hoja de trabajo 23 -...
TRANSCRIPT

Hoja de Trabajo 23
Ondas y Rotaciones Dinámica de las Rotaciones III
Jaime Feliciano Hernández
Universidad Autónoma Metropolitana - Iztapalapa México, D. F. 15 de agosto de 2012
INTRODUCCIÓN. Consideremos una partícula de masa m y cuya posición (respecto a algún sistema de referencia inercial) viene dada por el vector rr . Sea la fuerza neta que actúa sobre la partícula. Entonces, de acuerdo a la segunda ley de Newton, la ecuación de movimiento es:
Fr
dtpdFrr
= (1)
Tomando el producto cruz con el vector rr se obtiene:
dtpdrFrr
rrr ×=×
Por otra parte, observemos que:
( )dtpdrvmv
dtpdrpv
dtpdrp
dtrd
dtprd r
rrrr
rrrr
rrrrr
×+×=×+×=×+×=× )(
dtpdrvvmr
rrr ×+×= )(
El primer término del lado derecho es el producto vectorial de un vector por sí mismo, cuyo resultado es cero, pues el producto vectorial de dos vectores paralelos se cancela. Así pues, el resultado es:
( ) τrrr
rr
rr=×=×=
× Frdtpdr
dtprd
A. MOMENTO CINÉTICO DE UNA PARTÍCULA. Definimos a la cantidad ( ) lpr
rrr =× como el vector de momento angular o momento cinético, por lo que podemos escribir:
τrrr
r
=×= Frdtld
Entonces
dtldr
r =τ (2)
Esta ecuación es la generalización de la ecuación (1) para el caso de rotaciones. Igual que en el caso de la torca, el momento angular de una partícula depende del origen que se use para evaluarlo. Si la torca que actúa sobre una partícula, medida respecto a cierto origen es nulo, entonces el momento angular de la partícula, respecto al mismo origen, no variaría en el tiempo, es decir, se conservará, es decir que:
1
Hoja de Trabajo 23
Si la suma de todas las torca externas al
sistema es cero, 0=∑ iτr , entonces: 0==
dtldr
rτ
Por lo tanto: 0=dtldr
Esto implica, necesariamente, que el momento angular o momento cinético se
conserva: .ctel =
r (3)
La magnitud del vector de momento angular es:
)(θsenprl rrr=
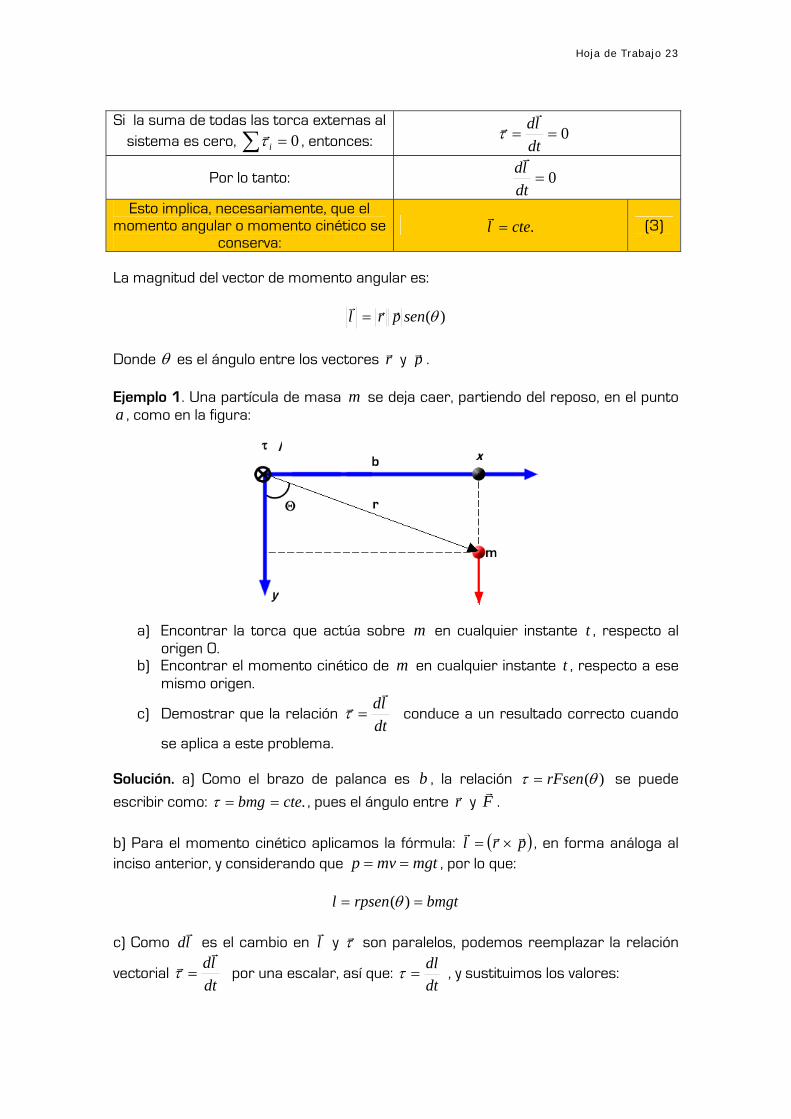
Donde θ es el ángulo entre los vectores rr y pr . Ejemplo 1. Una partícula de masa se deja caer, partiendo del reposo, en el punto
, como en la figura: m
a
a) Encontrar la torca que actúa sobre en cualquier instante , respecto al origen 0.
m t
b) Encontrar el momento cinético de en cualquier instante , respecto a ese mismo origen.
m t
c) Demostrar que la relación dtldr
r =τ conduce a un resultado correcto cuando
se aplica a este problema. Solución. a) Como el brazo de palanca es , la relación b )(θτ rFsen= se puede
escribir como: .ctebmg ==τ , pues el ángulo entre rr y Fr
. b) Para el momento cinético aplicamos la fórmula: ( )prl rrr
×= , en forma análoga al inciso anterior, y considerando que mgtmvp == , por lo que:
bmgtrpsenl == )(θ c) Como es el cambio en y ld
rlr
τr son paralelos, podemos reemplazar la relación
vectorial dtldr
r =τ por una escalar, así que: dtdl
=τ , y sustituimos los valores:
2

Hoja de Trabajo 23
( ) mgbmgbtdtdmgb ==
Si dividimos por la constante : b
)()( mvdtdmgt
dtdmg ==
Que es lo que se buscaba demostrar. B. MOMENTO ANGULAR DE VARIAS PARTÍCULAS. Si consideramos un sistema de partículas, para calcular el momento cinético total L
r respecto de un origen común,
se puede hacer sumando vectorialmente los diferentes momentos cinéticos individuales de cada partícula:
∑=
=++++=n
iin lllllL
1321 ,...,
rrrrr
De la misma manera, podemos escribir para la torca externa total, es decir la generalización de la ecuación (2):
dtLd
Ext
rr =τ
En palabras, podemos decir que: El cambio o rapidez de cambio del momento cinético total de un sistema de partículas respecto a un origen común, es igual a la suma de las torcas que actúan sobre ellas. Y nuevamente podemos ver que cuando la torca externa es cero, entonces el momento cinético total del sistema de partículas se conserva:
00 ==dtLdSi Ext
rrτ
.cteL =∴
r
C. ENERGÍA CINÉTICA DE ROTACIÓN Y LA INERCIA ROTACIONAL. Consideremos un sólido rígido rotando con velocidad angular ω , tal y como muestra la figura:
3

Hoja de Trabajo 23
Como ya hemos visto, podemos pensar que cada partícula gira en una trayectoria circular, y cada una tiene una energía cinética dada. Una partícula de masa y una distancia m r al eje de rotación, con rapidez angular ω , como ya se vio anteriormente es rv ω= . Por lo tanto la energía cinética es:
222
21
21 ωmrmv = (4)
Esta es la energía de una sola partícula en el sólido, por lo que si consideramos a un conjunto de partículas como las que conforman al sólido, podemos generalizarla de tal manera que la energía cinética total será la suma de las energías individuales:
∑=
=++++=n
iiinnc vmvmvmvmvmE
1
22233
222
211 2
121,....,
21
21
21
Si sustituimos la ecuación (4):
2222
3322
2222
1122
33222
211 2
1,....,21
21
21
21,....,
21
21
21 ωωωω nnnnc rmrmrmrmvmvmvmvmE ++++=++++=
2
1
2
1
22
21
21 ω⎟
⎠
⎞⎜⎝
⎛== ∑∑
==
n
iii
n
iiii rmvrm
Aquí hemos supuesto que la velocidad angular es la misma para todos los puntos al interior del cuerpo, por lo que podemos “sacarla” del signo de suma, al igual que el
factor 21
.
4

Hoja de Trabajo 23
Definimos al factor como la inercia rotacional del sistema, por lo que: ⎟⎠
⎞⎜⎝
⎛≡ ∑
=
n
iii rmI
1
2
2
21 ωIEc = (5)
Si comparamos con la ecuación (4) podemos decir que la inercia rotacional es la generalización de la masa o de la inercia para el caso de los sistemas en rotación. Sus unidades son las de masa por las del cuadrado de la longitud [ ] [ ][ ]2LMI = . La inercia rotacional depende de la posición o de la geometría respecto al eje de rotación, así que si la distribución de masa respecto a dicho eje cambia, la inercia rotacional cambiará. Así, consideremos los siguientes cuerpos:
(A) (B) (C) (D) Precisamente, considerando la geometría y la distribución de las masas que rotan alrededor del eje de los objetos de las gráficas, tenemos las siguientes relaciones: z
)()()()( DCBA IIII <<<
)()()()( Dc
Cc
Bc
Ac EEEE <<<
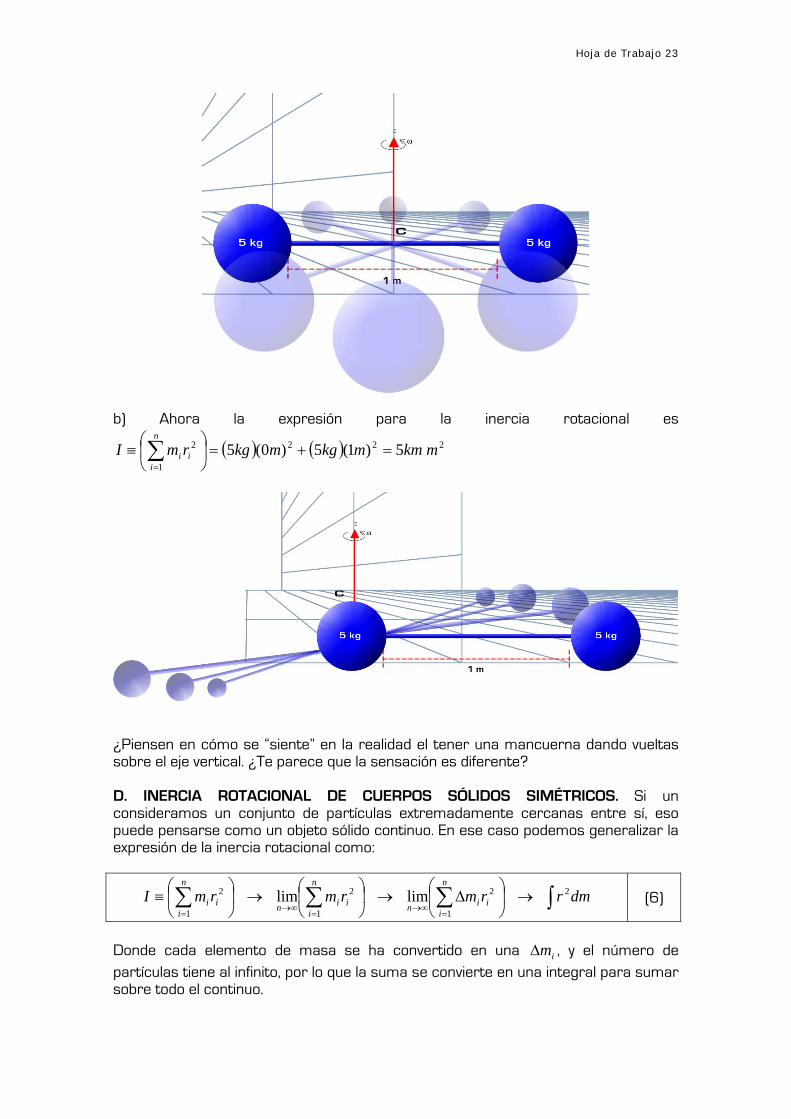
Ejemplo. Considere un cuerpo formado por dos esferas de masa 5kg cada una, unidas por una barra fija de 1 m de largo. Tratando ambas esferas como partículas y despreciando la masa de la barra, a) determinar la inercia rotacional respecto a un eje que pase por el centro de la barra, b) respecto de un eje normal que pase por una de las esferas: Solución. a) Empleamos la definición para la inercia rotacional, sustituimos los
valores de las masas y las distancias o
sea: .
( ) ( ) 22
1
2 )5.0(5)5.0(5 mkgmkgrmIn
iii −+=⎟⎠
⎞⎜⎝
⎛≡ ∑
=
( ) 22 5.2)25.0(52 mkgmkgI ==
5
Hoja de Trabajo 23
b) Ahora la expresión para la inercia rotacional es
( ) ( ) 222
1
2 5)1(5)0(5 mkmmkgmkgrmIn
iii =+=⎟⎠
⎞⎜⎝
⎛≡ ∑
=
¿Piensen en cómo se “siente” en la realidad el tener una mancuerna dando vueltas sobre el eje vertical. ¿Te parece que la sensación es diferente? D. INERCIA ROTACIONAL DE CUERPOS SÓLIDOS SIMÉTRICOS. Si un consideramos un conjunto de partículas extremadamente cercanas entre sí, eso puede pensarse como un objeto sólido continuo. En ese caso podemos generalizar la expresión de la inercia rotacional como:
∫∑∑∑ →⎟⎠
⎞⎜⎝
⎛Δ→⎟
⎠
⎞⎜⎝
⎛→⎟
⎠
⎞⎜⎝
⎛≡
=∞→
=∞→
=
dmrrmrmrmIn
iiin
n
iiin
n
iii
2
1
2
1
2
1
2 limlim (6)
Donde cada elemento de masa se ha convertido en una imΔ , y el número de partículas tiene al infinito, por lo que la suma se convierte en una integral para sumar sobre todo el continuo.
6

Hoja de Trabajo 23
Para cuerpos geométricos simétricos tenemos algunos resultados que se pueden calcular más o menos de forma sencilla, por ejemplo el siguiente: Ejemplo. Un cilindro anular (tubo) que gira en torno a un eje axial. Encontrar la inercia rotacional. Solución. El elemento de masa más conveniente es u cilindro de radio y de longitud
drL . Si suponemos que la densidad de materia ρ es constante, entonces:
dVdmVm ρρ =⇒=
Como el volumen de un cilindro es:
LrV 2π= LrdrdV π2=⇒
rdrLdm π2= ρ∴
Sustituyendo en la ecuación (6):
LrdrrdmrIR
R
πρ22
1
22 ∫∫ ==
drrLIR
R∫=
2
1
32πρ
( ) ( )41
42
41
42
4
242
42
2
1
RRLRRLrLIR
R
−=−
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
πρπρπρ
Esta expresión la podemos escribir como:
( )( )21
22
21
222
RRRRLI +−=πρ
Como la masa del cilindro hueco ( ) es igual al producto de la densidad por su
volumen, definimos: CHV
( )21
22 RRLM −≡ ρπ , pues ( )2
122 RRLVCH −≡ π , por lo que:
Momento de inercia de un tubo: ( )21
222
1 RRMI += (7)
7

Hoja de Trabajo 23
Un caso especial es cuando el radio interno es cero, es decir se trata de una barra sólida o de una varilla. En
ese caso:
22
1 MRI =2
(8)
Si el radio interno es muy parecido al radio externo, tenemos un tubo muy delgado, por lo que si , RRR ≡≈ 21
de la ecuación (7) tenemos:
( ) 2221 MRRMI ==2
(9)
Recordemos que cuando definimos el centro de masa, llamamos a el
primer momento de inercia. A
∫= rdmI
∫= dmrI 2 le llamamos el segundo momento de
inercia. Tabla de algunos valores de Inercia Rotacional.
Un aro en torno al eje del cilindro.
Cilindro anular (o anillo) en torno al eje del cilindro.
Cilindro sólido en torno al eje del cilindro.
Cilindro sólido en torno al diámetro central.
Una varilla delgada en torno a un eje que pase por el
centro y perpendicular a la longitud L
Una varilla delgada en torno a un eje que pase por un
extremo y perpendicular a la longitud L
8

Hoja de Trabajo 23
Esfera sólida en torno a cualquier diámetro.
Cascarón esférico delgado en torno a cualquier
diámetro.
Aro en torno a cualquier diámetro.
Una placa en torno al eje perpendicular al eje que
pasa por su centro. Cono en torno al eje axial.
Una placa en torno al eje perpendicular que pasa por un costado a la mitad de su
centro de masa. D. TEOREMA DE LOS EJES PARALELOS. Existe una relación simple y muy útil entre la inercia rotacional respecto a un eje cualquiera y la inercia rotacional respecto al eje que pasa por el centro de masa. El teorema de los ejes paralelos se enuncia de la siguiente manera:
La inercia rotacional de cualquier cuerpo en torno a un eje arbitrario es igual a la inercia rotacional alrededor de un eje paralelo que pase por el centro de masa más la masa total por la distancia entre los dos ejes elevada al cuadrado
2+= MhII cm
9

Hoja de Trabajo 23
Donde I es la inercia de rotación alrededor del eje arbitrario, es la inercia rotacional alrededor del eje que pasa por el centro de masa,
cmIM es la masa
total del cuerpo y es la distancia entre ambos ejes. h
Consideremos la siguiente figura. En ella se muestra una placa delgada en el plano XY que puede considerarse
como un conjunto de partículas. Deseamos calcular la inercia
rotacional de este objeto con respecto al eje que pasa por el punto P, que es
paralelo al eje Z y sale del plano. Representamos cada partícula como
una pequeña masa y sus
coordenadas por y respecto al origen O. También podemos emplear otro sistema de referencia primado, donde las coordenadas son y con respecto al centro de masa C.
im
ix iy
'ix '
iy
La inercia rotacional respecto al eje que pasa por O es:
)( 222 ∑ +== iiiii yxmrmI
Con relación a O, el centro de masa tiene las coordenadas y . De la
figura podemos ver que hay una relación entre las coordenadas y
y y :
cmx cmy
ix
iy 'ix '
iy
cmii xxx = +'
cmii yyy
+' =
( ) ( )[ ]∑ +++= 22 '' cmicmii yyxxmI Sustituyendo estas transformaciones,
tenemos que: ( )∑ +++++= 2222 '2''2' cmcmiicmcmiii yyyyxxxxm
Reagrupando términos: ( )( )∑
∑∑∑++
++++=22
22 '2'2''
cmcmi
iicmiicmiii
yxm
ymyxmxyxm
La primera suma es precisamente la inercia rotacional
( )22 '' iiicm yxmI += ∑
Los dos términos siguientes se parecen a las fórmulas usadas para calcular las coordenadas del centro de masa y . Y como
están calculadas con respecto al centro de masa se anulan:
0' =cmx 0' =cmy
0' ==∑ ii xm
0' ==
∑ ii ym
De acuerdo al triángulo rectángulo de la figura, el último término es
222cmcm yxh +=
Mhmhhm 222 === ii ∑∑
Por lo tanto: 2MhII cm +=
10

Hoja de Trabajo 23
Ejemplos. Consideremos los objetos de la columna de la izquierda. Emplear el teorema de los ejes paralelos para determinar la inercia rotacional de los mismos cuerpos pero con los ejes desplazados al borde.
La inercia rotacional la calculamos con , donde 2MhII cm +=12
2MLIcm = . En el
segundo caso, cuando 2Lh = , así que:
3124
123
412
222222 MLMLMLMLMLMLI ==+
=+=
Ahora 2
2MLIcm = y h R= , así que si sustituimos:
23
2
22
2 MLMRMLI =+=
Aquí ( )
12
22 baMIcm+
= , 2ah = , por lo tanto:
( ) ( ) ( )
124
123
412
22222222 baMMabaMMabaMI +=
++=+
+=
11

Hoja de Trabajo 23
Como resumen podemos comparar las variables lineales y rotacionales:
E. ACTIVIDAD EN EQUIPO. Discuta con sus compañeros las formas de resolver los siguientes problemas.
F. ACTIVIDAD INDIVIDUAL. Entregar un reporte virtual al correo electrónico del profesor y del ayudante, conteniendo la integración de los conocimientos construidos en esta actividad, que consiste en:
a) El mapa conceptual Individual, los elementos que se han ido agregando en cada punto.
a) El mapa conceptual del equipo. b) Las respuestas personales. c) Las aportaciones del equipo.
12