el espacio afín - sietecolinas.es · concepto intuitivo de espacio tridimensional, esto es, el...
TRANSCRIPT
El Espacio Afín
I. E. S. Siete Colinas (Ceuta) Departamento de Matemáticas
Matemáticasde
2º de Bachillerato
Por Javier Carroquino CaZas Catedrático de matemáticas
del I.E.S. Siete Colinas
Ceuta 2005

El Espacio Afín
Javier Carroquino Cañas

Matemáticas de 2º de bachillerato–•–
Ciencias de la Naturaleza y la SaludTecnología
El Espacio Afín
PorJavier Carroquino CañasCatedrático de matemáticas
I.E.S. Siete Colinas (Ceuta)Departamento de Matemáticas
Ceuta 2005
© Javier Carroquino CañasI.E.S. Siete Colinas (Departamento de Matemáticas)El Espacio Afín
Depósito Legal : CE&49 / 2005
ISBN : 84&689&2024&7
Número de Registro : 05 / 30406
Ceuta 2005
Prólogo
El Espacio Afín es el espacio ordinario de laGeometría elemental, esto es, algo análogo al
Plano Afín que se debió ver con anterioridad y queidentificábamos con la idea de lo que entendemos por elplano intuitivo.
En este tema estructuramos matemáticamente elconcepto intuitivo de espacio tridimensional, esto es, elespacio que nos rodea, partiendo de un concepto básico,la idea de punto, para continuar con la definición de losconceptos de vector fijo y vector libre hasta conseguir unestudio y comprensión de otros elementos que intuimosen dicho espacio como son la recta y el plano, o partesde estos, como son los segmentos o “trozos” de planosque pueden intervenir en la formación de cuerposgeométricos.
Un apoyo indispensable para el estudio delEspacio Afín es el espacio vectorial ú3(ú), el cual nosservirá como estructura operativa para manejar ymanipular los elementos geométricos del espacio. Valgacomo aclaración de lo anterior que fue el matemáticofrancés René Descartes (1596-1650) quién identificóun punto cualquiera del espacio con una terna oelemento (a, b, c) del espacio vectorial ú3(ú) después dehaber fijado unos ejes de referencia. Con ello se consigueque ú3(ú) y el espacio caminen juntos para lacomprensión de este.

Matemáticas de 2º de bachillerato El Espacio AfínI
Índice
Página
1.Introducción ........................................... 12.Vectores fijos del espacio ............................. 13.Módulo dirección y sentido de un vector fijo del espacio. 2
Ejemplo 1 ........................................... 3Ejemplo 2 ........................................... 4Ejemplo 3 ........................................... 4
4.Equipolencia de vectores fijos del espacio .............. 55.Propiedades de la equipolencia de vectores fijos del espacio . 66.Relación de equivalencia entre los vectores fijos del espacio. 87.Clase de equivalencia de vectores fijos del espacio. .... 88.Propiedades de las clases de equivalencia de vectores fijos... 89.Vector libre del espacio ............................... 10
Ejemplo 4............................................ 1110.Módulo, dirección y sentido de un vector libre del espacio... 1111.Suma de vectores libres del espacio .................... 12
Ejemplo 5............................................ 13Ejemplo 6............................................ 13
12.Propiedades de la suma de vectores libres del espacio .. 1413.El grupo conmutativo de los vectores libres del espacio .1714.Resta de vectores libres del espacio ................... 1715.Producto de un número real por un vector libre del espacio .. 18
Ejemplo 7............................................ 18Ejemplo 8............................................ 19Ejemplo 9............................................ 19
16.Propiedades del producto de un número real por un vector libre.20Ejemplo 10 .......................................... 20Ejemplo 11 .......................................... 21Ejemplo 12 .......................................... 21
17.El espacio vectorial de los vectores libres del espacio. 2218.Otra propiedades de la operación externa de V3(ú)....... 2319.Combinación lineal de vectores libres del espacio....... 23
Ejemplo 13 .......................................... 24Ejemplo 14 .......................................... 25Ejemplo 15 .......................................... 26Ejemplo 16 .......................................... 27
20.Vectores libres del espacio linealmente dependientes ... 28Ejemplo 17 .......................................... 31Ejemplo 18 .......................................... 31Ejemplo 19 .......................................... 32
21.Vectores libres del espacio linealmente independientes.. 3222.Base del espacio vectorial V3(ú)........................ 3523.Propiedad de las bases del espacio vectorial V3(ú) ..... 36
Ejemplo 20 .......................................... 37Ejemplo 21 .......................................... 38
24.Componentes de un vector de V3(ú)respecto de una base .. 39Ejemplo 22 .......................................... 40Ejemplo 23 .......................................... 40
Matemáticas de 2º de bachillerato El Espacio AfínII
Página
25.Ángulo formado por dos vectores libres del espacio ..... 41Ejemplo 24 .......................................... 41Ejemplo 25 .......................................... 42
26.Base canónica en el espacio vectorial V3(ú)............. 42Ejemplo 26 .......................................... 43
27.Isomorfismo entre los espacios vectoriales ú3(ú)y V3(ú). 43Ejemplo 27 .......................................... 47
28.El Espacio Afín ........................................ 4829.Sistema de referencia en el Espacio Afín ............... 50
Ejemplo 28 .......................................... 5030.Coordenadas de un punto del esp. respec. de un sist. de refer. 51
Ejemplo 29 .......................................... 5331.Sistema de referencia ortogonal del Espacio Afín ....... 53
Ejemplo 30 .......................................... 5332.Sistema de referencia ortonormal del Espacio Afín .......54
Ejemplo 31 .......................................... 5533.Vector definido por dos puntos del espacio ............. 55
Ejemplo 32 .......................................... 5734.Coordenadas del punto medio de un segmento ............. 58
Ejemplo 33 .......................................... 5935.La recta en el Espacio Afín ............................ 60
Ejemplo 34 .......................................... 6136.Ecuación de la recta en el Espacio Afín ................ 61
Ejemplo 35 .......................................... 66Ejemplo 36 .......................................... 68Ejemplo 37 .......................................... 69Ejemplo 38 .......................................... 69Ejemplo 39 .......................................... 70Ejemplo 40 .......................................... 70Ejemplo 41 .......................................... 72
37.Recta determinada por dos puntos ...... ................ 73Ejemplo 42 .......................................... 75
38.El plano en el Espacio Afín. Ecuaciones del plano ...... 76Ejemplo 43 .......................................... 79Ejemplo 44 .......................................... 81Ejemplo 45 .......................................... 82
39.Plano determinado por tres puntos ...................... 83Ejemplo 46 .......................................... 87
40.Condición para que cuatro puntos sean coplanarios ...... 88Ejemplo 47 .......................................... 90Ejemplo 48 .......................................... 90
41.Plano determinado por una recta y un punto exterior a ella .. 91Ejemplo 49 .......................................... 92Ejemplo 50 .......................................... 93
42.Condición para que tres puntos del espacio estén alineados .. 95Ejemplo 51 .......................................... 95Ejemplo 52 .......................................... 96Ejemplo 53 .......................................... 96
43.Recta que pasa por un punto y es paralela a otra recta.. 96Ejemplo 54 .......................................... 97
Matemáticas de 2º de bachillerato Página 1 El Espacio Afín
1.Introducción.-
Antes de comenzar el estudio de este tema es conveniente que el alumno tenga lossiguientes conocimientos previos:T El conjunto ú2. El espacio vectorial ú2(ú).T El conjunto de los vectores libres del plano V2.T Operaciones en el conjunto V2.T El espacio vectorial V2(ú).T El Plano Afín. Correspondencia entre puntos del plano y vectores libres del plano.T Sistema de referencia en el Plano Afín.T Correspondencia entre los conjuntos siguientes:
P 6 Conjunto de los puntos del plano.V2 6 Vectores libres del plano.ú2 6 Conjunto de los pares ordenados de números reales.
T Coordenadas de un punto respecto a n sistema de referenciaT La recta en el Plano Afín. Ecuaciones de la recta.
2.Vectores fijos del espacio.-
Llamaremos E al espacio, es decir, al conjunto formado por los infinitos puntos queforman el espacio. A los elementos de E, esto es, a los puntos del espacio los designaremos conletras mayúsculas, es decir A, B, C, D, ......
Por tanto: P0E ] P es un punto del espacio. Es evidente que el conjunto E tiene infinitos elementos.Consideraremos que dados A,B0E, se verifica que A = B ] A y B son el mismo punto.
Vamos a definir un nuevo concepto: “Vector fijo del espacio”O Sean A y B dos puntos cualesquiera del espacio, es decir, A,B0E
O Se define el “segmento de extremos A y B”, que expresamos como o también ,AB BAal “trozo” de recta que une los puntos A y B. Nótese que no hacemos distinción entre losextremos.
O Ahora bien, si consideramos el segmento con una orientación “de A a B” o de “B a A”y distinguimos entre y , tenemos el concepto de “vector fijo del espacio”, esAB BAdecir:
AB A B
BA B A
→
→
es el vector fijo del espacio de extremos y
es el vector fijo del espacio de extremos yNotese que la “flecha” nos distinguirá entre la idea de segmento y de vector fijo.
figura 1
El Espacio Afín
Matemáticas de 2º de bachillerato Página 2 El Espacio Afín
ABAB
→
Vector fijo siendoOrigen del vectorExtremo del vector
,::
Por tanto:
O Por tanto, un vector fijo del espacio viene determinado por dos puntos y una orientaciónentre ellos. Dichos puntos se denominan origen y extremo del vector. Veamos:
Quede claro que Estos vectores se dice que son opuestos.AB BA → →
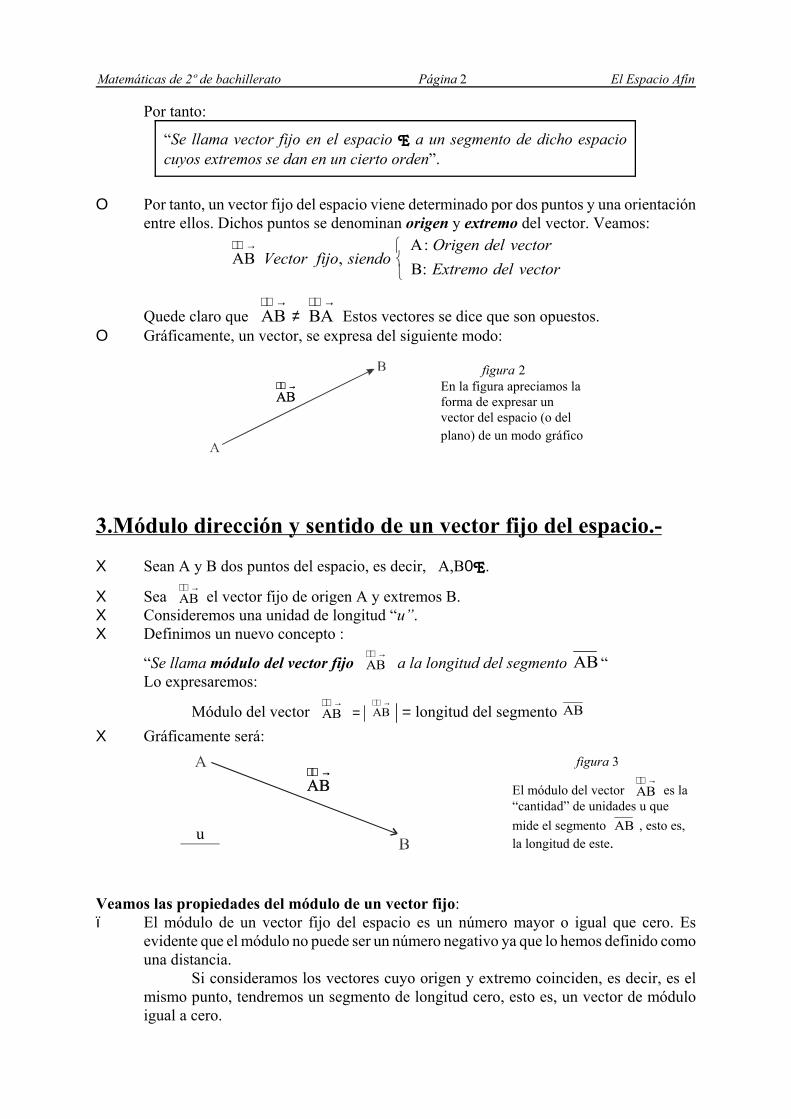
≠O Gráficamente, un vector, se expresa del siguiente modo:
3.Módulo dirección y sentido de un vector fijo del espacio.-
X Sean A y B dos puntos del espacio, es decir, A,B0E.
X Sea el vector fijo de origen A y extremos B.AB →
X Consideremos una unidad de longitud “u”.X Definimos un nuevo concepto :
“Se llama módulo del vector fijo a la longitud del segmento “AB → AB
Lo expresaremos:
Módulo del vector longitud del segmento AB →
= AB →
= AB
X Gráficamente será:
Veamos las propiedades del módulo de un vector fijo:Î El módulo de un vector fijo del espacio es un número mayor o igual que cero. Es
evidente que el módulo no puede ser un número negativo ya que lo hemos definido comouna distancia.
Si consideramos los vectores cuyo origen y extremo coinciden, es decir, es elmismo punto, tendremos un segmento de longitud cero, esto es, un vector de móduloigual a cero.
“Se llama vector fijo en el espacio E a un segmento de dicho espaciocuyos extremos se dan en un cierto orden”.
AB → →
figura 2En la figura apreciamos laforma de expresar unvector del espacio (o delplano) de un modo gráfico
AB → →
u
figura 3
El módulo del vector es laAB →
“cantidad” de unidades u quemide el segmento , esto es,ABla longitud de este.
Matemáticas de 2º de bachillerato Página 3 El Espacio Afín
A
B
C
AB = BA
CC = 0
Por tanto: y AB →
≥ 0 AA →
= 0
Apréciese que el vector coincide gráficamente con el punto A del espacio.AA →
Ï Dos vectores fijos opuestos tienen igual módulo. Es evidente, ya que y sonAB →
BA →
dos vectores opuestos y los segmentos y son el mismo y, por tanto tienen igualAB BAlongitud.
Por tanto: AB →
= BA →
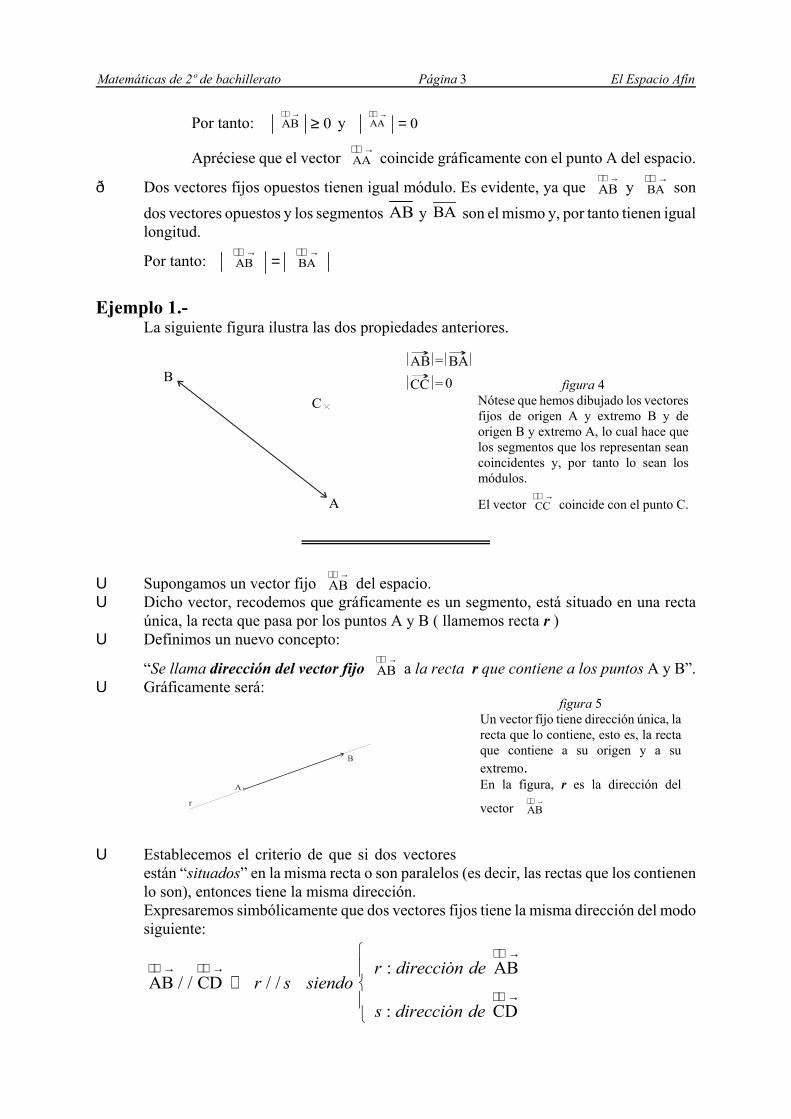
Ejemplo 1.-La siguiente figura ilustra las dos propiedades anteriores.
U Supongamos un vector fijo del espacio.AB →
U Dicho vector, recodemos que gráficamente es un segmento, está situado en una rectaúnica, la recta que pasa por los puntos A y B ( llamemos recta r )
U Definimos un nuevo concepto:
“Se llama dirección del vector fijo a la recta r que contiene a los puntos A y B”.AB →
U Gráficamente será:
U Establecemos el criterio de que si dos vectoresestán “situados” en la misma recta o son paralelos (es decir, las rectas que los contienenlo son), entonces tiene la misma dirección.Expresaremos simbólicamente que dos vectores fijos tiene la misma dirección del modosiguiente:
AB CDAB
CD
→ → →
→⇔
/ / / /: &
: &
r s siendor direccion de
s direccion de
figura 4Nótese que hemos dibujado los vectoresfijos de origen A y extremo B y deorigen B y extremo A, lo cual hace quelos segmentos que los representan seancoincidentes y, por tanto lo sean losmódulos.
El vector coincide con el punto C.CC →
figura 5Un vector fijo tiene dirección única, larecta que lo contiene, esto es, la rectaque contiene a su origen y a suextremo. En la figura, r es la dirección del
vector AB →

Matemáticas de 2º de bachillerato Página 4 El Espacio Afín
AA BB CC DD → → → →
/ / / / / / .etc
AB BA → →
/ /
donde representa que los vectores tiene la misma direccionr s representa que las rectas r y s son paralelas
: / / &
/ / .AB CD → →
U Consideraremos que los vectores fijo de módulo cero (aquellos cuyos puntos origen yextremo coinciden), no tienen dirección (su gráfica es un punto y, por tanto, por él pasaninfinitas rectas). También podemos considerar que todos esos vectores tienen la mismadirección. En definitiva:
U A dos vectores fijos del espacio les puede ocurrir que tengan la misma dirección (sonparalelos o coincidentes) o que tengan direcciones distintas.Es evidente que dos vectores fijos opuestos tiene la misma dirección, es decir:
Ejemplo 2.-
figura 6
Ejemplo 3.-
figura 7
En una dirección (una recta y sus paralelas) hay dos sentidos que se dicen contrarios.Esto significa que dos vectores que tengan la misma dirección (son paralelos ocoincidentes) pueden tener el mismo sentido o sentidos contrarios. Por tanto:
AB CD → →
⇔
/ /o bien tienen el mismo sentidoo bien tienen sentidos contrarios
En la figura 6 apreciamos lo siguiente:
AB CD EF
GG HH I I
→ → →
→ → →
/ / / /
/ / / /Nótese que las rectas r y s sonparalelas y, por tanto, representan lamisma dirección.
En la figura de la izquierda tenemosdos vectores fijos cuyas direccionesson distintas.
Matemáticas de 2º de bachillerato Página 5 El Espacio Afín
Se expresa :
AB CD AB CD
AB CD AB CD
→ → → →
→ → → →
↑
↓
significa que y tienen el mismo sentido
significa que y tienen sentidos contrarios
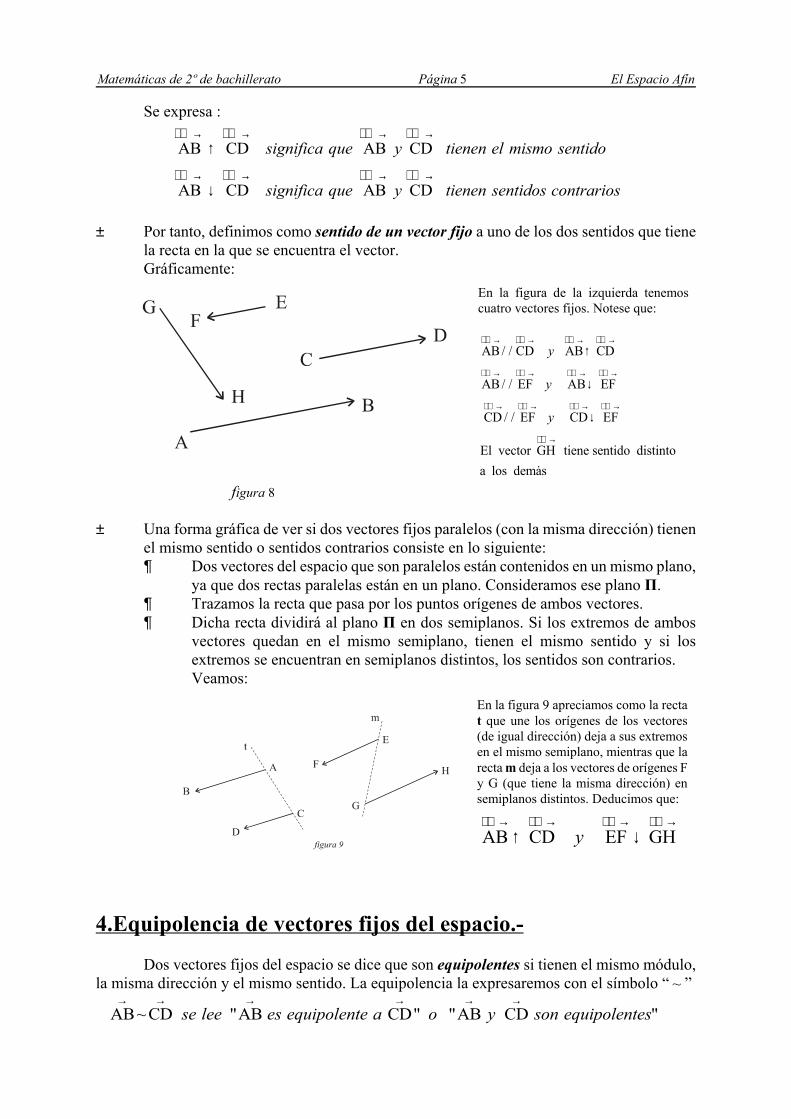
Por tanto, definimos como sentido de un vector fijo a uno de los dos sentidos que tienela recta en la que se encuentra el vector.Gráficamente:
figura 8
Una forma gráfica de ver si dos vectores fijos paralelos (con la misma dirección) tienenel mismo sentido o sentidos contrarios consiste en lo siguiente:• Dos vectores del espacio que son paralelos están contenidos en un mismo plano,
ya que dos rectas paralelas están en un plano. Consideramos ese plano Π.• Trazamos la recta que pasa por los puntos orígenes de ambos vectores.• Dicha recta dividirá al plano Π en dos semiplanos. Si los extremos de ambos
vectores quedan en el mismo semiplano, tienen el mismo sentido y si losextremos se encuentran en semiplanos distintos, los sentidos son contrarios.Veamos:
4.Equipolencia de vectores fijos del espacio.-
Dos vectores fijos del espacio se dice que son equipolentes si tienen el mismo módulo,la misma dirección y el mismo sentido. La equipolencia la expresaremos con el símbolo “ ”~
AB CD AB CD AB CD→ → → → → →
~ " " " "se lee es equipolente a o y son equipolentes
En la figura de la izquierda tenemoscuatro vectores fijos. Notese que:
AB CD AB CD
AB EF AB EF
CD EF CD EF
El vector GH tiene sentido distintoa los demas
→ → → →
→ → → →
→ → → →
→
↑
↓
↓
/ /
/ /
/ /
&
y
y
y
En la figura 9 apreciamos como la rectat que une los orígenes de los vectores(de igual dirección) deja a sus extremosen el mismo semiplano, mientras que larecta m deja a los vectores de orígenes Fy G (que tiene la misma dirección) ensemiplanos distintos. Deducimos que:
AB CD EF GH → → → →
↑ ↓y
Matemáticas de 2º de bachillerato Página 6 El Espacio Afín
Es decir:
AB CD
AB CD
AB CD
AB CD
→ →
→ →
→ →
→ →
⇔
=
↑
~ / /
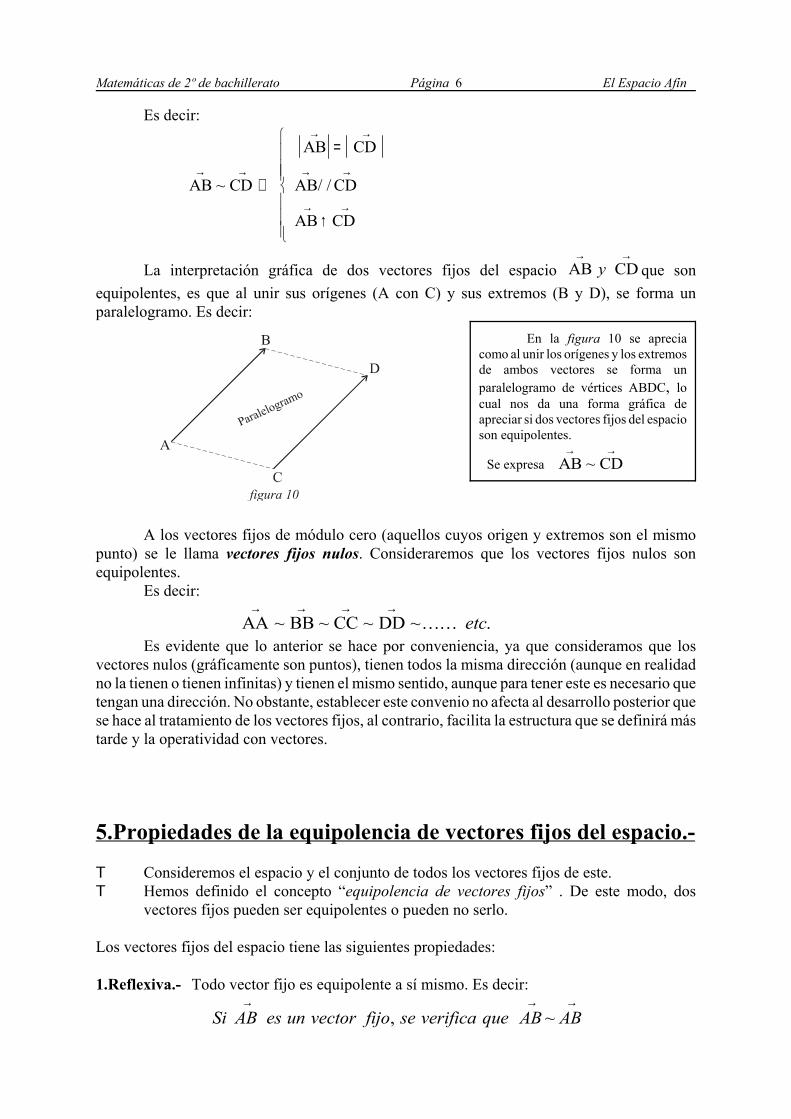
La interpretación gráfica de dos vectores fijos del espacio que sonAB CD→ →
yequipolentes, es que al unir sus orígenes (A con C) y sus extremos (B y D), se forma unparalelogramo. Es decir:
A los vectores fijos de módulo cero (aquellos cuyos origen y extremos son el mismopunto) se le llama vectores fijos nulos. Consideraremos que los vectores fijos nulos sonequipolentes.
Es decir:
AA BB CC DD→ → → →
~ ~ ~ ~ .KK etcEs evidente que lo anterior se hace por conveniencia, ya que consideramos que los
vectores nulos (gráficamente son puntos), tienen todos la misma dirección (aunque en realidadno la tienen o tienen infinitas) y tienen el mismo sentido, aunque para tener este es necesario quetengan una dirección. No obstante, establecer este convenio no afecta al desarrollo posterior quese hace al tratamiento de los vectores fijos, al contrario, facilita la estructura que se definirá mástarde y la operatividad con vectores.
5.Propiedades de la equipolencia de vectores fijos del espacio.-
T Consideremos el espacio y el conjunto de todos los vectores fijos de este.T Hemos definido el concepto “equipolencia de vectores fijos” . De este modo, dos
vectores fijos pueden ser equipolentes o pueden no serlo.
Los vectores fijos del espacio tiene las siguientes propiedades:
1.Reflexiva.- Todo vector fijo es equipolente a sí mismo. Es decir:
Si AB es un vector fijo se verifica que AB AB→ → →
, ~
En la figura 10 se apreciacomo al unir los orígenes y los extremosde ambos vectores se forma unparalelogramo de vértices ABDC, locual nos da una forma gráfica deapreciar si dos vectores fijos del espacioson equipolentes.
Se expresa AB CD→ →
~
Matemáticas de 2º de bachillerato Página 7 El Espacio Afín
En efecto:
AB AB
AB AB
AB AB
AB AB
→ →
→ →
→ →
→ →
=
↑
⇒/ / ~
2.Simétrica.- Si un vector es equipolente a otro, este es equipolente a aquel. Es decir:
Si entoncesAB CD CD AB→ → → →
~ ~En efecto:
AB CD
AB CD
AB CD
AB CD
C AB
CD AB
CD AB
CD AB→ →
→ →
→ →
→ →
→ →
→ →
→ →
→ →⇔
=
↑
⇔
=
↑
⇔~ / / / / ~
D
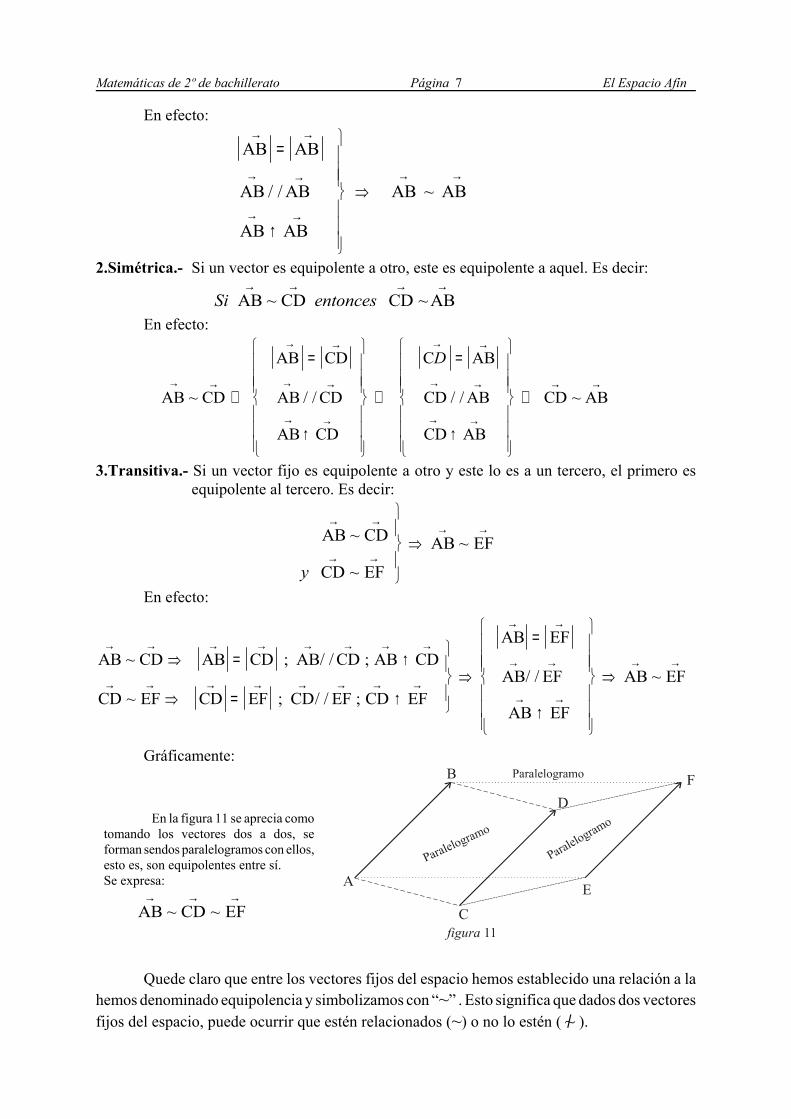
3.Transitiva.- Si un vector fijo es equipolente a otro y este lo es a un tercero, el primero esequipolente al tercero. Es decir:
AB CD
CD EF
AB EF→ →
→ →
→ →
⇒~
~
~
yEn efecto:
AB CD AB CD AB CD AB CD
CD EF CD EF CD EF CD EF
AB EF
AB EF
AB EF
AB EF
→ → → → → → → →
→ → → → → → → →
→ →
→ →
→ →
→ →⇒ = ↑
⇒ = ↑
⇒
=
↑
⇒~ ; / / ;
~ ; / / ;/ / ~
Gráficamente:
Quede claro que entre los vectores fijos del espacio hemos establecido una relación a lahemos denominado equipolencia y simbolizamos con “~” . Esto significa que dados dos vectoresfijos del espacio, puede ocurrir que estén relacionados (~) o no lo estén ( )./~
En la figura 11 se aprecia comotomando los vectores dos a dos, seforman sendos paralelogramos con ellos,esto es, son equipolentes entre sí.Se expresa:
AB CD EF→ → →
~ ~
Matemáticas de 2º de bachillerato Página 8 El Espacio Afín
6.Relación de equivalencia entre los vectores fijos del espacio.-
En general, si tenemos un conjunto y entre sus elementos establecemos una relación detal modo que dados dos elementos de ese conjunto, pueda ocurrir que estén relacionados o nolo estén y, además, esa relación tiene las propiedades reflexiva, simétrica y transitiva, se dice quedicha relación es “una relación de equivalencia” en ese conjunto.
En nuestro caso tenemos:T El conjunto de los vectores fijos del espacio.T La relación “equipolencia”, de tal modo que doa vectores fijos puede ser equipolentes
o no serlo.T Hemos visto que la equipolencia de vectores fijos del espacio es reflexiva, simétrica y
transitiva.Por tanto:
La equipolencia de vectores fijos del espacio es una relación de equivalencia.
7.Clase de equivalencia de vectores fijos del espacio.-
O Supongamos un vector fijo cualquiera del espacio. Le llamamos AB→
O Es evidente que existen infinitos vectores fijos del espacio que tienen igual módulo, lamisma dirección y el mismo sentido que .AB
→
O De lo anterior deducimos que existen infinitos vectores fijos del espacio que sonequipolentes a .AB
→
O El conjunto formado por los infinitos vectores fijo equipolentes a , se dice que es unaAB→
clase de equivalencia y se denomina “clase de equivalencia de los vectores fijos delespacio equipolentes a “AB
→
O El conjunto anterior se expresa de la forma . Por tanto:AB→
= Conjunto de los vectores fijos equipolentes a AB CD CD AB→ → → →
=
~ AB→
O Es evidente que existen infinitas clases de equivalencia en el conjunto de los vectoreslibres del espacio, es decir, existen infinitos conjuntos con infinitos vectores cada uno.Está claro que para cualquier vector tendremos la clase .XY
→XY→
8.Propiedades de las clases de equivalencia de vectores fijos.-
Supongamos un vector fijo del espacio y su clase .AB→
AB→
Se verifican las siguientes propiedades:
I.- El vector pertenece a la clase . Es decir, AB→
AB→
AB AB→ →
∈
Evidente, ya que y el conjunto lo forma todos los equipolentes a .AB AB→ →
~ AB→
AB→

Matemáticas de 2º de bachillerato Página 9 El Espacio Afín
AB CD AB CD→ → → →
/ ⇒
∩
=~ φ
II.- Si CD AB CD AB→ → → →
∈
=
entonces
En efecto:
• ∈
⇒ ⇒ ∈
• •
⊂
⊂
∗ ∀ ∈
⇒ ⇒ ⇒ ∈
⇒
⊂
∗ ∗ ∀ ∈
⇒ ⇒
→ → → → → →
→ → → →
→ → → → → → → → → → →
→ → → → →
CD AB CD AB AB CD
CD AB AB CD
XY CD XY CD XY CD AB XY AB CD AB
XY AB XY AB XY
~
~ ~ ~
~
Veamos que y que
~ ~
. . .
AB CD XY CD AB CD
AB CD
→ → → → → →
→ →
⇒ ∈
⇒
⊂
∗ ∗ ∗
=
De y deducimos que c q d
III.- Si Son dos vectores fijos del espacio que no son equipolentes, entonces susAB CD→ →
yclases respectivas no tienen ningún vector en común, es decir, su intersección es vacía.Matemáticamente:
En efecto:
• /
• • ∀ ∈
⇒ / ⇒ / ⇒ ∉
• • •
• • • •
∩
=
→ →
→ → → → → → → → →
→ →
→ →
Supongamos que
Del punto anterior se deduce que ningun vector de esta en
Es decir c q d
AB CD
XY AB XY AB CD XY CD XY CD
AB CD
AB CD
~
~ ~ ~
& &
, . . .φ
IV.- Supongamos un punto cualquiera del espacio, es decir, O 0E.
Sea un vector fijo cualquiera. Nótese que el origen es el punto A y el extremo otroAB→
punto B.Siempre es posible encontrar otro punto P tal que el vector es equipolente a .OP
→AB→
Es decir:
O un punto cualquiera
y AB vector fijo cualquieraP OP AB
∈
⇒ ∃ ∈→
→ →EE ~
Esta propiedad nos permite que dados dos o más vectores fijos no equipolentes, siemprepodremos encontrar otros vectores respectivamente equipolentes a ellos de tal modo quetengan el mismo origen O.Es decir:

Matemáticas de 2º de bachillerato Página 10 El Espacio Afín
OP AB→ →
=
Imaginemos tres vectores , , que no son equipolentes entre sí. SupongamosAB→
CD→
EF→
un punto O del espacio. Gráficamente:
Nótese que si entonces la clase de equivalencia (también llamada deAB CD→ →
~
equipolencia) generada por ambos vectores es exactamente la misma, es decir, .AB CD→ →
=
Si expresamos , el vector es el “representante de la clase”AB→
AB→
Si expresamos , en este caso, es el “representante de la clase” es .CD→
CD→
Por tanto, si tenemos una clase identificada por un representante de ella , podemosAB→
expresarla por medio de otro representante cuyo origen sea el punto O. Es decir:
9.Vector libre del espacio.-
Según lo visto anteriormente, los vectores fijos del espacio se pueden clasificar en clasesde equivalencia, de tal modo que un vector fijo pertenece a una de las infinitas clase y sólo a una.Recordemos que los infinitos vectores de una misma clase son equipolentes entre sí.
Definimos un nuevo concepto:
Por tanto, un vector libre del espacio es un conjunto de infinitos vectores fijosequipolentes entre sí. Se expresa habitualmente con letras minúsculas, de la forma .
raEs decir:
ra vector libre del espacio=
= =
→OA
conjunto de infinitos vectores fijos equipolentes entre si.
figura 12Podemos encontrar tres vectoresequipolentes a los tres dados, tales quetengan el mismo origen O, es decir:
OP AB
OQ CD
OR EF
→ →
→ →
→ →
~
~
~
“Cada una de las clases de equipolencia (o de equivalencia)de vectores fijos se dice que es un vector libre del espacio”

Matemáticas de 2º de bachillerato Página 11 El Espacio Afín
Dado que existen infinitas clases de equipolencia, existen infinitos vectores libres.
Es evidente que si , entonces .OA BC→ →
~ ra =
=
→ →OA BC
Gráficamente se interpreta que con dibujar un vector de la clase, quedan representadostodos los vectores fijos de esa clase. También se interpreta como que un vector libre es un vectorfijo que puede desplazarse por el espacio de forma horizontal y vertical, si realizar giros y sinmodificar su módulo.
Veamos:
Ejemplo 4.-
Al conjunto de los vectores libres del espacio lo representaremos de la forma V3
V a vector fijo del espacio3 = =
→ →r AB AB
10.Módulo, dirección y sentido de un vector libre del espacio.-3 Sea un vector libre dele espacio, es decir, ra =
→AB
ra ∈ V3
3 Todos los vectores fijos del conjunto tiene el mismo módulo, es decir, AB→
AB
→
En la figura 13 tenemos un vector libre ra
que representa a todos los vectores fijos de
la clase . AB→
En el dibujo hemos representado al vector
y algunos de sus infinitosAB→
equipolentes. El alumno debe entender que dibujandoúnicamente al vector , quedan
rarepresentados todos los de la clase .AB
→
En este ejemplo hemos representadodos vectores libres . Además, como
r ra y b
los vectores libres “tienen movilidad”, loshemos llevado a que coincidan en un mismoorigen O. Quede claro que un vector librepuede estar situado en cualquier punto delespacio.

Matemáticas de 2º de bachillerato Página 12 El Espacio Afín
4 Definimos “módulo del vector libre “ como el módulo de cualquiera de los vectoresra
fijos del conjunto . Se expresa .AB→
ra
Por tanto: modulo ABde a ar r= =→
3 Todos los vectores fijos del conjunto tienen la misma dirección (son paralelos). AB→
Es decir, ∀ ∈
→ → → → →CD EF AB CD EF, , / /es
4 Definimos “dirección del vector libre “ como la dirección de cualquiera de losra
vectores fijos del conjunto .AB→
Por tanto: direccion de a direccion de& &r =
→AB
3 Todo los vectores fijos del conjunto tienen el mismo sentido.AB→
Definimos “Sentido del vector libre “ como el sentido de cualquiera de los vectoresra
fijos del conjunto .AB→
Por tanto: sentido de a sentido der =→
AB
11.Suma de vectores libres del espacio.-- Sea el conjunto de los vectores libres del espacio, es decir, .V3
- Sean dos vectores libres, es decir, r rx e y=
=
→ →AB CD
r rx y, V∈ 3
Vamos a definir la suma de vectores libres del espacio de un modo gráfico:
figura 15
figura 15.aTenemos dos vectoresl i b r e s q u e
r rx e yqueremos sumar.Elegimos un punto Ocualquiera del espacio,donde queramos que“aparezca” el vectorresultado de la suma.
figura 15.bSituamos el vector libre
haciendo origen en elrx
punto O. Tendremos asíun vector fijo de la claseque representa .
rxEste vector tiene unorigen y un extremo A(que no representamos).
figura 15.cSituamos el vector libre
haciendo origen en elry
extremo de .rx =
→OA
Tendremos así un vectorfijo de la clase cuyo
ryorigen es A y extremos B(puntos que no representamos)
figura 15.dConstruimos el vector deorigen O y extremo B(extremo de ). Este
ryvector fijo es unrepresentante de la clase
, es decir, es elr rx y+
vector libre suma der rx e y

Matemáticas de 2º de bachillerato Página 13 El Espacio Afín
a
a
a+a
Ahora vamos a construir el vector suma por otro procedimiento. Se denomina “métodor rx y+
del paralelogramo”.Nótese que el resultado es el mismo:
figura 16
figura 16.aTenemos dos vectoresl i b r e s q u e
r rx e yqueremos sumar.Elegimos un punto Ocualquiera del espacio,donde queramos que“aparezca” el vectorresultado de la suma.
figura 16.bSituamos el vector libre
haciendo origen en elrx
punto O. Tendremos asíun vector fijo de la claseque representa .
rxEste vector tiene unorigen y un extremo A(que no representamos).
figura 16.cSituamos el vector libre
hac iendo or igenry
también en O. Tenemosasí un vector fijo de laclase cuyo origen es O
ryy extremos C (punto norepresentado).Con losvectores hacemos
r rx e yun paralelogramo.
figura 16.dConstruimos el vector deorigen O y extremo elvértice opuesto a O delparalelogramo (diagonalde este). Este vector fijoes un representante de laclase , es decir,
r rx y+es el vector libre suma der rx e y
Ejemplo 5.-Dado el vector libre del espacio, de la
rafigura 17, queremos hallar el vector suma
r ra a+Veamos:
Ejemplo 6.-En este ejemplo vemos como se suman
un vector libre cualquiera y un vector librera
de módulo cero, es decir, el vector librero =
→AA
a
figura 17
² figura 18Hemos situado el vector libre en un puntoracualquiera del espacio y a continuación hemosvuelto a poner . Desde el punto elegidorahasta el extremo final es el vector , el
r ra a+cual hemos desplazado nuevamente para unamejor visualización.

Matemáticas de 2º de bachillerato Página 14 El Espacio Afín
12.Propiedades de la suma de vectores libres del espacio.-
& Hemos definido la suma de vectores libres del espacio, es decir, la suma en .V3
& Ahora veremos las propiedades de esta.
1.Ley de composición interna.-“La suma de dos vectores libres del espacio es otro vector libre del espacio”
Es decir: ∀ ∈ + = ∈r r r r rx y se verifica que x y z, ,V V3 3
Se dice que la suma en el conjunto V3 es una operación interna (o ley de composicióninterna).
2.Asociativa.-“La suma de vectores libres del espacio es asociativa”
Es decir:
( ) ( )∀ ∈ + + = + +r r r r r r r r rx y z se verifica que x y z x y z, , ,V3
Esta propiedad nos dice que para sumar tres vectores libres, podemos sumar al primerode los sumandos el resultados de la suma del segundo y tercero, o bien, sumar los dosprimeros y el resultado sumárselo al tercero.
Demostración:La siguiente figura demuestra la propiedad asociativa de la suma en V3.
figura 20
figura 20.aTenemos los tres vectores libres quequeremos sumar,
r r rx y z, ,Hemos elegido un punto cualquieraO donde situaremos el resultado dela suma.El resultado será:
( ) ( )r r r r r rx y z x y z+ + = + +
figura 20.bTomado como origen el punto Ohemos sumado .
r rx e yPosteriormente al vector
r rx y+le hemos sumado el vector y
rzobtenido ( )r r rx y z+ +
figura 20.cEn un punto distinto de O hemosobtenido .
r ry z+Posteriormente, tomando origenen O, al vector le hemos
rxsumado el vector .
r ry z+
Obtenemos así ( )r r rx y z+ +

Matemáticas de 2º de bachillerato Página 15 El Espacio Afín
rLL KKo siendo puntos del espacio=
=
=
=→ → →
AA BB CC A B C, , , ,
Puede expresarse ( ) ( )r r r r r r r r rx y z x y z x y z+ + = + + = + +
3.Conmutativa.-“La suma de vectores libres del espacio es conmutativa”
Es decir: ∀ ∈ + = +r r r r r rx y se verifica que x y y x, V3
Demostración:La siguiente figura demuestra la propiedad conmutativa de la suma en V3.
figura 21
figura 21.aTenemos los dos vectores libres quequeremos sumar,
r rx y,Hemos elegido un punto cualquieraO donde situaremos el resultado dela suma.El resultado será: r r r rx y y x+ = +
figura 21.bTomado como origen el punto Ohemos sumado .
r rx e yObtenemos así el vector sumar rx y+
figura 21.cEn este caso hemos obtenido lasuma .
r ry x+Apréciese que se verifica laigualdad .
r r r rx y y x+ = +
4.Existencia de elemento neutro.-“Existe un vector (al que llamaremos vector nulo o vector cero) que es el neutro de lasuma en V3 , es decir, cualquier vector sumado con el vector nulo es ese vector”.
Al vector nulo (o vector cero) lo expresaremos de la forma ro
Matemáticamente:
∃ ∈ ∀ ∈ + = + =r r r r r r ro x se verifica que x o o x xV V3 3
El vector nulo es el vector libre formado por el conjunto de todos los vectores fijosro
nulos, es decir, aquellos cuyo origen y extremo coinciden. Gráficamente sería un punto
Es evidente que al sumar obtenemos (ver ejemplo 6).r rx y o rx

Matemáticas de 2º de bachillerato Página 16 El Espacio Afín
5.Existencia de elemento opuesto o simétrico.-“Todo vector libre tiene opuesto respecto de la suma, es decir, dado un vector librecualquiera, existe otro tal que sumados ambos el resultado es el vector nulo”.
Si es un vector libre, el opuesto de lo expresamos de la forma .rx rx − rx
Por tanto, (también se llama simétrico de )opuesto de x xr r= −rx
Matemáticamente:
∀ ∈ ∃ − ∈ + − =r r r r rx x x x oV V3 3, ( ) ( )Supongamos un vector libre cualquiera. ¿Como es su opuesto? ¿Cómo es ?
rx − rxVeamos:
El opuesto de , es decir, es un vectorrx − rx
que tiene igual módulo que , la mismarx
dirección y sentido contrario, es decir:r r
r r
r r
x xx xx x
= −−
↓ −
/ / ( )( )
En la figura 22 tenemos representados unvector libre y su opuesto .
rx − rxQuede claro que es el opuesto de y− rx rx
es el opuesto de .rx − rx
Ahora demostraremos gráficamente que la suma de y es el vector cero :rx − rx ro
figura 23
figura 23.aT e n e m o s d o s v e c t o r e sopuestos y un punto
r rx xy −cualquiera O que será el origen dela suma
r rx x+ −( )
figura 23.bTrasladamos el vector libre al
rxpunto O.
figura 23.cTrasladamos el vector − rxhaciendo origen en el extremo de
. Unimos el origen de con elrx rx
extremo de . Obtenemos − rx ro
Es evidente que el opuesto del vector cero es el propio vector cero, es decir:opuesto de o o o ya que o o or r r r r r= − = + − =, ( )
figura 22
Matemáticas de 2º de bachillerato Página 17 El Espacio Afín
13.El grupo conmutativo de los vectores libres del espacio.-
4 Hemos definido el conjunto de los vectores libres del espacio y llamado V3.4 Hemos definido la suma de vectores libres del espacio, es decir, la suma en V3. La suma
es una operación o ley de composición interna, esto es, si operamos dos elementos de V3,el resultado es otro elemento de de V3.
4 Un conjunto dotado de una ley de composición interna, se dice que es una estructura.4 El conjunto de los vectores libres del espacio, con la operación suma es una estructura.
Se expresa:
( )V3,+ estructura de los vectores libres del espacio4 Un conjunto con una operación que tiene las propiedades:
8 Ley de composición interna.8 Asociativa.8 Conmutativa.8 Existencia de elemento neutro.8 Existencia de elemento opuesto.
se dice que tiene estructura de grupo conmutativo o grupo abeliano.4 Por tanto:
14.Resta de vectores libres del espacio.-
, Sean dos vectores libres del espacio, es decir, .r ra y b r r
a b, ∈ V3
, Vamos a definir la resta de los vectores : r ra y b r r
a menos b" "r r r r r ra menos b a b a b= − = + −( )
Es decir: “Definimos la resta como la suma de con el opuesto de “r r
a menos b" "ra
rb
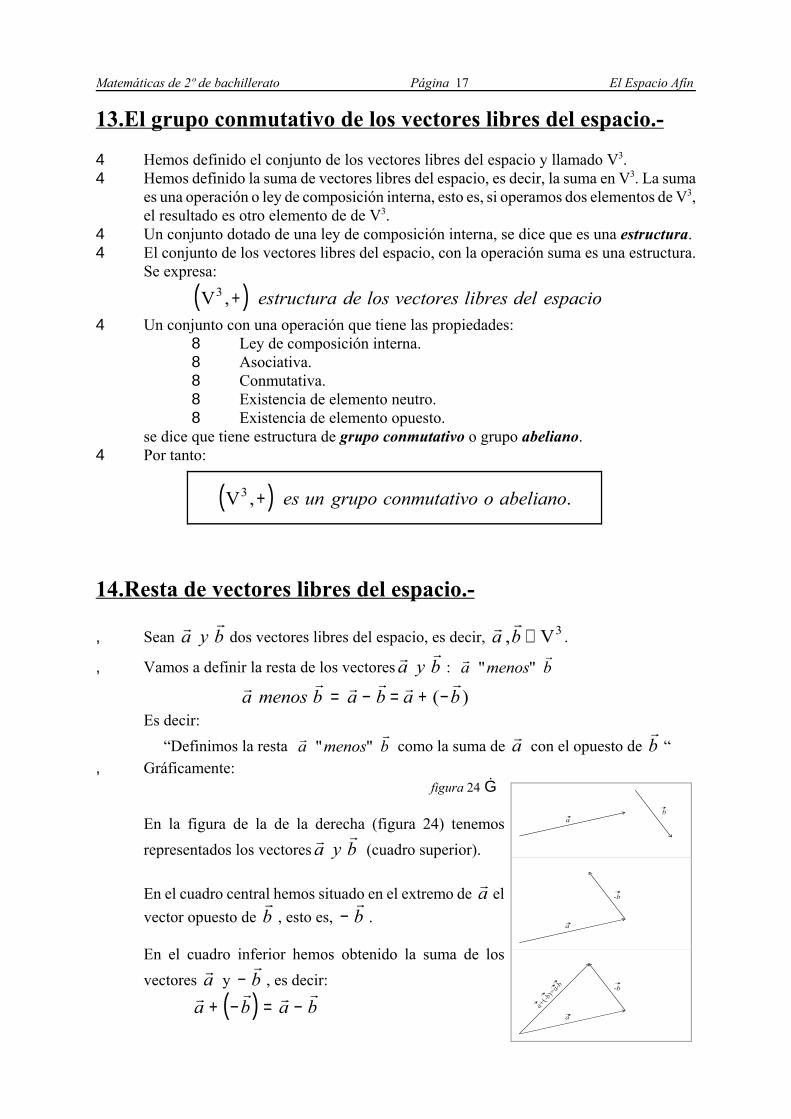
, Gráficamente:figura 24 ÿ
En la figura de la de la derecha (figura 24) tenemosrepresentados los vectores (cuadro superior).
r ra y b
En el cuadro central hemos situado en el extremo de elra
vector opuesto de , esto es, .rb −
rb
En el cuadro inferior hemos obtenido la suma de losvectores y , es decir:
ra −rb
( )r r r ra b a b+ − = −
( )V3, .+ es un grupo conmutativo o abeliano

Matemáticas de 2º de bachillerato Página 18 El Espacio Afín
15.Producto de un número real por un vector libre del espacio.-
ú Sea α un número real cualquiera, es decir, α 0 ú.ú Sea * α * su valor absoluto. Recordemos que * α * $0.ú Sea un vector libre del espacio, es decir, .
rx rx ∈ V3
Vamos a definir el “producto del número real α por el vector libre del espacio “ rx
Veamos:
ü El producto de α por es un vector libre que expresaremos o mejor rx α ⋅ rx α rx
ü Las características de dependerán del signo de α. Veamos:α rxý Si α>0 entonces :
Caracteristicas de xx xx x
x x
αα ααα
r
r r
r r
r r: / /
= ⋅
↑
Es decir:& Módulo de = módulo de α rx rx& El vector tiene la misma dirección que α rx rx& El vector tiene el mismo sentido que α rx rx
ý Si α<0 entonces :
Caracteristicas de xx xx xx x
αα ααα
r
r r
r r
r r: / /
= ⋅
↓
Es decir:& Módulo de = módulo de α rx rx& El vector tiene la misma dirección que α rx rx& El vector tiene el sentido contrario a α rx rx
ý Si α=0 entonces ya que α r r rx x o= =0 0 0 0 0r r rx x x= ⋅ = ⋅ =Es decir:
& Módulo de es cero.0 rx& El vector cero no tiene dirección.& El vector cero no tiene sentido.
Ejemplo 7.-En la figura 25 tenemos representada una unidad de longitud u y un vector libre cuyo
rxmódulo es 3, es decir, su longitud es de 3 unidades, es decir:
rx = 3

Matemáticas de 2º de bachillerato Página 19 El Espacio Afín
( ) ( ) ( ) ( ) ( )
( ) ( )
55
34
14
14
14
23
13
13
13
13
r r r r r r
r r r r r r r r r r r
r r r r r r r r r
x x x x x xx x x x x x x x x x x
x x x x x x x x x
= + + + +− = − + − + − + − + − = − − − − −
= + + − = − − = − + −;
figura 25
Apréciese que
r r r
r r r rx x xx x x x
+ =+ + ′ = ′
20 5 2 5
Ejemplo 8.-
figura 26
Apréciese que ( ) ( )− + − = −− − − ′ = − ′
r r r
r r r rx x xx x x x
20 5 2 5
Si es un número vector libre cualquiera, del espacio, el producto de un número realrx
por el vector , puede expresarse en forma de suma. rx
Veamos un ejemplo:
Ejemplo 9.-
En la figura de la izquierda apreciamos lo siguiente:O Vector
r ra x= 2r r r
r r r ra x x
a x y a x
= = ⋅ = ⋅ =
↑
2 2 2 3 6
/ /O Vector
r rb x= ′2 5r r r
r r r rb x x
b x y b x
= ′ = ′ ⋅ = ′ ⋅ = ′
↑
2 5 2 5 2 5 3 7 5
/ /X Vector
r rc x= ′0 5r r r
r r r rc x x
c x y c x
= ′ = ′ ⋅ = ′ ⋅ = ′
↑
0 5 0 5 0 5 3 1 5
/ /
En la figura de la derecha apreciamos lo siguiente:, Vector
r ra x= −2
r r r
r r r ra x x
a x y a x
= − = − ⋅ = ⋅ =
↓
2 2 2 3 6
/ /, Vector
r rb x= − ′2 5
r r r
r r r rb x x
b x y b x
= − ′ = − ′ ⋅ = ′ ⋅ = ′
↓
2 5 2 5 2 5 3 7 5
/ /, Vector
r rc x= − ′0 5
r r r
r r r rc x x
c x y c x
= − ′ = − ′ ⋅ = ′ ⋅ = ′
↓
0 5 0 5 0 5 3 1 5
/ /

Matemáticas de 2º de bachillerato Página 20 El Espacio Afín
( )
&
&
α β⋅ ⋅
↓ ↓
↓
rx
Producto de numero por vectorProducto de numeros
( )α β⋅ ⋅
↓ ↓
↓
rx
Producto de numero por vectorProducto de numero por vector
&
&
16.Propiedades del producto de un nº real por un vector libre.-
’ Hemos visto el producto de un número real por un vector libre del espacio, es decir, elproducto de un α 0ú por un . Se trata de una operación.
rx ∈ V3
’ Veamos las propiedades que tiene esta operación:
1.Ley de composición externa.-“El producto de un número real por un vector libre es otro vector libre del espacio”
Matemáticamente:∀ ∈ ∀ ∈ ∈α αR V Vy x se verifica que xr r3 3
Otra forma de expresar esta propiedad es como una aplicación del conjunto enR V× 3
el conjunto . Es decir:V3
R V V× →
→
3 3
( , )( , )
α αα αr r
r r
x xA cada par x le corresponde un vector x
2.Asociativa.-( )∀ ∈ ∀ ∈ ⋅ ⋅ = ⋅ ⋅α β α β α β, ( )R Vy x se verifica que x xr r r3
En esta propiedad destacamos los siguientes detalles:
En general los “puntos” (·) suelen omitirse cuando no existe confusión posible, es decir,podemos poner o en ocasiones ( ) ( )α β α βr rx x= ( ) ( )α β α β⋅ =r rx x
Ejemplo 10.-En la figura 27 tenemos una unidad de longitud ( u ) y un vector libre .
rxHemos construido los vectores 2 3 2 3 2r r rx x y x, ( ) ( )⋅Obsérvese que figura 273 2 3 2 6( ) ( )r r rx x x= ⋅ =

Matemáticas de 2º de bachillerato Página 21 El Espacio Afín
α ( )
&
r rx y
suma de vectoresproducto de numero por vector
+
↑ ↑
↑
α αr rx y
suma de vectores
+
↑
3.Distributividad respecto de la suma de números reales.-∀ ∈ ∀ ∈ + = +α β α β α β, , ( )R Vy x se verifica que x x xr r r r3
Observa lo siguiente:
( )
&
α β α β+ = +↑ ↑
r r r
6 74 84 674 84
x x x
suma denumeros
suma devectores
Ejemplo 11.-En la figura 28 tenemos una unidad de longitud y un vector libre .
rxHemos construido los vectores 2 3 2 3 2 3r r r r rx x x x y x, , ( )+ +Obsérvese que 5 2 3 2 3r r r rx x x x= + = +( )
4.Distributividad respecto de la suma de vectores.-∀ ∈ ∀ ∈ + = +α α α αR Vy x y se verifica que x y x yr r r r r r, , ( )3
Observa lo siguiente:
Ejemplo 12.-En este ejemplo comprobamos la propiedad anterior de modo gráfico. figura 29

Matemáticas de 2º de bachillerato Página 22 El Espacio Afín
figura 29.aTenemos dos vectores libresdel espacio,
r rx e y.L o s h e mos s i t u a d o shaciéndoles coincidir en unmismo punto.
figura 29.bHemos sumado los vectorespara obtener y
r rx y+posteriormente obtenemos elvector 2 ( )r rx y+
figura 29.cEn este caso hemosconstruido , los2 2r rx y yhemos sumado y obtenido elvector .2 2r rx y+
Puede apreciarse con una regla o compás como los vectores y tienen el2 ( )r rx y+ 2 2r rx y+mismo tamaño (igual módulo), además de la misma dirección (son paralelos) y el mismo sentido.
5.Producto de 1 por un vector libre.-“El producto del número real 1 por un vector libre cualquiera, es ese vector libre”
Matemáticamente:∀ ∈ =r r rx se verifica que x xR , 1
En efecto:
! 1 1 1r r r rx x x x= ⋅ = ⋅ =! por ser producto de un número real por un vector1 r rx x/ /
! por ser 1>01 r rx x↑Por tanto, 1 r rx x=
17.El espacio vectorial de los vectores libres del espacio.-
Recordemos lo que hemos visto anteriormente:" Vector libre del espacio. El conjunto de los vectores libres del espacio V3." Suma de vectores libres del espacio. Propiedades de la suma." El grupo conmutativo de los vectores libres del espacio. ( V3 , + )." Producto de un número real por un vector libre del espacio. Propiedades.
Pues bien , el conjunto de los vectores libres del espacio con las operaciones suma yproducto de un número real por un vector y las propiedades vistas, se dice que tiene estructurade “Espacio vectorial sobre ú”
Se expresa ( V3 , + , · ú ) , donde + representa la suma de vectores y · ú el producto denumero real por vector.
También puede expresarse V3 ( ú ).Por tanto:
Espacio vectorial de los vectores libres del espacio ( , , )
( )
V R
V R
3
3
+ ⋅
Re :int : ,
:cuerda
es la operacion erna en x y es x y z
es la operacion externa en y x es x
+ ∀ ∈ + = ∈
⋅ ∀ ∈ ∀ ∈ ∈
V V V
V R V V
3 3 3
3 3 3
r r r r r
r rα α

Matemáticas de 2º de bachillerato Página 23 El Espacio Afín
18.Otras propiedades de la operación externa de V3 (ú).-
Las propiedades del producto de un número real por un vector vistas anteriormente enel apartado 16, son axiomáticas, es decir, se deducen de la propia definición. Las propiedadesque veremos a continuación se deducen o demuestran de las axiomáticas. Veamos:
Propiedad I.- “El producto del número real 0 por un vector libre cualquiera es el vector libre “voEs decir: 0 r rx o=
Demostración:∀ ∈
∀ ∈⇒ = + = + ⇒ =
αα α α
R
xx x x x x o c q drr r r r r r
V3 0 0 0( ) . . .
Propiedad II.-“El producto de un número real cualquiera por el vector libre es el vector libre “vo voEs decir: α r ro o=
Demostración:∀ ∈
∀ ∈⇒ = + = + ⇒ =
αα α α α α
R
xx x o x o o o c q drr r r r r r r
V3 ( ) . . .
Propiedad III.-“El producto de &1 por un vector libre cualquiera es igual al opuesto de ese vector”Es decir: ( )− = −1 r rx x
Demostración: [ ]r r r r r r r r r r
1 24444 34444r r
o x x x x x x o x es el opuesto de xx x
= = + − = + − = + − = ⇒ −− = −
0 1 1 1 1 1 11
( ) ( ) ( ) ( )( )
19.Combinación lineal de vectores libres del espacio .-$ Sean dos vectores de V3(ú).
r ru y v
Gráficamente se interpreta del siguiente modo:
Recuerdese que si puede ser r ru v/ / r r r ru v o u v↑ ↓
r r r ru es combinacion lineal de v u v& ⇔ ∃ ∈ =α αR
r r r ru es combinacion lineal de v u v& / /⇔
Matemáticas de 2º de bachillerato Página 24 El Espacio Afín
Ejemplo 13.-
Obsérvese que si es combinación lineal de , entonces es combinación lineal de .ru rv rv ru
En efecto:
{
r r r r r r r r r r r
r r
u comb lin de v u v u v v v v v u
v es combinacion lineal de usi
. .
&
⇒ = ⇒ = ⋅ = = = ⇒ = ⇒
⇒≠
α α α ααα αα 0
1 11
1
Nótese también que si dos vectores no tiene la misma dirección (no son paralelos), ninguno deellos es combinación lineal del otro.
$ Sean tres vectores de V3(ú).r r ru v y w,
“Se dice que el vector es combinación lineal de si existen dos números realesru r rv y w
α y β tales que “r r ru v w= +α β
Matemáticamente:
Definición gráfica:
Debe entenderse que dados dos vectores libres , siempre podemos encontrar unr rv y w
plano del espacio que contenga a esos vectores (no olvidar que los vectores libres pueden
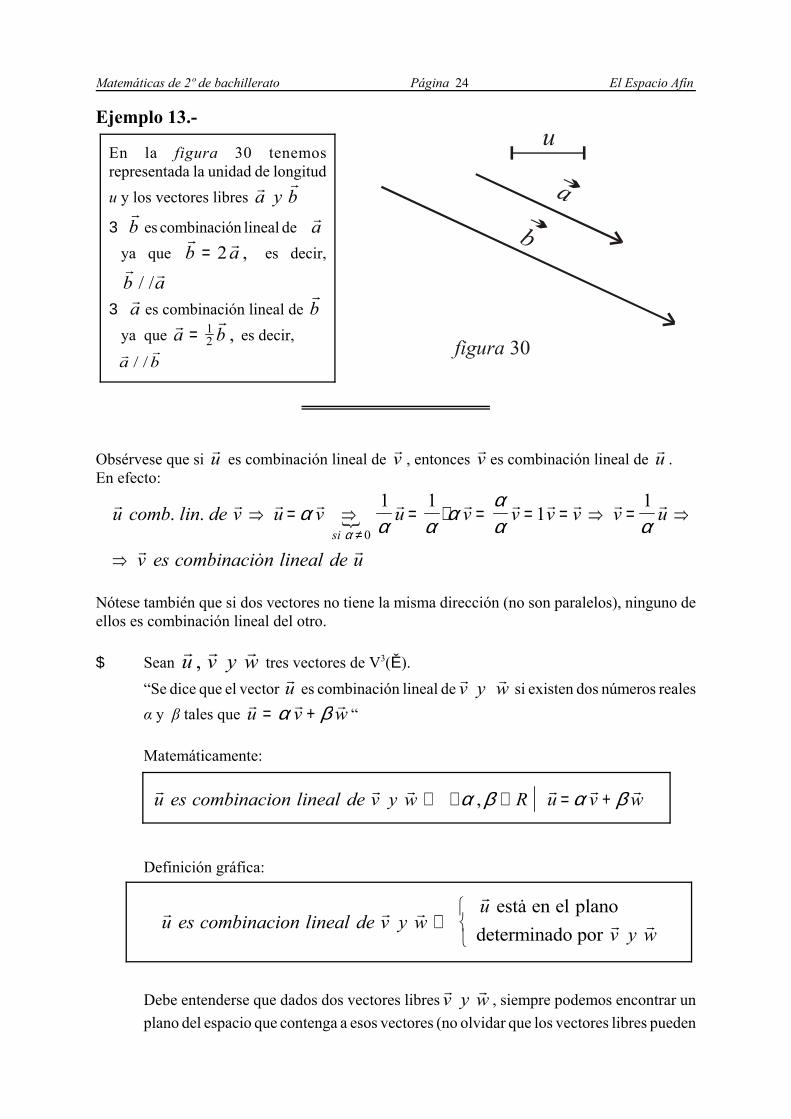
En la figura 30 tenemosrepresentada la unidad de longitudu y los vectores libres
r ra y b
3 es combinación lineal de rb ra
ya que es decir,r rb a= 2 ,
r rb a/ /
3 es combinación lineal de ra
rb
ya que es decir, r ra b= 1
2 , r ra b/ /
r r r r r ru es combinacion lineal de v y w R u v w⇔ ∃ ∈ = +α β α β,
r r rr
r ru es combinacion lineal de v y wu
v y w⇔
esta en el planodeterminado por
&
Matemáticas de 2º de bachillerato Página 25 El Espacio Afín
desplazarse). Pues bien, el vector es combinación lineal de los vectores siru r rv y w
también podemos “situarlo” en ese plano.En el caso en que sea imposible que el vector esté en un plano donde se encuentren
ru, decimos que no es combinación lineal de .
r rv y w ru r rv y w
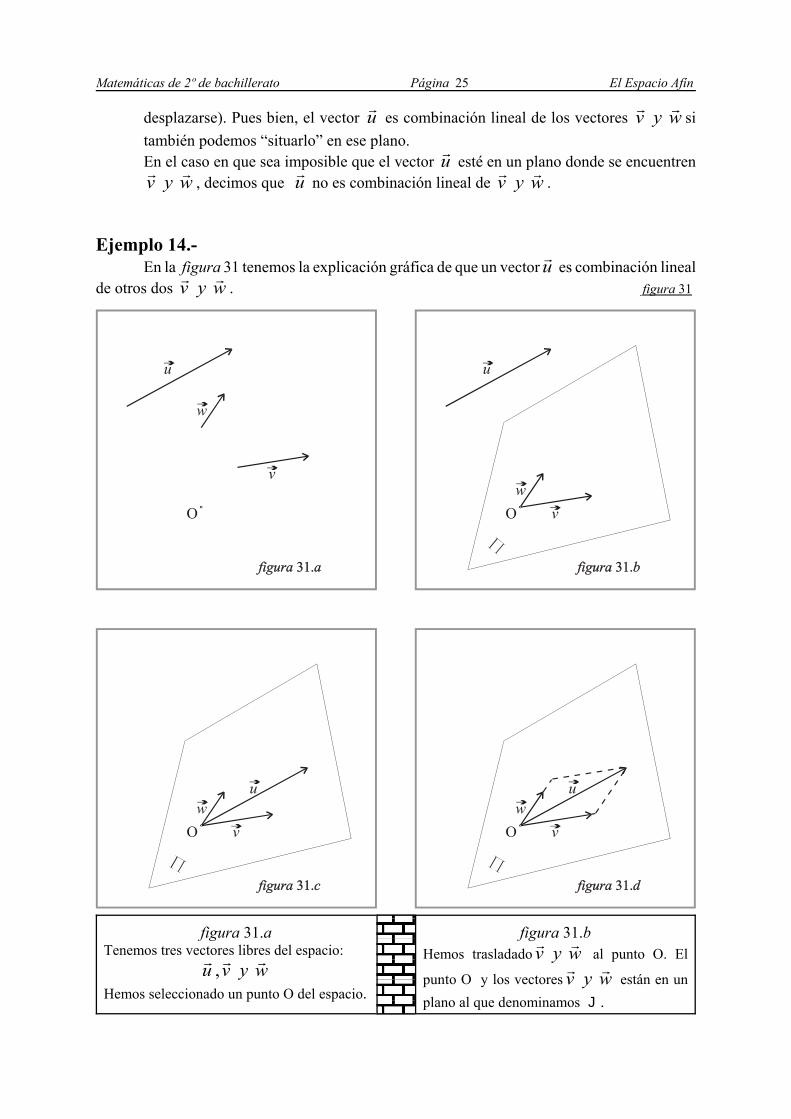
Ejemplo 14.-En la figura 31 tenemos la explicación gráfica de que un vector es combinación lineal
rude otros dos . figura 31
r rv y w
figura 31.aTenemos tres vectores libres del espacio:
r r ru v y w,Hemos seleccionado un punto O del espacio.
figura 31.bHemos trasladado al punto O. El
r rv y wpunto O y los vectores están en un
r rv y wplano al que denominamos J.
Matemáticas de 2º de bachillerato Página 26 El Espacio Afín
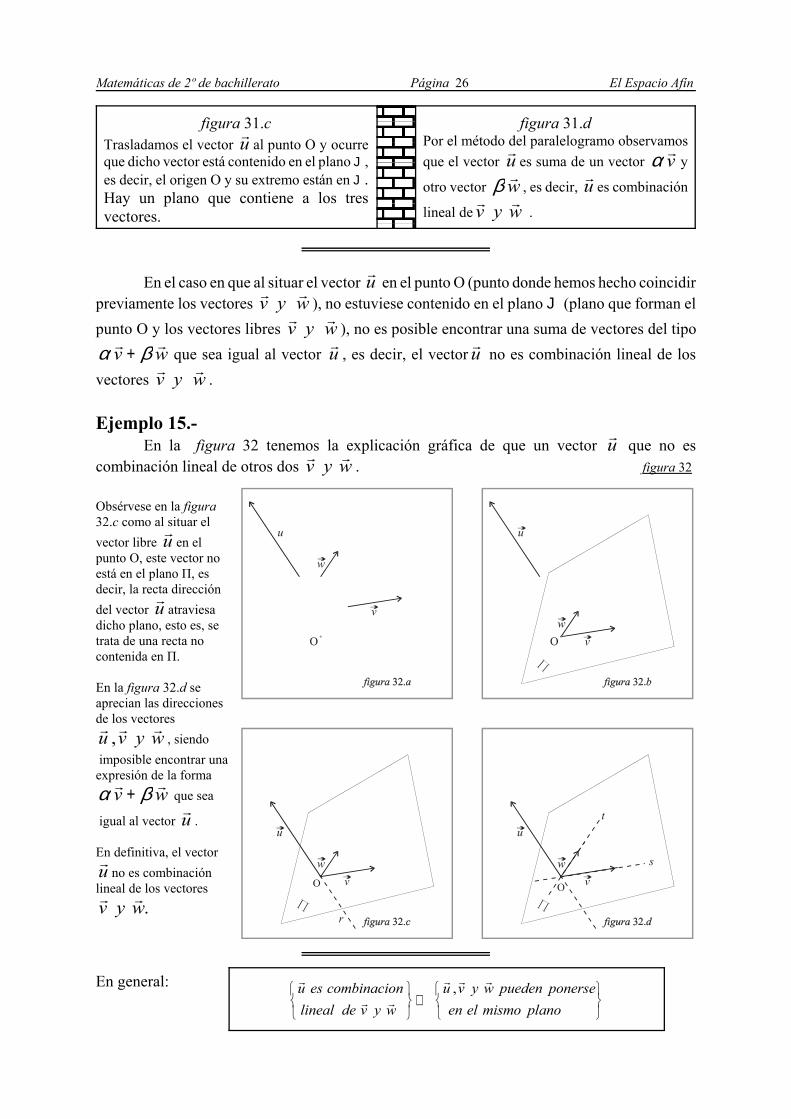
figura 31.cTrasladamos el vector al punto O y ocurre
ruque dicho vector está contenido en el plano J,es decir, el origen O y su extremo están en J.Hay un plano que contiene a los tresvectores.
figura 31.dPor el método del paralelogramo observamosque el vector es suma de un vector y
ru α rvotro vector , es decir, es combinaciónβ rw rulineal de .
r rv y w
En el caso en que al situar el vector en el punto O (punto donde hemos hecho coincidirru
previamente los vectores ), no estuviese contenido en el plano J (plano que forman elr rv y w
punto O y los vectores libres ), no es posible encontrar una suma de vectores del tipor rv y w
que sea igual al vector , es decir, el vector no es combinación lineal de losα βr rv w+ ru ruvectores .
r rv y w
Ejemplo 15.-En la figura 32 tenemos la explicación gráfica de que un vector que no es
rucombinación lineal de otros dos . figura 32
r rv y w
Obsérvese en la figura32.c como al situar elvector libre en el
rupunto O, este vector noestá en el plano Π, esdecir, la recta direccióndel vector atraviesa
rudicho plano, esto es, setrata de una recta nocontenida en Π.
En la figura 32.d seaprecian las direccionesde los vectores
, siendor r ru v y w,
imposible encontrar unaexpresión de la forma
que seaα βr rv w+ igual al vector .
ru
En definitiva, el vectorno es combinaciónru
lineal de los vectores r rv y w.
En general: r
r r
r r ru es combinacionlineal de v y w
u v y w pueden ponerseen el mismo plano
⇔
,

Matemáticas de 2º de bachillerato Página 27 El Espacio Afín
Si un vector libre (distinto de ) es combinación lineal de otros dos, entonces algunorode estos (o ambos) es combinación lineal de los otros dos. En efecto:S Supongamos que ( ) es combinación lineal de
ru r ru o≠r rv y w.
Esto significa que , siendo α y/o β distintos de cero.r r ru v w= +α β
S Supongamos que es . Entonces:α ≠ 0
α β α α α β αβα
r r r r r r r r rr
r rv u w v u w v u wv es combinacionlineal de u y w= − ⇒ ⋅ = ⋅ − ⇒ = − ⋅ ⇒
1 1 1( )
&
S Obsérvese el motivo de exigir que . Si fuese podría ser :r ru o≠ r ru o=r r r r r r r r ro v w v o w v o w= + ⇒ = − ⇒ /∃ ∈ = +0 0 0 0 α β α β, R
en cuyo caso no sería combinación lineal de , ni de .rv r ru y w
rw r ru y vS No obstante, obsérvese que puede ocurrir lo siguiente:
tales que r r r ru o v y w= ; r rv w= α
En este caso , es decir, es combinación lineal de .r r ro v w= − α r ru o= r rv y w
Despejando : , es decir, es combinación lineal de rv r r rv o w= + α rv r r ru o y w= .
Ejemplo 16.-Supongamos tres vectores libres del espacio, tales que .
r r ru v y w, r r ru v w= −23
14
Queremos expresar el vector como combinación lineal de los otros dos.rw
Veamos:r r r r r r r r r r r ru v w w v u w v u w v u= − = − ⋅ = ⋅ − = −2
314
14
23
14
23
834 4 4 4; ; ;
Tenemos así el vector como combinación lineal de los vectores rw r ru y v.
S Sean cuatro vectores de V3(ú).r r r rt u v y w, ,
“Se dice que el vector es combinación lineal de si existen tres númerosrt
r r ru v y w,reales α , β y γ tales que “
r r r rt u v w= + +α β γ
Matemáticamente:
Gráficamente :En este caso el vector puede obtenerse como la suma de un vector , que
rt α βr r ru v x+ =
estará en un plano donde se encuentren , con otro vector , que será paralelo al vectorr ru y v γ rw
, es decir, .rw
r r rt x w= + γEn la figura 33 hemos representado cuatro vectores, del espacio,
r r r rt u v y w, ,
expresando el vector como combinación lineal de los otros tres. Apréciese como es la sumart
rt
de un vector (que está en el plano determinado por ) y otro vector paraleloα βr r ru v x+ =r ru y v
a . En este dibujo se aprecia también que α > 0 , β > 0 y γ > 0 (no siempre debe ser así).rw
r r r r r r r rt es comb lineal de u v y w t u v w. , , ,⇔ ∃ ∈ = + +α β γ α β γR

Matemáticas de 2º de bachillerato Página 28 El Espacio Afín
En la figura 33 tenemos lo siguiente:i Los vectores situados en un
r r r rt u v y w, ,punto O.Queremos expresar como combinación
rt
lineal de r r ru v y w,
i Hemos determinado el plano que forman (plano Π ).
r ru y vHemos trazado desde el extremo de una
rt
paralela a la dirección de hasta que corta alrw
plano Π en un punto P.
i El vector libre es combinación rx =
→OP
lineal de .r r r r ru y v x u v( )= +α β
i El vector está en el plano que formanrt
, es decir, es combinación lineal der rx y w
rt
, en concreto .r rx y w
r rt x w= + γ
En definitiva :
j Del mismo modo podríamos obtener como combinación lineal de los otros tres, enru
concreto sería:
α β γ αβα
γα
r r r r r r r ru t v w u t v w= − − = − −; 1
También podríamos obtener como combinación lineal de los otros tres.r rv y w
20.Vectores libres del espacio linealmente dependientes .-
. Sean dos vectores libres del espacio, es decir, r ru y v r ru v, ( )∈ V R3
Matemáticamente:
r r r rt u v w= + +α β γ
“Se dice que son linealmente dependientes, si existen dos números reales αr ru y v
y β (alguno de ellos distinto de cero) tales que .”α βr r ru v o+ =
{r r r r ru y v son linealmente dependientes R u v o
a uno
⇔ ∃ ∈ + =≠
α β α β,lg 0
Matemáticas de 2º de bachillerato Página 29 El Espacio Afín
r r
r r r r
r r r
u v
u v y v uu v o
/ /
= =− =
αα
α1
Observa lo siguiente: Supongamos que son dos vectores libres linealmente dependientes.
r ru y v
Entonces, ∃ ∈ ≠ ≠ + =α β α β α β, ( )R 0 0o u v or r r
Supongamos que es α … 0. Entonces:
α ββα
r r r r r ru v u v Es decir u k v con k= − = − = ∈; . , R
Es decir, r ru es combinacion lineal de v&
Por tanto:
(*)
Matemáticamente:
Ahora nos preguntamos: ¿Si es combinación lineal de , serán linealmente dependientes?
ru rv r ru y vVeamos: Supongamos que es combinación lineal de .
ru rv Entonces ∃ ∈ =α αR u vr r
Entonces podemos poner que r r ru v o− =α
Por tanto, existen dos números, 1 y &α (el 1…0 ) tales que .1 r r ru v o− =α Deducimos que son linealmente dependientes.
r ru y vPor tanto:
(**)
De (*) y (**) deducimos que :
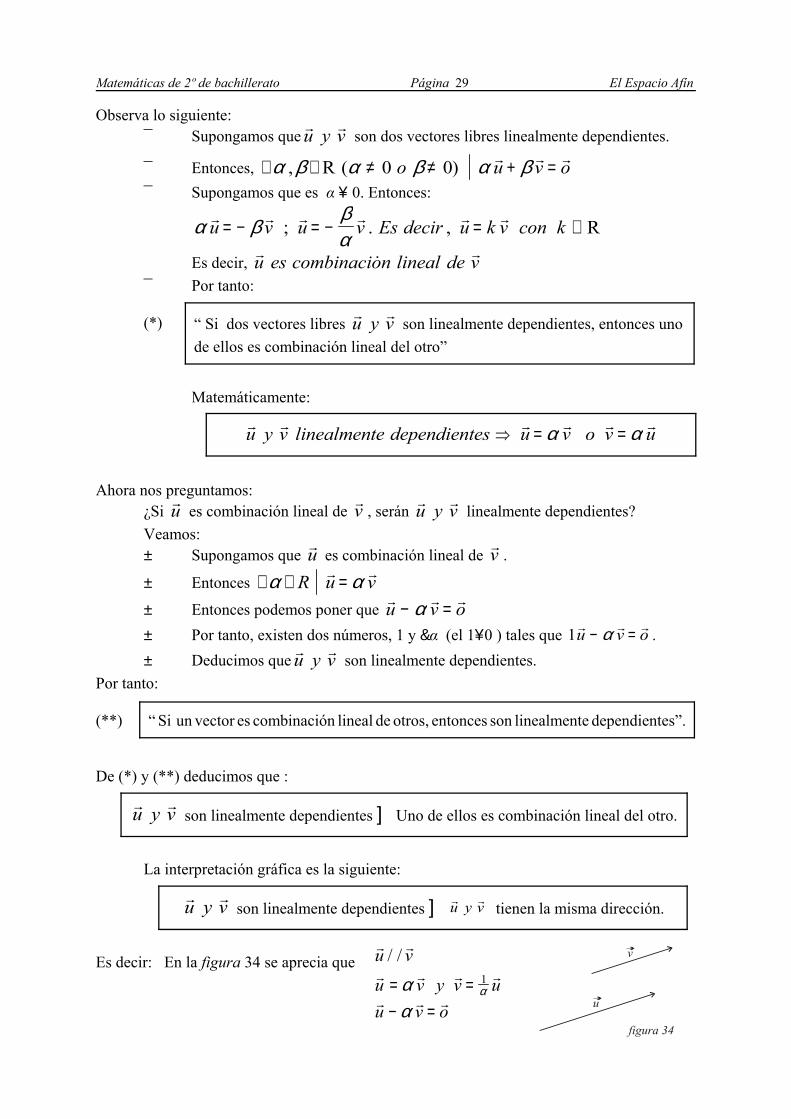
La interpretación gráfica es la siguiente:
Es decir: En la figura 34 se aprecia que
“ Si dos vectores libres son linealmente dependientes, entonces unor ru y v
de ellos es combinación lineal del otro”
“ Si un vector es combinación lineal de otros, entonces son linealmente dependientes”.
r r r r r ru y v linealmente dependientes u v o v u⇒ = =α α
son linealmente dependientes ] Uno de ellos es combinación lineal del otro.r ru y v
son linealmente dependientes ] tienen la misma dirección.r ru y v r ru y v

Matemáticas de 2º de bachillerato Página 30 El Espacio Afín
. Sean tres vectores libres del espacio, es decir, r r ru v y w, r r ru v w, , ( )∈ V R3
Matemáticamente:
En este caso también es válida la siguiente equivalencia:
Demostremos esta última equivalencia:⇒ ⇒ ∃ ∈ + + = ⇒
⇒ ≠ = − − ⇒ = − ⇒⇒ ⇒⇒
≠
) , , , ,
( )&
& ( . . )
lg
r r r123
r r r r
r r r r r r
r r r
u v w linealmente dependientes u v w o
u v w u v wu es combinacion lineal de v y wUno de los tres es combinacion lineal de losotros dos c q d
a uno
α β γ α β γ
α α β γ βα
γα
0
0
R
suponiendo
⇐ ⇒ ∃ ∈ = ⇒
⇒ − − = ⇒ ∃ − − ∈ − − = ⇒
⇒
) . ,
, ,, ( . . .).
Supongamos que u es comb lineal de v y w u v + w
u v w o u v w ou v y w son linealmente dependientes c q d
r r r r r r
r r r r r r r r
r r r
α β α β
α β α β α β
R
R1
La interpretación gráfica de que tres vectores libres del espacio sean linealmentedependientes es la siguiente:
Es decir: figura 35
son linealmente dependientes ] Uno de ellos es combinación lineal de los otros dos r r ru v y w,
r r ru v y w son linealmente dependientesLos tres vectores puedensituarse en un mismo plano, ⇔
“Se dice que son linealmente dependientes, si existen tres números realesr r ru v y w,
α, β y γ (alguno de ellos distinto de cero) tales que .”α β γr r r ru v w o+ + =
r r r123
r r r ru v y w son linealmente dependientes u v w oa uno
, , ,lg
⇔ ∃ ∈ + + =≠
α β γ α β γ0
R
Matemáticas de 2º de bachillerato Página 31 El Espacio Afín
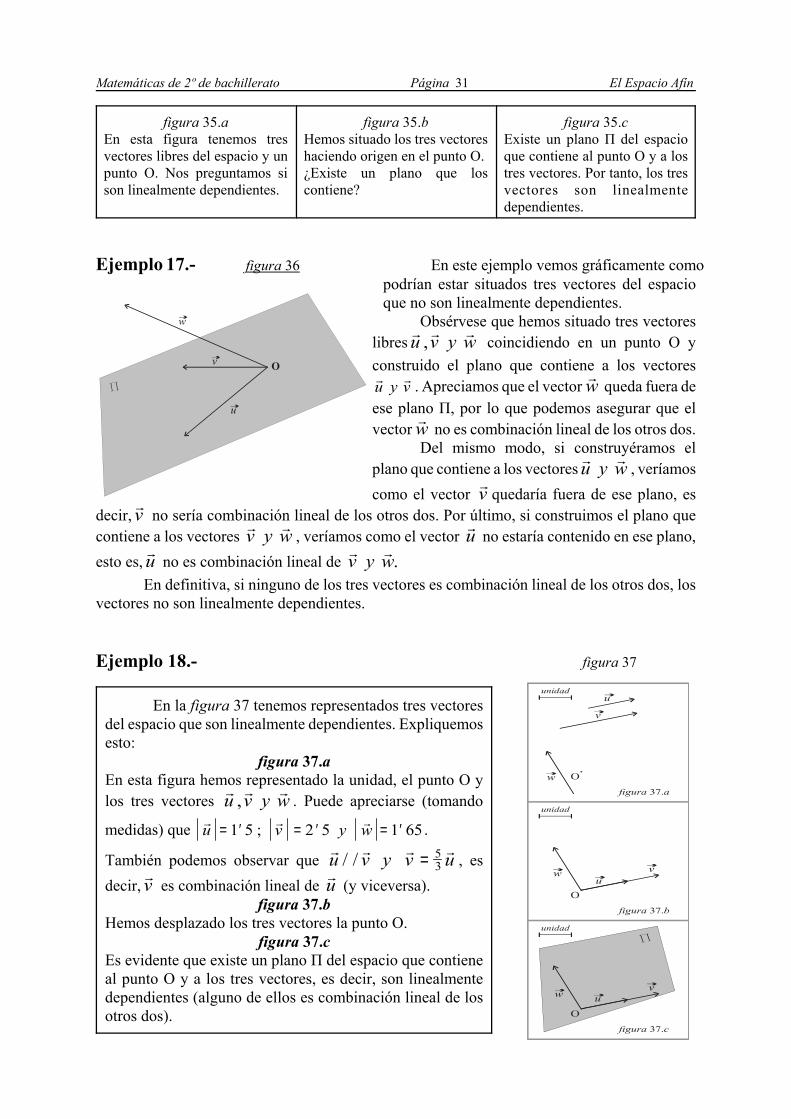
figura 35.aEn esta figura tenemos tresvectores libres del espacio y unpunto O. Nos preguntamos sison linealmente dependientes.
figura 35.bHemos situado los tres vectoreshaciendo origen en el punto O.¿Existe un plano que loscontiene?
figura 35.cExiste un plano Π del espacioque contiene al punto O y a lostres vectores. Por tanto, los tresvectores son linealmentedependientes.
Ejemplo 17.- figura 36 En este ejemplo vemos gráficamente comopodrían estar situados tres vectores del espacioque no son linealmente dependientes.
Obsérvese que hemos situado tres vectoreslibres coincidiendo en un punto O y
r r ru v y w,construido el plano que contiene a los vectores
. Apreciamos que el vector queda fuera der ru y vrw
ese plano Π, por lo que podemos asegurar que elvector no es combinación lineal de los otros dos.
rwDel mismo modo, si construyéramos el
plano que contiene a los vectores , veríamosr ru y w
como el vector quedaría fuera de ese plano, esrv
decir, no sería combinación lineal de los otros dos. Por último, si construimos el plano querv
contiene a los vectores , veríamos como el vector no estaría contenido en ese plano,r rv y w ru
esto es, no es combinación lineal de ru r rv y w.En definitiva, si ninguno de los tres vectores es combinación lineal de los otros dos, los
vectores no son linealmente dependientes.
Ejemplo 18.- figura 37
En la figura 37 tenemos representados tres vectoresdel espacio que son linealmente dependientes. Expliquemosesto:
figura 37.aEn esta figura hemos representado la unidad, el punto O ylos tres vectores . Puede apreciarse (tomando
r r ru v y w,medidas) que .r r ru v y w= ′ = ′ = ′1 5 2 5 1 65;
También podemos observar que , esr r r ru v y v u/ / = 5
3
decir, es combinación lineal de (y viceversa).rv ru
figura 37.bHemos desplazado los tres vectores la punto O.
figura 37.cEs evidente que existe un plano Π del espacio que contieneal punto O y a los tres vectores, es decir, son linealmentedependientes (alguno de ellos es combinación lineal de losotros dos).

Matemáticas de 2º de bachillerato Página 32 El Espacio Afín
Ejemplo 19.-Consideremos nuevamente los tres vectores del ejemplo anterior (ejemplo 18). Nos
hacemos la siguiente pregunta: ¿Es posible expresar cualquiera de ellos como combinación linealde los otros dos?
Veamos:, Con los datos del ejemplo anterior, es fácilmente apreciable que , es
r r ru v w= +35 0
decir, el vector es combinación lineal de los vectores ru r rv y w.
, También podemos poner que , esto es, el vector es combinación linealr r rv u w= +5
3 0 rvde los vectores
r ru y w., Sin embargo, el vector no puede expresarse de la forma , es decir, elrw
r r rw u v= +α βvector no es combinación lineal de los otros dos.rwPara comprender esto, debe apreciarse que cualquier vector y cualquier otro α ru β rvtienen la misma dirección (que es distinta de la de ), por lo que es imposible que la
rwsuma sea igual a .α βr ru v+ rw
21.Vectores libres del espacio linealmente independientes.-
- Sean dos vectores libres del espacio, es decir, .r ru y v r ru v, ∈ V ( R)3
Matemáticamente:
Por tanto, si existen dos números α y β (alguno de ellos distinto de cero) tales que severificase que , los vectores no serían linealmente independientes (seríanα βr r ru v o+ =linealmente dependientes).
- De las definiciones de dependencia e independencia lineal de dos vectores libres, sededuce que:
- Deducimos que si dos vectores son linealmente independientes, entonces ninguno deellos es combinación lineal del otro, ya que entonces serían linealmente dependientes.
“Se dice que son linealmente independientes, si al expresarlos de lar ru y v
forma , debe ser necesariamente α = β = 0"α βr r ru v o+ =
{r r r r ru y v son linealmente independientes u v o⇔ /∃ ∈ + =
≠
α β α β,alguno
R0
r r r ru y v son linealmenteindependientes
u y v no son linealmentedependientes
⇔

Matemáticas de 2º de bachillerato Página 33 El Espacio Afín
- La interpretación gráfica de “dos vectores libres linealmente independientes” es:
Visualmente se apreciaría al observar que sus direcciones son rectas no paralelas. Otraforma es que si situamos ambos vectores haciéndoles coincidir sus orígenes en un mismopunto O, únicamente existe un plano del espacio que contiene a ese punto y a losvectores. Veamos:
figura 38figura 38.aTenemos dos vectoreslibres y un punto del
r ru v,espacio, O.
figura 38.b Hemos situado los vectoresen el punto O y observamosque este punto y los vectoresdeterminan un único plano. son linealmente independientesr ru y v
' Sean tres vectores libres del espacio, es decir, .r r ru v y w, r r ru v w, , ( )∈ V R3
Matemáticamente:
Por tanto, si existen tres números α , β y γ (alguno de ellos distinto de cero) tales que severificase que , los vectores no serían linealmente independientesα β γr r r ru v w o+ + =(serían linealmente dependientes).
' De las definiciones de dependencia e independencia lineal de dos vectores libres, sededuce que:
“Se dice que son linealmente independientes, si al expresarlos de lar r ru v y w,
forma , debe ser necesariamente α = β = γ = 0"α β γr r r ru v w o+ + =
r r r124 34
r r r ru v y w son linealmente independientes u v w oa uno
, , ,lg
⇔ /∃ ∈ + + =≠
α β γ α β γ0
R
r r r r r ru v y w son linealmenteindependientes
u v y w no son linealmentedependientes
, ,
⇔
Dos vectores libres del espacio son linealmente independientessí y sólo sí tienen direcciones distintas.
Matemáticas de 2º de bachillerato Página 34 El Espacio Afín
' Si tres vectores son linealmente independientes, entonces ninguno de ellos escombinación lineal de los otros dos.
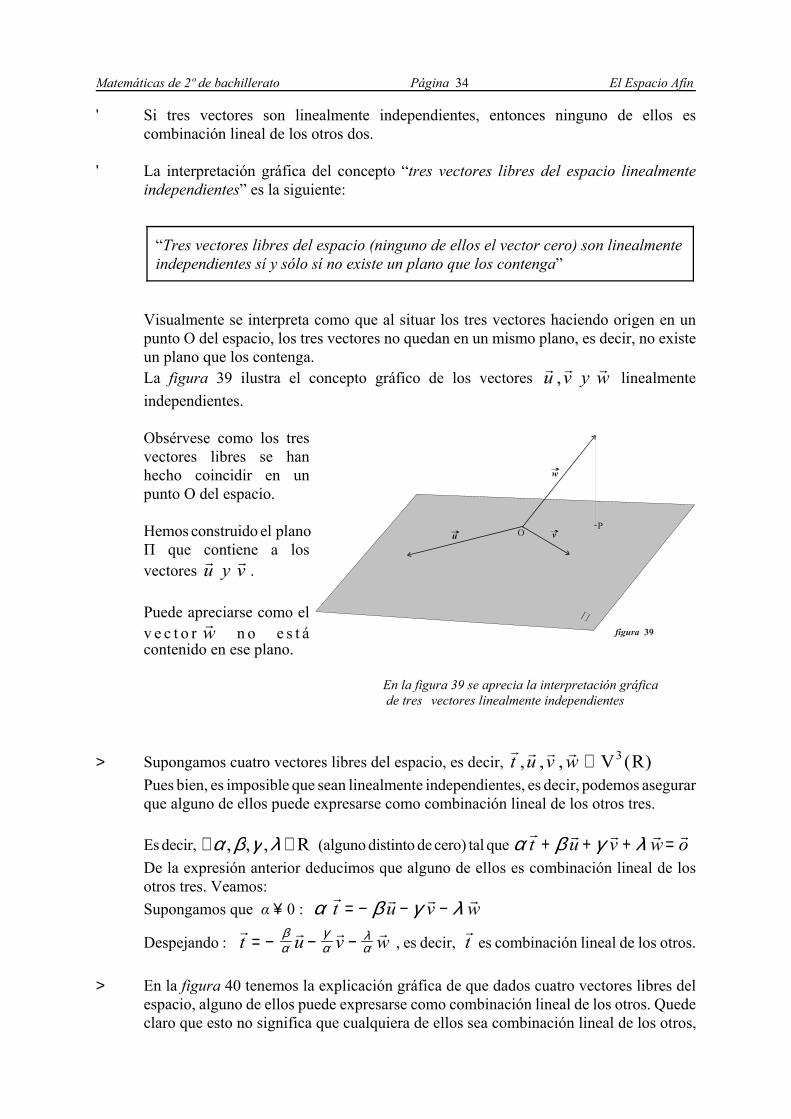
' La interpretación gráfica del concepto “tres vectores libres del espacio linealmenteindependientes” es la siguiente:
Visualmente se interpreta como que al situar los tres vectores haciendo origen en unpunto O del espacio, los tres vectores no quedan en un mismo plano, es decir, no existeun plano que los contenga.La figura 39 ilustra el concepto gráfico de los vectores linealmente
r r ru v y w,independientes.
Obsérvese como los tresvectores libres se hanhecho coincidir en unpunto O del espacio.
Hemos construido el planoΠ que contiene a losvectores .
r ru y v
Puede apreciarse como elv e c t o r n o e s t á
rwcontenido en ese plano.
En la figura 39 se aprecia la interpretación gráfica de tres vectores linealmente independientes
> Supongamos cuatro vectores libres del espacio, es decir, r r r rt u v w, , , ( )∈ V R3
Pues bien, es imposible que sean linealmente independientes, es decir, podemos asegurarque alguno de ellos puede expresarse como combinación lineal de los otros tres.
Es decir, (alguno distinto de cero) tal que ∃ ∈α β γ λ, , , R α β γ λr r r r rt u v w o+ + + =
De la expresión anterior deducimos que alguno de ellos es combinación lineal de losotros tres. Veamos:Supongamos que α … 0 : α β γ λ
r r r rt u v w= − − −
Despejando : , es decir, es combinación lineal de los otros.r r r rt u v w= − − −β
αγα
λα
rt
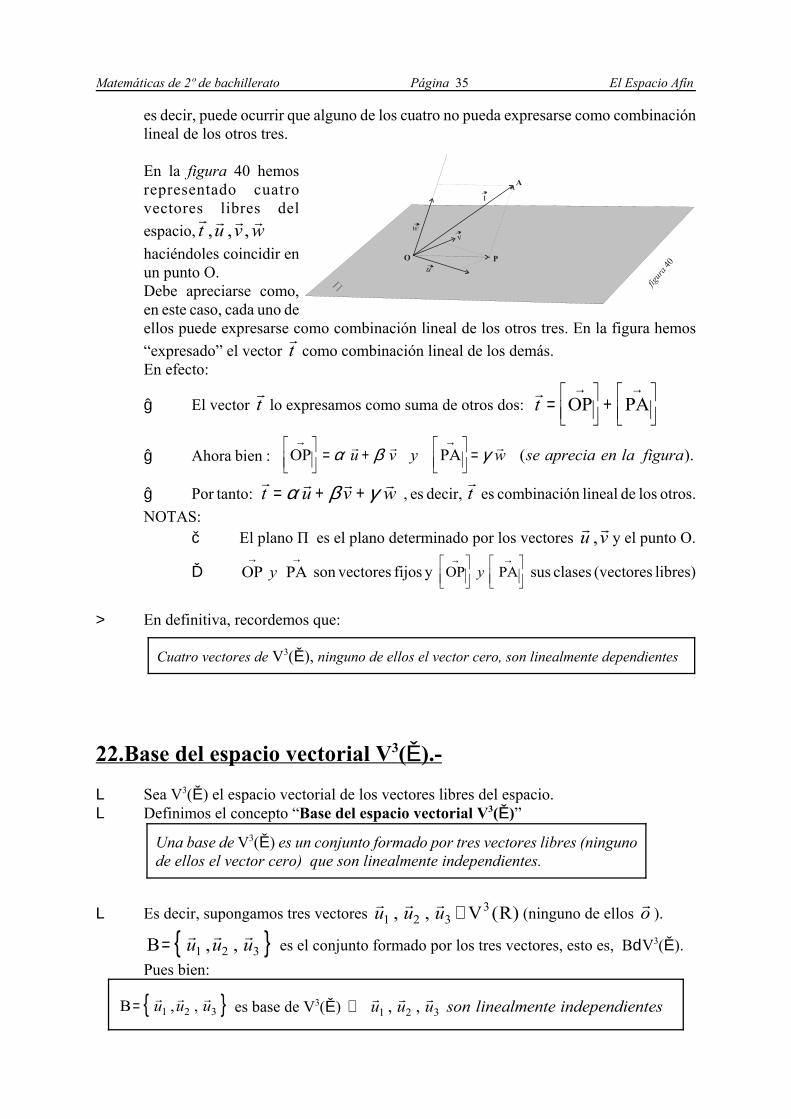
> En la figura 40 tenemos la explicación gráfica de que dados cuatro vectores libres delespacio, alguno de ellos puede expresarse como combinación lineal de los otros. Quedeclaro que esto no significa que cualquiera de ellos sea combinación lineal de los otros,
“Tres vectores libres del espacio (ninguno de ellos el vector cero) son linealmenteindependientes sí y sólo sí no existe un plano que los contenga”
Matemáticas de 2º de bachillerato Página 35 El Espacio Afín
es decir, puede ocurrir que alguno de los cuatro no pueda expresarse como combinaciónlineal de los otros tres.
En la figura 40 hemosrepresentado cuatrovectores libres delespacio,
r r r rt u v w, , ,haciéndoles coincidir enun punto O.Debe apreciarse como,en este caso, cada uno deellos puede expresarse como combinación lineal de los otros tres. En la figura hemos“expresado” el vector como combinación lineal de los demás.
rt
En efecto:
ü El vector lo expresamos como suma de otros dos: rt
rt =
+
→ →OP PA
ü Ahora bien : OP PA→ →
= +
=α β γr r ru v y w se aprecia en la figura( ).
ü Por tanto: , es decir, es combinación lineal de los otros.r r r rt u v w= + +α β γ
rt
NOTAS:ì El plano Π es el plano determinado por los vectores y el punto O.
r ru v,
í son vectores fijos y sus clases (vectores libres)OP PA→ →
y OP PA→ →
y
> En definitiva, recordemos que:
22.Base del espacio vectorial V3(ú).-
L Sea V3(ú) el espacio vectorial de los vectores libres del espacio.L Definimos el concepto “Base del espacio vectorial V3(ú)”
L Es decir, supongamos tres vectores (ninguno de ellos ).r r ru u u1 2 3
3, , ( )∈ V R ro
es el conjunto formado por los tres vectores, esto es, BdV3(ú).{ }B= r r ru u u1 2 3, ,Pues bien:
Cuatro vectores de V3(ú), ninguno de ellos el vector cero, son linealmente dependientes
Una base de V3(ú) es un conjunto formado por tres vectores libres (ningunode ellos el vector cero) que son linealmente independientes.
es base de V3(ú) { }B= r r ru u u1 2 3, , ⇔ r r ru u u son linealmente independientes1 2 3, ,

Matemáticas de 2º de bachillerato Página 36 El Espacio Afín
L La interpretación gráfica de una base del espacio vectorial V3(ú) es que “no existe unplano del espacio que contenga a los tres vectores”. Es decir:
La anterior significa que si hacemos coincidir los tres vectores de la base en un mismoorigen O, no existe un plano que contenga al punto O y a los tres vectores.Es decir:
En la figura 41 se puede apreciar comohemos hecho coincidir los tres vectores enun punto O del espacio, siendo posibleconstruir un plano que contenga a esepunto y dos de los tres vectores, quedandoel tercero fuera de ese plano.
En este caso, el plano Π contiene a losvectores , quedando el vector
r ru y u1 2 fuera de ese plano.
ru3
Por tanto, es una base{ }B= r r ru u u1 2 3, ,del espacio vectorial V3(ú).
Es evidente que en el espacio vectorial V3(ú) existen infinitas bases.
23.Propiedad de las bases del espacio vectorial V3(ú).-
‘ Sea V3(ú) el espacio vectorial de los vectores libres del espacio.
‘ Sea una base cualquiera de V3(ú), es decir, son{ }B= r r ru u u1 2 3, ,r r ru u y u1 2 3,
linealmente independientes (no existe un plano que los contenga).‘ Sea un vector cualquiera de V3(ú), es decir, .
ra ra ∈ V R3 ( )
¡Pues bien!
Expresemos esta importante propiedad matemáticamente:
es decir, cualquier vector de V3(ú) puede expresarse como combinación lineal de la base B.
El vector puede expresarse como combinación lineal de los vectores de Bra
{ }Si B u u u es base dea
a u u u= ⇒
∀ ∈ ∃ ∈= + +
r r rr
r r r r1 2 33
3
1 2 3, , ( )
( ) , , ,V R
V R Rtal que
α β γα β γ
es base de V3(ú) { }B= r r ru u u1 2 3, , ⇔
No existe un plano del espacio quecontenga a los tres vectores u u y ur r r
1 2 3,

Matemáticas de 2º de bachillerato Página 37 El Espacio Afín
‘ Destaquemos de lo anterior lo siguiente:
“Los vectores son linealmente independientes (forman base)”.r r ru u y u1 2 3,
“Los vectores son linealmente dependientes (uno de ellos esr r r ru u u y a1 2 3, ,
combinación lineal de los otros tres)”.
‘ Veamos gráficamente esta propiedad con un ejemplo.
Ejemplo 20.-En este ejemplo tenemos (figura 42)
una base de V3(ú) y otro { }B = r r ru u u1 2 3, ,
vector libre , que hemos hecho coincidir enra
un punto O.Obsérvese que hemos dibujado el
plano que forman el punto O y los vectores, quedando fuera de ese plano.
r ru y u1 2ru3
En la figura puede apreciarse que el vector está expresado como combinación linealrade los vectores de la base B, en concreto:
r r r ra u u u= + + ′3 2 2 421 2 3
Puede apreciarse también que, en este caso, el conjunto también es{ }C = r r ru u a1 2, ,una base del espacio vectorial V3(ú) ya que los vectores son linealmente
r r ru u y a1 2,independientes.
También son bases los conjuntos y .{ }D = r r ru u a1 3, , { }F = r r ru u a2 3, ,
Hemos visto que dada una base ,cualquier vector de V3(ú) puede{ }B = r r ru u u1 2 3, ,expresarse como combinación lineal de los vectores de ella. Esto incluye a los propios vectoresde B (que también son vectores de V3(ú) ). En efecto, es evidente que:
r r r r
r r r r
r r r r
u u u uu u u uu u u u
1 1 2 3
2 1 2 3
3 1 2 3
1 0 00 1 00 0 1
= + += + += + +
Si es una base de V3(ú) y es un vector libre tal que su expresión{ }B = r r ru u u1 2 3, , racomo combinación lineal de B es con α …0 y/o β … 0,
r r r r r ra u u u u u= + + = +α β α β1 2 3 1 20podemos asegurar que está contenido en un mismo plano que contiene a .
ra r ru y u1 2
Si fuese con α …0 , aseguramos que tiene la mismar r r r ra u u u u= + + =α α1 2 3 10 0 ra
dirección (es paralelo) que . Si α > 0, tiene la misma dirección y si α < 0, los vectores y ru1
ra ru1tienen sentidos contrarios.

Matemáticas de 2º de bachillerato Página 38 El Espacio Afín
Supongamos ahora que tenemos dos bases del espacio vectorial V3(ú) :
{ }{ }
U
V
=
=
r r r
r r ru u u es una base
v v v es otrabase1 2 3
1 2 3
, , .
, , .Los vectores de cualquiera de ellas podemos expresarlos como combinación lineal de losvectores de la otra base. En el caso de expresar U como combinación lineal de V será:r r r r
r r r r
r r r r
u v v vu v v vu v v v
1 11 1 12 2 13 3
2 21 1 22 2 23 3
3 31 1 32 2 33 3
= + += + += + +
α α αα α αα α α
expresion que nos da los vectores de Ucomo combinacion lineal de los de V.
&
&
Las igualdades anteriores pueden ponerse de una “forma matricial” :
r
r
r
r
r
r
uuu
vvv
o tambien1
2
3
11 12 13
21 21 22
31 32 33
1
2
3
=
= ⋅α α αα α αα α α
& U A V
quedando claro que en este caso llamamos:
U V=
=
r
r
r
r
r
r
uuu
yvvv
1
2
3
1
2
3Si queremos expresar los vectores de V como combinación lineal de los de U, sólotenemos que hallar la matriz inversa de A. Veamos:
U A V V
A A A V= I V = V V= A U
= ⋅ →
⋅ = ⋅ ⋅ ⋅ ⇒ ⋅− − −
Tenemos que despejar la matriz
U1 1 1
obteniendo así:r
r
r
r
r
r
vvv
uuu
es decir1
2
3
11 12 13
21 21 22
31 32 33
1
2
3
1
=
= ⋅−β β ββ β ββ β β
, V A U
Ejemplo 21.-Supongamos que son dos bases del espacio{ } { }U V= =r r r r r ru u u y v v v1 2 3 1 2 3, , , ,
vectorial V3(ú), de tal modo que la relación entre ellas viene dada por la combinación lineal delos vectores de la base U respecto de la V siguiente:
r
r
r
r
r
r
uuu
vvv
abreviadamente1
2
3
1
2
3
1 2 20 3 22 1 5
=−
−
= ⋅, U A V
Queremos expresar los vectores de V como combinación lineal de las de U.
Veamos:Según vimos, la relación buscada se obtiene de la forma V A U= ⋅−1
Debemos hallar la matriz inversa de A (ver tema “Matrices y Determinantes”).

Matemáticas de 2º de bachillerato Página 39 El Espacio Afín
A
A A A
A A A
A A A
=−
− = + − + =
=−
= = −−
= − = = −
= −−
= = = = −−
= −
=−
−= − = −
−= =
−=
1 2 20 3 22 1 5
15 8 12 2 13
3 21 5
170 22 5
40 32 1
6
2 21 5
121 22 5
11 22 1
5
2 23 2 2
1 20 2 2
1 20 3 3
11 12 13
21 22 23
31 32 33
; ;
; ;
; ;
La matriz inversa de A es:
A
AA
AA
AA
AA
AA
AA
AA
AA
AA
−
−
−
− −=
=
= ⋅−
−− −
1
1713
1213
213
413
113
213
613
513
313
11 21 31
12 22 32
13 23 33
113
17 12 24 1 26 5 3
La relación buscada:r
r
r
r
r
r
r r r r
r r r r
r r r r
vvv
uuu
v u u u
v u u u
v u u u
1
2
3
1713
1213
213
413
113
213
613
513
313
1
2
3
11713 1
1213 2
213 3
2413 1
113 2
213 3
36
13 15
13 23
13 3
=
⇒
= + −
= − + +
= − − +
−
−
− −
24.Componentes de un vector de V3(ú) respecto de una base.-
P Sea V3(ú) el espacio vectorial de los vectores libres del espacio.
P Sea una base de V3(ú).{ }B = r r ru u u1 2 3, ,
P Sea un vector cualquiera de V3(ú), es decir, .ra ra ∈ V R3( )
P Por la propiedad anterior, podemos asegurar que α, β, γ 0ú tales que :r r r ra u u u= + +α β γ1 2 3
¡Pues bien!
Los números α, β, γ se llaman componentes del vector respecto de la base ra { }B = r r ru u u1 2 3, ,
Considerando lo anterior, el vector puede identificarse mediante sus componentes, siemprera
que se indique la base, del siguiente modo:
{ }r r r ra respecto de la base B u u u= =( , , ) , ,α β γ 1 2 3
expresión que equivale a r r r ra u u u= + +α β γ1 2 3
Observa el detalle siguiente: (α , β , γ ) 0ú3 , es decir, es un elemento del espacio vectorial ú3(ú).

Matemáticas de 2º de bachillerato Página 40 El Espacio Afín
Según lo anterior, un mismo vector libre tiene distintas componentes para cada una delas distintas bases (infinitas), es decir:
Si { } { } { }B B B1 1 2 3 2 1 2 3 3 1 2 3= = =r r r r r r r r rKKu u u v v v w w w, , , , , , , , ,
son bases del espacio vectorial V3(ú) y es un vector libre cualquiera, entonces:ra
r
r
r
LLLLLLLLLLLLLLLLL
r
a x y z respecto de la basea x y z respecto de la basea x y z respecto de la base
cuerdese que el vector a es el mismo
===
( , , )( , , )( , , )
Re & .
1 1 1 1
2 2 2 2
3 3 3 3
BBB
Quede claro que cuando se identifica a un vector libre del espacio mediantes suscomponentes, hay que indicar la base.
Ejemplo 22.-Si es una base del espacio vectorial V3(ú), los vectores de esa base{ }B = r r ru u u1 2 3, ,
también pueden expresarse por medio de las componentes de dicha base, es decir:r
r
r
uuu
Son las componentes de los vectoresde B respecto de la propia base B
1
2
2
1 0 00 1 00 0 1
===
( , , )( , , )( , , )
.
Ejemplo 23.- Supongamos las bases y del espacio vectorial V3(ú).{ }B = r r ru u u1 2 3, , { }D = r r rv v v1 2 3, , Sea el vector respecto de la base B.
ra = −( , , )1 3 5 Sea la relación entre los vectores de B y D siguiente:
r r r r
r r r r
r r r
u v v vu v v vu v v
1 1 2 3
2 1 2 3
3 1 2
23
2 3
= − += + −= − −
Queremos expresar el vector en función de la base D.ra
Veamos:3 Utilizando una forma matricial, podemos poner:
( ) ( ) ( ) ( ) ( )r
r
r
r
r
r
r
r
r
r
r r rauuu
vvv
vvv
v v v= −
= −−
−− −
= − −
= − − +1 3 5 1 3 52 1 11 1 32 3 0
11 19 10 11 19 101
2
3
1
2
3
1
2
3
1 2 3
En definitiva: es el vector en función de la base D.r r r ra v v v= − − +11 19 101 2 3
ra3 Resumiendo:
rarespecto de B
respecto de D=
−− −
( , , )( , , ) .1 3 5
11 19 10

Matemáticas de 2º de bachillerato Página 41 El Espacio Afín
25.Ángulo formado por dos vectores libres del espacio.-
º Sean dos vectores (distintos de ) libres del espacio, es decir, r ru y v ro r ru v, ( )∈ V R3
º Sea O un punto del espacio.º Supongamos que desplazamos ambos vectores hasta hacerlos coincidir en el punto O.º Es evidente que el punto O y los vectores (sus direcciones) determinan un plano.
r ru y vDefinimos:
”Ángulo que forma , al ángulo tomado desde en sentido positivo,r ru con vr ru hasta v
es decir, en sentido contrario al movimiento de las agujas de un reloj”.
Se expresa: ángulo que forma ( , )r ru v∧
= =α r ru con v
”Ángulo que forma , al ángulo tomado desde en sentido positivo,r rv con ur rv hasta u
es decir, en sentido contrario al movimiento de las agujas de un reloj”.
Se expresa: ángulo que forma ( , )r rv u∧
= =β r rv con uGráficamente:
En la figura 43 apreciamos los dosvectores que han sido
r ru y vtrasladados al punto O (el punto y losvectores están en un mismo plano).Posteriormente hemos señalado losvectores α y β, indicando sus sentidospositivos mediante una flecha.
Obsérvese que:
Ángulo que se forma cuando el vector gira hacia el siguiendo( , )r ru v∧
= =α ru rvel movimiento contrario a las agujas de un reloj.
Ángulo que se forma cuando el vector gira hacia el siguiendo( , )r rv u∧
= =β rv ruel movimiento contrario a las agujas de un reloj.
Nótese que se verifica que ( , ) ( , )r r r r ou v v u∧ ∧
+ = + =α β 360
Ejemplo 24.-En la figura 44 tenemos dos vectoressituados en un mismo punto O.
r ru y vCon un trasportador de ángulo
podemos tomar medidas y apreciar losiguiente:
( , ) ; ( , )r r r ro ou v v u∧ ∧
= = = =30 330611
6π π
Π es el plano que forman O y los vectores.

Matemáticas de 2º de bachillerato Página 42 El Espacio Afín
Ejemplo 25.-Consideremos una base del espacio vectorial V3(ú). En este ejemplo{ }B= r r ru v w, ,
representamos los vectores en un mismo origen O, así como los ángulos que forman cada dosvectores de dicha base.
figura 45
( , ) ; ( , ) º
( , ) ; ( , ) º
( , ) ; ( , ) º
r r r r
r r r r
r r r r
u v v u
v w v w
w u u w
∧ ∧
∧ ∧
∧ ∧
= = −
= = −
= = −
α α
β β
γ γ
360
360
360
En la figura 45 hemos representado losvectores de la base B. La zonasombreada corresponde a una porcióndel plano donde se encuentran losvectores . El vector está
r ru y v rwsituado fuera de ese plano.
Si dos vectores forman un ángulo de 90º (o 270º), es decir, sus direcciones sonperpendiculares, se dice que son ortogonales. Veamos como se expresa:
( , ) º ( , ) ºr r r r r r r ru v v u u v v u∧ ∧
= ⇔ = ⇔ ⊥ ⇔ ⊥90 270
26.Base canónica en el espacio vectorial V3(ú).-
“Se llama base canónica del espaciovectorial V3(ú) a aquella base formada portres vectores de módulo unidad yperpendiculares entre sí”.
En la figura 46 hemos representado una
base canónica . Nótese que{ }B i j k=r r r
, ,hemos llamado X, Y, Z a sus rectasdirecciones y que los ángulos que formanentre sí son rectos.
En la figura hemos representado la unidadu.Obsérvese que los vectores tiene el tamañode la unidad u, aunque gráficamente
aparece con una longitud inferior debidori
a la deformación de la perspectiva en que se dibuja la dirección X.

Matemáticas de 2º de bachillerato Página 43 El Espacio Afín
{ }B= ⇔= = =
⊥ ⊥ ⊥
r r rr r r
r r r r r ri j k es base canonicai j k
i j i k j k, , &
; ;
1
Definimos que es una base canónica del siguiente modo:{ }B i j k=r r r
, ,
Como en cualquier base, los vectores de la base canónica pueden expresarse en funciónde ella misma. En este caso:
{ }r
r
r
r r rij
k
respecto de labase canonica i j k==
=
=( , , )( , , )
( , , )
& , ,1 0 00 1 0
0 0 1
B
Ejemplo 26.-En este ejemplo expresamos
gráficamente un vector comoru
combinación lineal de los vectores de la base
canónica .{ }B =r r ri j k, ,
En la figura 47 tenemos los vectoresde la base y el vector situados en el mismo
rupunto O.
Hemos señalado las rectasdirecciones de los vectores de la base con lasletras X, Y, Z. También hemos señalado launidad u y graduado las direcciones.
Apréciese que en la figura aparecenlas unidades de la recta X con un tamañoinferior debido a la deformación que producela perspectiva, es decir, la recta X esperpendicular al plano que forman las rectasY,Z.
En la figura puede apreciarse que: r r r r ru i j k es decir u respecto de= − + + = −2 3 2 2 3 2, , ( , , ) B
La base canónica es la se suele usar más habitualmente para representar vectores delespacio vectorial V3(ú), por su sencillez.
27.Isomorfismo entre los espacios vectoriales ú3(ú) y V3(ú).-
/ Recuerda el conjunto ú3, es decir : ú3 = { (x, y, z ) * x 0ú, y 0ú, z 0ú } / Consideremos el espacio vectorial ú3(ú) (ver tema “El espacio vectorial ú3(ú)” )/ Consideremos el espacio vectorial de los vectores libres del espacio, es decir, V3(ú).

Matemáticas de 2º de bachillerato Página 44 El Espacio Afín
Vamos a establecer una correspondencia entre el espacio vectorial ú3(ú) y el, tambiénespacio vectorial V3(ú), de tal modo que a cada elemento (x, y, z )0 ú3 le va a corresponder unúnico elemento 0V3(ú) y viceversa.
rvVeamos como:
& Consideremos una base cualquiera del espacio vectorial V3(ú): { }B = r r ru u u1 2 3, ,& Sea un vector cualquiera de V3(ú), es decir, 0V3(ú).
rv rv& El vector puede expresarse como combinación lineal de los vectores de B, es decir:
rvr r r rv x u y u z u= + +1 2 3
O también : { }r r r rv x y z respecto de la base u u u= =( , , ) , ,B 1 2 3& Ahora bien , es un elemento de ú3, es decir, (x, y, z ) 0 ú3.( , , )x y zPor tanto:
Hacemos corresponder al vector 0V3(ú), el vector (x, y, z ) 0 ú3 (ú).rv
' Consideremos otro vector de V3(ú), es decir, 0V3(ú).rw rw
' También podemos expresar como combinación lineal de los vectores de B, es decir:rw
r r r rw x u y u z u= + +, , ,1 2 3
O también : { }r r r rw x y z respecto de la base u u u= =( , , ) , ,, , , B 1 2 3Por tanto:
Hacemos corresponder al vector 0V3(ú), el vector (x´, y´, z´ ) 0 ú3 (ú).rw
Pues bien:Por este procedimiento, a cualquier vector de V3(ú) le hacemos corresponder un vector
(x, y, z ) 0 ú3 (ú), es decir, sus componentes respecto de la base B. Es decir:
∀ ∈ ∈rv le corresponde un unico x y zV R R R3 3( ) & ( , , ) ( )
Del mismo modo, si tenemos un vector (x, y, z ) 0 ú3 (ú) cualquiera, le hacemoscorresponder el vector de V3(ú), que es único.
r r r rv x u y u z u= + +1 1 3
Matemáticamente es:
V R R R3 31 2 3
( ) ( )( , , )
f
v x y zsiendo v x u y u z u← →
= + +rr r r r
Nótese que para establecer la correspondencia entre V3(ú) y ú3 (ú) es necesario fijarpreviamente una base B de V3(ú).
Esta correspondencia es una “correspondencia biunívoca”, ya que “a cada lerv
corresponde un único (x, y, z) y, a cada (x, y, z) le corresponde un único “.rv
Matemáticamente se expresa (una función entre V3(ú) y ú3 (ú)), perof v x y z( ) ( , , )r =por comodidad se expresa , esto es, se identifican plenamente los vectores del
rv x y z= ( , , ) rvespacio V3(ú) y (x, y, z) del espacio ú3 (ú), bien entendido que esa igualdad no es en el sentidoestricto, sino más bien del tipo , esto es, como una equivalencia.rv x y z↔ ( , , )

Matemáticas de 2º de bachillerato Página 45 El Espacio Afín
En el caso de los vectores de la propia base B será:r r ru u u1 2 31 0 0 0 1 0 0 0 1= = =( , , ) ; ( , , ) ; ( , , )
; En el caso de que la base fijada fuese otra distinta , la{ }C = r r rv v v1 2 3, ,correspondencia biunívoca entre V3(ú) y ú3 (ú) es distinta de la anterior, es decir, siconsideramos el mismo vector que elegimos en el caso anterior, tendríamos:
rv (recuérdese que es el mismo)
r r r rv x v y v z v x y z= ′ + ′ + ′ = ′ ′ ′ ∈1 2 33( , , ) ( )R R rv
Es decir:
∀ ∈== ′ ′ ′
rr
rv esv x y z si la base es Bv x y z si la base es CV R3( )
( , , )( , , )
, La correspondencia establecida { }V R R R3 31 2 3
( ) ( )( , , )
, ,f
v x y zfijada B u u u← →
=r
r r r
es una aplicación biyectiva, es decir:; Es inyectiva porque a cada 0V3(ú) le corresponde un único (x, y, z) 0 ú3 (ú)
rvEsto significa que a dos vectores distintos de V3(ú) les corresponden dos ternasdistintas de ú3 (ú).
; Es suprayectiva (o sobreyectiva) porque todo (x, y, z) 0 ú3 (ú) es imagen de algún0V3(ú). Esto significa que todas las ternas de ú3 (ú) son el correspondiente
rvde un sólo vector de V3(ú).
, Hemos visto que la aplicación es{ }V R R R3 31 2 3
( ) ( )( , , )
, ,f
v x y zfijada B u u u← →
=r
r r r
una aplicación biyectiva entre los conjuntos V3(ú) y ú3 (ú). Ahora veremos que laaplicación f tiene otras propiedades. Veamos:
Î “La imagen, mediante f, de una suma de vectores de V3(ú) es igual a la suma delas imágenes”.Es decir:
∀ ∈ + = +r r r r r ru v se verifica que f u v f u f v, ( ) , ( ) ( ) ( )V R3
Observa el siguiente detalle:
es decir, se mantiene la suma.{ {f u v f u f v
suma en suma en
( ) ( ) ( )r r r r+ = +↓ ↓
V R3 3
Profundicemos en esta propiedad:
Supongamos la base de V3(ú). Sean tales que:{ }B= r r ru u u1 2 3, , r ru v, ( )∈ V R3
V R R R3 3
1 1 1
2 2 2
( ) ( )( , , )( , , )
← →
rLL
rLL
u x y zv x y z
Matemáticas de 2º de bachillerato Página 46 El Espacio Afín
Veamos que vector de ú3 (ú) le corresponde al vector de V3(ú) :r ru v+
r r r r
r r r rr r r r ru x u y u z u
v x u y u z uu v x x u y y u z z u
= + += + +
⇒ + = + + + + +1 1 1 2 1 3
2 1 2 2 2 31 2 1 1 2 2 1 2 3( ) ( ) ( )
Según lo anterior:
c.q.df u v x x y y z z
x y z x y z f u f v( ) ( , , )
( , , ) ( , , ) ( ) ( )
r r
r r+ = + + + =
= + = +1 2 1 2 1 2
1 1 1 2 2 2Podemos resumir diciendo que:
“La imagen de una suma es igual a la suma de las imágenes”
Ï “La imagen, mediante f, del producto de un número real por un vector libre, esigual al numero por la imagen de ese vector libre”.
Es decir: ∀ ∈
∀ ∈
=
αα α
R
V Rrr r
use verifica que f u f u3( )
( ) ( )
Observa el siguiente detalle:
{f u
es un producto de numero real por vector de Vf u
es el producto de un numero real por un vector de
( )
& ( )( )
( )
α
α
r
r123
↑
↑
3
3
R
R R
Profundicemos en esta propiedad:
Supongamos la base de V3(ú), sean y α 0ú:{ }B= r r ru u u1 2 3, , ru ∈ V R3( )
V R R R3 3( ) ( )( , , )
, ( ) ( , , )f
u x y zes decir f u x y z← →
=r
LLL
r
Consideremos el vector libre α α α α αr r r r r r ru x u y u z u x u y u z u= + + = + +( )1 2 3 1 2 3
Aplicando f al vector tenemos:α ru c.q.d.f u x y z x y z f u( ) ( , , ) ( , , ) ( )α α α α α αr r= = =
Por tanto, la aplicación f mantiene la operación externa de V3(ú) en ú3(ú).
La aplicación f definida de este modo, se dice que es un isomorfismo entre V3(ú) yú3(ú), ya que mantiene las operaciones interna y externa entre ambos espacios vectoriales.
La ventaja que tiene este isomorfismo es que podemos substituir la expresión de unvector de V3(ú) por la forma de ú3(ú), facilitando la
r r r rv x u y u z u= + +1 2 3rv x y z= ( , , )
operatividad entre vectores libres del espacio.

Matemáticas de 2º de bachillerato Página 47 El Espacio Afín
Ejemplo 27.-Consideremos el espacio vectorial V3(ú) y una base cualquiera .{ }B = r r ru u u1 2 3, ,Sean los vectores siguientes:
r r r r
r r r r
r r r r
r r r r
u u u u
v u u u
w u u u
y t u v w
= + −
= + +
= − −
= − +
2 3
3
2
4 4
1 252 3
43 1 2 3
113 2 3
32
Queremos expresar el vector en función de la base .rt { }B = r r ru u u1 2 3, ,
Veamos:— Buscamos una expresión del tipo:
r r r rt x u y u z u= + +1 2 3— Podemos “trabajar en modo V3(ú)” :
r r r r r r r r r r r r r
r r r r r r r r r
r r
t u v w u u u u u u u u u
u u u u u u u u u
u u
= − + = + − − + + + − − =
= + − − − − + − − =
= − + + − − + − − −
4 4 4 2 3 3 4 2
8 12 10 2 4 8
8 2 4 12 10
32 1 2
52 3
32
43 1 2 3 1
13 2 3
1 2 3 132 2
92 3 1
43 2 3
132
43 2
92
( ) ( ) ( )
( ) ( ) ( 8 103 1556 2
452 3) r r r ru u u u= + −
Por tanto:
— Sin embargo, resulta más fácil “trabajar en modo ú3(ú)”.Para ello utilizamos el isomorfismo f visto anteriormente:
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )r r r rt u v w= − + = − − + − − =
= − − + − − = − + − − − − − = −
4 4 4 2 3 1 3 4 1 2
8 12 10 2 4 8 8 2 4 12 10 8 10
32
52
32
43
13
32
92
43
32
43
92
556
452
, , , , , ,
, , , , , , , , , ,
Por tanto:
→
Expresion de ten funcion de B
&
&
r
En el ejemplo anterior puede apreciarse que resulta ligeramente más cómodo trabajar convectores del espacio ú3(ú) que con los vectores libres expresados como combinación lineal deuna base B, sin que ello haga que se pierda la identidad de cada uno de ellos.
r r r rt u u u= + −10 1556 2
452 3 →
Expresion de ten funcion de B
&
&
r
( )r r r rt u u u= − = + −10 10556
452 1
556 2
452 3, ,

Matemáticas de 2º de bachillerato Página 48 El Espacio Afín
28.El Espacio Afín.-
Recordemos algunos de los conjuntos y conceptos tratados en este tema:º Conjunto ú3. El espacio vectorial ú3(ú).º Conjunto de los puntos del espacio, al que hemos llamado E.º Conjunto de los vectores libres del espacio V3. El espacio vectorial V3(ú).º Hemos establecido una correspondencia (que es isomorfismo) entre los espacios
vectoriales V3(ú) y ú3(ú), fijada una base de V3(ú). Es decir:{ }B = r r ru u u1 2 3, ,
V R R R3 31 2 3
( ) ( )( ) ( , , )
f
u f u x y zsiendo u x u y u z u← →
=
= + +r r
r r r r
3 Pues bien, ahora vamos a establecer una correspondencia entre los conjuntos E (puntosdel espacio) y los vectores libres del espacio V3(ú). Veamos como:
, Fijamos un punto cualquiera del espacio, es decir, O 0 E. Ese punto le llamamos origen., Supongamos ahora otro punto cualquiera A, es decir, A 0 E.
, Pues bien, al punto A le hacemos corresponder el vector libre de V3(ú) .ra =
→OA
Es decir:
E
E
f
o
O V R
A f A OA afijado O de
← →
=
=
→
3( )
( ) r
Obsérvese que el subíndice de fO indica el punto fijado O 0 E.
, El vector fijo se denomina “vector de posición” del punto A respecto del puntoOA→
fijado O., Supongamos otro punto cualquiera B 0 E. A este punto le hacemos corresponder el
vector libre , siendo el vector fijo , el vector de posición del punto Brb =
→OB OB
→
respecto de O.
, De este modo, a cada punto P del espacio, le hacemos corresponder el vector ,rp =
→OP
siendo el vector de posición del punto P.OP→
, Es evidente que al propio punto O le corresponde el vector cero, es decir ,ro =
→OO
siendo el vector de posición de O respecto de O el propio punto O., Generalmente, por comodidad, se suele identificar al vector libre con el vector fijo (en
realidad es un representante), es decir, expresaremos cuando creamos conveniente:r ra en lugar de a= =
→ →OA OA
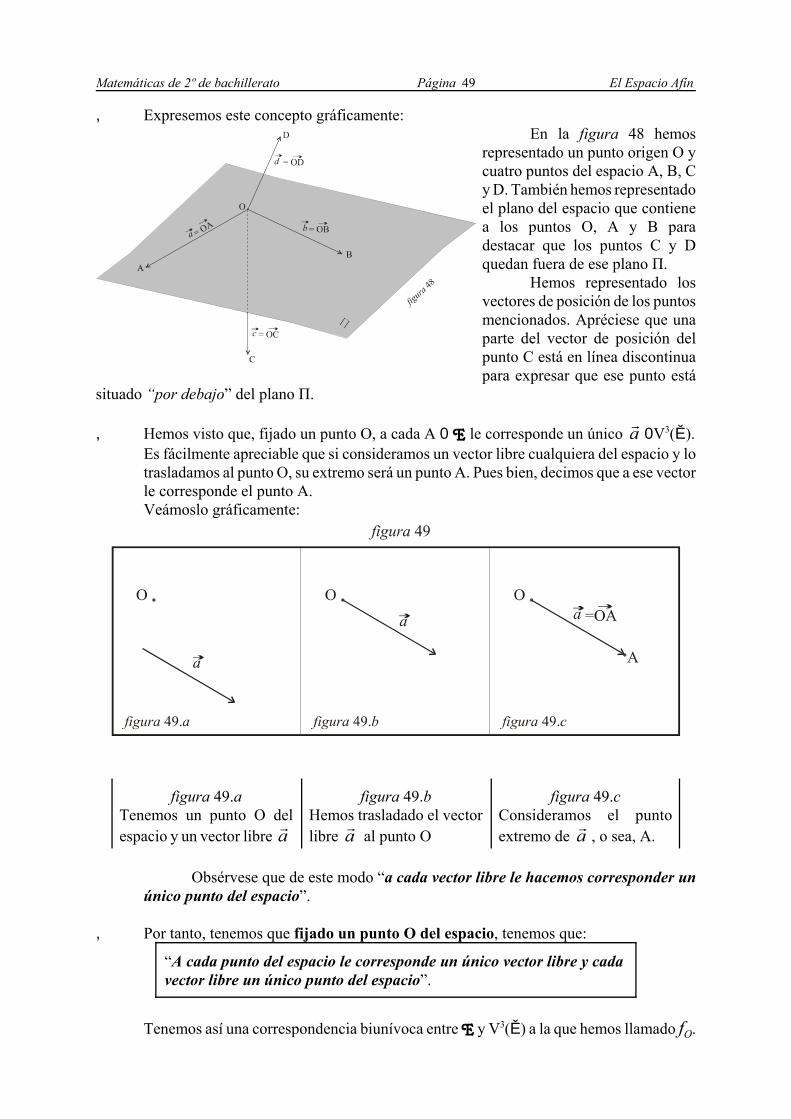
Matemáticas de 2º de bachillerato Página 49 El Espacio Afín
, Expresemos este concepto gráficamente:En la figura 48 hemos
representado un punto origen O ycuatro puntos del espacio A, B, Cy D. También hemos representadoel plano del espacio que contienea los puntos O, A y B paradestacar que los puntos C y Dquedan fuera de ese plano Π.
Hemos representado losvectores de posición de los puntosmencionados. Apréciese que unaparte del vector de posición delpunto C está en línea discontinuapara expresar que ese punto está
situado “por debajo” del plano Π.
, Hemos visto que, fijado un punto O, a cada A 0 E le corresponde un único 0V3(ú).ra
Es fácilmente apreciable que si consideramos un vector libre cualquiera del espacio y lotrasladamos al punto O, su extremo será un punto A. Pues bien, decimos que a ese vectorle corresponde el punto A.Veámoslo gráficamente:
figura 49.aTenemos un punto O delespacio y un vector libre
ra
figura 49.bHemos trasladado el vectorlibre al punto O
ra
figura 49.cConsideramos el puntoextremo de , o sea, A.
ra
Obsérvese que de este modo “a cada vector libre le hacemos corresponder unúnico punto del espacio”.
, Por tanto, tenemos que fijado un punto O del espacio, tenemos que:
Tenemos así una correspondencia biunívoca entre E y V3(ú) a la que hemos llamado fO.
“A cada punto del espacio le corresponde un único vector libre y cadavector libre un único punto del espacio”.

Matemáticas de 2º de bachillerato Página 50 El Espacio Afín
A cada punto un vector y a cada vector un punto.E
f O V R
A a OA
← →
=
→
3( )
LLLr
, Se llama Espacio Afín a la terna formada por E , V3 y fO. Se expresa de la forma (E , V3, fO )Por tanto, el Espacio Afín es “el conjunto de los puntos del espacio”, “el conjunto de losvectores libres del espacio” y “la correspondencia establecida entre ellos (fijado unpunto O)”.
29.Sistema de referencia en el Espacio Afín.-
þ Sea O un punto cualquiera del espacio, es decir, O 0 E.
þ Sea una base del espacio vectorial V3(ú).{ }B= r r ru u u1 2 3, ,
þ Pues bien, se dice que el punto O y la base forman un sistema de{ }B= r r ru u u1 2 3, ,referencia del Espacio Afín.
Se expresa de la forma { }R = O u u u; , ,r r r1 2 3
Por tanto:
Ejemplo 28.- En este ejemplo vamos a representar tres sistemas de referencia distintos, del Espacio Afín.
(E , V3, fO ) ÿ Espacio Afín
Un punto cualquiera del espacio y una base cualquiera del espacio vectorial delos vectores libres del espacio, forma un sistema de referencia del Espacio Afín.
{ }R = O u u u; , ,r r r1 2 3 ö Sistema de referencia del Espacio Afín

Matemáticas de 2º de bachillerato Página 51 El Espacio Afín
{ }R1 = →O i j k; , ,r r r
{ }R2 = →P u v w; , ,r r r
{ }R3 = →Q u v w; , ,r r r
En la figura 50 tenemos representados tres sistemas de referencia del espacio:
30.Coordenadas de un punto del espacio respecto de un sistemade referencia.-
] Sea un sistema de referencia del Espacio Afín. No olvidemos{ }R = O u u u; , ,r r r1 2 3
que O es punto del espacio (O 0 E ) y es una base de V3(ú).{ }B = r r ru u u1 2 3, ,] Sea A otro punto cualquiera del espacio, es decir, A 0 E.
] Según hemos visto, al punto A le corresponde un único vector libre (sira =→
OA
consideramos al punto O como punto origen). El vector fijo es el vector de posiciónOA→
del punto A.] Como cualquier vector libre de V3(ú) se puede expresar como combinación lineal de los
vectores de la base B, en particular, el vector será:ra =→
OAr r r ra a u a u a u= + +1 1 2 2 3 3
] Por el isomorfismo V3 ú3 visto anteriormente, al vector 0V3(ú) le corresponde el↔ ravector 0ú3(ú), es decir, respecto de la base B.( , , )a a a1 2 3
ra a a a= ( , , )1 2 3] Recordemos que se denominaban “componentes del vector respecto de( , , )a a a1 2 3
rala base B”.
En ete caso el punto es O y la base es la base canónica de V3(ú)Los vectores de la base tienen de módulo la unidad (u) y son perpendiculares entre sí. Nótese que le vector parece algo mas
ri
corto debido a la deformación que se produce en la perspectiva.La zona sombreada corresponde a un trozo del plano que formanel punto O y los vectores . El vector está “fuera” de ese
r ri y j
rk
plano
En ete caso el punto es P y la base es una base cualquiera de V3(ú)La zona sombreada corresponde a un trozo del plano que formanel punto P y los vectores . El vector está “fuera” de ese
r ru y v rwplano.
En ete caso el punto es Q y la base es la misma del sistema dereferencia R3.La zona sombreada corresponde a un trozo del plano que formanel punto P y los vectores . El vector está “fuera” de ese
r ru y v rwplano.

Matemáticas de 2º de bachillerato Página 52 El Espacio Afín
] ¡Pues bien! También se dice que son las “coordenadas del punto A( , , )a a a1 2 3
respecto del sistema de referencia “.{ }R = O u u u; , ,r r r1 2 3
] Nótese que en esta ocasión hemos relacionado a tres elementos de tres conjuntosdistintos, es decir:
] Podemos decir que los tres conjuntos E, V3 y ú3 están relacionados entre sí, de modoque cada elemento de uno de ellos se identifica con sendos elementos de los otros dos,sin olvidar que hay fijado un punto O de E y una base B de V3(ú), es decir:
] Expresemos gráficamente esta relación, considerando que tenemos fijado un sistema de
referencia :{ }R = O u u u; , ,r r r1 2 3
En la figura 51 tenemosdibujado un sistema dereferencia R formadopor el punto O y la base
{ }B u u u= r r r1 2 3, ,
A cada vector de la basele corresponde un ejeque indica su dirección.En este caso hemosmarcado los semiejesX1, X2 y X3 que señalanlos sentidos de losvectores de esa base.Hemos representado unpunto A y su vector deposición .
raLos valores a1, a2 y a3 son las componentes del vector respecto de la base B y tambiénralas coordenadas del punto A respecto del sistema de referencia { }R = O u u u; , ,
r r r1 2 3
Es decir: r r r ra a u a u a u A a a a= + + ← →1 1 2 2 3 3 1 2 3( , , )
Siendo
A
a V R
a a a R R
∈
∈
∈
Er 3
1 2 33
( )
( , , ) ( )
Para un sistema de referencia { }R = O u u u; , ,r r r1 2 3
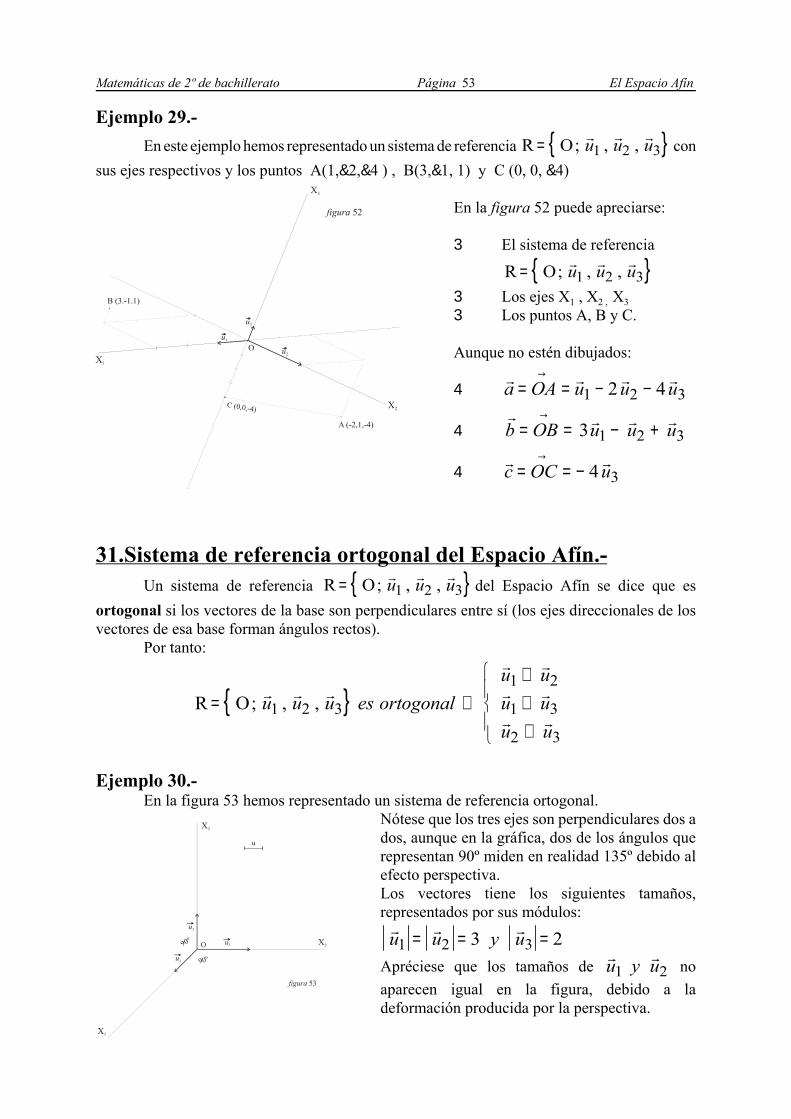
Matemáticas de 2º de bachillerato Página 53 El Espacio Afín
Ejemplo 29.-En este ejemplo hemos representado un sistema de referencia con{ }R O= ; , ,r r ru u u1 2 3
sus ejes respectivos y los puntos A(1,&2,&4 ) , B(3,&1, 1) y C (0, 0, &4)
En la figura 52 puede apreciarse:
3 El sistema de referencia
{ }R O= ; , ,r r ru u u1 2 33 Los ejes X1 , X2 , X3 3 Los puntos A, B y C.
Aunque no estén dibujados:
4r r r ra OA u u u= = − −
→1 2 32 4
4r r r rb OB u u u= = − +
→3 1 2 3
4r rc OC u= = −
→4 3
31.Sistema de referencia ortogonal del Espacio Afín.-Un sistema de referencia del Espacio Afín se dice que es{ }R O= ; , ,r r ru u u1 2 3
ortogonal si los vectores de la base son perpendiculares entre sí (los ejes direccionales de losvectores de esa base forman ángulos rectos).
Por tanto:
{ }R O= ⇔⊥⊥⊥
; , ,r r r
r r
r r
r ru u u es ortogonal
u uu uu u
1 2 3
1 2
1 3
2 3
Ejemplo 30.-En la figura 53 hemos representado un sistema de referencia ortogonal.
Nótese que los tres ejes son perpendiculares dos ados, aunque en la gráfica, dos de los ángulos querepresentan 90º miden en realidad 135º debido alefecto perspectiva.Los vectores tiene los siguientes tamaños,representados por sus módulos:r r ru u y u1 2 33 2= = =
Apréciese que los tamaños de nor ru y u1 2
aparecen igual en la figura, debido a ladeformación producida por la perspectiva.
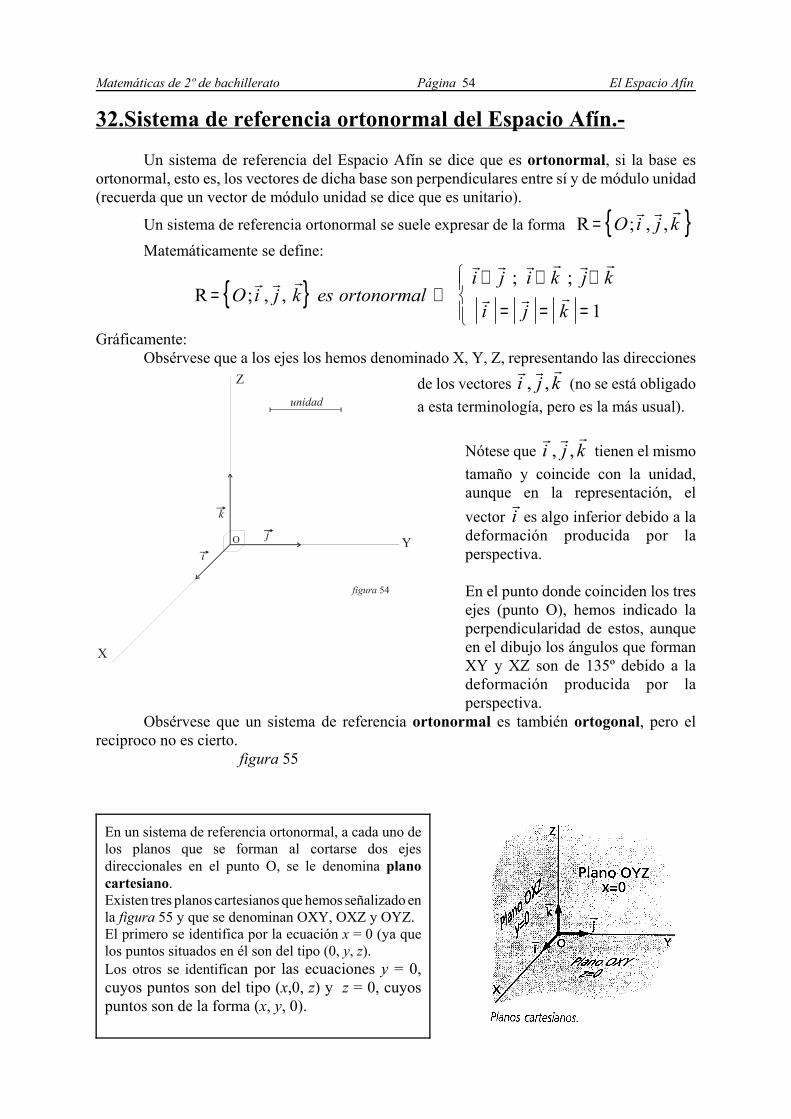
Matemáticas de 2º de bachillerato Página 54 El Espacio Afín
32.Sistema de referencia ortonormal del Espacio Afín.-
Un sistema de referencia del Espacio Afín se dice que es ortonormal, si la base esortonormal, esto es, los vectores de dicha base son perpendiculares entre sí y de módulo unidad(recuerda que un vector de módulo unidad se dice que es unitario).
Un sistema de referencia ortonormal se suele expresar de la forma { }R = O i j k; , ,r r r
Matemáticamente se define:
{ }R = ⇔⊥ ⊥ ⊥
= = =
O i j k es ortonormal
i j i k j k
i j k; , ,
; ;r r rr r r r r r
r r r1
Gráficamente:Obsérvese que a los ejes los hemos denominado X, Y, Z, representando las direcciones
de los vectores (no se está obligador r ri j k, ,
a esta terminología, pero es la más usual).
Nótese que tienen el mismor r ri j k, ,
tamaño y coincide con la unidad,aunque en la representación, elvector es algo inferior debido a la
ri
deformación producida por laperspectiva.
En el punto donde coinciden los tresejes (punto O), hemos indicado laperpendicularidad de estos, aunqueen el dibujo los ángulos que formanXY y XZ son de 135º debido a ladeformación producida por laperspectiva.
Obsérvese que un sistema de referencia ortonormal es también ortogonal, pero elreciproco no es cierto.
figura 55
En un sistema de referencia ortonormal, a cada uno delos planos que se forman al cortarse dos ejesdireccionales en el punto O, se le denomina planocartesiano.Existen tres planos cartesianos que hemos señalizado enla figura 55 y que se denominan OXY, OXZ y OYZ.El primero se identifica por la ecuación x = 0 (ya quelos puntos situados en él son del tipo (0, y, z).Los otros se identifican por las ecuaciones y = 0,cuyos puntos son del tipo (x,0, z) y z = 0, cuyospuntos son de la forma (x, y, 0).

Matemáticas de 2º de bachillerato Página 55 El Espacio Afín
Ejemplo 31.-Consideremos un sistema de referencia ortonormal de origen un punto O y base B.Vamos a representar el sistema de referencia, algún punto del espacio y sus vectores de
posición:
En la figura 56 tenemos:P Ejes direccionales:
XY
Z
es el eje direccional de ies el eje direccional de j
es el eje direccional de k
r
r
r
P Puntos:AB
( , , )( , , )( , , )
2 1 5 1 332 1 5 00 0 1 33
′ ′′
′CP Vectores de posición:r r r r
r r r
r r
a i j k de
b i j de
c k de
= + ′ + ′
= + ′
= ′
2 1 5 1 33
2 1 5
1 33
A
B
C
Nótese lo siguiente:r Los puntos situados en el plano cartesiano OXY tienen la forma P(x, y, 0)r Los puntos situados en el plano cartesiano OXZ tienen la forma P(x,0, y)r Los puntos situados en el plano cartesiano OYZ tienen la forma P(0, y, 0)
s Los puntos situados en el eje X tiene la forma P(x, 0, 0).s Los puntos situados en el eje Y tiene la forma P(0, y, 0).s Los puntos situados en el eje Z tiene la forma P(0, 0, z).
33.Vector definido por dos puntos del espacio.-‘ Sea un sistema de referencia cualquiera del Espacio Afín.{ }R O u u u= ; , ,r r r
1 2 3‘ Sea A(x1 , y1 , z1) un punto cualquiera del espacio, expresado respecto del sistema R.‘ Sea B(x2 , y2 , z2) otro punto cualquiera del espacio, expresado respecto del sistema R.
‘ Consideremos el vector fijo de origen A y extremo B, es decir, .AB→
‘ Consideremos el vector libre determinado por , es decir, aquel que tiene porAB→
representante a este. Recordemos que este vector libre se expresa por , pero porAB→
comodidad lo expresaremos por .AB→
‘ Nos hacemos la siguiente pregunta:¿Cuales son las componentes de respecto de laAB→
base ?{ }B u u u= r r r1 2 3, ,

Matemáticas de 2º de bachillerato Página 56 El Espacio Afín
Veamos:
AB→
= + +x u y u z u Buscamos x y zr r r1 2 3 , ,
Expresemos el “problema” gráficamente:
Vector de posición del punto A(x1 , y1 , z1) : es un vector conocido.r r r ra x u y u z u= + +1 1 1 2 1 3
Vector de posición del punto B(x2 , y2 , z12) : es un vector conocido.r r r rb x u y u z u= + +2 1 2 2 2 3
Observando la gráfica es fácil apreciar que r ra b+ =
→AB
Despejando : AB→
= −r rb a
Operando :
( )
( ) ( ) ( )
AB→
= + + − + + == + + − − − =
= − + − + −
x u y u z u x u y u z ux u y u z u x u y u z u
x x u y y u z z u
2 1 2 2 2 3 1 1 1 2 1 3
2 1 2 2 2 3 1 1 1 2 1 3
2 1 1 2 1 2 2 1 3
r r r r r r
r r r r r r
r r r
Es decir:
NOTA: Recordemos que, en realidad, lo que hemos hallado es el vector libre , pero porAB→
comodidad expresamos en lugar de .AB→
AB→
( ) ( ) ( )AB→
= − + − + −x x u y y u z z u2 1 1 2 1 2 2 1 3r r r

Matemáticas de 2º de bachillerato Página 57 El Espacio Afín
Si queremos hallar el vector , lo podemos hacer de una de las siguientes formas:BA→
Î ( ) ( ) ( )BA→
= − = − + − + −r r r r ra b x x u y y u z z u1 2 1 1 2 2 1 2 3
Ï ( ) ( ) ( )[ ]( ) ( ) ( )
( ) ( ) ( )
BA AB → →
= − = − − + − + − =
= − − − − − − =
= − + − + −
x x u y y u z z u
x x u y y u z z u
x x u y y u z z u
2 1 1 2 1 2 2 1 3
2 1 1 2 1 2 2 1 3
1 2 1 1 2 2 1 2 3
r r r
r r r
r r r
Ejemplo 32.-Consideremos un sistema de referencia ortonormal .{ }R = O i j k; , ,
r r r
Consideremos los puntos A(2, 0, 2´165) y B(0, 2, -1)
Queremos hallar el vector libre que tenga como representante al vector fijo .AB→
Veamos:Vamos a expresar el sistema de referencia, los puntos A y B con sus vectores de posición,
así como el vector buscado:
De la simple observación de la figura
deducimos que r ra b+ =
→AB
Despejando : AB →
= −r rb a
Por tanto : ( )AB →
= − = − − + ′ = − + − ′r r r r r r r r rb a j k i k i j k2 2 2 165 2 2 3 165
A(2, 0, 2´165) y B(0, 2, -1) puntosr r r
r r ra i k vector posicionde A
b j k vector posicionde B
= + ′
= −
2 2 165
2
&
&
AB→
= + +x i y j z kr r r
Buscamos el vector AB →
Obsérvese que el punto A estásituado en el plano OXZObsérvese que el punto B estásituado en el plano OYZ
Obsérvese que el vector AB →
“atraviesa” el plano OXY
Debe apreciarse, a simple vista,que los valores buscados x, y, zson: x<0 ; y>0 ; z<0
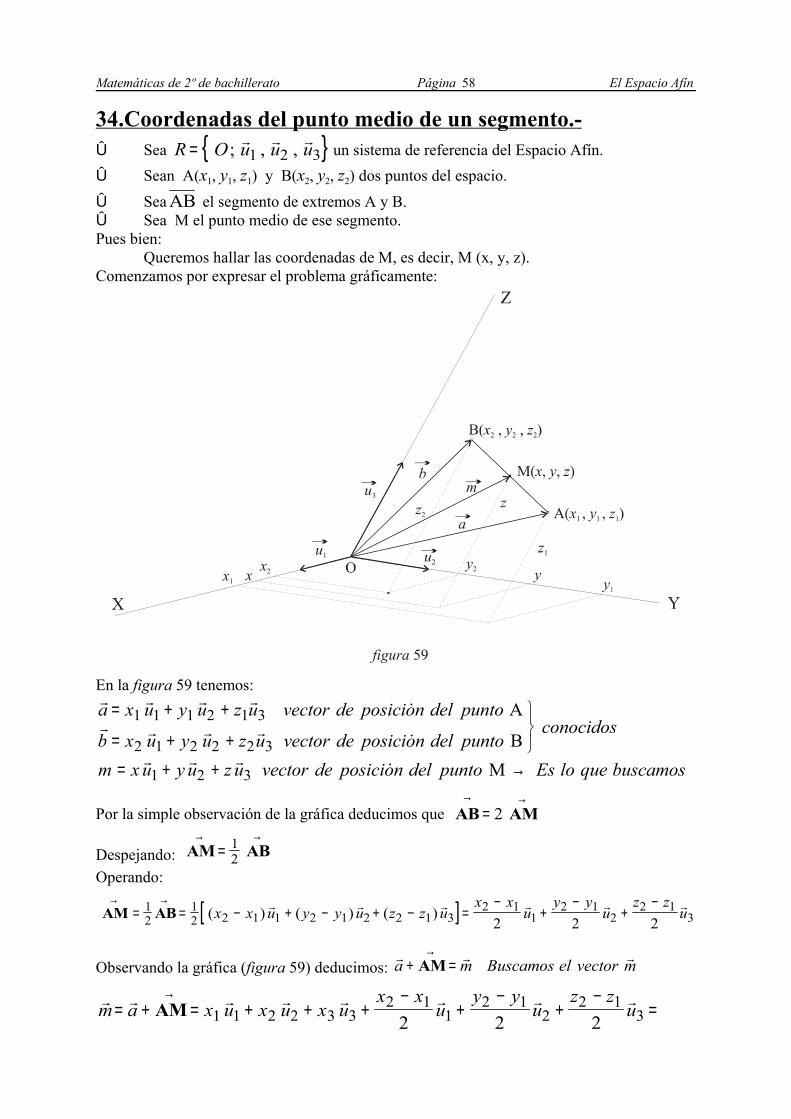
Matemáticas de 2º de bachillerato Página 58 El Espacio Afín
34.Coordenadas del punto medio de un segmento.-º Sea un sistema de referencia del Espacio Afín.{ }R O u u u= ; , ,r r r
1 2 3º Sean A(x1, y1, z1) y B(x2, y2, z2) dos puntos del espacio.º Sea el segmento de extremos A y B.ABº Sea M el punto medio de ese segmento.Pues bien:
Queremos hallar las coordenadas de M, es decir, M (x, y, z).Comenzamos por expresar el problema gráficamente:
En la figura 59 tenemos:r r r r
r r r r
r r r
a x u y u z u vector de posicion del punto
b x u y u z u vector de posicion del puntoconocidos
m x u y u z u vector de posicion del punto Es lo que buscamos
= + +
= + +
= + + →
1 1 1 2 1 3
2 1 2 2 2 3
1 2 3
&
&
&
A
BM
Por la simple observación de la gráfica deducimos que AB AM → →
= 2
Despejando: AM AB → →
= 12
Operando:
[ ]AM AB→ →
= = − + − + − =−
+−
+−1
212 2 1 1 2 1 2 2 1 3
2 11
2 12
2 132 2 2
( ) ( ) ( )x x u y y u z z ux x
uy y
uz z
ur r r r r r
Observando la gráfica (figura 59) deducimos: r r ra m Buscamos el vector m+ =
→AM
r r r r r r r rm a x u x u x ux x
uy y
uz z
u= + = + + +−
+−
+−
=→
AM 1 1 2 2 3 32 1
12 1
22 1
32 2 2

Matemáticas de 2º de bachillerato Página 59 El Espacio Afín
= +−
+ +
−
+ +
−
=
++
++
+x
x xu y
y yu z
z zu
x xu
y yu
z zu1
2 11 1
2 12 1
2 13
1 21
1 22
1 232 2 2 2 2 2
r r r r r r
Por tanto:
De este modo, el punto medio del segmento viene dados por :AB
Ejemplo 33.-Sea un sistema de referencia ortonormal.{ }R = O i j k; , ,
r r r
Sean los puntos A(2, 0, 2´25) y B(0, 2, -1).Queremos determinar (hallar) el punto medio del segmento .AB
Veamos:M(x, y, z) es el punto buscado. Buscamos sus coordenadas x, y, zRepresentemos el problema gráficamente:
r r r rmx x
uy y
uz z
ues el vector de posiciondel punto M x y z=
++
++
+
1 2
11 2
21 2
32 2 2&
( , , )
MAB
x x y y z zsiendo
x y zx y z
1 2 1 2 1 2 1 1 1
2 2 22 2 2+ + +
, ,( , , )( , , )
A(2, 0, 2´25) y B(0, 2, -1) puntosr r r
r r ra i k vector posicionde A
b j k vector posicionde B
= + ′
= −
2 2 25
2
&
&
Una forma:r ra m+ =
→AM
AM
AM
→ − − − − ′
→
= + +
= − + − ′
= + + ′
0 22
2 02
1 2 252
1 625
0 625
r r r
r r r
r r r r
i j k
i j k
m i j kM(1, 1, 0´625)
Otra forma:
( )M
M
2 02
0 22
1 2 252
1 1 0 625
+ + − + ′
′
, ,
, ,
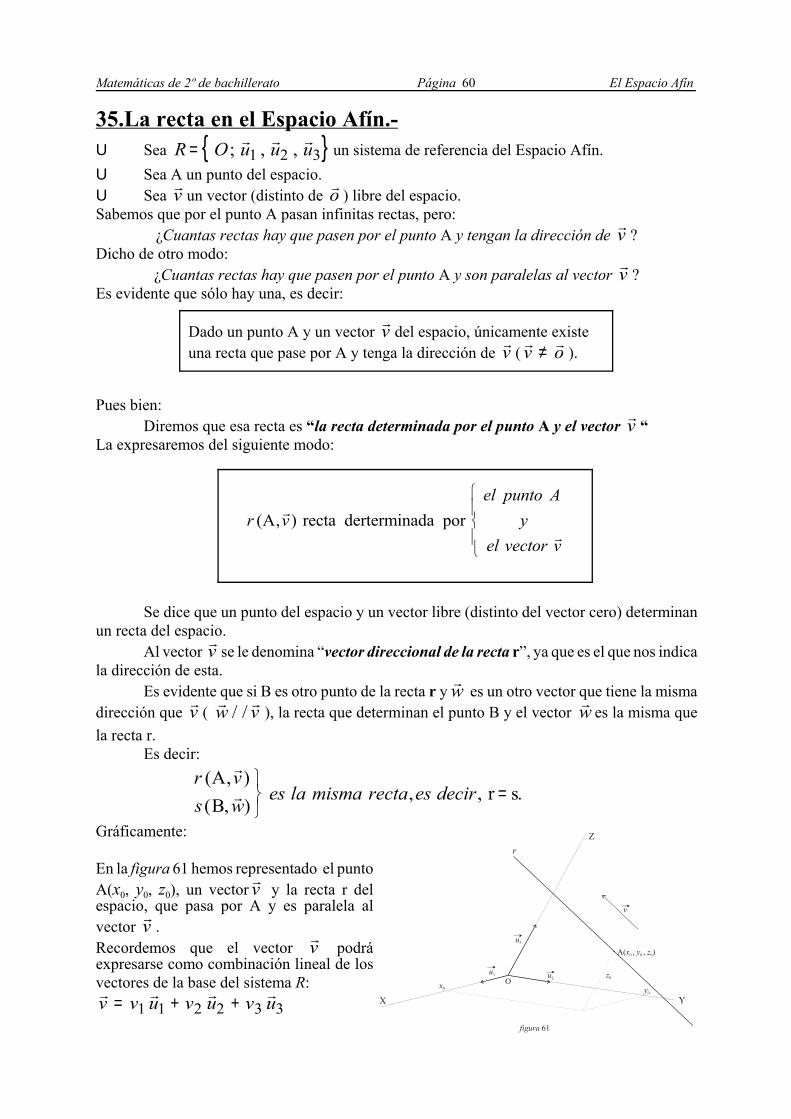
Matemáticas de 2º de bachillerato Página 60 El Espacio Afín
35.La recta en el Espacio Afín.-U Sea un sistema de referencia del Espacio Afín.{ }R O u u u= ; , ,r r r
1 2 3U Sea A un punto del espacio.U Sea un vector (distinto de ) libre del espacio.
rv roSabemos que por el punto A pasan infinitas rectas, pero:
¿Cuantas rectas hay que pasen por el punto A y tengan la dirección de ?rv
Dicho de otro modo:¿Cuantas rectas hay que pasen por el punto A y son paralelas al vector ?
rvEs evidente que sólo hay una, es decir:
Pues bien:Diremos que esa recta es “la recta determinada por el punto A y el vector “
rvLa expresaremos del siguiente modo:
Se dice que un punto del espacio y un vector libre (distinto del vector cero) determinanun recta del espacio.
Al vector se le denomina “vector direccional de la recta r”, ya que es el que nos indicarv
la dirección de esta.Es evidente que si B es otro punto de la recta r y es un otro vector que tiene la misma
rwdirección que ( ), la recta que determinan el punto B y el vector es la misma que
rv r rw v/ / rwla recta r.
Es decir:r vs w es la misma recta es decir
( , )( , ) , , .AB r s
r
r
=
Gráficamente:
En la figura 61 hemos representado el puntoA(x0, y0, z0), un vector y la recta r del
rvespacio, que pasa por A y es paralela alvector .
rvRecordemos que el vector podrá
rvexpresarse como combinación lineal de losvectores de la base del sistema R:r r r rv v u v u v u= + +1 1 2 2 3 3
Dado un punto A y un vector del espacio, únicamente existerv
una recta que pase por A y tenga la dirección de ( ).rv r rv o≠
r vel punto A
yel vector v
( , )A recta derterminada porr
r

Matemáticas de 2º de bachillerato Página 61 El Espacio Afín
En la figura 62 tenemos un punto B(x1,y1,z1)situado en la misma recta anterior y el vector
de la figura 61, multiplicado por &0´5, esrv
decir, el vector r rw v= − ′0 5
Puede apreciarse que el punto B y el vector rw
determinan la misma recta r que determinanel punto A y el vector , es decir:
rvr vr v
es la misma recta( , )( , )
.AB
r
r− ′0 5
Ejemplo 34.-Sea un sistema de referencia ortonormal .{ }R = O i j k; , ,
r r r
Sea el punto A(1, 2, 2´165).Sea el vector libre
r r r rv i j k= − + + ′3 0 5
Queremos dibujar la recta r determinada por el punto A y el vector , es decir, rv r v( , )A r
Veamos:En la figura 63 hemos dibujado:
, El punto A(1, 2, 2´165), El vector
r r r rv i j k= − + + ′3 0 5
Nótese que este vector quedaríaoculto por el plano OYZ.
, La recta , es decir, lar v( , )A r
recta que pasa por el punto A ytiene la dirección del vector .
rv, Nótese, a simple vista, que la
recta r atraviesa el plano OYXpor un punto del “tipo” (0, + , +),el plano OXZ por un punto del“tipo” (+, 0, +) y el plano OXYpor un punto de la forma(+, &, 0).
36.Ecuación de la recta en el Espacio Afín.-' Sea un sistema de referencia del Espacio Afín.{ }R O u u u= ; , ,r r r
1 2 3' Sea A(x0, y0, z0) un punto del espacio, es decir, A0E.' Sea un vector libre. De otro modo,
r r r rv v u v u v u= + +1 1 2 2 3 3rv v v v= ( , , )1 2 3
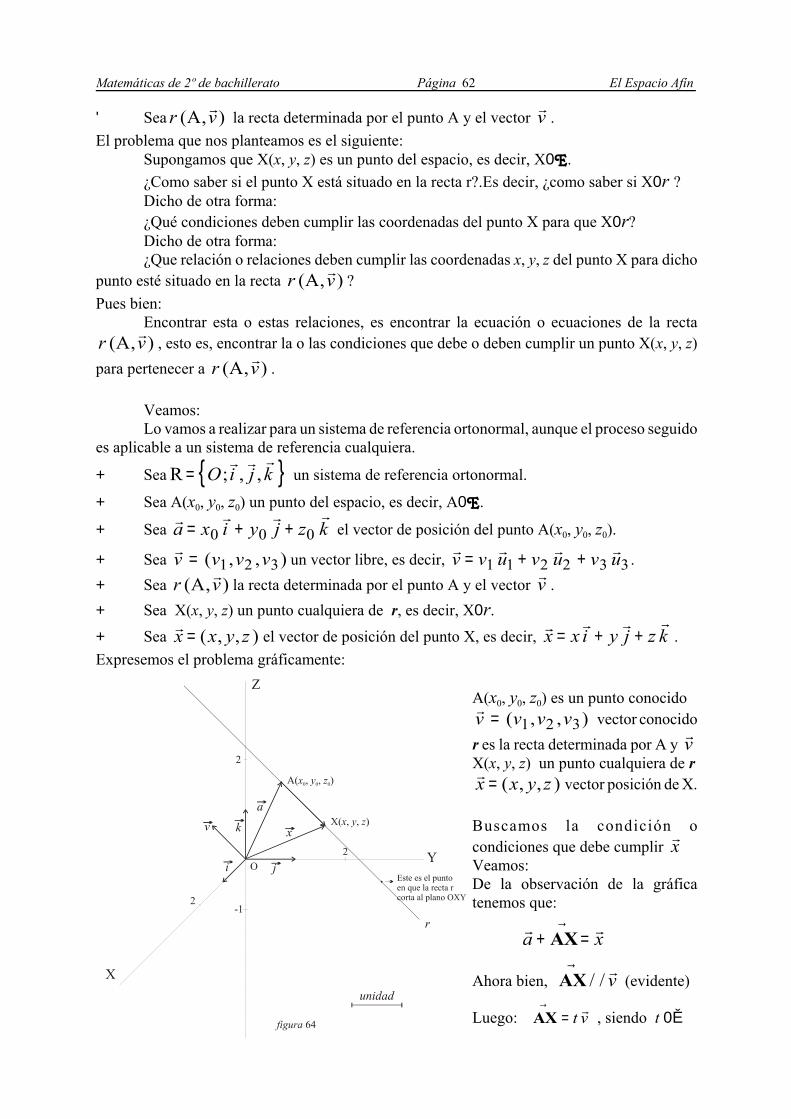
Matemáticas de 2º de bachillerato Página 62 El Espacio Afín
' Sea la recta determinada por el punto A y el vector .r v( , )A r rvEl problema que nos planteamos es el siguiente:
Supongamos que X(x, y, z) es un punto del espacio, es decir, X0E.¿Como saber si el punto X está situado en la recta r?.Es decir, ¿como saber si X0r ?Dicho de otra forma:¿Qué condiciones deben cumplir las coordenadas del punto X para que X0r?Dicho de otra forma:¿Que relación o relaciones deben cumplir las coordenadas x, y, z del punto X para dicho
punto esté situado en la recta ?r v( , )A r
Pues bien:Encontrar esta o estas relaciones, es encontrar la ecuación o ecuaciones de la recta
, esto es, encontrar la o las condiciones que debe o deben cumplir un punto X(x, y, z)r v( , )A r
para pertenecer a .r v( , )A r
Veamos:Lo vamos a realizar para un sistema de referencia ortonormal, aunque el proceso seguido
es aplicable a un sistema de referencia cualquiera.
+ Sea un sistema de referencia ortonormal.{ }R = O i j k; , ,r r r
+ Sea A(x0, y0, z0) un punto del espacio, es decir, A0E.
+ Sea el vector de posición del punto A(x0, y0, z0).r r r ra x i y j z k= + +0 0 0
+ Sea un vector libre, es decir, .rv v v v= ( , , )1 2 3
r r r rv v u v u v u= + +1 1 2 2 3 3+ Sea la recta determinada por el punto A y el vector .r v( , )A r rv+ Sea X(x, y, z) un punto cualquiera de r, es decir, X0r.
+ Sea el vector de posición del punto X, es decir, .rx x y z= ( , , ) r r r r
x x i y j z k= + +Expresemos el problema gráficamente:
A(x0, y0, z0) es un punto conocido vector conocido
rv v v v= ( , , )1 2 3r es la recta determinada por A y
rvX(x, y, z) un punto cualquiera de r
vector posición de X.rx x y z= ( , , )
Buscamos la condición ocondiciones que debe cumplir
rxVeamos:De la observación de la gráficatenemos que:
r ra x+ =→
AX
Ahora bien, (evidente)AX →
/ / rv
Luego: , siendo t 0úAX→
= t vr

Matemáticas de 2º de bachillerato Página 63 El Espacio Afín
Por tanto: Expresión que se denominaecuación vectorial de la recta r
Esta relación vectorial nos dice lo que debe cumplir un vector de posiciónr r rx a t v= + rx
de un punto X que está situado en la recta .r v( , )A r
La igualdad del recuadro anterior la podemos expresar del siguiente modo:
Ecuación vectorial de la recta r
Operando en la expresióndel último recuadro tenemos:
( )( , , ) ( , , ) , ,( , , ) ( , , )x y z x y z t v t v t vx y z x t v y t v z t v
= += + + +
0 0 0 1 2 3
0 1 0 2 0 3Es decir:
Ecuaciones paramétricas de la recta rt es un número real variable que se denominaparámetro.
El significado de lo anterior es lo siguiente:s Supongamos un punto cualquiera del espacio, es decir, X(x, y, z)s Es evidente que puede ocurrir alguna de las situaciones siguientes:
X A XX A X
∈∉
r v el punto esta en rr v el punto no esta en r
( , ) & .( , ) &
rLL
rLL
Pues bien:
X A R( , , ) ( , )x y z r v tx x t vy y t vz z t v
∈ ⇔ ∃ ∈= += += +
r0 1
0 2
0 3El significado es el siguiente:
Si despejamos t en las ecuaciones paramétricas tenemos:
tx x
vt
y yv
tz z
v=
−=
−=
−0
1
0
2
0
3; ;
Como t es el mismo número real, igualando:
r r rx a t v siendo t= + ∈ R
( , , ) ( , , ) ( , , )x y z x y z t v v v con t= + ∈0 0 0 1 2 3 R
x x t vy y t vz z t v
t= += += +
∈0 1
0 2
0 3
R
“Un punto X(x, y, z) está situado en la recta sí y sólo sí exister v( , )A r
un número real t tal que x = x0 + t v1 ; y = y0 + t v2 ; z = z0 + t v3"

Matemáticas de 2º de bachillerato Página 64 El Espacio Afín
z n x q= +
Igualdades que reciben el nombre deecuaciones continuas de r.
Observa que los denominadores de las igualdades anteriores nos dan directamente lascomponentes del vector direccional .
rvEl significado de las ecuaciones continuas de la recta r es el siguiente:
AA
X
X A
( , , )( , , )
. ( , )
( , , ) .
( , )
x y zv v v v
punto y vector conocidos r v
x y z es un punto cualquiera del espacio
r vx x
vy y
vz z
v
0 0 0
1 2 3
0
1
0
2
0
3
rr
r
=
∈ ⇔−
=−
=−
Operemos en las igualdades de las ecuaciones continuas:x x
vy y
vv x x v y y
v x v x v y v yv x v x v y v y
Despejando y yv x v x v y
vy
vv
xvv
x y
−=
−⇒ − = −
− = −− + =
=− +
= − +
0
1
0
22 0 1 0
2 2 0 1 1 0
2 2 0 1 0 1
2 2 0 1 0
1
2
1
2
10 0
( ) ( )
: ;
Considerando que son números y llamando :x y v v0 0 1 2, , , m y p x yvv
vv= = − +2
1
2
10 0
y m x p= +Seguimos operando con las igualdades de las ecuaciones continuas:
x xv
z zv
v x x v z z
v x v x v z v zv x v x v z v z
Despejando z zv x v x v z
vz
vv
xvv
x z
−=
−⇒ − = −
− = −− + =
=− +
= − +
0
1
0
33 0 1 0
3 3 0 1 1 0
3 3 0 1 0 1
3 3 0 1 0
1
3
1
3
10 0
( ) ( )
: ;
Considerando que son números y llamando :x z v v0 0 1 3, , , n y q x zvv
vv= = − +3
1
3
10 0
Por tanto:
En la expresión anterior tenemos dos ecuaciones en las que aparecen las variables y y
x xv
y yv
z zv
−=
−=
−0
1
0
2
0
3
Ecuaciones reducidas de la recta r, respecto de la variable x.y m x pz n x q
= += +
Matemáticas de 2º de bachillerato Página 65 El Espacio Afín
z n y q= ′ + ′
z despejadas en función de la variable x. Dicha forma de expresar la recta r se denomina“ecuaciones reducidas de r en función (o con respecto) de x”.
Podríamos expresar la recta r mediante sus ecuaciones reducidas en función de y:x x
vy y
vv x x v y y
v x v x v y v yv x v y v y v x
Despejando x xv y v y v x
vx
vv
yvv
y x
−=
−⇒ − = −
− = −= − +
=− +
= − +
0
1
0
22 0 1 0
2 2 0 1 1 0
2 1 1 0 2 0
1 1 0 2 0
2
1
2
1
20 0
( ) ( )
: ;
Considerando que son números y llamando :x y v v0 0 1 2, , , m y p y xvv
vv′ = ′ = − +1
2
1
20 0
x m y p= ′ + ′Expresemos ahora la variable z en función de y:
y yv
z zv
v y y v z z
v y v y v z v zv y v y v z v z
Despejando z zv y v y v z
vz
vv
yvv
y z
−=
−⇒ − = −
− = −− + =
=− +
= − +
0
2
0
33 0 2 0
3 3 0 2 2 0
3 3 0 2 0 2
3 3 0 2 0
2
3
2
3
20 0
( ) ( )
: ;
Llamando :n y q y zvv
vv′ = ′ = − +3
2
3
20 0
Por tanto:
Del mismo modo obtendríamos:
El significado de alguna de las ecuaciones reducidas de la recta r es el siguiente:
X A( , , ) ( , ) , , , .x y z r vy m x pz n x q
siendo m p n q numeros reales fijos∈ ⇔= += +
r
Ecuaciones reducidas de la recta r, respecto de la variable y.x m y pz n y q
= ′ + ′= ′ + ′
Ecuaciones reducidas de la recta r, respecto de la variable z.x m z py n z q
= ′ ′ + ′ ′= ′ ′ + ′ ′

Matemáticas de 2º de bachillerato Página 66 El Espacio Afín
Ejemplo 35.-Sea un sistema de referencia ortonormal.{ }R O i j k= ; , ,
r r r
Sea A(2, 3, 5/2) un punto del espacio.Sea
r r r r rv i j k es decir v= − + = −2 3 2 2 3 2, , ( , , )Sea la recta determinada por A y .r v( , )A r rv
Pretendemos lo siguiente:a) Dibujar la recta .r v( , )A r
b) Hallar la ecuación vectorial de .r v( , )A r
c) Hallar las ecuaciones paramétricas de .r v( , )A r
d) Hallar las ecuaciones continuas de .r v( , )A r
e) Hallar las ecuaciones reducidas de en función de la variable x.r v( , )A r
f) Hallar las ecuaciones reducidas de en función de la variable z.r v( , )A r
Veamos:a) Dibujemos los datos y la recta:
En la figura 65 hemosdibujado la recta r v( , )A r
que puede observarse esparalela al vector .
rv
El punto X(x, y, z) es unpunto cualquiera situado enla recta y el vectorr v( , )A r
es su vector de posición.rx
r r r rx x i y j z k= + +
Buscamos la o las relacionesque deben cumplir losvalores de x, y, z de un puntoX(x, y, z) para que este seencuentre en la rectadeterminada por el puntoA(2, 3, 5/2) y el vector libre
.rv = −( , , )2 3 2
b) Hallemos la ecuación vectorial de :r v( , )A r
Sea X(x, y, z) un punto del espacio y su vector de posición.r r r rx x i y j z k= + +
Supongamos que X0 , esto es, el punto X está en la recta cuya ecuación buscamosr v( , )A r
De la simple observación de la gráfica deducimos que .r rx a= +→
AX
Ahora bien, es evidente que , es decir, , siendo t 0ú.AX→
/ / rv AX→
= t vr
Por tanto: r r rx a t v con t= + ∈ R
Expresando los vectores como expresiones de ú3 :

Matemáticas de 2º de bachillerato Página 67 El Espacio Afín
x t t
y t t
z t t
tx y z
x
y
z
= + ⇒ =
= − ⇒ =
= + ⇒ =
⇒ =−
=−
−=
−
−
−−−
2 2
3 3
2
22
33 2
22
33
52 2
52
52
( )
y xy x y x y x
z xz x z x z x
−−
=−
⇒ − = − − ⇒ − = − + ⇒ = − +
−=
−⇒ − = − ⇒ − = − ⇒ = +
33
22
2 3 3 2 2 6 3 6 6
22
22 2 2 2 5 2 4
32
52 5
212
( ) ( )
( )
Ecuación vectorial de r v( , )A r
c) De la ecuación vectorial obtenemos las ecuaciones paramétricas:
( ) ( ) ( )( ) ( ) ( )( ) ( )
x y z t
x y z t t t
x y z t t t
, , , , , ,
, , , , , ,
, , , ,
= + −
= + −
= + − +
2 3 2 3 2
2 3 2 3 2
2 2 3 3 2
5252
52
De donde:Ecuaciones paramétricas de la rectadeterminada por el punto A(2, 3, 5/2) yel vector
rv = −( , , )2 3 2
Observa que las ecuacionesparamétricas son 3 y para cada valor delparámetro t tenemos un punto de larecta.
d) Las ecuaciones continuas de se obtienen de sus ecuaciones paramétricas.r v( , )A r
Despejando el paramétro t e igualando:
Por tanto:Ecuaciones continuas de r v( , )A r
Observa que en los numeradores aparecen lascoordenadas del punto A y en losdenominadores las componentes del vector
rv
e) De las ecuaciones continuas obtenemos las ecuaciones reducidas:
Ecuaciones reducidas de la recta en función de lar v( , )A r
variable x.Son las relaciones que deben cumplir las coordenadas x,y, z de un punto X(x, y, z) para estar en .r v( , )A r
x ty t
z t
t= += −
= +
∈2 23 3
252
R
x y z−=
−−
=−2
23
3 2
52
y x
z x
= − +
= +
32
12
6
( ) ( )( , , ) , , , ,x y z t con t= + − ∈2 3 2 3 252 R

Matemáticas de 2º de bachillerato Página 68 El Espacio Afín
( )B A− − ∈4 12 72, , ( , )r vr
( )
x zx z x z x z
y zy z y z y z
−=
−⇒ − = − ⇒ − = − ⇒ = −
−−
=−
⇒ − = − − ⇒ − = − + ⇒ = − +
22 2
2 2 2 2 4 2 5
33 2
2 3 3 2 6 3
52 5
212
52 5
2152
32
274
( ) ( )
( )
f) Nuevamente, de las ecuaciones continuas obtenemos las ecuaciones reducidas en funciónde la variable z.
Ecuaciones reducidas de la recta en función de lar v( , )A r
variable z.Son las relaciones que deben cumplir las coordenadas x, y, zde un punto X(x, y, z) para estar en .r v( , )A r
Ejemplo 36.-Consideremos la recta del ejemplo anterior (ejemplo 35).r v( , )A r
Sea el punto , del espacio.( )B − −4 12 72, ,
Queremos saber si el punto B está situado en o está fuera de ella.r v( , )A r
Veamos:þ Utilizando las ecuaciones paramétricas:
( )B r v tt
t
t
− − ∈ ⇔ ∃ ∈− = +
= −
− = +
4 124 2 2
12 3 3
2
72
72
52
, , ( , )A Rr
Resolvamos el sistema:
− = + ⇒ = − ⇒ = −= − ⇒ = − ⇒ = −
− = + ⇒ = − ⇒ = − ⇒ = −
⇒ = −4 2 2 2 6 3
12 3 3 3 9 3
2 2 2 6 3
372
52
122
t t tt t t
t t t t
t existe t( )
Conclusión:
Apréciese que si consideramos la recta s determinada por el punto B y el vector , serv
verifica que , es decir, se trata de la misma recta.r v s v( , ) ( , )A Br r≡
þ Utilizando las ecuaciones continuas:
( )B A− − ∈ ⇔− −
=−
−=
− −4 12
4 22
12 33 2
72
72
52, , ( , )r vr
Veamos si es cierto:&3 = &3 = &3 . Por tanto, el punto B está en la recta r.
x z
y z
= −
= − +
12
32
274
Se trata de ver si un sistemade tres ecuaciones con unaincógnita t tiene solución, esdecir, existe un número t queverifica las tres ecuaciones.

Matemáticas de 2º de bachillerato Página 69 El Espacio Afín
þ Utilicemos ahora las ecuaciones reducidas respecto de la variable x.
( )B A− − ∈ ⇔= − ⋅ − +
− = − +
− ⋅ − + = + =
− + = −
4 12
12 4 6
4
4 6 6 6 12
472
32
72
12
32
12
72
, , ( , )( ) ( )
r v Veamosr
Por tanto, el punto B está en la recta .r v( , )A r
Ejemplo 37.-Consideremos la recta del ejemplo anterior (ejemplo 35).r v( , )A r
Sea el punto , del espacio.( )C 10 9 5, ,−Queremos saber si el punto C está situado en o está fuera de ella.r v( , )A r
Veamos:Lo haremos utilizando las ecuaciones paramétricas de :r v( , )A r
( )C A R10 9 510 2 2
9 3 3
5 2
10 2 2 49 3 3 4
5 252
52
54
, , ( , )− ∈ ⇔ ∃ ∈= +
− = −
= +
= + ⇒ =− = − ⇒ =
= + ⇒ =
r v ttt
t
veamost tt t
t t
r
Es decir, el sistema no tiene solución.Conclusión: El punto no está en la recta ( )C 10 9 5, ,− r v( , )A r
Ejemplo 38.-Consideremos la misma recta del ejemplo 35.Ahora queremos encontrar tres puntos que estén situados en dicha recta.
Veamos:- Si utilizamos las ecuaciones paramétricas, para cada valor que demos a t obtenemos un
punto de la recta
Para t tenemosxy
z
r v== + ⋅ == − ⋅ =
= + ⋅ = + =
′ ∈12 2 1 43 3 1 0
2 1 2
4 0 4 552
52
92
Por tanto P A( , , ) ( , )r
- También podemos utilizar las ecuaciones reducidas:
( )
( )
Para xy
zQ r v
Para xy
zS r v
= ⇒= − ⋅ + =
= + =
⇒ ∈
= ⇒= − ⋅ + =
= + =
⇒ ∈
00 6 6
00 6
6
11
32
12
12
12
12
32
12
214
12
12
12
214
, , ( , )
, , ( , )
A
A
r
r
Observa que el punto Q está en el plano OYZ, es decir, es el corte de r con ese plano.

Matemáticas de 2º de bachillerato Página 70 El Espacio Afín
Ejemplo 39.-Consideremos nuevamente la recta del ejemplo 35.Ahora queremos hallar:a) El punto en que la recta corta (“atraviesa”) al plano OXY.r v( , )A r
b) El punto en que la recta corta (“atraviesa”) al plano OXZ.r v( , )A r
Veamos:a) Llamemos D al punto buscado. Dicho punto debe cumplir:
D AD OXYD( , ,0)
D OXY∈∈
= ∈r v
x yDebe ser z por ser
( , )r
0
De las ecuaciones reducidas:
( )z x x
x ycorte de r con
= ⇒ = + ⇒ = −
= − ⇒ = − ⋅ + = + =
⇒−
−0 0
6 60
12
12
12
32
12
34
274
12
274D OXY, ,
b) Llamemos E al punto buscado. Dicho punto debe cumplir:E AD OXZD( , , z)
D OXZ∈∈
= ∈r v
xDebe ser y por ser
( , )r
00
Este punto lo vamos a sacar de las ecuaciones paramétricas:
( )y
x t
t tx
z
z t
= ⇒
= +
= − ⇒ = ⇒= + ⋅ =
= + ⋅ =
= +
∈0
2 2
0 3 3 12 2 1 4
2 1
2
4 052
92
52
92Por tanto E OXZ, ,
Observación:Las ecuaciones paramétricas, continuas y reducidas de una recta r, no son únicas, es decir,
pueden tener aspectos diferentes aunque representen a la misma recta. Ello se debe a que la formaque adopta cada una de las ecuaciones depende del punto A que elijamos y del vector direccional
rv
Ejemplo 40.-Una recta r del espacio viene dada por las siguientes ecuaciones en forma continua:
x yz
+=
−−
= +3
52
21
Queremos lo siguiente:a) Hallar un punto de esa recta.b) Hallar un vector direccional de ella.

Matemáticas de 2º de bachillerato Página 71 El Espacio Afín
c) Sus ecuaciones reducidas en función de la variable x.d) Sus ecuaciones paramétricas.e) Su ecuación vectorial.
Veamos:a) La forma continua de una recta es:
x xv
y yv
z zv
siendox y z un punto de la recta r
v v v v vector direccional de r−
=−
=−
=
0
1
0
2
0
2
0 0 0
1 2 2
A ( , , )( , , )r
En nuestro caso:
x y zsiendo
A un punto de la rectav un vector direccional
− −=
−−
=− − − −
= −
( ) ( ) ( , , )( , , )
35
22
11
3 2 15 2 1r
Por tanto:
b)
c) De la forma continua sacamos las ecuaciones reducidas. Veamos:y x
y x y x y x
zx
z x z x
−−
=+
⇒ − = − − ⇒ = − + ⇒ = − +
+ =+
⇒ = + − ⇒ = −
22
35
5 10 2 6 5 2 4
13
51
25
45
15
35
15
25
Por tanto:
d) Con un punto y un vector director (o direccional) de la recta r, podemos escribir susecuaciones paramétricas directamente. Llamamos t al parámetro.
e) Con el punto A y el vector podemos escribir directamente la ecuación vectorial:rv
A (&3, 2 , &1) es un punto de r
= (5, &2 , 1) es un vector direccional de rrv
x ty tz t
t para cada valor de t obtenemos un punto= − += −= − +
∈3 5
2 21
R ( ).
y x
z xecuaciones reducidas en funcion de x
= − +
= −
25
45
15
25
&
r r rr
r
x a t vx y z t
siendotx vector de posicion de x y z ra vector de posicion de
= += − − + −
∈∈
− −
( , , ) ( , , ) ( , , )
( , , )( , , )
3 2 1 5 2 13 2 1
RXA
Matemáticas de 2º de bachillerato Página 72 El Espacio Afín
Ejemplo 41.-Las ecuaciones reducidas, respecto de x, de una recta r son:
Observa que se trata de la misma recta que la del ejemplo 40.y x
z x
= − +
= −
25
45
15
25
Pretendemos lo siguiente:a) A partir de las ecuaciones dadas, encontrar las ecuaciones continuas.b) Hallar un punto de r y un vector direccional (distintos de los del ejemplo 40).c) Hallar las ecuaciones paramétricas de r (distintas de las del ejemplo 40).d) Hallar el punto en el que la recta r corta al plano OXY.
Veamos:a) Consideremos la primera de las ecuaciones reducidas y despejamos x :
y x y xy
xx y
= − + ⇒ − = − ⇒−
−= ⇒
−=
−
−25
45
45
25
45
25
45
25
01
Consideremos ahora la segunda de las ecuaciones reducidas y volvemos a despejar x :
z x z xz
xx z
= − ⇒ + = ⇒+
= ⇒−
=+1
525
25
15
25
15
25
15
01
Igualando:
Observa que el punto B es el punto en el que la recta r corta al plano OYZ.
b) En el apartado a) ha quedado contestado este apartado.
c) De las ecuaciones reducidas también podemos obtener las ecuaciones paramétricas.Veamos como:
Observa que se tratan de unas ecuacionesparamétricas en las que el punto que nos dadirectamente es B y el vector director es .
ruObserva que son distintas de las obtenidas enel ejemplo 40.
d) Al plano OXY lo cortará en un punto de la forma C (x, y, 0), es decir, z = 0.Lo hacemos a partir de las reducidas:
( )z x x x
x y yC es el punto buscado
= ⇒ − = ⇒ = ⇒ =
= ⇒ = − ⋅ + ⇒ =
⇒
0 0 2
2 2 02 0 0
15
25
15
25
25
45
, ,
( )( )
x y zsiendo
un punto de r
u un vector direccional de r
−=
−
−=
+ −
= −
01
0
1
45
25
25
15
45
25
25
15
B , ,
, ,r
t es el parametro
x t
y t
z t
&
= +
= −
= − +
045
25
25
15
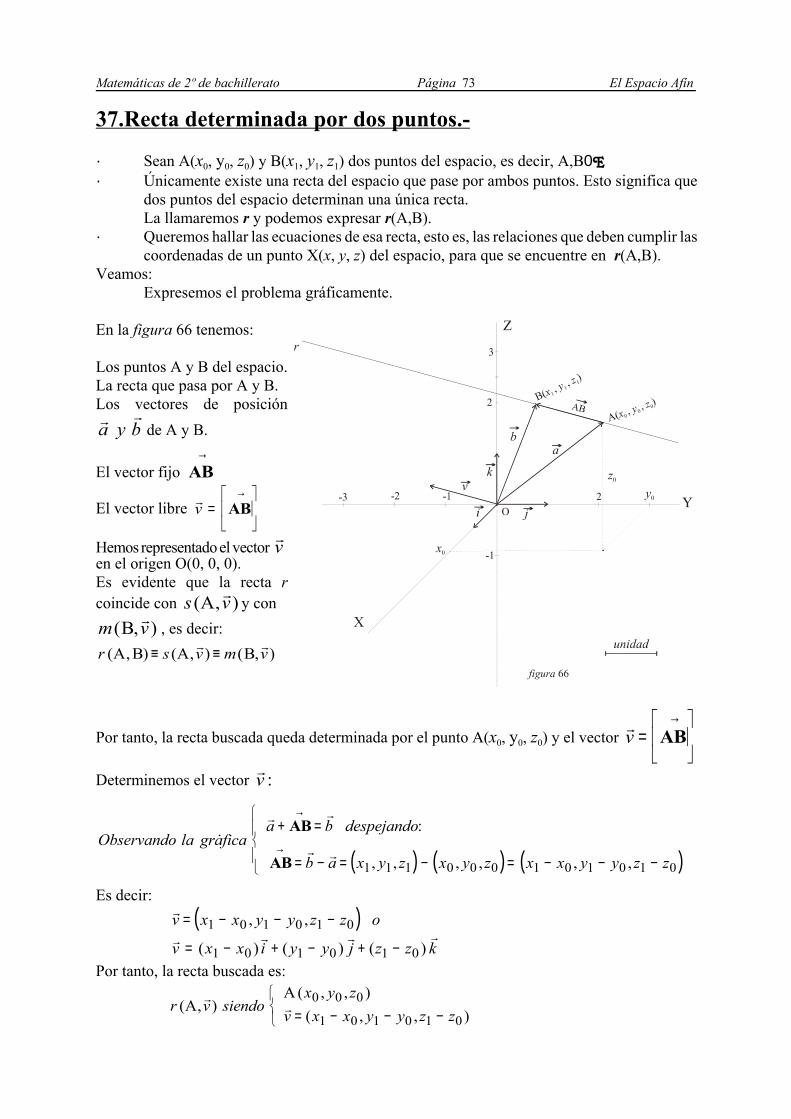
Matemáticas de 2º de bachillerato Página 73 El Espacio Afín
37.Recta determinada por dos puntos.-
– Sean A(x0, y0, z0) y B(x1, y1, z1) dos puntos del espacio, es decir, A,B0E– Únicamente existe una recta del espacio que pase por ambos puntos. Esto significa que
dos puntos del espacio determinan una única recta. La llamaremos r y podemos expresar r(A,B).
– Queremos hallar las ecuaciones de esa recta, esto es, las relaciones que deben cumplir lascoordenadas de un punto X(x, y, z) del espacio, para que se encuentre en r(A,B).
Veamos:Expresemos el problema gráficamente.
En la figura 66 tenemos:
Los puntos A y B del espacio.La recta que pasa por A y B.Los vectores de posición
de A y B.r ra y b
El vector fijo AB→
El vector libre rv =
→AB
Hemos representado el vector rv
en el origen O(0, 0, 0).Es evidente que la recta rcoincide con y con s v( , )A r
, es decir:m v( , )B r
r s v m v( , ) ( , ) ( , )A B A B≡ ≡r r
Por tanto, la recta buscada queda determinada por el punto A(x0, y0, z0) y el vector rv =
→AB
Determinemos el vector rv :
( ) ( ) ( )Observando la grafica
a b despejando
b a x y z x y z x x y y z z&
:
, , , , , ,
r r
r r
+ =
= − = − = − − −
→
→
AB
AB
1 1 1 0 0 0 1 0 1 0 1 0
Es decir:
( )r
r r r rv x x y y z z o
v x x i y y j z z k
= − − −
= − + − + −1 0 1 0 1 0
1 0 1 0 1 0
, ,
( ) ( ) ( )Por tanto, la recta buscada es:
r v siendox y z
v x x y y z z( , )
( , , )( , , )
AArr
0 0 0
1 0 1 0 1 0= − − −

Matemáticas de 2º de bachillerato Página 74 El Espacio Afín
( )( )
( , , ) ( , , ) ( , , )
( , , ) ( , , ) ( ) , ( ) , ( )
( , , ) ( ) , ( ) , ( )
x y z x y z t x x y y z z
x y z x y z t x x t y y t z z
x y z x t x x y t y y z t z z
= + − − −
= + ⋅ − ⋅ − ⋅ −
= + ⋅ − + ⋅ − + ⋅ −
0 0 0 1 0 1 0 1 0
0 0 0 1 1 0 1 0
0 1 0 1 0 0 1 0
• Ecuación vectorial:
X A X
R
( , , ) ( , ) ( & )
/ / ,
x y z r v x a x vector de posicion de
Como v tenemos que t v con t
∈ ⇔ = +
= ∈
→
→ →
r r r r
r r
AX
AX AXPor tanto:
r r rx a t v con t= + ∈ RSubstituyendo:
• Ecuaciones paramétricas: Las obtenemos desarrollando la ecuación vectorial.
Igualando el vector de la izquierda con el de la derecha:
Ecuaciones paramétricas de larecta que pasa por los puntosA(x0, y0, z0) y B(x1, y1, z1)
• Ecuaciones continuas: Las obtenemos de las paramétricas.Despejando el parámetro t en las paramétricas e igualando:
tx xx x
y yy y
z zz z
=−−
=−−
=−−
0
1 0
0
1 0
0
1 0Por tanto:
Ecuaciones continuas de la recta quepasa por los puntos A(x0, y0, z0) yB(x1, y1, z1).
• Ecuaciones reducidas: Las obtenemos de la forma continua.
y yy y
x xx x
y yx xx x
y y ordenando y m x p
z zz z
x xx x
z zx xx x
z z ordenando z n x q
−−
=−−
⇒ − =−−
⋅ − ⇒ = +
−−
=−−
⇒ − =−−
⋅ − ⇒ = +
0
1 0
0
1 00
0
1 01 0
0
1 0
0
1 00
0
1 01 0
( ) ( )
( ) ( )
con t 0ú( , , ) ( , , ) ( , , )x y z x y z t x x y y z z= + − − −0 0 0 1 0 1 0 1 0
x x x x ty y y y tz z z z t
t= + − ⋅= + − ⋅= + − ⋅
∈0 1 0
0 1 0
0 1 0
( )( )( )
R
x xx x
y yy y
z zz z
−−
=−−
=−−
0
1 0
0
1 0
0
1 0
y m x pz n x q forma reducida en funcion de x
= += +
&
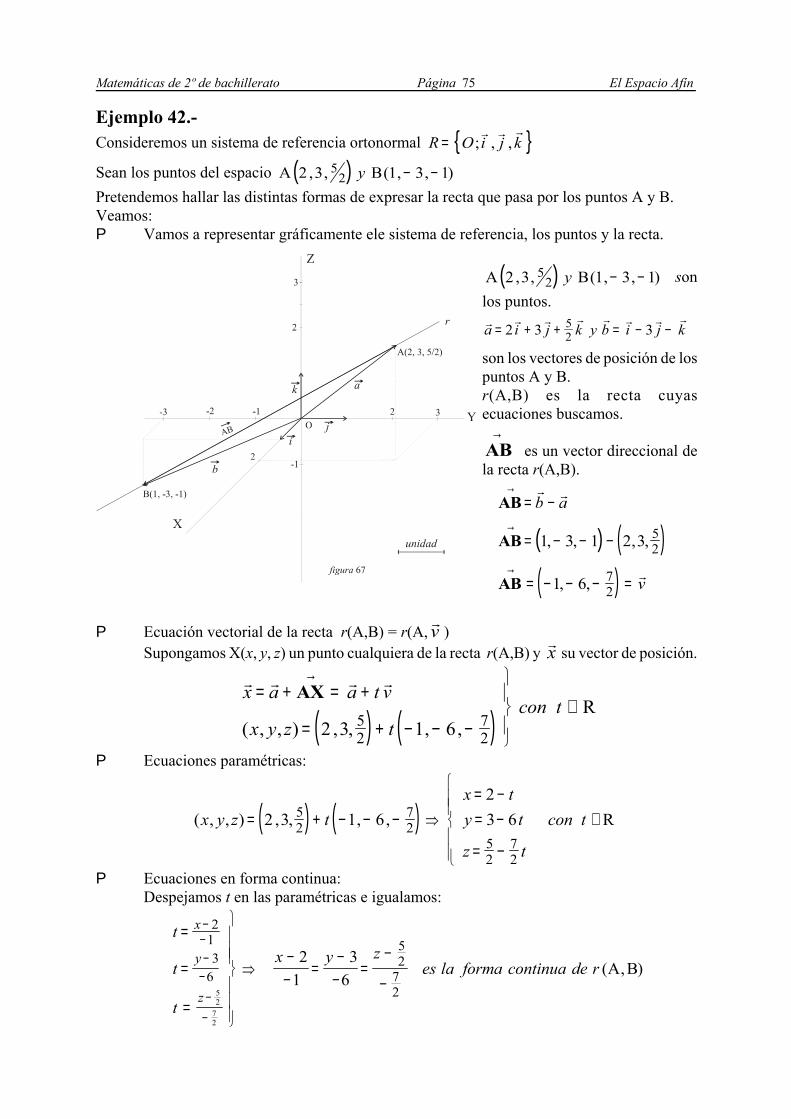
Matemáticas de 2º de bachillerato Página 75 El Espacio Afín
Ejemplo 42.-Consideremos un sistema de referencia ortonormal { }R O i j k= ; , ,
r r r
Sean los puntos del espacio ( )A B2 3 1 3 152, , ( , , )y − −
Pretendemos hallar las distintas formas de expresar la recta que pasa por los puntos A y B.Veamos:P Vamos a representar gráficamente ele sistema de referencia, los puntos y la recta.
son( )A B2 3 1 3 152, , ( , , )y − −
los puntos.r r r r r r r ra i j k y b i j k= + + = − −2 3 35
2
son los vectores de posición de lospuntos A y B.r(A,B) es la recta cuyasecuaciones buscamos.
es un vector direccional deAB →
la recta r(A,B).
( ) ( )( )
AB
AB
AB
→
→
→
= −
= − − −
= − − − =
r r
r
b a
v
1 3 1 2 3
1 6
52
72
, , , ,
, ,
P Ecuación vectorial de la recta r(A,B) = r(A, )rv
Supongamos X(x, y, z) un punto cualquiera de la recta r(A,B) y su vector de posición.rx
( ) ( )r r r rx a a t v
x y z tcon t
= + = +
= + − − −
∈
→AX
( , , ) , , , ,2 3 1 652
72
R
P Ecuaciones paramétricas:
( ) ( )( , , ) , , , ,x y z tx ty t
z t
con t= + − − − ⇒= −= −
= −
∈2 3 1 623 65
272
52
72
R
P Ecuaciones en forma continua:Despejamos t en las paramétricas e igualamos:
t
t
t
x y zes la forma continua de r
x
y
z
=
=
=
⇒−−
=−
−=
−
−
−−−
−−
−
213
6
52
725
272
21
36
( , )A B
Matemáticas de 2º de bachillerato Página 76 El Espacio Afín
P Forma reducida de r(A,B) en función de x :
y xy x y x
z xz x z x z x
y x
z x
−−
=−−
⇒ − + = − + ⇒ = −
−
−=
−−
⇒ − + = − + ⇒ − = − + ⇒ = −
⇒= −
= −
36
21
3 6 12 6 9
21
7
6 952
72
52
72
72
92
72
92
72
92
P Todos los puntos del espacio que tengan la forma están en la( )X x x x, ,6 9 72
92− −
recta r(A,B).Para encontrar un punto cualquiera, por ejemplo el punto en que la recta corta al planocartesiano OYZ, hacemos x = 0 :
( )x P punto de corte de r con= ⇒ − −0 0 9 92, , ( , )A B OYZ
38.El plano en el Espacio Afín. Ecuaciones del plano.-L Sea un sistema de referencia del Espacio Afín.{ }R = O u u u; , ,r r r
1 2 3L Sea A(x0, y0, z0) un punto cualquiera del espacio, es decir, A0EL Sean dos vectores libres linealmente independientes, es decir, son distintos de
r ru y v ro
y no paralelos: r r r r r r r ru u u u u u u y v v u v u v u= + + = + +1 1 2 2 3 3 1 1 2 2 3 3
L Hagamos coincidir los vectores en el punto A, es decir, haciendo origen en A.r ru y v
L Es fácil apreciar que el punto A y los vectores determinan un plano, es decir, sólor ru y v
existe un plano que contiene a la “figura” formada por A y ambos vectores. Se diceentonces que ese plano es el plano determinado por el punto A y los vectores . Lo
r ru y vdesignaremos con la letra griega Π. Veamos como se expresa:
Plano determinado por el punto A y los vectores Π ( , , )A r ru v → r ru y v
K Supongamos que X(x,y,.z) es un punto del espacio, es decir, X0EK Puede ocurrir que ese punto esté en el plano Π o que no esté en el plano Π, es decir:
X0Π o XóΠK ¿Que deben cumplir las coordenadas x, y, z de un punto X para que dicho punto se
encuentre situado en le plano ? Π ( , , )A r ru vEncontrar esta (o estas) relaciones es encontrar la (o las) ecuaciones del planoΠ ( , , )A r ru v
Veamos:Comencemos por expresar el problema gráficamente. En la figura 68 (página 77) hemos
representado el plano en el que se encuentra el punto A y los vectores Π ( , , )A r ru vr ru y v
El vector es el vector de posición del punto A.ra
El punto X(x,y,z) es un punto cualquiera del espacio que se encuentra en el plano Π y es su vector de posición.
r r r rx x u y u z u= + +1 2 3
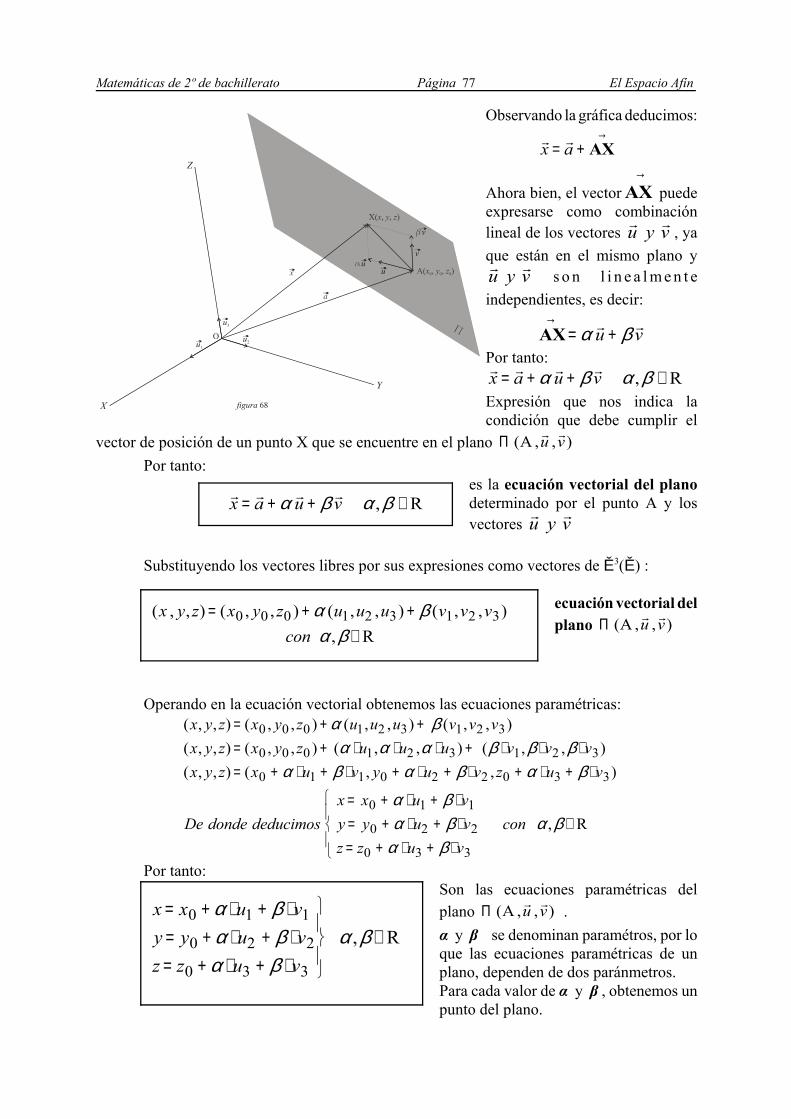
Matemáticas de 2º de bachillerato Página 77 El Espacio Afín
Observando la gráfica deducimos:r rx a= +
→AX
Ahora bien, el vector puedeAX →
expresarse como combinaciónlineal de los vectores , ya
r ru y vque están en el mismo plano y
s o n l i n e a l m e n t er ru y v
independientes, es decir:
AX →
= +α βr ru vPor tanto:r r r rx a u v= + + ∈α β α β, R
Expresión que nos indica lacondición que debe cumplir el
vector de posición de un punto X que se encuentre en el plano Π ( , , )A r ru vPor tanto:
es la ecuación vectorial del planodeterminado por el punto A y losvectores
r ru y v
Substituyendo los vectores libres por sus expresiones como vectores de ú3(ú) :
ecuación vectorial delplano Π ( , , )A r ru v
Operando en la ecuación vectorial obtenemos las ecuaciones paramétricas:( , , ) ( , , ) ( , , ) ( , , )( , , ) ( , , ) ( , , ) ( , , )( , , ) ( , , )
x y z x y z u u u v v vx y z x y z u u u v v vx y z x u v y u v z u v
De donde deducimosx x
= + += + ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅= + ⋅ + ⋅ + ⋅ + ⋅ + ⋅ + ⋅
= + ⋅
0 0 0 1 2 3 1 2 3
0 0 0 1 2 3 1 2 3
0 1 1 0 2 2 0 3 3
0
α βα α α β β β
α β α β α β
α u vy y u vz z u v
con1 1
0 2 2
0 3 3
+ ⋅= + ⋅ + ⋅= + ⋅ + ⋅
∈β
α βα β
α β, R
Por tanto:Son las ecuaciones paramétricas delplano . Π ( , , )A r ru vα y β se denominan paramétros, por loque las ecuaciones paramétricas de unplano, dependen de dos paránmetros. Para cada valor de α y β , obtenemos unpunto del plano.
r r r rx a u v= + + ∈α β α β, R
( , , ) ( , , ) ( , , ) ( , , ),
x y z x y z u u u v v vcon
= + +∈
0 0 0 1 2 3 1 2 3α βα β R
x x u vy y u vz z u v
= + ⋅ + ⋅= + ⋅ + ⋅= + ⋅ + ⋅
∈0 1 1
0 2 2
0 3 3
α βα βα β
α β, R

Matemáticas de 2º de bachillerato Página 78 El Espacio Afín
De las ecuaciones paramétricas obtendremos la ecuación general del plano. Veamos:X(x, y, z) es un punto del espacio, es decir, X0EPuede ocurrir que X0Π o XóΠ
X A R
M M
( , , ) ( , , ) ,
& ( , ) : &
( ) ( *
x y z u vx x u vy y u vz z u v
El sistema de tres
ecuaciones con dos incognitas Su v x xu v y yu v z z
tiene solucion
Rango Matriz coeficientes Rango Matriz ampliada
∈ ⇔ ∃ ∈= + += + += + +
⇔
+ = −+ = −+ = −
⇔
⇔ =
Π r r α βα βα βα β
α βα βα βα β
0 1 1
0 2 2
0 3 3
1 1 0
2 2 0
3 3 0
)
(
)
( , , , )
*
*
⇔
⇔
=−−−
⇔ = =
⇔ =−−−
= ⇔
⇔ + + + = ∈
Rangou vu vu v
Rangou v x xu v y yu v z z
Rango ya que Rango
por ser los vectores u y v linealmente independientesu v x xu v y yu v z z
Desarrollando A x B y C z D A B C D
1 1
2 2
3 3
1 1 0
2 2 0
3 3 0
1 1 0
2 2 0
3 3 0
2 2
0
0
M M
M
R
r r
En definitiva, la ecuación general de un plano se obtiene al desarrollar e igualar a cero eldeterminante de una matriz 3×3 en la que las dos primeras columnas son los vectores y
r ru y vla tercera es obtiene de restar a las coordenadas de un punto genérico X(x, y, z) del plano, lascoordenadas del punto A(x0, y0, z0).
Al final obtenemos:
Ecuación general del plano
En este caso: X( , , )a b c A a B b C c D∈ ⇔ ⋅ + ⋅ + ⋅ + =Π 0
Analicemos el determinate de donde se obtiene la ecuación general:
u v x xu v y yu v z z
siendo las columnasu u u uv v v v
x x y y z z
1 1 0
2 2 0
3 3 0
1 2 3
1 2 3
0 0 0
0−−−
===
= − − −
→
r
r( , , )( , , )
( , , )AX
lo que significa que la tercera columna es combinación lineal de las dos primeras, esto es, el
vector es combinación lineal de los vectores , esto es, los tres vectores estánAX → r ru y v
situados en el mismo plano (el plano Π ).
A x B y C z D+ + + = 0

Matemáticas de 2º de bachillerato Página 79 El Espacio Afín
Esto nos permite ver de otra forma si un punto X0Π o XóΠ. Veamos:
X A estan( , , ) ( , , ) & , &
,
x y z u v esta en el plano u y v en
u y v son linealmente dependientes Rangox x y y z z
u u uv v v
x x y y z zu u uv v v
∈ ⇔ ⇔ ⇔
⇔ ⇔− − −
= ⇔
⇔− − −
=
→ →
→
Π Π Πr r r r
r r
AX AX
AX
0 0 0
1 2 3
1 2 3
0 0 0
1 2 3
1 2 3
2
0
Ejemplo 43.-Consideremos un sistema de referencia ortonormal { }R O i j k= ; , ,
r r r
Sean el punto A(4,3,4) y los vectores r r r r r r r ru i j k y v i j k= + − = + +2 3 2
Queremos lo siguiente:a) ¿Determina el punto A y los vectores un plano?
r ru y vb) En caso afirmativo, halla la ecuación vectorial.c) Halla las ecuaciones paramétricas.d) Halla la ecuación general.
Veamos:Dibujemos (un esquema) el sistema de referencia, el punto A, los vectores y el plano.
r ru y v
a) Gráficamente se apreciaque es un plano,Π ( , , )A r ru vya que los vectores son
r ru y vlinealmente independientes.
No obstante vamos averlo algebraicamente:
Rango u y v
son linealmenteindependientes
u v es un plano
2 3 11 1 2
2−
= ⇒
⇒
r r
r rΠ ( , , ) .A
b) Ecuación vectorial:X (x, y, z) es un punto
es el vector derx x y z= ( , , )
posición de X.Veamos que debe cumplir elpunto X para estar en Π :

Matemáticas de 2º de bachillerato Página 80 El Espacio Afín
X A( , , ) ( , , )x y z u v x a x a u v∈ ⇔ = + ⇔ = + +→
Π r r r r r r r rAX
α βSubstituyendo:
Ecuación vectorial de Π ( , , )A r ru v
c) De la ecuación vectorial obtenemos las ecuaciones paramétricas:( , , ) ( , , ) ( , , ) ( , , )( , , ) ( , , ) ( , , ) ( , , )( , , ) ( , , ) ( , , )( , , ) ( , , )
x y zx y zx y zx y z
= + − += + ⋅ ⋅ − + ⋅= + ⋅ + ⋅ + − + ⋅= + + + + − +
4 3 4 2 3 1 1 1 24 3 4 2 3 24 3 4 2 3 24 2 3 3 4 2
α βα α α β β βα β α β α β
α β α β α βDeducimos que:
Ecuaciones paramétricas del plano Π ( , , )A r ru vα y β son los parámetros y para cada par de valores quedemos a los parámetros, obtenemos un punto del plano.
d) Ecuación general:
X A R( , , ) ( , , ) , :x y z u vxy
zS El sistema S es compatible
Rango Rangoxyz
Rangoxyz
xy
∈ ⇔ ∃ ∈+ = −
+ = −− + = −
⇔ ⇔
−
=−−
− −
⇔−−
− −
= ⇔−−
Π r r α βα βα βα β
2 43 3
2 4
2 13 11 2
2 1 43 1 31 2 4
2 1 43 1 31 2 4
22 1 43 1 31 2 4
0− −
=z
Desarrollemos el determinate e igualemos a cero:
2 1 43 1 31 2 4
2 4 6 4 3 4 4 3 3 4
2 8 6 24 3 4 4 12 3 127 5 9 0
xyz
z x y x y z
z x y x y zx y z
−−
− −= − + − − − + − − − − − =
= − + − − + + − − + − + == − − − =
( ) ( ) ( ) ( ) ( ) ( )
Por tanto:Ecuación general del plano Π ( , , )A r ru vQuede claro que:X( , , )x y z x y z∈ ⇔ − − − =Π 7 5 9 0
( , , ) ( , , ) ( , , ) ( , , ),
x y zcon
= + − +∈
4 3 4 2 3 1 1 1 2α βα β R
xyz
= + += + += − +
∈4 23 34 2
α βα β
α βα β, R
7 5 9 0x y z− − − =
Matemáticas de 2º de bachillerato Página 81 El Espacio Afín
Ejemplo 44.-Consideremos el mismo plano del ejemplo anterior (ejemplo 43). Queremos:a) Hallar tres puntos de ese plano.b) ¿Está el punto P (&4, &10, 13 ) en ese plano?c) ¿Está el punto Q (5, &8, 16 ) en ese plano?d) Hallar el corte de ese plano con el eje Z.
Veamos:a) Vamos a obtener dos de ellos de las ecuaciones paramétricas y el tercero de la general:
Paraxyz
B
Paraxyz
C
αβ
αβ
==
⇒
===
⇒ ∈
= −= −
⇒
== −=
⇒ − ∈
01
546
5 4 6
11
11
31 1 3
( , , )
( , , )
Π
Π
De la ecuación general:
Paraxy
z z D==
⇒ ⋅ − ⋅ − − = ⇒ = − ⇒ − ∈01
7 0 5 1 9 0 14 0 1 14( , , ) Π
Ya tenemos tres punto B, C y D del plano .Π ( , , )A r ru v
b) ¿ P (&4, &10, 13 ) 0 Π ?Vamos a comprobarlo con la ecuación general :
P
P( , , ) ( ) ( )
( , , )− − ∈ ⇔ ⋅ − − ⋅ − − − =
− + − − = − = ⇒ − − − ∈4 19 13 7 4 5 10 13 9 0
28 50 13 9 22 22 0 4 10 13Π
ΠLa respuesta es sí.
c) ¿ Q (5, &8, 16 ) 0 Π ?Q
Q( , , ) ( )
( , , )5 8 16 7 5 5 8 16 9 0
35 40 16 9 75 25 50 0 5 8 16− ∈ ⇔ ⋅ − ⋅ − − − =
+ − − = − = ≠ ⇒ − ∉Π
ΠLa respuesta es no.
d) El plano Π cortará ( o no) al eje Z en un punto de la forma V (0, 0, z ).Substituyendo x = 0 e y = 0 en la ecuación general:xy
z z V==
⇒ ⋅ − ⋅ − − = ⇒ = − ⇒ −
00
7 0 5 0 9 0 9 0 0 9( , , )
El plano Π corta al eje Z en el punto V (0, 0, -9)
Ejemplo 45.-En un sistema de referencia ortonormal, la ecuación general de un plano es:
Π : 2 5 4 2 0x y z+ − + =Pretendemos lo siguiente:

Matemáticas de 2º de bachillerato Página 82 El Espacio Afín
a) Encontrar sus ecuaciones paramétricas.b) Un punto y A y dos vectores que determinen dicho plano.
r ru y vc) Un vector libre (distinto de ) que pueda situarse en el plano Π.
r ru y vd) Hallar el punto de corte del plano con el eje X.
Veamos:a) De la ecuación general podemos obtener las paramétricas. Para ello, despejamos la
variable x:2 5 4 2 0
2 2 5 4 1 252
x y z
x y z x y z
+ − + =
= − − + ⇒ = − − +Llamado y = α y z = β (parámetros), tenemos :
x
yz
con o mejor
x
yz
= − − +
= + += + +
∈
= − − +
==
1 2
0 1 00 0 1
1 252
52α β
α βα β
α βα β
αβ
, R
Ecuaciones paramétricas del plano Π.Estas ecuaciones paramétricas nos da un puntoA(-1, 0 , 0 ) y dos vectores del plano ( oparalelos al plano):
( ) ( )r ru y v= − =52 1 0 2 0 1, , , ,
b) Según el apartado anterior:
c) Cualquier combinación lineal de es un vector libre que puede situarse en Π.r ru y v
( ) ( )r r r
r r r rw u v
w i j k nos sirve como vector pedido
= + = − + = − + = −
= − + +
2 2 1 0 2 0 1 5 2 0 2 0 1 3 2 1
3 2
52 , , , , ( , , ) ( , , ) ( , , )
.
d) El plano Π cortará al eje X en un punto del tipo M( x , 0 , 0 ) :
Parayz x x M punto pedido
==
⇒ + − + = ⇒ = − ⇒ −
00 2 0 0 2 0 1 1 0 0( , , )
x
yz
= − − +
==
∈
1 252 α β
αβ
α β, R
( ) ( )A un punto de
u y v dos vectores de o paralelos a
( , , )
, , , , ( )
−
= − =
1 0 0
1 0 2 0 152
Π
Π Πr r
M corte de con el eje X( , , ) .−1 0 0 Π

Matemáticas de 2º de bachillerato Página 83 El Espacio Afín
39.Plano determinado por tres punto. Ecuaciones.-‘ Supongamos un sistema de referencia del Espacio Afín.{ }R O u u u= ; , ,r r r
1 2 3‘ Supongamos tres puntos del espacio: A B C( , , ) ; ( , , ) ( , , )x y z x y z y x y z0 0 0 1 1 1 2 2 2‘ Si los tres puntos están alineados ( hay una recta que contiene a los tres puntos ),
entonces existen infinitos planos que contiene a esa recta y, por tanto, a los tres puntos.A esos infinitos planos se les denomina haz de planos generado por esa recta.Gráficamente:
En la figura 70 hemosdibujado los puntos A, B,C, la recta que loscontiene y cuatro (trozosde plano) de los infinitosplanos que forman el hazdeterminado por la rectaque contiene a dichospuntos.
‘ Si los tres puntos no están alineados, es decir, no existe una recta que los contenga,entonces existe un único plano que contiene a dichos puntos, es decir, los tres puntosdeterminan un plano. Se expresa:
Π (A, B, C) 6 Plano determinado por los puntos A, B y C.Gráficamente:
En la figura 71 hemosdibujado el plano Π (A,B,C) ylos puntos que los determinan.
Debe apreciarse que ese planoes único, esto es, no existeotro plano que contenga a lospuntos A, B y C.
‘ Nos planteamos ahora lasiguiente cuestión: ¿Qué condición o condiciones debe cumplir un punto X(x, y, z) del espacio para que seencuentre situado en el plano Π (A,B,C) ?Pues bien, encontrar esta o estas condiciones es encontrar la o las ecuaciones quedeterminan a dicho plano.
Veamos:Comenzaremos por realizar un dibujo genérico del problema, es decir, tres puntos del
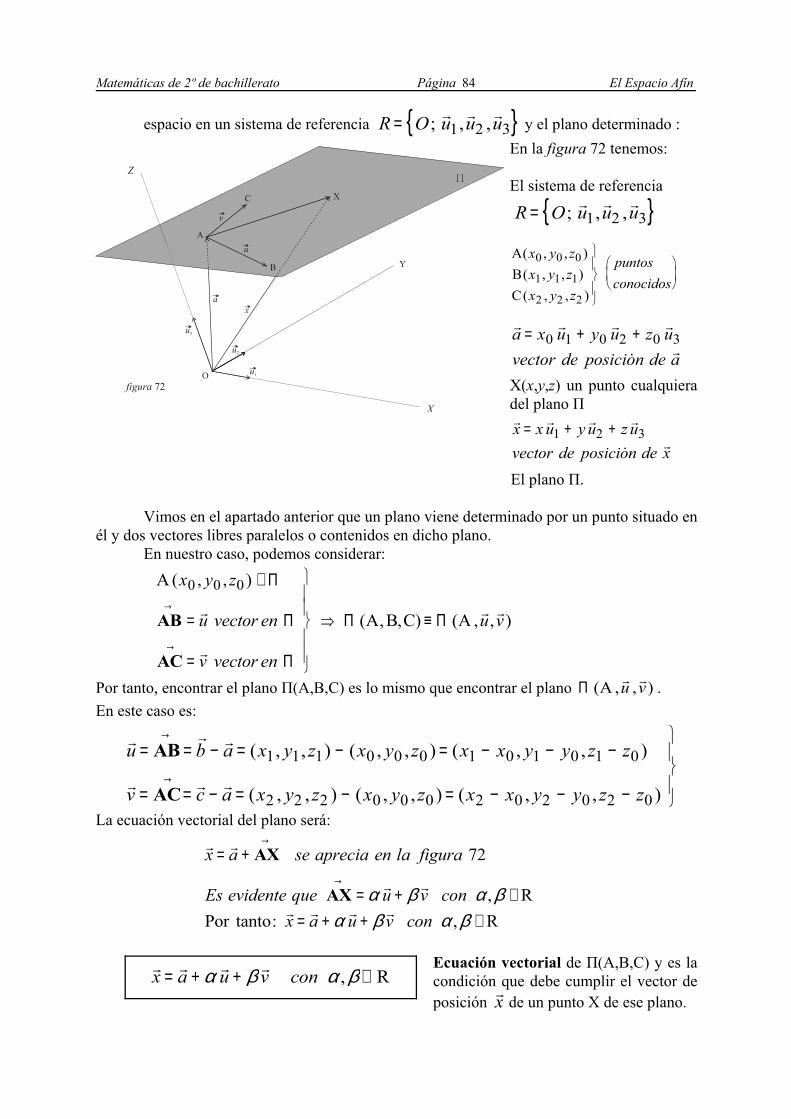
Matemáticas de 2º de bachillerato Página 84 El Espacio Afín
espacio en un sistema de referencia y el plano determinado :{ }R O u u u= ; , ,r r r1 2 3
En la figura 72 tenemos:
El sistema de referencia
{ }R O u u u= ; , ,r r r1 2 3
ABC
( , , )( , , )( , , )
x y zx y zx y z
puntosconocidos
0 0 0
1 1 1
2 2 2
r r r r
ra x u y u z uvector de posicion de a
= + +0 1 0 2 0 3&
X(x,y,z) un punto cualquieradel plano Πr r r r
rx x u y u z uvector de posicion de x
= + +1 2 3&
El plano Π.
Vimos en el apartado anterior que un plano viene determinado por un punto situado enél y dos vectores libres paralelos o contenidos en dicho plano.
En nuestro caso, podemos considerar:
A
A B C A
( , , )
( , , ) ( , , )
x y z
u vector en
v vector en
u v
0 0 0 ∈
=
=
⇒ ≡→
→
Π
Π
Π
Π ΠAB
AC
r
r
r r
Por tanto, encontrar el plano Π(A,B,C) es lo mismo que encontrar el plano .Π ( , , )A r ru vEn este caso es:
r r r
r r r
u b a x y z x y z x x y y z z
v c a x y z x y z x x y y z z
= = − = − = − − −
= = − = − = − − −
→
→
AB
AC
( , , ) ( , , ) ( , , )
( , , ) ( , , ) ( , , )
1 1 1 0 0 0 1 0 1 0 1 0
2 2 2 0 0 0 2 0 2 0 2 0La ecuación vectorial del plano será:
r r
r r
r r r r
x a se aprecia en la figura
Es evidente que u v conx a u v con
= +
= + ∈= + + ∈
→
→
AX
AX
72
α β α βα β α β
,,
RPor tanto: R
Ecuación vectorial de Π(A,B,C) y es lacondición que debe cumplir el vector deposición de un punto X de ese plano.
rx
r r r rx a u v con= + + ∈α β α β, R

Matemáticas de 2º de bachillerato Página 85 El Espacio Afín
( , , ) ( , , ) ( , , ) ( , , )( , , ) ( , , ) ( ( ), ( ), ( )) ( ( ), ( ), ( ))( , , ) ( ( ) (
x y z x y z x x y y z z x x y y z zx y z x y z x x y y z z x x y y z zx y z x x x
= + − − − + − − −= + − − − + − − −= + − +
0 0 0 1 0 1 0 1 0 2 0 2 0 2 0
0 0 0 1 0 1 0 1 0 2 0 2 0 2 0
0 1 0
α βα α α β β β
α β x x y y y y y z z z z z2 0 0 1 0 2 0 0 1 0 2 0− + − + − + − + −), ( ) ( ), ( ) ( ) )α β α β
Substituyendo los vectores libres pos sus expresiones como vectores de ú3(ú) :
r r r r r
r r r r r
r r r r r
r r r r
x x u y u z u x x y za x u y u z u a x y zu x x u y y u z z u u x x y y z zv x x u y y u z z
= + + == + + == − + − + − = − − −= − + − + −
1 2 3
0 1 0 2 0 3 0 0 0
1 0 1 1 0 2 1 0 3 1 0 1 0 1 0
2 0 1 2 0 2 2 0
; ( , , ); ( , , )
( ) ( ) ( ) ; ( , , )( ) ( ) ( ) u v x x y y z z
respecto del sistema R
x y z x y z x x y y z z x x y y z z con3 2 0 2 0 2 0
0 0 0 1 0 1 0 1 0 2 0 2 0 2 0
; ( , , )( , , ) ( , , ) ( , , ) ( , , ) ,
r = − − −
= + − − − + − − − ∈α α β R
Por tanto, la forma o ecuación vectorial del plano Π(A,B,C) es:
De la ecuación vectorial obtenemos las ecuaciones paramétricas:
De la última igualdad deducimos:
Ecuaciones paramétricas delplano Π(A,B,C).
Para cada par de valoresα, β obtenemos un punto del plano.
De las ecuaciones paramétricas obtendremos la ecuación general. Veamos como:Sea X(x, y, z) un punto del espacio, es decir, X0E. Puede ocurrir que X0Π(A,B,C) o que XóΠ(A,B,C). Veamos que ocurre en el caso que X0Π(A,B,C) :
X R( , , ) ,( ) ( )( ) ( )( ) ( )
& :( ) ( )( ) ( )(
x y zx x x x x xy y y y y yz z z z z z
El sistema de ecuaciones
con incognitas Sx x x x x xy y y y y yz z
∈ ⇔ ∃ ∈= + − + −= + − + −= + − + −
⇔
− + − = −− + − = −−
Π α βα βα βα β
α βα β
0 1 0 2 0
0 1 0 2 0
0 1 0 2 0
1 0 2 0 0
1 0 2 0 0
1
3
2
0 2 0 0
1 0 2 0
1 0 2 0
1 0 2 0
1 0 2 0 0
1 0 2 0 0
1 0 2 0 0
) ( )& ( )
*
α βα β
+ − = −
⇔
⇔− −− −− −
=− − −− − −− − −
z z z ztiene solucion existe y
Rangox x x xy y y yz z z z
Rangox x x x x xy y y y y yz z z z z z
M M1 2444 3444 1 244444 344444
⇔
⇔ = =Rango M ya que Rango M* ( )2 2
( , , ) ( , , ) ( , , ) ( , , ),
x y z x y z x x y y z z x x y y z zcon
= + − − − + − − −∈
0 0 0 1 0 1 0 1 0 2 0 2 0 2 0α βα β R
x x x x x xy y y y y yz z z z z z
= + − + −= + − + −= + − + −
∈0 1 0 2 0
0 1 0 2 0
0 1 0 2 0
α βα βα β
α β( ) ( )( ) ( )( ) ( )
, R

Matemáticas de 2º de bachillerato Página 86 El Espacio Afín
Ahora bien:
Rangox x x x x xy y y y y yz z z z z z
x x x x x xy y y y y yz z z z z z
1 0 2 0 0
1 0 2 0 0
1 0 2 0 0
1 0 2 0 0
1 0 2 0 0
1 0 2 0 0
2 0− − −− − −− − −
= ⇔− − −− − −− − −
=
Por tanto:
Ecuación generald e l p l a n odeterminado por lospunto A, B y C,Π(A,B,C)
Es decir: X(x, y, z) 0Π(A,B,C) ] A x + B y + C z + D = 0
El determinate anterior que nos permite obtener la ecuación general del plano, podemosmodificarlo (haciendo un cambio de posición de filas y columnas) y, por las propiedades de losdeterminantes :
Hemos puesto latercera columna deldeterminante anteriorcomo primera fila deeste.La posición de lasfilas y columnaspuede ser cualquiera,y a q u e e lde te rminante seiguala a cero.
Otro razonamiento para deducir la ecuación general del plano Π(A,B,C), es el siguiente:
X determinado( , , ) ( , , ) &
,
x y z A B C esta situado en el plano por y
y son linealmente dependientes Rangox x x x x xy y y y y yz z z z z z
x x x x x
∈ ⇔ ⇔
⇔ ⇔− − −− − −− − −
= ⇔
⇔− − −
→ → →
→ → →
→ → →
Π AX AB AC
AX AB AC
AB AC AX
1 0 2 0 0
1 0 2 0 0
1 0 2 0 0
1 0 2 0
2
1 244444 344444
xy y y y y yz z z z z z
A x B y C z D0
1 0 2 0 0
1 0 2 0 0
0 0− − −− − −
= ⇔ + + + =
Notese que conociendo tres puntos A(x0, y0, z0) , B(x1, y1, z1) y C(x2, y2, z2) de un plano,podemos directamente obtener su ecuación general a través de un determinante.
x x x x x xy y y y y yz z z z z z
A x B y C z D1 0 2 0 0
1 0 2 0 0
1 0 2 0 0
0− − −− − −− − −
= + + + =
x x y y z zx x y y z zx x y y z z
A x B y C z D− − −− − −− − −
= + + + =0 0 0
1 0 1 0 1 0
2 0 2 0 2 0
0

Matemáticas de 2º de bachillerato Página 87 El Espacio Afín
Ejemplo 46.-Sean los puntos del espacio A(2, &5, 0) , B(&1, 1, 4) y C(5, 2,&2) respecto de un sistema
de referencia ortonormal. Pedimos:a) Comprueba que esos puntos determinan un plano.b) Halla sus distintas ecuaciones.c) Halla un vector libre del espacio cuya dirección sea paralela (o esté contenida) en
ese plano.d) Halla un vector libre cuya dirección no sea paralela a ese plano.
Veamos:a) Sabemos que un punto del espacio y dos vectores libres linealmente independientes,
determina un plano. También sabemos que tres puntos del espacio determinan un planosi no están alineados (situados en la misma recta).
Considerando que AB
AC
→
→
= − = − − − = −
= − = − − − = −
r r
r r
b a
b c
( , , ) ( , , ) ( , , )
( , , ) ( , , ) ( , , )
1 1 4 2 5 0 3 6 4
5 2 2 2 5 0 3 7 2es fácil apreciar que:
A B C estan( , , ) , ( , , ) , ( , , ) &2 5 0 1 1 4 5 2 23 6 4
3 7 2 2
− − − ⇔ ⇔
⇔ ⇔−
−
=
→ →
→ →
no alineados y no son paralelos
y son linelamente independientes Rango
AB AC
AB AC
Hallemos el rango y tomemos un decisión:
M Rango es un plano23 6
3 739 0
3 6 43 7 2
2=−
= − ≠ ⇒−
−
= ⇒ Π ( , , )A B C
b) Podemos considerar que :
Π Π( , , ) ( , , )( , , )
( , , )( , , )
A B C AA
≡−
= −= −
r r r
ru v siendo u
v
2 5 03 6 43 7 2
Siendo X(x,y,z) unpunto cualquieradel plano y su
rxvector de posición.
es el vector dera
posición de A.
De la ecuación vectorial obtenemos las ecuaciones paramétricas:
( , , ) ( , , ) ( , , ) ( , , )x y z = − + − + − ⇒2 5 0 3 6 4 3 7 2α β
r r r rx a u vx y z= + +
= − + − + −
∈α β
α β α β( , , ) ( , , ) ( , , ) ( , , ) ,2 5 0 3 6 4 3 7 2 R
Ecuación vectorial del plano Π(A, B, C)
xyz
= − += − + += + −
∈2 3 3
5 6 70 4 2
α βα β
α βα β, R

Matemáticas de 2º de bachillerato Página 88 El Espacio Afín
x x y y z zx x y y z zx x y y z z
x y z x y z− − −− − −− − −
=− + −
− − + −− + − −
=− +
−−
=0 0 0
1 0 1 0 1 0
2 0 2 0 2 0
2 5 01 2 1 5 4 0
5 2 2 5 2 0
2 53 6 4
3 7 20
La ecuación general la obtendremos mediante el determinante siguiente:
Desarrollando:− − − + + − − − − + =− + − + + − − + − − =− + − + =
− − + − =
12 2 21 12 5 18 28 2 6 5 012 24 21 12 60 18 28 56 6 30 040 6 39 110 0
1 40 6 39 110 0
( ) ( ) ( ) ( )
.:
x z y z x yx z y z x yx y z
Multiplicando por x y z
Ecuación general del plano Π(A, B, C)
c) Cualquier vector que sea combinación lineal de los vectores tiener ru y v= =→ →
AB AC
como dirección una recta que es paralela al plano Π(A, B, C).Por tanto:
r r rw u v= + = − + − =( , , ) ( , , ) ( , , )3 6 4 3 7 2 0 13 2
d) Cualquier vector que no sea combinación lineal de es válido.rm r ru y v
Tomemos r r rm i es decir i= =, , ( , , )1 0 0
−
− = + − − − − = − ≠ ⇒3 6 4
3 7 21 0 0
0 0 12 28 0 0 40 0 r r ru v i son linealmente independientes, ,
Por tanto:
40.Condición para que cuatro puntos sean coplanarios.-L Sea un sistema de referencia del Espacio Afín.{ }R O u u u= ; , ,r r r
1 2 3L Sean cuatros puntos del espacio: A(x0, y0, z0) , B(x1, y1, z1) , C(x2, y2, z2) , D(x3, y3, z3).L Puede ocurrir alguna de las dos situaciones siguientes:
40 6 39 110 0x y z− + − =
r r r
rw j kw
Vector paralelo a= +=
13 20 13 2( , , )
( , , )Π A B C
rinos sirve como vector pedido
= ( , , )1 0 0
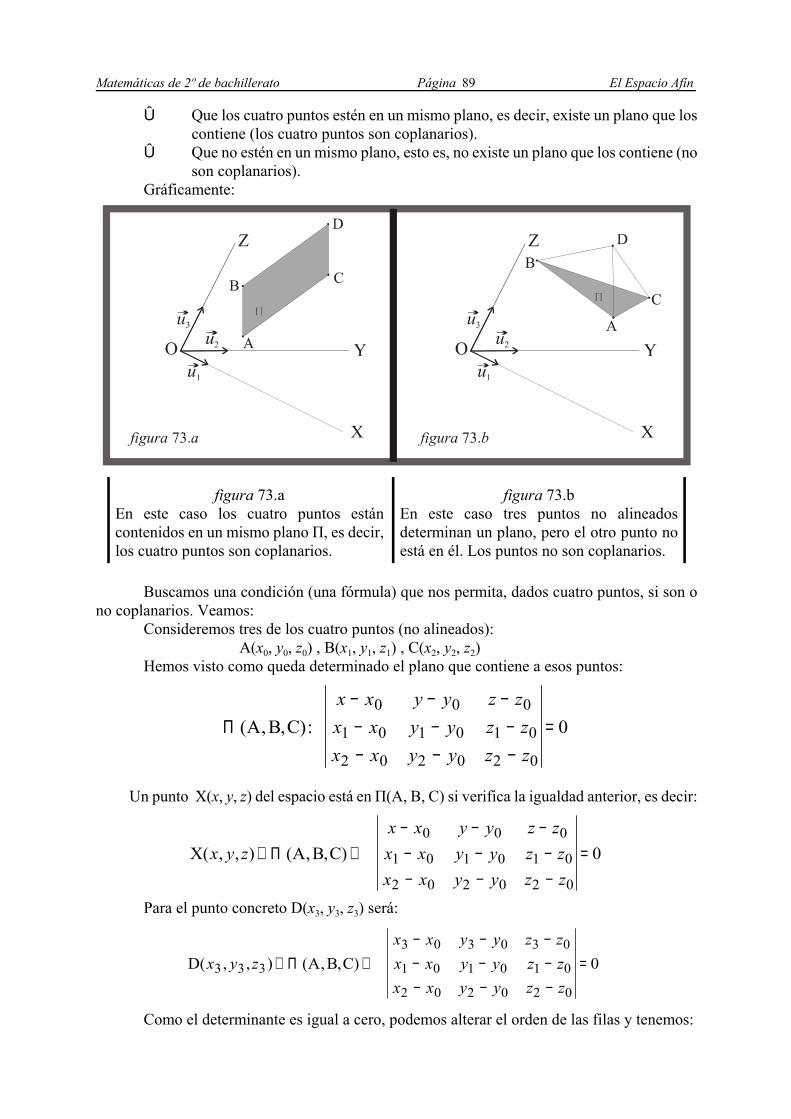
Matemáticas de 2º de bachillerato Página 89 El Espacio Afín
Π ( , , ):A B Cx x y y z zx x y y z zx x y y z z
− − −− − −− − −
=0 0 0
1 0 1 0 1 0
2 0 2 0 2 0
0
X A B C( , , ) ( , , )x y zx x y y z zx x y y z zx x y y z z
∈ ⇔− − −− − −− − −
=Π0 0 0
1 0 1 0 1 0
2 0 2 0 2 0
0
D A B C( , , ) ( , , )x y zx x y y z zx x y y z zx x y y z z
3 3 3
3 0 3 0 3 0
1 0 1 0 1 0
2 0 2 0 2 0
0∈ ⇔− − −− − −− − −
=Π
º Que los cuatro puntos estén en un mismo plano, es decir, existe un plano que loscontiene (los cuatro puntos son coplanarios).
º Que no estén en un mismo plano, esto es, no existe un plano que los contiene (noson coplanarios).
Gráficamente:
figura 73.aEn este caso los cuatro puntos estáncontenidos en un mismo plano Π, es decir,los cuatro puntos son coplanarios.
figura 73.bEn este caso tres puntos no alineadosdeterminan un plano, pero el otro punto noestá en él. Los puntos no son coplanarios.
Buscamos una condición (una fórmula) que nos permita, dados cuatro puntos, si son ono coplanarios. Veamos:
Consideremos tres de los cuatro puntos (no alineados): A(x0, y0, z0) , B(x1, y1, z1) , C(x2, y2, z2)
Hemos visto como queda determinado el plano que contiene a esos puntos:
Un punto X(x, y, z) del espacio está en Π(A, B, C) si verifica la igualdad anterior, es decir:
Para el punto concreto D(x3, y3, z3) será:
Como el determinante es igual a cero, podemos alterar el orden de las filas y tenemos:

Matemáticas de 2º de bachillerato Página 90 El Espacio Afín
ABCD
( , , ) ( , , )( , , ) ( , , )( , , ) ( , , )( , , ) ( , , )
x y zx y zx y zx y z
son coplanarios
0 0 0
1 1 1
2 2 2
3 3 3
2 1 54 1 30 1 11 2 5
4 2 1 1 3 50 2 1 1 1 51 2 2 1 5 5
0
= −= −= −= −
⇔− + − −− + − −− + − −
=
Quede claro que si el determinante anterior es distinto de cero, los cuatro puntos no soncoplanarios.
Puede ocurrir que tres de los cuatro puntos estén alineados (están situados en una recta)y el cuarto está fuera de ella. En este caso, también existe un plano que contiene a los cuatropuntos.
Ejemplo 47.-Sean los cuatro puntos siguientes: A(2, &1, 5) , B(4, 1, &3) , C(0, 1, &1) y D(1, 2, &5).Queremos saber si están contenidos en un mismo plano.
Veamos:
Hallemos el valor del determinante:2 2 82 2 61 3 10
40 48 12 16 36 40 96 96 0−
− −− −
= − + + − + − = − =
Conclusión: Los cuatro puntos dados están en un mismo plano.
Ejemplo 48.-Dados los puntos del espacio A(3, &2, 1) , B(4, 0, 5) y C(&3, 1, 2), hallar el valor de m
para que el punto D(4, &5, m) esté situado en el mismo plano que A, B y C.Veamos:Proponemos dos formas de actuación:Î Vemos si los puntos A, B y C no están alineados y si esto ocurre, hallamos la
ecuación del plano determinado por ellos, esto es, Π(A, B, C). Posteriormentesubstituimos los valores x = 4, y = &5 , z = m en esa ecuación y obtenemos elvalor de m.
Ï Utilizamos la expresión vista anteriormente para que cuatro puntos seancoplanarios.
Lo haremos por el segundo método:A B( , , ) ( , , ) ; ( , , ) ( , , )
( , , ) ( , , ) ; ( , , ) ( , , )3 2 1 4 0 5
3 1 2 4 50 0 0 1 1 1
2 2 2 3 3 3
− = =− = − =
x y z x y zC x y z D m x y z
ABCD
( , , )( , , )( , , )( , , )
x y zx y zx y zx y z
son coplanariosx x y y z zx x y y z zx x y y z z
0 0 0
1 1 1
2 2 2
3 3 3
1 0 1 0 1 0
2 0 2 0 2 0
3 0 3 0 3 0
0
⇔− − −− − −− − −
=
Condición que deben cumplir cuatro puntos A, B, C y D para estar en el mismo plano

Matemáticas de 2º de bachillerato Página 91 El Espacio Afín
ABCD
( , , ) ( , , )( , , ) ( , , )( , , ) ( , , )( , , ) ( , , )
x y zx y zx y zx y z m
son coplanariosm
0 0 0
1 1 1
2 2 2
3 3 3
3 2 14 0 5
3 1 24 5
4 3 0 2 5 13 3 1 2 2 1
4 3 5 2 10
= −== −= −
⇔− + −
− − + −− − + −
=
Desarrollemos el determinante e igualemos a cero:
1 2 46 3 1
1 3 13 1 72 2 12 3 12 1 3 3 65 12 12 0
15 50 5015
103
−− −
= − + + − + + − = − + + − =
= − ⇒ = =− −
mm m m m
m m
( ) ( )
41.Plano determinado por una recta y un punto exterior a ella.-
T Sea r una recta del Espacio Afín.T Sea P un punto del espacio que no está en la recta r, es decir, un punto exterior a r.
Podemos expresar como Pór.T Es fácil ver que sólo hay un plano del espacio que contenga a la recta r y al punto P.
Diremos entonces que una recta del espacio y un punto exterior a ella determinan unplano.
T Llamaremos Π(r, P) al plano determinado por la recta r y el punto P.Pues bien:
Pretendemos hallar las ecuaciones de ese plano (conociendo la recta r y el punto P). Paraello actuamos del siguiente modo:Î Hallamos un punto de r, es decir, A0r. Esto no debe representar ningún problema puesto
que tenemos determinada la recta.Ï Hallamos un vector direccional de r, es decir, . Esto tampoco debe representar un
rvproblema ya que este vector lo podemos sacar de cualquiera de las expresiones de larecta. Con esto ya sabemos que .r v( , )A r
Ð Consideramos el vector , siendo el vector de posición de P y elAP →
= − =r r rp a u rp ravector de posición de A. Este vector está perfectamente determinado puesto queconocemos los punto P y A.
Ñ Hallamos las ecuaciones del plano . Es evidente que Π ( , , )A r ru v Π Π( , , ) ( , )A Pr ru v r≡
Con esto tenemos determinado el plano que forman una recta y un punto exterior a ella.
Otra forma de actuar sería hallar dos punto cualesquiera de la recta r (A y B). Tenemosasí tres punto del plano, estos son A, B y P. Con tres puntos podemos determinar dicho plano,es decir, Π(A, B, P), que coincidirá con Π(r, P).
Si los puntos A, B, C y D están en el mismo plano.m= − 103

Matemáticas de 2º de bachillerato Página 92 El Espacio Afín
Gráficamente:En la figura 74 tenemos:Una recta r que vienedeterminada por un punto A yun vector direccional , es
rvdecir, r(A, ).
rvSi conocemos dos puntos A yB de la recta r, tambiéntenemos determinada esa recta,es decir, r(A,B). Nótese quer(A, )/r(A,B).
rvEl punto P es un punto delespacio exterior a la recta r.Puede apreciarse que existe unúnico plano que contiene a P ya r. Ese es el planodeterminado por el punto P y larecta r. Lo expresamos Π(r,P).Debe apreciarse que el plano Πtambién viene determinado porlos puntos A, B y P, esto es,Π(r,P)/Π(A,B,P).L o s v e c t o r e s
r ra y pcorresponden a los vectores deposición de los puntos A y P.
También hemos representado el vector , aunque podríamos haber representado . PA →
AP →
En cualquier caso:
Π Π Π Π( , , ) ( , , ) ( , , ) ( , , )P A B A P P≡ ≡ ≡→ → → →r rv vAP PA PA PB
Ejemplo 49-Sea la recta tal que A(1,&1,2) y . Sea el punto P(&2, 0, 5).r v( , )A r r r r r
v i j k= + − 3Pedimos:
a) Averiguar si la recta r y el punto P determinan un plano.b) En caso de que r y P determinen un plano, halla sus ecuaciones.
Veamos:a) Hallemos alguna de las ecuaciones de la recta r y comprobemos si el punto P está en ella.
Para que x y z r A v debe ser x a t v tx y z t
X R( , , ) = (1, -1,2) + t (1,1, - 3) R Ecuacion vectorial
( , , ) ( , )&
∈ = + ∈∈ →
r r s s
Operando en la ecuación vectorial:
x ty tz t
t= += − += −
∈ →1
12 3
R Ecuaciones parametricas&

Matemáticas de 2º de bachillerato Página 93 El Espacio Afín
Comprobemos si el punto P está en esa recta:
P A R( , , ) ( , )− ∈ ⇔ ∃ ∈− = +
= − += −
= −== −
2 0 52 10 15 2 3
31
1r v t
ttt
Deducimos quettt
r
Conclusión: El punto P(&2, 0, 5) no está en la recta .r v( , )A r
Podemos asegurar que r y P determinen un plano. Llamaremos Π(r, P).
b) Del plano Π conocemos un punto P(&2, 0, 5) y un vector contenido (o paralelo) en él,el vector . Si tuviésemos otro vector paralelo a Π, podríamos construir sus ecuaciones.rvConsideremos el vector siguiente:
PA→
= − = − − − = − − =r r ra p u es paralelo a( , , ) ( , , ) ( , , )1 1 2 2 0 5 3 1 3 ΠEs evidente que los vectores son linealmente independientes, ya que es unr ru y v rv
vector direccional de y no es paralelo a por ser .r v( , )A r ru =→PA
rv P A∉ r v( , )r
Por tanto:P
P( , , )
( , , )( , , )
( , , ) .−= − −= −
⇒
2 0 53 1 31 1 3
r
r
r ruv
u v es el plano buscadoΠ
X P R( , , ) ( , , ) ,( , , ) ( , , ) ( , , ) ( , , )( , , ) ( , , ) ( , , ) ( , , )( , , ) ( , , )
x y z u v x p x p u v conx y zx y zx y z
∈ ⇔ = + ⇔ = + + ∈= − + − − + −= − + − − + −= − + + − + − −
→Π r r r r r r r rPX α β α β
α βα α α β β β
α β α β α β
2 0 5 3 1 3 1 1 32 0 5 3 3 32 3 5 3 3
Igualandoxyz
con: , &
= − + += − += − −
∈ →2 3
5 3 3
α βα β
α βα β R Ecuaciones parametricas
De las paramétricas obtenemos la ecuación general:
3 1 21 13 3 5
03 5 3 2 3 3 2 9 5 03 15 3 6 3 3 6 9 5 06 6 4 8 0 3 3 2 4 0
xy
z
z x y x y zz x y x y zx y z Simplificando x y z
+−− − −
= ⇒− + + − + + + + − =
− + + − + + + + − =+ + − = + + − =
( ) ( ) ( )
.
Ecuación general del planodeterminado por la recta r y el punto P
Ejemplo 50.-
Dada la recta y el punto P (3, 20, 4), queremos hallar las ecuacionesry xz x
:= += −
4 82 6
del plano que determinan la recta r y el punto P (caso de que determinen un plano).
Π( , , ):P r ru v x y z3 3 2 4 0+ + − =

Matemáticas de 2º de bachillerato Página 94 El Espacio Afín
Veamos:. Primero comprobamos si el punto P está en r.
PP
( , , )( , , )
3 20 420 4 3 84 2 3 6 3 20 4
∈ ⇔= ⋅ + →
= ⋅ − → ⇒ ∉
rVerdadFalso r
Por tanto, Π(P, r) es un plano.. Hallemos las distintas ecuaciones de es plano:
Tenemos un punto de Π(P, r), el punto P. Busquemos otros dos. Dos puntos cualesquieraque estén en r no sirven como punto de Π(P, r).
xyz
xyz
= ⇒= ⋅ + == ⋅ − = −
⇒ − = ⇒= ⋅ + == ⋅ − = −
⇒ −04 0 8 82 0 6 6
0 8 6 14 1 8 122 1 6 4
1 12 4Q M( , , ) ( , , )
Por tanto: PQM
P Q M P Q M P( , , )( , , )( , , )
( , , ) ( , , ) ( , )3 20 40 8 61 12 4
−−
⇒ ≡Π Π Πsiendo r
Con los tres puntos podemos construir la ecuación general del plano que pasa por ellos:
x x y y z zx x y y z zx x y y z z
siendox y zx y zx y z
x y zx z y
− − −− − −− − −
=== −
= −
− − −− − −− − −
= ⇒ − + − + −
0 0 0
1 0 1 0 1 0
2 0 2 0 2 0
0 0 0
1 1 1
2 2 2
03 20 40 8 6
1 12 4
3 20 43 12 102 8 8
0 96 3 24 4 20 20
PQM
( , , ) ( , , )( , , ) ( , , )( , , ) ( , , )
( ) ( ) ( ) ( ) ( ) ( )− − − − − − =
− + = ⇒ − + =
24 4 80 3 24 20 0
16 4 32 0 4 8 0
z x y
x y x y
Ecuación general del plano determinadopor el punto P y la recta r.
De la ecuación general podemos obtener las ecuaciones paramétricas. Veamos:
Despejamos la variable de la ecuacion general:" " &
&
y y = x +
Consideramos como parametrosxz
xyz
4 80 1 08 4 00 0 1
==
⇒= + ⋅ + ⋅= + ⋅ + ⋅= + ⋅ + ⋅
αβ
α βα βα β
De las paramétricas podemos obtener la ecuación vectorial: X (x, y, z) 0Π(P, r) ⇔ = + + ∈( , , ) ( , , ) ( , , ) ( , , ) ,x y z con0 8 0 1 4 0 0 0 1α β α β RDe las paramétricas hemos obtenido A(0, 8,0) , r ru y v= =( , , ) ( , , )1 4 0 0 0 1
Π ( , ) :P r x y4 8 0− + =
Π ( , ) : &P rxyz
Ecuaciones parametricas== +=
αα
β8 4

Matemáticas de 2º de bachillerato Página 95 El Espacio Afín
42.Condición para que tres puntos del espacio estén alineados.-
Sea A(x0 , y0 , z0) , B(x1 , y1 , z1) y C(x2 , y2 , z2) tres puntos del espacio. Puede ocurrir alguna de las dos situaciones siguientes:
Ø Existe una recta que contiene a los tres puntos (los tres puntos están alineados).Ù No existe una recta que contiene a los tres puntos (los puntos no están alineados).
Buscamos la condición (o condiciones) que deben cumplir los tres puntos para que esténalineados.
Veamos:ABC
estan alineados R( , , )( , , )( , , )
& / /
( , , ) ( , , )
( , , ) ( ) , ( ) , (
x y zx y zx y z
t t
x x y y z z t x x y y z z
x x y y z z t x x t y y t
0 0 0
1 1 1
2 2 2
2 0 2 0 2 0 1 0 1 0 1 0
2 0 2 0 2 0 1 0 1 0
⇔ ⇔ ∃ ∈ = ⇔
⇔ − − − = − − − ⇔
⇔ − − − = − −
→ → → →AB AC AC AB
( )z z
tx x t x xy y t y yz z t z z
tx xx x
y yy y
z zz z
1 0
2 0 1 0
2 0 1 0
2 0 1 0
2 0
1 0
2 0
1 0
2 0
1 0
− ⇔
⇔ ∃ ∈− = −− = −− = −
⇔ =−−
=−−
=−−
)
( )( )
( )R
Por tanto:Esta es lacondición quedeben cumplirtres puntos delespacio paraestar alineados.
Otra forma de actuar para comprobar si tres puntos están alineados o no, es hallar laecuación de la recta que contiene a dos de los tres puntos y posteriormente comprobar si eltercero se encuentra o no en esa recta.
Ejemplo 51.-
Averiguar si los puntos están alineados.( ) ( )A B C52
12
92
83
1331 4 6 1, , , ( , , ) , ,− −y
Veamos:
( )
( )( ) ( ) ( ) ( )
A
B
C
estan alineados R
52
12
92
83
133
83
52
12
133
92
52
12
92
16
12
16
32
92
32
16
32
19
12
92
19
16
1 4 6
1
1 1 4 6
, ,
( , , )
, ,
& / /
, , , , , , , ,
−
−
⇔ ⇔ ∃ ∈ = ⇔
⇔ − − + − = − + − ⇔ − − = − ⇔
⇔
= − ⇒ = −
− = ⇒ = −
− =
→ → → →AB AC AC AB
t t
t t t t
t t
t t32
19t t⇒ = −
⇔ Los puntos estan alineados&
ABC
estan alineados ( , , )( , , )( , , )
&
x y zx y zx y z
x xx x
y yy y
z zz z
0 0 0
1 1 1
2 2 2
2 0
1 0
2 0
1 0
2 0
1 0
⇔−−
=−−
=−−
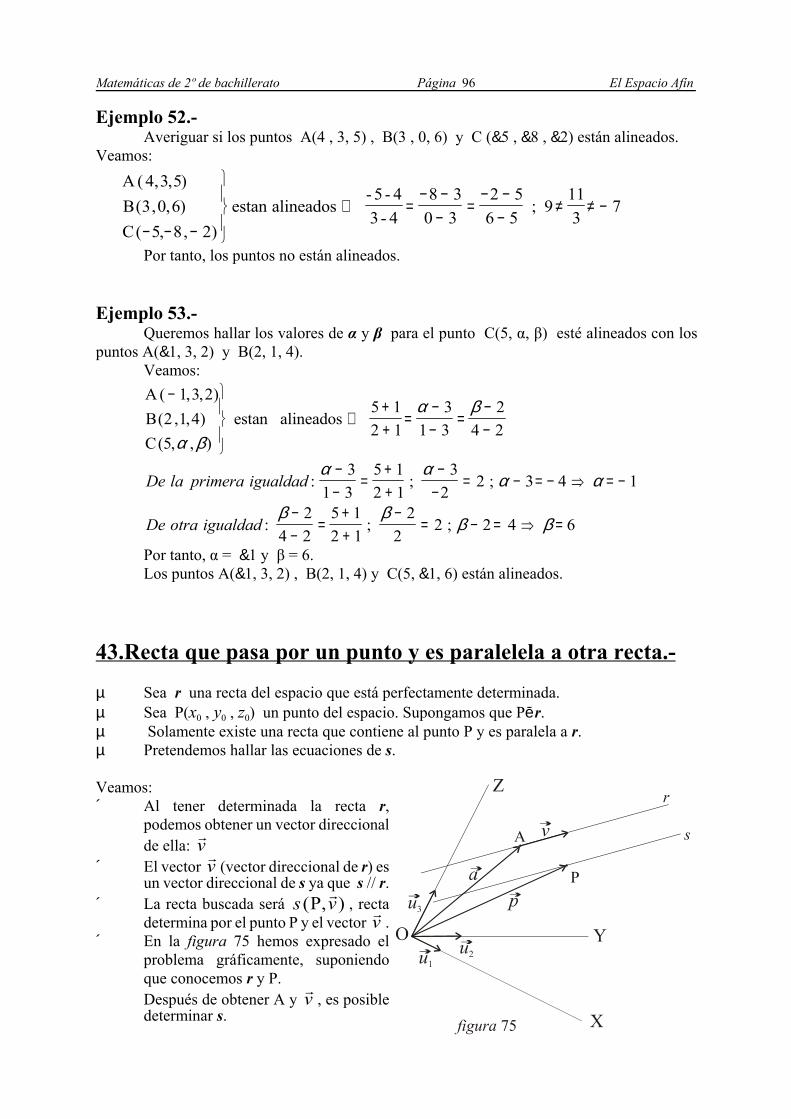
Matemáticas de 2º de bachillerato Página 96 El Espacio Afín
Ejemplo 52.-Averiguar si los puntos A(4 , 3, 5) , B(3 , 0, 6) y C (&5 , &8 , &2) están alineados.
Veamos:ABC
estan alineados- 5- 43- 4
( , , )( , , )( , , )
;4 3 53 0 6
5 8 2
8 30 3
2 56 5
9113
7− − −
⇔ =− −
−=
− −−
≠ ≠ −
Por tanto, los puntos no están alineados.
Ejemplo 53.-Queremos hallar los valores de α y β para el punto C(5, α, β) esté alineados con los
puntos A(&1, 3, 2) y B(2, 1, 4).Veamos:ABC
estan alineados( , , )( , , )( , , )
: ; ;
: ; ;
−
⇔++
=−−
=−−
−−
=++
−−
= − = − ⇒ = −
−−
=++
−= − = ⇒ =
1 3 22 1 45
5 12 1
31 3
24 2
31 3
5 12 1
32
2 3 4 1
24 2
5 12 1
22
2 2 4 6
α β
α β
α αα α
β ββ β
De la primera igualdad
De otra igualdad
Por tanto, α = &1 y β = 6.Los puntos A(&1, 3, 2) , B(2, 1, 4) y C(5, &1, 6) están alineados.
43.Recta que pasa por un punto y es paralelela a otra recta.-
” Sea r una recta del espacio que está perfectamente determinada.” Sea P(x0 , y0 , z0) un punto del espacio. Supongamos que Pór.” Solamente existe una recta que contiene al punto P y es paralela a r.” Pretendemos hallar las ecuaciones de s.
Veamos:“ Al tener determinada la recta r,
podemos obtener un vector direccionalde ella:
rv“ El vector (vector direccional de r) es
rvun vector direccional de s ya que s // r.
“ La recta buscada será , rectas v( , )P r
determina por el punto P y el vector .rv
“ En la figura 75 hemos expresado elproblema gráficamente, suponiendoque conocemos r y P.Después de obtener A y , es posible
rvdeterminar s.

Matemáticas de 2º de bachillerato Página 97 El Espacio Afín
Ejemplo 54.-
Dado el punto P(6, &3, 4) y la recta , buscamos la recta que pasa por elrx ty tz t
:= −= − += +
1 31
4 5punto P y es paralela a r.
Veamos:
De las ecuaciones paramétricas de r tenemos A ( , , ) .
( , , ) .1 1 4
3 1 5−
= −
punto de rv vector direccional de rr
Buscamos s v siendov
( , )( , , )
( , , )P
Prr
6 3 43 1 5
−= −
XR
( , , ) &
( , , ) ( , , ) ( , , )x y z r x p x p t v ecuacion vectorial
x y z t t∈ ⇔ = + ⇔ = +
= − + − ∈
→r r r r rPX6 3 4 3 1 5
Ecuación vectorial de la recta s v( , )P r
Operando en la vectorial obtenemos las ecuaciones paramétricas:
Ecuaciones paramétricas de s v( , )P r
De las paramétricas obtenemos las continuas, despejando t e igualando:
Ecuaciones continuas de s v( , )P r
De las continuas obtenemos las reducidas:
yx
z x
y x
z x
+ =−
−−
=−
−
⇒= − −
= − +
36
34
56
3
1
14
1353
Ecuaciones reducidas de respecto de la variable x.s v( , )P r
( , , ) ( , , ) ( , , )x y z t t= − + − ∈6 3 4 3 1 5 R
s vx ty tz t
t( , ) :P Rr= −= − += +
∈6 3
34 5
xy
z−−
= + =−6
33
45
y x
z x
= − −
= − +
1353
1
14