elementos de mecatrónica - up...
TRANSCRIPT

Elementos de Mecatrónica
Dr. José Sebastián Gutiérrez Calderón Profesor Investigador - Ingenierías UP [email protected]

Temas generales del curso • Conceptos básicos de la mecatrónica
• Características principales de los transductores
• Sensores y sistemas de medición
• Actuadores y mandos
• Mecanismos para la automatización
• Control por computadora
2

Unidad 4: Actuadores y mandos (continuación…)
3

4
Actuadores
Músculos neumáticos

Músculo neumático Es un actuador de tracción que funciona como un músculo humano, capaz de generar una fuerza de tracción inicial muy grande.
5
Actuadores
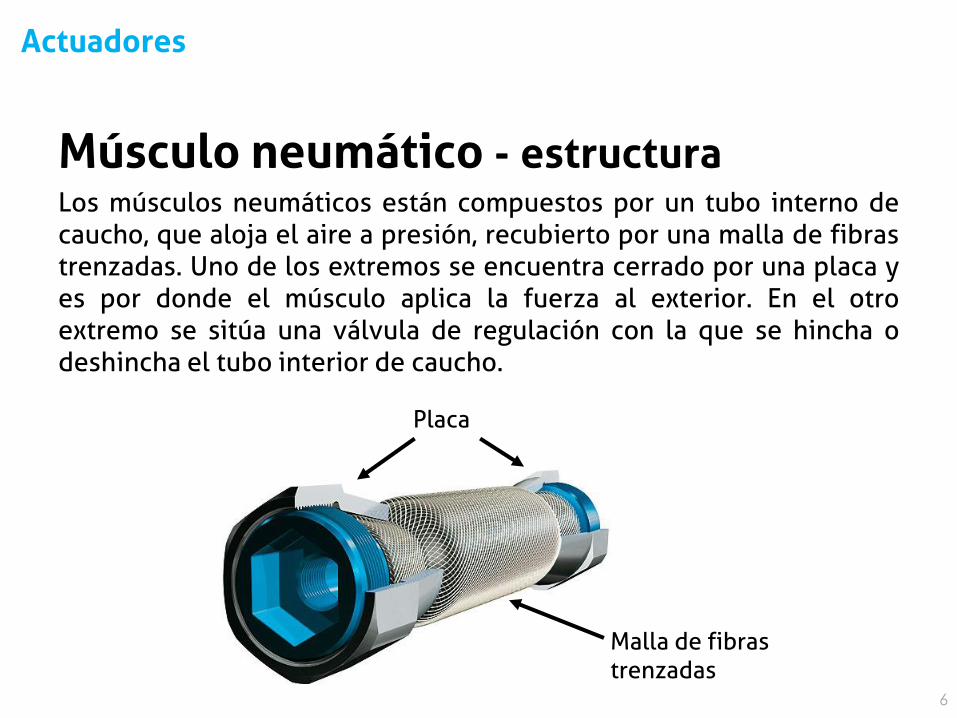
Músculo neumático - estructura Los músculos neumáticos están compuestos por un tubo interno de caucho, que aloja el aire a presión, recubierto por una malla de fibras trenzadas. Uno de los extremos se encuentra cerrado por una placa y es por donde el músculo aplica la fuerza al exterior. En el otro extremo se sitúa una válvula de regulación con la que se hincha o deshincha el tubo interior de caucho.
6
Actuadores
Malla de fibras trenzadas
Placa

Músculo neumático - funcionamiento Al introducir aire a presión en el tubo de caucho este se hincha expandiéndose en sentido transversal, lo cual provoca en la malla de fibras una tensión en sentido tangencial al tubo de caucho y ortogonal al eje de rotación del mismo, convirtiéndose en un desplazamiento y una fuerza en sentido axial.
La malla de fibras inextensibles está trenzada en forma de rombo, como se muestra a continuación:
7
Actuadores
transversal
axial

Músculo neumático - ventajas Actuador de gran fuerza y carrera corta, sin movimientos a tirones.
Fuerza diez veces superior a la de un cilindro de dimensiones semejantes.
Robusto e incluso se puede utilizar en condiciones extremas, como las existentes en entornos con arena o polvo.
Regulación sencilla de las posiciones intermedias mediante ajuste de la presión.
Liviano, hermético y sin fugas.
8
Actuadores

Músculos neumáticos - MAS En el MAS, la fijación de la membrana se realiza mediante una unión roscada.
9
Tamaños: 10, 20, 40 mm Longitudes nominales: 40 a 9000 mm Fuerzas de elevación: 480 a 6000 N Conexión atornillada
Actuadores

Músculo neumático - DMSP En el DMSP, la membrana está comprimida sobre un casquillo y los adaptadores están integrados.
Además, el DMSP destaca respecto al MAS por su construcción compacta (sección un 25% inferior, 30% menos de peso).
10
Tamaños: 10, 20, 40 mm Longitudes nominales: 40 a 9000 mm Fuerzas de elevación: 480 a 6000 N Conexión prensada
Actuadores

Músculo neumático - fuerza y carga La longitud nominal del músculo neumático se determina sin
presión.
El valor corresponde a la longitud visible de la membrana entre los elementos de fijación.
El músculo se expande si es sometido a una fuerza de tracción externa. Al aplicar presión se produce una contracción del músculo con lo que su longitud es menor.
Para determinar el tipo de músculo neumático necesario para cualquier aplicación, se puede simular utilizando el siguiente software: MuscleSim - http://goo.gl/j5g6ML
11
Actuadores

Músculo neumático - aplicaciones Puede utilizarse para una gran cantidad de aplicaciones: industria automovilística, automatización de procesos industriales en general, técnicas médicas, técnicas de simulación, industria de la impresión, técnicas de edificaciones y, por supuesto, automatización industrial.
12
Actuadores
Músculo neumático - aplicaciones
Fuerza y dinamismo
13
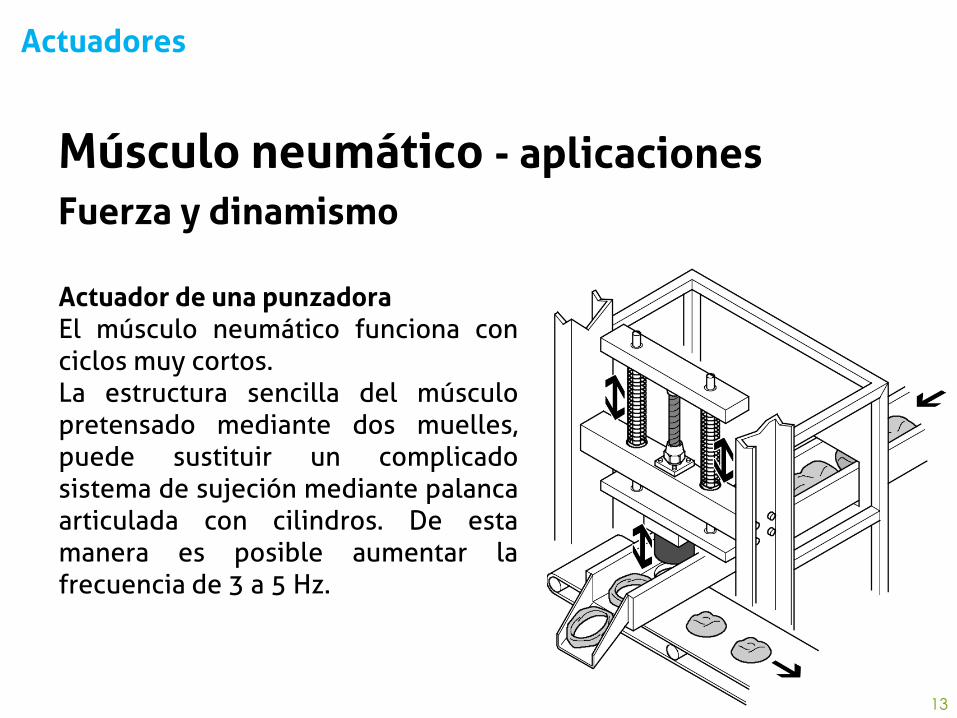
Actuador de una punzadora El músculo neumático funciona con ciclos muy cortos. La estructura sencilla del músculo pretensado mediante dos muelles, puede sustituir un complicado sistema de sujeción mediante palanca articulada con cilindros. De esta manera es posible aumentar la frecuencia de 3 a 5 Hz.
Actuadores
Músculo neumático - aplicaciones
Fuerza y dinamismo
14
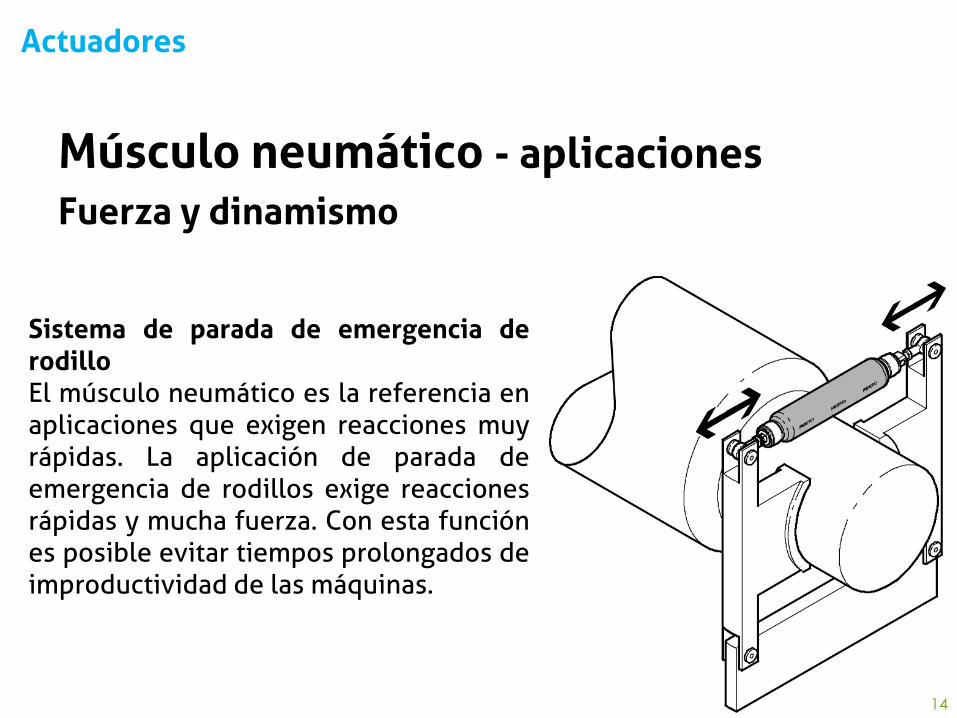
Sistema de parada de emergencia de rodillo El músculo neumático es la referencia en aplicaciones que exigen reacciones muy rápidas. La aplicación de parada de emergencia de rodillos exige reacciones rápidas y mucha fuerza. Con esta función es posible evitar tiempos prolongados de improductividad de las máquinas.
Actuadores

Músculo neumático - aplicaciones
Fuerza y dinamismo
15
Accionamiento de un desvío El músculo neumático es el actuador ideal para tareas de clasificación y frenado de piezas en sistemas de transporte: es capaz de ejecutar movimientos muy rápidos y su aceleración es inmediata. Gracias a su respuesta inmediata, es posible obtener ciclos muy cortos.
Actuadores

Músculo neumático - aplicaciones
Movimientos sin tirones
16
Freno en un equipo rebobinado El músculo neumático ejecuta los movimientos sin fricción, por lo que es posible frenar suavemente el tambor. Ello significa que la operación de bobinado es extremadamente precisa ya que el movimiento es constante. El control está a cargo de una válvula proporcional, cuyas señales se regulan mediante detectores de la fuerza.
Actuadores
Músculo neumático - aplicaciones
Movimientos sin tirones
17
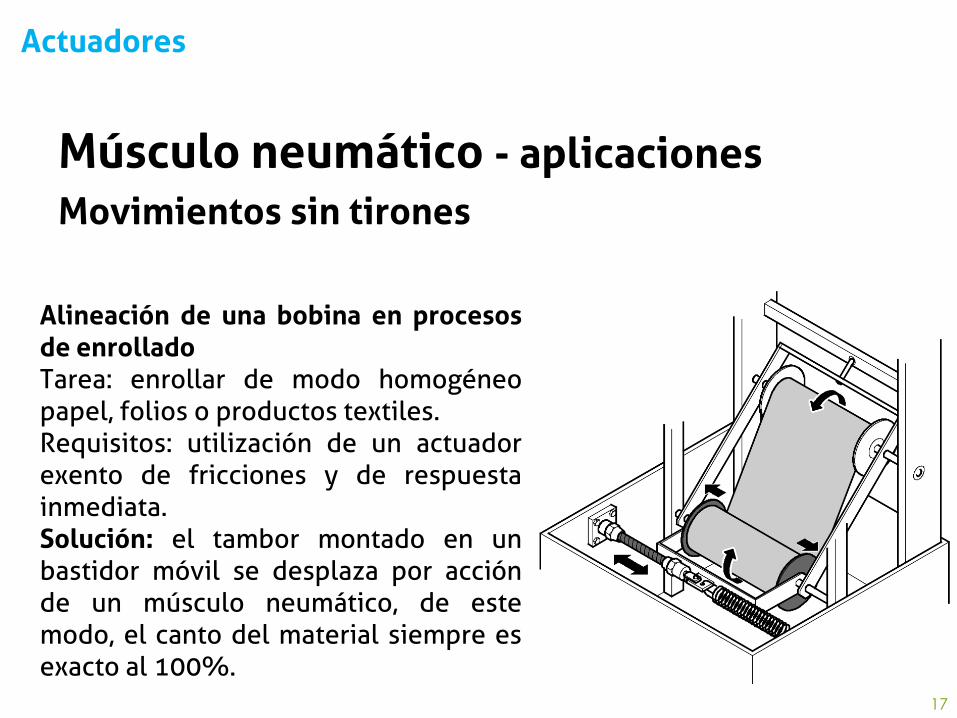
Alineación de una bobina en procesos de enrollado Tarea: enrollar de modo homogéneo papel, folios o productos textiles. Requisitos: utilización de un actuador exento de fricciones y de respuesta inmediata. Solución: el tambor montado en un bastidor móvil se desplaza por acción de un músculo neumático, de este modo, el canto del material siempre es exacto al 100%.
Actuadores
Músculo neumático - aplicaciones
Sistema de posicionamiento
18
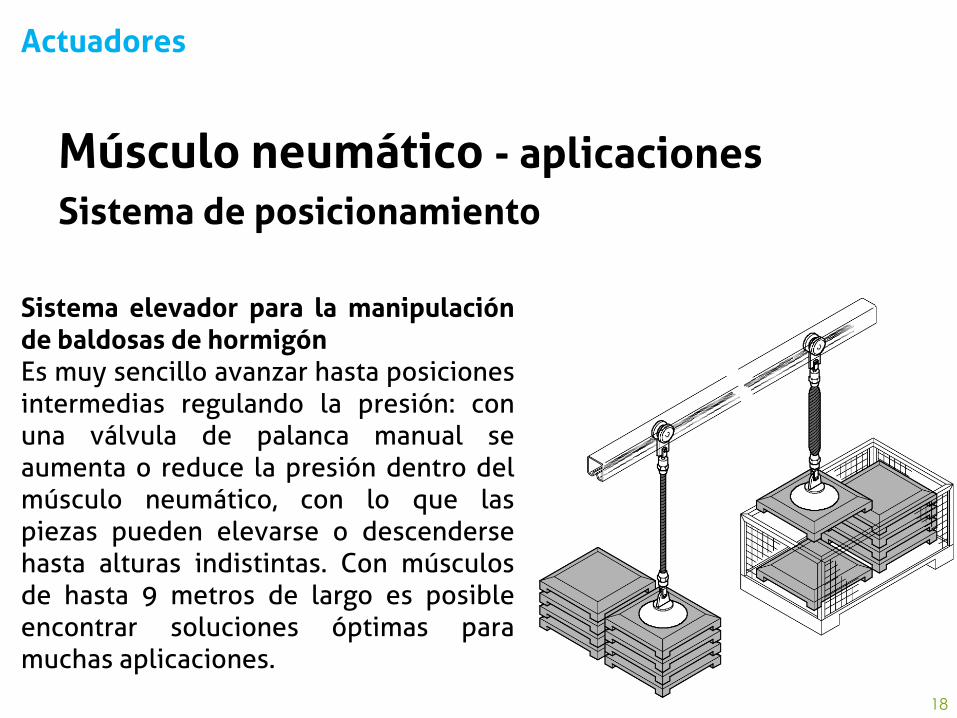
Sistema elevador para la manipulación de baldosas de hormigón Es muy sencillo avanzar hasta posiciones intermedias regulando la presión: con una válvula de palanca manual se aumenta o reduce la presión dentro del músculo neumático, con lo que las piezas pueden elevarse o descenderse hasta alturas indistintas. Con músculos de hasta 9 metros de largo es posible encontrar soluciones óptimas para muchas aplicaciones.
Actuadores
Músculo neumático - aplicaciones
Sistema de posicionamiento
19
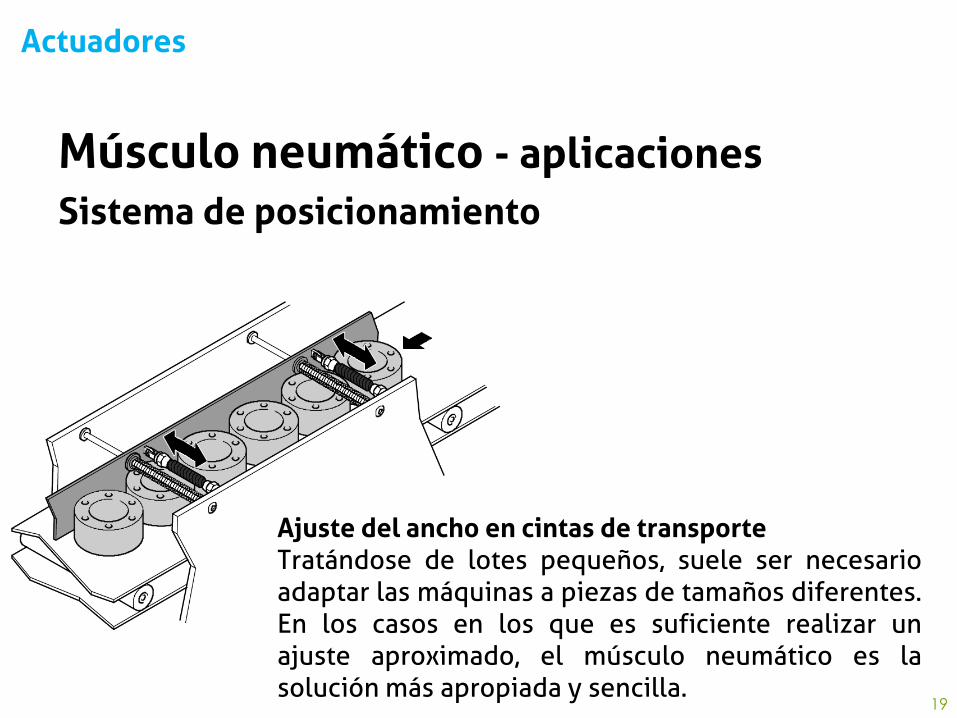
Ajuste del ancho en cintas de transporte Tratándose de lotes pequeños, suele ser necesario adaptar las máquinas a piezas de tamaños diferentes. En los casos en los que es suficiente realizar un ajuste aproximado, el músculo neumático es la solución más apropiada y sencilla.
Actuadores
Músculo neumático - aplicaciones
Entornos industriales difíciles
20
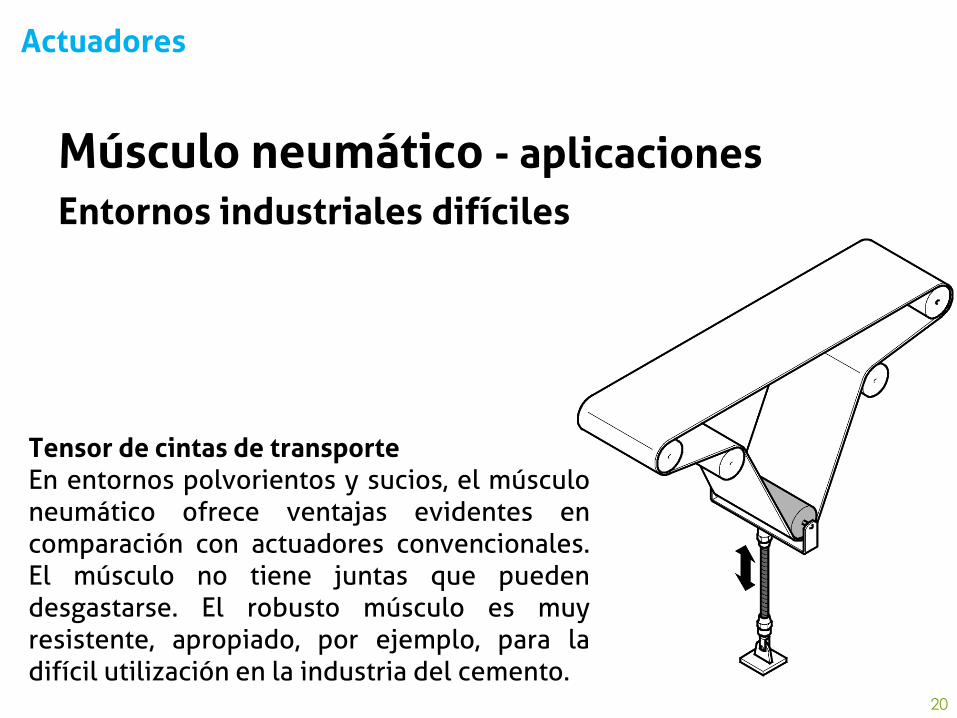
Tensor de cintas de transporte En entornos polvorientos y sucios, el músculo neumático ofrece ventajas evidentes en comparación con actuadores convencionales. El músculo no tiene juntas que pueden desgastarse. El robusto músculo es muy resistente, apropiado, por ejemplo, para la difícil utilización en la industria del cemento.
Actuadores
Músculo neumático - aplicaciones
Entornos industriales difíciles
21
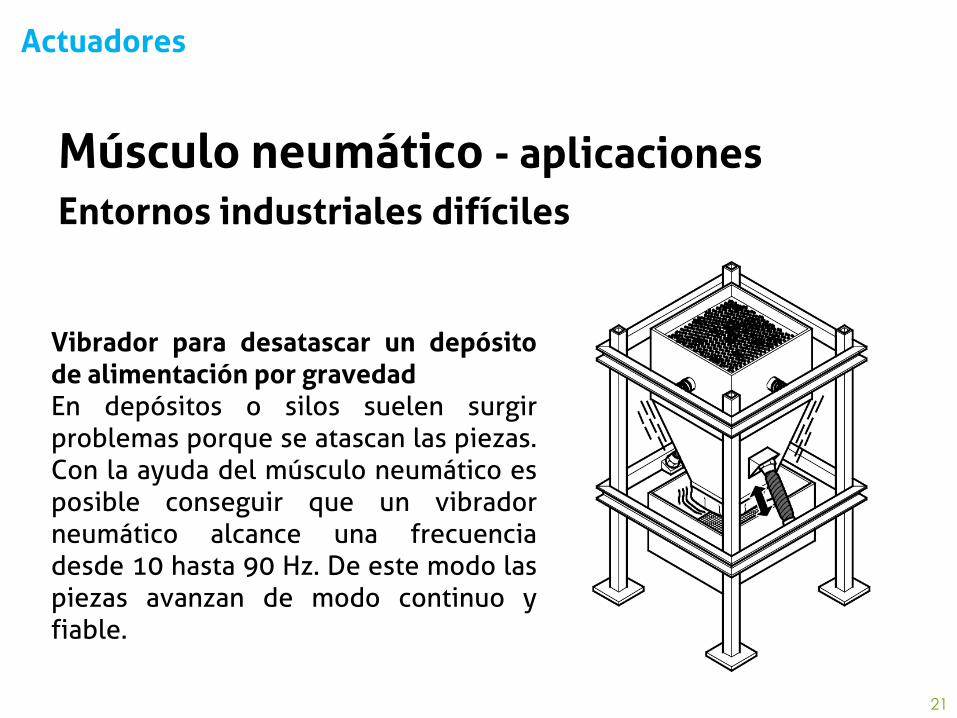
Vibrador para desatascar un depósito de alimentación por gravedad En depósitos o silos suelen surgir problemas porque se atascan las piezas. Con la ayuda del músculo neumático es posible conseguir que un vibrador neumático alcance una frecuencia desde 10 hasta 90 Hz. De este modo las piezas avanzan de modo continuo y fiable.
Actuadores

Músculo neumático - aplicaciones
22
Actuadores

Proyecto de laboratorio 5
33

34
Proyecto de laboratorio 5
Realizar un juego mecánico utilizando por lo menos 4 músculos neumáticos controlado mediante Visual Basic.
Objetivo: Objetivo:
Características del sistema: • El juego mecánico deberá ser innovador y creativo. • Se interactuará y controlará mediante Visual Basic. • Se deberá utilizar las teclas de la computadora para realizar algún tipo
de movimiento. • La interfaz de usuario deberá tener un diseño profesional, sencillo y
funcional, con resolución de 1024 x 800 px. (Si se tiene problemas con la resolución, aproximarse lo más posible).
Proyecto de laboratorio 5
35
Entrega del proyecto: • Tiempo de 1 hora y 30 minutos para entregar el proyecto. • Jueves 06/10 se realizará la cuarta entrega. • Documentación en formato de artículo IEEE a doble columna, entregar la
siguiente clase después de presentar el proyecto. • Documentación sin haber aprobado la entrega, no se acepta.
36
(ʘ‿ʘ)