grupo de geofÍsica matemÁtica y ... -...
TRANSCRIPT

GRUPO DE
GEOFÍSICA MATEMÁTICA Y COMPUTACIONAL
MEMORIA Nº 6
MÉXICO 2014
MEMORIAS GGMC INSTITUTO DE GEOFÍSICA UNAM

ii
MIEMBROS DEL GGMC
Dr. Ismael Herrera Revilla [email protected]
Dr. Luis Miguel de la Cruz Salas
Dr. Guillermo Hernández García [email protected]
Dra. Graciela Herrera Zamarrón
Dr. Norberto Vera Guzmán [email protected]
Dr. Álvaro Alberto Aldama Rodríguez
Depto. Recursos Naturales Instituto de Geofísica
UNAM
Publicado y distribuido por:
Grupo de Geofísica Matemática y Computacional
GGMC
Apartado Postal: 22-220 CP. 14000
Unidad de Apoyo Editorial

iii
Four General Purposes Massively Parallel DDM Algorithms By
Ismael Herrera and Alberto Rosas-Medina
del 2012
GRUPO DE
GEOFÍSICA MATEMÁTICA Y COMPUTACIONAL
GGMC

iv
CONTENTS
Abstract
1. INTRODUCTION 1
2. OVERVIEW OF THE DVS FRAMEWORK 4
3. THE ORIGINAL PROBLEM AND THE ORIGINAL NODES 6
4. DERIVED-NODES 8
5. THE “DERIVED VECTOR-SPACE (DVS)” 10
6. THE GENERAL PROBLEM WITH CONSTRAINTS 14
7. THE DVS-ALGORITHMS WITH CONSTRAINTS 15
8. NUMERICAL PROCEDURES 16
8.1- COMMENTS ON THE DVS NUMERICAL PROCEDURES 17
8.2- APPLICATION OF S 18
8.3- APPLICATION OF S -1 19
8.4- APPLICATION OF a 20
9. NUMERICAL RESULTS 21
10. CONCLUSIONS 24
REFERENCES 25
v
GGMC

Four General Purposes Massively Parallel DDM Algorithms By
Ismael Herrera and Alberto Rosas-Medina Instituto de Geofísica
Universidad Nacional Autónoma de México (UNAM) Apdo. Postal 22-220, México, D.F. 14000
Email: [email protected]
Abstract Parallel computers available nowadays require massively parallel software. DDMs are the approach to this problem; they seek algorithms capable of constructing the global solution by solving local problems, in each partition subdomain, exclusively. At present, however, competitive algorithms need to incorporate constraints, such as continuity on primal-nodes. This poses an additional challenge, which has been difficult to overcome. This paper is devoted to discuss four general-purposes preconditioned algorithms with constraints in which such a goal is achieved. Each one of them can be applied to symmetric, non-symmetric and indefinite problems, and here it is shown that they have update numerical efficiency and the global solution is obtained by solving local
Keywords: Massively-parallel algorithms; parallel-computers; non-overlapping DDM; DDM with constraints; BDDC; FETI-DP
problems, exclusively. Furthermore, the outstanding uniformity of the formulas from which they derive yields clear advantages for code development; for example, the construction of very robust codes. The new algorithms have been derived in the realm of the DVS-framework, recently introduced. Two of them are the DVS versions of BDDC and FETI-DP, respectively, which in this manner have been extended to non-symmetric and indefinite matrices. The originality of the other two is more complete, since we have not identified in the literature algorithms with clear similarities to them.
Equation Section 1
1.- INTRODUCTION Mathematical models of many systems of interest, including very important
continuous systems of Engineering and Science, lead to a great variety of partial
differential equations whose solution methods are based on the computational
processing of large-scale algebraic systems. Furthermore, the incredible expansion
experienced by the existing computational hardware and software has made
amenable to effective treatment problems of an ever increasing diversity and
complexity, posed by engineering and scientific applications.
Parallel computing is outstanding among the new computational tools, especially at
present when further increases in hardware speed apparently have reached

Ismael Herrera and Alberto Rosas Medina
2
insurmountable barriers. Therefore, the emergence of parallel computing during
the last twenty or thirty years, prompted on the part of the computational-modeling
community a continued and systematic effort with the purpose of harnessing it for
the endeavor of solving partial differential equations [1]. Very early after such an
effort began, it was recognized that domain decomposition methods (DDM) were
the most effective technique for applying parallel computing to the solution of
partial differential equations, since such an approach drastically simplifies the
coordination of the many processors that carry out the different tasks and also
reduces very much the requirements of information-transmission between them. At
the beginning much attention was given to overlapping domain decomposition
methods, but soon it was realized that iterative substructuring methods in non-
overlapping partitions, known as non-overlapping DDM, were more effective [2].
Hence, domain decomposition methods (DDM) have been developed mainly as a
tool for applying parallel computers to the solution of partial differential equations
and to this end non-overlapping DDM formulations split the domain of definition of
the partial differential equation at hand, or system of such equations, into many
subdomains with the intention of developing procedures that permit “solving the
global problem by exclusively solving problems separately defined in each one of
the partition subdomains, frequently called: local problems”. The basic idea is to
assign to each subdomain a different processor capable of solving the
corresponding local problem. However, at present it is recognized that competitive
algorithms need to incorporate constraints, such as continuity on primal-nodes [2-
6]. This poses an additional challenge for developing 100% parallelizable
algorithms, which has been difficult to overcome; indeed, up to now the most
effective DDM-algorithms do not fully achieve the above-stated goal [7] of “solving
the global problem by exclusively solving local
problems”.
The present paper is devoted to discussing four general non-overlapping DDM-
algorithms recently introduced and summarized in [8], which are referred to as
preconditioned DVS-algorithms with constraints. They are applicable to a wide

Four General Purposes Massively Parallel DDM Algorithms.
3 Memorias GMMC 2012 - 7
range of matrices that stem from the discretization of partial differential equations;
such matrices may be symmetric-definite, indefinite or non-symmetric. In the
present paper we show that each one of these algorithms enjoys the following
properties:
I. Possesses update numerical efficiency. Here, by update numerical
efficiency it is meant that their efficiency is at least as good that of the best
domain decompositions formulations existing today. Comparisons of
numerical performances were made with BDDC and FETI-DP [2-6]; and
II. “The global solution is obtained by exclusively solving local problems”.
The algorithms here discussed are formulated in the realm of the derived-vector
space (DVS) framework, which was recently introduced by I. Herrera and
coworkers [8-13]. The DVS, in the sense here used, was explained in [8]; the
reader is referred to [8-10] for the basic developments of this approach and to [11-
13] for background material on which the DVS-framework was built. The
developments to be presented are based on the extensive work on DDM done
during the last twenty years or so by many authors (see, for example [1,2]), albeit
what is special of our approach is the use of the DVS-framework, in which our
developments are set.
In this respect, we point out that two algorithms of the set of preconditioned DVS-
algorithms to be discussed are the DVS-versions of two well-known, very efficient
non-overlapping DDM approaches: the balancing domain decomposition with
constraints (BDDC) and the dual-primal finite-element tearing and interconnecting
(FETI-DP) methods, respectively [14]. The balancing domain decomposition
method was originally introduced by Mandel [15,16] and more recently modified by
Dohrmann who introduced constraints in its formulation [3,4], while the original
finite-element tearing and interconnecting method was introduced by Farhat [17,18]
and later modified by the introduction of a dual-primal approach [19-21]. It should
be mentioned that the BDDC and FETI-DP methods were originally developed for

Ismael Herrera and Alberto Rosas Medina
4
definite (positive definite) symmetric problems, although certain number of
applications to non-symmetric and indefinite matrices have been made (see, for
example, [6, 22-25]). On the other hand, the algorithms derived from the DVS-
versions of BDDC and FETI-DP are applicable to non-symmetric matrices
independently of the particular problem considered. As for the other two
preconditioned DVS-algorithms, their novelty is more complete, since they do not
correspond to any DDM previously reported in the literature [8].
Equation Section 2
2.- OVERVIEW OF THE DVS FRAMEWORK The ‘derived vector space framework (DVS-framework)’ starts with the system of
linear equations that is obtained after the partial differential equation, or system of
such equations, has been discretized; this system of discrete equations is referred
to as the ‘original problem’. Independently of the discretization method used, it is
assumed that a set of nodes and a domain-partition have been introduced and that
both the nodes and the partition-subdomains have been numbered. Generally,
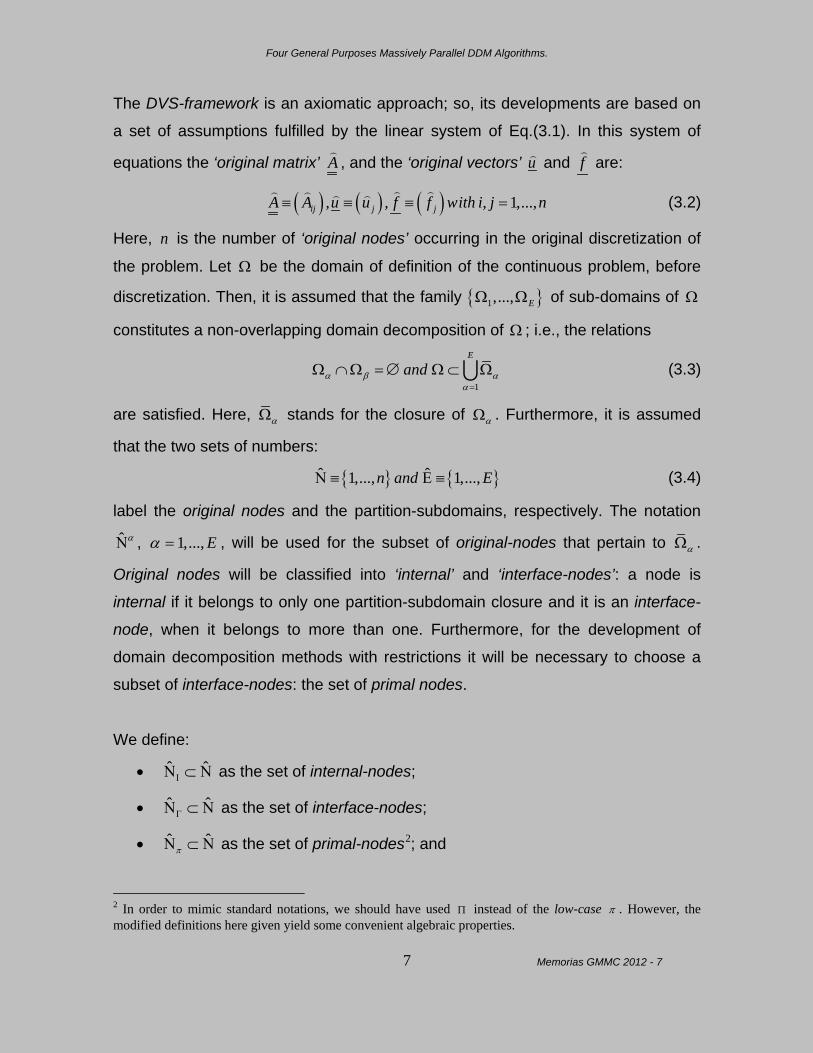
some of these original-nodes belong to more than one partition-subdomain (Fig.1).
For the formulation of non-overlapping domain decomposition methods it would be
better if each node would belong to one and only one partition-subdomain, and a
new set of nodes – the derived-nodes- that enjoy this property is introduced. This
new set of nodes is obtained by dividing each original-node in as many pieces as
required to obtain a set with the desired property (Fig.2). Then, each derived-node
is identified by means of an ordered-pair of numbers: the label of the original-node,
it comes from, followed by the partition-subdomain label, it belongs to. A ‘derived-
vector’ is simply defined to be any real-valued function1
1 For the treatment of systems of equations, vector-valued functions are considered, instead
defined in the whole set of
derived-nodes; the set of all derived-vectors constitutes a linear space: the
‘derived-vector space (DVS)’. The ‘Euclidean inner-product’, for each pair of
derived-vectors, is defined to be the product of their components summed over all
the derived-nodes. The DVS constitutes a finite-dimensional Hilbert-space, with

Four General Purposes Massively Parallel DDM Algorithms.
5 Memorias GMMC 2012 - 7
Figure 1. The ‘original nodes’
Figure 2. The ‘derived nodes’ respect to the Euclidean inner-product. A new problem, which is equivalent to the
original problem, is defined in the derived-vector space. Of course, the matrix of
Γ1Ω 2Ω
3Ω 4Ω
1 2 3 4 5
76 8
2521 22
9 10
11 12 13 14 15
16 17 18 19 20
23 24
1ΩΓ
2Ω
3Ω 4Ω
( )1,1 ( )2,1 ( )3,1 ( )3, 2 ( )4, 2( )5, 2
( )21, 3 ( )22, 3 ( )23, 3 ( )23, 4 ( )24, 4 ( )25, 4
( )13,1 ( )13,2
( )13,3 ( )13,4
( )6,1( )7,1
( )8,1
( )11,1 ( )12,1
( )8,2 ( )9,2 ( )10,2
( )14,2 ( )15,2
( )11,3 ( )12,3 ( )14,4 ( )15,4
( )16,3 ( )17,3 ( )18,3 ( )18,4 ( )19,4 ( )20,4

Ismael Herrera and Alberto Rosas Medina
6
this new problem is different to the original-matrix, which is only defined in the
original-vector space, and the theory supplies a formula for deriving it [8]. From
there on, in the DVS framework, all the work is done in the derived-vector space
and one never goes back to the original vector-space. In a systematic manner, this
framework led to the construction of the following preconditioned DVS-algorithms:
DVS-primal formulation #1, DVS-dual formulation #1, DVS-primal formulation #2
and DVS-dual formulation #2. However, the DVS-primal formulation #1 and DVS-
dual formulation #1 were later identified as DVS-versions of BDDC and FETI-DP,
respectively. With this adjustment in nomenclature, in [8] they were summarized as
it is indicated next. Thereby, it should be mentioned that standard versions of
BDDC and FETI-DP were originally formulated for definite-symmetric matrices
(positive-definite or negative-definite) [3,4,14-20]; thus, their extension to non-
symmetric and indefinite matrices is one of the achievements of the DVS-
framework.
The Four General Preconditioned Algorithms with Constraints that will be
studied in this paper are:
a).- The DVS-version of BDDC;
b).-The DVS-version of FETI-DP;
c).- DVS-primal formulation #2;
d).- DVS-dual formulation #2.
All these algorithms are preconditioned and are formulated in vector-spaces
subjected to constraints; so, they are preconditioned and constrained algorithms as
their titles indicate.
Equation Section 3
3.- THE ORIGINAL PROBLEM AND THE ORIGINAL NODES It will be assumed that the system of linear algebraic equations:
Au f=
(3.1)
is the result that has been obtained after the (linear) partial differential equation, or
system of such equations has been discretized. Eq.(3.1) will be referred to as the
‘original problem’ and, as said before, it will be the starting point of our discussions.
Four General Purposes Massively Parallel DDM Algorithms.
7 Memorias GMMC 2012 - 7
The DVS-framework is an axiomatic approach; so, its developments are based on
a set of assumptions fulfilled by the linear system of Eq.(3.1). In this system of
equations the ‘original matrix’ A
, and the ‘original vectors’ u and f
are:
( ) ( ) ( ) 1,...,ij j jA A , u u , f f with i, j n≡ ≡ ≡ =
(3.2)
Here, n is the number of ‘original nodes’ occurring in the original discretization of
the problem. Let Ω be the domain of definition of the continuous problem, before
discretization. Then, it is assumed that the family 1,..., EΩ Ω of sub-domains of Ω
constitutes a non-overlapping domain decomposition of Ω ; i.e., the relations
1
E
and α β αα=
Ω ∩Ω =∅ Ω⊂ Ω
(3.3)
are satisfied. Here, αΩ stands for the closure of αΩ . Furthermore, it is assumed
that the two sets of numbers:
ˆ ˆ1,..., 1,...,n and EΝ ≡ Ε ≡ (3.4)
label the original nodes and the partition-subdomains, respectively. The notation
ˆ αΝ , 1,..., Eα = , will be used for the subset of original-nodes that pertain to αΩ .
Original nodes will be classified into ‘internal’ and ‘interface-nodes’: a node is
internal if it belongs to only one partition-subdomain closure and it is an interface-
node, when it belongs to more than one. Furthermore, for the development of
domain decomposition methods with restrictions it will be necessary to choose a
subset of interface-nodes: the set of primal nodes.
We define:
• ˆ ˆΙΝ ⊂ Ν as the set of internal-nodes;
• ˆ ˆΓΝ ⊂ Ν as the set of interface-nodes;
• ˆ ˆπΝ ⊂ Ν as the set of primal-nodes2
2 In order to mimic standard notations, we should have used
; and
Π instead of the low-case π . However, the modified definitions here given yield some convenient algebraic properties.

Ismael Herrera and Alberto Rosas Medina
8
• ˆ ˆ ˆ ˆπ∆ Γ ΓΝ ≡ Ν − Ν ⊂ Ν as the set of dual-nodes.
For the time being, the set ˆ ˆπ ΓΝ ⊂ Ν may be any, depending on the specific
problem treated3
ˆ ˆ,Ι ΓΝ Ν
. Each one of the following two families of node-subsets is disjoint:
and ˆ ˆ ˆ, ,πΙ ∆Ν Ν Ν . Furthermore, these node subsets fulfill the relations:
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ and π πΙ Γ Ι ∆ Γ ∆Ν = Ν ∪Ν = Ν ∪Ν ∪Ν Ν = Ν ∪Ν (3.5)
Using the notations thus far introduced, the following assumption is adopted:
AXIOM 1.- “Let the indices ˆi α∈Ν and ˆj β∈Ν be internal original-nodes, then:
0,ijA whenever α β= ≠
(3.6)”
The real-valued functions defined in ˆ 1,..., nΝ = constitute a linear vector-space
that will be denoted by W and referred to as the ‘original vector-space’. When
u W∈ , we write ( )iu u i≡ for the value of u at any original-node ˆi∈Ν . As said
before, we use the notation ( )1,..., nu u u≡ for the original-vectors. Thereby, we
observe the duality of interpretation: original-vectors can also be thought as real-
valued functions defined in the finite-set ˆ 1,...,nΝ ≡ .
Equation Section 4
4.- DERIVED-NODES As said before, when a non-overlapping partition is introduced some of the nodes
used in the discretization belong to more than one partition-subdomain. To
overcome this inconvenient feature in the DVS-framework, besides the original-
nodes, another set of nodes is introduced, called the ´derived nodes’. The general
developments are better understood, through a simple example that we explain
first.
3 Extensive research has been carried out to establish criteria for the choice of ˆ
πΝ , which will not be discussed here.

Four General Purposes Massively Parallel DDM Algorithms.
9 Memorias GMMC 2012 - 7
Consider the set of twenty five nodes of a “non-overlapping” domain
decomposition, which consists of four subdomains, as shown in Fig.1. Thus, we
have a set of nodes and a set of subdomains, which are numbered using of the
index-sets: ˆ 1,..., 25Ν ≡ and ˆ 1, 2,3, 4Ε ≡ , respectively. Then, the sets of nodes
corresponding to such a non-overlapping domain decomposition is actually
overlapping
, since the four subsets
1 2
3 4
ˆ ˆ1, 2,3,6,7,8,11,12,13 3,4,5,8,9,10,13,14,15ˆ ˆ11,12,13,16,17,18,21,22,23 13,14,15,18,19,20,23,24,25
Ν ≡ Ν ≡
Ν ≡ Ν ≡ (4.1)
are not disjoint (see, Fig.1). Indeed, for example:
1 2ˆ ˆ 3,8,13Ν ∩Ν = (4.2)
In order to obtain a “truly” non-overlapping decomposition, we replace the set of
‘original nodes’ by another set: the set of ‘derived nodes’; a ‘derived node’ is
defined to be a pair of numbers: ( ),p α , where p corresponds a node that belongs
to αΩ . In symbols: a ‘derived node’ is a pair of numbers ( ),p α such that ˆp α∈Ν .
We denote by Χ the set of derived nodes; we observe that the total number of
derived-nodes is 36 while that of original-nodes is 25. Then, we define αΧ as the
set of derived-nodes that can be written as ( ),p α , where α is kept fixed. Taking α
successively as 1, 2 , 3 and 4 , we obtain the family of four subsets,
1 2 3 4, , ,Χ Χ Χ Χ , which is a truly disjoint decomposition of Χ , in the sense that
(see, Fig.2):
4
1
, and when α α β
α
α β=
Χ = Χ Χ ∩Χ =∅ ≠
(4.3)
Of course, the cardinality (i.e., the number of members) of each one of these
subsets is 36 4 equal to 9 .
The above discussion had the sole purpose of motivating the more general and
formal developments that follow. So, now we go back to the general case
introduced in Section 3, in which the sets of node-indexes and subdomain-indexes

Ismael Herrera and Alberto Rosas Medina
10
are ˆ 1,..., nΝ = and ˆ 1,..., EΕ = , respectively, and define a ‘derived-node’ to be
any pair of numbers, ( ),p α , such that ˆp α∈Ν . Then, the total set of derived-nodes,
is given by:
( ) ˆ ˆ,p & p αα αΧ ≡ ∈Ε ∈Ν (4.4)
When ( ),p α ∈Χ , ( ),p α is said to be a ‘descendant’ of ˆp∈Ν . Given any ˆp∈Ν ,
the full set of descendants of p is given by
( ) ( ) ( ) , ,p p pα αΖ ≡ ∈Χ (4.5)
The ‘multiplicity’, ( )m p , of any original-node ˆp N∈ is defined to be the cardinality
of ( )pΖ .
In order to avoid too many repetitions in the developments that follow, where we
deal extensively with derived-nodes, the notation ( ),p α is reserved for pairs such
that ( ),p α ∈Χ ; i.e., such that ˆp α∈Ν . Some subsets of Χ are defined next:
( ) ( ) ˆ ˆ, ,p p and p pα αΙ ΓΙ ≡ ∈Ν Γ ≡ ∈Ν (4.6)
( ) ( ) ˆ ˆ, ,p p and p pππ α α ∆≡ ∈Ν ∆ ≡ ∈Ν (4.7)
With each 1,..., Eα = , we associate a unique ‘local subset of derived-nodes’:
( ) ,pα αΧ ≡ (4.8)
The family of subsets 1 ,..., EΧ Χ , is a truly disjoint decomposition Χ of , the whole
set of derived-nodes, in the sense that:
1
,E
and when α α β
α
α β=
Χ = Χ Χ ∩Χ =∅ ≠
(4.9)
Equation Section 5
5.- THE “DERIVED VECTOR-SPACE (DVS)”
Firstly, we recall from Section 3 the definition of the vector space W . Then, for
each 1,..., Eα = , we define the vector-subspace W Wα⊂ , which is constituted by

Four General Purposes Massively Parallel DDM Algorithms.
11 Memorias GMMC 2012 - 7
the vectors that have the property that, for each ˆi α∉Ν , its i - component vanishes.
With this notation, the ‘product-space’ W , is defined by
1
1
...E E
W W W Wα
α =
≡ = × ×∏ (5.1)
As explained in Section 2, the ‘original problem’ of Eq.(2.4) is a problem formulated
in the original vector-space W and in the developments that follow we transform
this problem into one that is formulated in the product-space W , which is a space
of discontinuous functions.
By a ‘derived-vector’ we mean a real-valued function4
Χ
defined in the set of derived-
nodes, . The set of derived-vectors constitute a linear space, which will be
referred to as the ‘derived-vector space’. Corresponding to each local subset of
derived-nodes, αΧ , there is a ‘local subspace of derived-vectors’, W Wα ⊂ , which
is defined by the condition that vectors of W α vanish at every derived-node that
does not belong to αΧ . A formal manner of stating this definition is
• u W Wα∈ ⊂ , if and only if, ( ), 0u p β = whenever β α≠
An important difference between the subspaces W α and Wα
should be observed:
W Wα ⊂ , while W Wα⊄ . In particular,
1 ... EW W W= ⊕ ⊕ (5.2)
In words: the space W is the direct sum of the family of subspaces 1,..., EW W .
Using Eq.(5.2), it is straightforward to establish a bijection (actually, an
isomorphism) between the derived-vector space and the product-space.
1
E
Wα
α =∏ .
For every pair of vectors, u W∈ and w W∈ , the ‘Euclidean inner product’ is
defined to be
4 For the treatment of systems of equations, such as those of linear elasticity, such functions are vector-valued.

Ismael Herrera and Alberto Rosas Medina
12
( ) ( )( ),
, ,p
u w u p w pα
α α∈Χ
= ∑ (5.3)
In applications of the theory to systems of equations, when ( ),u p α itself is a
vector, Eq.(5.3) is replaced by
( ) ( )( ),
, ,p
u w u p w pα
α α∈Χ
= ∑ (5.4)
Here, u w means the inner product of the vectors involved. An important property
is that the derived-vector space, W , constitutes a finite dimensional Hilbert-space
with respect to the Euclidean inner product. We observe that this definition of the
Euclidean inner product is independent of the original matrix A
, which can be non-
symmetric or indefinite.
The natural injection, :R W W→ , of W into W , is defined by the condition that, for
every u W∈ , one has
( )( ) ( ) ( ), ,Ru p u p , pα α= ∀ ∈Χ (5.5)
A derived-vector, u , is said to be ‘continuous’ when ( ),u p α is independent of α ,
whenever ( ),p α ∈Χ . The subset of W , of continuous vectors, constitutes a linear
subspace that is denoted by 12W . It can be seen that :R W W→ defines a bijection
of W in 12W ; thus we write
112:R W W− → for the inverse of R , when restricted to
12W .
The subspace 11W W⊂ is defined to be the orthogonal complement of 12W , with
respect to the Euclidean inner-product. In this manner the space W is
decomposed into two orthogonal complementary subspaces: 11W W⊂ and
12W W⊂ . They fulfill
11 12W W W= ⊕ (5.6)

Four General Purposes Massively Parallel DDM Algorithms.
13 Memorias GMMC 2012 - 7
The derived-vectors that belong to 11W W⊂ will be said to be ‘zero-average
vectors’. Two matrices :a W W→ and :j W W→ are introduced; they are the
projections operators, with respect to the Euclidean inner-product, on 12W and 11W ,
respectively. The first one will be referred to as the ‘average operator’ and the
second one will be the ‘jump operator’, respectively. We observe that in view of
Eq.(5.6), every derived-vector, u W∈ , can be written in unique manner as the sum
of a zero-average vector plus a continuous vector (we could say: a zero-jump
vector); indeed:
11 11
11 1212 12
u ju Wu u u with
u au W
≡ ∈= + ≡ ∈
(5.7)
The vectors ju and au are said to be the ‘jump’ and the ‘average’ of u ,
respectively.
The following linear subspaces of W will be used in the sequel and are defined by
imposing some restrictions. The subspace rW W⊂ is the ‘restricted subspace’.
Vectors of
• IW vanish at every derived-node that is not an internal node;
• WΓ vanish at every derived-node that is not an interface node;
• Wπ vanish at every derived-node that is not a primal node; and
• W∆ vanish at every derived-node that is not a dual node.
Furthermore, it assumed that
• rrW W a W WπΙ ∆≡ + + ;
• rW W a WπΠ Ι≡ + .
Here, ra stands for the projection operator on rW . Thus far, only dual-primal
restrictions have been implemented. In that case,
• rW W aW WπΙ ∆≡ + + ;

Ismael Herrera and Alberto Rosas Medina
14
• W W aWπΠ Ι≡ + .
We observe that each one of the following families of subspaces are linearly
independent:
, , , ,W W , W W W , W WπΙ Γ Ι ∆ Π ∆
And also that
rW W W W W W and W W WπΙ Γ Ι ∆ Π ∆= + = + + = + (5.8)
The above definition of rW is appropriate when considering dual-primal
formulations; other kinds of restrictions require changing the term aWπ by ra Wπ ,
where ra is a projection on the restricted subspace.
Equation Section 6
6.- THE GENERAL PROBLEM WITH CONSTRAINTS The following result is similar to results shown in [9,10]. A proof, as well as the
definition of the matrix : r rA W W→ here used, is given in Appendix “A” of [8].
“A vector u W∈ is solution of the original problem, if and only if, 'u Ru W= ∈
fulfills the equalities:
' ' 0aAu f and ju= = (6.1)
The vector ( ) 12ˆ
rf R f W W≡ ∈ ⊂ , will be written as f f fΠ ∆
≡ + , with f WΠΠ∈
and f W∆∆∈ .”
We remark that this problem is formulated in W : the derived-vector space. In what
follows, the matrix A , when restricted to rW (i.e., : r rA W W→ ), is assumed to be
invertible. In many cases this can be granted when a sufficiently large number of
primal-nodes, adequately located, are taken. Let ' ru W∈ be solution of it, then
12'u W W∈ ⊂ necessarily, since ' 0ju = , and one can apply the inverse of the
natural injection to obtain
1ˆ 'u R u−= (6.2)

Four General Purposes Massively Parallel DDM Algorithms.
15 Memorias GMMC 2012 - 7
Thereby, we observe that the mapping 1R− is only defined when 'u is a continuous
vector. Due to this fact, Eq.(6.2) is not adequate for numerical applications, in
which 'u is only evaluated in an approximate manner and, therefore, usually will
not be continuous; i.e., Eq.(6.2) cannot be applied to such a 'u . For its numerical
application, it is better to replace Eq. (6.2) by
1 'u R au−= (6.3)
This replacement is very convenient, since 'au is the continuous vector closest to
'u (here, ‘closest’ is with respect to the Euclidean distance). Finally, we notice that
in all the algorithms to be presented all the operations are carried out in the
derived-vectors space, since the problem of Eq.(6.1) is formulated in W ; in
particular, we will never return to the original vector space, W , except at the end
when we apply Eq.(6.3).
Equation Section 7
7.- THE DVS-ALGORITHMS WITH CONSTRAINTS
The matrix A of Eq.(6.1), can be written as (see [8,9]):
A A
AA AΠΠ Π∆
∆Π ∆∆
=
(7.1)
Using this notation, we define the ‘Schur-complement matrix with constraints’, by
1S A A A A−
∆∆ ∆Π ΠΠ Π∆≡ − (7.2)
Furthermore, in what follows:
( ) ( )1f R f A A R f−
∆ ∆Π ΠΠ∆ Π≡ −
(7.3)
7.1- THE DVS VERSION OF THE BDDC ALGORITHM
The DVS-BDDC algorithm is [8]: “Find u W∆ ∆∈ such that
1 1 0aS aSu aS f and ju− −∆ ∆∆= = (7.4)”
Once u W∆ ∆∈ has been obtained, u W∈
solution of Eq.(3.1) is given by

Ismael Herrera and Alberto Rosas Medina
16
( ) ( ) 1 ~1~1u R a A A u A R f−∆ΠΠ Π∆ ΠΠ Π
= Ι − +
(7.5)
7.2- THE DVS VERSION OF FETI-DP ALGORITHM
The DVS-FETI-DP algorithm is [ ]: “Given f aW∆∆∈ , find Wλ ∆∈ such that
1 1 0jS jS jS jS f and aλ λ− −
∆= = (7.6)”
Once jWλ ∆∈ has been obtained, u aW∆∆ ∈ is given by:
( )1u aS f λ−∆ ∆= − (7.7)
Then, Eq.(7.5) can be applied to obtain u W∈
solution of Eq. (3.1).
7.3- THE DVS PRIMAL-ALGORITHM #2
This algorithm consists in searching for a function W∆ ∆∈v , which fulfills
1 1 1 0S jS j S jS jS f and aS− − −∆ ∆∆= =v v (7.8)”
Once 1S jSW−∆ ∆∈v has been obtained, then
( )1u a S f−∆∆ ∆
= −v (7.9)
and Eq.(7.5) can be applied to obtain u W∈
solution of Eq. (3.1).
7.4- THE DVS DUAL-ALGORITHM #2
This algorithm consists in searching for a function Wµ ∆∈ , which fulfills
1 1 1 1 0SaS a SaS aS jS f and jSµ µ− − − −
∆= = (7.10)
Once 1SaS Wµ −∆∈ has been obtained, u aW∆∆ ∈ is given by:
( )1u aS f µ−∆ ∆= + (7.11)
and Eq.(7.5) can be applied to obtain u W∈
solution of Eq. (3.1).
Equation Section 8 8.- NUMERICAL PROCEDURES

Four General Purposes Massively Parallel DDM Algorithms.
17 Memorias GMMC 2012 - 7
The numerical experiments were carried out with each one of the four
preconditioned DVS-algorithms with constraints enumerated in Section 7; they are:
1 1 0;aS aSu aS f and ju DVS - BDDC− −∆ ∆∆= = (8.1)
1 1 0;jS jS jS jS f and a DVS - FETI - DPλ λ− −
∆= = (8.2)
1 1 1 0;S jS j S jS jS f and aS DVS - PRIMAL - 2− − −∆ ∆∆= =v v (8.3)
and
1 1 1 1 0;SaS a SaS aS jS f and jS DVS - DUAL - 2µ µ− − − −
∆= = (8.4)
8.1- COMMENTS ON THE DVS NUMERICAL PROCEDURES
The outstanding uniformity of the formulas given in Eqs.(8.1) to (8.4) yields clear
advantages for code development, especially when such codes are built using
object-oriented programming techniques. Such advantages include:
I. The construction of very robust codes. This is an advantage of the DVS-
algorithms, which stems from the fact the definitions of such algorithms
exclusively depend on the discretized system of equations (which will be
referred to as the original problem) that is obtained by discretization of the
partial differential equations considered, but that is otherwise independent of
the problem that motivated it. In this manner, for example, essentially the
same code was applied to treat 2-D and 3-D problems; indeed, only the part
defining the geometry had to be changed, and that was a very small part of
it; II. The codes may use of different local solvers, which can be direct or iterative
solvers; III. Minimal modifications are required for transforming sequential codes into
parallel ones; and IV. Such formulas also permit to develop codes in which “the global-problem-
solution is obtained by exclusively solving local problems”.

Ismael Herrera and Alberto Rosas Medina
18
This last property must be highlighted, because it makes the DVS-algorithms very
suitable as a tool to be used in the construction of massively-parallelized software,
which is needed for efficiently programming the most powerful parallel computers
available at present. Thus, procedures for constructing codes possessing Property
IV are outlined and analyzed next.
All the DVS-algorithms of Eqs.(8.1) to (8.4) are iterative and can be implemented
with recourse to Conjugate Gradient Method (CGM), when the matrix is definite
and symmetric, or some other iterative procedure such as GMRES, when that is
not the case. At each iteration step, one has to compute the action on a derived-
vector of one of the following matrices: 1aS aS− , 1jS jS − , 1S jS j− or 1SaS a− ,
depending on the DVS-algorithm that is applied. Such matrices in turn are different
permutations of the matrices S , 1S − , a and j . Thus, to implement any of the
preconditioned DVS-algorithms, one only needs to separately develop codes
capable of computing the action of one of the matrices S , 1S − , a or j on an
arbitrary vector of W , the derived-vector-space. Therefore, next we separately
explain how to compute the application of each one of the matrices S and 1S − . As
for a and j , as it will be seen, their application requires exchange of information
between derived-nodes that are descendants of the same original-node.and that is
a very simple operation for which such exchange of information is minimal.
8.2- APPLICATION OF S
From Eq.(7.2), we recall the definition of the matrix S :
1S A A A A−
∆∆ ∆Π ΠΠ Π∆≡ − (8.5)

Four General Purposes Massively Parallel DDM Algorithms.
19 Memorias GMMC 2012 - 7
In order to evaluate the action of S on any derived-vector, we need to successively
evaluate the action of the following matrices AΠ∆
, ~1AΠΠ
, A∆Π
and A∆∆
. Nothing
special is required except for ~1AΠΠ
, which is explained next.
We have
t t r
r t r t r
A A A A aA
A A a A a A aπ π
π ππ π ππ
ΙΙ Ι ΙΙ Ι
ΠΠΙ Ι
≡ =
(8.6)
Let w W∈ , be an arbitrary derived-vector, and write
1A w−
ΠΠ≡v (8.7)
Then, ( )Wπ π∈v is characterized by
( ) ~1 0A w A A w , subjected to jππ πππ π πσ ΙΠΠ Ι ΙΙ
= − =v v (8.8)
and can obtained iteratively. Here,
( ) ~1A A A A Aππ ππ π πσ
ΠΠ Ι ΙΙ Ι≡ − (8.9)
and, with aπ as the projection-matrix into ( )rW π ,
j aπ π≡ Ι − (8.10)
We observe that the computation in parallel of the action of 1A−
ΙΙ is straightforward
because
( ) 11
1
E
A Aα
α
−−
ΙΙ ΙΙ=
= ∑ (8.11)
Once ( )rWπ π∈v has been obtained, to derive Ιv one can apply:
( )1A w A ππ
−Ι ΙΙΙ Ι= −v v (8.12)
This completes the evaluation of S .
8.3- APPLICATION OF S -1

Ismael Herrera and Alberto Rosas Medina
20
We define
Σ ≡ Ι ∪ ∆ (8.13)
A property that is relevant for the following discussion is:
( ) ( )rW WΣ = Σ (8.14)
Therefore, the matrix 1A− can be written as:
( ) ( )( ) ( )
( ) ( )( ) ( )
1 11 1
1
1 1 1 1
A AA AA
A A A Aπ
π ππ
− −− −
− ΣΣ ΣΠΠ Π∆
− − − −
∆Π ∆∆ Σ
= =
(8.15)
Then, :S W W∆ ∆→ fulfills
( )1 1S A− −
∆∆= (8.16)
For any w W∈ , let us write
1A w−≡v (8.17)
Then, πv fulfills
( ) ( ) 10t rA w A A w , subjected to jπ πππ π π
σ−
ΣΣ ΣΣ= − =v v (8.18)
Here, r rj a≡ Ι − , where the matrix ra is the projection operator on rW , while
( ) ( ) 1tA A A A Aππ ππ π πσ
−
Σ ΣΣ Σ≡ − (8.19)
Furthermore, we observe that
( ) ( )1 1
1
EtA Aα
α
− −
ΣΣ ΣΣ=
= ∑ (8.20)
Eq.(8.18) is solved iteratively. Once πv has been obtained, we apply:
( ) ( )1tA w A ππ
−
Σ ΣΣΣ Σ= −v v (8.21)
This procedure permits obtaining 1A w− in general; however, what we need only is
( )1A w−
∆∆. We observe that
( ) ( )1 1A w A w− −∆∆∆ ∆
= (8.22)

Four General Purposes Massively Parallel DDM Algorithms.
21 Memorias GMMC 2012 - 7
The vector 1A w−∆ can be obtained by the general procedure presented above.
Thus, take w w W W∆∆≡ ∈ ⊂ and
1A w−∆≡v (8.23)
Therefore,
( ) ( )1 1t t t rA A A A aπ ππ π
− −
Ι ∆ Σ ΣΣ Σ ΣΣ Σ+ = = − = −v v v v v (8.24)
Using Eq.(8.20), these operations can be fully parallelized. However, the detailed
discussion of such procedures will be presented separately [ ].
8.4- APPLICATION OF a AND j .
We use the notation
( )( )( ), ,i ja a α β= (8.25)
Then [10]:
( )( ) ( ) ( ) ( ), ,1 ,iji ja i and j
m iα β δ α β= ∀ ∈Ζ ∀ ∈Ζ (8.26)
While
j a= Ι − (8.27)
Therefore,
,jw w aw for every w W= − ∈ (8.28)
As for the right hand-sides of Eqs.(7.4), (7.6), (7.8) and (7.10), all they can be
obtained by successively applying to f∆ some of the operators that have already
been discussed. Recalling Eq.(7.3), we have
( ) ( )1f R f A A R f−
∆ ∆Π ΠΠ∆ Π≡ −
(8.29)
The computation of R f
does present any difficulty and the evaluation of the
actions of 1A−
ΠΠ and A
∆Π were already analyzed.

Ismael Herrera and Alberto Rosas Medina
22
Equation Section 9 9- NUMERICAL RESULTS
All the partial differential equations treated had the form:
( )
2
1
( ) ( )
,d
i ii
a u b u cu f x xu g x x
α β=
− ∇ + ⋅∇ + = ∈Ω= ∈∂Ω
Ω =∏
(9.1)
where , 0a c > are constants, while 1 dim( ,..., )b b b= is a constant vector and
dim 2,3= . The family of subdomains 1,..., EΩ Ω is assumed to be a partition of the
set 1,..., dΩ ≡ of original nodes (this count does not include the nodes that lie on
the external boundary). In the applications we present, n is equal to the number of
degrees of freedom (dof) of the original problem; we use linear functions and only
one of them is associated with each original node. As for the original problems
treated, they have the standard form of Eq.(3.1):
A u f⋅ =
(9.2)
They were obtained by discretization of three different differential equations, in two
and three dimensions, of the above boundary value problem with 1a = . Choosing
0b = symmetric matrices were obtained, which correspond to the choices 1c =
and to 0c = , respectively; in this latter case, the differential operator treated is the
Laplacian. The choices ( )1,1b = and ( )1,1,1b = , with 0c = , yield non-symmetric
matrices.
As for the right-hand side, the following choices were made:
• For the Laplacian operator
( ) ( )( ) ( ) ( )
sin sin
sin sin sin
f n x n y , in 2D
f n x n y n z , in 3 D
π π
π π π
≡
≡ (9.3)
• Other differential operators
( ) ( ) ( ) ( )
2 2
3 2 2
exp 1
exp 2
f xy x y , in 2D
f xyz yz xyz x y z , in 3D
≡ − −
≡ + + + (9.4)

Four General Purposes Massively Parallel DDM Algorithms.
23 Memorias GMMC 2012 - 7
Discretization was accomplished using central finite differences, but streamline
artificial viscosity was incorporated in the treatment when 0b ≠ . The DQGMRES
algorithm [33] was implemented for the iterative solution of the non-symmetric
problems. The restrictions used were continuity on the primal nodes. The
numerical results that were obtained are reported in six tables that follow. Tables 1
to 3 refer to 2D problems while Tables 4 to 6 to 3D problems.
TABLE 1 Symmetric 2-D Eps=1 e-6 Subdomains Dof Primal DVS-BDDC Primal #2 DVS-FETI-DP Dual #2
2x2 X 2x2 4 9 1 2 1 2 1 4x4 X 4x4 16 225 9 7 7 6 5 6x6 X 6x6 36 1225 25 9 9 7 6 8x8 X 8x8 64 3969 49 10 10 9 7
10x10 X 10x10 100 9801 81 11 11 10 8 12x12 X 12x12 124 20449 121 12 11 13 9 14x14 X 14x14 196 38025 169 12 12 13 12 16x16 X 16x16 256 65025 225 13 12 14 12 18x18 X 18x18 324 104329 289 13 13 15 13 20x20 X 20x20 400 159201 361 13 13 15 14 22x22 X 22x22 484 233289 441 13 14 15 16 24x24 X 24x24 576 330625 529 14 14 15 15 26x26 X 26x26 676 455625 625 14 14 15 15 28x28 X 30X30 784 613089 729 14 14 15 15 30x30 X 30x30 900 808201 841 15 14 15 15
TABLE 2
Non-Symmetric 2-D Eps=1 e-6 Subdomains Dof Primal DVS-BDDC Primal #2 DVS-FETI-DP Dual #2
2x2 X 2x2 4 9 1 2 1 2 1 4x4 X 4x4 16 225 9 8 6 6 6 6x6 X 6x6 36 1225 25 10 8 8 7 8x8 X 8x8 64 3969 49 12 10 9 9
10x10 X 10x10 100 9801 81 13 12 9 10 12x12 X 12x12 124 20449 121 14 12 10 11 14x14 X 14x14 196 38025 169 15 13 11 11 16x16 X 16x16 256 65025 225 15 14 11 12 18x18 X 18x18 324 104329 289 16 14 11 12 20x20 X 20x20 400 159201 361 16 15 12 12 22x22 X 22x22 484 233289 441 17 16 12 12 24x24 X 24x24 576 330625 529 17 16 12 13 26x26 X 26x26 676 455625 625 17 16 13 13 28x28 X 30X30 784 613089 729 18 17 13 13 30x30 X 30x30 900 808201 841 18 17 13 13

Ismael Herrera and Alberto Rosas Medina
24
TABLE 3 Laplacian 2-D Eps=1 e-6 Subdomains Dof Primal DVS-BDDC Primal #2 DVS-FETI-DP Dual #2
2x2 X 2x2 4 9 1 1 1 1 1 4x4 X 4x4 16 225 9 4 3 5 5 6x6 X 6x6 36 1225 25 7 6 6 8 8x8 X 8x8 64 3969 49 7 7 7 7
10x10 X 10x10 100 9801 81 8 8 9 8 12x12 X 12x12 124 20449 121 8 9 10 9 14x14 X 14x14 196 38025 169 9 9 10 9 16x16 X 16x16 256 65025 225 9 9 10 9 18x18 X 18x18 324 104329 289 9 9 10 9 20x20 X 20x20 400 159201 361 9 9 10 10 22x22 X 22x22 484 233289 441 9 9 10 10 24x24 X 24x24 576 330625 529 10 9 11 10 26x26 X 26x26 676 455625 625 10 9 11 11 28x28 X 30X30 784 613089 729 10 10 11 11 30x30 X 30x30 900 808201 841 10 10 11 11
TABLE 4 Symmetric 3-D Eps 1 e-6 Number of Iterations Partition Subdomains Dof Primals DVS-BDDC Primal #2 DVS-FETI-DP Dual #2 (2x2x2) X (2x2x2) 8 27 7 2 2 2 2 (3x3x3) X (3x3x3) 27 512 80 4 4 3 3 (4x4x4) X (4x4x4) 64 3375 351 5 5 4 3 (5x5x5) X (5x5x5) 125 13824 1024 6 5 4 3 (6x6x6) X (6x6x6) 216 42875 2375 6 6 4 4 (7x7x7) X (7x7x7) 343 110592 4752 7 6 4 4 (8x8x8) X (8x8x8) 512 250047 8575 8 7 5 6 (9x9x9) X (9x9x9) 8019 512000 14336 8 8 7 7 (10x10x10) X (10x10x10) 10000 970299 22599 8 8 8 8
TABLE 5 Non-Symmetric 3-D Eps 1 e-6 Number of Iterations Partition Subdomains Dof Primals DVS-BDDC Primal #2 DVS-FETI-DP Dual #2 (2x2x2) X (2x2x2) 8 27 7 3 2 2 2 (3x3x3) X (3x3x3) 27 512 80 6 4 4 4 (4x4x4) X (4x4x4) 64 3375 351 7 6 5 5 (5x5x5) X (5x5x5) 125 13824 1024 8 7 5 5 (6x6x6) X (6x6x6) 216 42875 2375 10 7 6 6 (7x7x7) X (7x7x7) 343 110592 4752 11 8 6 6 (8x8x8) X (8x8x8) 512 250047 8575 11 9 7 7 (9x9x9) X (9x9x9) 8019 512000 14336 12 10 8 8 (10x10x10) X (10x10x10) 10000 970299 22599 13 11 9 9
TABLE 6
Laplacian 3-D Eps 1 e-6 Number of Iterations Partition Subdomains Dof Primals DVS-BDDC Primal #2 DVS-FETI-DP Dual #2 (2x2x2) X (2x2x2) 8 27 7 1 1 1 1 (3x3x3) X (3x3x3) 27 512 80 3 2 2 2 (4x4x4) X (4x4x4) 64 3375 351 1 1 2 2

Four General Purposes Massively Parallel DDM Algorithms.
25 Memorias GMMC 2012 - 7
(5x5x5) X (5x5x5) 125 13824 1024 5 4 5 4 (6x6x6) X (6x6x6) 216 42875 2375 6 6 5 6 (7x7x7) X (7x7x7) 343 110592 4752 6 6 6 6 (8x8x8) X (8x8x8) 512 250047 8575 7 7 8 8 (9x9x9) X (9x9x9) 8019 512000 14336 8 9 9 9 (10x10x10) X (10x10x10) 10000 970299 22599 10 10 10 10
Equation Section 10
10.- CONCLUSIONS In this article, numerical tests were carried out for each one of the preconditioned
DVS-algorithms with constraints [8]:
a).- The DVS-version of BDDC, Eq.(8.1);
b).-The DVS-version of FETI-DP, Eq.(8.2);
c).- DVS-primal formulation #2, Eq.(8.3);
d).- DVS-dual formulation #2, Eq.(8.4).
Each one of these algorithms is applicable to symmetric-definite, indefinite and
non-symmetric problems [8].
In the sequence of numerical experiments that was carried out all they have
exhibited equivalent efficiencies. Furthermore, in two previous paper [9,10] the
DVS-versions of BDDC and FETI-DP, were compared with standard versions
BDDC and FETI-DP and it was shown that they are, at least, as efficient as them.
Thus, the results of the present paper indicate that each one of the four
preconditioned DVS-algorithms here discussed has efficiency comparable with the
best non-overlapping DDM available at present. Thus, another important
conclusion of this paper is that the four preconditioned DVS-algorithms with
constraints studied in this paper numerically have update efficiency. This fact,
together with their excellent parallelization properties indicate that they are very
suitable as a tool to be used in the construction of massively-parallelized software
that is needed for efficiently programming the most powerful parallel computers
available at present.
REFERENCES

Ismael Herrera and Alberto Rosas Medina
26
1. DDM Organization, Proceedings of 20 International Conferences on Domain Decomposition Methods. www.ddm.org, 1988-2009.
2. Toselli A. and O. Widlund, Domain decomposition methods- Algorithms and Theory, Springer Series in Computational Mathematics, Springer-Verlag, Berlin, 2005, 450p.
3. Dohrmann C.R., A preconditioner for substructuring based on constrained energy minimization. SIAM J. Sci. Comput. 25(1):246-258, 2003.
4. Mandel J. and C. R. Dohrmann, Convergence of a balancing domain decomposition by constraints and energy minimization, Numer. Linear Algebra Appl., 10(7):639-659, 2003.
5. Mandel J., Dohrmann C.R. and Tezaur R., An algebraic theory for primal and dual substructuring methods by constraints, Appl. Numer. Math., 54: 167-193, 2005.
6. Da Conceição, D. T. Jr., Balancing domain decomposition preconditioners for non-symmetric problems, Instituto Nacional de Matemática Pura e Aplicada, Agencia Nacional do Petróleo PRH-32, Rio de Janeiro, May. 9, 2006.
7. Widlund O., Personal communication, 2010. 8. Herrera, I., Carrillo-Ledesma A. & Rosas-Medina Alberto “A Brief Overview of
Non-overlapping Domain Decomposition Methods”, Geofisica Internacional, Vol. 50(4), pp 445-463, 2011.
9. Herrera, I. & Yates R. A. The Multipliers-Free Dual Primal Domain Decomposition Methods for Nonsymmetric Matrices NUMER. METH. PART D. E. 2009, DOI 10.1002/Num. 20581, (Published on line April 28, 2010).
10. Herrera, I. & Yates R. A. The Multipliers-free Domain Decomposition Methods NUMER. METH. PART D. E. 26: 874-905 July 2010, DOI 10.1002/num. 20462. (Published on line Jan 28, 2009)
11. Herrera I. and R. Yates “Unified Multipliers-Free Theory of Dual-Primal Domain Decomposition Methods. NUMER. METH. PART D. E. Eq. 25:552-581, May 2009, (Published on line May 13, 08) DOI 10.1002/num. 20359.
12. Herrera, I. “New Formulation of Iterative Substructuring Methods without Lagrange Multipliers: Neumann-Neumann and FETI”, NUMER METH PART D E 24(3) pp 845-878, 2008 (Published on line Sep 17, 2007) DOI 10.1002 NO. 20293.
13. Herrera, I. “Theory of Differential Equations in Discontinuous Piecewise-Defined-Functions
14. Brenner S. and Sung L. BDDC and FETI-DP without matrices or vectors Comput. Methods Appl. Mech. Engrg. 196(8): 1429-1435. 2007.
”, NUMER METH PART D E, 23(3), pp 597-639, 2007 DOI 10.1002 NO. 20182.
15. Mandel J. Balancing domain decomposition, Commun. Numer. Methods Engrg. 1(1993) 233-241.
16. Mandel J. and Brezina M. Balancing domain decomposition for problems with large jumps in coefficients. Math. Comput. 65, pp 1387-1401, 1996.
17. Farhat Ch., and Roux F. A method of finite element tearing and interconnecting and its parallel solution algorithm. Internat. J. Numer. Methods Engrg. 32:1205-1227, 1991.
18. Mandel J. and Tezaur R. Convergence of a substructuring method with Lagrange multipliers. Numer. Math 73(4): 473-487, 1996

Four General Purposes Massively Parallel DDM Algorithms.
27 Memorias GMMC 2012 - 7
19. Farhat C., Lessoinne M. LeTallec P., Pierson K. and Rixen D. FETI-DP a dual-primal unified FETI method, Part I: A faster alternative to the two-level FETI method. Int. J. Numer. Methods Engrg. 50, pp 1523-1544, 2001.
20. Farhat C., Lessoinne M. and Pierson K. A scalable dual-primal domain decomposition method, Numer. Linear Algebra Appl. 7, pp 687-714, 2000.
21. Mandel J. and Tezaur R., On the convergence of a dual-primal substructuring method, SIAM J. Sci. Comput., 25, pp 246-258, 2001.
22. Cai, X-C. & Widlund, O.B., Domain Decomposition Algorithms for Indefinite Elliptic Problems, SIAM J. Sci. Stat. Comput. 1992, Vol. 13 pp. 243-258
23. Farhat C., and Li J. An iterative domain decomposition method for the solution of a class of indefinite problems in computational structural dynamics. ELSEVIER Science Direct Applied Numerical Math. 54 pp 150-166. 2005.
24. Li J. and Tu X. Convergence analysis of a Balancing Domain Decomposition method for solving a class of indefinite linear systems. Numer. Linear Algebra Appl. 2009; 16:745–773
25. Tu X. and Li J., A Balancing Domain Decomposition method by constraints for advection-diffusion problems. www.ddm.org/DD18/