exámenes resueltos del curso 2002-03.personal.us.es/julio/fmi/examen/solexamenesfmimec02-03.pdf ·...
TRANSCRIPT
Exámenes Resueltos del Curso 2002-03.
Fundamentos Matemáticos de la Ingeniería.Ingeniería Técnica Industrial. Especialidad Mecánica.

Índice General
Primer Parcial. Curso 2002-03 2
Segundo Parcial. Curso 2002-03 13
Examen de Junio. Curso 2002-03 22
Examen de Septiembre. Curso 2002-03 31
1

Primer Parcial. Curso 2002-03
PROBLEMA 1.-
Dada la matriz A =
1 2 −12 0 0−1 0 a
se pide:
a) (1 punto) ¿Para qué valores de a la matriz A tiene inversa?
b) (2 puntos) ¿Qué condiciones debe cumplir las componentes del vector b =
b1b2b3
para que el
sistema Ax = b tenga solución?
c) (2 puntos) Para a = 2, calcular la inversa de A por el método de Gauss-Jordan.
d) (3 puntos) ¿Para que valores de a el sistema Ax =
−4−a0
tiene solución? Resolver dicho
sistema por el método de Gauss cuando sea compatible indeterminado.
e) (2 puntos) Para a = 0, encontar una base para el espacio columna de la matriz A y una base parael espacio nulo de la matriz A. Los subespacios vectoriales N(A) y R(A) ¿son ortogonales?
Solución
a) Este apartado puede hacerse de dos formas: haciendo transformaciones elementales o medianteel determinante.
1a forma: Haciendo transformaciones elementales: 1 2 −1 1 0 02 0 0 0 1 0−1 0 a 0 0 1
P12−→ 2 0 0 0 1 0
1 2 −1 1 0 0−1 0 a 0 0 1
F1( 12)−→ 1 0 0 0 1
2 01 2 −1 1 0 0−1 0 a 0 0 1
F21(−1)−→F31(1) 1 0 0 0 1
2 00 2 −1 1 −12 00 0 a 0 1
2 1
. (Si a 6= 0 podemos seguir realizando transformaciones elementales).Haríamos
F2( 12)−→F3( 1a)
1 0 0 0 12 0
0 1 −12 12 −14 0
0 0 1 0 12a
1a
. Y la matriz tiene inversa.Si a = 0, el método de Gauss-Jordan no puede continuarse, es decir, la forma escalonada reducidano es la identidad y la matriz A no tiene inversa.
Resumiendo, A posee inversa si y sólo si a 6= 0.2a forma: (En este caso más sencilla)
2

Primer Parcial. Curso 2002-03 3
Calculamos el deteminante de la matriz |A| =¯̄̄̄¯̄ 1 2 −1
2 0 0−1 0 a
¯̄̄̄¯̄ = −2 ¯̄̄̄ 2 −10 a
¯̄̄̄= −4a. Sabemos
que una matriz cuadrada A tiene inversa si y sólo si su determinante es distinto de cero. En estecaso, |A| 6= 0 si y sólo si a 6= 0.
b) Hay que analizar dos posibilidades:
— Si a 6= 0, la matriz A es regular. Por tanto, el sistema Ax = b tiene solución para cualquiervalor del vector b, de aquí que las componentes de b no tengan que cumplir ninguna condiciónpara que el sistema posea solución.
— Si a = 0, la matriz A no es regular. En este caso,“intentamos” resolver el sistema Ax = bpor el método de Gauss: 1 2 −1 b12 0 0 b2−1 0 0 b3
F21(−2)−→F31(1)
1 2 −1 b10 −4 2 b2 − 2b10 2 −1 b3 + b1
F2(− 14)−→ 1 2 −1 b10 1 −12 b2−2b1
−40 2 −1 b3 + b1
F32(−2)−→
1 2 −1 b10 1 −12 b2−2b1
−40 0 0 2b3+b2
2
. Ahora, el sistema Ax = b tiene solución si y sólo si las compo-nentes del vector b = (b1, b2, b3)t cumplen la condición 2b3 + b2 = 0.
Obsérvese que una inspección directa sobre la matriz A para el caso a = 0 nos indica que lasegunda fila de A es (−2) veces la tercera, por lo que el sistema Ax = b es compatible (en estecaso indeterminado) si y sólo si b2 = −2b3; expresión coincidente con la anterior obtenida por elmétodo de Gauss.
c) Calculamos la inversa de A por el método de Gauss-Jordan. Aprovechamos las tranformacioneshechas en el apartado (a) sustituyendo a = 2. 1 2 −1 1 0 0
2 0 0 0 1 0−1 0 2 0 0 1
P12−→ 2 0 0 0 1 0
1 2 −1 1 0 0−1 0 2 0 0 1
F1( 12)−→ 1 0 0 0 1
2 01 2 −1 1 0 0−1 0 2 0 0 1
F21(−1)−→F31(1) 1 0 0 0 1
2 00 2 −1 1 −12 00 0 2 0 1
2 1
F2( 12)−→F3( 12)
1 0 0 0 12 0
0 1 −12 12 −14 0
0 0 1 0 14
12
F23(12)−→ 1 0 0 0 1
2 00 1 0 1
2 −18 14
0 0 1 0 14
12
Por tanto A−1 =
0 12 0
12 −18 1
40 1
412
=1
8
0 4 04 −1 20 2 4
. Observamos que la inversa sigue siendosimétrica. Ahora comprobamos que el resultado es correcto:
1
8
0 4 04 −1 20 2 4
1 2 −12 0 0−1 0 2
=
1 0 00 1 00 0 1
d) Puede hacerse de dos formas.
1a forma: Resolviendo el sistema por el método de Gauss. 1 2 −1 −42 0 0 −a−1 0 a 0
F21(−2)−→F31(1)
1 2 −1 −40 −4 2 −a+ 80 2 a− 1 −4
F2(− 14)−→ 1 2 −1 −40 1 −12 a−8
40 2 a− 1 −4
F32(−2)−→
1 2 −1 −40 1 −12 a−8
40 0 a −a
2
. De aquí concluimos lo siguiente:

Primer Parcial. Curso 2002-03 4
— Si a 6= 0, el sistema tiene solución única.— Si a = 0 el sistema es compatible indeterminado. Tenemos que resolverlo en este caso.
El sistema que obtenemos es equivalente a½x1 + 2x2 − x3 = −4
x2 − 12x3 = −2
cuyas soluciones sonx1 = 0
x2 = t− 2x3 = 2t
con t ∈ R.
2a forma: Se podía haber razonado utilizando los resultados obtenidos previamente:
— Si a 6= 0 la matriz es regular y el sistema tiene solución única.
— Si a = 0 el sistema tiene solución cuando las componentes del vector
−4−a0
cumplan
las condiciones obtenidas en el apartado (b). Así, el sistema es compatible si y sólo si2 · 0− a = 0, es decir, cuando a = 0. En este caso como la matriz no es regular tenemos unsistema compatible indeterminado y la resolución se lleva a cabo como en la primera forma.
e) Para a = 0 la matriz resultante es
1 2 −12 0 0−1 0 0
. Sabemos que el espacio columna R(A) es elgenerado por las columnas de la matriz, R(A) = lin {(1, 2,−1) , (2, 0, 0) , (−1, 0, 0)} . Por simpleinspección se tiene que los vectores (2, 0, 0) y (−1, 0, 0) son linealmente dependientes (ya que sonproporcionales), luego, R(A) = lin {(1, 2,−1) , (2, 0, 0)} y una base de este subespacio vectoriales la formada por los vectores {(1, 2,−1) , (2, 0, 0)} .Para calcular el espacio nulo N(A) debemos resolver el sistema Ax = 0. Utilizando los cálculos
hechos en el apartado anterior tenemos que la solución de este sistema es
x1 = 0x2 = tx3 = 2t
, luego
N(A) = lin {(0, 1, 2)} y una base de este subespacio está formada por {(0, 1, 2)} .Los subespacios N(A) y R(A) son ortogonales si y sólo si todos los vectores de la base de uno sonortogonales a todos los vectores de la base del otro. En este caso, como (1, 2,−1) · (0, 1, 2) = 0y (2, 0, 0) · (0, 1, 2) = 0, se verifica que N(A) y R(A) son ortogonales.Nótese que puede probarse que N(A) y R(A) son ortogonales sin determinar explícitamenteestos subespacios. En efecto, utilizando el Teorema Fundamentel del Álgebra Lineal, sabemosque R(At) = N(A)⊥, pero A es simetrica, por lo que R(A) = N(A)⊥.
PROBLEMA 2.-
a) Sabiendo que la función¡x2 + y2
¢2 − x3 − y3 − 2 = 0 define a y = f(x) como función implícitade x se pide:
a.1) (2.5 puntos) Calcular la recta tangente a la gráfica de f(x) en el punto (1, 1) .
a.2) (1.5 puntos) Obtener el polinomio de Taylor de orden dos en el punto c = 1. Usar dichopolinomio para obtener aproximadamente el valor de f(1.001).
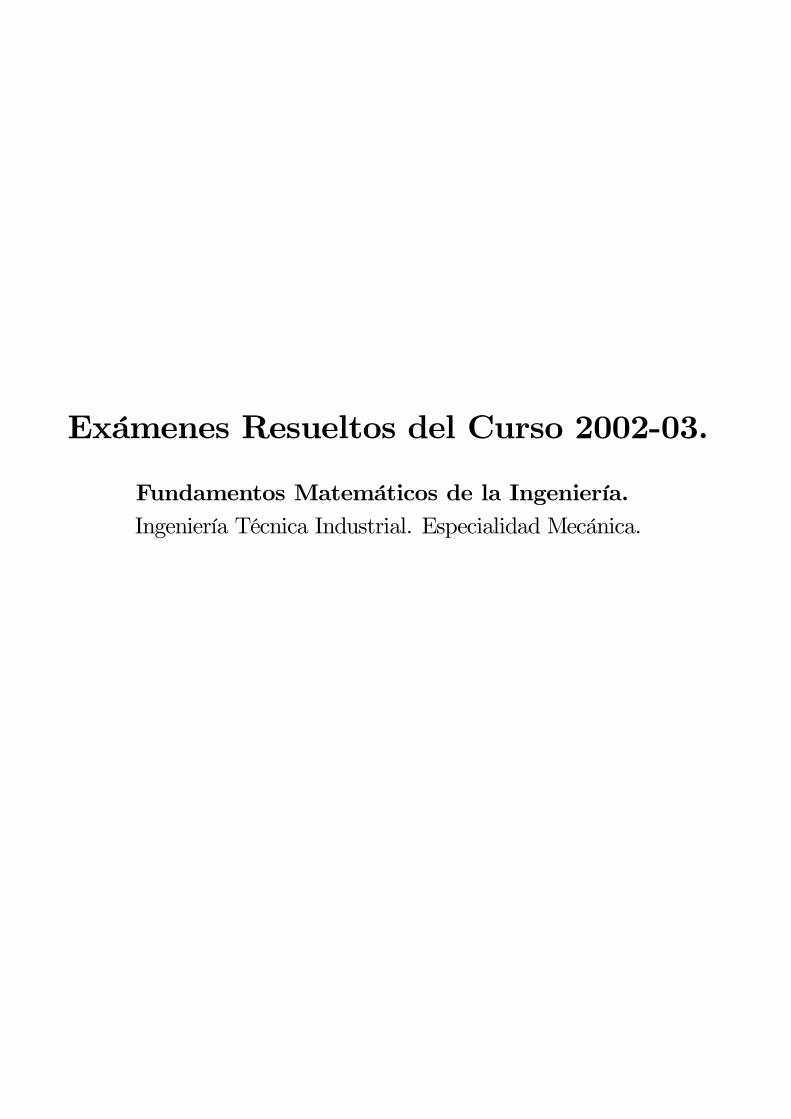
b) (3 puntos) Encontrar los máximos y mínimos absolutos de la función f(x) = x√4− x2 en el
intervalo [−2, 1]. Con esa información realiza un esbozo de la gráfica en el intervalo [−2, 1].

Primer Parcial. Curso 2002-03 5
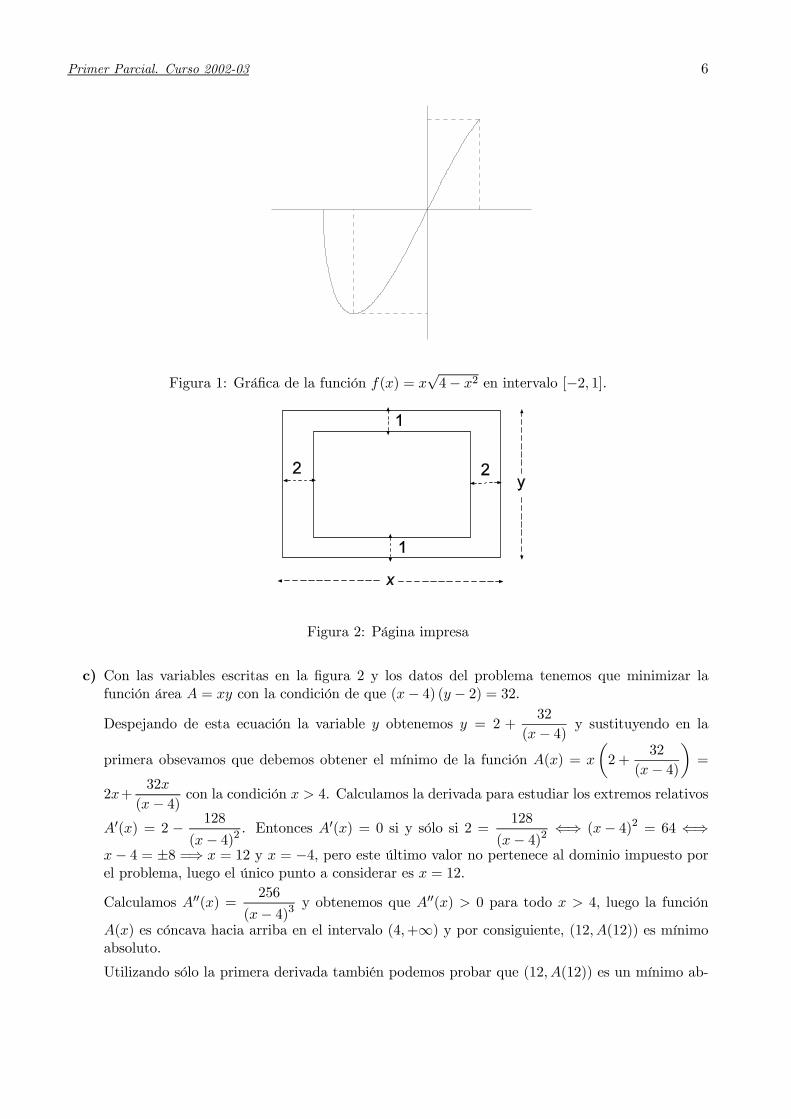
c) (3 puntos) Una página impresa va a tener márgenes de 2 centímetros en los lados y de 1centímetro en las partes superior e inferior. El área de la parte impresa es de 32 cm2. Determinarlas dimensiones de la página de manera que se utilice la menor cantidad posible de papel.
Solución
a) a1) Derivamos implícitamente la ecuación¡x2 + y2
¢2 − x3 − y3 − 2 = 0 y obtenemos2¡x2 + y2
¢µ2x+ 2y
dy
dx
¶− 3x2 − 3y2 dy
dx= 0. (∗)
Sustituyendo en esta ecuación x = 1 e y = 1 obtenemos
2(2)
µ2 + 2
dy
dx(1)
¶− 3− 3dy
dx(1) = 0 =⇒ 8 + 8
dy
dx(1)− 3− 3dy
dx(1) = 0 =⇒
5dy
dx(1) = −5 =⇒ dy
dx(1) = −1.
La ecuación de la recta tangente a una gráfica de ecuación y = f(x) en el punto (a, f(a)) seobtiene mediante la fórmula y− f(a) = f 0(a)(x−a). En nuestro caso y− 1 = −(x− 1), es decir,la ecuación de la recta tangente es y = −x+ 2.
a.2) Derivamos implícitamente la ecuación (∗) y obtenemos
2
µ2x+ 2y
dy
dx
¶2+ 2
¡x2 + y2
¢Ã2 + 2
µdy
dx
¶2+ 2y
d2y
dx2
!− 6x− 6y
µdy
dx
¶2− 3y2 d
2y
dx2= 0. (∗∗)
Sustituyendo en la ecuación (∗∗) x = 1, y = 1 y dydx(1) = −1 obtenemos
2(0)2 + 2(2)
µ2 + 2 + 2
d2y
dx2(1)
¶− 6− 6− 3d
2y
dx2(1) = 0 =⇒
4
µ4 + 2
d2y
dx2(1)
¶− 12− 3d
2y
dx2(1) = 0 =⇒ 4 + 5
d2y
dx2(1) = 0 =⇒ d2y
dx2(1) =
−45
El polinomio de Taylor de orden dos de una función y = f(x) en el punto (a, f(a)) se obtiene
mediante la fórmula P2(x) = f(a) +f 0(a)1!
(x− a) + f00(a)2!
(x− a)2. En nuestro caso obtenemos
P2(x) = f(1) +f 0(1)1(x− 1) + f
00(1)2
(x− 1)2 = 1− (x− 1)− 25(x− 1)2.
Calculamos aproximadamente f(1.001) utilizando para ello la aproximación que nos da el poli-
nomio de Taylor f(1.001) ' P2(1.001) = 1− (1.001− 1)− 25(1.001− 1)2 = 0.9989996.
b) En primer lugar calculamos los puntos críticos de f en el intervalo (−2, 1). Puesto que f 0 (x) =√4− x2− x2√
4− x2 , obtenemos que f es derivable en todos los puntos del intervalo (−2, 1) y porconsiguiente, los puntos críticos de f son aquellos para los que se anula la derivada. Entonces,
f 0 (x) = 0 si y sólo si√4− x2 = x2√
4− x2 ⇔ 4 − x2 = x2 ⇔ x = ±√2. Observamos que√2 /∈ (−2, 1) , luego el único punto crítico de f a considerar es −√2 . Calculamos f(−2) = 0;
f(−√2) = −2 y f(1) = √3. Por lo tanto, el valor mínimo es f(−√2) = −2 que se alcanzaen −√2 y el valor máximo es f(1) = √3 que se alcanza en 1. Con la información anterior, unesbozo de la gráfica se muestra en la figura 1.
Primer Parcial. Curso 2002-03 6
Figura 1: Gráfica de la función f(x) = x√4− x2 en intervalo [−2, 1].
Figura 2: Página impresa
c) Con las variables escritas en la figura 2 y los datos del problema tenemos que minimizar lafunción área A = xy con la condición de que (x− 4) (y − 2) = 32.Despejando de esta ecuación la variable y obtenemos y = 2 +
32
(x− 4) y sustituyendo en la
primera obsevamos que debemos obtener el mínimo de la función A(x) = x
µ2 +
32
(x− 4)¶=
2x+32x
(x− 4) con la condición x > 4. Calculamos la derivada para estudiar los extremos relativos
A0(x) = 2 − 128
(x− 4)2 . Entonces A0(x) = 0 si y sólo si 2 =
128
(x− 4)2 ⇐⇒ (x− 4)2 = 64 ⇐⇒x− 4 = ±8 =⇒ x = 12 y x = −4, pero este último valor no pertenece al dominio impuesto porel problema, luego el único punto a considerar es x = 12.
Calculamos A00(x) =256
(x− 4)3 y obtenemos que A00(x) > 0 para todo x > 4, luego la función
A(x) es cóncava hacia arriba en el intervalo (4,+∞) y por consiguiente, (12, A(12)) es mínimoabsoluto.
Utilizando sólo la primera derivada también podemos probar que (12, A(12)) es un mínimo ab-

Primer Parcial. Curso 2002-03 7
soluto. Efectivamente, puesto que A0(x) = 2− 128
(x− 4)2 =2 (x− 4)2 − 128
(x− 4)2 =2 (x+ 4) (x− 12)
(x− 4)2 ,
es fácil ver que A0(x) < 0 para 4 < x < 12 y A0(x) > 0 para x > 12. En consecuencia, lafunción A es estrictamente decreciente en el intervalo (4, 12) y estrictamente creciente en el in-tervalo (12,+∞). Así, el punto (12, A(12)) es mínimo absoluto. Por último, las dimensiones dela página son x = 12 cm e y = 2 +
32
(12− 4) = 6 cm.
PROBLEMA 3.-
a) (3.5 puntos) Averiguar si la matriz A =
4 0 0−1 2 −40 −1 2
es diagonalizable. En caso afirma-
tivo encontrar una matriz de paso P y una matriz diagonal D tal que A = PDP−1.
b) (3.5 puntos) De una matriz simétrica de orden tres B sabemos que sus autovalores son λ1 = 1con subespacio propio asociado V (1) = lin {(1, 0,−1)} y λ2 = 0 cuyo subespacio propio asociadoV (0) tiene de ecuación x− z = 0. Calcular la matriz B.
c) (3 puntos) Dibujar la gráfica de las funciones y = cosx e y = 5x + 5. Determinar en cuántospuntos se cortan estas dos gráficas y obtenerlos todos con una precisión de cuatro cifras decimalesexactas. Si tienes que hacer iteraciones tomar siempre como valor inicial x0 = 0.
Solución
a) Calculamos el polinomio característico de la matriz A.
det(λI −A) = |λI −A| =¯̄̄̄¯̄ λ− 4 0 0
1 λ− 2 40 1 λ− 2
¯̄̄̄¯̄ = (λ− 4) ¯̄̄̄ λ− 2 4
1 λ− 2¯̄̄̄=
(λ− 4)³(λ− 2)2 − 4
´= (λ− 4) ¡λ2 − 4λ¢ = (λ− 4)2 λ. Luego los autovalores son λ1 = 4 de
m.a. (λ1 = 4) = 2 y λ2 = 0 de m.a. (λ2 = 0) = 1.
Ahora calculamos los subespacios propios asociados a estos autovalores. Para calcular el sube-spacio propio asociado al autovalor λ1 = 4 debemos resolver el sitema (4I −A)x = 0. Utilizamospara ello el método de Gauss. Hacemos transformaciones elementales:
λI − A =
0 0 0 01 2 4 00 1 2 0
−→ 1 2 4 00 1 2 00 0 0 0
=⇒
x1 = 0x2 = −2tx3 = t
. Vemos por tanto que el
subespacio propio asociado al autovalor λ1 = 4 es V (4) = lin {(0,−2, 1)}. Como la dimensiónde este subespacio es uno se tiene que m.g. (λ1 = 4) = 1 6= m.a. (λ1 = 4) y la matriz no esdiagonalizable.
También puede observarse directamente que rg(λI − A) = 2, por lo que µ1 = dim(V (λ1)) =3− rg(λI −A) = 3− 2 = 1 6= 2 = m1 y por tanto, A es no diagonalizable.
b) Como la matriz es simétrica sabemos que los subespacios asociados a λ1 = 0 y a λ2 = 1 son or-togonales. Efectivamente, el vector (1, 0,−1) es ortogonal a cualquier vector (x, y, z) tal que x−z = 0. Tomamos una base ortonormal de V (1) que está formada por
µ1√2, 0,− 1√
2
¶y una base
ortonormal de V (0). Como V (0) = lin {(1, 0, 1) , (0, 1, 0)} , una base ortonormal de este subespa-cio está formada por
½µ1√2, 0,
1√2
¶, (0, 1, 0)
¾. Los vectores
µ1√2, 0,− 1√
2
¶,
µ1√2, 0,
1√2
¶, (0, 1, 0)

Primer Parcial. Curso 2002-03 8
constituyen una base ortonormal de autovectores. Por lo tanto una matriz de paso ortogonal
para la matriz B es la formada por Q =
1√2
01√2
0 1 0
− 1√2
01√2
y la matriz B es B = QDQT =
1√2
01√2
0 1 0
− 1√2
01√2
1 0 00 0 00 0 0
1√2
0 − 1√2
0 1 01√2
01√2
=
1
20 −1
20 0 0
−12
01
2
.De hecho, para resolver el problema no es necesario encontrar una matriz de paso ortogonal. Apartir de los datos del problema, V (1) = lin {(1, 0,−1)} y V (0) = lin {(1, 0, 1) , (0, 1, 0)} , la ma-
triz de paso P =
1 0 10 1 0−1 0 1
verifica P−1BP = D =
1 0 00 0 00 0 0
, y calculando la inversade P, P−1 =
1
20 −1
20 1 01
20
1
2
, resulta queB = PDP−1 = 1 0 1
0 1 0−1 0 1
1 0 00 0 00 0 0
1
20 −1
20 1 01
20
1
2
=
1
20 −1
20 0 0
−12
01
2
.c) Las gráficas de las dos funciones en el mismo sistema están dadas en la Figura 3.
y=cos(x)
y=5x+5
Figura 3: Gráficas de y = cos(x) e y = 5x+ 5.
Encontrar los puntos en los que se cortan las gráficas de estas dos funciones es equivalente a
resolver el sistema de ecuaciones½
y = cosxy = 5x+ 5
⇔ cosx = 5x + 5 ⇔ 5x + 5 − cosx = 0. Pararesolver esta ecuación llamamos f(x) = 5x+ 5− cosx y buscamos los ceros de esta función. Yasea observando las gráficas de las dos funciones o estudiando analíticamente la función f(x) y
teniendo en cuenta f³−π2
´= −5π
2+ 5 < 0 , f(0) = 4 > 0 y que f 0(x) = 5 + senx ≥ 4 > 0
(es decir, f es estrictamente creciente), se concluye que estas dos gráficas se cortan sólo en un

Primer Parcial. Curso 2002-03 9
punto. En la Figura 4 puede verse un esbozo de la gráfica de f. (no es una recta)
y=5x+5-cos(x)
Figura 4: Gráfica de f(x) = 5x+ 5− cos(x).
Para obtener el punto de corte utilizamos el método de Newton.
n xn f(xn) f 0(xn)f(xn)
f 0(xn)xn+1 = xn − f(xn)
f 0(xn)1 0 4 5 0.8 −0.82 −0.8 0.3032932 4.2826439 0.0708191 −0.87081913 −0.8708191 0.001704269 4.2351431 0.00040239 −0.87122144 −0.8712214 0.0000005574 4.234884 0.000000118 −0.8712215
Como |−0.000000118| < 0.0001 (o sean repetido al menos cuatro cifras decimales en la últimaiteración) tenemos que la única solución de f(x) = 0 es x∗ = −0.8712215 y el punto en el que secortan las gráficas es (−0.8712215, 0.6438925).
PROBLEMA 4.-
Dadas las matrices A =
1 1−1 12 1
, se pide:a) (2 puntos) Determinar una base ortogonal del espacio columna R(A) de la matriz A.
b) (2 puntos) Resolver por el método de los mínimos cuadrados el sistema Ax =
204
.c) (2 puntos) Encontrar la recta que mejor se ajusta en el sentido de los mínimos cuadrados a la
nube de puntos (1, 2) , (−1, 0) , (2, 4) .
d) (2 puntos) Calcular la proyección ortogonal de
204
sobre el espacio columna de A.

Primer Parcial. Curso 2002-03 10
e) (2 puntos) Encontrar la proyección proyR(A) x donde x es un vector arbitrario y expresar dicha
proyección en la forma Px, determinando previamente la matriz P. Calcular P
1−12
, P 111
y encontrar un vector x tal que Px = 0.
Solución
a) Sean u1 = (1,−1, 2) y u2 = (1, 1, 1) los vectores columnas de la matriz A. Por tanto R(A) =lin {u1, u2} y tenemos que {u1, u2} constituyen una base de R(A).Utilizamos el método de Gram-Schmidt para obtener la base ortogonal.
Primer paso: v1 = u1 = (1,−1, 2)Segundo paso: v2 = u2 − u2.v1
v1.v1v1 = (1, 1, 1)− 2
6 (1,−1, 2) =¡23 ,43 ,13
¢Comprobamos que los vectores v1 y v2 son ortogonales: v1.v2 = 2
3 − 43 +
23 = 0.
Podemos tomar como vector v2 un múltiplo del que nos ha salido. Por ejemplo, v2 = (2, 4, 1).
b) Para resolver el sistema Ax = b por el método de los mínimos cuadrados, resolvemos el sistema
normal asociado ATAx = AT b =⇒µ1 −1 21 1 1
¶ 1 1−1 12 1
µ xy
¶=
µ1 −1 21 1 1
¶ 204
=⇒
µ6 22 3
¶µxy
¶=
µ106
¶. Este último sistema lo resolvemos por el método de Gaussµ
6 2 102 3 6
¶P12−→
µ2 3 66 2 10
¶F1( 12)−→
µ1 3
2 36 2 10
¶F21(−6)−→
µ1 3
2 30 −7 −8
¶, luego la solu-
ción por mínimos cuadrados o pseudosolución del sistema es:
x =
9
7
y =8
7
c) En principio buscamos una recta de ecuación y = mx+n que pase por los puntos (1, 2) , (−1, 0) , (2, 4).Si hay una que pase por estos tres puntos esa es la que mejor se ajusta. Deberíamos resolver,
por tanto, el sistema
1 1−1 12 1
µ mn
¶=
204
, que no tiene solución. Cuando esto ocurrebuscamos aquella recta para la que se verifica que
°°°°°° 1 1−1 12 1
µ mn
¶− 204
°°°°°° es mínimo.Y esto es resolver el sistema
1 1−1 12 1
µ mn
¶=
204
por el método de los mínimos cuadra-dos. Como lo hemos resuelto en el apartado (b) tenemos que la recta buscada es y =
9
7x+
8
7.
d) La proyección ortogonal de b sobre el espacio columna R(A) podemos obtenerla por dos métodos.
Primer método: Como tenemos una base ortogonal de R(A) podemos usar la fórmula:
proyR(A) (b) =(b.v1)
(v1.v1)v1 +
(b.v2)
(v2.v2)v2 =
10
6(1,−1, 2) + 8
21(2, 4, 1) =
=
µ5
3,−53,10
3
¶+
µ16
21,32
21,8
21
¶=
µ17
7,−17,26
7
¶.

Primer Parcial. Curso 2002-03 11
Segundo método: Como hemos calculado previamente la pseudosolución α =¡97 ,87
¢t, la proyec-ción se puede calcular como: proyR(A) (b) = Aα =
1 1−1 12 1
9
78
7
=
17
7−1726
7
.
e) Este apartado puede hacerse, como el anterior, de dos formas. Sea x =
x1x2x3
vamos a calcular
proyR(A) (x) .
Primer método: Como tenemos una base ortogonal de R(A) podemos usar la fórmula:
proyR(A) (x) =(x.v1)
(v1.v1)v1 +
(x.v2)
(v2.v2)v =
x1 − x2 + 2x36
(1,−1, 2)t + 2x1+4x2 + x321
(2, 4, 1)t=
=
µx1 − x2 + 2x3
6+4x1+8x2 + 2x3
21,−x1 + x2 − 2x3
6+8x1+16x2 + 4x3
21,2x1 − 2x2 + 4x3
6+2x1+4x2 + x3
21
¶t=
=
µ7x1 − 7x2 + 14x3 + 8x1+16x2 + 4x3
42,−7x1 + 7x2 − 14x3 + 16x1+32x2 + 8x3
42,14x1 − 14x2 + 28x3 + 4x1+8x2 + 2x3
42
¶t=
=
µ15x1 + 9x2 + 18x3
42,9x1 + 39x2 − 6x3
42,18x1 − 6x2 + 30x3
42
¶t=1
42
15 9 189 39 −618 −6 30
x1x2x3
Segundo método: Calculando previamente la pseudosolución z. Una vez obtenida haremos
proyR(A) (x) = Az =
1 1−1 12 1
z.Resovemos el sistema normal asociadoATAz = AT
x1x2x3
=⇒µ1 −1 21 1 1
¶ 1 1−1 12 1
µ uv
¶=
µ1 −1 21 1 1
¶ x1x2x3
=⇒
µ6 22 3
¶µuv
¶=
µx1 − x2 + 2x3x1 + x2 + x3
¶=⇒
µuv
¶=
µ6 22 3
¶−1µx1 − x2 + 2x3x1 + x2 + x3
¶=⇒
µuv
¶=1
14
µ3 −2−2 6
¶µx1 − x2 + 2x3x1 + x2 + x3
¶=1
14
µx1 − 5x2 + 4x34x1 + 8x2 + 2x3
¶
proyR(A) (x) =1
14
1 1−1 12 1
µ x1 − 5x2 + 4x34x1 + 8x2 + 2x3
¶=1
14
5x1 + 3x2 + 6x33x1 + 13x2 − 2x36x1 − 2x2 + 10x3
=
=1
42
15 9 189 39 −618 −6 30
x1x2x3
Como
1−12
, 111
∈ R(A) se tiene que P 1−12
=
1−12
y P
111
=
111
.

Primer Parcial. Curso 2002-03 12
Como Px calcula la proyección de x sobre el espacioR(A), buscar x tal que Px = 0 es equivalente
a buscar un vector x ∈ R(A)⊥ y para ello debemos resolver el sistema½x1 − x2 + 2x3 = 0x1 + x2 + x3 = 0
cuya solución es
x1 = −3tx2 = tx3 = 2t
. Y un vector buscado es x =
−312
.De hecho, si se hacen los productos se obtiene:
1
42
15 9 189 39 −618 −6 30
1−12
=
1−12
, 1
42
15 9 189 39 −618 −6 30
111
=
111
,1
42
15 9 189 39 −618 −6 30
−312
=
000
.

Segundo Parcial. Curso 2002-03
PROBLEMA 1.-Dada la función f (x, y) = ex
2−2x+y2 se pide:
a) (2 puntos) Encontrar y clasificar los puntos críticos de f (x, y) .
b) (2 puntos) Calcular los extremos absolutos de f (x, y) en la región del plano cerrada y acotadaR =
©(x, y) : x2 + y2 ≤ 4ª .
c) (2 puntos) Calcular la ecuación del plano tangente a la superficie de ecuación f (x, y) =ex
2−2x+y2 en los puntos A(0, 0, 1) y B(1, 0, e−1).
d) (2 puntos) Hallar la derivada direccional de f (x, y) en el punto P (1, 1) en la dirección delvector que une P con Q(0,−1). ¿Cuál es el valor máximo que alcanza la derivada direccional enel punto P (1, 1)?
e) (2 puntos) Utilizar la regla de la cadena para obtener∂f
∂sy∂f
∂tsiendo x = sen s e y = t2 ln s2.
Solución:
a) En primer lugar, buscamos los puntos críticos de f resolviendo el sistema
∂f
∂x(x, y) = 0,
∂f
∂y(x, y) = 0.
Puesto que∂f
∂x(x, y) = (2x− 2)ex2−2x+y2 y ∂f
∂y(x, y) = 2yex
2−2x+y2 , debemos resolver el sistema
((2x− 2)ex2−2x+y2 = 0,2yex
2−2x+y2 = 0,
Como ex2−2x+y2 6= 0 para todo (x, y) ∈ R2, el sistema anterior es equivalente a(
2x− 2 = 02y = 0
cuya única solución es x = 1, y = 0. Por lo tanto el único punto crítico de f es el punto (1, 0).
Ahora clasificamos dicho punto crítico. Para ello, calculamos las derivadas parciales de segundoorden de f
∂2f
∂x2(x, y) = 2ex
2−2x+y2 + (2x− 2)2ex2−2x+y2 , ∂2f
∂y2(x, y) = 2ex
2−2x+y2 + (2y)2ex2−2x+y2 ,
∂2f
∂x∂y(x, y) = 2y(2x− 2)ex2−2x+y2 .
13

Segundo Parcial. Curso 2002-03 14
Sustituyendo en el punto crítico obtenemos∂2f
∂x2(1, 0) = 2e−1,
∂2f
∂y2(1, 0) = 2e−1 y
∂2f
∂x∂y(1, 0) =
0. Ya que ¯̄̄̄¯̄̄̄ ∂2f
∂x2(1, 0)
∂2f
∂x∂y(1, 0)
∂2f
∂x∂y(1, 0)
∂2f
∂y2(1, 0)
¯̄̄̄¯̄̄̄ = ¯̄̄̄ 2e−1 0
0 2e−1
¯̄̄̄= 4e−2 > 0
y∂2f
∂x2(1, 0) = 2e−1 > 0, obtenemos que el punto crítico (1, 0) es un mínimo relativo.
b) Comencemos calculando los puntos críticos de f en el interior de R =©(x, y) : x2 + y2 ≤ 4ª . A
partir del apartado anterior, tenemos (1, 0) es el único punto crítico de f y además perteneceal conjunto
©(x, y) : x2 + y2 < 4
ª, es decir, se encuentra en el interior de R.
Seguidamente restringimos la función f a la frontera de R, esto es a la circunferencia de ecuación
x2+y2 = 4. De esta forma, haciendo x2+y2 = 4 la función se expresa como f(x, y) = ex2−2x+y2
=e4−2x
. Luego debemos analizar la función g(x) = e4−2x
, donde x ∈ [−2, 2].La derivada de g satisface g0(x) = −2e4−2x < 0 para todo x ∈ (−2, 2), luego el máximo absolutode g se alcanza en el punto x = −2 y el mínimo absoluto en el punto x = 2. Obsérvese que de laexpresión x2+ y2 = 4 con x = ±2, se deduce y = 0 y por consiguiente los posibles valores dondef restringida a la circunferencia
©(x, y) : x2 + y2 = 4
ªalcanza su máximo absoluto y su mínimo
absoluto son (2, 0) y (−2, 0).Sólo nos queda evaluar f en los puntos (1, 0), (2, 0) y (−2, 0):f(1, 0) = e−1 =
1
e, f(2, 0) = e4−4 = e0 = 1 y f(−2, 0) = e4+4 = e8,
luego el mínimo absoluto de f en la región R se alcanza el punto (1, 0) y su valor es f(1, 0) = e−1
y el máximo absoluto se alcanza en en el punto (−2, 0) y su valor es f(−2, 0) = e8.
c) Puesto que el punto (1, 0) es un punto crítico de f (es decir,∂f
∂x(1, 0) =
∂f
∂y(1, 0) = 0) resulta que
el plano tangente a la superficie de ecuación z = f(x, y) en el punto B(1, 0, e−1) es horizontal ysu ecuación viene dada por z = e−1.El plano tangente a la superficie de ecuación z = f(x, y) en el punto A(0, 0, 1) tiene por ecuación
∂f
∂x(0, 0)(x− 0) + ∂f
∂y(0, 0)(y − 0)− (z − 1) = 0.
Utilizando las derivadas parciales obtenidas en el primer apartado obtenemos∂f
∂x(0, 0) = −2 y
∂f
∂y(0, 0) = 0 y por consiguiente, el plano tangente tiene de ecuación (−2)(x − 0) + 0(y − 0) −
(z − 1) = 0, esto es,−2x− z + 1 = 0.
d) El vector que une el punto P (1, 1) con el punto Q(0,−1) es −→PQ = (0,−1) − (1, 1) = (−1,−2).Normalizamos este vector y obtenemos el vector unitario ~u =
−→PQ
k−→PQk =
µ−1√5,−2√5
¶. Para
calcular la derivada direccional pedida necesitamos el gradiente de f en el punto (1, 1). Utilizandode nuevo las derivadas parciales obtenidas en el primer apartado obtenemos
∇f(1, 1) =µ∂f
∂x(1, 1),
∂f
∂y(1, 1)
¶= (0, 2)

Segundo Parcial. Curso 2002-03 15
y la derivada direccional solicitada es
D~uf(1, 1) = ∇f(1, 1) · ~u = (0, 2) ·µ−1√
5,−2√5
¶= − 4√
5.
El valor máximo de la derivada direccional de f en el punto (1, 1) es k∇f(1, 1)k = k(0, 2)k = 2.e) En primer lugar expresamos y en la forma y = t2 ln s2 = 2t2 ln s.
Aplicando la regla de la cadena tenemos que
∂f
∂s=
∂f
∂x· ∂x∂s+
∂f
∂y· ∂y∂s= (2x− 2)ex2−2x+y2 · cos(s) + 2yex2−2x+y2 · 2t
2
s
¯̄̄̄x=sen s,y=2t2 ln s
=
= esen2 s−2 sen s+4t4 ln2 s
µ(2 sen s− 2) cos(s) + 8t
4
sln s
¶.
Análogamente,∂f
∂t=
∂f
∂x· ∂x∂t+
∂f
∂y· ∂y∂t= (2x− 2)ex2−2x+y2 · 0 + 2yex2−2x+y2 · 4t ln s
¯̄̄x=sen s,y=2t2 ln s
=
= 16t3 ln2 sesen2 s−2 sen s+4t4 ln2 s.
PROBLEMA 2.-
a) (3 puntos) Calcular las integralesZxe−xdx
Zx2√4− x2dx.
b) (2 puntos) Determinar si alguna de las integrales impropias siguientes son convergentes y cal-
cular su valor cuando lo seanZ ∞
1xe−xdx
Z 2
0
x2√4− x2dx.
c) (5 puntos) Calcular el volumen generado por la región del primer cuadrante limitada por lasgráficas de y = senx, y = 1 y x = 0, cuando dicha región gira:
c.1) En torno del eje OX.
c.2) En torno del eje OY.
c.3) En torno de la recta x =π
2.
Solución:
a) Calculamos la intergalZxe−xdx aplicando el método de integración por partes.Z
xe−xdx =·u = x du = dxdv = e−xdx v = −e−x
¸= −xe−x−
Z−e−xdx = −xe−x−e−x+C = −e−x(x+
1) + C.

Segundo Parcial. Curso 2002-03 16
Para calcular la integralZ
x2√4− x2dx realizamos el cambio de variable
½x = 2 sen tdx = 2cos tdt
y
tenemos en cuenta que sen2 t =1− cos 2t
2de donde obtenemosZ
x2√4− x2dx =
Z4 sen2 t√4− 4 sen2 t2 cos tdt =
Z8 sen2 t
2√1− sen2 t cos tdt
=
Z4 sen2 t
cos tcos tdt = 4
Z2sen tdt = 4
Z1− cos 2t
2dt
=
Z2dt−
Z2 cos 2tdt = 2t− sen 2t+ C = 2t− 2 sen t · cos+C
= 2arcsen³x2
´− 2 sen t · cos t+ C = 2arcsen
³x2
´− 2x
r1−
³x2
´2+C
= 2arcsen³x2
´− x
p4− x2 +C.
b) Utilizando el primer apartado
Z ∞
1xe−xdx = lim
b→+∞
Z b
1xe−xdx = lim
b→+∞£−e−x(x+ 1)¤b
1
= limb→+∞
−e−b(b+ 1) + 2e−1 = 2e−1
ya que limb→+∞
−e−b(b+ 1) = 0 ·∞ proporciona una indeterminación que resolvemos aplicando la
regla de L’Hôpital, limb→+∞
−b+ 1eb
= limb→+∞
− 1eb= 0.
En resumen, la integral impropiaZ ∞
1xe−xdx es convergente y su valor es
Z ∞
1xe−xdx = 2e−1.
La función f(x) =x2√4− x2 es continua en el intervalo [0, 2) y lim
x→2−f(x) = lim
x→2−x2√4− x2 = +∞,
por tanto, aplicando el apartado anterior, obtenemos
Z 2
0
x2√4− x2dx = lim
a→2−
Z a
0
x2√4− x2dx = lim
a→2−
h2 arcsen
³x2
´− x
p4− x2
ia0
= lima→2−
³2 arcsen
³a2
´− a
p4− a2
´= 2arcsen 1 = 2
π
2= π.
Es decir, la segunda integral impropia es también convergente y su valor esZ 2
0
x2√4− x2dx = π.
c) Calculamos el primer volumen aplicando el método de discos y los dos últimos aplicando elmétodo de capas.
c.1) Obtenemos el volumen pedido V en este apartado como la diferencia de dos volúmenesV = V1 − V2, siendo V1 el volumen del cilidro que se genera haciendo girar la secciónacotada por las rectas y = 1, y = 0, x =
π
2alrededor del eje OX y V2 el volumen del solido
de revolución que se genera haciendo girar la sección acotada por y = senx, y = 0, x =π
2en torno al eje OX. Es decir,
V1 =π
2· π · 12 = π2
2

Segundo Parcial. Curso 2002-03 17
V2 = π
Z π/2
0sen2 xdx = π
Z π/2
0
1− cos 2x2
dx = π
ÃZ π/2
0
1
2dx−
Z π/2
0
cos 2x
2dx
!
= π
Ã1
2· π2−·sen 2x
4
¸π/20
!=
π
4(π − senπ + sen 0) = π2
4.
Luego, el volumen es V = V1 − V2 = π2
2− π2
4=
π2
4.
c.2) El volumen solicitado se obtiene directamante por el método de las capas
V = 2π
Z π/2
0x(1− senx)dx.
Ahora, aplicando el método de integración por partes obtenemos
V = 2π
Z π/2
0x(1− senx)dx =
·u = x du = dxdv = (1− senx)dx v = x+ cosx
¸= 2π
Ãx (x+ cosx)|π/20 −
Z π/2
0(x+ cosx) dx
!= 2π
Ãπ
2
³π2+ cos
π
2
´−·x2
2+ senx
¸π/20
!
= 2π
µπ2
4− π2
8− 1¶= 2π
µπ2
8− 1¶=
π3
4− 2π.
c.3) Aplicando de nuevo el método de capas tenemos que el volumen pedido viene dado por
V = 2π
Z π/2
0
³π2− x
´(1− senx)dx = 2π
Z π/2
0
π
2(1− senx)dx− 2π
Z π/2
0x(1− senx)dx.
Notemos que la segunda integral ha sido calculada en el apartado c.2) y su valor es
2π
Z π/2
0x(1− senx)dx = π3
4− 2π, así sólo debemos calcular la primera de las integrales
2π
π/2Z0
π
2(1− senx)dx = 2π
π/2Z0
π
2dx+ π2
π/2Z0
(− senx) dx
= 2π · π2· π2+ π2 [cosx]
π/20 =
π3
2− π2
y por consiguiente, el volumen pedido es V =π3
2− π2 −
µπ3
4− 2π
¶=
π3
4− π2 + 2π.
PROBLEMA 3.-
a) (4 puntos) Calcular el volumen del sólido limitado por las superifies de ecuaciones z = 6−x2−y2y z =
px2 + y2, utilizando integración múltiple.
b) (3 puntos) Calcular la integral dobleZZ
Rey
3dA, siendo R la región del plano limitada por las
curvas de ecuaciones y =√x; y = 1;x = 0.

Segundo Parcial. Curso 2002-03 18
c) (3 puntos) Sabiendo que ln z + x2 − y + z − 1 = 0, define a z como función implícita de x e yobtener
∂z
∂x,
∂z
∂yy
∂2z
∂x∂y.
Solución:
a) Como un primer paso para la obtención del volumen limitado por el paraboloide z = 6−x2− y2y el cono z =
px2 + y2, calculamos la curva intersección de ambas superficies. Esto nos lleva a
la resolución del sistema de ecuaciones(z = 6− x2 − y2z =
px2 + y2
⇒(z = 6− ¡x2 + y2¢z2 = x2 + y2
⇒ z = 6− z2.
Las soluciones de esta ecuación son z = −3, z = 2 y descartamos la solución negativa puesz =
px2 + y2 ≥ 0. Por tanto, el paraboloide y el plano intersecan en la circunferencia x2+ y2 =
4, z = 2, cuya proyección sobre el plano z = 0, es la circunferencia de ecuación x2 + y2 = 4.
De esta forma, el volumen limitado por el cono y el paraboloide puede expresarse mediante unaintegral doble en la forma
V =
ZZR
³6− x2 − y2 −
px2 + y2
´dA,
donde R es el círculo R =©(x, y) : x2 + y2 ≤ 4ª .
Ahora resolvemos la integral doble aplicando un cambio a coordenadas polares. Puesto que laregiónR puede escribirse en coordenadas polares en la formaR = {(θ, r) : 0 ≤ θ ≤ 2π, 0 ≤ r ≤ 2} ,el volumen es
V =
ZZR
³6− x2 − y2 −
px2 + y2
´dA =
Z 2π
0
Z 2
0
¡6− r2 − r¢ rdrdθ
=
Z 2π
0
·3r2 − r
4
4− r
3
3
¸r=2r=0
dθ =
Z 2π
0
16
3dθ =
32
3π.
Utilizando integrales triples y coordenadas cilíndricas el volumen sería
V =
ZZZQdV =
Z 2π
0
Z 2
0
Z 6−r2
rrdzdrdθ =
Z 2π
0
Z 2
0
¡6− r2 − r¢ rdrdθ = 32
3π.
b) CalculamosZZ
Rey
3dA describiendo la región R como una región horizontalmente simple. La
región R puede expresarse como R =©(x, y) ∈ R2 : 0 ≤ y ≤ 1, 0 ≤ x ≤ y2ª . Por consiguiente,
ZZR
ey3dA =
Z 1
0
Z y2
0ey
3dxdy =
Z 1
0y2ey
3dy =
"ey
3
3
#10
=e− 13.
c) Si la ecuación ln z + x2 − y + z − 1 = 0, define a z como función implícita de x e y, derivandorespecto de x se obtiene
1
z· ∂z∂x+ 2x+
∂z
∂x= 0

Segundo Parcial. Curso 2002-03 19
de donde∂z
∂x= − 2xz
1 + z.
Derivando la ecuación inicial respecto de y conseguimos
1
z· ∂z∂y− 1 + ∂z
∂y= 0 (*)
y por tanto,∂z
∂y=
z
1 + z.
Si ahora derivamos la igualdad (*) respecto de x deducimos que
− 1z2· ∂z∂x· ∂z∂y+1
z· ∂2z
∂x∂y+
∂2z
∂x∂y= 0
y teniendo en cuenta la anteriores valores obtenidos de la derivadas parciales∂z
∂xy∂z
∂yse consigue
la igualdad
2x
(1 + z)2+1
z· ∂2z
∂x∂y+
∂2z
∂x∂y= 0
y por consiguiente,∂2z
∂x∂y= − 2xz
(1 + z)3.
PROBLEMA 4.-
Consideremos el campo vectorial→F (x, y) = 6xy
→i +
¡ax2 + y2
¢ →j , donde a es una constante real.
Y sea C el camino que va desde A hasta D pasando por B. (Véase la Figura 1).
B(2,0)
A(3,1) D(0,1)
Figura 5: Representación de la curva C.
Se pide:
a) (3 puntos) ¿Existe algún número a tal que el campo→F (x, y) sea conservativo? En caso
afirmativo, encontrar una función potencial de→F (x, y) .
b) (2 puntos) Calcular la integral de líneaZC6xydx+
¡3x2 + y2
¢dy.
c) (3 puntos) Calcular la integral de líneaZC(x− y) ds.

Segundo Parcial. Curso 2002-03 20
d) (2 puntos) Para a = 8, descomponer el campo vectorial→F (x, y) en la forma
→F (x, y) =
→F1 (x, y)+
→F2 (x, y) ,
siendo→F1 (x, y) conservativo. Utilizar esta información para calcular la integral
ZC6xydx +¡
8x2 + y2¢dy.
Solución:
a) Tomando M(x, y) = 6xy y N(x, y) =¡ax2 + y2
¢, el campo vectorial
→F es conservativo si
∂M
∂y(x, y) =
∂N
∂x(x, y). Imponiendo esta condición se encuentra la igualdad 6x = 2ax, luego
→F es conservativo si y sólo si a = 3.
Busquemos una función potencial f para ~F . La función potencial f(x, y) satisface∂f
∂x(x, y) =
M(x, y) = 6xy, de donde
f(x, y) =
Z6xydx = 3x2y + ϕ(y)
De la relación∂f
∂y(x, y) = N(x, y) = 3x2 + y2, obtenemos 3x2 + ϕ0(y) = 3x2 + y2 =⇒ ϕ0(y) =
y2 =⇒ ϕ(y) =y3
3+cte y una función potencial para ~F es f(x, y) = 3x2y +
y3
3.
b) Por el apartado anterior, el campo vectorial→F (x, y) = 6xy
→i +
¡3x2 + y2
¢ →j es conservativo y
f(x, y) = 3x2y+y3
3es una función potencial. Por tanto, aplicando el Teorema Fundamental de
Integrales de Línea, resulta queZC6xydx+
¡3x2 + y2
¢dy = f(D)− f(A) = f(0, 1)− f(3, 1) = 1
3− (27 + 1
3) = −27.
c) Llamamos C = C1 ∪ C2 al camino de la Figura 1. Una de las posibles parametrizaciones paradicho camino es la siguiente C1 ≡
½x = 3− ty = 1− t , t ∈ [0, 1] y C2 ≡
½x = 2− 2ty = t
, t ∈ [0, 1] .La integral de linea del campo escalar será:Z
C
(x− y) ds =
ZC1
(x− y) ds+ZC2
(x− y) ds
=
Z 1
0(3− t− 1 + t)√1 + 1dt+
Z 1
0(2− 2t− t)√1 + 4dt
= 2√2 +√5/2.
d) Es fácil ver que→F (x, y) = 6xy
→i +
¡8x2 + y2
¢ →j = 6xy
→i +
¡3x2 + y2
¢ →j +5x2
→j , por tanto,
→F (x, y) =
→F1 (x, y)+
→F2 (x, y) , siendo
→F1 (x, y) = 6xy
→i +
¡3x2 + y2
¢ →j conservativo (ver
primer apartado) y→F2 (x, y) = 5x2
→j . De esta manera, la integral pedida puede calcularse
mediante ZC
6xydx+¡8x2 + y2
¢dy =
ZC
6xydx+¡3x2 + y2
¢dy +
ZC
5x2dy.

Segundo Parcial. Curso 2002-03 21
Como la primera de las integrales fue obtenida en el segundo apartado, sólo vamos a calcular lasegunda de las integrales.
ZC
5x2dy =
ZC1
5x2dy +
ZC2
5x2dy
= 5
Z 1
0(3− t)2 (−1)dt+ 5
Z 1
0(2− 2t)2 (1)dt
=
"5(3− t)3
3− 5 (2− 2t)
3
6
#10
=40
3− 45 + 20
3= −25.
Por lo tantoZC6xydx+
¡8x2 + y2
¢dy = −27− 25 = −52.

Examen de Junio. Curso 2002-03
PROBLEMA 1.-
(A) Considérese el subespacio vectorial de R3 cuya ecuación implícita es x+ y − 2z = 0 y el vectorb = (1, 0, 1) . Se pide:
(i) [1 punto] Encontrar una base del subespacio W.
(ii) [1 punto] Encontrar una base del subespacio W⊥ ortogonal a W.
(iii) [1 punto] Calcular la proyección del vector b sobre el subespacio W.
(B) Dada la matriz A =
−1 0 02 2 00 a a− 2
, se pide:(i) [2 puntos] Determinar los valores de a para los que existe inversa de A y obtenerla cuando
sea posible.
(ii) [3 puntos] Para los valores de a para los que no tiene inversa, averiguar si la matriz A esdiagonalizable y en caso afirmativo encontrar una matriz diagonal D y una matriz de pasoP tal que A = PDP−1.
(C) [2 puntos] Calcular el desarrollo de Maclaurin de orden tres de la función f(x) = ln(1− 2x) yutilizarlo para obtener aproximadamente el valor de ln(0.998).
Solución
(A) (i) La dimensión del subespacio W es dim (W ) = 3 − k, donde k es el número de ecuacionesimplícitas linealmente independientes. En este caso k = 1. Por lo tanto, dim (W ) = 2 y deaquí que una base de W esté formada por dos vectores linealmente independientes. Comolos vectores (1,−1, 0) y (2, 0, 1) son independientes y pertenecen al subespacio W , tenemosque una base es BW = {(1,−1, 0) , (2, 0, 1)} .
(ii) Sabemos que dim (W ) + dim¡W⊥¢ = 3, por lo tanto dim
¡W⊥¢ = 1, luego una base
de W⊥ estará formada por un único vector linealmente independiente. Como W⊥ =©~u ∈ R3 : ~u · ~v = 0, ~v ∈Wª y (1, 1,−2) . (x, y, z) = 0 para todo (x, y, z) ∈ W , tenemosque ~u = (1, 1,−2) ∈ W⊥ y una base de este subespacio estará formada por este vector, esdecir, BW⊥ = {(1, 1,−2)} .
(iii) Para cualquier vector b se tiene~b = proyW³~b´+proyW⊥
³~b´. En este caso, la proyección so-
breW⊥ es muy sencilla de calcular, proyW⊥³~b´=~b · ~u~u · ~u~u =
−16(1, 1,−2) =
µ−16,−16,2
6
¶.
Por tanto, proyW³~b´= ~b− proyW⊥
³~b´= (1, 0, 1)−
µ−16,−16,2
6
¶=
µ7
6,1
6,2
3
¶.
22

Examen de Junio. Curso 2002-03 23
La proyección proyW³~b´podría obtenerse de otra forma. Aplicando el método de Gram—
Schmidt a la base BW = {(1,−1, 0) , (2, 0, 1)} de W se obtiene:
~v1 = (1,−1, 0) =⇒ ~w1 =~v1k~v1k =
³1√2,− 1√
2, 0´
~v2 = (2, 0, 1)− (1,−1, 0) = (1, 1, 1) =⇒ ~w2 =~v2k~v2k =
³1√3,− 1√
3, 1√
3
´,
es decir, una base ortonormal de W esn³
1√2,− 1√
2, 0´,³1√3,− 1√
3, 1√
3
´oy la proyección
pedida es
proyW
³~b´=³~w1 ·~b
´~w1+
³~w2 ·~b
´~w2 =
1√2
³1√2,− 1√
2, 0´+ 2√
3
³1√3,− 1√
3, 1√
3
´=
µ7
6,1
6,2
3
¶.
También podemos obtener proyW³~b´siguiendo los pasos:
• Construimos la matriz A = 1 2−1 00 1
cuyas columnas la forman una base del subes-
pacio W.• Resolvemos el sistema ¡At ·A¢α = Atb. En este caso, el sistema es
µ1 −1 02 0 1
¶· 1 2−1 00 1
µ α1α2
¶=
µ1 −1 02 0 1
¶ 101
,es decir, µ
2 22 5
¶µα1α2
¶=
µ13
¶y su única solución es α1 = −16 ,α2 = 2
3 ·
• Ahora, proyW³~b´= Aα =
1 2−1 00 1
µ −1/62/3
¶=
7/61/62/3
.(B) (i) Una matriz A tiene inversa si y sólo si |A| 6= 0. Como det(A) =
¯̄̄̄¯̄ −1 0 0
2 2 00 a a− 2
¯̄̄̄¯̄ =
−2(a− 2), se tiene que la matriz A tiene inversa si y sólo si a 6= 2. Ahora calculamos, porel método de Gauss-Jordan, la inversa en función de a, pero suponiendo a 6= 2. −1 0 0
2 2 00 a a− 2
1 0 00 1 00 0 1
F1(−1)−→ 1 0 0
2 2 00 a a− 2
−1 0 00 1 00 0 1
F21(−2)−→
1 0 00 2 00 a a− 2
−1 0 02 1 00 0 1
F2(12)−→ 1 0 0
0 1 00 a a− 2
−1 0 01 1
2 00 0 1
F32(−a)−→
1 0 00 1 00 0 a− 2
−1 0 01 1
2 0−a −a
2 1
F3(1
a−2 )−→ 1 0 0
0 1 00 0 1
−11
−aa−2
0 012 0
−a2(a−2)
1a−2
,luego la inversa de la matriz es A−1 =
−1 0 01 1
2 0−aa−2
−a2(a−2)
1a−2
.

Examen de Junio. Curso 2002-03 24
(ii) Ya hemos visto que A no tiene inversa cuando a = 2. En este caso, la matriz es A = −1 0 02 2 00 2 0
. Por ser una matriz triangular inferior sus autovalores son λ1 = −1, λ2 =
2, λ3 = 0. Como los tres autovalores son distintos, la matriz es diagonalizable y la
matriz diagonal que buscamos es D =
−1 0 00 2 00 0 0
. Para encontrar la matriz de paso Pdebemos encontrar una base de autovectores propios asociados a cada autovalor. Debemosresolver para cada λ el sistema de ecuaciones homogéneo (λI −A)x = 0.
Para λ1 = −1, tenemos el sistema 0 0 0−2 −3 00 −2 −1
x1x2x3
=
000
, cuya solución esx1 = 3tx2 = −2tx3 = 4t
, por lo tanto V (−1) = lin {(3,−2, 4)}
Para λ2 = 2, tenemos el sistema
3 0 0−2 0 00 −2 2
x1x2x3
=
000
, cuya solución esx1 = 0x2 = tx3 = t
, por lo tanto V (2) = lin {(0, 1, 1)} .
Para λ3 = 0, tenemos el sistema
1 0 0−2 −2 00 −2 0
x1x2x3
=
000
, cuya solución esx1 = 0x2 = 0x3 = t
, por lo tanto V (0) = lin {(0, 0, 1)}. Por consiguiente, la matriz de paso pedida
es P =
3 0 0−2 1 04 1 1
.(C) El polinomio de MacLaurin de orden tres de una función f es el polinomio
P3 (x) = f(0) +f 0(0)1!
x+f 00(0)2!
x2 +f 000(0)3!
x3.
Calculamos las derivadas de la función f(x) = ln (1− 2x) y obtenemos f 0 (x) = −21− 2x ;
f 00 (x) =−4
(1− 2x)2 ; f 000 (x) =−16
(1− 2x)3 · Sustituyendo, tenemos que el polinomio de MacLaurin
de orden tres de esta función es P3 (x) = −2x− 2x2 − 83x3.
Si queremos obtener aproximadamente ln (0.998) utilizando el polinomio obtenido anteriormente,observamos que debemos encontrar un valor de x tal que 1−2x = 0.998, es decir x = 0.001. Porlo tanto, ln (0.998) ' P3 (0.001) = −0.002− 0.000002− 0.000000008
3' −0.002002003
PROBLEMA 2.-

Examen de Junio. Curso 2002-03 25
(A) De una matriz simétrica de orden tres B sabemos que tiene por autovalores λ1 = 1,λ2 = −1 yλ3 = 2 y por subespacios propios asociados V (1) = lin {(0, 0, 1)} y V (−1) = lin
½µ1√2,1√2, 0
¶¾.
Se pide:
(i) [1 punto] Encontrar una base del subespacio propio asociado al autovalor λ3 = 2, V (2).
(ii) [3 puntos] Averiguar si la matriz B tiene inversa y en caso afirmativo encontar dichainversa.
(B) [3 puntos] Hallar con dos cifras decimales exactas el punto de la gráfica y =√senx en el
intervalo [0,π/2] más cercano a A (1, 0). En caso de tener que realizar iteraciones tomar comovalor inicial x1 = 0.
(C) [3 puntos] Sabiendo que la ecuación x2 + 2xy + cos y = 0 define a y como función implícita dex, obtener la ecuación de la recta tangente a la gráfica de dicha función en el punto (0,π/2).
Solución
(A) (i) Los autovectores de una matriz simétrica correspondientes a autovalores distintos tienenque ser ortogonales. Observemos que se verifica V (1) ⊥ V (−1). El subespacio propio aso-ciado al autovalor λ3 = 2, V (2), debe cumplir V (2) ⊥ V (1) y V (2) ⊥ V (−1). Por lo tanto,
(x, y, z) ∈ V (2) si y sólo si se cumplen las condiciones (x, y, z) . (0, 0, 1) = 0
(x, y, z) .
µ1√2,1√2, 0
¶= 0
⇒(
z = 0x√2+
y√2= 0 ⇒
x = ty = −tz = 0
, luego el subespacio es V (2) = lin {(1,−1, 0)}. Si ortonor-
malizamos esta base obtenemos V (2) = lin½µ
1√2,− 1√
2, 0
¶¾.
(ii) Nótese que la matriz B posee inversa porque λ = 0 no es autovalor de B.Las matrices simétricas pueden diagonalizarse mediante una matriz de paso ortogonal. Deacuerdo con los datos del problema y siguiendo el primer apartado, tenemos B = PDPT ,
siendo D =
1 0 00 −1 00 0 2
y P =0
1√2
1√2
01√2− 1√
21 0 0
una matriz ortogonal. Como D y P
tienen inversa el producto también la tiene y se verifica que B−1 =¡PDPT
¢−1= PD−1PT ,
ya que P−1 = PT . Así,

Examen de Junio. Curso 2002-03 26
B−1 =
0
1√2
1√2
01√2− 1√
21 0 0
1 0 00 −1 00 0 1
2
0 0 11√2
1√2
0
1√2− 1√
20
=
0 − 1√
2
1
2√2
0 − 1√2− 1
2√2
1 0 0
0 0 11√2
1√2
0
1√2− 1√
20
=
−14−34
0
−34−14
0
0 0 1
(B) Las coordenadas de un punto arbitrario P de la curva y =
√senx son P (x,
√senx). La distancia
desde este punto al punto A(0, 1), viene dada por la fórmula d(A,P ) =q(x− 1)2 + senx. Esta
distancia es mínima si sólo si la distancia al cuadrado es mínima, de aquí que tengamos queminimizar la función f(x) = d(A,P )2 = (x− 1)2 + senx.Empezamos buscando los puntos críticos de la función f(x) = (x− 1)2 + senx. Para ello,calculamos los puntos donde se anulan la derivada primera f 0(x) = 2(x− 1) + cosx. Hemos deresolver la ecuación 2x − 2 + cosx = 0. Si llamamos g(x) = 2x − 2 + cosx, comprobamos queg(0) = −2+ 1 = −1 < 0 y g(π
2) = π− 2 > 0. Además g0(x) = 2− senx > 0, luego esta ecuación
tiene sólo una solución en el intervaloh0,π
2
i, que encontramos utilizando el método de Newton
tomando como punto inicial x1 = 0.
n xn g (xn) g0 (xn)g(xn)g0(xn) xn+1 = xn − g(xn)
g0(xn)
1 0 −1 2 −0.5 0.5
2 0.5 −0.01224124 1.5205745 −0.0805073 0.580507
3 0.580507 −0.00280078 1.4515517 −0.0019295 0.582436
Puesto que |−0.0019295| < 0.01 (o permanecen fijas dos cifras decimales en la segunda y terceraiteración) la solución de la ecuación con al menos dos cifras decimales exactas es x3 = 0.582436.
Por otro lado, f(0) = 1, f(π/2) = 1.3258084 y f(x3) = 0.724965, luego en el punto x3 la funciónf(x) = (x− 1)2 + senx alcanza su mínimo absoluto. Así, el punto de la gráfica y = √senxen el intervalo [0,π/2] más cercano a A (1, 0) es P (0.582436, 0.741660), pues
psen(0.582436) =
0.741660.
(C) La ecuación de la recta tangente a la gráfica de una función derivable f en el punto A(a, f(a))viene dada por la fórmula y − f(a) = f 0(a)(x − a). En nuestro caso, tenemos que calcular laderivada de la función (que está definida implícitamente) en el punto a = 0, f(a) = f(0) = π/2.
Derivamos implícitamente la ecuación dada y obtenemos 2x+ 2y + 2xdy
dx− sen y dy
dx= 0. Susti-
tuyendo los valores x = 0 e y =π
2en dicha ecuación, conseguimos
dy
dx(0) = π. Por lo tanto, la
ecuación de la recta tangente es y − π
2= πx.

Examen de Junio. Curso 2002-03 27
PROBLEMA 3.-
(A) [5 puntos] Calcular el volumen de una esfera de radio a > 0 de las tres formas siguientes:
(i) Considerando la esfera como un sólido de revolución.
(ii) Describiendo el volumen como una integral doble y resolviendo dicha integral usando coor-denadas polares.
(iii) Describiendo el volumen como una integral triple y resolviendo dicha integral usando coor-denadas esféricas.
(B) [2 puntos] Hallar la ecuación del plano tangente y de la recta normal a la superficie de ecuaciónxy2z3 = 12 en el punto (3,−2, 1).
(C) [3 puntos] El material de las tapas superior e inferior de una caja rectangular cuesta 3 eurospor metro cuadrado y el material para los lados 2 euros por metro cuadrado. ¿Cuál es la cajamás barata con un volumen de un metro cúbico?
Solución
(A) (i) La esfera de radio a como sólido de revolución se obtiene cuando la circunferencia deecuación x2 + y2 = a2 gira en torno al eje de las y. Utilizando el método de los discos
obtenemos que el volumene es V = 2πZ a
0y2dx = 2π
Z a
0
¡a2 − x2¢ dx = 2π ·a2x− x3
3
¸a0
=
2π
·a3 − a
3
3
¸=4πa3
3·
(ii) Utilizando integrales dobles y coordenadas polares, el volumen encerrado por la esfera de
ecuación x2+y2+z2 = a2 es V = 2ZZ
R
pa2 − x2 − y2dA, donde es R es la región del plano
xy interior a la circunferencia de ecuación x2 + y2 = a2. Pasando a coordenadas polares
obtenemos V = 2
Z 2π
0
Z a
0
√a2 − r2rdrdθ = 2
Z 2π
0
−q(a2 − r2)33
a0
dθ = 2a3
3
Z 2π
0dθ =
4πa3
3·
(iii) Utilizando integrales triples y coordenadas esféricas obtenemos
V =
ZZZQ
dV =
2πZ0
πZ0
aZ0
ρ2 senφdρdφdθ =
2πZ0
πZ0
a3
3senφdφdθ =
=a3
3
2πZ0
[− cosφ]π0 dθ =2πa3
3
2πZ0
dθ =4πa3
3·
(B) La ecuación del plano tangente a la superficie de ecuación F (x, y, z) = 0 en el punto A(a, b, c)
viene dada por∂F
∂x(A)(x−a)+ ∂F
∂y(A)(y−b)+ ∂F
∂z(A)(z−c) = 0. En nuestro caso, la superficie
tiene de ecuación xy2z3− 12 = 0, por lo tanto ∂F
∂x= y2z3;
∂F
∂y= 2xyz3;
∂F
∂z= 3xy2z2. Por

Examen de Junio. Curso 2002-03 28
lo tanto∂F
∂x(A) = 4;
∂F
∂y(A) = −12; ∂F
∂z(A) = 36. De aquí, la ecuación del plano tangente
a la superficie en el punto A(3,−2, 1) es 4(x− 3)− 12(x+ 2) + 36(z − 1) = 0.La ecuación de la recta normal a la superficie de ecuación F (x, y, z) = 0 en el punto A(a, b, c)viene dada por
x− a∂F
∂x(A)
=y − b∂F
∂y(A)
=z − c∂F
∂z(A)
·
Así, utilizando los cálculos anteriores, obtenemosx− 34
=y + 2
−12 =z − 136
·
(C) Si llamamos x, y, z a las dimensiones de la caja, tenemos que el coste de la misma será c(x, y, z) =6xy + 4xz + 4yz, que es una función de tres variables. Como el volumen de dicha caja debe seruno se debe verificar que x · y · z = 1. Despejando z de esta última ecuación y sustiyendo en laecuación anterior obtenemos que la función que hay que minimizar es C(x, y) = 6xy +
4
x+4
ycon x > 0, y > 0.
Ahora, calculamos los puntos críticos de esta función de dos variables. Para ello debemos resolver
el sistema de ecuaciones
∂C
∂x= 0
∂C
∂y= 0
⇒
6y − 4
x2= 0
6x− 4
y2= 0
⇒½6yx2 = 46xy2 = 4
⇒ 6yx2 = 6xy2 ⇒
x = y ⇒ 6x3 = 4 ⇒ x = 3
r2
3. Luego el único punto crítico de esta función es
Ã3
r2
3, 3
r2
3
!.
Para determinar la naturaleza de dicho punto crítico obtenemos las derivadas parciales segundas
de la función C :∂2C
∂x2=8
x3;
∂2C
∂y2=8
y3;
∂2C
∂x∂y= 6. Calculamos el discriminate en el punto
crítico 4 =
¯̄̄̄12 66 12
¯̄̄̄> 0. Como 4 > 0 y
∂2C
∂x2
Ã3
r2
3, 3
r2
3
!= 12 > 0 deducimos que el punto
crítico es un mínimo relativo para C.
Si observamos la forma que tiene la función C en el dominio en el que estamos trabajando x > 0e y > 0, se deduce que el mínimo relativo es realmente absoluto. Luego las dimensiones de la
caja que dan coste mínimo son x = 3
r2
3, y = 3
r2
3, z =
1
x · y =3
r9
4.
PROBLEMA 4.-
(A) [1 punto] Averiguar si la integral impropiaZ 0
−∞1√1− xdx es convergente y en caso afirmativo
encontrar su valor.
(B) [3 puntos] Calcular el área encerrada por las gráficas de las fuciones siguientes
y = 0, x = 2, x = 2√3, y =
2x2 + 4
x4 + 4x2.
(C) [4 puntos] Calcular el trabajo realizado por los campos de fuerzas→F1 (x, y) = (y
2 + 2 senx cosx− ey2)~i+³2xy − 2xyey2
´~j y
→F2 (x, y) = 2y~i− x~j,
cuando mueven, en sentido contrario a las agujas del reloj, una particula desde el punto (0,−3)hasta el punto (3, 0) a lo largo de la circunferencia de centro el origen y radio 3.

Examen de Junio. Curso 2002-03 29
(D) [2 puntos] El error cometido al medir cada una de las dimensiones de una caja rectangular es de0.01 cm. Las dimensiones de la caja son 50 cm, 40 cm y 20 cm. Usar diferenciales para estimarel error propagado y el error realitvo al calcular el volumen y la superficie de la caja.
Solución
(A)Z 0
−∞1√1− xdx = lim
b→−∞
Z 0
b
1√1− xdx = − lim
b→−∞
Z 0
b−(1− x)−12 dx =
= − limb→−∞
·√1− x1/2
¸0b
= −2·1− lim
b→−∞√1− b
¸= +∞, luego esta integral es divergente.
(B) La función y =2x2 + 4
x4 + 4x2, es continua y estrictamente positiva en el intervalo
£2, 2√3¤. Por
lo tanto, el área encerrada por estas gráficas es A =
Z 2√3
2
2x2 + 4
x4 + 4x2dx. Para calcular esta
integral definida obtenemos en primer lugar una primitiva deZ
2x2 + 4
x4 + 4x2dx y para ello des-
componemos la función racional2x2 + 4
x4 + 4x2en suma de fracciones simples. Como x4 + 4x2 =
x2¡x2 + 4
¢, tenemos que buscar una descomposición de
2x2 + 4
x4 + 4x2en la forma
2x2 + 4
x4 + 4x2=
A
x+B
x2+Cx+D
x2 + 4. Sumando estas tres últimas fracciones obtenemos
A
x+B
x2+Cx+D
x2 + 4=
A(x3 + 4x) +B(x2 + 4) + (Cx+D)x2
x4 + 4x2=
=(A+ C)x3 + (B +D)x2 + 4Ax+ 4B
x4 + 4x2=
2x2 + 4
x4 + 4x2. De donde obtenemos
A+ C = 0B +D = 2
4A = 04B = 4
⇒
A = 0;C = 0;B = 1;D = 1. Es decir2x2 + 4
x4 + 4x2=1
x2+
1
x2 + 4
Por lo tanto A =Z 2
√3
2
2x2 + 4
x4 + 4x2dx =
Z 2√3
2
µ1
x2+
1
x2 + 4
¶dx =
·−1x+1
2arctan
³x2
´¸2√32
=1
2− 1
2√3+
π
6− π
8=
√3− 12√3+
π
24
(C) El trabajo realizado por un campo de fuerzas ~F cuando desplaza una particula a lo largo de un
camino C es W =
ZC
~F · d~r. Nos están pidiendo, por tanto, que calculemos dos integrales delineas de campos vectoriales. Averiguamos si algunos de los campos que nos dan es conservativo,pues en ese caso podría utilizarse el teorema fundamental de las integrales de lineas.
Para el campo ~F1,tenemos que∂³y2 + 2 senx cosx− ey2
´∂y
= 2y − 2yey2 y∂³2xy − 2xyey2
´∂x
=
2y − 2yey2, luego el campo es conservativo. Existe por tanto una función potencial f(x, y) paraeste campo. Es decir, existe una función f(x, y) tal que ~∇f = ~F1. Esta función debe satisfacer
∂f
∂x= y2 + 2 senx cosx− ey2 ,
∂f
∂x= 2xy − 2xyey2 .
Integrando la primera ecuación respecto de x obtenemos que

Examen de Junio. Curso 2002-03 30
f(x, y) = xy2 − xey2 + sen2 x + g(y). Derivando esta ecuación respecto de y e igualando a lasegunda ecuación obtenemos g0(y) = 0, luego g(y) = C que puede tomarse cero. Por lo tanto,una función potencial para ~F1 es f(x, y) = xy2 − xey2 + sen2 x. Ahora, el trabajo realizado porel campo
→F 1 es
W1 =
ZC
~F1 · d~r = f(3, 0)− f(0,−3) = −3 + sen2 3.
El segundo campo no es conservativo ya∂ (2y)
∂y= 2 y
∂ (−x)∂x
= −1. En este caso, si queremoscalcular la integral de linea tenemos que parametrizar el camino. Una posible paramatrización
de dicho camino es C ≡½x = 3 cos t,y = 3 sen t,
con t ∈h−π2, 0iy el trabajo es
W2 =
ZC
~F2 · d~r =Z 0
−π2
¡−18 sen2 t− 9 cos2 t¢ dt = Z 0
−π2
¡−9 sen2 t− 9¢ dt == −9
Z 0
−π2
µ1− cos 2t
2
¶dt− 9
³π2
´= −27
4π.
(D) Si denominamos x, y, z a las dimensiones de la caja rectangular, entonces el volumen y la super-ficie son V = x · y · z y S = 2 · x · y + 2 · x · z + 2 · y · z, respectivamente.Puesto que x = 50, y = 40, z = 20 y dx = dy = dz = 0.01, resulta que el error propagado alcalcular el volumen es
∆V ' dV = ∂V
∂xdx+
∂V
∂ydy +
∂V
∂zdz = yzdx+ xzdy + xydz = 38
y el correspondiente error relativo es∆V
V' dV
V=
38
50 · 40 · 20 = 0.00095.Análogamente, para la superficie tenemos que el error propagado es
∆S ' dS = ∂S
∂xdx+
∂S
∂ydy +
∂S
∂zdz = (2y + 2z) dx+ (2x+ 2z)dy + (2x+ 2y)dz = 4.40
y el error relativo es∆S
S' dS
S=4.40
7600= 0.000578.

Examen de Septiembre. Curso 2002-03
PROBLEMA 1.—
(A) Considérese, dependiente del parámetro real a, el sistema de ecuaciones linealesx+ y + z = 3,x− y + z = 1,2x+ az = 5.
(i) [2 puntos] Estudiar, en función del parámetro a, la compatibilidad del sistema.
(ii) [2 puntos] Cuando el sistema sea compatible determinado resolverlo utilizando el métodode Gauss. ¿Para qué valores de a existe la inversa de la matriz de coeficientes? Encontrarla inversa de dicha matriz para a = 3.
(iii) [4 puntos] Encontrar, en función de a, la dimensión del subespacio vectorial generadopor el conjunto de vectores {(1, 1, 2), (1,−1, 0), (1, 1, a)}. Obtener la proyección del vector(3, 1, 5) sobre dicho subespacio.
(B) [2 puntos] Utilizando derivación implícita, encontrar la recta tangente a la curva de ecuaciónx3y + y4 = 2 en el punto (1, 1). Calcular además el polinomio de Taylor de segundo orden dey = f(x) centrado en x = 1.
Solución:
(A) (i) Determinamos la compatibilidad del sistema realizando transformaciones elementales en sumatriz ampliada. 1 1 1
1 −1 12 0 a
315
F21(−1)−→F31(−2)
1 1 10 −2 00 −2 a− 2
3−2−1
F2(−1/2)−→ 1 1 1
0 1 00 −2 a− 2
31−1
F32(2)−→
1 1 10 1 00 0 a− 2
311
.De aquí deducimos que el sistema es compatible determinado para a 6= 2 e incompatiblepara a = 2.
(ii) Resolvemos el sistema mediante el método de Gauss para a 6= 2. En este caso, sólo nos hacefalta añadir una transformación más al conjunto de transformaciones elementales realizadasen el apartado (i). 1 1 1
0 1 00 0 a− 2
311
F3( 1a−2)−→
1 1 10 1 00 0 1
31
1/(a− 2)
.31

Examen de Septiembre. Curso 2002-03 32
Así, se obtiene el sistema triangular superior
x+ y + z = 3
y = 1z = 1
a−2cuya única solución es
x =2a− 5a− 2 , y = 1, z =
1
a− 2 ·
El primer grupo de transformaciones elementales realizadas en el apartado (i) nos indicaque la matriz de coeficientes del sistema tiene determinante −2(a−2). Luego, dicha matrizposee inversa si y sólo si a 6= 2.De nuevo, algunas de las transformaciones anteriores nos facilitan el cálculo de la inversade la matriz de coeficientes para a = 3. Aplicamos el método de Gauss—Jordan para talcometido. 1 1 1
1 −1 12 0 3
1 0 00 1 00 0 1
F21(−1)−→F31(−2)
1 1 10 −2 00 −2 1
1 0 0−1 1 0−2 0 1
F2(−1/2)−→ 1 1 1
0 1 00 −2 1
1 0 01/2 −1/2 0−2 0 1
F32(2)−→ 1 1 1
0 1 00 0 1
1 0 01/2 −1/2 0−1 −1 1
F13(−1)−→ 1 1 0
0 1 00 0 1
2 1 −11/2 −1/2 0−1 −1 1
F12(−1)−→ 1 0 0
0 1 00 0 1
3/2 3/2 −11/2 −1/2 0−1 −1 1
.Por consiguiente, la inversa pedida es
3/2 3/2 −11/2 −1/2 0−1 −1 1
.(iii) La dimensión del subespacio S = lin ({(1, 1, 2), (1,−1, 0), (1, 1, a)}) coincide con el rango de
la matriz A =
1 1 11 −1 12 0 a
. Esta matriz es la matriz de coeficientes del sistema dado yutilizando las transformaciones realizadas en el primer aparatado, tenemos que dim(S) = 3si a 6= 2 y dim(S) = 2 para a = 2. Observar que para el caso a 6= 2, tenemos S = R3 y porconsiguiente, proyS(3, 1, 5) = (3, 1, 5).Ahora, para a = 2, calculamos proyS(3, 1, 5) teniendo en cuenta que una base de S estádada por el conjunto {~a1 = (1, 1, 2),~a2 = (1,−1, 0)}. Obsérvese que ~a1 y ~a2 son ortogonalesy ½
~b1 =
µ1√6,1√6,2√6
¶,~b2 =
µ1√2,− 1√
2, 0
¶¾es una base ortonormal de S. Por consiguiente, poniendo ~b = (3, 1, 5) tenemos
proyS~b =
³~b1 ·~b
´~b1+
³~b2 ·~b
´~b2 =
14√6
µ1√6,1√6,2√6
¶+2√2
µ1√2,− 1√
2, 0
¶=
µ10
3,4
3,14
3
¶.
(B) Derivando implícitamente, respesto de x, en la ecuación x3y + y4 = 2 obtenemos
3x2y + x3y0 + 4y3y0 = 0. (1)
Sustituyendo x = 1 e y = 1 en la ecuación (1) se consigue 3+y0+4y0 = 0, de donde y0(1) = −3/5.Así, la ecuación de la recta tangente pedida es y − 1 = −3/5(x− 1).Derivando implícitamente, respecto de x, en (1) se tiene
6xy + 3x2y0 + 3x2y0 + x3y00 + 12y2¡y0¢2+ 4y3y00 = 0.

Examen de Septiembre. Curso 2002-03 33
Eligiendo x = 1, y = 1 e y0 = −3/5 en la ecuación anterior tenemos
6 + 2 · 3 · −35+ y00 + 12 ·
µ−35
¶2+ 4y00 = 0
y por consiguiente, y00(1) = −168125
.
De esta forma, el polinomio de Taylor de orden dos de y = f(x) centrado en x = 1 viene dadopor
P2(x) = y(1) + y0(1)(x− 1) + y
00(1)2!
(x− 1)2 = 1− 35(x− 1)− 84
125(x− 1)2.
PROBLEMA 2.—
(A) [4 puntos] Una matriz A de orden dos satisface las siguientes condiciones:
• Aµ
1−1
¶=
µ31
¶.
• El vector ~v =µ
2−1
¶es autovector de A asociado al autovalor λ = −2.
Obtener la matriz A. ¿Es diagonalizable? En caso afirmativo, obtener una matriz D diagonal yuna matriz de paso P tal que A = PDP−1.
(B) [3 puntos] Expresar la integral Z π/4
0
Z 3
0r2 cos θ drdθ
en coodernadas cartesianas y calcularla en coordenadas polares y cartesianas.
(C) [3 puntos] Tomando como punto inicial x1 = π/4, encontrar, con un error menor que 0.001, lasolución de la ecuación cosx− x = 0.Calcular el máximo absoluto de f(x) = 2 senx− x2 en el intervalo [0,π/2] y realizar un esbozode la gráfica de f en dicho intervalo.
Solución:
(A) Si ~v =µ
2−1
¶es autovector de A asociado al autovalor λ = −2, entonces A ·
µ2−1
¶=
−2 ·µ
2−1
¶=
µ −42
¶.
Esta condición unida a la primera, A ·µ
1−1
¶=
µ31
¶, pueden expresarse de forma conjunta
mediante
A ·µ
2 1−1 −1
¶=
µ −4 32 1
¶,

Examen de Septiembre. Curso 2002-03 34
de donde la matriz A es A =µ −4 3
2 1
¶·µ
2 1−1 −1
¶−1=
µ −7 −101 0
¶, pues
¯̄̄̄2 1−1 −1
¯̄̄̄=
−1 6= 0, lo que nos indica que la matrizµ
2 1−1 −1
¶es regular.
Ahora veremos si la matriz A =
µ −7 −101 0
¶es diagonalizable. Para ello, calculamos en
primer lugar su polinomio característico pA (λ) = det(A−λI) =¯̄̄̄ −7− λ −10
1 −λ¯̄̄̄= λ2+7λ+10.
Sabemos que λ1 = −2 es un autovalor de A y es fácil comprobar que λ2 = −5 es el otro autovalor.Así, puesto que A es una matriz de orden dos y posee dos autovalores diferentes, concluimos quela matriz A es diagionalizable y cada uno de los subespacios propios tiene dimensión uno.
De acuerdo con los datos del problema, el subespacio asociado al primer autovalor es V (−2) =lin({(2,−1)}) y para obtener el segundo subespacio propio, debemos resolver el sistema
(A− λ2I)
µxy
¶=
µ00
¶.
Dicho sistema se reduce a la ecuación x + 5y = 0, por lo que V (−5) = lin({(−5, 1)}). De estamanera, podemos tomar como una matriz diagonal D =
µ −2 00 −5
¶y como matriz de paso
P =
µ2 −5−1 1
¶.
(B) La integralZ π/4
0
Z 3
0r2 cos θ drdθ =
Z π/4
0
Z 3
0r cos θ · r drdθ puede escribirse en coordenadas
cartesinas en la forma Z π/4
0
Z 3
0r cos θ · rdrdθ =
ZZRxdA,
donde R = {(x, y) ∈ R2 : 0 ≤ y ≤ x, x2 + y2 ≤ 9}.La región R corresponde a un octavo del círculo de centro el origen y radio 3 y puede expresarsecomo una región horizontalmente simple en la forma
R = {(x, y) ∈ R2 : 0 ≤ y ≤ 3√2, y ≤ x ≤
p9− y2},
luegoZZRxdA =
Z 3/√2
0
Z √9−y2y
xdxdy =
Z 3/√2
0
·x2
2
¸√9−y2y
dy =1
2
Z 3/√2
0
¡9− 2y2¢ dy =
=1
2
·9y − 2
3y3¸3/√20
=1
2
µ27√2− 23· 272√2
¶=9
2
√2.
Por último, calculamos la integral dada en polaresZ π/4
0
Z 3
0r2 cos θ drdθ =
Z π/4
0
·r3
3
¸30
cos θ dθ =
Z π/4
09 cos θ dθ = 9 sen
³π4
´=9
2
√2.
(C) Denotemos g(x) = cosx − x. Puesto que g es continua en [0,π/2], g(0) = 1 > 0 y g(π/2) =−π/2 < 0, deducimos g posee al menos una raíz x∗ en el intervalo (0,π/2). Además, g0(x) =− senx− 1 ≤ 0 para todo x ∈ R y puede probarse con facilidad x∗ es la única raíz real de g.

Examen de Septiembre. Curso 2002-03 35
Ahora aplicamos el método de Newton a la función g para obtener el valor x∗. Comenzamos porel punto inicial x1 = π/4.
n xn g(xn) g0(xn)g(xn)
g0(xn)xn+1 = xn − g(xn)
g0(xn)1
π
4= 0.78539816 −0.07829138 −1.70710678 0.04586202 0.73953613
2 0.73953613 −0.00075486 −1.67394528 0.00045095 0.73908517
Como |x3 − x2| =¯̄̄̄g(x2)
g0(x2)
¯̄̄̄= 0.00045095 < 0.001 (o han permanecido fijos los tres primeros
decimales en la segunda y tercera iteración), deducimos que x∗ es, al menos con tres cifrasdecimales exactas, x∗ = x3 = 0.73908517.
Seguidamente realizamos el estudio solicitado sobre la función f(x) = 2 senx − x2. En primerlugar, puesto que la función es derivable en el intervalo abierto (0,π/2), calculamos los puntoscrítico de f, resolviendo la ecuación f 0(x) = 2 cosx − 2x = 0 en el intervalo (0,π/2). Así, lospuntos críticos de f en (0,π/2) son la soluciones en (0,π/2) de la ecuación cosx− x = 0.Por otra parte, f 0(x) = 2g(x) > 0 para todo x ∈ (0, x∗) y f 0(x) = 2g(x) < 0 para todox ∈ (x∗,π/2). Luego, f es estrictamente creciente en el intervalo (0, x∗), estrictamente decrecienteen el intervalo (x∗,π/2) y el máximo de f se alcanza en el punto x∗, siendo el valor del máximof(x∗) = 2 sen(x∗)− (x∗)2 ' 0.80097722. Más aún, f(0) = 0 y f(π/2) = ¡8− π2
¢/4 < 0, luego el
mínimo de f se toma en x = π/2 y su valor mínimo es¡8− π2
¢/4.
La información anterior nos permite esbozar la gráfica de f que se muestra en la Figura 6.
x*
π/2
Figura 6: Gráfica de f(x) = 2 senx− x2 en el intervalo [0,π/2].
PROBLEMA 3.—
(A) [5 puntos] Calcular el volumen de la región acotada por arriba por la superficie esférica
x2 + y2 + z2 = 2 y por abajo por el paraboloide z = x2 + y2.

Examen de Septiembre. Curso 2002-03 36
(B) [2 puntos] CalcularZZZ
Qe√x2+y2+z2dV , donde
Q = {(x, y, z) ∈ R3 : x2 + y2 + z2 ≤ 1, z ≥ 0}.
(C) [3 puntos] El material de las tapas superior e inferior de una caja rectangular cuesta 1 euro pormetro cuadrado, el frente y la parte posterior 2 euros por metro cuadrado y los laterales 3 eurospor metro cuadrado . ¿Cuál es la caja más barata con un volumen de 48 metros cúbicos?
Solución:
(A) En primer lugar, determinamos la intersección entre la esfera y el paraboloide. Para este
cometido, resolvemos el sistema de ecuaciones½x2 + y2 + z2 = 2,z = x2 + y2.
Éste nos lleva a la ecuación
z2+z−2 = 0, cuya única solución positiva es z = 1; es decir, la esfera y el paraboloide se cortanen la circuferencia, x2 + y2 = 1, z = 1, cuya proyección en el plano xy es la frontera del círculoR = {(x, y) ∈ R : x2 + y2 ≤ 1}. Por tanto, el volumen pedido viene dado por
V =
ZZR
³p2− x2 − y2 − ¡x2 + y2¢´ dA.
Ahora bien, este volumen puede calcularse de una forma simple si aplicamos un cambio a coor-denadas polares. De esta manera,
V =
ZZR
³p2− x2 − y2 − ¡x2 + y2¢´ dA = Z 2π
0
Z 1
0
³√2− r2 − r2
´rdrdθ =
=
Z 2π
0
·−13
¡2− r2¢3/2 − r4
4
¸10
dθ =
Z 2π
0
8√2− 712
dθ =8√2− 76
π.
(B) Para calcular la integral tripleZZZ
Qe√x2+y2+z2dV, siendo Q = {(x, y, z) ∈ R3 : x2+ y2+ z2 ≤
1, z ≥ 0}, aplicamos un cambio a coordenadas esféricas. Así, la integral solicitada queda de laforma ZZZ
Qe√x2+y2+z2dV =
Z 2π
0
Z π/2
0
Z 1
0eρρ2 senφdρdφdθ.
Aplicando dos veces el método de integración por partes, tenemosZρ2eρdρ =
·u = ρ2 du = 2ρdρdv = eρdρ v = eρ
¸= ρ2eρ − 2
Zρeρdρ =
·u = ρ du = dρ
dv = eρdρ v = eρ
¸=
= ρ2eρ − 2µρeρ −
Zeρdρ
¶= ρ2eρ − 2ρeρ + 2eρ + C
y la integral en coordenadas esféricas esZ 2π
0
Z π/2
0
Z 1
0eρρ2 senφdρdφdθ =
Z 2π
0
Z π/2
0
£ρ2eρ − 2ρeρ + 2eρ¤1
0senφdφdθ =
Z 2π
0
Z π/2
0(e −
2) senφdφdθ =
= (e− 2)Z 2π
0[− cosφ]π/20 dθ = 2(e− 2)π.

Examen de Septiembre. Curso 2002-03 37
(C) Si las dimensiones de la caja son denotadas mediante x, y y z, entonces el coste de fabricaciónde la misma admite la formulación
c(x, y, z) = 2xy + 6xz + 4zy.
Puesto que deseamos encontrar la caja más barata con un volumen de 48 m3, debe tenersexyz = 48. De aquí, se deduce que x > 0, y > 0 y z > 0. Despejando, z = 48
xy y la función aminimizar es
C(x, y) = 2xy + 6 · 48y+ 4 · 48
x= 2xy +
288
y+192
x, con x > 0, y > 0.
Comenzamos calculando los puntos críticos de la función C. Para ello, resolvemos el sistema deecuaciones
∂C
∂x(x, y) = 2
yx2 − 96x2
= 0
∂C
∂y(x, y) = 2
xy2 − 144y2
= 0
y encontramos que (x, y) = (4, 6) es el único punto crítico de la función C.
Seguidamente clasificamos este punto crítico a partir de las derivadas parciales de segundo ordende C en dicho punto.
∂2C
∂x2(x, y) =
384
x3=⇒ ∂2C
∂x2(4, 6) =
384
43= 6
∂2C
∂y2(x, y) =
576
y3=⇒ ∂2C
∂y2(4, 6) =
576
63=8
3
∂2C
∂x∂y(x, y) =
∂2C
∂y∂x(x, y) = 2
Puesto que∂2C
∂x2(4, 6) = 6 > 0 y
¯̄̄̄¯̄̄̄ ∂2C
∂x2(4, 6)
∂2C
∂x∂y(x, y)
∂2C
∂x∂y(x, y)
∂2C
∂y2
¯̄̄̄¯̄̄̄ = ¯̄̄̄ 6 2
2 8/3
¯̄̄̄= 12 > 0, resulta que
el punto crítico (4, 6) es un mínimo relativo para C.
A partir de la estructura de la función C puede probarse que el punto (4, 6) es mínimo absoluto
y por consiguiente las dimensiones de la caja son x = 4, y = 6 y z =48
xy=
48
4 · 6 = 2.
PROBLEMA 4.—
(A) [1 punto] Averiguar si la integral impropiaZ 1
0
1
3
q(1− x)2
dx es convergente y en caso afirmativo,
encontrar su valor.
(B) [5 puntos] ¿Para qué valores a ∈ R es conservativo el campo vectorial~F (x, y) = (4xy + sen y, ax2 + x cos y)?

Examen de Septiembre. Curso 2002-03 38
Para aquellos valores a en los que ~F sea conservativo obtener una función potencial para ~F .
Calcular, para esos valores de a,ZC
~F · d~r, siendo C la unión de los segmentos rectos que unenlos puntos (0, 0), (1, 0) y (2,π/2).
Obtener ademásZCxyds.
(C) [4 puntos] Realizar un esbozo de la gráfica de la función f(x) = x3 + x2 + 1 y calcular elvolumen del sólido de revolución que se obtiene girando alrededor del eje y la región limitadapor las gráficas de y = f(x), x = 1, x = 3 y el eje de las x.
Solución:
(A) La integralZ 1
0
1
3
q(1− x)2
dx es impropia pues f(x) =1
3
q(1− x)2
es continua en [0, 1) y limx→1−
f(x) =
+∞. Averiguamos si la integral es convergente:Z 1
0
1
3
q(1− x)2
dx = limb→1−
Z b
0
1
3
q(1− x)2
dx = limb→1−
Z b
0(1− x)−2/3dx = lim
b→1−£−3(1− x)1/3¤b
0=
= limb→1−
−3(1− b)1/3 + 3 = 3
y comprobamos que la integral si es convergente y su valor esZ 1
0
1
3
q(1− x)2
dx = 3.
(B) Pongamos ~F (x, y) = (M(x, y), N(x, y)) , con M(x, y) = 4xy + sen y y N(x, y) = ax2 + x cos y.
Entonces, el campo vectorial ~F es consevativo si y sólo si∂M
∂y(x, y) =
∂N
∂x(x, y), esto es, si y
sólo si
4x+ cos y = 2ax+ cos y.
Por tanto, el campo es conservativo si y sólo si a = 2.
A continuación calcularemos una función potencial f de ~F cuando a = 2. La función potencial f
debe satisfacer∂f
∂x(x, y) =M(x, y) = 4xy+sen y, de donde, f(x, y) = 2x2y+x sen y+ϕ(y). Pero,
utilizando que también satisface∂f
∂y(x, y) = N(x, y) = 2x2 + x cos y, llegamos a 2x2 + x cos y =
2x2 + x cos y + ϕ0(y), por lo que ϕ(y) = C (que puede tomarse nula) y una función potencial esf(x, y) = 2x2y + x sen y.
Para a = 2 aplicamos el Teorema Fundamental de las Integrales de Línea para escribirZC
~F · d~r = f(2,π/2)− f(0, 0) = 4π + 2.
Seguidamente calculamosZCxyds. Para ello, descomponemos C en la forma C = C1 ∪ C2,
donde C1 y C2 admiten las parametrizaciones
C1 ≡ ~r1(t) = t ~i, t ∈ [0, 1] y C2 ≡ ~r2(t) = (1 + t)~i + tπ2~j t ∈ [0, 1],
y escribimosZCxyds =
ZC1
xyds+
ZC2
xyds =
Z 1
0t · 0dt+
Z 1
0(1 + t)t
π
2
√4 + π2
2dt =
5
24πp(4 + π2).

Examen de Septiembre. Curso 2002-03 39
(C) Comenzamos viendo que la función f(x) = x3+x2+1 es continua e indefinidamente derivable entodo R, por tratarse de un polinomio. Los puntos críticos de f son las soluciones de la ecuaciónf 0(x) = 3x2 + 2x = 0, es decir, x = 0 y x = −2/3.Puesto que f 00(x) = 6x+ 2 = 0 si y sólo si x = −1/3, f 00(x) = 6x+ 2 > 0 si y sólo si x > −1/3y f 00(x) = 6x + 2 < 0 si y sólo si x < −1/3, deducimos que f pose un punto de inflexiónpara x = −1/3, es cóncava hacia arriba en el intervalo (−1/3,+∞) y cóncava hacia abajo en elintervalo (−∞,−1/3).Además, f 00(0) = 2 > 0, por lo que f posee un mínimo relativo en x = 0 y f 00(−2/3) =−2 < 0, de donde f posee un mínimo realtivo para x = −2/3. Por lo tanto, f es creciente en(−∞,−2/3) ∪ (0,+∞) y decreciente en (−2/3, 0).Por otra parte, la gráfica de f no presenta ningún tipo de asíntotas y como
limx→+∞ f(x) = lim
x→+∞x3 + x2 + 1 = +∞ y lim
x→−∞ f(x) = limx→−∞x
3 + x2 + 1 = −∞,
la función f presenta, por continuidad, al menos una raíz real. Más aún, f(0) = 1 > 0 yf(−2/3) = 31/27 > 0, por lo que la raíz real es única y se encuentra en el intervalo (−∞,−2/3).El análisis anterior permite realizar el esbozo de la gráfica de f mostrado en la Figura 7.
-2/3 -1/3 0 x
y
Figura 7: Esbozo de la gráfica de la función f(x) = x3 + x2 + 1.
El volumen solicitado se calcula mediante el método de las capas:
V = 2π
Z 3
1x¡x3 + x2 + 1
¢dx = 2π
Z 3
1
¡x4 + x3 + x
¢dx =
724
5π.