espaciosvectoriales2014 tema 1
TRANSCRIPT

ETSII-UPM
Tema 1:Los espacios vectoriales Rn y Cn
Álgebra (Plan 2010)Madrid, 8-12 de septiembre de 2014
Profesores de Álgebra (formato de Javier García de Jalón)ETSII - Departamento de Matemática Aplicada
a la Ingeniería Industrial

ETSII-UPM
2
Programa Álgebra 2014Los espacios vectoriales Rn y Cn
MotivaciónDefinición propiedades y ejemplos
Combinaciones lineales. Clausura lineal.Dependencia e independencia lineal. Subespacios vectoriales.
BasesBases. Dimensión. Coordenadas respecto a una base Intersección y suma de subespacios. Suma directa. Subespacios suplementarios.La relación de Grassmann.
Ejercicios y cuestiones (transparencias aparte)

ETSII-UPM
3
Motivación Cómo se comportan los vectores 2-D de la Física (origen en el (0,0))
Los vectores pueden ser sumadosy multiplicados por escalares, y losresultados son también vectores
Los vectores pueden ser combinados linealmentepara obtener cualquier otro vector
Se pueden definir basesen las que cualquier vector se expresa de forma única
Los sistemas generadores permiten definir cualquier vector de múltiplesformas (contienen bases con vectores adicionales)

ETSII-UPM
Espacios vectoriales 1/3Motivación
Estudiaremos los espacios vectoriales Rn y Cn, generalizaciones del plano y espacio euclídeos ordinarios, y de las magnitudes vectoriales de la física. Son conjuntos cuyos elementos −vectores− pueden sumarse entre sí y ser multiplicados por números −escalares−, obteniéndose nuevos vectores.
Nota: En lo que sigue, la letra K denotará indistintamente el cuerpo R de los números reales o el cuerpo C de los números complejos. Utilizamos el mismo símbolo “+” para denotar la suma en el espacio (suma de vectores) y la suma en el cuerpo K. El símbolo “·” denota la ley externa en (producto de escalar por vector). En ocasiones este símbolo se omite.
Definición del espacio vectorial Si n es cualquier entero positivo, definimos el espacio como el conjunto de las n-uplas ordenadas de elementos de K, es decir:
Los elementos de se llaman vectores. Los elementos se denominan componentes del vector. 4
ETSII-UPM
Espacios vectoriales 2/3Definición de suma de vectores en
Propiedades de la suma:La suma de vectores de es una ley de composición interna en (es decir, a cada par de vectores de le asocia un nuevo vector de ) que verifica las siguientes propiedades:
Estas cuatro propiedades se deducen inmediatamente de las de la suma de números reales o complejos, y dotan a la dupla ( +) de la estructura de grupo abeliano.
Definición de vector nuloLlamamos vector nulo de y lo denotamos por 0, al vector (0, 0, . . . , 0), es decir, el elemento neutro de la suma de vectores.
Definición de vector opuesto Dado un vector su opuesto es el vector es decir, su elemento simétrico respecto a la suma de vectores. 5

ETSII-UPM
Espacios vectoriales 3/3Definición de producto de escalar por vector (ley externa de )
Propiedades de la ley externa:La ley externa, con la suma de vectores, verifica las siguiente propiedades:
Estas propiedades se deducen de las de la suma y el producto de números reales o complejos. Las propiedades 1 a 8 dotan a la cuaterna ( K,+, ·) de la estructura de espacio vectorial: es un espacio vectorial sobre K.
Propiedades adicionales:De las 8 propiedades enunciadas −que constituyen los axiomas de espacio vectorial−, o bien de las propiedades de suma y producto de números reales y complejos, se deducen las siguientes propiedades
6

ETSII-UPM
7
Combinaciones lineales 1/3Definición de combinación lineal
Una combinación lineal de los vectores de es cualquier vector de la forma:
siendo
ObservacionesEl vector nulo es combinación lineal de cualesquiera vectores (con coeficientes nulos). Todo vector es combinación lineal de sí mismo.
EjemploEn el vector es combinación lineal de los vectores y
ya que

ETSII-UPM
Definición de clausura linealDado un conjunto se define la clausura lineal de M, y se denota por
como el conjunto de todas las combinaciones lineales de vectores del conjunto M.
ObservacionesPara se adopta el convenio La clausura lineal es un subespacio vectorial, que también se denomina subespacio generado por M. Cualquier subespacio que contenga al conjunto Mnecesariamente contiene a
EjemploEn sea es el conjunto de vectores de la forma
con escalares reales, es decir:
El vector del ejemplo anterior pertenece a pues se obtiene para
8
Combinaciones lineales 2/3
ETSII-UPM
9
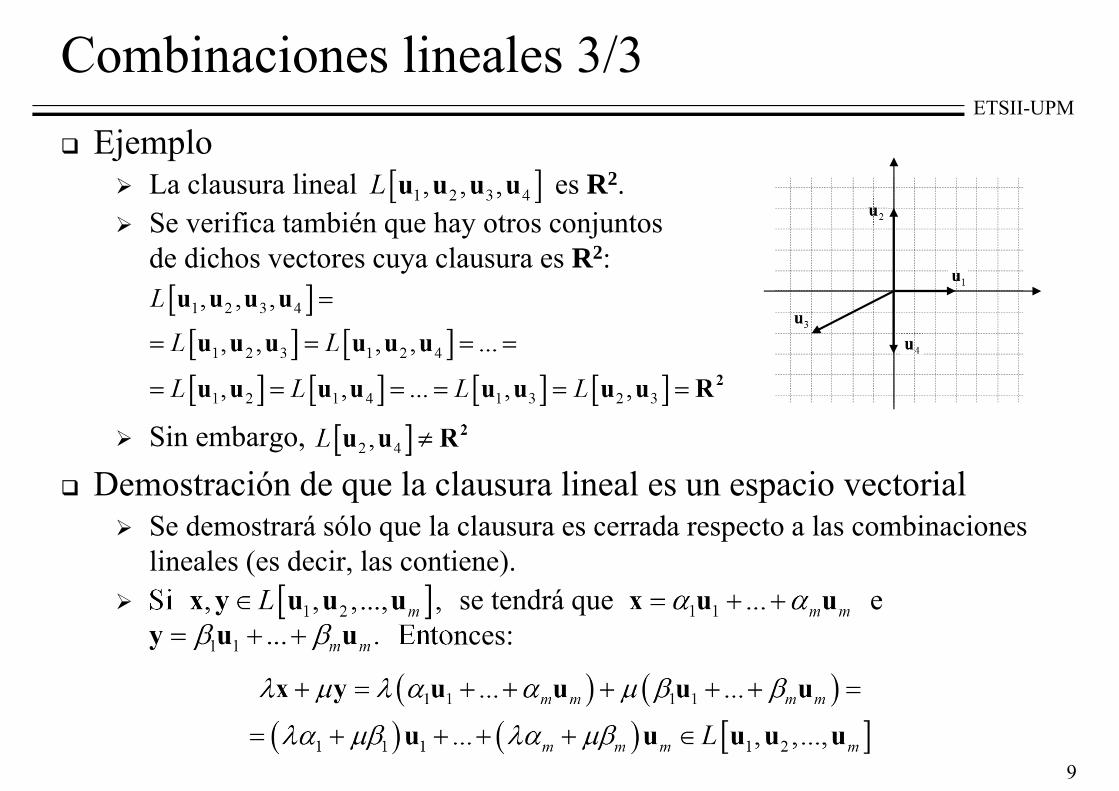
Combinaciones lineales 3/3Ejemplo
La clausura lineal es R2.Se verifica también que hay otros conjuntosde dichos vectores cuya clausura es R2:
Sin embargo,
Demostración de que la clausura lineal es un espacio vectorialSe demostrará sólo que la clausura es cerrada respecto a las combinaciones lineales (es decir, las contiene).Si se tendrá que e
Entonces:
ETSII-UPM
10
Dependencia e independencia lineal 1/4Definición de independencia lineal
Los vectores de un espacio vectorial son linealmente independientes si la única combinación lineal de ellos igual al vector nulo es la que tiene todos los coeficientes nulos, es decir,
En caso contrario, se dice que los vectores anteriores son linealmente dependientes.
ObservaciónLos vectores son linealmente dependientes si y sólo si
Lo anterior equivale a que se pueda despejar alguno de los vectores como combinación lineal de los restantes, es decir,
Basta considerar un cuyo en la combinación lineal que da el vector nulo.

ETSII-UPM
11
Dependencia e independencia lineal 2/4Definición de familia libre y familia ligada
Sea se dice que S es una familia libre si son vectores linealmente independientes; en caso contrario, se dice que S es una familia ligada.
RecapitulandoCualquier subconjunto de una familia libre es libre.Cualquier familia que contenga el vector nulo es una familia ligada, ya quesi por ejemplo se tendrá:Cualquier familia que contenga dos vectores proporcionales es ligada.La unión de una familia ligada con cualquier otra siempre es ligada.Una familia S es ligada si y sólo si algún vector de S es combinación lineal de los restantes vectores de S.La familia S es libre si y sólo si ningún vector de S es combinación lineal de los restantes vectores de S.
EjemploEn los vectores se conocen como vectores canónicos. Forman una familia libre, pues si
ETSII-UPM
Dependencia e independencia lineal 3/4Ejemplos
En es una familia libre, ya que
Los tres vectores son linealmente independientes.En el mismo espacio, la familia
es ligada, ya que
lo que equivale a que
Los tres vectores dados son linealmente dependientes.Nota:
Por razones que se verán más adelante en este mismo tema, adoptamos el convenio de considerar el conjunto vacío, ∅, como una familia libre.
12

ETSII-UPM
13
Dependencia e independencia lineal 4/4Ejemplos gráficos en el plano
En la figura superior los vectores son independientes. Es imposible sumarlos multiplicados por escalares no nulos y obtener el vector nulo.En la figura inferior los vectores son dependientes. Se tiene que:
lo que permite por ejemplo expresar en función de los otros dos vectores,
En R2 cualquier familia de más de dos vectores serán linealmente dependientes.

ETSII-UPM
14
Subespacios vectoriales 1/2Definición de subespacio vectorial
Un subespacio vectorial de es cualquier subconjunto de dicho espacio que sea cerrado para la suma y para el producto por escalares, es decir:
Nótese que los apartados 2. y 3. pueden escribirse conjuntamente en la forma:
Un subespacio vectorial es pues un conjunto no vacío y cerrado para las combinaciones lineales.
ObservaciónEl espacio vectorial es subespacio de sí mismo; además, en todo espacio vectorial, el conjunto formado únicamente por el vector nulo, constituye un subespacio que llamaremos subespacio nulo. Estos dos subespacios son los llamados subespacios triviales.

ETSII-UPM
Subespacios vectoriales 2/2Ejemplos
En consideramos el subconjunto que obviamente contiene el (0,0,0,0), es un subespacio vectorial; en efecto, sean es decir, que satisfacen que Para cualesquiera el vector
tiene como primera componente que es precisamente 2 por el valor de la tercera componente de luego este vector pertenece a H y por tanto H es un subespacio vectorial.En el plano de ecuación no es subespacio vectorial, ya que el vector nulo (origen de coordenadas) no pertenece a dicho plano.En el paraboloide contiene el (0, 0, 0), pero no es subespacio vectorial, pues los puntos (1, 1, 2) y (−1,−1, 2) pertenecen a él, pero su suma no.
ObservacionesPara cualquier conjunto M, es un subespacio vectorial, ya que las combi-naciones lineales de vectores de son a su vez a combinaciones lineales de vectores de M, y pertenecen a el cual se denomina también subespacio generado por M. Cualquier subespacio que contenga a M contiene a En los únicos subespacios no triviales son las rectas que pasan por el origen, y en las rectas que pasan por el origen y los planos que lo contienen.
La parte de imagen con el identificador de relación rId12 no se encontró en el archivo.
15

ETSII-UPM
16
Bases y dimensión 1/6Definición de sistema generador
Dados H subespacio vectorial de y se dice que M es un sistemagenerador (o sistema de generadores) de H si es decir, si todo vector de H puede ponerse como combinación lineal de los de M.
EjemploLos vectores canónicos de constituyen un sistema generador de dicho espacio, ya que
Definición de baseDado H subespacio vectorial de una base de H es un sistema generador, libre y ordenado.
Definición de base canónicaEn la familia formada por los vectores canónicos que ya se ha visto que constituye un sistema libre y generador de es por tanto una base, que denominaremos base canónica de

ETSII-UPM
Bases y dimensión 2/6Ejemplo
Encontrar una base del subespacio de determinado por la ecuación
Solución: puesto que tenemos una única ecuación y cuatro incógnitas, podemos dar valores arbitrarios a tres de ellas y escribir la cuarta en función de esas tres, por ejemplo: es decir:
Los tres vectores anteriores engendran de manera evidente el subespacio y son linealmente independientes (véanse las tres últimas componentes), constituyendo por lo tanto una base del mismo.
Teorema de existencia de bases (sin demostración)Todo espacio vectorial admite una base.
Teorema de equicardinalidad de bases (sin demostración)Todas las bases de un mismo espacio vectorial tienen el mismo número de vectores. 17

ETSII-UPM
18
Bases y dimensión 3/6Definición de dimensión
Llamamos dimensión de un subespacio vectorial H, y la denotamos por al número de elementos de cualquiera de sus bases.Ejemplo: ya que la base canónica está formada por n vectores.
NotasAdoptamos el convenio de considerar al conjunto vacío, como la base del subespacio nulo Así pues, Con esta convención, la relación de Grassmann (que se verá más adelante) así como otros resultados de este curso siguen siendo válidos cuando alguno de los subespacios involucrados es el nulo.Recuérdese en todo caso que así como cualquier familia que lo contenga siempre es una familia ligada.

ETSII-UPM
19
Bases y dimensión 4/6Proposición
De todo sistema generador de un espacio vectorial H puede extraerse una base.Apunte constructivo
Sea G un generador finito de H. Si es libre el resultado está probado. Si es ligado, existe un vector que depende linealmente de los restantes vectores de G; por tanto, al suprimir ese vector, el conjunto resultante sigue engendrando el mismo subespacio H. Se repite el argumento y, dado que G es finito, en un número finito de pasos habremos extraído de G un generador libre.
ObservacionesLa construcción anterior muestra que una base es un sistema generador minimal, es decir, con el menor número posible de vectores. Así pues, la dimensión de un subespacio equivale al mínimo número de vectores para un sistema generador de dicho subespacio.Del mismo modo, en un subespacio de dimensión m no puede existir un sistema libre con un número de vectores superior a m, pues en tal caso se trataría de una base y la dimensión sería mayor que m. Así, una base se caracteriza por ser un sistema libre maximal, es decir, con el máximo número posible de vectores. La dimensión es el mayor número posible de vectores linealmente independientes.

ETSII-UPM
20
Bases y dimensión 5/6Proposición: Sea H un subespacio de cuya dimensión es m.
Si es una familia libre de H, entonces es sistema generador (y por tanto base) de H.Si es un sistema generador de H, entonces es libre (y por tanto base) de H.Si m = n, entonces
ObservaciónSi un subespacio H tiene dimensión k, el vector genérico de dicho espacio puede escribirse como
en donde es una base de H. La expresión anterior coincide con la de la solución general de un sistema de ecuaciones lineales homogéneas (las ecuaciones implícitas de H), que caracterizan a los vectores de H. Para encontrar dichas ecuaciones basta con eliminar los parámetros de la ecuación vectorial anterior o, equivalentemente, forzar a que el vector genérico
sea combinación lineal de los de la base de H (ver ejemplos posteriores).Para un subespacio H de el nº de ecuaciones implícitas independientes que lo determinan es Esto quedará demostrado en el Tema 2
ETSII-UPM
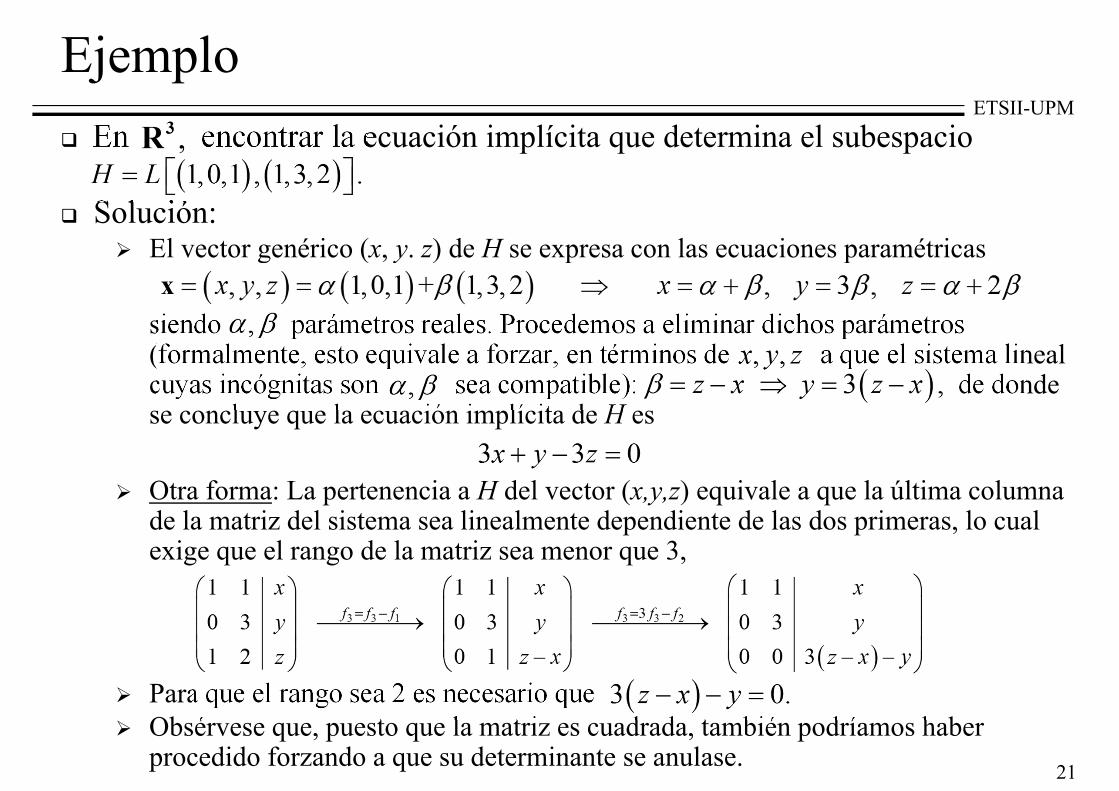
EjemploEn encontrar la ecuación implícita que determina el subespacio
Solución: El vector genérico (x, y. z) de H se expresa con las ecuaciones paramétricas
siendo parámetros reales. Procedemos a eliminar dichos parámetros (formalmente, esto equivale a forzar, en términos de a que el sistema lineal cuyas incógnitas son sea compatible): de donde se concluye que la ecuación implícita de H es
Otra forma: La pertenencia a H del vector (x,y,z) equivale a que la última columna de la matriz del sistema sea linealmente dependiente de las dos primeras, lo cual exige que el rango de la matriz sea menor que 3,
Para que el rango sea 2 es necesario que Obsérvese que, puesto que la matriz es cuadrada, también podríamos haber procedido forzando a que su determinante se anulase. 21
ETSII-UPM
22
Bases y dimensión 6/6Teorema de la base incompleta (o de compleción de la base)
Sea H un espacio vectorial de dimensión m, y sea una familia libre de H, con Entonces existen tales que
es una base de H.
Demostración constructiva: Puesto que todo sistema generador de H tiene al menos m elementos, el conjunto G no puede ser generador, luego existe algún vector que no es combinación lineal de los de G, es decir, El conjunto obtenido es un sistema libre de H, ya que no depende linealmente de los k primeros vectores que, a su vez, son linealmente independientes entre sí.Si ya tenemos una base de H, pues el conjunto es una familia libre de m vectores; en caso contrario, volvemos a aplicarle el mismo razonamiento a dicho conjunto (sea etc.); en pasos, habremos obtenido una familia libre de m vectores, es decir, una base de H.

ETSII-UPM
EjemploEncontrar una base de cuyos dos primeros vectores sean (1,2,3,4), (1,0,−1,0).Solución:
En lugar de proceder paso a paso como en la construcción teórica anterior, vamos a intentar encontrar los dos vectores directamente. Probamos con aquéllos que nos pueden facilitar los cálculos, es decir, los canónicos, por ejemplo (0,0,1,0), (0,0,0,1) y simplemente comprobamos si estos vectores completan la base. En efecto, la familia obtenida es libre ya que, con una simple operación de reducción gaussiana por filas,
de donde concluimos que las cuatro filas de la matriz son linealmente independientes. Así pues, una base que satisface las condiciones pedidas es
((1,2,3,4), (1,0,−1,0), (0,0,1,0), (0,0,0,1))Si los dos vectores escogidos nos hubiesen proporcionado una matriz de rango inferior a 4, escogeríamos otros distintos y repetiríamos la comprobación.
23

ETSII-UPM
24
Coordenadas respecto a una base 1/2Definición de coordenadas respecto a una base
Sea una base de Si con los escalares se denominan coordenadas del vector v
respecto a la base B.Nota
De igual modo pueden definirse las coordenadas respecto a una base de un subespacio de de cualquier vector perteneciente a dicho subespacio.
ProposiciónLas coordenadas de un vector respecto a una base son únicas.
DemostraciónSupongamos que un vector u puede expresarse como
Entonces,
que implica, por la independencia lineal de los que todos los escalares valen 0, es decir, que
Definición de vector de coordenadas El vector se denomina vector de coordenadas de vrespecto a B, y se suele denotar por

ETSII-UPM
25
Coordenadas respecto a una base 2/2Observación
Las coordenadas de un vector respecto a la base canónica de coinciden con las componentes del vector, es decir, el vector de coordenadas coincide con el propio vector.
EjemploCalcular las coordenadas del vector respecto a la base
Solución: Buscamos x, y, z tales que es decir, tenemos que resolver el sistema cuya matriz ampliada es
Realizamos operaciones de reducción gaussiana por filas, obteniendo:
que, despejando las incógnitas de abajo a arriba, daEl vector de coordenadas es, por tanto,

ETSII-UPM
26
Intersección y suma de subespacios 1/3Intersección de conjuntos A y B
Es el conjunto formado por los elementos que pertenecen a A y a B.Proposición
La intersección de subespacios vectoriales de es subespacio vectorial de dicho espacio.
DemostraciónSean M y N subespacios de contiene obviamente al vector nulo. Sean los vectores así pues, por ser estos conjuntos subespacios, para cualesquiera yes decir
ObservaciónLa unión de subespacios vectoriales no es, en general, subespacio vectorial. Considérense, por ejemplo, los dos ejes coordenados en que son subespacios. Tanto el vector como el vector pertenecen a la unión de dichos subespacios, pero su vector suma (1,1) no pertenece a dicha unión.De hecho, dados dos subespacios L, M de un mismo espacio vectorial E, se tiene que
ETSII-UPM
Intersección y suma de subespacios 2/3Definición de suma de subespacios
Dados dos subespacios L y M de definimos su suma como
En general, la definición anterior puede extenderse recursivamente a un número finito de subespacios de un mismo espacio.
EjemploEn se consideran los dos ejes coordenados y
La suma de dichos subespacios es el plano XOY , es decir,
Como resultado de la suma hemos obtenido un nuevo subespacio vectorial de Proposición
La suma de subespacios vectoriales de es un subespacio vectorial deDemostración
es no vacío ya que contiene a M y a N. Sean es decir, con Entonces,
ya que pertenece a M por ser combinación lineal de vectores de M, e igualmente le sucede al segundo sumando respecto a N. 27

ETSII-UPM
28
Intersección y suma de subespacios 3/3La unión de subespacios no es espacio vectorial
La suma de vectores pertenecientesa la unión, no pertenece a la unión.
La suma de subespacios sí es espacio vectorial
Por definición, la suma de subespacioscontiene al vector suma de dos vectorespertenecientes a los dos subespacios
La intersección de subespacios también es subespacio vectorial
Supóngase que Comose tiene que
Análogamente se demuestra que luego

ETSII-UPM
29
Suma directa de subespacios 1/2Definición de suma directa
Dados dos subespacios vectoriales de diremos que su suma es directa, y escribiremos si Nota: Para más de dos subespacios, se dice que su suma es directa si lo es la de cada subespacio con la suma de todos los demás.
Ejemplos en el espacio ordinario con ejes cartesianos X, Y y ZCualquier conjunto de dos de los tres ejes X, Y y Z, como X e Y, o X y Z.El plano X-Y y el eje Z. Cualquier plano que pase por el origen y cualquier recta que también pase por el origen y no esté contenida en dicho plano.Cualesquiera tres rectas que pasen por el origen y no estén contenidas en un mismo plano, o cualquier par de rectas no coincidentes que pasen por el origen.

ETSII-UPM
Suma directa de subespacios 2/2Proposición (caracterización de la suma directa)
Sean L y M subespacios vectoriales de la suma L+M es directa si y sólo si existen únicos tales que
Demostración (no exigible)Supongamos que se tiene es decir, y sea un vector
con Entonces es un vector de L según la expresión del primer miembro y de M como consecuencia de la del segundo, es decir, que pertenece a y es por tanto el vector nulo. Por consiguiente, y la descomposición de u es única.
Supongamos que todo vector de se descompone de manera única. Dado cualquier vector podemos escribirlo como pero también como siendo en ambos casos el primer sumando perteneciente a L y el segundo a M. La unicidad de la descomposición obliga a que sea y, consecuentemente,
30

ETSII-UPM
31
Subespacios suplementariosDefinición de subespacios suplementarios
Dos subespacios L y M de se dicen suplementarios si
ObservacionesDados dos subespacios suplementarios L y M, todo vector de se descompone de forma única como suma de un vector de L y otro de M.
Ejemplos en el plano y espacio ordinariosEn cualesquiera dos rectas distintas que pasen por el origen son suplementarias; en particular, para los dos ejes coordenados:
En cualquier plano que pase por el origen y cualquier recta que pase por el origen no contenida en dicho plano, son subespacios suplementarios.

ETSII-UPM
32
La relación de GrassmannObservación
Dados dos subespacios M1 y M2, de sistemas generadores respectivos G1 y G2, se tiene que G1 ∪ G2 es un sistema generador de M1 + M2; es decir, que la unión de los sistemas generadores es un sistema generador de la suma; en particular, la unión de las bases es un sistema generador (pero no necesariamente base) de la suma.
Proposición: Relación de Grassmann (demostración no exigible)Dados dos subespacios vectoriales L, M de se tiene que
ObservaciónPara cualesquiera subespacios L, M de intersección nula,
En particular, si L, M son dos subespacios suplementarios en entonces
EjemploEn los planos X-Y y X-Z tienen dimensión 2. Su intersección (eje X) tiene dimensión 1. La dimensión de su suma (que es ) es 3.

ETSII-UPM
Ejemplo 1 Encuéntrese una base de un suplementario en R4 del subespacio
Solución:La dimensión del suplementario ha de ser 4 − 2 = 2. Si completamos la base de M hasta una de R4, los vectores añadidos constituirán una base de un subespacio N tal que M + N = R4, pero también
luego la suma M + N será directa, por lo que N será un suplementario de M. Así pues, basta completar la base dada hasta una de R4. Probamos, por ejemplo, con los dos últimos vectores canónicos:
La forma escalonada de la matriz obtenida nos garantiza que la familia es libre, luego un suplementario de M en R4 es
33

ETSII-UPM
Ejemplo 2, 1/3En se consideran los subespacios M definido mediante las ecuacionesy Encuéntrense sendas bases de los subespacios así como unas ecuaciones implícitas de los mismos.Solución
Calcularemos primero una base de El vector genérico de N es
Para que pertenezca simultáneamente a M, le imponemos las ecuaciones de M:
Así pues, los vectores de dependen de un único parámetro (es decir, ), siendo estos vectores de la forma
y, por tanto, una base de es Ahora, por la relación de Grassmann, se sabe que
34
ETSII-UPM
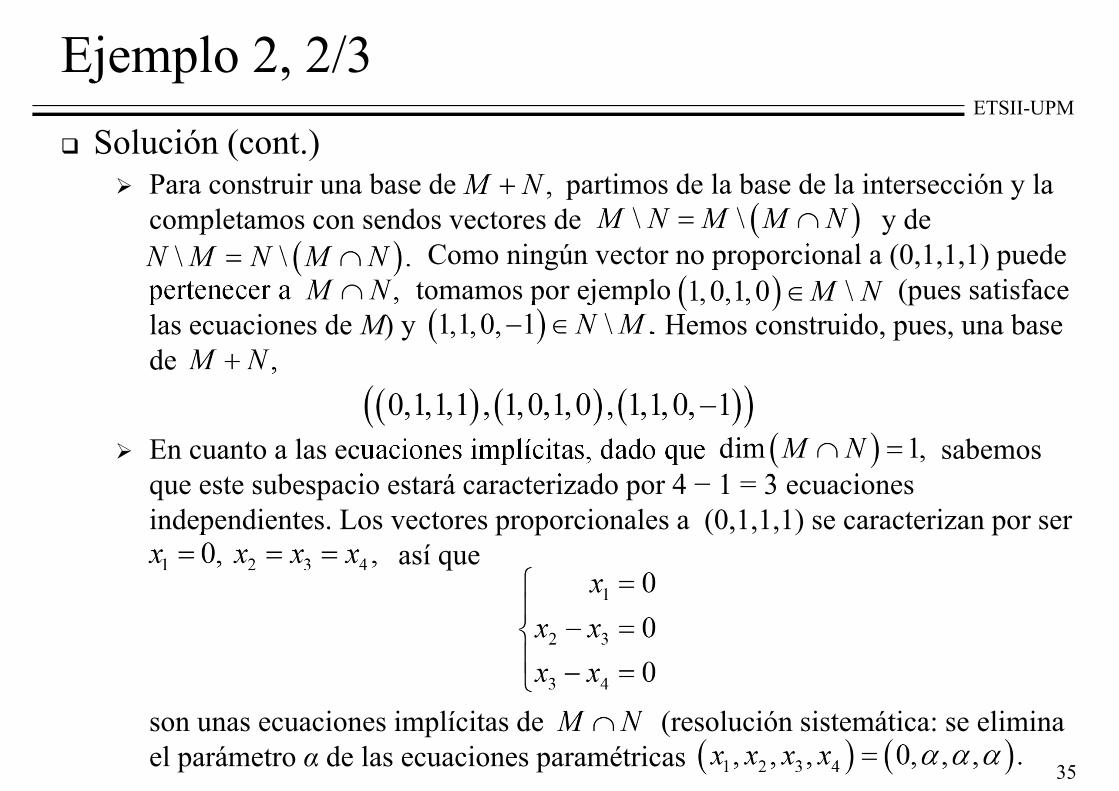
Ejemplo 2, 2/3Solución (cont.)
Para construir una base de partimos de la base de la intersección y la completamos con sendos vectores de y de
Como ningún vector no proporcional a (0,1,1,1) puede pertenecer a tomamos por ejemplo (pues satisface las ecuaciones de M) y . Hemos construido, pues, una base de
En cuanto a las ecuaciones implícitas, dado que sabemos que este subespacio estará caracterizado por 4 − 1 = 3 ecuaciones independientes. Los vectores proporcionales a (0,1,1,1) se caracterizan por ser
así que
son unas ecuaciones implícitas de (resolución sistemática: se elimina el parámetro α de las ecuaciones paramétricas 35

ETSII-UPM
Ejemplo 2, 3/3Solución (cont.)
Respecto a como su dimensión vale 3, está caracterizado por 4−3 = 1 ecuación. Para calcularla, obligamos a que el vector sea combinación lineal de los de la base del subespacio, por ejemplo escribiendo
Se ha alterado el orden de los vectores de la base por comodidad en los cálculos. y obligando a que el sistema lineal cuya matriz ampliada es la ya vista sea compatible. Realizando operaciones de reducción gaussiana por filas,
de modo que el sistema será compatible siempre que y ésta es la ecuación implícita de Nótese que, puesto que la matriz es cuadrada, se obtiene el mismo resultado imponiendo que el determinante sea igual a 0.
36