geometrÍa plana. vectoresº eso – geometrÍa plana vectores departamento de matemÁticas. sagrado...
TRANSCRIPT

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
1
GEOMETRÍA PLANA. VECTORES
1.- POLÍGONOS
Polígono: Parte del plano limitada por una línea poligonal cerrada.
Lado: Segmento que une dos vértices consecutivos. En un polígono el número de lados y el número de
vértices es el mismo.
Diagonal: Segmento que une dos vértices no consecutivos. El
número de diagonales de un polígono se puede calcular mediante la
fórmula: 2
3)n(nD
Ángulo interior: Es el formado por dos lados consecutivos. La
suma de todos ellos se calcula mediante la expresión: 2)n(180Sn
Ángulo exterior: Es el formado por un lado y la prolongación de
otro consecutivo. La suma de todos es 360º.
2.- CLASIFICACIÓN DE LOS POLÍGONOS
Los polígonos se pueden clasificar por diferentes características:
.- Según la medida de sus ángulos interiores:
- Convexo: todos los ángulos interiores miden menos de 180º. Son los polígonos que
estudiaremos habitualmente, no presentan “entrantes”.
- Cóncavo: algún ángulo interior mide más de 180º. No los trabajaremos, presentan
“entrantes”.
.- Según el número de lados:
- Triángulo: tres lados
- Cuadrilátero: cuatro lados
- Pentágono: cinco lados
- Hexágono, heptágono, octógono, eneágono, decágono…
.- Según su forma:
- Equilátero: tiene todos los lados iguales. (El rombo es equilátero pero no es equiángulo)
- Equiángulo: tiene todos los ángulos iguales. (El rectángulo es equiángulo pero no es equilátero)
- Regular: tiene todos los lados y ángulos iguales. (El cuadrado es equiángulo, es equilátero y por lo tanto es regular)
Los polígonos de tres lados, triángulos, y de cuatro lados, cuadriláteros, son los más habituales, por ello es
necesario conocer sus nombres y clasificación.
TRIÁNGULOS
.- Según sus lados:
- Triángulo Equilátero: los tres lados iguales.
- Triángulo Isósceles: dos lados iguales.
- Triángulo Escaleno: los tres lados distintos.
.- Según sus ángulos:
- Triángulo Rectángulo: tiene un ángulo recto (es imposible tener dos
ángulos rectos) y dos agudos.
- Triángulo Acutángulo: tiene los tres ángulos agudos.
- Triángulo Obtusángulo: tiene un ángulo obtuso (y por lo tanto los otros
dos deben ser agudos).
CUADRILÁTEROS
Los cuadriláteros se clasifican en:
- Paralelogramos: tienen dos pares de lados paralelos dos a dos. Estos pueden ser:
- Cuadrado: tiene los cuatro lados y los cuatro ángulos iguales (son ángulos rectos).

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
2
- Rectángulo: tiene los cuatro ángulos iguales (son
ángulos rectos), los lados son iguales dos a dos.
- Rombo: tiene los cuatro lados iguales, los ángulos son
iguales dos a dos (dos agudos y dos obtusos que son suplementarios, suman 180º, entres sí).
- Romboide: tiene dos lados y dos ángulos iguales dos a dos (dos agudos y dos obtusos que son
suplementarios, suman 180º, entres sí).
- Trapecios: tienen un par de lados paralelos. Estos pueden ser:
- Trapecio Rectángulo: tiene dos ángulos
rectos. Surge al cortar un triángulo rectángulo.
- Trapecio Isósceles: tiene iguales los lados
no paralelos. Surge al cortar un triángulo isósceles.
- Trapecio Escaleno: tiene distintos los lados no paralelos. Surge al cortar un triángulo escaleno.
- Trapezoide: no tiene lados paralelos.
3.- SEMEJANZA DE POLÍGONOS
Definición _ Dos polígonos son semejantes si tienen los lados proporcionales y los ángulos iguales.
Para estudiar polígonos no regulares o incluso regulares se suelen triangular, es decir, trocear en triángulos y
estudiar estos de forma independiente, por ello, se tiende al estudio del triángulo, como polígono básico, y a partir de
los resultados obtenidos en los triángulos se analizan los polígonos.
Veamos la definición y los criterios de semejanza para triángulos.
Definición _ Dos triángulos son semejantes si tienen los tres lados proporcionales y los tres ángulos
iguales. Por tanto hay que comparar 12 elementos, seis de un triángulo y seis de otro.
Criterios _ Un criterio es una norma que permite llegar a la misma conclusión con menos esfuerzo, no
tendremos que comparar 12 elementos sino algunos menos para concluir que dos triángulos son semejantes.
Criterio 1: Dos triángulos son semejantes si tienen los tres lados proporcionales.
Criterio 2: Dos triángulos son semejantes si tienen dos lados proporcionales y el ángulo comprendido igual.
Criterio 3: Dos triángulos son semejantes si tienen dos ángulos iguales.
EJEMPLO_ Dado un triángulo rectángulo de catetos 3 cm y 4 cm y otro triángulo de lados 4´2 cm, 5´6cm y 7 cm.
Indica, aplicando algún criterio de semejanza, si son semejantes.
PRIMERA FORMA:
TRIÁNGULO I: Rectángulo de catetos 3 cm y 4 cm.
Calculamos el tercer lado aplicando el teorema de Pitágoras “a2 + b2 = c2”:
32 + 42 = c2 ⇒ 9 + 16 = c2 ⇒ cm 5c 25 c 169 c
Por tanto los lados del triángulo I miden 3 cm, 4 cm y 5 cm.
TRIÁNGULO II: Sus lados miden 4´2 cm, 5´6 cm y 7 cm.
Como conocemos los tres lados de cada uno aplicamos el criterio “Dos
triángulos son semejantes si tienen los tres lados proporcionales”: 4,15
7
4
5´6
3
4´2 , como todos los
cocientes son iguales los lados son proporcionales y por lo tanto los triángulos I y II son SEMEJANTES.
En el dibujo como no sabíamos si eran semejantes o no se han dibujado ambos triángulos con la información
que se tenía en ese momento, da igual que no sean correctos los dibujos, siempre que no sean descabellados.
NOTA: Cuando comparamos lados de dos triángulos se pueden comparar los lados del triángulo grande con
los lados del triángulo pequeño o del pequeño con el grande, al número obtenido (en este caso 1´4) se le llama razón
de proporcionalidad, pero esta no es única, pues si se comparan al revés la razón será su inversa. En la práctica se
puede tomar una u otra indiferentemente (salvo que nos lo indiquen en el enunciado), nos guiamos por la comodidad
del cálculo, en este caso, si se hubieran tomado al revés el cálculo hubiera sido más farragoso:
...7142857,07
5
5´6
4
4´2
3

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
3
SEGUNDA FORMA:
TRIÁNGULO I: Rectángulo de catetos 3 cm y 4 cm.
TRIÁNGULO II: Sus lados miden 4´2 cm, 5´6 cm y 7 cm.
En este caso vamos a comprobar si el segundo triángulo es rectángulo. Aplicando el teorema de Pitágoras:
4´22 + 5´62 = 72 ⇒ 17´64 + 31`36 = 49 ⇒ 49 = 49 ⇒ El triángulo II también es rectángulo de catetos 4´2 cm y
5´6 cm y de hipotenusa 7 cm.
Como conocemos los catetos de ambos triángulos y el ángulo comprendido entre ellos (el ángulo recto en ambos),
aplicamos el criterio “Dos triángulos son semejantes si tienen dos lados
proporcionales y el ángulo comprendido igual”: 4,14
5´6
3
4´2 , como
ambos cocientes son iguales los lados son proporcionales y por lo tanto los
triángulos I y II son SEMEJANTES.
Los dibujos correctos de ambos triángulos serían los de esta figura, con toda la información obtenida a posteriori.
4.- TEOREMAS APLICADOS A TRIÁNGULOS
4.1 Teorema de Tales
El teorema de Tales dice lo siguiente: “Si dos rectas secantes (que se cortan), son
cortadas a su vez por dos o más rectas paralelas entre sí, éstas últimas generan en las primeras
segmentos proporcionales”.
En la imagen se puede observar que las rectas paralelas producen cuatro segmentos,
proporcionales entre sí: 12
6
10
5 o también
12
10
6
5
En la práctica este teorema se aplica en triángulos y conviene retomar lo que dice el teorema de Tales para
enunciarlo del siguiente modo: “Si en un triángulo se traza una recta paralela a uno de sus lados, se origina un
triángulo semejante al primero y de menor tamaño”.
EJEMPLO_ Calcula el valor de x e y en la siguiente figura.
Para calcular “x” e "y" podemos aplicar el teorema de Tales:
18
x
12
20 12 x = 20 · 18 x = m 30
12
360
12
1820
Para calcular “y” no podemos aplicar el teorema de Tales, (el
lado BC y el lado DE son los paralelos y el teorema de Tales habla de
segmentos proporcionales formados sobre los lados secantes que son AC
y AB):
y
36
18
x
12
20 20 y = 12 · 36 y = m 621
20
432
20
3612
Por tanto para calcular “y”, y
también “x” debemos atender a la
semejanza de triángulos, por el
teorema de Tales los triángulos ABC y
ADE son semejantes y sus lados son
proporcionales:
m 65720
152.1
20
3236y3236y20
m 3012
360x360x12x32360x20x3218x20
y
36
18x
x
32
20

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
4
4.2 Teorema de PITÁGORAS
Dado un triángulo rectángulo se cumple: a2 + b2 = c2
EJEMPLO_ Calcula el área de un triángulo rectángulo de cateto 20 cm y de hipotenusa 29 cm.
Calculamos el otro cateto aplicando el teorema de Pitágoras “a2 + b2 = c2”:
202 + x2 = 292 ⇒ 400 + x2 = 841 ⇒ cm 21x 441 x 400841 x
5.- PUNTOS Y RECTAS NOTABLES EN TRIÁNGULOS
5.1 Mediatrices y circuncentro
.- MEDIATRIZ: es la recta perpendicular a un lado por su punto medio.
.- CIRCUNCENTRO: es el punto de corte de las mediatrices, está situado a la misma distancia de los tres
vértices y es el centro de la circunferencia circunscrita.
5.2 Bisectrices e incentro
.- BISECTRIZ: es la recta que divide a un ángulo por la mitad.
.- INCENTRO: es el punto de corte de las bisectrices, está situado a la misma distancia de los tres lados, y es
el centro de la circunferencia inscrita.
5.3 Medianas y baricentro
.- MEDIANA: es la recta que une un vértice con el punto medio del lado opuesto.
.- BARICENTRO: es el punto de corte de las medianas. Es el punto de equilibrio del triángulo. Se cumple que
desde el baricentro a un vértice hay el doble de distancia que del baricentro al punto medio de lado opuesto.
5.4 Alturas y ortocentro
.- ALTURA: es la recta perpendicular desde un vértice hasta su lado opuesto o su prolongación.
.- ORTOCENTRO: es el punto de corte de las alturas. No cumple nada particular.
En un triángulo equilátero los cuatro puntos coinciden. Las circunferencias inscritas y circunscritas son concéntricas. Mediatriz, bisectriz,
mediana y altura son la misma recta.
6.- ÁREAS DE POLÍGONOS
6.1 Área del cuadrado
Siendo “l” el lado de un cuadrado su área será: Acuadrado = l2
6.2 Área del rectángulo
Siendo “b” la base del rectángulo y “h” la altura del rectángulo su área será: Arectángulo = b · h
6.3 Área del triángulo
Siendo “b” la base del triángulo y “h” la altura del triángulo su área será: 2
hbA
triángulo

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
5
6.4 Área del rombo
Siendo “D” la diagonal mayor del rombo y “d” la diagonal menor del rombo su área será: 2
dDA
rombo
6.5 Área del romboide
Siendo “b” la base del romboide y “h” la altura del romboide su área será: Aromboide = b · h
6.6 Área del trapecio
Siendo “B” la base mayor del trapecio, “”b” la base menor del trapecio y “h” la altura del trapecio su área
será: 2
hb)(BA
trapecio
6.7 Área del polígono regular
Siendo “P” el perímetro (suma de todos los lados, que son iguales por ser regular) del polígono regular y “ap”
la apotema (segmento que une el centro del polígono con el punto medio de un lado) del polígono regular su área
será: 2
aPA
p
polígono
7.- ÁREAS y LONGITUDES DE FIGURAS CIRCULARES
Una circunferencia se define como el lugar geométrico (un lugar geométrico es un conjunto de puntos que
cumplen una misma propiedad) de los puntos que están a la misma distancia de uno que llamamos centro “C”. La
distancia se llama radio “r”. Por tanto la circunferencia es la línea (longitud) y el círculo es la
superficie (área) en su interior. Otros elementos de la circunferencia son:
.- Radio: “r” une el centro “C” con cualquier punto de la circunferencia.
.- Cuerda: segmento que une dos puntos de la circunferencia.
.- Arco: Parte de la circunferencia comprendida entre dos puntos de la misma.
.- Diámetro: “d” es una cuerda que pasa por el centro de la circunferencia: d = 2r
7.1 Longitud de la circunferencia
Siendo “r” el radio de la circunferencia su longitud será: Lcircunferencia = 2r = d
7.2 Longitud del arco de circunferencia
Siendo “r” el radio de la circunferencia y “n” el número de grados que abarca el arco sobre ella, podemos
calcular la longitud del arco mediante una proporción directa: 360º
nºr 2 L
arco
π
L nº
r2 360º
longitud grados
arco
7.3 Área del círculo
Siendo “r” el radio del círculo su área será: Acírculo = r2
7.4 Área del sector circular
Un sector circular es la superficie del círculo comprendida entre dos radios y el arco correspondiente.
Siendo “r” el radio del círculo y “n” el número de grados que abarca el sector circular, podemos calcular el
área del sector circular mediante una proporción directa: 360º
nºr A
2
sector
π
A nº
r 360º
superficie grados
sector
2

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
6
7.5 Área del segmento circular
Un segmento circular es la superficie del círculo comprendida entre una cuerda y su arco.
Cuando se traza una cuerda se originan dos arcos, uno menor de 180º y otro mayor de 180º, a la hora de
calcular su área esto se debe tener en cuenta.
Siendo “r” el radio del círculo y “n” el número de grados que abarca el arco:
.- podemos calcular el área del segmento circular menor de 180º como: Asegmento circular = Asector - Atriángulo
.- podemos calcular el área del segmento circular mayor de 180º como: Asegmento circular = Asector + Atriángulo
7.6 Área de la corona circular
Una corona circular es la superficie comprendida entre dos circunferencias concéntricas.
Siendo “R” el radio de la circunferencia mayor y “r” el radio de la circunferencia menor, podemos calcular el
área de la corona circular como: Acorona circular = Acírculo mayor - Acírculo menor = R2 - r2 = · (R2 - r2)
7.7 Área del trapecio circular
Un trapecio circular es la superficie de una corona circular comprendida entre dos radios.
Siendo “R” el radio de la circunferencia mayor, “r” el radio de la circunferencia menor y “n” el número de
grados que abarcan los dos radios, podemos calcular el área del trapecio circular mediante una proporción directa:
360º
nº)r(R A
22
circular trapecio
π
A nº
r(R 360º
superficie grados
circular trapecio
)22
8.- VECTORES EN EL PLANO
* Un vector fijo BA
es un segmento que comienza en A (origen) y termina en B (extremo). Si el vector es el
AB
, entonces el origen es B y el extremo es A. Los elementos que determinan un vector son:
.- MÓDULO de BA
: Es la longitud del vector BA
. Se denota por BA
.
.- DIRECCIÓN de BA
: Es la dirección de la recta que pasa por A y por B. Todas las paralelas
con ella tienen la misma dirección.
.- SENTIDO de BA
: Cada dirección tiene dos sentidos, de A a B o de B a A.
8.1 Coordenadas de un vector
Dado un punto A (xa , ya) y un punto B (xb , yb) se calculan las coordenadas del vector BA
, restando las
coordenadas del primer punto a las coordenadas del segundo punto: BA
( xb–xa , yb–ya)
EJEMPLO_ Calcula las coordenadas del vector BA
siendo A(3,1) y B(7,4).
Restamos las coordenadas de A a las de B: BA
= (7–3 , 4–1) = (4,3)
Cualquier vector u
que tenga coordenadas u
=(4,3), será un vector
equipolente (mismo módulo, misma dirección y mismo sentido) al VECTOR
FIJO BA
, además todos estos vectores forman lo que llamamos VECTOR LIBRE de
coordenadas (4,3) y son todos los vectores que tengan esas coordenadas. De todos
ellos hay uno especial, aquel cuyo origen se encuentra en el origen de coordenadas O (0,0), ya que ese vector tendrá
el extremo en un punto P cuyas coordenadas son justamente las del vector (4,3), a este vector PO
se le llama vector
de posición del punto P. Por ello para distinguir un vector PO
de coordenadas (4,3) de un punto P de coordenadas
(4,3) deberemos guiarnos por el contexto que nos marque el enunciado del problema.
3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
7
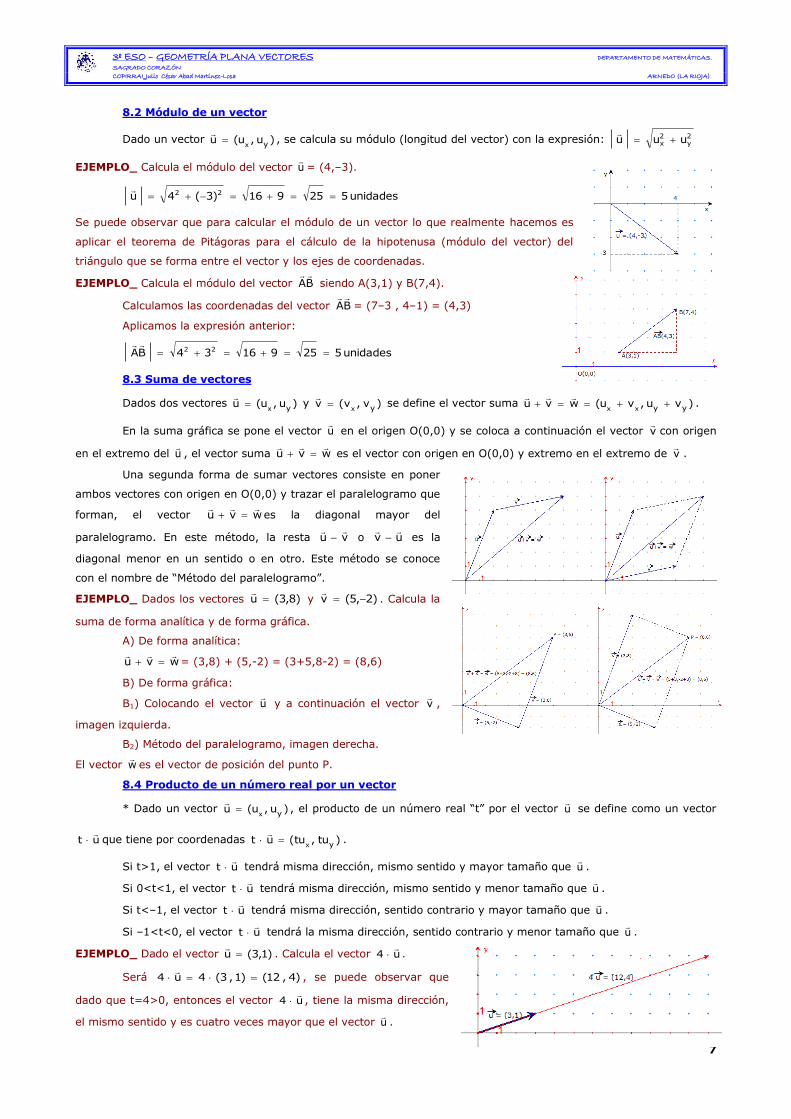
8.2 Módulo de un vector
Dado un vector )u,u(uyx
, se calcula su módulo (longitud del vector) con la expresión: 2y
2x uu u
EJEMPLO_ Calcula el módulo del vector u
= (4,–3).
unidades 525916)3(4 u 22
Se puede observar que para calcular el módulo de un vector lo que realmente hacemos es
aplicar el teorema de Pitágoras para el cálculo de la hipotenusa (módulo del vector) del
triángulo que se forma entre el vector y los ejes de coordenadas.
EJEMPLO_ Calcula el módulo del vector BA
siendo A(3,1) y B(7,4).
Calculamos las coordenadas del vector BA
= (7–3 , 4–1) = (4,3)
Aplicamos la expresión anterior:
unidades 52591634 BA 22
8.3 Suma de vectores
Dados dos vectores )u,u(uyx
y )v,v(vyx
se define el vector suma )vu,vu(wvuyyxx
.
En la suma gráfica se pone el vector u
en el origen O(0,0) y se coloca a continuación el vector v
con origen
en el extremo del u
, el vector suma wvu
es el vector con origen en O(0,0) y extremo en el extremo de v
.
Una segunda forma de sumar vectores consiste en poner
ambos vectores con origen en O(0,0) y trazar el paralelogramo que
forman, el vector wvu
es la diagonal mayor del
paralelogramo. En este método, la resta vu
o uv
es la
diagonal menor en un sentido o en otro. Este método se conoce
con el nombre de “Método del paralelogramo”.
EJEMPLO_ Dados los vectores )8,3(u
y )2,5(v
. Calcula la
suma de forma analítica y de forma gráfica.
A) De forma analítica:
wvu
= (3,8) + (5,-2) = (3+5,8-2) = (8,6)
B) De forma gráfica:
B1) Colocando el vector u
y a continuación el vector v
,
imagen izquierda.
B2) Método del paralelogramo, imagen derecha.
El vector w
es el vector de posición del punto P.
8.4 Producto de un número real por un vector
* Dado un vector )u,u(uyx
, el producto de un número real “t” por el vector u
se define como un vector
ut
que tiene por coordenadas )tu,tu(utyx
.
Si t>1, el vector ut
tendrá misma dirección, mismo sentido y mayor tamaño que u
.
Si 0<t<1, el vector ut
tendrá misma dirección, mismo sentido y menor tamaño que u
.
Si t<–1, el vector ut
tendrá misma dirección, sentido contrario y mayor tamaño que u
.
Si –1<t<0, el vector ut
tendrá la misma dirección, sentido contrario y menor tamaño que u
.
EJEMPLO_ Dado el vector )1,3(u
. Calcula el vector u4
.
Será 4) , 12()1 , 3(4u4
, se puede observar que
dado que t=4>0, entonces el vector u4
, tiene la misma dirección,
el mismo sentido y es cuatro veces mayor que el vector u
.
3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
8
9.- MOVIMIENTOS EN EL PLANO
Un movimiento es una transformación geométrica en la que a cada punto A se le hace corresponder un punto
A´(homólogo), de manera que las figuras formadas conserven el tamaño y la forma (isometría).
Veamos tres tipos de estos movimientos: traslaciones, giros y simetrías.
9.1 Traslaciones
Dado un vector )u,u(uyx
, se llama traslación de punto A(xa , ya) mediante el vector u
al punto )y,(x A ´a
´a
´
de tal forma que el vector u
sea equipolente (misma dirección, mismo sentido y mismo módulo) con el vector ´AA
.
Se cumple:
yaa
xa´a
uyy
uxx
En ocasiones podemos realizar traslaciones sucesivas de dos o tres vectores de tal forma que si trasladamos
el punto A (xa , ya) mediante traslación de vector )u,u(uyx
se obtiene el punto )y,(x A ´a
´a
´ de siendo u
y ´AA
equipolentes. A continuación se traslada el punto )y,(x A ´a
´a
´ mediante traslación de vector )v,v(vyx
y se obtiene
el punto )y,(x A ´´a
´´a
´´ de manera que v
y ´´´AA
sean equipolentes. Esta traslación sucesiva de dos vectores se puede
sustituir por una sola traslación de vector )w,(ww yx
cumpliéndose que el vector w
y el vector ´´AA
sean
equipolentes y además
)yy,x(x)vu,v(u)w,(w
vuw
a´´aa
´´ayyxxyx
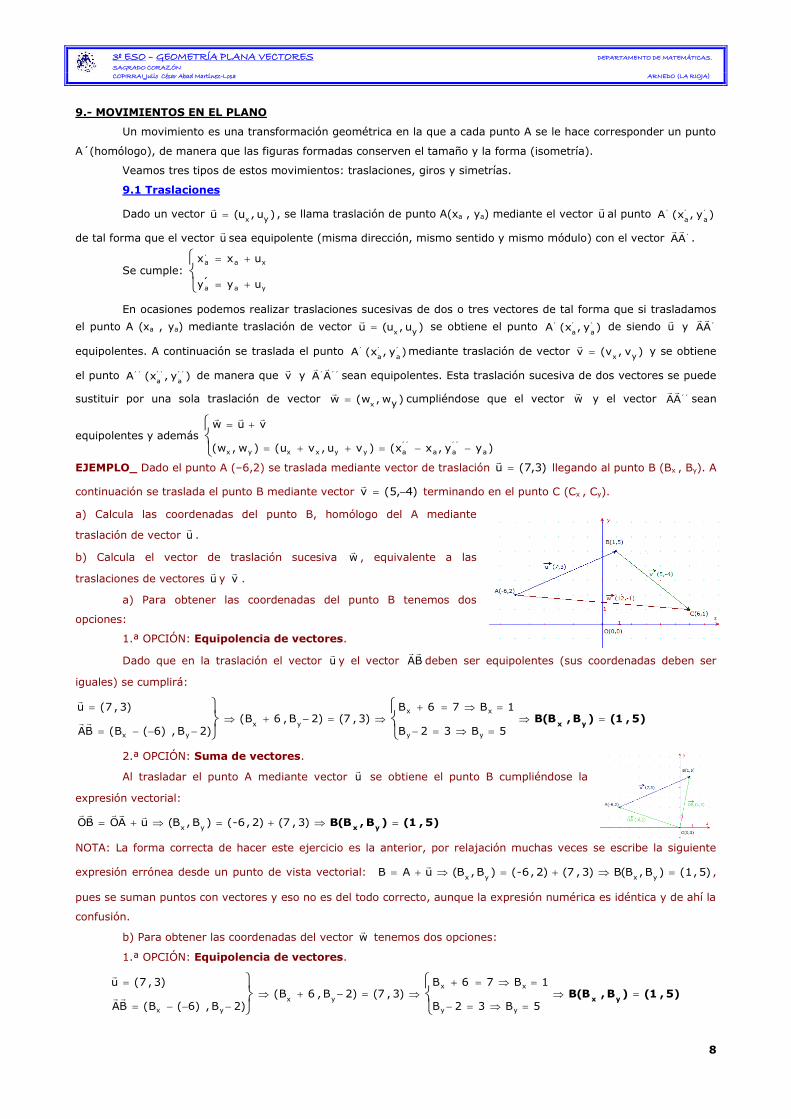
EJEMPLO_ Dado el punto A (–6,2) se traslada mediante vector de traslación (7,3)u
llegando al punto B (Bx , By). A
continuación se traslada el punto B mediante vector 4)(5,v
terminando en el punto C (Cx , Cy).
a) Calcula las coordenadas del punto B, homólogo del A mediante
traslación de vector u
.
b) Calcula el vector de traslación sucesiva w
, equivalente a las
traslaciones de vectores u
y v
.
a) Para obtener las coordenadas del punto B tenemos dos
opciones:
1.ª OPCIÓN: Equipolencia de vectores.
Dado que en la traslación el vector u
y el vector BA
deben ser equipolentes (sus coordenadas deben ser
iguales) se cumplirá:
5) , (1)B , B(Byx
5 B32 B
1 B7 6B)3 , 7()2 B , 6(B
)2 B , )6((BBA
3) , (7u
yy
xx
yx
yx
2.ª OPCIÓN: Suma de vectores.
Al trasladar el punto A mediante vector u
se obtiene el punto B cumpliéndose la
expresión vectorial:
5) , (1)B,B(Byx
)3 , 7(2) , (-6)B,B(uAOBOyx
NOTA: La forma correcta de hacer este ejercicio es la anterior, por relajación muchas veces se escribe la siguiente
expresión errónea desde un punto de vista vectorial: 5) , (1)B,B(B)3 , 7(2) , (-6)B,B(uAByxyx
,
pues se suman puntos con vectores y eso no es del todo correcto, aunque la expresión numérica es idéntica y de ahí la
confusión.
b) Para obtener las coordenadas del vector w
tenemos dos opciones:
1.ª OPCIÓN: Equipolencia de vectores.
5) , (1)B , B(Byx
5 B32 B
1 B7 6B)3 , 7()2 B , 6(B
)2 B , )6((BBA
3) , (7u
yy
xx
yx
yx

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
9
1) , (6)C , C(Cyx
1 C45 C
6 C5 1C)4 , 5()5 C , 1(C
)5 C , 1(CCB
4) , (5v
yy
xx
yx
yx
1) , (12)w ,(wwyx
)21 , )6((6CA
)w , (ww yx
2.ª OPCIÓN: Suma de vectores.
1) , (12)w ,(wwyx
4) , (53) , (7)w,(w
vuw
yx
9.2 Giros
Dado un punto P (xp , yp) y un ángulo α, se llama giro de centro P y ángulo α “G(P, α)” a la transformación que
convierte el punto A (xa , ya) en el punto )y,(x A ´a
´a
´ de tal forma que:
.- el ángulo formado por APA´ es el ángulo α ⇒ α´APA (amplitud del giro)
.- el módulo del vector AP
es igual al módulo del vector ´AP
⇒ APAP
La resolución de este tipo de ejercicio se hará de forma gráfica, quizás en alguna ocasión se nos pidan las
coordenadas del punto A´ homólogo del punto A mediante un giro, G(P, α)(A) = A´, pero se calcularán “a ojo” sin
cálculo matemático, siguiendo lo que el dibujo nos indique.
A la hora de medir un giro debemos tener en cuenta que los giros con el sentido de las agujas del reloj se
consideran giros negativos mientras que los giros con el sentido contrario al movimiento de las agujas del reloj se
consideran un giro positivo.
EJEMPLO_ Dado el punto B (3,0), calcula las coordenadas de sus homólogos B´y B´´ según:
a) un giro de centro el origen de coordenadas y amplitud α = 90º.
b) un giro de centro el origen de coordenadas y amplitud α = –90º.
9.2 Simetrías
Distinguimos dos tipos de simetrías:
.- Simetría axial: es una simetría respecto de un eje. Un punto A (xa , ya) se transforma
en su simétrico )y,(x A ´a
´a
´ siendo el eje de simetría la mediatriz del segmento AA . Para
realizar una simetría axial de una figura (triángulo ABC, por ejemplo) se deben trazar
perpendiculares desde cada vértice al eje de simetría y situar los puntos homólogos (A´,
B´, C´) en la prolongación de dichas perpendiculares de tal forma que la distancia del
punto A al eje sea la misma que la distancia del punto A´ al eje, que la distancia del punto
B al eje sea la misma que la distancia del punto B´ al eje y que la distancia del punto C al
eje sea la misma que la distancia del punto C´ al eje.

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
10
.- Simetría central: es una simetría respecto de un punto P (xp , yp). Un punto A (xa , ya)
se transforma en su simétrico )y,(x A ´a
´a
´ siendo “P” el punto medio del segmento AA . Para
realizar una simetría central de una figura (triángulo ABC, por ejemplo) se debe trazar una
recta que saliendo de A pase por P (centro de simetría) y se coloque A´ en la prolongación
de dicha recta de tal forma que la distancia de A a P se la misma que la distancia de A´ a P.
Debemos hacer lo mismo con los otros dos puntos.
Cuando trabajamos con ejes de coordenadas planteamos tres simetrías:
.- SIMETRÍA RESPECTO DEL EJE DE ABSCISAS: El punto A(xa , ya) se transforma en el punto
)y,(x A ´a
´a
´ de tal forma que se cumple:
aa
a´a
y y
xx, la “x” queda invariante y la “y” cambia de signo.
.- SIMETRÍA RESPECTO DEL EJE DE ORDENADAS: El punto A(xa , ya) se transforma en el punto )y,(x A ´a
´a
´ de tal
forma que se cumple:
aa
a´a
yy
x x, la “x” cambia de signo y la “y” queda invariante.
.- SIMETRÍA RESPECTO DEL ORIGEN DE COORDENADAS: El punto A(xa , ya) se transforma en el punto )y,(x A ´a
´a
´ de
tal forma que se cumple:
aa
a´a
y y
x x, la “x” y la “y” cambian de signo.
EJEMPLO_ Dado el punto A (5,2), calcula las coordenadas de sus homólogos en las siguientes simetrías:
a) Simetría respecto del eje de abscisas _ A´
b) Simetría respecto del eje de ordenadas _ A´´
c) Simetría respecto del origen de coordenadas _ A´´´
d) Simetría respecto del punto P (7,3) _ AIV
a) Simetría respecto del eje de abscisas _ A´:
El punto A´ se obtiene al cambiar de signo la coordenada “y” ⇒ A´(5,–2)
b) Simetría respecto del eje de ordenadas _ A´´:
El punto A´´ se obtiene al cambiar de signo la coordenada “x” ⇒ A´´( –5,2)
c) Simetría respecto del origen de coordenadas _ A´´´:
El punto A´´´ se obtiene al cambiar de signo la coordenada “x” y la coordenada “y” ⇒ A´(–5,– 2)
d) Simetría respecto del punto P (7,3) _ AIV
El punto AIV se obtiene de forma gráfica, utilizando la cuadrícula para pasar de A a P debemos ir dos
cuadrados a la izquierda y dos cuadrados hacia arriba, por tanto para pasar de P a AIV debemos hacer lo mismo y se
finaliza en el punto AIV (1,6).

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
11
NOTAS_ NÚMEROS REALES
* SÍMBOLOS:
_ “Implica” o “quiere decir” o “supone que”, la relación es cierta de izquierda a derecha.
_ “Implica” o “quiere decir” o “supone que”, la relación es cierta de derecha a izquierda.
_ “Doble implica”, la relación es cierta en ambos sentidos.
≠ _ “Distinto” ∞ _ “Infinito” ≈ _ “Aproximado”
_ “Pertenece” _ “No pertenece” / _ “Tal que”
Π _ “Tal que” ∃ _ “Existe” ∄ _ “No existe”
α _ “Alfa” β _ “Beta” _ “Gamma”
* ÁNGULOS EN LA CIRCUNFERENCIA
.- Ángulo central: tiene el vértice en el centro de la
circunferencia y los lados son los radios.
.- Ángulo inscrito: tiene el vértice sobre la circunferencia y
los lados cortan a la circunferencia
.- Ángulo semiinscrito: tiene el vértice sobre la
circunferencia y un lado es tangente a la circunferencia y el otro lado es secante a la
circunferencia.
.- PROPIEDAD: “Un ángulo inscrito que abarca el mismo arco que un ángulo central vale la
mitad de este”.
.- Para dibujar un ángulo recto en una circunferencia basta trazar un ángulo inscrito cuyos
lados pasen por los extremos de un diámetro.
* TEOREMA DEL CATETO (4.º ESO)
Para aplicar este teorema cambiamos la posición habitual del triángulo rectángulo y definimos “n” , “m” y “h”:
.- “n” _ es la proyección del cateto “b” sobre la hipotenusa “c”.
.- “m” _ es la proyección del cateto “a” sobre la hipotenusa “c”.
.- “h” _ es la altura sobre la hipotenusa.
El teorema del cateto dice: “El cuadrado de un cateto es igual al
producto de la hipotenusa por la proyección de dicho cateto sobre la
hipotenusa”:
b2 = n · c o a2 = m · c
*TEOREMA DE LA ALTURA (4.º ESO)
Siguiendo el dibujo del apartado anterior, el teorema de
la altura dice: “El cuadrado de la altura sobre la hipotenusa es
igual al producto de las proyecciones de los catetos sobre la
hipotenusa”: h2 = m · n
Estos dos teoremas se basan en la semejanza de
triángulos, los triángulos I, II, y III son semejantes, por ejemplo,
el triángulo I es rectángulo en C, el triángulo II es rectángulo en
P, además tienen un ángulo en común, el ángulo A, por ello tienen
dos ángulos iguales, entonces son semejantes. Si son semejantes,
(lo mismo ocurre entre I y III y entre II y III) sus lados son
semejantes:

3º ESO – GEOMETRÍA PLANA VECTORES DEPARTAMENTO DE MATEMÁTICAS.
SAGRADO CORAZÓN
COPIRRAI_Julio César Abad Martínez-Losa ARNEDO (LA RIOJA)
12
Entre I y II se cumple: cnbb
c
n
b
b
c
n
b
h
a 2
Entre I y III se cumple: cmaa
c
m
a
a
c
m
a
h
b 2
Entre II y III se cumple: nmhh
n
m
h
h
n
m
h
a
b 2
EJEMPLO_ Calcula el valor de las letras desconocidas en el siguiente triángulo
rectángulo:
.- En el triángulo de la izquierda podemos aplicar el teorema de Pitágoras:
h2 + 182 = 302 h2 + 324 = 900 h2 = 900 – 324 = 576 h = 24 cm
Ahora podemos aplicar:
.- Teorema del cateto: a2 = m · c, pero nos faltan las tres incógnitas.
.- Teorema del cateto: 302 = 18 · c c = 50 cm
.- Teorema de la altura: h2 = 18 · m 242 = 18 · m m = 32 cm
.- c = n + m m = 50 – 18 = 32 cm
.- Para calcular "a", podemos aplicar:
· Teorema del cateto: a2 = 32 · 50 a2 = 1.600 a = 40 cm.
· Teorema de Pitágoras en triángulo mediano: a2 = 242 + 322 a2 = 576 + 1.024 = 1.600 a = 40 cm.
· Teorema de Pitágoras en triángulo grande: a2 + 302 = 502 a2 = 2.500 – 900 = 1.600 a = 40 cm.
Hay varias opciones para poder resolver estos problemas, se trata de acertar con el camino más corto.