grupo d 5 de febrero de 2001 apellidos: d.n.i.:...
TRANSCRIPT

ECUACIONES DIFERENCIALES I Grupo D 5 de febrero de 2001
Apellidos: D.N.I.:
Nombre: Firma:
1. i) Resolver la ecuacion x y′ = (1 − x) y + x2.
ii) Para todo (x0, y0) ∈ R2, estudiar la existencia y unicidad de las soluciones de la ecuacion que cumplen lacondicion inicial y(x0) = y0. [2 puntos]
i) Se trata de una ecuacion lineal de primer orden. La solucion de la ecuacion homogenea y′ =(
1x − 1
)
y (con
x 6= 0) es
log |y| =
∫ (
1
x− 1
)
dx = log |x| − x + c1 =⇒ y = c x e−x (c ∈ R) .
La solucion general de la ecuacion completa se obtiene por variacion de constantes:
y = c(x)x e−x =⇒ c′(x)x e−x + c(x)(
e−x − x e−x)
= (1 − x) c(x) e−x + x ⇐⇒ c′(x) = ex ⇐⇒ c(x) = ex + c0
=⇒ y(x) = x (1 + c0 e−x) (c0 ∈ R) .
ii) Los coeficientes de la ecuacion lineal propuesta a(x) = 1−xx
y b(x) = x son C∞ en R−{0}. Por el teoremade existencia y unicidad para ecuaciones lineales, para todo x0 6= 0 existe una solucion unica para el problemade valor inicial con dato inicial y(x0) = y0, definida en el la semirrecta (0,∞) (si x0 > 0) o (−∞, 0) (si x0 < 0).Si el dato inicial es y(0) = y0, no se puede aplicar el teorema de existencia y unicidad, ya que el coeficientea(x) es discontinuo (tiene lımite infinito) en el origen. Esta claro que hay infinitas soluciones de la ecuaciondiferencial que cumplen la condicion inicial y(0) = 0, ya que de hecho todas las soluciones calculadas en elapartado anterior cumplen esta condicion. Si y0 6= 0, podemos estudiar la existencia y unicidad de solucionesdel problema
dx
dy=
x
(1 − x)y + x2, x(y0) = 0 .
Como el denominador del miembro derecho no se anula en (0, y0) si y0 6= 0, el teorema de existencia y unicidadgarantiza la existencia y unicidad local de este problema de valor inicial. Al ser obviamente x(y) = 0 solucion,el eje y es la unica curva integral de la ecuacion que pasa por el punto (0, y0) con y0 6= 0.

2. Considerese el sistema y′ = Ay + f(x), con c ∈ R, y ∈ R4,
A =
0 0 1 0c 0 0 −1
−1 2c 0 00 1 2c −2c
, f(x) =
0secxcscx
0
.
i) Para c = 0, calcular una matriz fundamental Φ(x) del sistema homogeneo que cumpla Φ(0) = 1I.
ii) Para c = 0, hallar una solucion particular del sistema completo.
iii) Encontrar todos los valores de c para los cuales el sistema es asintoticamente estable. [3 puntos]
i) Φ(x) = exA, siendo
A =
0 0 1 00 0 0 −1
−1 0 0 00 −1 0 0
.
El polinomio caracterıstico de esta matriz es
pA(λ) = (λ2 + 1)2 = (λ + i)2(λ − i)2 .
El polinomio mınimo φA(λ) tiene que ser de la forma φA(λ) = (λ+i)r1 (λ−i)r2 , con ri ≥ 1 (el polinomio mınimodivide al caracterıstico, y ademas contiene todos los factores lineales que aparezcan en este ultimo polinomio).Como A2 + 1 = 0, y el polinomio mınimo es el polinomio monico de menor grado que es polinomio anuladorde la matriz A, concluımos que φA(λ) = λ2 +1. (Esto tambien se podrıa haber demostrado verificando que losautovalores λ = ±i tienen ambos multiplicidad geometrica 2, o equivalentemente que las matrices A± i tienenrango 2.) Por tanto (metodo del polinomio anulador) exA = α + βA , donde α, β ∈ C se determinan a travesde las ecuaciones
ei x = α + i β , e−i x = α − i β .
Sumando y restando estas ecuaciones obtenemos α = 12 (eix + e−ix) = cosx, β = 1
2i(eix − e−ix) = sen x, y por
tanto
Φ(x) = exA = cosx + sen xA =
cosx 0 sen x 00 cosx 0 − senx
− senx 0 cosx 00 sen x 0 cosx
.
ii) Segun el metodo de variacion de constantes, buscamos la solucion del sistema completo en la forma y(x) =exA c(x), siendo c : R → R4 una funcion vectorial. Sustituyendo en el sistema obtenemos
exA c′(x) + A exA c(x) = A exA c(x) + f(x) ⇐⇒ c′(x) = e−xA f(x) = Φ(−x) f(x) =
−11
cotx− tan x
.
Integrando obtenemos
c(x) =
−xx
log |sen x|log |cosx|
+ c0 =⇒ y(x) = exA c0 + exA
−xx
log |senx|log |cosx|
= exA c0 +
−x cosx + sen x log |sen x|x cosx − sen x log |cosx|x sen x + cosx log |sen x|x sen x + cosx log |cosx|
,
siendo c0 ∈ R4 un vector constante. Esta es la solucion general del sistema homogeneo; una solucion particularse obtiene, por ejemplo, tomando c0 = 0.

iii) El polinomio caracterıstico de la matriz A (para c ∈ R arbitrario) es igual a
pA(λ) = λ4 + 2c λ3 + 2λ2 + 2c(c + 1)λ + 1 − 4c3 ,
y el sistema sera asintoticamente estable si y solo si todas las raıces de este polinomio tienen parte real negativa.La condicion necesaria y suficiente de estabilidad asintotica (criterio de Routh–Hurwitz) es que sean positivostodos los menores principales de la matriz
2c 1 0 02c(c + 1) 2 2c 1
0 1 − 4c3 2c(c + 1) 20 0 0 1 − 4c3
.
Calculando los menores principales de esta matriz obtenemos las condiciones
c > 0 ; 2c(1−c) > 0 =⇒ c < 1 ; 4c4(4c−1) > 0 =⇒ c >1
4; 4c4(4c−1)(1−4c3) > 0 =⇒ c < 1/
3√
4 .
Por tanto, el sistema sera asintoticamente estable si y solo si 14 < c < 1
3√
4.

3. i) Estudiar si la ecuacion xu′′ − u′ + 4x3u = 0 tiene alguna solucion no trivial que se anule en x = 0, y sies ası hallar su desarrollo en serie de potencias de x y expresarla en terminos de funciones elementales.
ii) Hallar la solucion general de la ecuacion. [2.5 puntos]
La ecuacion dada es una ecuacion lineal homogenea de segundo orden con un punto singular en el origen.Dicha ecuacion se puede escribir
x2u′′ + x p(x)u′ + q(x)u = 0 ,
siendo p(x) = −1 y q(x) = 4x4 funciones analıticas en x = 0 (polinomios). Por tanto, el origen es un puntosingular regular. La ecuacion indicial en dicho punto es
r(r − 1) + p(0)r + q(0) = r(r − 1) − r = r(r − 2) = 0 ,
con raıces r1 = 2 > r2 = 0 cuya diferencia r1 − r2 = 2 es un entero. Por el teorema de Frobenius, cualquiersolucion u(x) de la ecuacion es una combinacion lineal u(x) = λ1 u1(x) + λ2 u2(x) de las dos soluciones
u1(x) = x2∞∑
i=0
ci xi ,
u2(x) = a u1(x) log |x| +∞∑
i=0
di xi ,
con c0 = d0 = 1 y a ∈ R una constante que puede ser igual a cero. Como limx→0
x2 log |x| = 0, independientemente
del valor de a se cumple
limx→0
u(x) = λ1 limx→0
u1(x) + λ2 limx→0
u2(x) = 0 + λ2 d0 = λ2.
Por tanto, la condicion necesaria y suficiente para que u(x) se anule en el origen es que λ2 = 0, es decir queu(x) sea proporcional a la solucion u1(x). Para calcular los coeficientes ci de la serie que representa a estasolucion sustituimos dicha serie en la ecuacion diferencial, obteniendo
∞∑
i=0
(i+2)(i+1) ci xi −∞∑
i=0
(i+2) ci xi +4
∞∑
i=0
ci xi+4 = 3c1 x+8c2 x2 +15c3 x3 +
∞∑
i=4
[i(i + 2)ci + 4ci−4]xi = 0 .
Igualando a cero los coeficientes de las potencias de x se llega a las siguientes ecuaciones:
c1 = c2 = c3 = 0
i(i + 2)ci + 4ci−4 = 0 , i = 4, 5, . . . .
Como la relacion de recurrencia que acabamos de hallar relaciona el coeficiente ci con el ci−4 (notese quei(i + 2) 6= 0 para i = 4, 5, . . .), de la primera de las ecuaciones anteriores se deduce que
c4k+1 = c4k+2 = c4k+3 = 0 , k = 0, 1, . . . .
Los unicos coeficientes no nulos son por tanto los de ındice multiplo de 4, es decir los de la forma c4k conk = 0, 1, . . .. Llamando bk = c4k y sustituyendo en la relacion de recurrencia se obtiene
bk = − 4
4k(4k + 2)bk−1 = − 1
(2k + 1)2kbk−1 , k = 1, 2, . . . ,
de donde se sigue que
bk =−1
(2k + 1)(2k)
−1
(2k − 1)(2k − 2)· · · −1
3 · 2 b0 =(−1)k
(2k + 1)!, k = 1, 2, . . . ,

ya que b0 = c0 = 1. Por tanto la solucion buscada es
u1(x) = x2∞∑
k=0
c4k x4k =
∞∑
k=0
bk x4k+2 =
∞∑
k=0
(−1)k
(2k + 1)!x2(2k+1) = sen(x2) .
ii) Una vez conocida explıcitamente una solucion no trivial de una ecuacion lineal homogenea de segundo ordense puede calcular una segunda solucion linealmente independiente aplicando la formula del wronskiano:
sen(x2)
∫ x e−∫
t
(− 1
s)ds
sen(t2)dt = sen(x2)
∫ x t dt
sen2(t2)=
1
2sen(x2)
∫ x2
ds
sen2 s= −1
2sen(x2) cot(x2)
= −1
2cos(x2) .
La solucion general de la ecuacion dada es por tanto
u(x) = λ1 sen(x2) + λ2 cos(x2) , λ1, λ2 ∈ R .

4. Dado el sistema dinamico x = 1 + y − x2, y = 2xy, se pide:
i) Clasificar sus puntos crıticos.
ii) Resolver la ecuacion diferencial de las orbitas.
iii) Dibujar aproximadamente el mapa de fases del sistema. [2.5 puntos]
i) Los puntos crıticos del sistema son las soluciones (x, y) del sistema de ecuaciones f(x, y) = g(x, y) = 0,donde f(x, y) = 1 + y − x2, g(x, y) = 2xy. De la ecuacion 2xy = 0 se sigue que o bien x = 0 o bien y = 0.Si x = 0 sustituyendo en la otra ecuacion se obtiene y = −1, mientras que si y = 0 la primera ecuacion seconvierte en x2 = 1, cuyas soluciones son x = ±1. Por tanto los puntos crıticos son (0,−1) y (±1, 0). Paraestudiar la naturaleza de estos puntos, calculamos la matriz jacobiana del sistema
D(f, g)(x, y) =
(
−2x 12y 2x
)
.
En el punto crıtico (0,−1) la matriz jacobiana es igual a
A =
(
0 1−2 0
)
,
con invariantes τ = trA = 0 y δ = det A = 2. Como τ2 − 4δ = −8 < 0 y τ = 0, la aproximacion linealal sistema en el punto crıtico (0,−1) tiene un centro en el origen. Por tanto el punto (0,−1) es o bien uncentro o bien un foco del sistema dado (al ser f y g polinomios, y por tanto funciones analıticas). Al serf(−x, y) = f(x, y) y g(x, y) = −g(x, y), el mapa de fases del sistema es simetrico respecto del eje y, al quepertenece el punto (0,−1), por lo que dicho punto es un centro. Ademas, como f(0, y) = 1 + y es mayor quecero para y > −1, las orbitas cerradas del sistema que engloban al centro (0,−1) estan recorridas en sentidohorario. En los otros puntos crıticos (±1, 0) la matriz jacobiana del sistema es
B =
(
∓2 10 ±2
)
,
con autovalores ±2 reales y de signos opuestos. Por tanto, estos puntos crıticos son puntos de silla. Por lasimetrıa del mapa de fases respecto del eje y, basta estudiar el comportamiento del sistema en las proximidadesde uno de estos dos puntos crıticos, por ejemplo (1, 0). Los autovectores de la matriz jacobiana correspondientea este punto son (1, 0) para el autovalor −2 y (1, 4) para el autovalor 2. Por lo tanto, la orbita que “sale” delpunto crıtico (1, 0) (autovalor positivo 2) es tangente a la recta y = 4x, mientras que la orbita que “entra” enel punto crıtico (autovalor negativo −2) es tangente a la recta y = 0. De hecho, esta ultima orbita coincideexactamente con la recta y = 0, porque y = 0 es una orbita del sistema (sustituyendo y = 0 en las ecuacionesdiferenciales del sistema queda una ecuacion en x solamente: x = 1 − x2).
ii) La ecuacion diferencial de las orbitas es
dy
dx=
2xy
1 + y − x2,
que se puede escribir(1 + y − x2)y′ − 2xy = 0 .
Al ser ∂∂x
(1 + y − x2) = −2x = ∂∂y
(−2xy), la ecuacion es exacta y su solucion general es φ(x, y) = c (c ∈ R),
siendo φ cualquier funcion tal que φx = −2xy y φy = 1 + y − x2. Integrando la primera de estas ecuaciones seobtiene φ(x, y) = −x2y + h(y), y sustituyendo en la segunda queda φy = −x2 + h′(y) = 1 + y − x2 =⇒ h(y) =y + 1
2y2 + const. Por tanto, la solucion general de la ecuacion de las orbitas es
y2 + 2y(1 − x2) = c , c ∈ R .
(Otra forma algo mas larga de llegar a esta solucion es darse cuenta de que la ecuacion diferencial para x(y)es una ecuacion de Bernoulli.)

iii) Para dibujar el mapa de fases del sistema, podemos utilizar la informacion acerca de los puntos crıticosdeducida en el apartado i) y el hecho de que la recta y = 0 es una orbita, y por tanto ninguna otra orbita delsistema puede cortar el eje x excepto la separatriz que pasa por los puntos de silla (±1, 0). Las separatricesse calculan facilmente utilizando la ecuacion de las orbitas hallada en el apartado anterior. La constante c sedetermina imponiendo que (±1, 0) pertenezca a la separatriz, lo cual proporciona c = 0. Por tanto la ecuacionde las separatrices es y(y + 2 − 2x2) = 0, es decir la recta y = 0 y la parabola vertical y = 2x2 − 2 (en rojo enla figura). Teniendo en cuenta que las orbitas tampoco pueden cortar a la separatriz y = 2x2 − 2 (excepto laotra separatriz y = 0) y estudiando los signos de x e y (en particular, notese que las orbitas tienen pendientehorizontal cuando cortan la recta x = 0, ya que g(0, y) = 0) se llega facilmente al mapa de fases de la figura.
(0,−1)
(−1, 0) (1, 0)

ECUACIONES DIFERENCIALES I Grupo D 19 de septiembre de 2001
Apellidos: D.N.I.:
Nombre: Firma:
1. Resolver la ecuacion de Bernoulli y′ =3
x
(
y − y2/3)
. Precisar cuantas soluciones de la ecuacion satisfacen:
i) y(−1) = 1; ii) y(0) = 1; iii) y(1) = 0.
La ecuacion dada es de variables separadas pero, al ser tambien una ecuacion de Bernoulli, es mas sencilloresolverla mediante el cambio z = y1− 2
3 = y1
3 . Como y = z3 tenemos
y′ = 3z2 z′ =3
x(z3 − z2) ⇐⇒ z = 0 o z′ =
1
x(z − 1) .
Esta ultima ecuacion es una ecuacion lineal inhomogenea en z, pero ahora es mas facil resolverla como unaecuacion de variables separadas:
z′
z − 1=
1
x⇐⇒ log |z − 1| = log |x| + c0 (c0 ∈ R) ⇐⇒ z − 1 = c x (c = ±ec0 ∈ R) ⇐⇒ y = (1 + c x)3 .
Notese que la expresion anterior contiene de hecho la solucion z = 1, es decir y = 1, que se pierde al dividir porz − 1, pero no contiene la solucion z = 0, es decir y = 0, perdida al dividir por z2. Luego la solucion generalde la ecuacion propuesta es
y = 0 o y = (1 + c x)3 , c ∈ R .
En la figura que aparece a continuacion se representan algunas de las soluciones de la ecuacion propuesta.
-4 -2 2 4
-2
2
4
y = 1
(1, 0)
(−1, 1)
y = (1 + c x)3 (c < 0) y = (1 + c x)3 (c > 0)
i) En el punto (−1, 1) la funcion f(x, y) = 3x
(
y − y2/3)
es C∞, y por tanto localmente lipschitziana en unentorno de (−1, 1). Por el teorema de existencia y unicidad, existe localmente una unica solucion de laecuacion dada que satisface la condicion inicial y(−1) = 1. Esta solucion es la solucion constante y(x) = 1, yaque es solucion (c = 0) y satisface la condicion inicial.

ii) En el punto (0, 1) f no es continua, y por tanto tampoco es lipschitziana. Esto implica que no se puedeaplicar el teorema de existencia y unicidad en este punto. De hecho, todas las soluciones de la forma y(x) =(1+ c x)3 satisfacen la condicion y(0) = 1. Luego en este caso hay infinitas soluciones del problema de valorinicial propuesto.
iii) La solucion y(x) = 0 satisface la condicion inicial pedida, ası como la solucion y(x) = (1 − x)3. De hecho,dado que toda solucion de la forma y(x) = (1 + c x)3 es tangente al eje x en el punto x = −c−1, hay infinitas
soluciones que satisfacen la condicion inicial propuesta. Por ejemplo,
y(x) =
{
0 , si x ≤ 2(
1 − 12 x
)3, si x ≥ 2
es una solucion de la ecuacion (de clase C2) definida para todo x que satisface la condicion inicial de esteapartado. Por el teorema de unicidad, la funcion f no puede ser localmente lipschitziana en un entorno de(1, 0). (Es evidente que f no es C1 en un entorno de este punto, ya que y2/3 no es C1 en un entorno de 0.)
2. Considerese la ecuacion u′′′ + a u′′ + 3u′ + 9u = ex, con a ∈ R.
i) Hallar su solucion general para a = −5.
ii) Determinar su estabilidad en funcion del parametro a.
i) Se trata de una ecuacion lineal inhomogenea de tercer orden con coeficientes constantes y polinomio carac-terıstico p(λ) = λ3 + a λ2 + 3λ + 9. Para a = −5, p(λ) tiene la solucion entera λ = −1, por lo que dividiendopor λ + 1 podemos factorizar facilmente dicho polinomio:
a = −5 =⇒ p(λ) = (λ + 1)(λ2 − 6λ + 9) = (λ + 1)(λ − 3)2 .
La solucion general de la ecuacion homogenea es por tanto
y(x) = c1 e−x + e3x(c2 + c3 x) , ci ∈ R .
Como en este caso 1 no es raız de p(λ), hay una solucion particular de la ecuacion inhomogenea de la formay(x) = b ex. Para determinar el parametro b sustituimos dicha solucion en la ecuacion inhomogenea, obteniendo
b ex(1 − 5 + 3 + 9) = 8b ex = ex ⇐⇒ b =1
8.
Por tanto, la solucion general de la ecuacion propuesta es
y(x) =1
8ex + c1 e−x + e3x(c2 + c3 x) , ci ∈ R .
ii) Lo mas sencillo es aplicar el criterio de Routh–Hurwitz al polinomio p(λ). El determinante de Routh–Hurwitz es en este caso
∣
∣
∣
∣
∣
∣
a 1 09 3 a0 0 9
∣
∣
∣
∣
∣
∣
,
y sus menores principales son por tanto
a , 3(a − 3) , 27(a − 3) .
Por tanto la ecuacion propuesta es asintoticamente estable si a > 3, dado que en este caso todos los menoresanteriores son positivos, y es inestable si a < 3, dado que en este caso los dos ultimos menores son negativos.Si a = 3, lo mas sencillo es notar que en este caso p(λ) = λ3 + 3λ2 + 3λ + 9 = (λ + 1)3 + 8 tiene la raız realλ = −3. Dividiendo por λ+3 se obtiene p(λ) = (λ+3)(λ2 +3), y por tanto las raıces de p(λ) son −3 y ±i
√3.
No hay ninguna raız con parte real positiva, y las raıces con parte real cero son simples. Por tanto, para a = 3la ecuacion es estable, pero no asintoticamente estable.

3. Hallar una solucion no nula de la ecuacion 2x2 u′′ + x(x + 1)u′ − (2x + 1)u = 0 que sea analıtica en x = 0.¿Estan acotadas todas las soluciones de dicha ecuacion en un entorno del origen?
La ecuacion dada es una ecuacion lineal homogenea de segundo orden, con un punto singular en x = 0. Paradeterminar el caracter de esta singularidad, basta notar que la ecuacion es de la forma
x2u′′ + x p(x)u′ + q(x) = 0 , con p(x) =1
2(x + 1) , q(x) = −1
2(2x + 1)
analıticas (polinomicas) en el origen. Por tanto, x = 0 es un punto singular regular de la ecaucion propuesta.Al ser p(0) = 1/2 y q(0) = −1/2, la ecuacion indicial en el origen es
r(r − 1) +r
2− 1
2=
1
2(2r2 − r − 1) = 0 ⇐⇒ r =
1
4
(
1 ±√
9)
= 1 , −1
2.
Por tanto r1 = 1, r2 = −1/2 y r1 − r2 = 3/2 /∈ N, y el teorema de Frobenius implica que la solucion generalde la ecuacion es de la forma
u(x) = c1 x v1(x) + c2 |x|−1/2v2(x) , ci ∈ R ,
con vi(x) analıtica en el origen y vi(0) = 1 (i = 1, 2). Ademas, al ser p y q polinomios, el radio de convergenciade la serie de MacLaurin de v1 y v2 es infinito.
Claramente, las soluciones con c1 = 0 y c2 6= 0 no estan acotadas cuando x → 0, ya que se comportan como
c2 |x|−1/2 en las proximidades del origen. Por tanto, no todas las soluciones de la ecuacion estan acotadas enun entorno del origen.
Por otra parte, las soluciones no nulas analıticas en 0 son aquellas con c1 6= 0 y c2 = 0, todas ellas propor-cionales a la solucion x v1(x). Ya que v1(x) es analıtica en 0 (con radio de convergencia infinito, por lo dichoanteriormente) podemos escribir
v1(x) =
∞∑
i=0
ai xi , ∀x ∈ R ,
con a0 = v1(0) = 1. Sustituyendo la solucion u(x) = x v1(x) en la ecuacion obtenemos
2
∞∑
i=0
i(i + 1) ai xi+1 +
∞∑
i=0
(i + 1) ai xi+1 +
∞∑
i=0
(i + 1) ai xi+2 −∞∑
i=0
ai xi+1 − 2
∞∑
i=0
ai xi+2
=∞∑
i=1
i(2i + 3) ai xi+1 +∞∑
i=0
(i − 1) ai xi+2 =∞∑
i=1
[
i(2i + 3) ai + (i − 2)ai−1
]
xi+1 = 0 .
Igualando a cero los coeficientes de las potencias de x en esta identidad obtenemos la relacion de recurrencia
ai =2 − i
i(2i + 3)ai−1 , i = 1, 2, . . . .
La relacion anterior se resuelve facilmente:
a1 =1
5a0 =
1
5; a2 = 0 =⇒ ai = 0 ∀i = 2, 3, . . . .
Por tanto, las unicas soluciones no nulas analıticas en el origen son las de la forma
u(x) = c1 x(
1 +x
5
)
, c1 6= 0 .

4. Dado el sistema dinamico x = y, y = x(1 − x − y), se pide:
i) Clasificar sus puntos crıticos.
ii) Dibujar aproximadamente su mapa de fases. [Ayuda: una de las orbitas del sistema es una recta]
iii) Si(
x0(t), y0(t))
es la solucion del sistema con las condiciones iniciales x0(0) = 0, y0(0) = 2, hallar limt→+∞
(
x0(t), y0(t))
.
i) El sistema dinamico dado puede escribirse en la forma (x, y) =(
f(x, y), g(x, y))
, con f(x, y) = y y g(x, y) =x(1 − x − y). Sus puntos crıticos son las soluciones del sistema f(x, y) = g(x, y) = 0, es decir
{
y = 0
x(1 − x − y) = 0⇐⇒ (x, y) = (0, 0) , (1, 0) .
Para clasificar los dos puntos crıticos obtenidos, calculamos
D(f, g)(x, y) =
(
0 11 − 2x − y −x
)
=⇒ δ(x, y) = det[
D(f, g)(x, y)]
= 2x + y − 1 , τ(x, y) = tr[
D(f, g)(x, y)]
= −x .
En el origenδ(0, 0) = −1 < 0 ,
y por tanto (0, 0) es un punto de silla. Las rectas tangentes en el origen a las separatrices que pasan por dichopunto son las determinadas por los dos autovectores linealmente independientes de la matriz D(f, g)(0, 0) =(
0 11 0
)
, es decir (1,±1). Mas concretamente, al ser (1, 1) autovector correspondiente al autovalor 1 > 0 la
separatriz que “sale” del origen es tangente a la recta y = x en dicho punto. Del mismo modo, al ser (1,−1)el autovector correspondiente al autovalor negativo −1, la separatriz que “entra” en el origen es tangente endicho punto a la recta y = −x. De hecho, esta separatriz coincide con la recta y = −x, ya que esta recta esuna orbita del sistema (sustituyendo y = −x en el sistema obtenemos una ecuacion en x solamente: x = −x).
En el otro punto crıtico (1, 0) tenemos
δ(1, 0) = 1 , τ(1, 0) = −1 .
Al ser τ2 − 4δ = −3 < 0 y τ < 0, el punto (1, 0) es un foco estable.
ii) Para dibujar aproximadamente el mapa de fases del sistema, basta practicamente tener en cuenta la clasifi-cacion de los puntos crıticos efectuada en el apartado anterior junto con el signo de x e y. En particular, noteseque las orbitas tienen tangente vertical en el punto de corte con el eje x, y tangente horizontal los puntos decorte con el eje y y con la recta x + y = 1. De esto se deduce que la separatriz que sale del origen tiene unarama que va a parar en el foco (1, 0) cuando t → +∞, lo cual facilita el dibujo del mapa de fases (ver figura)
-2 -1.5 -1 -0.5 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0.5
1
1.5
2
iii) Un vistazo al mapa de fases esbozado en el apartado anterior permite afirmar que cualquier orbita quecorte el semieje y positivo tiende al foco (1, 0) cuando t → +∞. En particular, el lımite pedido es el punto(1, 0).

ECUACIONES DIFERENCIALES I Grupo D 2 de septiembre de 2002
Apellidos: D.N.I.:
Nombre: Firma:
1. Dada la ecuacion y′ = |x| − y se pide:
i) Indicar cuantas soluciones satisfacen y(0) = 0
ii) Escribir la solucion que verifica y(0) = 1, precisando su dominio
iii) Dibujar aproximadamente sus soluciones [2.5 puntos]
i) La ecuacion dada es lineal con coeficientes continuos en todo R (notese que f(x) = |x| es continua en x = 0,aun no siendo derivable en dicho punto). Por el teorema de existencia y unicidad para ecuaciones lineales,existe solucion unica de la ecuacion con cualquier dato inicial y(x0) = y0, y su dominio es toda la recta real.
ii) La solucion general de la ecuacion homogenea es y = c e−x, con c constante arbitraria. La solucion generalde la ecuacion completa se puede hallar (por ejemplo) aplicando el metodo de variacion de constantes, es decir:
y = c(x) e−x =⇒ c′(x) = |x| ex ≡ sig(x)x ex =⇒ c(x) = c1 +
∫ x
0
sig(t) t et dt = c1 + sig(x)(x ex − ex + 1)
=⇒ y = c1 e−x + sig(x)(x − 1 + e−x) ,
donde sig(x) es el signo de x. La solucion que verifica y(0) = 1 satisface
1 = c1 + sig(0)(0 − 1 + 1) = c1 =⇒ y = e−x + sig(x)(x − 1 + e−x) =
{
x − 1 + 2e−x , x > 01 − x x ≤ 0
Esta solucion (como cualquier otra solucion de la ecuacion) tiene por dominio toda la recta real.
iii) La ecuacion de las isoclinas es y = |x| − m, siendo m la pendiente. En particular, las soluciones de laecuacion dada tienen un punto crıtico cuando cortan la “cuna” y = |x|. Dado que y′ > 0 en la region y < |x| ey′ < 0 si y > |x|, es facil ver que las soluciones tienen un maximo cuando cortan la semirrecta y = −x < 0, yun mınimo en su interseccion con la semirrecta y = x > 0. Teniendo en cuenta que las semirrectas y = x − 1(si x > 0) e y = 1 − x (si x < 0) son soluciones (indicadas en rojo en la figura), y que las soluciones de laecuacion se comportan como (c1 − 1)e−x para x → −∞ y x − 1 para x → ∞, se obtiene facilmente la figura.
-4 -2 2 4
-4
-3
-2
-1
1
2
3
4

2. Considerese la ecuacion u′′′(x) + 2 u′′(x) + (1 + a)u′(x) + 4 a2 u(x) = e−x.
i) Hallar una solucion particular de la ecuacion para todos los valores de a ∈ R
ii) Determinar para que valores de a la ecuacion es asintoticamente estable [2.5 puntos]
i) La forma mas sencilla de hallar una solucion particular de la ecuacion es mediante el metodo de loscoeficientes indeterminados. Dicho metodo asegura en este caso que la ecuacion dada tiene una solucionde la forma u(x) = c xre−x, donde r es la multiplicidad de −1 como raız del polinomio caracterısticop(λ) = λ3 + 2λ2 + (1 + a)λ + 4a2 de la ecuacion homogenea. Como p(−1) = −a + 4a2, de esto se sigueque si a 6= 0, 1
4 hay una solucion particular de la forma u(x) = c e−x, donde la constante c se calcula facilmentesustituyendo en la ecuacion:
p(D)(c e−x) = c(4a2 − a)e−x = e−x ⇐⇒ c =1
a(4a − 1)
(
D =d
dx
)
.
Luego u(x) = e−x
a(4a − 1)es una solucion particular de la ecuacion para a 6= 0, 1
4 . Si a = 0 o a = 14 entonces
−1 es raız de p, y por tanto r ≥ 1 en ambos casos. Al ser p′(λ) = 3λ2 + 4λ + 1 + a =⇒ p′(−1) = a yp′′(λ) = 6λ + 4 =⇒ p′′(−1) = −2, si a = 0 entonces −1 es una raız doble de p y r = 2, mientras que si a = 1entonces −1 es raız simple de p y debemos tomar r = 1. Por tanto, si a = 0 la ecuacion tiene una solucionparticular de la forma u(x) = c x2e−x. Recordando que (D + λ)k(f(x) e−λx) = f (k)(x) e−λx y desarrollandop(λ) en potencias de λ + 1 se obtiene:
p(λ) = λ3 + 2λ2 + λ = λ(λ + 1)2 = (λ + 1)3 − (λ + 1)2
=⇒ p(D)(c x2 e−x) = c e−x(D3 − D2)(x2) = −2 c e−x = e−x ⇐⇒ c = −1
2.
Por tanto, si a = 0 una solucion particular es u(x) = − 12 x2 e−x. Finalmente, si a = 1
4 hay una solucionparticular de la forma u(x) = c x e−x, donde la constante c satisface P (D)(c x e−x) = e−x, es decir:
p(λ) = λ3 + 2λ2 +5
4λ +
1
4= (λ + 1)3 − (λ + 1)2 +
1
4(λ + 1)
=⇒ p(D)(c x2 e−x) = c e−x
(
D3 − D2 +1
4D
)
(x) = − c
4e−x = e−x ⇐⇒ c = 4 .
ii) La matriz de Routh–Hurwitz asociada al polinomio caracterıstico de la ecuacion es
2 1 04a2 a + 1 20 0 4a2
.
Segun el criterio de Routh–Hurwitz, la ecuacion dada sera asintoticamente estable si solo si todos los menoresprincipales de esta matriz son estrictamente positivos, es decir si y solo si se cumplen las desigualdades
2 > 0, 2(a + 1) − 4a2 > 0, 4a2(2a + 2 − 4a2) > 0 ,
que obviamente son equivalentes a las condiciones a 6= 0, 2a2−a−1 < 0. Como 2a2−a−1 = 2(a−1)(
a + 12
)
, la
ecuacion dada es asintoticamente estable si y solo si − 12 < a < 1 y a 6= 0, es decir si y solo si a ∈
(
− 12 , 0
)
∪(
0, 1)
.

3. Sea la ecuacion 2x2(1 + x2)u′′(x) − x(3 + 7 x2)u′(x) + 2(1 + 2 x2)u(x) = 0.
i) Hallar una solucion que no sea analıtica en x = 0
ii) Calcular la solucion general de la ecuacion [2.5 puntos]
La ecuacion dada tiene claramente un punto singular en x = 0. Dicho punto singular es regular, ya que laecuacion es de la forma x2 u′′(x) + x p(x)u′(x) + q(x)u(x) = 0 con
p(x) = − 3 + 7x2
2(1 + x2), q(x) =
1 + 2x2
1 + x2
analıticas en x = 0 (son funciones racionales cuyo denominador no se anula en 0). La ecuacion indicial para elpunto singular regular x = 0 es
r(r − 1) + p(0)r + q(0) ≡ r(r − 1) − 3
2r + 1 = r2 − 5
2r + 1 = 0 ,
cuyas soluciones son r1 = 2, r2 = 12 . Como r1 − r2 = 3
2 no es entero, el teorema de Frobenius asegura que lasolucion general de la ecuacion en las proximidades de x = 0 es de la forma
u(x) = c1
√
|x| u1(x) + c2 x2 u2(x),
con c1 y c2 constantes reales, u1 y u2 analıticas en x = 0 y u1(0) = u2(0) = 1. Por tanto las unicas solucionesde la ecuacion no analıticas en x = 0 son las proporcionales a
√
|x|u1(x). La funcion u1(x) ≡ ∑
∞
k=0 ak xk
(a0 = 1) se calcula sustituyendo√
|x|u1(x) =∑
∞
k=0 ak xk+ 1
2 en la ecuacion diferencial:
∞∑
k=0
[
2
(
k +1
2
) (
k − 1
2
)
− 3
(
k +1
2
)
+ 2
]
ak xk+ 1
2 +
∞∑
k=0
[
2
(
k +1
2
) (
k − 1
2
)
− 7
(
k +1
2
)
+ 4
]
ak xk+ 5
2
=
∞∑
k=1
k(2k − 3)ak xk+ 1
2 +
∞∑
k=0
k(2k − 7)ak xk+ 5
2 = −a1 x3
2 +
∞∑
k=2
[k(2k − 3) ak + (k − 2)(2k − 11) ak−2] xk+ 1
2
= 0 ⇐⇒ a1 = 0 ; k(2k − 3)ak = (2 − k)(2k − 11) ak−2 , k = 2, 3, . . . .
De la relacion de recurrencia se sigue que a2 = 0, y por tanto ak = 0 para todo k ≥ 3. Luego las soluciones dela ecuacion no analıticas en x = 0 son las de la forma u(x) = c1
√
|x|, con c1 6= 0.
ii) La solucion general de la ecuacion se puede hallar (al menos) de dos formas distintas: a) por el metodo delwronskiano (o de reduccion del orden), a partir de la solucion u(x) =
√
|x| obtenida en el apartado anterior,y b) sustituyendo u(x) = x2 u2(x) ≡
∑
∞
k=0 bk xk+2 (b0 = 1) en la ecuacion diferencial.
a) Una solucion linealmente independiente de la hallada en el apartado anterior es u(x) =√
|x|∫ x 1
|t|e−
∫
t
a1(s) dsdt,
donde
a1(x) = − 3 + 7x2
2x(1 + x2)= − 3
2x− 2x
1 + x2=⇒ −
∫ t
a1(s) ds =3
2log |t| + log(1 + t2) .
Por tanto (tomando x > 0, por sencillez)
u(x) =√
x
∫ x √t (1 + t2) dt = 2
√x
∫
√
x
s2(1 + s4) ds = 2√
x
(
1
3x
3
2 +1
7x
7
2
)
=2
3x2
(
1 +3
7x2
)
.
b) Sustituyendo u(x) =∑
∞
k=0 bk xk+2 en la ecuacion diferencial se obtiene
∞∑
k=0
[2(k + 1)(k + 2) − 3(k + 2) + 2]bk xk+2 +
∞∑
k=0
[2(k + 1)(k + 2) − 7(k + 2) + 4]bk xk+4
=
∞∑
k=1
k(2k + 3)bk xk+2 +
∞∑
k=0
(k − 2)(2k + 3)bk xk+4 = 5b1x3 +
∞∑
k=2
[k(2k + 3)bk + (k − 4)(2k − 1)bk−2]xk+2
= 0 ⇐⇒ b1 = 0 ; k(2k + 3)bk = (4 − k)(2k − 1) bk−2 , k = 2, 3, . . . .

De b1 = 0 y la relacion de recurrencia se sigue que b2n+1 = 0 para todo n = 0, 1, 2, . . . .. Por otra parte
14 b2 = 6 =⇒ b2 =3
7; 4 · 11 b4 = 0 · b2 =⇒ b4 = 0 =⇒ b2n = 0 , n = 2, 3, . . . .
Por tanto u(x) = x2 + b2 x4 = x2(
1 + 37 x2
)
.
En definitiva, la solucion general de la ecuacion propuesta es
u = c1
√
|x| + c2 x2
(
1 +3
7x2
)
.
4. Dado el sistema dinamico x = x, y = 2y − y2 + x4 se pide:
i) Clasificar sus puntos crıticos
ii) Hallar la expresion de sus orbitas [Ayuda: las parabolas y = ±x2 son orbitas del sistema]
iii) Dibujar aproximadamente su mapa de fases [2.5 puntos]
i) Los puntos crıticos son las soluciones del sistema f(x, y) ≡ x = 0, g(x, y) ≡ 2y − y2 + x4 = 0, es decirP0 = (0, 0) y P1 = (0, 2). La matriz jacobiana de la aplicacion (f, g) es
D(f, g)(x, y) =
(
1 04x3 2 − 2y
)
=⇒ D(f, g)(0, 0) =
(
1 00 2
)
, D(f, g)(0, 2) =
(
1 00 −2
)
.
En el origen D(f, g) tiene dos autovalores positivos, y por tanto dicho punto es un nodo inestable. El punto(0, 2) es un punto de silla, dado que detD(f, g)(0, 2) = −2 < 0.
ii) La ecuacion de las orbitasdy
dx= x3 +
2
xy − 1
xy2
es una ecuacion de Riccati, con soluciones particulares y = ±x2 (vease la ayuda). La teorıa de dicha ecuaciongarantiza que el cambio u = (y ± x2)−1 la transforma en una ecuacion lineal en u. En efecto (tomando, porejemplo, el signo menos) efectuando dicho cambio se obtiene la ecuacion
du
dx+ 2
(
1
x− x
)
=1
x.
La ecuacion homogenea se resuelve facilmente:
1
u
du
dx= 2
(
x − 1
x
)
=⇒ log |u| = x2 − 2 logx + c0 =⇒ u = cex2
x2,
con c0 y c = ±ec0 contantes arbitrarias. Sustituyendo u = c(x) ex2
x2 en la ecuacion completa se obtiene
c′(x) = x e−x2
=⇒ c(x) = −1
2e−x2
+k
2=⇒ u =
1
2x2 (k ex2 − 1), k ∈ R .
La ecuacion cartesiana de las orbitas se obtiene teniendo en cuenta que y = x2 + 1u , es decir
y = x2 +2x2
k ex2 − 1= x2 k ex2
+ 1
k ex2 − 1
(notese que la solucion particular y = x2 corresponde a tomar k → ±∞).

iii) Para dibujar el mapa de fases hay que tener en cuenta los datos de los apartados anteriores; en particular,es muy util utilizar que las parabolas y = ±x2 (en rojo en la figura) son orbitas, y por tanto las demas orbitasno pueden cortar a dichas parabolas. otro dato adicional de interes es calculo de las separatrices que pasanpor el punto de silla (0, 2) (representadas en verde en la figura). Para ello, notese que dichas separatrices hande ser tangentes a los ejes coordenados en el punto (0, 2), ya que D(f, g)(0, 2) es diagonal, y por tanto losautovectores son proporcionales a los vectores (1, 0) (separatriz “saliente”, correspondiente al autovalor 1 > 0)y (0, 1) (separatriz “entrante”, correspondiente al autovalor −2 > 0). La separatriz vertical es de hecho larecta x = 0, ya que dicha recta es una orbita (en efecto, sustituyendo x = 0 en el sistema se obtiene unaecuacion diferencial en y(t)). Notese, sin embargo, que la separatriz horizontal no es la recta y = 2, ya quedicha recta no es una orbita. (La ecuacion de la separatriz horizontal se obtiene de la ecuacion cartesiana delas orbitas imponiendo que y = 2 para x = 0, lo cual conduce al valor k = 1.) Analogamente, las dos rectasde autovectores de D(f, g)(0, 0) son de nuevo los ejes coordenados. En particular, la recta de autovectorescorrespondientes al menor autovalor en valor absoluto (−1) es el eje x, por lo que todas las orbitas del sistemaque “salen” del origen han de ser tangentes al eje x en dicho punto, con la unica excepcion de la recta x = 0.(Notese, sin embargo, que y = 0 no es una orbita; de hecho, como puede verse en la figura, hay orbitas delsistema que cortan la recta y = 0.) Por ultimo, es util notar que de la ecuacion de las orbitas se sigue que todaslas orbitas tienden a la parabola y = x2 cuando x → ±∞. Teniendo en cuenta todo lo anterior, se obtieneinmediatamente el mapa de fases de la figura.
-4 -2 2 4
-10
-7.5
-5
-2.5
2.5
5
7.5
10

ECUACIONES DIFERENCIALES I Grupo D 11 de febrero de 2003
Apellidos: D.N.I.:
Nombre: Firma:
1. Considerese la ecuacion y′ = (y − x + 1)2.
i) Hallar su solucion general.
ii) Dibujar aproximadamente la grafica de sus soluciones.
iii) Precisar cuantas soluciones verifican: a) y(0) = 0; b) y(0) = −2. [2.5 puntos]
Efectuando el cambio de variable z = y − x + 1 se obtiene:
z′ = y′ − 1 = z2 − 1 =⇒ x + c1 =
∫
dz
z2 − 1=
1
2
∫ (
1
z − 1− 1
z + 1
)
dz
=⇒ log
∣
∣
∣
∣
z − 1
z + 1
∣
∣
∣
∣
= 2(x + c1) =⇒ z − 1
z + 1= c e2x =⇒ z =
1 + c e2x
1 − c e2x
=⇒ y = x − 1 +1 + c e2x
1 − c e2x= x +
2c e2x
1 − c e2x,
con c1 y c constantes reales. Notese que al dividir por z2 − 1 para integrar la ecuacion diferencial en z se hanperdido las dos soluciones constantes z = ±1, es decir las soluciones y = x e y = x − 2. La primera de estassoluciones de hecho esta incluıda en la expresion de la solucion general que acabamos de obtener para c = 0,pero la segunda solo se puede obtener de dicha expresion en el lımite c → ±∞.
Al ser la funcion f(x, y) = (y − x + 1)2 de clase C∞ en todo R2, el problema de valor inicial para la ecuaciondiferencial dada ha de tener solucion unica local para cualquier dato inicial y(x0) = y0. En particular, solouna solucion de la ecuacion verifica los datos iniciales a) o b) del apartado iii). De hecho (por unicidad), lasolucion que verifica y(0) = 0 es y = x, y la que verifica y(0) = −2 es y = x − 2.
Para dibujar las graficas de las soluciones de la ecuacion, notese en primer lugar que y′ ≥ 0 para cualquiersolucion, por lo que todas las soluciones son funciones monotonas no decrecientes. En segundo lugar, lasisoclinas son las rectas (de pendiente 1) y = x − 1 ±√
m (m ≥ 0); en particular, las graficas de las solucionestienen un punto de inflexion en la recta y = x − 1. Por ultimo (teorema de unicidad) las graficas de lassoluciones no pueden cortar las rectas y = x e y = x − 2. Teniendo en cuenta todo esto (y el hecho de que,en vista de la expresion general de la solucion, las graficas de las soluciones con c > 0 tienen claramente unaasıntota vertical) se obtiene facilmente la figura siguiente.
-4 -2 2 4
-4
-2
2
4

2. Sea el sistema
x′ = −a x + y + z
y′ = x − 2 y − z
z′ = −x + (a − 1)y + 2 .
i) Para a = 2, hallar su solucion general. [Ayuda: el sistema posee una solucion constante.]
ii) Determinar los valores del parametro real a para los cuales el sistema es asintoticamente estable. [3 puntos]
i) El sistema propuesto es un sistema lineal inhomogeneo X ′ = AX + b, con X = (x, y, z) ∈ R3, b = (0, 0, 2) y
A =
−a 1 11 −2 −1
−1 a − 1 0
. La solucion general del sistema sera por tanto X(t) = etAc+Xp(t), siendo c ∈ R3 y
Xp(t) una solucion particular del sistema inhomogeneo. Como el termino inhomogeneo del sistema es constante(y detA 6= 0 para a = 2), para a = 2 hay una solucion particular constante Xp(t) = v que se puede hallarfacilmente sustituyendo en el sistema (con a = 2):
0 = Av + b ⇐⇒ v = −A−1b = (1,−1, 3) .
La exponencial de la matriz tA se halla facilmente, por ejemplo, mediante el metodo del polinomio interpoladorde Lagrange. En efecto, si a = 2 el polinomio caracterıstico de A es pA(λ) ≡ det(A−λ1) = −(λ+1)2(λ+2), ylos autovalores de A son por tanto λ = −1 (de multiplicidad algebraica 2) y λ = −2. Como el rango de A + 1
es 1, la dimension del nucleo de A+ 1 es 2. Por tanto la matriz A es diagonalizable, y su polinomio mınimo esφA(λ) = (λ+1)(λ+2), de grado 2. De esto se deduce que etA = α1+βA, donde α y β se calculan resolviendoel sistema
e−t = α − β , e−2t = α − 2β ,
cuya solucion es α = 2e−t − e−2t, β = e−t − e−2t. En definitiva, para a = 2 la solucion general del sistema es
X =[
(2e−t − e−2t)1 + (e−t − e−2t)A]
· c + (1,−1, 3) ⇐⇒
x = c1 e−2t + (c2 + c3)(e−t − e−2t) + 1
y = c2 e−2t + (c1 − c3)(e−t − e−2t) − 1
z = (c2 − c1)(e−t − e−2t) + c3(2e−t − e−2t) + 3 .
ii) El polinomio caracterıstico de la matriz A es igual a
pA(λ) = det(A − λ1) = −[
λ3 + (a + 2)λ2 + (3a − 1)λ + a2 − 2a + 2]
≡ −P (λ).
El sistema es asintoticamente estable si y solo si el polinomio P es estable (todos sus autovalores tienen partereal negativa). Por el criterio de Routh–Hurwitz, esto ocurrira si y solo si los menores principales de la matriz
a + 2 1 0a2 − 2a + 2 3a− 1 a + 2
0 0 a2 − 2a + 2
son positivos. Calculando dichos menores se obtienen las condiciones
a+2 > 0 ; (a+2)(3a−1)− (a2−2a+2) = 2a2 +7a−4 = (a+4)(2a−1) ≡ ∆ > 0 ; ∆(a2−2a+2) > 0 .
Notese que a2 − 2a + 2 = (a− 1)2 + 1 > 0 para todo a, mientras que la condicion ∆ > 0 se cumple si y solo sia < −4 o a > 1/2. Por tanto, el sistema sera asintoticamente estable si y solo si a > 1/2.

3. Dada la ecuacion x2 u′′ + xu′ +(
x − 1
4
)
u = 0 (con x > 0), se pide:
i) Hallar una solucion no trivial de la forma xrv(x), con v analıtica y no nula en x = 0.
ii) Determinar si todas las soluciones de la ecuacion son de la forma anterior. [2.5 puntos]
i) La ecuacion dada es de la forma x2 u′′ + x p(x)u′ + q(x)u = 0, con p(x) = 1 y q(x) = x − 1
4funciones
analıticas (polinomios) en x = 0. Por tanto x = 0 es un punto singular regular de la ecuacion, con polinomioindicial
F (r) = r(r − 1) + p(0)r + q(0) = r(r − 1) + r − 1
4= r2 − 1
4.
Las raıces del polinomio indicial son por tanto r1 = 1
2y r2 = − 1
2. El teorema de Frobenius asegura la existencia
de una solucion de la ecuacion de la forma u1(x) = x1/2v(x), con v(x) =∑
∞
n=0cnxn analıtica en 0 y (por
ejemplo) c0 = 1. (Ademas, como las series de MacLaurin de p y q tienen radio de convergencia infinito, lomismo ocurre con la serie de Taylor de v.) Sustituyendo el desarrollo que define a u1 en la ecuacion diferencialse obtiene:
0 =∞∑
n=0
[(
n + 1
2
) (
n − 1
2
)
+(
n + 1
2
)
− 1
4
]
cn xn+ 1
2 +∞∑
n=0
cn xn+ 3
2 =∞∑
n=1
[n(n + 1)cn + cn−1] xn+ 1
2
lo que conduce a la relacion de recurrencia
cn = − cn−1
n(n + 1), n = 1, 2, . . .
cuya solucion (teniendo en cuenta que hemos tomado c0 = 1) es
cn =(−1)n
n! (n + 1)!, n = 0, 1, . . . .
Por tanto una solucion del tipo indicado en el apartado i) es
u1(x) =
∞∑
n=0
(−1)n
n! (n + 1)!xn+ 1
2 (x > 0) .
ii) Al ser r1 − r2 = 1 ∈ N, el teorema de Frobenius afirma que la ecuacion posee una solucion linealmenteindependiente de la anterior de la forma
u2(x) = c log xu1(x) + x−1
2 w(x) (x > 0) ,
con w(x) =∑
∞
n=0bnxn analıtica en x = 0 y (por ejemplo) b0 = 1. Todas las soluciones seran por tanto del
tipo indicado en el apartado i) si y solo si c = 0. Si c = 0, sustituyendo la expresion de u2 en la ecuaciondiferencial se obtiene
0 =
∞∑
n=0
[(
n − 1
2
) (
n − 3
2
)
+(
n − 1
2
)
− 1
4
]
bn xn− 1
2 +
∞∑
n=0
bn xn+ 1
2 =
∞∑
n=0
n(n − 1)bn xn− 1
2 +
∞∑
n=0
bn xn+ 1
2 .
El coeficiente de x1/2 es b0 = 1 6= 0, por lo que la igualdad anterior no se puede satisfacer. Por tanto c 6= 0, yno toda solucion de la ecuacion es del tipo especificado en el apartado i).

4. Considerese el sistema dinamico x = 4 x − 2 y, y = 2 x − x y.
i) Calcular y clasificar sus puntos crıticos.
ii) Dibujar esquematicamente el mapa de fases del sistema en un entorno de cada punto crıtico. [2 puntos]
i) Los puntos crıticos son las soluciones del sistema de ecuaciones f(x, y) ≡ 4x−2y = 0, g(x, y) ≡ x(2−y) = 0,es decir (0, 0) y (1, 2). La matriz jacobiana de la aplicacion (f, g) es
D(f, g)(x, y) =
(
4 −22 − y −x
)
=⇒ D(f, g)(0, 0) =
(
4 −22 0
)
, D(f, g)(1, 2) =
(
4 −20 −1
)
.
La matriz jacobiana en el origen tiene determinante δ = 4 y traza τ = 4. Al ser τ2 − 4δ = 0, τ > 0 yD(f, g)(0, 0) no proporcional a la matriz unidad, el origen es un nodo inestable de una tangente. En elpunto crıtico (1, 2) la matriz jacobiana tiene determinante negativo, por lo que (1, 2) es un punto de silla.
ii) Como hemos visto en el apartado anterior, la aproximacion lineal en el punto crıtico (0, 0) tiene un nodode una tangente. Dicha tangente es la recta de autovectores correspondientes al unico autovalor λ = τ/2 = 2de la matriz D(f, g)(0, 0), es decir
(
2 −22 −2
) (
XY
)
= 0 ⇐⇒ Y = X .
Teniendo en cuenta que en la aproximacion lineal Y = 2X , por lo que Y (t) crece en el semiplano X > 0 ydecrece en el semiplano X < 0, el mapa de fases de la aproximacion lineal en el origen tiene el aspecto de lafigura 1. El mapa de fases del sistema dado en las proximidades del origen es cualitativamente semejante al desu aproximacion lineal (vease la figura 2).
La aproximacion lineal en el punto (1, 2) tiene un punto de silla en el origen. Las orbitas que “entran” y“salen” del origen son las rectas de autovectores de la matriz jacobiana en el punto (1, 2), cuyos autovaloresson 4 y −1. Los autovectores correspondientes se calculan facilmente:
λ = 4 =⇒(
0 −20 −5
) (
XY
)
= 0 ⇐⇒ Y = 0 ; λ = −1 =⇒(
5 −20 0
) (
XY
)
= 0 ⇐⇒ Y =5
2X .
El mapa de fases del sistema en las proximidades del punto (1, 2) ha de ser cualitativamente semejante al desu aproximacion lineal. En particular, las rectas Y = 0 e Y = 5
2X se transforman en dos orbitas (separatrices)
que pasan por el punto crıtico (1, 2) con pendiente 0 y 5
2, respectivamente (figura 3). (Nota: de hecho, puede
probarse que en este caso la orbita que “sale” del punto crıtico (1, 2) con pendiente 0 es de hecho la rectay = 2.)
-2 -1 1 2
-2
-1.5
-1
-0.5
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0.5
1
1.5
2
-2 -1 1 2 3 4
1
2
3
4
5
Figura 1 Figura 2 Figura 3
Nota: estas soluciones se pueden encontrar en el servicio de fotocopias y en la pagina web del Departamentode Fısica Teorica II (http://www.ucm.es/info/metodos/docencia.htm).
ECUACIONES DIFERENCIALES I Grupo D 1 de septiembre de 2003
Apellidos: D.N.I.:
Nombre: Firma:
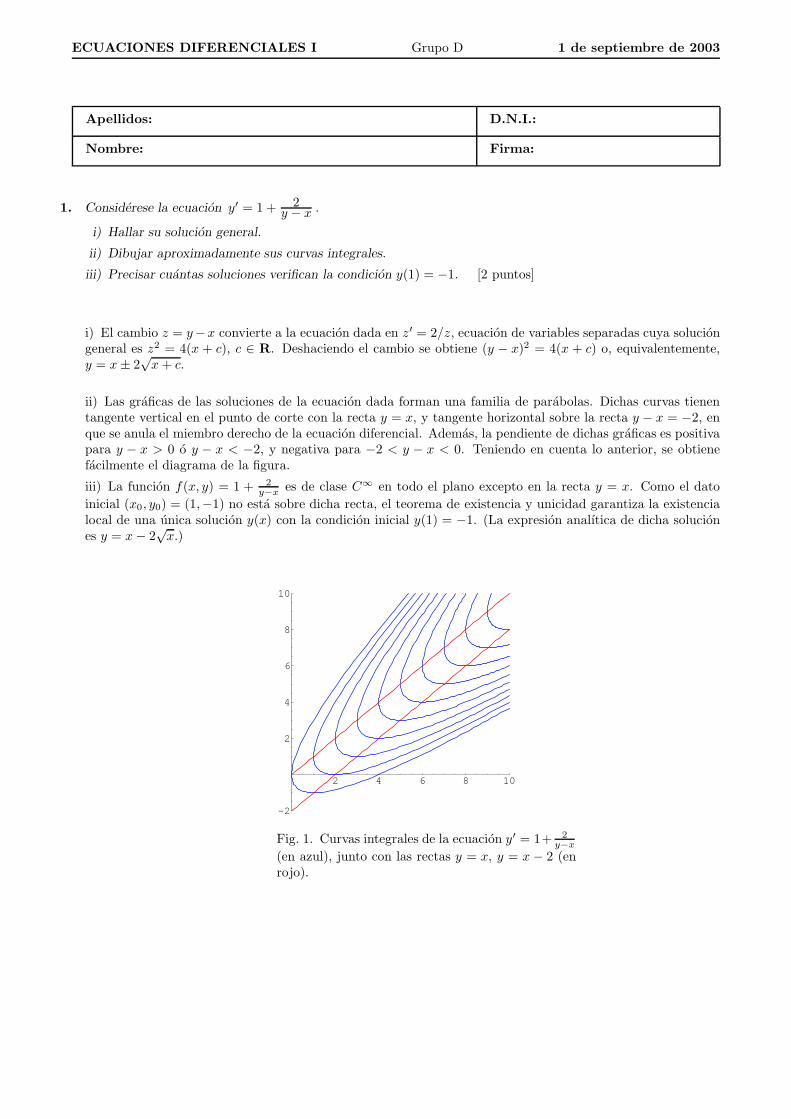
1. Considerese la ecuacion y′ = 1 + 2y − x .
i) Hallar su solucion general.
ii) Dibujar aproximadamente sus curvas integrales.
iii) Precisar cuantas soluciones verifican la condicion y(1) = −1. [2 puntos]
i) El cambio z = y−x convierte a la ecuacion dada en z′ = 2/z, ecuacion de variables separadas cuya soluciongeneral es z2 = 4(x + c), c ∈ R. Deshaciendo el cambio se obtiene (y − x)2 = 4(x + c) o, equivalentemente,y = x ± 2
√x + c.
ii) Las graficas de las soluciones de la ecuacion dada forman una familia de parabolas. Dichas curvas tienentangente vertical en el punto de corte con la recta y = x, y tangente horizontal sobre la recta y − x = −2, enque se anula el miembro derecho de la ecuacion diferencial. Ademas, la pendiente de dichas graficas es positivapara y − x > 0 o y − x < −2, y negativa para −2 < y − x < 0. Teniendo en cuenta lo anterior, se obtienefacilmente el diagrama de la figura.
iii) La funcion f(x, y) = 1 + 2y−x
es de clase C∞ en todo el plano excepto en la recta y = x. Como el dato
inicial (x0, y0) = (1,−1) no esta sobre dicha recta, el teorema de existencia y unicidad garantiza la existencialocal de una unica solucion y(x) con la condicion inicial y(1) = −1. (La expresion analıtica de dicha soluciones y = x − 2
√x.)
2 4 6 8 10
-2
2
4
6
8
10
Fig. 1. Curvas integrales de la ecuacion y′ = 1+ 2y−x
(en azul), junto con las rectas y = x, y = x − 2 (enrojo).

2. Sea la ecuacion u′′′ + 5 u′′ + 4 u′ + a u = x (con a ∈ R).
i) Hallar una solucion particular para todo valor de a.
ii) Determinar la solucion general para a = −10.
iii) Estudiar la estabilidad de la ecuacion en funcion del parametro a. [2.5 puntos]
i) Se trata de una ecuacion lineal inhomogenea con coeficientes constantes, con polinomio caracterıstico p(λ) =λ3 + 5λ2 + 4λ + a. El miembro derecho de la ecuacion es de la forma q(x)eµx, con q(x) = x polinomio degrado 1 y µ = 0. Segun el metodo de los coeficientes indeterminados, si a 6= 0 entonces µ = 0 no es raız dep, y la ecuacion admite una solucion particular de la forma u(x) = c x + d. Las constantes c y d se obtienensustituyendo esta solucion en la ecuacion:
4c + a(c x + d) = x ⇐⇒ a c = 1 , a d + 4c = 0 ⇐⇒ c = 1/a , d = −4/a2 .
Por tanto para a 6= 0 una solucion particular de la ecuacion es u =x
a− 4
a2. Si a = 0, entonces µ = 0 es una
raız de p de multiplicidad 1, por lo que debemos ensayar una solucion particular de la forma u(x) = x(c x+ d).Sustituyendo de nuevo en la ecuacion se obtiene
10c + 4(2cx + d) = x ⇐⇒ 8 c = 1 , 4 d + 10c = 0 ⇐⇒ c = 1/8 , d = −5/16 .
Por tanto una solucion particular para a = 0 es u =1
16(2x2 − 5x).
ii) Basta sumar a la solucion general de la ecuacion homogenea para a = −10 la solucion particular calculadaen el apartado anterior. Para a = −10 el polinomio caracterıstico es p(λ) = λ3 +5λ2 +4λ−10, que claramenteadmite la raız λ = 1. Dividiendo p por λ − 1 se obtiene p(λ) = (λ − 1)(λ2 + 6λ + 10), siendo λ = −3 ± i lasraıces del binomio λ2 + 6λ + 10. Por tanto la solucion general de la ecuacion dada es
u = c1 ex + e−3x(c2 cosx + c3 sen x) − x
10− 1
25, ci ∈ R .
iii) Apliquemos el criterio de Routh–Hurwitz al polinomio caracterıstico p(λ) = λ3 +5λ2 +4λ+a. La ecuacionsera asintoticamente estable si y solo si todos los menores principales de la matriz
5 1 0a 4 50 0 a
,
es decir∆1 = 5 , ∆2 = 20 − a , ∆2 = a(20 − a) ,
son positivos, e inestable si alguno de ellos es negativo. Por tanto la ecuacion es asintoticamente estable para0 < a < 20, e inestable para a < 0 y a > 20. Si a = 0 entonces p(λ) = λ(λ2 + 5λ + 4) tiene una raız nulay dos raıces reales negativas λ = −4,−1, por los que la ecuacion es estable, aunque no asintoticamente. Porultimo, si a = 20 entonces p(λ) = (λ + 5)(λ2 + 4) tiene una raız negativa λ = −5 y dos raıces con parte realnula λ = ±2i, por lo que en este caso la ecuacion tambien es estable, si bien no asintoticamente.

3. Dada la ecuacion 4 x2 u′′ − 3 u = x2, se pide:
i) Calcular los terminos de orden ≤ 4 del desarrollo en serie de potencias centrado en x = 1 de la solucion dela ecuacion homogenea que verifica u(1) = 0, u′(1) = 1.
ii) Hallar la solucion general de la ecuacion inhomogenea. [Ayuda: la ecuacion homogenea es una ecuacionde Euler]. [3 puntos]
i) Dividiendo por 4x2 la ecuacion homogenea (para ponerla en forma normal) se obtiene una ecuacion linealde segundo orden con un punto regular en x = 1, ya que sus coeficientes son funciones analıticas en dichopunto. Todas las soluciones de la ecuacion son por tanto funciones analıticas de la variable x en un entorno delpunto x = 1 (el radio de dicho entorno es ≥ 1, ya que la singularidad mas proxima a x = 1 de los coeficientesde la ecuacion esta en el origen). Para desarrollar en serie la solucion pedida es conveniente efectuar el cambiox = t + 1, y desarrollar las soluciones de la ecuacion resultante
4(t + 1)2d2u
dt2− 3u = 0
alrededor del punto t = 0. Sustituyendo u(t) =∑
∞
i=0 citi en la ecuacion anterior se obtiene
0 = 4(t2 + 2t + 1)
∞∑
i=2
i(i − 1)citi−2 − 3
∞∑
i=0
citi = 4
∞∑
i=2
i(i − 1)citi−2 + 8
∞∑
i=2
i(i − 1)citi−1 +
∞∑
i=0
(2i + 1)(2i − 3)citi
=
∞∑
i=0
[
4(i + 1)(i + 2)ci+2 + 8i(i + 1)ci+1 + (2i + 1)(2i − 3)ci
]
ti .
El dato inicial propuesto u|t=0 = 0, dudt
∣
∣
t=0= 1 implica que c0 = 0, c1 = 1. Igualando a cero los coeficientes
de tk con 0 ≤ k ≤ 3 en la igualdad anterior se obtiene:
t0 : 8c2 − 3c0 = 0 =⇒ c2 = 0 ;
t1 : 24c3 + 16c2 − 3c1 = 0 =⇒ c3 =c1
8=
1
8;
t2 : 48c4 + 48c3 + 5c2 = 0 =⇒ c4 = −c3 = −1
8.
El desarrollo pedido es por tanto u(x) = x − 1 +(x − 1)3
8− (x − 1)4
8+ . . . .
ii) El que la ecuacion homogenea sea de Euler sugiere realizar el cambio de variable t = log |x|. Denotandocon una prima la derivada respecto de x y con un punto la derivada respecto de t se tiene
u′ =1
xu , u′′ =
1
x2u − 1
x2u ,
por lo que la ecuacion diferencial propuesta se convierte en
4 u − 4 u − 3 u = e2t.
Se trata de una ecuacion lineal inhomogenea con coeficientes constantes, cuyo polinomio caracterıstico p(λ) =4λ2 − 4λ − 3 tiene las raıces λ = −1/2 y λ = 3/2. La solucion general de la ecuacion homogenea es por tanto
u(t) = c1 e−t
2 + c2 e3t
2 , con ci ∈ R. Segun el metodo de los coeficientes indeterminados, al no ser 2 una raızdel polinomio caracterıstico la ecuacion inhomogenea admite una solucion particular de la forma a e2t, dondeel coeficiente a se determina sustituyendo en la ecuacion:
16a− 8a − 3a = 1 =⇒ a =1
5.
Por tanto la solucion general de la ecuacion en t es u(t) = c1 e−t
2 + c2 e3t
2 + 15 e2t. Deshaciendo el cambio se
obtiene
u(x) = c1 |x|−1/2 + c2 |x|3/2 +x2
5, ci ∈ R .
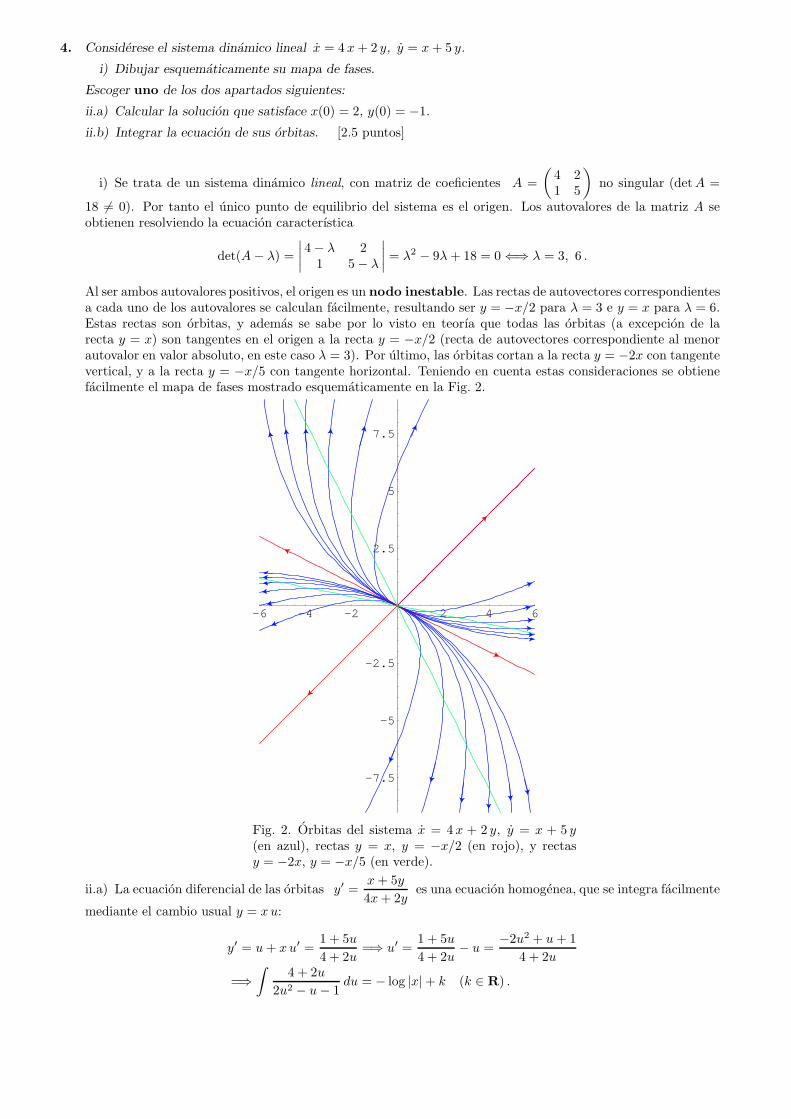
4. Considerese el sistema dinamico lineal x = 4 x + 2 y, y = x + 5 y.
i) Dibujar esquematicamente su mapa de fases.
Escoger uno de los dos apartados siguientes:
ii.a) Calcular la solucion que satisface x(0) = 2, y(0) = −1.
ii.b) Integrar la ecuacion de sus orbitas. [2.5 puntos]
i) Se trata de un sistema dinamico lineal, con matriz de coeficientes A =
(
4 21 5
)
no singular (det A =
18 6= 0). Por tanto el unico punto de equilibrio del sistema es el origen. Los autovalores de la matriz A seobtienen resolviendo la ecuacion caracterıstica
det(A − λ) =
∣
∣
∣
∣
4 − λ 21 5 − λ
∣
∣
∣
∣
= λ2 − 9λ + 18 = 0 ⇐⇒ λ = 3, 6 .
Al ser ambos autovalores positivos, el origen es un nodo inestable. Las rectas de autovectores correspondientesa cada uno de los autovalores se calculan facilmente, resultando ser y = −x/2 para λ = 3 e y = x para λ = 6.Estas rectas son orbitas, y ademas se sabe por lo visto en teorıa que todas las orbitas (a excepcion de larecta y = x) son tangentes en el origen a la recta y = −x/2 (recta de autovectores correspondiente al menorautovalor en valor absoluto, en este caso λ = 3). Por ultimo, las orbitas cortan a la recta y = −2x con tangentevertical, y a la recta y = −x/5 con tangente horizontal. Teniendo en cuenta estas consideraciones se obtienefacilmente el mapa de fases mostrado esquematicamente en la Fig. 2.
-6 -4 -2 2 4 6
-7.5
-5
-2.5
2.5
5
7.5
Fig. 2. Orbitas del sistema x = 4 x + 2 y, y = x + 5 y(en azul), rectas y = x, y = −x/2 (en rojo), y rectasy = −2x, y = −x/5 (en verde).
ii.a) La ecuacion diferencial de las orbitas y′ =x + 5y
4x + 2yes una ecuacion homogenea, que se integra facilmente
mediante el cambio usual y = xu:
y′ = u + xu′ =1 + 5u
4 + 2u=⇒ u′ =
1 + 5u
4 + 2u− u =
−2u2 + u + 1
4 + 2u
=⇒∫
4 + 2u
2u2 − u − 1du = − log |x| + k (k ∈ R) .

La integral se calcula facilmente descomponiendo el integrando, que es una funcion racional de u, en fraccionessimples:
∫
4 + 2u
2u2 − u − 1du =
∫ (
2
u − 1− 1
u + 12
)
du = log(u − 1)2∣
∣u + 12
∣
∣
=⇒ log |x| − k = log
∣
∣
∣
∣
y
x+
1
2
∣
∣
∣
∣
( y
x− 1
)2
=⇒ (y − x)2 = c (2y + x) , c = ±ek
2∈ R − {0} .
La solucion general de la ecuacion de las orbitas es por tanto la familia de parabolas (y − x)2 = c(2y + x),c ∈ R − {0}. Notese que las dos orbitas rectas (y = x e y = −x/2), que son las dos soluciones de tipo rectade la ecuacion de las orbitas, se obtienen formalmente de la solucion general en los lımites c → 0 y c → ±∞,respectivamente.
ii.b) El dato inicial(
x(0), y(0))
= (2,−1) esta sobre la orbita recta y = −x/2, por lo que y(t) = −x(t)/2 paratodo t. Sustituyendo esta relacion entre x e y en la ecuacion para x se obtiene
x = 4x + 2(−x/2) = 3x =⇒ x(t) = x(0) e3t = 2e3t =⇒ y(t) = −1
2x(t) = −e3t .
Por tanto la solucion pedida es(
x(t), y(t))
=(
2e3t,−e3t)
.
Nota: Otra forma equivalente de resolver el problema es observar que, por el primer apartado, la soluciongeneral del sistema es
(
x(t), y(t))
= c1 e3t(2,−1)+ c2 e6t(1, 1), con ci ∈ R. Utilizando el dato inicial propuesto
se obtiene la ecuacion c1(2,−1) + c2(1, 1) = (2,−1), cuya solucion es c1 = 1, c2 = 0. Por tanto(
x(t), y(t))
=e3t(2,−1), como antes.
ECUACIONES DIFERENCIALES I Grupo D 10 de febrero de 2004
Apellidos: D.N.I.:
Nombre: Firma:
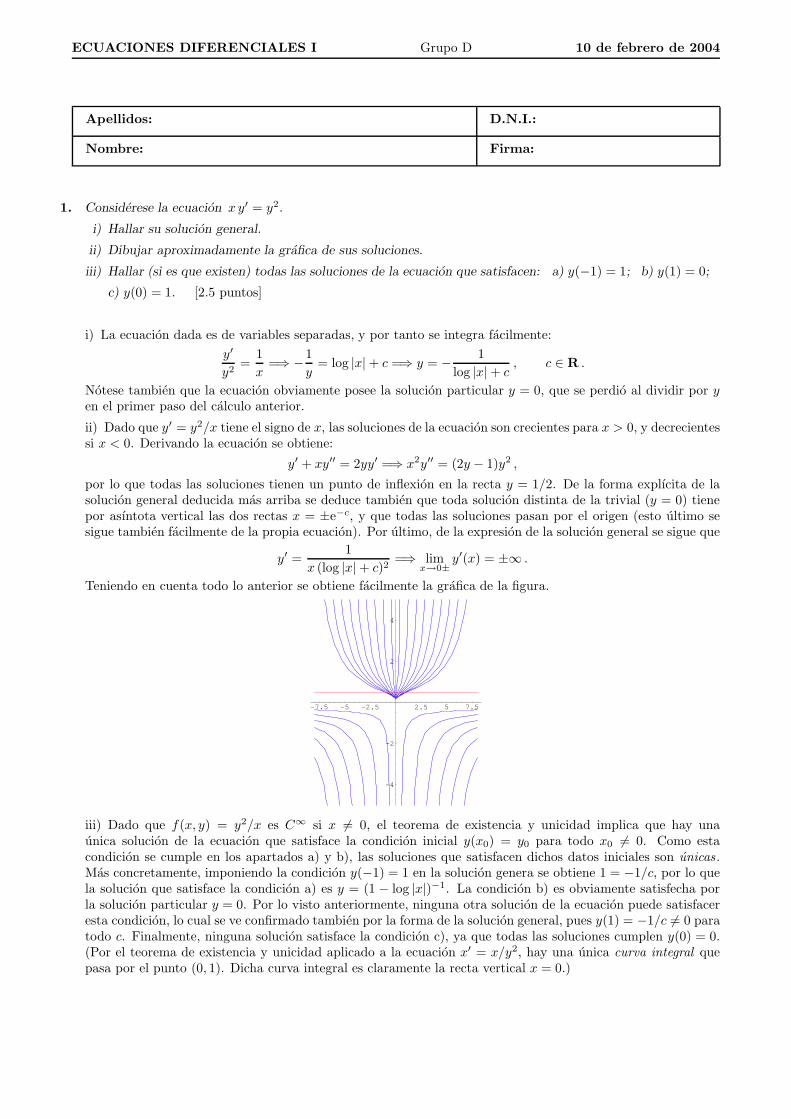
1. Considerese la ecuacion x y′ = y2.
i) Hallar su solucion general.
ii) Dibujar aproximadamente la grafica de sus soluciones.
iii) Hallar (si es que existen) todas las soluciones de la ecuacion que satisfacen: a) y(−1) = 1; b) y(1) = 0;
c) y(0) = 1. [2.5 puntos]
i) La ecuacion dada es de variables separadas, y por tanto se integra facilmente:
y′
y2=
1
x=⇒ −1
y= log |x| + c =⇒ y = − 1
log |x| + c, c ∈ R .
Notese tambien que la ecuacion obviamente posee la solucion particular y = 0, que se perdio al dividir por yen el primer paso del calculo anterior.
ii) Dado que y′ = y2/x tiene el signo de x, las soluciones de la ecuacion son crecientes para x > 0, y decrecientessi x < 0. Derivando la ecuacion se obtiene:
y′ + xy′′ = 2yy′ =⇒ x2y′′ = (2y − 1)y2 ,
por lo que todas las soluciones tienen un punto de inflexion en la recta y = 1/2. De la forma explıcita de lasolucion general deducida mas arriba se deduce tambien que toda solucion distinta de la trivial (y = 0) tienepor asıntota vertical las dos rectas x = ±e−c, y que todas las soluciones pasan por el origen (esto ultimo sesigue tambien facilmente de la propia ecuacion). Por ultimo, de la expresion de la solucion general se sigue que
y′ =1
x (log |x| + c)2=⇒ lim
x→0±y′(x) = ±∞ .
Teniendo en cuenta todo lo anterior se obtiene facilmente la grafica de la figura.
-7.5 -5 -2.5 2.5 5 7.5
-4
-2
2
4
iii) Dado que f(x, y) = y2/x es C∞ si x 6= 0, el teorema de existencia y unicidad implica que hay unaunica solucion de la ecuacion que satisface la condicion inicial y(x0) = y0 para todo x0 6= 0. Como estacondicion se cumple en los apartados a) y b), las soluciones que satisfacen dichos datos iniciales son unicas .Mas concretamente, imponiendo la condicion y(−1) = 1 en la solucion genera se obtiene 1 = −1/c, por lo quela solucion que satisface la condicion a) es y = (1 − log |x|)−1. La condicion b) es obviamente satisfecha porla solucion particular y = 0. Por lo visto anteriormente, ninguna otra solucion de la ecuacion puede satisfaceresta condicion, lo cual se ve confirmado tambien por la forma de la solucion general, pues y(1) = −1/c 6= 0 paratodo c. Finalmente, ninguna solucion satisface la condicion c), ya que todas las soluciones cumplen y(0) = 0.(Por el teorema de existencia y unicidad aplicado a la ecuacion x′ = x/y2, hay una unica curva integral quepasa por el punto (0, 1). Dicha curva integral es claramente la recta vertical x = 0.)

2. Sea el sistema y′ = Ay + f(x), con y ∈ R3, f(x) = (ex, e2x, x e−x) y A =
0 0 −21 0 01 0 −2
.
i) Hallar la solucion del sistema homogeneo que satisface y(0) = (1, 0, 1).
ii) Determinar la estabilidad del sistema completo. [2.5 puntos]
i) El polinomio caracterıstico de la matriz A es pA(λ) ≡ det(A− λ) = −λ (λ2 + 2λ + 2). Los autovalores de Ason por tanto λ1 = 0 y λ2,3 = −1± i. Al ser todos los autovalores simples, el polinomio mınimo de A coincidecon el caracterıstico, y es por tanto de grado 3. De esto se sigue que el polinomio interpolador de Lagrange deexA es de grado 2, es decir
exA = α1 + βA + γA2 .
Los coeficientes α, β, y γ se determinan resolviendo el siguiente sistema:
e0·x = α + β · 0 + γ · 0 = α
e(−1+i)x = α + β(−1 + i) + γ(−1 + i)2 = α + β(−1 + i) − 2iγ
e−(1+i)x = α − β(1 + i) + γ(1 + i)2 = α − β(1 + i) + 2iγ .
De esta forma se obtiene α = 1, β = 1 − e−x cosx y γ = 12
[
1 − e−x(sen x + cosx)]
. Si v = (1, 0, 1), la solucion
pedida es y(x) = exAv = v +(
1 − e−x cosx)
Av + 12
[
1 − e−x(sen x + cosx)]
A2v. Teniendo en cuenta queAv = (−2, 1,−1) y A2v = A(Av) = (2,−2, 0) se obtiene
y(x) = (1, 0, 1) +(
1 − e−x cosx)
(−2, 1,−1) +[
1 − e−x(sen x + cosx)]
(1,−1, 0)
=(
e−x(cosx − sen x), e−x senx, e−x cosx)
.
Nota: Otra forma (mas larga) de llegar a esta solucion es teniendo en cuenta que un sistema fundamentalde soluciones del sistema esta dado por
{
v1, Re[
v2 e(−1+i)x]
, Im[
v3 e(−1+i)x]}
, siendo v1 y v2 autovectorescorrespondientes a los autovalores 0 y −1 + i, respectivamente. Calculando dichos autovectores se obtiene(modulo sendas constantes multiplicativas) v1 = (0, 1, 0) y v2 = (1 + i,−i, 1), lo que proporciona el sistemafundamental de soluciones
y1(x) = (0, 1, 0) , y2(x) = e−x(
cosx − sen x, sen x, cosx)
, y3(x) = e−x(
cosx + sen x,− cosx, sen x)
.
La solucion general del sistema es por tanto y(x) = c1y1(x) + c2y
2(x) + c3y3(x), con ci ∈ R. La solucion
particular pedida se obtiene imponiendo que y(0) = (1, 0, 1), es decir (1, 0, 1) = c1(0, 1, 0) + c2(1, 0, 1) +c3(1,−1, 0). Resolviendo este sistema lineal en c1, c2 y c3 se obtiene c1 = c3 = 0, c2 = 1. La solucion pedidaes por tanto y2(x).
ii) La estabilidad del sistema inhomogeneo es la misma que la del homogeneo. Los autovalores de la matrizdel sistema homogeneo tienen todos parte real ≤ 0, y el unico de ellos con parte real 0 (λ1 = 0) es simple. Portanto el sistema (tanto el homogeneo como el completo) es estable, aunque no asintoticamente.

3. Dada la ecuacion 4 xu′′ + 2 u′ + u = 0 (con x > 0), se pide:
i) Hallar el desarrollo en serie de una solucion que sea analıtica en x = 0, expresando dicha solucion enterminos de funciones elementales.
ii) Sin utilizar desarrollos en serie, hallar una solucion linealmente independiente de la anterior. [2.5 puntos]
i) La ecuacion dada tiene un punto singular regular en el origen, ya que es de la forma x2u′′+x p(x)u′+q(x)u =0, con
p(x) =1
2, q(x) =
x
4
funciones analıticas en x = 0. Al ser p0 = p(0) = 12 y q0 = q(0) = 0, la ecuacion indicial
r(r − 1) +1
2r = r
(
r − 1
2
)
= 0
tiene por raıces r1 = 12 y r2 = 0. Como r1 − r2 no es un entero, la ecuacion posee una solucion analıtica en el
origen u(x) =∑
∞
k=0 ckxk. Sustituyendo en la ecuacion (multiplicada por x) se obtiene
∞∑
k=0
[
4k(k − 1) + 2k]
ckxk +
∞∑
k=0
ckxk+1 =
∞∑
k=1
[
2k(2k − 1)ck + ck−1
]
xk = 0 ,
de donde se deduce facilmente la relacion de recurrencia
ck = − ck−1
2k(2k − 1), k = 1, 2, . . .
Tomando c0 = 1 queda
ck =(−1)k
(2k)!, k = 0, 1, . . . ,
y por tanto
u(x) =∞∑
k=0
(−x)k
(2k)!
x>0=
∞∑
k=0
(−1)k
(2k)!(√
x)2k = cos(√
x) .
ii) Una solucion de la ecuacion linealmente independiente de la anterior esta dada por
u2(x) = cos(√
x)
∫ x e−∫
tds
2s
cos2(√
t)dt = cos(
√x)
∫ x t−1/2
cos2(
t1/2) dt = 2 cos(
√x)
∫
√
x dz
cos2 z
= 2 cos(√
x)(
tan(√
x) + c)
= 2 sen(√
x) + 2c cos(√
x) , c ∈ R .
Por tanto las funciones sen(√
x) y cos(√
x) forman un sistema fundamental de soluciones de la ecuacion.
Nota: Otra forma de obtener este resultado, sugerida por la solucion del primer apartado, es efectuar el cambiode variable t =
√x. En efecto, si u(x) = y(t) dicho cambio transforma la ecuacion dada en la y′′ + y = 0, cuya
solucion general es y(t) = c1 cos t+ c2 sen t. Deshaciendo el cambio se obtiene u(x) = c1 cos(√
x)+ c2 sen(√
x),como antes.

4. Considerese la ecuacion 3(1 + x2)u′′ + 2 xu′ = 0.
i) Hallar los tres primeros terminos del desarrollo en serie de una solucion no trivial que se anule en x = 0.
ii) Determinar si todas las soluciones estan acotadas para x → ∞. [2.5 puntos]
i) Los coeficientes de la ecuacion
a1(x) =2x
3(1 + x2), a0(x) = 0
son analıticos en x = 0, por lo que dicho punto es regular. Todas las soluciones de la ecuacion son portanto analıticas en el origen. Sustituyendo en la ecuacion el desarrollo en serie de Taylor de la solucionu(x) =
∑
∞
k=0 ckxk se obtiene
∞∑
k=0
[
3k(k − 1) + 2k]
ckxk + 3
∞∑
k=0
k(k − 1)ckxk−2 =
∞∑
k=0
[
k(3k − 1)ck + 3(k + 1)(k + 2)ck+2
]
xk = 0 .
La relacion de recurrencia para los coeficientes ck es
ck+2 = − k(3k − 1)
3(k + 1)(k + 2)ck, k = 1, 2, . . . .
Al ser u(0) = 0 el coeficiente c0 debe anularse, lo cual implica, por la relacion de recurrencia, que c2n = 0 paratodo n. Tomando (por ejemplo) c1 = 1 de la relacion de recurrencia obtenemos
c3 = −1
9, c5 = −2
5c3 =
2
45.
Por tanto u(x) = x − x3
9+
2x5
45+ O(x7).
ii) Para estudiar la ecuacion en el punto del infinito, hacemos el cambio t = 1/x. Si y(t) = u(x) se tiene
u′(x) = − 1
x2y′(t) = −t2y′(t) , u′′(x) = −
(
t2y′′(t) + 2t y′(t))
(
− 1
x2
)
= t4 y′′(t) + 2t3y′(t) .
La ecuacion dada se convierte por tanto en la siguiente:
3t(t2 + 1)y′′ + 2(3t2 + 2)y′ = 0 .
Esta ecuacion tiene un punto singular regular en el origen, con
p(t) =2(3t2 + 2)
3(t2 + 1), q(t) = 0 .
Como p0 = p(0) = 43 y q0 = q(0) = 0, la ecuacion indicial es r(r − 1) + 4
3 r = r(
r + 13 ) = 0, con raıces r1 = 0 y
r2 = − 13 . Al ser r1 − r2 /∈ N, la ecuacion admite un sistema fundamental de soluciones de la forma
y1(t) =
∞∑
k=0
ck tk , y2(t) = |t|−1
3
∞∑
k=0
dk tk
o, deshaciendo el cambio,
u1(x) =
∞∑
k=0
ck
xk, u2(x) = |x|
1
3
∞∑
k=0
dk
xk.
En particular, solo las soluciones proporcionales a u1 estan acotadas para x → ∞.
Nota: La ecuacion puede resolverse por cuadraturas, ya que es de variables separadas en u′:
u′′
u′= − 2x
3(1 + x2)=⇒ log |u′| = −1
3log
(
1 + x2)
+ log |k2| =⇒ u = k1 + k2
∫ x
(1 + t2)−1
3 dt ,
con k1, k2 ∈ R. Al ser∫ x
(1 + t2)−1
3 dt divergente en x = +∞, las soluciones acotadas para |x| → ∞ son lasconstantes (k2 = 0).

ECUACIONES DIFERENCIALES I Grupo D 20 de septiembre de 2004
Apellidos: D.N.I.:
Nombre: Firma:
1. Dada la ecuacion y′ = y− y3, se pide: (i) Hallar su solucion general. (ii) Determinar cuantas soluciones satis-facen: a) y(0) = 0; b) y(0) = −1. (iii) Dibujar aproximadamente la grafica de sus soluciones. [2.5 puntos]
(i) La ecuacion dada es de Bernoulli y tambien de variables separadas. Integrandola por este ultimo procedi-miento se obtiene
y 6= 0,±1 =⇒ x =∫
dyy(1− y2)
=∫ [
1y− 1
2
(1
y + 1+
1y − 1
)]dy = log |y| − 1
2log∣∣y2 − 1
∣∣+ x0
=⇒ y2 − 1y2
= ±e−2(x−x0) =⇒ y = ± 1√1− c e−2x
, c ≡ ±e2x0 ∈ R− {0} .
(La integracion como ecuacion de Bernoulli es tambien inmediata:
u = y−2 =⇒ u′ = −2y−3y′ = 2(1−u) =⇒ u = 1−c e−2x (c ∈ R) =⇒ y = ± 1√u
= ± 1√1− c e−2x
.)
Notese que y = 0 e y = ±1 son soluciones particulares de la ecuacion que no estan recogidas en la expresionanterior de la solucion general (si bien las soluciones y = ±1 se pueden obtener a partir de dicha expresionhaciendo c = 0). Observese tambien que el doble signo que aparece en la formula anterior es consecuencia delhecho, evidente a partir de la forma de la ecuacion, que si y(x) es solucion tambien lo sera −y(x).
(ii) La funcion f(x, y) = y−y3 es de clase C∞ en todo R2, por lo que esta garantizada la existencia y unicidad(local) de solucion del problema de valor inicial asociado a la ecuacion, para cualquier dato inicial (x0, y0).Notese, en particular, que las soluciones de los problemas propuestos son y = 0 e y = −1.
(iii) Las soluciones de la ecuacion dada son crecientes si y < −1 o 0 < y < 1. Como el miembro derechof(x, y) no depende de x, si y(x) es solucion entonces y(x − x0) tambien lo es, para todo x0 ∈ R. En otraspalabras, trasladando la grafica de una solucion en la direccion del eje x se obtiene la grafica de otra solucion.Por ultimo, por el teorema de existencia y unicidad las graficas de las soluciones no pueden cortar las rectasy = 0,±1. Teniendo esto en cuenta se obtiene facilmente el dibujo de la figura.
-3 -2 -1 1 2 3
-4
-3
-2
-1
1
2
3
4
Notese que las soluciones cuya grafica esta en las regiones |y| > 1 corresponden a valores positivos de c en laexpresion de la solucion general, y por tanto todas ellas desarrollan una asıntota vertical x = 1
2 log c, y estandefinidas unicamente para x > 1
2 log c. Tambien puede ser de ayuda para realizar el dibujo tener en cuentaque
y′′ = (1− 3y2)y′ = (1− 3y2)(y − y3) ,por lo que los puntos de inflexion de las graficas de las soluciones estan sobre las rectas horizontales y = ± 1√
3.

2. Hallar la solucion del sistema
{x′ = x+ 2yy′ = 4x− y + 9t
que verifica x(0) = 3, y(0) = 2. [2 puntos]
Se trata de un sistema lineal inhomogeneoX ′(t) = AX(t)+f(t), conX =(xy
), A =
(1 24 −1
), f(t) =
(09t
).
La solucion pedida es por tanto
X(t) = etAX(0) +∫ t
0
e(t−s)Af(s) ds , X(0) =(
32
).
El polinomio caracterıstico de la matriz A es det(A− λ) = λ2 − 9, con autovalores λ = ±3. Por tanto
etA = P
(e3t 00 e−3t
)P−1 ,
donde las columnas de P son autovectores correspondientes a los autovalores λ = 3 y λ = −3, respectivamente.Calculando dichos autovectores se obtiene
P =(
1 11 −2
)=⇒ etA =
13
(1 11 −2
)(e3t 00 e−3t
)(2 11 −1
)=
13
(2e3t + e−3t e3t − e−3t
2(e3t − e−3t) e3t + 2e−3t
).
Por tanto
X(t) =13
(8e3t + e−3t
8e3t − 2e−3t
)+ 3
∫ t
0
s
(e3(t−s) − e3(s−t)
e3(t−s) + 2e3(s−t)
)ds =
13
(8e3t + e−3t
8e3t − 2e−3t
)+
13
(−6t+ e3t − e−3t
3t− 3 + e3t + 2e−3t
)=(
3e3t − 2t3e3t + t− 1
).

3. Considerese la ecuacion u(n) + 6u′ + 20u = cos(3x). (i) Hallar su solucion general para n = 3. (ii) Estudiarla estabilidad de la ecuacion para n = 2, 3 y 4. [2.5 puntos]
(i) Para n = 3, el polinomio caracterıstico de la ecuacion es p(λ) = λ3 + 6λ + 20, que tiene una raız enteraλ = −2. Dividiendo por λ+ 2 se calculan las demas raıces:
p(λ) = (λ+ 2)(λ2 − 2λ+ 10) = 0 ⇐⇒ λ = −2 , 1± 3i .
La solucion general de la ecuacion homogenea es por tanto
u0(x) = c1 e−2x + ex(c2 cos(3x) + c3 sen(3x)
).
La solucion general de la inhomogenea es u(x) = u0(x) + uP(x), siendo uP una solucion particular de lainhomogenea. Al ser el termino inhomogeneo cos(3x) = Re e3ix, uP(x) = Re v(x), donde v(x) es una solucionparticular de v′′′ + 6v′ + 20v = e3ix, que se puede hallar por el metodo de los coeficientes indeterminados.Como 3i no es raız del polinomio caracterıstico de la ecuacion homogenea, ensayamos una solucion de la formav(x) = a e3ix, donde a se calcula sustituyendo en la ecuacion:
v′′′ + 6v′ + 20v = (−27i + 18i + 20)a e3ix = e3ix ⇐⇒ a =1
20− 9i=
20 + 9i481
.
Por tanto
uP(x) = Re(
20 + 9i481
e3ix
)=
1481
(20 cos(3x)− 9 sen(3x)
).
(ii) Para n = 2 la ecuacion es asintoticamente estable, ya que en ese caso el polinomio caracterıstico λ2+6λ+20es de grado 2 y tiene todos los coeficientes positivos. Para n = 3 la ecuacion es inestable, ya que en ese casoel polinomio caracterıstico posee dos raıces con parte real positiva 1 ± 3i (vease el apartado anterior). Paran = 4 la ecuacion es tambien inestable, ya que en tal caso p(λ) = λ4 + 6λ+ 20, y la matriz de Routh–Hurwitz
0 1 0 06 0 0 10 20 6 00 0 0 20
tiene menores principales estrictamente negativos (los de orden 2, 3 y 4).
Nota: Se puede probar mediante un sencillo argumento que la ecuacion es inestable para todo n ≥ 3. Enefecto, si n ≥ 3 el coeficiente de λn−1 en p(λ) es 0, por lo que la ecuacion no puede ser asintoticamente estable.Por tanto si la ecuacion fuera estable tendrıa que tener algun autovalor λ = iω con parte real 0. Sustituyendoen el polinomio caracterıstico se obtendrıa
0 = p(iω) = inωn + 6iω + 20 ,
lo que es imposible, ya que in es real (si n es par) o imaginario puro (para n impar).

4. Sea la ecuacion xu′′ + u = 0 (con x > 0). (i) Hallar el termino general del desarrollo en serie de unasolucion no trivial u1 que se anule en x = 0. (ii) Probar que hay una solucion independiente de u1 de la formaa u1(x) log x+
∑∞k=0 ckx
k+r, y calcular r y a. [3 puntos]
(i) La ecuacion dada es de la forma x2 u′′+x p(x)u′+ q(x)u = 0, con p(x) = 0 y q(x) = x analıticas en x = 0.Por tanto x = 0 es un punto singular regular, con ecuacion indicial
r(r − 1) + p(0)r + q(0) ≡ r(r − 1) = 0 =⇒ r1 = 1 , r2 = 0 .
Al ser r1 − r2 = 1 ∈ N, por el teorema de Frobenius la ecuacion posee un sistema fundamental de solucionesde la forma
u1(x) =∞∑
k=0
bk xk+1 , u2(x) = a u1(x) log x+
∞∑k=0
ck xk ,
con c0 = d0 = 1. Al ser limx→0 x log x = 0, las soluciones que se anulan en x = 0 son las proporcionales a u1.Para calcular esta ultima solucion se sustituye en la ecuacion diferencial, obteniendose
∞∑k=0
k(k + 1)bk xk +∞∑
k=0
bk xk+1 =
∞∑n=1
[n(n+ 1)bn + bn−1
]xn = 0 .
La relacion de recurrencia es por tanto
bn = − 1n(n+ 1)
bn−1 , n = 1, 2, . . . ,
cuya solucion (teniendo en cuenta que b0 = 1) es
bn =(−1)n
n!(n+ 1)!, n = 1, 2, . . . .
Las soluciones pedidas son por tanto las de la forma
b
∞∑k=0
(−1)kxk+1
k!(k + 1)!, con b 6= 0 .
(ii) Las soluciones de la forma buscada son las proporcionales a u2, por lo que en particular r = 0. Paracalcular a basta sustituir u2 en la ecuacion y utilizar que u1 es solucion:
u′′2 = a u′′1(x) log x− a
x2u1+
2axu′1+
∞∑k=0
k(k−1)ck xk−2 =⇒∞∑
k=0
k(k−1)xk +∞∑
k=0
ck xk+1+2axu′1−au1 = 0 .
El coeficiente de x0 en esta expresion se anula identicamente. Igualando a cero el coeficiente de x (teniendo encuenta que c0 = 1) se obtiene:
c0 + 2a− a ≡ 1 + a = 0 =⇒ a = −1 .