energÍas y combustibles para el futuro - …€¦ · · 2013-10-10energÍas y combustibles para...
TRANSCRIPT
---------- PROGRAMA ----------
MASTER:
ENERGÍAS Y COMBUSTIBLES PARA EL FUTURO
CURSO:
SIMULACIÓN COMPUTACIONAL Y AUTOMATIZACIÓN DE SISTEMAS
PARTE 2ª: AUTOMATIZACIÓN DE SISTEMAS Profesores: JULIO BODEGA JOSÉ GORJÓN
CLASES TEÓRICAS Martes 16 de noviembre de 2010 Prof.: Julio Bodega Hora: 12:00 a 14:00 Aula: Sala Seminarios, Módulo 4. Temario: 1 INTRODUCCIÓN A LOS SISTEMAS DE CONTROL
1.1 Conceptos 1.2 Clasificación 1.3 Control en lazo ABIERTO y en lazo CERRADO
2 LA TRANSFORMADA DE LAPLACE
2.1 Concepto 2.2 Transformadas de algunas funciones relevantes
3 DESCRIPCIÓN ANALÍTICA DE LOS SISTEMAS DE REGULACIÓN Y
CONTROL
3.1 Diagrama estructural 3.2 Función de Transferencia 3.3 Diagrama de Bloques
4 EJEMPLOS DE MODELIZADO DE SISTEMAS
4.1 Sistema mecánico 4.2 Sistema eléctrico
5 ANÁLISIS DE LOS SISTEMAS DE REGULACIÓN Y CONTROL
5.1 Análisis en el dominio del tiempo
5.1.1 Respuesta a las señales normalizadas 5.1.1.1 Respuesta impulsional 5.1.1.2 Respuesta al escalón unitario 5.1.1.3 Respuesta a la rampa unitaria
5.1.2 Estabilidad de los sistemas 5.1.3 Sistemas de 1er orden 5.1.4 Sistemas de 2º orden 5.1.5 Sistemas de orden superior 5.1.6 Análisis de la respuesta en régimen permanente: análisis del error
5.2 Acciones básicas de control
5.2.1 Acción Proporcional 5.2.2 Acción Integral 5.2.3 Acción Derivativa
Miércoles 17 de noviembre de 2010 Prof.: José Gorjón Hora: 12:00 a 14:00 Aula: Sala Seminarios, Módulo 4. Temario:
5.3 Análisis en el dominio de la frecuencia 5.3.1 Respuesta en frecuencia - Formas de representación. 5.3.2 Criterio de Nyquist - Gráficas de Nyquist. 5.3.3 Estabilidad - Márgenes de fase y ganancia. 5.3.4 Criterio de Bode - Gráficas de Bode.
• Introducción a Matlab Jueves 18 de noviembre de 2010 Prof.: José Gorjón Hora: 12:00 a 14:00 Aula: Sala Seminarios, Módulo 4.
Temario: 6 SISTEMAS MUESTREADOS
6.1 Introducción: Sistemas en tiempo discreto y sistemas muestreados 6.2 Diagrama de bloques de un sistema de control digital. 6.3 Muestreo y reconstrucción 6.4 Problemática del muestreo. Aliasing 6.5 Teorema de muestreo (Shannon) 6.6 Transformada Z 6.7 Discretización de sistemas continuos.
• Introducción a Simulink Viernes 19 de noviembre de 2010
Visita al CIEMAT (visita a los laboratorios dedicados al ensayo y análisis de dispositivos solares). Profesor acompañante: Julio Bodega Hora: 10:00 a 13:00. Dirección: Laboratorio del Fotovoltaica del CIEMAT. Avd. Complutense 22,
(28040) MADRID. Punto de encuentro: Puerta del CIEMAT. NOTA IMPORTANTE: El día 16 de noviembre, los alumnos que deseen realizar esta
visita deben entregar a Julio Bodega una nota en la que hagan constar su nombre y D.N.I.
CLASES PRÁCTICAS Lunes 22, martes 23 y miércoles 24 de noviembre de 2010 Prof.: José Gorjón y Julio Bodega Hora: 12:00 a 14:00 Aula: 203, Mód. 11. Temario:
• Nociones básicas del manejo del software MATLAB (SIMULINK). • Análisis de sistemas de control en el dominio del tiempo y la frecuencia con
MATLAB. Jueves 25 de noviembre de 2010 Prof.: José Gorjón y Julio Bodega Hora: 12:00 a 14:00 Aula: CI-3 Temario:
• Nociones básicas del manejo del software MATLAB (SIMULINK). • Análisis de sistemas de control en el dominio del tiempo y la frecuencia con
MATLAB. Viernes 26 de noviembre de 2010 Visita al IES VIRGEN DE LA PALOMA (Demostración de medidas V-I de un entrenador de placas fotovoltaicas desarrollado por profesores del IES). Profesor acompañante: Julio Bodega y José Gorjón. Hora: 10:00 a 12:00. Dirección: Francos Rodríguez 106, (28049) MADRID. Punto de encuentro: Puerta del IES VIRGEN DE LA PALOMA.

BIBLIOGRAFÍA Ogata, Katsuhiko., Ingeniería de Control Moderna, Ed. Prentice-Hall Hispanoamericana, S. A., (1993). Andres Puente, E., Regulación Automática I, Ed. Sección de Publicaciones ETSIIM, (1993).
AUTOMATIZACIÓN DE SISTEMAS
Noviembre, 2010
master universitario en energías y combustibles para el futuro
Julio Bodega
José Gorjón
ÍNDICE
1 Introducción a los sistemas de regulación y control
1.1 Conceptos1.2 Clasificación1.3 Control en Lazo Abierto y Lazo Cerrado
2 La transformada de Laplace
2.1 Concepto2.1 Transformadas de algunas funciones relevantes
3 Descripción analítica de los sistemas de regulación ycontrol
3.1 Diagrama estructural3.2 Función de Transferencia3.3 Diagrama de bloques
ÍNDICE
4 Ejemplos de modelizado de sistemas
4.1 Sistema mecánico4.2 Sistema eléctrico
5 Análisis de los sistemas de regulación y control
5.1 Análisis en el dominio del tiempo
5.1.1 Respuesta a las señales normalizadas5.1.2 Estabilidad de los sistemas5.1.3 Sistemas de 1er orden5.1.4 Sistemas de 2º orden5.1.5 Sistemas de orden superior5.1.6 Análisis de la respuesta en régimen permanente: análisis del error
5.2 Acciones básicas de control
5.2.1 Acción proporcional5.2.2 Acción integral5.2.3 Acción derivativa
1. Introducción a los sistemas de control
Se entiende por TEORÍA DE LA REGULACIÓN AUTOMÁTICA (o TEORÍA DE CONTROL -en países anglosajones-) aquella disciplina que estudia el comportamiento dinámico de un determinado sistema físico frente a órdenes de mando o perturbaciones.
Se entiende por SISTEMA a una agrupación de componentes (elementos físicos en nuestro caso) que actuando de forma conjunta cumplen un objetivo de control sobre una determinada variable.
1.1 conceptos
1. Introducción a los sistemas de control
Se entiende por SISTEMA DE REGULACIÓN aquel en el que la entrada (señal de referencia) o la salida (señal controlada) son, o bien constantes, o bien varían lentamente en el tiempo, siendo su tarea fundamental mantener la variable de salida en un valor deseado, a pesar de las perturbaciones presentes.
Ejemplos:• Control de temperatura de un quirófano.• Control de velocidad de un aerogenerador.• Control de presión en un gaseoducto.• Control del nivel de un depósito de agua.
1.1 conceptos
1. Introducción a los sistemas de control
Se entiende por SERVOSISTEMA aquel cuya salida (generalmente, posición, velocidad o aceleración) debe seguir con exactitud un valor de consigna (entrada) que varía en el tiempo.
Ejemplos:• Control de posición de un aerogenerador.• Control de posición de un panel solar.• Control de máquinas-herramientas.• Control de robots.• Control de aterrizaje de una aeronave.• Control del seguimiento de un blanco.
1.1 conceptos
1. Introducción a los sistemas de control
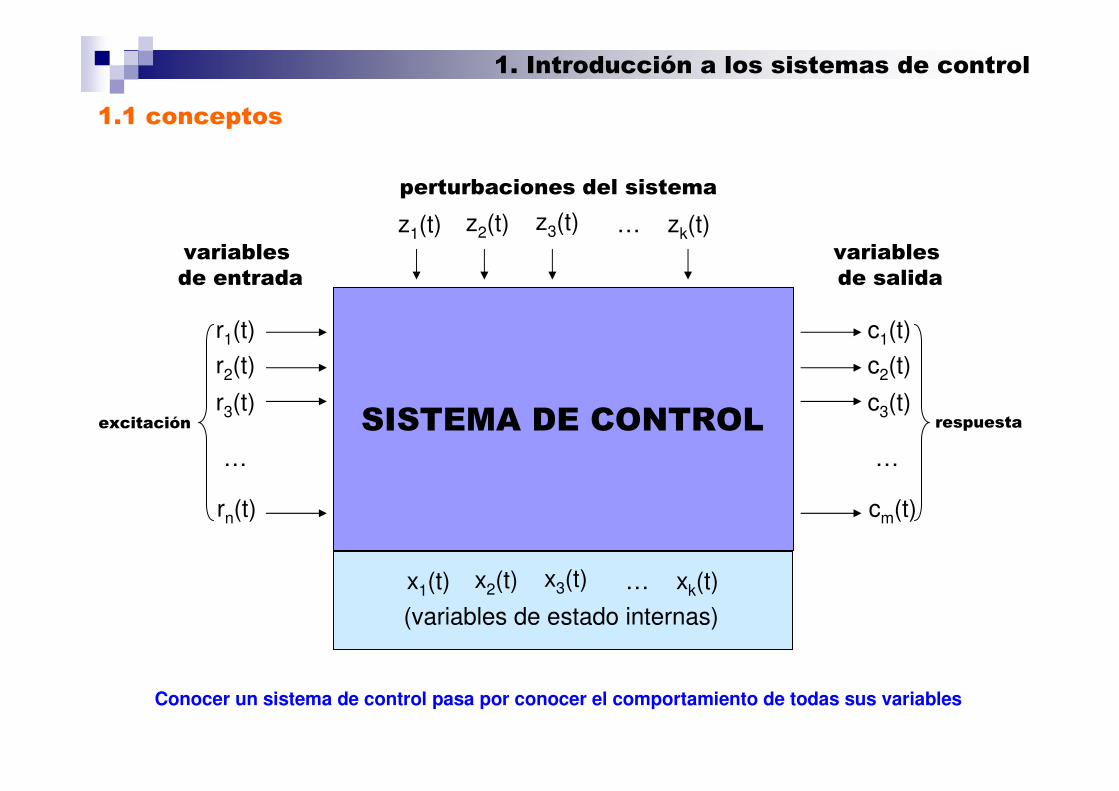
r1(t)
r3(t)
r2(t)
rn(t)
…
c1(t)
c3(t)
c2(t)
cm(t)
…
SISTEMA DE CONTROL
z1(t) z3(t)z2(t) zk(t)…
x1(t) x3(t)x2(t) xk(t)…
(variables de estado internas)
variables de entrada
variables de salida
perturbaciones del sistema
excitación respuesta
1.1 conceptos
Conocer un sistema de control pasa por conocer el comportamiento de todas sus variables
1. Introducción a los sistemas de control
1.1 conceptos
ESTABILIDAD
PRECISIÓN
La estabilidad es una cualidad que han de poseer todos los sistemas de regulación y control. Representa la capacidad que tiene el sistema para mantener su salida dentro de unos determinados límites.
Cuando un sistema es inestable, la salida puede adquirir valores inadmisibles, llegando incluso a dañar al sistema.
La precisión del sistema es la cualidad que representa la exactitud del valor de la variable de salida en referencia al valor impuesto a la entrada.
En el diseño de los sistemas de regulación y control hay que mantener un compromiso entre estas dos características.
1. Introducción a los sistemas de control
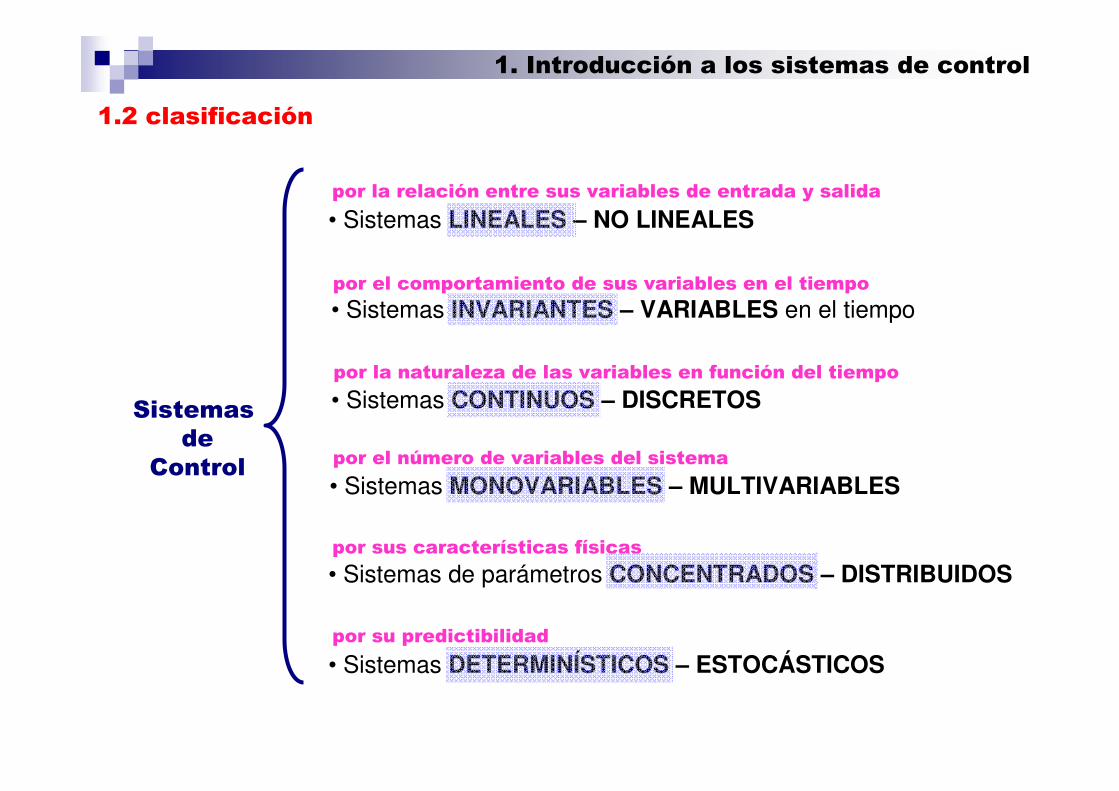
Sistemas de
Control
• Sistemas LINEALES – NO LINEALES
• Sistemas INVARIANTES – VARIABLES en el tiempo
• Sistemas CONTINUOS – DISCRETOS
• Sistemas MONOVARIABLES – MULTIVARIABLES
• Sistemas de parámetros CONCENTRADOS – DISTRIBUIDOS
• Sistemas DETERMINÍSTICOS – ESTOCÁSTICOS
por la relación entre sus variables de entrada y salida
por el comportamiento de sus variables en el tiempo
por la naturaleza de las variables en función del tiempo
por el número de variables del sistema
por sus características físicas
por su predictibilidad
1.2 clasificación
1. Introducción a los sistemas de control
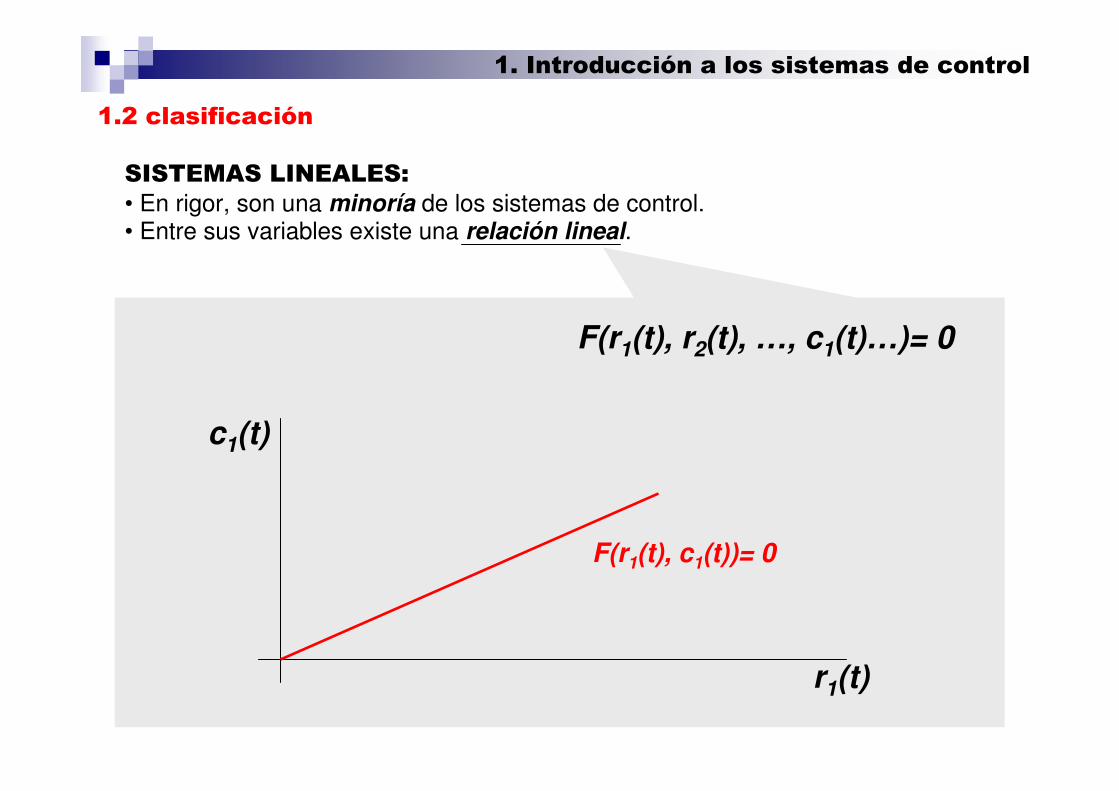
SISTEMAS LINEALES: • En rigor, son una minoría de los sistemas de control.• Entre sus variables existe una relación lineal.
F(r1(t), r2(t), …, c1(t)…)= 0
r1(t)
c1(t)
F(r1(t), c1(t))= 0
1.2 clasificación
1. Introducción a los sistemas de control
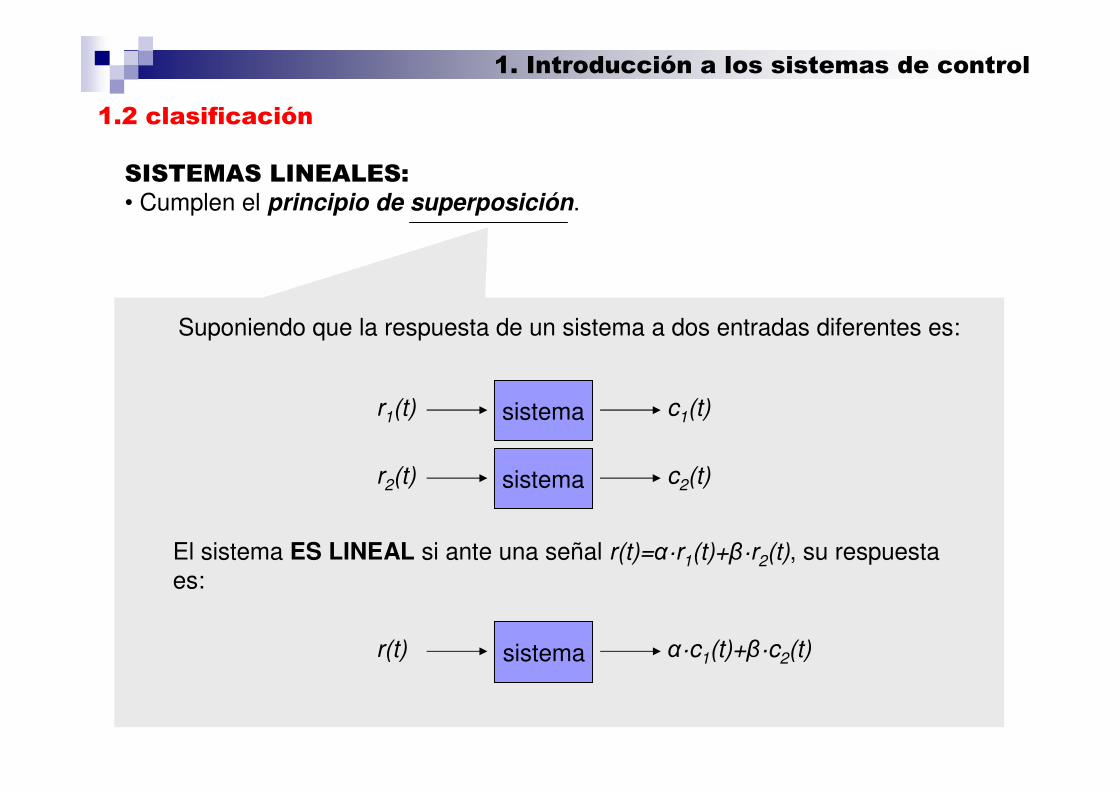
SISTEMAS LINEALES: • Cumplen el principio de superposición.
Suponiendo que la respuesta de un sistema a dos entradas diferentes es:
r1(t) c1(t)sistema
r2(t) c2(t)sistema
El sistema ES LINEAL si ante una señal r(t)=α·r1(t)+β·r2(t), su respuestaes:
sistemar(t) α·c1(t)+β·c2(t)
1.2 clasificación
1. Introducción a los sistemas de control
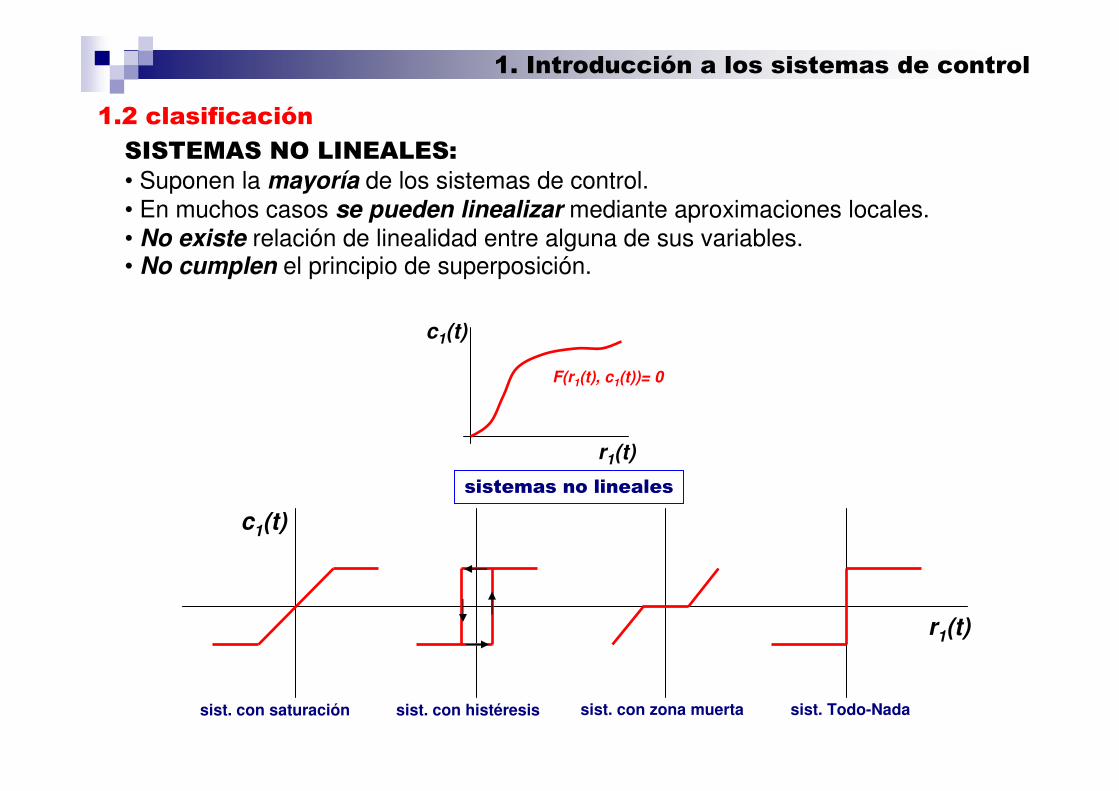
SISTEMAS NO LINEALES: • Suponen la mayoría de los sistemas de control.• En muchos casos se pueden linealizar mediante aproximaciones locales.• No existe relación de linealidad entre alguna de sus variables.• No cumplen el principio de superposición.
r1(t)
c1(t)
F(r1(t), c1(t))= 0
r1(t)
c1(t)
sistemas no lineales
sist. con saturación sist. con histéresis sist. con zona muerta sist. Todo-Nada
1.2 clasificación
1. Introducción a los sistemas de control
SISTEMAS INVARIANTES EN EL TIEMPO:
• Se denominan también SISTEMAS DE CONTROL DE COEFICIENTESCONSTANTES.
• Sus parámetros no varían en el tiempo.• La respuesta de estos sistemas es independiente del tiempo o momento
en el que se aplique la entrada.• Ejemplos:
- Sistemas en los que el parámetrose la constante k de un muelle. - Sistemas de control electrónicos cuyos parámetros sean el coeficiente
de autoinducción L de una bobina, la capacidad de un condensador Co la resistencia eléctrica R.
SISTEMAS VARIABLES EN EL TIEMPO:
• Alguno de sus parámetros varía en el tiempo.• La respuesta de estos sistemas es dependiente del momento en el que se
aplique la entrada.• Ejemplos:
- Control de velocidad en un vehículo espacial en el que un parámetrosea la masa de combustible.
1.2 clasificación
1. Introducción a los sistemas de control
SISTEMAS CONTINUOS:
• Se denominan así, aquellos sistemas en los que todas sus variablespueden expresarse en función de un tiempo continuo t.
• Ejemplos:- El control de temperatura de un tanque de agua.- El control de presión de una tubería de gas.- El control de velocidad de un motor de corriente continua.
SISTEMAS DISCRETOS:
• Se denominan así aquellos sistemas en los que alguna o todas susvariables son conocidas en instantes discretos de tiempo.
• Ejemplos:- Control de un marcapasos.- Control por muestreo de procesos industriales, en los que las medidasde las variables que intervienen se realizan de forma discreta en eltiempo.
1.2 clasificación
1. Introducción a los sistemas de control
SISTEMAS MONOVARIABLES:
• Se denominan así, aquellos sistemas en los que sólo existe una señalde entrada y una señal de salida.
• Ejemplos:- El control de temperatura de una habitación en la que la única señal
de entrada es la consigna de la temperatura, y la única señal desalida es la temperatura deseada.
SISTEMAS MULTIVARIABLES:
• Se denominan así aquellos sistemas en los que existe más de unaentrada o salida.
• Ejemplos:- Control de una mezcladora de pinturas en la que con la proporción
de diferentes colores (cada color corresponde a una entrada), seconsigue un determinado color mezcla (única salida).
1.2 clasificación
1. Introducción a los sistemas de control
SISTEMAS DE PARÁMETROS CONCENTRADOS:
• En ellos no es necesario considerar la distribución espacial de susparámetros.
• Pueden describirse mediante ecuaciones diferenciales ordinarias.• Ejemplos:
- Sistemas en los que la masa puede considerarse concentrada en elcentro de gravedad.
SISTEMAS DE PARÁMETROS DISTRIBUIDOS:
• Se denominan así a los sistemas de control en los que es necesarioconsiderar la distribución espacial de sus parámetros.
• Su comportamiento ha de ser descrito mediante ecuacionesdiferenciales en derivadas parciales.
• Ejemplos:- Sistemas de control en los que existen anisotropías respecto de
alguno de sus parámetros.
1.2 clasificación
1. Introducción a los sistemas de control
SISTEMAS DETERMINÍSTICOS:
• Un sistema se denomina determinístico si la respuesta a unadeterminada entrada es predecible y repetible.
• Para una única entrada r(t) sólo existe una salida c(t).• Para el estudio de estos sistemas se dispone de modelos explícitos.• Ejemplo:
- Sistema de amplificación de ganancia constante.
SISTEMAS ESTOCÁSTICOS:
• Un sistema se denomina estocástico cuando ni es predecible nirepetible.
• Para una única entrada r(t) pueden existir diferentes valores desalida c(t), cada uno de ellos con distinta probabilidad.
• El conocimiento de estos sistemas requiere estudios estadísticos.• Ejemplo:
- Sistemas biológicos.
1.2 clasificación
1.3 control en Lazo Abierto y Lazo Cerrado
1. Introducción a los sistemas de control
CONTROL EN LAZO ABIERTO
• La salida NO tiene ningún efecto sobre la acción de control, nise mide ni se retroalimenta.
SISTEMAS NO RETROALIMENTADOS
• Para cada valor de consigna corresponde una condición deoperación fija.
• La precisión del sistema depende de la calibración.
• En presencia de perturbaciones el sistema no cumple sufunción asignada.
• Funcionan sobre una base de tiempos: lavavajillas, lavadora,control de semáforos, etc.
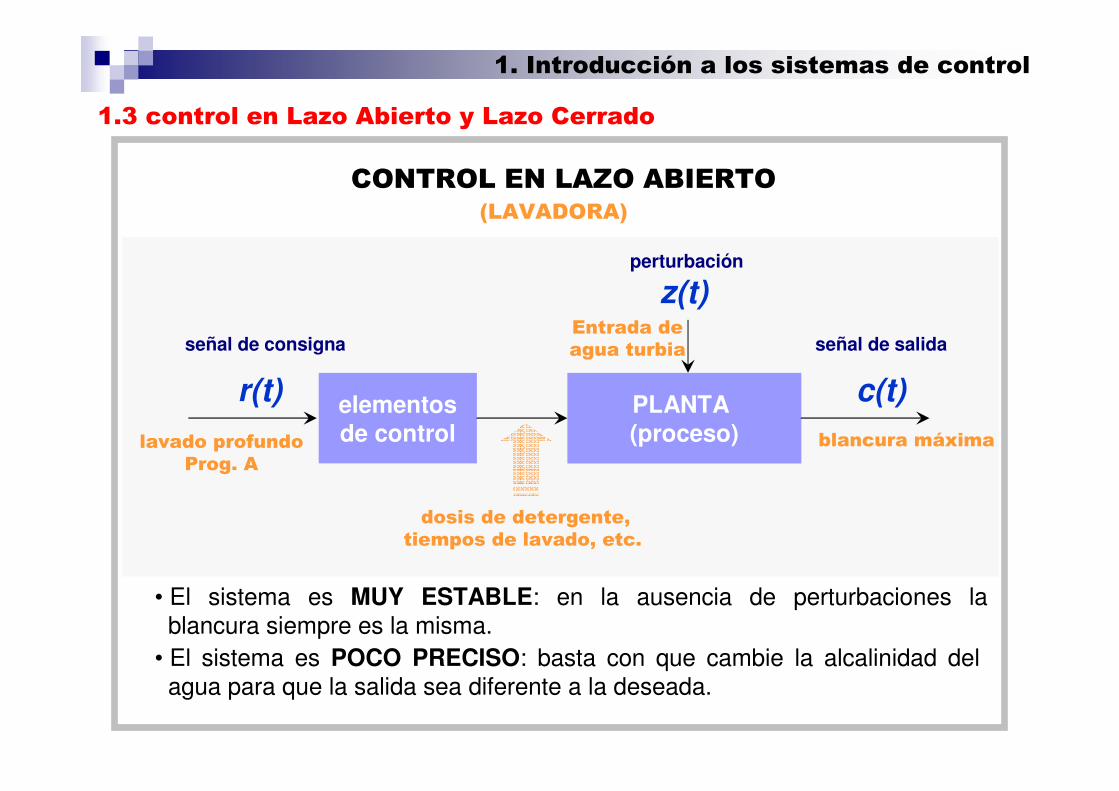
CONTROL EN LAZO ABIERTO
elementosde control
PLANTA (proceso)
r(t) c(t)
señal de consigna señal de salida
z(t)perturbación
(LAVADORA)
lavado profundoProg. A
blancura máxima
Entrada deagua turbia
dosis de detergente,tiempos de lavado, etc.
• El sistema es MUY ESTABLE: en la ausencia de perturbaciones lablancura siempre es la misma.
• El sistema es POCO PRECISO: basta con que cambie la alcalinidad delagua para que la salida sea diferente a la deseada.
1.3 control en Lazo Abierto y Lazo Cerrado
1. Introducción a los sistemas de control
CONTROL EN LAZO CERRADO
• La salida SI tiene efecto sobre la acción de control, por lo tanto,se mide y se retroalimenta.
SISTEMAS RETROALIMENTADOS
• Para cada valor de consigna no corresponde una condición deoperación fija sino que dependerá de las perturbaciones y delvalor de la salida.
• En presencia de perturbaciones el sistema cumple sufunción asignada.
• Funcionan sobre la base de mantener la máxima precisión, esdecir, el mínimo error. El sistema lee constantemente la señalde salida, la compara con la de entrada (consigna) y,dependiendo del valor de esta comparación, actúa para corregirlas desviaciones.
1.3 control en Lazo Abierto y Lazo Cerrado
1. Introducción a los sistemas de control
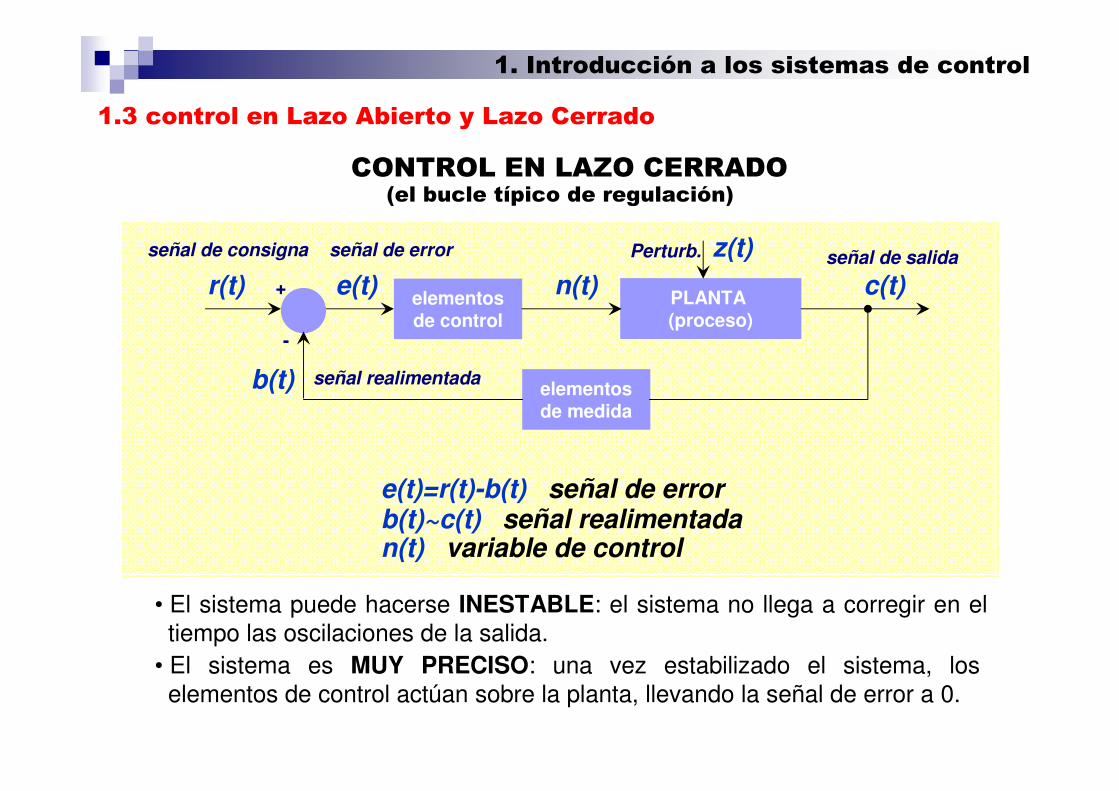
CONTROL EN LAZO CERRADO
elementosde control
PLANTA (proceso)
r(t) c(t)señal de consigna señal de salidaz(t)Perturb.
• El sistema puede hacerse INESTABLE: el sistema no llega a corregir en eltiempo las oscilaciones de la salida.
• El sistema es MUY PRECISO: una vez estabilizado el sistema, loselementos de control actúan sobre la planta, llevando la señal de error a 0.
e(t)
elementosde medida
+
-
b(t)
señal de error
señal realimentada
e(t)=r(t)-b(t) señal de errorb(t)~c(t) señal realimentada
n(t)
n(t) variable de control
(el bucle típico de regulación)
1.3 control en Lazo Abierto y Lazo Cerrado
1. Introducción a los sistemas de control
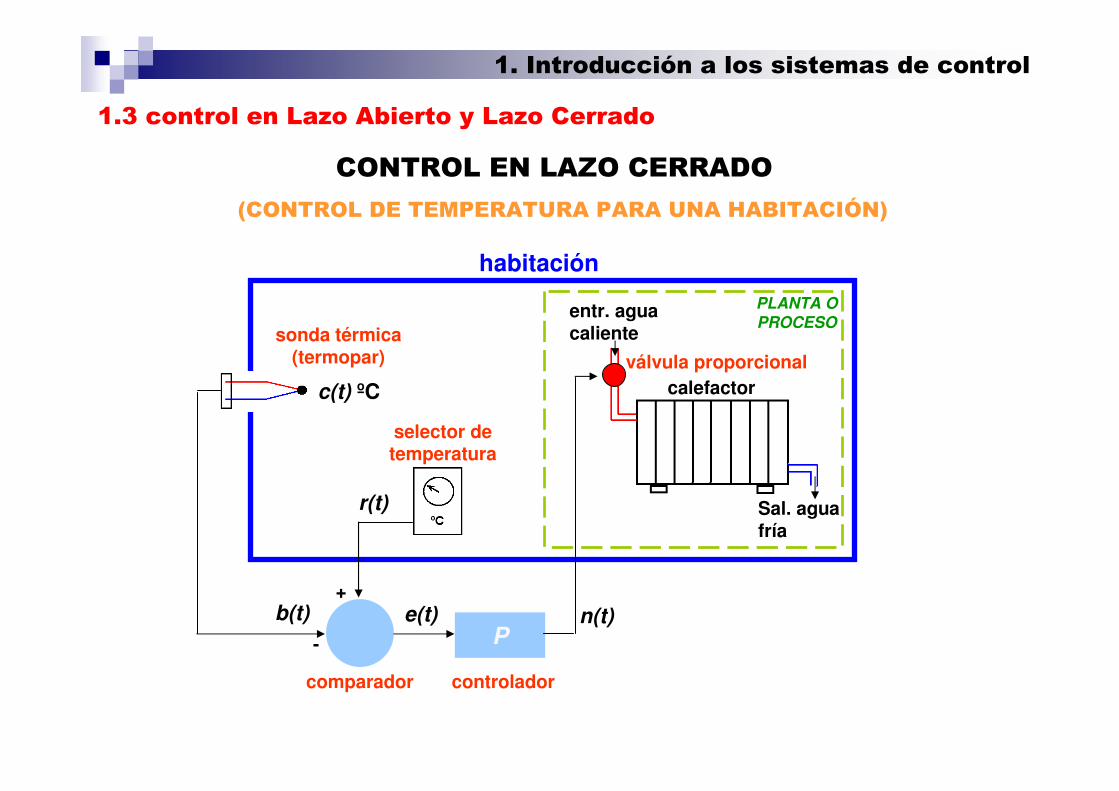
CONTROL EN LAZO CERRADO
(CONTROL DE TEMPERATURA PARA UNA HABITACIÓN)
habitación
calefactor
entr. agua caliente
Sal. agua fría
válvula proporcional
sonda térmica(termopar)
selector de temperatura
-
+
comparador
c(t) ºC
r(t)
b(t)P
controlador
e(t)
PLANTA O PROCESO
n(t)
1.3 control en Lazo Abierto y Lazo Cerrado
1. Introducción a los sistemas de control
2. La Transformada de Laplace
2.1 concepto
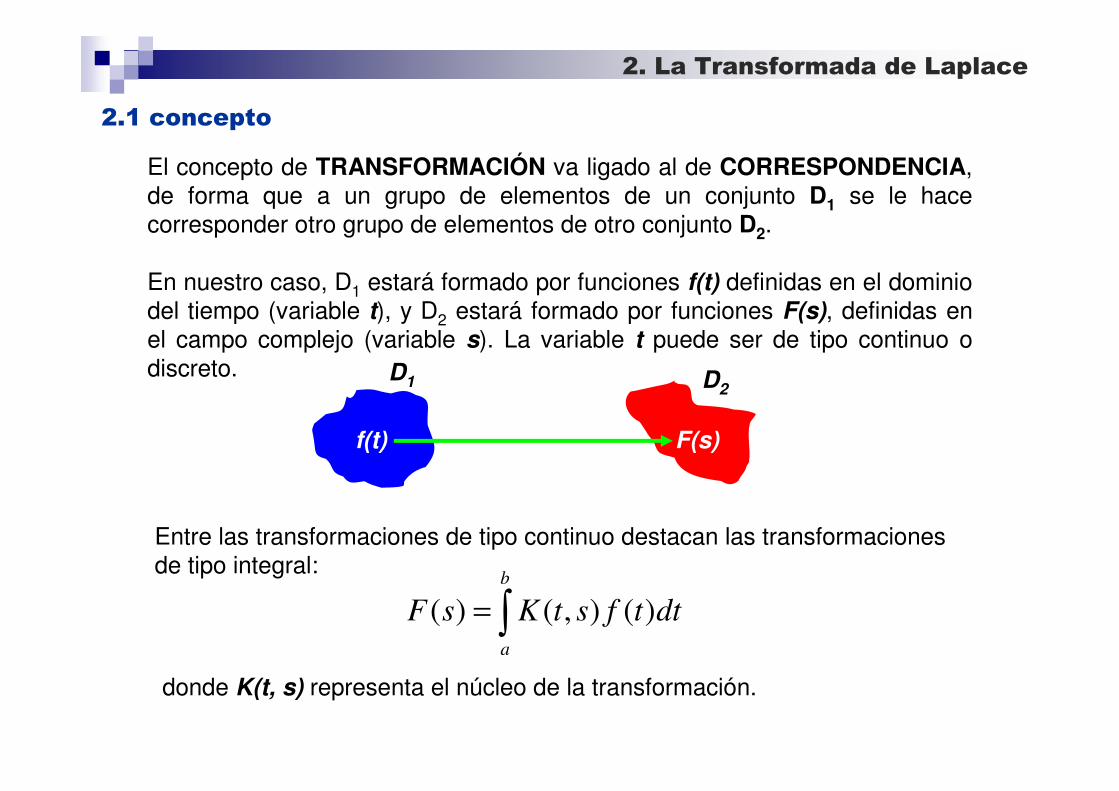
El concepto de TRANSFORMACIÓN va ligado al de CORRESPONDENCIA, de forma que a un grupo de elementos de un conjunto D1 se le hace corresponder otro grupo de elementos de otro conjunto D2.
En nuestro caso, D1 estará formado por funciones f(t) definidas en el dominio del tiempo (variable t), y D2 estará formado por funciones F(s), definidas en el campo complejo (variable s). La variable t puede ser de tipo continuo o discreto.
f(t) F(s)
D1 D2
Entre las transformaciones de tipo continuo destacan las transformaciones de tipo integral:
∫=b
a
dttfstKsF )(),()(
donde K(t, s) representa el núcleo de la transformación.
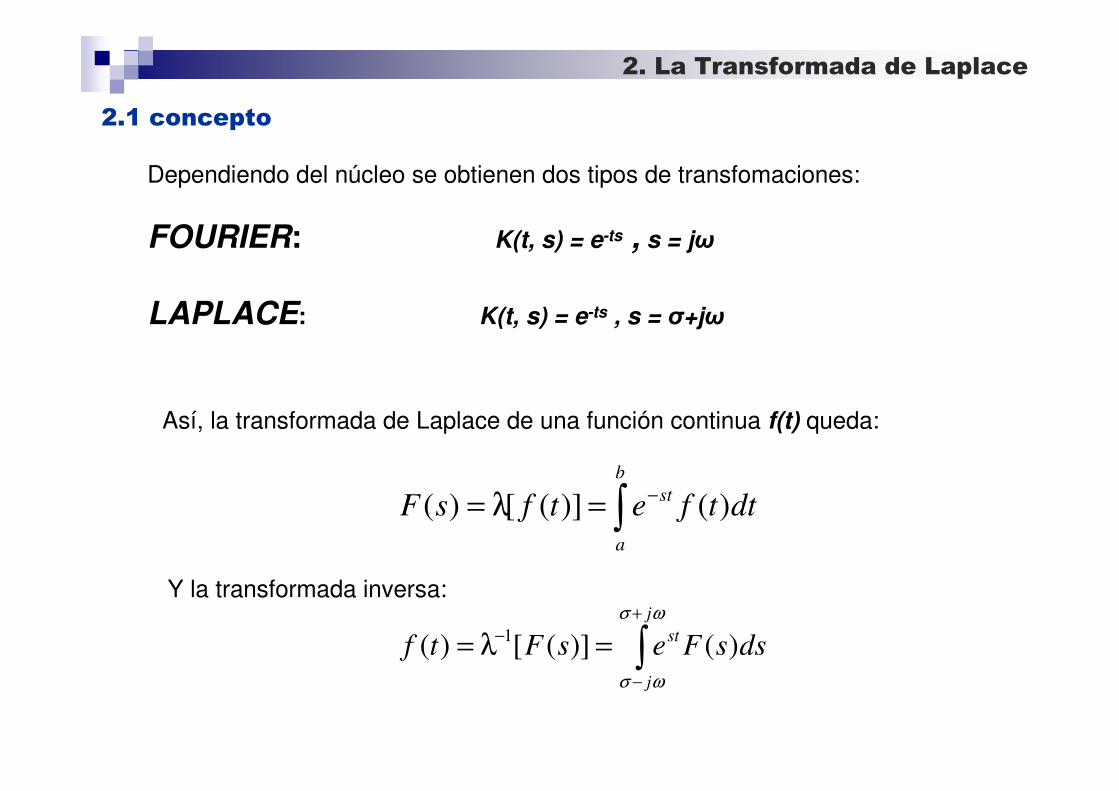
Dependiendo del núcleo se obtienen dos tipos de transfomaciones:
FOURIER: K(t, s) = e-ts , s = jω
LAPLACE: K(t, s) = e-ts , s = σ+jω
Así, la transformada de Laplace de una función continua f(t) queda:
∫−==
b
a
stdttfetfsF )()]([)( λ
Y la transformada inversa:
∫+
−
− ==ωσ
ωσ
j
j
stdssFesFtf )()]([)( 1λ
2. La Transformada de Laplace
2.1 concepto
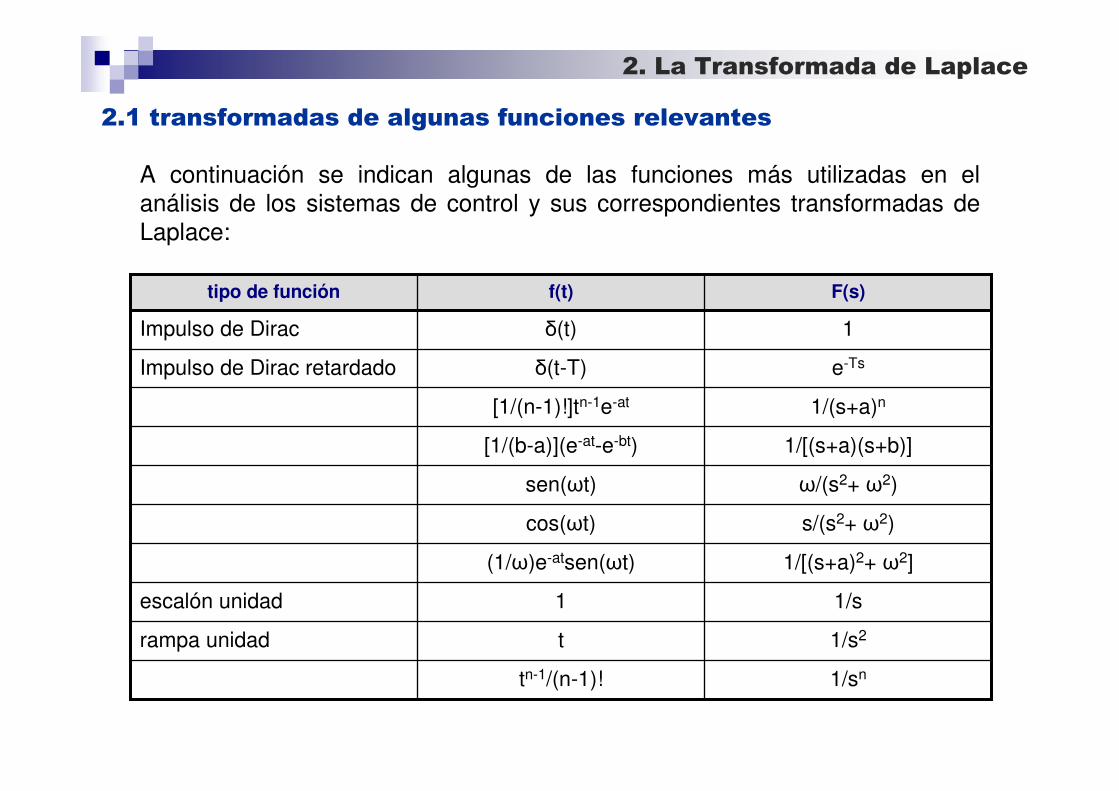
A continuación se indican algunas de las funciones más utilizadas en el análisis de los sistemas de control y sus correspondientes transformadas de Laplace:
1/[(s+a)2+ ω2](1/ω)e-atsen(ωt)
1/s1escalón unidad
e-Tsδ(t-T)Impulso de Dirac retardado
1/(s+a)n[1/(n-1)!]tn-1e-at
1/[(s+a)(s+b)][1/(b-a)](e-at-e-bt)
ω/(s2+ ω2)sen(ωt)
s/(s2+ ω2)cos(ωt)
1/s2trampa unidad
1δ(t)Impulso de Dirac
1/sntn-1/(n-1)!
F(s)f(t)tipo de función
2. La Transformada de Laplace
2.1 transformadas de algunas funciones relevantes
3. Descripción analítica de los sist. de regul. y control
3.1 diagrama estructural
• Un conocimiento riguroso de los fenómenos físicos que se desarrollan endicho sistema.
• La descripción exacta de sus componentes.• La subdivisión del sistema en bloques funcionales o subsistemas que
faciliten su estudio.• La modelización de cada uno de los mencionados bloques mediante
expresiones matemáticas que describan su comportamiento dinámico.
(la salida de cada subsistema o bloque depende exclusivamente de la entrada al mismo, sin verse afectada de la acción de los bloque que le sigan)
El DIAGRAMA ESTRUCTURAL de un sistema de regulación y control consiste en una parcelación del sistema en subsistemas de comportamiento autónomo.
Elaborar el diagrama estructural de un sistema conlleva:
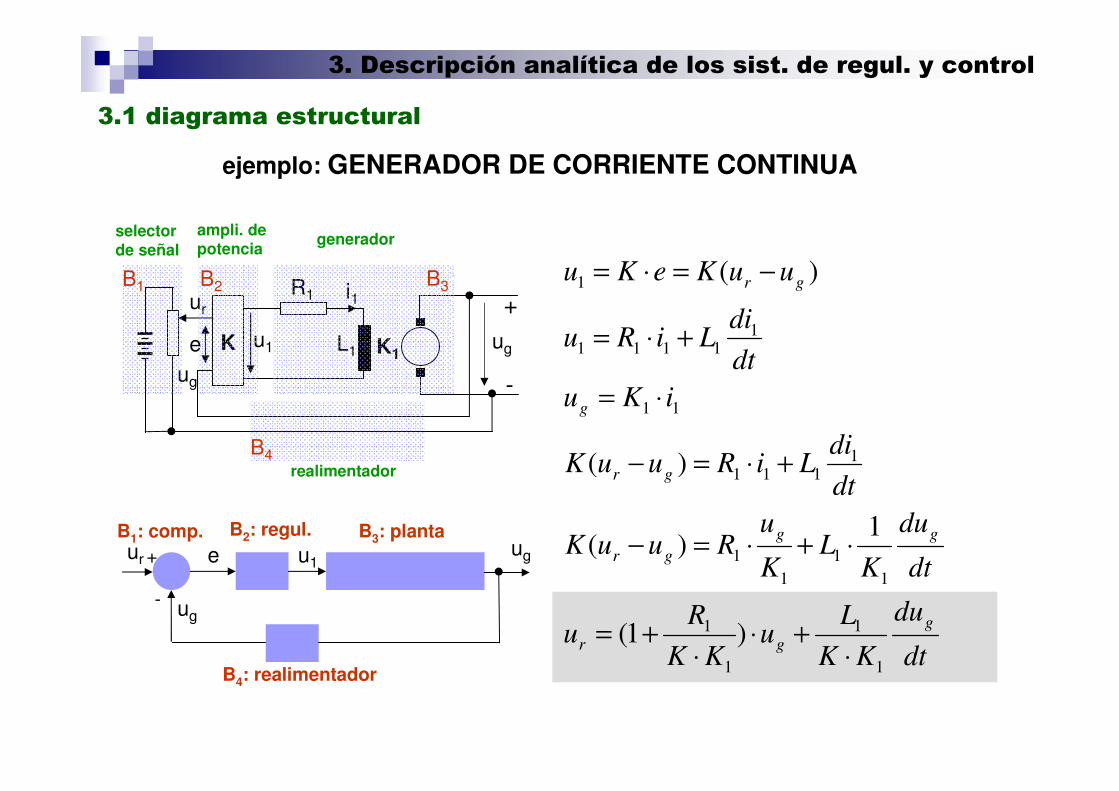
ejemplo: GENERADOR DE CORRIENTE CONTINUA
urug
ug
e u1+
-
B1: comp. B2: regul. B3: planta
B4: realimentador
+
-
ug
ur
ug
e K u1
R1
L1
i1
K1
B1 B2 B3
B4
selectorde señal
ampli. depotencia
generador
realimentador
dt
du
KK
Lu
KK
Ru
dt
du
KL
K
uRuuK
dt
diLiRuuK
iKu
dt
diLiRu
uuKeKu
g
gr
gg
gr
gr
g
gr
1
1
1
1
1
1
1
1
1111
11
11111
1
)1(
1)(
)(
)(
⋅+⋅
⋅+=
⋅+⋅=−
+⋅=−
⋅=
+⋅=
−=⋅=
3. Descripción analítica de los sist. de regul. y control
3.1 diagrama estructural
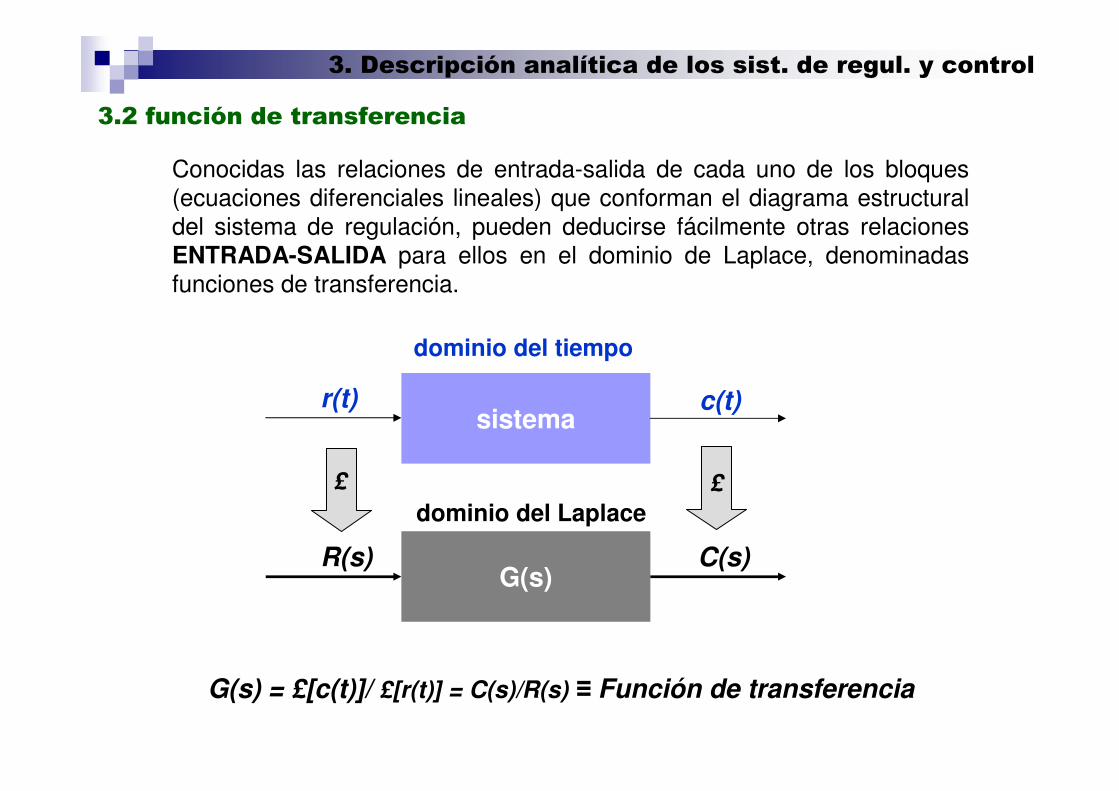
Conocidas las relaciones de entrada-salida de cada uno de los bloques (ecuaciones diferenciales lineales) que conforman el diagrama estructural del sistema de regulación, pueden deducirse fácilmente otras relaciones ENTRADA-SALIDA para ellos en el dominio de Laplace, denominadas funciones de transferencia.
sistema
G(s)
dominio del tiempo
dominio del Laplace
r(t) c(t)
R(s) C(s)
G(s) = £[c(t)]/ £[r(t)] = C(s)/R(s) ≡ Función de transferencia
£ £
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
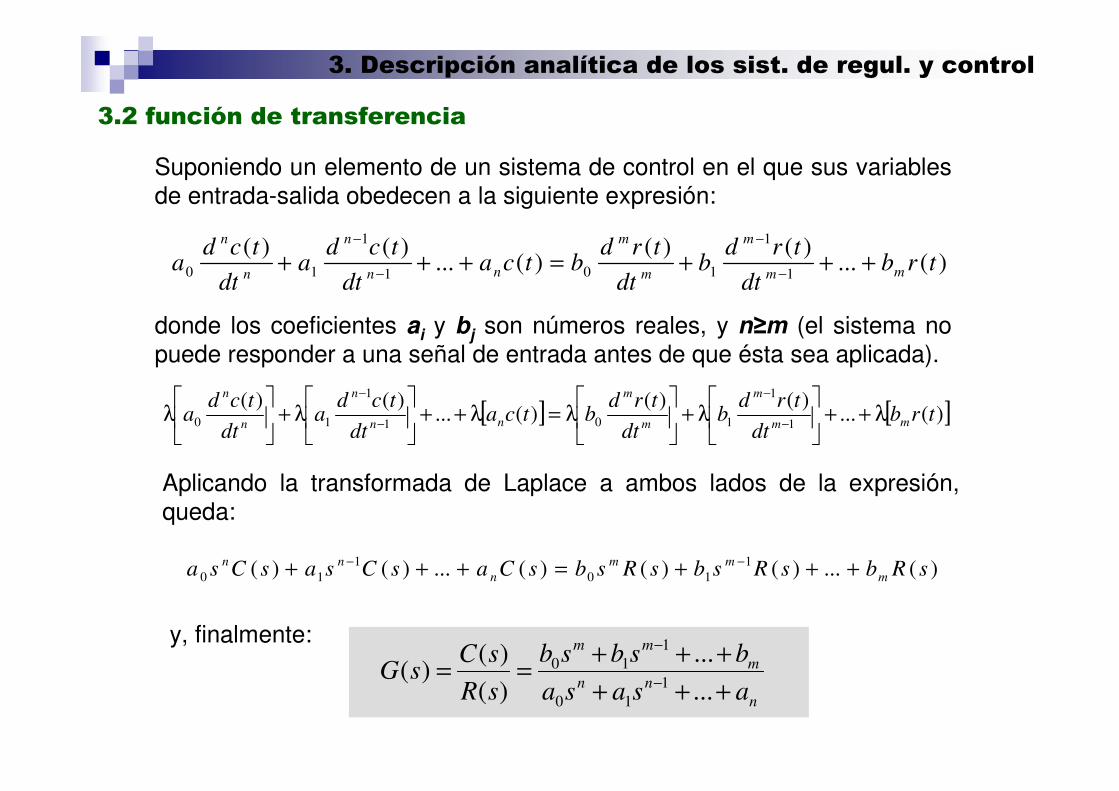
Suponiendo un elemento de un sistema de control en el que sus variables de entrada-salida obedecen a la siguiente expresión:
)(...)()(
)(...)()(
1
1
101
1
10 trbdt
trdb
dt
trdbtca
dt
tcda
dt
tcda mm
m
m
m
nn
n
n
n
+++=+++−
−
−
−
donde los coeficientes ai y bj son números reales, y n≥m (el sistema no puede responder a una señal de entrada antes de que ésta sea aplicada).
Aplicando la transformada de Laplace a ambos lados de la expresión, queda:
[ ] [ ])(...)()(
)(...)()(
1
1
101
1
10 trbdt
trdb
dt
trdbtca
dt
tcda
dt
tcda mm
m
m
m
nn
n
n
n
λλλλλλ ++
+
=++
+
−
−
−
−
)(...)()()(...)()( 1
10
1
10 sRbsRsbsRsbsCasCsasCsa m
mm
n
nn +++=+++ −−
y, finalmente:
n
nn
m
mm
asasa
bsbsb
sR
sCsG
+++
+++==
−
−
...
...
)(
)()(
1
10
1
10
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
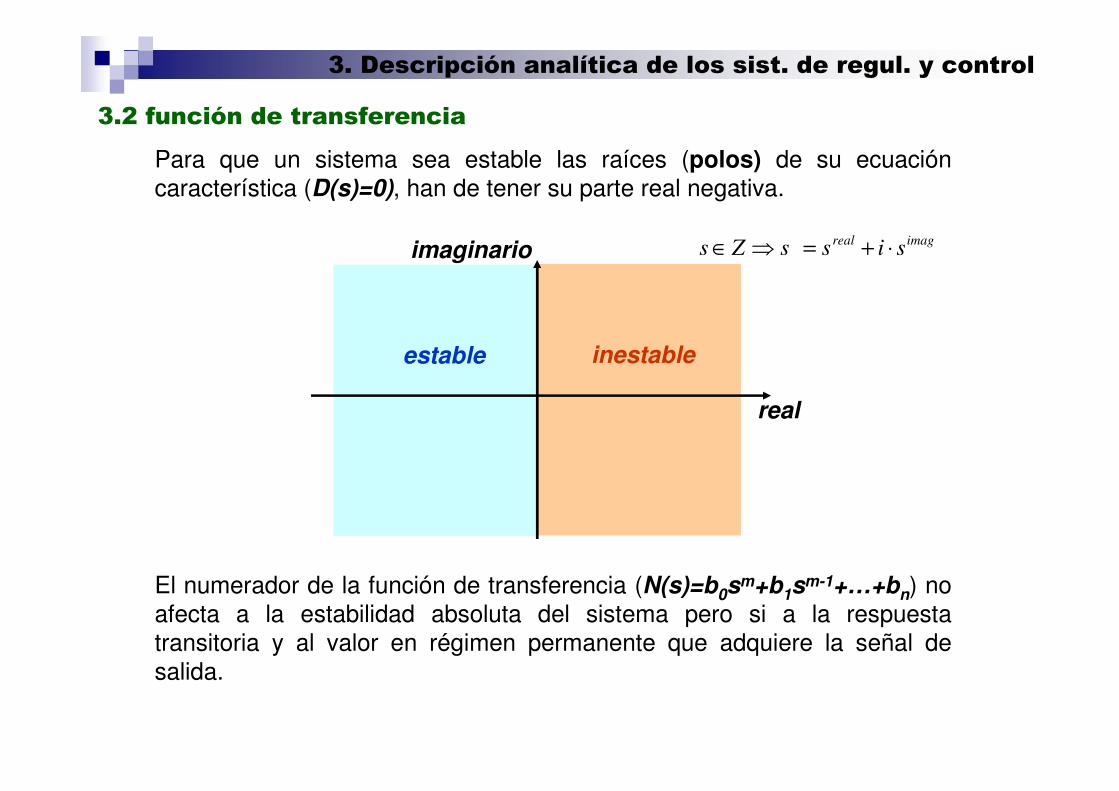
Para que un sistema sea estable las raíces (polos) de su ecuación característica (D(s)=0), han de tener su parte real negativa.
El numerador de la función de transferencia (N(s)=b0sm+b1sm-1+…+bn) no afecta a la estabilidad absoluta del sistema pero si a la respuesta transitoria y al valor en régimen permanente que adquiere la señal de salida.
imagreal sissZs ⋅+=⇒∈
real
imaginario
estable inestable
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
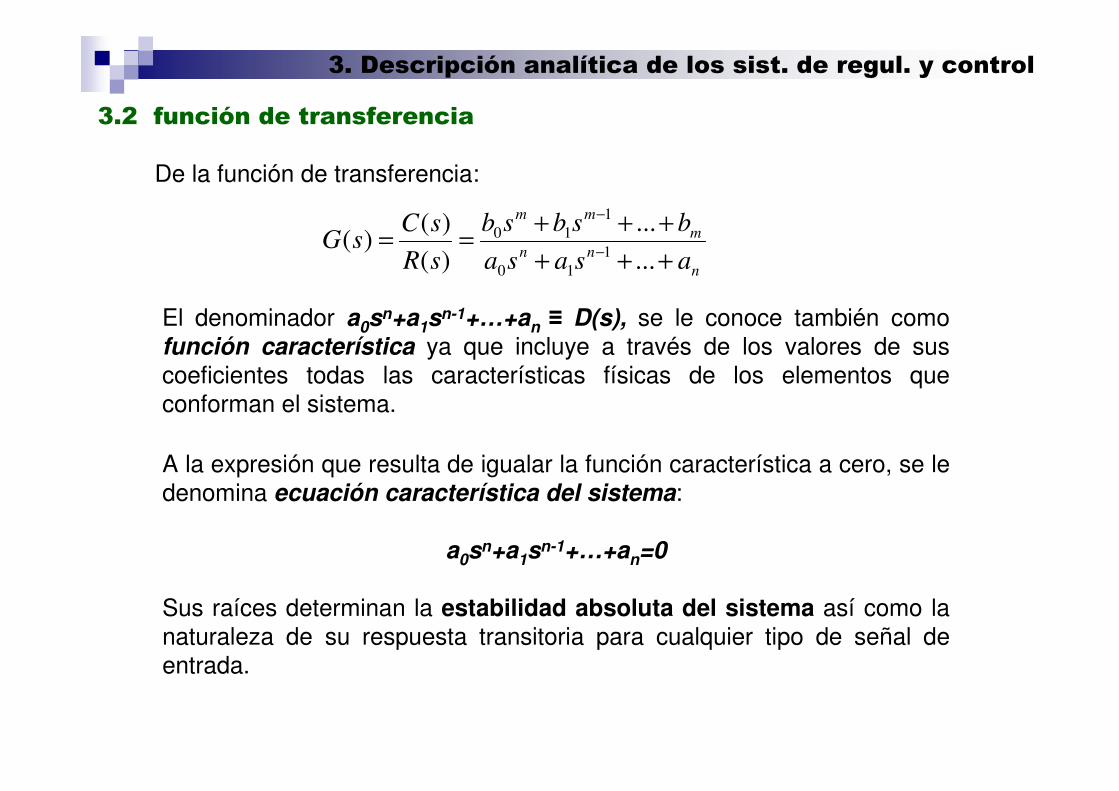
De la función de transferencia:
El denominador a0sn+a1sn-1+…+an ≡ D(s), se le conoce también como función característica ya que incluye a través de los valores de sus coeficientes todas las características físicas de los elementos que conforman el sistema.
n
nn
m
mm
asasa
bsbsb
sR
sCsG
+++
+++==
−
−
...
...
)(
)()(
1
10
1
10
A la expresión que resulta de igualar la función característica a cero, se le denomina ecuación característica del sistema:
a0sn+a1sn-1+…+an=0
Sus raíces determinan la estabilidad absoluta del sistema así como la naturaleza de su respuesta transitoria para cualquier tipo de señal de entrada.
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
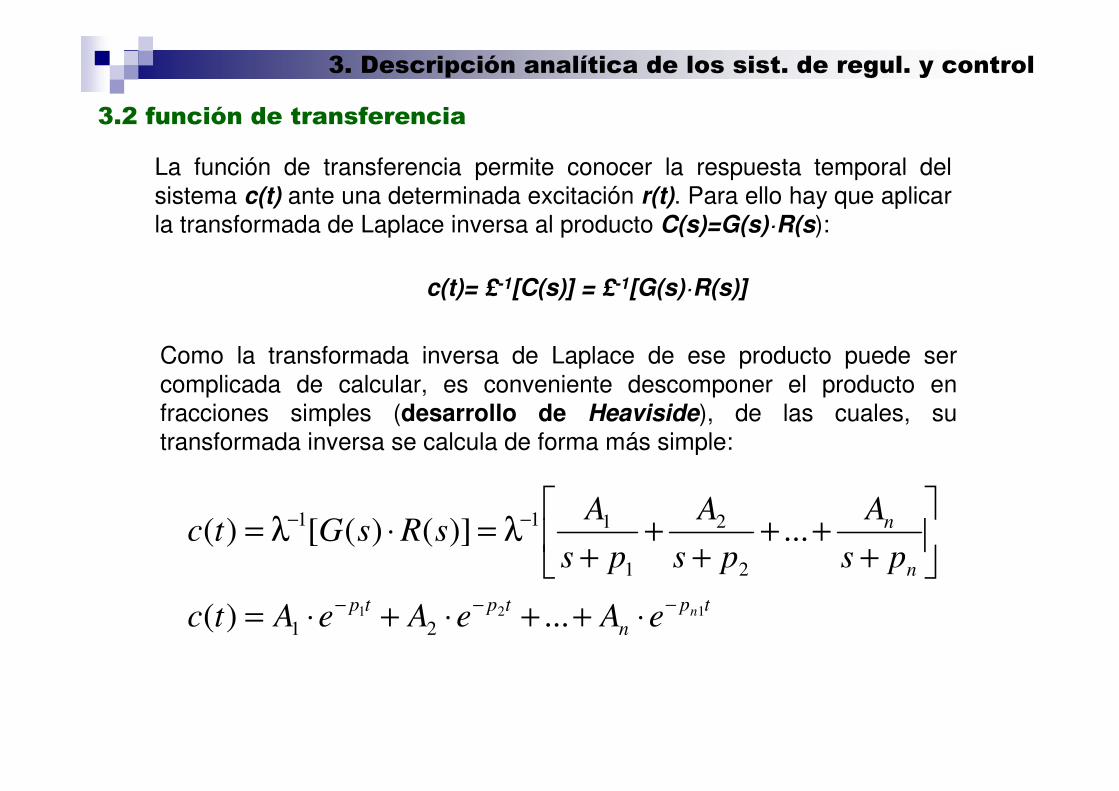
La función de transferencia permite conocer la respuesta temporal del sistema c(t) ante una determinada excitación r(t). Para ello hay que aplicar la transformada de Laplace inversa al producto C(s)=G(s)·R(s):
c(t)= £-1[C(s)] = £-1[G(s)·R(s)]
Como la transformada inversa de Laplace de ese producto puede ser complicada de calcular, es conveniente descomponer el producto en fracciones simples (desarrollo de Heaviside), de las cuales, su transformada inversa se calcula de forma más simple:
tp
n
tptp
n
n
neAeAeAtc
ps
A
ps
A
ps
AsRsGtc
121 ...)(
...)]()([)(
21
2
2
1
111
−−−
−−
⋅++⋅+⋅=
+++
++
+=⋅= λλ
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
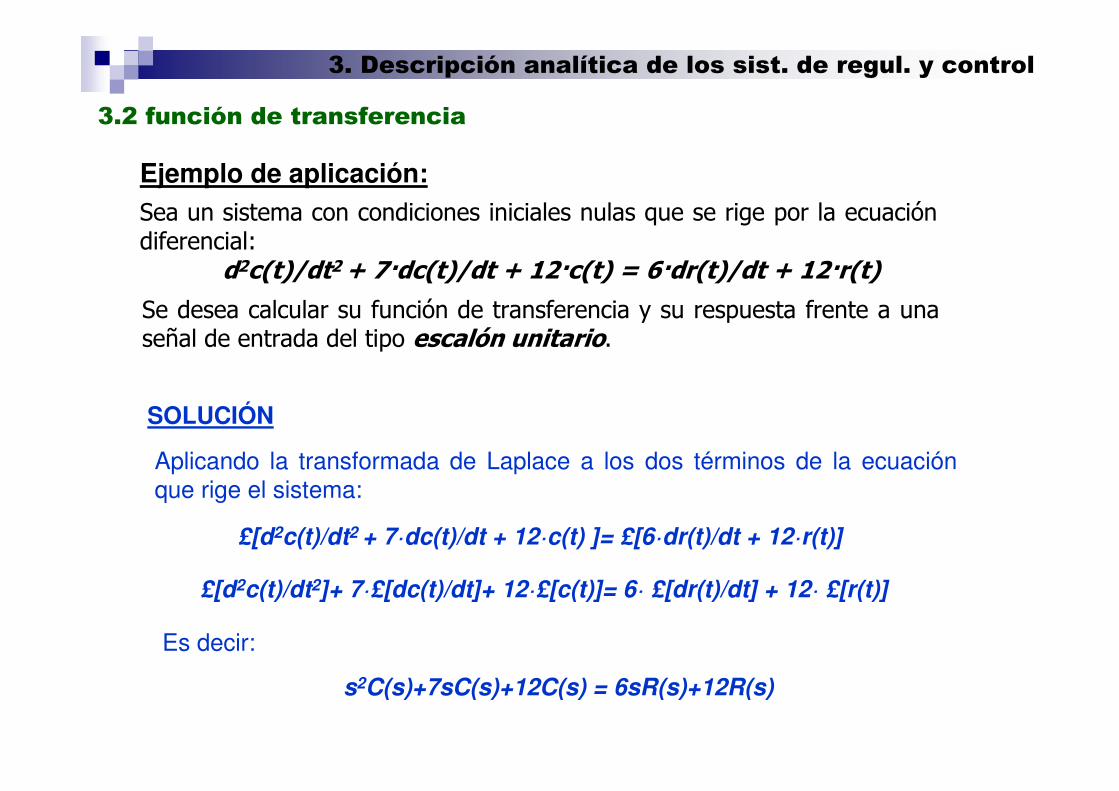
Sea un sistema con condiciones iniciales nulas que se rige por la ecuación diferencial:
Ejemplo de aplicación:
d2c(t)/dt2 + 7·dc(t)/dt + 12·c(t) = 6·dr(t)/dt + 12·r(t)
Se desea calcular su función de transferencia y su respuesta frente a una señal de entrada del tipo escalón unitario.
SOLUCIÓN
Aplicando la transformada de Laplace a los dos términos de la ecuación que rige el sistema:
£[d2c(t)/dt2 + 7·dc(t)/dt + 12·c(t) ]= £[6·dr(t)/dt + 12·r(t)]
£[d2c(t)/dt2]+ 7·£[dc(t)/dt]+ 12·£[c(t)]= 6· £[dr(t)/dt] + 12· £[r(t)]
s2C(s)+7sC(s)+12C(s) = 6sR(s)+12R(s)
Es decir:
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
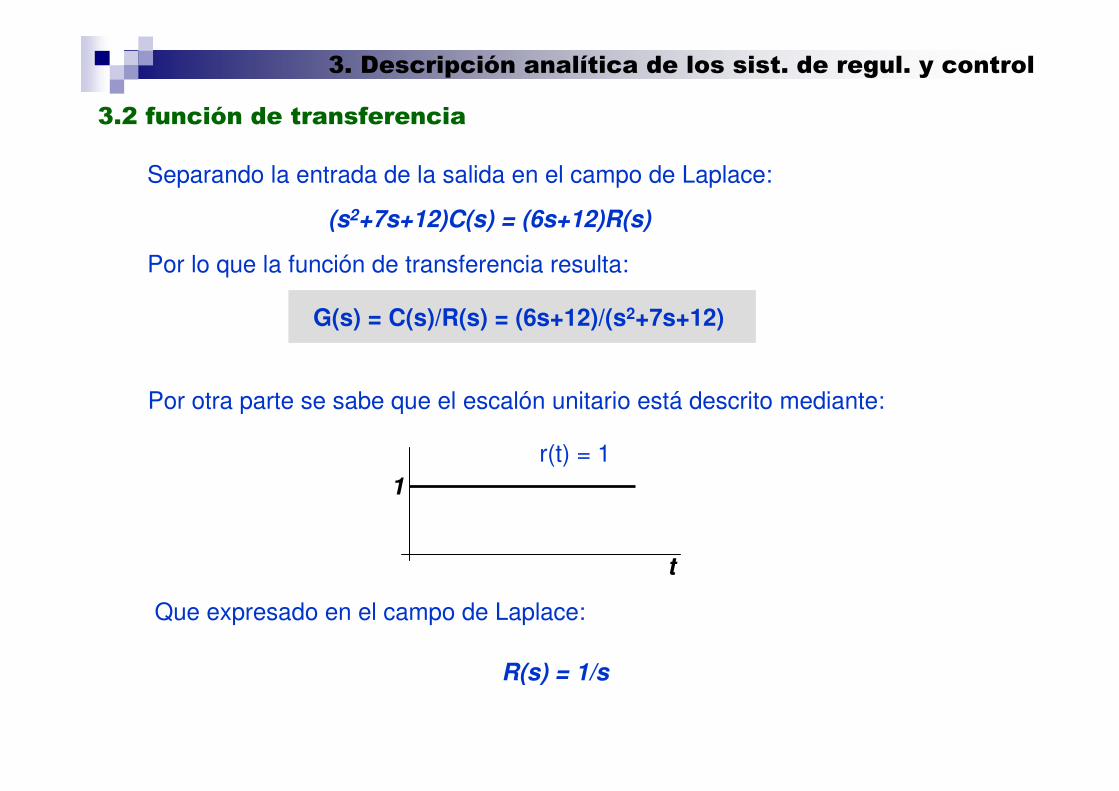
(s2+7s+12)C(s) = (6s+12)R(s)
Separando la entrada de la salida en el campo de Laplace:
Por lo que la función de transferencia resulta:
G(s) = C(s)/R(s) = (6s+12)/(s2+7s+12)
Por otra parte se sabe que el escalón unitario está descrito mediante:
r(t) = 1
t
1
Que expresado en el campo de Laplace:
R(s) = 1/s
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
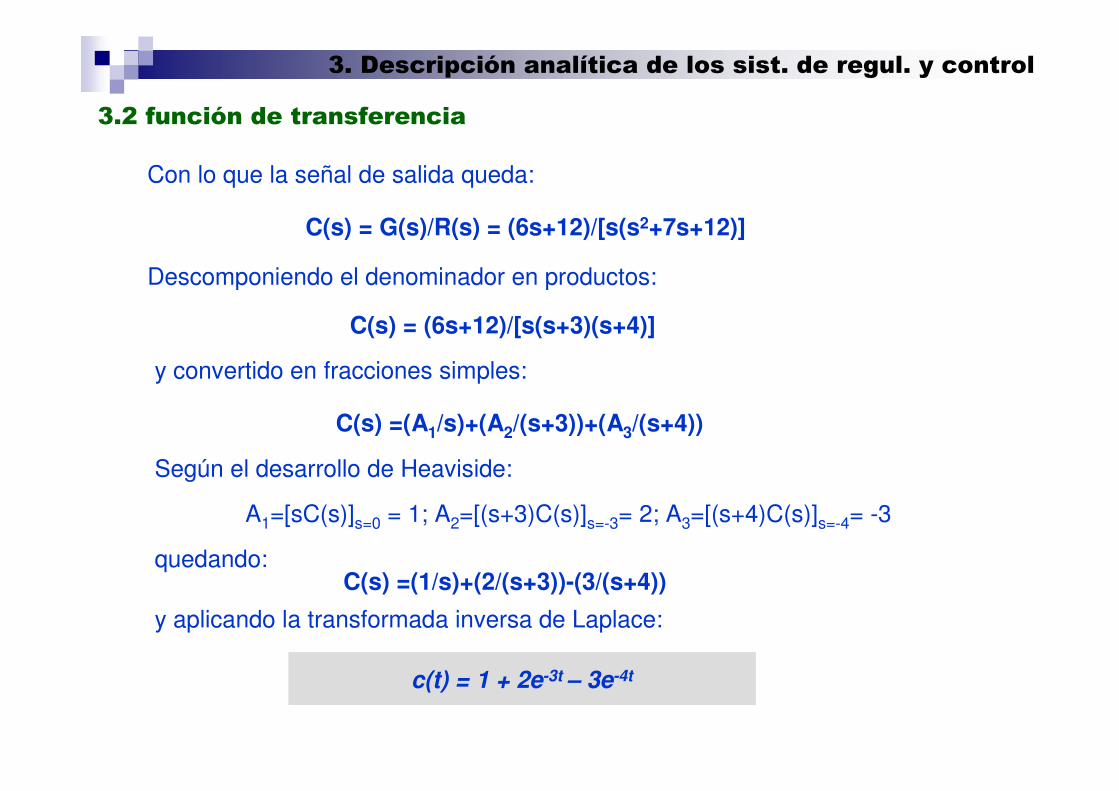
Con lo que la señal de salida queda:
C(s) = G(s)/R(s) = (6s+12)/[s(s2+7s+12)]
Descomponiendo el denominador en productos:
y convertido en fracciones simples:
C(s) = (6s+12)/[s(s+3)(s+4)]
C(s) =(A1/s)+(A2/(s+3))+(A3/(s+4))
Según el desarrollo de Heaviside:
A1=[sC(s)]s=0 = 1; A2=[(s+3)C(s)]s=-3= 2; A3=[(s+4)C(s)]s=-4= -3
quedando:C(s) =(1/s)+(2/(s+3))-(3/(s+4))
y aplicando la transformada inversa de Laplace:
c(t) = 1 + 2e-3t – 3e-4t
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
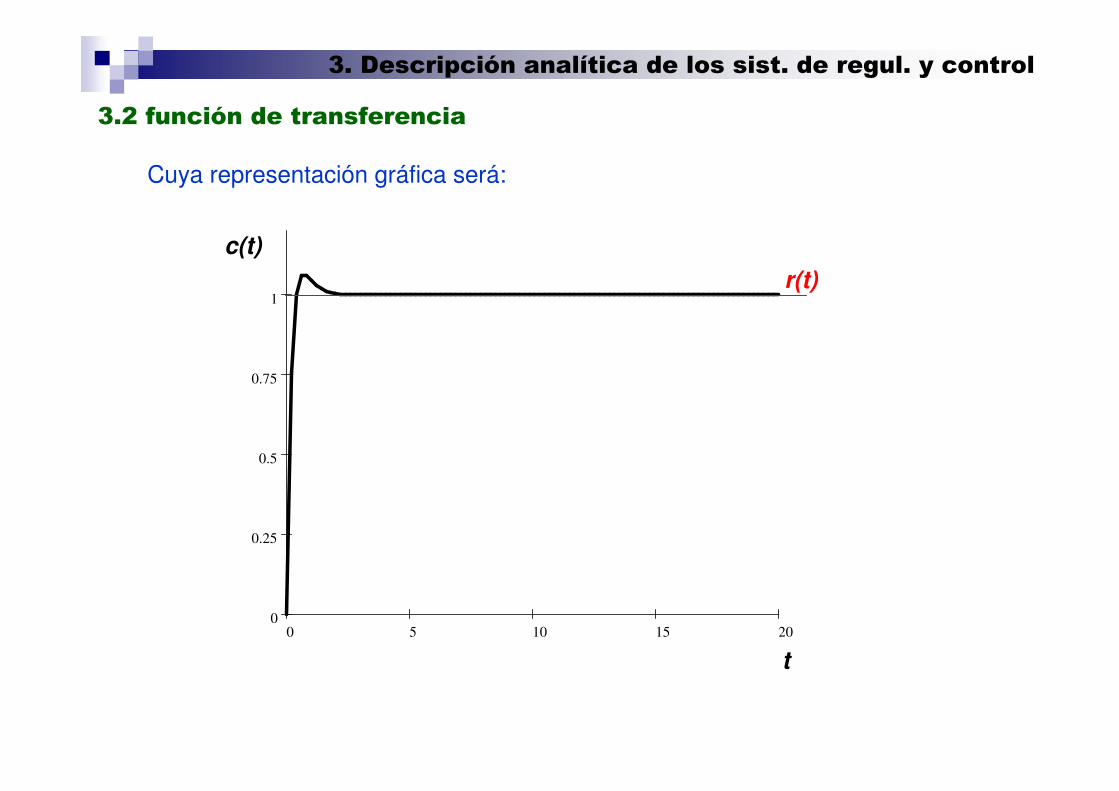
Cuya representación gráfica será:
20151050
1
0.75
0.5
0.25
0
x
y
x
yc(t)
t
r(t)
3. Descripción analítica de los sist. de regul. y control
3.2 función de transferencia
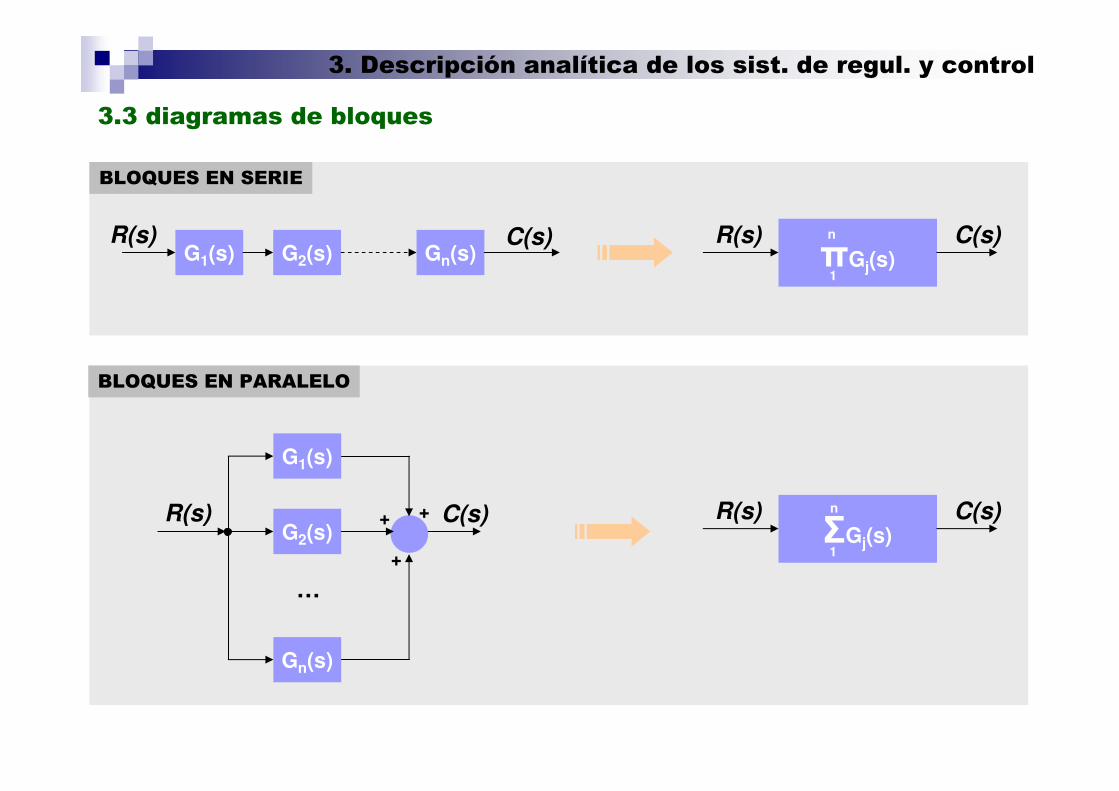
BLOQUES EN SERIE
G1(s) G2(s) Gn(s)C(s)R(s)
πGj(s)R(s) C(s)
1
n
BLOQUES EN PARALELO
G1(s)
G2(s)
Gn(s)
…
R(s) ++
+
C(s)ΣGj(s)
R(s) C(s)
1
n
3. Descripción analítica de los sist. de regul. y control
3.3 diagramas de bloques
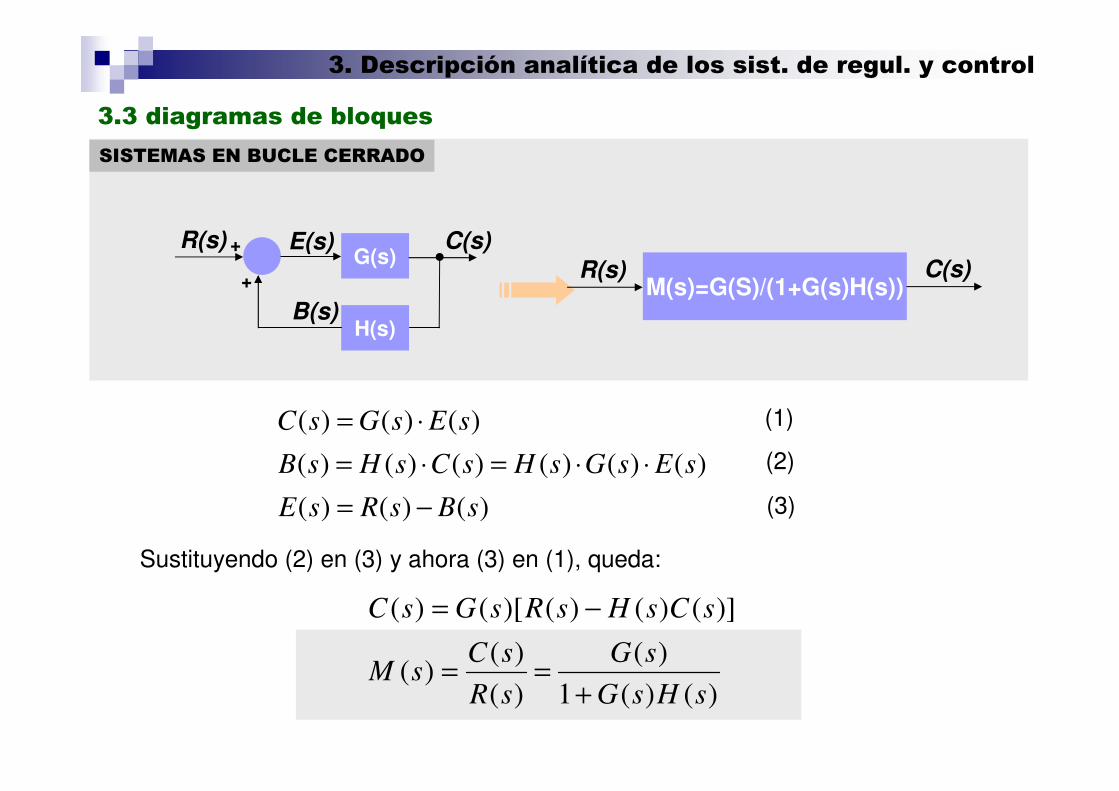
SISTEMAS EN BUCLE CERRADO
G(s)
H(s)
R(s) +
+
C(s)
M(s)=G(S)/(1+G(s)H(s))R(s) C(s)
E(s)
B(s)
)()()(
)()()()()()(
)()()(
sBsRsE
sEsGsHsCsHsB
sEsGsC
−=
⋅⋅=⋅=
⋅= (1)
(2)
(3)
Sustituyendo (2) en (3) y ahora (3) en (1), queda:
)()(1
)(
)(
)()(
)]()()()[()(
sHsG
sG
sR
sCsM
sCsHsRsGsC
+==
−=
3. Descripción analítica de los sist. de regul. y control
3.3 diagramas de bloques
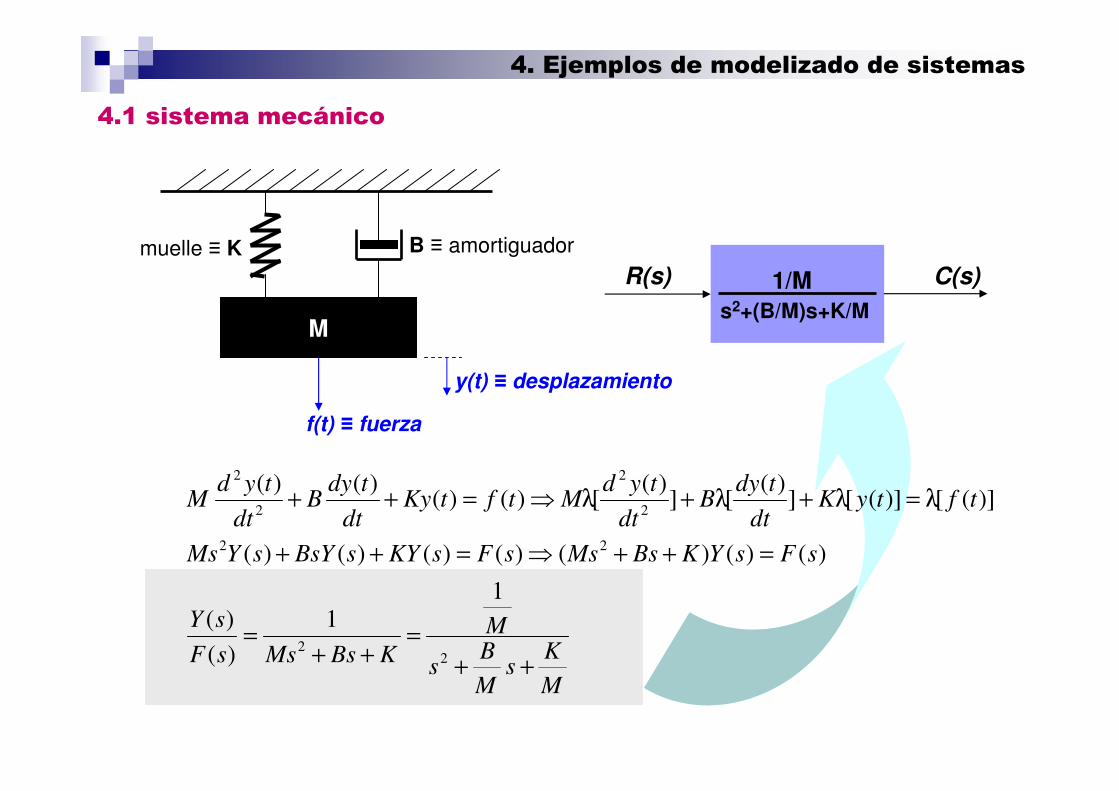
4. Ejemplos de modelizado de sistemas
4.1 sistema mecánico
M
B ≡ amortiguadormuelle ≡ KR(s) C(s)1/M
s2+(B/M)s+K/M
y(t) ≡ desplazamiento
f(t) ≡ fuerza
M
Ks
M
Bs
M
KBsMssF
sY
sFsYKBsMssFsKYsBsYsYMs
tftyKdt
tdyB
dt
tydMtftKy
dt
tdyB
dt
tydM
++
=++
=
=++⇒=++
=++⇒=++
22
22
2
2
2
2
11
)(
)(
)()()()()()()(
)]([)]([])(
[])(
[)()()()(
λλλλ
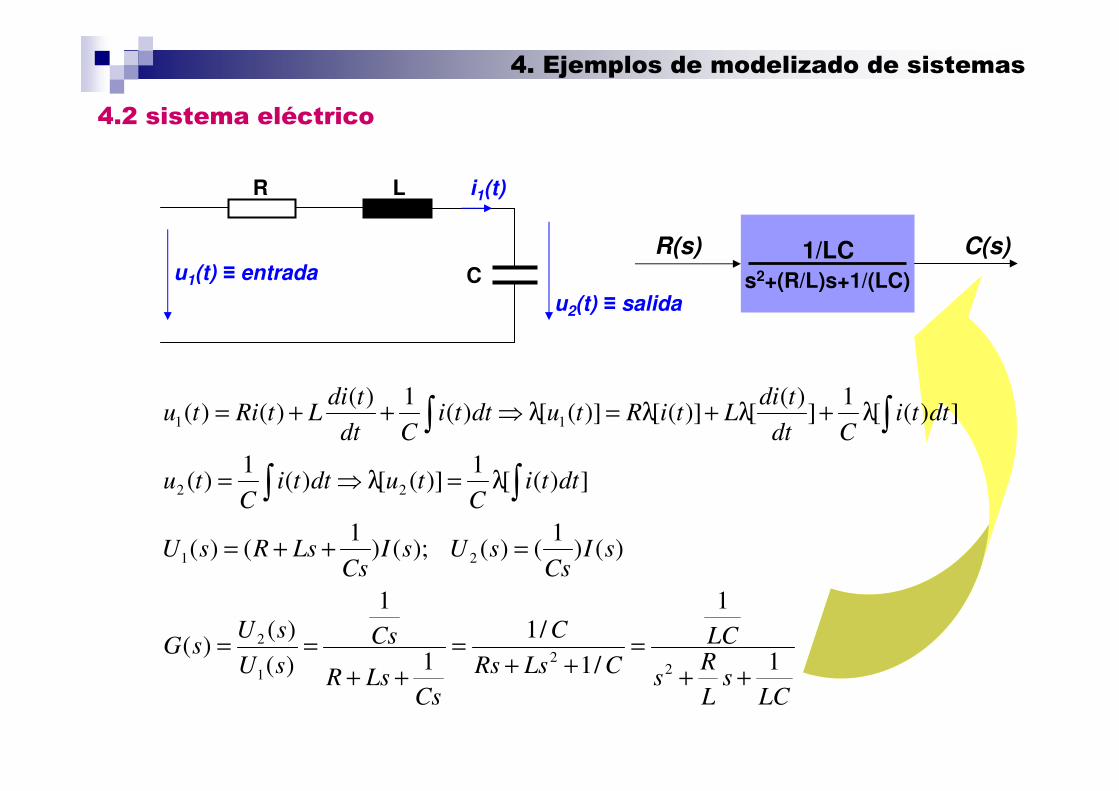
u1(t) ≡ entrada
u2(t) ≡ salida
R L
C
i1(t)
LCs
L
Rs
LC
CLsRs
C
CsLsR
Cs
sU
sUsG
sICs
sUsICs
LsRsU
dttiC
tudttiC
tu
dttiCdt
tdiLtiRtudtti
Cdt
tdiLtRitu
1
1
/1
/1
1
1
)(
)()(
)()1
()();()1
()(
])([1
)]([)(1
)(
])([1
])(
[)]([)]([)(1)(
)()(
22
1
2
21
22
11
++
=++
=
++
==
=++=
=⇒=
++=⇒++=
∫∫
∫∫
λλ
λλλλ
R(s) C(s)1/LCs2+(R/L)s+1/(LC)
4. Ejemplos de modelizado de sistemas
4.2 sistema eléctrico
• Estudio de la estabilidad absoluta y relativa del sistema.• Estudio de la respuesta del sistema en régimen transitorio.• Estudio de la precisión del sistema en régimen permanente.
Los objetivos fundamentales del análisis de los sistemas de control son:
Las dos técnicas utilizadas en el análisis de los sistemas de regulación son:
• ANÁLISIS EN EL DOMINIO DEL TIEMPO
• ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
El análisis en el dominio del tiempo se apoya en la solución de la ecuación diferencial del sistema para hallar las respuestas correspondientes al régimen transitorio y al régimen permanente. El método utiliza diferentes señales de excitación para conocer dichas respuestas.
El método de análisis en el dominio de la frecuencia utiliza como señal una función senoidal de frecuencia variable. El comportamiento del sistema queda determinado por su respuesta a esa señal en frecuencia y amplitud.
5. Análisis de los sistemas de regulación y control
5. Análisis de los sistemas de regulación y control
5.1 Análisis en el dominio del tiempo
Se denomina así al análisis del comportamiento de los sistemas de regulación ante una determinada señal de excitación. Esto equivale a conocer la respuesta temporal del sistema.
Se denomina respuesta temporal a la evolución de la señal de salida en función del tiempo cuando al sistema se aplica una señal de entrada específica.
La respuesta temporal del sistema se puede conocer:
2º Si no se conoce de antemano la función de transferencia: se somete alsistema a una función de Dirac δ(t) (función impulso) con elfin de conocer su respuesta impulsional y por extensión su función detransferencia. Conocida la función de transferencia sepuede calcular de forma inmediata la respuesta del sistema ante unaseñal cualquiera.
1º Si se conoce de antemano la función de transferencia que describe alsistema de control: se obtiene la respuesta en el campo de LaplaceC(s)=G(s)R(s), y después se halla la transformada inversac(t)= £-1[C(s)].
La respuesta temporal consta de dos términos: uno correspondiente a la parte transitoria, y el otro a la permanente:
c(t) = £-1[C(s)] = crt(t) + crp(t)
Respuesta temporal transitoria
Respuesta temporal permanente
La respuesta transitoria ha de anularse cuando ha transcurrido un tiempo considerable desde la aplicación de la señal de excitación:
0)(lim =∞→
tcrtt
La respuesta permanente es la que se obtiene del sistema después de haber transcurrido un largo período de tiempo desde la aplicación de la señal de excitación:
)(lim)( tctct
rp∞→
=
ESTABILIDAD
PRECISIÓN
5. Análisis de los sistemas de regulación y control
5.1 Análisis en el dominio del tiempo
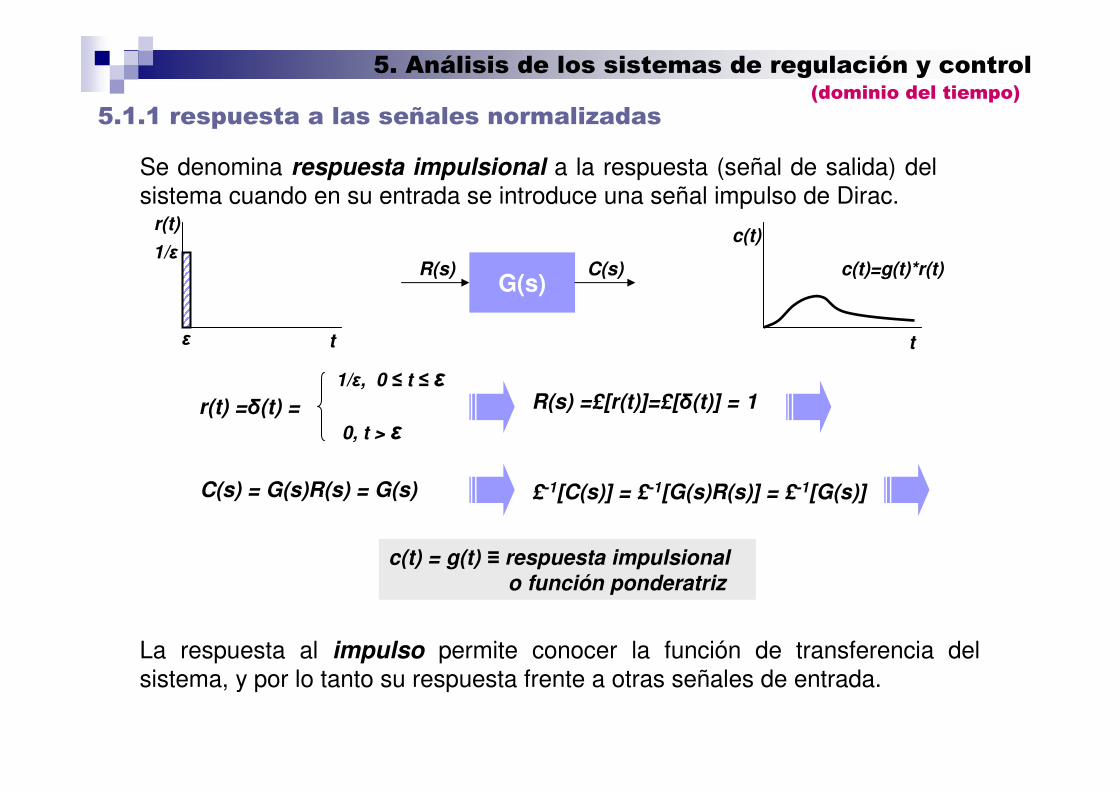
Se denomina respuesta impulsional a la respuesta (señal de salida) del sistema cuando en su entrada se introduce una señal impulso de Dirac.
G(s)
r(t)
t
c(t)
t
R(s) C(s)
ε
1/ε
r(t) =δ(t) =1/ε, 0 ≤ t ≤ ε
0, t > εR(s) =£[r(t)]=£[δ(t)] = 1
C(s) = G(s)R(s) = G(s) £-1[C(s)] = £-1[G(s)R(s)] = £-1[G(s)]
c(t) = g(t) ≡ respuesta impulsionalo función ponderatriz
c(t)=g(t)*r(t)
5. Análisis de los sistemas de regulación y control
5.1.1 respuesta a las señales normalizadas(dominio del tiempo)
La respuesta al impulso permite conocer la función de transferencia del sistema, y por lo tanto su respuesta frente a otras señales de entrada.
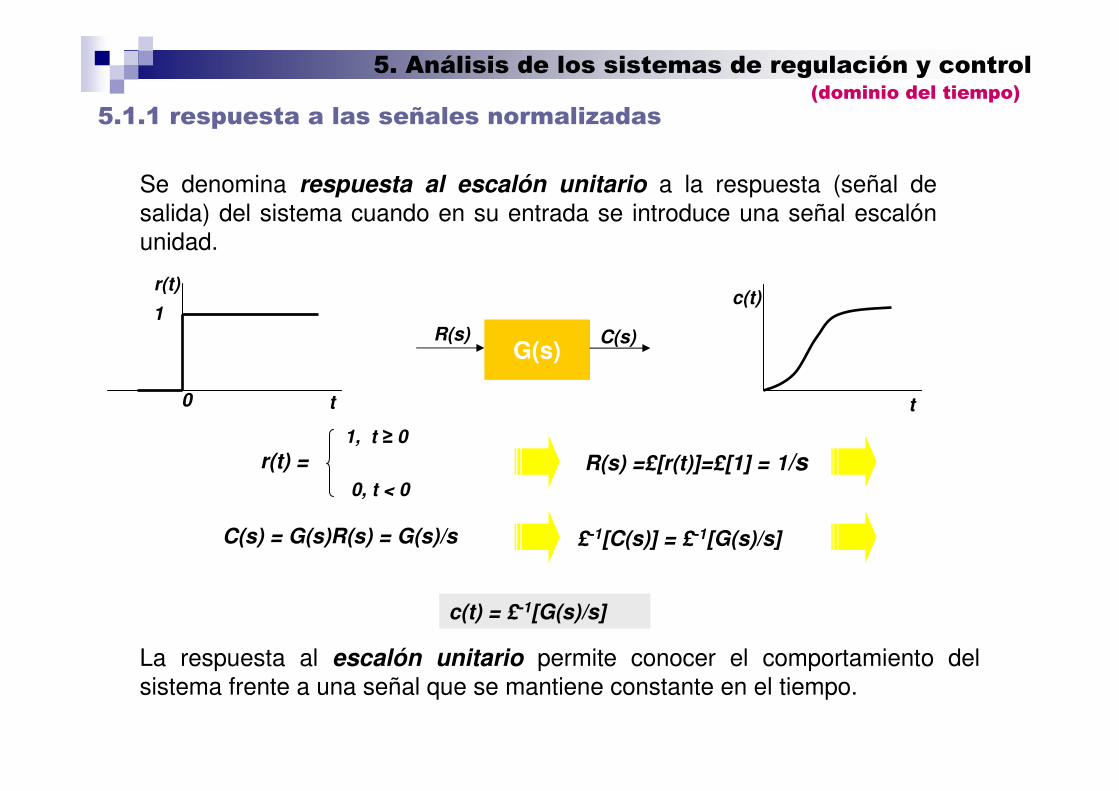
Se denomina respuesta al escalón unitario a la respuesta (señal de salida) del sistema cuando en su entrada se introduce una señal escalón unidad.
G(s)
r(t)
t
c(t)
t
R(s) C(s)
0
1
r(t) =1, t ≥ 0
0, t < 0R(s) =£[r(t)]=£[1] = 1/s
C(s) = G(s)R(s) = G(s)/s £-1[C(s)] = £-1[G(s)/s]
c(t) = £-1[G(s)/s]
5. Análisis de los sistemas de regulación y control
5.1.1 respuesta a las señales normalizadas(dominio del tiempo)
La respuesta al escalón unitario permite conocer el comportamiento del sistema frente a una señal que se mantiene constante en el tiempo.
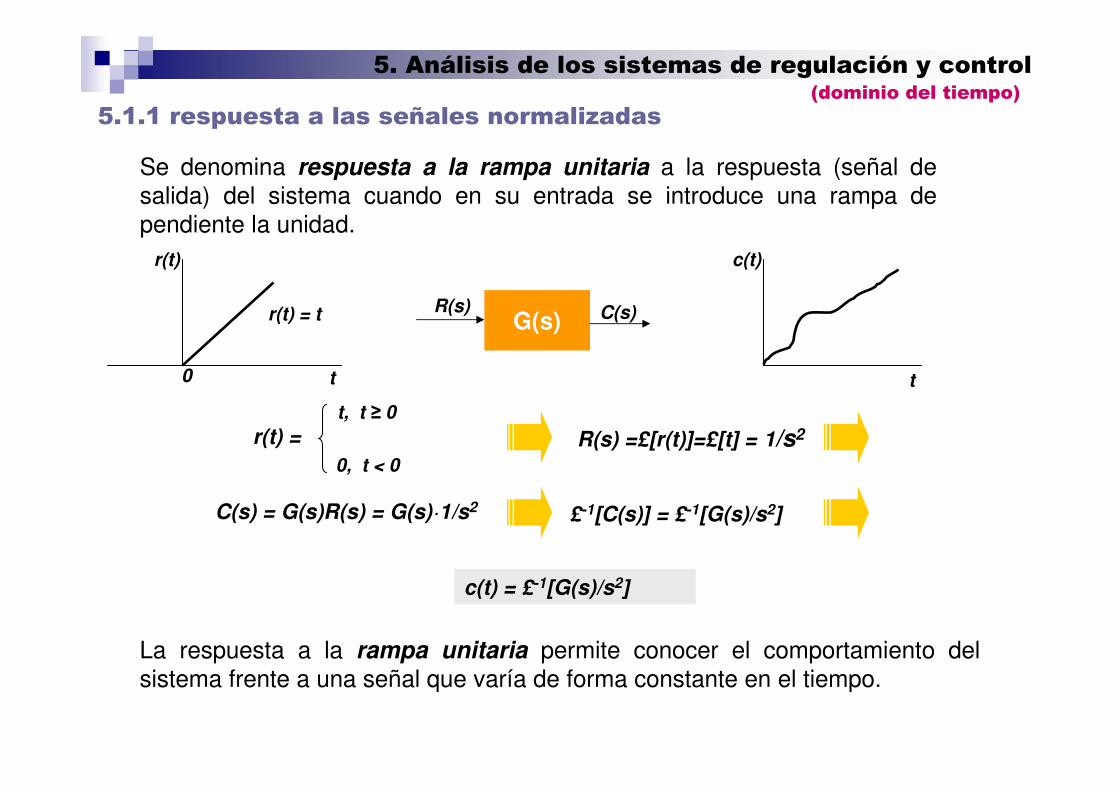
Se denomina respuesta a la rampa unitaria a la respuesta (señal de salida) del sistema cuando en su entrada se introduce una rampa de pendiente la unidad.
G(s)
r(t)
t
c(t)
t
R(s) C(s)
0
r(t) = t
r(t) =t, t ≥ 0
0, t < 0R(s) =£[r(t)]=£[t] = 1/s2
C(s) = G(s)R(s) = G(s)·1/s2 £-1[C(s)] = £-1[G(s)/s2]
c(t) = £-1[G(s)/s2]
La respuesta a la rampa unitaria permite conocer el comportamiento del sistema frente a una señal que varía de forma constante en el tiempo.
5. Análisis de los sistemas de regulación y control
5.1.1 respuesta a las señales normalizadas(dominio del tiempo)
n
nn
m
mm
asasa
bsbsb
sR
sCsG
+++
+++==
−
−
...
...
)(
)()(
1
10
1
10
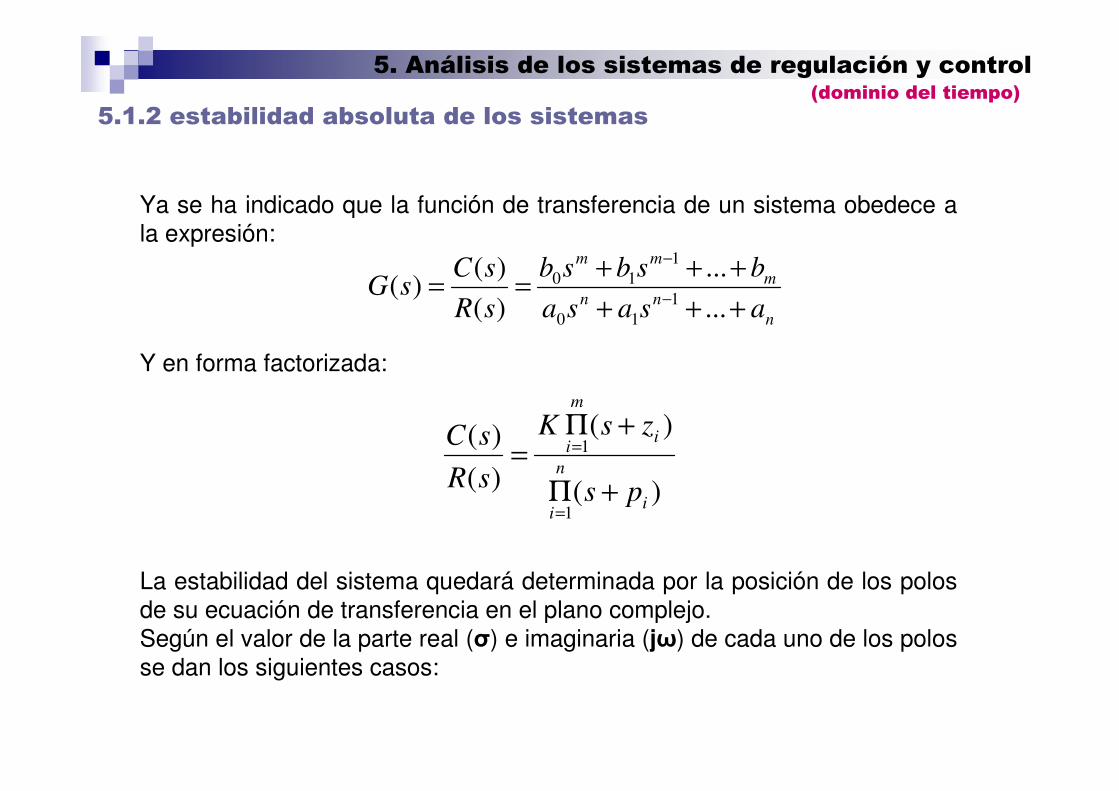
Ya se ha indicado que la función de transferencia de un sistema obedece a la expresión:
Y en forma factorizada:
)(
)(
)(
)(
1
1
i
n
i
i
m
i
ps
zsK
sR
sC
+Π
+Π=
=
=
La estabilidad del sistema quedará determinada por la posición de los polos de su ecuación de transferencia en el plano complejo.Según el valor de la parte real (σ) e imaginaria (jω) de cada uno de los polos se dan los siguientes casos:
5. Análisis de los sistemas de regulación y control
5.1.2 estabilidad absoluta de los sistemas(dominio del tiempo)
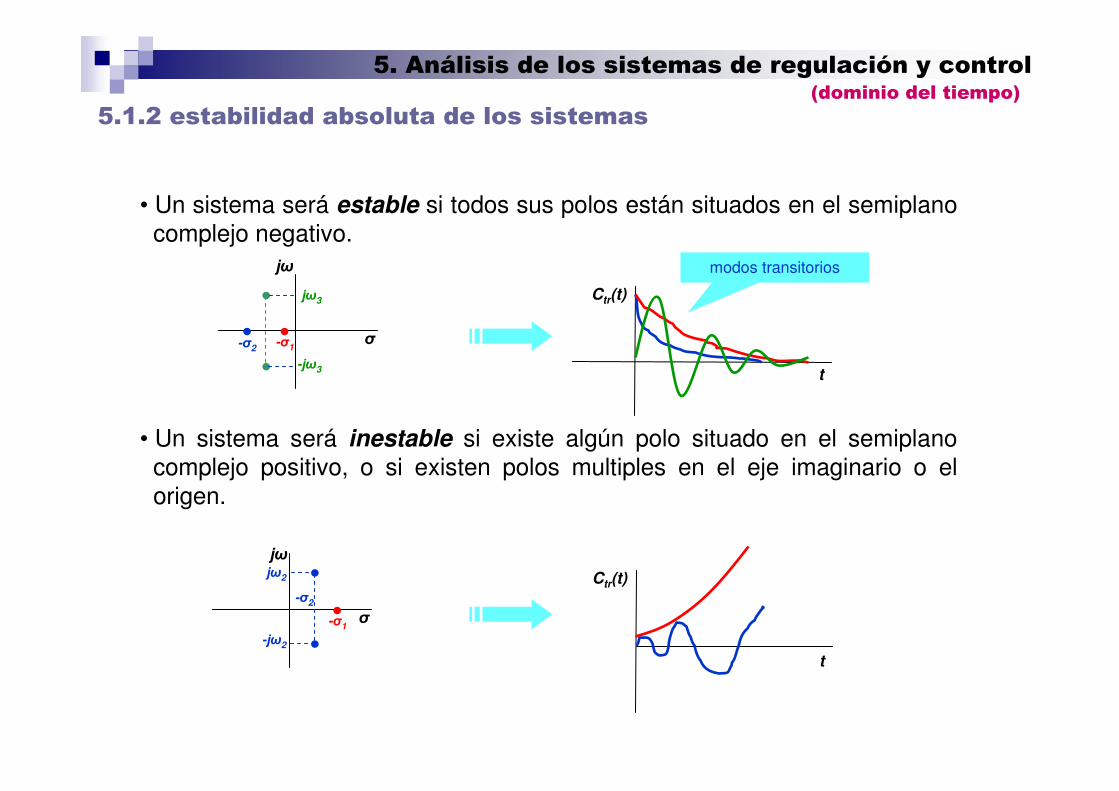
• Un sistema será estable si todos sus polos están situados en el semiplanocomplejo negativo.
jω
σ-σ1-σ2
Ctr(t)
t
• Un sistema será inestable si existe algún polo situado en el semiplanocomplejo positivo, o si existen polos multiples en el eje imaginario o elorigen.
jω
σ-σ1
-σ2
-jω2
jω2 Ctr(t)
t
-jω3
jω3
modos transitorios
5. Análisis de los sistemas de regulación y control
5.1.2 estabilidad absoluta de los sistemas(dominio del tiempo)
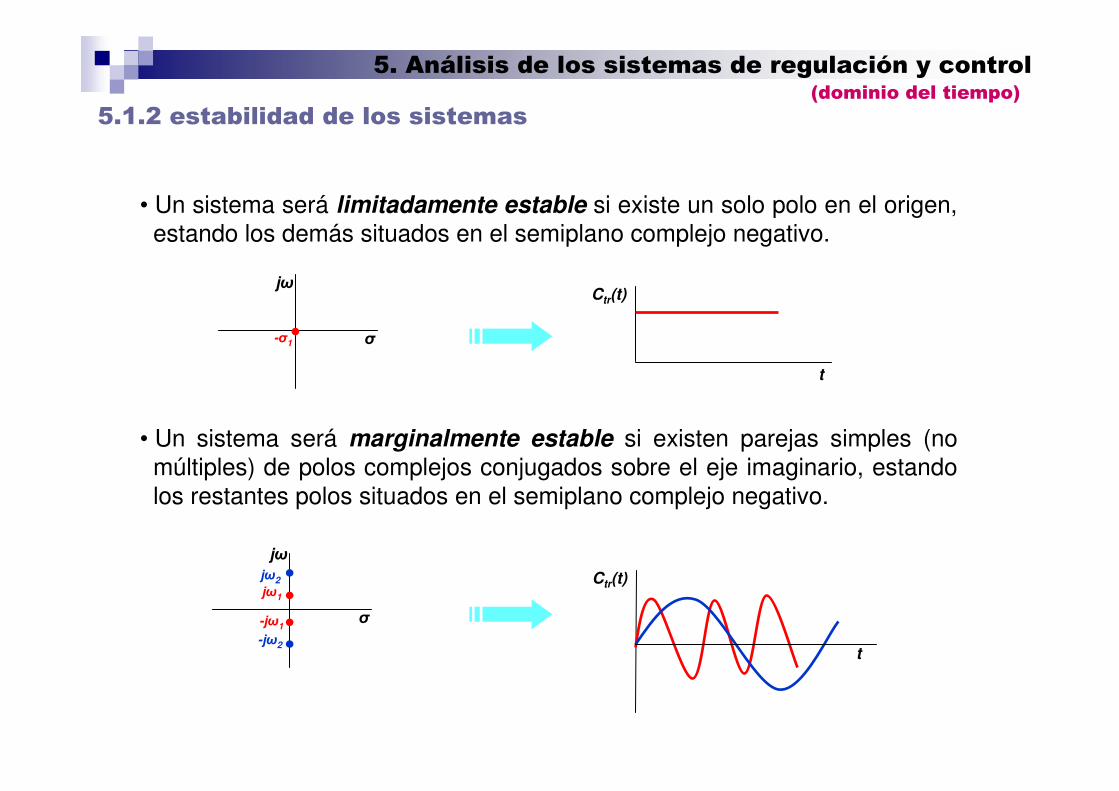
• Un sistema será limitadamente estable si existe un solo polo en el origen,estando los demás situados en el semiplano complejo negativo.
jω
σ-σ1
Ctr(t)
t
• Un sistema será marginalmente estable si existen parejas simples (nomúltiples) de polos complejos conjugados sobre el eje imaginario, estandolos restantes polos situados en el semiplano complejo negativo.
jω
σ-jω1
-jω2
jω2 Ctr(t)
t
jω1
5. Análisis de los sistemas de regulación y control
5.1.2 estabilidad de los sistemas(dominio del tiempo)
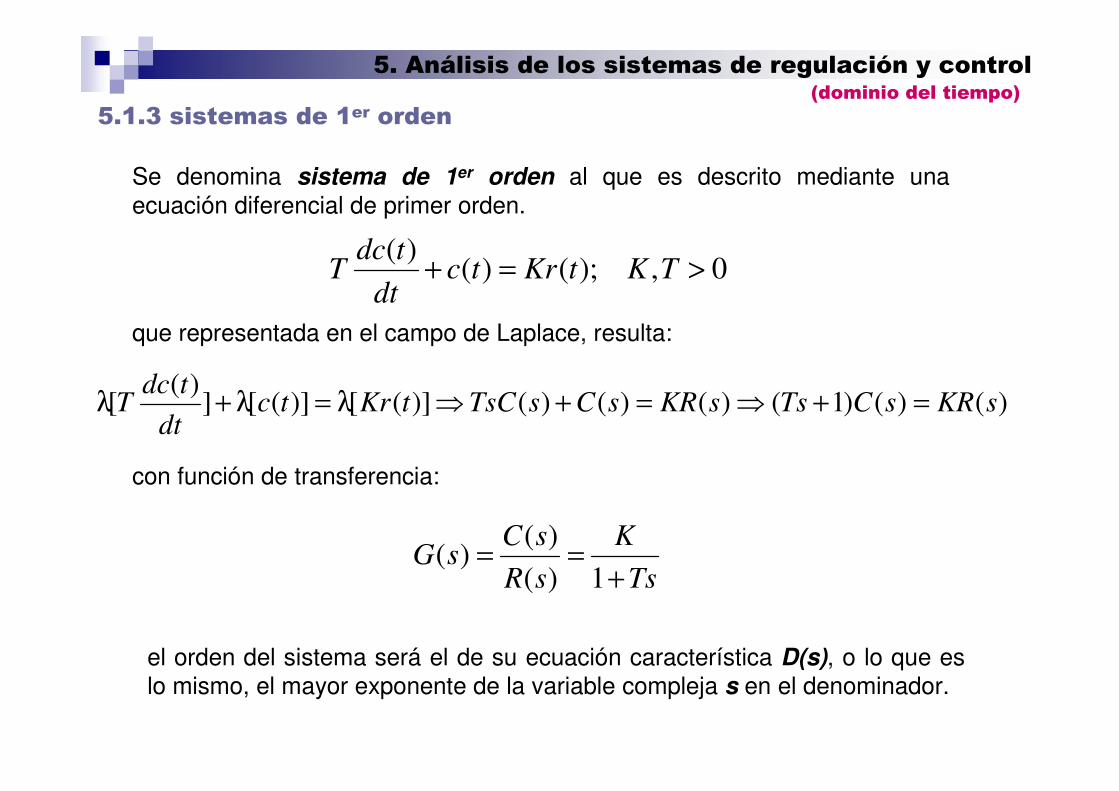
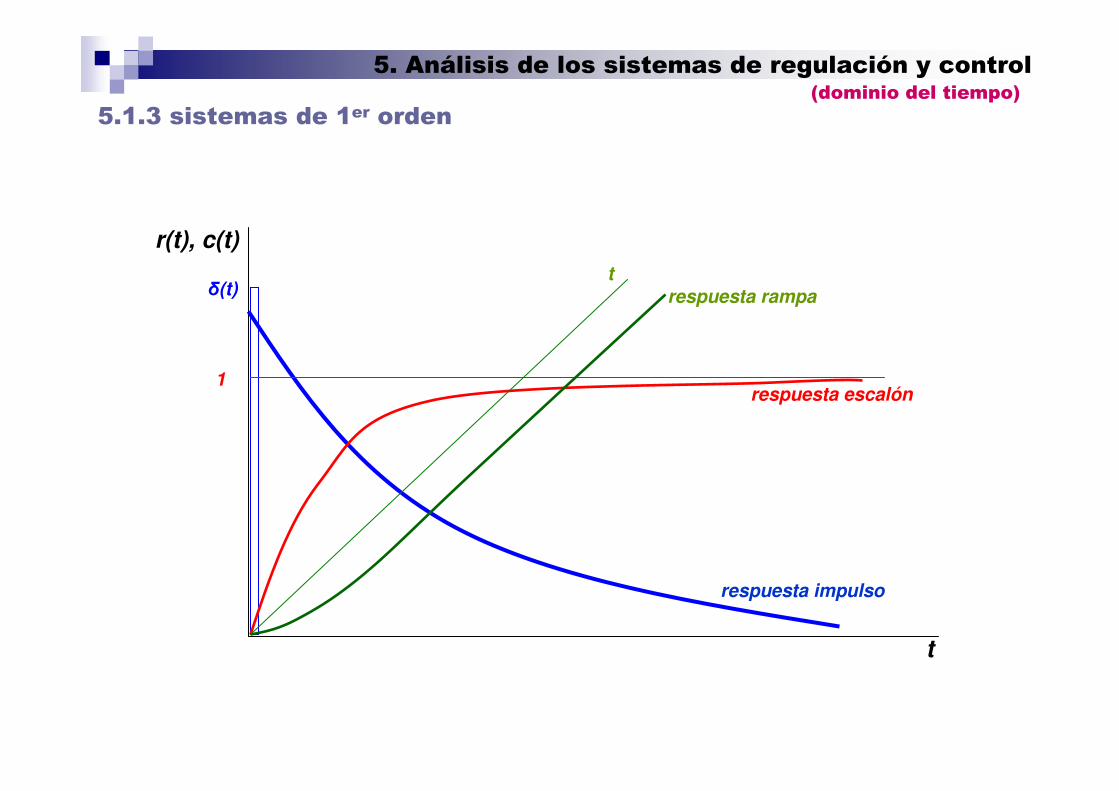
Se denomina sistema de 1er orden al que es descrito mediante unaecuación diferencial de primer orden.
el orden del sistema será el de su ecuación característica D(s), o lo que es lo mismo, el mayor exponente de la variable compleja s en el denominador.
5. Análisis de los sistemas de regulación y control
5.1.3 sistemas de 1er orden(dominio del tiempo)
0,);()()(
>=+ TKtKrtcdt
tdcT
que representada en el campo de Laplace, resulta:
)()()1()()()()]([)]([])(
[ sKRsCTssKRsCsTsCtKrtcdt
tdcT =+⇒=+⇒=+ λλλ
Ts
K
sR
sCsG
+==
1)(
)()(
con función de transferencia:
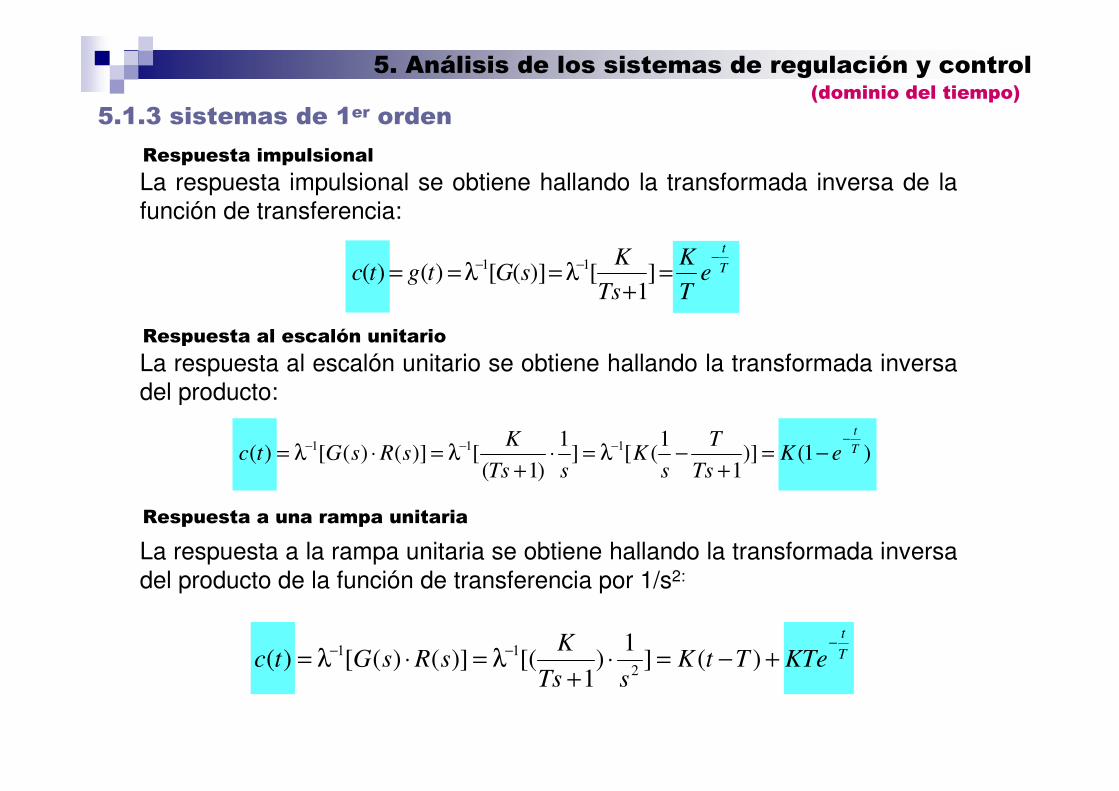
La respuesta impulsional se obtiene hallando la transformada inversa de la función de transferencia:
Respuesta impulsional
T
t
eT
K
Ts
KsGtgtc
−−− =
+=== ]
1[)]([)()( 11 λλ
5. Análisis de los sistemas de regulación y control
5.1.3 sistemas de 1er orden(dominio del tiempo)
La respuesta al escalón unitario se obtiene hallando la transformada inversa del producto:
Respuesta al escalón unitario
)1()]1
1([]
1
)1([)]()([)( 111 T
t
eKTs
T
sK
sTs
KsRsGtc
−−−− −=
+−=⋅
+=⋅= λλλ
La respuesta a la rampa unitaria se obtiene hallando la transformada inversa del producto de la función de transferencia por 1/s2:
Respuesta a una rampa unitaria
T
t
KTeTtKsTs
KsRsGtc
−−− +−=⋅
+=⋅= )(]
1)
1[()]()([)(
2
11 λλ
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.3 sistemas de 1er orden
t
r(t), c(t)
respuesta impulso
respuesta escalón1
δ(t)t
respuesta rampa
Los sistemas de 2º orden son aquellos cuyas variables de entrada y salida están relacionadas por medio de una ecuación diferencial de 2º orden.
Tienen una gran importancia en el campo de la regulación automática debido a que multitud de sistemas físicos pueden describirse mediante este tipo de ecuación.
La ecuación diferencial que define el comportamiento de un sistema de 2ºorden simple es:
)()()(
2)(2
2 tKrtcdt
tdcaT
dt
tcdT =++
)()()12( 22 sKRsCaTssT =++
12)(
)()(
22 ++==
aTssT
K
sR
sCsG
que expresada en el campo de Laplace es:
y, por lo tanto, su función de transferencia:
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.4 sistemas de 2º orden
Bajo un punto de vista práctico es interesante caracterizar los sistemas de 2ºorden mediante ciertos parámetros que tengan una significación física, y es por ello por lo que la función de transferencia se expresará como:
22
2
2)(
)()(
nn
n
ss
K
sR
sCsG
ωξω
ω
++==
donde:
K = ganancia del sistema
ωn = frecuencia natural no amortiguada = 1/T (rad/s)
ξ = coefieciente de amortiguamiento
y definiendo nuevos términos:
σ = ξ·ωn = constante de amortiguamiento o factor de decrecimiento
ωd = ωn (1-ξ2)1/2 = frecuencia amortiguada (rad/s)
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.4 sistemas de 2º orden
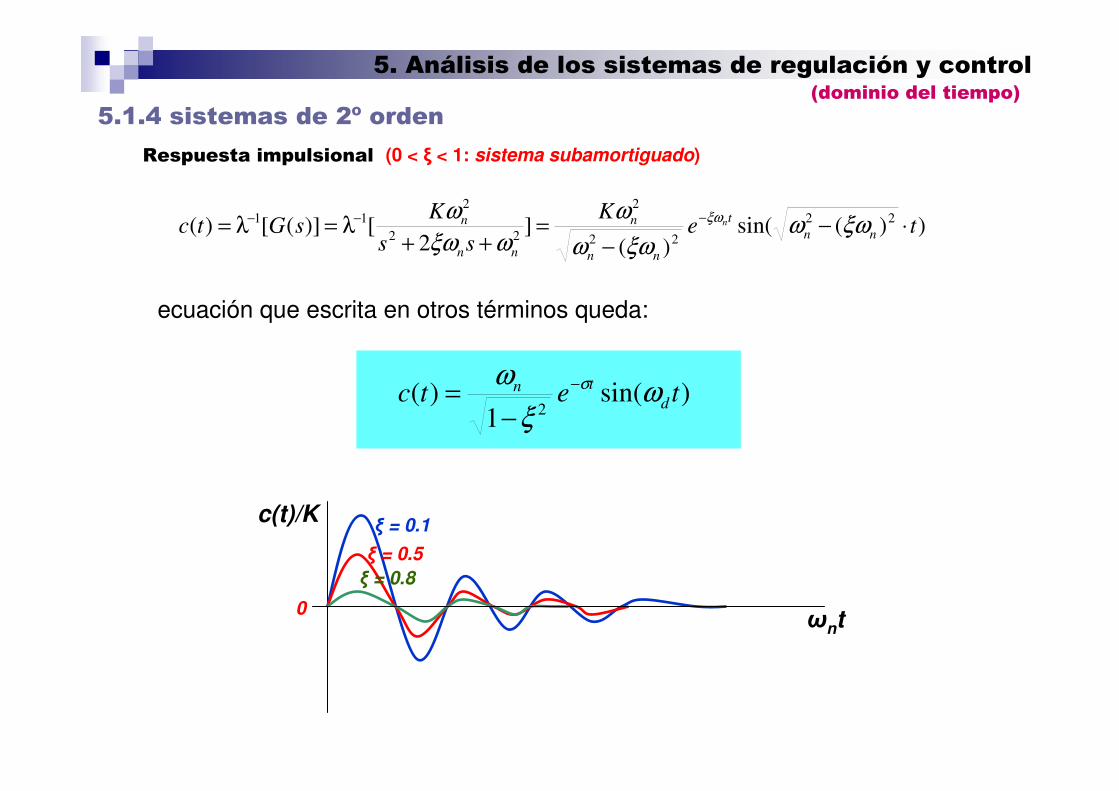
Respuesta impulsional (0 < ξ < 1: sistema subamortiguado)
)sin(1
)(2
tetc d
tn ωξ
ω σ−
−=
ecuación que escrita en otros términos queda:
))(sin()(
]2
[)]([)( 22
22
2
22
211
teK
ss
KsGtc nn
t
nn
n
nn
n n ⋅−−
=++
== −−− ξωωξωω
ω
ωξω
ω ξωλλ
c(t)/K
ωnt
ξ = 0.1
ξ = 0.5ξ = 0.8
0
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.4 sistemas de 2º orden
)])(
21([]
1
)2([)]()([)(
22
1
2
211
dn
n
nn
n
s
s
sK
sss
KsRsGtc
ωξω
ξω
ωξω
ω
++
+−=
++=⋅= −−− λλλ
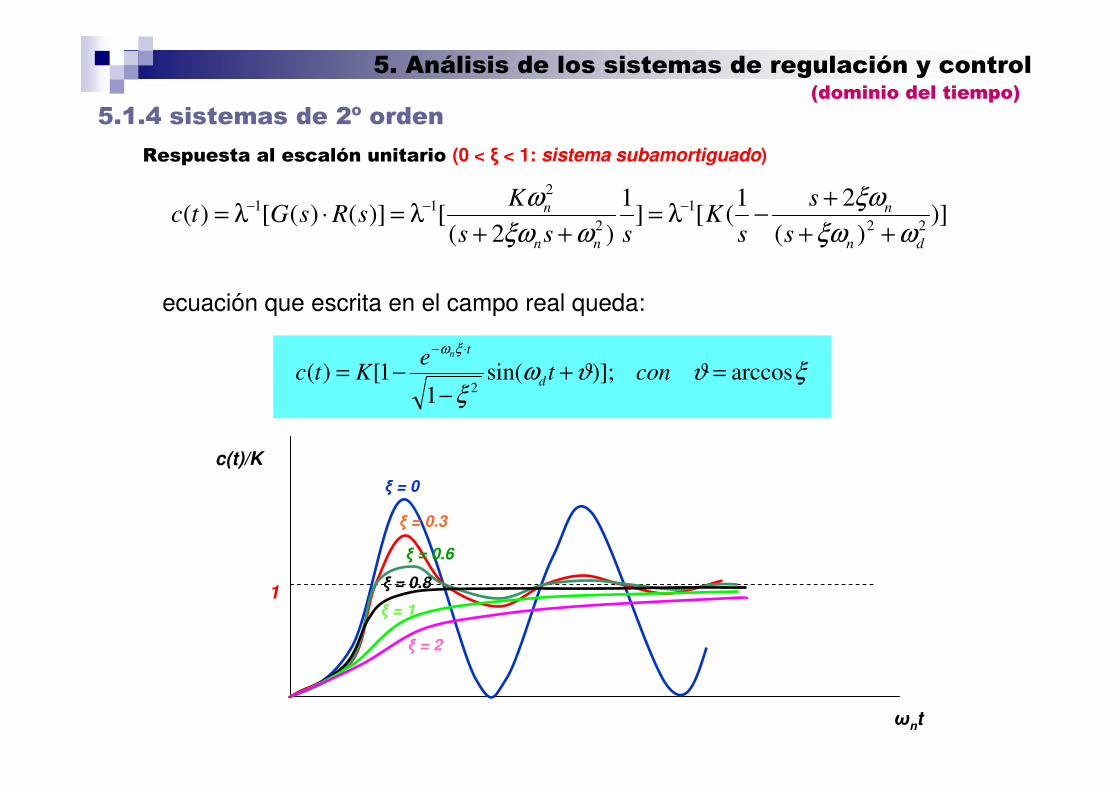
ecuación que escrita en el campo real queda:
ξϑϑωξ
ξω
arccos)];sin(1
1[)(2
=+−
−=⋅−
conte
Ktc d
tn
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.4 sistemas de 2º orden
Respuesta al escalón unitario (0 < ξ < 1: sistema subamortiguado)
c(t)/K
ωnt
1
ξ = 0
ξ = 0.3
ξ = 0.6
ξ = 0.8
ξ = 1
ξ = 2
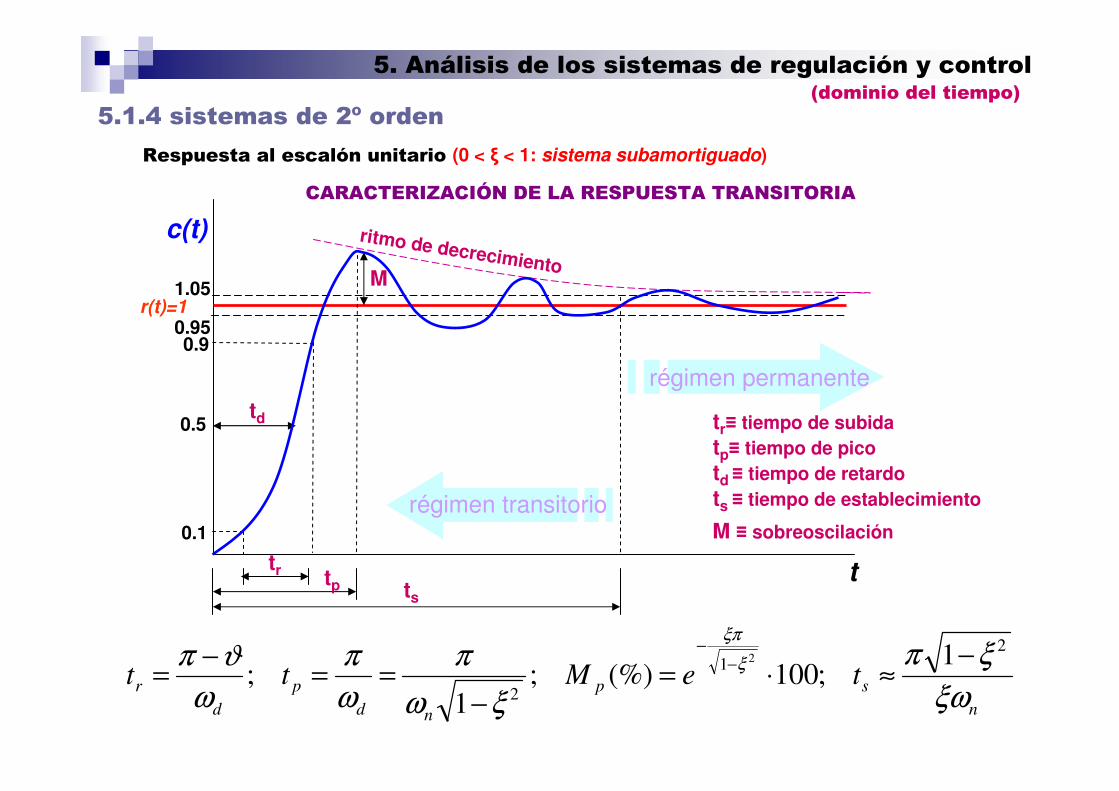
CARACTERIZACIÓN DE LA RESPUESTA TRANSITORIA
r(t)=1
c(t)
t
1.05
0.950.9
0.1
0.5
tr tp ts
td
ritmo de decrecimiento
tr≡ tiempo de subidatp≡ tiempo de picotd ≡ tiempo de retardots ≡ tiempo de establecimiento
M ≡ sobreoscilación
M
régimen permanente
régimen transitorio
n
sp
nd
p
d
r teMttξω
ξπ
ξω
π
ω
π
ω
ϑπ ξ
ξπ2
1
2
1;100(%);
1;
2 −≈⋅=
−==
−= −
−
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.4 sistemas de 2º orden
Respuesta al escalón unitario (0 < ξ < 1: sistema subamortiguado)
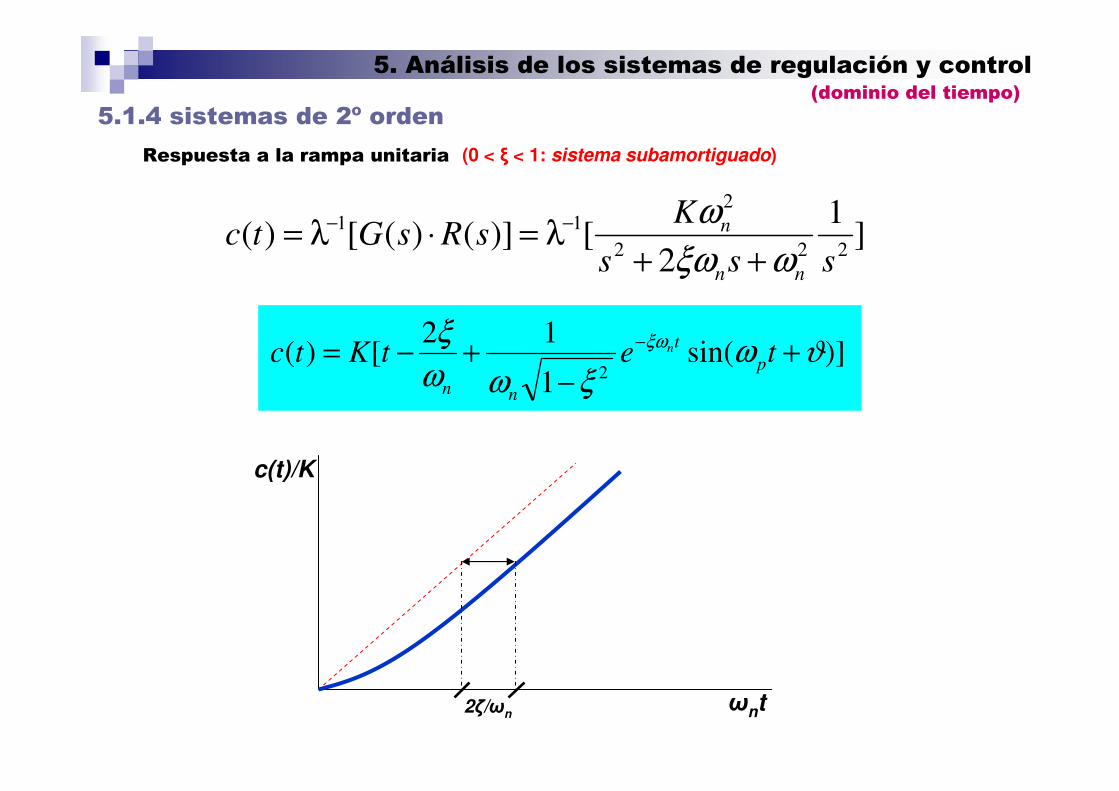
)]sin(1
12[)(
2ϑω
ξωω
ξ ξω +−
+−= −tetKtc p
t
nn
n
]1
2[)]()([)(
222
211
sss
KsRsGtc
nn
n
ωξω
ω
++=⋅= −− λλ
2ζ/ωn
c(t)/K
ωnt
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.4 sistemas de 2º orden
Respuesta a la rampa unitaria (0 < ξ < 1: sistema subamortiguado)
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.5 sistemas de orden superior
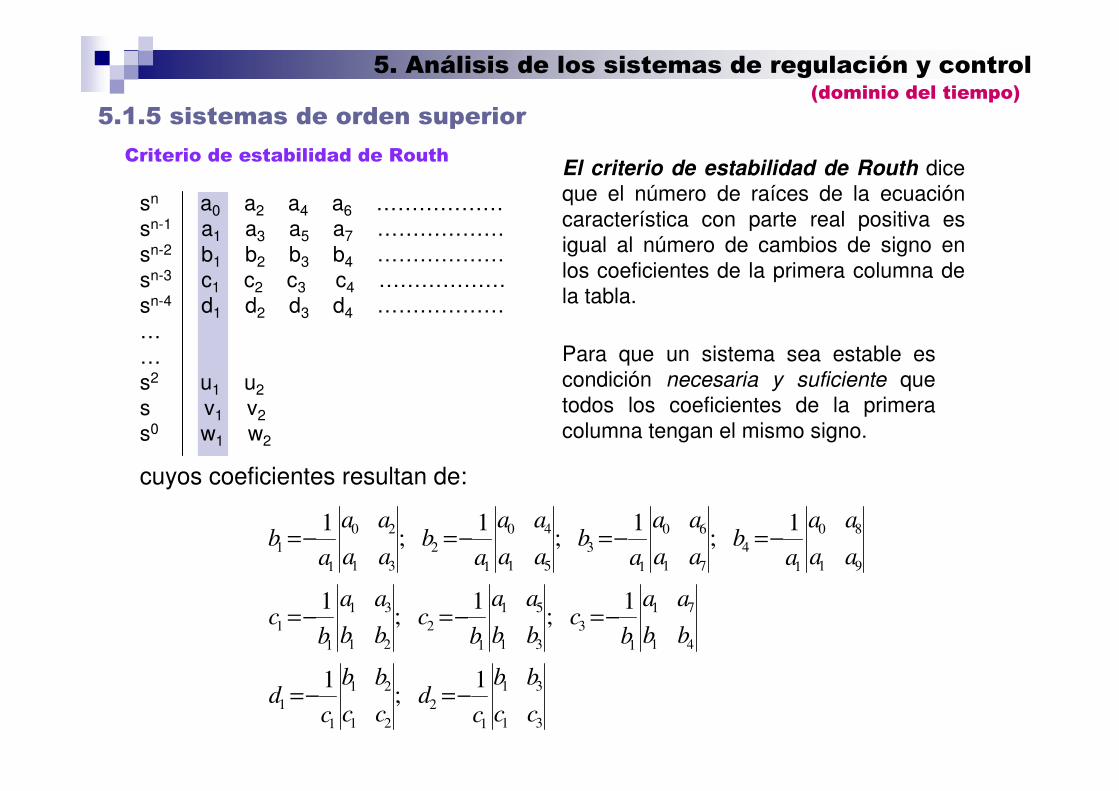
Criterio de estabilidad de Routh
sn a0 a2 a4 a6 ………………sn-1 a1 a3 a5 a7 ………………sn-2 b1 b2 b3 b4 ………………sn-3 c1 c2 c3 c4 ………………sn-4 d1 d2 d3 d4 ……………………s2 u1 u2s v1 v2s0 w1 w2
31
31
1
2
21
21
1
1
41
71
1
3
31
51
1
2
21
31
1
1
91
80
1
4
71
60
1
3
51
40
1
2
31
20
1
1
1;
1
1;
1;
1
1;
1;
1;
1
cc
bb
cd
cc
bb
cd
bb
aa
bc
bb
aa
bc
bb
aa
bc
aa
aa
ab
aa
aa
ab
aa
aa
ab
aa
aa
ab
−=−=
−=−=−=
−=−=−=−=
cuyos coeficientes resultan de:
El criterio de estabilidad de Routh dice que el número de raíces de la ecuación característica con parte real positiva es igual al número de cambios de signo en los coeficientes de la primera columna de la tabla.
Para que un sistema sea estable es condición necesaria y suficiente que todos los coeficientes de la primera columna tengan el mismo signo.
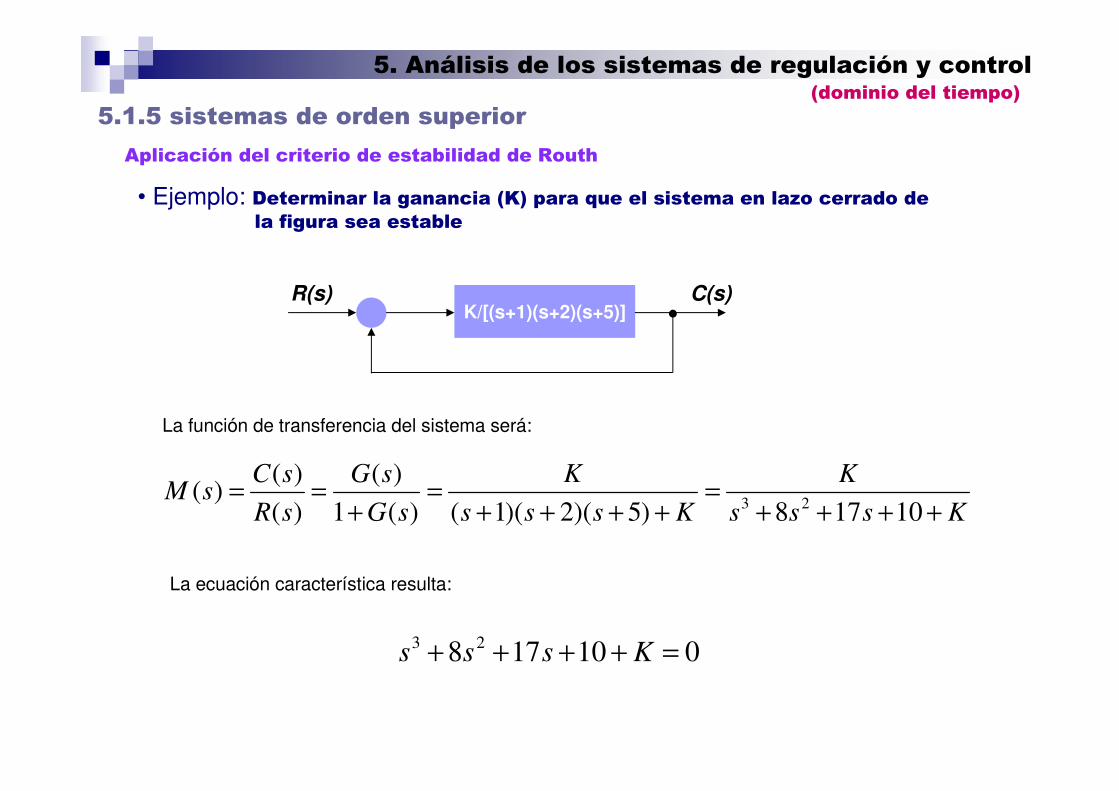
• Ejemplo: Determinar la ganancia (K) para que el sistema en lazo cerrado dela figura sea estable
K/[(s+1)(s+2)(s+5)]
La función de transferencia del sistema será:
R(s) C(s)
Ksss
K
Ksss
K
sG
sG
sR
sCsM
++++=
++++=
+==
10178)5)(2)(1()(1
)(
)(
)()(
23
La ecuación característica resulta:
010178 23 =++++ Ksss
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.5 sistemas de orden superior
Aplicación del criterio de estabilidad de Routh
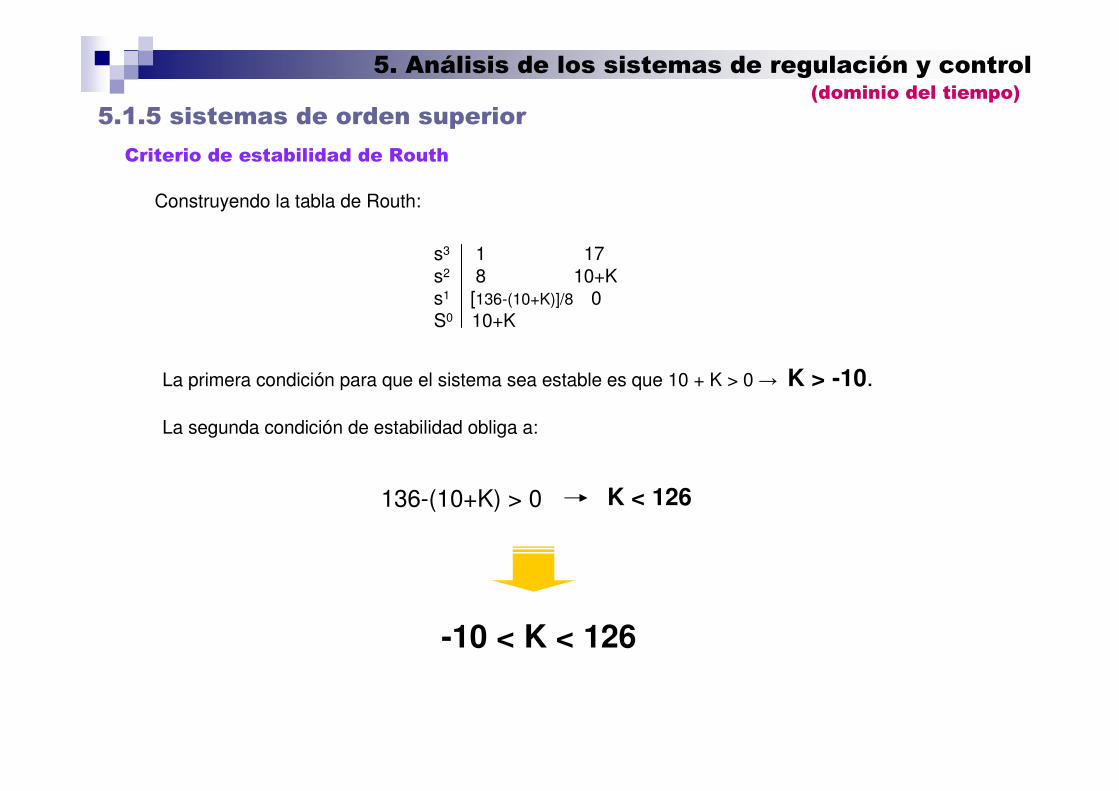
La primera condición para que el sistema sea estable es que 10 + K > 0 → K > -10.
Construyendo la tabla de Routh:
s3 1 17s2 8 10+K s1 [136-(10+K)]/8 0S0 10+K
136-(10+K) > 0 K < 126
-10 < K < 126
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.5 sistemas de orden superior
Criterio de estabilidad de Routh
La segunda condición de estabilidad obliga a:
Una vez conseguida la estabilidad del sistema, el fin principal que se persigue con el estudio de la respuesta en régimen permanente es determinar su comportamiento tras haber transcurrido un largo período de tiempo después de la aplicación de una señal de excitación.
El análisis en régimen permanente es de gran interés puesto que facilita mucha información sobre la capacidad del sistema a la hora de seguir las señales de mando o consigna que le son dadas, esto es, información sobre su precisión.
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.6 análisis de la respuesta en régimen permanente: análisis delerror
La precisión de un sistema de regulación automático se expresa normalmente en términos de error de la respuesta del mismo en régimen permanente, para unas señales de entrada específicas.
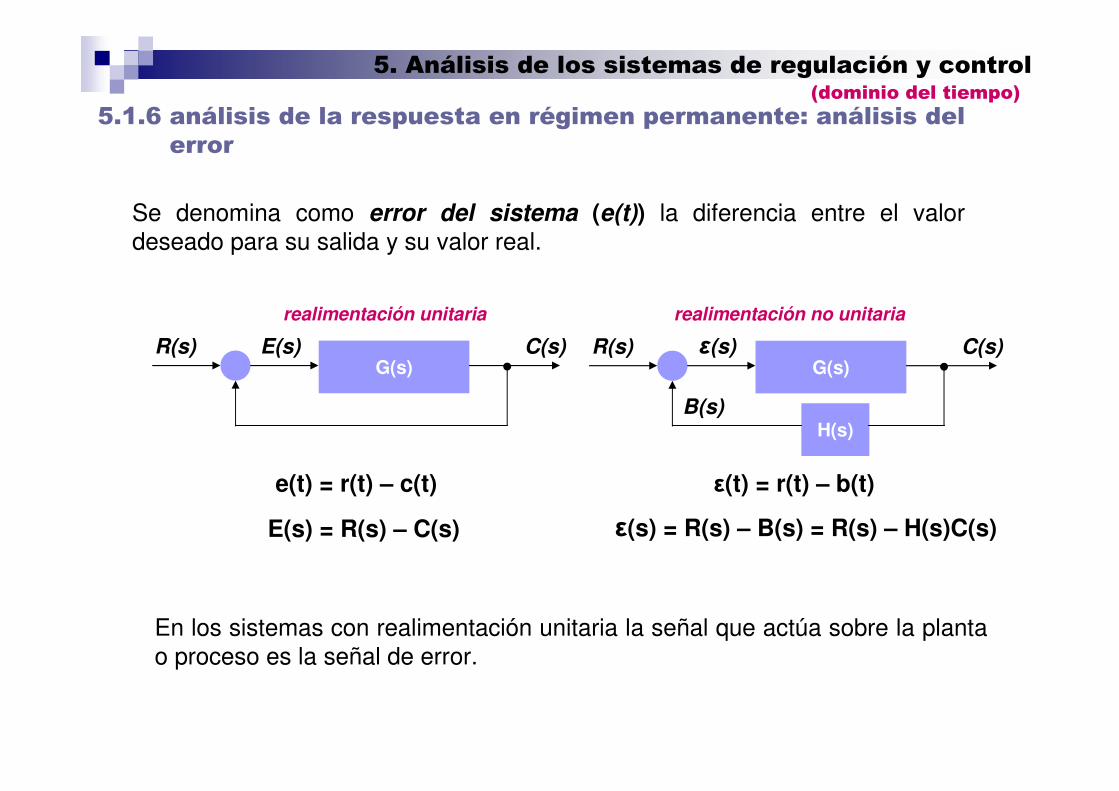
Se denomina como error del sistema (e(t)) la diferencia entre el valor deseado para su salida y su valor real.
G(s)R(s) C(s)
G(s)R(s) C(s)
H(s)
E(s) ε(s)
B(s)
realimentación unitaria realimentación no unitaria
e(t) = r(t) – c(t)
E(s) = R(s) – C(s)
ε(t) = r(t) – b(t)
ε(s) = R(s) – B(s) = R(s) – H(s)C(s)
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.6 análisis de la respuesta en régimen permanente: análisis delerror
En los sistemas con realimentación unitaria la señal que actúa sobre la planta o proceso es la señal de error.
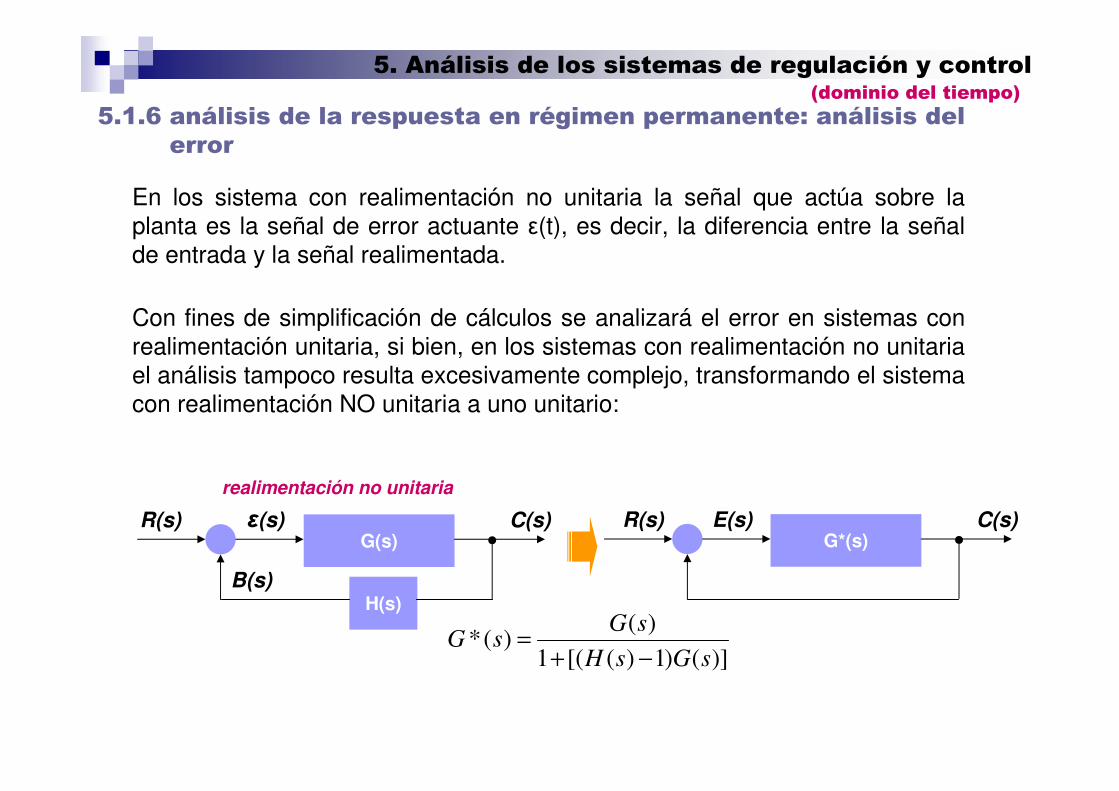
En los sistema con realimentación no unitaria la señal que actúa sobre la planta es la señal de error actuante ε(t), es decir, la diferencia entre la señal de entrada y la señal realimentada.
Con fines de simplificación de cálculos se analizará el error en sistemas con realimentación unitaria, si bien, en los sistemas con realimentación no unitaria el análisis tampoco resulta excesivamente complejo, transformando el sistema con realimentación NO unitaria a uno unitario:
G(s)R(s) C(s)
H(s)
ε(s)
B(s)
realimentación no unitaria
G*(s)R(s) C(s)E(s)
)]()1)([(1
)()(*
sGsH
sGsG
−+=
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.6 análisis de la respuesta en régimen permanente: análisis delerror
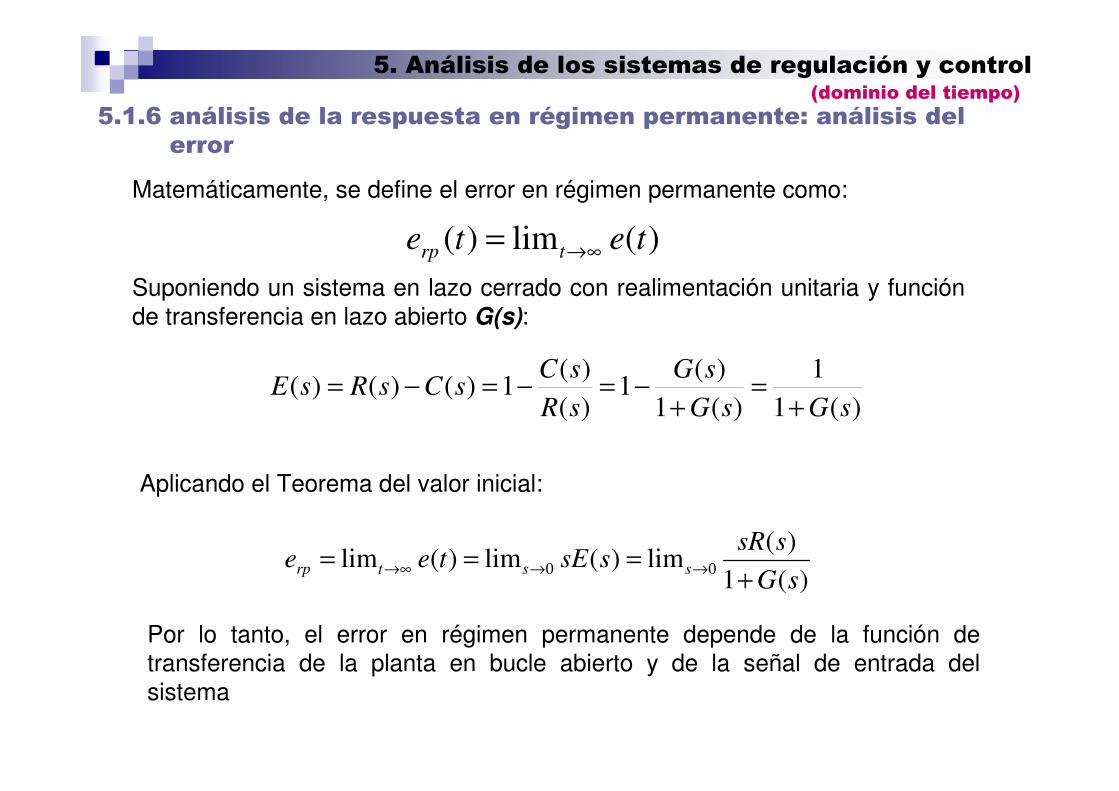
Matemáticamente, se define el error en régimen permanente como:
)(lim)( tete trp ∞→=
)(1
1
)(1
)(1
)(
)(1)()()(
sGsG
sG
sR
sCsCsRsE
+=
+−=−=−=
Aplicando el Teorema del valor inicial:
)(1
)(lim)(lim)(lim 00
sG
ssRssEtee sstrp
+=== →→∞→
Por lo tanto, el error en régimen permanente depende de la función de transferencia de la planta en bucle abierto y de la señal de entrada del sistema
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.6 análisis de la respuesta en régimen permanente: análisis delerror
Suponiendo un sistema en lazo cerrado con realimentación unitaria y función de transferencia en lazo abierto G(s):
Las tres señales normalizadas utilizadas para el análisis de error son:
escalón unitario: r(t) = 1rampa unitaria: r(t) = tparábola: r(t) = (1/2)t2
La entrada escalón también se denomina escalón de posición y se utiliza para saber como se comporta el sistema en régimen permanente ante una señal constante en el tiempo.
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.6 análisis de la respuesta en régimen permanente: análisis delerror
El tratamiento del análisis del error frente a las tres señales es idéntico, por lo que únicamente se analizará la entrada de tipo escalón unitario.El análisis del error de un sistema frente a una entrada de tipo escalón se denomina análisis del error de posición y se utiliza para saber como se comporta el sistema en régimen permanente ante una señal constante en el tiempo.
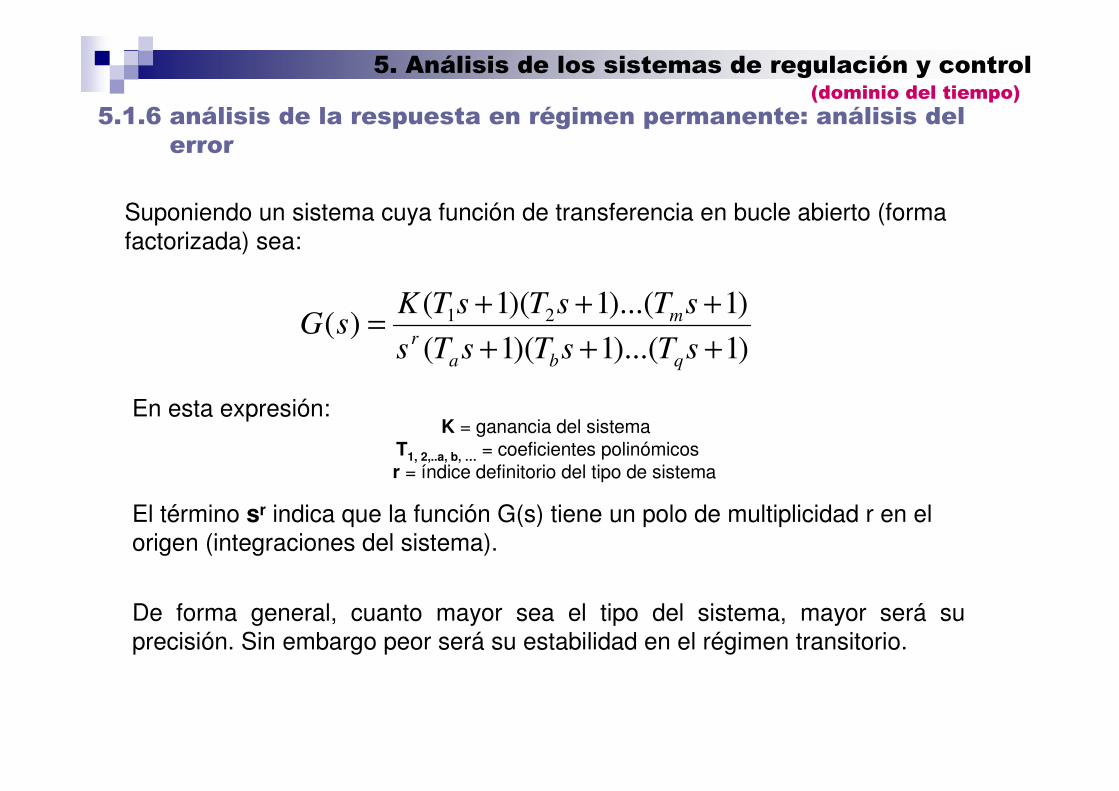
Suponiendo un sistema cuya función de transferencia en bucle abierto (forma factorizada) sea:
)1)...(1)(1(
)1)...(1)(1()( 21
+++
+++=
sTsTsTs
sTsTsTKsG
qba
r
m
En esta expresión:K = ganancia del sistema
T1, 2,..a, b, … = coeficientes polinómicosr = índice definitorio del tipo de sistema
El término sr indica que la función G(s) tiene un polo de multiplicidad r en el origen (integraciones del sistema).
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.6 análisis de la respuesta en régimen permanente: análisis delerror
De forma general, cuanto mayor sea el tipo del sistema, mayor será su precisión. Sin embargo peor será su estabilidad en el régimen transitorio.
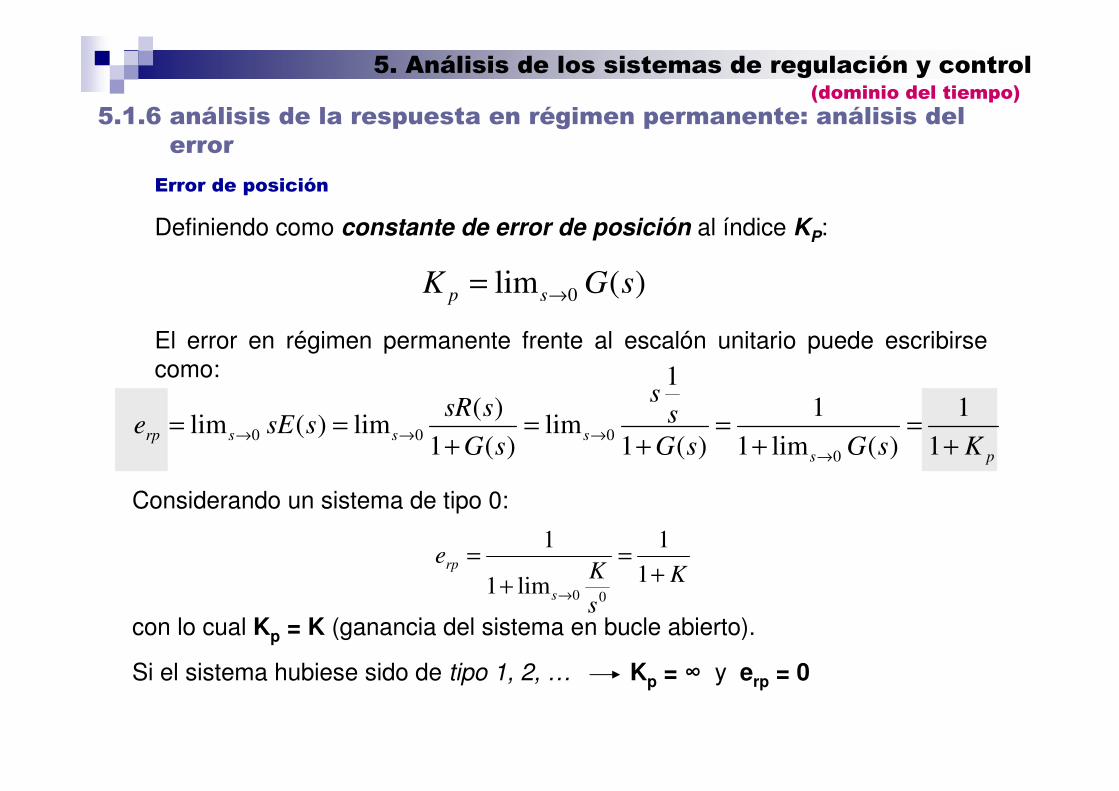
Definiendo como constante de error de posición al índice KP:
)(lim 0 sGK sp →=
El error en régimen permanente frente al escalón unitario puede escribirse como:
ps
sssrpKsGsG
ss
sG
ssRssEe
+=
+=
+=
+==
→
→→→1
1
)(lim1
1
)(1
1
lim)(1
)(lim)(lim
0
000
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.1.6 análisis de la respuesta en régimen permanente: análisis delerror
Error de posición
Considerando un sistema de tipo 0:
con lo cual Kp = K (ganancia del sistema en bucle abierto).
K
s
Ke
s
rp+
=
+
=
→
1
1
lim1
1
00
Si el sistema hubiese sido de tipo 1, 2, … Kp = ∞ y erp = 0
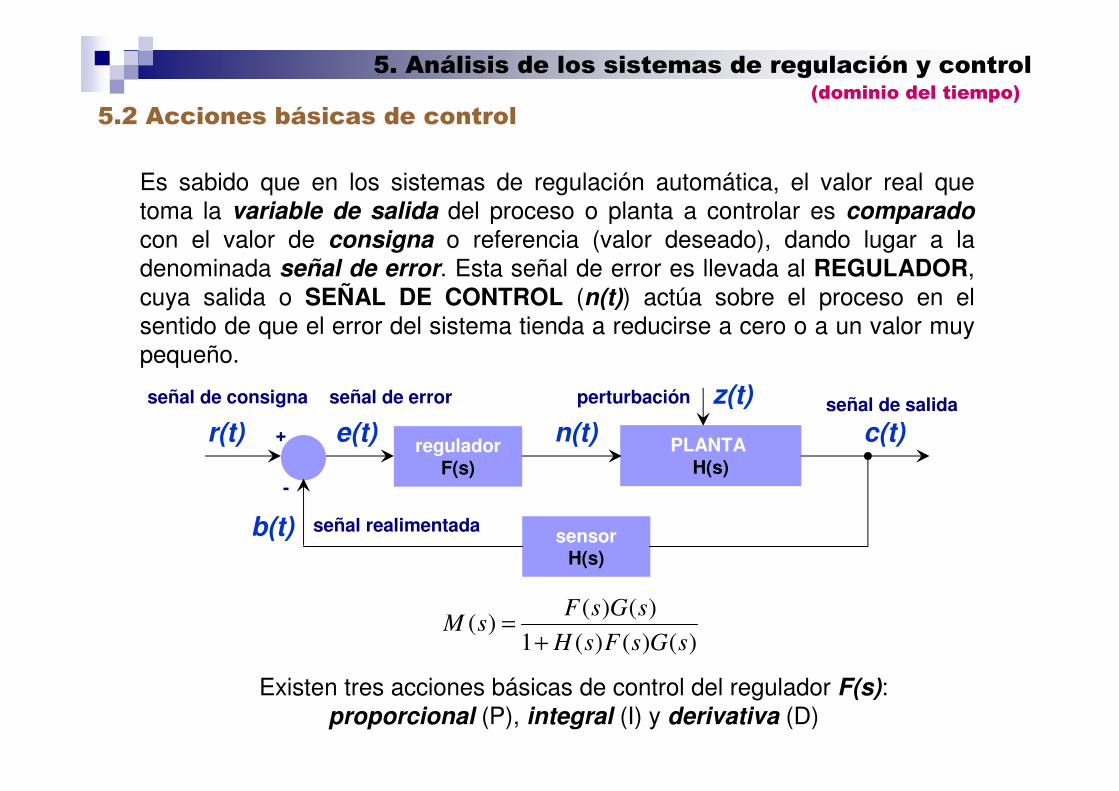
Es sabido que en los sistemas de regulación automática, el valor real que toma la variable de salida del proceso o planta a controlar es comparadocon el valor de consigna o referencia (valor deseado), dando lugar a la denominada señal de error. Esta señal de error es llevada al REGULADOR, cuya salida o SEÑAL DE CONTROL (n(t)) actúa sobre el proceso en el sentido de que el error del sistema tienda a reducirse a cero o a un valor muy pequeño.
reguladorF(s)
PLANTA H(s)
r(t) c(t)señal de consigna señal de salidaz(t)perturbación
e(t)
sensorH(s)
+
-
b(t)
señal de error
señal realimentada
n(t)
)()()(1
)()()(
sGsFsH
sGsFsM
+=
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.2 Acciones básicas de control
Existen tres acciones básicas de control del regulador F(s):proporcional (P), integral (I) y derivativa (D)
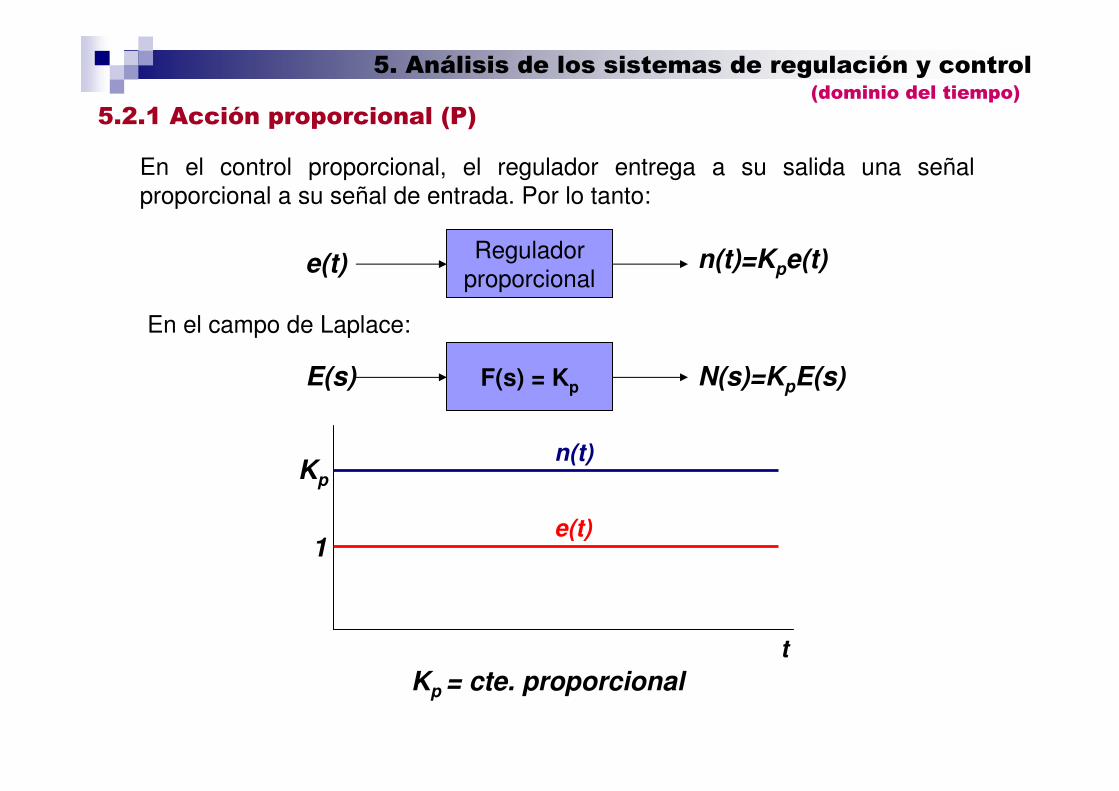
En el control proporcional, el regulador entrega a su salida una señal proporcional a su señal de entrada. Por lo tanto:
Reguladorproporcional
e(t) n(t)=Kpe(t)
F(s) = KpE(s) N(s)=KpE(s)
En el campo de Laplace:
t
n(t)
e(t)1
Kp
Kp = cte. proporcional
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.2.1 Acción proporcional (P)
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
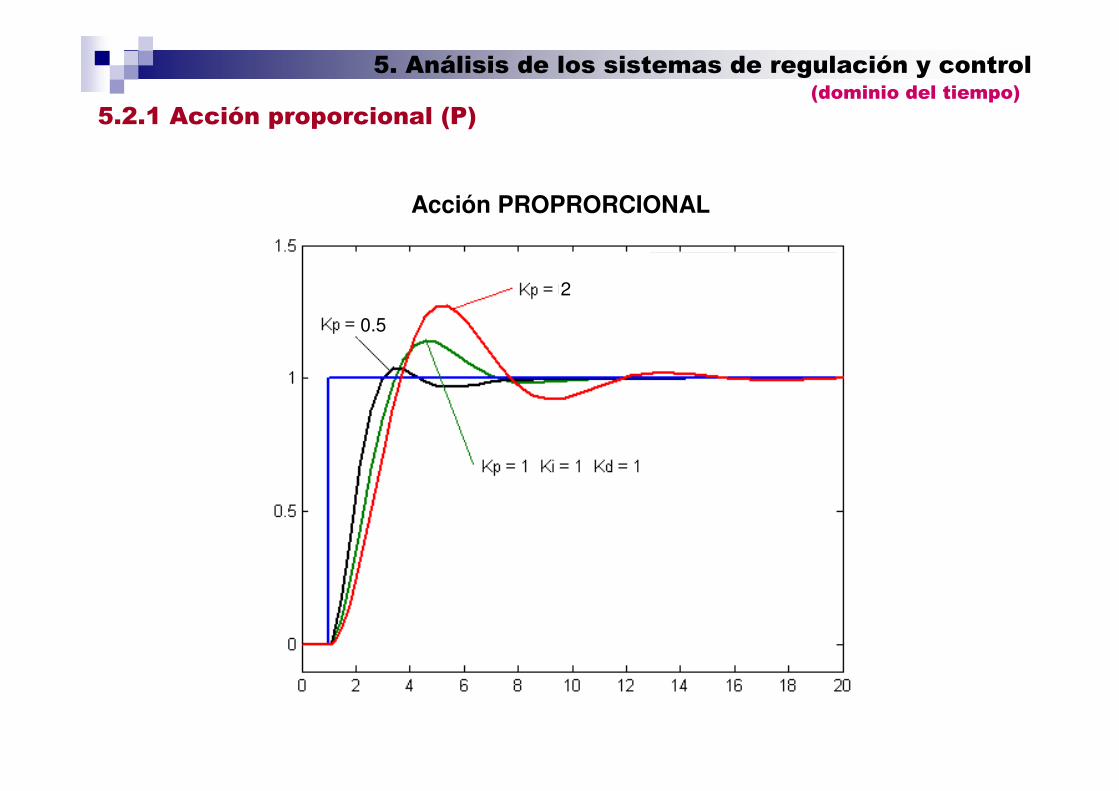
5.2.1 Acción proporcional (P)
Acción PROPRORCIONAL
2
0.5
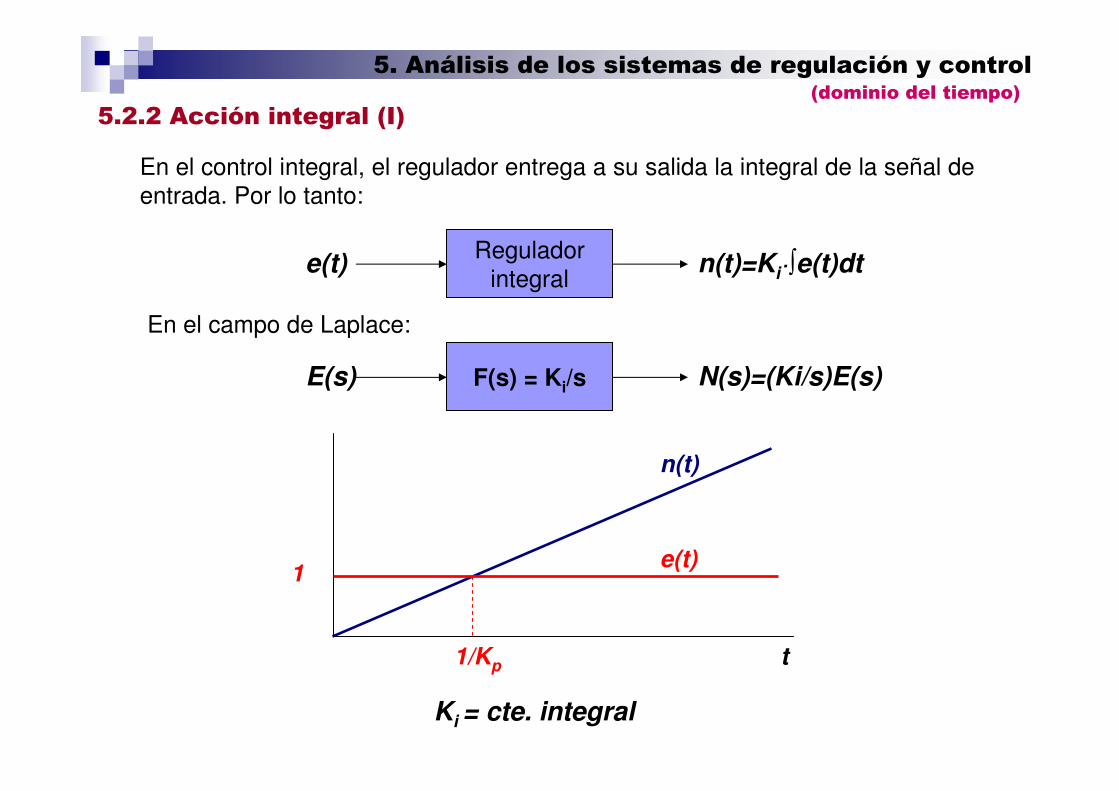
En el control integral, el regulador entrega a su salida la integral de la señal de entrada. Por lo tanto:
Reguladorintegral
e(t) n(t)=Ki·∫e(t)dt
F(s) = Ki/sE(s) N(s)=(Ki/s)E(s)
En el campo de Laplace:
t
n(t)
e(t)
Ki = cte. integral
1
1/Kp
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.2.2 Acción integral (I)
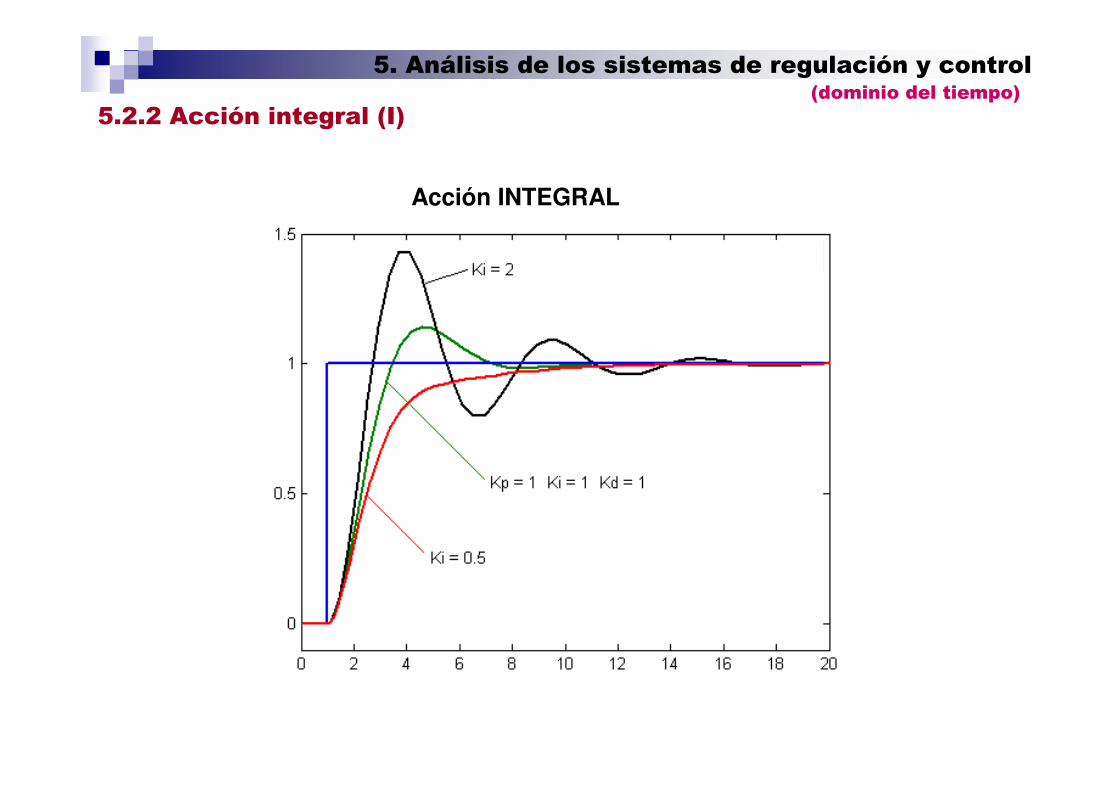
Acción INTEGRAL
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.2.2 Acción integral (I)
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.2.3 Acción derivativa (D)
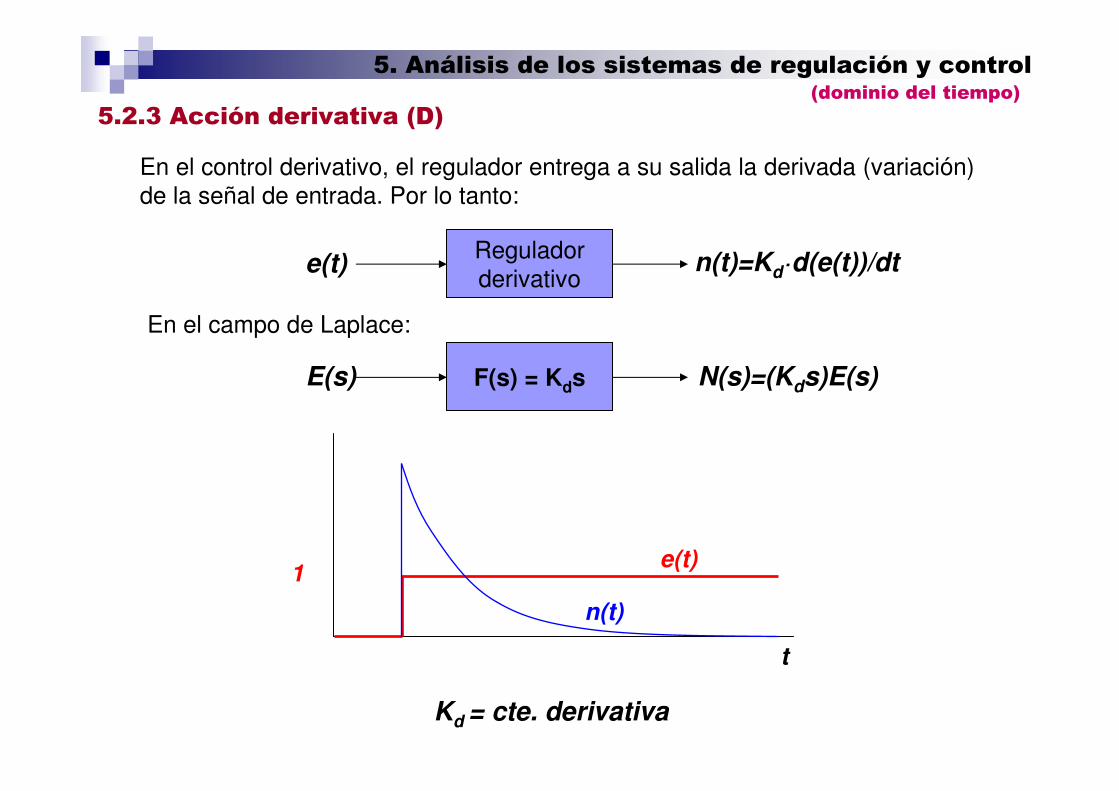
En el control derivativo, el regulador entrega a su salida la derivada (variación) de la señal de entrada. Por lo tanto:
Reguladorderivativo
e(t)
F(s) = KdsE(s) N(s)=(Kds)E(s)
En el campo de Laplace:
t
n(t)
e(t)
Kd = cte. derivativa
1
n(t)=Kd·d(e(t))/dt
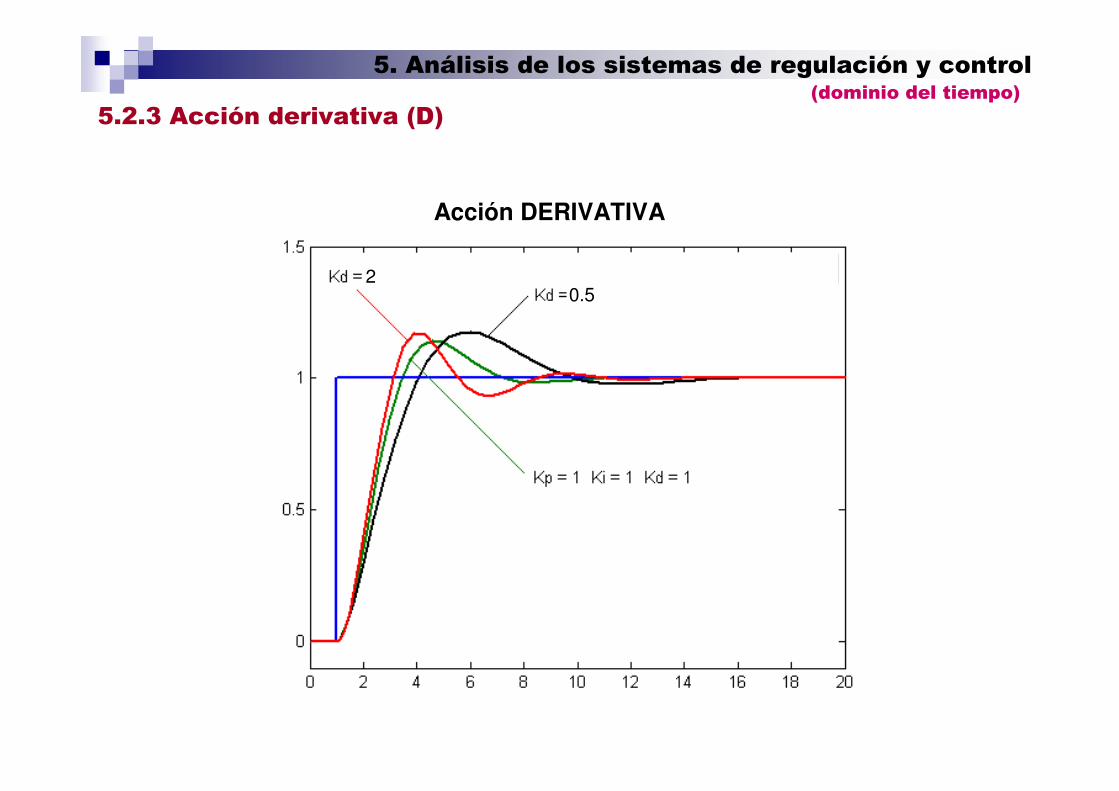
Acción DERIVATIVA
5. Análisis de los sistemas de regulación y control(dominio del tiempo)
5.2.3 Acción derivativa (D)
2 0.5
SISTEMAS DE CONTROL
Análisis en Frecuencia
Master universitario en energías y combustibles para el futuro
Julio Bodega
José Gorjón
ANÁLISIS EN FRECUENCIA
ÍNDICE
1. Respuesta en frecuencia - Formas de representación.
2. Criterio de Nyquist - Gráficas de Nyquist.
3. Estabilidad - Márgenes de fase y ganancia.
4. Criterio de Bode - Gráficas de Bode.
ANÁLISIS EN FRECUENCIA
Introducción
ANÁLISIS EN FRECUENCIA
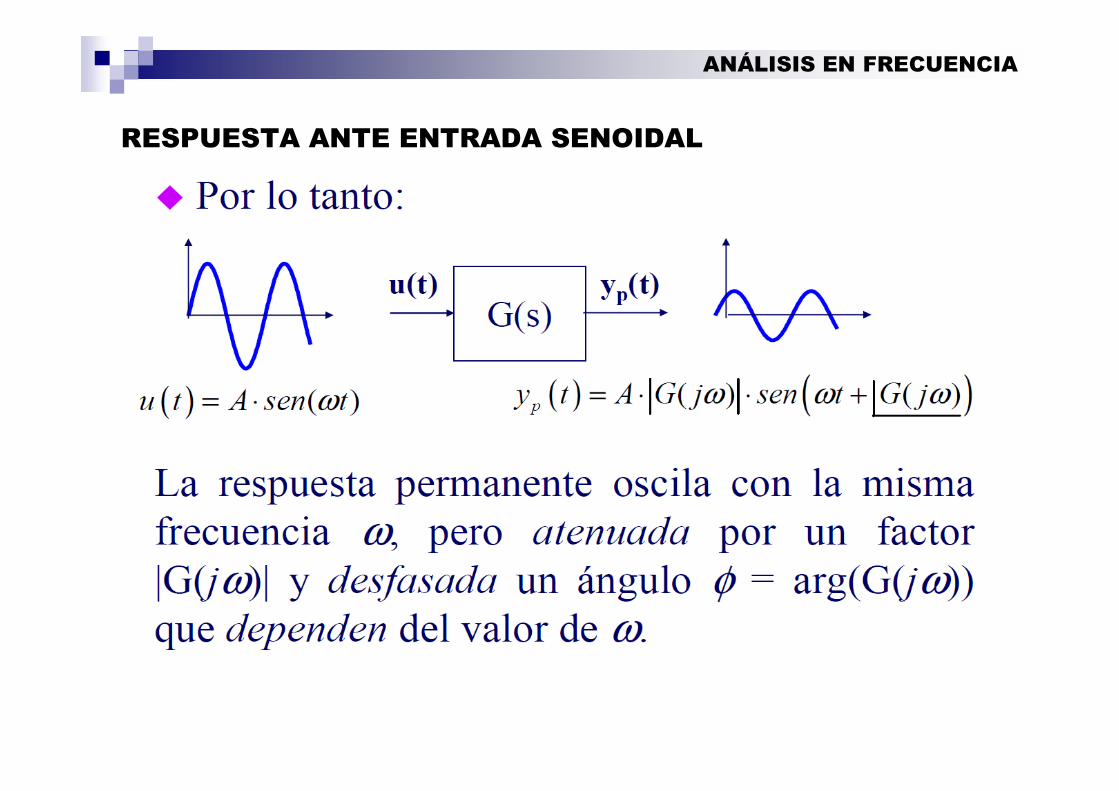
RESPUESTA ANTE ENTRADA SENOIDAL
ANÁLISIS EN FRECUENCIA
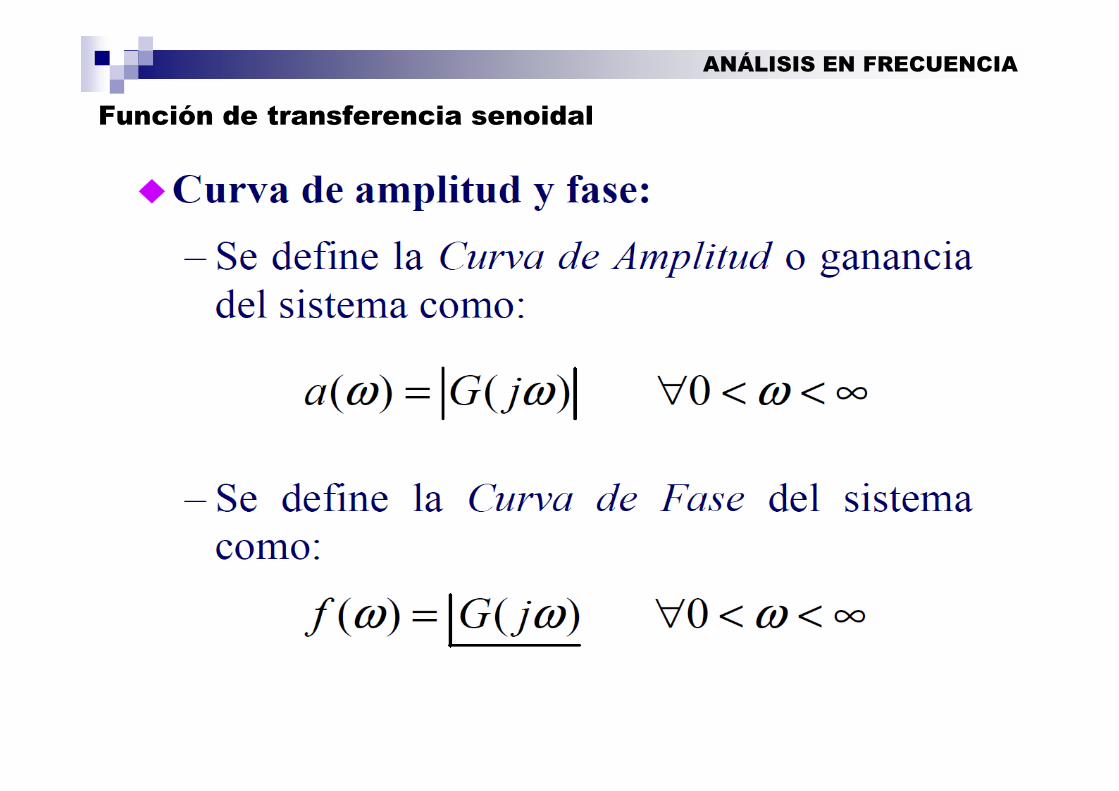
Función de transferencia senoidal
ANÁLISIS EN FRECUENCIA
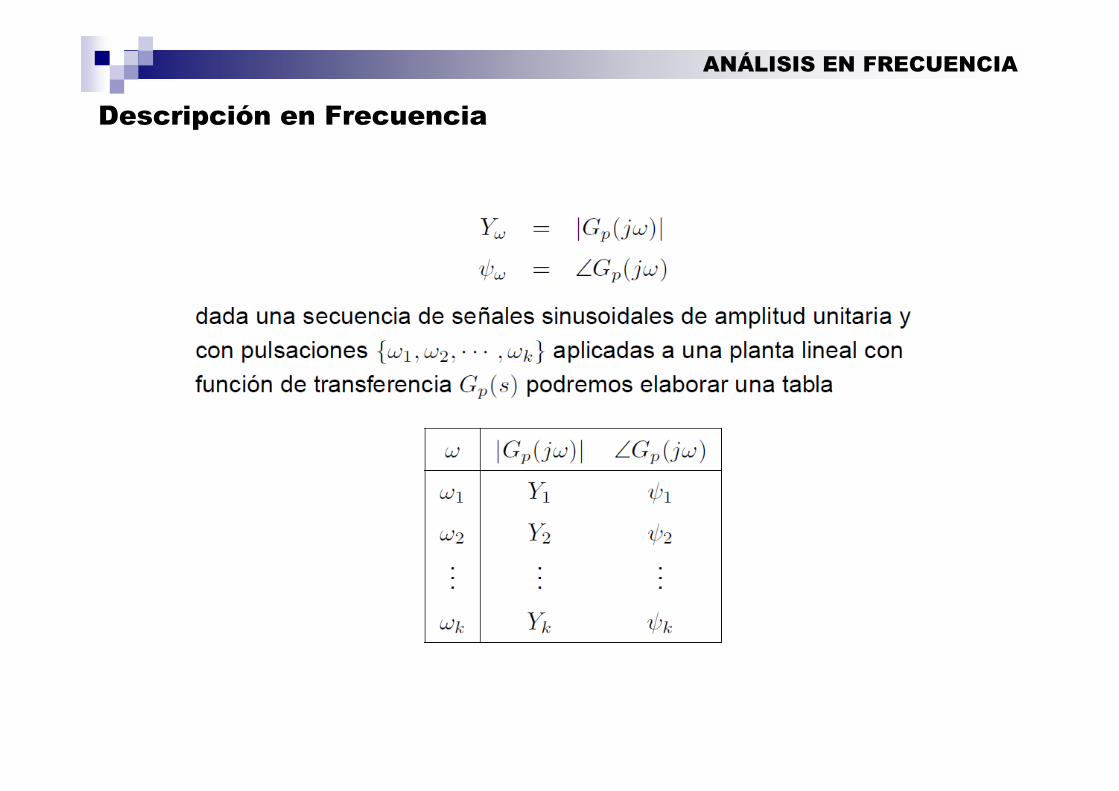
Descripción en Frecuencia
ANÁLISIS EN FRECUENCIA
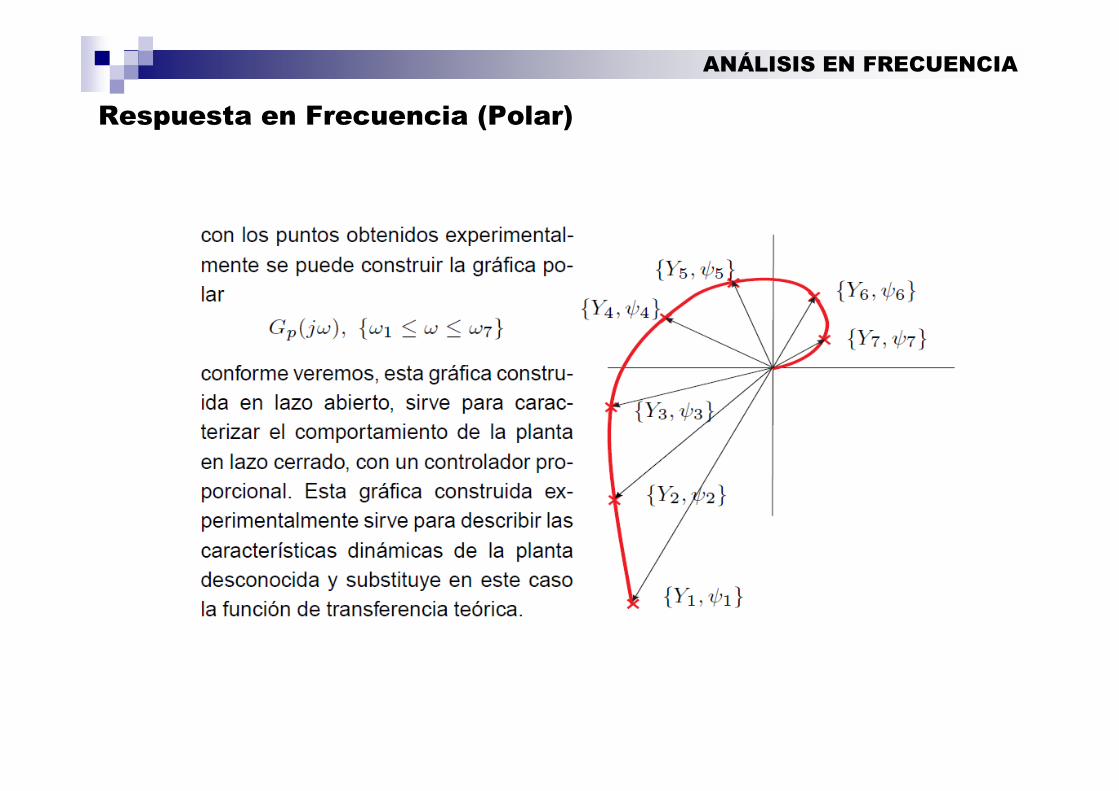
Respuesta en Frecuencia (Polar)
ANÁLISIS EN FRECUENCIA
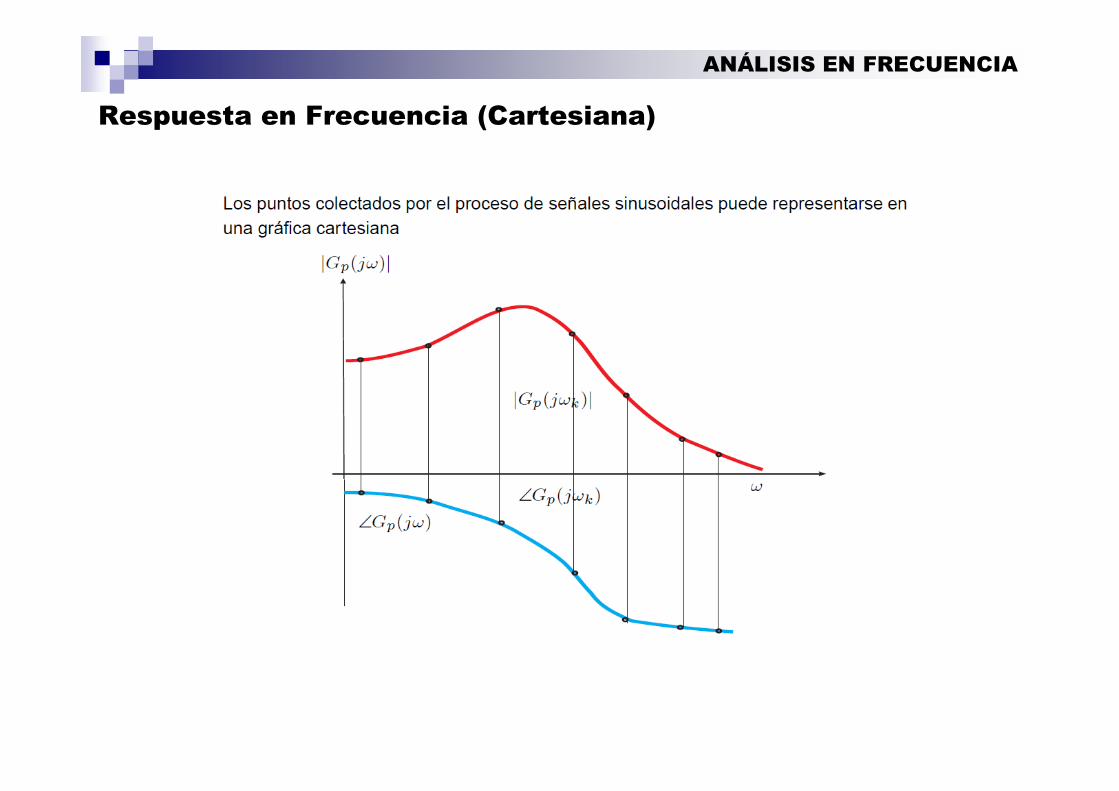
Respuesta en Frecuencia (Cartesiana)
ANÁLISIS EN FRECUENCIA
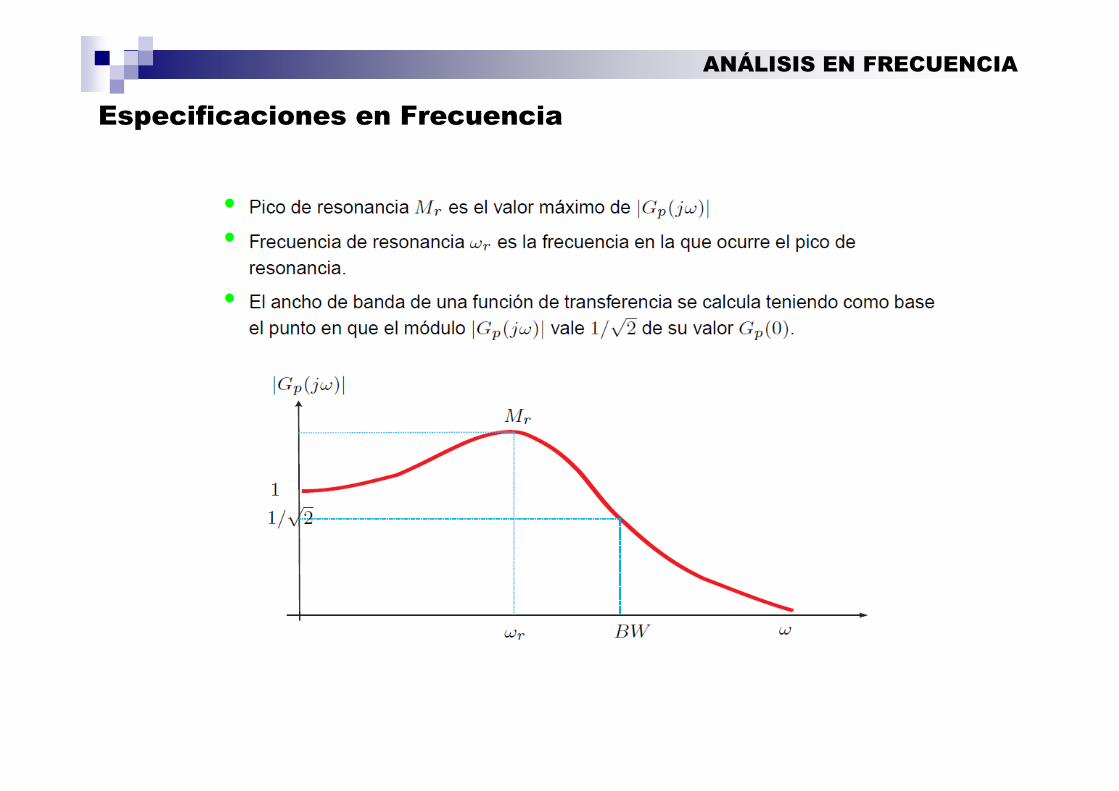
Especificaciones en Frecuencia
ANÁLISIS EN FRECUENCIA
Harry Nyquist 1889-1976
Nació en Suecia emigrando para los
Estados Unidos de America. Trabajóen la explicación cuantitativa del ruido
térmico en las comunicaciones,
inventó el sistema de transmisión de
banda lateral vestigial (TV). Quedócélebre por su famoso diagrama de
estabilidad.
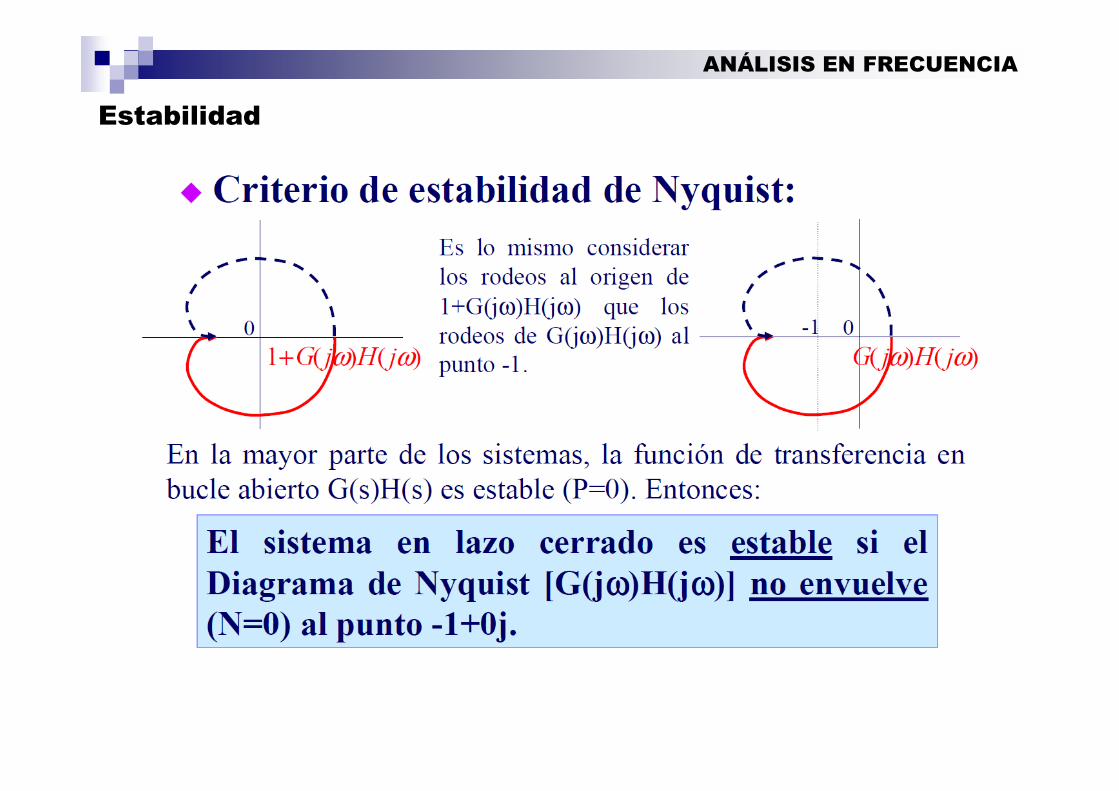
ANÁLISIS EN FRECUENCIA
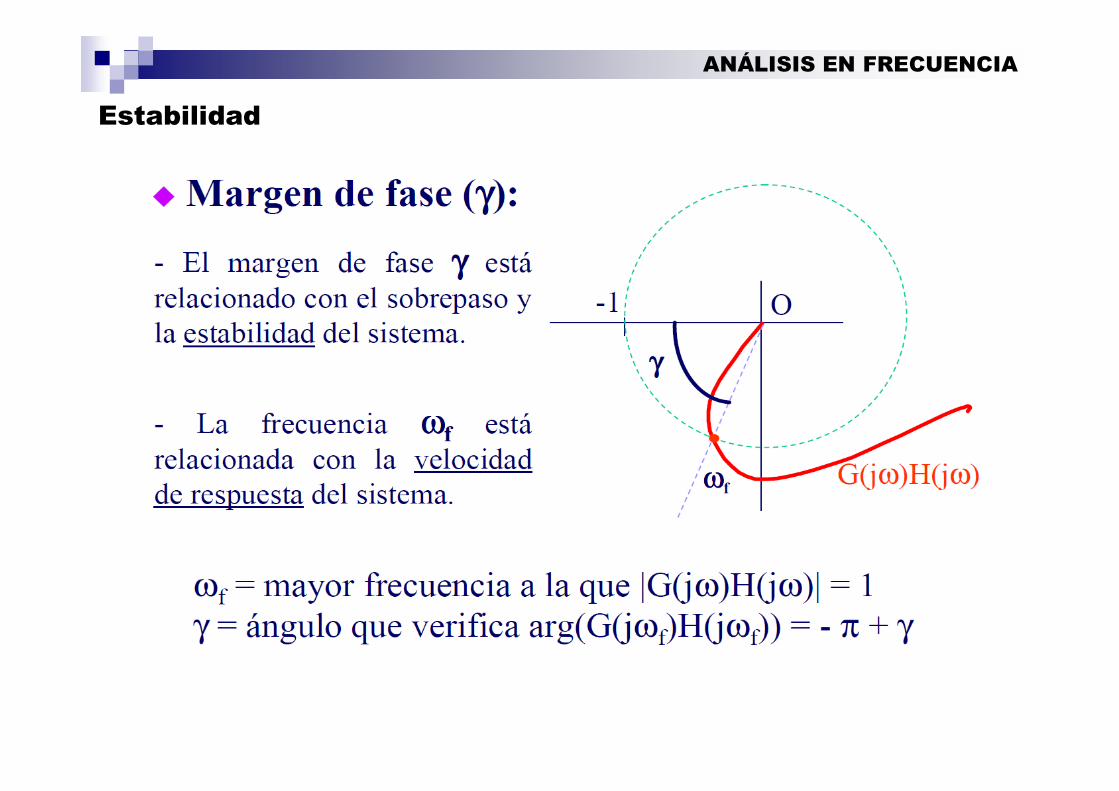
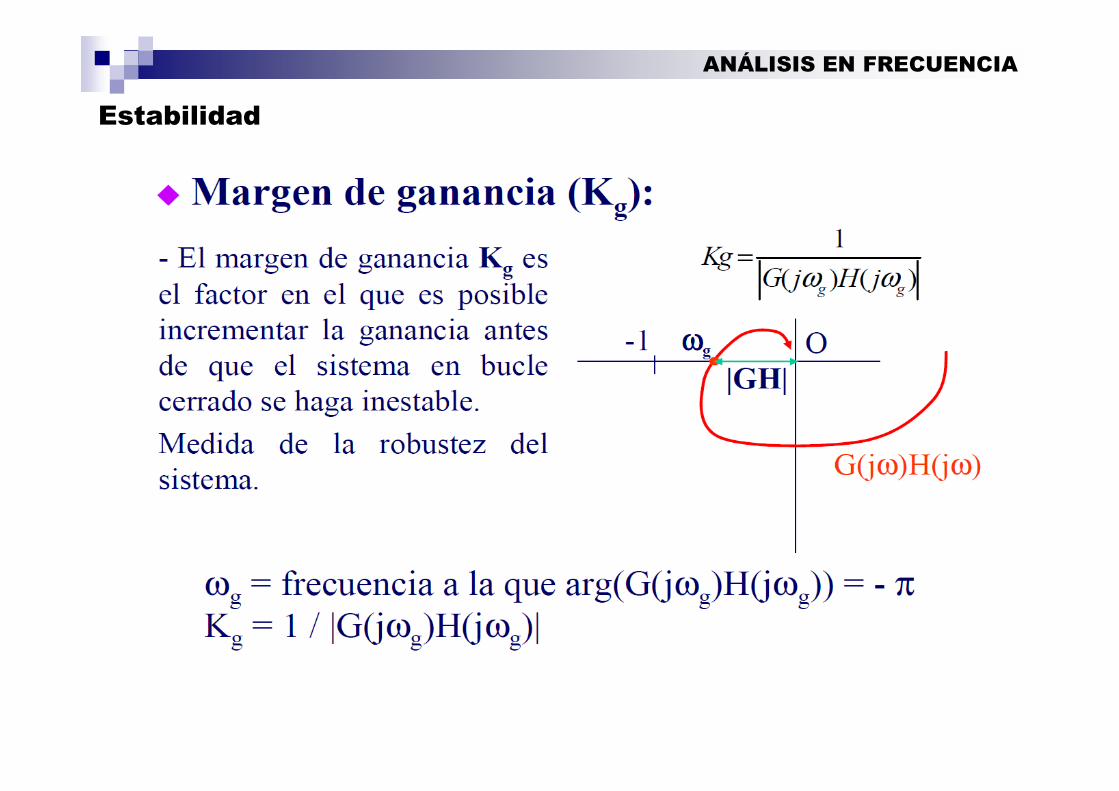
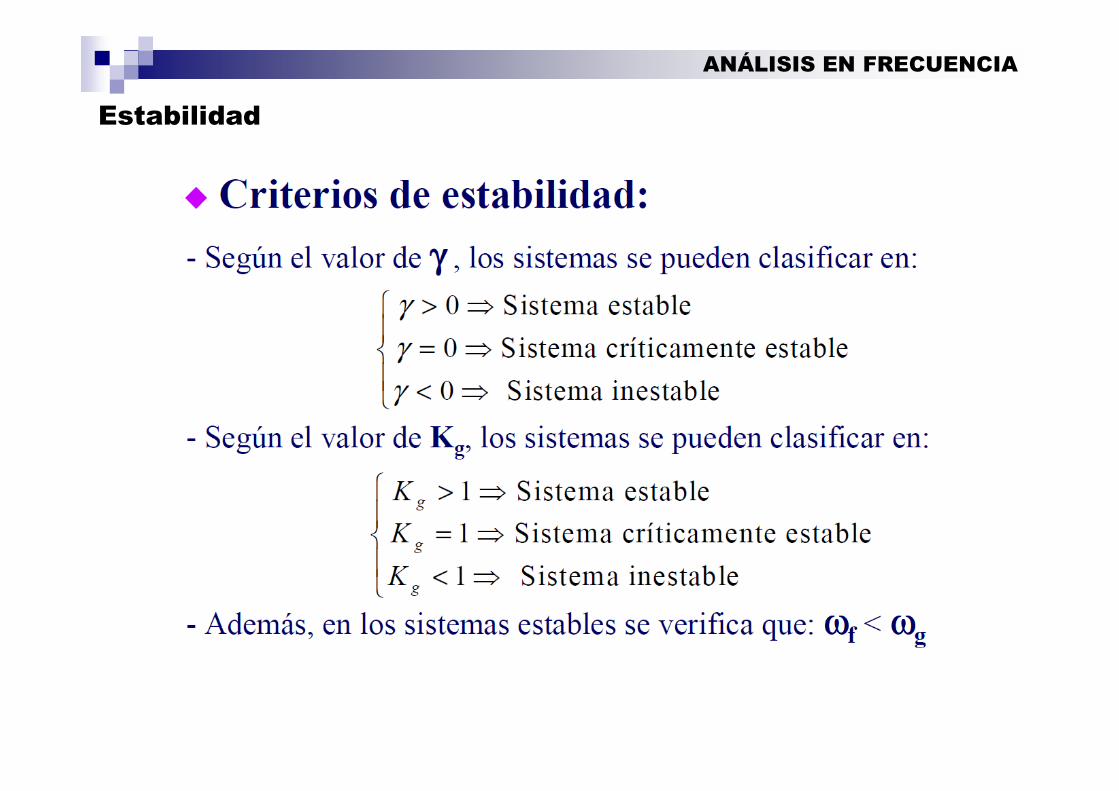
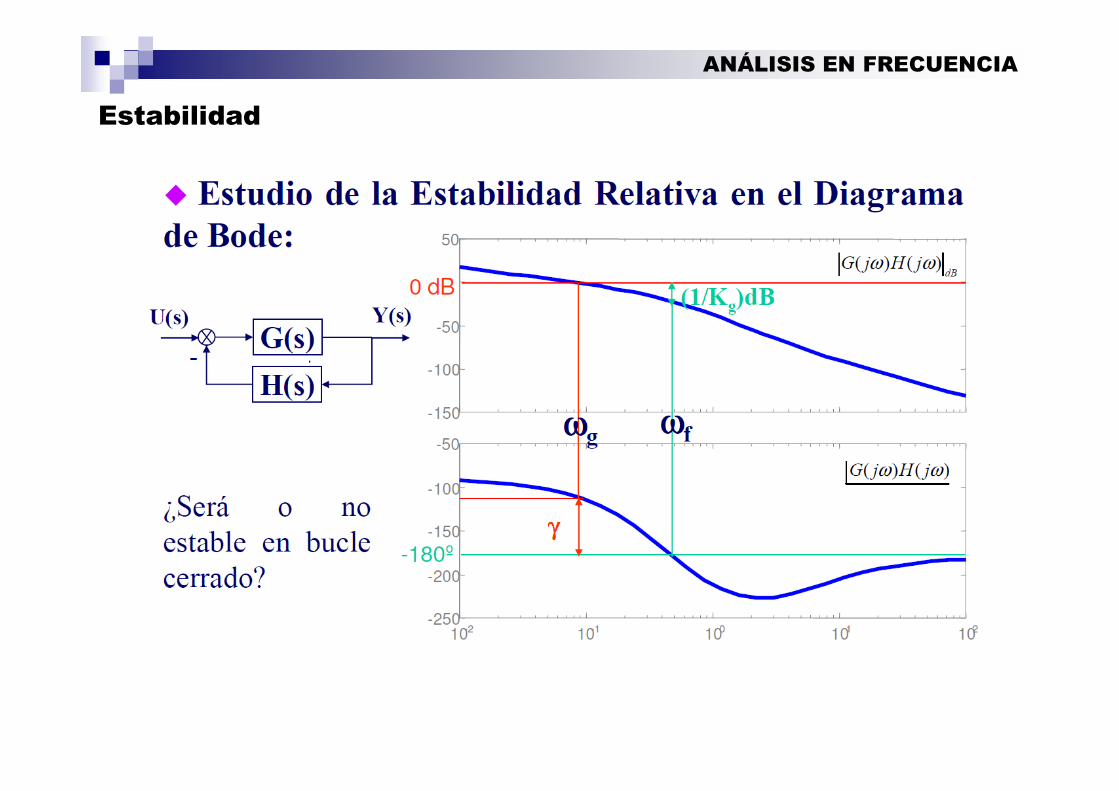
Estabilidad
ANÁLISIS EN FRECUENCIA
Estabilidad relativa - Márgenes
ANÁLISIS EN FRECUENCIA
Estabilidad
ANÁLISIS EN FRECUENCIA
Estabilidad
ANÁLISIS EN FRECUENCIA
Estabilidad
ANÁLISIS EN FRECUENCIA
Hendrik Wade Bode 1905-1982
Natural de Estados Unidos de América, trabajó en filtros eléctricos siendo hoy considerada clásica su obra Network
Analysis and Feedback Amplifier
Design. Trabajó posteriormente durante
la 2ª guerra mundial en sistemas balísticos de misiles y comunicaciones
en general.
ANÁLISIS EN FRECUENCIA
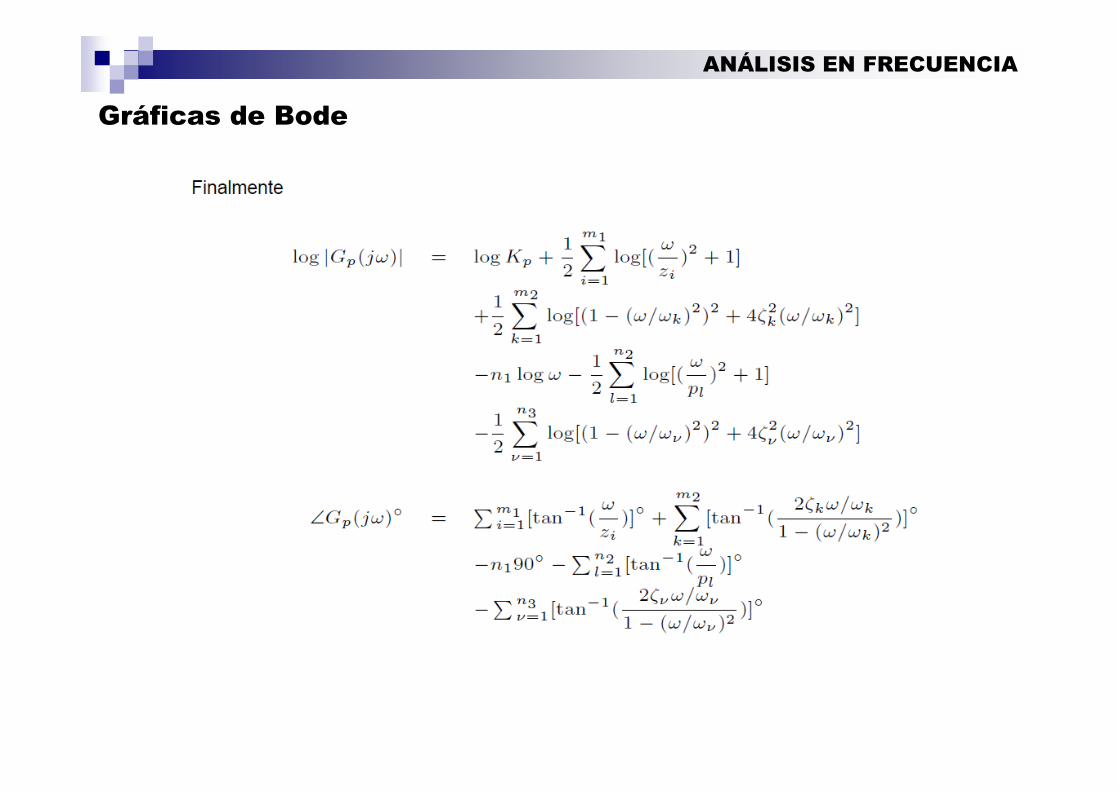
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
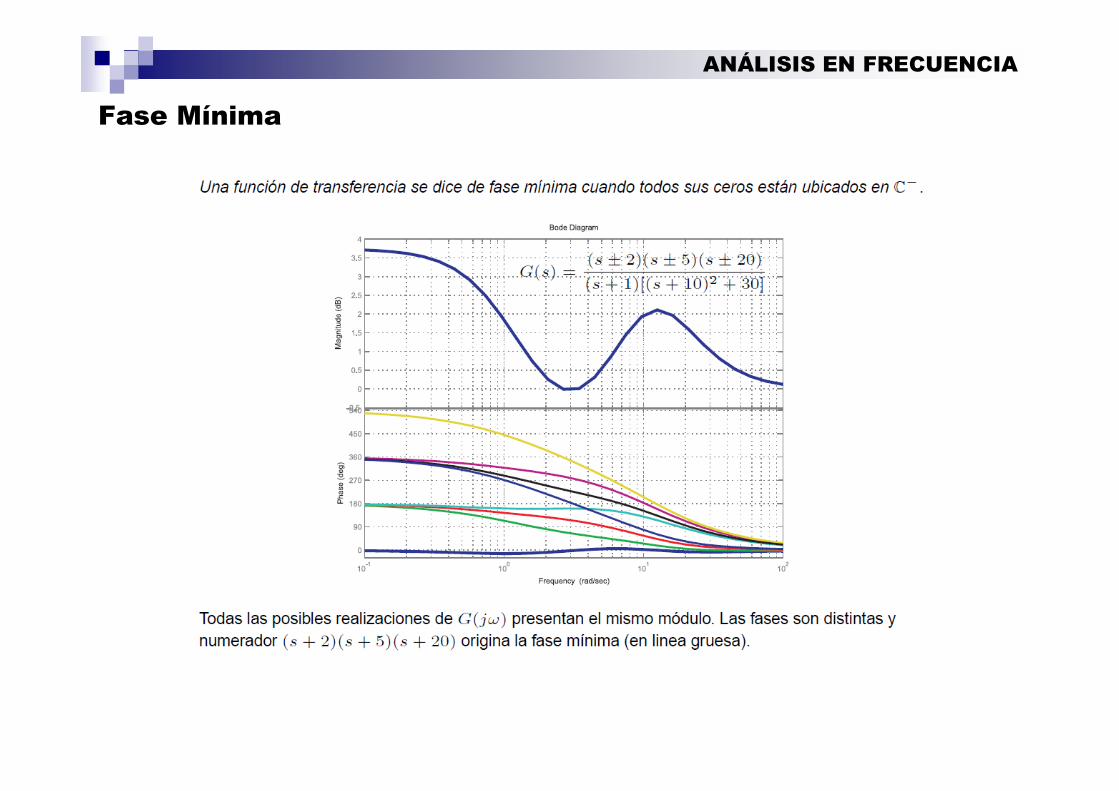
Fase Mínima
ANÁLISIS EN FRECUENCIA
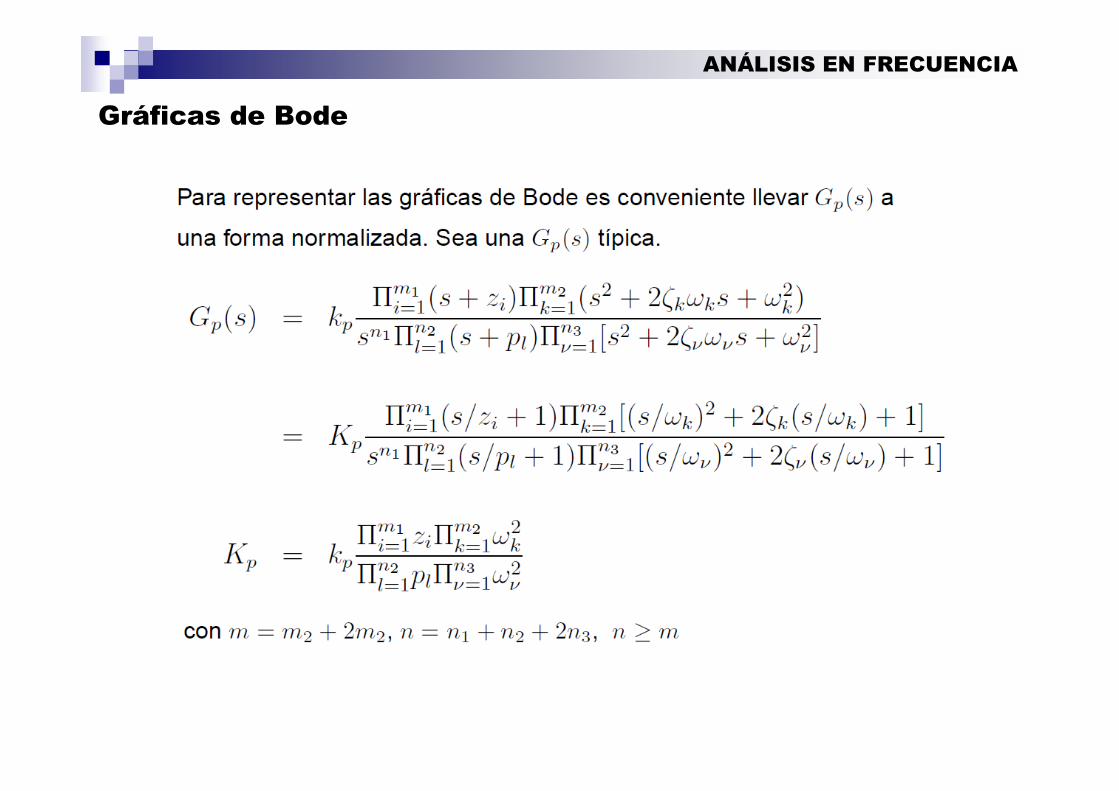
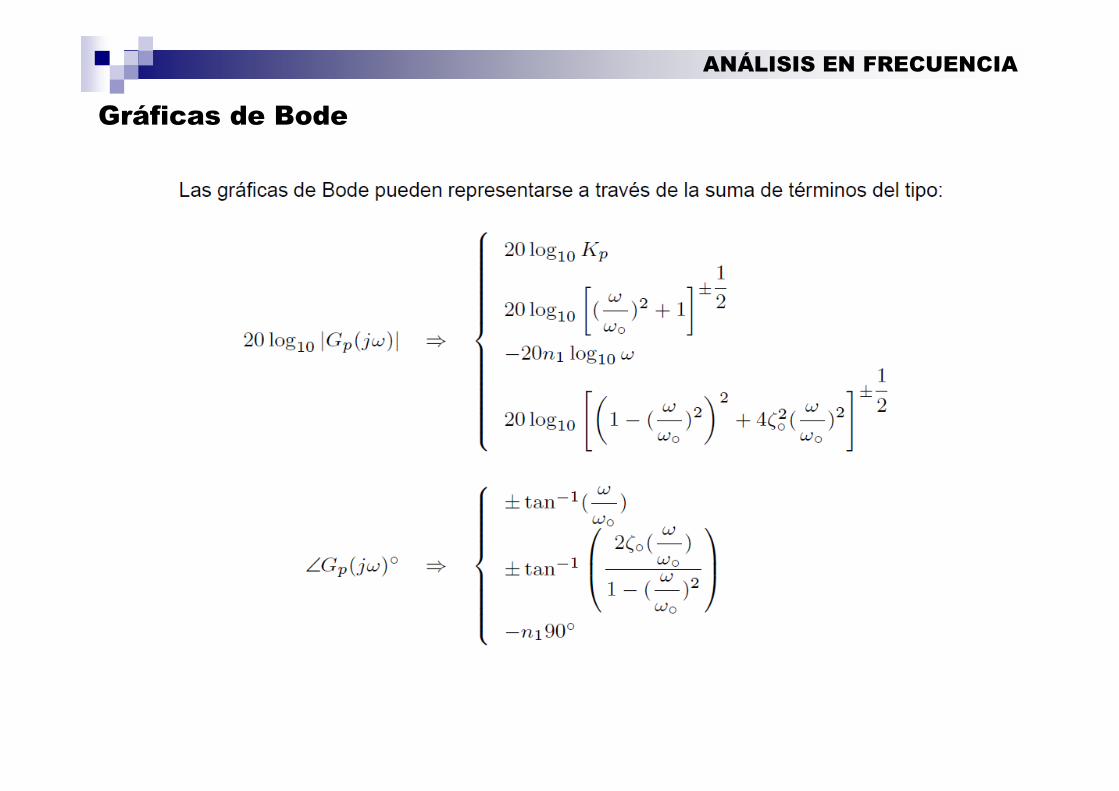
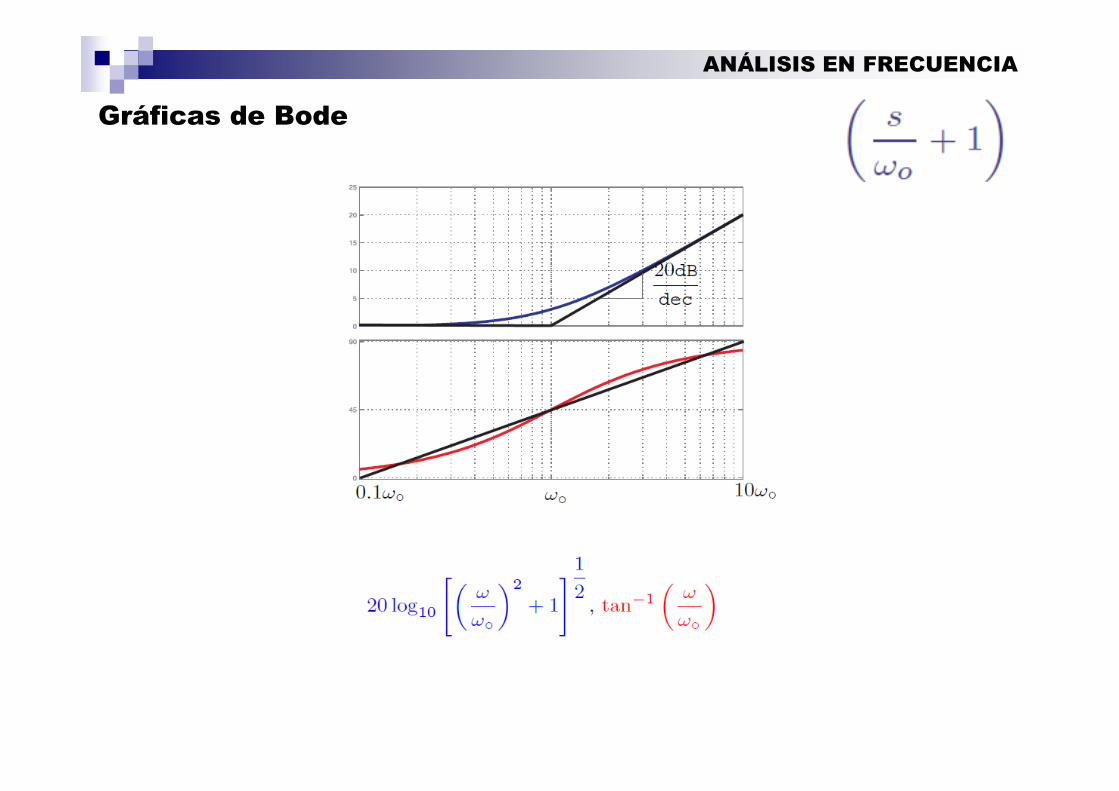
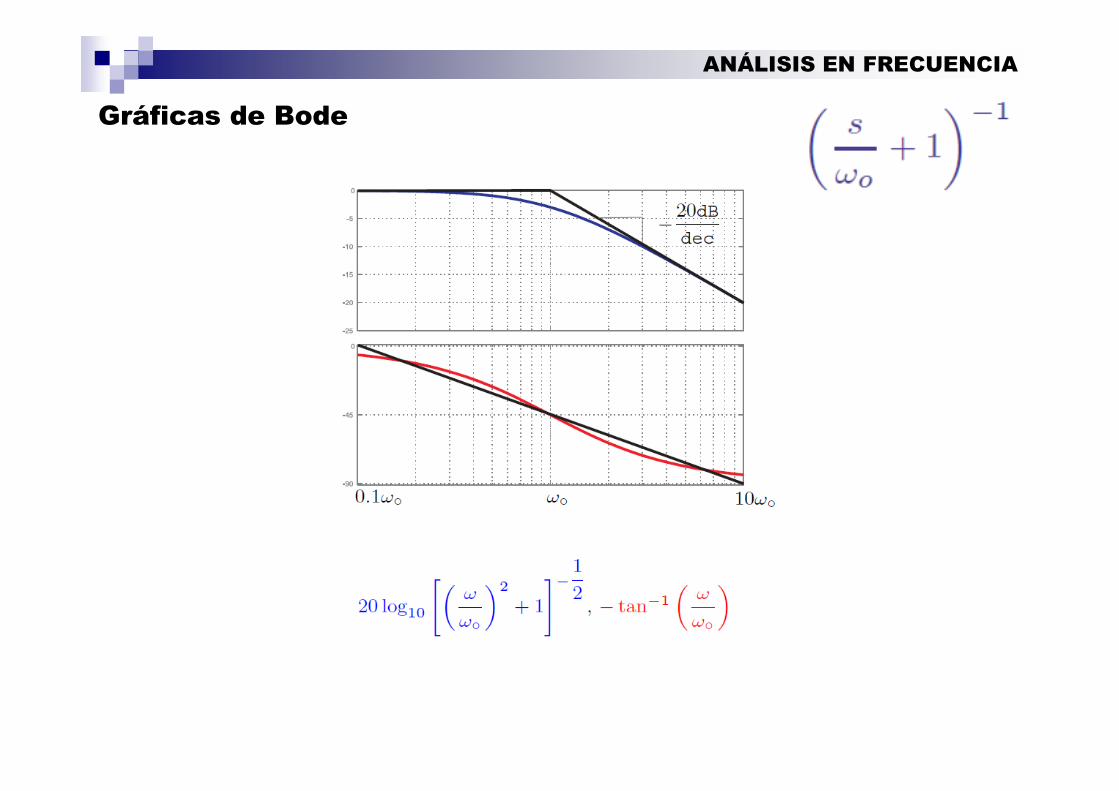
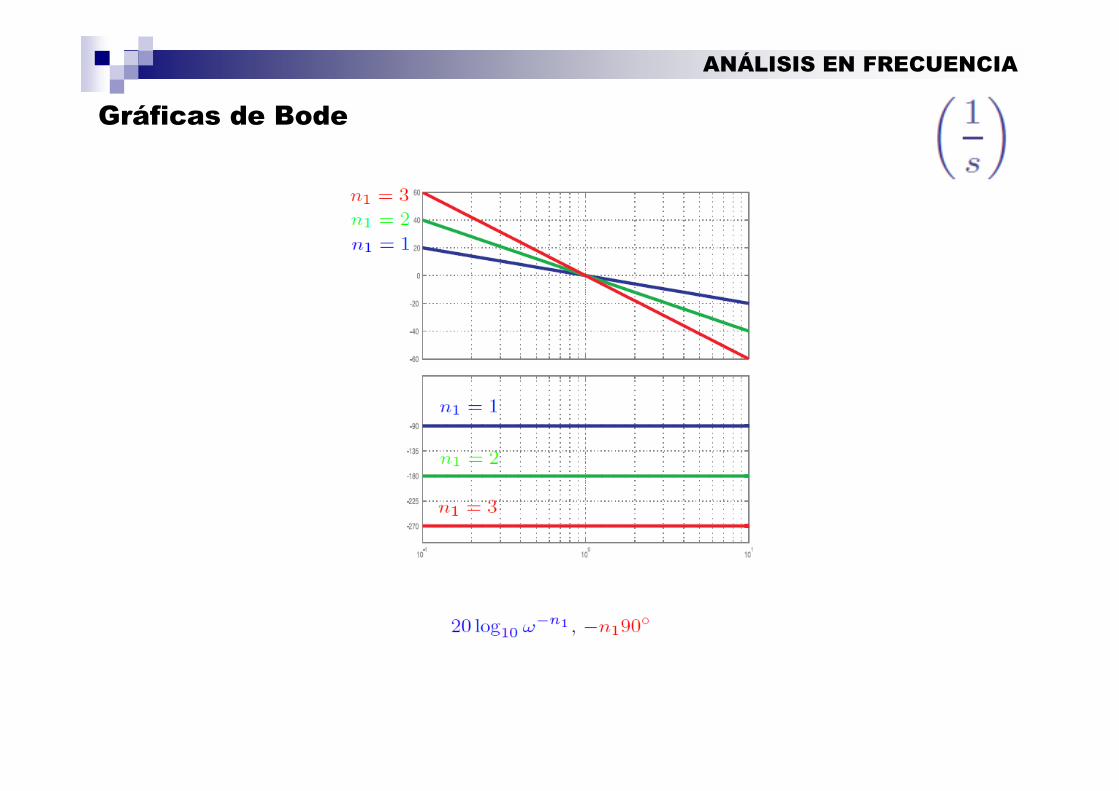
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
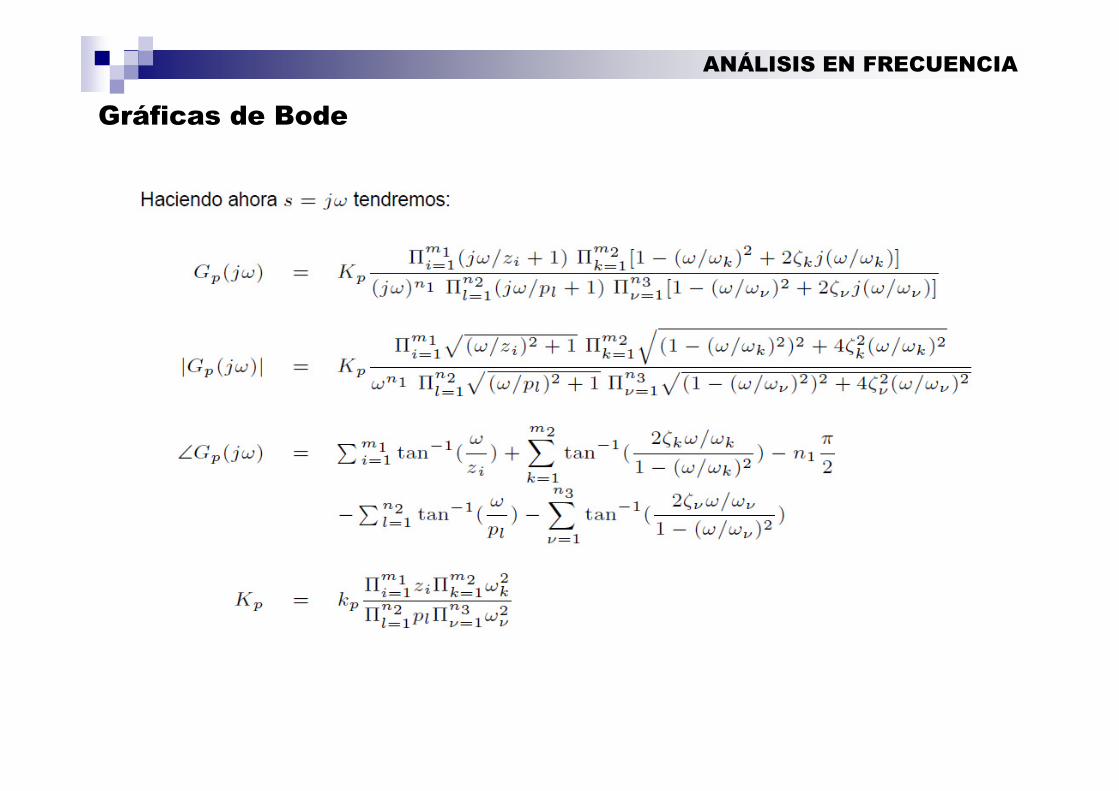
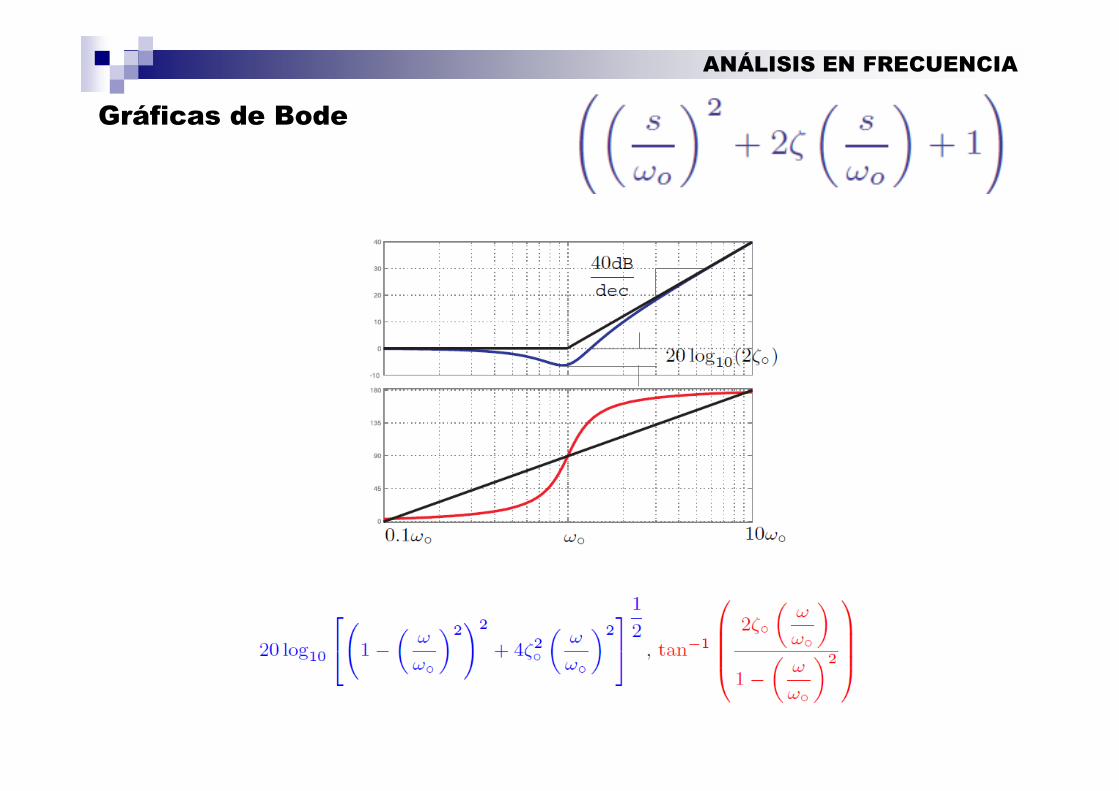
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
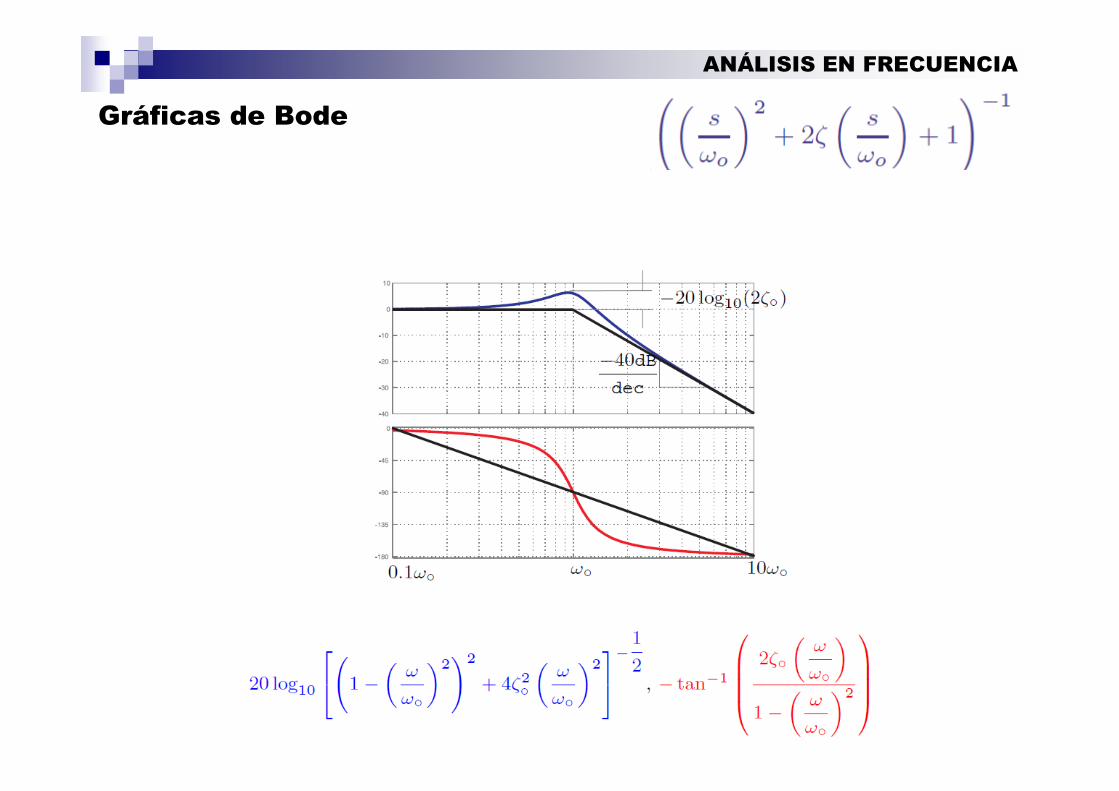
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
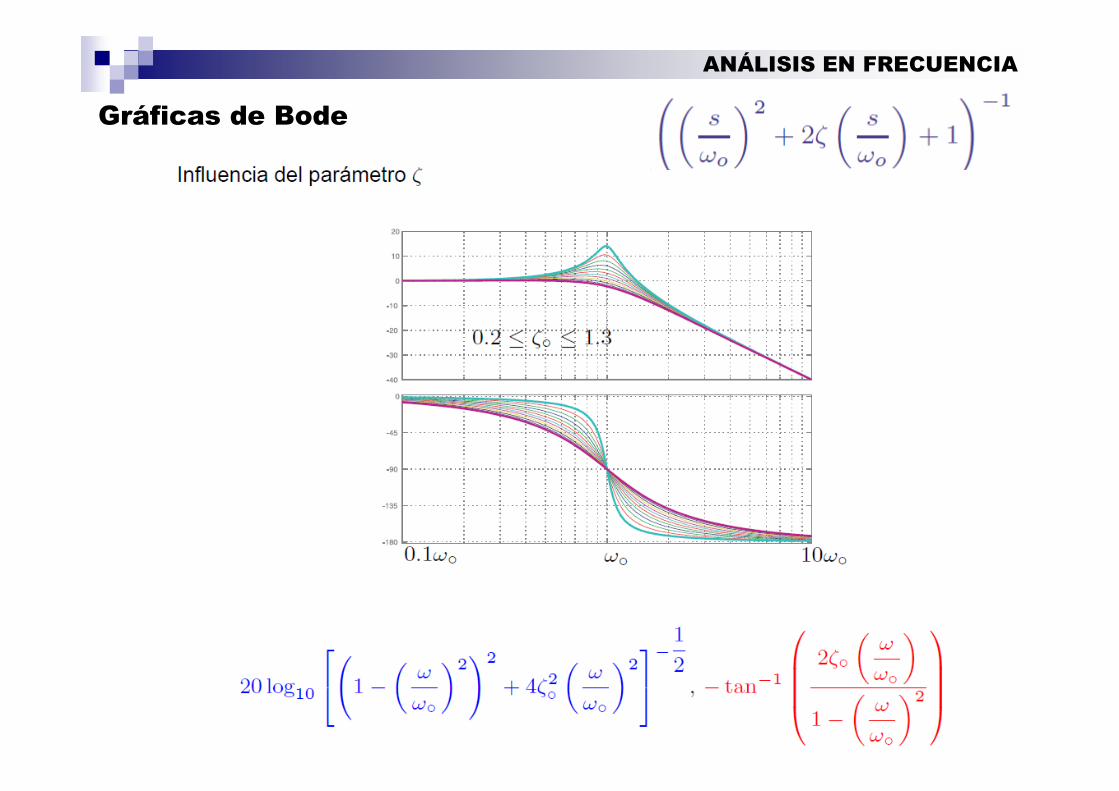
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
Gráficas de Bode
ANÁLISIS EN FRECUENCIA
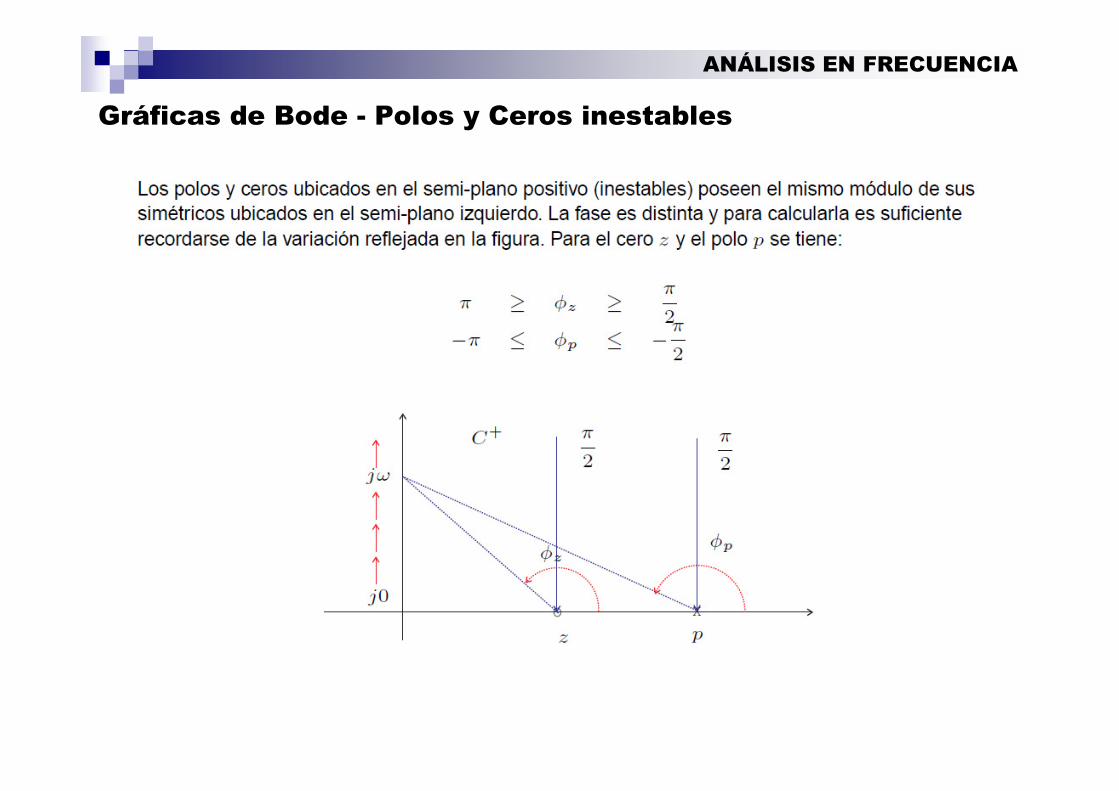
Gráficas de Bode - Polos y Ceros inestables
ANÁLISIS EN FRECUENCIA
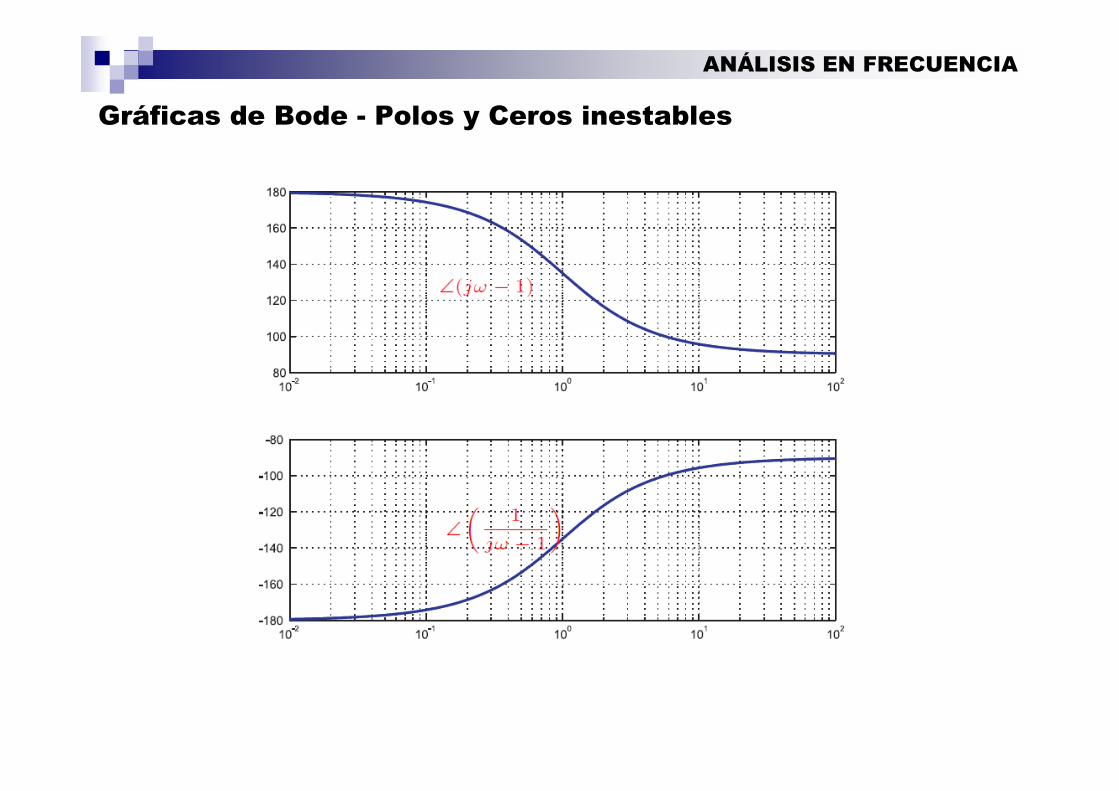
Gráficas de Bode - Polos y Ceros inestables
ANÁLISIS EN FRECUENCIA
Ejemplo
ANÁLISIS EN FRECUENCIA
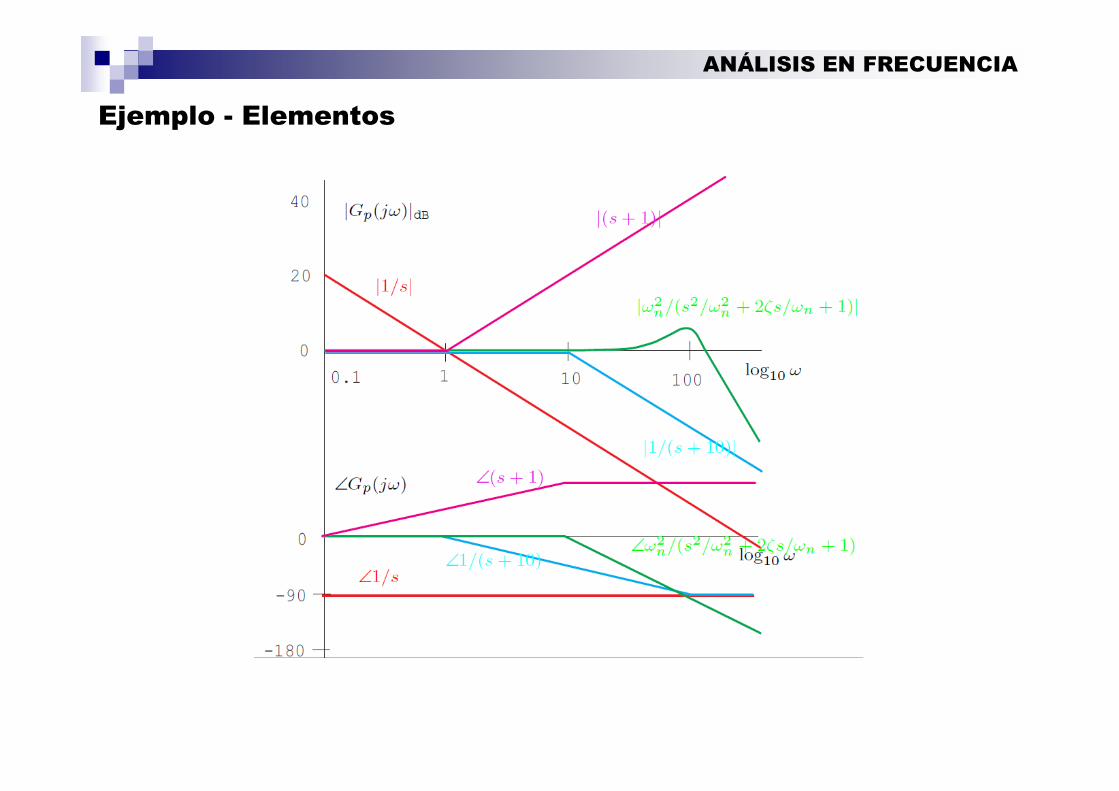
Ejemplo - Elementos
ANÁLISIS EN FRECUENCIA
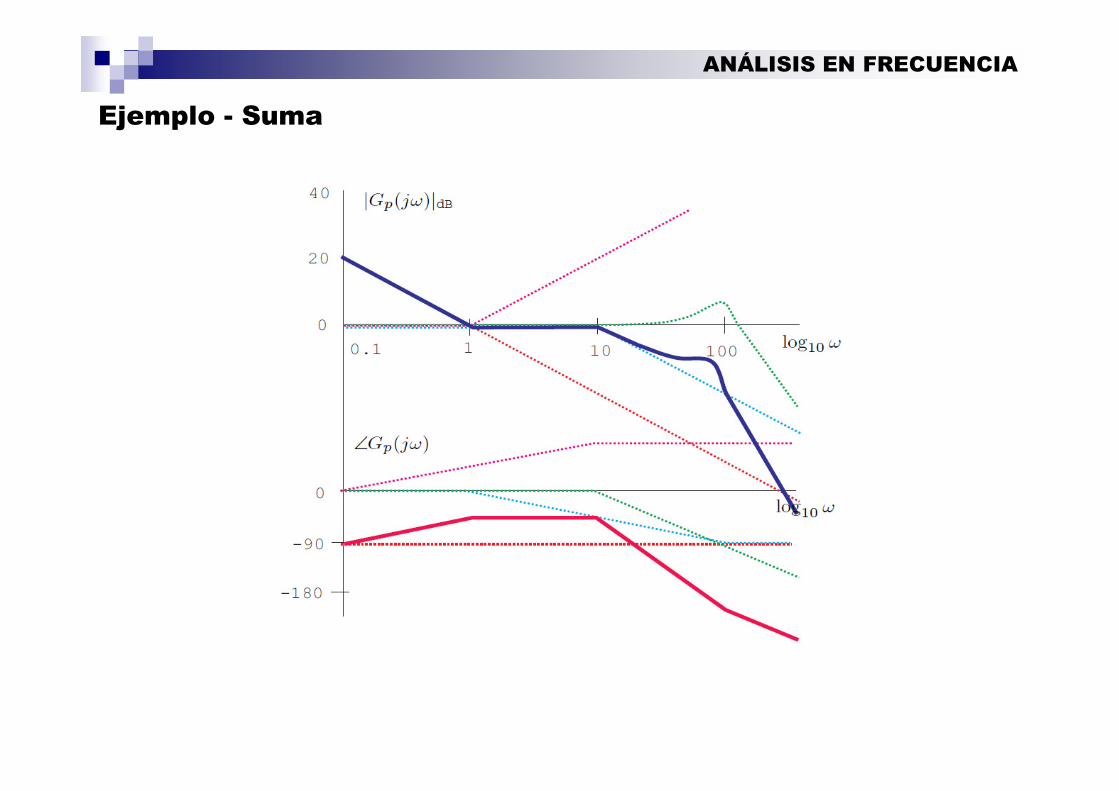
Ejemplo - Suma
ANÁLISIS EN FRECUENCIA
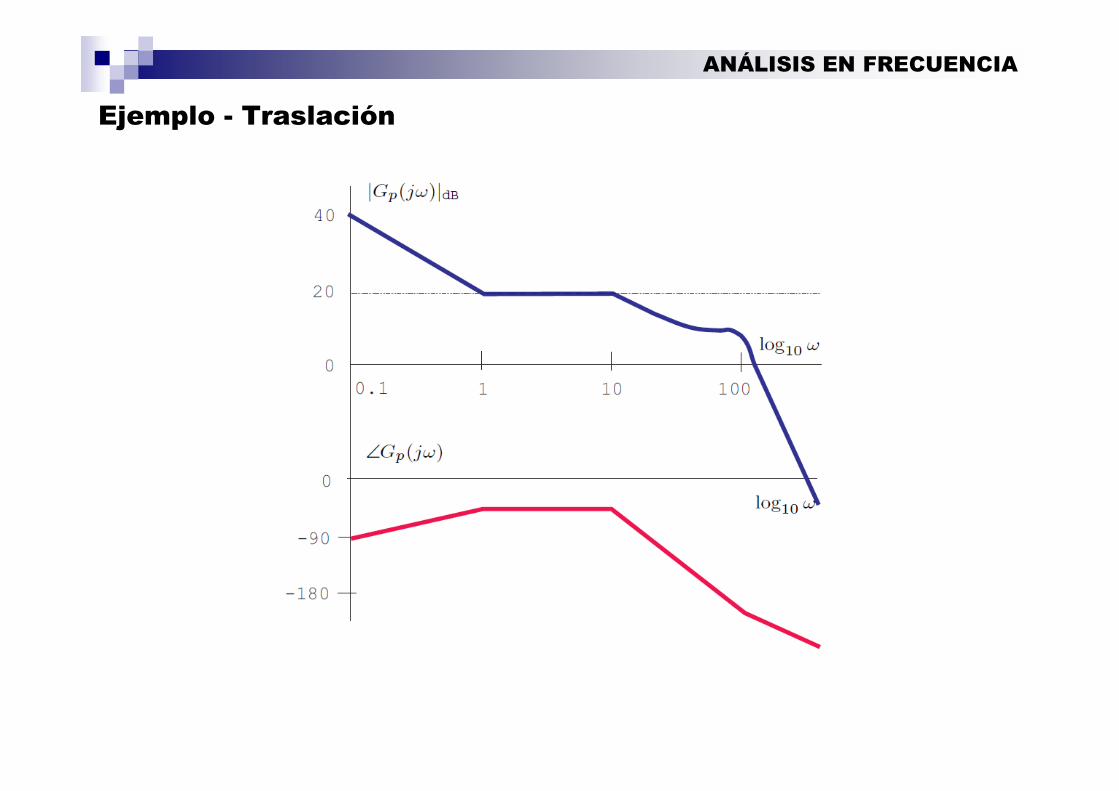
Ejemplo - Traslación
ANÁLISIS EN FRECUENCIA
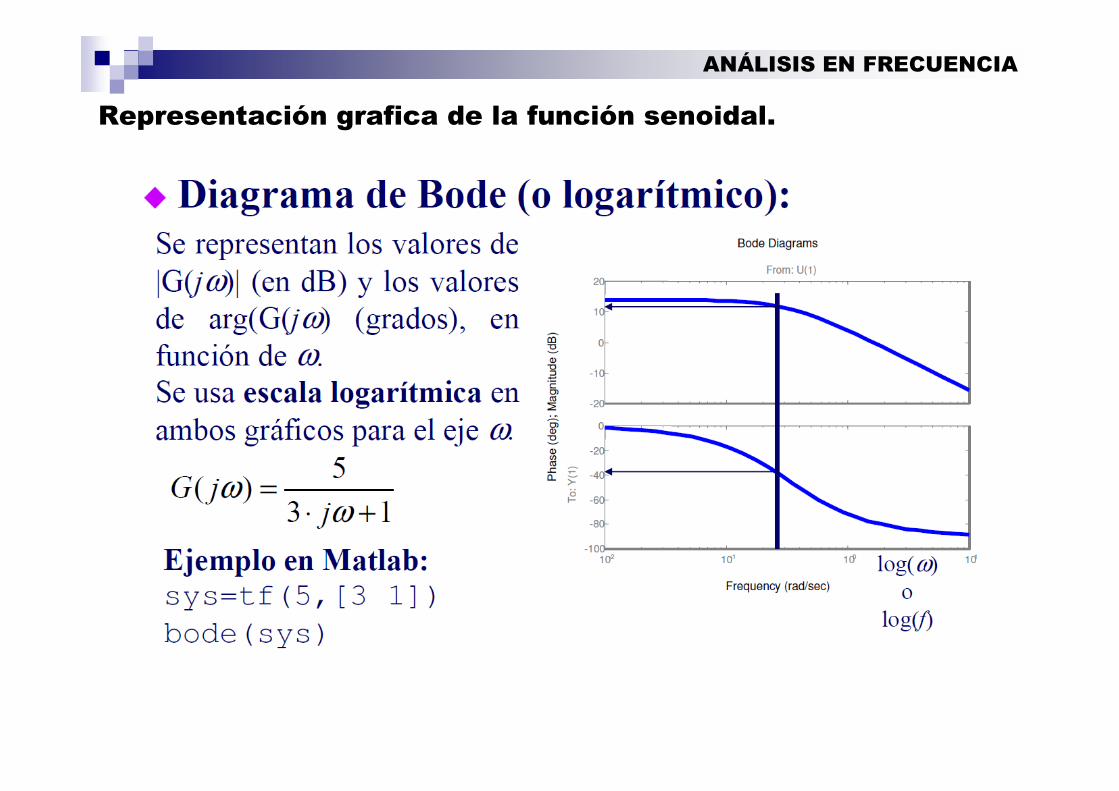
Representación grafica de la función senoidal.
ANÁLISIS EN FRECUENCIA
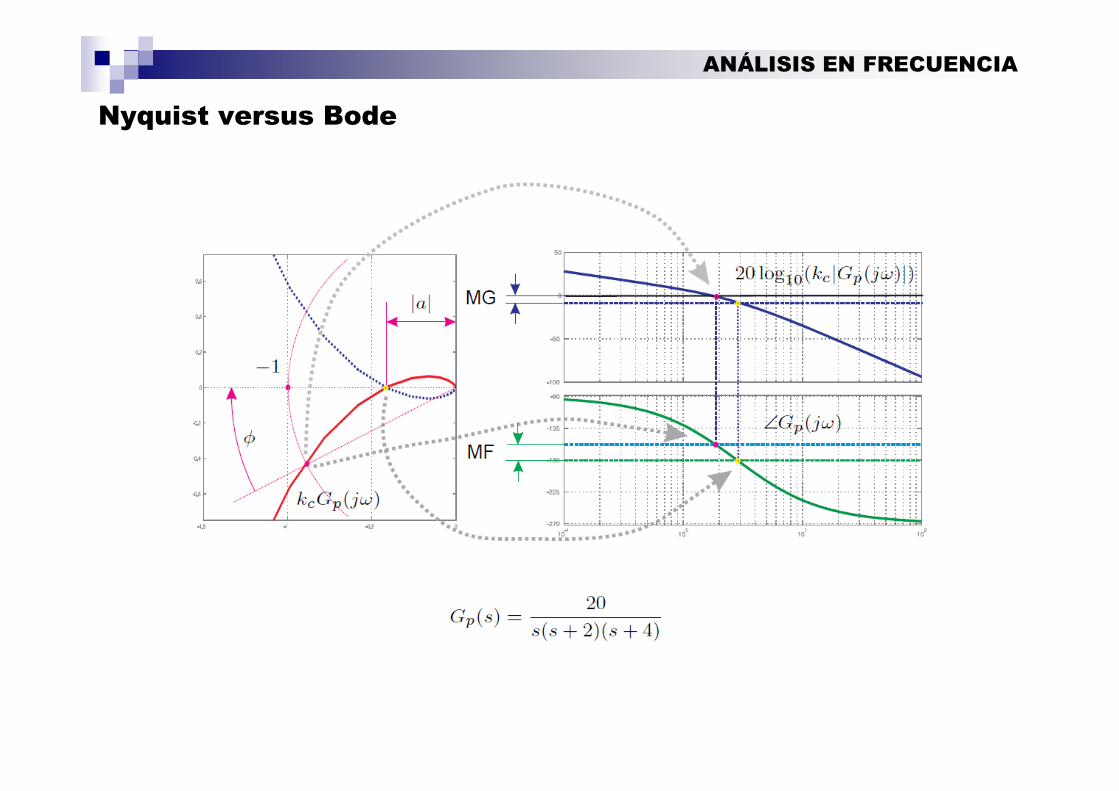
Nyquist versus Bode
ANÁLISIS EN FRECUENCIA
Estabilidad
ANÁLISIS EN FRECUENCIA
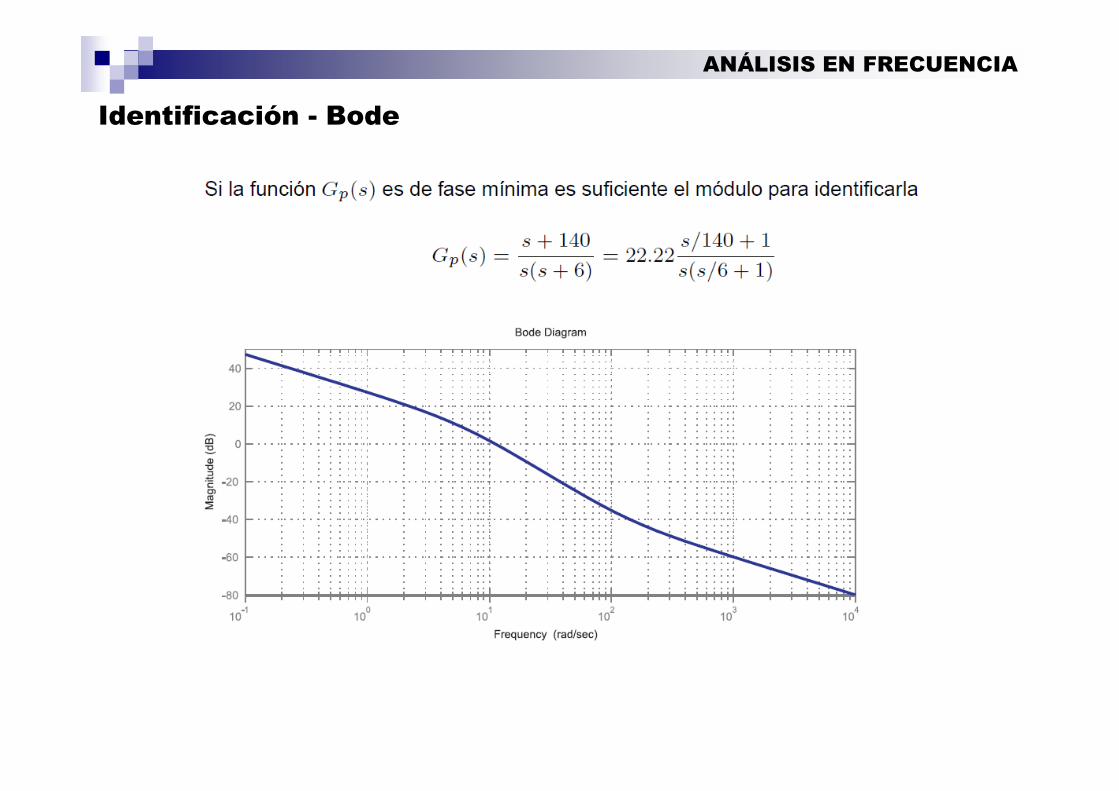
Identificación - Bode
ANÁLISIS EN FRECUENCIA
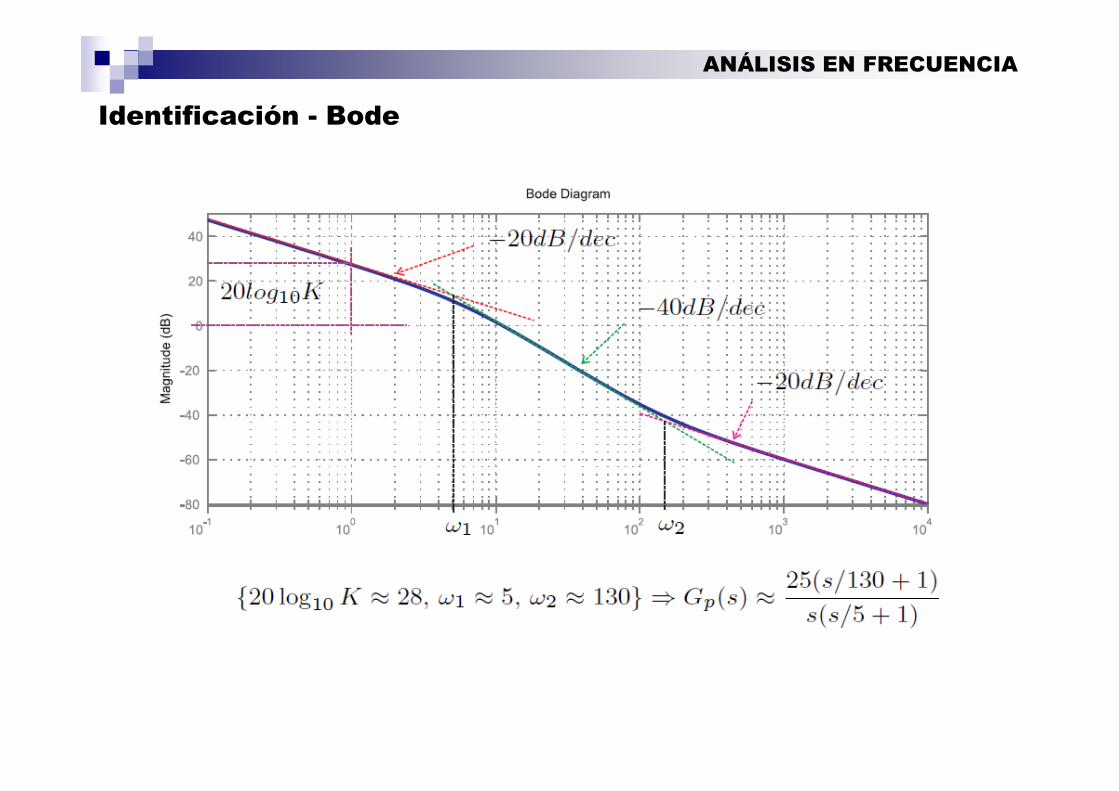
Identificación - Bode
SISTEMAS DE CONTROL
Sistemas Discretos
Master universitario en energías y combustibles para el futuro
Julio
Bodega
José
Sistemas discretos
Introducción: Sistemas en tiempo discreto y sistemas muestreados
Sistemas discretos
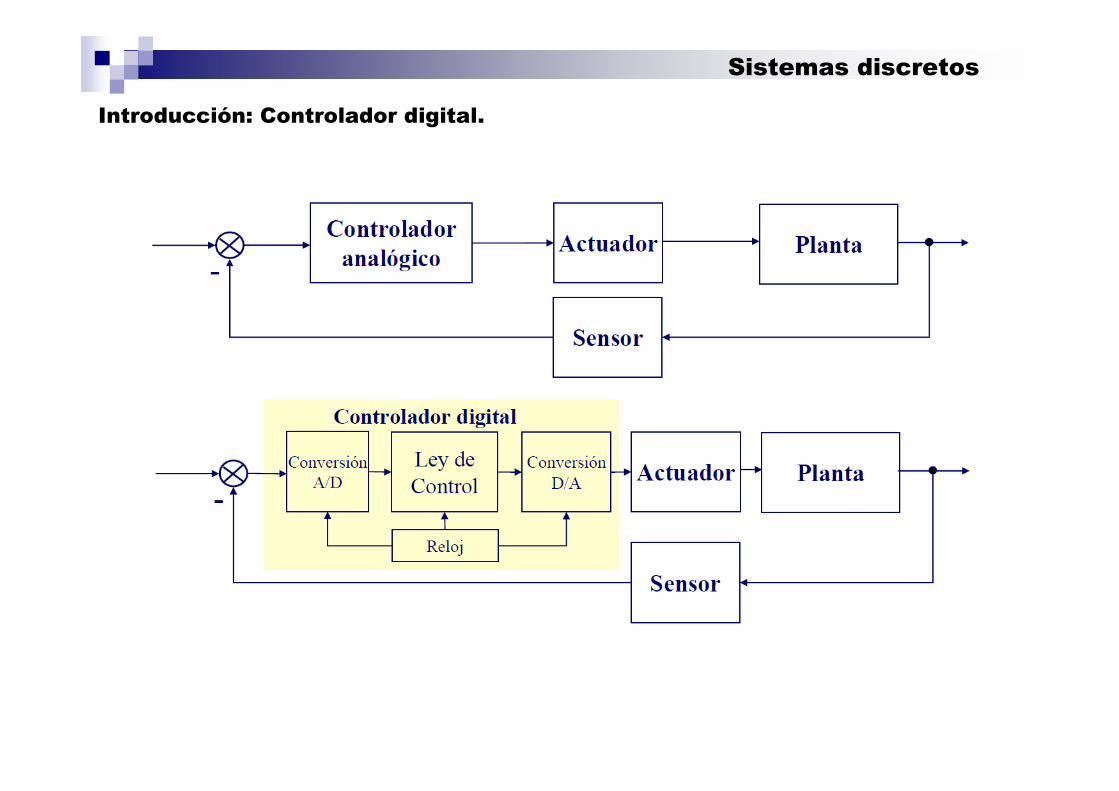
Introducción: Controlador digital.
Sistemas discretos
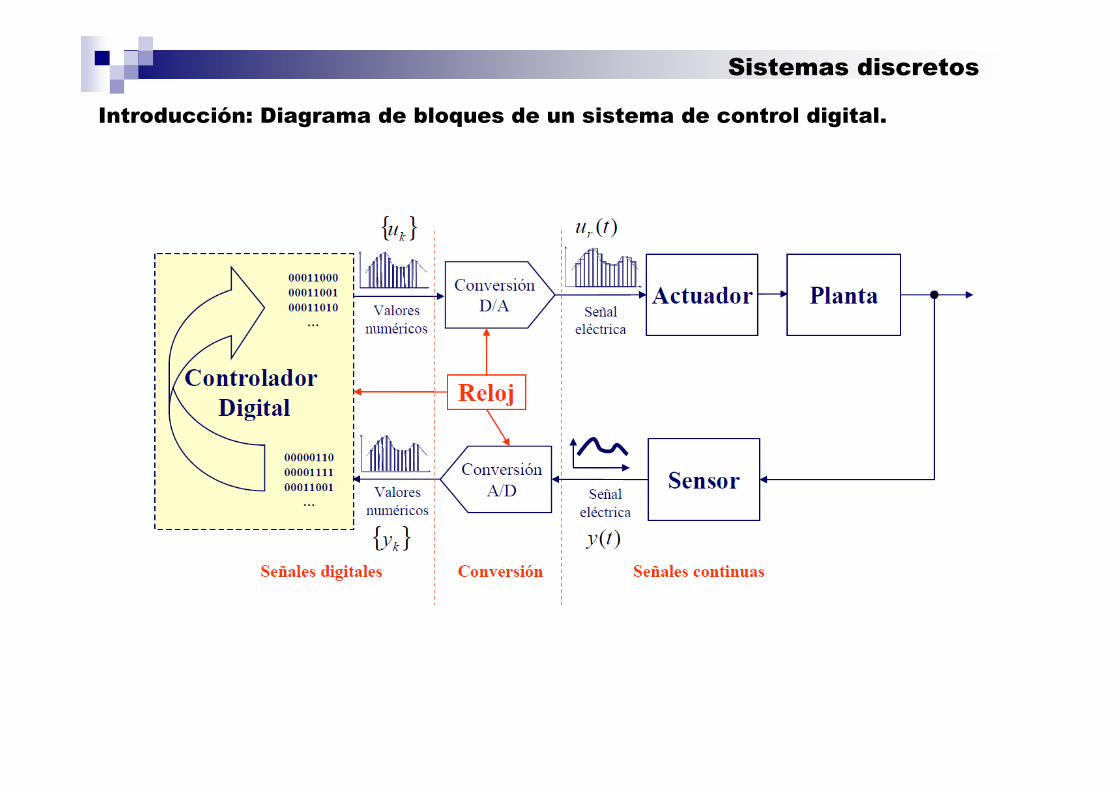
Introducción: Diagrama de bloques de un sistema de control digital.
Sistemas discretos
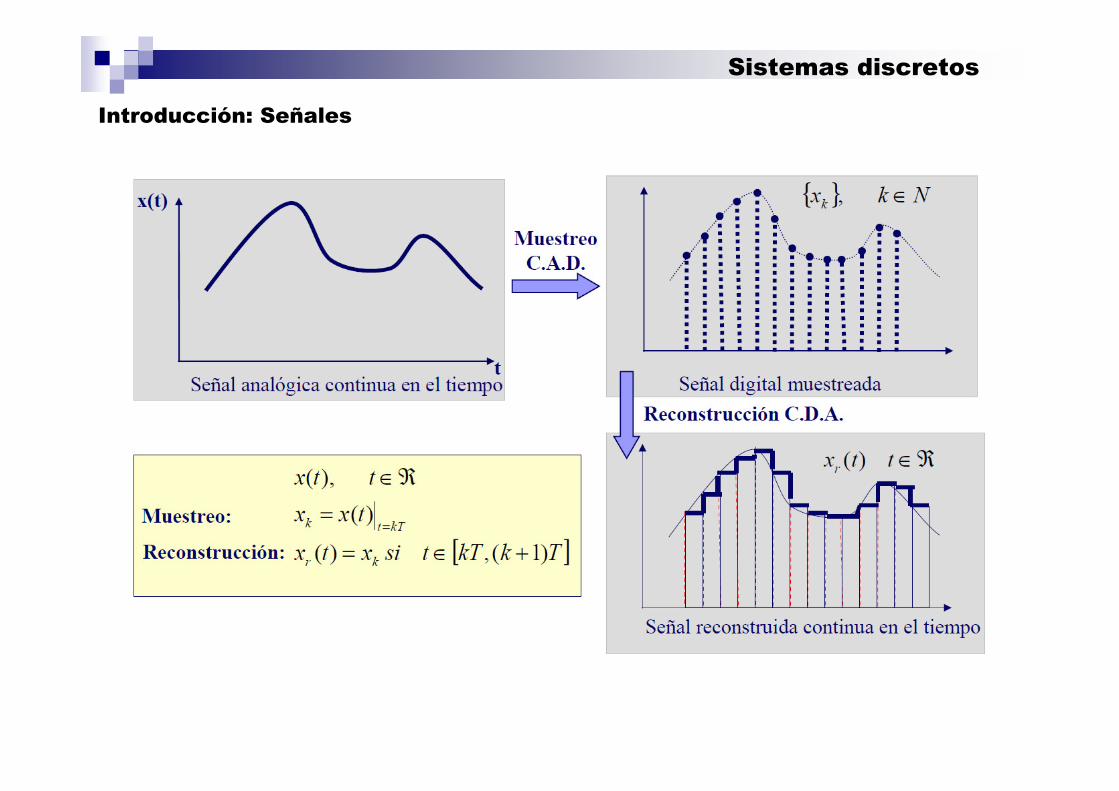
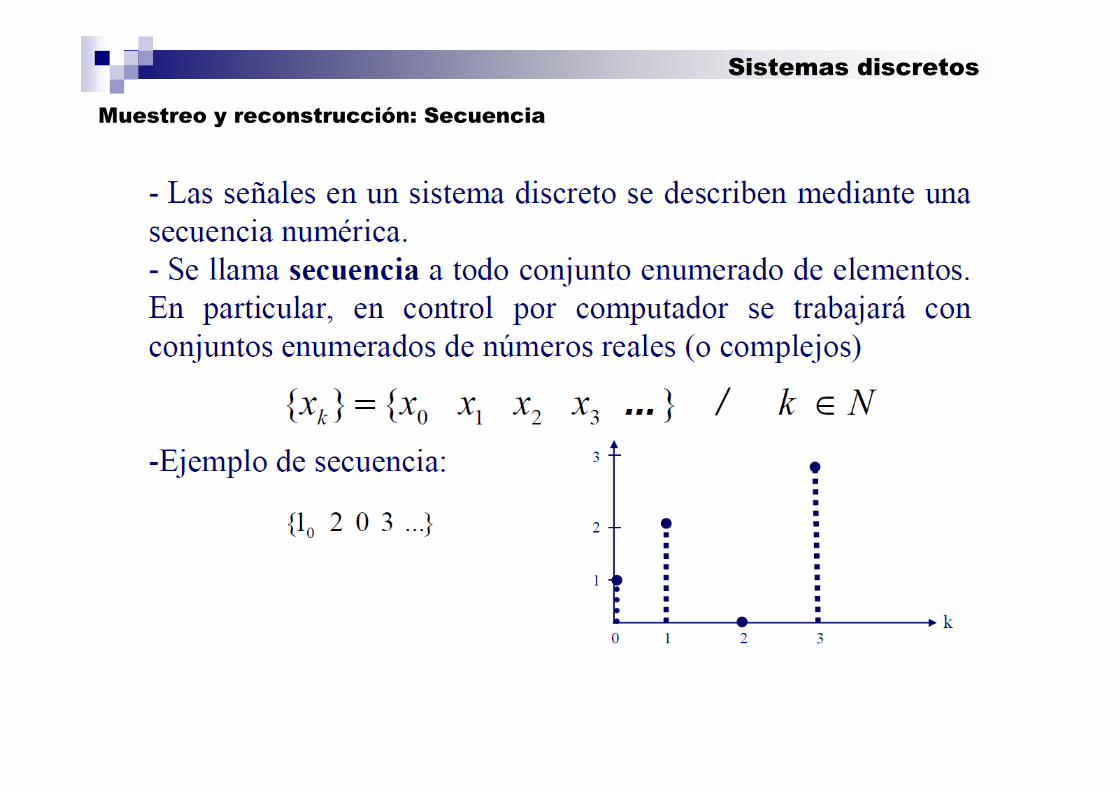
Introducción: Señales
Sistemas discretos
Muestreo y reconstrucción: Secuencia
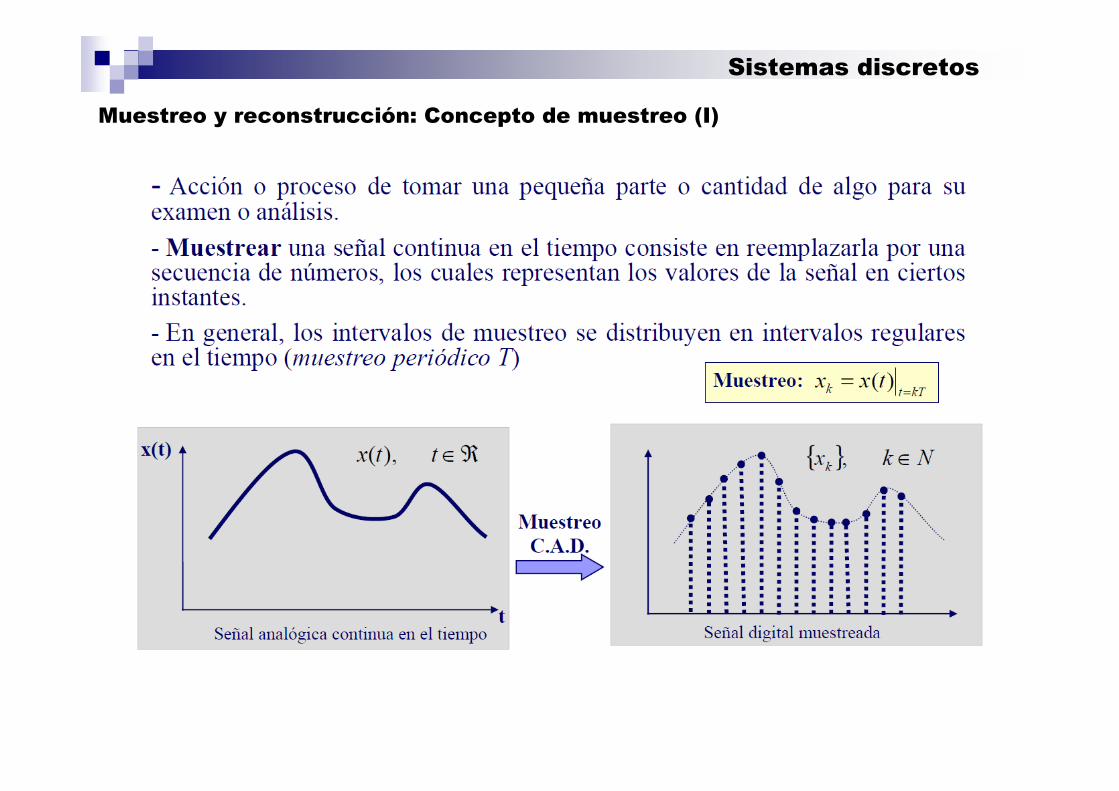
Sistemas discretos
Muestreo y reconstrucción: Concepto de muestreo (I)
Sistemas discretos
Muestreo y reconstrucción: Concepto de muestreo (II)
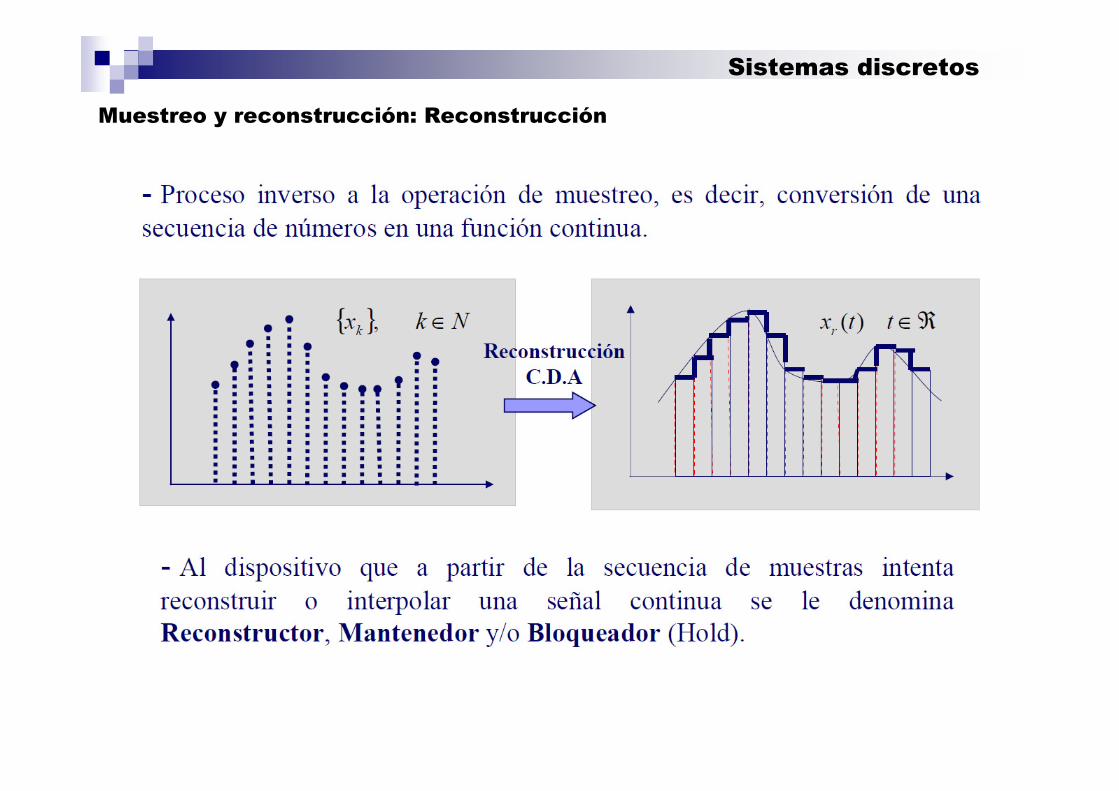
Sistemas discretos
Muestreo y reconstrucción: Reconstrucción
Sistemas discretos
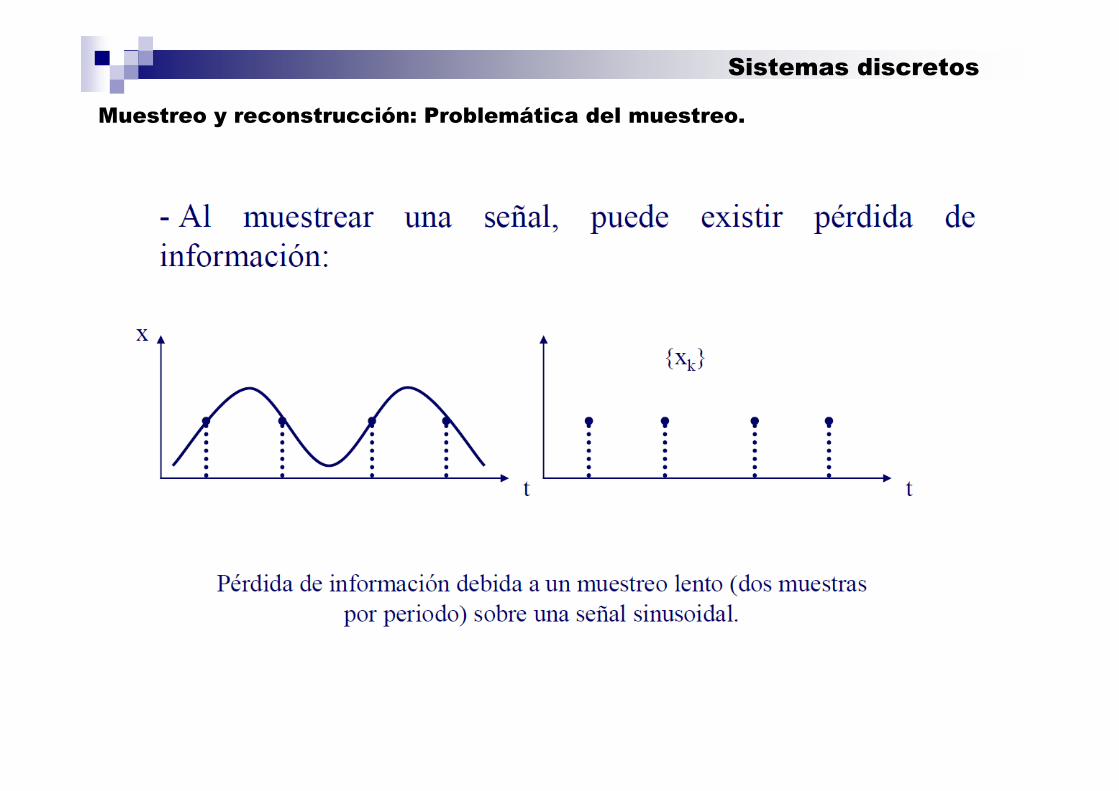
Muestreo y reconstrucción: Problemática del muestreo.
Sistemas discretos
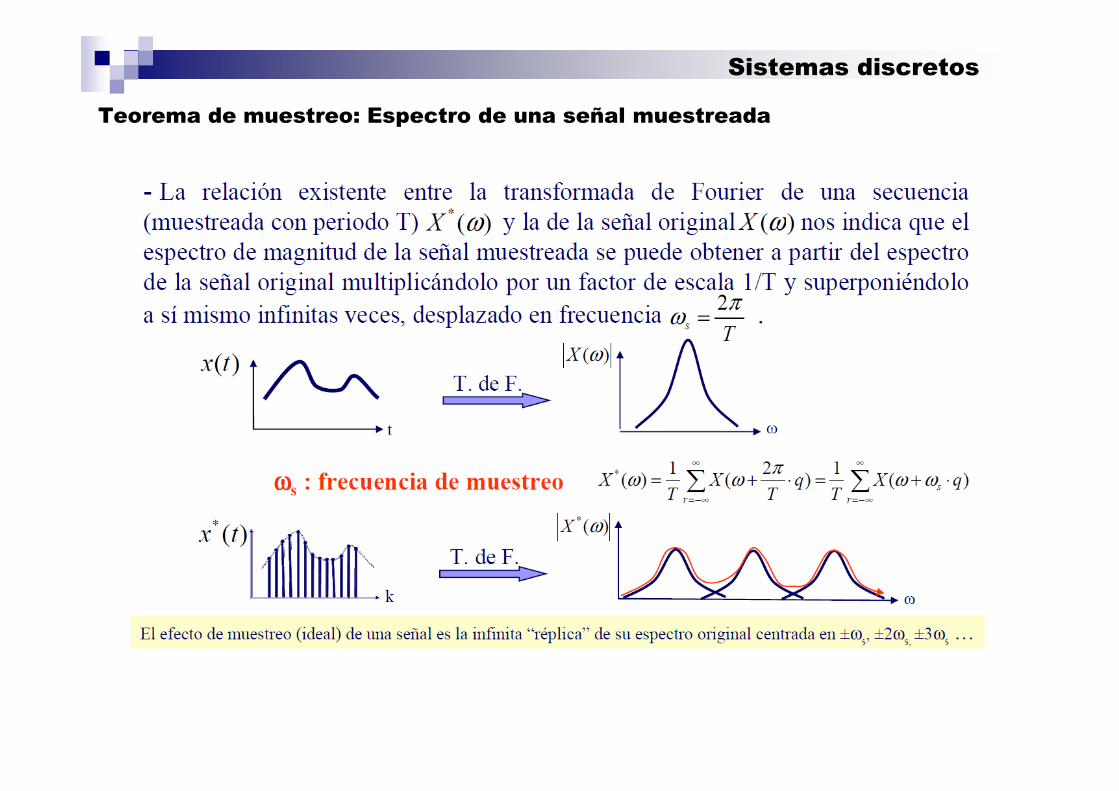
Teorema de muestreo: Espectro de una señal muestreada
Sistemas discretos
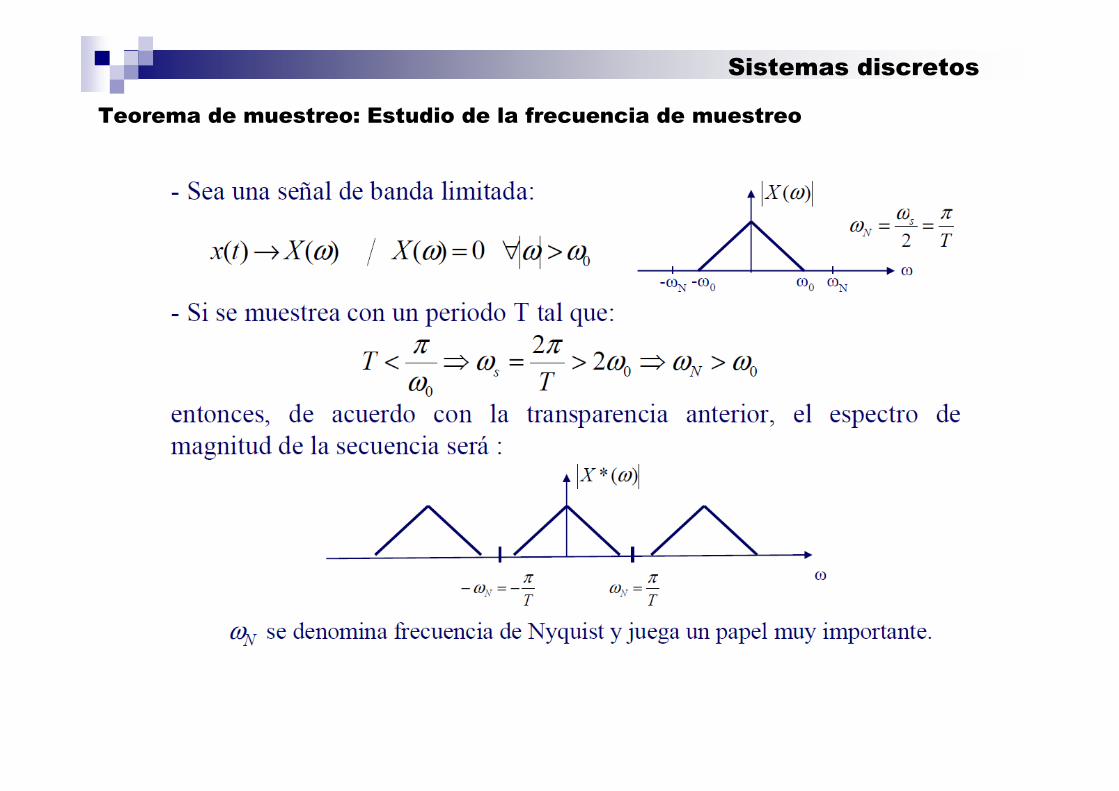
Teorema de muestreo: Estudio de la frecuencia de muestreo
Sistemas discretos
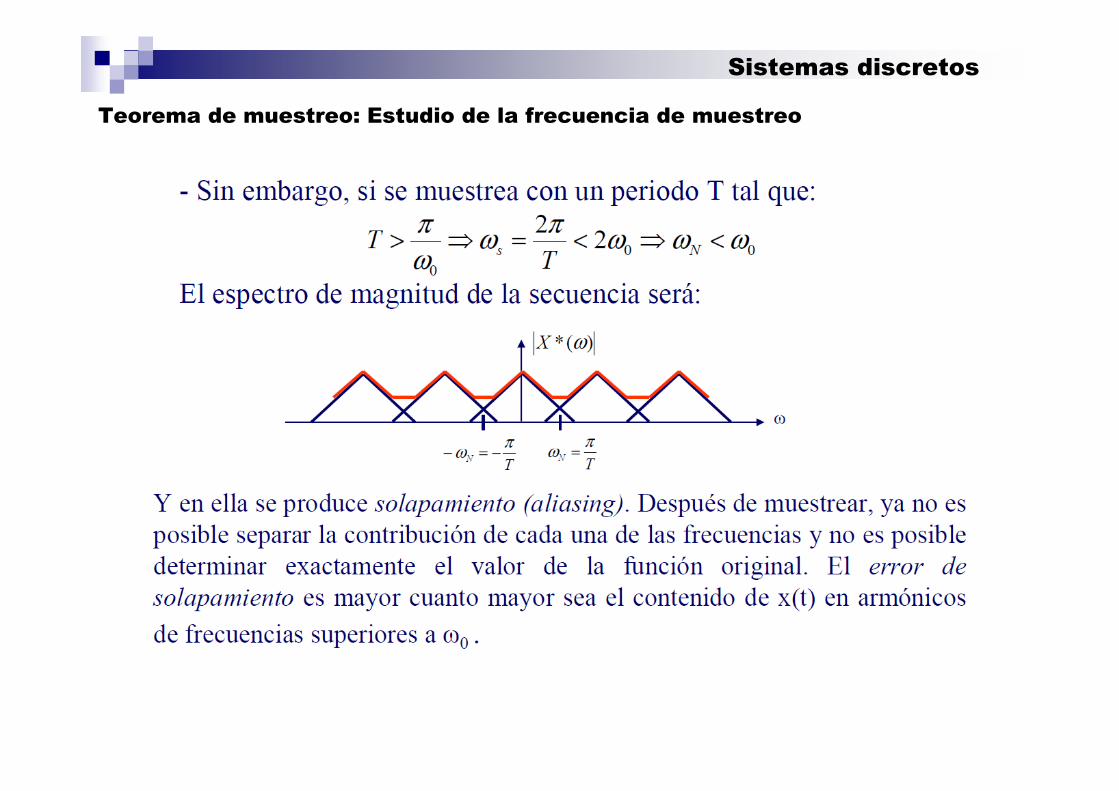
Teorema de muestreo: Estudio de la frecuencia de muestreo
Sistemas discretos
Teorema de muestreo de Shannon
Sistemas discretos
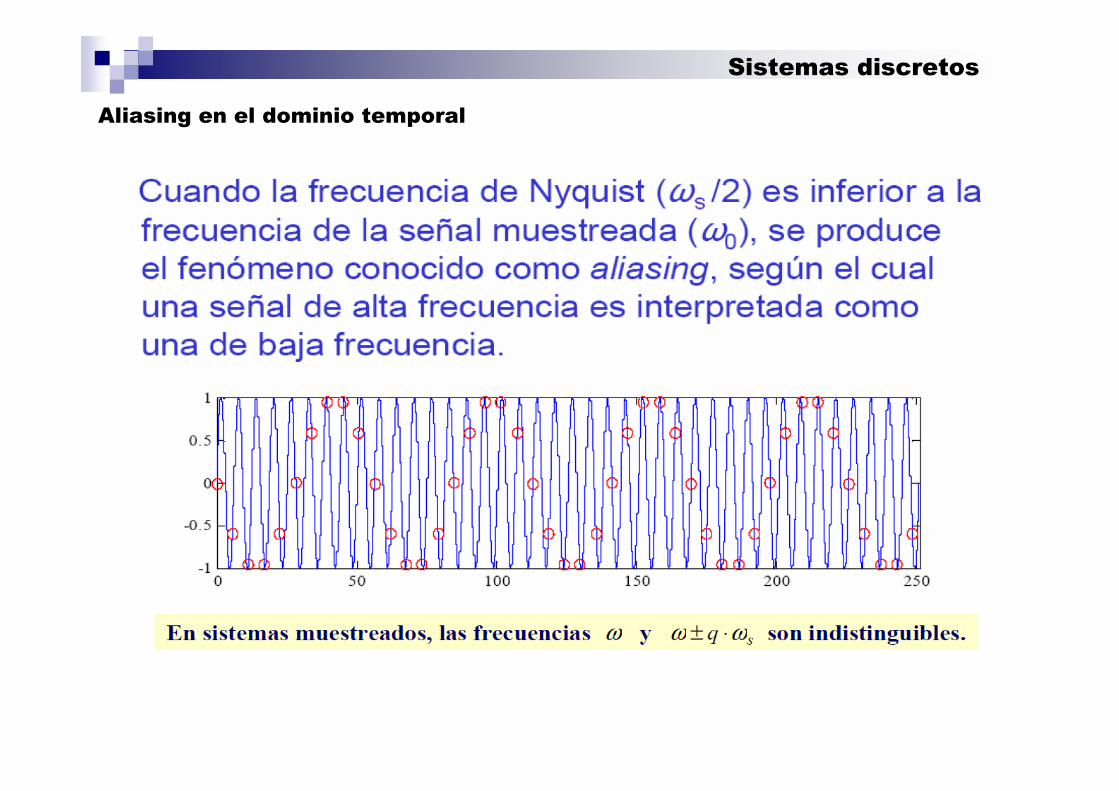
Aliasing en el dominio temporal
Sistemas discretos
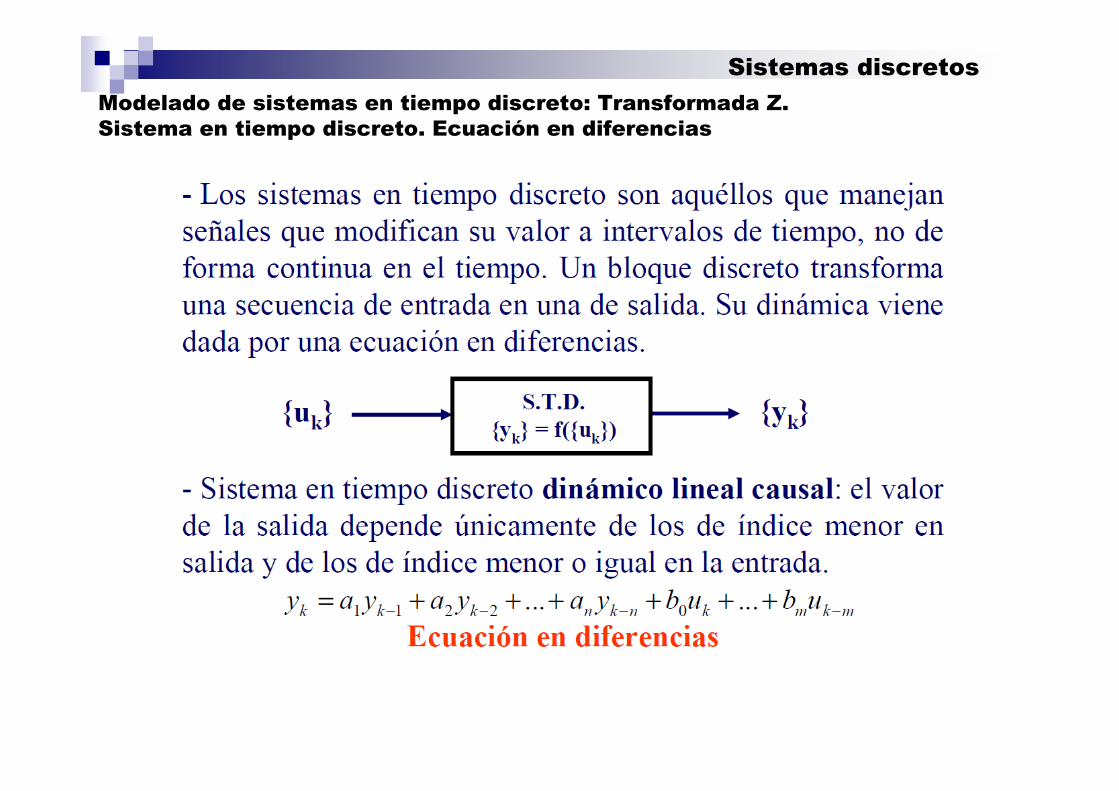
Modelado de sistemas en tiempo discreto: Transformada Z.
Sistema en tiempo discreto. Ecuación en diferencias
Sistemas discretos
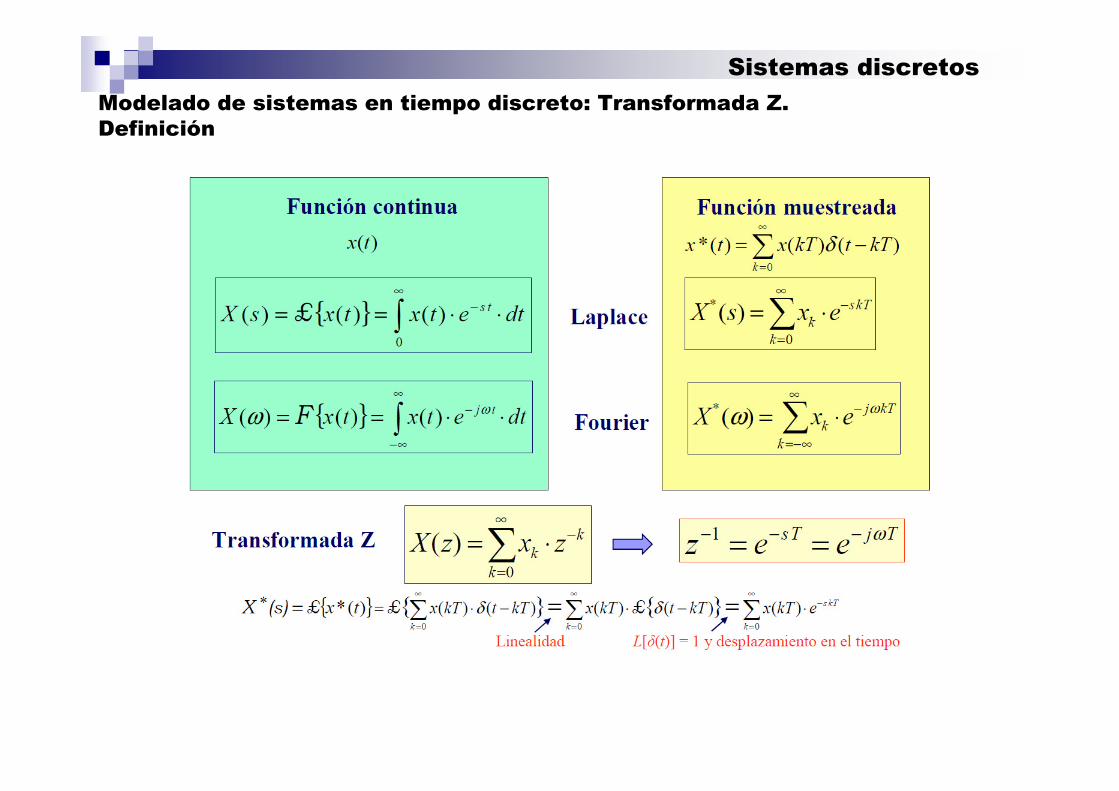
Modelado de sistemas en tiempo discreto: Transformada Z.
Definición
Sistemas discretos
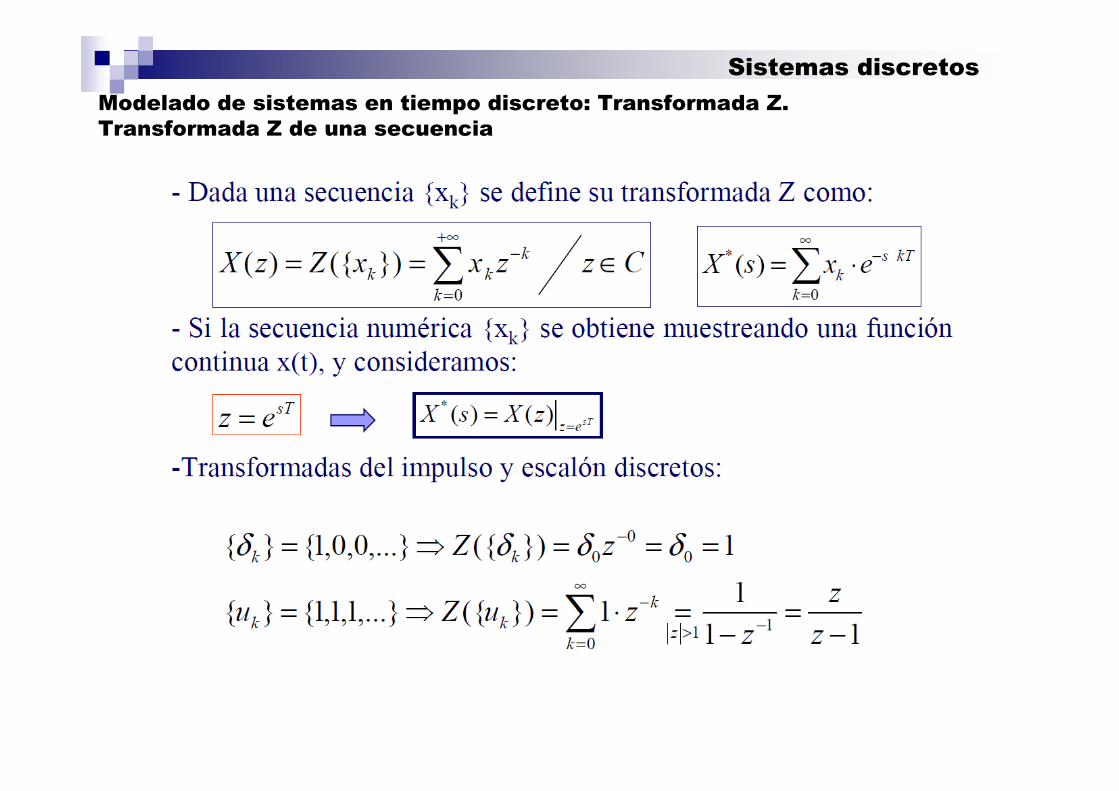
Modelado de sistemas en tiempo discreto: Transformada Z.
Transformada Z de una secuencia
Sistemas discretos
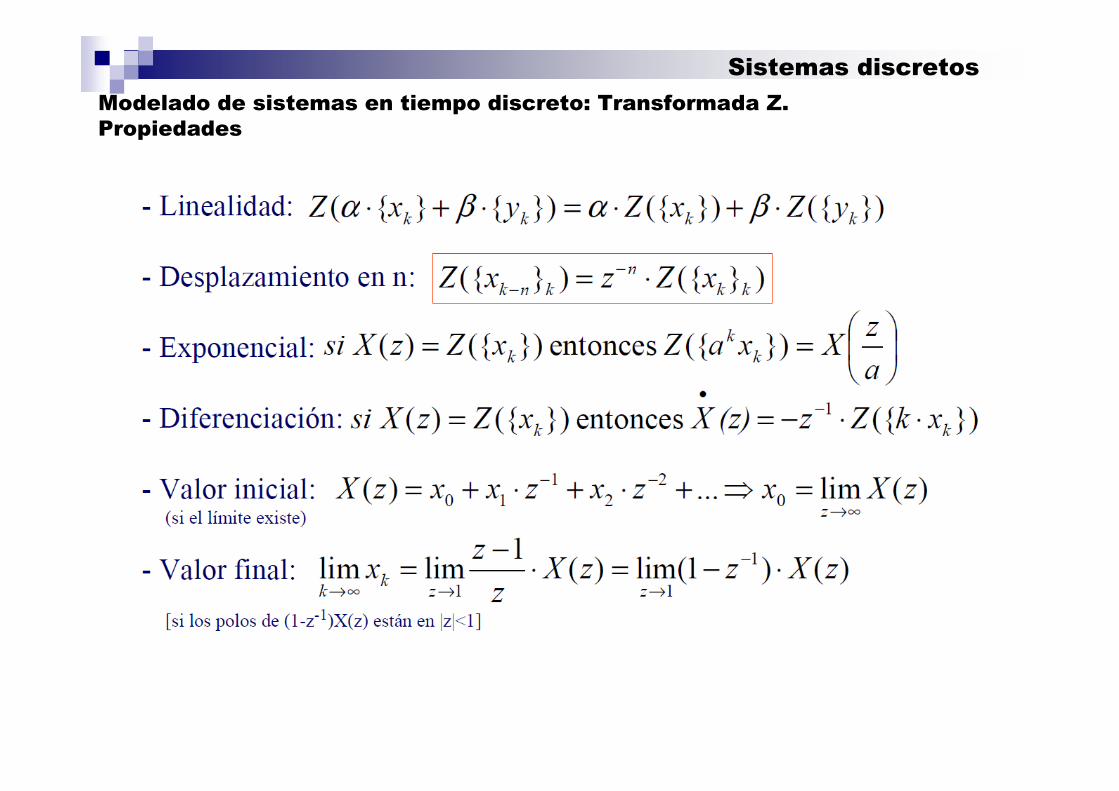
Modelado de sistemas en tiempo discreto: Transformada Z.
Propiedades
Sistemas discretos
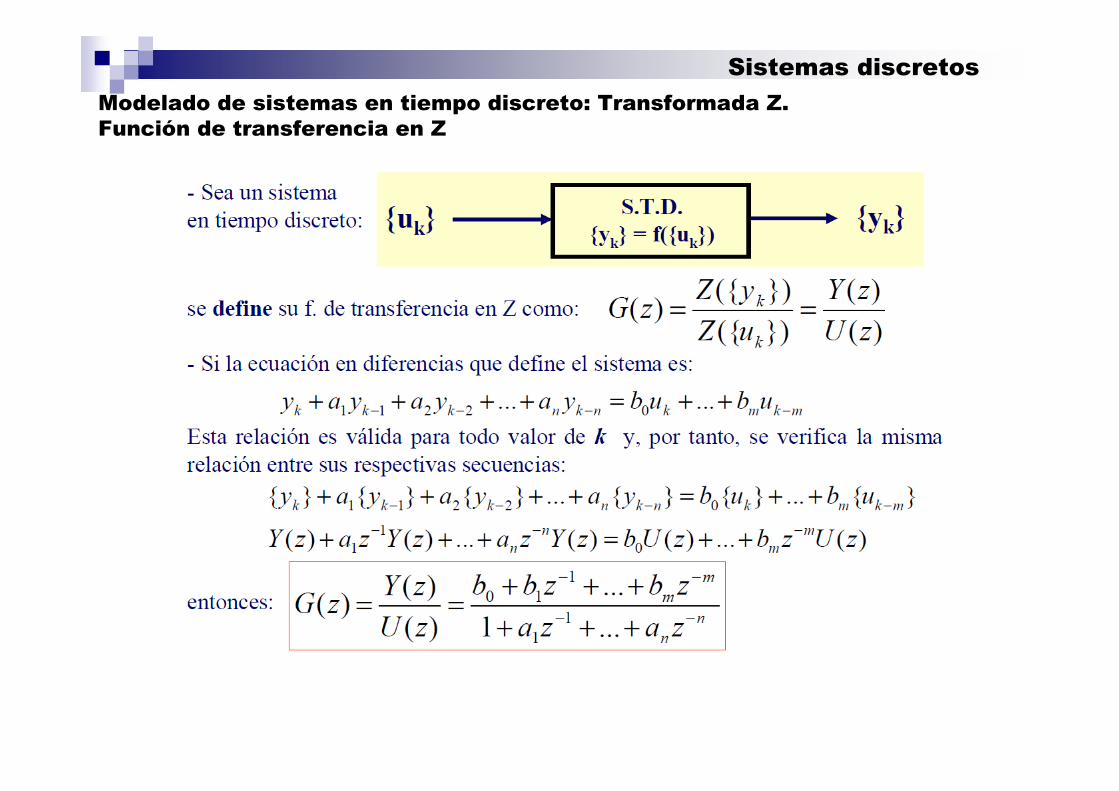
Modelado de sistemas en tiempo discreto: Transformada Z.
Función de transferencia en Z

Sistemas discretos
Discretización de sistemas continuos.
Aproximaciones
Sistemas discretos
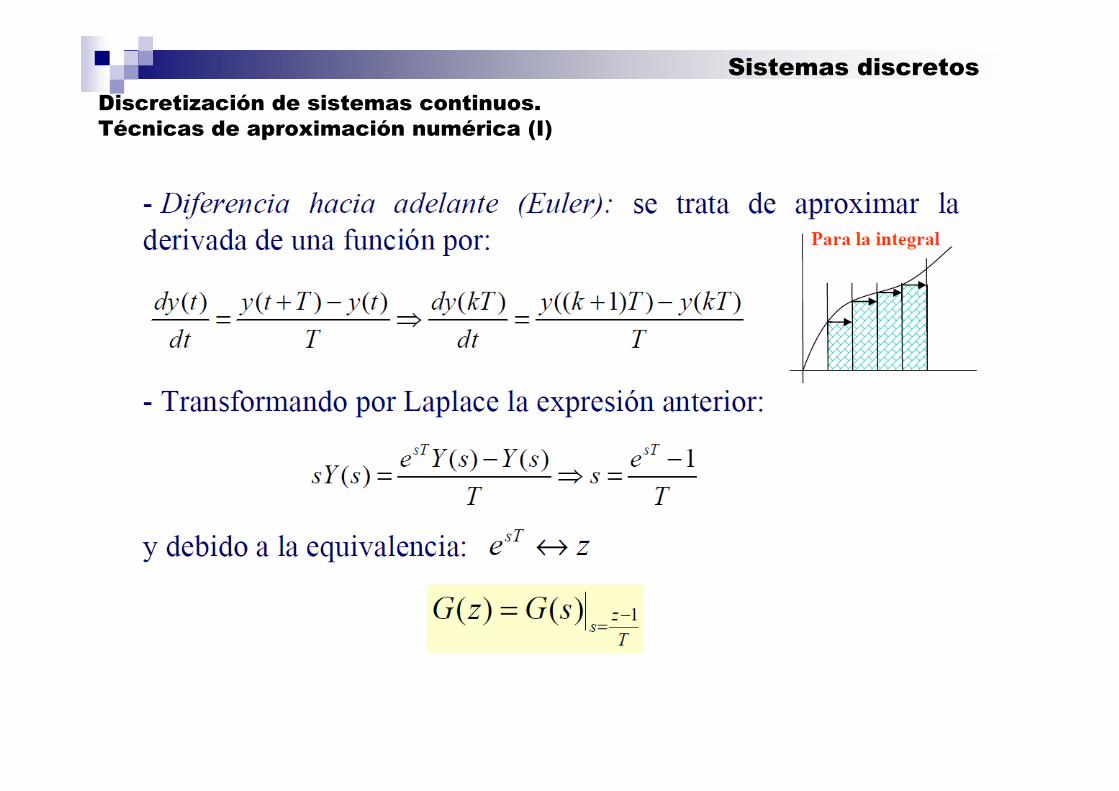
Discretización de sistemas continuos.
Técnicas de aproximación numérica (I)
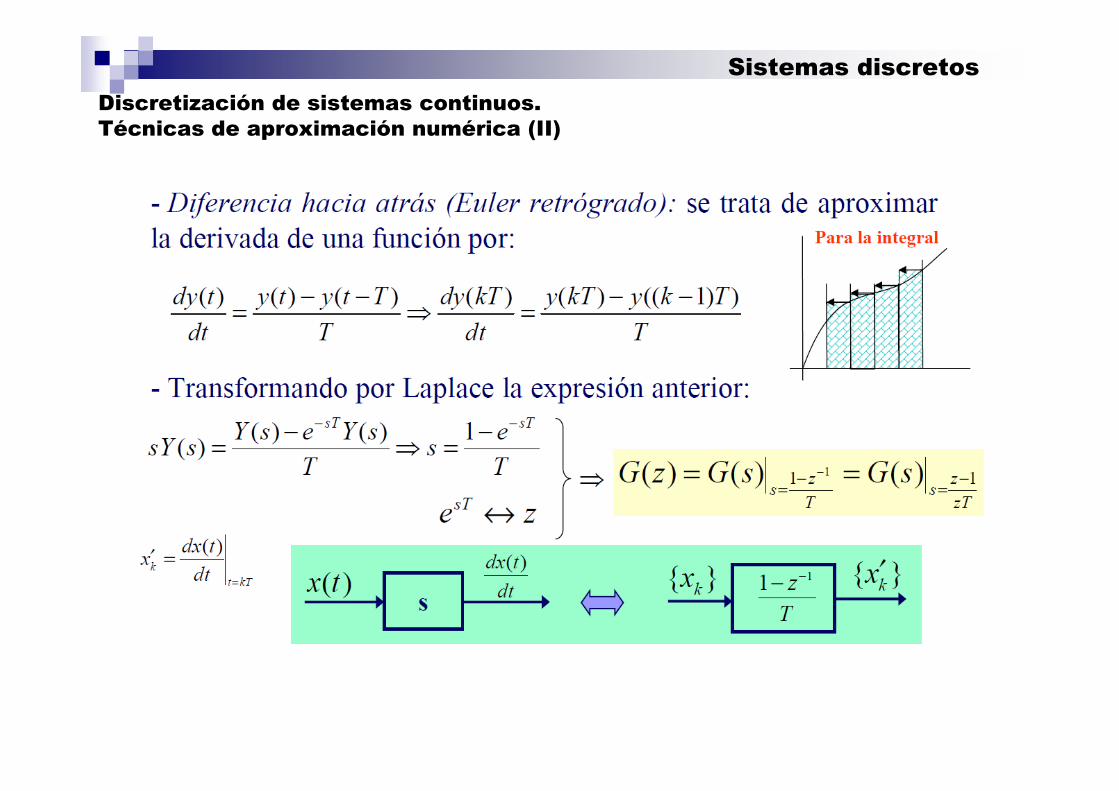
Sistemas discretos
Discretización de sistemas continuos.
Técnicas de aproximación numérica (II)
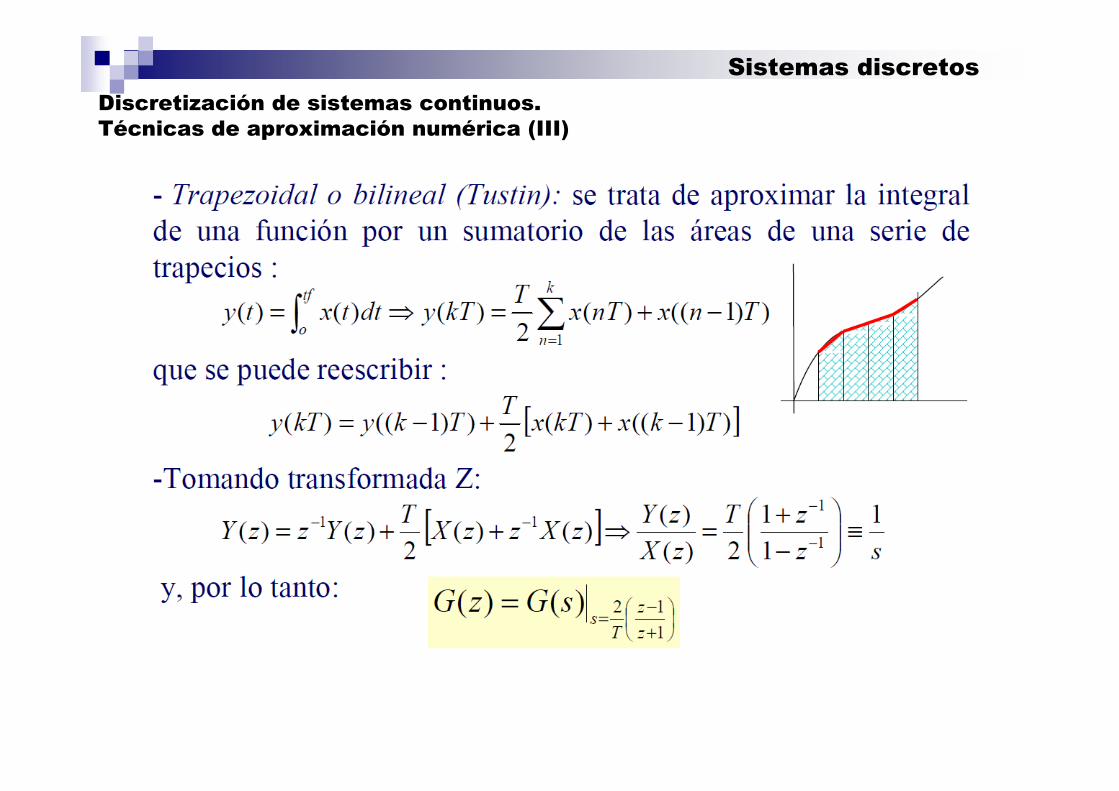
Sistemas discretos
Discretización de sistemas continuos.
Técnicas de aproximación numérica (III)
Sistemas discretos
Bibliografía.