i. ps-2320 control de procesos ii - prof.usb.veprof.usb.ve/ysanchez/archivos/guiaps2320.pdf ·...
TRANSCRIPT

I. RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
I. RESPUESTA FRECUENCIAL La respuesta en frecuencia de un sistema se define como la respuesta del sistema, en estado
estacionario, ante una entrada sinusoidal. Sistemas lineales sometidos a este tipo de entrada
presentan una salida sinusoidal también pero con diferente amplitud y ángulo de fase.
Entre las ventajas que proporciona el análisis de un sistema a través de su respuesta en
frecuencia se encuentran la facilidad de reproducir señales de prueba que permiten una
identificación frecuencial, la existencia de criterios de estabilidad a lazo cerrado, basados
en la respuesta frecuencial del sistema a lazo abierto y finalmente la disposición de técnicas
de diseño para el control de sistemas cuando las especificaciones de la respuesta son de
carácter frecuencial. Además, cabe mencionar, que es posible establecer una relación entre
la respuesta frecuencial y la temporal.
Tal como se mencionó anteriormente, la respuesta frecuencial se obtiene al dar como
entrada a un sistema una función sinusoidal (x(t)), tal como se observa en la figura 1.1 y
obtener como salida (y(t)) también una función sinusoidal, tal como se observa en la figura
1.2
x(t) x(t) = X sen(ωt)
G(s) y(t)y(t) = Y sen(ωt+φ)
FIGURA 1.1 SISTEMA PERTURBADO CON UNA ENTRADA SINUSOIDAL
x(t) = X sen(ωt)
y(t) = Y sen(ωt + φ)
FIGURA 1.2 REPRESENTACIÓN DE LA ENTRADA Y LA SALIDA PARA EL SISTEMA ANTERIOR
Una vez alcanzado el estado estacionario se puede obtener, en forma analítica, la respuesta
frecuencial haciendo uso de la función de transferencia del sistema G(s), sustituyendo
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 1

I. RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
s = jω en la función de transferencia G(s) tal como se muestra a continuación:
G(jω) = M.e(jφ) = M ∠φ
donde,
M.....Relación de amplitudes de las sinusoidales de salida y entrada
φ .....Desfase entre las señales
de la misma forma G(jω) se expresa como un vector con modulo y ángulo
G(jω)= |G(jω) | e(jφ) ; ⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
=φ −
))j(GRe())j(GIm(tag 1
A partir de lo anterior y basándose en que G(jω) es una relación entre la entrada y la salida
se tiene,
( ) ( )( )ω
ω=ω
jxjyjG por lo que,
El modulo de G(jω) es:
)j(X)j(Y)j(G
ωω
=ω → relación entre amplitudes de las señales de salida y entrada
y la fase de G(jω) es:
)j(x)j(y)j(G
ωω
=ω
De allí que, si se conoce G(s) es posible obtener la respuesta frecuencial del sistema. 1.1.- OBTENCIÓN DE LA RESPUESTA EN FRECUENCIA A PARTIR DE LA FUNCIÓN DE TRANSFERENCIA
Una función de transferencia puede ser expresada como una relación de ceros y polos que
en forma general, puede ser escrita como:
∏
∏
=
=
+
+= n
1jj
m
1ii
)p(s
)z(sKG(s)
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 2

I. RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
donde, K ...... ganancia del sistema z ....... ceros del sistema p ...... polos del sistema m ...... el número de ceros n ....... el número de polos A manera de ejemplo, para una función de transferencia específica, su respuesta frecuencial
se puede obtener como sigue:
Para )ps(s)zs(K)s(G
++
= la respuesta frecuencial se obtiene sustituyendo s = jω
)pj(j)zj(K)j(G
+ωω+ω
=ω a partir de la cual se obtiene que el modulo de G(jω)
pj jzjK
)j(G+ωω
+ω=ω y la fase φ
( ) ( )pjjzjpz)j(G +ω+ω−+ω=−=ω ∑
El módulo y la fase se evalúan para diferentes ω obteniéndose así la respuesta frecuencial
del sistema.
La representación de la respuesta frecuencial puede hacerse de diferentes formas, entre las
cuales se pueden nombrar las siguientes: Los Diagramas de Bode y los Diagramas Polares.
A continuación se describirán cada una de estas representaciones
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 3

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
II. Diagramas de Bode
El diagrama de bode se utiliza para representar la respuesta frecuencial de un sistema
utilizando dos gráficos. El primero, es la representación del logaritmo de la magnitud
versus la frecuencia (ω) y el segundo representa el ángulo de fase (φ) versus la frecuencia
(ω).
La magnitud logarítmica de G(jω) se representa como una amplitud logarítmica y se calcula
como el 20 log |G(jω)|, siendo la unidad de dicha amplitud los decibeles (db).
La principal ventaja de realizar un diagrama logarítmico es que el carácter multiplicatorio
de los módulos de la función de transferencia se convierte en aditivo. Además, la
construcción del diagrama puede realizarse a través de aproximaciones asintóticas, las
cuales se explicaran a continuación. Si se considera el siguiente ejemplo, se puede observar
el carácter aditivo de la magnitud logarítmica.
Para )p).(sps.(s
)z).(sz(sG(s)21
21
++++
= la respuesta frecuencial se obtiene sustituyendo s = jω
)pj( )pj( j)zj( )zj()j(G21
21
+ω+ωω+ω+ω
=ω
donde el módulo |pj| |pj| |j|
|zj| |zj|)j(G
21
21
+ω+ωω+ω+ω
=ω se representará como una amplitud
logarítmica igual a: 20 log |G(jω)| = 20 log |(jω+z1)| + 20 log |(jω+z2)| - 20 log |jω| -20 log |(jω+p1)| -20 log |(jω+p2)|
y la fase:
φ = φ1 + φ2 - φ3 - φ4 - φ5
A partir de allí, se puede observar que si se conoce el Diagrama de Bode de los diferentes
factores que representan una función de transferencia será posible obtener el diagrama de
Bode de una función compuesta de una forma muy sencilla. Para ello se estudiarán a
continuación los diagramas de bode para los diferentes factores que conforman una función
de transferencia, los cuales son:
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 4

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
• Ganancia K
• Factores integral o derivativo (jω)+ 1
• Factores de primer orden (1+τjω)+ 1
• Factores cuadráticos [ 1+ 2ξ(jω/ωn)+ (jω/ωn)2]+ 1
2.1. GANANCIA K
G(s) = K
G(jω) = K
de allí que la amplitud logarítmica de G(jω) sea 20 log K = constante.
Si K > 1 → 20.log K es positivo
Si K < 1 → 20.log K es negativo
La fase se calcula como: 0ReImtag 1 =⎟
⎠⎞
⎜⎝⎛− para todo ω.
En la figura 2.1 se muestra la representación del diagrama de bode para este factor, la cual
se realiza en escala semilogarítmica.
ω
20 log K 20 log⏐G(jω)⏐
ω
φ
FIGURA 2.1. DIAGRAMA DE BODE PARA UNA GANANCIA K
Como se puede observar, la ganancia tiene el efecto de subir o bajar la gráfica de ganancia
logarítmica, sin afectar el ángulo de fase.
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 5

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
2.2. FACTORES INTEGRAL O DERIVATIVO G(s) = (s)+ 1 Se desarrollará el Diagrama de Bode para el caso de un polo y luego se extenderá la
aplicación a un cero:
( )s1sG = → ( )
ω−=
ω=ω
1jj1jG
A partir de allí, la amplitud logarítmica será:
( ) ω−=ω−=ω
=ω log20log201log201log20)j(Glog20
Al escoger una escala logarítmica para ω se tiene que la gráfica del módulo se convierte en
una recta cuya pendiente puede ser calculada de la siguiente forma:
Para las frecuencias ω1 y ω2, entre las cuales existe una década, se evalúa la amplitud
logarítmica obteniéndose lo siguiente:
102
1ω
=ω
20 log |G(jω1)| = -20 log ω1
20 log |G(jω2)| = -20 log ω2
Realizando la diferencia,
20 log |G(ω1)| - 20 log |G(ω2)| = 20 log ω1 - 20 log ω2 = 20 log (ω1 /ω2)
= 20 log (ω1 /10 ω1) = 20 log (1/10) = 20 log 1 – 20 log 10 = - 20 db
Esto implica que la gráfica cae 20 db por década, tal como se observa en la figura 2.2.
Además, para ω = 1 el valor de la ganancia logarítmica es cero.
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 6

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
ω1
20 db
ω2 (10⋅ω1)
FIGURA 2.2 CAÍDA DE LA AMPLITUD LOGARÍTMICA
Finalmente, el ángulo de fase se calcula a partir de la parte real (Re) e imaginaria (Im) del
vector, de allí que:
φ = tag –1( Im /Re )
La parte imaginaria Im = -1/ω para todo ω y la parte real Re = 0, por lo que la fase será
–90º para todo ω.
En la figura 2.3 se puede observar el diagrama de Bode para el caso de un polo y un cero en
el origen.
POLO
--20
0
20
40
8090
100
-40 -20
0
20
10-1 -90
30
ω = 1; 20 log(1) =
100 101 102102101 10010-1
CERO FIGURA 2.3 DIAGRAMA DE BODE PARA UN POLO Y UN CERO EN EL ORIGEN
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 7

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
Cabe destacar que, si se tienen polos múltiples G(s)= s + n, por lo que la ganancia
logarítmica y la fase serán:
( ) ω±=ω ± logn 20jlog20 n φ = + n (90°)
De allí que se tendrá una gráfica de ganancia logarítmica cuya pendiente será
± n (20 db/ década) y una gráfica de fase cuyo valor será ( ± n 90º )
2.3. FACTORES DE PRIMER ORDEN G(s) = (τs+1) + 1 Al igual que en el caso anterior, primero se desarrollará el Diagrama de Bode para el polo y
luego para el cero.
1sτ1)s(G+
=
( )( )( )
( ))1(
jτ1jτ1jτ1
jτ11)j(G 22ωτ+
ω−=
ω−ω−
ω+=ω
Separando en parte Real y parte Imaginaria se tiene:
( ) jτ1 τ
τ11jG 2222 ω+
ω−
ω+=ω
A partir de allí el módulo de G(jω) será:
( )( ) 22222
22
τ1
1τ1τ1jG
ω+=
ω+
ω+=ω
y la amplitud logarítmica será:
( ) 22τ1log 20 - |jG|log 20 ω+=ω
Para graficar se utilizarán las siguientes aproximaciones:
Para ω << 1/ τ → 20 log |G(jω)| = - 20 log(1) = 0 db
Para ω >> 1/ τ → 20 log |G(jω)| = - 20 log(τω) → pendiente – 20 db/ década
Para ω = 1/τ → 20 log |G(jω)| = -20 log τω = - 3 db.
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 8

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
Para los dos extremos, se tiene lo que se conoce como aproximación asintótica del
diagrama de amplitud logarítmica, la cual se observa en la figura 2.4. La frecuencia en la
cual se encuentran las dos asíntotas se conoce como frecuencia de corte (ω = 1/ τ) o
frecuencia de transición de ganancias.
El ángulo de fase se calcula como φ = arctg (-τω), el cual también se gráfica utilizando las
siguientes aproximaciones:
Para ω << 1/ τ → Re→ +1 ; Im→ -0 → φ = 0°
Para ω = 1/ τ → φ = - 45°
Para ω >>1/ τ → Re = (0+) ; Im = 0- → φ = -90º (La parte Im tiende a cero más lento que la parte Re ).
A partir de lo anterior el Diagrama de Bode para este factor se muestra a continuación:
FIGURA 2.4 DIAGRAMA DE BODE PARA UN POLO EN EL EJE REAL
En caso de que sea un cero las gráficas son simétricas respecto al eje de frecuencias.
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 9

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
2.4. FACTORES CUADRÁTICOS 1
n2n
2
1s2s)s(G±
⎟⎟⎠
⎞⎜⎜⎝
⎛+
ωξ
+ω
=
Para el caso de un polo conjugado se tiene:
1
n2n
2
1s2s)s(G−
⎟⎟⎠
⎞⎜⎜⎝
⎛+
ωξ
+ω
= , el cual al multiplicarse por el conjugado queda,
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
ωω
ξ−⎥⎥⎦
⎤
⎢⎢⎣
⎡
ω
ω−
ωω
ξ−⎥⎥⎦
⎤
⎢⎢⎣
⎡
ω
ω−
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
ω
ω−ω
ωξ
+
=ω
j21
j21
j21
1)j(G
n2n
2n
2n
2
2n
2
n
separando las partes Real e Imaginaria se tiene:
2
n
2
2n
2
n2n
2
21
j21)j(G
⎥⎦
⎤⎢⎣
⎡ωω
ξ+⎥⎦
⎤⎢⎣
⎡ωω
−
ωω
ξ−⎥⎦
⎤⎢⎣
⎡ωω
−
=ω a partir de allí el módulo se calcula como:
( )2
n
2
2n
222
n
2
2n
2
2
n
2
2n
2
21
1
21
21jG
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
ξ+⎥⎦
⎤⎢⎣
⎡ωω
−
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ωω
ξ+⎥⎦
⎤⎢⎣
⎡ωω
−
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
ξ+⎥⎦
⎤⎢⎣
⎡ωω
−
=ω
quedando la amplitud logarítmica como:
2
12
n
22
n
21log 20 |G|log 20⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
ξ+⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
−−=
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 10

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
ξ+⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
−−=2
n
22
n
21log 10 |G|ogl 20
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 11
de la misma forma que en el caso anterior, se aproxima en los extremos obteniéndose lo
siguiente:
Para ω << ωn → 20 log |G(jω)| → -20 log 1 = 0 db
Para ω >> ωn → 20 log |G(jω)| → -40 log ω/ωn (recta de pendiente - 40 db/dc )
Para ω = ωn → 20 log |G(jω)| = -20 log 2ζ
Las asíntotas se cruzan en ω = ωn, tienen un error respecto a la curva real que depende del
valor de ξ, el cual aumenta a medida que ξ disminuye. El ángulo de fase se calcula como:
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛ω
ω−
ω
ωξ
−=φ −
2
21
n1
n2
tg aproximando igualmente en los extremos se tiene que para:
Para ω << ωn La parte Re → 1
La parte Im → 0 φ → 0°
Para ω >> ωn Re → 4
n
2
n
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
− → -0; Im → 4
n
n
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
− → -0 por ello φ → -180 º
(más rápido)
Para ω = ωn Re → 0 ; Im → número negativo finito φ = - 90°

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
A partir de lo anterior se puede graficar el diagrama de bode para la variación de ξ, tal
como se muestra a continuación:
z FIGURA 2.5 DIAGRAMA DE BODE PARA UN POLO CONJUGADO
El pico que se observa en el Diagrama de Bode anterior se conoce como Pico de
Resonancia (Mr) y ocurre a una frecuencia conocida como Frecuencia de Resonancia
(ωr), ambos valores pueden ser calculados utilizando las siguientes expresiones:
Mr = |G(jωr)| =212
1ξ−ξ
2nr 21 ξ−ω=ω
Cabe mencionar que, para ξ > 0,707, la gráfica de amplitud logarítmica no presenta pico.
En ese caso, la única corrección posible al diagrama asintótico, se realiza calculando el
valor que cae el diagrama real en ωn . Para que un sistema sea considerado como aceptable
en su respuesta el pico de resonancia debe ser menor que 1,5.
Finalmente, el cálculo exacto de la fase puede hacerse a partir de la siguiente expresión:
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 12

II. DIAGRAMAS DE BODE PS-2320 CONTROL DE PROCESOS II
φ(ωr) = -90° + sen-1
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
− 21 ξξ
2.5. RETARDO DE TRANSPORTE
El Retardo de transporte se puede representar a través de la siguiente función de
transferencia,
G(s) = e –Ts T…. tiempo de retardo
Sustituyendo s = jω se tiene que,
G(jω) = e -jωT
|G(jω)| = | cos(ωT) – j sen(ωT) | = 1 → 20.log |G| = 0 db
)j(G ω = - ωT (radianes)
)j(G ω = - 57,3 ωT (grados)
A partir de allí el diagrama de bode para dicho factor se muestra en la siguiente figura:
20 log |G(jw) |
φ
w
w
-57,3 wT
FIGURA 2.6 DIAGRAMA DE BODE PARA UN SISTEMA CON RETARDO
Una vez conocidos los diagramas de Bode para cada uno de los factores, se puede obtener
el diagrama de bode para un sistema conformado por varios factores
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 13
III. OBTENCIÓN DE UN DIAGRAMA DE BODE A PERTIR DE SU FUNCIÓN DE TRANSFERENCIA
ONTROL DE ROCESOS PS-2320 C P II
III. OBTENCIÓN DE UN DIAGRAMA DE BODE A PARTIR DE SU FUNCIÓN DE TRANSFERENCIA Para realizar el diagrama de bode se deben seguir los siguientes pasos:
• Rescriba la función de transferencia como un producto de los factores básicos
analizados anteriormente.
• Identifique las frecuencias de corte de cada uno de los factores
• Dibuje las curvas asintóticas
Ejemplo 3.1
( )( )( )16s2s2ss
1s8)s(G 2 ++++
=
Reordenando
( )
1616
16s2s22
2ss
1s8)s(G2
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎠⎞
⎜⎝⎛ +
+=
( )
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟
⎠⎞
⎜⎝⎛ +
+=
18s
16s.1
2s.s
1s.41)s(G2
A partir de allí se identifican los siguientes factores:
- Ganancia = 1/4
- Polo origen
- Cero eje real (s +1) → ω1 = 1
- Polo eje real ( 1/2s + 1) → ω2 = 2
- Polo de 2do Orden ( s2/16 +s/8 +1) → ωn2 = 16 → ωn = 4
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 14

III. OBTENCIÓN DE UN DIAGRAMA DE BODE A PERTIR DE SU FUNCIÓN DE TRANSFERENCIA
ONTROL DE ROCESOS PS-2320 C P II
2ξ / ωn = 1/8 → 2ξ /4 = 1/8
ξ = 1/4
Cada uno de dichos factores se puede observar en el siguiente diagrama de bode, el cual
muestra el diagrama asintótico y el real.
FIGURA 3.1 DIAGRAMA DE BODE
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 15

IV. IDENTIFICACIÓN DEL SISTEMA A PARTIR DE SUS DIAGRAMA DE BODE PS-2320 CONTROL DE PROCESOS II
IV. IDENTIFICACIÓN DEL SISTEMA A PARTIR DE SU DIAGRAMA DE BODE La identificación se realiza reconociendo en el diagrama de bode del sistema cada uno de
los factores que lo conforman. A continuación se mostrarán dos ejemplos que muestran el
procedimiento a seguir.
EJEMPLO 4.1
Para un sistema cuya respuesta frecuencial es la que se muestra a continuación, se solicita
que identifique la función de transferencia que lo representa.
FIGURA 4.1 DIAGRAMA DE BODE
A partir de dicho diagrama se pueden realizar las siguientes observaciones:
1. A baja frecuencia la pendiente es de –20 db/dc lo que implica un Polo en el Origen,
pudiendo confirmarse dicha suposición pues la fase φ para baja frecuencia comienza en
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 16

IV. IDENTIFICACIÓN DEL SISTEMA A PARTIR DE SUS DIAGRAMA DE BODE PS-2320 CONTROL DE PROCESOS II
º90− . Adicionalmente se observa que existe una ganancia menor que uno pues para
ω = 0,1 la amplitud logarítmica es aproximadamente 8 db, cuando debería ser de 20 db si la
ganancia fuese uno. De allí se calcula 20 log K = - 12 db → K = 0,2512
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 17
2. La pendiente cae a 0 db/dc lo que indica la aparición de un cero en el eje real, se
dibuja la recta de – 20 db/dc a baja frecuencia y en donde la difrencia entre la asíntota sea
aproximadamente 3 db (aproximadamente en ω = 1) se dibuja la recta de o db/dc. De allí
que el cero será (s+1)
3. Para frecuencias altas, la pendiente tiende a - 60 db/dc y la fase tiende a – 270º lo que
implica la aparición de tres polos. Un polo en el eje real y un par de polos conjugados que
se reconocen debido al pico de resonancia el cual ocurre a una frecuencia ωr ≈ 3,5.
4. Para identificar las frecuencias de corte se sigue el siguiente procedimiento:
- Se traza la pendiente de – 60 db/dc que a alta frecuencia se pega a la recta real.
- Se traslada una pendiente de – 20 db/dc hasta que corte la recta de (- 60db/dc) a una
frecuencia ligeramente mayor ωr, de esta forma se propone estima ωn = 4
-
Como 2
rn
21 ξ−
ω=ω → ( )
22
45,3 21 ⎟
⎠⎞
⎜⎝⎛=ξ− → ξ = 0,3423
Para dicho ξ la amplitud logarítmica del pico de resonancia será:
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ξ−ξ=
21 21log 20Mrlog 20 = 3,8 db
el cual coincide aproximadamente con el observado.
5. Para identificar el otro polo se observa en que punto la recta de – 20 db/dc, mencionada
en el punto anterior, corta a la recta de pendiente 0 db/dc, el cual resulta ser ω2 = 2.
Por lo anterior se concluye que la función de transferencia del sistema sería:

IV. IDENTIFICACIÓN DEL SISTEMA A PARTIR DE SUS DIAGRAMA DE BODE PS-2320 CONTROL DE PROCESOS II
( )
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+++
+=
1s81
16s2ss
1sK)s(G2
EJEMPLO 4.2:
Para un sistema cuya respuesta frecuencial es la que se muestra a continuación, se solicita
que identifique la función de transferencia que lo representa.
-150
-100
-50
0
50
10 -2 10 -1 100 101 10 2 -300 -250 -200 -150 -100 -50
FIGURA 2.4 DIAGRAMA DE BODE
Identificación
1. Pendiente –20 db/dc a baja frecuencia implica un polo en el origen y se verifica con la
fase que comienza en -90°
2. En ω = 0,1 20 log |G| = 20 db lo cual implica que la ganancia es igual a uno.
3. A alta frecuencia la pendiente tiende a – 60db/dc y la fasa a – 270, lo cual confirma la
aparición de dos polos más. Debido a que no hay presencia de ningún pico se podría pensar
en un polo doble cuya frecuencia de transición fuese el cruce de la recta de – 20db/dc con la
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 18

IV. IDENTIFICACIÓN DEL SISTEMA A PARTIR DE SUS DIAGRAMA DE BODE PS-2320 CONTROL DE PROCESOS II
recta de – 60db/dc, aproximadamente ω = 3 pero al observar la diferencia entre el diagrama
asintótico supuesto y real, la caída en amplitud logarítmica en ω = 3 sería de
aproximadamente 10 db, lo cual discrepa de lo supuesto, pues si se tienen polos dobles la
diferencia en la frecuencia de cruce debería ser de 6 db.
Por ello se suponen que existen dos polos reales y diferentes. Se añade una recta de – 40 db/dc y donde cruce con a las otras frecuencias se obtendrán los polos.
4. Se supone que existen dos polos reales y diferentes. Se añade una recta de – 40 db/dc
que pase por el punto donde la diferencia entre la curva real y la recta de – 20 db/dc a baja
frecuencia sea de – 3db. Donde dicha recta cruce con las otras aproximaciones asintótias,
se obtendrán los polos.
polo 1 → ωc1 ~ 1 ..... (s+1)
polo 2 → ωc2 ~ 9 ..... (1/9s+1)
A partir de lo anterior se identifica la función de transferencia como:
( )( )1s911ss1)s(G
++=
PROF. JENNY MONTBRUN DI FILIPPO PROF YAMILET SANCHEZ MONTERO 19

V. RELACIÓN ENTRE LA CURVA DE AMPLITUD LOGARÍTMICA, TIPO Y ERROR PS-2320 CONTROL DE PROCESOS II
V. RELACIÓN ENTRE LA CURVA DE AMPLITUD LOGARÍTMICA , EL TIPO DE
SISTEMA Y EL ERROR A LAZO CERRADO Considerando un sistema de control de retroalimentación simple, es posible utilizar la
respuesta frecuencial a lazo abierto para conocer el error a lazo cerrado.
En forma muy general la función de transferencia de lazo directo G(s)H(s) puede ser escrita
como sigue:
G(s)H(s) = ( )( ) ( )( ) ( )1sT1sTs
1sT1sT1sTK
nan
m21
+++++
K
K
Es importante recordar que el error de un sistema depende del tipo del sistema y de la
entrada a la cual se vea sometido. A partir de allí, se puede calcular el error del sistema en
función de los coeficientes de error estático (Kp, Kv y Ka). Donde los valores de Kp, Kv y
Ka son calculadas a partir de las siguientes expresiones:
Kp = lims→0 G(s)H(s)
Kv = lims→0 s G(s)H(s)
Ka = lims→0 s2 G(s)H(s)
En base a lo anterior, se analizará el uso de la respuesta frecuencial del lazo directo para
conocer el error del sistema a lazo cerrado.
5.1 SISTEMAS TIPO CERO
Para un sistema tipo 0 cuando la frecuencia tiende a cero, G(jω)H(jω) tiende a Kp. Por lo
tanto, a partir de la gráfica de ganancia logarítmica se puede obtener Kp, pues a baja
frecuencia la amplitud logarítmica de 20 log |G(jω)H(jω)| = 20 log Kp. En la figura 5.1 se
puede apreciar lo enunciado anteriormente.
20 lg Kp20 lg |G(jw)H(jw)|
Fig. 5.1 Diagrama de amplitud logarítmica para un sistema tipo cero
Prof. Jenny Montbrun Di Filippo 20 Prof. Yamilet Sánchez Montero

V. RELACIÓN ENTRE LA CURVA DE AMPLITUD LOGARÍTMICA, TIPO Y ERROR PS-2320 CONTROL DE PROCESOS II
5.2 SISTEMAS TIPO UNO
Para un sistema de tipo 1 para ω << 1 , |G(jω)H(jω)| se puede aproximar a
ω=ωω
jKv)j(H)j(G , lo cual se representa como una recta de pendiente -20 db/dec a baja
frecuencia, tal como se observa en la figura 5.2. Si además, se evalúa esta aproximación
para ω = 1 se tiene:
Kvlog20jKvlog20
1
=ω
=ω
en forma gráfica esto se logra extendiendo la recta de – 20db/dec y leyendo en la gráfica el
valor de la ganancia logarítmica para ω = 1, se obtiene Kv , además 1jKv
1
=ω ω=ω
ω1 = Kv
Fig. 5.2 Diagrama de amplitud logarítmica para un sistema tipo uno
5.3 SISTEMAS TIPO DOS
Para sistemas de tipo 2 se tiene que, para ω <<1 el módulo de |G(jω)H(jω)| tiende a
( ) ( )( )2jKajHjGω
→ωω
Utilizando un procedimiento similar al anterior, se evalúa
Prof. Jenny Montbrun Di Filippo 21 Prof. Yamilet Sánchez Montero

V. RELACIÓN ENTRE LA CURVA DE AMPLITUD LOGARÍTMICA, TIPO Y ERROR PS-2320 CONTROL DE PROCESOS II
( )Kalog20
jKalog20
12 =
ω =ω
Prof. Jenny Montbrun Di Filippo 22 Prof. Yamilet Sánchez Montero
y además, la frecuencia para la cual dicha corta 0 db (ω 0db = ωa ) puede ser utilizada para
calcular Ka como sigue:
( )
db0jKalog20 2
a
=ω
2aKa ω=
Kaa =ω
ωa
-20 lg Ka
db
1
Fig. 5.3 Diagrama de amplitud logarítmica para un sistema tipo dos

VII. DIAGRAMAS POLARES PS-2320 CONTROL DE PROCESOS II
VI. RESPUESTA FRECUENCIAL PARA SISTEMAS A LAZO CERRADO Para un sistema a lazo cerrado de retroalimentación simple se tiene que M(s) se define
como la Función de Transferencia a lazo cerrado, la cual sería:
)s(H)s(G1)s(G
)s(R)s(C)s(M
+== y la respuesta frecuencial a lazo cerrado sería
)j(M)j(M)j(H)j(G1
)j(G)j(M ω<ω=ωω+
ω=ω , es decir se tendrá también un módulo y un
ángulo que podrán ser representados a través de un diagrama de bode.
En la siguiente figura se muestra un diagrama de bode para un sistema típico de control.
20 log |M(jw)| 0 db -3db
WB
K=1
Fig. 6.1 Diagrama de Bode de un sistema a lazo cerrado
WB se conoce como ancho de banda (BW). El valor de – 3db proviene del estudio de
amplificadores. A esa frecuencia WB la salida ha decaído a la mitad de su valor a baja
frecuencia.
El ancho de banda de un sistema de control es una indicación de las propiedades del
sistema en el dominio del tiempo. Un ancho de banda grande corresponde a una mayor
rapidez de la respuesta, pero dado que el ruido ocurre a altas frecuencias el Ancho de
Banda no debe ser muy grande.
Prof. Jenny Montbrun Di Filippo 23 Prof. Yamilet Sánchez Montero

VII. DIAGRAMAS POLARES PS-2320 CONTROL DE PROCESOS II
VII. DIAGRAMAS POLARES
El diagrama polar de G(jω) es una representación de la respuesta frecuencial de un sistema,
el cual esta formado por una gráfica de la magnitud de G(jω) contra el ángulo de fase para
variaciones de ω de 0 a infinito. Para la obtención de un diagrama polar se mostrará a
continuación el procedimiento a seguir para diferentes casos.
7.1 FACTORE INTEGRALES Y DERIVATIVOS G(S) = (S) +1
G(jω) = (jω)+1
Se realizará el desarrollo para el caso de un polo.
G(jω) = ⎟⎠⎞
⎜⎝⎛
ω−=
ω1j
j1
ω=ω
1)j(G
Re = 0
Im = ω
−1
De allí se puede observar que
w= ∞
w= ∞ w= 0
G= S
G= 1/S
w= 0
7.1 DIAGRAMA POLAR PARA FACTORES INTEGRALES Y DERIVATIVOS
ω = 0 |G(jω)| → ∞
ω→ ∞ |G(jω)| → 0
Además, el diagrama será un recorrido por el eje imaginario negativo por lo que la fase
será siempre - 90°
)j(G ω = φ = °−=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡ω
−90
0
1arctg
En la figura 7.1 se puede apreciar el Diagrama Polar para un polo y para un cero. Cabe
resaltar que al conocer el Diagrama de Bode para éste término, puede servir de apoyo para
la obtención del Diagrama Polar
Prof. Jenny Montbrun Di Filippo 24 Prof. Yamilet Sánchez Montero

VII. DIAGRAMAS POLARES PS-2320 CONTROL DE PROCESOS II
7.2 FACTORES DE PRIMER ORDEN G(S) = (S+1) +1
Para el caso de un polo se tiene:
τs11)s(G
+=
ω+=ω
τj11)j(G
multiplicando el numerador y el denominador por el conjugado se obtiene:
( )( ) 22τ1τj1
τj1τj1τj1)j(G
ω+
ω−=
ω−ω+ω−
=ω
jτ1τ
τ11)j(G
2222 ω+
ω−
ω+=ω
Para graficar se evalúan para distintas ω:
w=∞ w=0
w=1/ τ
G= τs+1
G= 1/ (τs+1)
1
7.2.1 DIAGRAMA POLAR PARA FACTORES DE PRIMER
ORDEN
ω = 0 → Re =1 , Im = 0 → |G(jω)| = 1 , φ = 0
ω= 1/ τ → Re = 1/2 , Im = -1/2 → |G(jω)| = 22 , φ = 45°
ω→ ∞ → Re → 0 , Im = 0 → |G(jω)| = 0 , φ = 90°
En la figura 7.2.1 se puede apreciar el Diagrama Polar para un polo y para un cero.
Igualmente se puede observar la similitud entre dicho diagrama y el correspondiente
Diagrama de bode
Por convención el ángulo es positivo si se mide contrario a las agujas del reloj.
Prof. Jenny Montbrun Di Filippo 25 Prof. Yamilet Sánchez Montero

VII. DIAGRAMAS POLARES PS-2320 CONTROL DE PROCESOS II
Si se le agrega un polo en el origen a G(s) se tiene:
( )1sτs1)s(G+
=
( )1jτj1)j(G
+ωω=ω
( )( )( )
( )( )222
2
2
2
2 )τ(jτ-
jτ-jτ-
jτ-1)j(G
ω+ω
ω−ω=
ω−ω
ω−ω
ω+ω=ω
Separando la parte real (Re) de la parte imaginaria
(Im)
j)1τ(
1)1τ(
τ-)j(G2222 +ωω
−+ω
=ω
φ
w = oo
w=1/τ
w= 0
7.2.2 DIAGRAMA POLAR AÑADIÉNDOLE UN POLO EN
EL ORIGEN
Graficando para valores extremos de ω y para 1/ τ se tiene:
ω = 0 Re = - τ , Im → -∞ |G(jω)| → ∞ , φ = 90°
ω = 1/ τ Re = - τ/2 , Im = - τ/2 |G(jω)| = - finito, φ = 135°
ω → ∞ Re → 0 , Im = 0 |G(jω)| = 0 , φ = 180°
En la figura 7.2.2 se observa como la adición de términos en el Diagrama polar no se puede realizar
tan fácilmente como se hace para los Diagramas de Bode.
7.3 POLOS Y CEROS CONJUGADOS G(s) = 1
2
2
n
ξ21±
⎥⎦
⎤⎢⎣
⎡++
nwss
w
Siguiendo igual procedimiento al anterior, se tiene que: ω = 0 |G(jω)| →1 , φ = 0°
ω → ∞ |G(jω)| = 0 , φ = - 180°
Apoyándose en el conocimiento del Diagrama de Bode para dichos términos, se puede representar
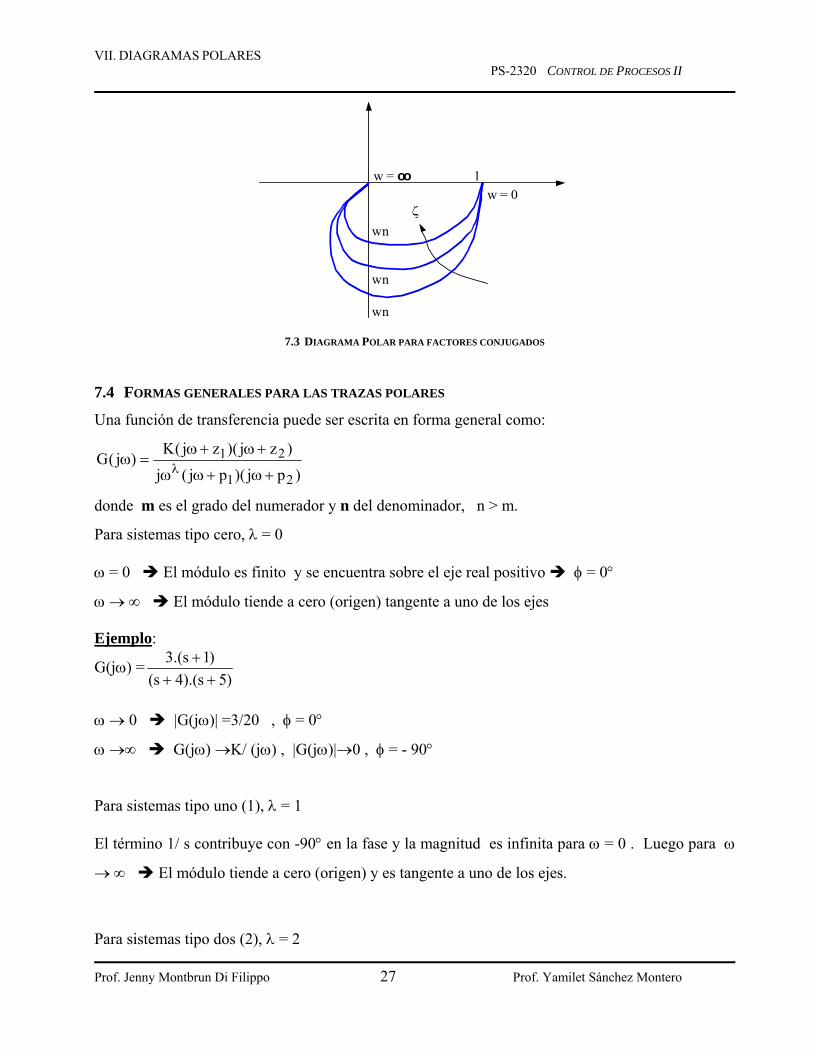
el Diagrama Polar tal como se muestra en la figura 7.3
Prof. Jenny Montbrun Di Filippo 26 Prof. Yamilet Sánchez Montero
VII. DIAGRAMAS POLARES PS-2320 CONTROL DE PROCESOS II
w = oo 1 w = 0
wn wn wn
ζ
7.3 DIAGRAMA POLAR PARA FACTORES CONJUGADOS
7.4 FORMAS GENERALES PARA LAS TRAZAS POLARES
Una función de transferencia puede ser escrita en forma general como:
)pj)(pj(j
)zj)(zj(K)j(G21
21
+ω+ωω
+ω+ω=ω
λ
donde m es el grado del numerador y n del denominador, n > m.
Para sistemas tipo cero, λ = 0 ω = 0 El módulo es finito y se encuentra sobre el eje real positivo φ = 0°
ω → ∞ El módulo tiende a cero (origen) tangente a uno de los ejes Ejemplo:
G(jω) = )5s).(4s(
)1s.(3++
+
ω → 0 |G(jω)| =3/20 , φ = 0°
ω →∞ G(jω) →K/ (jω) , |G(jω)|→0 , φ = - 90° Para sistemas tipo uno (1), λ = 1 El término 1/ s contribuye con -90° en la fase y la magnitud es infinita para ω = 0 . Luego para ω
→ ∞ El módulo tiende a cero (origen) y es tangente a uno de los ejes.
Para sistemas tipo dos (2), λ = 2
Prof. Jenny Montbrun Di Filippo 27 Prof. Yamilet Sánchez Montero
VII. DIAGRAMAS POLARES PS-2320 CONTROL DE PROCESOS II
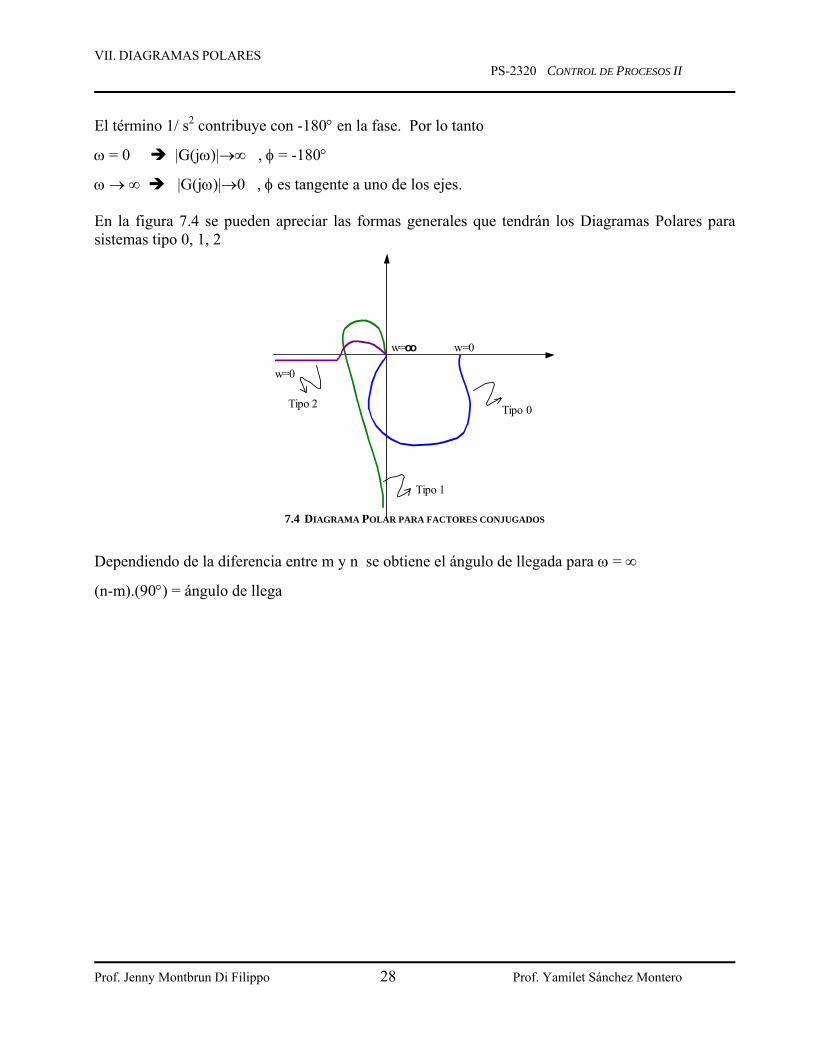
El término 1/ s2 contribuye con -180° en la fase. Por lo tanto
ω = 0 |G(jω)|→∞ , φ = -180°
ω → ∞ |G(jω)|→0 , φ es tangente a uno de los ejes. En la figura 7.4 se pueden apreciar las formas generales que tendrán los Diagramas Polares para sistemas tipo 0, 1, 2
Tipo 0
Tipo 1
Tipo 2
w=oo w=0
w=0
7.4 DIAGRAMA POLAR PARA FACTORES CONJUGADOS
Dependiendo de la diferencia entre m y n se obtiene el ángulo de llegada para ω = ∞
(n-m).(90°) = ángulo de llega
Prof. Jenny Montbrun Di Filippo 28 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
VIII. Criterio de Estabilidad de Nyquist
Un sistema de control de retroalimentación simple como el mostrado en la figura 8.1, es
estable si su Ecuación Característuica a Lazo Cerrado, F(s) = 1 + G(s)H(s), no tiene ninguna raíz
con parte real positiva.
+
-
)s(H
G(s)C(s)R(s)
)S(H G1)S(G
)S(R)S(C
+=
Fig. 8.1 Esquema de Control de Retroalimentación Simple
El criterio de estabilidad de Nyquist relaciona la respuesta frecuencial a lazo abierto con la
estabilidad a lazo cerrado; basado en un teorema de la variable compleja que se fundamenta en el
mapeo de los contornos en el plano complejo. Parte de los fundamentos que dan base al criterio de
estabilidad se nombrarán a continuación.
• Para una trayectoria cerrada y continua en el plano S, que no pasa por ninguna singularidad, le
corresponde una trayectoria cerrada en el plano F(s).
• Si el contorno en el plano S (Γs ), encierra igual número de ceros que polos de F(s), el contorno
en F(s), (ΓF (s) ), no encerrará el origen.
• Si el Γs encierra n polos de F(s), ΓF (s) rodea al origen n-veces en sentido antihorario.
• Si el Γs encierra m ceros de F(s), ΓF (s) rodea al origen m-veces en sentido horario.
EJEMPLO:
Una función de s, tal como F(s), transforma una trayectoria cerrada del plano s (Γs ), sobre el plano
F(s), en una trayectoria cerrada en el plano F(s) (ΓF (s)). Como se mencionó anteriormente, F(s)
corresponderá con la ecuación característica a lazo cerrado, por lo que se tiene que:
Si G(s)H(s)1
s 1=
+ ⇒ F(s) 1
1s 1
= ++
F(s) sólo tiene un cero en s = - 2 y un polo en s = - 1.
Prof. Jenny Montbrun Di Filippo 29 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
Para este ejemplo, se tomarán dos contornos en el plano s (Γs) y se realizaran las transformaciones
de dichos contornos utilizando F(s). Tanto los contornos, como sus correspondientes
transformaciones se muestran en las figuras 8.2 y 8.3.
Pto s F(s) A -3 0,5 B j 1,5 – 0,5 j C 1 1,5 D -j 1,5 + 0,5 j
Encierra un polo y un cero
No encierra el origen
FIG. 8.2 PRIMER ΓS Y SU TRANSFORMACIÓN AL PLANO F(S) Pto s F(s) A -3 0,5 B j 1,5 – 0,5 j C 1 1,5 D -j 1,5 + 0,5 j
Encierra el origen una vez
Encierra un cero
FIG. 8.3 SEGUNDO ΓS Y SU TRANSFORMACIÓN AL PLANO F(S)
El área encerrada está a la derecha del recorrido cuando se mueve en sentido horario, por lo que
en el primer caso el Γs encierra un polo y un cero de F(s) y en el segundo caso, el Γs encierra un
cero de F(s). Como puede observarse, en el primer caso el ΓF (s) , no encierra el origen pues el
número de ceros y polos de F(s) encerrados en el Γs son iguales. En el segundo caso, el ΓF (s)
encierra al origen una vez, pues existe un cero de F(s) encerrado en el Γs .
Generalizando el Teorema del Mapeo, se tiene que,
)s(ND(s) F(s) Si =
Prof. Jenny Montbrun Di Filippo 30 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
para un Γs que encierre Z ceros y P polos de F(s) sin pasar por encima de ningún cero o polo de
F(s), el ΓF (s) encerrará el origen en sentido horario un número de veces igual a N = Z - P.
Dicho teorema se utilizará para tener información respecto a los ceros y los polos de F(s)
encerrados en un Γs específico.
8.1 Aplicación al análisis de la estabilidad a lazo cerrado Para realizar un análisis de la estabilidad a lazo cerrado a partir de la respuesta frecuencial a lazo
abierto, utilizando el Teorema del Mapeo, se deben tener las siguientes consideraciones:
• F(s) será la Ecuación Característica a Lazo Cerrado, es decir, F(s) = 1 + G(s)H(s)
• El Γs a utilizar será el semiplano derecho del plano S, tal como se muestra en la figura 8.4
• Z = # ceros de lazo cerrado de F(s) en el semiplano derecho del plano S
• P = # polos de G(s)⋅H(s) en el semiplano derecho del plano S
• N = Z - P el número de vueltas en sentido horario que ΓF ( s ) le da al origen.
Im
Re
Plano S
FIG. 8.4 ΓS EQUIVALENTE AL SEMIPLANO DERECHO
De manera que, para que el sistema sea estable, Z debe ser cero, lo que se lográ en los siguientes
casos:
• Si P = 0 entonces N debe ser cero
Si P ≠ 0 entoncer N deber ser igual a -P. •
•
•
De allí se desprende que, si se conocen los polos de lazo abierto (P) y los encierros que da al
origen el ΓF ( s ) (N), se puede saber si existen ceros con parte real positiva (Z).
Para particularizar la aplicación del criterio a un sistema de control de retroalimentación simple,
se propone lo siguiente:
Definir F’(s) = F(s) – 1 = G(s)H(s)
P’ y Z’ de F’(s) corresponden con los polos y ceros de lazo abierto
Prof. Jenny Montbrun Di Filippo 31 Prof. Yamilet Sánchez Montero
VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
•
•
•
•
•
•
•
•
)
La transformación sobre el Plano F’(s), se realiza tomando en cuenta que el Γs no debe pasar
por ningún polo o cero de F’(s)
El encierro del origen por el ΓF(S) es equivalente a encerrar el punto (-1,0) por el contorno
ΓF’(S).
El ΓF’(s) se conoce como el Diagrama de Nyquist.
N’ corresponde al número de encierros que le da el ΓF’(s) al punto (-1,0)
El valor de Z, ceros de la Ecuación característica a lazo cerrado, se puede conocer a partir de
N’ y de P, pues N’ = Z – P
Si P = 0 entonces Z = N’ por lo tanto el ΓF’(s) no debe encerrar al punto (-1,0) para que el
sistema sea estable. En este caso, es suficiente realizar la traza del Nyquist para s = jω y
verificar si encierra al (-1,0), lo cual equivale a realizar el diagrama polar de G(jω)H(jω).
Si P ≠ 0 se tiene que el sistema a lazo abierto es inestable, pero a lazo cerrado puede ser
estable. En este caso, se hace necesario realizar el Diagrama de Nyquist completo para
conocer el valor de N’ y verificar la estabilidad.
Si ΓF’ (S) pasa por (-1,0) entonces los ceros de la Ecuación Característica a Lazo Cerrado se
encuentran sobre el eje jω y el sistema a lazo cerrado será críticamente estable.
A continuación se mostrará varios ejemplos para ilustrar el criterio de estabilidad de Nyquist.
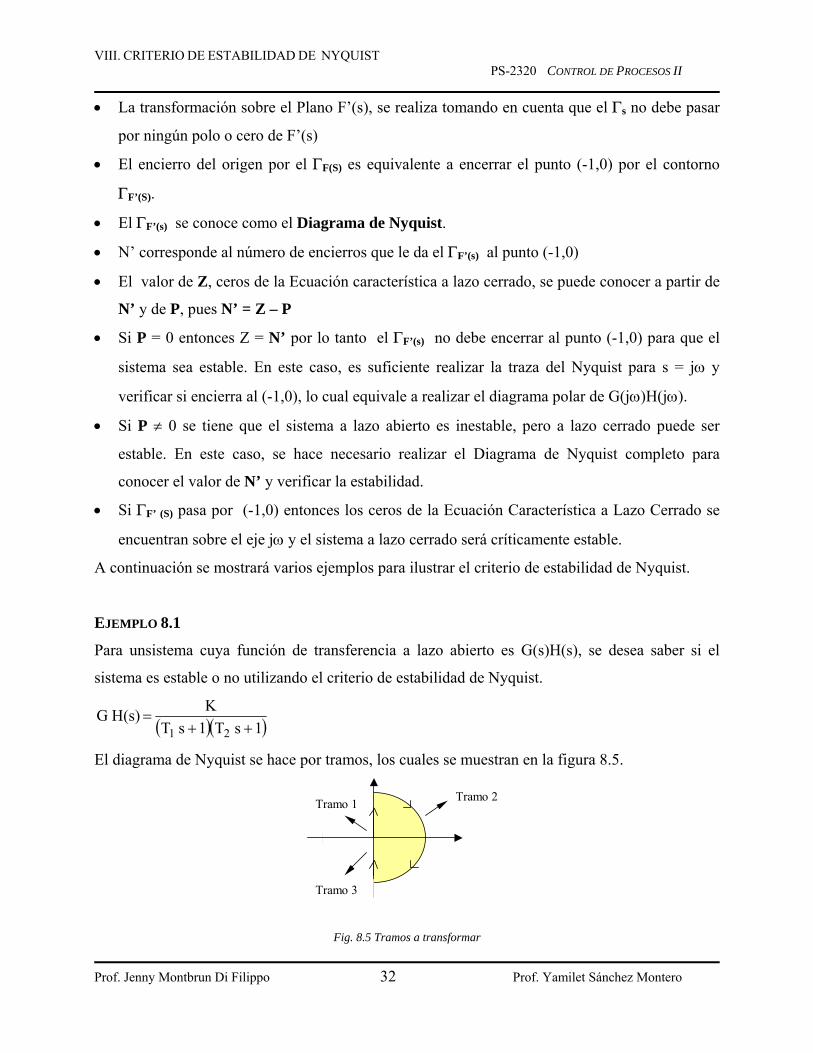
EJEMPLO 8.1
Para unsistema cuya función de transferencia a lazo abierto es G(s)H(s), se desea saber si el
sistema es estable o no utilizando el criterio de estabilidad de Nyquist.
( )( 1s T1s TK H(s) G
21 ++=
El diagrama de Nyquist se hace por tramos, los cuales se muestran en la figura 8.5.
Tramo 2 Tramo 1
Tramo 3
Fig. 8.5 Tramos a transformar
Prof. Jenny Montbrun Di Filippo 32 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
Tramo 1 Se representa sustituyendo s = jω en G(s)H(s), equivalente al diagrama polar.
2)j1)(Tj(TKG(s)H(s)
21 +ω+ω=
evaluándo para los extremos se tiene:
ω → 0 | GH | = K φ = 0º
ω → ∞ | GH | = 0 φ = -180º
Es bueno resaltar que, el sistema es de tipo “0” y la que diferencia entre el número de polos y el
numero de ceros de la función de transferencia es n-m = 2. En la figura 8.6 se puede apreciar el
Diagrama de Nyquist, donde se aprecia la transformación de este tramo.
Tramo 2 Se representa sustituyendo s = σ e j θ en G(s)H(s), lo cual representa una trayectoria circular
definida por los valores de σ y θ
σ → ∞ 90º ≥ θ ≥ - 90º
De allí que, el límite de G(s)H(s) cuando σ → ∞ será:
j 2eKG(s)H(s) es
Lim 2jwθ−
σ=
σ→
σ → ∞ | GH | → 0
θ = 90º φ = - 180º
θ = - 90º φ = 180º
Real Axis
Nyquist Diagrams
-2 0 2 4 6 8 10 -6
-4
-2
0
2
4
6
Tramo 1
Tramo 2
Tramo 3
Fig. 8.6 Diagrama de Nyquist
Lo que se reduce a la transformación del origen, tal como se observa el la figura 8.6
Tramo 3 Se representa sustituyendo s = - jω en G(s)H(s), equivalente a una trayectoria simétrica, respecto
al eje real, a la trayectoria derivada en el tramo uno (figura 8.6).
Prof. Jenny Montbrun Di Filippo 33 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
CONCLUSIÓN
Como P = 0 (el Γs no encierra ningún polo de G(s)H(s)) y N = 0 (el Diagrama de Nyquist no
encierra el punto (-1,0)), entonces Z = 0 siendo el sistema estable.
Además, también se puede concluir que será estable para cualquier ganancia pues, a pesar que la
ganancia aumenta nunca se encerrará al punto (-1,0)
EJEMPLO 8.2
Para un sistema cuya función de transferencia a lazo abierto es G(s)H(s), se desea saber si el
sistema es estable o no utilizando el criterio de estabilidad de Nyquist.
2)s(T 1)s(T sKG(s)H(s)
21 ++=
La única diferencia entre este ejemplo y el anterior es que ahora el sistema es de tipo “1”, por lo
que el Γs debe rodear al origen quedando tal como se muestra en la figura 8.7
Tramo 2 Tramo 1
Tramo 4
Tramo 3
FIG. 8.7 TRAMOS A TRANSFORMAR
Tramo 1
Se representa sustituyendo s = jω en G(s)H(s), equivalente al diagrama polar.
( )( )1j T1j TjK)j(G
21 +ω+ωω=ω
ω → 0 | GH | = ∞ φ = -90º
ω → ∞ | GH | = 0 φ = -270º
Recuerde verificar que el sistema es de tipo “1” y que la diferencia entre el número de polos y de
ceros de G(s)H(s) es de m – n = 3 (figura 8.8)
Tramo 2 Se representa sustituyendo s = σ e j⋅θ en G(s)H(s), lo cual representa una trayectoria circular
definida por los valores de σ y θ.
Prof. Jenny Montbrun Di Filippo 34 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
σ → ∞ 90º ≤ θ ≤ - 90º
De allí que, el límite de G(s)H(s) cuando σ → ∞ será:
j 3eKG(s)H(s) es
Lim 3jwθ−
σ=
σ→
σ → ∞ | GH | → 0
θ = 90º φ = - 270º
θ = - 90º φ = 270º
Lo que se reduce a la transformación del origen, tal como se observa el la figura 8.8
Tramo 3 Se representa sustituyendo s = -jω en G(s)H(s), equivalente a una trayectoria simétrica, respecto
al eje real, a la trayectoria derivada en el tramo uno (figura 8.8).
Tramo 4 Se representa sustituyendo s = ε e j⋅θ en G(s)H(s), lo cual representa una trayectoria circular
definida por los valores de ε y θ.
ε → 0 -90º ≤ θ ≤ 90º
De allí que, el límite de G(s)H(s) cuando ε → 0 será:
j eKG(s)H(s) es
Lim jwθ−
ε=
ε→
ε → 0 | GH | → ∞
θ = -90º φ = 90º
θ = 90º φ = -90º
-1
ω = 0-
ω = 0+
Fig 8.8 Diagrama de Nyquist
Prof. Jenny Montbrun Di Filippo 35 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
LA TRANSFORMACIÓN RESULTA EN UNA SEMICIRCUNFERENCIA DE DIÁMETRO INFINITO.
CONCLUSIÓN
P = 0 (el Γs no encierra ningún polo de G(s)H(s)) y N depende del valor de la ganancia del
sistema, entonces la estabilidad del sistema tambien dependerá de dicha ganancia.
•
•
•
Para K pequeñas N = 0, por lo que el sistema será estable
Para K = K crítica entonces el Diagrama pasará sobre el (-1,0), sistema críticamente estable
Para K grandes N = 2, por lo el sistema será inestable.
EJEMPLO 8.3
Para el sistema cuya función de transferencia a lazo abierto sea G(s)H(s), realice un análisis de la
estabilidad y diga si depende de los valores T1 y T2.
G(s)H(s)K (T s 2)s (T s 1)
22
1=
++
Para este caso, se utiliza el mismo Γs que se muestra en la figura 8.7. Primero, se realizaran las
transformaciones de los tramos 2 y 4 pues no dependen de los valores de T1 y T2.
TRAMO 2
Se representa sustituyendo s = σ e j⋅θ en G(s)H(s), lo cual representa una trayectoria circular
definida por los valores de σ y θ.
σ → ∞ 90º ≤ θ ≤ - 90º
De allí que, el límite de G(s)H(s) cuando σ → ∞ será:
j 2eKG(s)H(s) es
Lim2jw
θ−
σ=
σ→
σ → ∞ | GH | → 0
θ = 90º φ = - 180º
θ = - 90º φ = 180º
Lo que se reduce a la transformación del origen.
Tramo 4
Se representa sustituyendo s = ε e j θ en G(s)H(s), lo cual representa una trayectoria circular
definida por los valores de ε y θ.
ε → 0 -90º ≤ θ ≤ 90º
Prof. Jenny Montbrun Di Filippo 36 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
De allí que, el límite de G(s)H(s) cuando ε → 0 será:
j eKG(s)H(s) es
Lim jwθ−
ε=
ε→
ε → 0 | GH | → ∞
θ = -90º φ = 180º
θ = 90º φ = -180º
La transformación resulta en una circunferencia de diámetro infinito
TRAMO 1
Se representa sustituyendo s = jω en G(s)H(s), equivalente al diagrama polar.
G(s)H(s)K(T jw 2)s (T jw 1)
2
12=
++
evaluándo para los extremos se tiene:
ω → 0 | GH | = ∞ φ = -180º
ω → ∞ | GH | = 0 φ = -180º
Es bueno resaltar que, el sistema es de tipo “0” y la que diferencia entre el número de polos y el
numero de ceros de la función de transferencia es n-m = 2.
Lo anterior define los extremos del diagrama que corresponden a esta transformación, pero la
forma de la misma depende de los valores de T1 y T2.
• Si T1 < T2 ocurre primero el cero y luego el polo, por lo que la variación en el ángulo de fase
será como la que se muestra en la figura 8.9. De allí que, a medida que aumenta ω la fase
tenderá a –1800 pasando por valores intermedios mayores que –1800 . El Diagrama de
Nyquist correspondiente será el que se observa en la figura 8.10
ω2 ω1
-180º
FIG. 8.9 ANGULO DE FASE PARA T1 < T2
-1ω = ∞
ω = 0
ω = 0
FIG. 8.10 DIAGRAMA DE NYQUIST PARA T1 < T2
Prof. Jenny Montbrun Di Filippo 37 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
• Si T1 = T2 el cero y el polo ocurren simultáneamente, por lo que sus contribuciones se anulan,
tal como se observa en la figura 8.11. De allí, que el Diagrama de Nyquist correspondiente será el
que se observa en la figura 8.12
-180º
ω1
ω2
FIG. 8.11 ANGULO DE FASE PARA T1 = T2
-1
FIG. 8.12 DIAGRAMA DE NYQUIST PARA T1 = T2
Si T1 > T2 el polo ocurre primero que el cero, teniendo la fase un comportamiento como el
que se muestra en la figura 8.13. De allí que, el recorrido de la fase desde –180° (ω = 0)
hasta -180° (ω → ∞) tendrá valores intermedios menores que -180°. El Diagrama de Nyquist
correspondiente será el que se observa en la figura 8.14.
•
ω1 ω2
-180º
FIG. 8.13 ANGULO DE FASE PARA T1 >T2
-1ω = ∞
ω = 0+
ω = 0-
FIG. 8.14 DIAGRAMA DE NYQUIST PARA T1 >T2
La transformación del tramo 3 será simétrica respecto al eje real para todos los casos. Debido a
que P = 0, el sistema será estable si N = 0, lo cual se resume a continuación para cada uno de los
casos.
Si T1 < T2 N = 0, por lo que el sistema es estable para todo K •
•
•
Si T1 = T2 N = 0, pero el diagrama de Nyquist pasa sobre (-1,0), por lo que el sistema es
críticamente estable
Si T1 > T2 N = 2, por lo que el sistema es inestable para todo K
Prof. Jenny Montbrun Di Filippo 38 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
8.2 ESTABILIDAD RELATIVA
Para sistemas que, a lazo abierto son de fase mínima, es decir, G(s)H(s) no tienen ni ceros ni
polos en el semiplano derecho es suficiente el trazo de Nyquist (para s = jω) para concluir
respecto a la estabilidad. Como P = 0 (fase mínima) entonces N debe ser cero para que el sistema
sea estable. A continuación se mostraran algunos diagramas de Nyquist generales que apoyan lo
anterior.
• Para sistemas tipo “0”, siempre se tendrá un Diagrama de Nyquist General como el que se
muestra en la figura 8.15, donde se puede apreciar que, la traza que representa la
transformación de s = jω, es suficiente para verificar el valor de N.
Suficiente con esta traza
n - m = 1 n - m = 2
FIG. 8.15 DIAGRAMAS DE NYQUIST GENERALES PARA SISTEMA TIPO “0”
• Para sistemas Tipo “1”, siempre se tendrá un Diagrama de Nyquist General como el que se
muestra en la figura 8.16, donde tambien se puede apreciar que, la traza que representa la
transformación de s = jω, es suficiente para verificar el valor de N
Transformación del origen
FIG. 8.16 DIAGRAMAS DE NYQUIST GENERALES PARA SISTEMA TIPO “1”
Prof. Jenny Montbrun Di Filippo 39 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
• Para sistemas tipo “2”, siempre se tendrá un Diagrama de Nyquist General como el que se
muestra en la figura 8.17, donde tambien se puede apreciar que, la traza que representa la
transformación de s = jω, es suficiente para verificar el valor de N
Transformación del origen
FIG. 8.17 DIAGRAMAS DE NYQUIST GENERALES PARA SISTEMA TIPO “2”
Además, la traza de Nyquist tambien indica el grado de estabilidad de un sistema estable. Se
podrá reconocer si un sistema es estable para cualquier valor de ganacia, o si por el contrario, la
estabilidad dependerá del valor de la ganancia.
A continuación, se definiran los conceptos de margen de fase y margen de ganancia, los cuales
indican el grado de estabilidad del sistema. En la figura 8.18, se muestra la traza de Nyquist para
un sistema cualquiera, la cual no encierra el punto (-1,0), lo que implica estabilidad aprecia que
tanto la ganancia como la fase tienen unos valores límites definidos por su cercanía con el punto
(-1,0). Dichos valores son Kg y γ, los margenes de ganancia y de fase respectivamente. Así
mismo, en la figura 8.19 se observan Kg y γ para un caso en que el sistema fuese inestable.
Margen de ganancia positivo
φ γ
Kg 1
- 1
γ Margen de fase positivo
Fig. 8.18 Kg y γ positivos
- 1 Kg 1
Margen de ganancia negativa
Margen de fase γ
negativo
Fig. 8.19 Kg y γ negativos
A continuación se definiran los margenes de ganancia y de fase.
Prof. Jenny Montbrun Di Filippo 40 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
• MARGEN DE GANANCIA
Es el inverso de la magnitud de |G(jω)| en la frecuencia en la cual la fase vale φ = -180º
1)j(G
1Kgωω
= ω1 → φ(ω1) = -180º
Kg (db) = 20 lg Kg = -20 log |G(jω1)|
• MARGEN DE FASE
Es la cantidad de atraso (φ negativa) en la frecuencia de cruce ( |G(jω1)| = 1) requerida para
llevar al sistema al límite de la estabilidad.
γ = 180º + φ
Para que un sistema sea estable su Margen de Fase (MF) y su margen de Ganancia (MG) deben ser
ambos positivos. Otra forma de representar la traza de Nyquist (s = jω) es a través de un
Diagrama de Bode, por lo que el MF y el MG se pueden obtener a partir del mismo, tal como se
muestra en la figura 8. 20.
Fig. 8.20 MF y MG en el Diagrama de Bode
Ejemplo 8.4
Para un sistema cuya función de transferencia a lazo abierto es G(s)H(s), indique si el sistema a
lazo cerrado es estable y cuales son MF y MG.
Prof. Jenny Montbrun Di Filippo 41 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
• CASO 1
G(s)H(s)600(s 2)
s(s 17s 70)2=+
+ +
El Diagrama de Bode para G(s)H(s) se observa en la figura 8.21, a partir del cual se lee:
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-25 0
25 50 75 Gm = Inf, Pm=35.477 deg. (at 22.985
d/ )
10 -2 10-1 100 101 102-180 -160 -140 -120 -100
-80 -60
Fig. 8.21 Diagrama de Bode Caso 1
20 lg | GH | = 0 db φ ≈ -143º → γ = 180º - 143º = 37º
φ → -180º 20 lg |G| → - ∞ db → MG = ∞ (+)
El sistema es estable, pues ambos márgenes son positivos.
• CASO 2
2)4s3ss(5s1)(3s
G(s)H(s)23 +++
+= Su diagrama de Bode se muestra a continuación.
Prof. Jenny Montbrun Di Filippo 42 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-100 -50
0 50
100
10 -3 10-2 10-1 100 10 1 -270 -240 -210 -180 -150 -120 -90 -60
Fig. 8.22 Diagrama de Bode Caso 2
20 lg | GH | = 0 db φ ≈ -250º → γ = 180º - 250º = -70º
φ → -180º 20 lg |G| → 20 db → MG (-)
El sistema es inestable, pues ambos márgenes son negativos.
• CASO 3
Si se eliminase el polo en el origen del sistema del caso anterior concluya respecto a la
estabilidad.
El diagrama de bode en este caso quedaría como se muestra a continuación.
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-60 -40 -20
0 20 Gm = Inf, Pm=17.054 deg. (at 1.1501 rad/sec)
10 -2 10-1 100 10 1 -200 -150 -100 -50
0 50
FIG. 8.23 DIAGRAMA DE BODE CASO 3
Prof. Jenny Montbrun Di Filippo 43 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
20 lg | GH | = 0 db φ ≈ -160º → γ = 180º - 160º = 20º
φ → -180º 20 lg |G| → - ∞ db → MG = ∞ (+)
El sistema es estable, pues ambos márgenes son positivos.
8.3 SISTEMAS DE FASE NO MÍNIMA Y SISTEMAS CON RETARDO
Para completar la representación de la respuesta frecuencial de sistemas incluyamos sistemas de
fase no-mínima y con retardo.
8.3 Sistemas de fase no mínima
Los sistemas de fase no-mínima son aquellos que tienen ceros o polos con parte real positiva. La
diferencia entre sistemas de fase mínima y los de fase no-mínima se presenta en la fase, tal como
se puede apreciar en los ejemplos que se mostraran a continuación.
EJEMPLO 8.3.1
Comparación entre el diagrama de bode para un cero en el eje real negativo y en el eje real
positivo
G1(s) =1 + Ts G2(s) = 1 –Ts sustituyendo s = jω
G1(jω) =1 + T jω G2(jω) = 1 –T jω
De allí, se puede observar que el módulo de ambas funciones es el mismo en tanto que la fase de
ambas difiere, tal como sigue:
21 1)( wjwG += 2
2 1)( wjwG +=
para el estudio de la fase se analizará como cambia ésta a medida que cambia ω
cuando ω → 0 para G1 Re → 1 Im → 0 (+) por lo que φ1 → 0°
para G2 Re → 1 Im → 0 (-) por lo que φ1 → 0°
cuando ω → ∞ para G1 Re → 1 Im → j∞ por lo que φ1 → 90°
para G2 Re → 1 Im → -j∞ por lo que φ1 → -90°
De allí, que el diagrama de bode para G1 es igual al estudiado hasta ahora, en tanto que para G2 se
tendrá un Diagrama de bode como se muestra en la siguiente figura.
Prof. Jenny Montbrun Di Filippo 44 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
FIG. 8.24 DIAGRAMA DE BODE PARA G2(S) = 1 - Ts
Se debe hacer resaltar que para el caso en que se tenga un cero con parte real positiva, donde
G3(s) = Ts-1, la fase tendrá un comportamiento diferente, tal como se muestra.
G3(jω) = T jω − 1
cuando ω → 0 Re → -1 Im → 0 (+) por lo que φ1 → 180°
cuando ω → ∞ Re → -1 Im → j∞ por lo que φ1 → 90°
Por lo tanto el diagrama de bode para G3(s) sera como se muestra en la figura 8.25.
FIG. 8.25DIAGRAMA DE BODE PARA G3(S) = Ts - 1
EJEMPLO 8.3.2
Para el caso de un polo con parte real positiva se presenta el siguiente ejemplo.
Ts11)s(G 3 −
= y haciendo s = jω, se tieneω−
=ωTj11)j(G 3
multiplicando por el conjugado arriba y abajo se tiene finalmente la función a representar,
223T1
)Tj1()Tj1)(Tj1(
)Tj1()j(Gω+
ω+=
ω+ω−ω+
=ω de donde,
Prof. Jenny Montbrun Di Filippo 45 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
( )( ) 22222
22
3T1
1
T1
T1jGω+
=ω+
ω+=ω
Prof. Jenny Montbrun Di Filippo 46 Prof. Yamilet Sánchez Montero
De allí que, el módulo de dicha función coincide completamente con el módulo del polo con
parte real positiva, tal como se describió en secciones anteriores, en tanto que la fase tendrá el
siguiente comportamiento:
cuando ω → 0 Re → 1 Im → 0 (+) por lo que φ1 → 0°
cuando ω → ∞ Re → 1 Im → j∞(+) por lo que φ1 → 90°
A partir de lo anterior se esboza el diagrama de bode para G3(s)
FIG. 8.26 DIAGRAMA DE BODE PARA G3(S) =1/ Ts - 1
Por lo tanto, se observa que los sistemas de fase no-mínina presentan una diferencia en la fase
con respecto hasta los estudiados hasta ahora .
En identificación para sistemas de fase mínima es suficiente con la curva de magnitud pero en los
de fases no-mínima debemos inspeccionar la φ
Por simple inspección en el diagrama de Bode se puede observar que, para sistema de fase
mínima, cuando la frecuencia tiende a infinito la pendiente en el diagrama de amplitud
logarítmica tiende a -20 dcdb ( m – n ) y la fase tiende a -90º ( m – n ). En tanto que, para
sistemas de fase no mínima, el comportamiento del diagrama de amplitud logarítmica es mismo,
pero la fase no se comporta de igual forma y debe ser analizada en forma particular.
8.4 SISTEMAS CON RETARDO
Son sistemas de fase no-mínima, cuya función se transferencia es:
G ( jω ) = e –jωT donde T… es retardo

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
La magnitud es siempre igual a 1 y la fase será igual a φ = -ωT (radianes) = -57,3 ωT ( grados ).
Su diagrama de Bode y su diagrama polar tendrán la siguiente forma
FIG. 8.27 DIAGRAMA DE BODE DEL RETARDO
FIG. 8.28 DIAGRAMA POLAR DEL RETARDO
8.5 SISTEMAS CONDICIONALMENTE ESTABLES
Para un sistema cuyo Diagrama de Bode a lazo abierto es el que se muestra, concluya respecto a
la estabilidad a lazo cerrado.
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-80 -60 -40 -20
0 20 40 60
10 -2 10-1 100 101 10 2 -280 -260 -240 -220 -200 -180 -160 -140 -120 -100 -80
FIG. 8.29 DIAGRAMA DE BODE
Prof. Jenny Montbrun Di Filippo 47 Prof. Yamilet Sánchez Montero

VIII. CRITERIO DE ESTABILIDAD DE NYQUIST PS-2320 CONTROL DE PROCESOS II
A partir del diagrama se lee:
Para ω1 φ = -180º 20 log |G| ≈ 4 db MG (-) ⇒ |G| > 1
Para ω2 20 log |G| = 0 db φ ≈ -200º γ = -20º MF (-)
Para ω3 φ = -180º 20 log |G| ≈ -10 db MG (+) ⇒ |G| < 1
Para ω4 φ = -180º 20 log |G| ≈ - 20 db MG (+) ⇒ |G| < 1
En un caso como éste se debe recurrir al Diagrama de Nyquist para verificar si se encierra o no al
(-1,0). En la siguiente figura se aprecia dicho diagrama, donde se puede observar que el sistema
es estable, pero que dicha estabilidad dependerá del valor de K.
Encierra 2 veces el punto (-1,0) ⇒ INESTABLE!!!
Prof. Jenny Montbrun Di Filippo 48 Prof. Yamilet Sánchez Montero

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA PS-2320 CONTROL DE PROCESOS II
IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA A continuación se describirán los métodos utilizados para diseñar los diferentes tipos de
compensadores basados en la respuesta frecuencial del sistema (Diagrama de Bode). Los
compensadores a diseñar serán:
Compensadores en Adelanto.
Compensadores en Atraso.
Compensadores Adelanto – Atraso.
9.1 COMPENSACIÓN EN ADELANTO Estos compensadores son semejantes a un PD (Proporcional Derivativo), el cual
fundamentalmente tiene su acción sobre la respuesta transitoria del sistema. Se puede expresar a
través de la siguiente función de transferencia:
1α 0,05 1Ts α
1Tsα KcαT1sT1s
KcGc(s) >>⎟⎠⎞
⎜⎝⎛
++
=⎟⎟⎠
⎞⎜⎜⎝
⎛++
=
donde α y T son los parámetros del controlador a diseñar.
A partir de la función de transferencia del compensador se realizará tanto su diagrama polar como
su Diagrama de Bode, con la intención de visualizar el efecto que tendría añadir un compensador
de este tipo sobre la respuesta frecuencial de un sistema.
⎟⎟⎠
⎞⎜⎜⎝
⎛+ωα
+ωα=ω
1j T1j T)j(Gc
ω = 0 | G | = α
φ = 0º
ω → ∞ | G | = 1
φ = 0º
φmax
ω = ∞
α 1
α D
X
ω = 0
FIGURA 9.1 DIAGRAMA POLAR DE UN COMPENSADOR EN ADELANTO
Prof. Jenny Montbrun Di Filippo 49 Prof. Yamilet Sánchez Montero

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
En la figura 9.1 se puede observar el Diagrama Polar correspondiente, donde se aprecia que
la fase comienza y termina en 0º, pasando por un máximo (φm) cuyo valor depende de α tal
como se describe a continuación.
21R α−
= 2
12
1x α+=α+
α−=
α+α−
=α+
α−
=φ11
21
21
)m( Sen
φm es el máximo adelanto de fase que puede añadir el compensador, que para el caso de α =
0.05 es igual a 65o. A partir de la función de transferencia del compensador, también se
puede hacer el Diagrama de Bode para α = 0,1 donde se aprecia la ocurrencia de φm a una
frecuencia ωm. El cero ocurre en ω = T1 y el polo ocurre en ω =
T10
ω → 0 | G | = α
20 log | G | = 20 log α
20 log (0,1) = -20 db ω → ∞ db → 0 | G | = 1
ωm
φm
ω
φ
-20
T1 T10
10 log α 10 log α ω
20log|G|
FIGURA 9.2 DIAGRAMA DE BODE PARA UN COMPENSADOR ADELANTO (α = 0,1)
El máximo adelanto, φm, ocurre a ωm, frecuencia que corresponde con la media logarítmica
entre 1/T y 1/αT
⎟⎠⎞
⎜⎝⎛
α+=ω
T 1lg
T1lg
21 lg m , de allí que
α=ω
T1
m
Evaluando el módulo del compensador a esa frecuencia se tiene:
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 50

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
α=α=ω lg 10lg20Glg20mc
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 51
lo cual se observa en la figura 9.2. A continuación se describirá paso a paso, el
procedimiento a utilizar para el diseño de un compensador en adelanto dadas unas
especificaciones.
9.1.1 PROCEDIMIENTO DE DISEÑO
1) Cálculo de la ganancia K necesaria para satisfacer la condición de error.
2) Obtención del Diagrama de Bode para esa ganancia.
3) Revisar el MF del sistema sin compensar y calcular el ángulo necesario al añadir la
siguiente forma:
φm = MF deseado - MF original + ∆φ
El ∆φ que se añade tiene la intención de corregir el desplazamiento a la derecha de la
frecuencia de corte o cruce de ganancia (ωcorte). Generalmente tiene valores entre 6º y 12º
4) A partir del φm deseado se determina α.
α+α−
=φ11)( Sen m
5) Conocido α se calcula la amplitud logarítmica que tendrá el compensador a la
frecuencia ωm
10lgα α20lgωG20lg mc ==
Dicho valor se utiliza para ubicar ωm en forma gráfica, utilizando el diagrama de Bode, el
cual debe ser verificado numéricamente.
6) Conocido ωm y α se calcula T utilizando la expresión de ωm
α=ω
T1
m
7) Finalmente, se introduce una ganancia igual a 1/α para garantizar que el compensador
tenga una ganancia igual a uno.
8) Se debe verificar que se cumpla lo requerido.

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
EJEMPLO 9.1.2
Para el sistema que se muestra a continuación diseñe un compensador tal que, a lazo
cerrado se cumpla con las siguientes restricciones:
MF = 45º MG ≥ 8 db Kv = 4 s-1
Gc ( )( )1s1s 1,0s
1++
-
+
FIGURA 9.3 DIAGRAMA DE BLOQUES DEL SISTEMA
SOLUCIÓN:
1) Se calcula la ganancia para satisfacer Kv
4 Kc 1)s(H G s LimKv0s
=⇒==→
(Ganancia del compensador, para satisfacer el error)
2) Con ese valor de ganancia se realiza el Diagrama de Bode del sistema a lazo abierto
(Fig. 9.3)
3) Del Diagrama de Bode se lee aproximadamente el margen de fase y de ganancia del
sistema original MF (original) ≈ 17º y MG (original) ≈ 8 db
A partir de allí, se estima la fase necesaria a añadir como:
φm = 45º - 17º + 12º = 40º
4) Con el φm se calcula el valor de α
0,21α 11 Sen m =⇒
α+α−
=φ
5) Para identificar la frecuencia donde ocurra el φm se calcula el valor el 10 lg α que será
introducido por el compensador para ω = ωm
20 lg⏐Gc⏐ωm = db 778,6 )21,0lg(10 lg10 −==α
A partir del Diagrama de Bode se lee aproximadamente un ωm ≈ 3. Se verifica
numéricamente que ⏐G(jω)⏐ para ω = 3 sea cercano a los – 6,77 db, dado que el
compensador introducirá los mismos decibeles pero negativos.
1j3 1j3,0 j34lg20Glg20 3m ++
==ω
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 52

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
162,3044,134lg20Glg20 3m ××
==ω
87,7Glg20 3m −==ω db
Como el valor es más grande que los – 6.77db esperados, se supone un ωm menor, ωm = 2,8
97,20385,18,24lg20Glg20 8,2m ××
==ω
69,6Glg20 8,2m −==ω
De aquí se concluye que ωm = 2,8
Frequency (rad/sec)
Pha
se (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-80
-60-40
-200
2040
60
10-2 10-1 100 101 102-270
-240
-210
-180
-150
-120
-90
FIGURA 9.4 DIAGRAMA DE BODE PARA )1s)(1s1,0(s
4)s(G
++=
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 53
6) Conocido ωm y α se calcula T
7793,021,08,2
1T T
1m ==⇒
α=ω
Con el valor de α y T se tiene el compensador definido completamente.

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
1101,6s2831,1sKc
T1sT1s
Kc)s(GC ++
=α+
+=
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 54
7) Se multiplica Kc por 1/α para evitar la atenuación.
21,04KKcfinal =
α=
Finalmente la función de transferencia a lazo abierto quedará como:
)1s)(1s1,0(s1
1101,6s2831,1s
21,04G(s) (s)GC ++
⋅⎟⎠
⎞⎜⎝
⎛++
=
8) Verificación
Se verifica numéricamente que ω = 2,8 sea verdaderamente la frecuencia de corte.
( )( )1j8,21j28,0j8,21
1101,6j8,22831,1j8,2
21,04G G 8,2C ++⎟⎟
⎠
⎞⎜⎜⎝
⎛++
==ω
( )( )( ) 004,197,20385,18,2
172,608,3
21,04
=⋅⋅=
db 0035,0G Glg 20 C =
Ahora se calcula la fase del sistema compensado para dicha frecuencia.
φω = 2,8 = 65,41º - 24,62º - 90º - 70,34º - 15,64º = -135,2º
MF final ≈ 44,8º
En cuanto al MG se puede concluir lo siguiente: Inicialmente el requerimiento se cumplía,
la frecuencia de corte aumentó pero la fase también aumentó, por lo que se puede suponer
que el MG se sigue cumpliendo.
EJEMPLO 9.1.3
Para el siguiente sistema cuya F.T.L.A )1(
1)(+
=ss
sGH es se requiere que cumpla las
siguientes características. MF = 40º MG ≥ 8 db Kv = 50
SOLUCIÓN
1) Se calcula la ganancia necesaria para satisfacer el error.
50K 1GG s LimKv cc0S=⇒==
→

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
2) Se realiza el Diagrama de Bode (figura 9.5)
3) Se lee el MF y MG
MF ≈ 8º MG = ∞ db φm = 50º - 8º + 6º = 48º
4) Se determina α:
0,15 11 Sen m =α→
α+α−
=φ
Frequency (rad/sec)
Pha
se (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-20-10
01020304050607080
10-2 10-1 100 101-180-170-160-150-140-130-120-110-100-90
FIGURA 9.5 DIAGRAMA DE BODE PARA G(S) = 50 / S (S+1)
5) Se calcula el valor en amplitud logarítmica que se compensará en ωm
20 lg⏐G⏐ωm = 10 lg α = -8,24
6) Se identifica del Diagrama de Bode ωm, donde se toma ωm =10 como primera
aproximación y se verifica
4975,0049,1010
501j10 j10
50G 10n =⋅
=+
==ω
20 lg|G|ω=10 = - 6,06 db. Este valor es bastante menor que 10 lg α, por lo que se prueba
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 55

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
con un ωm mayor. (ωm = 12)
346,004,1212
501j12 j12
50G12n
=⋅
=+
==ω
20 lg|G|ω=12 = - 9,21
Se redujo la diferencia apreciablemente, por lo que se toma ωm = 12 como definitivo.
7) Se calcula T a partir ωm y α
6476,4T1 2152,0
15,0121T
T1
m ===→α
=ω
8) De allí que, la función de transferencia será:
984,30s6476,4s
15,01)s(G C +
+⋅=
9) Verificación:
Primero se revisa si el ωm coincide con la frecuencia de corte. Para ello, se evalúa el
módulo |G⋅Gc|ω = 12, esperando que sea aproximadamente 1
893,02266,330416,1212
8686,125015,01GG 10c =
⋅⋅⋅
⋅==ω
20 lg| G Gc |ω=12 = - 0,978 db
Se considera aceptable y se calcula la fase para esa frecuencia
( ) º57,127º17,21º2364,85º90º8286,68GG10c −=++−=
=ω
De allí, que el MF será:
MF = 52,42º
y el MG sigue siendo infinito.
9.2 COMPENSACIÓN EN ATRASO
La función de transferencia del compensador es de la forma
151 T1s
T1s11s T
1s T )s(Gc <β<⎟⎟⎠
⎞⎜⎜⎝
⎛β+
+β
=+β
+=
En este caso, primero ocurre el polo y luego el cero. De igual forma que en el caso del
compensador en adelanto, se graficará el Diagrama Polar y el Diagrama de Bode del
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 56

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
compensador en atraso para visualizar su efecto sobre la respuesta frecuencial del sistema.
La intención al introducir este compensador es provocar una atenuación de la amplitud
logarítmica a alta frecuencia, de forma tal que, la frecuencia de corte o de transición de
ganancia se desplace a lugares más favorables para el cálculo del margen de fase.
El diagrama Polar que se muestra en la figura 9.6 es semejante al del adelanto, pero la fase
sería siempre negativa, de allí que se le conoce como atraso de fase.
FIGURA 9.6 DIAGRAMA POLAR DE UN COMPENSADOR EN ATRASO
El diagrama de Bode para un β = 10 se puede observar en la figura 9.7, donde se aprecia el
atraso de fase y la atenuación provocada en el diagrama de amplitud logarítmica.
FIGURA 9.7 DIAGRAMA DE BODE DE UN COMPENSADOR EN ATRASO
Numéricamente, dicha atenuación a alta frecuencia será:
20 log ⎟⎟⎠
⎞⎜⎜⎝
⎛β1 = - 20 log β
ω = 0
11/β
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 57

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
La intención al añadir este tipo de compensador es utilizar el efecto producido por la
atenuación a alta frecuencia para modificar la frecuencia de cruce de ganancia, tratando de
evitar el efecto negativo del atraso de fase.
9.2.1 PROCEDIMIENTO DE DISEÑO
1. Calcular la K requerida para satisfacer el error.
2. Realizar el Diagrama de Bode para dicha ganancia.
3. A partir de allí, verificar el MF y MG del sistema original.
4. Por inspección del diagrama se ubica la frecuencia a la cual ocurre la fase necesaria
para satisfacer el MF requerido . El ∆φ añadido tiene la intención de contrarestar la
pequeña fase negativa introducida por el compensador a altas frecuencias.
MF requerido + (5º - 12º) implica la ωc nueva (0 db).
5. Se escoge esa frecuencia como la nueva frecuencia ωc nueva .
6. Se fija 1/T una década por debajo de dicha frecuencia (ωc nueva).
7. Se determina β tal que el diagrama de amplitud tenga 0 db a esa frecuencia (ωc nueva).
8. Verificar que el sistema compensado satisfaga con los requerimientos establecidos.
EJEMPLO 9.2.2
Para un sistema, cuya función de transferencia a lazo abierto es la siguiente, se requiere que
satisfaga las siguientes condiciones:
⎟⎠⎞
⎜⎝⎛ +⎟
⎠⎞
⎜⎝⎛ +⎟
⎠⎞
⎜⎝⎛ +
=1
40s1
25s1
10ss
K )s(GH MG ≥ 10 db MF ≥ 45º Kv
≥ 20
SOLUCIÓN 1) Se calcula K para satisfacer el error. K = Kv = 20
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 58
IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
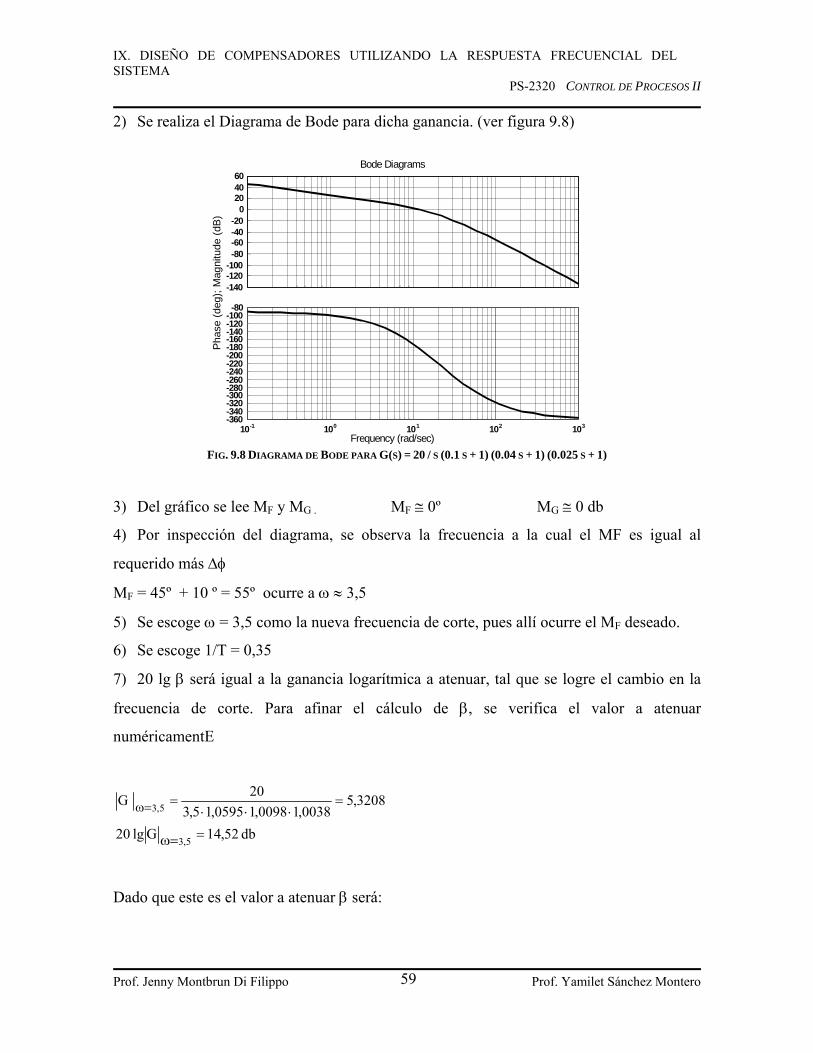
2) Se realiza el Diagrama de Bode para dicha ganancia. (ver figura 9.8)
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-140 -120 -100 -80 -60 -40 -20
0 20 40 60
10 -1 100 101 102 10 3 -360 -340 -320 -300 -280 -260 -240 -220 -200 -180 -160 -140 -120 -100 -80
FIG. 9.8 DIAGRAMA DE BODE PARA G(S) = 20 / S (0.1 S + 1) (0.04 S + 1) (0.025 S + 1)
3) Del gráfico se lee MF y MG . MF ≅ 0º MG ≅ 0 db
4) Por inspección del diagrama, se observa la frecuencia a la cual el MF es igual al
requerido más ∆φ
MF = 45º + 10 º = 55º ocurre a ω ≈ 3,5
5) Se escoge ω = 3,5 como la nueva frecuencia de corte, pues allí ocurre el MF deseado.
6) Se escoge 1/T = 0,35
7) 20 lg β será igual a la ganancia logarítmica a atenuar, tal que se logre el cambio en la
frecuencia de corte. Para afinar el cálculo de β, se verifica el valor a atenuar
numéricamentE
db 52,14Glg 20
3208,50038,10098,10595,15,3
20 G
5,3
5,3
==ω
=⋅⋅⋅
==ω
Dado que este es el valor a atenuar β será:
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 59

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
20 lg β = 14,52 db → β = 5,32
8) De allí, que la Función de Transferencia del compensador será:
⎟⎠⎞
⎜⎝⎛
++
=⎟⎟⎠
⎞⎜⎜⎝
⎛β+
+β
=0657.0s35,0s
32,51
T1sT1s
1 )s(Gc
9) Se verifica que a ω = 3,5 20 lg |G Gc| ≈ 0 db
031,1003,15,3009,10595,15,3
517,320 32,51 Gc G
5,3=⎟
⎠
⎞⎜⎝
⎛××××
⋅==ω
db 26,0 Gc Glg 205,3
⇒=ω (Aceptable)
Ahora se verifica el valor de la fase a esa frecuencia.
φω = 3,5 = 84,289 – (90º + 19,29 + 7,9696 + 5 + 88,9231)
φω = 3,5 = - 126,88º
De allí que el MF sea
MF = 53,11º
9.3 COMPENSACIÓN ATRASO- ADELANTO
Un compensador atraso – adelanto se utiliza cuando no es posible cumplir los
requerimientos con un compensador simple. Su función de transferencia es la siguiente:
1 ,1
T 1s
T1s
T1s
T1s
Kc )s(Gc
2
2
1
1 ≤α>β
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
β+
+
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
α+
+=
El primer término produce el efecto de una red de adelanto, y el segundo término produce
el efecto de una red de atraso.
⎟⎟⎠
⎞⎜⎜⎝
⎛+α
+α=
α+
+
1sT1sT
T1s
T1s
1
1
1
1 ⇒ Adelanto ⎟⎟⎠
⎞⎜⎜⎝
⎛+β
+β=
β+
+
1s T 1s T
T1s
T1s
2
2
2
2 ⇒ Atraso
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 60

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
Im
agin
ary
Axi
s
-1 -0.5 0 0.5 1 1.5 2 2.5-1.5
-1
-0.5
0
0.5
1
1.5
ω0
ω = ∞
ω = 0
FIGURA 9.9 DIAGRAMA POLAR PARA COMPENSADOR ATRASO
Es muy común seleccionar 1/α = β cuando se
diseña un compensador atraso–adelanto, pero
no es obligatorio. La traza polar para Kc = 1 y
1/α = β es la que se muestra en la figura 9.9.
Para 0 < ω < ωo el compensador funciona como
un atraso y para ωo < ω < ∞ funciona como un
adelanto.
21o T T
1=ω se obtiene cuando φ = 0º
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 61
El diagrama de Bode para un compensador atraso – adelanto donde Kc = 1 y 1/α = β = 10
se muestra en la figura 9.10
Frequency (rad/sec)
Bode Diagrams
- 10 - 8 - 6 - 4 - 2 0
10 - 3 10 -2 10 -1 10 0 10 1 10 2 - 40
- 20
0
20
40
ω o
1/T2 1/βT2 1/T1 β/T1
20lg | G C |
φ
Fig. 9.10 Diagrama de Bode para un Compensador Atraso-Adelanto
La intención es utilizar el atraso para mover la frecuencia de corte hacia lugares de
frecuencia más favorables para el cálculo del MF y luego añadir el adelanto para agregar la
fase necesaria.
A continuación se mostrará el procedimiento de diseño para este compensador en el caso
que α = 1/β.

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
9.3.1 PROCEDIMIENTO DE DISEÑO
1) Se ajusta la ganancia para satisfacer los requerimientos de error.
2) Se dibuja, para dicha ganancia, el Diagrama de Bode no compensado. Se verifican los
valores de MF y MG
3) Se selecciona la frecuencia de cruce de ganancia (ωc nueva). Dicha selección se realiza
escogiendo una ωc nueva a la cual la fase es más favorable.
4) Se selecciona el cero de la red de atraso una década por debajo del valor anterior, es
decir, 10T
1 nuevac
2
ω=
5) Se estima el valor de la fase a adelantar para esa frecuencia de corte, de igual forma
que se realiza para el adelanto puro
φm = MF requerido – MF Intermedio (ωc I) + ∆φ
6) Dado φm , se calcula α y con ello β
α+α
=φα
=β1
-1sen y 1m
7) A partir de allí, se tiene la red de atraso completa y en adelante el procedimiento es
completamente gráfico.
8) Se dibuja la red de atraso y se ubica la red de adelanto, tal que, en el punto de nueva
frecuencia de corte atenúe la curva de amplitud lo necesario para que llegue a 0 db. Por lo
tanto se traza una recta de –20 db/dc que a ωC nueva que tenga la misma magnitud (pero
negativa) que 20 log |G| a esa frecuencia.
9) Donde dicha recta corte la recta de pendiente 0 db/dc, que proviene de la red de atraso,
se encuentra el cero (1/T1) y donde corte a 0 db se encuentra el polo (1/αT1).
EJEMPLO 9.3.2: (ATRASO – ADELANTO)
Para un sistema cuyo ( )( )4s1ssK)s(GH
++= diseñe un compensador tal que Kv = 10 , MF
= 50 y MG ≥ 10 db.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 62

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
SOLUCIÓN
1) Se calcula la ganancia que satisface el requerimiento de error
104K H(s) G(s) slimK
0SV ===
→
Por lo tanto K debe ser 40.
2) Se realiza el diagrama de Bode para esa ganancia (figura 9.11)
Frequency (rad/sec)
Pha
se (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-80
-60-40
-200
2040
60
10-2 10-1 100 101 102-270
-240
-210
-180
-150
-120
-90
FIG. 9.11 DIAGRAMA DE BODE PARA ( )( )4s1ss
40)s(GH
++=
A partir de dicho diagrama se aprecia que el sistema tiene un margen de fase negativo, lo
que implica que es INESTABLE. No puede ser compensado por adelanto ni por atraso
puros, por lo que se diseña un compensador atraso – adelanto.
3) Se atrasará para obtener una frecuencia de transición intermedia ωC Intermedia = 2. Este
valor de frecuencia de transición intermedia implicaría un MF Intermedio igual a 0º (Esta
escogencia No es Obligatoria)
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 63

IX. DISEÑO DE COMPENSADORES UTILIZANDO LA RESPUESTA FRECUENCIAL DEL SISTEMA
ONTROL DE ROCESOS PS-2320 C P II
4) Se selecciona el cero de la red de atraso una década por debajo del valor anterior de ωC ,
es decir, 1/T2 = 0,2.
5) Se estima el valor φm a adelantar como:
φm = 50º - 0º + 5º
6) Dado φm , se calcula β como :
β+β−
=φ1111Sen m se obtiene β = 10, para el cual φm = 54,9º
7) Al estar completamente definida la red de atraso se obtiene la red de adelanto en forma
gráfica: ⎟⎠⎞
⎜⎝⎛
++
=++
=
β+
+
1s501s510
02,0s2,0s
T 1s
T1s
2
2 (red de atraso)
8) Se dibuja la red de atraso y si la escala de frecuencias no lo permite, lo único necesario
es dibujar la recta de pendiente 0 db/dec a una amplitud logarítmica igual a – 20 log β
9) Para determinar el adelanto, se dibuja en ω = 2 una recta de 20 db/dc que anule el 20
log |G| y lo lleve a 0 db. A partir de alli se obtiene 1/T1 = 0,5 y β/T1 = 5
Red de adelanto ⎟⎠
⎞⎜⎝
⎛+
+=
++
1s2,01s2
101
5s5,0s
10) Se verifica
( )( )( )( ) 769,0
3852,50001,20616,201,2
)4721,4)(2361,2(240 Gc H G
2=⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛==ω
¡Está un poco lejos de 1, pero lo dejaremos así!
20 log ⏐G H Gc⏐ω =2 = - 2,27 db
2Gc 26,56º90º-63,4º- H G2 =ω+−=
=ω
º8014,21º4271,89º9638,75º2894,8426,56º- 90º-63,4º- Gc H G2
−−++==ω
º49M º9353,130Gc H G F2=−=
=ω
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 64

X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL
A continuación se evaluará el efecto que tiene introducir un controlador sobre la respuesta
frecuencial de un sistema, los controladores a analizar son:
Proporcional (P),
Proporcional derivativo (PD),
Proporcional integral (PI) y,
Proporcional integral derivativo (PID)
10.1 CONTROLADOR PROPORCIONAL (P)
Un controlador proporcional tiene una Función de Transferencia de la siguiente forma:
pc K)s(G =
donde KP se conoce como la ganancia proporcional y tiene su efecto solamente en la curva
de amplitud logarítmica sin alteración alguna de la fase. Debido a su sencillez, su
efectividad se limita a desplazar la curva de ganancia logarítmica un valor igual a 20 log
Kp. Más específicamente, en la Figura 10.1 se muestra el diagrama de Bode de un sistema
cuya función de transferencia es ( )( )1s101ss1)s(G
++= y en la Figura 10.2 se le añade un
controlador proporcional con una ganancia Kp = 10
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-100 -50
0 50
100 Gm=0.82785 dB (at 0.31623 rad/sec), Pm=1.5763 deg. (at 0.30145 rad/sec)
10 -3 10 -2 10 -1 10 0 101-300 -250 -200 -150 -100 -50
Fig. 10.1 Diagrama de Bode sin Controlador
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (
dB)
Bode Diagrams
-100
-50
0
50
100
10-3 10-2 10 -1 10 0 101-300
-250
-200
-150
-100
-50
Fig. 10.2 Diagrama de Bode con Controlador
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 65

X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
Se puede concluir que al introducir dicho controlador se tienen las siguientes
consecuencias:
mejoró el error a la rampa en estado estable,
sin controlador 1ess =
501ess = con controlador
•
Mejoró también la rapidez de la respuesta, lo cual se aprecia en el aumento del ancho
de banda
•
• Pero, todas estas mejorías son a expensas de la estabilidad relativa, pues el MF y MG
disminuyeron.
Concluyendo, la introducción de un controlador proporcional tiene influencia sobre las
respuestas transitoria y permanente, pero limitada.
10.2 CONTROLADOR PROPORCIONAL DERIVATIVO (PD)
En este caso la Función de Transferencia del controlador es
⎟⎟⎠
⎞⎜⎜⎝
⎛+=+= s
KK
1KsKK)s(Gp
DpDpc ; ωο = Kp/KD (frecuencia de ocurrencia del cero)
En la Figura 10.3 se observa el Diagrama de Bode del controlador PD (KP = 1, KD = 0,5),
donde se puede visualizar su efecto sobre la respuesta frecuencial. La característica de la
curva de magnitud trasladará la frecuencia de corte a un valor más alto, por lo tanto, el
principio de diseño radica en localizar la frecuencia de corte del controlador, ωο = Kp/KD,
tal que se logre un mejoramiento efectivo del margen de fase en la nueva frecuencia de
transición de ganancia del sistema.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 66
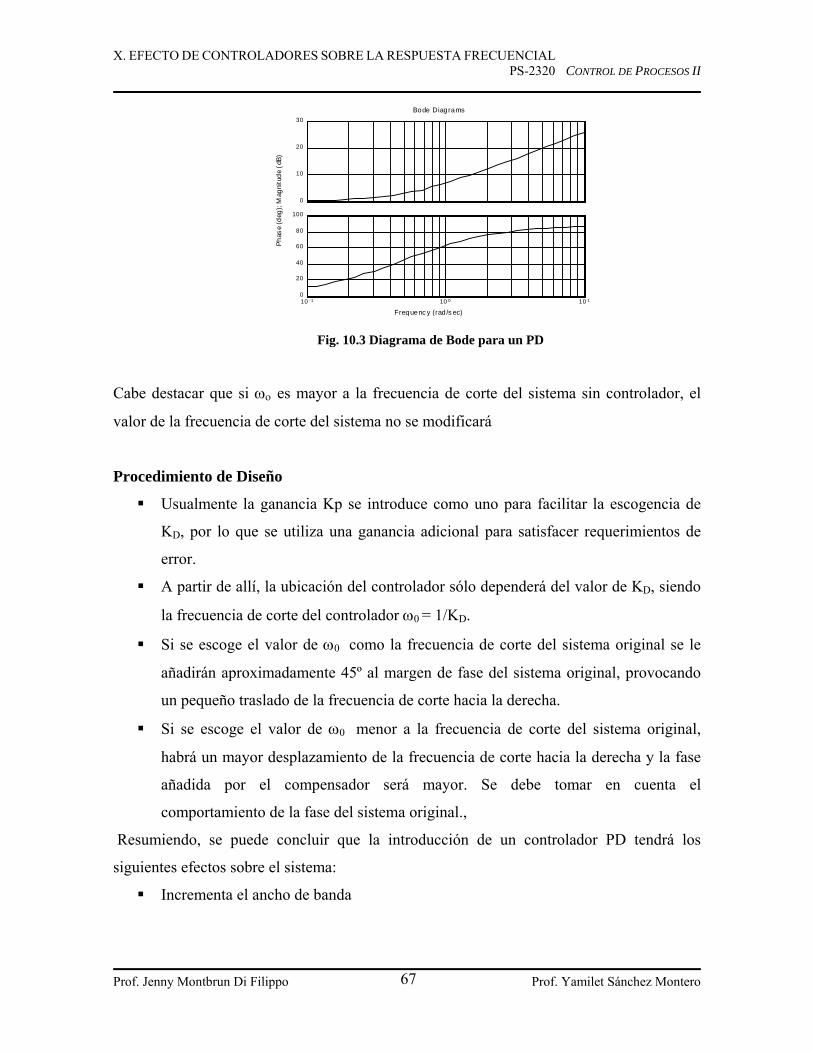
X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
Frequenc y (rad/s ec)
Phas
e (d
eg);
Mag
nitu
de (
dB)
Bode Diagrams
0 10 20 30
10 -1 10 0 10 1 0 20 40 60 80
100
Fig. 10.3 Diagrama de Bode para un PD
Cabe destacar que si ωο es mayor a la frecuencia de corte del sistema sin controlador, el
valor de la frecuencia de corte del sistema no se modificará
Procedimiento de Diseño
Usualmente la ganancia Kp se introduce como uno para facilitar la escogencia de
KD, por lo que se utiliza una ganancia adicional para satisfacer requerimientos de
error.
A partir de allí, la ubicación del controlador sólo dependerá del valor de KD, siendo
la frecuencia de corte del controlador ω0 = 1/KD.
Si se escoge el valor de ω0 como la frecuencia de corte del sistema original se le
añadirán aproximadamente 45º al margen de fase del sistema original, provocando
un pequeño traslado de la frecuencia de corte hacia la derecha.
Si se escoge el valor de ω0 menor a la frecuencia de corte del sistema original,
habrá un mayor desplazamiento de la frecuencia de corte hacia la derecha y la fase
añadida por el compensador será mayor. Se debe tomar en cuenta el
comportamiento de la fase del sistema original.,
Resumiendo, se puede concluir que la introducción de un controlador PD tendrá los
siguientes efectos sobre el sistema:
Incrementa el ancho de banda
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 67

X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
Mejora la rapidez de la respuesta transitoria
Mejora el margen de ganancia y el margen de fase
Puede acentuar el ruido a alta frecuencia
No es efectivo para sistemas inestables
10.3 CONTROLADOR PROPORCIONAL INTEGRAL (PI)
En este caso la Función de Transferencia del controlador es
⎟⎟⎠
⎞⎜⎜⎝
⎛ +=+=
ssK/K
Ks
KK)s(G Ip
II
pc
En la Figura 3 se observa el Diagrama de Bode del controlador PI (Kp = 0,1, KI = 5), donde
se puede visualizar el posible efecto que tendría sobre la respuesta frecuencial. Observe que
la magnitud de Gc(s), cuando la frecuencia tiende a infinito es 20 log Kp (db), lo cual
representa una atenuación si Kp es menor que uno. Esta atenuación es utilizada para
mejorar la estabilidad del sistema. En cuánto a la fase ésta es siempre negativa, lo cual
perjudica la estabilidad, por lo que se debe colocar la frecuencia de corte del controlador,
(ω = KI / Kp), tan lejos como el requisito de ancho de banda lo permita.
Pha
se (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
Frequency (rad/sec)
-20 -10
0 10 20
10 0 101 102 103-100 -80 -60 -40 -20
0
Fig. 10.4 Diagrama de Bode para un PI
Procedimiento de Diseño
Se ajusta el valor de la ganancia para satisfacer el error
Se Ubica la frecuencia de corte nueva (ωc)donde la fase satisfaga el margen de fase
requerido más el ∆φ.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 68

X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
Se ubica el cero una década por debajo de la nueva frecuencia de corte
10ω
KK c
P
I =
Se calcula KP considerando la atenuación necesaria para que se logre la nueva
frecuencia de corte
cwP G20lg20logK =
Con base a lo anterior se puede concluir que un controlador Proporcional Integral tiene las
siguientes ventajas y desventajas:
• Mejora el MF y el MG
• Filtra el ruido a alta frecuencia
• Disminuye el ancho de banda
10.4 CONTROLADOR PROPORCIONAL INTEGRAL DERIVATIVO (PID)
En este caso la Función de Transferencia del controlador es como se muestra a
continuación:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ++=++=
sKsKsK
sK
sKK)s(G Ip2
DIDpc
En la Figura 4 se observa el Diagrama de Bode de un controlador PID, donde se puede
visualizar su efecto sobre la respuesta frecuencial.
Pha
se (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
Frequency (rad/sec)
20 30 40 50 60 70
10 -2 10-1 100 101 102-100 -50
0 50
100
Fig. 10.5 Diagrama de Bode para un PID
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 69

X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
Los valores de los parámetros deben ser seleccionados de forma tal que la zona donde se le
añade fase negativa quede a baja frecuencia para que no altere la estabilidad del sistema y
la zona donde se añade fase positiva debe ser colocada alrededor de la frecuencia de cruce
del sistema. Además, se debe considerar que la parte integral añade un polo en el origen por
lo que el error del sistema se ve apreciablemente beneficiado a expensas de la estabilidad
relativa del sistema, la cual se mejora gracias a la parte derivativa del controlador.
A partir de lo anterior se pueden tener las siguientes conclusiones generales respecto al
efecto de añadir un PID:
Aumenta el tipo del sistema
Mejora el error
Mejora la estabilidad
Reduce ligeramente el ancho de banda
El procedimiento de diseño se puede realizar igual que en el caso de atraso – adelanto.
Primero se diseña el PI y luego se le añade la parte derivativa para lograr el margen de fase
deseado.
EJEMPLO
Para un sistema cuya Función de Transferencia a Lazo Abierto y diagrama de Bode se
muestran a continuación, se dispone de controladores P, PD, PI y PID, para lograr un MF
sea mayor a 50º y un error al escalón sea menor o igual a 0,1.
)2)·(1·(4)(
++=
ssssG
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 70

X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
Frequency
Phas
e (d
eg);
Mag
nitu
de (d
B)
Bode
-40 -30 -20 -10
0 10 20 30 40
10 -2 10-1 100 10 1 -270 -250 -230 -210 -190 -170 -150 -130 -110 -90
Fig. 10.6 Diagrama de Bode a lazo Abierto
SOLUCIÓN
De la Figura 10.6 se puede observar que el sistema es de tipo uno, por lo que no presenta
error al escalón, es decir, la solicitud de cuánto a respuesta permanente se cumple.
En cuánto al margen de fase, se puede leer un valor de aproximadamente 12º, por lo que
dicha restricción no se cumple.
A continuación se analizan los diferentes controladores para escoger el que será utilizado.
Proporcional. •
La única manera de lograr un margen de fase como el requerido, sería añadiendo una
ganancia menor a uno tal que la frecuencia de cruce se traslade a la izquierda, donde la fase
presenta mejores valores. El problema sería que el sistema a lazo cerrado tendría un menor
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 71

X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
ancho de banda y por tanto, reduciría la rapidez de la respuesta.
20 lg Kp = -10 dB ⇒ Kp = 0.3206
Proporcional Integral. •
•
Este tipo de controlador logra su objetivo provocando atenuación a alta frecuencia, lo que
trasladaría la frecuencia de corte a la izquierda, igual que el control proporcional,
desmejorando la respuesta transitoria. Pero al no formar parte de las restricciones se hace
posible diseñar este tipo de controlador. Adicionalmente introduciría un polo más en el
origen, con lo que el error a la rampa también sería cero, pero esto no forma parte de las
restricciones. Esto descarta la introducción de este tipo de controlador, con el cual se
lograría lo mismo que con el proporcional, pero la respuesta transitoria se vería más
afectada.
Proporcional Derivativo.
Este controlador logra su objetivo aumentando la fase y trasladando la frecuencia de corte a
la derecha, lo que implica mejora en respuesta transitoria. El procedimiento de diseño se
presenta a continuación:
• Se escoge una ganancia proporcional unitaria, pues no hay problemas con el error.
• La fase necesaria a añadir es:
Φañadir = MFrequerido – MForiginal = 50º -17º = 33º
• Si se coloca el controlador con ω0 = 1/KD, igual a: ωCoriginal, se le añadirán 45º al
margen de fase,
ωCoriginal ≅ 1,1 => 1/TD = 1,1
s1,1
11)s(G C +=
• Se verifica el valor de la nueva frecuencia de corte, se toma una ω > 1,1 pues ωC se
trasladará un poco a la derecha.
35,1)33,2)·(56,1)·(2,1(
)48,1·(4·2,1
===ωCGG
Esto implica que ωC, está aún más a la derecha.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 72
X. EFECTO DE CONTROLADORES SOBRE LA RESPUESTA FRECUENCIAL PS-2320 CONTROL DE PROCESOS II
00,1)5,2)·(8027,1)·(5,1(
)69,1·(4·5,1
===ωCGG
Φ = 53,74º - (90º +56,30º +36,86º) = -129,42º
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 73
MF = 50,58º
Considere el mismo problema anterior pero al cual se le añade como solicitud un el error a
la rampa sea cero. En este caso, se debe aumentar el tipo del sistema lo que implica que la
opción a escoger como controlador sería un proporcional integral, el cual se diseña a
continuación.
• El error queda satisfecho al introducir un nuevo polo en el origen, así quue solo nos
preocupamos de satisfacer el margen de fase.
• Se escoge una ωCnueva ≅ 0,4 donde la fase es aproximadamente -125
Φ = -125º => MF ≥ 55º = MFrequerido + ∆Φ
• Se evalúa la amplitud de G(s) a esa frecuencia, para conocer el valor en decibeles a
atenuar por el controlador.
20·log|G|ωCnueva ≅ 13dB => |G| = 4,5 => KP = 0,2
• Se fija el cero del controlador una década por debajo de la nueva frecuencia de
corte, de donde se calcula el valor de KI
Como ωCnueva = 0,4; => KI/KP = 0,04
=> KI = 0,0088
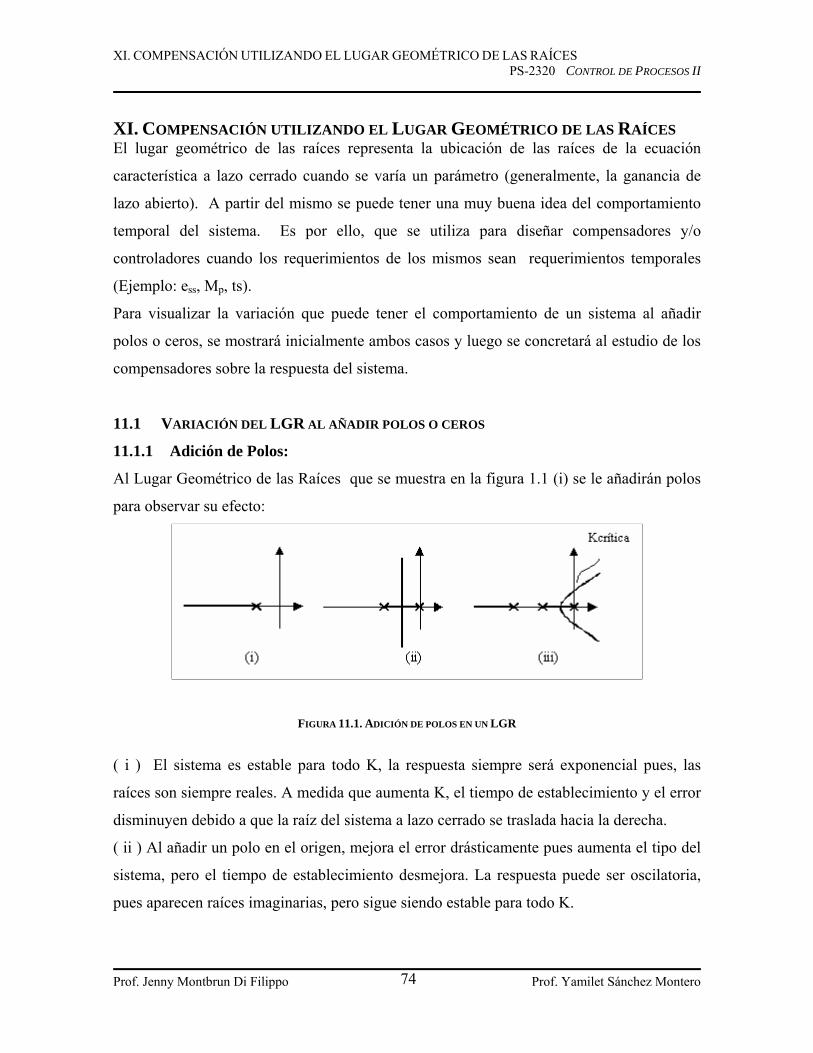
XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES El lugar geométrico de las raíces representa la ubicación de las raíces de la ecuación
característica a lazo cerrado cuando se varía un parámetro (generalmente, la ganancia de
lazo abierto). A partir del mismo se puede tener una muy buena idea del comportamiento
temporal del sistema. Es por ello, que se utiliza para diseñar compensadores y/o
controladores cuando los requerimientos de los mismos sean requerimientos temporales
(Ejemplo: ess, Mp, ts).
Para visualizar la variación que puede tener el comportamiento de un sistema al añadir
polos o ceros, se mostrará inicialmente ambos casos y luego se concretará al estudio de los
compensadores sobre la respuesta del sistema.
11.1 VARIACIÓN DEL LGR AL AÑADIR POLOS O CEROS
11.1.1 Adición de Polos:
Al Lugar Geométrico de las Raíces que se muestra en la figura 1.1 (i) se le añadirán polos
para observar su efecto:
FIGURA 11.1. ADICIÓN DE POLOS EN UN LGR
( i ) El sistema es estable para todo K, la respuesta siempre será exponencial pues, las
raíces son siempre reales. A medida que aumenta K, el tiempo de establecimiento y el error
disminuyen debido a que la raíz del sistema a lazo cerrado se traslada hacia la derecha.
( ii ) Al añadir un polo en el origen, mejora el error drásticamente pues aumenta el tipo del
sistema, pero el tiempo de establecimiento desmejora. La respuesta puede ser oscilatoria,
pues aparecen raíces imaginarias, pero sigue siendo estable para todo K.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 74

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
( iii ) Al añadir otro polo, mejora aun más la respuesta permanente pero, desmejora la
respuesta transitoria y se ve afectada la estabilidad, pues ahora existe un valor límite de la
ganancia.
11.1.2. Adición de Ceros:
Para analizar el efecto de añadir ceros se partirá del LGR mostrado en la figura 1.1 (iii)
(i) (ii)
FIGURA 11.2. ADICIÓN DE CEROS EN UN LGR
( i ) Al añadir un cero al sistema de la figura (iii), este pasa a ser estable para todo K y
mejora la respuesta transitoria.
( ii ) Al añadir otro cero, la variación del LGR muestra que los polos dominantes del
sistema se trasladan hacia la izquierda, lo que implica una mejora en respuesta transitoria.
Dependiendo de la ubicación de los ceros, el tiempo de establecimiento variará.
Se puede observar que, al añadir polos o ceros en el lazo directo se logra modificar el
Lugar Geométrico de las Raíces (LGR), lo que se traduce a una modificación en la
respuesta temporal a lazo cerrado.
Además, se puede concluir que la adición de polos en el origen mejora la respuesta
permanente, desmejorando la respuesta transitoria, en cambio, la adición de ceros mejora la
transitoria. A continuación se procederá a mostrar los procedimientos de diseño para añadir
distintos tipos de compensadores adelanto, atraso y adelanto - atraso
11.2 COMPENSACIÓN EN ADELANTO:
La función de transferencia del compensador es igual a la estudiada anteriormente para el
caso frecuencial, donde 0,07 < α < 1, por lo que el máximo ángulo que proporcionará el
adelanto será de 60º.
Kc1Ts
1Ts)s(Gc ⎥⎦⎤
⎢⎣⎡
+α+
α=
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 75

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
El cero ocurre en s = -1/τ, y el polo en s = -1/ατ, tal como se muestra en la figura 11.3, a
partir de alli se observa que el valor del ángulo del cero es γ y el ángulo del polo es β, por
lo que, al añadir el compensador en adelanto, la condición de ángulo se verá modificada en
un valor igual a φ = γ - α, tal como se observa en la figura 11.3. Debido a ésto, este tipo de
compensador se utiliza cuando es necesario modificar el L.G.R. para mejorar la respuesta
transitoria del sistema a lazo cerrado.
Polo deseadoαz > αp αz - αp = φ
αp αz
−1/ατ −1/τ φ : ángulo proporcionado por adelanto
FIGURA 11.3 CERO Y POLO DEL ADELANTO
11.2.1 PROCEDIMIENTO DE DISEÑO 1) A partir de las especificaciones que debe cumplir el sistema a lazo cerrado, se
determina la localización de los polos dominantes deseados (P.D.D)
2) Se traza el lugar geométrico de las raíces del sistema no compensado y se verifica si los
polos dominantes deseados pertenecen al LGR. Si no se dispone del LGR se verifica
utilizando la condición de ángulo.
3) Para introducir la red de adelanto se pueden utilizar dos procedimientos:
a) Se calcula el ángulo necesario para que los polos dominantes deseados pertenezcan
al LGR. (φ). Se ubica el cero del compensador abajo del polo dominante deseado.
(Ver figura 11.4)
FIGURA 1.4. PRIMER MÉTODO GRÁFICO PARA EL ADELANTO
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 76

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
Se ubica el polo de forma tal que se satisfaga la condición de ángulo αz - αp = φ
b) Se traza una horizontal que pase por el polo dominante deseado y una recta que una
el origen con el polo dominante deseado ( figura 1.5). Se traza la bisectriz y de allí
se trazan dos rectas a φ / 2 de cada lado, lo que ubica el polo y el cero del adelanto.
φ/2
Bisectriz
φ/2
Z P
Z... Cero del Adelanto
P... Polo del Adelanto
FIGURA 11.5 SEGUNDO MÉTODO GRÁFICO PARA EL ADELANTO
4) Sea cual sea, el método de diseño, se debe calcular por condición de Módulo la
ganancia tal que, los polos dominantes deseados sean la solución de la ecuación
característica.
EJEMPLO 11.2.2 Para un sistema como el siguiente:
FIGURA 11.6 ESQUEMA DE CONTROL
Diseñe un compensador tal que, los polos dominantes deseados sean j323s ±−=
SOLUCIÓN: 1) Se verifica si los PDD pertenecen al lugar geométrico de las raíces Como la función de
transferencia a lazo abierto es muy sencilla, es fácil dibujar el LGR tal como se muestra en
la figura 11.7. Gráficamente se observa que el polo dominante deseado no pertenece al
LGR.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 77

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
32
Polo dominante
-3
α β
FIGURA 11.7 LUGAR GEOMÉTRICO DE LAS RAÍCES PARA EL EJEMPLO 11.2.2
2) Se debe calcular numéricamente el valor de φ a añadir utilizando la condición de
ángulo. Para ello se calcula el ángulo de ( )1s5,0s5)s(G
+= para s = PDD
∑−∑= poloscerosGPDD
= 0 – (α + β)
( ) ( )1)j323(5,0j323GPDD
++−⋅−+−−=
PDDG = -130,89° - 106,11° = - 237° ≠ - 180°
Por ello se debe añadir φ = 57°, para satisfacer la condición de ángulo. 3) Utilizando el primer procedimiento se añade el cero en s = - 3, y se obtiene
numéricamente el valor del ángulo del polo tal como se muestra continuación (figura 11.8).
3,464
90º
X -3
αp
FIGURA 11.8 EJEMPLO 11.2.2
φ = αz - αp = 57º
αp = αz - φ = 33º
tg 60º = 3,464/ x → x = 5,3333
Por lo tanto el cero estará en s = - 3 y el polo en s = - 8,33333 4) Finalmente, la ganancia para que ese punto sea el polo dominante deseado se calcula
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 78

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
utilizando la condición de módulo:
( )( ) ( ) 1
1s5,0s5
33,8s3sK
PDD
=++
+
K = 3,0333
De allí, que el compensador a añadir tendrá la siguiente función de transferencia.
( )( )333,8s
3s0333,3Gc+
+=
11.3 COMPENSACIÓN EN ATRASO Para un sistema que tiene buenas características de respuesta transitoria pero no satisface
los requerimientos en respuesta permanente se utiliza la compensación en atraso.
Esencialmente, un compensador en atraso aumenta la ganancia de lazo cerrado sin
modificar apreciablemente el lugar geométrico de las raíces. Para ello, se colocan el cero y
el polo de la red de atraso cerca del origen la cual tiene la siguiente función de
transferencia:
( )T1s
T1sK1Ts
1Ts KsG CCC β++
=+β
+β=
El cero y el polo del atraso se colocan muy cerca del origen, por lo que la red de atraso no
tendrá prácticamente ningún efecto sobre la condición de módulo y la condición de ángulo,
es decir,
( ) 1T1s
T1sK sGPDD
PDD CC ≈β+
+= (Kc = 1)
( )PDD
sGC < 5°
Por lo tanto, si la función de transferencia de lazo directo, evaluada para PDD, satisface la
condición de ángulo y la condición de módulo, al añadirle Gc(s), éste no se verá afectado.
De allí que sólo queda verificar que la nueva función de transferencia a lazo directo GH(s)
Gc(s), tendrá una variación en el error igual a β
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 79

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
( ) ( )sGH1Ts
1TssGH )s(Gc +β+
β=
Así se comprueba que la ganancia de lazo directo se verá modificada en un valor igual a β,
lo que aumenta el coeficiente de error en el mismo factor β.
PROCEDIMIENTO DE DISEÑO
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 80
1) Verificar que los polos dominantes deseados pertenezcan al lugar geométrico de las
raíces.
2) Calcular el valor de β necesario para satisfacer coeficientes de error
β=β
=T1
T1K
K
compensado no
requerido
3) Se ubica el cero cerca del origen y con el valor de β se calcula la posición del polo.
4) La contribución del ángulo no debe ser mayor de 5º
5) Se verifica la condición de módulo y de ángulo para garantizar que el polo dominante
deseado pertenezca al lugar geométrico de las raíces después de incluir el compensador.
6) Se verifica que se satisfaga el error.
EJEMPLO 11.3.1
Para el siguiente sistema, se desea que los polos dominantes deseados sean j322s ±−= y
se satisfaga un Kv = 20
FIG. 11.9 ESQUEMA DEL SISTEMA
1) Se verifica que los polos dominantes deseados pertenezcan al LGR. Ya que el LGR es
tan simple, por simple inspección, se observa que los PDD, sí pertenecen al lugar
geométrico de las raíces, se verifica también usando la condición de ángulo.

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
FIG. 11.9 LGR DEL SISTEMA
PDD = s1
j322s1 ±−=
j4641,32s1 ±−=
°−=°−°−=+−−= 18060120 )4s( s )s(GPDDPDDPDD
=PDD
)s(G 144
K=
×
Se calcula el Kv del sistema no compensado
44/16)s(GslimK0sv ==⋅=
→
Como no satisface, se debe añadir un atraso.
β=β
=T1
T1K
K
compensado no
requerido → β = (20 /4) = 5
Se escoge el cero en s = 0,05. Por lo que el polo estará en:
01,005,0s =β
=
01,0s05,0s)s(G C +
+=
Se comprueba PDDPDDc G(s)y )s(G
=PDDc )s(G 005,1
005,40252,4
=
=PDDc )s(G 120,6164 º - 120,1239 º = 0,4925 º
A partir de la función de transferencia de lazo directo final se verifica Kv:
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 81

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
( ) 20454ss
1601,0s05,0s)s(G)s(GslimK c
0sv =×=
+×⎟
⎠
⎞⎜⎝
⎛++
=⋅=→
11.4 COMPENSACIÓN ADELANTO –ATRASO Este compensador se añadirá cuando se necesite modificar las condiciones de la respuesta
transitoria y permanente. Su diseño puede ser realizado a partir del diseño separado de la
red de atraso y la red de adelanto, es decir, se diseña inicialmente la red de adelanto tal que
los polos dominantes deseados (PDD), pertenezcan al Lugar Geométrico de las Raíces y
luego a través del atraso se logra la ganancia deseada en lazo directo que satisfaga el error.
Para ilustrar el método se realiza el siguiente ejemplo.
Se desea que el sistema que se muestra en la figura 11.10, cumpla con los siguientes
requerimientos:
EJEMPLO 11.4.1 Se desea que el Kv = 20, ζ =0,5 y ts 2% = 2
Figura 11.10 Esquema de control del Ejemplo 11.9.1
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 82
1) Se ubican los PDD.
Si ξ = 0,5 → θ = 60° tg θ =ξ
ξ− 21
2w4ts
n%2 =
ξ=
PDD = s1 = - 2 + tg 60° x 2 = - 2 + 3,46j
2) Debido a que no se dispone del LGR exacto del sistema original, se verificará
numéricamente si los PDD pertenecen o no al LGR original.
PDDPDDPDDPDD )5s( )1s( s )s(G +−+−−=

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
°−=°−°−°−= 19,27507,4912,106120 )s(GPDD
El ángulo necesario para que el PDD pertenezca al lugar geométrico de las raíces será la
diferencia entre –275° y -180°
φ = 95°
Esto implica que es necesario introducir una red de adelanto que satisfaga dicha condición
de ángulo. Como el φmax = 60°, se deben añadir dos compensadores por adelanto.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 83
3) Se utiliza el segundo método para ubicar el cero y el polo del adelanto, (Figura 11.11)
60º
Bisectriz
γ
αp
x y
Figura 11.11 Diseño del compensador por adelanto
ADELANTO DOBLE
φ = 47,5° → φ/ 2 = 23,75° Se observa que γ = 30º - 23,75° = 6,25° → αz = 90º - γ = 83,75°
tg � = 3,46/ x → x = 0,3789
La ubicación del cero del adelanto está en s = - 2,3789
Para ubicar el polo volvemos al gráfico de la figura 11.11
αz + 90° +(30° + �/2) = 180°
αz = 36,25° → tg αz = 3,46/y → y= 4,7188
La ubicación del polo será: en s = - 6,7188

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
2
AdAd 72,6s38,2sKG ⎟
⎠
⎞⎜⎝
⎛++
=
=PDDAd )s(G 2 (83,73) – 2(36,24) = 94,97°
de allí que se añade el ángulo necesario.
Se calcula KAd para que se satisfaga la condición de módulo:
1)s(G )s(GPDDAd =
( )( )( )
( )1
72,6s38,2sK
5s1ss1
2
2Ad =
+
+++
( )( )
185,5
48,3K)58,4)(60,3)(99,3(
12
2Ad = → KAd = 186,37
( )( )( )( )2
2
Ad 72,6s5s1s s38,2s 37,186)s(G )s(G
++++
=
Teniendo completa la función de transferencia de lazo directo se calcula Kv
===→
Gc(s) G(s) slimK0sV 4,68 → NO SATISFACE LA CONDICIÓN DE ERROR !!!
SE UTILIZA UN ATRASO!!
β = original
requerida
K
K → β =
68,420 → β = 4,27 sirve con un atraso simple.
Cero en s = 0,05 Polo en s = 0,0117
Se verifica ⏐Gc(s)At⏐ y )s(Gc At
9953,09906,39717,3
0117,0s05,0sG
PDDPDDAt ==
++
= → OK!!!
PDDPDDPDDAt )0117,0s( )05,0s( )s(Gc +−+=
°−=°−°= 47,0884,1194049,119 )s(GcPDDAt → ∆φ = - 0,47° (< 5°) OK!!
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 84

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
( ) ( )( )( )( ) ( )0117,0s72,6s5s1s s
05,0s38,2s 186)s(Gc)s(Gc)s(G 2
2
AtAd++++
++=
( ) ( )( )( ) ( )0117,072,65
05,038,2 186Kv2
2final = = 19,94 → Satisface Kv !!!
11.5. Diseño de Controladores usando el Lugar Geométrico de las Raíces Los controladores también pueden ser diseñados utilizando el Lugar Geométrico de las
Raíces, a partir del cual es posible determinar los parámetros de cada controlador tal que
satisfagan los requerimientos establecidos.
Los controladores a estudiar serán los siguientes:
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 85
• Proporcional ( P )
• Proporcional Derivativo ( PD )
• Proporcional Integral ( PI )
• Proporcional Integral Derivativo ( PID )
11.5.1 PROPORCIONAL ( P )
Gc(s) = Kp
Ajustar el valor de la ganancia K en un controlador proporcional será como moverse en
el LGR hasta lograr la respuesta deseada, tanto transitoria como permanente. Con ello se
logra modificar tanto la respuesta transitoria como la respuesta permanente, pero en forma
limitada.
11.5.2 PROPORCIONAL DERIVATIVO ( PD )
La función transferencia del controlador puede ser escrita como:
( ) ( ) ⎥⎦⎤
⎢⎣⎡ +⋅=+=
ddpdp T
1s TKsT1KsGc
Consiste en ubicar un cero en 1/Td y el valor de Kp tal que se satisfagan los
requerimientos.
11.5.3 PROPORCIONAL INTEGRAL ( PI )
( ) ⎥⎦⎤
⎢⎣⎡ +
=⎥⎦
⎤⎢⎣
⎡ +=⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
ssT1
KsT
sT1K
sT11KsGc i
pi
ip
ip

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
Consiste en ubicar un polo en el origen y un cero en s = - 1/ Ti tal que se logre el
objetivo deseado, además de fijar Kp.
11.5.4 PROPORCIONAL INTEGRAL DERIVATIVO ( PID )
⎥⎦
⎤⎢⎣
⎡ ++=⎟⎟
⎠
⎞⎜⎜⎝
⎛++=
i
di2
idp sT
1TTssTiK
sT1sT1KGc
Consiste en ubicar dos ceros y un polo en el origen tal que se satisfagan los
requerimientos.
A continuación se mostrarán diferentes ejemplos para ilustrar los procedimientos de cada
caso.
EJEMPLO 11.5.1
Para un sistema cuya FTLA es ( )( )3s1ss1G
++= se necesita que el sistema a lazo cerrado
satisfaga los siguientes requerimientos:
- Error al escalón unitario menor que 0,1
- Polos dominantes s = -1 + 2j
LGR sistema original
FIGURA 11.12. LUGAR GEOMÉTRICO DE LAS RAÍCES PARA EL EJEMPLO 11.5.1
Claramente el polo dominante deseado no pertenece al LGR pero el error siempre
se satisface por ser un sistema de tipo 1.
DISEÑO:
1) Se utilizará un controlador PD para mejorar la respuesta transitoria.
( ) ⎟⎠⎞⎜
⎝⎛ +⋅=+= sT
1TKsT1KGcd
dpdp
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 86

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
El ángulo necesario a añadir será:
∠G⏐PDD = - ∠s⏐PDD - ∠(s+1)⏐PDD - ∠(s+3)⏐PDD
∠G⏐PDD = - 116,56° - 90° - 45° = - 251,56° El ángulo necesario a añadir con el cero será φ = 71,56°. (Ver figura 11.13)
FIGURA 11.13. ANGULO A AÑADIR UN CERO
tg φ = 2 /x → x = 0,667 Por lo tanto el cero estará en s = - 1,667.
Finalmente, se calcula la ganancia para que se satisfaga la condición de módulo.
1GGc =
( )( )( )( ) 1
3s1ss667,1sTK1 d =
+++⋅
( )( )( )( )( ) 1
8284,22236,21083,2TK d =
⋅ → K⋅Td = 5,9995
Como 1/ Td = 1,667 → K = 9,999 ≈ 10
EJEMPLO 11.10.2
Para un sistema, cuya función de transferencia es )5s)(1s(
1)s(G++
= , diseñe Gc ( P, PI,
PD, PID) tal que satisfaga los siguientes requerimientos: Kv = 20 ts 2% < 1 wd = 2
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 87

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
FIGURA 11.14. LUGAR GEOMÉTRICO DE LAS RAÍCES
A partir de los requerimientos de ts y de ωd se obtienen los PDD = - 4 + 2j 1) Se escoge un PID pues se necesita mejorar el error drásticamente y también la
transitoria
2) ( )( )s
bsasKGc ++=
Hay infinitas soluciones.
∠G⏐PDD = - ∠(s+1)⏐PDD - ∠(s+5)⏐PDD
∠G⏐PDD = - 146,3° -63,43° = -209,76°
⏐G⏐PDD = 3,605
Tal como se había dicho, el PDD no pertenece al LGR, se necesita un adelanto de φ = 30°
que se logrará con los ceros, considerando también el ángulo añadido por el polo en el
origen.
Para calcular el ángulo que deben añadir los ceros se realiza a partir del ángulo φ.
φ = 30° =PDDPDDPDDPDD
ceross)6s()4s( +−+−+−
º43,153º30ceros +=
Si se fija uno de los ceros en s = - 4 , entonces el otro se fija para satisfacer la condición de
ángulo descrita anteriormente.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 88

XI. COMPENSACIÓN UTILIZANDO EL LUGAR GEOMÉTRICO DE LAS RAÍCES PS-2320 CONTROL DE PROCESOS II
º43,93
º90ceros
=γ
γ+=
FIGURA 11.15. DETERMINACIÓN DEL CERO
γ = 93,43° tg(180-γ) = 2/ X → X =0,1199
El otro cero estará en s = -3, 88
( )( )s
88,3s4sKGc ++=
Para establecer el valor de K se hace por condición de modulo:
( )( )( )( )
( ) 14721,4
22K605,32361,2
1GGcPDD
==
K= 9,01
93,275
88,349GGsLimK c0s
v =⋅⋅
=⋅=→
→ Satisface la condición Kv >20
Si no se logra satisfacer Kv, se debe reubicar los ceros.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero 89
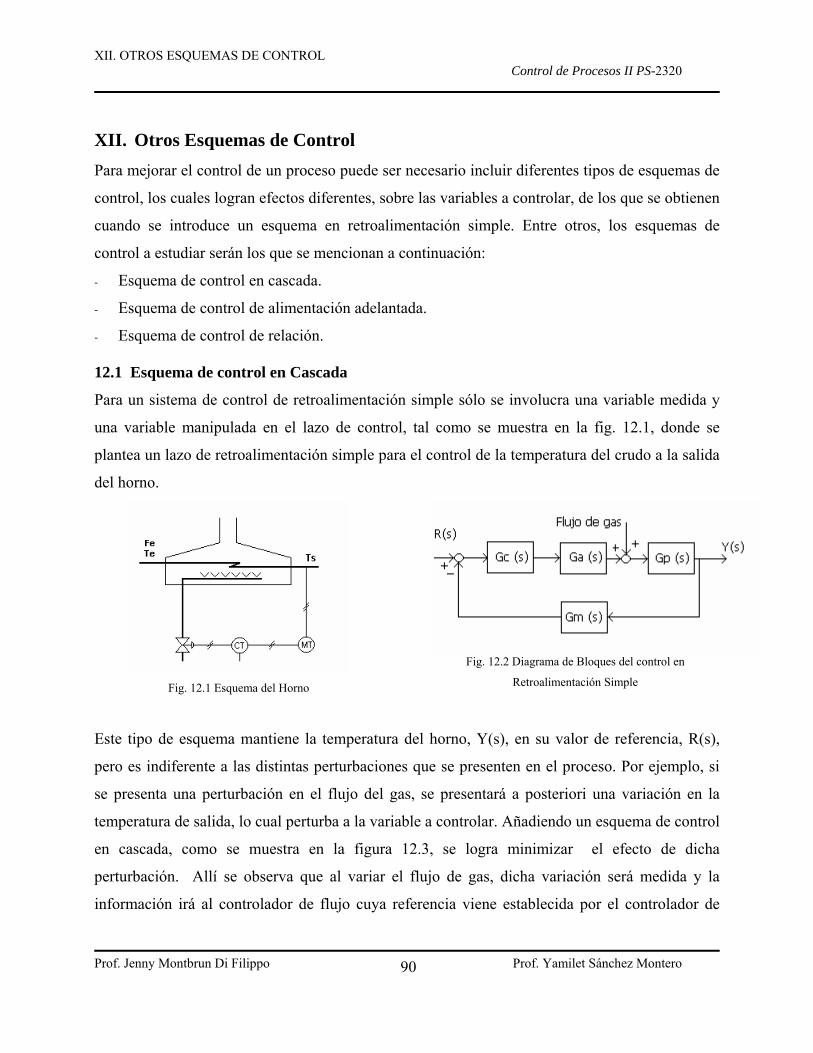
XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
XII. Otros Esquemas de Control Para mejorar el control de un proceso puede ser necesario incluir diferentes tipos de esquemas de
control, los cuales logran efectos diferentes, sobre las variables a controlar, de los que se obtienen
cuando se introduce un esquema en retroalimentación simple. Entre otros, los esquemas de
control a estudiar serán los que se mencionan a continuación:
- Esquema de control en cascada.
- Esquema de control de alimentación adelantada.
- Esquema de control de relación.
12.1 Esquema de control en Cascada
Para un sistema de control de retroalimentación simple sólo se involucra una variable medida y
una variable manipulada en el lazo de control, tal como se muestra en la fig. 12.1, donde se
plantea un lazo de retroalimentación simple para el control de la temperatura del crudo a la salida
del horno.
Fig. 12.1 Esquema del Horno
Fig. 12.2 Diagrama de Bloques del control en
Retroalimentación Simple
Este tipo de esquema mantiene la temperatura del horno, Y(s), en su valor de referencia, R(s),
pero es indiferente a las distintas perturbaciones que se presenten en el proceso. Por ejemplo, si
se presenta una perturbación en el flujo del gas, se presentará a posteriori una variación en la
temperatura de salida, lo cual perturba a la variable a controlar. Añadiendo un esquema de control
en cascada, como se muestra en la figura 12.3, se logra minimizar el efecto de dicha
perturbación. Allí se observa que al variar el flujo de gas, dicha variación será medida y la
información irá al controlador de flujo cuya referencia viene establecida por el controlador de
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
90

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
temperatura.
Fig. 12.3 Esquema del horno con un controlador en cascada
Otro ejemplo en el cual se puede añadir un esquema de control en cascada es un reactor con
reacción exotérmica, en el cual se busca mantener constante la temperatura T de la mezcla
(figura 12.4). En la camisa circula un refrigerante cuya temperatura TR se considera una
perturbación. La temperatura Ti también se considera una perturbación. La única variable
manipulada es el flujo de refrigerante FR.
Fig. 12.4 Reactor con reacción exotérmica
El diagrama de bloques de este esquema de control de retroalimentación simple es semejante al
que se muestra en la figura 12.2, donde r(s) será la temperatura del reactor T y R(s) será la
referencia de dicha temperatura.
En dicho lazo de retroalimentación se mide la temperatura T, se lleva al controlador, donde se
compara con la referencia y de allí se emite la acción de control que va a la válvula manipulando
FR. Este esquema de control no será muy efectivo si cambia TC, pues el esquema de control sólo
tomará una acción ante dicho cambio, cuando T se vea modificada.
Una forma de mejorar dicho esquema, es medir TC y tomar una acción de control antes de que el
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
91

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
cambio en TC tenga efecto sobre la temperatura T, si TR aumenta se debe aumentar FR y
viceversa (figura 12.5).
Este esquema de control en cascada, en el que se miden dos variables T y TC y se tienen dos lazos
con una sola variable manipulada (FR), se muestra en la figura 12.6.
Fig. 12.5 Esquema del reactor con control en cascada.
(a) El lazo de control que mide T (variable principal), usa como referencia el valor de T fijado
por el operador.
(b) El lazo de control que mide TC (variable secundaria), utiliza la salida del controlador primario
como referencia y es llamado el lazo esclavo.
Este tipo de esquema es muy común en procesos químicos. El diagrama de bloques del mismo
puede ser resumido como sigue:
+
V Proceso I
Medidor
+
-
Ref
+
Gp2
TR
Proceso II
Gp1
Ti
Medidor
Tc C-1 C-2
Lazo Secundario
Lazo Principal
Fig. 12. Diagrama de Bloques de un controlador en cascada
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
92

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
El proceso I (primario) tiene como salida a la variable principal a manipular y como entrada a la
perturbación en TR. El proceso II tiene como salida TR y como entrada FC.
Resumiendo, un esquema de control en cascada tiene como objetivo minimizar las perturbaciones
internas al lazo de retroalimentación simple. Además presenta una mayor rapidez de respuesta
ante dichas perturbaciones que un sistema de control con sólo retroalimentación simple.
12.1 ESQUEMA DE CONTROL EN ALIMENTACIÓN ADELANTADA (FEED- FORWARD). Un esquema de control en alimentación adelantada mide la perturbación y toma acción para
reducir el efecto de dicha variable sobre la variable a controlar. La diferencia entre este tipo de
esquema y el anterior es que la alimentación adelantada se utiliza para minimizar las
perturbaciones externas al lazo de retroalimentación simple. En el siguiente ejemplo se puede
apreciar claramente el efecto que se busca al añadir este tipo de lazo.
En general, se puede mostrar en los siguientes diagramas, la diferencia entre un lazo de
retroalimentación simple y un alimentación adelantada.
Controlador
Proceso Variable Manipulada
VariableControlada
Perturbación
FIG 12.8 ESQUEMAS DE CONTROL EN FEED FORWARD
Controlador
Proceso VariableManipulada
VariableControlada
Perturbación
FIG 12.9 ESQUEMAS DE CONTROL EN
RETROALIMENTACIÓN SIMPLE
FIG 12.7 ESQUEMA DE LA PLANTA
Lazo I: Esquema de retroalimentación simple
en el cual se controla la temperatura T, manipulando
el flujo de vapor. En este lazo de control si se tienen
variaciones de Ti , el controlador no toma ninguna
acción, sino hasta que la temperatura T se vea
modificada.
Lazo II: Este sería un lazo en alimentación
adelantada, el cual toma una acción una vez que
mide una variación en la temperatura (Ti ) a la
entrada.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
93

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
En estos diagramas se puede observar claramente que un esquema en retroalimentación
simple toma acción una vez que se haya modificado la variable a controlar, en tanto que, la
alimentación adelantada toma acción en el momento en que la perturbación presente una
variación.
Entre otras cosas se puede mencionar que en un esquema de control en alimentación
adelantada la variable a controlar no es la variable a medir, además, el controlar debe incluir la
información relativa al sistema, (fundamentada en un modelo del sistema), pues este debe
conocer el efecto que tiene la perturbación sobre la variable a controlar. Esto implica que este
controlador no es convencional, sino, particular según el sistema. A medida que sea mejor el
modelo del sistema, mejor será el controlador en alimentación adelantada. En forma general, se
puede plantear el siguiente procedimiento para el diseño del controlador en alimentación
adelantada.
Gp
Gd
+
+
d (s)Perturbación
Y(s) m(s)
Variable manipulada
Proceso
Salida del proceso
FIG 12.10 ESQUEMAS DEL PROCESO SIN CONTROL
En esta figura se muestra un proceso que no tiene ningún esquema de control, por lo que la
salida y(s) será:
y(s) = m(s)Gp + d(s)Gd
Si el valor de referencia deseado para y(s) fuese yref (s) se puede escribir:
Yref (s) = m(s)Gp + d(s)Gd
A partir de esta ecuación se puede encontrar el valor de m(s) (variable manipulada) tal que,
y(s) = y ref , como:
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
94

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
p
d
d
ref
GG
)s(dGy
)s(m ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−=
de aquí que se definirán las siguientes funciones de transferencia
)s(G)s(G
)s(Gp
dC = → Función de transferencia del controlador en Alimentación
adelantada.
)s(G1)s(Gd
ref = → Función de transferencia del elemento de referencia.
A partir de aquí se puede plantear el Diagrama de Bloques para el esquema planteado:
Retroalimentación adelantada
1/Gd + -
Gd/Gp
yref(s) d (s)
Gp
Gd
+
+
y(s) m(s)
Proceso
FIG 12.11 DIAGRAMA DE BLOQUES CON CONTROL EN ALIMENTACIÓN ADELANTADA
Si se le añaden las funciones de transferencia del medidor y del elemento final de control
entonces el esquema completo será:
Gf
Elemento finalde control
Retroalimentación adelantada
+ -yref(s)
d (s)
Gp
Gd
+
+
y(s)
m(s)
Proceso
Gm/Gd
mp
d
GGG
Gm
FIG 12.12 DIAGRAMA DE BLOQUES CON CONTROL EN ALIMENTACIÓN ADELANTADA COMPLETO
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
95

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
RESUMIENDO:
• La señal medida no es la señal controlada
• El controlador no es un controlador convencional (P, PI, PID) sino que depende del modelo
del proceso (Gp, Gd)
• Debido a que no es un modelo perfecto el controlador tendrá allí su mayor debilidad.
Este esquema pareciera perfecto, pues, se adelanta a tomar acciones de control en el
momento en que aparecen perturbaciones, pero, sería necesario identificar todas las
perturbaciones posibles, para así poder implementar tantos lazos como sea necesario, lo que no es
posible. Además, si hubiese algún cambio en un parámetro físico no podrá ser compensado, pues
no sería detectable.
Por todo lo anterior, lo mejor sería introducir un esquema de control que contenga
alimentación adelantada y retroalimentación a la vez cuyo Diagrama de Bloques se muestra
seguidamente:
Alimentación adelantada
Gm/Gd+ -
Gc2
yref (s) d (s)
Gp
Gd
+
+
y(s)
Gm2
Gf
+
Gc1
Gm1
+ -
yref (s)
Retroalimentación Simple
FIG 12.13 DIAGRAMA DE BLOQUES CON CONTROL EN ALIMENTACIÓN ADELANTADA
A partir de dicho diagrama se puede obtener:
y = Gp m(m) + GC⋅d(s) y sustituyendo se tiene:
)s(dGGGG1GGGGG
yGGGG1G
GGGGG
)s(y11
22
11
2
1
mCfp
mCfpdref
mCfp
d
mCCfp
⋅+
−+⋅
+
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
96

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
De allí se observa que la estabilidad del sistema a lazo cerrado depende de la ecuación:
1 + Gp⋅Gf⋅Gc1⋅Gm1 = 0
Siendo esta ecuación dependiente sólo del lazo de retroalimentación, es más, Gp⋅Gf⋅Gc1⋅Gm1
es la función de transferencia de lazo abierto para el lazo de retroalimentación. Por lo que se
puede concluir que la estabilidad del sistema sólo depende del lazo de retroalimentación, y no se
ve alterada al añadir un lazo de alimentación adelantada.
12.3 ESQUEMA DE CONTROL DE RELACIÓN: Se utiliza para controlar la relación entre dos flujos, los dos flujos son medidos, pero sólo uno es
controlado.
Se pueden mostrar dos configuraciones para el control de relación:
ESQUEMA (a): Se miden ambos flujos y se obtiene su relación, se compara con la relación
deseada (referencia) y se manipula uno de los flujos.
ESQUEMA (b): Se miden ambos flujos, se multiplica el flujo no controlado por la relación
deseada y se utiliza como referencia para un controlador de flujo que manipulará el otro flujo
para obtener el resultado deseado.
Este tipo de esquema es muy utilizado en diferentes procesos químicos como, Relación entre dos
reactantes, relación aire (combustible, etc.)
12.4 ESQUEMA DE CONTROL “OVERRIDE”
Este es un tipo de esquema de control selectivo con el cual es posible controlar más de una
variable teniendo una sola variable manipulada, transfiriendo la acción de control de un
controlador a otro según sea la necesidad. Es utilizado para evitar que algunas variables puedan
alcanzar límites peligrosos, inferiores o superiores, que puedan perjudicar el buen funcionamiento
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
97

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
de una planta. Para ello se utilizan ciertos tipos de “switches”, el HSS (High Selector Switch) y el
LSS (Low Selector Swich), los cuales se utilizan para evitar que una variable pueda exceder de
un valor máximo o mínimo respectivamente.
Un ejemplo típico para este tipo de esquema de control se puede implementar en una caldera,
donde la presión del vapor de salida es una variable controlada, pero el nivel del líquido dentro de
la caldera debe mantenerse en observación, pues no puede bajar más allá de un valor mínimo. En
la siguiente figura se muestra un esquema de control en “Override”, en el cual el Lazo I se utiliza
para mantener el control sobre la presión de salida y si el nivel presenta un valor menor al
mínimo establecido, el LSS cambia de esquema de control y pone en funcionamiento el Lazo II,
con la intención de controlar el nivel.
Otro ejemplo de aplicación para este tipo de esquema de control se presenta en el sistema de
protección de un compresor, en el cual su descarga es controlada con un sistema de control de
flujo en cascada con un control secundario de la velocidad del motor, tal como se muestra en la
siguiente figura. Para prevenir que la descarga sobrepase ciertos valores de presión se introduce
el esquema de control en “Override” utilizando un HSS (High Switch Selector), que transfiere la
acción de control entre el lazo I y el Lazo II al ocurrir una sobrepresión en la descarga.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
98

XII. OTROS ESQUEMAS DE CONTROL Control de Procesos II PS-2320
12.5 ESQUEMA DE CONTROL “SPLIT-RANGE”
Un esquema de control de este tipo es aquel que teniendo solamente una variable medida y
controlada, puede manipular más de una variable para lograr lo establecido. Es decir, se controla
una sola variable coordinando acciones sobre varias variables, que tienen el mismo efecto sobre
la variable controlada.
A continuación se muestra un ejemplo en el cual se implanta un esquema de control de este tipo,
en el cual se desea mantener controlada la presión de una línea de gas producto de la salida de
varias calderas. En este caso, se manipulan los flujos de salida de cada una de las calderas
simultáneamente para lograr la presión de salida deseada.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
99
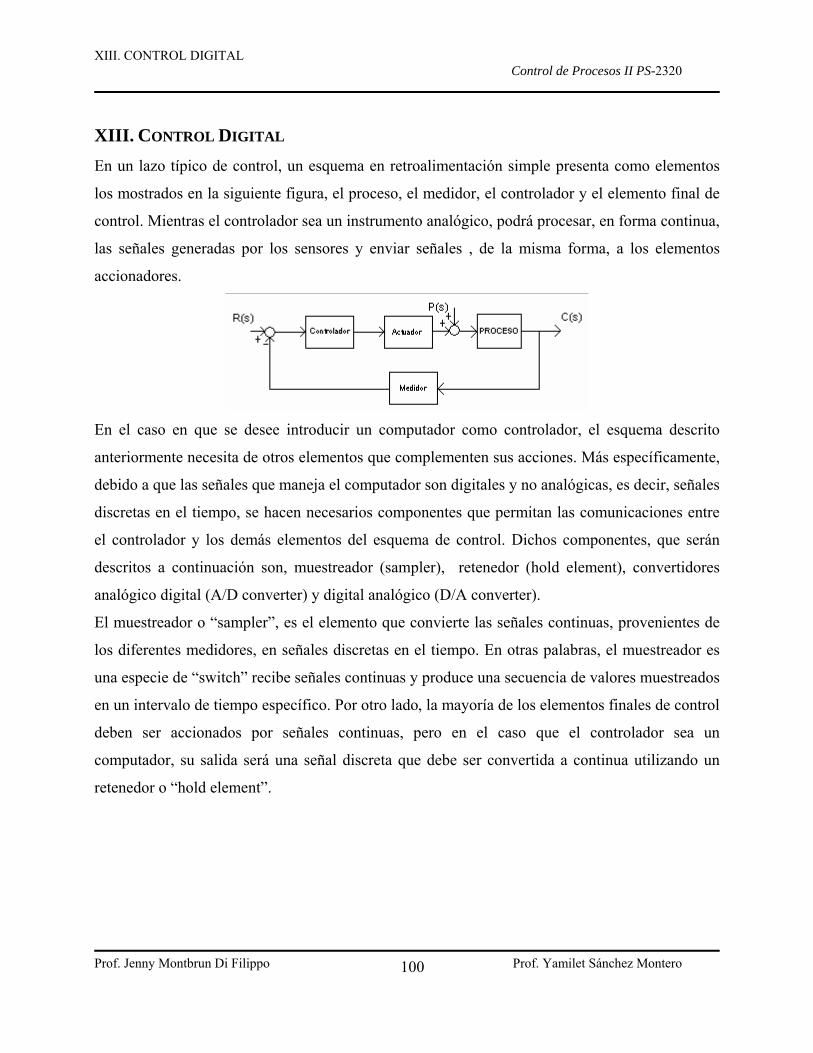
XIII. CONTROL DIGITAL Control de Procesos II PS-2320
XIII. CONTROL DIGITAL En un lazo típico de control, un esquema en retroalimentación simple presenta como elementos
los mostrados en la siguiente figura, el proceso, el medidor, el controlador y el elemento final de
control. Mientras el controlador sea un instrumento analógico, podrá procesar, en forma continua,
las señales generadas por los sensores y enviar señales , de la misma forma, a los elementos
accionadores.
En el caso en que se desee introducir un computador como controlador, el esquema descrito
anteriormente necesita de otros elementos que complementen sus acciones. Más específicamente,
debido a que las señales que maneja el computador son digitales y no analógicas, es decir, señales
discretas en el tiempo, se hacen necesarios componentes que permitan las comunicaciones entre
el controlador y los demás elementos del esquema de control. Dichos componentes, que serán
descritos a continuación son, muestreador (sampler), retenedor (hold element), convertidores
analógico digital (A/D converter) y digital analógico (D/A converter).
El muestreador o “sampler”, es el elemento que convierte las señales continuas, provenientes de
los diferentes medidores, en señales discretas en el tiempo. En otras palabras, el muestreador es
una especie de “switch” recibe señales continuas y produce una secuencia de valores muestreados
en un intervalo de tiempo específico. Por otro lado, la mayoría de los elementos finales de control
deben ser accionados por señales continuas, pero en el caso que el controlador sea un
computador, su salida será una señal discreta que debe ser convertida a continua utilizando un
retenedor o “hold element”.
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
100
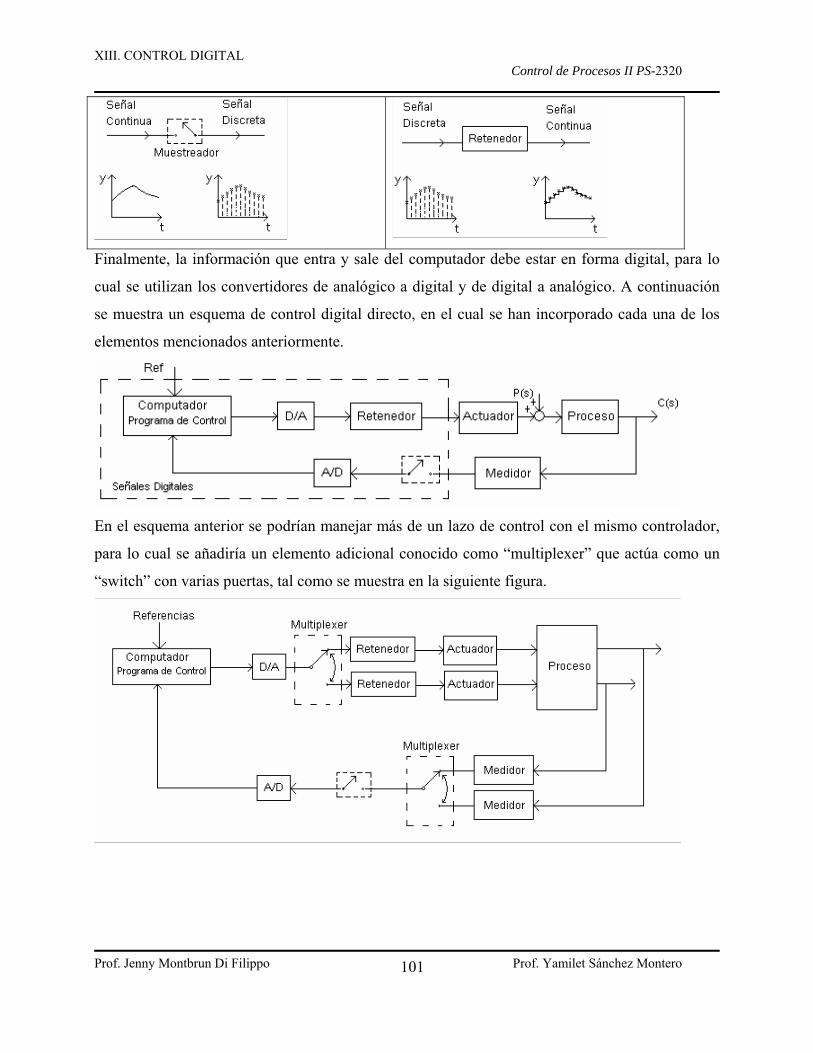
XIII. CONTROL DIGITAL Control de Procesos II PS-2320
Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero
101
Finalmente, la información que entra y sale del computador debe estar en forma digital, para lo
cual se utilizan los convertidores de analógico a digital y de digital a analógico. A continuación
se muestra un esquema de control digital directo, en el cual se han incorporado cada una de los
elementos mencionados anteriormente.
En el esquema anterior se podrían manejar más de un lazo de control con el mismo controlador,
para lo cual se añadiría un elemento adicional conocido como “multiplexer” que actúa como un
“switch” con varias puertas, tal como se muestra en la siguiente figura.