el hombre y la máquina universidad autónoma de … · 58 el hombre y la máquina no. 25 • julio...
TRANSCRIPT

El hombre y la máquinaUniversidad Autónoma de [email protected] ISSN (Versión impresa): 0121-0777COLOMBIA
2005 Eduardo Marlés Sáenz / Enrique Ciro Quispe Oqueña
EL MÉTODO DEL VECTOR ESPACIAL. UNA INTRODUCCIÓN A LOS FUNDAMENTOS FÍSICO-MATEMÁTICOS Y A SU APLICACIÓN AL ESTUDIO DE
MÁQUINAS ELÉCTRICAS El hombre y la máquina, julio-diciembre, número 025
Universidad Autónoma de Occidente Cali, Colombia
pp. 56-69
Red de Revistas Científicas de América Latina y el Caribe, España y Portugal
Universidad Autónoma del Estado de México
http://redalyc.uaemex.mx
56 El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
Resumen
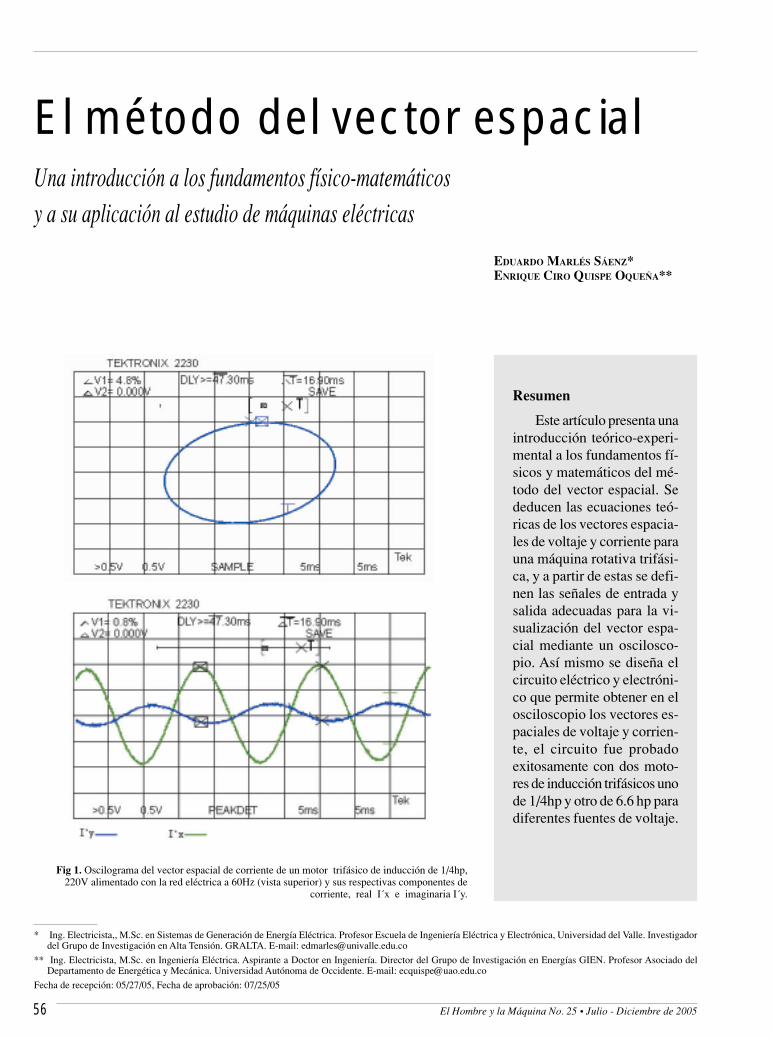
Este artículo presenta unaintroducción teórico-experi-mental a los fundamentos fí-sicos y matemáticos del mé-todo del vector espacial. Sededucen las ecuaciones teó-ricas de los vectores espacia-les de voltaje y corriente parauna máquina rotativa trifási-ca, y a partir de estas se defi-nen las señales de entrada ysalida adecuadas para la vi-sualización del vector espa-cial mediante un oscilosco-pio. Así mismo se diseña elcircuito eléctrico y electróni-co que permite obtener en elosciloscopio los vectores es-paciales de voltaje y corrien-te, el circuito fue probadoexitosamente con dos moto-res de inducción trifásicos unode 1/4hp y otro de 6.6 hp paradiferentes fuentes de voltaje.
El método del vector espacialUna introducción a los fundamentos físico-matemáticosy a su aplicación al estudio de máquinas eléctricas
EDUARDO MARLÉS SÁENZ*ENRIQUE CIRO QUISPE OQUEÑA**
* Ing. Electricista,, M.Sc. en Sistemas de Generación de Energía Eléctrica. Profesor Escuela de Ingeniería Eléctrica y Electrónica, Universidad del Valle. Investigadordel Grupo de Investigación en Alta Tensión. GRALTA. E-mail: [email protected]
** Ing. Electricista, M.Sc. en Ingeniería Eléctrica. Aspirante a Doctor en Ingeniería. Director del Grupo de Investigación en Energías GIEN. Profesor Asociado delDepartamento de Energética y Mecánica. Universidad Autónoma de Occidente. E-mail: [email protected]
Fecha de recepción: 05/27/05, Fecha de aprobación: 07/25/05
Fig 1. Oscilograma del vector espacial de corriente de un motor trifásico de inducción de 1/4hp,220V alimentado con la red eléctrica a 60Hz (vista superior) y sus respectivas componentes de
corriente, real I´x e imaginaria I´y.

57El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
Palabras clave: Vectorespacial, voltaje y corriente,fuerza magnetizante, campomagnético giratorio, circuitoeléctrico y electrónico.
Abstract
This article present atheoretical - experimental in-troduction to the physical andmathematical foundations ofthe space-vector method. Thetheoretical equations of thespace-vector of voltage andcurrent for a three-phase ro-tating machine are deduced,and then define the adequateinput and output signals forthe visualization of the spa-ce-vector using an oscillos-cope. Likewise, the electricand electronic circuit thatallows the visualization ofthe voltage and current spa-ce-vector in the oscilloscopewas designed; this circuit wastested successfully with twothree-phase induction mo-tors, one of 1/4hp and theother one of 6.6 hp with di-fferent voltage sources.
Key words: Space-vec-tor, voltage and current, mag-netizing force, rotating mag-netic field, electric and elec-tronic circuit.
mica de los motores eléctricos. Laaplicación de este método al con-trol de motores de inducción, Blas-chke,2 dio origen al método de con-trol de campo orientado o métodode control vectorial, que actualmen-te es el método estándar para el con-trol de motores de inducción.
En este trabajo se presentan losfundamentos físico-matemáticosdel método, deduciéndose en for-ma completa las ecuaciones mate-máticas correspondientes a los vec-tores espaciales de tensión, corrien-te y de fuerza magnetomotriz parael bobinado trifásico de una máqui-na de corriente alterna. Así mismose presenta la implementación deldiseño de un circuito eléctrico-electrónico que permite observaren un osciloscopio la evolución delvector espacial de tensión y co-rriente en el tiempo y su lugargeométrico. Los circuitos diseña-dos, Figuras 9 y 10, permiten ob-tener las componentes real e ima-ginaria de los vectores espacialesde corriente (fuerza magnetizante)y voltaje (flujo) de una máquina tri-fásica rotativa. Los circuitos imple-mentados fueron utilizados para elanálisis experimental de dos mo-tores de inducción trifásicos de1/4 hp y 6.6 hp, obteniéndose enun osciloscopio los vectores espa-ciales de voltaje y corriente. Losresultados presentados correspon-den a un trabajo de investigaciónque se inició como una tesis de gra-do3 y luego se continuó como unproyecto conjunto de cooperaciónentre dos grupos de investigación.
II. Fundamentosfísico-matemáticos
En la teoría de circuitos eléctri-cos de corriente alterna se usan losfasores, para representar ondas devoltaje y corriente que varían sinu-soidalmente en el tiempo debido aque simplifican extraordinariamen-te el análisis y el cálculo en circui-tos eléctricos.
I. Introducción
La comprensión del comporta-miento dinámico del motor eléctri-co es indispensable para el diseñode sistemas de control que satisfa-gan las exigencias requeridas por elmecanismo de producción. El mé-todo del vector espacial, propuestopor Rácz y Kovacs en 1954,1 es sinduda el método más completo paraexpresar matemáticamente la diná-
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña

58 El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
En el estudio de las máquinaseléctricas se presentan varias canti-dades físicas que pueden ser consi-deradas como funciones periódicas,distribuidas en el espacio alrededorde la periferia del estator y en elentrehierro de la máquina. Ejemplosde ello son la densidad de flujo mag-nético, la fuerza magnetomotriz delrotor y del estator. Estas funcionespueden ser tratadas como funcionesque varían sinusoidalmente en elespacio. Por lo tanto el fasor de lateoría de circuitos no puede ser usa-do para representar estas cantidades.Sin embargo, haciendo una analo-gía con el fasor se define el fasorespacial1 para representar cantida-des físicas de distribución sinusoi-dal en el espacio y su notación esnuméricamente igual a una cantidadcompleja. Si la magnitud en cues-tión tiene una distribución espacialno sinusoidal, se procede a su desa-rrollo en serie de Fourier y se leasigna a cada onda armónica su co-rrespondiente fasor espacial.
El fasor espacial también es lla-mado vector espacial, «vector Park-Gorev», «vector resultante» y «vec-tor trifásico».
La posición espacial de todoslos máximos, de una cantidad físi-ca determinada, está dada por unsolo vector espacial. La variaciónespacial de dicha cantidad física,para una coordenada espacial x, esla proyección del vector espacialsobre el respectivo vector unitariocomplejo.
El análisis con el método delvector espacial puede ser usado conmáquinas de polo liso o máquinasde polo saliente.
A. Notación matemáticadel vector espacial
El vector espacial representauna onda móvil, en el devanado dela máquina trifásica, de la forma
A = Amax . sen(t’-a) (1)
donde
t’ = ω.t = (2π / T).t
T = período de tiempo de laonda.
a = (2 π / Tesp).x
Tesp = período espacial de laonda y corresponde ados pasos polares 2τ.
Para una onda móvil obtenidade la superposición de tres ondaspulsantes (m = 3), desfasadas en elespacio y en el tiempo un ángulode la ecuación será de la forma:3,4
Figura 2. Sistema natural de coordenadas espaciales para la ubicación de los vectores espaciales.
(2)
A = fasor espacial resultan-te de m ondas pulsan-tes.
m = número de fases (m =3, máquinas trifásicas).
Vmax = valor máximo de cadaonda pulsante.
ˆ
De acuerdo con la Figura 2, parauna máquina con sus devanados defase igualmente diseñados y simé-tricamente distribuidos a 2π/3 gra-dos espaciales y circulando por ellos
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
^

59El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
*. Junto con las fuerzas magnetizantes de las otras fases Fb y Fc constituyen un sistema trifásico simétrico, y sus magnitudes son inversamente proporcionales alarmónico que representan.
las ondas pulsantes de cada fase deun sistema trifásico balanceado (V1,V2, V3) se obtiene la onda móvil dela ecuación 2.
Para un sistema trifásico balan-ceado de secuencia directa (ABC)las ondas pulsantes por fase son
De voltajes
Ua = Umax .cos(wt) (3)
Ub = Umax .cos(wt - 2π/3) (4)
Uc = Umax .cos(wt + 2π/3) (5)
De corrientes
Ia = Imax .cos(wt + θz) (6)
Ib = Imax .cos(wt + θz - 2π/3) (7)
Ic = Imax .cos(wt + θz + 2π/3) (8)
θz = ángulo relativo entre el vol-taje y corriente de cada fase.
Se usa el vector unitario â paraexpresar el desplazamiento en el pla-no complejo (equivalente al despla-zamiento espacial de los ejes de losgrupos de bobina de la Figura 2) deacuerdo con la ecuación:
â = ejθ = cos θ + j sen θ (9)
Para el caso particular de un sis-tema trifásico se usa θ = 2π /3 y seexpresa
(10)
(11)
Por estar desfasados en el espa-cio y el tiempo un mismo ángulo yde acuerdo con la ecuación (2), elvector espacial de la onda de volta-je correspondiente es
(15)
y su correspondiente onda deflujo magnético
(16)
Por definición de un sistema tri-fásico completo, se usa una terceracomponente de secuencia cero
(17)
(18)
Análogamente el vector espa-cial de la onda de corriente del es-tator se representa como
(19)
(20)
y su correspondiente onda defuerza magnetizante es
(21)
Donde
(22)
Fa* = fuerza magnetizante
(onda pulsante) total dela fase A para el armóni-co fundamental.
q= número de ranuras porpolo y fase.
Kdev= factor de devanado.
N= número de espiras porbobina.
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
(12)
(14)
(13)
Por lo tanto la ubicación de losejes de cada fase pulsante de un sis-tema trifásico de voltajes, secuen-cia ABC, es
60 El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
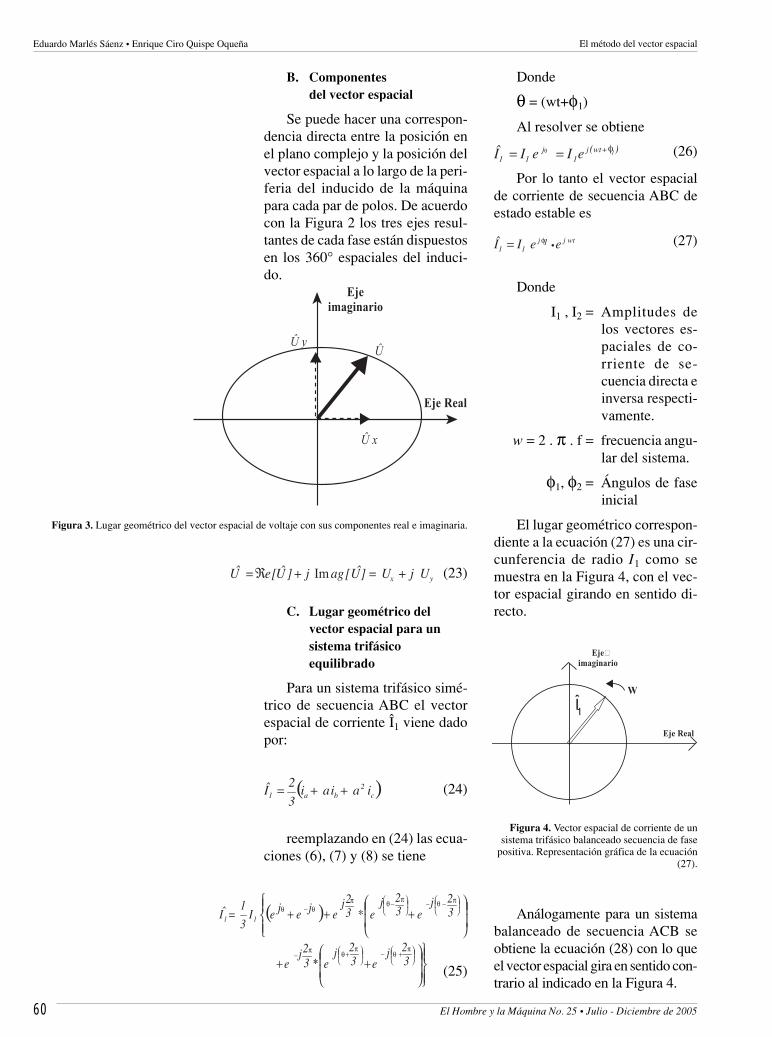
B. Componentesdel vector espacial
Se puede hacer una correspon-dencia directa entre la posición enel plano complejo y la posición delvector espacial a lo largo de la peri-feria del inducido de la máquinapara cada par de polos. De acuerdocon la Figura 2 los tres ejes resul-tantes de cada fase están dispuestosen los 360° espaciales del induci-do.
Donde
θ = (wt+φ1)
Al resolver se obtiene
Figura 3. Lugar geométrico del vector espacial de voltaje con sus componentes real e imaginaria.
(23)
C. Lugar geométrico delvector espacial para unsistema trifásicoequilibrado
Para un sistema trifásico simé-trico de secuencia ABC el vectorespacial de corriente Î1 viene dadopor:
(24)
reemplazando en (24) las ecua-ciones (6), (7) y (8) se tiene
(25)
(26)
Por lo tanto el vector espacialde corriente de secuencia ABC deestado estable es
(27)
Donde
I1 , I2 = Amplitudes delos vectores es-paciales de co-rriente de se-cuencia directa einversa respecti-vamente.
w = 2 . π . f = frecuencia angu-lar del sistema.
φ1, φ2 = Ángulos de faseinicial
El lugar geométrico correspon-diente a la ecuación (27) es una cir-cunferencia de radio I1 como semuestra en la Figura 4, con el vec-tor espacial girando en sentido di-recto.
Eje�
imaginario
W
Eje Real
Figura 4. Vector espacial de corriente de unsistema trifásico balanceado secuencia de fase
positiva. Representación gráfica de la ecuación(27).
Análogamente para un sistemabalanceado de secuencia ACB seobtiene la ecuación (28) con lo queel vector espacial gira en sentido con-trario al indicado en la Figura 4.
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
61El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
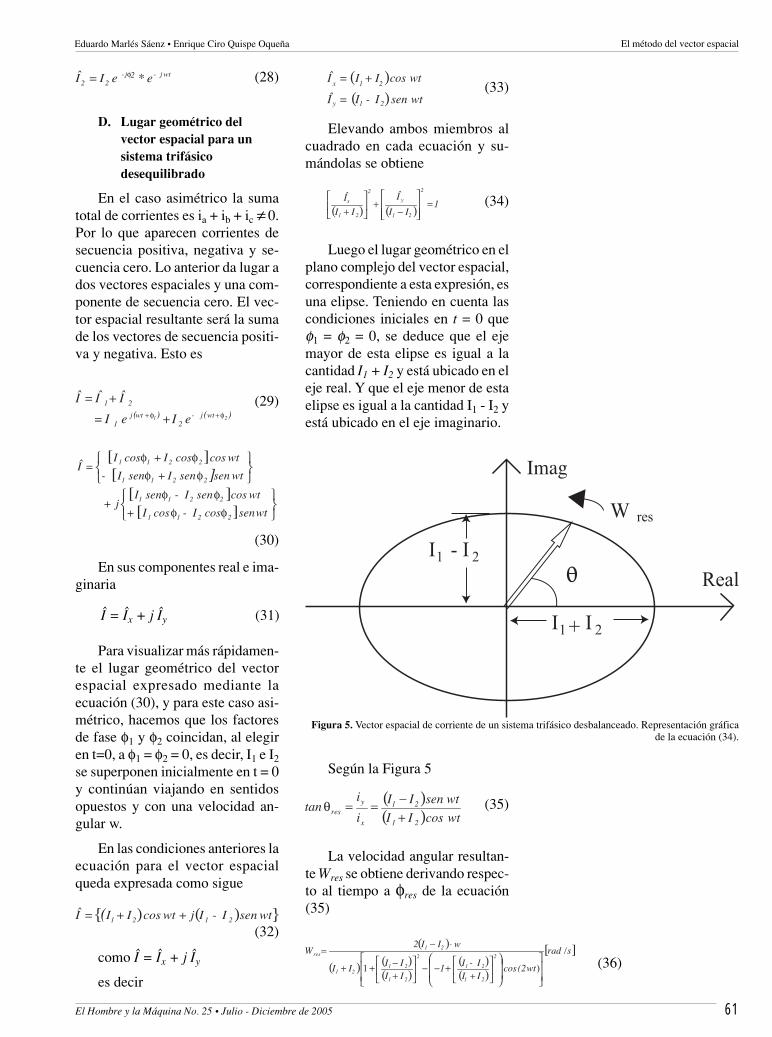
(33)(28)
D. Lugar geométrico delvector espacial para unsistema trifásicodesequilibrado
En el caso asimétrico la sumatotal de corrientes es ia + ib + ic ≠ 0.Por lo que aparecen corrientes desecuencia positiva, negativa y se-cuencia cero. Lo anterior da lugar ados vectores espaciales y una com-ponente de secuencia cero. El vec-tor espacial resultante será la sumade los vectores de secuencia positi-va y negativa. Esto es
(29)
(30)
En sus componentes real e ima-ginaria
Î = Îx + j Îy (31)
Para visualizar más rápidamen-te el lugar geométrico del vectorespacial expresado mediante laecuación (30), y para este caso asi-métrico, hacemos que los factoresde fase φ1 y φ2 coincidan, al elegiren t=0, a φ1 = φ2 = 0, es decir, I1 e I2
se superponen inicialmente en t = 0y continúan viajando en sentidosopuestos y con una velocidad an-gular w.
En las condiciones anteriores laecuación para el vector espacialqueda expresada como sigue
(32)
como Î = Îx + j Îy
es decir
Elevando ambos miembros alcuadrado en cada ecuación y su-mándolas se obtiene
(34)
Luego el lugar geométrico en elplano complejo del vector espacial,correspondiente a esta expresión, esuna elipse. Teniendo en cuenta lascondiciones iniciales en t = 0 queφ1 = φ2 = 0, se deduce que el ejemayor de esta elipse es igual a lacantidad I1 + I2 y está ubicado en eleje real. Y que el eje menor de estaelipse es igual a la cantidad I1 - I2 yestá ubicado en el eje imaginario.
Figura 5. Vector espacial de corriente de un sistema trifásico desbalanceado. Representación gráficade la ecuación (34).
Según la Figura 5
(35)
La velocidad angular resultan-te Wres se obtiene derivando respec-to al tiempo a φres de la ecuación(35)
(36)
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña

62 El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
En la ecuación (36) se ve clara-mente que la velocidad angular re-sultante es variable respecto al tiem-po y a la frecuencia y su sentido degiro es el siguiente:
• Sentido directo (sentido de se-cuencia positiva) si.I1 > I2 .
• Sentido inverso si I1 < I2 .
• Es nulo en el caso de un deva-nado monofásico donde I1 = I2.
Mediante un análisis matemá-tico más detallado3 de la ecuación(30) se encontraron las siguientesrelaciones importantes
1) En el arranque, el motor eléc-trico de inducción alcanza lospicos máximos de corriente en:
Para frecuencia constante losmomentos en donde se alcanzanlos máximos dependen directa-mente de la fase en la que sehallaba, para t = 0, cada uno delos sistemas simétricos de se-cuencia positiva y negativa.
Una aplicación de lo encontra-do, es que se podrían controlardirectamente los puntos en loscuales ocurrirán los máximosdel vector espacial de corrien-te3 con sólo variar los factoresde fase φ1 y φ2 de tal maneraque de entrada se logre saber,por ejemplo, que el primermáximo de la onda del vectorespacial de corriente ocurrirápara k = 0 en wt = -(φ1 + φ2)/2radianes eléctricos.
2) Los períodos y la frecuencia enlos cuales ocurren los picosmáximos de corriente, son in-versamente proporcionales. Esdecir que para tiempos muy pe-queños de un estado transitorioen la ecuación (37) se observaque como los factores de fase
son constantes, las frecuenciasdeben ser altas para equilibrarfísicamente el fenómeno iner-cial eléctrico de acuerdo con laecuación
(38)
Lo anterior ocurre hasta que lamáquina rotativa logre el estado es-table.
E. Lugar geométrico delvector espacial en el caso endonde se abre la línea dealimentación por dondecircula i
b
Si la corriente de fase ib se hacecero se tiene que ia + ic = 0 de don-de, ic= – ia
Es decir que en estos casos lascorrientes de las líneas restantes seequilibran de tal manera que susuma es igual a cero.
i
i
i
a
c
b=0
Figura 6. Eliminación de la corriente de líneade la fase b que alimenta a un motor trifásico.
Para hallar el lugar geométricocorrespondiente a este caso partien-do de la ecuación (19), se hace enesta ecuación ib = 0, y se sustituyeic = - ia con lo que se obtiene
(39)
Eje Imaginario
Eje Real
ib=0
ic
1a
ia
3
Figura 7. Lugar geométrico del vector espacial decorriente con sus componentes real e imaginaria.
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
, con k= 0,2,4,6... par
(37)

63El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
F. Cantidades de los valoresinstantáneos de los voltajesde fase
Los voltajes de fase se hallancomo la proyección del vector es-pacial sobre los ejes del sistema dereferencia trifásico mediante lasexpresiones siguientes
En función de las tensiones defase
(42)
(41)
(40)
Para un sistema simétrico en losdevanados de la máquina rotativa,la componente de secuencia cero noestá presente y las proyecciones soncomo se muestra en la Figura 8.
G. Obtención de lascomponentes del vectorespacial
El vector espacial puede serobtenido a partir de las ecuaciones(40) a la (42) en componentes defase o de línea de acuerdo con elcapítulo 4.3 Las relaciones son lassiguientes:
(44)
(43)
En función de los voltajes delínea
(45)
(46)
Análogamente para las compo-nentes de corriente:
En función de las corrientes defase
(47)
(48)
En función de las corrientes delínea
(49)
(50)
H. Relaciones entre lascantidades de línea y defase usando lascomponentes del vectorespacial
Para secuencia ABC las compo-nentes espacio-temporales del vec-tor espacial (cantidades de voltajesde línea en notación compleja) son
(51)
(52)
(53)
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
Figura 8. Proyecciones del vector espacialsobre los ejes de cada fase.

64 El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
Los valores de las tensiones delínea serán
Sustituyendo este resultado enla ecuación (63) se llega a que lapotencia instantánea es
(55)
(54)
(56)
Las componentes espacio tem-porales del vector espacial (canti-dades de corrientes de línea en no-tación compleja) son
(57)
(58)
(59)
Los valores de las corrientes delínea serán
(60)
(61)
(62)
I. Potencia instantánea
Conocidos los vectores espacia-les de voltaje y corriente de un sis-tema, se puede conocer la potenciainstantánea presente, lo cual se cum-ple en el caso de sistemas simétri-cos o asimétricos. Se puede calcu-lar la potencia instantánea, mediantela expresión:
(63)
(64)
Donde
Û,Î = los vectores espaciales devoltaje y corriente respectivamente
Û* , Î* = los complejos con-jugados de los vectores espacia-les de voltaje y corriente respec-tivamente.
Resolviendo la ecuación (64) setiene
(65)
(66)
III. Análisis experimental
A. Presentación y grabado delos vectores espaciales devoltaje y corriente.
El lugar geométrico del vectorespacial de voltaje puede ser visua-lizado, mediante la gráfica o graba-do en la pantalla de un oscilosco-pio. Para ello se debe disponer desus componentes real e imaginariade acuerdo con la ecuación (23) ylas ecuaciones (45) y (46). El pro-pósito se logra midiendo las canti-dades de línea UA y UB.
En la Figura 9 se muestra el cir-cuito de medición diseñado e imple-mentado para obtener las componen-tes del vector espacial de voltaje enforma de señales analógicas en las pro-porciones indicadas en la figura, cu-yas amplitudes pueden ser ajustadas alos niveles necesarios. Lo anterior esimportante en la implementación decircuitos o sistemas de control directodel campo de la máquina.5
Igualmente, como el vector es-pacial de corriente puede ser expre-sado en sus componentes real e ima-ginaria de acuerdo con la ecuación(31), basta con determinar las com-ponentes corriente îx , îy de acuerdocon las ecuaciones (49) y (50) quese obtienen midiendo las cantidadesde línea iA y iB.
En la Figura 10 se muestra elcircuito de medición diseñado eimplementado y con el cual se ob-tuvo tanto las ondas de las compo-nentes îx e îy así como el vector es-pacial de corriente del estator de unmotor de inducción de 1/4 hp concarga y cuyos resultados se mues-tran en la Figura 10.
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
Con

65El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
Figura 10. Esquema de la implementación del circuito de medición de las componentes del vectorespacial de corriente.
Figura 9. Esquema de la implementación del circuito de medición de las componentes del vectorespacial de voltaje.
La implementación del circuitose realizó en cuatro etapas necesa-rias, a saber:
• 1= Etapa de potencia, donde esnecesario el uso de transforma-dores de instrumentación.
• 2 = Etapa de aislamiento, paraatenuar los efectos de los transi-torios en el arranque que podríandañar los circuitos integrados.
• 3 = Etapa de ajuste de amplitudde las señales de entrada, conlo que se establecen los facto-res numéricos de atenuación decada etapa.
• 4 = Etapa de cálculo de las com-ponentes del vector espacial.Esta etapa entrega finalmentelas cantidades o componentesreal e imaginaria para ser lleva-das a las placas vertical y hori-zontal del osciloscopio a travésde los canales de entrada quepueden ser A y B.
Para observar el lugar geomé-trico del vector espacial se debe se-leccionar la función de trazado x-yo comparación de canales del osci-loscopio.
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña

66 El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
B. Ejemplos de oscilogramasde los vectores espaciales devoltaje y corriente.
Con los circuitos diseñados eimplementados se obtuvieron lososcilogramas usando los canales Ay B de un osciloscopio Tektronix2230.
1. Oscilogramas del vectorespacial de corriente
La Figura 11 muestra el oscilo-grama del vector espacial de co-rriente para un motor trifásico deinducción de 1/4hp, 220V operan-do en vacío. El desbalance en lascorrientes del estator no es muy
apreciable debido a los valores ba-jos de corriente. Contrariamente enla Figura 10 y para la misma má-quina, operando con carga nominal,el vector espacial de corriente indi-ca un ligero desbalance en las co-rrientes trifásicas cuando es alimen-tado con una fuente trifásica de vol-tajes balanceados en las condicio-nes indicadas. La situación presen-tada en la Figura 10 es un caso si-milar al estimado teóricamente ypresentado en la Figura 5, donde lavelocidad angular del rotor no esconstante.
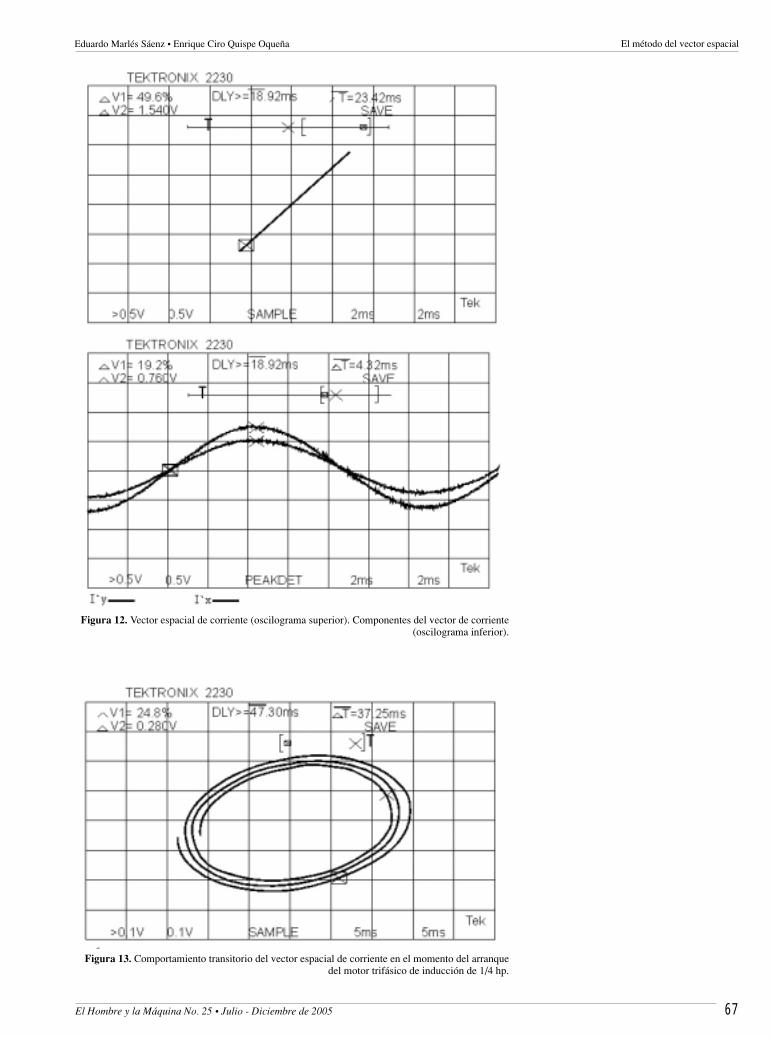
En la Figura 12 se presentan lasondas componentes del vector es-pacial en el caso de la máquina fun-cionando en estado estable y a lacual se le ha quitado la alimentaciónpor la línea de la fase B. Es impor-tante destacar cómo las componen-tes real e imaginaria quedan en fase.El lugar geométrico correspondien-te es el mostrado en la Figura 12,vista superior. En este caso la ondadeja de ser móvil en el entrehierrode la máquina para volverse pulsan-te y su amplitud varía a lo largo dela recta o lugar geométrico que semuestra. La situación presentada enla Figura 13 es el caso similar al es-timado teóricamente y presentadoen la Figura 7, donde la velocidadangular del rotor es cero.
La Figura 13 muestra el transi-torio del vector espacial de corrien-te del motor, para llegar finalmenteal estado estable de la Figura 1. Seaprecia cómo la magnitud del vec-tor espacial de corriente decae en eltiempo y en el espacio haciendo unatrayectoria en espiral hacia el cen-tro hasta alcanzar la magnitud delvector espacial de corriente en es-tado estable ( lugar geométrico másinterno de la Figura 13).
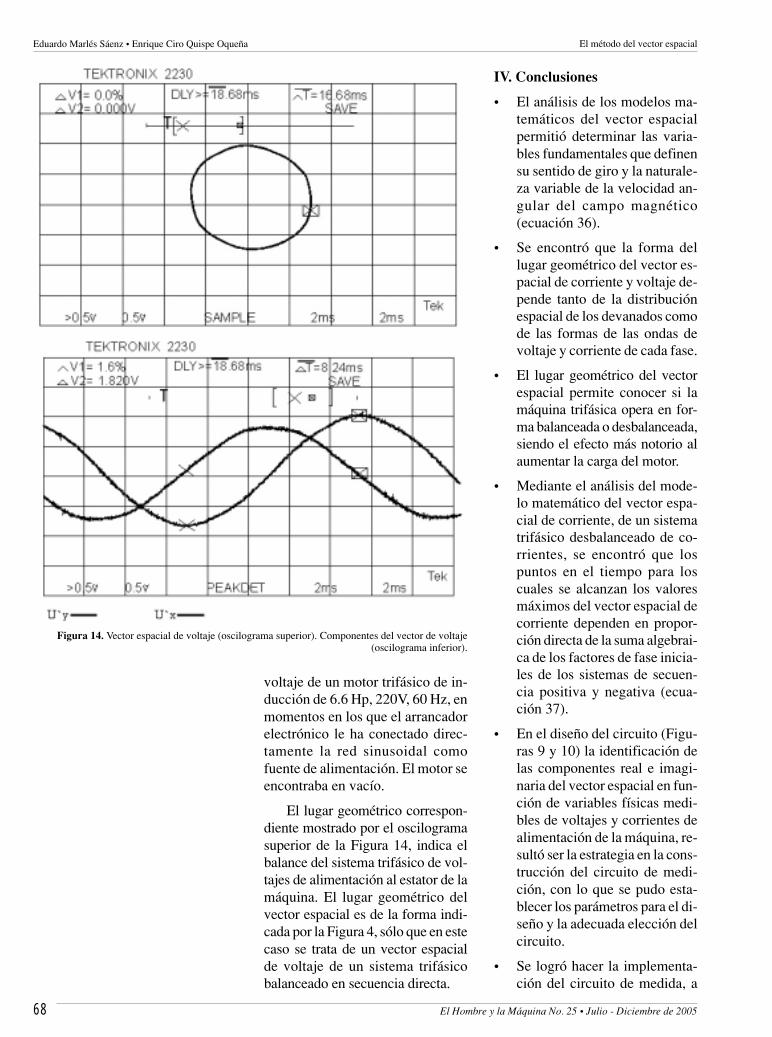
2. Oscilogramas del vectorespacial de voltaje
La Figura 14 presenta los osci-logramas de las componentes real eimaginaria del vector espacial de
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
Figura 11. Vector espacial de corriente (oscilograma superior). Componentes del vector de corriente(oscilograma inferior).
67El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
Figura 12. Vector espacial de corriente (oscilograma superior). Componentes del vector de corriente(oscilograma inferior).
Figura 13. Comportamiento transitorio del vector espacial de corriente en el momento del arranquedel motor trifásico de inducción de 1/4 hp.
68 El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
voltaje de un motor trifásico de in-ducción de 6.6 Hp, 220V, 60 Hz, enmomentos en los que el arrancadorelectrónico le ha conectado direc-tamente la red sinusoidal comofuente de alimentación. El motor seencontraba en vacío.
El lugar geométrico correspon-diente mostrado por el oscilogramasuperior de la Figura 14, indica elbalance del sistema trifásico de vol-tajes de alimentación al estator de lamáquina. El lugar geométrico delvector espacial es de la forma indi-cada por la Figura 4, sólo que en estecaso se trata de un vector espacialde voltaje de un sistema trifásicobalanceado en secuencia directa.
IV. Conclusiones
• El análisis de los modelos ma-temáticos del vector espacialpermitió determinar las varia-bles fundamentales que definensu sentido de giro y la naturale-za variable de la velocidad an-gular del campo magnético(ecuación 36).
• Se encontró que la forma dellugar geométrico del vector es-pacial de corriente y voltaje de-pende tanto de la distribuciónespacial de los devanados comode las formas de las ondas devoltaje y corriente de cada fase.
• El lugar geométrico del vectorespacial permite conocer si lamáquina trifásica opera en for-ma balanceada o desbalanceada,siendo el efecto más notorio alaumentar la carga del motor.
• Mediante el análisis del mode-lo matemático del vector espa-cial de corriente, de un sistematrifásico desbalanceado de co-rrientes, se encontró que lospuntos en el tiempo para loscuales se alcanzan los valoresmáximos del vector espacial decorriente dependen en propor-ción directa de la suma algebrai-ca de los factores de fase inicia-les de los sistemas de secuen-cia positiva y negativa (ecua-ción 37).
• En el diseño del circuito (Figu-ras 9 y 10) la identificación delas componentes real e imagi-naria del vector espacial en fun-ción de variables físicas medi-bles de voltajes y corrientes dealimentación de la máquina, re-sultó ser la estrategia en la cons-trucción del circuito de medi-ción, con lo que se pudo esta-blecer los parámetros para el di-seño y la adecuada elección delcircuito.
• Se logró hacer la implementa-ción del circuito de medida, a
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña
Figura 14. Vector espacial de voltaje (oscilograma superior). Componentes del vector de voltaje(oscilograma inferior).

69El Hombre y la Máquina No. 25 • Julio - Diciembre de 2005
partir de recomendaciones an-teriores sobre prototipos de di-seño.9,13. Obteniéndose un nue-vo diseño que describe fielmen-te los comportamientos de lamáquina, como se espera segúnla teoría.
• Los circuitos implementadosfueron utilizados para el análi-sis experimental de dos moto-res de inducción trifásicos de1/4 hp y 6.6 hp, y así observarque el lugar geométrico de losvectores espaciales depende deltipo de tensión de alimentacióny del estado del motor, compro-bándose la validez de las ecua-ciones teóricas
cial. Tesis de Grado. Director E.Quispe. Universidad del Valle. 1997.
4. Kostenko, M.P. y Piotroski, I. M.Máquinas Eléctricas. Moscú, Mir.1976. Tomo II.
5. Uffe Borup, Prasad N. Enjeti, andFrede Blaabjerg. A New space-vec-tor -Based Control Method for UPSSystems Powering Nonlinear andUnbalanced Loads. IEEE Transactio-ns On Industry Applications, Vol. 37,No. 6. 2001. pp 1864-1870.
6. VAS, Peter. Electrical Machines andDrives. A space-vector TheoryApproach. Clarendon Press. Oxford.1992.
7. R. Muñoz, Alfredo and Lipo, Tho-mas A. Complex vector Model ofthe Squirrel-Cage InductionMachine Including Instantaneous.Rotor Bar Currents. IEEE Transac-tions On Industry Applications, Vol.35, No. 6. 1999. pp 1332-1340.
8. Lázar, J. Park - vector Theory of Line- Commutated Three-Phase BridgeConverters. Converter ControlledElectrical Drives Series editor: S.Halász. Volume I. Budapest. Hun-gría. 1987.
9. Naunin, Dietrich. Teaching Aspectsfor The Representation of ModernControl of Induction Motor Drives.
10. Naunin, Dietrich. The Calculation ofDynamic Behavior of ElectricalMachines By space-Fasors. Electri-cal Machine and Electromechanics.Vol. 4. 1974. pp. 33-45.
11. Patiño, Jorge E. Control de CampoOrientado. Memorias Primer En-cuentro Nacional de Automática,Cali. Noviembre de 1994.
12. Quispe, Enrique. Modelos Matemá-ticos para el Análisis Transitorio dela Máquina Asíncrona. CorporaciónUniversitaria Autónoma de Occiden-te. Santiago de Cali. 1994.
13. RÁCZ, I. Háromfázisú Vektork Osci-llografálása és Harmonikus Analízise(Presentación y Análisis de Armóni-cos de los vectores espaciales). Elek-trotechníca. 58. évf. 1965. pp. 80-97.
14. Serrano Iribarnegaray, L. Fundamen-tos de Máquinas Eléctricas Rotativas.Barcelona, Marcombo. 1989.
15. Serrano Iribarnegaray, L. and Morán,Eguíluz.: Régimen Dinámico y Controlde Motores Eléctricos. Introducción ala Teoría de Fasores espaciales. MundoElectrónico. May. 1991. pp. 111-115.
16. Quispe, Enrique. Navas, Jhon y Fer-nández, Leonardo. Modelamiento yAnálisis Transitorio del Motor de In-ducción usando el método del vecto-respacial. Memorias I Congreso de laasociacion Colombiana de Automá-tica. Noviembre 1994. Cali, Colom-bia. pp 291-298.
17. Aller, J.M.; Bueno, A.; Paga, T.; Res-trepo, J.A. Guzman, V.M.;Gimenez,M.I. space vector applica-tions in power systems. En: Devices,Circuits and Systems, 2000. Procee-dings of the 2000 Third IEEE Inter-national Caracas Conference on 15-17, 2000. pp 781 - 786.
V. Referencias
1. Rácz. I. and Kovács. K. P. Transien-te Vorgänge in Wechselstrommaschi-nen. Akademia Kiadó. Budapest.1954.
2. Blaschke, F. The principle of field-orientation as applied to the newTransvektor closed-loop control sys-tem for rotating-fiel machines. Sie-mens Review, No. 34, 1972, pp 217-220.
3. Marlés S., Eduardo. FundamentosFísico Matemáticos del vector espa-
El método del vector espacialEduardo Marlés Sáenz • Enrique Ciro Quispe Oqueña