informe fms u03_atamiranolezanomartinezmendeztorres
TRANSCRIPT
DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA
TEMA: Partes principales, características técnicas, accesorios y seguridades de manipuladores robóticos.
Séptimo NIVEL PARALELO “B”
NOMBRES:
Altamirano Víctor
Lezano Cesar
Martínez Azucena
Méndez Gariela
Torres Sophia
DOCENTE ING. Fausto Acuña
Latacunga, 07 de julio del 2015
2
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
ÍndiceTEMA:......................................................................................................................6
OBJETIVOS:............................................................................................................6
MATERIALES Y EQUIPOS:.....................................................................................6
MARCO TEÓRICO...................................................................................................7
Mecánica del robot.................................................................................................7
Muñeca:.............................................................................................................7
Brazo:................................................................................................................7
Brazo de oscilación:...........................................................................................7
Columna giratoria..............................................................................................7
Base del Robot:.................................................................................................8
Funcionamiento de los botones de paro del panel de control...............................9
Stop.......................................................................................................................9
Parada de emergencia..........................................................................................9
Panel de control....................................................................................................9
APLICACIONES..................................................................................................11
INDUSTRIA DEL TRANSPORTE:...................................................................11
MANIPULACIÓN DE METALES:.....................................................................11
INDUSTRIA DE LA MADERA:.........................................................................12
INDUSTRIA ALIMENTARIA:............................................................................12
INDUSTRIA AUTOMOTRIZ:............................................................................13
3
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
LA INDUSTRIA DE LA CONSTRUCCIÓN......................................................13
Características Técnicas.....................................................................................14
Alcance Horizontal:..........................................................................................14
Tamaño de la Pinza:........................................................................................14
Peso Manipulable:...........................................................................................14
Área de Trabajo Barrida:.................................................................................14
Resolución, precisión y repetitividad:...............................................................14
Capacidad de carga.........................................................................................15
Cargas por Oscilación.....................................................................................16
Temperatura ambiental....................................................................................17
Datos básicos de los KUKA KR 5 Arc:.............................................................17
Consideraciones ambientales..........................................................................18
Cables de unión...............................................................................................19
Datos de ejes...................................................................................................19
Direcciones de los ejes....................................................................................20
Características técnicas básicas del KUKA KR16L.........................................21
CONCLUSIONES...................................................................................................22
Bibliografía.............................................................................................................23
Índice de Figuras.
Figura 1 parte principales de mecánica de un robot................................................6
Figura 2 Movimientos en los diferentes ejes............................................................7
4
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Figura 3 Botones de paro del panel principal...........................................................8
Figura 4 Panel de control.........................................................................................9
Figura 5. Precisión, Resolución y repetitividad.......................................................14
Figura 6. Carga máxima de un KUKA....................................................................15
Figura 7. Ejes de un brazo robótico........................................................................19
Figura 8. Dimensiones de alcance de un robot KUKA..........................................20
Figura 9. Características básicas del robot KUKA KR16.......................................21
Índice de Tablas
Tabla 1. Cargas Por oscilación..............................................................................15
Tabla 2. Temperatura ambiental............................................................................16
Tabla 3. Características técnicas del Robot KUKA Arc..........................................16
Tabla 4. Consideraciones Ambientales..................................................................17
Tabla 5. Cables de unión.......................................................................................18
Tabla 6. Datos de Ejes...........................................................................................18
Tabla 7. Características del Robot KUKA KR16....................................................20
Tabla 8 Pinzas........................................................................................................21
5
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
PRÁCTICA N°01
TEMA:Partes principales, características técnicas, accesorios y seguridades de
manipuladores robóticos.
OBJETIVOS:1. Reconocer las principales partes del Robot KUKA KR16.
2. Identificar y describir las principales partes del Robot KUKA KR16.
3. Investigar y analizar las características técnicas del brazo robótico KUKA
mediante la utilización de los manuales para no sobrepasar los parámetros
establecidos por el fabricante.
4. Describir los principales accesorios del Robot KUKA.
5. Describir los software que puede utilizar los Robots KUKA.
6. Conocer las principales aplicaciones de los accesorios de los Robots
KUKA.
7. Conocer las principales aplicaciones de los software de los Robots KUKA.
8. Identificar las principales seguridades que tiene el robot KUKA.
9. Conocer acerca de las seguridades tanto del robot como del operario
que rigen para la correcta utilización del robot KUKA.
MATERIALES Y EQUIPOS:1. Brazo robótico KUKA KR16
2. Datasheet de brazo robótico KUKA KR16
3. Manual de operación y seguridad
4. Accesorios del brazo robótico KUKA KR16
6
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
MARCO TEÓRICO
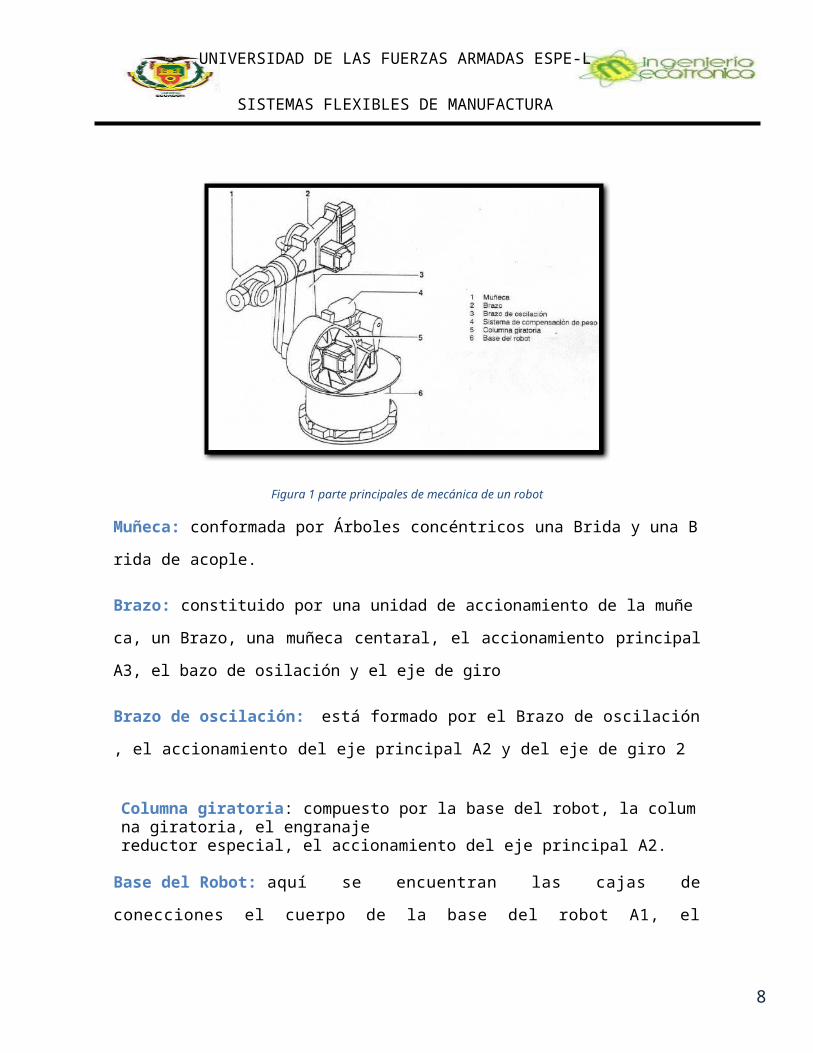
MECÁNICA DEL ROBOTEl robot costa de una base fija (6), sobre la cual gira, alrededor de un eje vertical,
la “la columna giratoria” (5) con un brazo de oscilación (3), un brazo (2), y una
muñeca (1).
Figura 1 parte principales de mecánica de un robot
Muñeca: conformada por Árboles concéntricos una Brida y una Brida de acople.
Brazo: constituido por una unidad de accionamiento de la muñeca, un Brazo, una
muñeca centaral, el accionamiento principal A3, el bazo de osilación y el eje de giro
Brazo de oscilación: está formado por el Brazo de oscilación, el accionamiento
del eje principal A2 y del eje de giro 2
Columna giratoria: compuesto por la base del robot, la columna giratoria, el engranaje reductor especial, el accionamiento del eje principal A2.
7
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Base del Robot: aquí se encuentran las cajas de conecciones el cuerpo de la
base del robot A1, el engranaje reductor especial, a brida los taladors de
ajuste, la brida de pie y los taladros de fijación.
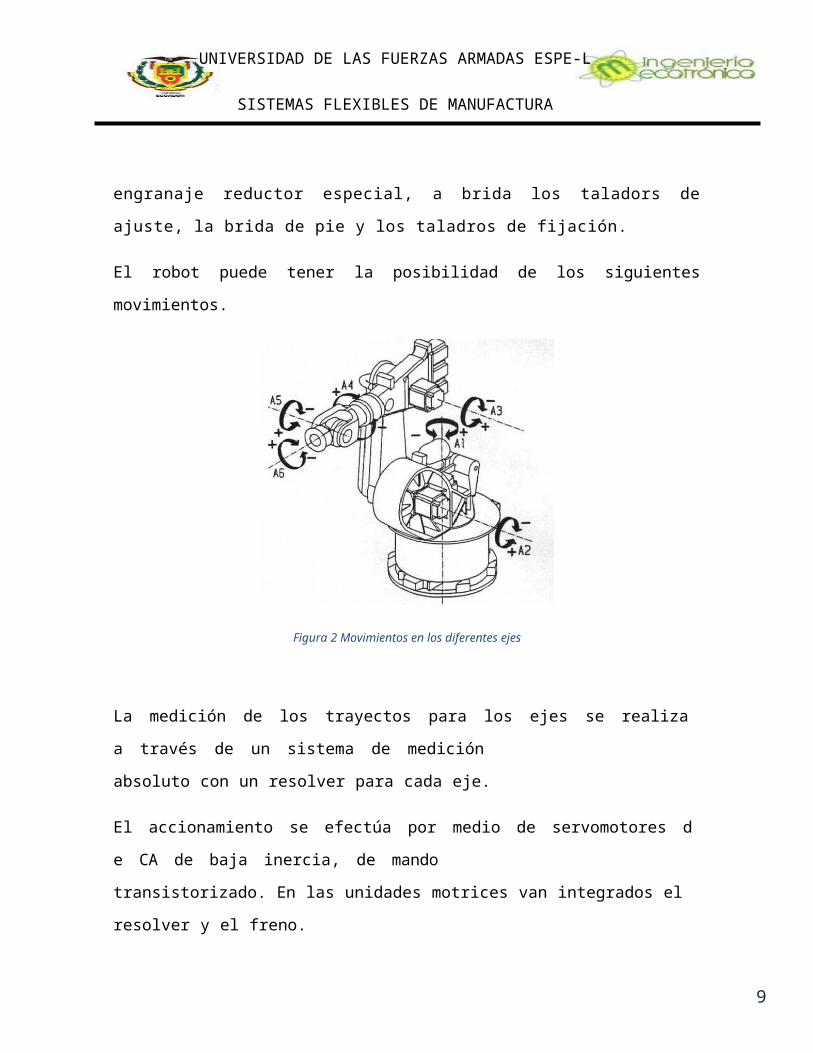
El robot puede tener la posibilidad de los siguientes movimientos.
Figura 2 Movimientos en los diferentes ejes
La medición de los trayectos para los ejes se realiza a través de un sistema de
medición absoluto con un resolver para cada eje.
El accionamiento se efectúa por medio de servomotores de CA de baja inercia,
de mando
transistorizado. En las unidades motrices van integrados el resolver y el freno.
El campo de rabajo de robots es limitado en todos los ejes por medio del fin de
carrera software, además limitandose los ejes 1,2,3,5 por medio de topes finales
mecánicos de absoción de energía.
8
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
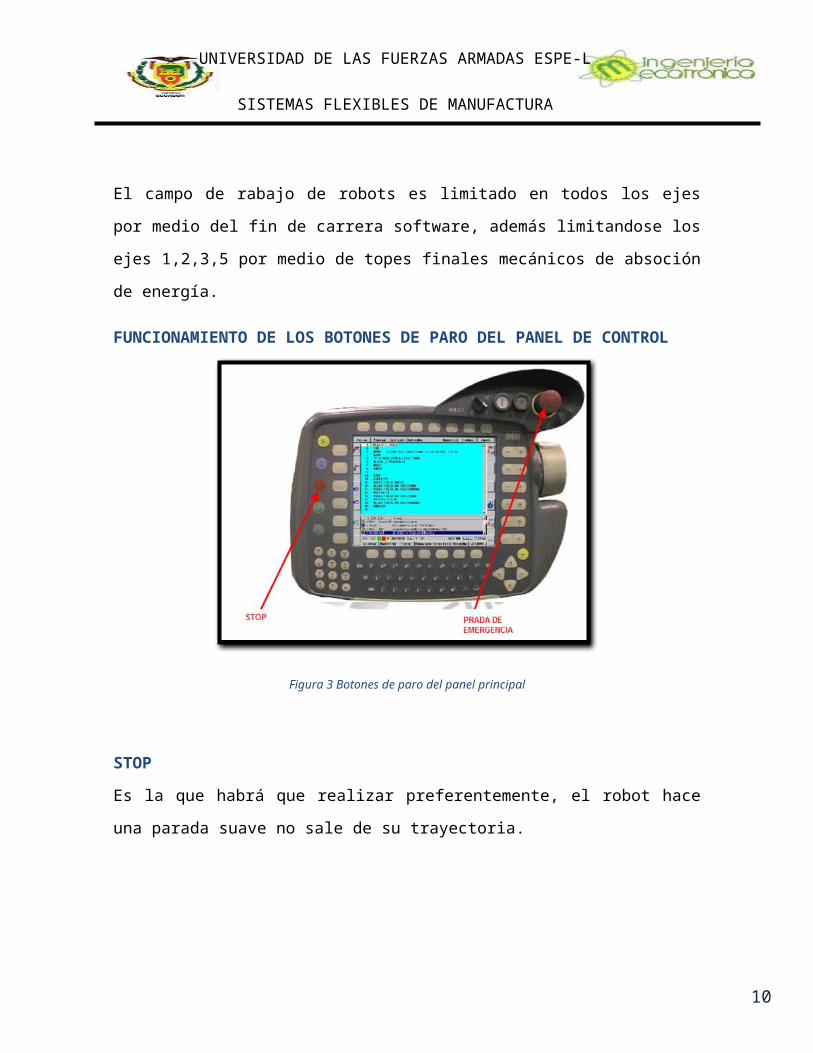
FUNCIONAMIENTO DE LOS BOTONES DE PARO DEL PANEL DE CONTROL
Figura 3 Botones de paro del panel principal
STOPEs la que habrá que realizar preferentemente, el robot hace una parada suave no
sale de su trayectoria.
PARADA DE EMERGENCIA Esta es un parada que habrá que hacer siempre que sea necesario pero o en
forma habitual el robot hace una parada brusca, en seco saliéndose de su
trayectoria.
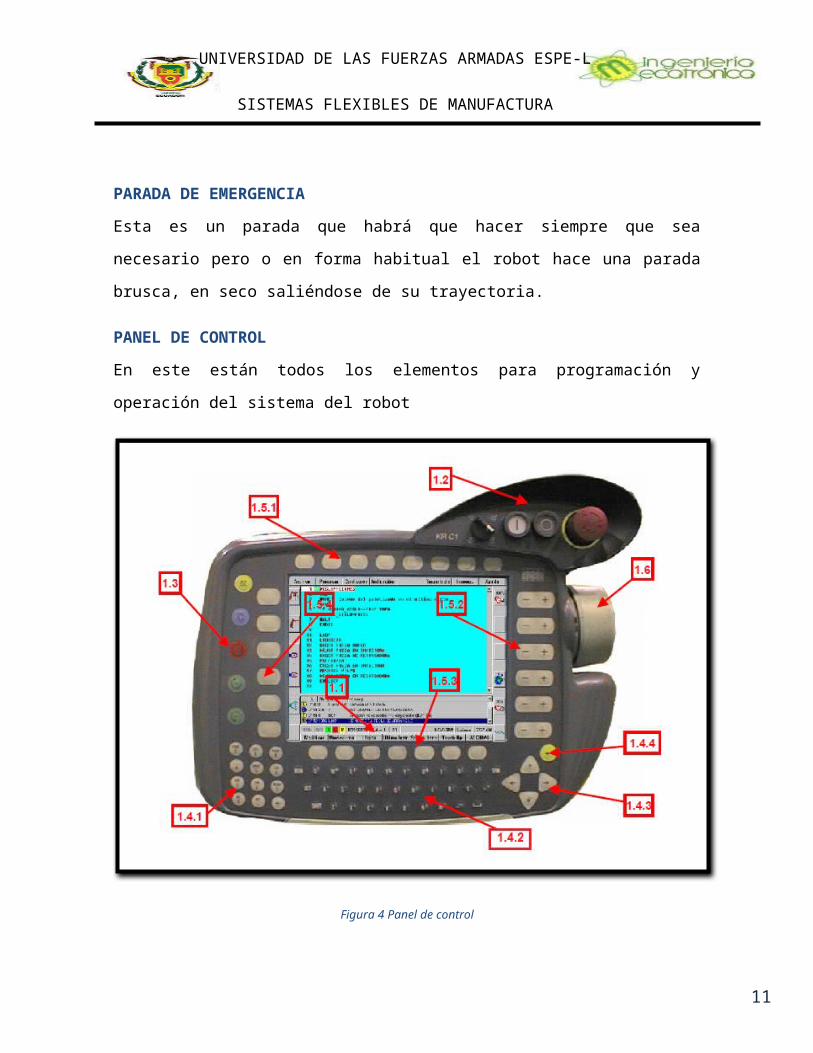
PANEL DE CONTROLEn este están todos los elementos para programación y operación del sistema del
robot
9
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Figura 4 Panel de control
1.1 Barra de estado.1.2 Accionamientos arriba-derecha.1.3 Teclas izquierda.1.4 Parte inferior.
1.4.1 Campo numérico1.4.2 Teclado1.4.3 Teclas de cursor1.4.4 Tecla de entrada
1.5 Teclas alrededor de la pantalla.1.5.1 Teclas de grupos de menús1.5.2 Teclas de funciones de estado derecha1.5.3 Softkeys1.5.4 Teclas de funciones de estado izquierda
1.6 Space mouse-ratón.
10
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
APLICACIONESLos Robots KUKA en cuanto a sus aplicaciones depende mucho de su:
Tamaño
Torque máximo
Aplicación
Rangos de Desplazamiento
LAS APLICACIONES INDUSTRIALES PARA ESTOS TIPOS DE ROBOT SON
INDUSTRIA DEL TRANSPORTE:En el transporte de pesos pesados
.En general se usa la carga y el
posicionamiento libre.
MANIPULACIÓN DE METALES:Los principales sectores del
trabajo son procesos de
manipulación como taladrar,
fresar, cortar o doblar y estampar.
Por supuesto los robots se aplican
en los procesos de fundición, el
montaje, la carga y descarga.
11
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
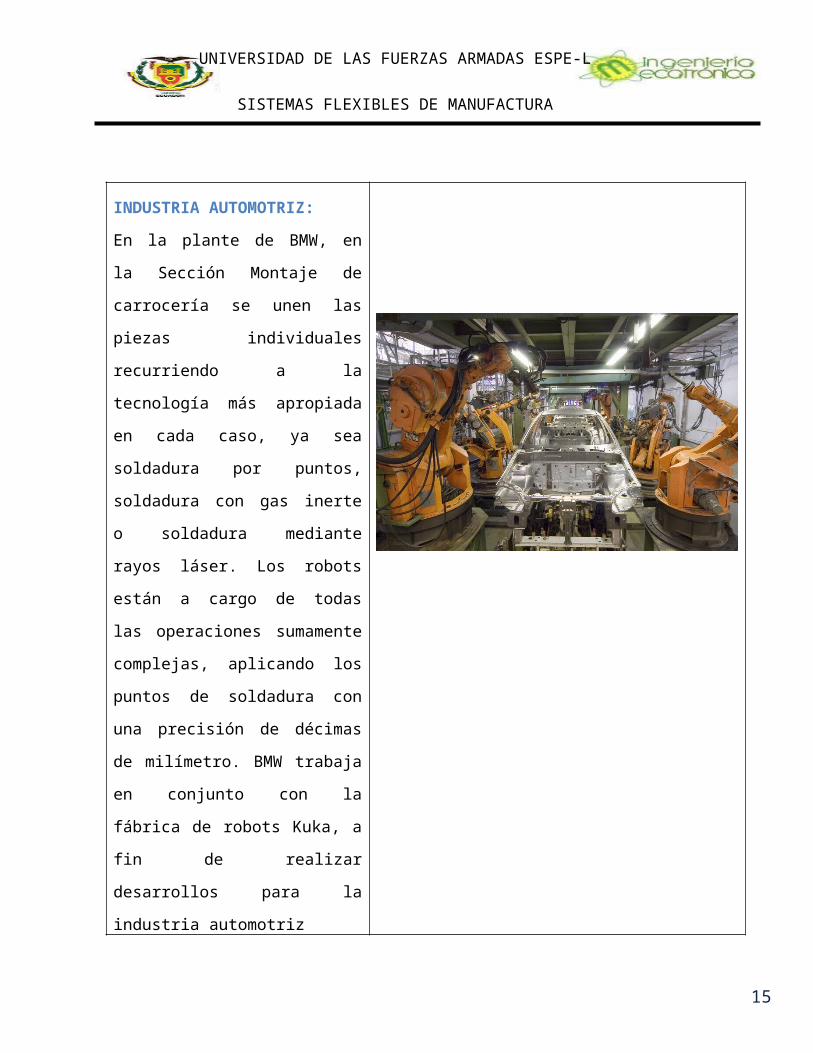
INDUSTRIA DE LA MADERA:Raspar, fresar, taladrar, serrar,
paletizar o clasificar son tareas
que están respaldados por robots
INDUSTRIA ALIMENTARIA: Los
robots KUKA también se utilizan
En la industria alimentaria. Ayudan
tanto a las personas como a las
maquinarias de forma fiable
cuando hay que gestionar tareas
como por ejemplo cargar y
descargar máquinas de embalaje,
cortar carne, paletizar y apilar y en
el control de calidad.
12
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
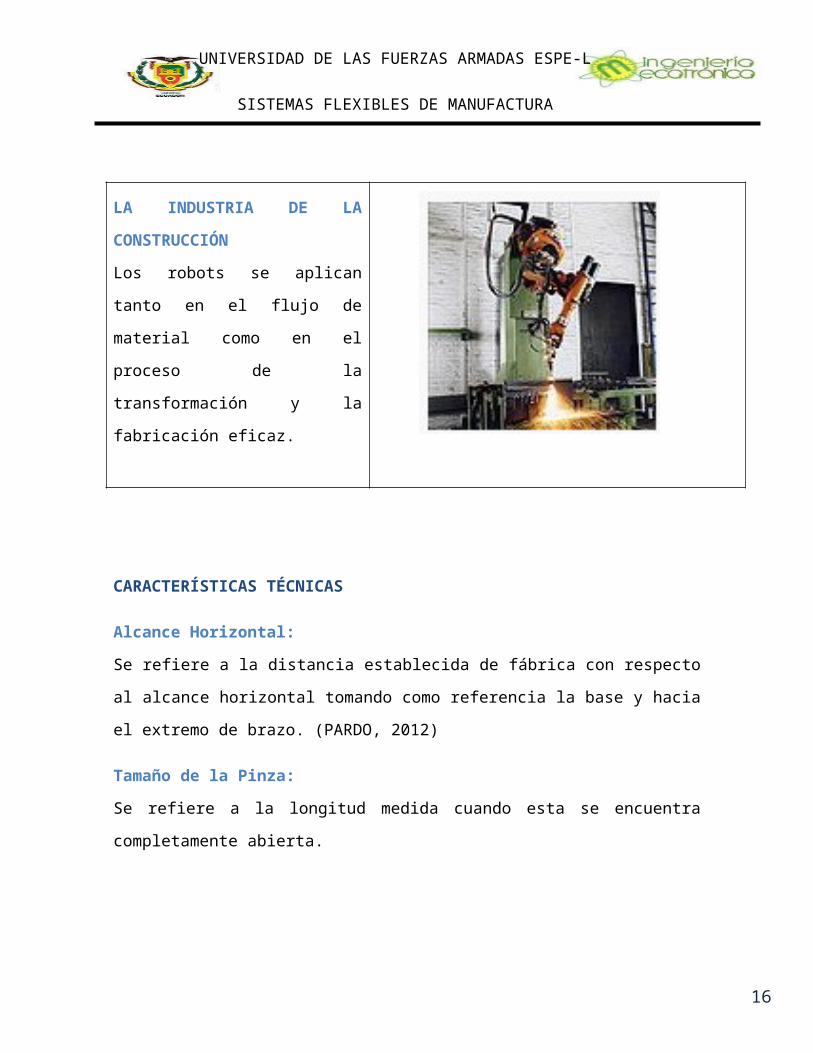
INDUSTRIA AUTOMOTRIZ:En la plante de BMW, en la
Sección Montaje de carrocería se
unen las piezas individuales
recurriendo a la tecnología más
apropiada en cada caso, ya sea
soldadura por puntos, soldadura
con gas inerte o soldadura
mediante rayos láser. Los robots
están a cargo de todas las
operaciones sumamente
complejas, aplicando los puntos de
soldadura con una precisión de
décimas de milímetro. BMW
trabaja en conjunto con la fábrica
de robots Kuka, a fin de realizar
desarrollos para la industria
automotriz
LA INDUSTRIA DE LA CONSTRUCCIÓNLos robots se aplican tanto en el
flujo de material como en el
proceso de la transformación y la
fabricación eficaz.
13
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
CARACTERÍSTICAS TÉCNICAS
Alcance Horizontal: Se refiere a la distancia establecida de fábrica con respecto al alcance horizontal
tomando como referencia la base y hacia el extremo de brazo. (PARDO, 2012)
Tamaño de la Pinza:Se refiere a la longitud medida cuando esta se encuentra completamente abierta.
Peso Manipulable: Es el peso aproximado máximo que puede manipular el bazo sin que este quede
bloqueado para determinar se utiliza una serie de pesos pequeños (KUKA
Robotics, 2015)
Área de Trabajo Barrida: El área dentro de la cual puede realizar un recorrido al trabajar esta puede ser de
tres tipos: Rectangular, Esférica, y cilíndrica. (PARDO, 2012)
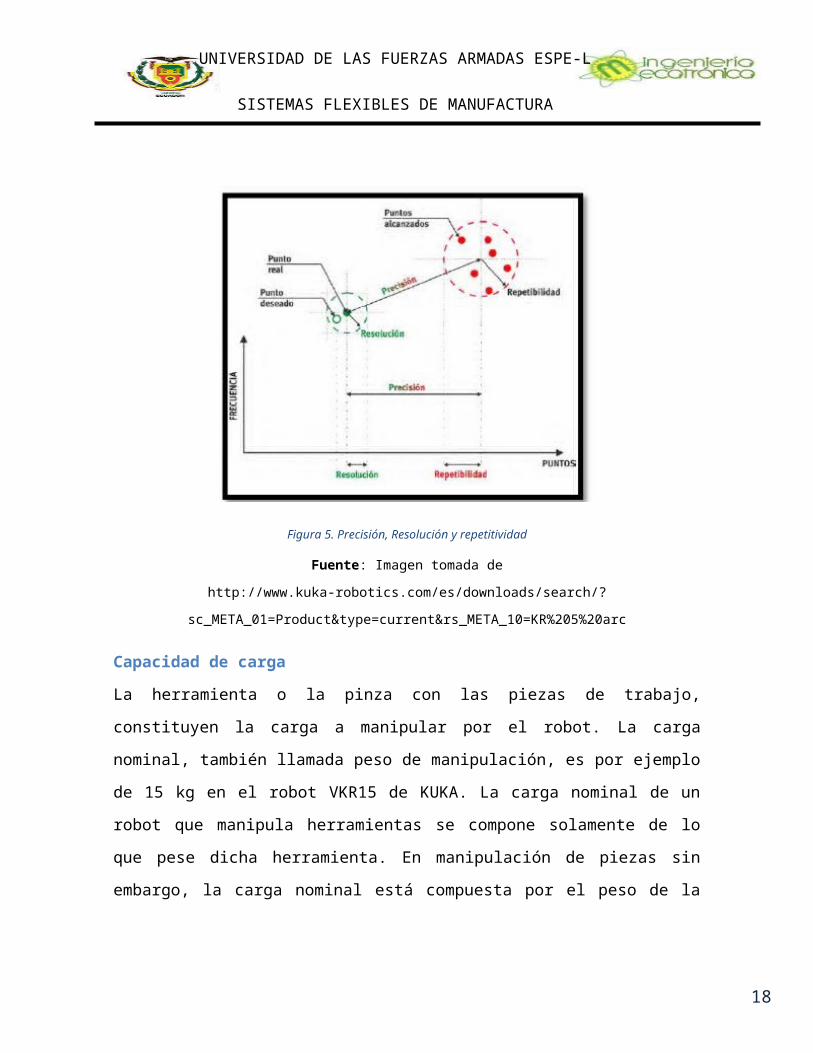
Resolución, precisión y repetitividad: La resolución se refiere el valor más pequeño que puede variar un dispositivo y en
este exclusivo caso sería el desplazamiento o movimiento mínimo permitido, la
precisión es la capacidad de obtener un resultado con el menor error posible y por
último la repetitividad se manifiesta como la capacidad de un dispositivo de dar
siempre el valor real de la variable medida. (http://www.info-ab.uclm.es, 2012)
14
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Figura 5. Precisión, Resolución y repetitividad
Fuente: Imagen tomada de http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
Capacidad de cargaLa herramienta o la pinza con las piezas de trabajo, constituyen la carga a
manipular por el robot. La carga nominal, también llamada peso de manipulación,
es por ejemplo de 15 kg en el robot VKR15 de KUKA. La carga nominal de un
robot que manipula herramientas se compone solamente de lo que pese dicha
herramienta. En manipulación de piezas sin embargo, la carga nominal está
compuesta por el peso de la pinza más el peso de la pieza. Se les pueden colocar
una carga adicional encima del antebrazo. (KUKA Robotics, 2015)
15
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Figura 6. Carga máxima de un KUKA
Fuente: Imagen tomada de http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
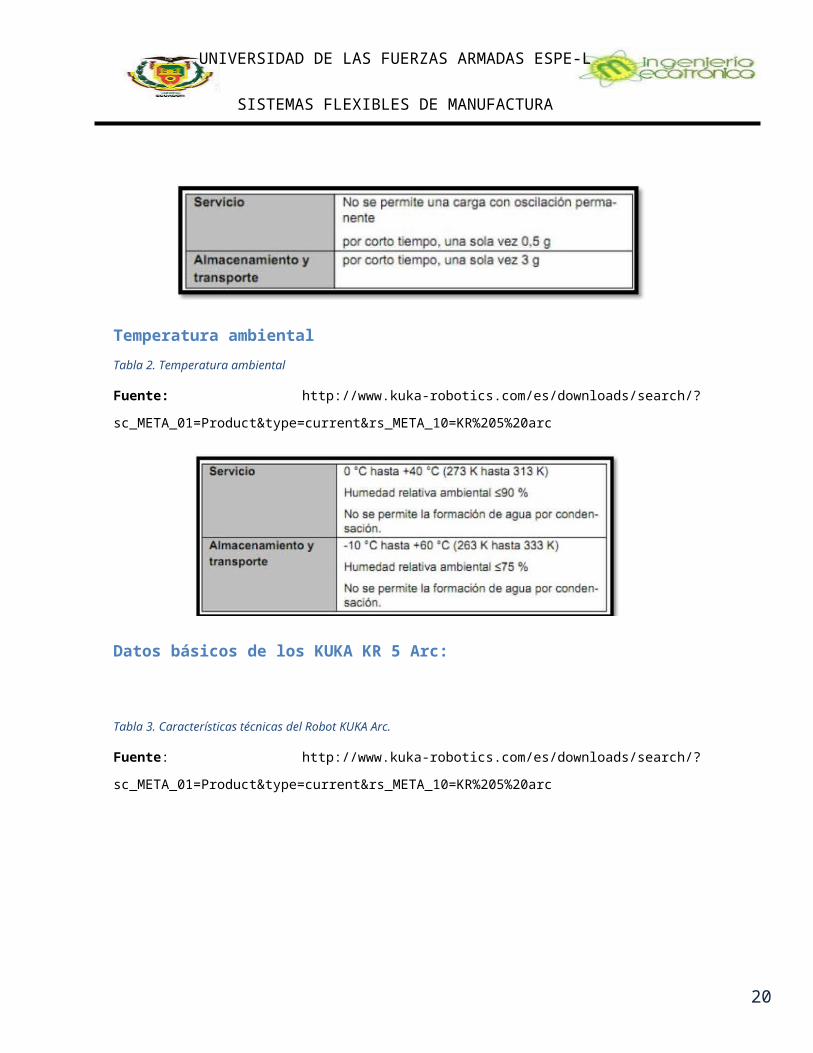
Cargas por OscilaciónTabla 1. Cargas Por oscilación
Fuente: http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
16
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Temperatura ambientalTabla 2. Temperatura ambiental
Fuente: http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
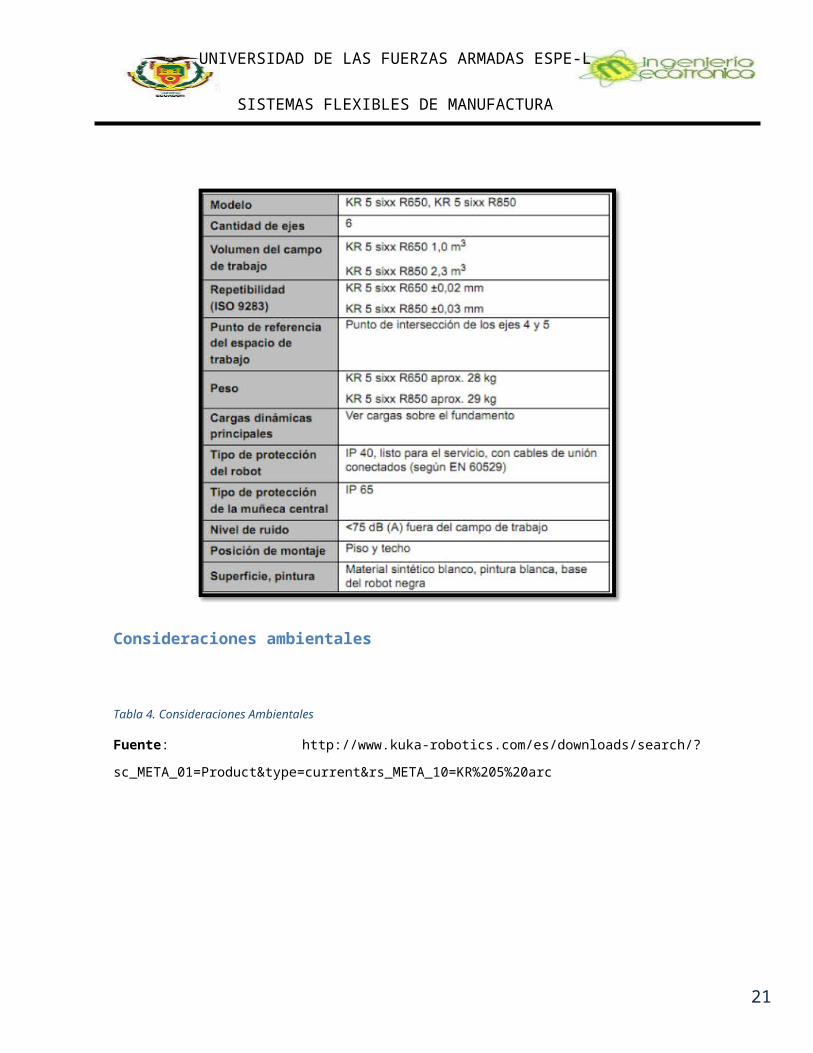
Datos básicos de los KUKA KR 5 Arc:
Tabla 3. Características técnicas del Robot KUKA Arc.
Fuente: http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
17
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Consideraciones ambientales
Tabla 4. Consideraciones Ambientales
Fuente: http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
18
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
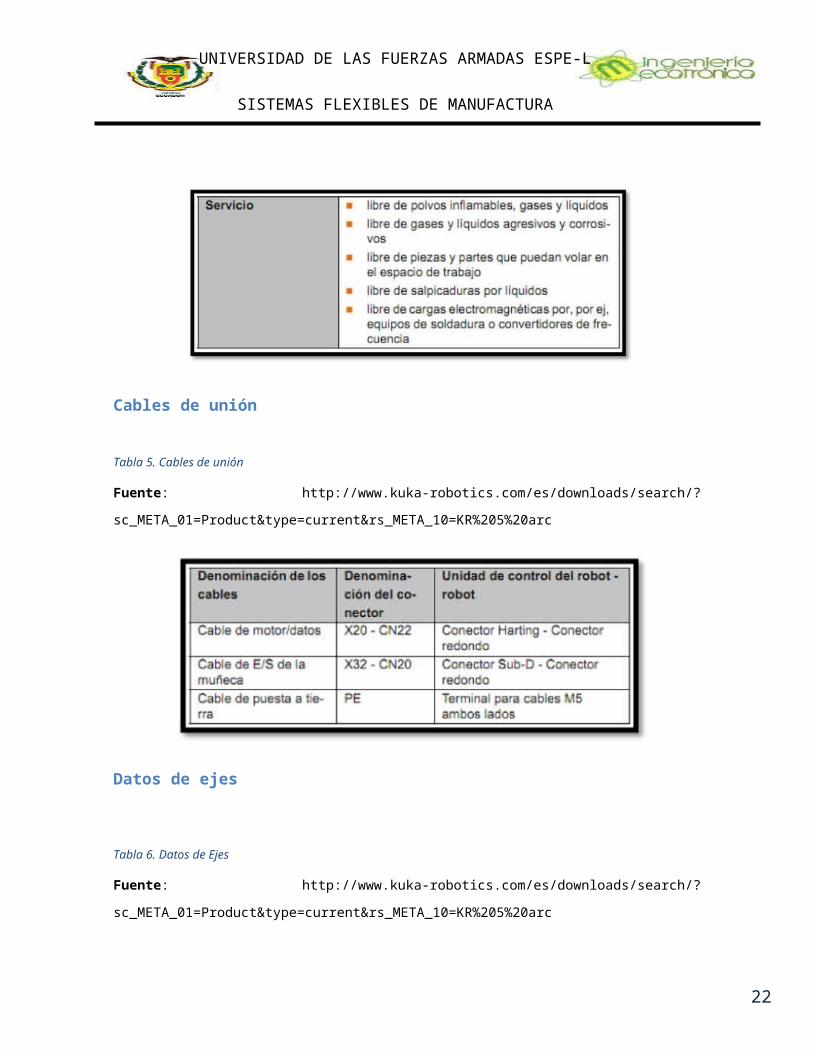
Cables de unión
Tabla 5. Cables de unión
Fuente: http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
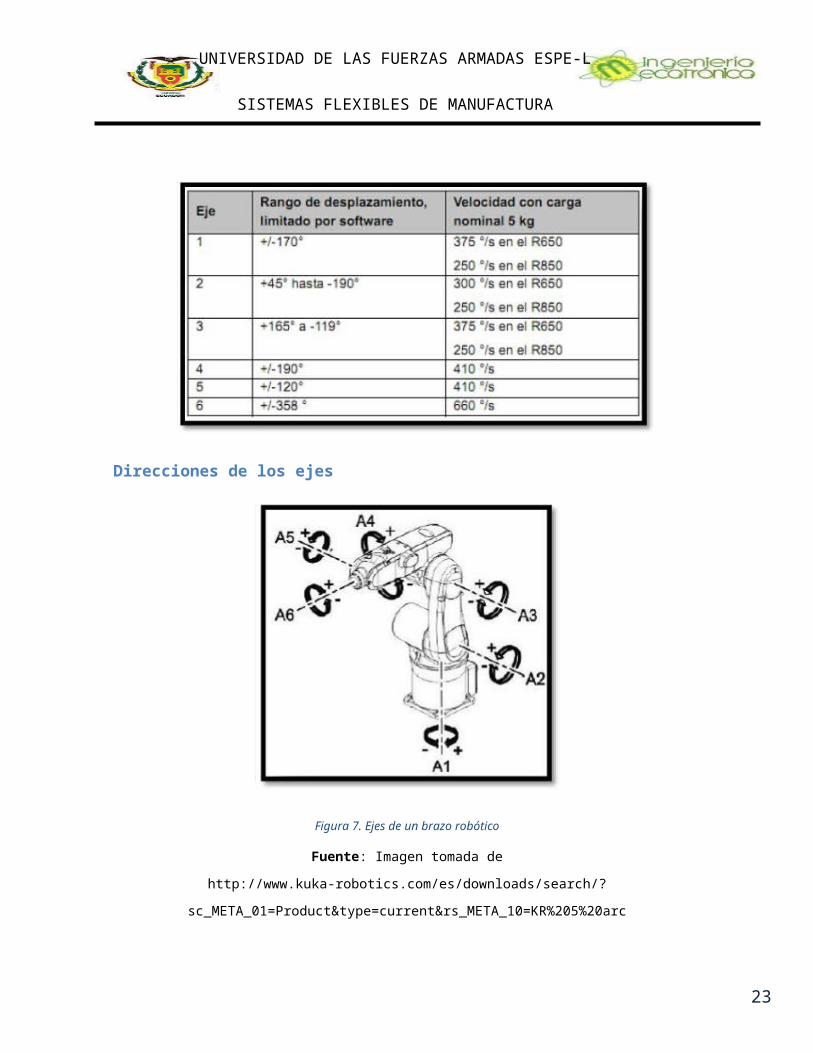
Datos de ejes
Tabla 6. Datos de Ejes
Fuente: http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc

19
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Direcciones de los ejes
Figura 7. Ejes de un brazo robótico
Fuente: Imagen tomada de http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
20
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
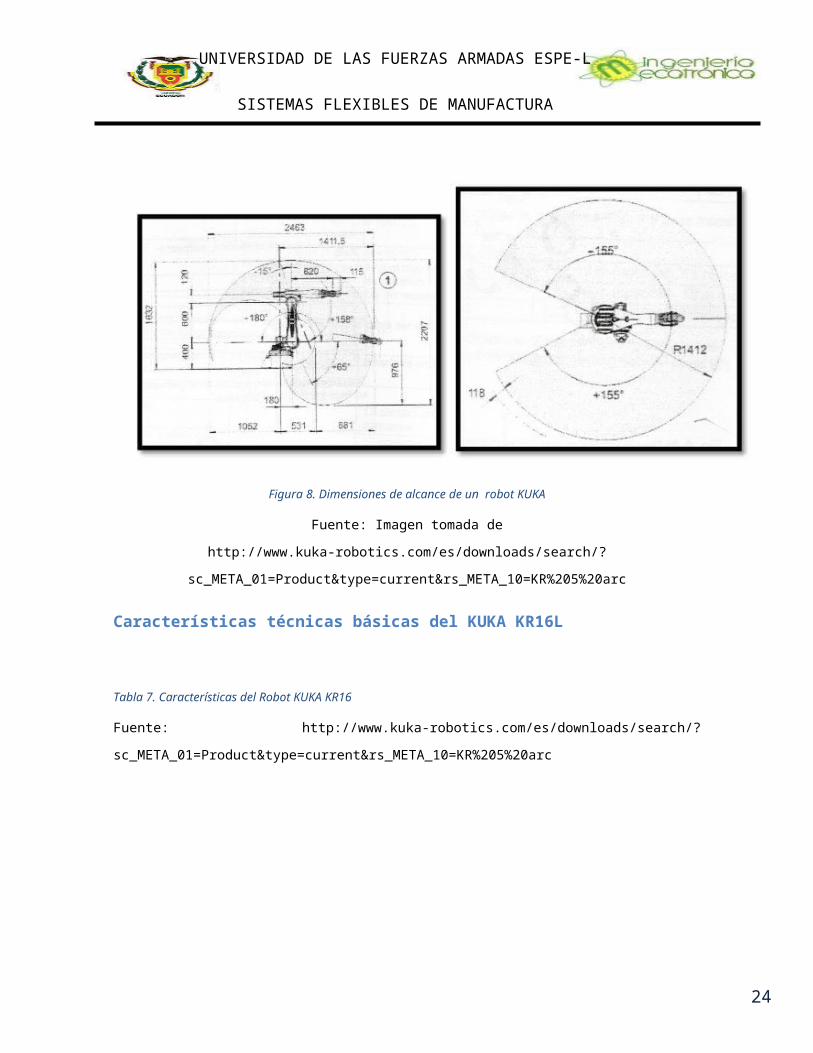
SISTEMAS FLEXIBLES DE MANUFACTURA
Figura 8. Dimensiones de alcance de un robot KUKA
Fuente: Imagen tomada de http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
Características técnicas básicas del KUKA KR16L
Tabla 7. Características del Robot KUKA KR16
Fuente: http://www.kuka-robotics.com/es/downloads/search/?
sc_META_01=Product&type=current&rs_META_10=KR%205%20arc
21
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Figura 9. Características básicas del robot KUKA KR16
ACCESORIOSTabla 8 Pinzas
MÓDUOS DE SUJECCIÓN NEUMÁTICAPinzas de dos dedos paralela
22
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
23
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
Pinzas de tres dedos Céntricas
CONCLUSIONES Cada robot KUKA tiene sus limitaciones en cuanto a cargas que puede
soportar, lo que nos lleva a considerar en cada aplicación que se realice
este tipo de datos, con lo cual se alarga la vida útil del robot.
Las características técnicas de los robots KUKA son de gran utilidad ya que
dependiendo de estas se les puede dar una aplicación u otra optimizando
así su uso y aprovechando todo el potencial que esta tecnología presenta.
La movilidad de los brazos robóticos KUKA está dada por 4 partes
principales brazo, muñeca central, brazo de oscilación y columna giratoria.
Cada una con su respectivo servomotor.
Los movimientos de cada una de las partes de los brazos robóticos KUKA
está limitado a un cierto rango de giro debido a que el giro completo (360
24
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA
grados) de esa parte podría suponer un riesgo tanto para los operarios
como para la integridad física del brazo.
Por las dimensiones del brazo robótico al desplazarse, este cubre una gran
superficie por lo que se debe mantener despejada esta superficie.
El Robot Kuka posee muchas ventajas ya que cuenta con un software
especial para cada aplicación esta puede ser paletizado, soldadura de arco,
inyectadora de plástico, etc.
Se identificó los distintos campos y zonas de seguridad y además las
principales seguridades brazo robótico KUKA.
Tener en cuenta características técnicas como la temperatura y e espacio
de trabajo es fundamental ya que de esto dependerá el entorno donde se
puede implementar este brazo robótico.
Los pesos máximos que puede soportar un brazo robótico son la
característica que se debe tener en cuenta para determinar la carga
permitida que puede movilizar el robot.
Bibliografíahttp://www.info-ab.uclm.es. (02 de Mayo de 2012). http://www.info-ab.uclm.es.
Recuperado el 06 de Julio de 2015, de
http://www.info-ab.uclm.es/labelec/Solar/Componentes/terminologia.htm
KUKA Robotics. (2015). http://www.kuka-robotics.com. Recuperado el 6 de Julio
de 2015, de
http://www.kuka-robotics.com/es/products/industrial_robots/low/kr5_arc/
start.htm
PARDO, A. (2012). Montaje y puesta en marcha de sistemas robóticos y
maquinaria industrial. Mexico: IC Editorial.

25
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
SISTEMAS FLEXIBLES DE MANUFACTURA