elementos finitos ( incluye placas )
DESCRIPTION
ElasticidadTRANSCRIPT

1
ELEMENTOS FINITOS :
Introducción :
Modelos : Existen dos tipos de modelos físicos con los cuales contamos para analizar los problemas que aparecen en las distintas ramas de la física y la ingeniería :
Los modelos continuos -> derivan en sistemas de ecuaciones diferenciales.
( en problemas de elasticidad plana, del estudio de las condiciones de equilibrio del medio continuo, compatibilidad de deformaciones, y la ley de Hooke llegamos a : )
0
0
0
Luego de resolver el sistema de ecuaciones diferenciales, se obtiene una familia de soluciones para cada función incógnita ( σx, σy, τxy ).Imponiendo las condiciones de contorno, se determinan las constantes de integración. Algunos autores ( O. Belluzzi ) compara esta solución con el método de las fuerzas, debido a que, al igual que en este método, las incógnitas son magnitudes estáticas. Es conveniente recordar que a pesar de esta similitud, las incógnitas ( σx, σy, τxy ) son funciones de la coordenadas X, Y del punto, y que en el método de las fuerzas las incógnitas Xi, son constantes. En la mayoría de los casos se desconoce su solución por lo cual resultan poco prácticos; no son una herramienta de trabajo.
La solución del modelo continuo puede encararse de otra manera. Si en el sistema de ecuaciones diferenciales, a las tensiones ( σx, σy, τxy ) se las expresa en función de los desplazamientos, se obtiene un sistema de dos ecuaciones diferenciales con dos incógnitas. ( u(x, y), v(x, y) ).
μ1
=m
01
2
01
2
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
−
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
−
yu
xv
xyv
xu
ymm
yu
xv
yyv
xu
xmm
Esta forma de resolución es más conveniente cuando las condiciones de contorno afectan a los desplazamientos de los puntos de alguna zona enlazada. Al resolver el sistema de ecuaciones se obtienen las funciones u( x, y ), v( x, y ). Según los mismos

2
autores este método sería comparable al método de las deformaciones, dando lugar esta comparación a la misma salvedad.
Luego, derivando:
xv
yuxy
yvy
xux
∂∂
+∂∂
=
∂∂
=
∂∂
=
γ
ε
ε
Y teniendo en cuenta la ley de Hooke:
xyExy
yxEx
yxEx
γμ
τ
μεεμ
σ
μεεμ
σ
)1(2
)(1
)(1
2
2
+=
+−
=
+−
=
Los modelos discretos-> derivan en sistemas de ecuaciones algebraicas ( lineales ) , la solución es siempre conocida. El inconveniente de estos modelos es que para lograr precisión el número de ecuaciones del sistema puede ser excesivamente grande. Pero hoy en día, los ordenadores personales pueden manejar gran número de incógnitas sin ningún problema, siendo este el motivo fundamental por el cual los modelos discretos han desplazado a los continuos.
Este método consiste en subdividir a la estructura en subestructuras o regiones ( elementos ), y adoptar, para cada uno de estos elementos un polinomio de interpolación para las funciones u( x, y ), v( x, y ). Es lo mismo que decir que, para cada elemento, se adoptan soluciones aproximadas de las componentes u( x, y ), v( x, y ), del vector desplazamiento δ.( x, y ). El elemento con el que se discretizará ( dividirá ) a la estructura, será el elemento triangular de tres nudos de eleasticidad plana, el primero desarrollado en la década de 1940 aproximadamente., el más simple de todos. Los puntos a los cuales concurren los vértices de uno o más elementos, se llaman nudos. El próximo paso será tratar a cada uno de estos triángulos, como a un nuevo elemento de discretización, o modelación estructural, ( hasta ahora, el elemento de barra es el único conocido ) y resolver la estructura aplicando el método de las deformaciones, o de las incógnitas cinemáticas. La aplicación de este método nos obliga a conocer la matriz rigidez del elemento triangular de tres nudos de elasticidad plana.

Nues
ParaTrabexpre
es só
La a
expre
), ya de lacumpNaviearribmode
Supoestátvíncu
stro próximo
a lo cual, preajo Internoesión de es
ólo válida p
ampliación
esando al T
que, de la a Resultantplan con laer, una dimemos, tendelación coin
ongamos tetico, elásticoulo ( estruct
o objetivo, s
eviamente, o ( Ti ) deste trabajo p
ara el elem
del camp
Ti en funció
integraciónte Interna ( as hipótesis
mensión muderá a la ncida con la
Teore
( ES
ener una eso y por temtura en traz
será, por lo
deberemosl Teorema por nosotros
ento de bar
o de valid
ón de otros
n de los misRi ), en se
s dadas pocho mayor ( 1 ) en e
a del elemen
ema de l
STADO T
tructura commperatura, ezo fino SE )
tanto, arma
s ampliar elde los Tra
s conocida,
rra.
dez de la
parámetros
smos a lo laecciones dor válidas eque las otr
el caso ennto de barra
los Traba
TENSION
mo la de la el cual se ha).
ar la matriz
l campo de abajos Virt
expresión
s (
argo del áree estructuren el elemras dos ). L que la gea.
ajos Virt
NAL PLAN
fig.1, somealla en equi
rigidez del
validez de uales ( TT
del Ti, la
, para
ea, es posias que no
mento de baLa expresióneometría d
uales
NO )
etida a un elibrio con la
elemento.
la expresióTV ), ya qu
( 1 )
a alcanzar
a el estado
ble obtenernecesariamarra ( Bernn del Ti a la
del element
estado de caas reaccione
3
ón del ue, la
emos
plano
r el Ti mente noulli-a que to de
argas es de

4
A esta estructura le aplicamos los desplazamientos del SD ( estructura de la figura 1 en trazo grueso )
y medimos el trabajo realizado por las fuerzas del SE en las deformaciones del SD,
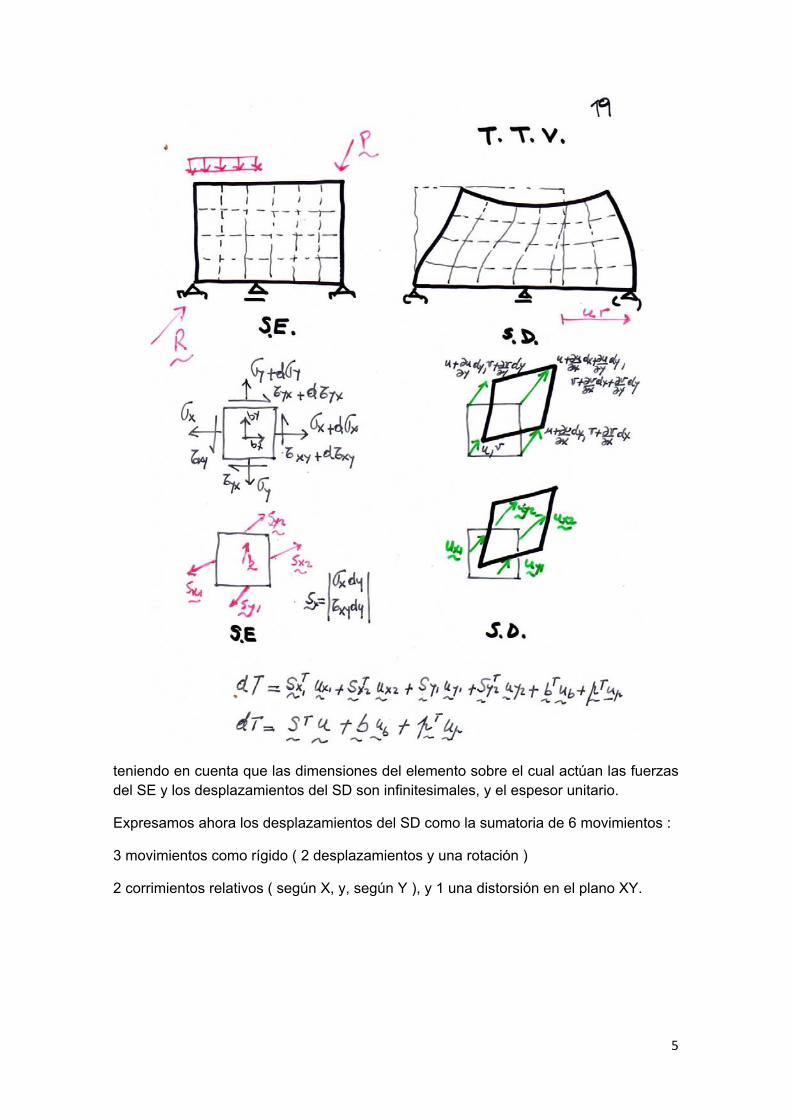
5
teniendo en cuenta que las dimensiones del elemento sobre el cual actúan las fuerzas del SE y los desplazamientos del SD son infinitesimales, y el espesor unitario.
Expresamos ahora los desplazamientos del SD como la sumatoria de 6 movimientos :
3 movimientos como rígido ( 2 desplazamientos y una rotación )
2 corrimientos relativos ( según X, y, según Y ), y 1 una distorsión en el plano XY.
6
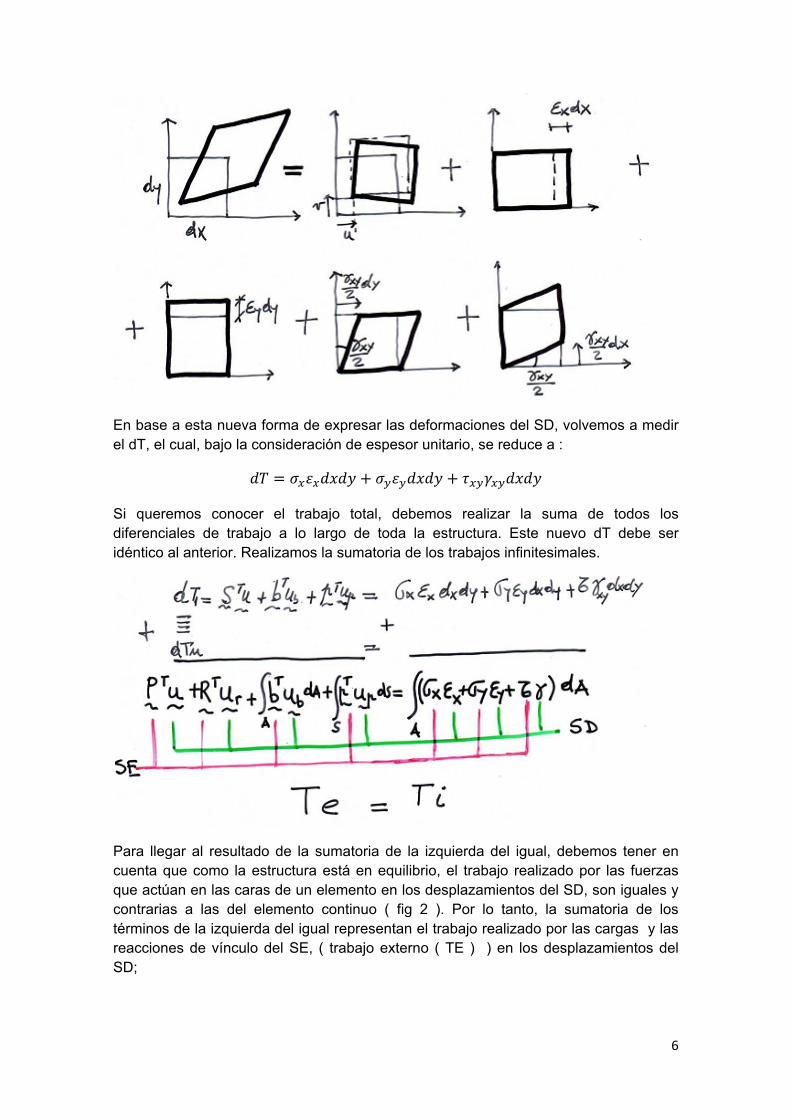
En base a esta nueva forma de expresar las deformaciones del SD, volvemos a medir el dT, el cual, bajo la consideración de espesor unitario, se reduce a :
Si queremos conocer el trabajo total, debemos realizar la suma de todos los diferenciales de trabajo a lo largo de toda la estructura. Este nuevo dT debe ser idéntico al anterior. Realizamos la sumatoria de los trabajos infinitesimales.
Para llegar al resultado de la sumatoria de la izquierda del igual, debemos tener en cuenta que como la estructura está en equilibrio, el trabajo realizado por las fuerzas que actúan en las caras de un elemento en los desplazamientos del SD, son iguales y contrarias a las del elemento continuo ( fig 2 ). Por lo tanto, la sumatoria de los términos de la izquierda del igual representan el trabajo realizado por las cargas y las reacciones de vínculo del SE, ( trabajo externo ( TE ) ) en los desplazamientos del SD;

7
fig 2
mientras que la integral de la derecha, representa el trabajo que realizan las tensiones del sistema equilibrado, en las deformaciones del SD ( Ti de deformación ).
trabajo externo realizado por el vector cargas puntuales del SE en los
desplazamientos del SD
Idem vector reacciones de vínculos.
Idem vector fuerzas de masa
Idem vector fuerzas distribuidas linealmente ( t / m )
Las dimensiones de todos los vectores que aparecen en la expresión del Te son de 2x1 ( la componente 11, es la componente según x, la componente 21, es la componente según y ). Para el caso en que sólo el vector de cargas puntuales concentradas es distinto de cero :
( 1 )
Sobre la ( 1 ), debemos destacar que es una expresión del TTV, válida para cualquier material, cumpla o no, con la ley de Hooke.
Si bien la ( 1 ) es la expresión del TTV que estábamos buscando, resultará más conveniente para nuestro objetivo ( armar la matriz rigidez del triángulo de tres nudos de elasticidad plana ) expresar al vector tensiones del sistema equilibrado, en función al vector deformaciones específicas, , del sistema equilibrado. Previo a ello, en la ( 1
8
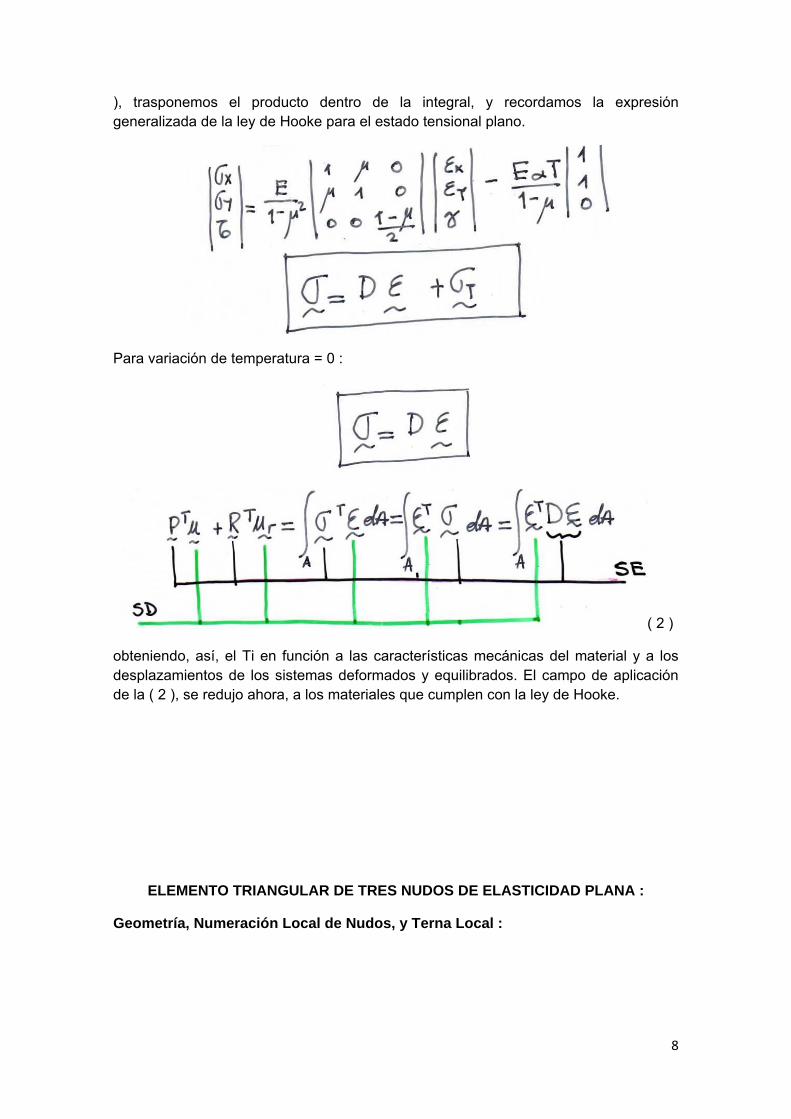
), trasponemos el producto dentro de la integral, y recordamos la expresión generalizada de la ley de Hooke para el estado tensional plano.
Para variación de temperatura = 0 :
( 2 )
obteniendo, así, el Ti en función a las características mecánicas del material y a los desplazamientos de los sistemas deformados y equilibrados. El campo de aplicación de la ( 2 ), se redujo ahora, a los materiales que cumplen con la ley de Hooke.
ELEMENTO TRIANGULAR DE TRES NUDOS DE ELASTICIDAD PLANA :
Geometría, Numeración Local de Nudos, y Terna Local :
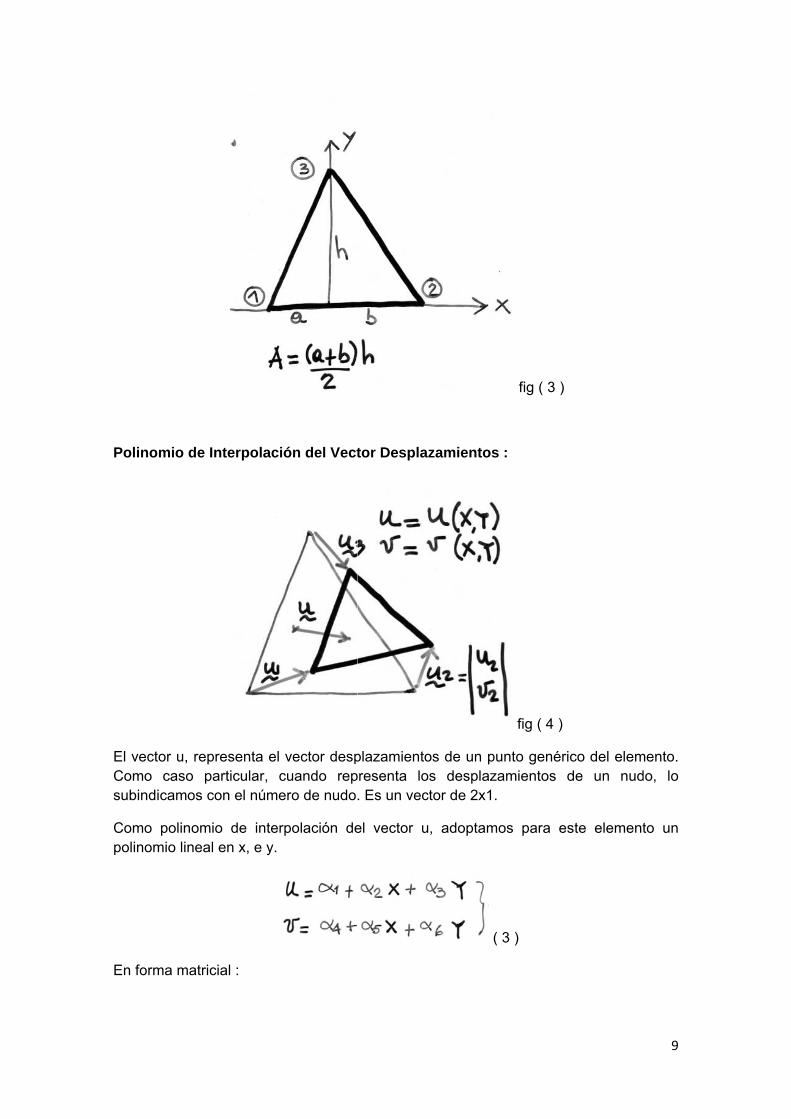
Polin
El veComsubin
Compolin
En fo
nomio de In
ector u, repmo caso pa
ndicamos c
mo polinominomio lineal
orma matric
nterpolació
resenta el varticular, con el núme
o de interpen x, e y.
cial :
ón del Vect
vector despuando repro de nudo
polación de
tor Desplaz
plazamientopresenta lo. Es un vec
el vector u
zamientos
os de un pus desplazator de 2x1.
, adoptamo
(
fig ( 3 )
:
fig ( 4 )
unto genéricamientos d
os para es
3 )
co del elemde un nud
ste element
9
mento. do, lo
to un
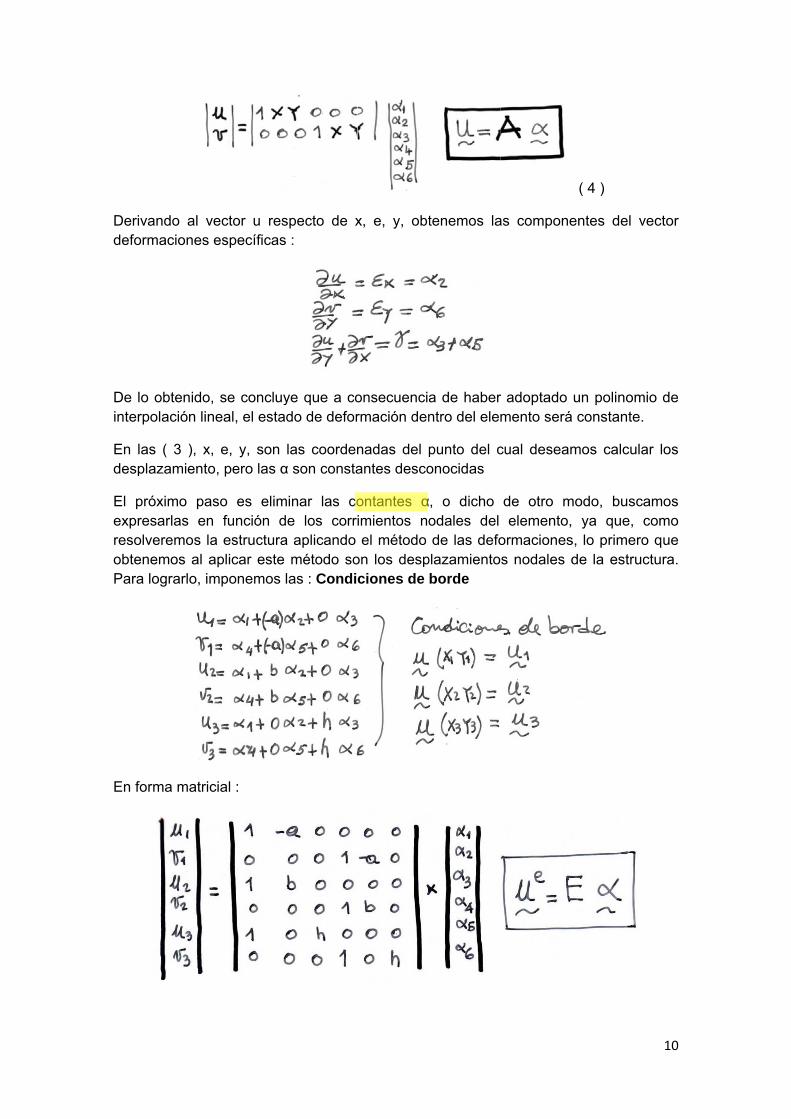
Derivdefor
De lointerp
En ladesp
El pexpreresolobtenPara
En fo
vando al vermaciones e
o obtenido, polación lin
as ( 3 ), x, plazamiento
róximo pasesarlas en lveremos lanemos al a
a lograrlo, im
orma matric
ector u resespecíficas
se concluyeal, el esta
e, y, son o, pero las α
so es elimfunción d
a estructuraaplicar este mponemos l
cial :
specto de x :
ye que a codo de defor
las coordenα son consta
minar las coe los corr
a aplicando método so
las : Condi
x, e, y, obt
onsecuenciarmación den
nadas del pantes desco
ontantes αimientos noel método
on los despciones de
tenemos la
a de haberntro del elem
punto del conocidas
, o dicho odales del de las defo
plazamientoborde
as compone
r adoptado mento será
cual deseam
de otro melemento,
ormacioness nodales d
( 4 )
entes del v
un polinomá constante.
mos calcula
modo, busca ya que,
s, lo primerode la estruc
10
vector
mio de
ar los
amos como o que ctura.

11
Siendo E, una matriz que depende de las dimensiones del elemento ( fig. 3 ), , el vector de constantes que deseamos eliminar, y , el vector de corrimientos nodales del elemento; sus dimensiones son 6x1 ( 2 corrimientos por nudo ) ( NO confundir con el vector u definido anteriormente )
Operando :
Y reemplazando en la ( 4 )
( 5 )
Realizamos el producto .
Nótese que las funciones ( llamadas, Funciones de Forma ) que aparecen en los elementos 1,1, 1,3, y, 1,5, de la matriz resultante del producto , son las mismas que aparecen en los términos 2,2, 2,4, y, 2,6. Esto, sumado al hecho de que los términos, 1,2, 1,4, 1,6, 2,1, 2,3, y, 2,5, de la misma matriz sean nulos, nos dice que el desplazamiento de un punto genérico del elemento según x, sólo depende de los desplazamientos nodales según x. Idem para el desplazamiento de un punto genérico del elemento según y.
Las funciones de forma reciben ese nombre, porque también se las utiliza para interpolar la forma de los elementos ( elementos isoparamétricos ).
Logramos expresar al vector corrimientos de un punto genérico u, en función de las coordenadas del punto ( matriz A ), de las dimensiones del elemento ( matriz inversa de E ) y el vector corrimientos nodales del elemento
Con la ( 5 ) estamos en condiciones de calcular el vector, :
De las relaciones entre corrimientos y deformaciones específicas, sabemos

En fo
Sien
un op
Llam
El hecompque para movi
orma matric
do
perador de
mando B, a , obtenem
echo de queponentes des nula la asegurar q
imiento com
cial :
derivadas p
la matriz reos :
e los términel vector sumatoriaque el polin
mo rígido de
parciales.
esultante de
nos de la mdentro del
de las filanomio de iel elemento
e aplicar el
atriz B seanl elemento s de la manterpolació.
l operador
n constanteson consta
atriz B, lo cn elegido e
L, al produ
es nos dice antes. Se ocual es condes capaz d
cto de mat
( 6 )
también quobserva adedición necee represen
12
rices,
ue las emás, esaria tar el
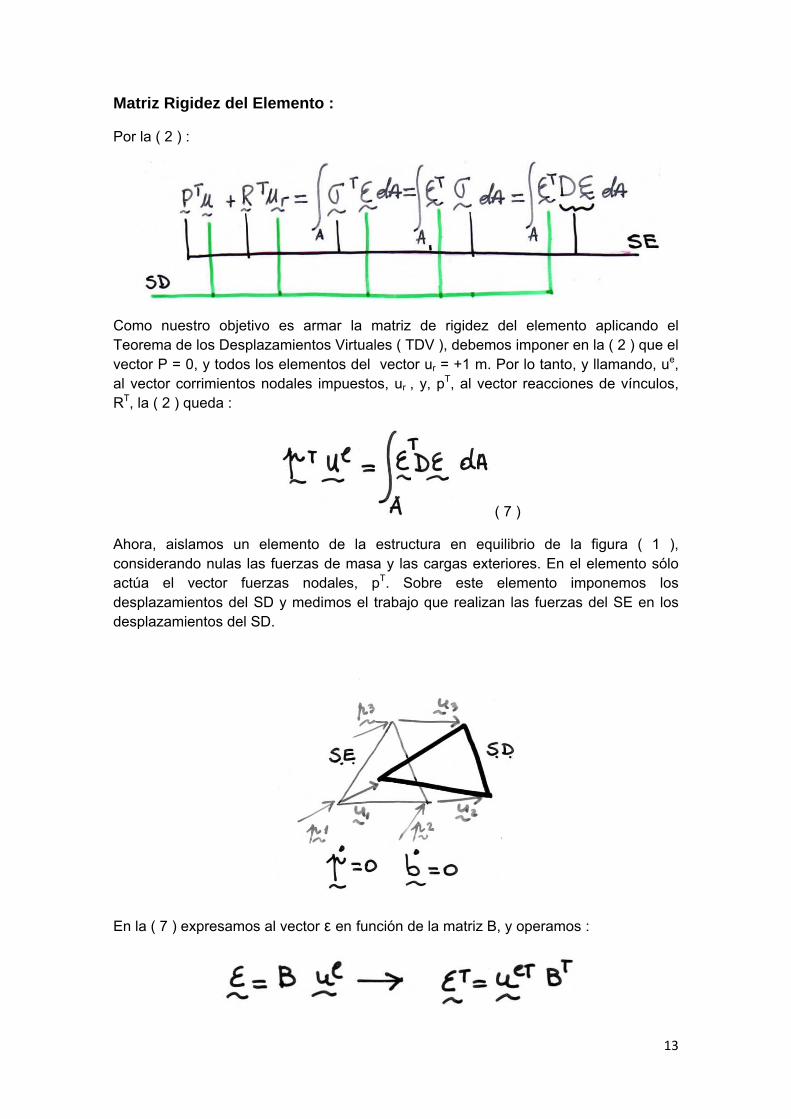
Matr
Por l
ComTeorvectoal veRT, la
Ahorconsactúadespdesp
En la
riz Rigidez
a ( 2 ) :
mo nuestro rema de losor P = 0, y ector corrima ( 2 ) qued
ra, aislamosiderando na el vect
plazamientoplazamiento
a ( 7 ) expre
z del Elem
objetivo e Desplazamtodos los e
mientos nodda :
os un elemulas las fueor fuerzas
os del SD yos del SD.
esamos al v
mento :
es armar lamientos Virtelementos dales impue
mento de lerzas de ms nodales,y medimos e
vector ε en f
a matriz deuales ( TDV
del vector ustos, ur , y,
a estructurasa y las c pT. Sobel trabajo q
función de l
e rigidez dV ), debemour = +1 m. P, pT, al vect
(
ra en equcargas extere este e
que realizan
la matriz B,
del elemenos imponer Por lo tantotor reaccion
7 )
ilibrio de lriores. En eelemento in las fuerza
y operamo
nto aplicanden la ( 2 ) q, y llamandnes de vínc
la figura ( el elementoimponemosas del SE e
os :
13
do el que el o, ue, culos,
1 ), o sólo s los en los
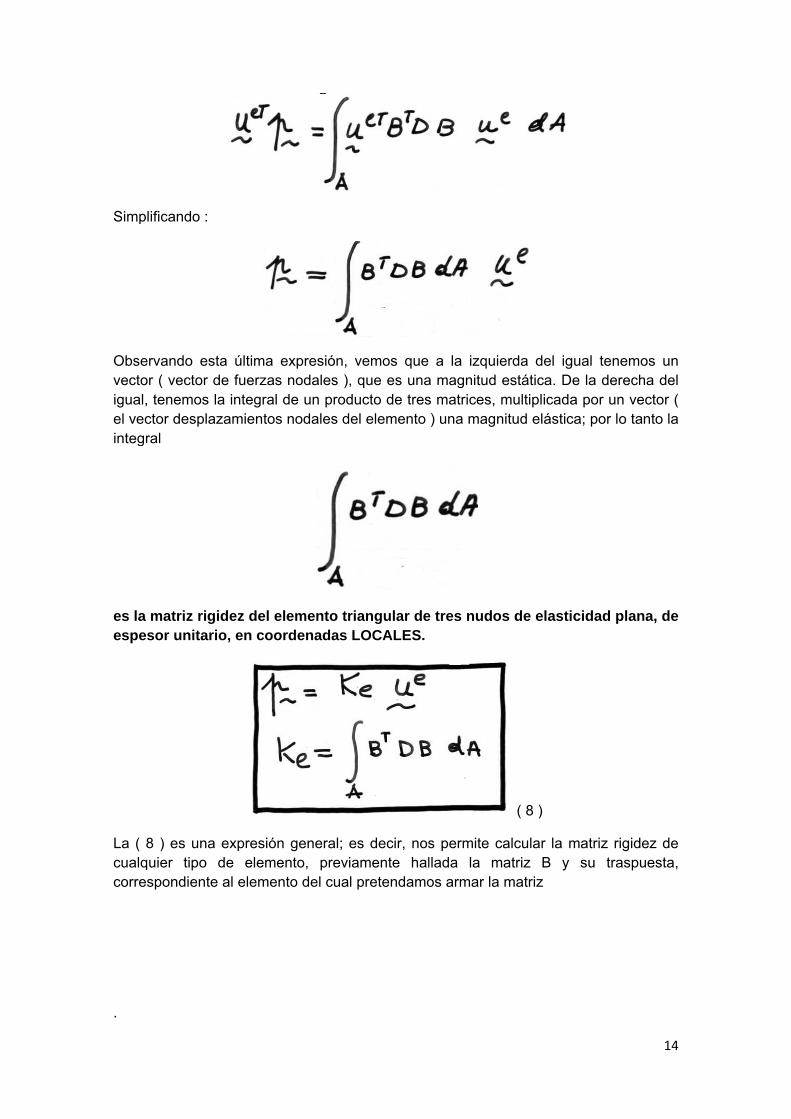
Simp
Obsevectoigualel veinteg
es laespe
La ( cualqcorre
.
plificando :
ervando esor ( vector dl, tenemos
ector desplagral
a matriz rigesor unitar
8 ) es unaquier tipo espondiente
sta última ede fuerzas la integral d
azamientos
gidez del elio, en coor
a expresión de elemen
e al element
expresión, vnodales ),
de un produnodales de
emento triardenadas L
general; esnto, previato del cual p
vemos que que es unaucto de tresel elemento
angular deLOCALES.
s decir, nosamente halpretendamo
a la izquiea magnitud s matrices, ) una magn
e tres nudo
s permite cllada la mos armar la
erda del igestática. Dmultiplicada
nitud elástic
os de elasti
( 8 )
calcular la mmatriz B y
matriz
gual tenemoe la derecha por un veca; por lo ta
cidad plan
matriz rigidesu traspu
14
os un ha del ector ( nto la
na, de
ez de uesta,

Si en
Es dcons
Matrespe
A moindicla coelegi
n la ( 8 ) ree
e notar la sstantes; nos
riz rigidez esor unitar
odo de ejemcando para olumna unoido ( lineal )
emplazamos
simplicidad sotros resolv
del elemeio, en coor
mplo, aplicauna de ellao de la ma) los lados d
s los valore
de esta intveremos la
ento triangrdenadas L
amos las incs, u1 = +1 m
atriz Ke. Nódel element
es de BT, D,
tegral debidintegral par
gular de treLOCALES.
cógnitas cinm, las fuerzótese que to deforman
y, B, y ope
do a que lara el caso e
es nudos
nemáticas czas nodales
debido al n como rect
eramos :
as matrices en que
de elastic
con valor po ( rigidecespolinomio as.
BT, D, y, B.
cidad plana
ositivo y uns ), elementode interpol
15
B, son
a, de
itario, os de ación
16
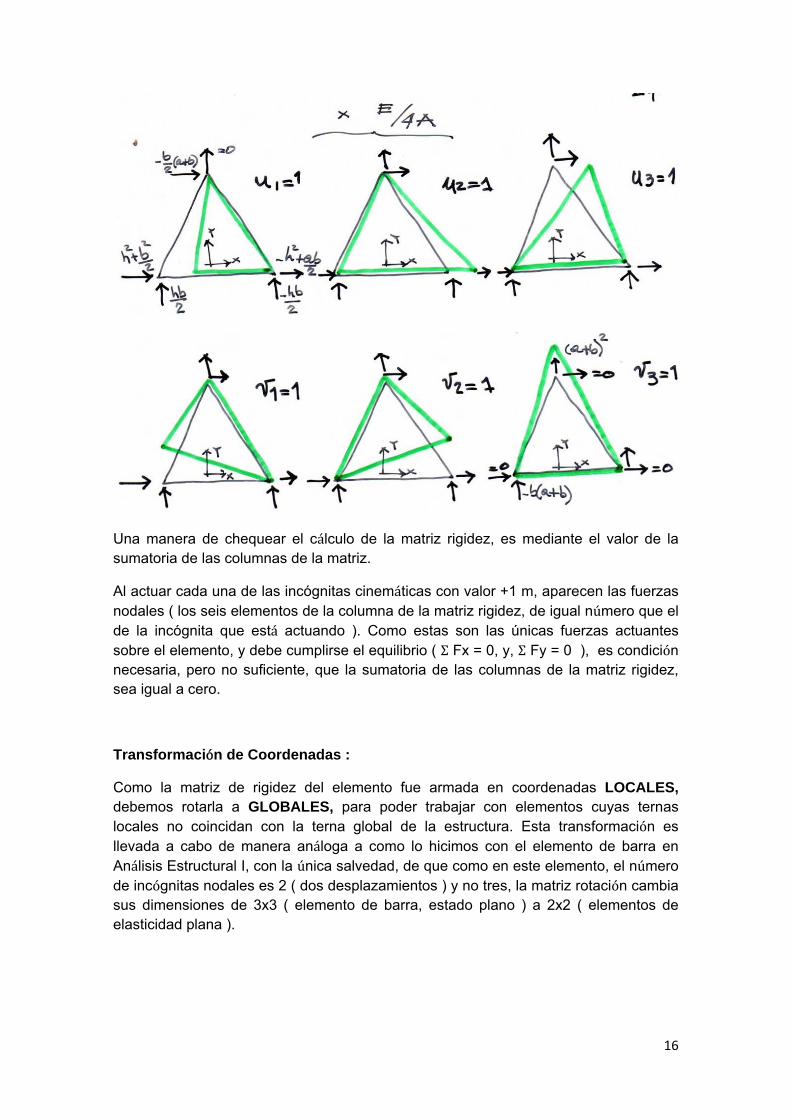
Una manera de chequear el cálculo de la matriz rigidez, es mediante el valor de la sumatoria de las columnas de la matriz.
Al actuar cada una de las incógnitas cinemáticas con valor +1 m, aparecen las fuerzas nodales ( los seis elementos de la columna de la matriz rigidez, de igual número que el de la incógnita que está actuando ). Como estas son las únicas fuerzas actuantes sobre el elemento, y debe cumplirse el equilibrio ( Σ Fx = 0, y, Σ Fy = 0 ), es condición necesaria, pero no suficiente, que la sumatoria de las columnas de la matriz rigidez, sea igual a cero.
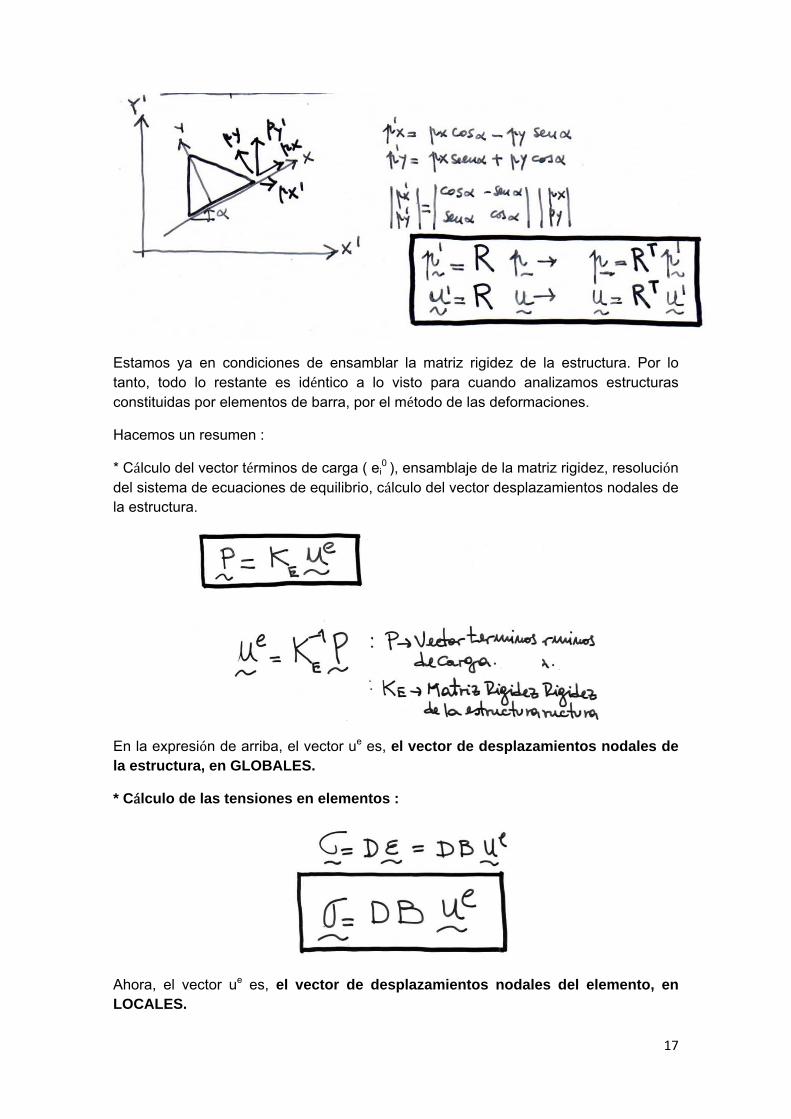
Transformación de Coordenadas :
Como la matriz de rigidez del elemento fue armada en coordenadas LOCALES, debemos rotarla a GLOBALES, para poder trabajar con elementos cuyas ternas locales no coincidan con la terna global de la estructura. Esta transformación es llevada a cabo de manera análoga a como lo hicimos con el elemento de barra en Análisis Estructural I, con la única salvedad, de que como en este elemento, el número de incógnitas nodales es 2 ( dos desplazamientos ) y no tres, la matriz rotación cambia sus dimensiones de 3x3 ( elemento de barra, estado plano ) a 2x2 ( elementos de elasticidad plana ).
17
Estamos ya en condiciones de ensamblar la matriz rigidez de la estructura. Por lo tanto, todo lo restante es idéntico a lo visto para cuando analizamos estructuras constituidas por elementos de barra, por el método de las deformaciones.
Hacemos un resumen :
* Cálculo del vector términos de carga ( ei0 ), ensamblaje de la matriz rigidez, resolución
del sistema de ecuaciones de equilibrio, cálculo del vector desplazamientos nodales de la estructura.
En la expresión de arriba, el vector ue es, el vector de desplazamientos nodales de la estructura, en GLOBALES.
* Cálculo de las tensiones en elementos :
Ahora, el vector ue es, el vector de desplazamientos nodales del elemento, en LOCALES.

18
* Cálculo de las fuerzas nodales ( vector p ) :
Conociendo la matriz rigidez del elemento, el vector , ( vector fuerzas nodales en elemento, en el fundamental sometido a las cargas ), el vector de corrimientos nodales
del elemento, , y dando por valido el principio de superposición de efectos, el
vector ( vector fuerzas nodales en el elemento en el hiperestático ) lo calculamos :
19
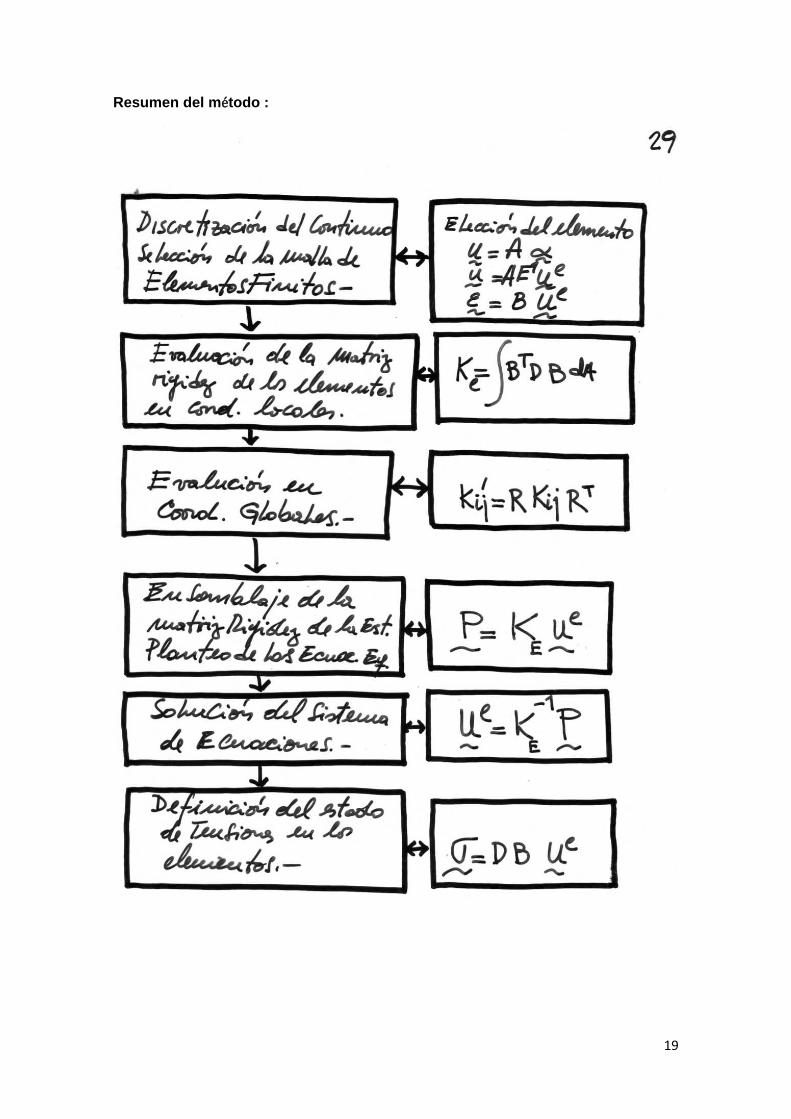
Resumen del método :
20

21
22
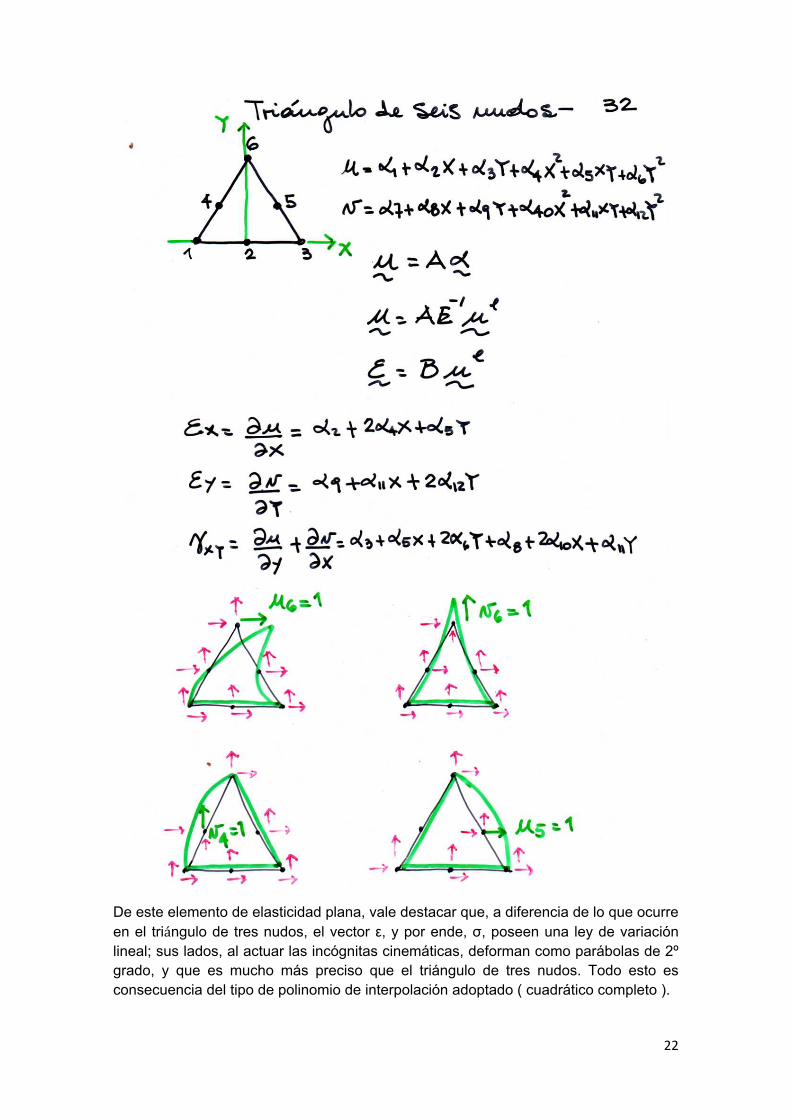
De este elemento de elasticidad plana, vale destacar que, a diferencia de lo que ocurre en el triángulo de tres nudos, el vector ε, y por ende, σ, poseen una ley de variación lineal; sus lados, al actuar las incógnitas cinemáticas, deforman como parábolas de 2º grado, y que es mucho más preciso que el triángulo de tres nudos. Todo esto es consecuencia del tipo de polinomio de interpolación adoptado ( cuadrático completo ).
23
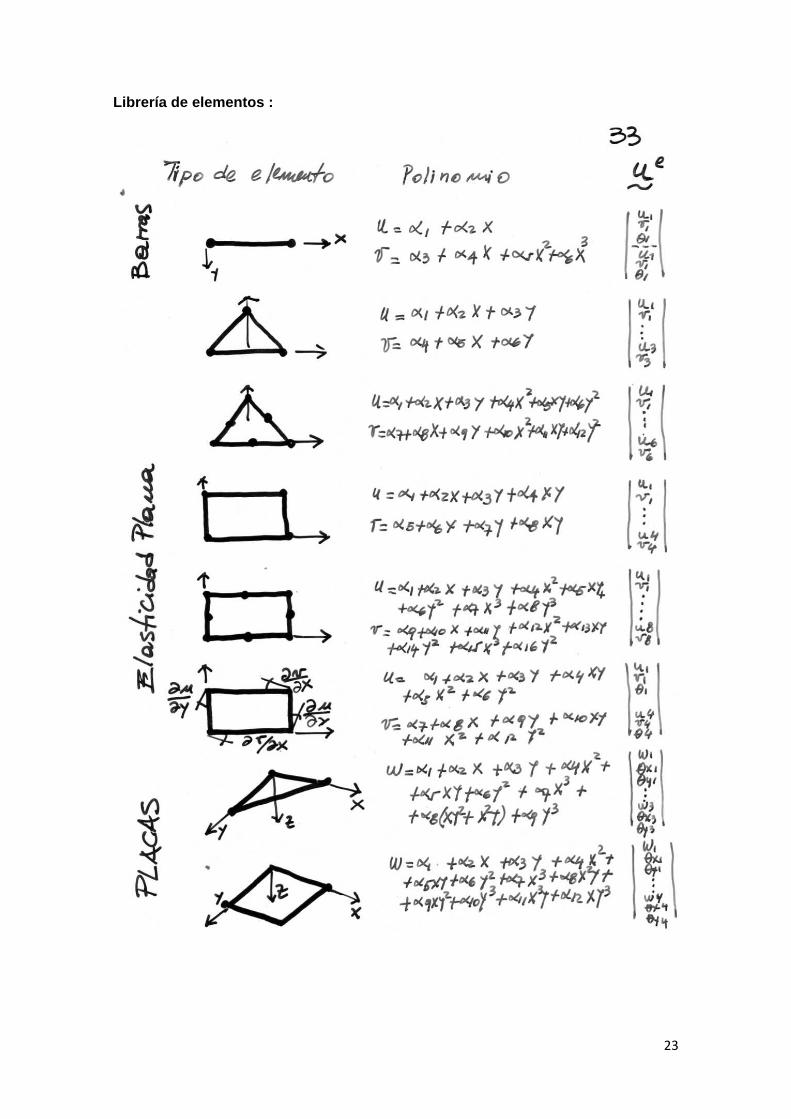
Librería de elementos :

24

25
Convergencia a la solución exacta :
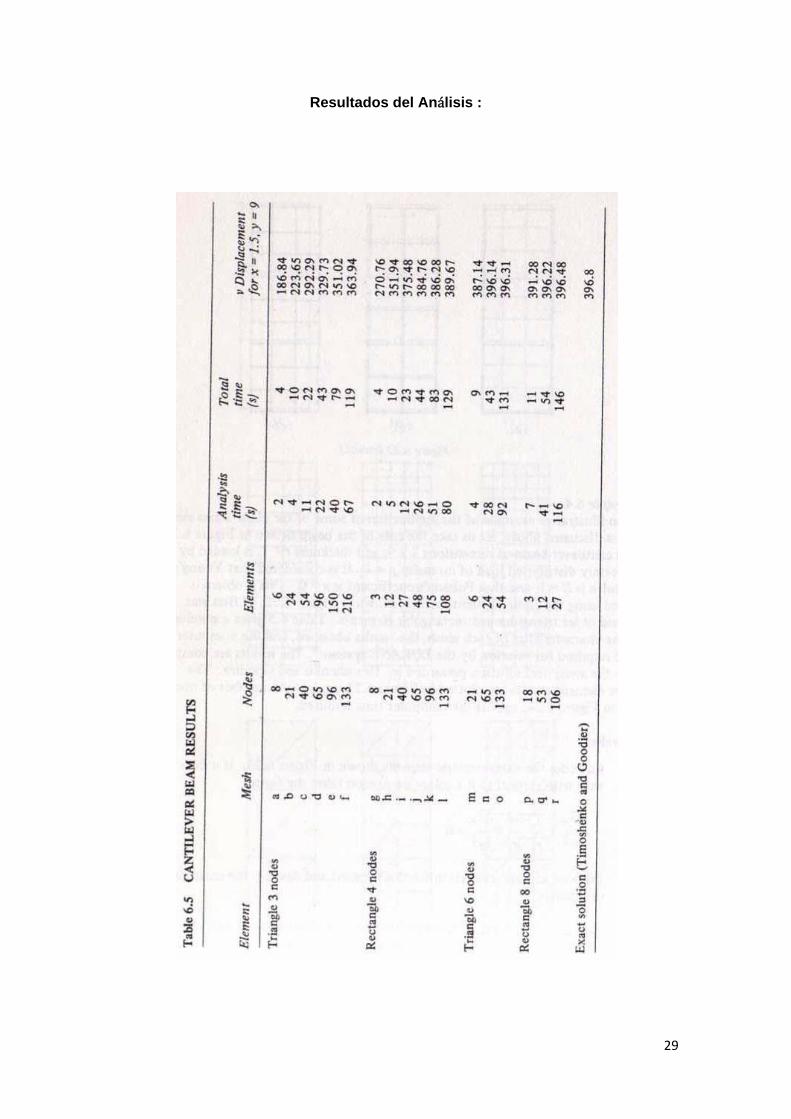
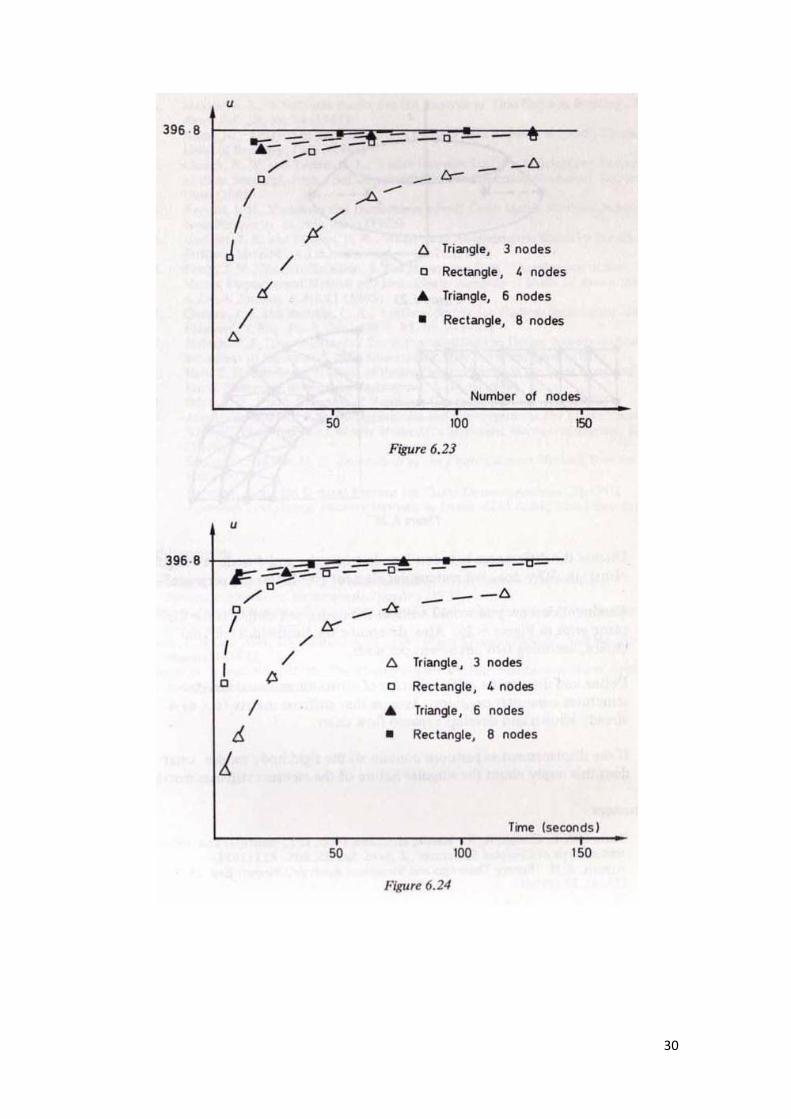
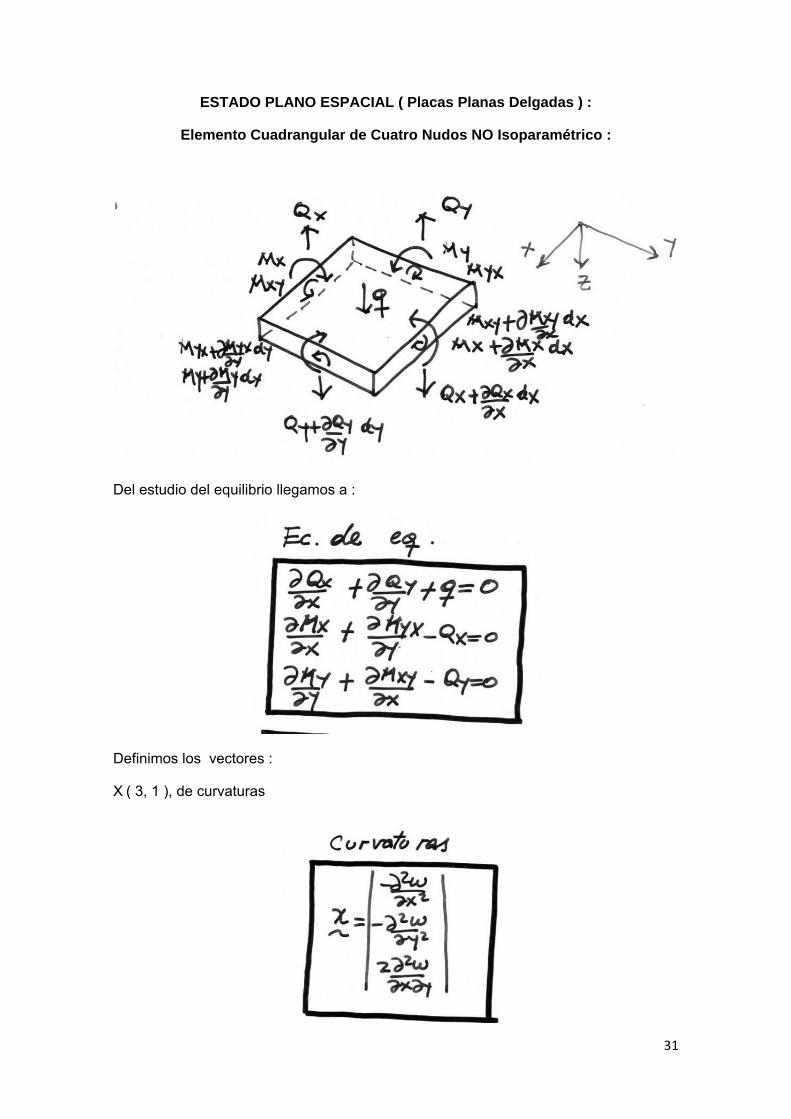
Ferrante-Brebbia, en su libro “Computational Methods For The Solution Of Engineering Problems” analizan una ménsula empotrada libre ( isostática ) por lo tanto de solución exacta conocida, y la resuelven modelándola con mallas de distinta densidad ( distintos tamaños de elementos ) y distintos tipos de elementos. Luego, en un gráfico, desplazamiento en el extremo de la ménsula, número de elementos de la malla, y tipo de elemento, analizan la convergencia de la solución. En otro gráfico, se analiza el tiempo de resolución en función a los distintos tipos de modelaciones. Existen estudios matemáticos mucho más exhaustivos referentes a la convergencia de la solución del método. Para los interesados en este tema, consultar las obras de Zienkiewicz, y, Bathe, entre otros.
Cuando hablamos de solución exacta, nos referimos a la solución a la cual arribamos, cuando calculamos el desplazamiento de una ménsula sometida a una carga uniformemente repartida, mediante la aplicación del TTV, despreciando la influencia del esfuerzo de corte.
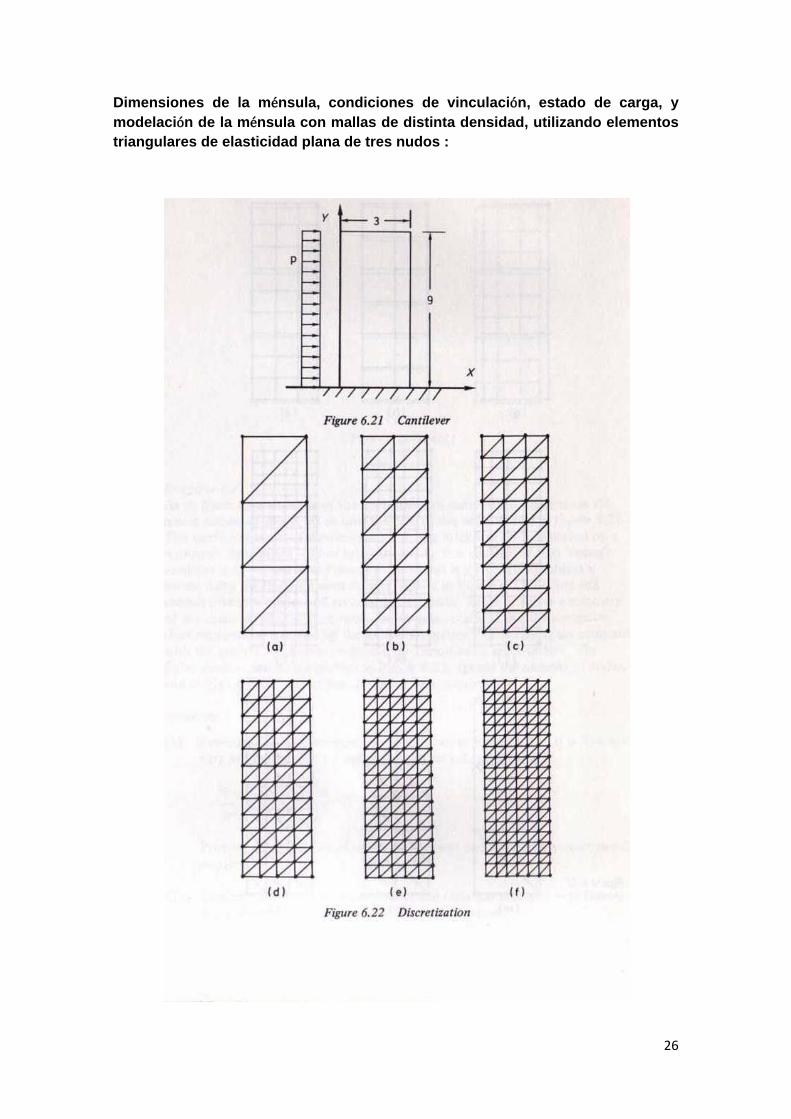
Dimensiones de la ménsula : L = 9.00 m, h = 3.00 m, espesor = 1.00 m
Características mecánicas del material : E = 1 t / m2, μ = 0, p = 1 t / m
26
Dimensiones de la ménsula, condiciones de vinculación, estado de carga, y modelación de la ménsula con mallas de distinta densidad, utilizando elementos triangulares de elasticidad plana de tres nudos :
27
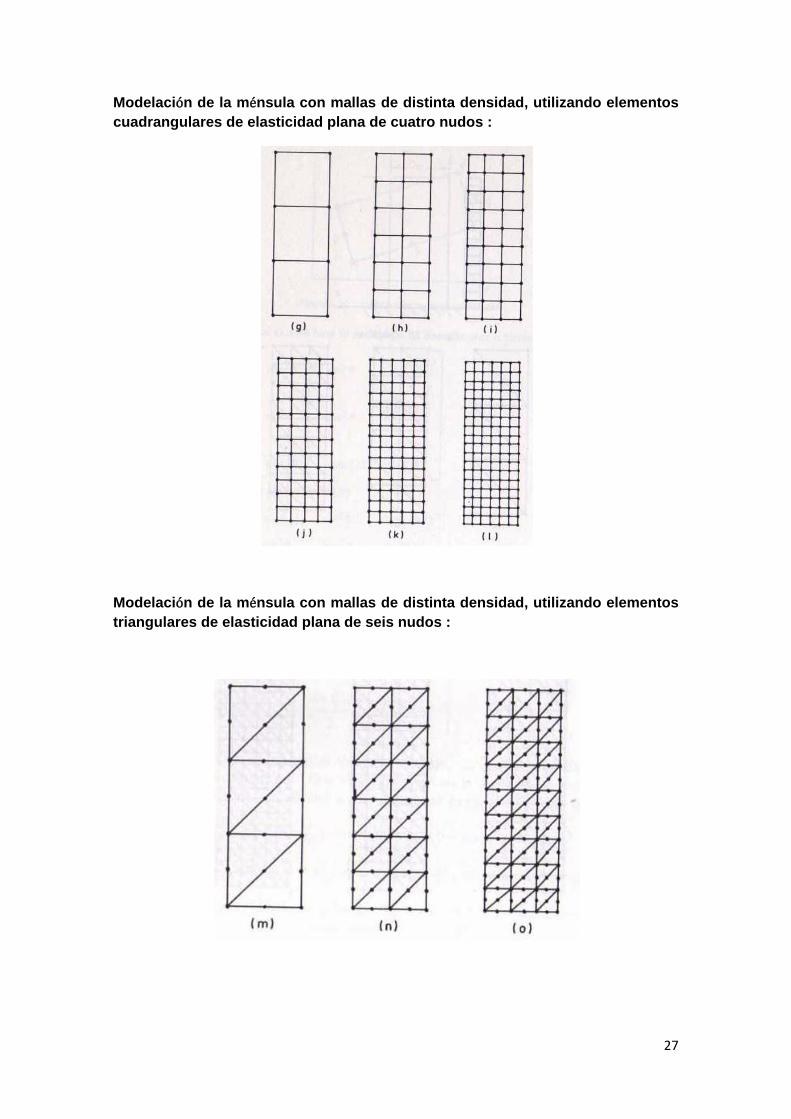
Modelación de la ménsula con mallas de distinta densidad, utilizando elementos cuadrangulares de elasticidad plana de cuatro nudos :
Modelación de la ménsula con mallas de distinta densidad, utilizando elementos triangulares de elasticidad plana de seis nudos :
28
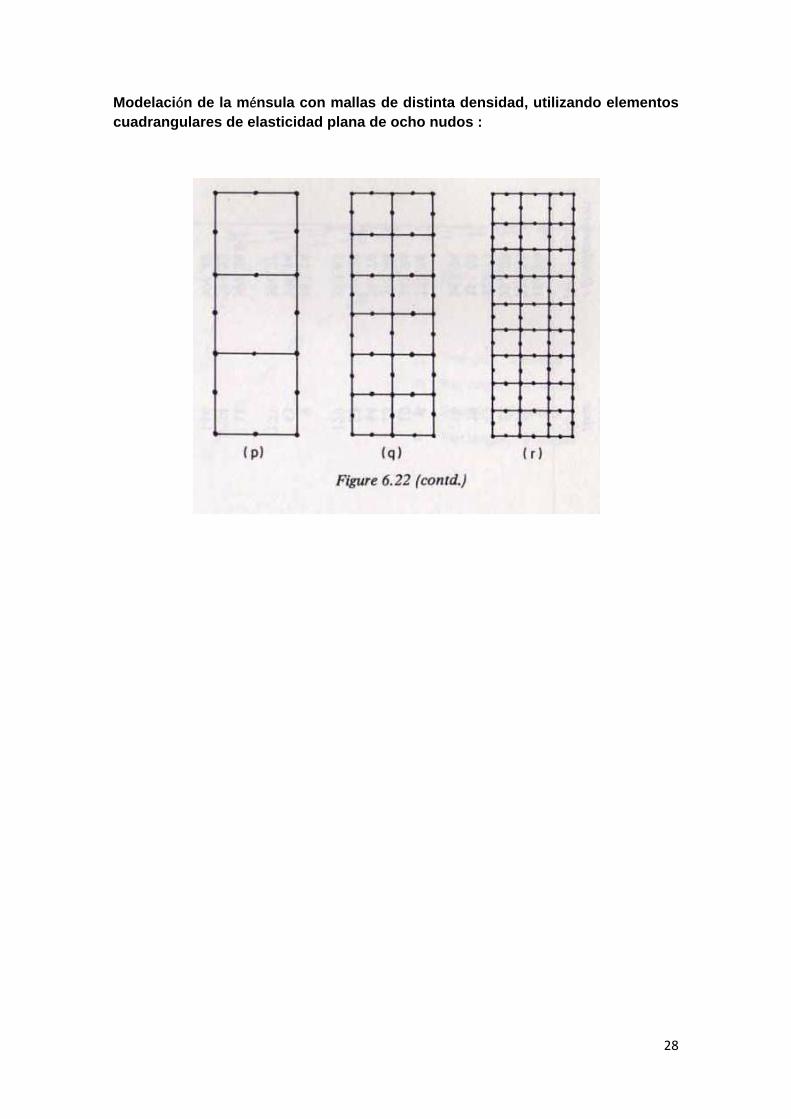
Modelación de la ménsula con mallas de distinta densidad, utilizando elementos cuadrangulares de elasticidad plana de ocho nudos :
29
Resultados del Análisis :
30
31
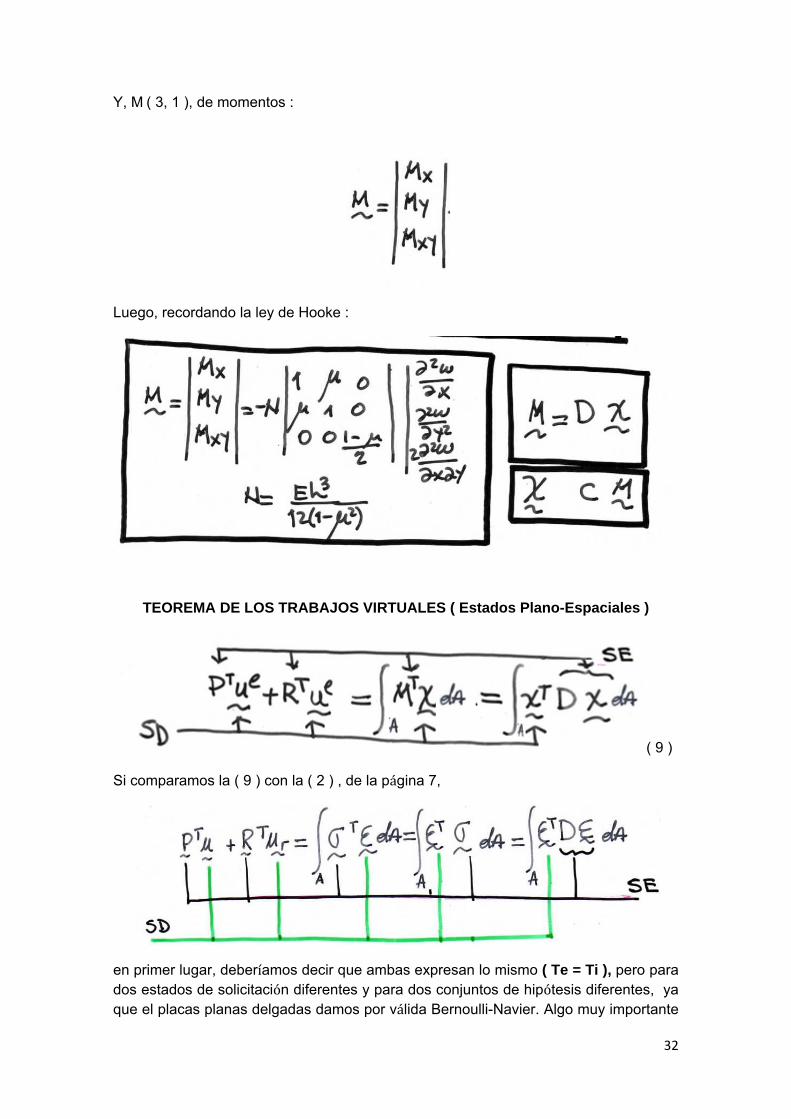
ESTADO PLANO ESPACIAL ( Placas Planas Delgadas ) :
Elemento Cuadrangular de Cuatro Nudos NO Isoparamétrico :
Del estudio del equilibrio llegamos a :
Definimos los vectores :
Χ ( 3, 1 ), de curvaturas
32
Y, M ( 3, 1 ), de momentos :
Luego, recordando la ley de Hooke :
TEOREMA DE LOS TRABAJOS VIRTUALES ( Estados Plano-Espaciales )
( 9 )
Si comparamos la ( 9 ) con la ( 2 ) , de la página 7,
en primer lugar, deberíamos decir que ambas expresan lo mismo ( Te = Ti ), pero para dos estados de solicitación diferentes y para dos conjuntos de hipótesis diferentes, ya que el placas planas delgadas damos por válida Bernoulli-Navier. Algo muy importante
33
de destacar, también, es la diferencia entre las dimensiones cinemáticas entre ambos estados. Para los estados planos, teníamos 2 incógnitas cinemáticas por nudo ( dos desplazamientos s / X, y, s / Y ). En cambio, en placas, teníamos tres incógnitas cinemáticas por nudo ( un desplazamiento s / Z, dos rotaciones, s / X y, s / Y ). Por lo tanto, también serán diferentes las dimensiones de los vectores, cargas y fuerzas nodales, y desplazamientos nodales del elemento. Todos serán de 3 x el número de nudos del elemento ( 3 x 4 = 12, para el elemento que estamos estudiando ).
Analizamos brevemente la expresión del trabajo interno. Como puede verse en la ( 9 ), el mismo está dado por el trabajo que realizan los momentos flectores y torsores del SE, en las curvaturas del SD. Esto es así, porque si analizamos un elemento de placa de dimensiones infinitesimales, y calculamos el trabajo realizado por Mx, este sería igual a : Mx*dy*dθy. Si multiplicamos y dividimos esta expresión por dx, nos queda :
, siendo : , , , por lo cual, el trabajo interno realizado
por Mx, en función a la curvatura queda : . Luego, por analogía, se obtienen los trabajos internos realizados por My, y por Mxy : , . En forma matricial, llegamos a la expresión ( 2 ).
MATRIZ DE RIGIDEZ DEL ELEMENTO CUADRANGULAR DE CUATRO NUDOS NO ISOPARAMÉTRICO DE ELASTICIDAD PLANO-ESPACIAL :
POLINOMIO DE INTERPOLACIÓN :
A pesar de que en los problemas de elasticidad plano espacial, el número de incógnitas nodales es 3, ( un desplazamiento s / z, W ( x, y ), una rotación en el plano xz ( , y una rotación en el plano yz ( ), la variable a interpolar es, la flecha del plano medio de la placa, W ( x,y ). Esto es así, debido a que bajo nuestras hipótesis de partida, las rotaciones la obtenemos como derivadas primeras de la función W ( x, y ). Por lo tanto, adoptaremos un solo polinomio de interpolación.
( 10 )
La ( 10 ) es un polinomio de 4º grado, incompleto, porque faltan los términos x4, x2y2, y4.
En forma matricial :
34
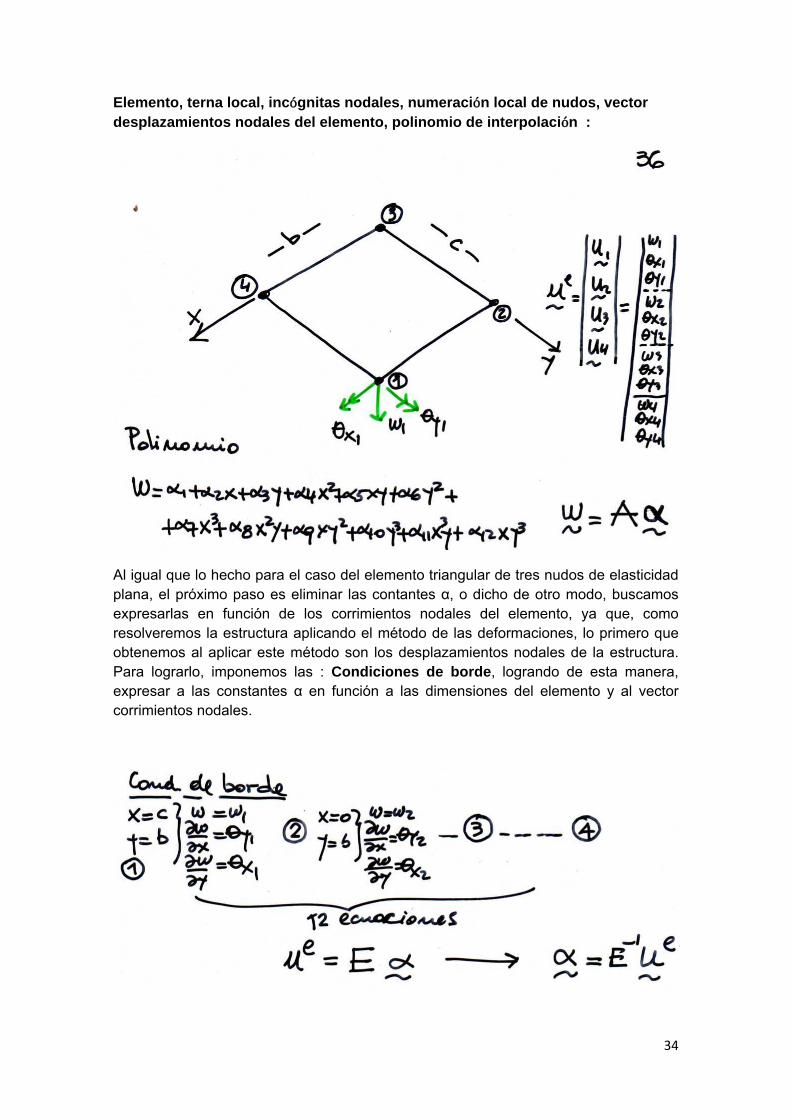
Elemento, terna local, incógnitas nodales, numeración local de nudos, vector desplazamientos nodales del elemento, polinomio de interpolación :
Al igual que lo hecho para el caso del elemento triangular de tres nudos de elasticidad plana, el próximo paso es eliminar las contantes α, o dicho de otro modo, buscamos expresarlas en función de los corrimientos nodales del elemento, ya que, como resolveremos la estructura aplicando el método de las deformaciones, lo primero que obtenemos al aplicar este método son los desplazamientos nodales de la estructura. Para lograrlo, imponemos las : Condiciones de borde, logrando de esta manera, expresar a las constantes α en función a las dimensiones del elemento y al vector corrimientos nodales.
35
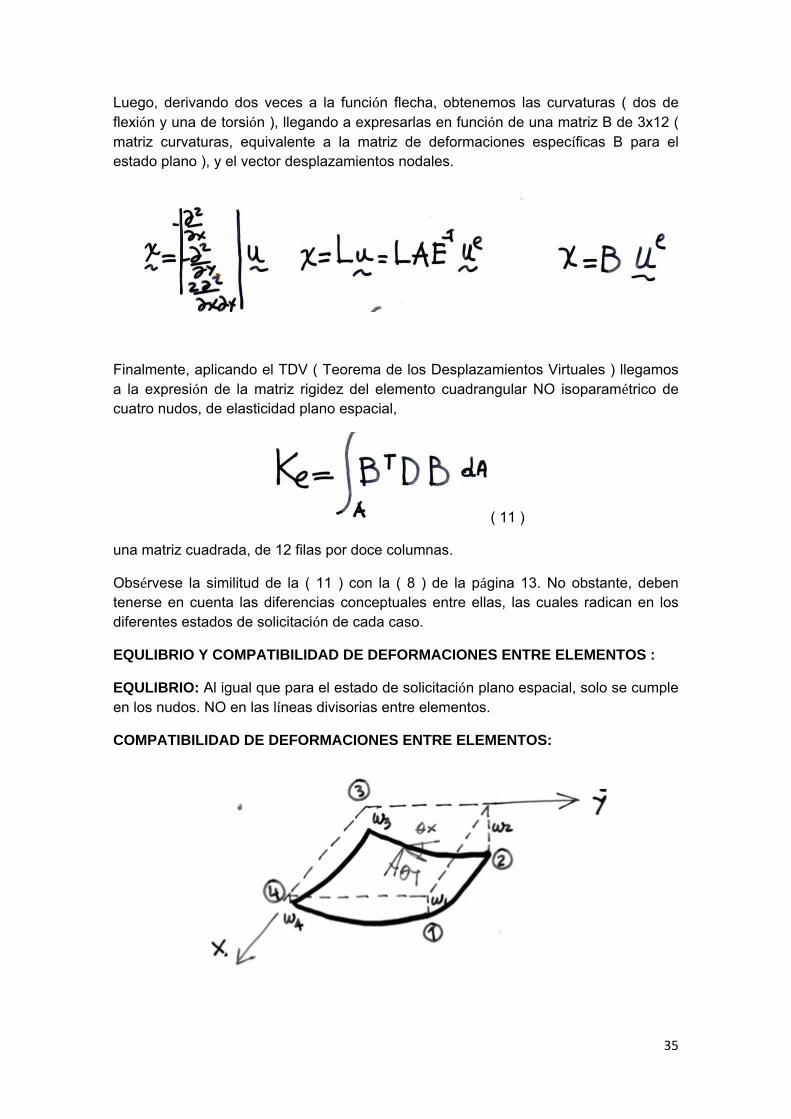
Luego, derivando dos veces a la función flecha, obtenemos las curvaturas ( dos de flexión y una de torsión ), llegando a expresarlas en función de una matriz B de 3x12 ( matriz curvaturas, equivalente a la matriz de deformaciones específicas B para el estado plano ), y el vector desplazamientos nodales.
Finalmente, aplicando el TDV ( Teorema de los Desplazamientos Virtuales ) llegamos a la expresión de la matriz rigidez del elemento cuadrangular NO isoparamétrico de cuatro nudos, de elasticidad plano espacial,
( 11 )
una matriz cuadrada, de 12 filas por doce columnas.
Obsérvese la similitud de la ( 11 ) con la ( 8 ) de la página 13. No obstante, deben tenerse en cuenta las diferencias conceptuales entre ellas, las cuales radican en los diferentes estados de solicitación de cada caso.
EQULIBRIO Y COMPATIBILIDAD DE DEFORMACIONES ENTRE ELEMENTOS :
EQULIBRIO: Al igual que para el estado de solicitación plano espacial, solo se cumple en los nudos. NO en las líneas divisorias entre elementos.
COMPATIBILIDAD DE DEFORMACIONES ENTRE ELEMENTOS:

36
Condiciones de borde:
Para x = 0 ( lado definido por los nudos 3 a 4 )
0,
0, 2 3
0,
,
,
Ahora, sobre el lado 34, nos paramos en los puntos, y = 0 ( nudo 3 ), e y = c ( nudo 2 ) y reemplazamos valores en las 11.
Nudo 3 ( x = 0, y = 0 ) :
0, 0 0 0 0 ( 12 )
0, 0 2 0 3 0 ( 13 )
0, 0 0 0 ( 14 )
Del planteo de las condiciones de contorno en este nudo, obtuvimos los valores de las contantes , , pero no los de las ,
Nudo 2 ( x = 0, y = c ) :
0,
0, 2 3
Del planteo de 2 de las condiciones de contorno en este nudo, obtuvimos un sistema de dos ecuaciones con 2 incógnitas,
Planteamos la tercera condición de contorno en el nudo 2,
0, ( 15 )
La ( 15 ) es una ecuación con cuatro incógnitas , , , . La combinamos con la ( 14 ), única ecuación en la cual aparecen , , obteniendo un sistema de dos ecuaciones con 4 incógnitas , , , . Esto último nos dice que no será posible lograr la compatibilidad de las rotaciones en el plano xz, entre líneas divisorias de elementos, ya que las constantes del polinomio , , , . se hallan indeterminadas; pero sí en el `plano yz, y en los desplazamientos, ya que las constantes de estos polinomios ( , , , se hallan perfectamente determinadas. Esta indeterminación, es lo que le da a la deformada de la figura su aspecto tan particular.

37