instituto tecnológico de querétaro departamento de ... de... · prÁctica no.3 implementaciÓn de...
TRANSCRIPT

Instituto Tecnológico de Querétaro
Departamento de Ingeniería Eléctrica
y Electrónica
Guía de Prácticas de Laboratorio
Materia: Control I
Laboratorio de Ingeniería Electrónica
Santiago de Querétaro, Qro. Septiembre 2012
Elaboró
Ing. Agustín Barrera Navarro
Editora
Anayeli Sánchez Montoya
Departamento de Ingeniería Eléctrica y Electrónica
Av. Tecnológico S/N, Esq. M. Escobedo, Col. Centro,
CP.76000 Tel: 2274400 ext. 4418

CONTENIDO PRÁCTICA No.1 IDENTIFICACIÓN Y VALIDACIÓN DE LA FUNCIÓN DE
TRANSFERENCIA DE UN MOTOR DE CORRIENTE DIRECTA DE IMÁN
PERMANENTE EN EL DOMINIO DEL TIEMPO .............................................................. 5
1. OBJETIVO .................................................................................................................. 5
2. INTRODUCCIÓN ....................................................................................................... 5
3. MARCO TEÓRICO .................................................................................................... 5
4. EQUIPO Y MATERIALES ........................................................................................ 5
5. METODOLOGÍA ........................................................................................................ 5
PRÁCTICA No.2 IDENTIFICACIÓN Y VALIDACIÓN DE LA FUNCIÓN DE
TRANSFERENCIA DE UN SISTEMA ELÉCTRICO MEDIANTE RESPUESTA EN
FRECUENCIA ....................................................................................................................... 7
1. OBJETIVO .................................................................................................................. 7
2. INTRODUCCIÓN ....................................................................................................... 7
3. MARCO TEÓRICO .................................................................................................... 7
4. EQUIPO Y MATERIALES ........................................................................................ 7
5. METODOLOGÍA ........................................................................................................ 7
PRÁCTICA No.3 IMPLEMENTACIÓN DE FUNCIONES DE TRANSFERENCIA CON
AMPLIFICADORES OPERACIONALES ............................................................................ 9
1. OBJETIVO .................................................................................................................. 9
2. INTRODUCCIÓN ....................................................................................................... 9
3. MARCO TEÓRICO .................................................................................................... 9
4. EQUIPO Y MATERIALES ........................................................................................ 9
5. METODOLOGÍA ........................................................................................................ 9
PRÁCTICA No.4 ANÁLISIS DE ESTABILIDAD UTILIZANDO EL CRITERIO DE
ROUTH EN UN SISTEMA EN LAZO CERRADO ............................................................. 9
1. OBJETIVO .................................................................................................................. 9
2. INTRODUCCIÓN ....................................................................................................... 9
3. MARCO TEÓRICO .................................................................................................... 9
4. EQUIPO Y MATERIALES ........................................................................................ 9
5. METODOLOGÍA ........................................................................................................ 9
PRÁCTICA No.5 DISEÑO E IMPLEMENTACIÓN DE CONTROL PROPORCIONAL
VÍA LUGAR GEOMÉTRICO DE LA RAÍZ ........................................................................ 9
1. OBJETIVO .................................................................................................................. 9
2. INTRODUCCIÓN ....................................................................................................... 9
3. MARCO TEÓRICO .................................................................................................... 9
4. EQUIPO Y MATERIALES ........................................................................................ 9
5. METODOLOGÍA ........................................................................................................ 9
PRÁCTICA No.6 DISEÑO E IMPLEMENTACIÓN DE CONTROLADOR PI O PID VÍA
LUGAR GEOMÉTRICO DE LA RAÍZ PARA REGULAR LA VELOCIDAD DE UN
MOTOR DE CD DE IMÁN PERMANENTE. ...................................................................... 9
1. OBJETIVO .................................................................................................................. 9
2. INTRODUCCIÓN ....................................................................................................... 9
3. MARCO TEÓRICO .................................................................................................... 9
4. EQUIPO Y MATERIALES ........................................................................................ 9
5. METODOLOGÍA ...................................................................................................... 10
PRÁCTICA No.7 DISEÑO E IMPLEMENTACIÓN DE UN COMPENSADOR DE
ADELANTO DE FASE PARA MEJORAR EL DESEMPEÑO DE UN CONTROLADOR
PI O PID VÍA LUGAR GEOMÉTRICO DE LA RAÍZ PARA REGULAR LA
VELOCIDAD DE UN MOTOR DE CD DE IMÁN PERMANENTE. .............................. 17
1. OBJETIVO ................................................................................................................ 17
2. INTRODUCCIÓN ..................................................................................................... 17
3. MARCO TEÓRICO .................................................................................................. 17
4. EQUIPO Y MATERIALES ...................................................................................... 17
5. METODOLOGÍA ...................................................................................................... 18
PRÁCTICA No.8 DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR POR
VARIABLES DE ESTADO CON EFECTO INTEGRAL PARA REGULAR LA
VELOCIDAD DE UN MOTOR DE CD DE IMÁN PERMANENTE ............................... 19
1. OBJETIVO ................................................................................................................ 19
2. INTRODUCCIÓN ..................................................................................................... 19
3. MARCO TEÓRICO .................................................................................................. 19
4. EQUIPO Y MATERIALES ...................................................................................... 19
5. METODOLOGÍA ...................................................................................................... 20

PRÁCTICA No.9 DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR PID
DIGITAL PARA REGULAR LA VELOCIDAD DE UN MOTOR DE CD DE IMÁN
PERMANENTE MEDIANTE PC O MICROCONTROLADOR ....................................... 19
1. OBJETIVO ................................................................................................................ 19
2. INTRODUCCIÓN ..................................................................................................... 19
3. MARCO TEÓRICO .................................................................................................. 19
4. EQUIPO Y MATERIALES ...................................................................................... 19
5. METODOLOGÍA ...................................................................................................... 20
PRÁCTICA No.10 DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR PID
DIGITAL PARA REGULAR LA TEMPERATURA DE UN HORNO MEDIANTE PC O
MICROCONTROLADOR ................................................................................................... 19
1. OBJETIVO ................................................................................................................ 19
2. INTRODUCCIÓN ..................................................................................................... 19
3. MARCO TEÓRICO .................................................................................................. 19
4. EQUIPO Y MATERIALES ...................................................................................... 19
5. METODOLOGÍA ...................................................................................................... 20
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 1
Página 5 de 24
PRÁCTICA No.1. IDENTIFICACIÓN Y VALIDACIÓN DE
LA FUNCIÓN DE TRANSFERENCIA DE UN MOTOR DE
CORRIENTE DIRECTA DE IMÁN PERMANENTE EN EL
DOMINIO DEL TIEMPO
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO El estudiante comprenderá la utilidad que tienen los métodos de identificación paramétrica
en el dominio del tiempo sobre el modelado basado en leyes físicas de sistemas LTI.
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES
Motor de c.d de Imán Permanente
Convertidor de Frecuencia a Voltaje LM2907 y circuitería anexa
Encoder
Circuito Sujetador
Transistor TIP 120 o equivalente
Amplificadores Operacionales
Lm555
Osciloscopio con puerto USB y dos Puntas
Fuente de Alimentación
Excel
Matlab
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 1
Página 6 de 24
5.1.1Construir Un circuito para medir la velocidad del motor de c.d. utilizando los
componentes indicados en el apartado Materiales.
5.1.2 Realizar un Barrido de voltajes para obtener la curva de Velocidad- Voltaje del
motor.
5.1.3 Aplicar Una señal de Entrada de Tipo Escalón de un valor tal que se encuentre
en la parte central de la zona más lineal de la curva de respuesta Velocidad-Voltaje del
motor de c.d..
Paralelamente, realizar la medición del voltaje de entrada al motor y el voltaje de salida
del convertidor de frecuencia voltaje (velocidad) en cada canal del osciloscopio.
5.1.4 Detener la captura de la Información antes de que el trazo en la pantalla del
osciloscopio termine. Es necesario asegurarse que el sistema ha estabilizado.
5.1.5 Guardar la información del osciloscopio en la USB, exportar a Excel y realizar la
identificación de la forma indicada en Clase.
5.1.6 Validar el modelo mediante simulación y prueba del sistema Físico.
5.1.7 Resultados a Reportar:
- Función de Transferencia identificada y tipo
- Validación vía simulación y Práctica
- Constantes de Tiempo del sistema
- Ganancia Estática
- Retardo
- Tiempo de Asentamiento
- Determinación de No linealidades del sistema

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 2
Página 7 de 24
PRÁCTICA No.2. IDENTIFICACIÓN Y VALIDACIÓN DE
LA FUNCIÓN DE TRANSFERENCIA DE UN SISTEMA
ELÉCTRICO MEDIANTE RESPUESTA EN FRECUENCIA
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO El estudiante comprenderá la utilidad que tiene el diagrama de Bode en la identificación en
el dominio de la Frecuencia sobre el modelado basado en leyes físicas de sistemas LTI.
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES - Amplificador Operacional
- Capacitores y Resistencias (Ver Indicaciones)
- Osciloscopio y dos Puntas
- Fuente de Alimentación
- Generador de Funciones
- Excel y Matlab
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
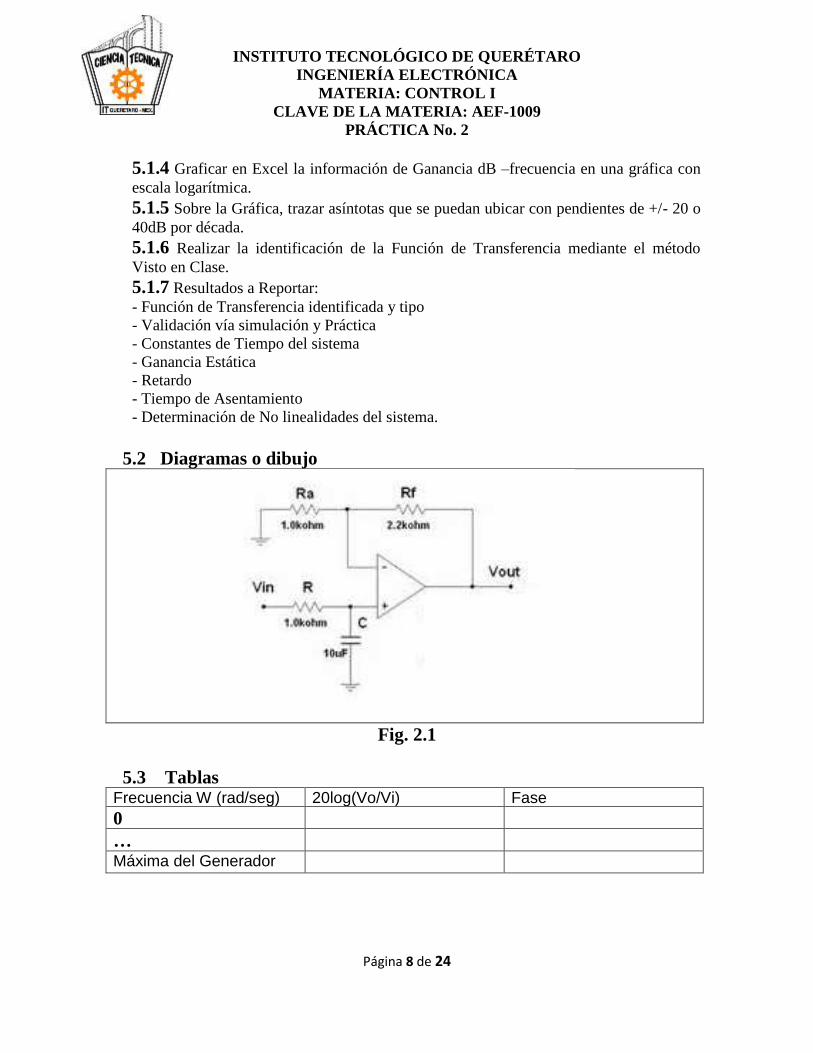
5.1.1 Construir el siguiente circuito (Fig. 2.1):
5.1.2 Realizar un barrido de Frecuencias con señal senoidal al circuito proporcionado,
mediante un generador de Funciones desde la mínima Frecuencia hasta la máxima
posible disponible en el generador.
La amplitud de la entrada (Vi) se fijara en 1 volt pico a pico.
5.1.3 Realizar las mediciones de amplitud de salida (Vo) y desfasamiento con respecto
a la entrada e ir registrando en una tabla como la propuesta en el punto 5.3
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 2
Página 8 de 24
5.1.4 Graficar en Excel la información de Ganancia dB –frecuencia en una gráfica con
escala logarítmica.
5.1.5 Sobre la Gráfica, trazar asíntotas que se puedan ubicar con pendientes de +/- 20 o
40dB por década.
5.1.6 Realizar la identificación de la Función de Transferencia mediante el método
Visto en Clase.
5.1.7 Resultados a Reportar:
- Función de Transferencia identificada y tipo
- Validación vía simulación y Práctica
- Constantes de Tiempo del sistema
- Ganancia Estática
- Retardo
- Tiempo de Asentamiento
- Determinación de No linealidades del sistema.
5.2 Diagramas o dibujo
Fig. 2.1
5.3 Tablas Frecuencia W (rad/seg) 20log(Vo/Vi) Fase
0
… Máxima del Generador
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 3
Página 9 de 24
PRÁCTICA No.3. IMPLEMENTACIÓN DE FUNCIONES DE
TRANSFERENCIA CON AMPLIFICADORES
OPERACIONALES
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO Que el alumno comprenda que varios sistemas (mecánicos, hidráulicos, térmicos…etc.),
pueden tener estructuralmente una misma función de transferencia y que esta puede ser
implementada en el laboratorio mediante circuitos electrónicos.
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES
Amplificadores Operacionales
Capacitores y Resistencias (determinar por el estudiante)
Osciloscopio y dos Puntas
Fuente de Alimentación
Excel
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1 Implementar la Siguiente Función de Transferencia con amplificadores
operacionales mediante el procedimiento visto en Clase:

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 3
Página 10 de 24
5.1.2 Aplicar una señal de entrada escalón de 1v y capturar en el osciloscopio la
información de entrada y salida y detener el trazo antes de finalizar el barrido del cursor.
5.1.3 Realizar la simulación de la función de transferencia en Matlab ante la misma
entrada escalón.
5.1.4 Realizar mediciones en el osciloscopio en tiempo y voltaje y comparar con lo
mostrado en la simulación.
5.1.5 Resultados a Reportar:
- ¿Existe relación entre lo físico y lo simulado y porque?
- ¿Es posible trasladar un sistema físico a un sistema eléctrico?
- ¿Qué ventajas tiene la implementación electrónica sobre un sistema original?
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 4
Página 9 de 24
PRÁCTICA No.4. ANÁLISIS DE ESTABILIDAD
UTILIZANDO EL CRITERIO DE ROUTH EN UN SISTEMA
EN LAZO CERRADO
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO Que el estudiante comprenda la importancia que puede tener la variación de un parámetro
en el sistema de control para modificar su desempeño desde condiciones de operación
normales hasta la inestabilidad.
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES Amplificadores Operacionales
Capacitores y Resistencias
Osciloscopio con dos Puntas
Fuente de Alimentación
Matlab
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1Implementar con amplificadores operacionales la siguiente función de
transferencia de trayectoria directa:

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 4
Página 10 de 24
5.1.2 Determinar analíticamente el rango de valores de K que permiten mantener al
sistema estable.
5.1.3 Fijar los valores del punto anterior en el circuito físico y comprobar lo establecido
por el criterio de Routh.
5.1.4 Validar mediciones y cálculos con simulación en Matlab.
5.1.5 Resultados a Reportar
- ¿Qué valor límite de la ganancia k permite una respuesta amortiguada?
- ¿Qué ocurre con la salida del sistema si la ganancia k se fija en el límite de estabilidad?
- ¿Qué ocurre con los polos en lazo cerrado al variar la ganancia k?
- ¿Qué efecto se presenta en la respuesta a moverse los polos cada vez más a la izquierda
del eje imaginario del plano S?

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 5
Página 9 de 24
PRÁCTICA No.5. DISEÑO E IMPLEMENTACIÓN DE
CONTROL PROPORCIONAL VÍA LUGAR GEOMÉTRICO
DE LA RAÍZ
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO Que el estudiante aplique la técnica del análisis de lugar geométrico de la Raíz para diseñar
un control proporcional para regular la velocidad de un motor de CD de corriente directa
(Practica 1).
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES Amplificadores Operacionales
Capacitores y Resistencias
Motor de CD de Imán Permanente
Convertidor de Frecuencia a Voltaje LM2907 y circuitería anexa
Encoder
Circuito Sujetador
Transistor TIP 120 o equivalente
Lm555
Osciloscopio con puerto USB y dos Puntas
Fuente de Alimentación
Excel
Matlab
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 5
Página 10 de 24
5.1.1Utilizando la Planta de la practica 1, construir un control proporcional (lazo
Cerrado).
5.1.2 Utilizando el método de LGR, diseñar un control Proporcional que permita
cumplir con los parámetros de desempeño de sobrepaso menor del 10% y tiempo de
asentamiento menor de 1segundo ante una entrada escalón del sistema de control.
5.1.3 Validar con simulación.
5.1.4 Resultados a Reportar:
¿Es posible realizar el diseño utilizando LGR?
¿Qué problemas se presentan al utilizar dicho método?
¿El error en estado estable en qué valor se fija?

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 6
Página 9 de 24
PRÁCTICA No.6. DISEÑO E IMPLEMENTACIÓN DE
CONTROLADOR PI O PID VÍA LUGAR GEOMÉTRICO DE
LA RAÍZ PARA REGULAR LA VELOCIDAD DE UN
MOTOR DE CD DE IMÁN PERMANENTE.
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO Que el estudiante aplique la técnica del análisis de lugar geométrico de la Raíz para diseñar
un control PI o PID para regular la velocidad de un motor de CD de corriente directa
(Practica 1).
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES Amplificadores Operacionales
Capacitores y Resistencias
Motor de CD de Imán Permanente
Convertidor de Frecuencia a Voltaje LM2907 y circuitería anexa
Encoder
Circuito Sujetador
Transistor TIP 120 o equivalente
Lm555
Osciloscopio con puerto USB y dos Puntas
Fuente de Alimentación
Excel
Matlab

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 6
Página 10 de 24
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1Utilizando la Planta de la practica 1, construir un control PI o PID (lazo Cerrado).
5.1.2 Utilizando el método de LGR, diseñar un control PI o PID que permita cumplir
con los parámetros de desempeño de sobrepaso menor del 10%, tiempo de asentamiento
menor de 1segundo y error en estado estable de cero ante una entrada escalón del
sistema de control.
5.1.3 Validar con simulación.
5.1.4 Resultados a Reportar:
¿Es posible realizar el diseño utilizando LGR?
¿Qué problemas se presentan al utilizar dicho método?
¿El error en estado estable en qué valor se fija?
¿Cuándo el sistema estabiliza, que valor genera la acción proporcional?
¿Cuándo el sistema estabiliza, que valor genera la acción Integral?
¿Si se incorporó acción derivativa, que contribución tiene?
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 7
Página 17 de 24
PRÁCTICA No.7. DISEÑO E IMPLEMENTACIÓN DE UN
COMPENSADOR DE ADELANTO DE FASE PARA
MEJORAR EL DESEMPEÑO DE UN CONTROLADOR PI O
PID VÍA LUGAR GEOMÉTRICO DE LA RAÍZ PARA
REGULAR LA VELOCIDAD DE UN MOTOR DE CD DE
IMÁN PERMANENTE.
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO Que el estudiante aplique la técnica del análisis de lugar geométrico de la Raíz para diseñar
un compensador que mejore el desempeño de un control PI o PID. (Usar sistema de
Practica 5)
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES Amplificadores Operacionales
Capacitores y Resistencias
Motor de CD de Imán Permanente
Convertidor de Frecuencia a Voltaje LM2907 y circuitería anexa
Encoder
Circuito Sujetador
Transistor TIP 120 o equivalente
Lm555
Osciloscopio con puerto USB y dos Puntas
Fuente de Alimentación
Excel
Matlab

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 7
Página 18 de 24
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1Utilizando la Planta de la práctica 1 o 5, construir un compensador en adelanto de
fase (lazo Cerrado).
5.1.2 Utilizando el método de LGR, diseñar un compensador de adelanto de fase, que
permita mejorar el desempeño transitorio del controlador de la practica 5.
5.1.3 Validar con simulación.
5.1.4 Resultados a Reportar:
¿Es posible realizar el diseño utilizando LGR?
¿Qué problemas se presentan al utilizar dicho método?
¿Qué ocurre con el sobrepaso ante una entrada escalón?
¿Qué ocurre con el tiempo de asentamiento ante una entrada escalón?
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 8
Página 19 de 24
PRÁCTICA No.8. DISEÑO E IMPLEMENTACIÓN DE UN
CONTROLADOR POR VARIABLES DE ESTADO CON
EFECTO INTEGRAL PARA REGULAR LA VELOCIDAD DE
UN MOTOR DE CD DE IMÁN PERMANENTE
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO Que el estudiante aplique la técnica de control por retroalimentación de estado con efecto
integrador para regular la velocidad de un motor de CD de imán permanente. (Usar sistema
de Practica 5)
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES Amplificadores Operacionales
Capacitores y Resistencias
Motor de CD de Imán Permanente
Convertidor de Frecuencia a Voltaje LM2907 y circuitería anexa
Encoder
Circuito Sujetador
Transistor TIP 120 o equivalente
Lm555
Osciloscopio con puerto USB y dos Puntas
Fuente de Alimentación
Excel
Matlab

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 8
Página 20 de 24
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1Utilizando la Planta de la practica 1 o 5, construir un sistema de control por
variables de estado con efecto integrador en el que las variables a considerar son
Corriente del motor y velocidad del motor.
5.1.2 Proponer estrategia de medición de corriente del motor.
5.1.3 Determinar las ganancias de retroalimentación K1, K2 (Retroalimentación de
estado) y Ke (ganancia de integrador) si las especificaciones de desempeño son de un
tiempo de asentamiento de 2 segundos y sobrepaso de 1% ante una entrada escalón.
5.1.4 Validar con simulación.
5.1.5 Resultados a Reportar:
¿Qué ocurre con las especificaciones de desempeño?
¿Qué problemas se presentan al utilizar dicho método?
¿Qué diferencias existen entre esta estrategia de diseño y el LGR?
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 9
Página 19 de 24
PRÁCTICA No.9. DISEÑO E IMPLEMENTACIÓN DE UN
CONTROLADOR PID DIGITAL PARA REGULAR LA
VELOCIDAD DE UN MOTOR DE CD DE IMÁN
PERMANENTE MEDIANTE PC O MICROCONTROLADOR
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO Conocer el diseño y la implementación de un controlador PID digital para regular la
velocidad de un motor de CD de imán permanente mediante PC o micro controlador
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES Amplificadores Operacionales
Capacitores y Resistencias
Motor de CD de Imán Permanente
Convertidor de Frecuencia a Voltaje LM2907 y circuitería anexa
Encoder
Circuito Sujetador
Transistor TIP 120 o equivalente
Lm555
Osciloscopio con puerto USB y dos Puntas
Fuente de Alimentación
Excel
Matlab
LabVIEW
Compact Field Point o DAQ NI USB 6009

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 9
Página 20 de 24
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1Incorporar al sistema de la practica 5, removiendo su controlador, el sistema de
adquisición NIUSB 6009 o el Compact Field Point.
5.1.2 Diseñar un controlador PID continuo que cumpla con las especificaciones de
sobrepaso de 10% y tiempo de asentamiento menor a 1 segundo.
5.1.3 Seleccionar el periodo de muestreo utilizando del Teorema de Muestreo de
Shannon - Nyquist.
5.1.4 Digitalizar el controlador Continuo diseñado usando el tiempo de muestreo
prefijado.
5.1.5 Programar en LabVIEW o en micro controlador la función de transferencia
discreta utilizando las propiedades de la transformada Z.
5.1.6 Validar Mediante Simulación.
5.1.7 Resultados a Reportar:
-Comportamiento transitorio y estático.
-Diferencia entre el comportamiento continuo y discreto utilizando simulación.
- Conclusión sobre la implementación alambrada y la programada.
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 10
Página 19 de 24
PRÁCTICA No.10. DISEÑO E IMPLEMENTACIÓN DE UN
CONTROLADOR PID DIGITAL PARA REGULAR LA
TEMPERATURA DE UN HORNO MEDIANTE PC O
MICROCONTROLADOR
No. DE ALUMNOS: DURACIÓN DE LA PRÁCTICA:
1. OBJETIVO Conocer el diseño e implementación de un controlador PID digital para regular la
temperatura de un horno mediante PC o micro controlador.
2. INTRODUCCIÓN N/A
3. MARCO TEÓRICO N/A
4. EQUIPO Y MATERIALES Amplificadores Operacionales
Capacitores y Resistencias
Cámara de Acrílico de 10cmX10cmX10cm
Transistor TIP 120 o equivalente
Calefactor de 100W
3 Sensores LM35
Lm555
Osciloscopio con puerto USB y dos Puntas
Fuente de Alimentación
Excel
Matlab
LabVIEW
Compact Field Point o DAQ NI USB 6009

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELECTRÓNICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 10
Página 20 de 24
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1Incorporar a la cámara de acrílico los sensores y su interface con la DAQ NI USB
6009 o el Compact Field Point.
5.1.2 Diseñar un controlador PID continuo que cumpla con las especificaciones de
sobrepaso de 10% y tiempo de asentamiento menor a 5 minutos.
5.1.3 Seleccionar el periodo de muestreo utilizando del Teorema de Muestreo de
Shannon - Nyquist.
5.1.4 Digitalizar el controlador Continuo diseñado usando el tiempo de muestreo
prefijado.
5.1.5 Programar en LabVIEW o en micro controlador la función de transferencia
discreta utilizando las propiedades de la transformada Z.
5.1.6 Validar Mediante Simulación.
5.1.7 Resultados a Reportar:
-Comportamiento transitorio y estático.
-Diferencia entre el comportamiento continuo y discreto utilizando simulación.
- Diferencias que existen entre el control de temperatura de un horno y la velocidad de
un motor de c.d.