int matlab y simulink
TRANSCRIPT
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 1/22
Dinámica de Sistemas y Control - 2007
Autor: Ing. Gabriel Lorenzo
Introducción a MATLAB
MATLAB es el nombre abreviado de “MATrix LABoratory”. MATLAB es un programapara realizar cálculos numéricos con vectores y matrices, pudiéndose también trabajar con
números escalares (tanto reales como complejos), con cadenas de caracteres y con otras
estructuras de información. Además, MATLAB cuenta con un lenguaje de programación
propio.
Desde el punto de vista de control, MATLAB se puede considerar un entorno matemático
de simulación que puede utilizarse para codificar modelos y analizar los sistemas
modelados. Permite el estudio de sistemas continuos, discretos, lineales y no lineales en el
dominio temporal y de la frecuencia.
Otra característica de MATLAB es que cuenta con numerosos paquetes adicionales
llamados “toolboxes”. En el caso que nos ocupa se utilizará el Control System Toolbox, pero es importante tener en cuenta que existen diversos toolboxes; cada uno de ellos
destinado a una aplicación específica (control, estadística, procesamiento de señales,
manejo de lenguaje simbólico, etc.).
La presente introducción se plantea como una guía práctica a fin de permitir la
familiarización con los comandos de MATLAB que serán frecuentemente utilizados a lo
largo esta materia.
El entorno de operación de MATLAB
Existen numerosas referencias bibliográficas (además del tutorial del programa) en donde
se explica en detalle el entorno operativo de MATLAB (algunas de ellas figuran en el
listado de referencias de este apunte). El objetivo de esta sección es presentar cada uno de
los componentes del entorno MATLAB y proporcionar una breve descripción de los
mismos:
Command Window: es la ventana principal del programa en donde se ejecutan los
comandos e instrucciones lógicas.
Workspace: Es el espacio de trabajo en donde se almacenan todas las variables definidas através del “Command Window”. Éste puede ser guardado en un archivo binario (*.mat) ycargado nuevamente, en otra ejecución del programa.
Command History: Almacena el listado de comandos ejecutados desde el “CommandWindow” de MATLAB. El historial se guarda automáticamente, quedando registradas cadauna de las sesiones con fecha y hora. Una opción interesante, es seleccionar los comandos
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 2/22
relevantes del “Command History” y generar con ellos un archivo *.m (secuencias decomandos, también denominadas scripts).
Current Directory: especifica el directorio de trabajo de MATLAB
Listado de comandos útiles
Todos los comandos que figuran a continuación se ejecutan desde el “Command Window”de MATLAB:
help: proporciona ayuda sobre un determinado ítem (toolbox, comando, etc.).
Ejemplo:
>> help symbolic %proporciona información sobre el Symbolic
toolbox de MATLAB.
>> help plot %proporciona información sobre el comando PLOT
clc: borra la pantalla del “Command Window”
clear: limpia las variables del “Workspace”. También se pueden borrar individualmenteescribiendo:
>> clear nombre_de_la_variable
whos: proporciona un listado de las variables definidas en el “Workspace”. Podemospreguntar también por variables individuales:
>> whos nombre_de_la_variable
open: permite abrir los archivos que se encuentran en el “Current Directory” de MATLABespecificado, por ejemplo:
>> open nombre_del_archivo.m
Manejo de vectores
Vector fila:
>> A=[2,4,5]
ó
>> A=[2 4 5]
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 3/22
Nota: se puede ocultar el resultado de la operación agregando un punto y coma (;) al final
de la sentencia
Nota: los elementos del vector pueden separarse mediante una coma, o bien mediante un
espacio.
Vector columna:
>> B=[2;4;5]
o bien,
>> B=A'
Nota: El símbolo ('), transpone el vector A para generar el vector columna B. Este comando
también puede ser utilizado para generar la transpuesta de una matriz dada.
Vectores con espaciamiento uniforme:
>> A=[1:10] %los valores aumentan sucesivamente una unidad
>> A=[1:2:10] %los valores aumentan sucesivamente en dos unidades)
>> A=[0.1:0.1:1] %los valores se incrementan en 0,1
>> A=logspace(1,2,10) %genera 10 puntos entre las décadas 10^1 y
10^2, uniformemente espaciados en forma logarítmica: [10 10^1.1
10^1.2 10^1.3 10^1.4 10^1.5 10^1.6 10^1.7 10^1.8 10^1.9 10^2]
Vectores de unos y ceros:
>> A=zeros(1,10) %genera un vector fila con ceros
>> B=ones(1,10) %genera un vector fila con unos
Nota: zeros(m,n) genera una matriz de orden m×n con todos sus elementos iguales a cero,
lo mismo se aplica a la sentencia: ones (m,n)

5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 4/22
Manejo de matrices
Matriz estándar
>> A=[1,2,3;4,5,6]
Matrices especiales
Sintaxis Tipo de matriz
>> A=diag(v) matriz diagonal con el vector v como diagonal
>> A=ones(n) matriz de n × n con todos los valores iguales a uno
>> A=eye(n) matriz identidad de n × n
>> A=rand(n) matriz de n × n con elementos de valor aleatorio entre 0 y 1
(distribución uniforme)
>> A=randn(n) matriz de n × n cuyos elementos siguen una distribución
normal (media 0 y varianza 1)
Operaciones con matrices
Sintaxis Operación
>> C=A*B matriz resultante del producto AB (si dicha operación es posible)
>> C=A.*B producto elemento por elemento (si size(A) = size(B), es
decir, si tienen el mismo tamaño)
>> inv(A) A^-1, si A es cuadrada e invertible
>> pinv(A) pseudoinversa de A.
>> C=A\B inv(A) * B, si existe inv(A): la barra inversa es la división
por la izquierda
>> x= A\b solución de: Ax = b si existe inv(A).
¡Véase help slash cuando A sea una matriz rectangular!
>> det(A) determinante (si A es una matriz cuadrada)
>> rank(A) rango (número de pivotes = dimensión del espacio de filas y del
espacio de columnas)
>> size(A) es el par de números [m n]
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 5/22
>> E=eig(X) E es un vector que contiene los autovalores de la matriz
cuadrada X ¡Ver help eig!
Creación de gráficos bidimensionales
Existen diversos comandos para realizar gráficos bidimensionales en MATLAB (plot,
stem, bar, stair).
En particular nos interesa el comando PLOT ya que nos va a permitir graficar las
respuestas y excitaciones de sistemas continuos.
Dado que MATLAB no es un lenguaje simbólico, las variables independientes y
dependientes a graficar deben ser definidas como vectores.
El comando PLOT presenta numerosas opciones para la presentación y edición de los
gráficos (tipo de línea, color, título de ejes, título de gráfico, etc.). A continuación se darán
algunos ejemplos prácticos de utilización de este comando. Se sugiere ampliar el contenido
de este apunte con la información proporcionada por la ayuda del programa.
>> x=[0:0.01:4*pi] %se define el vector x(var. independiente)
>> plot (x,sin(x)) %gráfico de la función sen (x)
Otra opción hubiese sido:
>> x=[0:0.01:4*pi] %se define el vector x
>> y= sin(x) %se define el vector y (variable dependiente)
>> plot (x,y)
Podemos hacer una nueva gráfica:
>> z=[0:0.1:5]
>> plot(z,exp(-z))
Como vemos, el gráfico en la ventana abierta se actualiza…si queremos conservar elgráfico original y abrir una nueva ventana usamos el comando FIGURE:
>> figure
>> plot (x,cos(x)) %gráfico de la función sen (x), recordar la
variable x ya había sido definida en el Workspace del programa.

5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 6/22
La presentación de los gráficos puede ser mejorada de dos maneras:
1- Mediante las opciones de los menús “Edit” e “Insert”, situados en la barra deherramientas de la ventana del gráfico.
2- Introduciendo los comandos de edición, títulos de ejes, título de gráficos, etc.
mediante el Workspace desde el programa.
>> figure
>> plot(z,exp(-z),'ro:')
>> xlabel ('x')
>> ylabel ('exp (-x)')
>> title ('Función exponencial')
En este caso graficamos la función exponencial en color rojo (r), con línea punteada (:) ycon un circulo (o) en cada uno de los puntos de la gráfica (ver el help del comando plot
para otras opciones de formato para graficar las curvas).
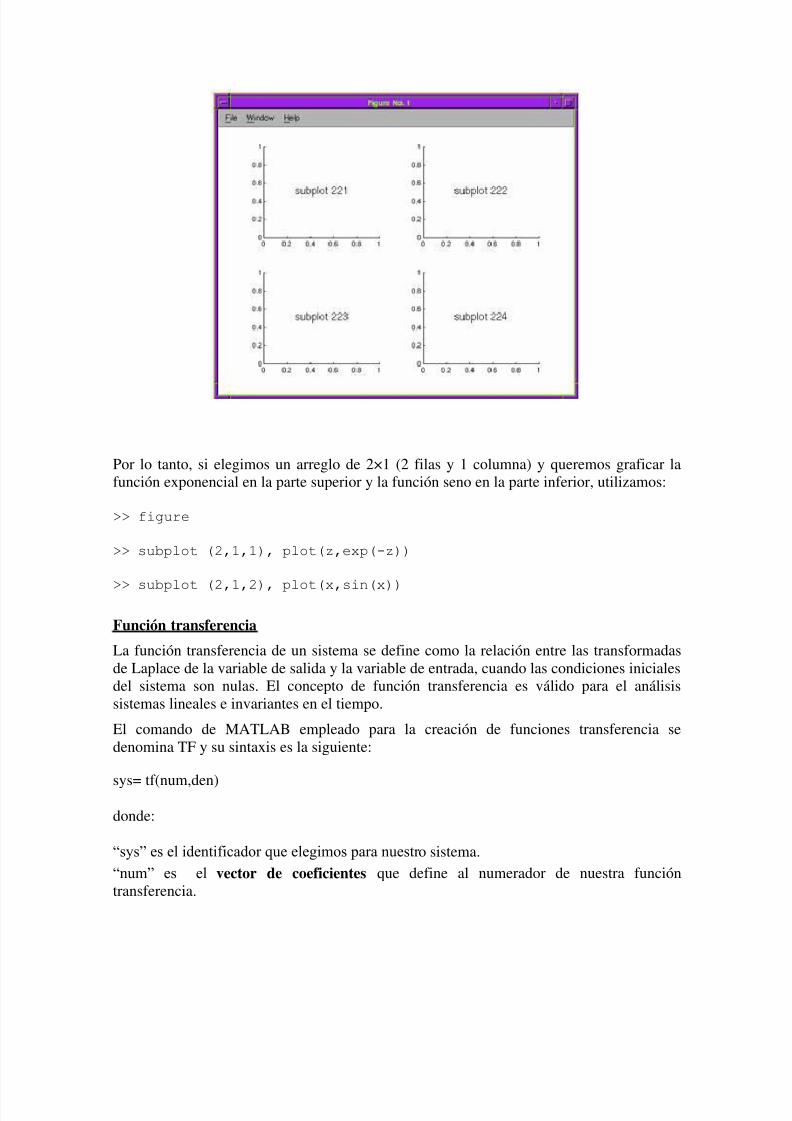
Para realizar gráficos múltiples es una única ventana se utiliza el comando SUBPLOT. La
sintaxis del comando es la siguiente:
>> subplot (m,n,p), plot (x,y)
m×n es el orden del arreglo que se va a utilizar para posicionar los gráficos y p denota la
posición del gráfico (el orden es contando fila por fila). La figura muestra un ejemplo para
un arreglo de m×n=2×2:
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 7/22
Por lo tanto, si elegimos un arreglo de 2×1 (2 filas y 1 columna) y queremos graficar la
función exponencial en la parte superior y la función seno en la parte inferior, utilizamos:
>> figure
>> subplot (2,1,1), plot(z,exp(-z))
>> subplot (2,1,2), plot(x,sin(x))
Función transferencia
La función transferencia de un sistema se define como la relación entre las transformadas
de Laplace de la variable de salida y la variable de entrada, cuando las condiciones iniciales
del sistema son nulas. El concepto de función transferencia es válido para el análisis
sistemas lineales e invariantes en el tiempo.
El comando de MATLAB empleado para la creación de funciones transferencia se
denomina TF y su sintaxis es la siguiente:
sys= tf(num,den)
donde:
“sys” es el identificador que elegimos para nuestr o sistema.
“num” es el vector de coeficientes que define al numerador de nuestra función
transferencia.
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 8/22
“den” es el vector de coeficientes que define al denominador de nuestra función
transferencia.
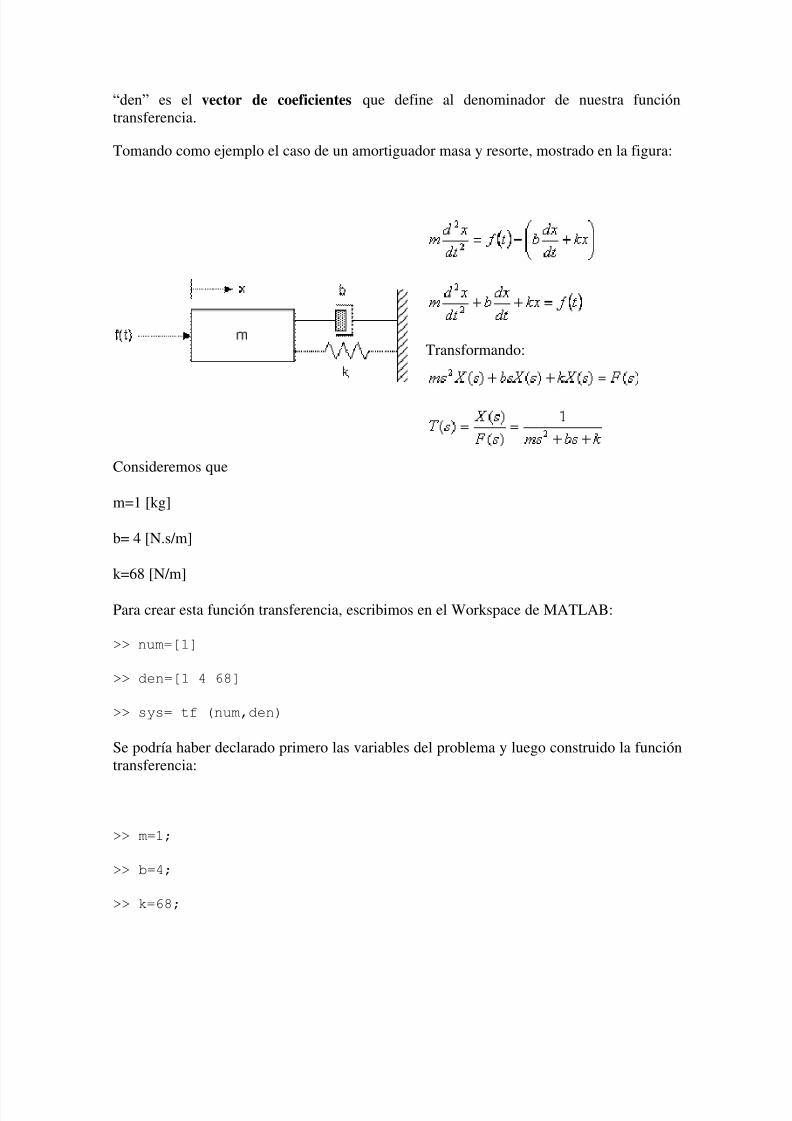
Tomando como ejemplo el caso de un amortiguador masa y resorte, mostrado en la figura:
Transformando:
Consideremos que
m=1 [kg]
b= 4 [N.s/m]
k=68 [N/m]
Para crear esta función transferencia, escribimos en el Workspace de MATLAB:
>> num=[1]
>> den=[1 4 68]
>> sys= tf (num,den)
Se podría haber declarado primero las variables del problema y luego construido la función
transferencia:
>> m=1;
>> b=4;
>> k=68;
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 9/22
>> num=[1]
>> den= [m b k]
>> sys= tf(num,den)
Respuesta del sistema a excitaciones predefinidas
Respuesta al impulso
La excitación impulsiva nos permite conocer la respuesta natural del sistema, tal como
vemos a continuación:
Luego,
El conocimiento de la respuesta natural del sistema, brinda una posibilidad para inferir la
localización de los polos (raíces del denominador) en el plano complejo.
El comando para obtener la respuesta impulsiva de un sistema se denomina IMPULSE y
su sintaxis es:
impulse (sys)
Si queremos examinar los polos de una función transferencia, una forma de calcularlos es
mediante el comando ROOTS. Este comando proporciona las raíces de un polinomio
definido a través de su vector de coeficientes (tal como lo hemos trabajado hasta el
momento).
>> m=1;
>> b=4;
>> k=68;
>> num=[1]
>> den= [m b k]
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 10/22
>> sys= tf(num,den) % no es necesario repetir estos comandos si
la información correspondiente quedó cargada en el Workspace de
MATLAB.
>> roots (den)
>> impulse (sys)
Como vemos, el sistema tiene 2 polos complejos conjugados (-2+8i ; -2-8i) ubicados en el
semiplano derecho del plano complejo. En este caso la respuesta al impulso del sistema es
una señal sub-amortiguada.
Se pueden explorar variantes, fijando los valores de m, b y k a fin de obtener polos reales
en el semiplano izquierdo, polos imaginarios y polos reales en el semiplano derecho (en
este caso con abstracción del sistema físico que representa la función transferencia). El
procedimiento se puede agilizar con el uso de un archivo *.m, tal como veremos másadelante.
Respuesta al escalón unitario
La señal mayormente utilizada para la caracterización del sistema es el escalón unitario.
Esta excitación también introduce en el sistema una perturbación abrupta con la ventaja de
que, desde el punto de vista práctico, es más fácil de generar que la señal impulso.
Esto hace que las características de desempeño en el dominio del tiempo de un sistema de
control (de cualquier orden) sean especificadas, generalmente, en términos de su respuesta
transitoria a un escalón unitario.
El comando para obtener la respuesta impulsiva de un sistema se denomina STEP y su
sintaxis es:
step (sys)
Considerando el sistema masa-resorte-amortiguador, calculamos ahora su respuesta al
escalón:
>> m=1;
>> b=4;
>> k=68;
>> num=[1]
>> den= [m b k]
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 11/22
>> sys= tf(num,den) %no es necesario repetir estos comandos si la
información correspondiente quedó cargada en el Workspace de
MATLAB.
>> step (sys)
Respuesta del sistema a excitaciones definidas por el usuario
Para obtener la respuesta temporal del sistema ante excitaciones definidas por el usuario, se
utiliza el comando LSIM.
lsim(sys,u,t)
Este comando grafica la respuesta del sistema a la señal de entrada descripta por u y t. El
vector “t” consiste en muestras temporales regularmente espaciadas y “u” es una matriz,con tantas columnas como señales de entrada tenga el sistema y cuya i-ésima fila especifica
el valor de la entrada en el tiempo t(i).
Por ejemplo:
>> t = [0:0.01:10];
>> u = sin(t);
>> lsim(sys,u,t)
Archivos *.m
Los archivos *.m se utilizan para crear secuencias de comandos (scripts) y segmentos de
programa que pueden ser ejecutados al invocarlos desde la ventana de comando.
Nota: Esto es así, siempre y cuando el “path” especificado en MATLAB (“Current
Directory”) indique el directorio en el cual se ha guardado el archivo *.m; por defecto setrabaja en: C:\MATLAB6p1\work
Los archivos *.m también pueden ser utilizados para definir funciones.
La principal diferencia entre estas dos aplicaciones radica en que, en el primer caso, las
variables empleadas son globales (se definen en el Workspace); en tanto que para las
funciones, las variables son de tipo local, debiendo declararse una lista de argumentos deentrada a la función y sus valores de retorno.
La creación de un archivo *.m puede realizarse mediante cualquier editor dado que se trata
simplemente de un archivo de texto sin formato. MATLAB brinda la opción de utilizar su
propio editor de texto, el cual se puede encontrar en:
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 12/22
FileNewMfile
Se aconseja utilizar este editor para la creación de los archivos *.m debido a que optimiza
la corrección de las secuencias de comando, brindando además diversas opciones paradepuración de programas (debug).
El comando “run”, permite correr las secuencias de comandos y los programas generados,
desde el mismo editor.
SCRIPTS
Tomando como ejemplo el sistema visto anteriormente, podemos realizar la siguiente
secuencia de comandos para evaluar distintos valores de los parámetros m, b y k.
%PARAMETROS DE ENTRADA
% m (masa)
% b (friccion viscosa)
% k (constante del resorte)
%
% OPCIONES DE GRAFICACION
% (1) respuesta al impulso
% (2) respuesta al escalon
% (3) se muestran ambos transitorios
clc
m= input ('m: ');
b= input ('b: ');
k= input ('k: ');
num=[1];
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 13/22
den= [m b k];
sys= tf(num,den)
roots (den)
v= input ('seleccione opcion: ');
if v==1
impulse (sys)
elseif v==2
step (sys)
elseif v==3
subplot (2,1,1), impulse (sys)
subplot (2,1,2), step (sys)
end
Nota: Si escribimos: help “nombre del archivo *.m” en el “Command Window” deMATLAB, aparecerán las líneas de comentario que figuran antes de la primera instrucción.
Esto proporciona una referencia rápida del script o función generada.
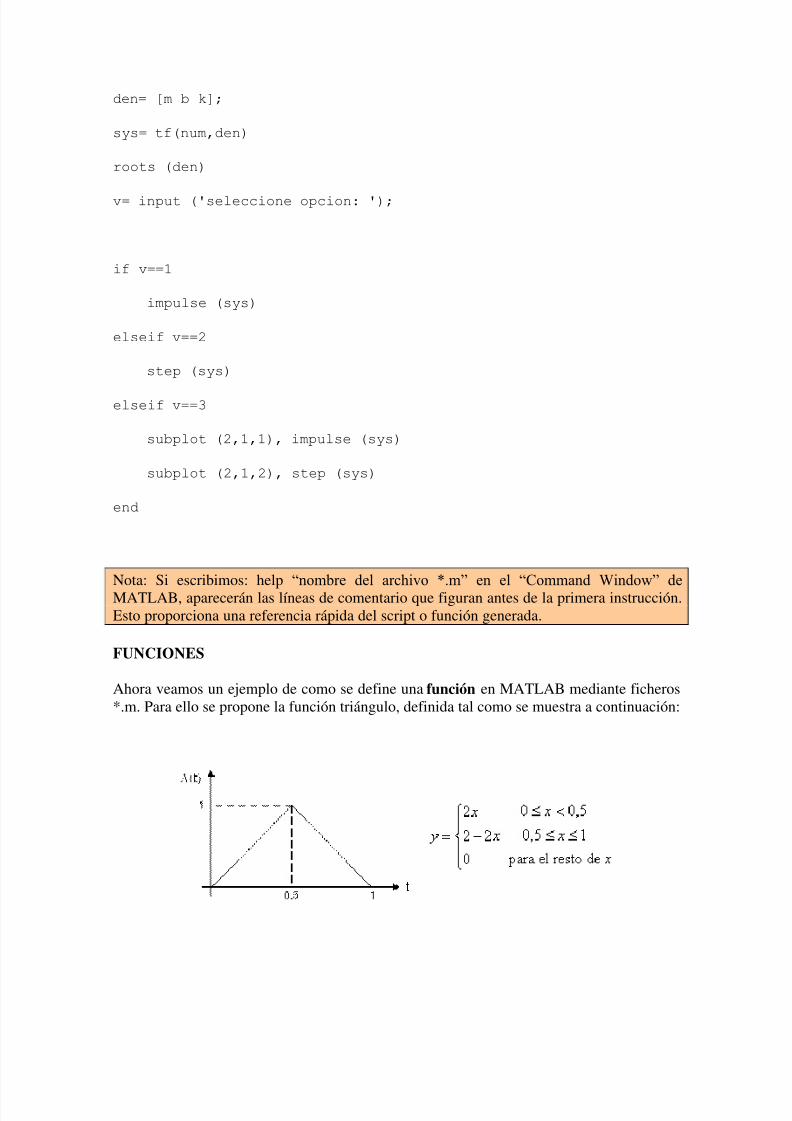
FUNCIONES
Ahora veamos un ejemplo de como se define una función en MATLAB mediante ficheros
*.m. Para ello se propone la función triángulo, definida tal como se muestra a continuación:
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 14/22
function [y]=triangle (x)
%Funcion Triangulo
%
% Definicion:
% y= 2x 0 <= x <0.5
% y= 2-2x 0.5 <= x <=1
for i= 1:length(x)
if 0<=x(i) & x(i)<0.5
y(i)=2*x(i);
elseif 0.5<=x(i) & x(i)<=1
y(i)=2-2*x(i);
else
y(i)=0;
end
end
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 15/22
La función puede ser guardada con un nombre arbitrario (nombre_de_la_función.m) en el
directorio de trabajo que hayamos elegido. Con este nombre, se invoca a la función desde
el Command Window de MATLAB (en este caso se eligió el nombre “triangle”,coincidente con el empleado en la definición de la función).
Por supuesto, esta función puede ser utilizada como excitación para nuestro sistema, como
vemos en el siguiente ejemplo:
>> t = [0:0.01:10];
>> u = triangle(t);
>> lsim(sys,u,t)
SIMULINK
Simulink es un paquete de software integrado a MATLAB que permite modelar, simular y
analizar sistemas dinámicos.
La simulación de un sistema dinámico se realiza, primero, creando un modelo gráfico del
sistema a ser simulado mediante el editor de Simulik y luego simulando su comportamiento
un rango de tiempo especificado.
Como ejemplo de aplicación, veremos como modelar y simular el sistema masa-resorte-
amortiguador.
Para abrir el editor de Simulink tenemos dos opciones.
1- Desde MATLAB: FileNewModel
2- Desde el “Simulink library browser”. El “Simulink library browser” se abre desde labarra de herramientas de MATLAB haciendo clic en el símbolo:
Finalmente, podemos abrir el editor de Simulink mediante FileNewModel, o bien
haciendo clic en el símbolo:
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 16/22
En la librería “Simulink” del library browser, se encuentran los bloques que utilizaremospara construir y analizar nuestro modelo. En particular estos bloques se hallan en los
menús: “Continuous”, “Sinks” y “Sources”.
El primer modelo que haremos nos permitirá evaluar la respuesta de nuestro sistema ante
una excitación del tipo escalón unitario, para ello arrastramos y soltamos los componentes
de la librería que se muestran en la tabla y los vinculamos entre sí mediante conectores.
Bloque Menú
Transfer Fcn Continuous
Step Sources
Scope Sinks
Haciendo doble-clic sobre los bloques podemos editar los parámetros de cada uno de ellos.
En el caso de la excitación, la definición por defecto es apropiada, en tanto que para el caso
de la función transferencia; Simulink pide que se introduzcan los vectores de coeficientes
del numerador y denominador (análogamente a lo visto para la definición de una función
transferencia desde el Command Window).
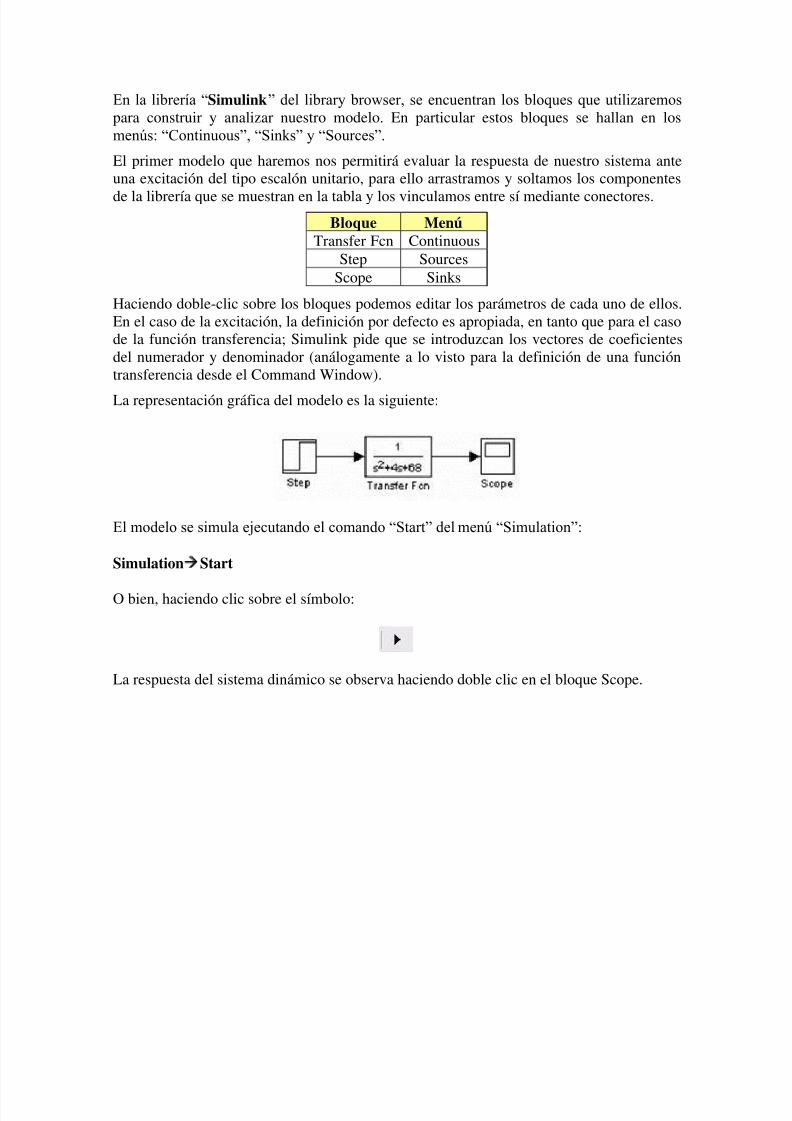
La representación gráfica del modelo es la siguiente:
El modelo se simula ejecutando el comando “Start” del menú “Simulation”:
SimulationStart
O bien, haciendo clic sobre el símbolo:
La respuesta del sistema dinámico se observa haciendo doble clic en el bloque Scope.

5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 17/22
Los parámetros de simulación pueden ser configurados mediante la opción “Simulation parameters…” del menú “Simulation”:
Simulation Simulation parameters…
Como puede observarse, en esta ventana se especifican el tiempo de simulación, método
numérico empleado y opciones de salida.
Interacción con el Workspace
Una de las capacidades más interesantes de Simulink es la posibilidad de interactuar con el
Workspace de MATLAB. Esto permite utilizar variables definidas en el Workspace como
excitaciones y escribir en el mismo los resultados de las simulaciones.
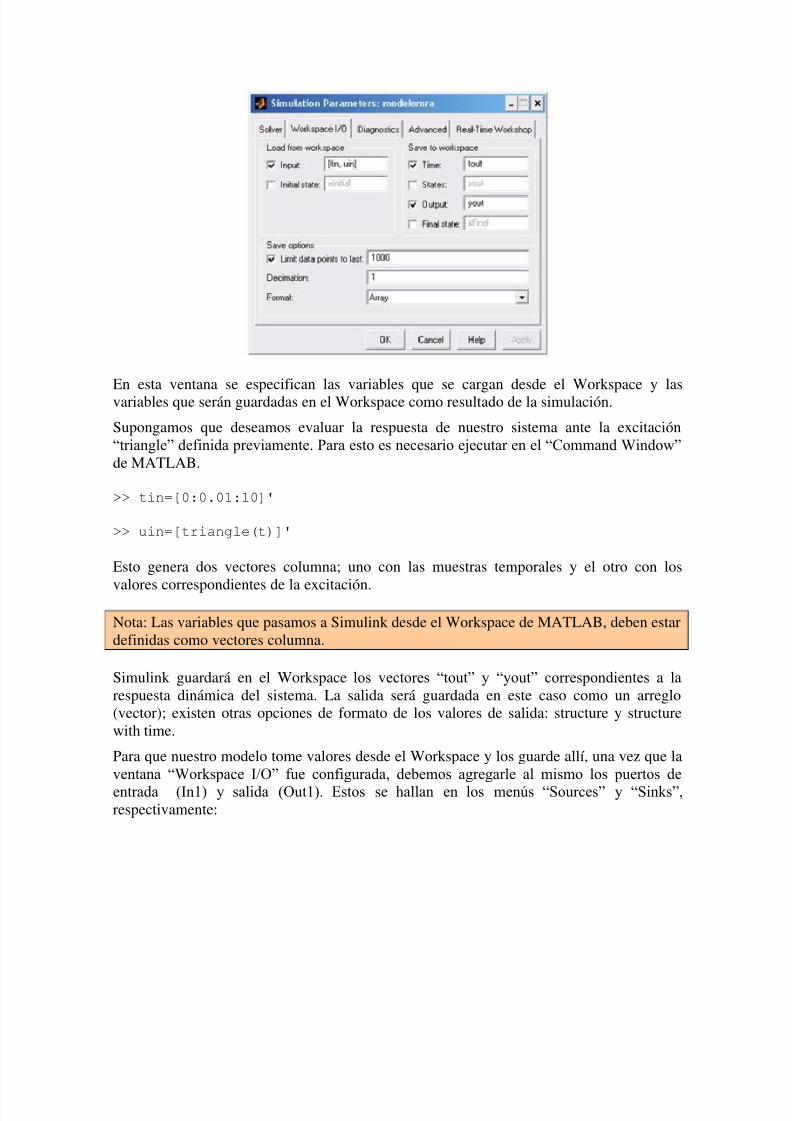
Una forma de realizar esto es configurando el tab “Workspace I/O” de la opción“Simulation parameters…”:
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 18/22
En esta ventana se especifican las variables que se cargan desde el Workspace y lasvariables que serán guardadas en el Workspace como resultado de la simulación.
Supongamos que deseamos evaluar la respuesta de nuestro sistema ante la excitación
“triangle” definida previamente. Para esto es necesario ejecutar en el “Command Window”de MATLAB.
>> tin=[0:0.01:10]'
>> uin=[triangle(t)]'
Esto genera dos vectores columna; uno con las muestras temporales y el otro con los
valores correspondientes de la excitación.
Nota: Las variables que pasamos a Simulink desde el Workspace de MATLAB, deben estar
definidas como vectores columna.
Simulink guardará en el Workspace los vectores “tout” y “yout” correspondientes a larespuesta dinámica del sistema. La salida será guardada en este caso como un arreglo
(vector); existen otras opciones de formato de los valores de salida: structure y structure
with time.
Para que nuestro modelo tome valores desde el Workspace y los guarde allí, una vez que la
ventana “Workspace I/O” fue configurada, debemos agregarle al mismo los puertos deentrada (In1) y salida (Out1). Estos se hallan en los menús “Sources” y “Sinks”,respectivamente:
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 19/22
Al simular el modelo, aparecen automáticamente en el listado de variables del Workspace
“tout” y “yout”.
Otra manera de lograr la interacción entre Simulink y las variables definidas en MATLAB
es mediante los bloques “From Workspace” y “To Workspace”. La utilización de estos
bloques permite prescindir de la configuración del tab “Workspace I/O”.
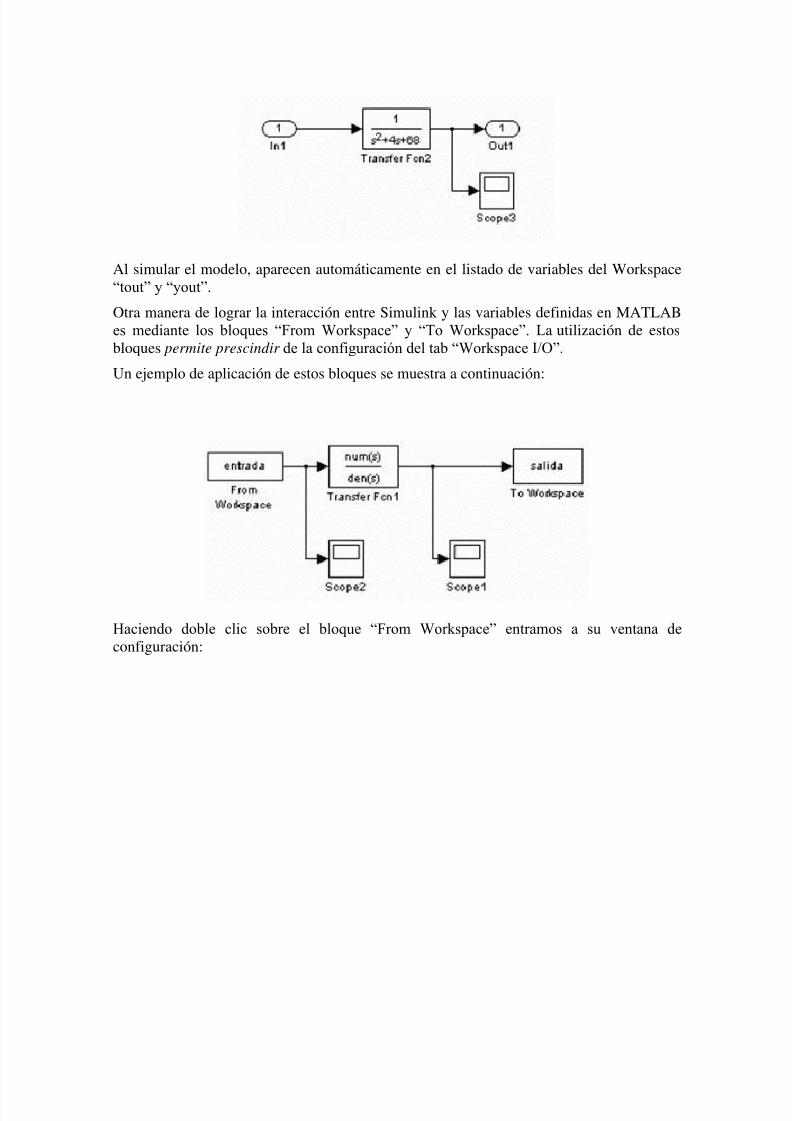
Un ejemplo de aplicación de estos bloques se muestra a continuación:
Haciendo doble clic sobre el bloque “From Workspace” entramos a su ventana deconfiguración:

5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 20/22
En este caso, “entrada” se define como un vector de n2; la primera columna corresponde
al vector tiempo (n es la cantidad de muestras temporales que tomamos) y la segunda
columna corresponde a la excitación (u(t)).
La definición de “entrada” fue efectuada en el Command Window de MATLAB de lasiguiente forma:
>> tin=[0:0.01:10]';
>> uin=[triangle(t)]';
>> entrada= [tin uin];
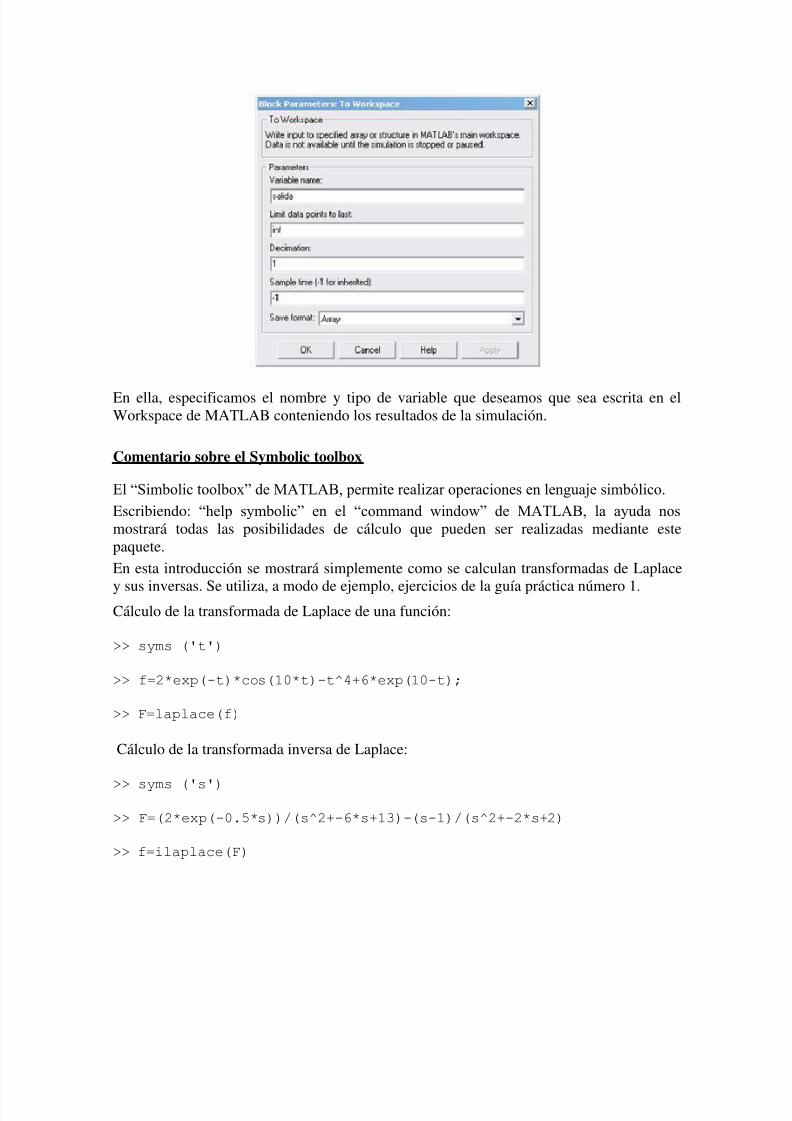
Para el bloque “To Workspace”, la ventana de configuración es:
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 21/22
En ella, especificamos el nombre y tipo de variable que deseamos que sea escrita en el
Workspace de MATLAB conteniendo los resultados de la simulación.
Comentario sobre el Symbolic toolbox
El “Simbolic toolbox” de MATLAB, permite realizar operaciones en lenguaje simbólico.
Escribiendo: “help symbolic” en el “command window” de MATLAB, la ayuda nosmostrará todas las posibilidades de cálculo que pueden ser realizadas mediante este
paquete.
En esta introducción se mostrará simplemente como se calculan transformadas de Laplace
y sus inversas. Se utiliza, a modo de ejemplo, ejercicios de la guía práctica número 1.
Cálculo de la transformada de Laplace de una función:
>> syms ('t')
>> f=2*exp(-t)*cos(10*t)-t^4+6*exp(10-t);
>> F=laplace(f)
Cálculo de la transformada inversa de Laplace:
>> syms ('s')
>> F=(2*exp(-0.5*s))/(s^2+-6*s+13)-(s-1)/(s^2+-2*s+2)
>> f=ilaplace(F)
5/10/2018 Int Matlab y Simulink - slidepdf.com
http://slidepdf.com/reader/full/int-matlab-y-simulink 22/22
Referencias
[1] Tutorial de MATLAB (MATLAB Help)
[2] “Aprenda MATLAB 6.1 como si estuviera en primero”. Javier García de Jalón José
Ignacio Rodríguez, Alfonso Brazales. Escuela Técnica Superior de Ingenieros Industriales.
Universidad Politécnica de Madrid
[3] Modelado, simulación y control de sistemas dinámicos. Parte I: Tutorial básico de
MATLAB. P.F. Puleston, F. Valenciaga. Departamento de electrotecnia. Facultad de
Ingeniería Universidad Nacional de La Plata.