores que hay en cada instante
de tiempo t (suponiendo que p(t) es una funcion continua), su variacion
(crecimiento) es directamente proporcional a la cantidad de habitantes exis-
tentes en cada tiempo t es decir:dp
dt= kp(t)
donde k es una constante positiva por determinar. La poblacion de una co-
munidad aumenta en un instante cualquiera con la rapidez proporcional al
numero de personas en dicho instante. Si la poblacion se duplica en cinco
anos ¿cuanto demorara en triplicarse? Si la poblacion despues de 3 anos es
de 10000 habitantes ¿cual es la poblacion inicial?dp
dt= kp(t); p(0) = p0
p(t) = Cekt como p(0) = p0 ⇒ C = p0
ademas p(5) = 2p0, ⇒ p(5) = p0e5k, es decir
2p0 = p0e5k ⇒ k =
ln 2
5= 0,1386
Ahora, como p(3) = 10000 ⇒ 10000 = p0e3(0,1386),
por lo tanto: p0 ≈ 6597.
La otra parte del ejemplo se deja como ejercicio.
Ejemplo 3.40.
De acuerdo a ley de Kirchhoff, un circuito electrico L−R con una resisten-
cia de R ohmios(Ω) y un inductor con inductancia de L Henries(H)
en serie con una fuente de fuerza electromotriz que proporciona un voltaje
E(t) voltios en el tiempo t satisface la ecuacion diferencial:
Ldi
dt+Ri(t) = E(t)
Donde i(t) es la corriente medida en amperes. Si L = 2H, R = 6Ω, E(t) =
12V , e i(0) = 0,
encontrar la corriente i(t) que resulta.
2di
dt+ 6i = 12
dividiendo por 2 se obtiene:

3.8. PROBLEMAS DE APLICACION 77
di
dt+ 3i = 6, luego
i(t) = e−3t[∫
6e3t dt+ C]i(t) = 2 + Ce−3t.
Como i(0) = 0 ⇒ i(t) = 2− 2e−3t
Ejemplo 3.41.
En un circuito R − C con una resistencia R, un capacitor C faradios (F )
en serie, con una fuerza electromotriz que genera E(t) voltios satisface la
ecuacion diferencial:
Ri+1
Cq(t) = E(t)
la carga q(t) esta relacionada con la corriente i(t) mediante la ecuacion:
i(t) =dq
dtde esta forma, la ecuacion original se transforma en:
Rdq
dt+
1
Cq(t) = E(t)
A un circuito en serie en el cual la resistencia es de 200Ω y la capacitancia
es C = 10−4F , se aplica una tension de 100V. Calcule la carga q(t) en el
capacitor si q(0) = 0, y obtenga la corriente i(t).
Rdq
dt+
1
Cq(t) = E(t) ⇒
200dq
dt+
1
10−4q(t) = 100, o sea:
dq
dt+ 50q = 0,5, luego:
q(t) = e−50t[∫
0,5e50t dt+ C]= e−50t(0,01e50t + C) q(t) = 0,01 + Ce−50t,
como q(0) = 0 ⇒q(t) =
1
100− 1
100e−50t, e i(t) =
1
2e−50t.
Ejemplo 3.42.
La variacion del precio c(t) de la U.V.R. en cada instante (dıa )(suponiendo
que c(t) es una funcion continua) es directamente proporcional al valor de
la U.V.R. en cada dıa, esto es:
q′(t) = λc(t)
Entonces c(t) = c0eλt donde c0 es el valor inicial. Si el valor de la U.V.R.
el 7 de marzo de 2001 es de $114.0742 y el valor el dıa 6 de marzo fue de
$114.0317 ¿cual sera el valor el dıa 31 de marzo?
Este ejercicio se debe actualizar, debido a la filosofıa de incremento ingerida
por la corte (incremento por la inflacion causada mes a mes).

78 CAPITULO 3. ECUACIONES DIFERENCIALES
Ejemplo 3.43.
Ley de enfriamiento de Newton
La variacion de la temperatura respecto al tiempo de un cuerpo que se
esta enfriando es directamente proporcional a la diferencia de la temperatura
del medio ambiente, y la temperatura presente en el cuerpo a cada instante,
es decir:
dT
dt∝ [To − T (t)], lo que significa que
dT
dt= k [To − T (t)], o,
dT
dt= k [T (t)− To]. (3.3)
Ası pues si una varilla de metal se saca de un horno en el que ha alcanzado
una temperatura de 200oc y al cabo de 40 minutos su temperatura es de
100oc ¿Cual es la temperatura de la varilla despues de 1 12 horas si se sabe
que la temperatura del medio ambiente es de 10oc?
De la ecuacion 3.3 se sabe que:
dT
(To − T (t))= k dt luego
∫dT
(To − T (t))= k
∫
dt es decir:
− ln[To − T (t)] = kt+ c1 luego
eln(To−T (t)) = e−kt−c1 de aquı
To − T (t) = ce−kt por lo tanto,
To − ce−kt = T (t); que podemos escribir
T (t) = To − ce−kt ahora, sabiendo que
T (0) = 200oc; T (40) = 100o y To = 10oc tenemos
T (t) = 10 + 190e−0,0186t ası que
T (90) = 10 + 190e−0,0186(90)
T (90) ≈ 45,62oc

3.8. PROBLEMAS DE APLICACION 79
notemos ademas que a medida que pasa el tiempo la temperatura de la
varilla tiende a 10o, es decir la temperatura del medio ambiente. Esto se
puede escribir:
lımt→∞
(T (t)) = lımt→∞
[10 + 190e−0,0186t
]= 10
Notemos ademas que la constante k de la ecuacion (3.3) sera pequena en
valor absoluto si la temperatura del medio ambiente es grande, y sera grande
en valor absoluto si la temperatura del medio ambiente es pequena.
Ejemplo 3.44.
En el ejemplo 3.39 el problema de crecimiento de una poblacion, puede refor-
mularse, si se tiene en cuenta que algunas poblaciones tienen la restriccion
del crecimiento debido a la falta de alimentos, la sobrepoblacion o carencia
de espacios etc, por estas razones la poblacion no puede exceder un maxi-
mo M(M > 0), y desde luego parece razonable proponer que el modelo de
crecimiento de la poblacion es: “la variacion de la poblacion con respecto al
tiempo” de cierta especie es DIRECTAMENTE proporcional al producto de
la poblacion existente en cada instante con la diferencia entre la capacidad
maxima y la poblacion en cada instante ası:
dp
dt∝ p(t).[M − p(t)] es decir
dp
dt= kp(t).[M − p(t)]
Esta ecuacion es llamada ecuacion logıstica. En otros escritos aparece con
otras presentaciones (equivalentes a la que aquı se presenta). Luego:
dp
p(t).[M − p(t)]= k dt
integrando a cada lado de la ecuacion se obtiene:
∫dp
p(t).[M − p(t)]=
∫
k dt es decir
80 CAPITULO 3. ECUACIONES DIFERENCIALES
1
M
∫dp
p(t)+
1
M
∫dp
M − p(t)= kt+ c1 luego
1
M
[∫dp
p(t)+
∫dp
M − p(t)
]
= kt+ c1
1
M
[
ln
(p(t)
M − p(t)
)]
= kt+ c1 luego
ln
(p(t)
M − p(t)
)
= Mkt+Mc1 es decir
p(t)
M − p(t)= ceMkt
p(t) = [M − p(t)] ceMkt
p(t) =MceMkt
1 + ceMkt
p(t) =Mc
c+ e−Mkt
Ejemplo 3.45.
La capacidad de una conejera es de 5000 individuos. Si inicialmente hay
1200 y al cabo de seis meses la poblacion es de 2000, ¿Cual es la ecuacion
que describe la cantidad de conejos existentes?
dp
dt= k p(t)(5000− p(t)) entonces
p(t) =5000c
c+ e−5000kt
como p(0) = 1200, entonces
1200 =5000 c
c+ 1
(c+ 1)1200 = 5000 c
1200 = 3800 c;
6
19= c c = 0,31578
entonces p(t) =5000× 0,31578
0,31578 + e−5000kt
p(t) =1578,94
0,31578 + e−5000kt

3.8. PROBLEMAS DE APLICACION 81
como P (0) = 2000; entonces
2000 =1578,94
0,31578 + e−30000k
2000e−30000k = 947,38
e30000k = 0,47369
k = 0,000024 entonces
p(t) =1578,94
0,31578 + e−0,12t
Ejemplo 3.46.
Un tanque contiene inicialmente 400 litros de agua donde se ha disuelto 50
gr de sal y le estan entrando 8 lmın de solucion salina con 2 gr de sal por litro;
bien mezclado, de el sale liquido con la misma rapidez. Calcule la cantidad
A(t) de gramos de sal que hay en el tanque en cualquier instante. La razon
de cambio de la cantidad de sal que hay en cada instante (A(t)) respecto
al tiempo esdA
dt= AE − AS ; donde AE es la cantidad de sal entrante
por minuto y AS es la cantidad de sal saliente por minuto. Entonces
dA
dt= 8 ∗ 2− A(t)
400∗ 8
dA
dt= 16− A(t)
50; A(0) = 50gr
dA
dt=
800−A(t)
5050dA
800−A(t)= dt
50
∫dA
800−A(t)=
∫
dt
−50 ln[800−A(t)] = t+ c
ln[800−A(t)] = − t
50− c1
50
800−A(t) = ce−t50 luego
A(t) = 800− ce−t50 como A(0) = 50
entonces c = 750 y ası
A(t) = 800− 750e−t50

82 CAPITULO 3. ECUACIONES DIFERENCIALES
Notese que a medida que el tiempo transcurre la salmuera que va quedando
en el tanque va teniendo la misma concentracion de sal que el agua que entra
al tanque y por tanto la cantidad de sal que va quedando en el tanque es de
800 gr. Esto se puede formalizar verificando que:
lımt→∞
A(t) = lımt→∞
[
800− 750e−t50
]
lımt→∞
A(t) = 800
Ejemplo 3.47.
En el ejemplo anterior si se supone que el tanque tiene una capacidad de
1000 litros y si la velocidad con que sale la solucion salina es apenas de
6 lmın . Calcule la cantidad A(t) de gramos de sal que hay en el tanque en
cualquier instante.
dA
dt= 16−
(A(t)
400 + 2t
)
∗ 6
entoncesdA
dt= 16− 6A(t)
400 + 2t
es decirdA
dt+
6A(t)
400 + 2t= 16
p(t) =6
400 + 2t∫
p(t) dt = 3 ln(400 + 2t)
entonces A(t) = e−3 ln(400+2t)
[∫
e3 ln(400+2t) ∗ 16 dt+ c
]
A(t) =1
(400 + 2t)3
[
16
∫
(400 + 2t)3 dt+ c
]
A(t) =16
(400 + 2t)31
2
[(400 + 2t)4
4+ c
]
A(t) =2
(400 + 2t)3[(400 + 2t)4 + c
]
A(t) = 2(400 + 2t) +2c
(400 + 2t)3
como A(0) = 50

3.8. PROBLEMAS DE APLICACION 83
50 = 2(400) +2c
(400)3
(−750) ∗ (400)3 = 2c
2c = −4,80 ∗ 1010, luego
A(t) = 2(400 + 2t)− 4,8 ∗ 1010(400 + 2t)3
Ejercicios 3.48.
1. La poblacion de una ciudad crece en un instante, con una rapidez pro-
porcional a la cantidad de habitantes en dicho instante. Su poblacion
inicial es de 50.000 habitantes y aumenta el 10% en 10 anos.
¿Cual sera la poblacion dentro de 40 anos?
2. A un circuito en serie, en el cual la inductancia es de 0.1 H y la re-
sistencia 50Ω, se le aplica una tension E(t) = 50V . Calcule la corriente
i(t) si i(0) = 0.
3. A un circuito en serie, en el cual la resistencia es de 1000Ω y la ca-
pacitancia de 5 × 10−6F se le aplica una tension de 200V. Encuentre
la carga q(t) en el capacitor si i(0) = 0,4. Determine la carga y la
corriente para t = 0,005seg y la carga cuando t→∞
4. Encuentre la corriente i(t) si R = 106Ω,L = 1H, E(t) = 1V y i(0) = 0
5. Encuentre i(t) suponiendo i(0) = 0, R = 1000Ω, L = 3,5H y E(t) =
120 sin(377t).
6. Si en el ejemplo 3.46 se supone que la velocidad de la salida de la
salmuera es de 10 lmın . Calcule la cantidad A(t) de gramos de sal que
hay en el tanque en cualquier instante.
7. En el ejercicio anterior en que tiempo estara el tanque desocupado.

84 CAPITULO 3. ECUACIONES DIFERENCIALES
8. La cantidad N(t) de personas en una comunidad bajo la influencia de
determinado anuncio se modela por la ecuacion logıstica. Al principio
N(0) = 500 mientras se observa que N(1) = 1000. se pronostica que
habra un lımite de 50000 individuos que veran el anuncio. Determine:
a) N(t)
b) N(10)
9. La cantidad de peces P (t) que viven en un estanque se modela por
la ecuacion logıstica. Al principio P (0) = 5000 al cabo de un ano
hay 25000 individuos. Se pronostica que la capacidad del tanque es
de 250.000 individuos. Determinar:
a) P (t)
b) P (5)
La ecuacion logıstica tambien se puede escribir de la forma:
dp
dt= p(a− bp)
10. El modelo de crecimiento demografico de un suburbio en una gran
ciudad, esta descrita con la ecuacion de valor inicial:
dp
dt= p(10−1 − 10−7p); P (0) = 5000
en donde el tiempo t esta dado en meses.
a) ¿Cual es el valor lımite de la poblacion?
b) ¿En que momento igualara la poblacion ese valor lımite?
11. Un tanque contiene 1500 litros agua donde se han disuelto 500 gramos
de sal. Si al tanque le estan entrando 8 lmın de agua salada con una
concentracion de 2gr de sal por litro y a su vez se le esta sacando agua
a la misma rapidez. Calcule la capacidad de sal A(t) que hay dentro
del tanque a cada instante.
3.8. PROBLEMAS DE APLICACION 85
12. En el problema anterior, si se le esta sacando agua a razon de 12 lmın .
Calcule la cantidad de sal A(t) que hay en el tanque en cada instante.
¿Cuanto tiempo demorara en vaciarse el tanque?
13. En el problema (11) si se le esta sacando agua a razon de 6 lmın . Calcule
la cantidad de sal A(t) que hay en cada instante. Si la capacidad del
tanque es de 2000 litros:
a) ¿Cuanto tiempo demorara en llenarse el tanque?
b) ¿Cual es la concentracion de sal que tiene el agua cuando el
tanque esta lleno?
14. Si una barra metalica, cuya temperatura es de 20c, se introduce en
un recipiente que contiene agua hirviente.
a) ¿Cuanto tiempo tardara en alcanzar 80c, si se sabe que la
temperatura subio 2c en un segundo?
b) ¿Cuanto tiempo tardara en llegar a 98c?
15. Un termometro indica 20c si se coloca dentro de un horno precalen-
tado a temperatura constante. A traves de una ventana de vidrio del
horno, un observador registra que el termometro marca 60c despues
de 12 minuto, y de 95c despues de un minuto. ¿A que temperatura
esta el horno?

86 CAPITULO 3. ECUACIONES DIFERENCIALES
3.9. Ecuaciones lineales homogeneas de segundo
orden y orden superior
Una ecuacion diferencial lineal homogenea de segundo orden es de la forma:
y′′ + a(x)y′ + b(x)y = 0
donde a(x) y b(x) son funciones continuas en un intervalo I. En esta
seccion se trabajaran ecuaciones diferenciales con coeficientes constantes, es
decir ecuaciones de segundo orden en donde a(x) = a y b(x) = b, siendo a
y b constantes. Es facil verificar que si u1(x) y u2(x) son dos soluciones
de la ecuacion diferencial
y′′ + ay′ + by = 0 (3.4)
entonces
y = c1u1(x) + c2u2(x) (3.5)
(c1 y c2 constantes) tambien es otra solucion de (3.4). Ademas, si u1(x)
no es un multiplo constante de u2(x) (son linealmente independientes)
cualquier solucion de (3.4) es de la forma (3.5) que es la solucion general.
Ahora se puede probar que cualquier ecuacion diferencial de segundo orden
tiene dos soluciones linealmente independientes.
Se probo que la ecuacion diferencial y′ + ay = 0 tiene una solucion de la
forma y = e−ax, ademas toda solucion es de la forma y = ce−mx, c ∈ RRR.Podemos suponer que la ecuacion (3.4) tiene una solucion de la forma
y = emx, m ∈ RRR, luego como y′ = memx, y′′ = m2emx, entonces:
m2emx + amemx + bemx = 0
es decir, (m2+am+b)emx = 0, como emx 6= 0 se tiene que m2+am+b =
0, es decir que la funcion y = emx es solucion de (3.4) si y solo si m es
una raız de la ecuacion
m2 + am+ b = 0 (3.6)
que es llamada ecuacion auxiliar. Ahora las raıces de la ecuacion cuadratica
(3.6) pueden ser:

3.9. ECUACIONES LINEALES HOMOGENEAS 87
I) Reales y distintas
Digamos r1 y r2, r1 6= r2 en cuyo caso u1(x) = er1x y u2(x) = er2x
son soluciones y cualquier solucion es de la forma y = c1er1x + c2e
r2x.
Ejemplo 3.49. Solucione la ecuacion diferencial: y′′ − y′ − 12y = 0.
La ecuacion auxiliar es: m2 − m − 12 = 0, y las raıces de esta ecuacion
son : m1 = 4 y m2 = −3 (se pueden obtener por factorizacion o por la
formula cuadratica). Luego u1(x) = e4x y u2(x) = e−3x son soluciones de
la ecuacion diferencial dada y por tanto: y = c1e4x + c2e
−3x es la solucion
general.
II) Reales e iguales, digamos r
Entonces las funciones u1(x) = erx y u2(x) = xerx son soluciones de
y′′+by′+cy = 0. En efecto: u′1(x) = rerx y u′′1(x) = r2erx luego u′′1(x)+
bu′1(x)+cu1(x) = r2erx+brerx+cerx = erx(r2+br+c), como r es solucion
de la ecuacion (3.6) esto quiere decir que :
r2 + br + c = 0 (3.7)
De esta forma u′′1(x)+bu′1(x)+cu1(x) = 0. Ahora veamos que u2(x) = xerx
es solucion de (3.7) :
u′2(x) = erx + rxerx
u′′2(x) = rerx + rerx + r2xerx = 2rerx + r2xerx, luego
u′′2(x) + bu′2(x) + cu2(x) = 2rerx + r2xerx + b(erx + rxerx) + cxerx
= erx[2r + r2x+ b+ brx+ cx]
= erx[2r + b+ x(r2 + br + c)] = erx[2r + b]; como b = −2r por ser r la
unica raız, entonces u′′2(x)+bu′2(x)+cu2(x) = erx,0 esto es u′′2(x)+bu′2(x)+
cu2(x) = 0 ademas
u1(x) = erx y u2(x) = xerx es un conjunto linealmente independiente,
entonces y = c1erx + c2xe
rx es la solucion general de la ecuacion (3.4).
III) Complejas y conjugadas
Es decir r1 = α + βi y r2 = α − βi entonces las funciones u1(x) =
eαx cosβx y u2(x) = eαx sinβx son soluciones de (3.4), ademas, lineal-

88 CAPITULO 3. ECUACIONES DIFERENCIALES
mente independientes entonces la solucion general de (3.4) es de la forma:
y = c1eαx cosβx+ c2e
αx sinβx
Ejemplo 3.50. Resolver la ecuacion diferencial: y′′ − 5y′ + 6y = 0.
La ecuacion auxiliar es: m2−5m+6 = 0 cuyas soluciones son m = 3, m =
2 luego las funciones u1(x) = e3x y u2(x) = e2x son las soluciones de la
ecuacion dada y por tanto la solucion general es: y = c1e3x + c2e
2x
Ejemplo 3.51. Resolver la ecuacion diferencial: y′′ + 10y′ + 25y = 0
La ecuacion auxiliar es: m2+10m+25. La unica solucion es m = −5 luego
las soluciones son u1(x) = e−5x y u2(x) = xe−5x por tanto la solucion
general es: y = c1e−5x + c2xe
−5x
Ejemplo 3.52. Encontrar la solucion general de la ecuacion diferencial:
y′′ + 2y′ + 2y = 0
Su ecuacion auxiliar es m2+2m+2 = 0 y las soluciones de dicha ecuacion
son: r1 = −1 + i y r2 = −1 − i luego las soluciones de la ecuacion
diferencial dada son: u1(x) = e−x cosx y u2(x) = e−x sinx, es decir que
la solucion general es:
y = c1e−x cosx+ c2e
−x sinx
Ejercicios 3.53.
I) Encuentre la solucion general de cada una de las ecuaciones diferenciales
dadas.
1) y′′ + 5y′ − 6y = 0 2) y′′ + 3y′ + y = 0
3) y′′ + 6y′ − 7y = 0 4) y′′ + y′ − 6y = 0
5) y′′ + y′ + y = 0 6) y′′ + 9y = 0
II) Resuelva cada una de las ecuaciones diferenciales dadas con las condi-
ciones iniciales indicadas:
1) y′′ + 6y′ − 7y = 0; y(0) = 0, y′(0) = 4
2) y′′ + 4y = 0; y(π
4) = 2, y′(
π
4) = 3

3.9. ECUACIONES LINEALES HOMOGENEAS 89
3) y′′ + 9y = 0; y(π
3) = 3, y′(
π
3) = 3
4) y′′ − 4y′ − 6y = 0; y(0) = 1, y′(0) = 2
5) y′′ + 4y′ + 10y = 0; y(0) = 2, y′(0) = −1
3.9.1. Ecuaciones no-homogeneas de segundo orden
Una ecuacion diferencial no homogenea de segundo orden con coeficientes
constantes es de la forma:
y′′ + by′ + cy = f(x) (3.8)
donde f(x) es una funcion definida y continua en un intervalo I. Se puede
ver que la solucion general de (3.8) es yg = yh + yp donde yh es la
solucion general de la ecuacion homogenea y′′+ by′+ cy = 0 y yp es una
solucion particular de la ecuacion (3.8). Existen dos metodos para encontrar
una tal solucion:
1) Metodo de los coeficientes indeterminados
Este metodo utilizado para el calculo de soluciones particulares, en general
no es eficaz pues no siempre es aplicable, su entorno de aplicabilidad son las
funciones f cuya forma “general” es de uno de los siguientes tipos:
1. f(x) = anxn + an−1x
n−1 + . . .+ a1x+ a0 : funciones polinomicas
2. f(x) = Aeαx : funciones exponenciales
3. f(x) = A cos(βx) + B sin(βx): combinaciones lineales de sin(βx)
y cos(βx) o producto de dos o tres funciones distintas, es decir;
productos de la forma:
4. f(x) =(anx
n + an−1xn−1 + . . .+ a1x+ a0
)eαx
5. f(x) =(anx
n + an−1xn−1 + . . .+ a1x+ a0
)cos(βx)
6. f(x) =(anx
n + an−1xn−1 + . . .+ a1x+ a0
)sin(βx)
7. f(x) = [A cos(βx) +B sin(βx)] eαx
8. f(x) =(anx
n + an−1xn−1 + . . .+ a1x+ a0
)eαx cos(βx)

90 CAPITULO 3. ECUACIONES DIFERENCIALES
Definicion 3.54. f pertenece al generado de u1, u2, u3, . . . , un si existen
escalares no todos cero c1, c2, c3, . . . , cn tales que
f(x) = c1u1 + c2u2 + c3u3 + · · ·+ cnun
en tal caso escribimos f ∈ gen(u1, u2, u3, . . . , un).Parte de f pertenece al generado de u1, u2, u3, . . . , un si algun termino
de los que forman a f pertenece al generado de u1, u2, u3, . . . , un.
En la ecuacion diferencial y(n) + an−1y(n−1) + · · · + a1y
′ + a0y = f(x), si
f(x) no pertenece toda ni parte al generado por las soluciones particulares
u1, u2, u3, . . . , un de la ecuacion homogenea asociada, en este caso la solucion
particular de la no homogenea es la forma general de la funcion f.
Ejemplo 3.55.
y′′ + 4y′ + 3y = x2
las soluciones particulares de la homogenea asociada son:
u1 = e−3x u2 = e−x
x2 /∈ gen(e−3x, e−x
)entonces la solucion particular yp de la no-
homogenea es de la forma:
yp = a2x2 + a1x+ a0
y′p = 2a2x+ a1
y′′p = 2a2
entonces:
2a2 + 4 (2a2x+ a1) + 3(a2x
2 + a1x+ a0)
= x2
3a2x2 + (8a2 + 3a1)x+ (2a2 + 4a1 + 3a0) = x2
es decir:
3a2 = 1; 8a2 + 3a1 = 0; 2a2 + 4a1 + 3a0 = 0
luego:
a2 =1
3, a1 = −
8
9, a0 = −
38
27

3.9. ECUACIONES LINEALES HOMOGENEAS 91
por lo tanto la solucion particular es:
yp =1
3x2 − 8
9x− 38
27
y en consecuencia la solucion general es:
yg = c1e−3x + c2e
−x +1
3x2 − 8
9x− 38
27
Ejemplo 3.56.
y′′ + 4y = (3x+ 1)e2x
las soluciones particulares de la homogenea son:
u1 = cos (2x) u2 = sin (2x)
como (3x + 1)e2x /∈ gen (cos (2x) , sin (2x)) , entonces la solucion parti-
cular de la no-homogenea es:
yp = (a1x+ a0) e2x
y′ = (2a1x+ a1 + 2a0) e2x
y′′ = (4a1x+ 4a1 + 4a0) e2x
Entonces:
(4a1x+ 4a1 + 4a0) e2x + 4 (a1x+ a0) e
2x = (3x+ 1)e2x
(8a1x+ 8a0 + 4a1) e2x = (3x+ 1)e2x
es decir.
8a1 = 3 8a0 + 4a1 = 1
luego:
a1 =3
8a0 = −
1
16
por tanto la solucion particular de la no-homogenea es:
yp =
(3
8x− 1
16
)
e2x
y en consecuencia la solucion general de la ecuacion diferencial es:
yg = c1 cos (2x) + c2 sin (2x) +
(3
8x− 1
16
)
e2x

92 CAPITULO 3. ECUACIONES DIFERENCIALES
Ejemplo 3.57.
y′′ − 4y′ + 13y = 5 sin (2x)
las soluciones particulares de la homogenea son:
u1 = e2x cos (3x) u2 = e2x sin (3x)
como 5 sin (2x) /∈ gen(e2x cos (3x) , e2x sin(3x)
), entonces la solucion
particular de la no-homogenea es:
yp = A sin (2x) +B cos (2x)
y′p = 2A cos (2x)− 2B sin (2x)
y′′p = −4A sin (2x)− 4B cos (2x)
Entonces:
−4A sin (2x)− 4B cos (2x)− 4 (2A cos (2x)− 2B sin (2x))
+13 (A sin (2x) +B cos (2x)) = 5 sin (2x)
(8B + 9A) sin (2x) + (−9A+ 9B) cos (2x) = 5 sin (2x)
es decir.
8B + 9A = 5 −8A+ 9B = 0
luego:
A =9
29B =
8
29
en consecuencia la solucion particular de la no-homogenea es:
yp =9
29sin (2x) +
8
29cos (2x)
y la solucion general de la ecuacion diferencial es:
yg = c1e2x cos (3x) + c2e
2x sin (3x) +9
29sin (2x) +
8
29cos (2x)
Ejemplo 3.58.
y′′ + y′ + 6y = 2ex cos (4x)

3.9. ECUACIONES LINEALES HOMOGENEAS 93
las soluciones particulares de la homogenea son:
u1 = e−3x u2 = e2x
como ex cos (4x) /∈ gen(e−3x, e2x
), entonces la solucion particular de la
no-homogenea es:
yp = Aex cos (4x) +Bex sin (4x)
y′p = [(B − 4A) sin (4x) + (4B +A) cos (4x)] ex
y′′p = [(8B − 15A) cos (4x)− (15B − 8A) sin (4x)] ex
luego reemplazando en la ecuacion y′′ + y′ + 6y = 2ex cos (4x) se obtiene:
(12B − 20A) cos (4x) + (−20B − 12A) sin (4x) = 2 cos (4x)
es decir.
12B − 20A = 2 −20B − 12A = 0
solucionando este sistema de ecuaciones resulta
A = − 5
68B =
3
68
de esta forma:
yp =
[
− 5
68cos (4x) +
3
68sin (4x)
]
ex
y la solucion general yg es:
yg = c1e−3x + c2e
2x −[5
68cos (4x)− 3
68sin (4x)
]
ex
Ahora, si la funcion f (x) de la ecuacion diferencial:
y(n) + an−1y(n−1) + · · ·+ a1y
′ + a0y = f (x) (3.9)
pertenece toda al generado por las soluciones particulares u1, u2, . . . , un de
la ecuacion homogenea y(n) + an−1y(n−1) + · · ·+ a1y
′ + a0y = 0, es decir
f (x) ∈ gen (u1, u2, . . . , un)

94 CAPITULO 3. ECUACIONES DIFERENCIALES
entonces la solucion particular de la no-homogenea es: y1 = xf (x). Ahora,
si esta funcion y1 ∈ gen (y1, y2, . . . , yn) entonces la solucion particular
y2 = x2f (x) es la solucion particular de (3.9) y se continua de esta forma
hasta que xnf (x) /∈ gen (u1, u2, . . . , un), para algun n > 0. Ahora, si
parte de f(x) pertenece al generado por u1, u2, . . . , un, entonces dicha
parte se multiplica por xn para algun n > 0 hasta que la nueva parte no
pertenezca al generado por u1, u2, . . . , un.
Ejemplo 3.59. Encontrar la solucion general de:
y′′ − y′ − 6y = 2e3x
las soluciones particulares de la ecuacion homogenea asociada son:
u1 = e3x u2 = e−2x
como 2e3x ∈ gen(e3x, e−2x
), entonces la solucion particular es:
yp = Axe3x
entonces:
y′p = Ae3x + 3Axe3x = (A+ 3Ax)e3x
y′′p = 3Ae2x + 3(A+ 3Ax)e3x
y′′p = (6A+ 9Ax) e2x
en consecuencia:
(6A+ 9Ax) e2x − (A+ 3Ax) e2x − 6Axe3x = 2e3x
5Ae3x = 2e3x A =2
5
de esta forma: yp = 25xe
3x es la solucion particular de la ecuacion no-
homogenea y′′ − y′ − 6y = 2e3x y en consecuencia la solucion general yg
es:
yg = c1e3x + c2e
−2x +2
5xe3x

3.9. ECUACIONES LINEALES HOMOGENEAS 95
Ejemplo 3.60. encontrar la solucion general de:
y(5) + 9y(3) = x2
las soluciones particulares de la ecuacion homogenea son:
u1 = 1, u2 = x, u3 = x2, u4 = cos (3x) , u5 = sin (3x)
la posible solucion particular de la no-homogenea es:
y = a2x2 + a1x+ a0
como a2x2 + a1x + a0 ∈ gen (y1, y2, y3, y4, y5) , entonces la solucion
particular es:
yp = a2x5 + a1x
4 + a0x3 /∈ gen (y1, y2, y3, y4, y5) , luego
y′p = 5a2x4 + 4a1x
3 + 3a0x2
y′′p = 20a2x3 + 12a1x
2 + 6a0x
y′′′p = 60a2x2 + 24a1x+ 6a0
y(4)p = 120a2x+ 24a1
y(5)p = 120a2
120a2 + 540a2x2 + 216a1x+ 54a0 = x2
540a2x2 + 216a1x+ (120a2 + 54a0) = x2
a2 =1
540a1 = 0 a0 = −
1
243
luego la solucion particular de la no-homogenea es:
yp = − 1
243x3 +
1
540x5
y la solucion general de la ecuacion es:
yg = c1 + c2x+ c3x2 + c4 cos (3x) + c5 sin (3x)−
1
243x3 +
1
540x5

96 CAPITULO 3. ECUACIONES DIFERENCIALES
Ejemplo 3.61. Encuentre la solucion general de:
y′′′ − 3y′ + 2y = 3xex
las soluciones particulares de la homogenea son:
u1 = ex u2 = xex u3 = e−2x
3xex ∈ gen(ex, xex, e−2x
)
entonces la solucion particular de la no-homogenea es:
yp =[a0x
2 + a1x3]ex
y′p =[2a0x+ (3a1 + a0)x
2 + a1x3]ex
y′′p =[2a0 + (6a1 + 4a0)x+ (6a1 + a0)x
2 + a1x3]ex
y′′′p =[(6a1 + 6a0) + (18a1 + 6a0)x+ (9a1 + a0)x
2 + a1x3]ex
luego al reemplazar estas expresiones en la ecuacion dada se obtiene:
[(6a0 + 6a1) + 18a1x] ex = 3xex
es decir:
18a1 = 3 6a0 + 6a1 = 0
a1 =1
6a0 = −
1
6
luego la solucion particular es:
yp =
(
−1
6x2 +
1
6x3)
ex
y la solucion general de la ecuacion dada es:
yg = c1ex + c2xe
x + c3e−2x +
(1
6x3 − 1
6x2)
ex

3.9. ECUACIONES LINEALES HOMOGENEAS 97
Ejercicios 3.62. Use el metodo de los coeficientes indeterminados para cal-
cular la solucion general de cada una de las ecuaciones diferenciales dadas.
1. y′′ − y′ − 20y = 2 + 3x2
2. y′′ + 2y′ − 15y = xe2x
3. y′′ − 3y′ − 10y = 3 cos (2x)
4. y′′ − 4y′ + 3y = 3xe−x
5. y′′′ + 2y′′ − y′ − 2y = 3ex
6. y′′′ − 5y′′ + 8y′ − 4y = (3 + 2x) e2x
7. y′′′ − y′′ + 9y′ − 9y = 5 cos (3x)
8. y(IV ) − y′′ = (1 + 2x) ex
9. y(IV ) − y′′ = 3 + 5x
10. y(IV ) + 3y′′ − 4y = cos (2x)
2) Metodo de variacion de parametros
Si u1(x) y u2(x) son dos soluciones linealmente independientes de la
ecuacion homogenea se puede probar que existe una solucion particular yp
de la ecuacion no-homogenea y es de la forma:
yp = u1(x) v1(x) + u2(x) v2(x)
donde v1(x) y v2(x) son funciones por determinar, definidas y continuas
en un intervalo I. Supongamos que:
yp = u1(x) v1(x) + u2(x) v2(x)
es solucion de (3.8), entonces:
y′p = u′1(x) v1(x) + u1(x) v′1(x) + u′2(x) v2(x) + u2(x) v
′2(x)
Si exigimos que u1(x)v′1(x) + u2(x)v
′2(x) = 0, entonces
y′′p = u′′1(x) v1(x) + u′1(x) v′1(x) + u′′2(x) v2(x) + u′2(x) v
′2(x)

98 CAPITULO 3. ECUACIONES DIFERENCIALES
que se puede escribir:
y′′p = u′′1 v1 + u′1 v′1 + u′′2 v2 + u′2 v
′2, luego
u′′1v1 + u′1v′1 + u′′2v2 + u′2v
′2 + b(u′1v1 + u′2v2) + c(u1v1 + u2v2)
= u′′1v1 + bu′1v1 + cu1v1 + u′′2v2 + bu′2v2 + cu2v2 + u′1v′1 + u′2v
′2
= u′1v′1 + u′2v
′2, luego si hacemos que
u′1v′1 + u′2v
′2 = f(x),
entonces yp es efectivamente solucion de (3.8) de la pagina 89.
De las condiciones
u1v′1 + u2v
′2 = 0
u′1v′1 + u′2v
′2 = f(x)
que exigimos y usando la regla de crammer se encuentra que
v′1 =
∣∣∣∣∣
0 u2
f(x) u′2
∣∣∣∣∣
∣∣∣∣∣
u1 u2
u′1 u′2
∣∣∣∣∣
=−u2f(x)
u1u′2 − u2u′1
entonces,
v1 =
∫ −u2f(x)u1u′2 − u2u′1
dx,
y en forma similar se concluye que
v2 =
∫u1f(x)
u1u′2 − u2u′1dx

3.9. ECUACIONES LINEALES HOMOGENEAS 99
Ejemplo 3.63. Resolver las ecuaciones diferenciales usando variacion de
parametros.
1) y′′ − 4y = e2x
Las soluciones de la ecuacion homogenea son u1(x) = e2x y u2(x) = e−2x,
luego la solucion homogenea es:
yh = c1e2x + c2e
−2x, y una solucion particular de la no homogenea es
yp = v1e2x + v2e
−2x, donde
v1 = −∫
e−2xe2x
−4 dx =
∫1
4dx =
1
4x, Ahora
v2 =
∫e2xe2x
−4 dx = −1
4
∫
e4xdx = − 1
16e4x, es decir
yp =1
4xe2x − 1
16e4xe−2x =
1
4xe2x − 1
16e2x, y se concluye que
yg = c1e2x + c2e
−2x +1
4xe2x − 1
16e2x
es la solucion general de la ecuacion diferencial dada.
2) y′′ − 3y′ + 2y =ex
ex + 1
Las soluciones de la homogenea son: u1 = ex y u2 = e2x, luego la
solucion general esta dada por: yh = c1ex + c2e
2x.
Una solucion particular de la no homogenea es:
yp = v1ex + v2e
2x, donde
v1 = −∫
e2x( ex
1+ex )
e3xdx = −
∫dx
1 + ex
v1 = ln(1 + e−x), ahora
v2 =
∫ex( ex
1+ex )
e3xdx =
∫e−x
1 + exdx = −e−x + ln(1 + e−x)

100 CAPITULO 3. ECUACIONES DIFERENCIALES
luego la solucion particular es:
yp = ex ln(1 + e−x) + e2x[−e−x + ln(1 + e−x)]
= ex ln(1 + e−x)− ex + e2x ln(1 + e−x)
y la solucion general es
yg = c1ex + c2e
2x + ex ln(1 + e−x) + e2x ln(1 + e−x)
Ejercicios 3.64. Use el metodo de variacion de parametros para solucionar
cada una de las siguientes ecuaciones diferenciales:
1) y′′ − 9y = x 2) y′′ − 2y′ + y = x2 + x
3) y′′ − y′ − 2y = 2 sinx 4) y′′ + 4y = 2 cos 2x
5) y′′ + 9y = sin 3x 6) y′′ − 3y′ + 2y = 5x+ 2
7) y′′ + y = cscx cotx 8) y′′ + y = cotx
9) y′′ − 5y′ + 6y = 2ex 10) y′′ + 4y = sin3 x
Solucione las ecuaciones diferenciales dadas sujetas a las condiciones ini-
ciales propuestas:
11) y′′ − 5y′ + 6y = 2ex; y(0) = 1, y′(0) = 0
12) y′′ − 4y = 4 sinx; y(0) = 4, y′(0) = 0
13) y′′ + 5y′ − 6y = 10e2x; y(0) = 1, y′(0) = 1
14) y′′ + y = 8 cos 2x− 4 sinx; y(π
2) = −1, y′(
π
2) = 0
15) y′′ − 4y′ + 8y = x3; y(0) = 2, y′(0) = 4
16) y′′ − 64y = 16; y(0) = 1, y′(0) = 0
17) y′′ − y = xex; y(0) = 1, y′(0) = 0
18) y′′ + 2y′ − 8y = 2e−2x − e−x; y(0) = 1, y′(0) = 0
Solucione cada una de las ecuaciones diferenciales:
19) y′′ + y = secx 20) y′′ − 9y = 9xe−3x
21) y′′ − 2y′ + 2y = ex secx 22) y′′ + 2y′ + y = e−x lnx
23) y′′ + 3y′ + 2y = ex sinx 24) y′′ − 2y′ + y = ex arctanx

3.9. ECUACIONES LINEALES HOMOGENEAS 101
3.9.2. Ecuaciones diferenciales homogeneas de orden
superior
En general para resolver una ecuacion diferencial de orden n con coeficientes
constantes de la forma
any(n) + an−1y
(n−1) + . . .+ a2y′′ + a1y
′ + a0y = 0 (3.10)
donde an, an−1, . . . , a2, a1 y a0 son constantes.
Podemos suponer como en (3.4) que la funcion u(x) = erx es solucion de
(3.10), entonces, resulta
emx[anrm + an−1r
m−1 + . . .+ a2r2 + a1r + a0] = 0, luego
anrm + an−1r
m−1 + . . .+ a2r2 + a1r + a0 = 0 (3.11)
es decir u(x) = erx es solucion de (3.10), si r es solucion de (3.11). Ahora:
I) si todas las raıces son reales y distintas, la solucion general de (3.10) es
yh = c1er1x + c2e
r2x + . . . + cnernx
II) si las raıces de (3.11) son reales y algunas iguales, digamos que r1 es de
multiplicidad k entonces las funciones
u1(x) = er1x, u2(x) = xer1x, u3(x) = x2er1x, . . . , uk(x) = xk−1er1x
son soluciones de (3.10). Ademas ellas son linealmente independientes, luego
se puede construir la solucion general de (3.10) imitando el proceso de la
solucion (3.4), lo que resulta
yh = c1er1x + c2xe
r1x + . . .+ ckxk−1er1x + ck+1e
r2x + . . .+ cnerix
III) Si las raıces de (3.11) son algunas complejas y de multiplicidad uno
digamos
r1 = α1 + β1i , r2 = α2 + β2i , . . . , rs = αs + βs i
entonces la solucion general de la homogenea (3.10) es
yh = c1eα1x cosβ1x+c2e
α1x sinβ1x+c3eα2x cosβ2x+c4e
α2x sinβ2x+ . . .+

102 CAPITULO 3. ECUACIONES DIFERENCIALES
c2s−1eαsx cosβsx+ c2se
αsx sinβsx+ c2s+1eαs+1x + . . .+ cne
αnx
IV) Si alguna raız es compleja y de multiplicidad k, la solucion general de
(3.10) es
yh = c1eα1x cosβ1x+ c2e
α1x sinβ1x+
c3xeα1x cosβ1x+ c4xe
α1x sinβ1x+ . . .+ c2k−1xk−1eα1x cosβ1x+
c2kxk−1eα1x sinβ1x+ c2k+1e
rk+1x + . . .+ cnerjx
Es posible que la ecuacion (3.11) tenga raıces algunas de ellas repetidas,
ası como algunas complejas repetidas, en este caso combinamos los casos III
y IV.
Ejemplo 3.65. Solucione cada una de las ecuaciones homogeneas siguien-
tes:
I) y(4) + 3y′′′ − 4y′′ = 0.
La ecuacion auxiliar es: m4 + 3m3 − 4m2 = 0, factorizando resulta
m2[m2 + 3m− 4] = m2(m+ 4)(m− 1) = 0.
Las raıces son: r1 = r2 = 0, r3 = −4, r4 = 1
luego la solucion general es: yh = c1 + c2x+ c3e−4x + c4e
x
II) y(4) − y = 0
La ecuacion auxiliar es: m4 − 1 = 0 luego
(m2 − 1)(m2 + 1) = 0, por tanto sus raıces son
r1 = 1, r2 = −1, r3 = i, r4 = −io sea, que la solucion general es:
yh = c1ex + c2e
−x + c3 cosx+ c4 sinx
III) y(5) − 4y(4) + 5y′′′ + 14y′′ − 32y′ + 16y = 0.

3.9. ECUACIONES LINEALES HOMOGENEAS 103
La ecuacion auxiliar es:
m5 − 4m4 + 5m3 + 14m2 − 32m+ 16 = 0
usando el teorema de las raıces racionales y la division sintetica
r1 = r2 = 1, r3 = −2, r4 = 2 + 2i, r5 = 2− 2i
son las soluciones de la ecuacion auxiliar,
por lo tanto la solucion general de la ecuacion homogenea dada es
yh = c1ex + c2xe
x + c3e−2x + c4e
2x cos 2x+ c5e2x sin 2x
Ejercicios 3.66. Encuentre la solucion general de cada una de las ecua-
ciones homogeneas dadas
1) 4y(4) + 3y′′ − 4y = 0 2) y(4) − y′′′ − 7y′′ + y′ + 6y = 0
3) 4y(4) − y′′′ − 20y′′ = 0 4) y(4) + y′′′ + y′′ = 0
5) y(4) − 7y′′ − 18y = 0 6) y(5) − 2y(4) + 17y′′′ = 0
7) y′′′ + 5y′′ = 0 8) y′′′ − 6y′′ + 12y′ − 8y = 0
9) y(5) + 5y(4) − 2y′′′ − 10y′′ + y′ + 5y = 0
10) 2y(5) − 7y(4) + 12y′′′ + 8y′′ = 0
3.9.3. Ecuaciones diferenciales no-homogeneas de orden
superior
Una ecuacion diferencial no homogenea de orden superior es o se puede
escribir en la forma
y(n) + an−1y(n−1) + . . .+ a1y
′ + a0y = f(x) (3.12)
donde an−1, an−2, . . . , a1, a0 son constantes y f(x) es una funcion
definida y continua en algun intervalo I . La ecuacion homogenea es
y(n) + an−1y(n−1) + . . .+ a1y
′ + a0y = 0
y la solucion general de la homogenea es:
yh = c1u1(x) + c2u2(x) + . . . + c1un(x)

104 CAPITULO 3. ECUACIONES DIFERENCIALES
Una solucion particular de (3.12) es de la forma
yp = v1(x)u1(x) + v2(x)u2(x) + . . . + vn(x)un(x)
donde las funciones vi(x) estan por determinar. Usando el metodo visto
para solucionar (3.8) se encuentran las siguientes condiciones:
u1 v′1 + u2 v
′2 + . . . . . .+ un v
′n = 0
u′1 v′1 + u′2 v
′2 + . . . . . .+ u′n v
′n = 0
u′′1 v′1 + u′′2 v
′2 + . . . . . .+ u′′n v
′n = 0
...
u(n−1)1 v′1 + u
(n−1)2 v′2 + . . .+ u(n−1)
n v′n = f(x)
(3.13)
Usando la regla de crammer para solucionar este sistema de n ecuaciones
con n-incognitas se obtiene:
v′1 =W1(x)W (x) , v′2 =
W2(x)W (x) , . . . , v′n = Wn(x)
W (x)
donde,
W (x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
u1 u2 . . . un
u′1 u′2 . . . u′n
......
u(n−1)1 u
(n−1)2 u
(n−1)n
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Wi(x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
u1 u2 . . . 0 . . . un
u′1 u′2 0 u′n
...
u(n−1)1 u
(n−1)2 . . . f(x)
︸︷︷︸
columna i
u(n−1)n
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣

3.9. ECUACIONES LINEALES HOMOGENEAS 105
W (x): wronskiano
luego
v1 =
∫W1(x)
W (x)dx, v2 =
∫W2(x)
W (x)dx, . . . , vn =
∫Wn(x)
W (x)dx
Ahora, la solucion general de (3.12) es como la solucion general de (3.8), es
decir:
yg = yh + yp
Ejemplo 3.67. Encuentre la solucion general de cada una de las siguientes
ecuaciones:
1) y′′′ − 2y′′ − y′ + 2y = e3x
La ecuacion homogenea asociada es
y′′′ − 2y′′ − y′ + 2y = 0
y la ecuacion auxiliar asociada es
m3 − 2m2 −m+ 2 = 0
Las soluciones son: r1 = 1, r2 = −1, r3 = 2
luego la solucion de la ecuacion homogenea es
yh = c1ex + c2e
−x + c3e2x
Ahora,
W (x) =
∣∣∣∣∣∣∣∣∣
ex e−x e2x
ex −e−x 2e2x
ex e−x 4e2x
∣∣∣∣∣∣∣∣∣
= −6e2x

106 CAPITULO 3. ECUACIONES DIFERENCIALES
W1(x) =
∣∣∣∣∣∣∣∣∣
0 e−x e2x
0 −e−x 2e2x
e3x e−x 4e2x
∣∣∣∣∣∣∣∣∣
= e3x(3ex) = 3e4x
W2(x) =
∣∣∣∣∣∣∣∣∣
ex 0 e2x
ex 0 2e2x
ex e3x 4e2x
∣∣∣∣∣∣∣∣∣
= −e3x(e3x) = −e6x
W3(x) =
∣∣∣∣∣∣∣∣∣
ex e−x 0
ex −e−x 0
ex e−x e3x
∣∣∣∣∣∣∣∣∣
= e3x(−2) = −2e3x
luego,
v′1(x) =3e4x
−6e2x = −1
2e2x v1(x) = −
∫1
2e2xdx = −1
4e2x
v′2(x) =−e6x−6e2x =
1
6e4x es decir v2(x) =
∫1
6e4xdx =
1
24e4x
v′3(x) =−2e3x−6e2x =
1
3ex v3(x) =
∫1
3exdx =
1
3ex
y,
yp = −14e
2xex + 124e
4xe−x + 13e
xe2x
yp = −14e
3x + 124e
3x + 13e
3x
yp = (−6+1+8)24 e3x = 3
24e3x = 1
8e3x
y ası
yg = c1ex + c2e
−x + c3e2x + 1
8e3x

3.9. ECUACIONES LINEALES HOMOGENEAS 107
Ejemplo 3.68. Resolver la siguiente ecuacion diferencial
16y(4) − y = ex/2
la que se puede escribir de la siguiente forma
y(4) − 116y = ex/2
16
la ecuacion homogenea es:
y(4) − 116y = 0
su ecuacion auxiliar:
m(4) − 116 = 0, esto es (m2)2 − (14)
2 = 0
entonces
(m2 − 14)(m
2 + 14) = 0, cuyas soluciones son
r1 =12 , r2 = −1
2 , r3 =12 i, r4 = −1
2 i
con estas raıces escribimos las siguientes soluciones:
u1(x) = e12x, u2(x) = e−
12x
u3(x) = cos 12x, u4(x) = sin 1
2x
luego la solucion homogenea es:
yh = c1e12x + c2e
− 12x + c3 cos
12x+ c4 sin
12x
Ahora, la solucion particular se encuentra usando el metodo descrito en
(3.13)
W (x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
e12x e−
12x cos 1
2x sin 12x
12e
12x − 1
2e−12x − 1
2 sin 12x 1
2 cos 12x
14e
12x 1
4e−12x − 1
4 cos 12x − 1
4 sin 12x
18e
12x − 1
8e−12x 1
8 sin 12x − 1
8 cos 12x
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= −1
8

108 CAPITULO 3. ECUACIONES DIFERENCIALES
W (x) = −18
W1(x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
0 e−12x cos 1
2x sin 12x
0 − 12e−
12x − 1
2 sin 12x 1
2 cos 12x
0 14e−
12x − 1
4 cos 12x − 1
4 sin 12x
116e
12x − 1
8e−12x 1
8 sin 12x − 1
8 cos 12x
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= − 1
64
W2(x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
e12x 0 cos 1
2x sin 12x
12e
12x 0 − 1
2 sin 12x 1
2 cos 12x
14e
12x 0 − 1
4 cos 12x − 1
4 sin 12x
18e
12x 1
16e12x 1
8 sin 12x − 1
8 cos 12x
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=ex
64
W3(x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
e12x e−
12x 0 sin 1
2x
12e
12x − 1
2e−12x 0 1
2 cos 12x
14e
12x 1
4e−12x 0 − 1
4 sin 12x
18e
12x − 1
8e−12x 1
16e12x − 1
8 cos 12x
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=

3.9. ECUACIONES LINEALES HOMOGENEAS 109
W3(x) = −e0,5x cos 0,5x
32
W4(x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
e12x e−
12x cos 1
2x 0
12e
12x − 1
2e−12x − 1
2 sin 12x 0
14e
12x 1
4e−12x − 1
4 cos 12x 0
18e
12x − 1
8e−12x 1
8 sin 12x 1
16e12x
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
W4(x) =e0,5x cos 0,5x
32
Entonces
v1 =∫
18dx = 1
8x, v2 = −∫
ex
8 dx = −18e
x
v3 =∫ e
12x sin 1
2x
4 dx = ex2
[cos x
2−sin x
2
4
]
v4 = −∫ e
12x cos 1
2x
4 dx = −ex2
[cos x
2+sin x
2
4
]
luego
yp = 18xe
x/2 + 18e
xe−x/2 + ex2
[cos x
2−sin x
2
4
]
cos x2
−ex2
[cos x
2+sin x
2
4
]
sin x2
yp = ex/2[x8 + 18 ] =
x8e
x/2 + 18e
x/2
y por tanto la solucion general es:
yg = c1ex/2 + c2e
−x/2 + c3 cosx2 + c4 sin
x2 + 1
8xex/2
Nota: En el calculo de las funciones vi, no se escribio la constante de inte-
gracion, pues cuando se calcula la solucion particular va a quedar el resultado
que ya se obtuvo mas unos multiplos de las soluciones ui, y al escribir la
respuesta final se pueden incluir dentro de la solucion de la homogenea.

110 CAPITULO 3. ECUACIONES DIFERENCIALES
Ejercicios 3.69. Encuentre la solucion de cada una de las siguientes ecua-
ciones diferenciales no-homogeneas
1) 2y′′′ − 6y′′ = x2
2) y′′′ − 5y′′ + 6y′ − 2y = 2 sinx+ 8
3) y′′′ − y′′ + y′ − y = xex − e−x + 7
4) y′′′ − 3y′′ + 3y′ − y = ex − x+ 16
5) y(4) − 4y′′ = 5x2 − e2x
6) y(4) − 5y′′ + 42y = 2 coshx− 6
3.10. Aplicaciones de las ecuaciones diferenciales
de segundo orden
3.10.1. Circuitos electricos
Consideremos un circuito L-R-C con una resistencia (R ohms), un inductor
(L Henrys) y un condensador (C Faradios) en serie con una fuerza electro-
motriz que proporciona E(t) voltios. La ley de Kirchhoff dice que la carga
Q del condensador, medida en coulombs, satisface la ecuacion
Ld2Q
dt2+R
dQ
dt+
1
CQ = E(t) (3.14)
La corriente i =dQ
dt, medida en amperes, satisface la ecuacion que se
obtiene al derivar (3.14) con respecto a t, es decir
Ld3Q
dt3+R
d2Q
dt2+
1
C
dQ
dt= E′(t)
Ld2i
dt2+R
di
dt+
1
Ci = E′(t) (3.15)
Ejemplo 3.70. Encuentre la carga Q y la corriente i como funciones del
tiempo en un circuito L-R-C si R = 16Ω, L = 0,02H, C = 2 × 10−4F y
E(t) = 12v, suponga que Q = 0 e i = 0 cuando t = 0.
3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 111
De la ecuacion (3.14) se tiene que
d2Q
dt2+ 800
dQ
dt+ 250000Q = 600
cuya ecuacion auxiliar es:
m2 + 800m+ 250000 = 0
entonces,
m =−800+−
√640,000− 1′000,000
2
y se obtiene:
m1 = −400 + 300 i, m2 = −400− 300 i
luego las soluciones de la ecuacion homogenea son:
u1(x) = e−400t cos 300t, u2(x) = e−400t sin 300t
y una solucion particular de la no-homogenea es:
Qp = 2,4× 10−3
luego, la solucion general esta dada por:
Q(t) = c1e−400t cos 300t+ c2e
−400t sin 300t+ 2,4× 10−3
Como Q(0) = 0, entonces Q(0) = c1 + 2,4× 10−3 = 0 es decir
c1 = −2,4× 10−3. Ademas, como Q′(0) = I(0) = 0, entonces
Q′(t) =− 400c1e−400t cos 300t− 300c1e
−400t sin 300t
− 400c2e−400t sin 300t+ 300c2e
−400t cos 300t
como Q′(0) = 0 entonces, −400c1 + 300c2 = 0
c2 =400
300c1; c2 =
4
32,4× 10−3 c2 =3,2× 10−3
es decir la solucion es
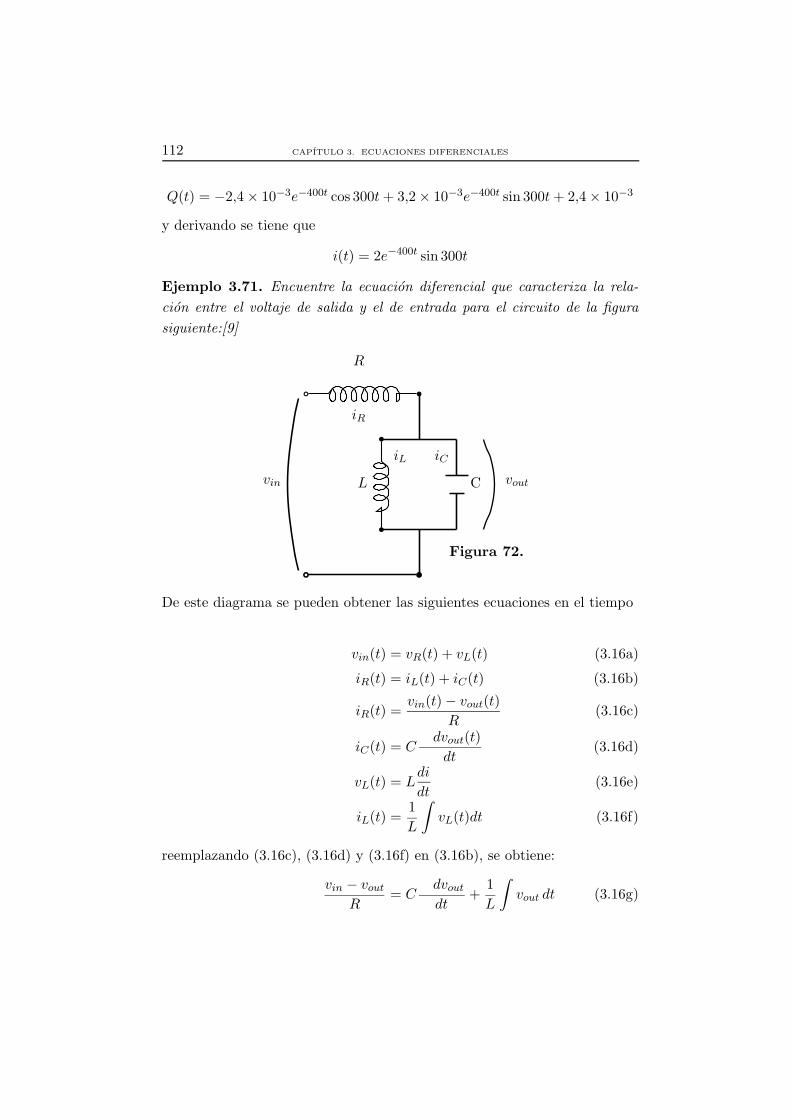
112 CAPITULO 3. ECUACIONES DIFERENCIALES
Q(t) = −2,4× 10−3e−400t cos 300t+ 3,2× 10−3e−400t sin 300t+ 2,4× 10−3
y derivando se tiene que
i(t) = 2e−400t sin 300t
Ejemplo 3.71. Encuentre la ecuacion diferencial que caracteriza la rela-
cion entre el voltaje de salida y el de entrada para el circuito de la figura
siguiente:[9]
vin L C vout
R
iR
iL iC
Figura 72.
De este diagrama se pueden obtener las siguientes ecuaciones en el tiempo
vin(t) = vR(t) + vL(t) (3.16a)
iR(t) = iL(t) + iC(t) (3.16b)
iR(t) =vin(t)− vout(t)
R(3.16c)
iC(t) = Cdvout(t)
dt(3.16d)
vL(t) = Ldi
dt(3.16e)
iL(t) =1
L
∫
vL(t)dt (3.16f)
reemplazando (3.16c), (3.16d) y (3.16f) en (3.16b), se obtiene:
vin − voutR
= Cdvoutdt
+1
L
∫
vout dt (3.16g)

3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 113
Derivando y reorganizando, tenemos:
d2voutdt2
C +dvoutdt
1
R+ vout
1
L=
dvindt
1
R(3.16h)
La ecuacion (3.16h) corresponde a la ecuacion diferencial que caracteriza la
relacion entre el voltaje de entrada y el voltaje de salida.
Definicion 3.72. La funcion de transferencia H(s) de un sistema lineal
es el cociente entre la transformada de Laplace de la funcion de salida y(t)
y la transformada de Laplace de la funcion de entrada g(t), suponiendo
que todas las condiciones iniciales se anulan. Es decir, H(s) =Y (s)
G(s).
La funcion h(t) que es la transformada inversa de Laplace de la funcion
H(s), es decir, h(t) := L−1H(s) es la funcion de respuesta al impulso
para el sistema. Se le llama de esa manera pues describe la solucion al
golpear un sistema masa resorte con un martillo.
Ejemplo 3.73. Encuentre la funcion de transferencia del ejemplo (3.71) y
la ubicacion de la raıces del polinomio caracterıstico.
Partiendo de la ecuacion (3.16g) y aplicando la transformada de Laplace con
condiciones iniciales iguales a cero, tenemos:
VIN (S)− VOUT (S)
R= CSVOUT (S) +
VOUT (S)
LS
VIN (S)− VOUT (S) = RCSVOUT (S) +R
LSVOUT (S)
VIN (S) = VOUT (S)
[
RCS +R
LS+ 1
]
La funcion de transferencia obtenida es:
VOUT (S)
VIN (S)=
SL
S2RLC + SL+R
El polinomio caraterıstico de la funcion de transferencia es
S2RLC+SL+R, cuyas raıces son:
S =−L±
√L2 − 4R2LC
2RLC=−12RC
±
√(
1
4RC
)2
− 1
LC
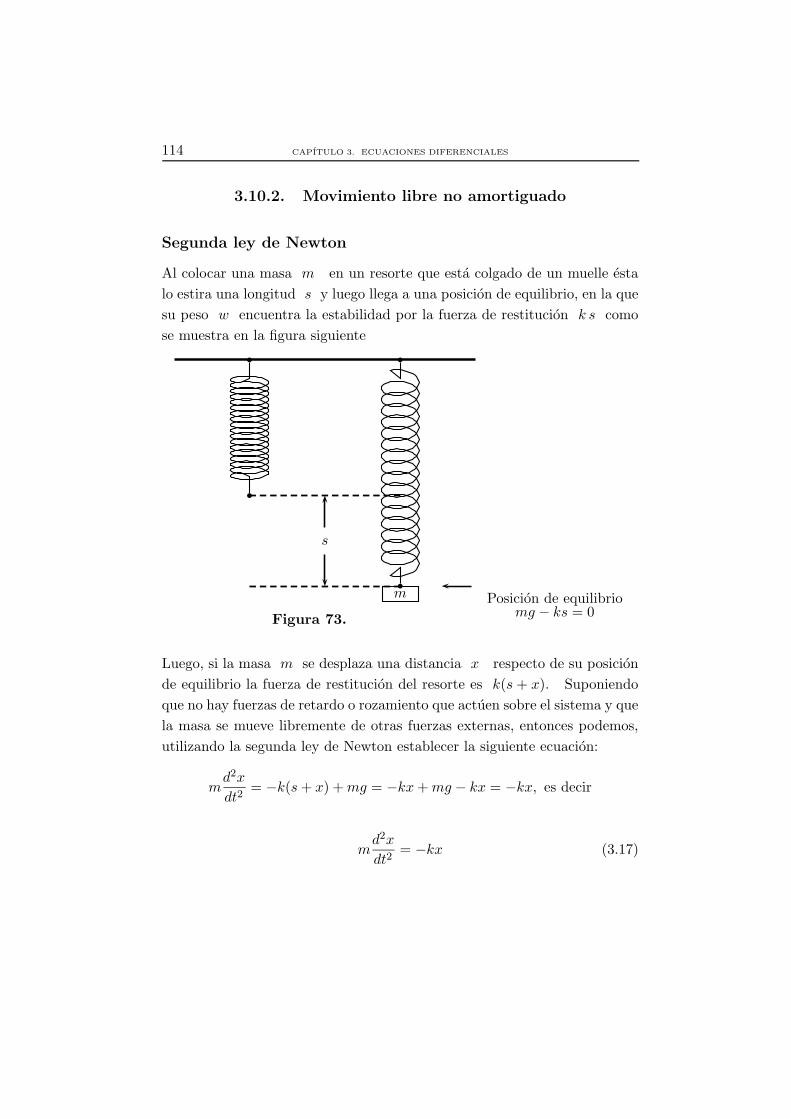
114 CAPITULO 3. ECUACIONES DIFERENCIALES
3.10.2. Movimiento libre no amortiguado
Segunda ley de Newton
Al colocar una masa m en un resorte que esta colgado de un muelle esta
lo estira una longitud s y luego llega a una posicion de equilibrio, en la que
su peso w encuentra la estabilidad por la fuerza de restitucion k s como
se muestra en la figura siguiente
m
s
Figura 73.
Posicion de equilibriomg − ks = 0
Luego, si la masa m se desplaza una distancia x respecto de su posicion
de equilibrio la fuerza de restitucion del resorte es k(s + x). Suponiendo
que no hay fuerzas de retardo o rozamiento que actuen sobre el sistema y que
la masa se mueve libremente de otras fuerzas externas, entonces podemos,
utilizando la segunda ley de Newton establecer la siguiente ecuacion:
md2x
dt2= −k(s+ x) +mg = −kx+mg − kx = −kx, es decir
md2x
dt2= −kx (3.17)
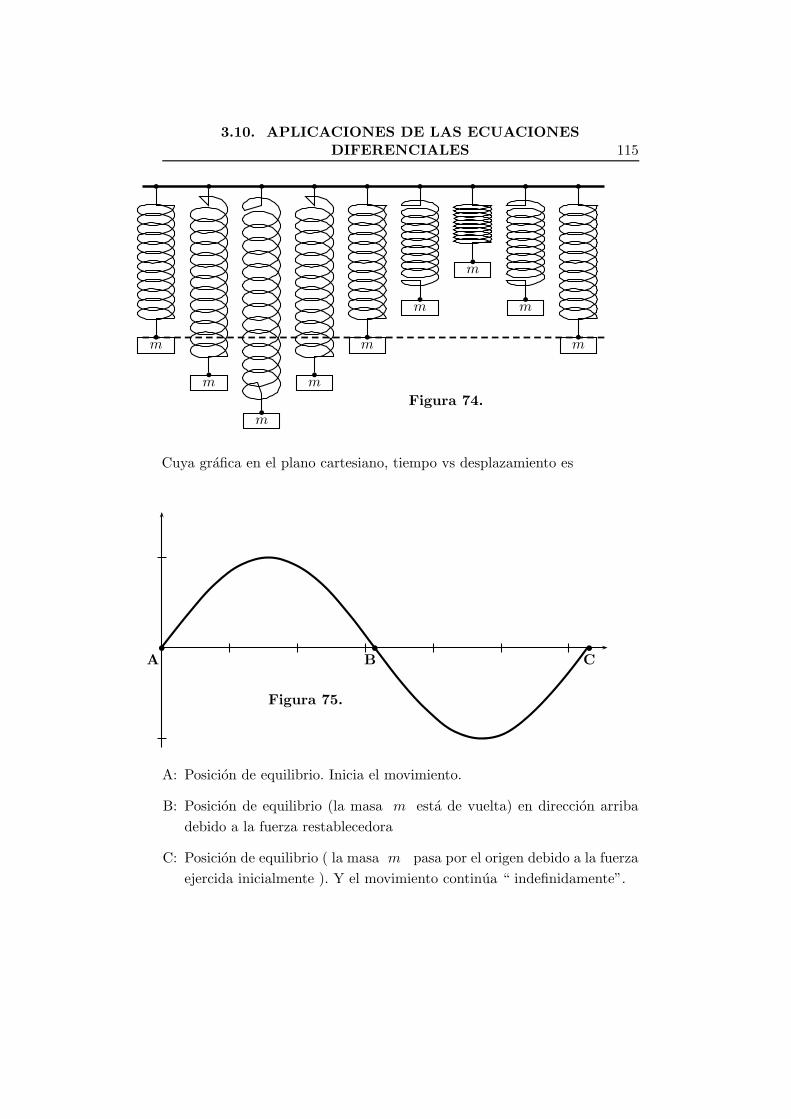
3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 115
m
m
m
m
m
m
m
m
m
Figura 74.
Cuya grafica en el plano cartesiano, tiempo vs desplazamiento es
A• •
B C•
Figura 75.
A: Posicion de equilibrio. Inicia el movimiento.
B: Posicion de equilibrio (la masa m esta de vuelta) en direccion arriba
debido a la fuerza restablecedora
C: Posicion de equilibrio ( la masa m pasa por el origen debido a la fuerza
ejercida inicialmente ). Y el movimiento continua “ indefinidamente”.

116 CAPITULO 3. ECUACIONES DIFERENCIALES
Si en la ecuacion (3.17), de la pagina 114 se divide cada termino por m se
obtiene
d2x
dt2+
k
mx = 0,
Como k y m son positivos, podemos escribir esta ultima ecuacion
d2x
dt2+ w2x = 0, donde w2 =
k
m(3.18)
Se dice que la ecuacion (3.18) describe el movimiento armonico simple m.a.s
o movimiento libre no amortiguado. Las condiciones iniciales asociadas a
la ecuacion diferencial son x(0) = x0 cantidad de desplazamiento inicial
y x′(0) = x1 la velocidad inicial de la masa. Por ejemplo si x0 > 0 y
x1 < 0, la masa parte de un punto abajo de la posicion de equilibrio con
una velocidad x1 dirigida hacia arriba. Cuando x1 = 0, la masa m
parte del reposo, por ejemplo, x0 < 0, x1 = 0, la masa parte del reposo
desde un punto ubicado |x0|, unidades arriba de la posicion de equilibrio.
Se sabe que la ecuacion auxiliar m2+w2 = 0, tiene como soluciones a los
numeros complejos m1 = wi y m2 = −wi, ası la solucion general de la
ecuacion (3.18) es:
x(t) = c1 cos(wt) + c2 sin(wt)
El perıodo de las vibraciones libres que describe la funcion x(t) es 2πw y
la frecuencia w2π .
Ejemplo 3.74. Una masa que pesa 4lb. hace que un resorte estire 10 pul-
gadas. Cuando t=0, la masa se suelta desde un punto que esta a 10 pulgadas
abajo de la posicion de equilibrio con una velocidad inicial, hacia arriba, de45pies/seg. Deduzca la ecuacion del movimiento libre
Como se emplea el sistema tecnico de unidades inglesas, las medidas expre-
sadas en pulgadas se debe expresar en pies sabiendo que 12pulg= 1pie,
entonces 10pulg= 56pies. Ademas se debe convertir las unidades de peso,
que estan en libras, en unidades de masa, sabiendo que m = wg , en este
caso m = 432 = 1
8 slug. Tambien segun la ley de Hook 4 = k 56 , k =
245 lib/pie. Luego la ecuacion (3.17) se convierte en:

3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 117
1
8
d2x
dt2= −24
5x, o
d2x
dt2+
192
5x = 0
Con las condiciones iniciales x(0) = −5
6y x′(0) = −4
5, entonces w2 =
192
5, o sea w =
√
192
5, de modo que la ecuacion diferencial tiene como
solucion general
x(t) = c1 cos
(√
192
5t
)
+ c2 sin
(√
192
5t
)
Como x(0) =5
6, entonces
5
6= c1. Ahora
x′(t) = −√
192
5c1 sin
(√
192
5t
)
+
√
192
5c2 cos
(√
192
5t
)
Como x′(0) = −4
5, entonces −4
5=
√
192
5c2; es decir
c2 = −4√5
5√192
= − 1√60
Luego la ecuacion del movimiento es:
x(t) =5
6cos
(√
192
5t
)
− 1√60
sin
(√
192
5t
)
(3.19)
Otra forma alternativa para x(t). Cuando c1 6= 0 y c2 6= 0 y sabiendo
que sin(α+ β) = sinα cosβ + cosα sinβ podemos hacer A =√
c21 + c22 y
φ un angulo de fase definido ası:
sinφ =c1A
cosφ =c2A
tanφ =
c1c2

118 CAPITULO 3. ECUACIONES DIFERENCIALES
donde,
φ =
arctan
(c1c2
)
, si c1 > 0 y c2 > 0
arctan
(c1c2
)
+ π, si c1 > 0 y c2 < 0
arctan
(c1c2
)
+ π, si c1 < 0 y c2 < 0
arctan
(c1c2
)
+ 2π, si c1 < 0 y c2 > 0
Entonces la ecuacion
x(t) = c1 cos(wt) + c2 sin(wt)
con las anteriores consideraciones se transforma en:
x(t) = A sinφ cos(wt) +A cosφ sin(wt)
x(t) = A[sinφ cos(wt) + cosφ sin(wt)]
x(t) = A sin(wt+ φ)
En la ecuacion (3.19) tenemos A =
√(5
6
)2
+
(1√60
)2
;
A =
√
25
36+
1
60=
√
250 + 6
360=
√
256
360=
16
6√10
;
A =8
3√10
y φ = 1,7244 rad. y ası
x(t) =8
3√10
sin(wt+ 1,7244)
El modelo de movimiento libre armonico para una masa que se esta movien-
do en un resorte no es realista porque el movimiento que describe la ecuacion
(3.17) supone que no hay fuerzas externas que actuen en el sistema lo cual
es cierto solo cuando el sistema este en el vacıo perfecto.
Es por esto que el modelo (3.17) hay que refinarlo, suponiendo que las fuerzas
de amortiguamiento que actuan sobre el cuerpo son directamente propor-
cionales a la velocidad instantanea, es decir, la ecuacion (3.17) se puede

3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 119
modificar escribiendola ası:
md2x
dt2= −kx− β
dx
dt(3.20)
donde β es una constante de amortiguamiento positiva y el signo negativo
es consecuencia del hecho que la fuerza amortiguadora actua en direccion
opuesta a la del movimiento. La ecuacion (3.20) se puede escribir
md2x
dt2+ β
dx
dt+ kx = 0
dividiendo por m (m 6= 0) se obtiene
d2x
dt2+
β
m
dx
dt+
k
mx = 0 (3.21)
comok
m= w2 y si 2λ =
β
mentonces la ecuacion (3.21) se puede escribir
ası
d2x
dt2+ 2λ
dx
dt+ w2 x = 0 (3.22)
ahora la ecuacion auxiliar de (3.22) es
m2 + 2λm+ w2 = 0
esta ultima ecuacion tiene como soluciones
m =−2λ ±
√
(2λ)2 − 4w2
2
m =−2λ ±
√4λ2 − 4w2
2
m = −λ ±√
λ2 − w2
las soluciones son m1 = −λ +√λ2 − w2 y m2 = −λ −
√λ2 − w2
luego podemos distinguir tres casos en forma analoga como en la ecuacion
(3.6).
caso I: λ2 − w2 > 0 en este caso se dice que el sistema esta sobreamor-
tiguado porque el sistema de amortiguamiento, β es grande com-
parado con la constante del resorte. La solucion correspondiente
de (3.22) es
x(t) = e−λt(
c1e√λ2−w2 t + c2e
−√λ2−w2 t
)
(3.23)
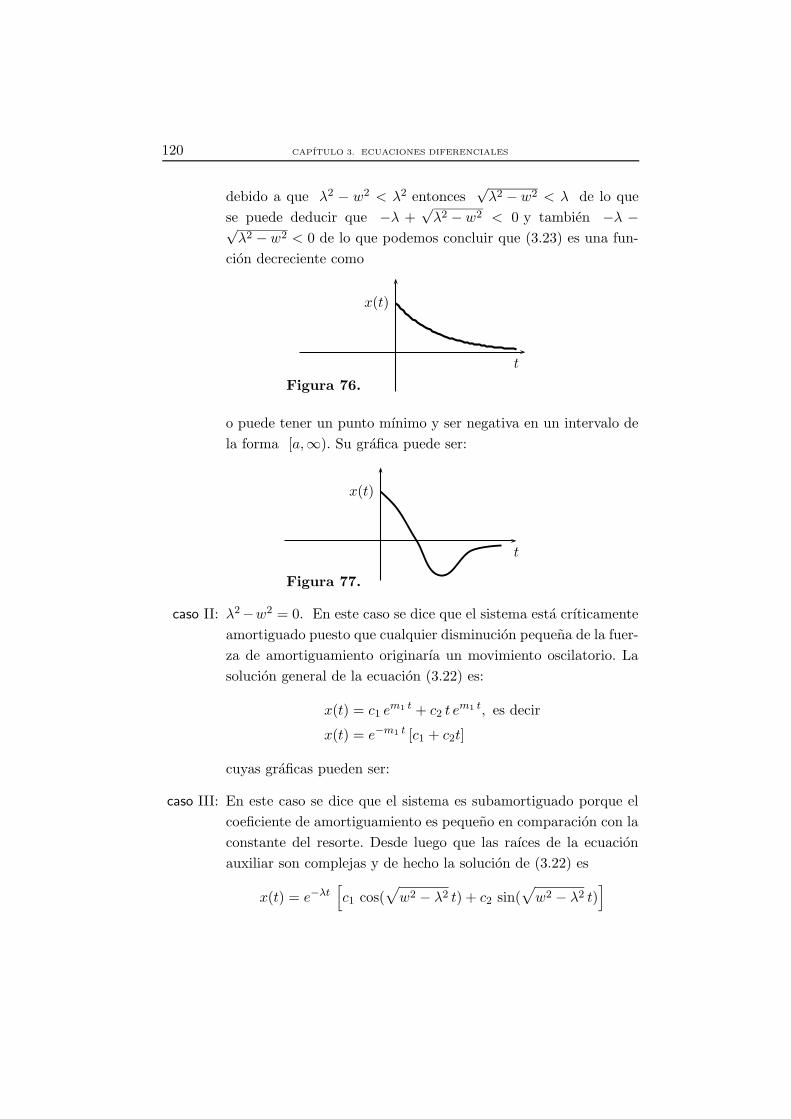
120 CAPITULO 3. ECUACIONES DIFERENCIALES
debido a que λ2 − w2 < λ2 entonces√λ2 − w2 < λ de lo que
se puede deducir que −λ +√λ2 − w2 < 0 y tambien −λ −√
λ2 − w2 < 0 de lo que podemos concluir que (3.23) es una fun-
cion decreciente como
Figura 76.
t
x(t)
o puede tener un punto mınimo y ser negativa en un intervalo de
la forma [a,∞). Su grafica puede ser:
Figura 77.
t
x(t)
caso II: λ2−w2 = 0. En este caso se dice que el sistema esta crıticamente
amortiguado puesto que cualquier disminucion pequena de la fuer-
za de amortiguamiento originarıa un movimiento oscilatorio. La
solucion general de la ecuacion (3.22) es:
x(t) = c1 em1 t + c2 t e
m1 t, es decir
x(t) = e−m1 t [c1 + c2t]
cuyas graficas pueden ser:
caso III: En este caso se dice que el sistema es subamortiguado porque el
coeficiente de amortiguamiento es pequeno en comparacion con la
constante del resorte. Desde luego que las raıces de la ecuacion
auxiliar son complejas y de hecho la solucion de (3.22) es
x(t) = e−λt[
c1 cos(√
w2 − λ2 t) + c2 sin(√
w2 − λ2 t)]
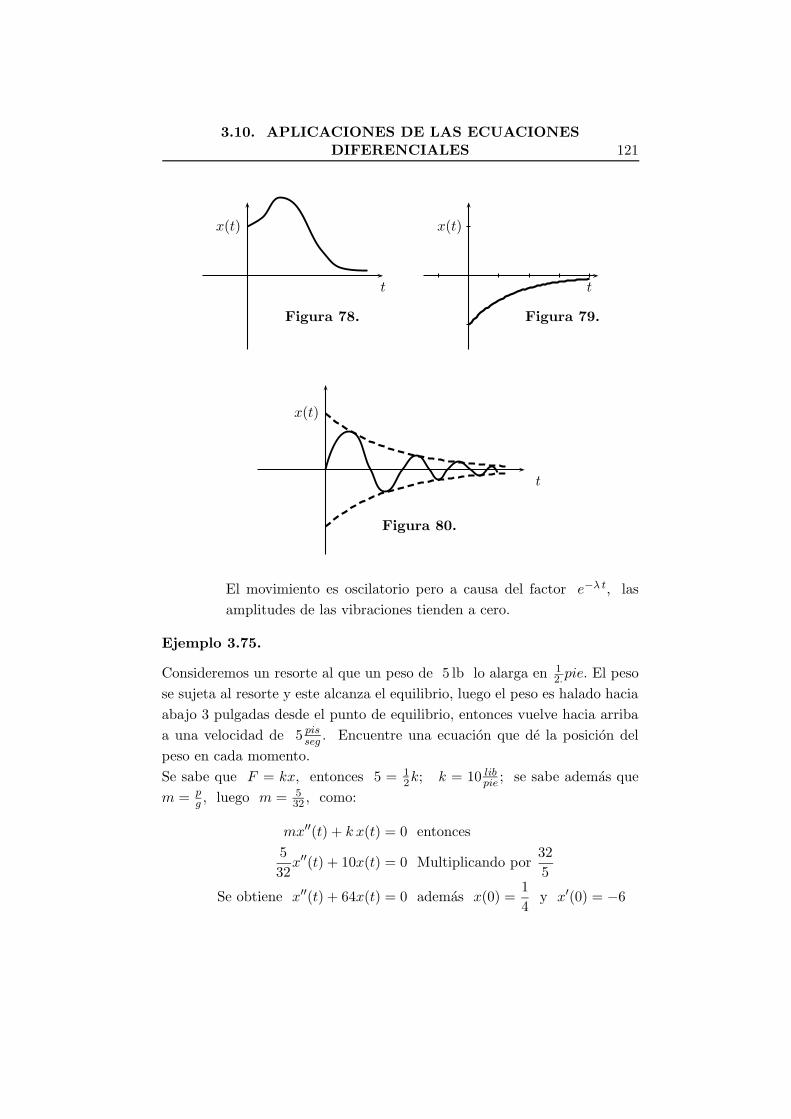
3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 121
Figura 78.
t
x(t)
Figura 79.
t
x(t)
Figura 80.
t
x(t)
El movimiento es oscilatorio pero a causa del factor e−λ t, las
amplitudes de las vibraciones tienden a cero.
Ejemplo 3.75.
Consideremos un resorte al que un peso de 5 lb lo alarga en 12.pie. El peso
se sujeta al resorte y este alcanza el equilibrio, luego el peso es halado hacia
abajo 3 pulgadas desde el punto de equilibrio, entonces vuelve hacia arriba
a una velocidad de 5 pisseg . Encuentre una ecuacion que de la posicion del
peso en cada momento.
Se sabe que F = kx, entonces 5 = 12k; k = 10 lib
pie ; se sabe ademas que
m = pg , luego m = 5
32 , como:
mx′′(t) + k x(t) = 0 entonces
5
32x′′(t) + 10x(t) = 0 Multiplicando por
32
5
Se obtiene x′′(t) + 64x(t) = 0 ademas x(0) =1
4y x′(0) = −6

122 CAPITULO 3. ECUACIONES DIFERENCIALES
La ecuacion auxiliar es m2 + 64 = 0 luego
m1 = 8i, m2 = −8i es decir que la solucion es
x(t) = c1 cos(8t) + c2 sin(8t) como
x(0) =1
4,
1
4= c1
ahora x′(t) = −8c1 sin(8t) + 8c2 cos(8t)
x′(0) = 6, −6 = 8c2, c2 = −3
4
Y ası la ecuacion que da la posicion del cuerpo en cada instante es:
x(t) =1
4cos(8t)− 3
4sin(8t)
Ejemplo 3.76.
Un resorte es alargado 3 pul por un peso de 10 lb, suponga que el peso es
halado 4 pul abajo de la posicion de equilibrio. Se le imprime una velocidad
inicial de 5 pisseg . Encuentre la ecuacion que describe el movimiento en cada
instante.
F = kx; 2 =1
4k, k = 8
lb
pie
ahora mx′′(t) + λx(t) = 0, entonces
2
32x′′(t) + 8x(t) = 0
Es decir que la ecuacion diferencial del sistema es:
x′′(t) + 128x(t) = 0, x(0) =1
3, x′(0) = 5
la ecuacion auxiliar es
m2 + 128 = 0 y las soluciones de esta son
m1 = 8√2i, m2 = −8
√2i
luego la solucion general es
x(t) = c1 cos(8√2 t) + c2 sin(8
√2 t)

3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 123
como x(0) =1
3, entonces c1 =
1
3, ahora
x′(t) = −c18√2 sin(8
√2 t) + c28
√2 cos(8
√2 t)
y como x′(0) = 5, entonces c2 =5
8√2
y la ecuacion que describe el movimiento es:
x(t) =1
3cos(8
√2 t) +
5
8√2sin(8
√2 t)
Ejemplo 3.77.
A cierto resorte un peso de 8 lb lo alarga 6 pul. Suponga que al resorte
se le sujeta un peso de 4lb y despues se lleva 2 pulgadas arriba de la
posicion de equilibrio, para luego soltarlo con una velocidad negativa de
15 pulseg . ¿Cuando llegara a su punto mas bajo por primera vez?
Tenemos F = kx; 8 =1
2k; luego k = 16
lb
pie
ahora mx′′(t) + k x(t) = 0 entonces
4
32x′′(t) + 16x(t) = 0 entonces
x′′(t) + 128x(t) = 0 , x(0) =1
6; x′(0) = −15pies
seg
Luego la solucion general de la ecuacion es:
x(t) = c1 cos(8√2t) + c2 sin(8
√2t)
Como x(0) = −1
6; y x′(0) = −15 Entonces
c1 = −1
6y c2 = −
15
8√2
Luego la ecuacion que da la posicion en cada instante es:
x(t) = − 1
16cos(8
√2t)− 15
8√2sin(8
√2t) (3.24)
La amplitud es
A =
√(
−1
6
)2
+
(
− 15
8√2
)2
A =
√
1
36+
225
128

124 CAPITULO 3. ECUACIONES DIFERENCIALES
A =
√
2153
1152=
46,4
33,9A = 1,3670
Esto quiere decir que el cuerpo oscila 1.3670 pies hacia arriba y 1.3670 pies
hacia abajo. La ecuacion (3.24) se puede escribir ası:
x(t) = 1,3670 sin(8√2 t+ 3,2666)
El espacio recorrido hasta llegar al punto mas bajo:
−1,3670 = 1,3670 sin(8√2 t+ 3,2666)
−1 = sin(8√2 t+ 3,2666) Entonces
8√2 t+ 3,2666 = 4,7123 es decir
8√2 t = 1,6973
t = 0,127 seg
Luego el espacio recorrido para alcanzar la posicion de equilibrio desde el
punto mas alto es 0.127 seg. Ahora, el tiempo necesario para alcanzar la
posicion mas alta desde el sitio donde fue lanzado es:
1,2003 = 1,3670 sin(8√2t+ 3,2666) es decir
t ∼= 0,10
Luego el tiempo total para alcanzar el punto mas bajo es 0.35 seg aproxi-
madamente.
Ejercicios 3.78.
1. Encuentre una solucion particular de la ecuacion diferencial ip (ip
corriente estacionaria)
Ld2i
dt2+R
di
dt+
1
Ci = E(t)∗
si L = 1H; R = 2Ω; C = 0,25F ; E(t) = 50 cos t v
2. Un circuito L-R-C en serie contiene L = 12H, R = 10Ω, C = 1
100F
y E(t) = 150 v. Determine la carga instantanea q(t) en el capaci-
tor para t > 0, si q(0) = 1 e i(0) = 0. ¿cual es la carga en el
condensador despues de un tiempo largo?
3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 125
3. Encuentre la corriente i(t) para un circuito L-R-C en serie si L =
3,5H, R = 1000Ω, C = 2× 10−6 F y E(t) = 120 sin(377t)v.
4. Un resorte es alargado 8 pulgadas por un peso de 5 lb, suponga que
el peso es llevado 6 pul abajo de la posicion de equilibrio, donde se
imprime una velocidad hacia abajo de 10 pieseg .
a) Encuentre una ecuacion que describa el movimiento.
b) ¿Cual es la amplitud de dicho movimiento?
c) ¿Cual es su angulo de desfase?
5. Un resorte es alargado 1 pie por un peso de 15 lb, suponga que
el peso es llevado 6 pul abajo de la posicion de equilibrio, donde se
imprime una velocidad de 10 pieseg .
a) Encuentre una ecuacion que describa el movimiento.
b) ¿Cual es la amplitud de dicho movimiento?
6. A un resorte que es alargado 6 pulgadas por un peso de 5 lb, se le pega
una pesa de 10 lb, luego de alcanzar la posicion de equilibrio, se lleva 8
pulgadas arriba de la posicion de equilibrio donde se le imprime una
velocidad de −5 pieseg . ¿Cual es la ecuacion que describe el movimiento?
7. Resuelva el ejercicio anterior si la velocidad es de 5 pieseg .
8. Resuelva el ejercicio 3 si la pesa de 10 lb se lleva 18 pulgadas debajo de
la posicion de equilibrio, en donde se libera imprimiendo una velocidad
de −5 pieseg .
Ejemplos de movimientos amortiguados
Ejemplo 3.79.
A cierto resorte un peso de 4 lb lo alarga 0.64 pies, luego el peso es llevado13 pie por arriba de la posicion de equilibrio, luego inicia el descenso a una
velocidad de 5 pieseg . El movimiento se efectua en un medio que imprime una

126 CAPITULO 3. ECUACIONES DIFERENCIALES
fuerza de amortiguamiento de 14 de su velocidad. Encuentre la ecuacion
que describe la posicion del cuerpo en el instante t.
F = kx; 4 = 0,64 ∗ k; k =4
0,64, k = 6,25
Luego la ecuacion diferencial que describe el movimiento es:
mx′′(t) +1
4x′(t) + 6,25x(t) = 0
4
32x′′(t) +
1
4x′(t) + 6,25x(t) = 0
x′′(t) + 2x′(t) + 50x(t) = 0
la ecuacion auxiliar es
m2 + 2m+ 50 = 0 y sus raıces son
m =−2±
√4− 200
2,
m1 = −1 + 7i y m2 = −1− 7i la solucion es
x(t) = c1 e−t cos(7t) + c2 e
−t sin(7t) como
x(0) =1
3, entonces c1 = −1
3ahora
x′(t) = e−t[c1 cos(7t) + c2 sin(7t)] + e−t[−7c1 sin(7t) + c27 cos(7t)]
x′(t) = e−t[c1 cos(7t)− 7c1 sin(7t) + c2 sin(7t) + 7c2 cos(7t)]
como x′(0) = 5 Entonces 5 = c1 + 7c2; luego
c2 =5− 1/3
7=
14/3
7=
2
3,
luego la ecuacion que describe el movimiento es:
x(t) = −1
3e−t cos(7t) +
2
3e−t sin(7t)

3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 127
Ejemplo 3.80.
Un resorte es alargado 4 pulgadas por un peso de 2 lb. El peso baja desde el
punto de equilibrio a una velocidad positiva de 12 pieseg . Si la resistencia del aire
opone una fuerza de magnitud 0.02 la velocidad, describa el movimiento.
F = kx; 2 =1
3k; k = 6, luego
mx(t) +2
100x(t) + 6x(t) = 0
2
32x(t) +
2
100x(t) + 6x(t) = 0
x(t) + 0,32x(t) + 96x(t) = 0
La ecuacion auxiliar es
m2 + 0,32m+ 96 = 0
Las soluciones de dicha ecuacion son:
m =−0,32±
√
(0,32)2 − 4,96
2
m1 =−0,32 + 19,59i
2y m2 =
−0,32− 19,59i
2
entonces
x(t) = c1e−0,32t cos(19,59t) + c2e
−0,32t sin(19,559t)
como
x(0) = 0 , entonces c1 = 0 y ası
x(t) = c2e−0,32t sin(19,59 t) entonces
x(t) = c2[e−0,32 t sin(19,59 t) + e−0,32t19,59 cos(19,59 t)
]
Ahora
x(0) = 12 , entonces
128 CAPITULO 3. ECUACIONES DIFERENCIALES
12 = 19,59 c2; c2 =12
19,59= 0,612
de esta forma
x(t) = 0,612e−0,32t sin(19,59 t)
Ejercicios 3.81.
1. Un resorte es alargado 0.4 pies por un peso de 4 lb. El peso se sujeta
al resorte y se permite que el sistema alcance el equilibrio, entonces
se imprime al peso una velocidad hacia arriba de 2 pieseg . Suponga que
el movimiento se efectua en un medio que se opone una fuerza de
magnitud igual a la velocidad del peso en movimiento. Determine la
posicion del peso como funcion del tiempo.
2. Resuelva el ejercicio anterior si despues de alcanzar el equilibrio el peso
se lleva 6 pulgadas arriba de este.
3. Resuelva el primer ejercicio si despues que el peso alcanza el equilibrio
se lleva a una posicion de 6 pulgadas abajo de la posicion de equilibrio
y se imprime una velocidad de 2 piesseg .
4. Un resorte es alargado 10 pulgadas por un peso de 4 lb. El peso sube
10 pulgadas abajo del punto de equilibrio a una velocidad de 8 pieseg .
Si un medio resistente opone una fuerza de retardo de magnitud 14 de
la magnitud de la velocidad, describa el movimiento.
5. Resuelva el ejercicio anterior si la fuerza de resistencia del medio es
igual a la magnitud de su velocidad.
6. Resuelva el ejercicio 4 si la fuerza de resistencia del movimiento es 2
veces la magnitud de su velocidad.
7. Un resorte es alargado 6 pulgadas por un peso de 8 lb. El peso es
llevado 8 pulgadas abajo del punto de equilibrio y de allı parte con
una velocidad inicial hacia arriba de 7 pieseg . Suponiendo que existe
una fuerza de amortiguamiento igual a tres veces la magnitud de su
velocidad, describa el movimiento.

3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 129
8. Resuelva el ejercicio anterior si el cuerpo se lleva 8 pulgadas arriba del
punto de equilibrio y la velocidad que se le imprime es de 7 pieseg hacia
abajo.
9. Una masa de 1Kg esta unida a un resorte cuya constante es 16 lbpie y to-
do el sistema se sumerge en un lıquido que imparte una fuerza de amor-
tiguacion numericamente igual a 10 veces la velocidad instantanea.
Formule la ecuacion del movimiento si:
a) El contrapeso se suelta partiendo del reposo a 1 pie bajo la posi-
cion de equilibrio.
b) El contrapeso se suelta 1 pie abajo de la posicion de equilibrio
con una velocidad de 12 piesseg hacia arriba.
Sistema masa-resorte: movimiento forzado
El sistema masa resorte que se ha trabajado hasta el momento supone que
el resorte esta colgando fijo a un soporte. Ahora, si se supone que al soporte
se somete a un movimiento externo al sistema, el modelo en la ecuacion
diferencial sera
md2x
dt2+ β
dx
dt+ λx(t) = f(t)
donde f(t) representa la fuerza oscilatoria del soporte del resorte. Al dividir
la ecuacion anterior por m se obtiene
d2x
dt2+
β
m
dx
dt+
λ
mx(t) =
f(t)
m
la cual se puede escribir
d2x
dt2+ 2λ
dx
dt+ w2 x(t) = F (t)
siendo F (t) =f(t)
m, 2λ =
β
my w2 =
λ
m

130 CAPITULO 3. ECUACIONES DIFERENCIALES
Ejemplo 3.82. Un peso de 16 lb estira 8/3 pies un resorte. Al principio
en contrapeso parte del reposo a 2 pies abajo de la posicion de equilibrio y el
movimiento ocurre en un medio que presenta una fuerza de amortiguamiento
numericamente igual a la mitad de la magnitud de la velocidad. Deduzca
la ecuacion del movimiento si el contrapeso esta impulsado por una fuerza
externa igual a f(t) = 10 cos(3t).
F = k x 16 = 8/3 k k = 6lb
pie
ademas x(0) = 2 y x′(0) = 0. ahora, como
mx′′(t) + β x′(t) + λx(t) = 10 cos(3t), entonces
16
32x′′(t) +
1
2x′(t) + 6x(t) = 10 cos(3t)
1
2x′′(t) +
1
2x′(t) + 6x(t) = 10 cos(3t) luego
x′′(t) + x′(t) + 12x(t) = 20 cos(3t),
Lx′′(t) + x′(t) + 12x(t) = L20 cos(3t),
Lx′′(t)+ Lx′(t)+ 12Lx(t) = 20s
s2 + 9,
s2X(s)− 2s− 0 + sX(s)− 2 + 12X(s) =20s
s2 + 9,
X(s)[s2 + s+ 12] = 2s+ 2 +20s
s2 + 9
X(s) =2(s+ 1)
s2 + s+ 12+
20s
(s2 + 9)(s2 + s+ 12)
X(s) =2s
s2 + s+ 12+
2
s2 + s+ 12+
20s
(s2 + 9)(s2 + s+ 12)
X(s) =2s
(s+ 12)
2 + 474
+2
(s+ 12)
2 + 474
+As+B
s2 + 9+
Cs+D
s2 + s+ 12
X(s) =2(s+ 1/2)
(s+ 12)
2 + 474
+1
(s+ 12)
2 + 474
+(10/3)s+ 10
s2 + 9+
(−10/3)s− 40/3
s2 + s+ 12
X(s) =2(s+ 1/2)
(s+ 12)
2 + 474
+1
(s+ 12)
2 + 474
+(10/3)s
s2 + 9+
10
s2 + 9−
(10/3)(s+ 1/2)
(s+ 12)
2 + 474
− 35/3
(s+ 12)
2 + 474

3.10. APLICACIONES DE LAS ECUACIONESDIFERENCIALES 131
aplicando la transformada inversa se tiene
x(t) = 2 e−t/2 cos
(√47
2t
)
+2√47
e−t/2 sin
(√47
2t
)
+10
3cos(3 t)+
10
3sin(3 t)− 10
3e−t/2 cos
(√47
2
)
− 35
3
2√47
e−t/2 cos
(√47
2t
)
x(t) = −4
3e−t/2 cos
(√47
2t
)
−
64
3√47
e−t/2 sin
(√47
2t
)
+10
3(cos(3 t) + sin(3t))
Ejercicios 3.83.
1. Cuando una masa de 10 lb se cuelga a un resorte lo estira 2 pies y
llega al reposo en su posicion de equilibrio. A partir de t = 0 se apli-
ca una fuerza externa al sistema igual a f(t) = 6 sin(2t). Formule la
ecuacion del movimiento si el medio presenta una fuerza amortiguado-
ra numericamente igual a 8 veces la magnitud de su velocidad.
2. En el problema anterior, deduzca la ecuacion del movimiento si la
fuerza externa es de f(t) = e−t sin(4t).
3. Cuando una masa de 4 lb se cuelga a un resorte cuya constante es
32 lbpie llega a la posicion de equilibrio. A partir de t = 0 se aplica al
sistema una fuerza igual a f(t) = 68 e−2t cos(4t). Deduzca la ecuacion
del movimiento cuando no hay amortiguamiento.
4. Resuelva el problema anterior si la fuerza de amortiguamiento es nume-
ricamente igual a dos veces la magnitud de la velocidad instantanea

132 CAPITULO 3. ECUACIONES DIFERENCIALES
3.11. Ecuaciones diferenciales de orden superior
3.11.1. Con coeficientes variables
Definicion
Una ecuacion diferencial de orden superior y con coeficientes variables es de
la forma:
an(x)y(n) + an−1(x)y
(n−1) + . . .+ a1(x)y′ + a0(x)y = f(x)
donde las funciones ai(x), i = 1, 2, . . . , n y f(x) estan definidas y son
continuas en un intervalo I.
Un caso particular de dichas ecuaciones lo constituye las llamadas ecuaciones
de Cauchy-Euler aquı
an(x) = anxn, an−1(x) = an−1x
n−1, . . . , a1(x) = a1 x, a0(x) = a0
y f(x) es cualquier funcion definida y continua en un intervalo I
En principio estudiaremos la solucion de la ecuacion de segundo orden ho-
mogenea es decir la ecuacion de la forma
ax2y′′ + bxy′ + cy = 0 (3.25)
Supongamos que una solucion de la ecuacion (3.25) es de la forma y = xm
entonces y′ = mxm−1 y y′′ = m(m− 1)xm−2 entonces
ax2m(m− 1)xm−2 + bxmxm−1 + cxm = 0
am(m− 1)xm + bmxm + cxm = 0
xm[am(m− 1) + bm+ c] = 0, como xm 6= 0 entonces
am2 − am+ bm+ c = 0
am2 + (b− a)m+ c = 0
es decir que y = xm es una solucion de (3.25) si y solo si m es una raız de
la ecuacion llamada auxiliar:
am2 + (b− a)m+ c = 0 (3.26)
esta es una ecuacion cuadratica de la cual podemos esperar:
a) que tenga dos raıces reales y distintas m1 y m2 en cuyo caso la ecuacion
(3.25) tiene la solucion general:
3.11. ECUACIONES DIFERENCIALES DE ORDENSUPERIOR 133
yh = c1xm1 + c2x
m2
b) que tenga una raız m real de multiplicidad dos (tiene raıces iguales). Se
puede probar que u1 = xm y u2 = xm lnx son dos soluciones linealmente
independientes y que por tanto la solucion general de (3.25) es:
yh = c1xm + c2x
m lnx
c) que tenga dos raıces complejas la una conjugada de la otra, digamos:
m1 = α + β i y m2 = α − β i en este caso u1 = xα cos(β lnx) y
u2 = xα sin(β lnx) son dos soluciones linealmente independientes, luego
se concluye que la solucion general es:
yh = c1xα cos(β lnx) + c2x
α sin(β lnx)
Ejemplo 3.84. Resolver cada una de las siguientes ecuaciones diferenciales
I) x2y′′ − 2y = 0
Aquı a = 1, b = 0, c = −2 . Entonces la ecuacion auxiliar es:
m2 −m− 2 = 0, las soluciones de esta ecuacion son: m1 = 2 y m2 = −1,entonces u1 = x2 y u2 = x−1 son soluciones linealmente independientes
como puede verse facilmente, y en consecuencia la solucion general es:
yh = c1x2 + c2x
−1
II) x2y′′ + xy′ + 4y = 0
Aquı a = 1, b = 1, c = 4 . La ecuacion auxiliar es: m2 + 4 = 0 cuyas
raıces son m1 = −2i y m2 = 2i. luego u1 = cos(2 lnx) y u2 = sin(2 lnx)
son soluciones, ademas linealmente independientes (pruebese) y la solucion
general es:
yh = c1 cos(2 lnx) + c2 sin(2 lnx)

134 CAPITULO 3. ECUACIONES DIFERENCIALES
III) x2y′′ + 5xy′ + 4y = 0
Aquı a = 1, b = 5, c = 4 . La ecuacion auxiliar es: m2 + 4m + 4 = 0
cuyas raıces son m1 = −2 y m2 = −2 (repetidas). u1 = x−2 y u2 =
x−2 lnx son las soluciones de la ecuacion dada (pruebe que son linealmente
independientes) y la solucion general es:
yh = c1x−2 + c2x
−2lnx
Ejercicios 3.85.
I) Encuentre la solucion de cada una de las ecuaciones diferenciales dadas
1) x2y′′ − 5y = 0 2) x2y′′ + 3xy′ + y = 0
3) x2y′′ + 4xy′ + 2y = 0 4) 3x2y′′ + 7xy′ + 4y = 0
5) 2x2y′′ + xy′ + y = 0 6) x2y′′ − 5xy′ + 8y = 0
7) 3x2y′′ − 7xy′ − 24y = 0 8) x2y′′ + xy′ + y = 0
9) x2y′′ + 11xy′ + y = 0
II) Resuelva cada una de las siguientes ecuaciones diferenciales sujetas a las
condiciones iniciales indicadas
1) x2y′′ + 3xy′ = 0 y(1) = 0 y′(1) = 4
2) x2y′′ − 5xy′ + 8y = 0
3) x2y′′ + xy′ + y = 0 y(1) = 1 y′(1) = 2
3.11.2. Ecuaciones de segundo orden no-homogeneas
Estas ecuaciones son de la forma
ax2y′′ + bxy′ + cy = f(x) (3.27)
donde a, b y c son constantes con a 6= 0 y f(x) es una funcion definida
y continua en un intervalo I. Entonces la solucion general como en (3.8)
sera yg = yh+ yp donde yh se calcula como en (3.25) y yp se calcula por

3.11. ECUACIONES DIFERENCIALES DE ORDENSUPERIOR 135
variacion de parametros teniendo en cuenta que se debe escribir (3.27) de la
forma
y′′ +b
axy′ +
c
ax2y =
f(x)
ax2
Podemos escribir F (x) =f(x)
ax2y concluir que yp = u1v1 + u2v2 donde,
v1 = −∫
u2F (x)
W (u1, u2)dx, y v2 =
∫u1F (x)
W (u1, u2)dx
Ejemplo 3.86. Solucionar la ecuacion diferencial
x2y′′ + 10xy′ + 8y = x2
La ecuacion homogenea es:
x2y′′ + 10xy′ + 8y = 0
y la ecuacion auxiliar es:
m2 + 9m+ 8 = 0
cuyas soluciones son: m1 = −8 y m2 = −1, luego u1 = x−8 y u2 = x−1
son soluciones de la homogenea. Ahora F (x) = 1, W (x−8, x−1) = 7/x10
v1 = −1
7
∫
x−1x10 dx = −1
7
∫
x9dx = − 1
70x10
v2 =1
7
∫
x−8x10 dx =1
7
∫
x2dx =1
21x3 luego,
yp = − 1
70x−8x10 +
1
21x3x−1 = − 1
70x2 +
1
21x2
=−3x2 + 10x2
210=
1
30x2
y ası la solucion general es:
yg =c1x3
+c2x
+x2
30

136 CAPITULO 3. ECUACIONES DIFERENCIALES
Ejercicios 3.87. Resuelva las siguientes ecuaciones diferenciales:
1) x2y′′ − 4xy′ + 6y = lnx2 2) x2y′′ − 6y = x2ex
3) x2y′′ − 4xy′ + 6y = x2 4) x2y′′ − 8xy′ − 6y = 5x4
5) x2y′′ − 3xy′ + 3y = 5x6 6) x2y′′ + 3xy′ − 15y = 7x−4
7) x2y′′ + 4xy′ + 2y = x lnx
3.12. Sistemas de Ecuaciones Diferenciales
Otra de las utilidades de la transformada de Laplace es la solucion de sis-
temas de ecuaciones diferenciales lineales con condiciones iniciales.
Desarrollaremos solamente el tema de las ecuaciones diferenciales con condi-
ciones iniciales, pues la solucion de sistemas de ecuaciones diferenciales line-
ales mas generales usa los conceptos de valores y vectores propios y es muy
probable que en Algebra Lineal no se haya alcanzado a desarrollar dichos
temas. Invitamos a nuestros lectores que esten interesados en estos temas
consultar cualquier libro de ecuaciones diferenciales de los que estan en nues-
tras referencias bibliograficas.
A continuacion desarrollaremos dos ejemplos de sistemas de ecuaciones dife-
renciales
Ejemplo 3.88. Solucionar cada uno de los siguientes sistemas de ecua-
ciones diferenciales lineales con condiciones iniciales, usando la transfor-
mada de Laplace.
1.
dx
dt= x− y; x(0) = 0 y(0) = 2
dy
dt= 2x+ y
Tomando transformada de Laplace a cada lado de las dos ecuaciones
se obtiene

3.12. SISTEMAS DE ECUACIONES DIFERENCIALES 137
Ldxdt = L x− y
Ldydt = L2x+ y
sX(s)− x(0) = X(s)− Y (s)
sY (s)− y(0) = 2X(s) + Y (s)
es decir
sX(s) = X(s)− Y (s)
sY (s)− 2 = 2X(s)− Y (s)
luego
(s− 1)X(s) + Y (s) = 0
−2X(s) + (s+ 1)Y (s) = 2
Usando el metodo de Cramer, se obtiene
X(s) =
∣∣∣∣∣
0 1
2 s+ 1
∣∣∣∣∣
∣∣∣∣∣
s− 1 1
−2 s+ 1
∣∣∣∣∣
Y (s) =
∣∣∣∣∣
s− 1 0
−2 2
∣∣∣∣∣
∣∣∣∣∣
s− 1 1
−2 s+ 1
∣∣∣∣∣
X(s) =−2
s2 + 1Y (s) =
2(s− 1)
s2 + 1
usando la transformada inversa de Laplace a cada lado se obtiene

138 CAPITULO 3. ECUACIONES DIFERENCIALES
L−1X(s) = L−1
−2s2 + 1
y
L−1Y (s) = L−1
2s− 2
s2 + 1
es decir
x(t) = −2 sin ty(t) = 2 cos t− 2 sin t
2.
d2x
dt2= −x+ y, x(0) = y(0) = 0
d2y
dt2= x− y x‘(0) = −2, y‘(0) = 1
tomando transformada de Laplace a los dos lados de cada ecuacion se ob-
tiene:
L
d2x
dt2
= L−x+ y
L
d2y
dt2
= Lx− y
Es decir
s2X(s)− sx(0)− x′(0) = −X(s) + Y (s)
s2Y (s)− sy(0)− y′(0) = X(s)− Y (s)
reemplazando valores tenemos:
s2X(s) + 2 = −X(s) + Y (s)
s2Y (s)− 1 = X(s)− Y (s)
luego,
(s2 + 1)X(s)− Y (s) = −2−X(s) + (s2 + 1)Y (s) = 1

3.12. SISTEMAS DE ECUACIONES DIFERENCIALES 139
usando la regla de Cramer se obtiene:
X(s) =
∣∣∣∣∣
−2 −11 s2 + 1
∣∣∣∣∣
∣∣∣∣∣
s2 + 1 −1−1 s2 + 1
∣∣∣∣∣
Y (s) =
∣∣∣∣∣
s2 + 1 −2−1 1
∣∣∣∣∣
∣∣∣∣∣
s2 + 1 −1−1 s2 + 1
∣∣∣∣∣
Es decir
X(s) =−2s2 − 1
s4 + 2s2Y (s) =
s2 − 1
s4 + 2s2
X(s) =−2
s2 + 2− 1
s2(s2 + 2)
Y (s) =1
s2 + 2− 1
s2(s2 + 2)
es decir
Tomando la transformada de Laplace inversa a ambos lados se obtiene:
L−1X(s) = L−1
−2s2 + 1
− 1
s2(s2 + 2)
L−1Y (s) = L−1
1
s2 + 2− 1
s2(s2 + 2)
Es decir
x(t) = − 2√2
sin(√2 t)− 1
2t+
1
2√2
sin(√2 t)
y(t) =1√2
sin(√2 t)− 1
2t+
1
2√2
sin(√2 t)
Luego,

140 CAPITULO 3. ECUACIONES DIFERENCIALES
x(t) = − 3
2√2
sin(√2 t)− 1
2t
y(t) =3
2√2
sin(√2 t)− 1
2t. o,
x(t) = −3√2
4sin(√2 t)− 1
2t
y(t) =3√2
4sin(√2 t)− 1
2t.
Ejercicios 3.89. Use la transformada de Laplace para encontrar la solucion
de cada uno de los siguientes sistemas de ecuaciones diferenciales
1)dx
dt= x+ y, x(0) = 1; y(0) = −1
dy
dt= 2x
2)dx
dt− 1 = x+ 2y, x(0) = 0; y(0) = 0
dy
dt= −x+ y
3)dx
dy+dy
dx= x− y, x(0) = 1; y(0) = −2
dx
dy− 2
dy
dx= 2x+ y
4)d2x
dt2+d2y
dt2= t2, x(0) = 8; y(0) = 0
d2x
dt2− d2y
dt2= 4t, x′(0) = 0; y′(0) = 0
5)d2x
dt2+ 3
dy
dt+ 3y = 0, x(0) = 0; x′(0) = 2
d2x
dt2− 2y = t, y(0) = 0;
6)dx
dt− dy
dt= −x− y, x(0) = 0; y(0) = 1

3.13. SOLUCION EN SERIE DE POTENCIAS 141
dx
dt+dy
dt= −2y,
3.13. Solucion en serie de potencias
Es conocido el teorema de TAYLOR que afirma que si f es una funcion
que tiene derivada continua de todo orden en un intervalo alrededor de x0
de la forma (x0 − r, x0 + r) y supuesto que existe una constante positi-
va M (que depende de x0 ) de tal forma que |fn(x)| ≤ M para todo
x ∈ (x0 − r, x0 + r) para todo n ≥ N , entonces
f(x) =∞∑
k=0
f (k)(x0) (x− x0)k
k!, para todo x ∈ (x0 − r, x0 + r)
dicha serie se llama la serie de TAYLOR de la funcion f alrededor del
punto x0. Ası por ejemplo la serie de TAYLOR de ex alrededor de
x0 = 0 es
ex = 1 + x+x2
2!+x3
3!+ · · ·+ xn
n!+ · · · =
∞∑
k=0
xk
k!
La serie para sinx es
sinx = x− x3
3!+x5
5!− x7
7!+ · · ·+ (−1)n x2n−1
(2n− 1)!+ · · ·
Es decir
sinx =∞∑
k=0
(−1)kx2k−1
(2k − 1)!
Estas series que en general se llaman series de potencias permiten obten-
er soluciones de algunas ecuaciones diferenciales lineales que usando otro
metodo serıa imposible de calcular.
Ejemplo 3.90. Encontrar una serie de potencias y =∞∑
n=0an x
n, que sea
solucion de la ecuacion diferencial y′′ + xy′ + y = 0

142 CAPITULO 3. ECUACIONES DIFERENCIALES
Solucion. Supongamos que y =∞∑
n=0an x
n, es solucion. Entonces,
y′ =∞∑
n=0
an nxn−1, es decir, y′ =
∞∑
n=1
nan xn−1 luego,
y′′ =∞∑
n=1
n (n− 1) an xn−2, por tanto, y′′ =
∞∑
n=2
n (n− 1) an xn−2
como
y =∞∑
n=0
an xn, es solucion de y′′ + xy′ + y = 0 se tiene
∞∑
n=2
n (n− 1) an xn−2 + x
∞∑
n=1
nan xn−1 +
∞∑
n=0
an xn = 0, por tanto
∞∑
n=2
n (n− 1) an xn−2 +
∞∑
n=1
nan xn +
∞∑
n=0
an xn = 0,
Si en la primera suma hacemos k = n− 2 se obtiene
∞∑
k=0
(k + 2) (k + 1) ak+2 xk +
∞∑
n=1
nan xn +
∞∑
n=0
an xn = 0
Escribiendo explıcitamente el primer termino de la primera suma y el pri-
mero de la tercera suma se obtiene
2a2 +∞∑
k=1
(k + 2) (k + 1) ak+2 xk +
∞∑
n=1
nan xn + a0 +
∞∑
n=1
an xn = 0
o lo que es lo mismo
2a2 +∞∑
n=1
(n+ 2) (n+ 1) an+2 xn +
∞∑
n=1
nan xn + a0 +
∞∑
n=1
an xn = 0
Es decir,
2a2 + a0 +
∞∑
n=1
[(n+ 2) (n+ 1) an+2 + nan + an] xn = 0

3.13. SOLUCION EN SERIE DE POTENCIAS 143
que podemos escribir
2a2 + a0 +
∞∑
n=1
[(n+ 2) (n+ 1) an+2 + (n+ 1) an] xn = 0
lo que significa
2a2 + a0 = 0 y (n+ 2) (n+ 1) an+2 + (n+ 1) an = 0
por tanto 2a2 = −a0 y a2 =−a02
. Tambien
(n+ 2) an+2 + an = 0, entonces an+2 =−ann+ 2
a4 = −a24
= −−a0/24
=a08. Se puede deducir que
a2n = (−1)n a02,4,6. · · · .(2n)
por otro lado
a3 =−a13
, a5 =−a35
= −−a1/35
=a13,5
, a7 = −a57
= −−a1/157
a7 = −a1
3,5,7, · · · a2n−1 = (−1)n a1
1,3,5,7. · · · .(2n− 1), n ≥ 1
luego
y =∞∑
n=0
an xn = a0 +
∞∑
n=1
an xn
es decir
y = a0 +∞∑
n=1
(−1)na0 x2n2,4,6. · · · .(2n) +
∞∑
n=1
(−1)na1 x2n−1
1,3,5,7. · · · .(2n− 1)
que podemos escribir
y = a0
[
1 +
∞∑
n=1
(−1)n x2n2,4,6. · · · .(2n)
]
+ a1
∞∑
n=1
(−1)n x2n−1
1,3,5,7. · · · .(2n− 1)
donde a0 y a1 son numeros reales arbitrarios.

144 CAPITULO 3. ECUACIONES DIFERENCIALES
Ejemplo 3.91. Encontrar la serie de potencias y =∞∑
n=0an x
n que sea
solucion de la ecuacion diferencial y′′ = xy′
Solucion. Podemos escribir la ecuacion diferencial dada ası, y′′ − xy′ = 0.
Ahora, si y =∞∑
n=0an x
n es solucion entonces
y′ =∞∑
n=0
an nxn−1 =
∞∑
n=1
nan xn−1 ahora,
y′′ =∞∑
n=1
n (n− 1) an xn−2 =
∞∑
n=2
n (n− 1) an xn−2 luego
∞∑
n=2
n (n− 1) an xn−2 − x
∞∑
n=1
nan xn−1 = 0. es decir
∞∑
n=2
n (n− 1) an xn−2 −
∞∑
n=1
nan xn = 0.
Luego si en la primera suma se hace n− 2 = k se obtiene,
∞∑
k=0
ak+2 (k + 2) (k + 1) xk −∞∑
n=1
an nxn = 0.
Separando el primer sumando de la primera suma, se obtiene
2a2+∞∑
k=1
(k + 2) (k + 1) ak+2 xk −
∞∑
n=1
an nxn = 0.
Se puede escribir,
2a2+∞∑
n=1
(n+ 2) (n+ 1) an+2 xn −
∞∑
n=1
an nxn = 0.
2a2+∞∑
n=1
[
(n+ 2) (n+ 1) an+2 − an n]
xn = 0.
es decir
a2 = 0 y (n+ 2) (n+ 1) an+2 − nan = 0.

3.13. SOLUCION EN SERIE DE POTENCIAS 145
Por lo tanto
(n+ 2) (n+ 1) an+2 = nan despejando, an+2 =n an
(n+ 1) (n+ 2)
de aquı a2n = 0, n ≥ 0 y
a3 =1
2,3a1, a5 =
3
4,5a3 =
3
2,3,4,5a1, a7 =
5
6,7a5 =
5
6,7.
3
2,3,4,5a1
=3,5
2,3,4,5,6,7a1, · · · , a2n+1 =
1,3,5,7. · · · .(2n− 1)
1,2,3,4. · · · .(2n+ 1)a1, n ≥ 1
a2n+1 =1,3,5,7. · · · .(2n− 1)
1,2,3,4. · · · .(2n+ 1)a1
es decir que la solucion es
y = a1
∞∑
n=1
1,3,5,7. · · · .(2n− 1)
1,2,3,4. · · · .(2n+ 1)x2n+1
donde a1 es cualquier numero real. Luego
y = a1
∞∑
n=1
1,3,5,7. · · · .(2n− 1)
(2n+ 1)!x2n+1
Ejemplo 3.92. Encontrar la serie de potencias y =∞∑
n=0an x
n que sea
solucion de la ecuacion diferencial (1− x)y′ − y = 0
Si y =∞∑
n=0an x
n es solucion entonces, y′ =∞∑
n=1an nx
n−1 luego,
(1− x)∞∑
n=1
an nxn−1 −
∞∑
n=0
an xn = 0, es decir
∞∑
n=1
an nxn−1 −
∞∑
n=1
an nxn −
∞∑
n=0
an xn = 0.
Si hacemos, k = n− 1 en la primera suma se obtiene,
∞∑
k=0
ak+1 (k + 1)xk −∞∑
n=1
an nxn −
∞∑
n=0
an xn = 0, es decir

146 CAPITULO 3. ECUACIONES DIFERENCIALES
a1 +∞∑
k=1
ak+1 (k + 1)xk −∞∑
n=1
an nxn − a0 −
∞∑
n=1
an xn = 0, luego
a1 − a0 +∞∑
n=1
an+1 (n+ 1)xn −∞∑
n=1
an nxn −
∞∑
n=1
an xn = 0, por tanto
a1 − a0 +∞∑
n=1
[(n+ 1)an+1 − nan − an
]xn = 0, esto es
a1 − a0 = 0 y (n+ 1)an+1 − (n+ 1)an = 0.
de aquı se tiene que,
a1 = a0 an+1 = an a2 = a1 a3 = a2
Es decir, an+1 = an, para toda n.
Luego la solucion de la ecuacion dada es y =∞∑
n=0a0 x
n = a0∞∑
n=0xn
Ejercicios 3.93. Encuentre una solucion en serie de potencias
y =∞∑
n=0an x
n para cada una de las siguientes ecuaciones diferenciales
1) y′ = αx 2) y′′ + 4y = 0
3) y′′ + 3xy′ + 3y = 0 4) (1 + x2)y′′ + 10xy′ + 20y = 0
5) y′′ − y′ = 0 6) y′′ + x2y = 0
7) (1 + x)y′ − 2y = 0
Apendice A
Sucesiones y series
A.1. Sucesiones
Una sucesion numerica (an) es un conjunto de numeros reales dispuestos
en un orden, ası:
a0, a1, a2, . . . , an, . . .
Ejemplo A.1.
1) 1,1
2,1
3,1
4,1
5, . . . ,
1
n, . . .
2) 1, 2, 4, 6, 8, . . . , 2n, . . .
3) 1, −1
2,1
4, −1
8,
1
16, . . . , (−1)n 1
2n, . . .
4) 0,1
2,2
3,3
4,4
5, . . . ,
n
n + 1, . . .
El elemento an en cada caso de llama termino general de la sucesion, ası,
an =1
n, an = 2n an =
(−1)n2n
, an =n
n+ 1,
son los terminos generales de las sucesiones 1), 2), 3), y 4) respecti-
vamente.
147

148 APENDICE A. SUCESIONES Y SERIES
Si en una sucesion el termino general esn
2n, entonces los primeros 6
terminos de la sucesion son:
0,1
2,
1
2,
3
8,
1
4,
5
32.
Ahora, si el termino general an = (−1)n + 1 entonces los primeros 6
terminos de la sucesion son:
2, 0, 2, 0, 2, 0.
Ejercicios A.2. Para cada una de las sucesiones cuyos terminos generales
son los que se indican, calcular los primeros siete terminos.
1) an =3
n+ 12) an =
(−1)n+1
n+ 1
3) an =2n
n2 + 14) an =
(1
3
)n
5) an =(−1)n 3n+ 1
6) an =n+ 1
n+ 2
7) an = 2 + (−1)n 8) an =
(
1 +1
n
)n
Definicion A.3. Una sucesion (an) se dice que tiene un lımite L si la
distancia entre L y cada termino an es cada vez mas pequena a medida
que n crece. Este hecho se escribe, lımn→∞
an = L
Ejemplo A.4. Si an =n
n+ 1, entonces lım
n→∞n
n+ 1= 1
Si examinamos los terminos de la sucesion,
0,1
2,
2
3,
3
4,
4
5,
5
6,
6
7,
7
8,
8
9,
9
10, . . .
entonces, las distancias de cada termino al lımite 1, son
1,1
2,
1
3,
1
4,
1
5,
1
6,
1
7,
1
8,
1
9,
1
10, . . .

A.1. SUCESIONES 149
Como puede verse la distancia del numero 1 a cada termino de la sucesion
es cada vez mas pequena. Este hecho se puede formalizar de la siguiente
forma:
lımn→∞
an = L si y solo si dado un numero real positivo ε existe un numero
natural N de tal forma que si n ≥ N entonces |an − L| < ε.
Teoremas (sobre lımites)
I) lımn→∞
k
nα= 0 si α > 0 y k es cualquier constante.
Ejemplo A.5.
1) lımn→∞
3
n2= 0 2) lım
n→∞−5n3
= 0
3) lımn→∞
100
n3/2= 0 4) lım
n→∞100
n1/2= 0
II) lımn→∞
xn = 0 si |x| < 1.
Ejemplo A.6.
1) lımn→∞
(2
3
)n
= 0 2) lımn→∞
(2
e
)n
= 0
3) lımn→∞
(3,14
π
)n
= 0 4) lımn→∞
(9
10
)n
= 0
III) lımn→∞
n1/n = 1.
IV) lımn→∞
(
1 +a
n
)n= ea.
Ejemplo A.7.
1) lımn→∞
(
1 +2
n
)n
= e2 2) lımn→∞
(
1 +
√2
n
)n
= e√2
3) lımn→∞
(
1 +(−3)n
)n
= e−3 4) lımn→∞
(
1 +π
n
)n= eπ

150 APENDICE A. SUCESIONES Y SERIES
Teorema: Algebra de lımites
Si lımn→∞
an = A y lımn→∞
bn = B entonces:
I) lımn→∞
(an + bn) = A+B
II) lımn→∞
(k an) = k A, k es una constante.
III) lımn→∞
(an.bn) = A.B
Si ademas de las condiciones iniciales agregamos que bn 6= 0 y que
B 6= 0 se cumple
IV) lımn→∞
anbn
=A
B
Ejemplo A.8.
1. lımn→∞
(n
n+ 1+
n
4n+ 1
)
= lımn→∞
n
n+ 1+ lım
n→∞n
4n+ 1= 1 +
1
4=
5
4
2. lımn→∞
(3n
n+ 1
)
= lımn→∞
3
(n
n+ 1
)
= 3 lımn→∞
(n
n+ 1
)
= 3. 1 = 3
3. lımn→∞
(2n
n+ 1
)
.
(n+ 2
3n
)
= lımn→∞
2n
n+ 1. lımn→∞
n+ 2
3n= 2.
1
3=
2
3.
4. lımn→∞
n
3n+ 1n+ 2
n
=
lımn→∞
n
3n+ 1
lımn→∞
n+ 2
2n
=
1
31
2
=2
3.
A.2. Series
Si tenemos una sucesion (an) de numeros reales podemos, a partir de ella,
formar una nueva sucesion de la siguiente forma: con la sucesion original
a0, a1, a2, . . . , an, . . .
formamos la sucesion
s0 = a0, s1 = a0 + a1, s2 = a0 + a1 + a2, s3 = a0 + a1 + a2 + a3, . . .

A.2. SERIES 151
y en general
sn = a0 + a1 + a2 + a3 + . . . + an
La sucesion (sn) ası obtenida se llama serie infinita o simplemente serie y
se nombra tambien usando una de las siguientes notaciones
a1 + a2 + a3 + . . .
a1 + a2 + a3 + . . . + an + . . .∞∑
i=1
an
Por ejemplo, la serie∞∑
k=1
k
k + 1representa la sucesion (sn) cuyo termino
general es
sn =
n∑
k=1
k
k + 1=
1
2+
2
3+
3
4+ . . . +
n
n+ 1
Si existe un numero real s tal que lımn→∞
sn = S se dice que la serie∞∑
k=1
ak
es convergente, en caso contrario se dice que la serie es divergente.
Ejemplo A.9.
si sn =n∑
k=1
1
k(k + 1), entonces lım
n→∞sn = 1 en efecto,
sn =
n∑
k=1
1
k(k + 1)=
n∑
k=1
(1
k− 1
k + 1
)
=
(
1− 1
2
)
+
(1
2− 1
3
)
+ . . . +
(1
n− 1− 1
n
)
+
(1
n− 1
n+ 1
)
luego, sn = 1− 1
n+ 1entonces,
lımn→∞
sn = lımn→∞
(
1− 1
n+ 1
)
= 1− lımn→∞
1
n+ 1= 1
Podemos escribir∞∑
k=1
1
k(k + 1)= 1

152 APENDICE A. SUCESIONES Y SERIES
Ejemplo A.10.
si sn =n∑
k=0
1
2k= 1 +
1
2+
1
22+
1
23+ . . . +
1
2n−1+
1
2n
=2n + 2n−1 + 2n−2 + 2n−3 + . . . + 2 + 1
2n
=2n+1 − 1
2n
dividiendo cada termino por 2n+1 se obtiene
=
2n+1
2n+1− 1
2n+1
2n
2n+1
=1− 1
2n+1
1
2
, luego
lımn→∞
sn = lımn→∞
1− 1
2n+1
1
2
=1− 0
1/2
lımn→∞
sn =2, es decir
∞∑
n=0
1
2n=2
A.2.1. Propiedades de las series convergentes
1.∞∑
n=1
(an + bn) =∞∑
n=1
an +∞∑
n=1
bn, Propiedad aditiva
2.∞∑
n=1
k an = k∞∑
n=1
an, Propiedad homogenea
A.3. Series geometricas
Una serie geometrica (sn) es de la forma sn =n∑
k=0
xk donde el termino
general xn es la potencia n-esima de un numero real fijo x. Notese que

A.3. SERIES GEOMETRICAS 153
dentro de la definicion de serie geometrica se exige que el primer termino
sea x0.
A.3.1. Convergencia de una serie geometrica
Sea (sn) la serie geometrica sn =n∑
k=0
xk, esto es
sn = 1 + x+ x2 + x3 + . . . + xn−1 + xn (A.1)
Multiplicando esta ultima ecuacion por x, obviamente x 6= 0, se tiene
x sn = x+ x2 + x3 + . . . + xn−1 + xn + xn+1 (A.2)
Restando A.2 de A.1 se obtiene
sn − x sn =[1 + x+ x2 + x3 + . . . + xn−1 + xn]
−[x+ x2 + x3 + . . . + xn−1 + xn + xn+1] = 1− xn+1
Sacando factor comun, tenemos
(1− x) sn =1− xn+1
Despejando sn, se obtiene,
sn =1− xn+1
1− x=
1
1− x− xn+1
1− x, luego
lımn→∞
sn = lımn→∞
[1
1− x− xn+1
1− x
]
=1
1− x, si y solo si |x| < 1.
Es decir, la serie geometrican∑
k=0
xk, es convergente si |x| < 1, y es diver-
gente en caso contrario, es decir si |x| ≥ 1,
∞∑
k=0
xk =1
1− x, si y solo si |x| < 1 (A.3)
Ahora , si escribimos x2, en vez de x, en A.3 se obtiene
∞∑
k=0
x2k =1
1− x2, si |x| < 1 (A.4)

154 APENDICE A. SUCESIONES Y SERIES
Si multiplicamos a ambos lados de la igualdad por x en A.4 se obtiene
∞∑
k=0
x2k+1 =x
1− x2, si |x| < 1 (A.5)
Si en A.3 sustituimos x, por −x, se obtiene
∞∑
k=0
(−x)k =1
1 + x, si |x| < 1, es decir, (A.6)
∞∑
k=0
(−1)k(x)k =1
1 + x, si |x| < 1. (A.7)
Sustituyendo en esta ultima ecuacion A.7 x, por x2, se obtiene
∞∑
k=0
(−1)kx2k =1
1 + x2, si |x| < 1. (A.8)
Multiplicando en ambos lados de la igualdad A.8 por x, se obtiene
∞∑
k=0
(−1)kx2k+1 =x
1 + x2, si |x| < 1. (A.9)
Si reemplazamos x, por 3x, en A.8 se obtiene
∞∑
k=0
(−1)k (3x)2k =1
1 + (3x)2, es decir
∞∑
k=0
(−1)k 32k x2k =1
1 + 9x2, si |3x| < 1, luego
∞∑
k=0
(−1)k 32k x2k =1
1 + 9x2, si |x| < 1/3.. (A.10)
Todas las series anteriores se dedujeron de la serie geometrica
∞∑
k=0
xk =1
1− x, si |x| < 1,

A.3. SERIES GEOMETRICAS 155
tienen la forma∞∑
k=0
ak xk, y se llaman series de potencias. Los numeros
a0, a1, a2, . . . , an, se denominan coeficientes de la serie de potencias.
Otra forma de obtener mas series de potencias es derivando o integrando
termino a termino la ecuacion A.1. Por ejemplo, derivando obtenemos
1 + 2x+ 3x2 + 4x3 + . . . + nxn−1 + . . . =1
(1− x)2, si |x| < 1,
Integrando la misma serie A.1, se obtiene
x+x2
2+x3
3+ . . . +
xn
n+ . . . = − ln(1− x), si |x| < 1,
Integrando la ecuacion A.7, se obtiene
x− x2
2+x3
3− x4
4+ . . . + (−1)k x
k+1
k + 1+ . . . = ln(1 + x), si |x| < 1,
Integrando la ecuacion A.8, se obtiene
1− x2 + x4 − x6 + . . . + (−1)k x2k + . . . =1
1 + x2, si |x| < 1,
Integrando la serie anterior, tenemos
x− x3
3+x5
5− x7
7+ . . . + (−1)k x
2k+1
2k + 1+ . . . = arctanx, si |x| < 1,
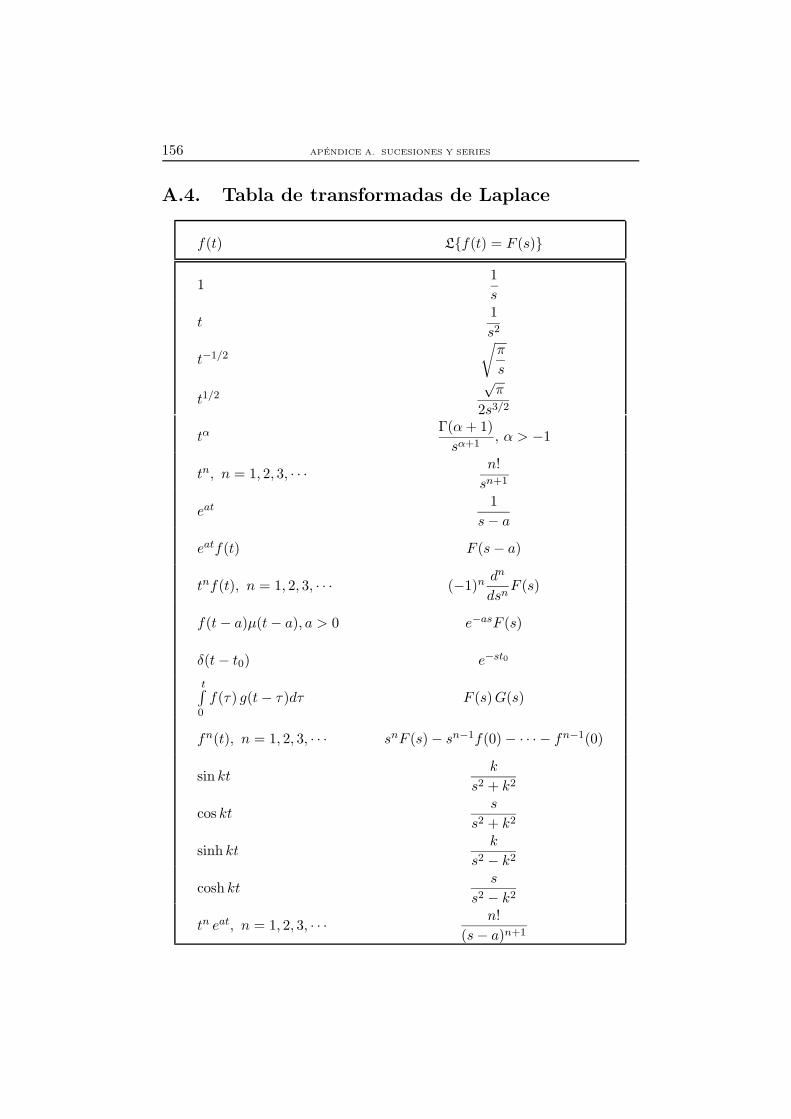
156 APENDICE A. SUCESIONES Y SERIES
A.4. Tabla de transformadas de Laplace
f(t) Lf(t) = F (s)
11
s
t1
s2
t−1/2
√π
s
t1/2√π
2s3/2
tαΓ(α+ 1)
sα+1, α > −1
tn, n = 1, 2, 3, · · · n!
sn+1
eat1
s− a
eatf(t) F (s− a)
tnf(t), n = 1, 2, 3, · · · (−1)n dn
dsnF (s)
f(t− a)µ(t− a), a > 0 e−asF (s)
δ(t− t0) e−st0
t∫
0
f(τ) g(t− τ)dτ F (s)G(s)
fn(t), n = 1, 2, 3, · · · snF (s)− sn−1f(0)− · · · − fn−1(0)
sin ktk
s2 + k2
cos kts
s2 + k2
sinh ktk
s2 − k2
cosh kts
s2 − k2
tn eat, n = 1, 2, 3, · · · n!
(s− a)n+1

A.5. IDENTIDADES TRIGONOMETRICAS 157
A.5. Identidades trigonometricas
1. sin2A+ cos2A = 1
2. 1 + tan2A = sec2A
3. 1 + cot2A = csc2A
4. sin(A+B) = sinA cosB + sinB cosA
5. cos(A+B) = cosA cosB − sinA sinB
6. sin(A−B) = sinA cosB − sinB cosA
7. cos(A−B) = cosA cosB + sinA sinB
8. sin 2A = 2 sinA cosA
9. cos 2A = cos2A− sin2A = 1− 2 sin2A = 2 cos2A− 1
10. sin2A =1− cos 2A
2
11. cos2A =1 + cos 2A
2
12. tan(A+B) =tanA+ tanB
1− tanA tanB
13. tan(A−B) =tanA− tanB
1 + tanA tanB
14. tan(2A) =2 tanA
1− tan2A
15. 2 sinA cosB = sin(A+B) + sin(A−B)
16. 2 cosA sinB = sin(A+B)− sin(A−B)
17. 2 cosA cosB = cos(A+B) + cos(A−B)
18. 2 sinA sinB = cos(A−B)− cos(A+B)
19. sin(−A) = − sinA
20. cos(−A) = cosA
21. tan(−A) = − tan(A)

158 APENDICE A. SUCESIONES Y SERIES

Respuesta a ejercicios
Ejercicios 2.6, pagina 20
1. F (s) =s
s2 + k23. F (s) =
1
s− a5. F (s) =
6
s4
Ejercicios 2.7, pagina 20
1. F (s) =2
s(s2 + 4)3. F (s) =
2(s2 − 5)
(s2 + 25)(s2 + 1)
7. F (s) =−2(4s3 − 6s2 + 6s− 3)
s4
Ejercicios 2.12, pagina 23
1. F (s) =e5
s− 13. F (s) =
2
(s− 3)35. F (s) =
2s(s2 − 27)
(s2 + 9)3
Segunda parte
1. F (s) =4− 10s
s23. F (s) =
2(3 + 6s+ 6s2 + 4s3)
s4
5. F (s) =6(s3 + 2s2 + 18)
s3(s2 + 9)
Tercera parte
1. f(t) = t3 3. f(t) = 3 + 2t− t5
24
5. f(t) = 4 cos 3t 7. f(t) = 3 cos 4t+ 0,5 sin 4t
9. f(t) =et(3e−4t + 1)
4
159

160 APENDICE A. SUCESIONES Y SERIES
Ejercicios 2.22, pagina 28
1. f(t) = 0,5 (1− cos 2t+ sin 2t)
3. f(t) = 3 e−3t cos 4t− 7/4 e−3t sin 4t
5. f(t) = et cos 2t− 1,5 et sin 2t
Segunda parte
1. f(t) = −2 + 5µ(t− 3) 3. f(t) = t3 µ(t− 1)
Ejercicios 2.26, pagina 29
1. F (s) =2s(s2 − 27)
(s2 + 9)33. F (s) =
(s+ 1)e−s
s2
Ejercicios 2.33, pagina 33
1. y(t) =1
2e−t + 6 e−2t − 9
2e−3t 3. y(t) =
3
5e−2t +
2
5cos t+
1
5sin t
Ejercicios 2.41, pagina 45
1. y(t) = sin t µ(t− 2π) + sin t
3. y(t) =1
2t+
1
4− 1
4e−2t +
1
2µ(t− 2)− 1
2e−2(t−2) µ(t− 2)
5. y(t) = (t− 1)e−(t−1) µ(t− 1) + te−t
9. f(t) = (4t2 − 7t+ 4)e−t
Ejercicios 3.11, pagina 59
1. y =x4
4+ x+
11
43. y =
(2x+ 1)5
10+
59
105. y = x+ 1− ln |x+ 1|+ ln 2
Ejercicios 3.15, pagina 62
1. 5y4 = 4x5 + C 3. − tan−1 y = sin−1 x+ C
5.1
y= ln |x+ 1|+ C 7. y = Cex(x− 1)
9. y3 = −3
x+ 3 ln |x|+ C
11.y3
3− y2
2+ y − ln |y + 1| = − 1
2x2+ C

A.5. IDENTIDADES TRIGONOMETRICAS 161
13. y + 2 ln |y − 1| = x+ 5 ln |x− 3|+ C
15. ey−1 = − ln |1 + cosx|+ e−1 − ln 2
Ejercicios 3.66, pagina 103
1. y(x) = c1 e0,83x + c2 e
−0,83x + c3 cos(1,2x) + c4 sin(1,2x)
2. y(x) = c1 ex + c2 e
−x + c3 e3x + c4 e
−2x
3. y(x) = c1 + c2 x+ c3 e−2,11x + c4 e
2,36x
4. y(x) = c1 + c2 x+ c3 e−0,5x cos(0,86x) + c4 e
−0,5x sin(0,86x)
5. y(x) = c1 e3x + c2 e
−3x + c3 cos(√2x) + c4 sin(
√2x)
6. y(x) = c1 + c2 x+ c3 x2 + c4 e
x cos(4x) + c5 ex sin(4x)
10. y(x) = c1 + c2 x+ c3 e−1/2x + c4 e
2x cos(2x) + c5 e2x sin(2x)
Ejercicios 3.69, pagina 110
1. yg(x) = c1 + c2 x+ c3 e3x − x4
36− x3
27− x2
27
2. yg(x) = c1 ex + c2 e
0,58 x + c3 e3,41 x − 4− 0,26 cosx+ 0,19 sinx
3. yg(x) = c1 ex + c2 cosx+ c3 sinx−
1
2x ex +
1
4x2ex +
1
4e−x − 7
4. yg(x) = c1 ex + c2 x ex + c3 x
2 ex +1
6x3 ex + x− 13
5. yg(x) = c1 + c2 x+ c3 e2x + c4 e
−2x − 5
48x4 − 5
16x2 − 1
16x e2x
Ejercicios 3.78, pagina 124
1. Ip(t) =150
13cos t+
100
13sin t
2. Q(t) = e−10 t (c1 cos 10t+ c2 sin 10t) +3
2
Ejercicios 3.85, pagina 134
1. yH(x) = c1 x2,79 + c2 x
−1,79
2. yH(x) = c1 x−1 + c2 x
−1 lnx
3. yH(x) = c1 x−1 + c2 x
−2
4. yH(x) = e−2/3[
c1 cos(2√2 lnx
3
)
+ c2 sin(2√2 lnx
3
)]

162 APENDICE A. SUCESIONES Y SERIES
5. yH(x) = e1/4[
c1 cos(√7 lnx
4
)
+ c2 sin(√7 lnx
4
)]
Ejercicios 3.87, pagina 136
1. yp(x) =lnx
3+
5
183. yp(x) = −x2(1 + lnx)
4. yp(x) = −0,192 x4 5. yp(x) =2 x6
3
6. yp(x) = −x−4 7. yp(x) =x
6[ lnx− 5
6]
Bibliografıa
[1] Apostol, Tom M. Calculus volumen I. Reverte, 2001.
[2] Zill, Dennis G. Ecuaciones Diferenciales con Aplicaciones de Modelado,
sexta edicion, Thomson Editores. Mexico, 1995.
[3] Purcell, Edwin J. y otros. Calculo, octava edicion. Pearson Educacion.
Mexico, 2001.
[4] Braun, Martin . Ecuaciones Diferenciales y sus Aplicaciones. Grupo Edi-
torial Iberoamerica, 1990.
[5] Ayres, Frank. Ecuaciones Diferenciales. Mcgraw-Hill, 1985.
[6] Soliman, Samir y Srinath, Mandyam. Senales y Sistemas Continuos y
discretos, segunda edicion. Prentice Hall. Madrid, 1999.
[7] Zill, Dennis G. Ecuaciones Diferenciales con Aplicaciones. Grupo Edi-
torial Iberoamerica. Mexico, 1997.
[8] Nagle, R. Kent y otros Ecuaciones Diferenciales. Addison Wesley. Me-
xico, 2001.
[9] Rairan Danilo Analisis de Sistemas Dinamicos y Control PID. Fondo de
Publicaciones Universidad Distrital. Bogota, 2006.
163
Indice alfabetico
coeficientes
indeterminados, 89
convolucion, 33
convolucion
de 1 y f(t), 41
criterio de comparacion
directo, 10
por paso al lımite, 10
criterios de convergencia, 10
diferencial total, 66
ecuacion autonoma, 56
ecuacion auxiliar, 86
ecuacion diferencial
lineal, 72
ecuaciones
diferenciales exactas, 66
ecuaciones diferenciales, 31, 51
de Bernoulli, 74
de orden superior, 101
de variables separables, 61
homogeneas, 63
lineales
de segundo orden, 86
no homogeneas, 89
no-homogeneas
de orden superior, 103
ordinarias, 51
sistemas de, 136
funcion
continua, 17
de orden exponencial, 17
de transferencia, 113
delta de Dirac, 41
discontinua, 17
escalon unitario µ(t) , 25
gama, 12
periodica, 47
funcion continua
parte por parte, 47
funcion impulso, 43
funciones
causales, 33
continuas, 8
integral
convergente, 2
definida, 2
divergente, 2
integrales
impropias, 1, 7, 14
integrales definidas, 1
lımites
de integracion, 3
164
INDICE ALFABETICO 165
ley de Kirchhoff, 110
movimiento
armonico simple, 116
crıticamente amortiguado, 120
libre armonico, 118
libre no amortiguado, 114
oscilatorio, 120
subamortiguado, 120
pares transformados, 17
periodo fundamental, 47
polinomio, 5
puntos atractores, 58
puntos de equilibrio, 56
puntos estacionarios, 56
puntos repulsores, 58
retrato de fase, 57
serie
convergente, 151
de potencias, 141
de Taylor, 141
divergente, 151
serie infinita, 151
series, 150
convergentes, 152
de potencias, 155
geometrica, 152, 153
solucion de equilibrio, 56
sucesion
lımite de una, 148
sucesiones, 147
termino general, 147
sucesiones y series, 147
teorema
de Taylor, 141
de traslaciones, 24
transformada, 15
transformada de Laplace, 15
de µ(t− a), 26
de la convolucion, 39
de la funcion delta, 43
de una derivada, 30
de una funcion periodica, 47
derivada de una, 29
propiedades de la, 20
transformada inversa
de Laplace, 21
traslaciones, 24
variacion
de parametros, 97, 99