guía e informe péndulo físico
DESCRIPTION
JHTRANSCRIPT
PREINFORME LABORATORIO DE FÍSICAUNIVERSIDAD NACIONAL DE COLOMBIA
SEDE MEDELLÍN
FÍSICA DE OSCILACIONES ONDAS Y ÓPTICA
TEMA: OSCILACIONES DE UN PÉNDULO COMPUESTO O FÍSICOPRÁCTICA N°: 4 GRUPO
N°:19DÍA: 25 HORA: 8-10
amEQUIPO N°:2
DOCENTE: Sandra Johana Fiebiger OchoaMONITOR: Mateo Moreno Gonzalez
INTEGRANTES1. Esteban Aristizabal
2. Franklin Morales
OBJETIVO GENERAL
Verificar el comportamiento periódico de oscilador armónico del péndulo compuesto
OBJETIVOS ESPECÍFICOS
Medir la aceleración de la gravedad mediante el análisis de la expresión del periodo del péndulo físico.
Medir el radio de giro de una regla. Reportar datos experimentales. Elaborar e interpretar gráficas experimentales.
FUNDAMENTO TEÓRICO:
Cifras significativas Propagación de incertidumbres Linealización Regresión lineal Oscilaciones del péndulo físico
INTRODUCCIÓN
Un péndulo compuesto (o péndulo físico) es cualquier cuerpo rígido que puede oscilar alrededor de un eje horizontal bajo la acción de la fuerza de gravedad. En la figura 1 se ilustra una posición general de un péndulo compuesto oscilando. En la misma figura se representa las fuerzas que actúan sobre el cuerpo rígido.
1

Figura 1. Diagrama de fuerzas en el movimiento de un péndulo compuesto
La distancia desde el punto de apoyo O hasta al centro de gravedad del cuerpo es igual a b. Si el momento de inercia respecto al eje que pasa por O del cuerpo rígido es , la segunda ley de Newton de rotación es:
Ecuación 1
De la cual fácilmente se obtiene que:
Ecuación 2
Se debe observar que la fuerza de reacción R que ejerce el pivote en O sobre el cuerpo rígido no hace torque, por lo que no aparece en la ecuación. Además, también es necesario resaltar que esta ecuación diferencial no es lineal, y por lo tanto el péndulo físico no oscila con Movimiento Armónico Simple. Sin embargo, para pequeñas oscilaciones (amplitudes del orden de los 10º), , por tanto:
Ecuación 3
La ecuación 3, indica que para pequeñas amplitudes el movimiento pendular es armónico y a partir de esta, haciendo uso de las unidades del Sistema Internacional, tenemos que la frecuencia propia en Hz y el periodo del sistema en segundos están dados por las ecuaciones 4 y 5 respectivamente.
Ecuación 4. Frecuencia del sistema
Ecuación 5. Periodo del sistema
Reemplazando la ecuación 6 (teorema de ejes paralelos) en la ecuación 5, se puede obtener que el periodo del sistema péndulo físico esta descrito por la Ecuación 7.
2

Ecuación 6
Ecuación 7. Expresión final para el Periodo del
sistema
Dónde:
= Radio de giro del cuerpo rígido respecto a un eje que pasa por el centro de masa y que es paralelo al eje que pasa por el punto de suspensión Og = Aceleración de la gravedadb = Distancia desde el punto de apoyo O hasta al centro de gravedad del cuerpo
PROCEDIMIENTO
Medir las dimensiones de la regla (largo y ancho). Reportarlas en la Tabla 1.
Realizar el montaje mostrado en la figura 2 y haciendo uso de una fotocompuerta y del instrumento virtual sonoscopio del paquete PhysicsSensor medir el tiempo necesario para que el péndulo realice una oscilación completa siguiendo los pasos descritos a continuación:
1. Suspender la regla del primer agujero y ubicar la fotocompuerta de tal forma que al oscilar el péndulo se interrumpa el haz de luz con el alambre delgado que se encuentra en su parte inferior. Ver figura 3
Figura 2
3

Figura 3
2. Para iniciar la adquisición de datos con la fotocompuerta proceder a conectarla al PC introduciendo la terminal USB en uno de los puertos USB del computador (para alimentar eléctricamente el Diodo Emisor de Luz –LED-) y la otra terminal a la entrada del micrófono (para entrar la señal de respuesta al PC). Posteriormente, ejecute el Sonoscopio de PhysicsSensor y haga oscilar el péndulo (RECORDAR que la amplitud de la oscilación debe ser pequeña para garantizar que el movimiento sea armónico simple).
3. Capturar la señal con el Sonoscopio dando clic en el botón capturar cuando el sistema se encuentre “estable” y antes de detener la captura asegúrese que mínimo se hayan realizado 3 interrupciones del haz de luz con el alambre que se encuentra en la parte inferior de la regla (péndulo físico). La señal obtenida en el sonoscopio será similar a la de la figura 4 donde cada uno de los picos mostrados equivale a una interrupción del haz de luz. Esta señal le permitirá medir el tiempo empleado por el péndulo para hacer una oscilación completa, a través de la medición del intervalo temporal entre el primer pico y el tercer pico de la señal.
Reportar el tiempo obtenido para este primer valor de b (distancia desde el punto de apoyo al centro de masa de la regla) con su respectiva incertidumbre en la Tabla 2.
Nota: Se debe evitar realizar ZOOM en el eje x en el Sonoscopio, ya que si esto se hace la incertidumbre de la medida cambiara.
4

Figura 4
4. Repetir el procedimiento anterior suspendiendo la regla en los demás agujeros (diferentes valores de b) e ir reportando los datos obtenidos en la Tabla 2 con su respectiva incertidumbre.
5. Con los datos recolectados en la Tabla 2 y a partir de una linealización de la ecuación del periodo del sistema (Ecuación 7), obtener el valor de la aceleración de la gravedad de la ciudad de Medellín y del radio de giro de la regla respecto a su centro de masa realizando el análisis de los resultados
obtenidos a partir de la regresión lineal de la gráfica empleando
el software de regresión lineal del paquete PhysiscSensor.
Ecuación 7. Linealización de la ecuación del
Periodo del sistema
6. Comparar el valor obtenido a partir de la regresión lineal de la aceleración de la gravedad con el valor que se reporta como valor convencionalmente
verdadero ( ) y comparar también el valor obtenido del radio
de giro con su valor calculado teóricamente.
7. Realizar las conclusiones y responder a las preguntas dadas al final de este documento con base en la práctica realizada.
I. RECOLECCIÓN DE DATOS
5
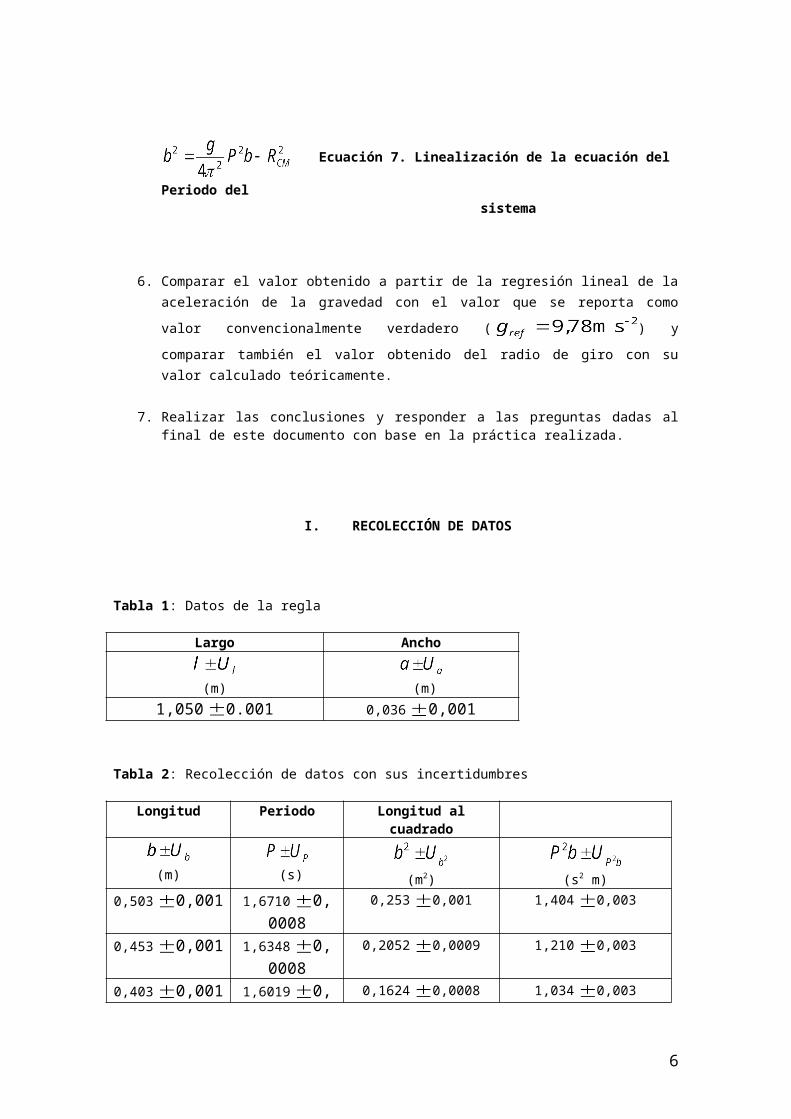
Tabla 1: Datos de la regla
Largo Ancho
(m) (m)1,050 0.001 0,036 0,001
Tabla 2: Recolección de datos con sus incertidumbres
Longitud Periodo Longitud al cuadrado
(m) (s) (m2) (s2 m)0,503 0,001 1,6710 0,000
80,253 0,001 1,404 0,003
0,453 0,001 1,6348 0,0008
0,2052 0,0009 1,210 0,003
0,403 0,001 1,6019 0,0008
0,1624 0,0008 1,034 0,003
0,353 0,001 1,5814 0,0008
0,1246 0,0007 0,883 0,003
0,303 0,001 1,5707 0,0008
0,0918 0,0006 0,748 0,003
0,253 0,001 1,5822 0,0008
0,0640 0,0005 0,633 0,003
0,203 0,001 1,6307 0,0008
0,0412 0,0004 0,540 0,003
0,153 0,001 1,7524 0,0008
0,0234 0,0003 0,470 0,003
0,103 0,001 2,0031 0,0008
0,0106 0,0002 0,413 0,004
Fórmulas para el cálculo de la incertidumbre:
Demostración:
Para encontrar esta incertidumbre tomaremos como función:
6

La fórmula para el cálculo de la incertidumbre será:
Derivando f con respecto a b tenemos:
Remplazando en la ecuación para el cálculo de la incertidumbre, se cancelan la raíz con el exponente, y finalmente obtenemos:
Demostración:
Para encontrar esta incertidumbre tomare como función:
La fórmula para el cálculo de la incertidumbre sera:
La derivada de g con respecto a P será:
La derivada de g con respecto a b dará:
Reemplazando ambas derivadas en la ecuación para la incertidumbre obtenemos:
Lo cual nos queda reorganizando:
7

II. ANÁLISIS GRÁFICO
vs
La pendiente de la gráfica es:
(0,2449 ± 0,0004) m/s^2
El intercepto con el eje de las ordenadas es:
( -0,0911 ± 0,0003 ) m^2
De acuerdo con el modelo,
o linealizado,
Se concluye que la aceleración de la gravedad se calcula empleando la expresión,
obteniéndose como valor:
8

9.66826 m/s^2
La incertidumbre en la medida de es:
(0,0004)
0,01487 m/s^2
Por lo tanto la aceleración de la gravedad se reporta así:
(9.67± 0,01) m/s^2
El porcentaje de error en la medida de la gravedad es (con base en el dato del valor convencionalmente verdadero para la aceleración de la gravedad
):
Error en la medida de la aceleración de la gravedad=
El radio de giro se calcula empleando la expresión,
obteniéndose como valor:
0,3019 m
y su incertidumbre es:
Demostración:
La fórmula para la obtención de incertidumbre es:
(1)
Para reemplazar las expresiones debemos hallar la derivada de Rcm en función de c, que da como sigue:
9

(2)
Reemplazando (2) en (1) se obtiene:
Como solo tenemos un dato para usar (el valor absoluto del intercepto en ‘y’) la raíz cuadrada se cancela con el exponente al cuadrado, de modo que queda:
Reacomodando la expresión nos da:
Con base en esto el radio de giro experimental se reporta así:
(0,3019 ± 0.0005 ) m
Para calcular el valor teórico de este radio de giro se emplea la expresión,
Donde corresponde al largo de la regla y a su ancho (ver tabla 1):
(1,05 ± 0.001) m
(0,036 ± 0.001) m
Reemplazando estos valores se obtiene (valor que se tomará como convencionalmente verdadero),
0.30328 m
y su incertidumbre es,
Demostración:
10

La fórmula para la obtención de incertidumbre es:
Aplicada a la incertidumbre que debemos hallar queda:
(3)
La derivada de Rcm con respecto a l queda:
Reacomodando la expresión queda:
(4)
La derivada de Rcm con respecto a ‘a’ queda:
Reacomodando la expresión da:
(5)
Reemplazando (4) y (5) en (3) se obtiene:
Organizando esta ecuación se tiene:
11

0,0002886 m
En definitiva el radio de giro teórico se reporta así:
(0.3033 ± 0,0003) m
Para finalizar, el porcentaje de error en la medida del radio de giro respecto al centro de masa es:
Error en la medida del radio de giro=
II. CONCLUSIONES
1. El péndulo compuesto con ángulos menores a 10 grados también logra un movimiento armónico simple, como lo vimos en el caso del péndulo simple.
2. En un péndulo físico, cuanto más se acerca el eje de oscilación al centro de gravedad, su periodo disminuye, luego aumenta.
3. Si aumentáramos el brazo de giro b, lograríamos que el tiempo que tome cada ciclo sea menor, esto debido a la relación inversa entre el período y la longitud b.
4. Para esta práctica obtuvimos dos porcentajes de error, uno para la pendiente y otro para el intercepto. El primero fue considerablemente bajo, pero el segundo estuvo un poco más alto esto pudo deberse a los instrumentos que usamos para sacar los valores necesarios o a factores externos como el clima, ya que en el laboratorio venteaba mucho lo que pudo haber hecho que el péndulo (Regla) se moviera diferente durante la toma de datos.
IV. SOLUCIÓN A PREGUNTAS
12

1. ¿Qué diferencias encuentra en las características físicas (forma) entre el péndulo físico y el péndulo simple? ¿Qué influencia tienen estas en su periodo?
Un péndulo simple es un montaje con cierta masa puntual colgada con un hilo que no se puede extender y sin masa. Por otro lado podemos decir que este oscila en el vacío y en un plano.
El péndulo físico, o péndulo compuesto es un cuerpo rígido capaz de oscilar alrededor de un eje fijo. La diferencia con el péndulo simple, que es solo una idealización, el péndulo físico es un objeto real, no puntual.
2. Con sus propias palabras, ¿Cómo podría explicar el concepto de momento de inercia?
Pues como lo explicado en clase podemos definir el momento de inercia con la siguiente expresión:
“Un objeto en reposo tiende a permanecer en reposo, y un objeto en movimiento tiende a continuar moviéndose en línea recta, a no ser que actúe sobre ellos una fuerza externa”.
Por lo tanto cualquier cuerpo que efectúa un giro alrededor de un eje, desarrolla inercia a la rotación, es decir, una resistencia a cambiar su velocidad de rotación y la dirección de su eje de giro. La inercia de un objeto a la rotación está determinada por su Momento de Inercia, siendo éste “la resistencia que un cuerpo en rotación opone al cambio de su velocidad de giro”.
13