
UNIVERSIDAD PÚBLICA DE NAVARRA NAFARROAKO UNIBERTSITATE PUBLIKOA
DEPARTAMENTO DE INGENIERÍA MECÁNICA
ENERGÉTICA Y DE MATERIALES INGENIERITZA MEKANIKOA, ENERGETIKOA ETA
MATERIALEEN SAILA
SÍNTESIS CINEMÁTICA Y DINÁMICA DE MECANISMOS.
MANIPULADOR PARALELO 6-RKS
MEMORIA que para optar al Grado de Doctor Ingeniero Industrial
presenta ISIDRO ZABALZA VILLAVA
Dirigida por José Manuel Jiménez Bascones y Jesús María Pintor Borobia
Pamplona, diciembre de 1999


A la memoria de mi padre, a mi madre, a mis hermanos y hermanas,
sin cuya ayuda no habría llegado hasta este punto.
Nire emazte Feli eta nire alaba Arantxa eta Iratxeri hainbat ordu kendu dizuedanoi
tesi hau burutu ahal izateko.


AGRADECIMIENTOS
En primer lugar, a todos mis profesores desde los Estudios Primarios hasta los Cursos de Doctorado. En cuanto a la dirección de la tesis a: Alejo Avello Iturriagoitia, del Departamento de Mecánica Aplicada de la Universidad de Navarra, por la propuesta del tema y dirección inicial, José González Vián, del Departamento de Ingeniería Mecánica, Energética y de Materiales de la Universidad Pública de Navarra por la dirección inicial de la tesis, José Manuel Jiménez Bascones, del Departamento de Mecánica Aplicada de la Universidad de Navarra y Jesús María Pintor Borobia, del Departamento de Ingeniería Mecánica, Energética y de Materiales de la Universidad Pública de Navarra, los que debido a un cambio de organigrama y por mayor afinidad al tema, asumieron la dirección de la tesis hasta estar concluida. Al resto de profesores del Departamento de Ingeniería Mecánica, Energética y de Materiales de la Universidad Pública de Navarra por su ayuda, ánimo y consejos sobre la tesis, a las Secretarias del Departamento por la realización de los trabajos administrativos que la tesis conlleva, a los técnicos de laboratorio, especialmente a Iñaki Calvo Elizazu, por la construcción de prototipos. Quiero mostrar mi agradecimiento también al Departamento de Proyectos e Ingeniería Rural de la Universidad Pública de Navarra y especialmente a los profesores José Ramón Alfaro López y Miguel Ángel Pascual Buisan por sugerirme y permitirme la utilización del programa CATIA para la visualización del espacio de trabajo del manipulador, y al becario Iker Echarri Carasatorre por su manejo del programa CATIA y la realización de figuras. Por la atención que han tenido enviándome sus artículos, algunos incluso antes de ser publicados en las revistas, mi agradecimiento a los profesores e investigadores J. Ángeles (McGill University) Canadá, R. Clavel (École Politechnique Fédérale de Lausanne) Suiza, C. L. Colins (California Institute of Technology) USA, G. Danescu (Laboratoire de Méchanique Appliquée de BesanÇon) Francia, A. Ferrand, M. Renaud y J. Catala (Laboratoire d�Analyse et d�Architecture des Systemes, Toulouse) Francia, A. Ghosal (Indian Institute of Science, Bangalore) India, M. Giordano y E. Benoit (LMécA, Universiteé de Savoie) Francia, C. Gosselin y R. Ricard (Université

Laval, Québec) Canadá, C. Innocenti (Universitá degli Studi di Bologna) Italia, L. Notash (Queen�s University Kingston) Canadá, Y Takeda (Tokio Institute of Technology) Japón, L. W. Tsai (University of Maryland) USA, V. Zamanov (Technical University of Sofia) Bulgaria, D. Zlatanov, R. G. Fenton y B. Benhabid (University of Toronto) Canadá. Al resto de investigadores que figuran en las referencias porque sus artículos han supuesto una gran ayuda para el desarrollo de esta tesis. Finalmente un agradecimiento muy especial a J. P. Merlet (INRIA, Francia) por tener a disposición pública toda su contribución al estudio de los Robots Paralelos y las referencias de otros autores.

RESUMEN
Esta tesis se enmarca en el campo de la síntesis de mecanismos e
incluye un trabajo desarrollado en el campo de la optimización de mecanismos planos y un estudio de las características cinemáticas de un manipulador paralelo, un mecanismo espacial formado por dos plataformas, una fija y otra móvil con varios grados de libertad, unidas por varias cadenas cinemáticas sobre las que accionan los actuadores.
Después de una introducción contenida en el Capítulo I, en el Capítulo
II se realiza un estudio sobre el proceso de síntesis, desde la elección de mecanismo, pasando por una síntesis de puntos de precisión y acabando con la optimización dinámica, poniendo ejemplos por medio de mecanismos planos (Anexos I y II).
Al intentar aplicar el proceso expuesto en el párrafo anterior a
mecanismos espaciales, se encuentran infinidad de mecanismos, con unas características cinemáticas y dinámicas propias de cada uno, lo que obliga a analizarlas, para ver si el mecanismo resulta idóneo para realizar el trabajo deseado, antes de pasar al proceso de optimización.
Para realizar el estudio de las características cinemáticas y dinámicas
de un mecanismo espacial, se toma el conjunto de manipuladores paralelos y, de entre éstos, el manipulador paralelo 6-RKS1.
En el Capítulo III, se hace una aproximación al estado del arte sobre
los manipuladores paralelos, y en particular a las características cinemáticas de los manipuladores 6-RKS conocidos.
El manipulador paralelo 6-RKS, debido a que las cadenas cinemáticas
de unión de las plataformas se pueden considerar mecanismos de biela-manivela, posee unas configuraciones de insensitividad de posición de la plataforma móvil, en las que la plataforma móvil permanece fija independientemente del movimiento introducido por los actuadores. Entre estas configuraciones hay algunas que son de insensitividad total y otras de insensitividad parcial, dependiendo de si la plataforma móvil permanece fija al introducir movimiento por todos los actuadores o por parte de ellos respectivamente.
1 6-RKS - Manipulador paralelo, con las dos plataformas unidas por seis cadenas cinemáticas, conteniendo cada una: un par giratorio, una junta cardan y un par esférico.

El Capítulo IV comprende el estudio de las configuraciones de insensitividad de posición de la plataforma móvil. En un ejemplo numérico, se determinan todas las configuraciones de insensitividad total para unas determinadas dimensiones del manipulador.
Debido a las ventajas que ofrecen este tipo de configuraciones, en el
Capítulo V se propone un método para conseguir que varias posiciones prefijadas de la plataforma móvil se consigan en configuración de insensitividad total. En dos ejemplos numéricos, se determinan las dimensiones del manipulador para lograr, respectivamente, dos y tres posiciones.
Finalmente, en el Capítulo VI, se realiza un estudio para comprobar si
son alcanzables todas las configuraciones de insensitividad total, para unas determinadas dimensiones del manipulador. Esta comprobación se lleva a cabo mediante el establecimiento de un proceso a seguir con una serie de reglas, que tienen cierta similitud con las leyes de Grashof aplicables al cuadrilátero articulado.

ÍNDICE

Índice
ii

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
iii
ÍNDICE
CAPÍTULO I - INTRODUCCIÓN I.1 - Introducción............................................................................................... 3 I.2 - Situación actual de la síntesis de mecanismos........................................... 5 I.3 - Objetivos de la tesis................................................................................... 7 I.4 - Proceso seguido en la realización de la tesis............................................. 8
CAPÍTULO II - SÍNTESIS DE MECANISMOS II.1 - Introducción a la síntesis de mecanismos............................................... 15 II.2 - Métodos clásicos de síntesis de mecanismos......................................... 18 II.3 - Métodos actuales de síntesis de mecanismos......................................... 18
II.3.1 - Síntesis de tipo y de número o síntesis estructural...................... 19 II.3.1.1 - Ejemplo de síntesis estructural.......................................... 19
II.3.2 - Síntesis de generación de trayectoria y de puntos de precisión... 22 II.3.2.1 - Ejemplo de síntesis de generación de trayectoria............. 22
II.3.3 - Optimización dinámica................................................................ 25 II.3.3.1 - Estudio cinemático............................................................ 25 II.3.3.2 - Estudio dinámico............................................................... 27 II.3.3.3 - Simulación dinámica......................................................... 28 II.3.3.4 - Optimización del mecanismo............................................ 29
II.4 - Conclusiones........................................................................................... 31 CAPÍTULO III - MANIPULADORES PARALELOS III.1 - Introducción.......................................................................................... 35 III.2 - Manipuladores paralelos....................................................................... 36
III.2.1 - Manipuladores paralelos 6-RKS................................................ 40 II.2.1.1 - Características de los manipuladores paralelos 6-RKS.... 47
III.3 - Conclusiones.......................................................................................... 48

Índice
iv
CAPÍTULO IV - CONFIGURACIONES DE INSENSITIVIDAD IV.1 - Introducción.......................................................................................... 51 IV.2 - CIP y CIN en mecanismos espaciales................................................... 54
IV.2.1 - CIP y CIN en manipuladores paralelos...................................... 55 IV.2.1.1 - CIP y CIN en manipuladores paralelos 6-RKS............... 57
IV.3 - CIP en manipuladores paralelos 6-RKS................................................ 58 IV.3.1 - Configuraciones de insensitividad total y parcial....................... 61 IV.3.2 - Determinación de las 64 CIP del manipulador 6-RKS............... 66 IV.3.3 - Comprobación de las 64 configuraciones logradas.................... 70
IV.4 - Ejemplo numérico................................................................................. 72 IV.4.1 - Cálculo de la primera configuración de insensitividad.............. 74
IV.4.1.1 - Resolución del sistema.................................................... 75 IV.4.1.2 - Solución........................................................................... 75
IV.4.2 - Cálculo de las CIP...................................................................... 76 IV.4.3 - Cálculo de velocidades............................................................... 88
IV.4.3.1 - Comprobación de las CIP................................................ 89 IV.5 - Conclusiones......................................................................................... 90 CAPÍTULO V - SÍNTESIS DE UN MANIPULADOR 6-RKS V.1 - Introducción............................................................................................ 95 V.2 - Posiciones predeterminadas en CIP........................................................ 96
V.2.1 - Una posición predetermina en CIP.............................................. 98 V.2.2 - Dos posiciones predeterminadas en CIP...................................... 100
V.2.2.1 - Formas de obtener dos posiciones en CIP........................ 101 V.2.3 - Tres posiciones predeterminadas en CIP..................................... 103
V.2.3.1 - Formas de obtener tres posiciones en CIP........................ 105 V.2.4 - Cuatro posiciones predeterminadas en CIP................................. 106
V.2.4.1 - Formas de obtener cuatro posiciones en CIP................... 106 V.3 - Ejemplo numérico para dos CIP............................................................ 107
V.3.1 - Introducción de datos.................................................................. 108 V.3.2 - Condiciones de restricción.......................................................... 110 V.3.3 - Resolución del sistema................................................................ 113 V.3.4 - Soluciones.................................................................................... 114 V.3.5 - Conclusiones de la síntesis para dos CIP..................................... 122
V.4 - Ejemplo numérico para tres CIP............................................................ 123 V.4.1 - Introducción de datos.................................................................. 123 V.4.2 - Condiciones de restricción.......................................................... 126 V.4.3 - Resolución del sistema................................................................ 130 V.4.4 - Soluciones................................................................................... 131
V.5 - Conclusiones.......................................................................................... 132

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
v
CAPÍTULO VI - COMPROBACIÓN DEL GIRO DE MANIVELAS VI.1 - Introducción.......................................................................................... 137 VI.2 - Situación actual.................................................................................... 137 VI.3 - Proceso a seguir.................................................................................... 138
VI.3.1 - Dimensiones previas.................................................................. 138 VI.3.2 - Comprobación de la longitud de las bielas................................ 140
VI.3.2.1 - Comprobación de la longitud de las bielas "2" y "3"..... 141 VI.3.2.2 - Comprobación de la longitud de las bielas "4" y "5"..... 148 VI.3.2.3 - Comprobación de la longitud de las bielas "6" y "1"..... 149 VI.3.2.4 - Conclusiones sobre las longitudes de las bielas............. 150
VI.3.3 - Dimensiones de las aristas de la plataforma móvil.................... 151 VI.3.3.1 - Comprobación de la longitud de la arista "A12"............. 152 VI.3.3.2 - Distancias de los puntos "123" y "161" analíticamente.. 153 VI.3.3.3 - Distancias de los puntos "123" y "161"
por el método numérico de Newton-Raphson............... 157 VI.3.3.4 - Distancias de los puntos "123" y "161" gráficamente.... 158 VI.3.3.5 - Distancias entre los puntos "123" y "145"
y entre los puntos "145" y "161"................................... 170 VI.3.3.6 - Conclusiones sobre la longitud de una arista.................. 170
VI.3.4 - Dimensiones de la plataforma móvil......................................... 171 VI.4 - Conclusiones........................................................................................ 174
CONCLUSIONES GENERALES
C.1 - Síntesis de mecanismos......................................................................... 179 C.2 - Manipuladores Paralelos........................................................................ 179 C.3 - Configuraciones de insensitividad de posición...................................... 179 C.4 - Síntesis de un manipulador paralelo 6-RKS.......................................... 181 C.5 - Comprobación del giro de las manivelas............................................... 181 LÍNEAS DE INVESTIGACIÓN ABIERTAS
L.1 - Síntesis de un manipulador paralelo 6-RKS........................................... 187 L.2 - Dimensiones del manipulador................................................................ 187 L.3 - Espacio de trabajo................................................................................... 187 L.4 - Configuraciones de incertidumbre......................................................... 188 L.5 - Dinámica del manipulador..................................................................... 188 L.6 - Optimización del manipulador............................................................... 188

Índice
vi
ANEXO I.- SINTESIS DE PUNTOS DE PRECISIÓN AI.1 - Ejemplo numérico................................................................................ 191
AI.1.1 - Introducción de datos................................................................ 191 AI.1.2 - Condiciones de restricción........................................................ 192 AI.1.3 - Resolución del sistema.............................................................. 193 AI.1.4 - Solución..................................................................................... 194
ANEXO II - OPTIMIZACIÓN DE UN CUADRILÁTERO ARTICULADO AII.1 - Ejemplo numérico............................................................................... 197
AII.1.1 - Datos del mecanismo............................................................... 198 AII.1.2 - Estudio cinemático................................................................... 200
AII.1.2.1 - Cálculo de posición....................................................... 201 AII.1.2.2 - Cálculo de velocidades.................................................. 202 AII.1.2.3 - Cálculo de aceleraciones............................................... 203
AII.1.3 - Cálculo dinámico..................................................................... 205 AII.1.3.1 - Simulación dinámica.................................................... 207
AII.1.4 - Cálculo de sensibilidad cinemática.......................................... 209 AII.1.4.1 - Sensibilidad de posición................................................ 209 AII.1.4.2 - Sensibilidad de velocidades.......................................... 211 AII.1.4.3 - Sensibilidad de aceleraciones........................................ 213
AII.1.5 - Cálculo de sensibilidad dinámica............................................. 215 AII.2 - Resolución del ejemplo numérico....................................................... 220
AII.2.1 - Longitudes de los eslabones..................................................... 221 AII.2.2 - Simulación dinámica................................................................ 224 AII.2.3 - Resultados................................................................................ 225 AII.2.4 - Diagramas del par motor.......................................................... 226
AII.3 - Conclusiones....................................................................................... 227 REFERENCIAS Referencias..................................................................................................... 231

NOMENCLATURA

Nomenclatura
viii

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
ix
NOMENCLATURA
Apq......... Longitud del lado de la plataforma móvil entre las bielas "p" y "q",
para pq = [12, 34, 56]. b.............. Vector de variables de diseño. bT ........... Vector "b" traspuesto. CIN......... Configuración de incertidumbre de posición. CIP.......... Configuración de insensitividad de posición total. CIP-1...... Configuración de insensitividad de posición para una cadena
cinemática. CIP-2...... Configuración de insensitividad de posición para dos cadenas
cinemáticas. CIP-3...... Configuración de insensitividad de posición para tres cadenas
cinemáticas. CIP-4...... Configuración de insensitividad de posición para cuatro cadenas
cinemáticas. CIP-5...... Configuración de insensitividad de posición para cinco cadenas
cinemáticas. CIP-6...... Configuración de insensitividad de posición total (CIP). Di-j.......... Distancia entre los puntos "i" y "j". Dmax...... Distancia máxima entre dos puntos. Dm1........ Distancia máxima o mínima relativa "1" entre dos puntos. Dm2........ Distancia máxima o mínima relativa "2" entre dos puntos. Dmc........ Distancia máxima o mínima entre dos puntos con las bielas
cruzadas. Dmin....... Distancia mínima entre dos puntos. (Dmax)max.. Máximo de las distancias máximas entre dos puntos. (Dmin)max.. Máximo de las distancias mínimas entre dos puntos. (Dmax)min.. Mínimo de las distancias máximas entre dos puntos. (Dmin)min.. Mínimo de las distancias mínimas entre dos puntos. Ei............ Descentramiento del actuador "i" respecto de los ejes de simetría del
triángulo formado por los ejes de los actuadores. K............ Junta cardan. Li............ Longitud del eslabón o de la biela "i". M............ Matriz de masas referida a las coordenadas naturales. M............ Par del motor eléctrico. Mb ......... Sensibilidad de la matriz de masas respecto de las variables de
diseño. PI............ Posición de insensitividad. Q............ Vector de fuerzas exteriores.

Nomenclatura
x
Qt............ Relación de tiempos de las carreras de ida y retorno. qQ .......... Derivada de las fuerzas exteriores respecto de las coordenadas
naturales. bQ .......... Sensibilidad de las fuerzas exteriores respecto de las variables de
diseño. Qq& .......... Derivada de las fuerzas exteriores respecto de las velocidades. q............. Vector de coordenadas naturales (vector de posición de los puntos de
referencia). qi............. Vector de posición en la iteración "i". qi+1.......... Vector de posición en la iteración "i+1". qT .......... Vector "q" traspuesto. q& ............ Vector de velocidades de los puntos de referencia. q&& ............ Vector de aceleraciones de los puntos de referencia. qb ........... Sensibilidad del vector de posición respecto de las variables de
diseño. qb& .......... Sensibilidad de las velocidades respecto de las variables de diseño. qb&& .......... Sensibilidad de las aceleraciones respecto de las variables de diseño.
R............. Par giratorio. Ri............ Longitud de la manivela "i". R2............ Resistencia del rotor del motor eléctrico. S............. Par esférico. S............. Deslizamiento del campo magnético del motor eléctrico V............. Velocidad de un punto. X2........... Reactancia del rotor del motor eléctrico. X& ........... Componente "X" de la velocidad de un punto. Y& ........... Componente "Y" de la velocidad de un punto. Z& ........... Componente "Z" de la velocidad de un punto. X&& ........... Componente "X" de la aceleración de un punto. Y&& ........... Componente "Y" de la aceleración de un punto. Z&& ........... Componente "Z" de la aceleración de un punto. α ........... Coeficiente de la corrección de Baungarte. α ........... Ángulo entre las dos posiciones del eslabón acoplador en
configuración de insensitividad. α i .......... Aceleración angular de la manivela "i". β ............ Coeficiente de la corrección de Baungarte. θi ........... Ángulo del eslabón o de la manivela "i". λ ........... Vector de multiplicadores de Lagrange.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
xi
bλ .......... Sensibilidad de los multiplicadores de Lagrange respecto de las variables de diseño.
φ............. Ecuación de restricción. Φ ........... Sistema de ecuaciones de restricción. Φ& ........... Derivada implícita2 de " Φ " respecto de "t". Φ&& ........... Derivada segunda implícita de " Φ " respecto de "t".
qΦ ......... Matriz jacobiana de las condiciones de restricción respecto de "q".
qTΦ ......... Matriz jacobiana traspuesta.
Φ& q .......... Derivada implícita de " qΦ " respecto de "t".
Φ&& q .......... Derivada segunda implícita de " qΦ " respecto de "t".
Φ& qq ........ Derivada implícita de " qqΦ " respecto de "t".
qqΦ ........ Derivada segunda de " Φ " respecto de las coordenadas naturales.
qqTΦ ........ Matriz " qqΦ " traspuesta. qbΦ ........ Derivada de la matriz Jacobiana respecto de las variables de diseño.
qbTΦ ........ Matriz " qbΦ " traspuesta.
Φ& qb ........ Derivada implícita de " qbΦ " respecto de "t".
bΦ .......... Derivada de " Φ " respecto de las variables de diseño. Φ& b .......... Derivada implícita de " bΦ " respecto de "t".
Φ&& b .......... Derivada segunda implícita de " bΦ " respecto de "t". tΦ .......... Derivada explícita3 de las condiciones de restricción respecto "t".
Φ& t .......... Derivada implícita de " tΦ " respecto de "t". tqΦ ......... Derivada de " tΦ " respecto de las coordenadas naturales.
tbΦ ......... Derivada de " tΦ " respecto de las variables de diseño. Φ& tq ......... Derivada implícita de " tqΦ " respecto de "t". ωi .......... Velocidad angular de la manivela "i". 0i............ Punto del eje del actuador "i", en la base de la perpendicular trazada
a dicho eje desde el punto "1i". 1i............ Centro de la articulación cardan del extremo de la manivela del
actuador "i". 1jk.......... Centro de la rótula de la plataforma móvil donde se unen las bielas
"j" y "k", para jk = [23, 45, 61]. 6-RKS..... Seis cadenas cinemáticas con pares "R", "K" y "S". 2 Derivada implícita quiere decir que se derivan respecto de "t" todos los términos que dependen del tiempo. 3 Derivada explícita quiere decir que se derivan respecto de "t" solamente los términos en los que aparece la variable "t".

Nomenclatura
xii

CAPÍTULO I
INTRODUCCIÓN

Introducción
2

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
3
CAPÍTULO I - INTRODUCCIÓN
I.1 � INTRODUCCIÓN Esta tesis se enmarca, dentro de la mecánica, en el campo de la
síntesis de mecanismos. Según Reuleaux una máquina se puede considerar como "una
combinación de cuerpos resistentes de tal manera que, por medio de ellos, las fuerzas mecánicas de la naturaleza se pueden encauzar para realizar un trabajo acompañado de movimientos determinados". Y un mecanismo se puede considerar como "una combinación de cuerpos resistentes conectados por medio de articulaciones para formar una cadena cinemática cerrada con un eslabón fijo y cuyo propósito es transformar el movimiento".
En el diseño de una máquina pueden intervenir muchos campos de la
ciencia como por ejemplo la mecánica, la termodinámica, la mecánica de fluidos o la ciencia de materiales, y se deben tener en cuenta aspectos como el económico, el estético, ..... No obstante, de todos los estudios que se deben de realizar en el diseño de una máquina, el estudio mecánico es de primordial importancia, ya que la mecánica es la ciencia que relaciona la geometría, las fuerzas y los desplazamientos, factores que determinan el funcionamiento de la máquina. En el diseño de los mecanismos, el estudio mecánico será uno de los más importantes ya que, según la definición de mecanismo, el objetivo de éstos es transformar el movimiento y el análisis del movimiento lo realiza la mecánica.
Al principio de la revolución industrial, el trabajo de los animales y el
trabajo más pesado del hombre fue sustituido por el de las máquinas. Poco a poco, se ha ido sustituyendo el trabajo físico del hombre y, actualmente, con la reconversión industrial, se está sustituyendo por el de las máquinas, incluso el trabajo más cualificado realizado por hombre.
De lo expuesto anteriormente, se deduce la importancia del "Diseño
de Máquinas" para que éstas sean capaces de realizar los trabajos más complejos, a gran velocidad, con seguridad para las personas y bienes que estén a su alrededor, y con unos costes competitivos.
El diseño global de una máquina comienza por el diseño particular de
los mecanismos que la componen; ya que los movimientos necesarios en la

Introducción
4
máquina se consiguen por medio de diferentes mecanismos y, por lo tanto, desde el punto de vista mecánico, las máquinas se pueden considerar formadas por la combinación de varios mecanismos.
En muchas máquinas, la energía se introduce por medio del
movimiento giratorio de un motor eléctrico o térmico y su objetivo es generar unos movimientos que no son giratorios, o si lo son, son más rápidos o más lentos que el movimiento de entrada. Estos cambios entre el movimiento de entrada y el de salida se consiguen por medio de mecanismos.
Otras máquinas, como por ejemplo los motores de combustión interna
alternativos, aprovechan la energía que el combustible suministra al pistón, que realiza un movimiento rectilíneo alternativo. Como el movimiento más fácilmente aprovechable a la salida de un motor es el giratorio, se necesita el mecanismo pistón-biela-manivela para hacer la conversión del movimiento alternativo en giratorio.
Por lo visto en los párrafos anteriores, se deduce que es muy
importante hacer un buen diseño de mecanismos para realizar un buen diseño mecánico de máquinas.
El diseño de un mecanismo en particular, o de una máquina en
general, consta de dos partes diferenciadas: "Síntesis" y "Análisis". La síntesis consiste en establecer a priori los tamaños, formas,
composición de materiales y disposición de las piezas, del tal modo que el mecanismo o máquina resultante desempeñe el trabajo deseado.
Mediante el análisis se hace un estudio sobre un mecanismo o
máquina previamente sintetizada, para determinar si los movimientos que realiza (trayectorias, velocidades y aceleraciones) son los deseados, y si los esfuerzos que aparecen en los diferentes puntos de las piezas son menores que los esfuerzos que son capaces de soportar.
La síntesis requiere imaginación, creatividad, sentido común y
experiencia. En cambio, en el análisis se necesitan una serie de conocimientos de mecánica para determinar si el mecanismo o máquina sintetizado realiza los movimientos prescritos, y si es suficientemente resistente como para soportar los esfuerzos a que se verá sometido. No obstante, el trabajo de análisis puede resultar muy complejo; por ejemplo, cuando se trata de determinar el movimiento de un mecanismo sometido a unas fuerzas exteriores.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
5
En el diseño de un mecanismo o máquina, el proceso habitual es el siguiente: En primer lugar, se sintetiza el mecanismo o máquina, normalmente de forma aproximada. Posteriormente, se realiza el análisis. Por regla general, el mecanismo o máquina sintetizada no suele realizar perfectamente el movimiento prescrito, o está mal dimensionado en cuanto a resistencia. Por ello, se hace necesario variar el diseño, y volver a realizar el análisis, en un proceso iterativo hasta comprobar que el mecanismo o máquina realiza el movimiento deseado, y sus piezas están dimensionadas de forma que serán capaces de soportar los esfuerzos a que vayan a estar sometidas.
Hasta hace aproximadamente 40 años, el proceso indicado en el
párrafo anterior se hacía manualmente y, normalmente, no se tenía en cuenta si la solución obtenida era la óptima. En muchos casos, las máquinas y mecanismos se iban optimizando gracias a la experiencia adquirida con los resultados reales de otras máquinas construidas anteriormente. En las últimas décadas, con el desarrollo de la informática, el proceso iterativo se ha realizado por medio de ordenadores, que reducen el tiempo de cálculo y permiten añadir la optimización de las diferentes soluciones posibles; algo impensable realizar manualmente, para problemas ligeramente complicados, por lo tedioso y costoso en tiempo que resultaba.
I.2 - SITUACIÓN ACTUAL DE LA SÍNTESIS DE MECANISMOS En la actualidad, al realizar la síntesis de mecanismos, se debe
conseguir que ésta sea óptima bajo algún punto de vista preestablecido por el diseñador.
Para conseguir un diseño óptimo, éste se divide en dos grandes
bloques, tal como se ha visto en el apartado anterior: Elección del tipo de mecanismo y optimización del mismo.
Para la elección del tipo, es necesario conocer las características
cinemáticas y dinámicas de muchos mecanismos, cuantos más mejor, y así poder hacer la elección de uno, entre los que sean capaces de desarrollar el trabajo deseado.
El punto de vista mecánico bajo el que se suelen optimizar los
mecanismos puede depender de la cinemática del mecanismo (posiciones, velocidades y aceleraciones) y de la dinámica (fuerzas y momentos).
Hoy en día, en la síntesis de mecanismos se está trabajando, por un
lado, en el desarrollo de nuevos mecanismos, estudiando sus características

Introducción
6
cinemáticas y dinámicas y, por otro lado, en la optimización de los mecanismos ya desarrollados.
Esta tesis incluye un trabajo desarrollado en el campo de la
optimización de mecanismos planos y un estudio de las características cinemáticas de un manipulador paralelo, un mecanismo espacial formado por dos plataformas, una fija y otra móvil con varios grados de libertad, unidas por varias cadenas cinemáticas, en paralelo, sobre las que accionan los actuadores (Fig. I-1).
Fig. I-1 Manipulador paralelo

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
7
I.3 - OBJETIVOS DE LA TESIS El objetivo ideal de una tesis de síntesis de mecanismos, es desarrollar
un método que permita realizar el diseño óptimo, tanto de mecanismos planos como espaciales.
En esta tesis se describe un proceso para llevar a cabo la síntesis de
mecanismos, desde la elección del tipo de mecanismo hasta la optimización cinemática y dinámica del mismo, poniendo ejemplos de los pasos seguidos en el proceso, por medio de mecanismos planos.
El proceso a seguir con mecanismos espaciales sería el mismo que
para mecanismos planos; pero debido a las diversas características cinemáticas y dinámicas de los innumerables tipos que existen o que se pueden diseñar, aunque el objetivo final sería la síntesis óptima, sólo se estudiarán algunas características cinemáticas de un determinado tipo de mecanismo espacial, el manipulador paralelo 6-RKS propuesto por Hunt en 1983 [HUN. 83].
Se estudiarán, en primer lugar, las características cinemáticas y
dinámicas propias de los Manipuladores Paralelos 6-RKS, para disponer de una información que permita la síntesis estructural o elección del mecanismo para un trabajo para el que sea idóneo.
Entre las características cinemáticas de estos manipuladores se
encuentran las "configuraciones de insensitividad de posición de la plataforma móvil". Se analizarán estas configuraciones y se introducirá el concepto de su utilidad, pues no se conoce ningún trabajo anterior que lo haga. La mayoría de investigadores que han estudiado configuraciones singulares lo han hecho con el objeto de eliminarlas del espacio de trabajo. A continuación se determinará el número de configuraciones de este tipo que puede alcanzar el manipulador y un método para localizarlas.
Se propondrá un método para conseguir que varias posiciones
predeterminadas de la plataforma móvil se alcancen estando el mecanismo en configuración de insensitividad total.
Se propondrá un proceso a seguir con unas reglas, con cierta similitud
a las leyes de Grashof, que permita comprobar si todas las manivelas del manipulador pueden dar vueltas completas y así conseguir todas las configuraciones de insensitividad de posición posibles.

Introducción
8
I.4 - PROCESO SEGUIDO EN LA REALIZACIÓN DE LA TESIS Esta tesis se inició con el objetivo general de realizar "síntesis
cinemáticas y dinámicas de mecanismos asistidas por computador". Para realizar la síntesis se siguió un proceso basado en algunos
métodos propuestos por García de Jalón J. y Bayo E. [GAR. 94]. Por ejemplo:
- Utilización de coordenadas naturales para determinar la posición del mecanismo. Con estas coordenadas se definen puntos característicos como los pares cinemáticos.
- Planteamiento de condiciones de restricción entre los puntos definidos por
las coordenadas naturales, como distancias fijas entre puntos o ángulos constantes entre determinadas direcciones.
- Cálculo de las posiciones de los puntos del mecanismo, definidos por las
coordenadas naturales, por el método iterativo de Newton-Raphson de linealización de las condiciones de restricción.
- Cálculo de velocidades y aceleraciones por derivación de las condiciones de
restricción respecto del tiempo.
- Simulación cinemática a partir de unas posiciones, velocidades y aceleraciones dadas.
- Planteamiento de las ecuaciones de la dinámica con las aceleraciones de los
puntos definidos por las coordenadas naturales, lo que obliga a introducir la matriz de masa y los multiplicadores de Lagrange.
- Simulación dinámica por integración numérica, a partir de unas posiciones y
velocidades iniciales, resolviendo en cada paso las ecuaciones dinámicas del mecanismo.
- Aplicación del método de Baumgarte durante la simulación dinámica para
garantizar la convergencia de la integración numérica.
- Análisis de sensibilidades cinemática y dinámica, con el objeto de determinar las sensibilidades de posiciones, velocidades, aceleraciones, masas, multiplicadores y fuerzas exteriores respecto de las variables de diseño.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
9
- Planteamiento de una función objetivo dependiente de la cinemática y dinámica del mecanismo, cálculo de sus sensibilidades respecto de las variables de diseño y variación de éstas, en el sentido indicado por la sensibilidad correspondiente, hasta minimizar o maximizar la función.
Siguiendo los pasos expuestos, se realizaron programas en Qbasic
Visual-Basic y Matlab para el cálculo cinemático y dinámico de cuadriláteros articulados, levas y mecanismos de Whitworth.
En el cálculo cinemático se determinaron posiciones, velocidades y
aceleraciones de los puntos definidos por las coordenadas naturales y se realizaron simulaciones cinemáticas en el tiempo a partir de la posición, velocidad y aceleración del eslabón de entrada. También se realizó un programa para síntesis de puntos de precisión, haciendo que un punto del eslabón acoplador de un cuadrilátero articulado alcance cinco posiciones predeterminadas.
En dinámica, los programas resuelven tanto los problemas inversos,
en los que se determinan las fuerzas a partir de una cinemática dada, como los problemas directos en los que se determinan las aceleraciones a partir de unas fuerzas exteriores dadas. En dinámica directa, también realizan la simulación en el tiempo a partir de unas posiciones y velocidades dadas por medio de integración numérica con corrección de Baungarte.
En Matlab, se realizaron programas de optimización de cuadriláteros
articulados y mecanismos de Whitworth, tomando como función objetivo la minimización del par motor máximo, de un motor asíncrono que impulse al mecanismo, durante una revolución de la manivela. La optimización se realizó determinando la sensibilidad del par motor respecto de las variables de diseño, variando éstas paso a paso en el sentido indicado por la sensibilidad hasta que la sensibilidad fuese cero.
Una vez seguido el proceso de síntesis cinemática y optimización
dinámica, resolviendo ejemplos de mecanismos planos, el objetivo era aplicar la misma teoría para mecanismos espaciales.
De mecanismos espaciales hay tal variedad, con unas características
cinemáticas propias de cada uno, que hizo que el estudio se centrase en los manipuladores paralelos. Estos mecanismos están formados por una plataforma fija y otra móvil unidas por medio de varias cadenas cinemáticas en paralelo sobre las que accionan los actuadores.

Introducción
10
En la bibliografía referente a manipuladores paralelos se da gran importancia a las características cinemáticas:
- Cinemática directa o determinación de la posición de la plataforma móvil a
partir de las posiciones de los actuadores. - Cinemática inversa o determinación de las posiciones de los actuadores a
partir de la posición de la plataforma móvil. - Configuraciones singulares, posiciones del mecanismo en las que la
plataforma móvil pierde o gana algún grado de libertad. - Espacio de trabajo o posiciones que puede llegar a alcanzar la plataforma
móvil. Una vez realizado el estudio de las características cinemáticas
anteriores, se inicia el estudio dinámico del manipulador. Al realizar un repaso sobre diferentes tipos de manipuladores
paralelos y sus características cinemáticas, se centró la atención en el manipulador paralelo 6-RKS propuesto por Hunt en 1983. Este manipulador está formado por una plataforma fija sobre la que están fijados seis actuadores giratorios (R) y una plataforma móvil triangular. Esta plataforma está unida a los actuadores por seis cadenas cinemáticas, cada una formada por una manivela y una biela unidas por una junta cardan (K). A cada vértice de la plataforma móvil se unen dos bielas por medio de juntas esféricas (S).
Como en este manipulador las plataformas están unidas con cadenas
cinemáticas de manivela biela se pensó que, de forma similar a los mecanismos planos de piston-biela-manivela y manivela-oscilador tienen configuraciones de insensitividad (puntos muertos o posiciones de volquete), en los que la velocidad del eslabón de salida es nula independientemente de la del de entrada, ellos deberían tener también configuraciones de insensitividad, en las que las velocidades de los puntos de la plataforma móvil fuesen nulas independientemente de las de los actuadores.
En las configuraciones de insensitividad, la posición del eslabón de
salida es de gran precisión, ya que pequeños errores en las posiciones de los eslabones de entrada no le afectan. Además, al pasar de una de estas configuraciones a otra, tanto la velocidad inicial como la final de los puntos del eslabón de salida son nulas, con la consiguiente ventaja dinámica que esto representa.
En estas configuraciones, los pares a aplicar a los actuadores para
equilibrar a las fuerzas y momentos que actúan sobre la plataforma móvil son

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
11
nulos. Ello es debido a que las líneas de acción de las fuerzas que actúan en los extremos de las manivelas cortan a los ejes de sus actuadores correspondientes.
Viendo la utilidad de las configuraciones de insensitividad, por
ejemplo de cara a posicionar piezas a mecanizar, se desarrolló un método para su localización sistemática, comprobándose a continuación que las configuraciones alcanzadas son realmente de insensitividad.
A continuación, y de forma similar a la síntesis de puntos de precisión
en mecanismos planos, se estudió la síntesis de manipuladores con el fin de lograr que varias posiciones de la plataforma móvil preestablecidas se consiguiesen estando el mecanismo en configuración de insensitividad.
Finalmente, con el fin de comprobar que todas las configuraciones de
insensitividad con alcanzables, se estudió un proceso con unas reglas a seguir tipo leyes de Grashof.

Introducción
12

CAPÍTULO II
SÍNTESIS DE MECANISMOS

Síntesis de Mecanismos
14

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
15
CAPÍTULO II - SÍNTESIS DE MECANISMOS
II.1 � INTRODUCCIÓN A LA SÍNTESIS DE MECANISMOS
La síntesis de mecanismos más o menos complicados, se ha venido utilizando desde la más remota antigüedad. A continuación, según la clasificación de J. Nieto [NIE. 78], se expone una relación de los diferentes tipos de síntesis de mecanismos que se han ido utilizando.
- Síntesis de tipo o de Reuleaux Trata de determinar la tipología de los eslabones a utilizar (barras,
levas, engranajes, etc.) y pares que los unen, en función de los criterios de equivalencia, idoneidad y de diversas cualidades de los mecanismos a conseguir.
- Síntesis de número o de Grubbler Estudia los grados de libertad de la cadena cinemática, inversiones,
isomorfismos, posibles configuraciones de un número de barras dado, de movilidad dada, etc.
Las dos síntesis anteriores unidas se conocen como síntesis
estructural.
- Síntesis dimensional
Una vez realizada las síntesis de tipo y de número, se inicia la síntesis dimensional, de la que se puede hacer la clasificación siguiente:
- Síntesis dimensional o de Burmester
Aunque en principio se asignaba esta denominación a los trabajos tendentes a obtener las dimensiones de las barras de un mecanismo, actualmente se reserva a las síntesis geométrico-planas que elaboró Burmester.

Síntesis de Mecanismos
16
- Síntesis de generación de funciones o de coordinación de barra
El objetivo se plantea como una relación entre varias posiciones de eslabones de entrada y salida. Se suele referir a un número finito de posiciones.
- Síntesis de generación de trayectorias
Trata de situar algún o algunos puntos de los eslabones de un mecanismo a lo largo de una trayectoria.
- Síntesis de puntos de precisión
En esta síntesis se pretende que se cumplan las exigencias de diseño en unos puntos determinados. Se puede considerar una variante del anterior.
- Síntesis de guiado de cuerpo rígido
El problema se plantea no como obtención de una serie de puntos, sino como situación y orientación de uno de los eslabones del mecanismo.
- Síntesis de Chebyshev
Se mide la desviación entre la función generada por el mecanismo y la perseguida a través de los polinomios de Chebyshev.
- Síntesis por tanteo gráfico o método "overlay"
Consiste en la búsqueda de la solución mediante procesos de tanteo que se ayudan de elementos auxiliares como gráficos. No comporta cálculo pero su convergencia es dudosa. Su principal ventaja es la sencillez.
- Síntesis cinemáticas
En este tipo de síntesis, se incluyen exigencias de tipo cinemático, como posición, valores de velocidades y aceleraciones. A este tipo de síntesis pertenecerían todas las citadas anteriormente.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
17
- Síntesis analíticas, gráficas, grafo-analíticas
Se clasifica la síntesis según la herramienta de cálculo utilizada sea analítica, gráfica o una mezcla de ambas.
- Síntesis planas y espaciales
Según sea el ámbito del movimiento del mecanismo al que se aplica la síntesis en el plano o en el espacio.
- Síntesis exactas
Este tipo de síntesis supone la existencia de, al menos, una solución que haga posible el cumplimiento de todas las exigencias de diseño.
- Síntesis aproximadas
Cuando, a diferencia del caso anterior, no se dispone de una solución que cumpla todas las exigencias de diseño, se trata de aproximar en lo posible los resultados a los objetivos propuestos.
- Síntesis óptima
Cuando en la síntesis exacta se tiene varias o infinitas soluciones o en la síntesis aproximada no se tiene ninguna solución exacta, se puede, desde algún punto de vista, fijar una función objetivo que en la síntesis óptima se puede minimizar o maximizar utilizando técnicas de optimización.
- Optimización dinámica
Reciben este nombre las síntesis en las que se engloban objetivos dinámicos como minimización de fuerzas de inercia, de fuerzas de restricción, pares motores, etc.

Síntesis de Mecanismos
18
II.2 - MÉTODOS CLÁSICOS DE SÍNTESIS DE MECANISMOS Tradicionalmente los problemas considerados por la síntesis
cinemática, y que están estrechamente relacionados entre sí en todo el proceso de diseño del nuevo mecanismo, son clasificados en tres categorías. La primera categoría incluye aquellas consideraciones que conciernen a la selección del tipo de mecanismo que mejor cumple con los requerimientos del diseño. Actualmente, se denomina "Síntesis de Tipo" y es el primer paso que se debe dar para iniciar el análisis. El objetivo es determinar la clase de eslabones o unidades constructivas a emplear: cuerpos, juntas, levas, engranajes, etc.
El segundo nivel o categoría se conoce como "Síntesis de Número".
Dado un mecanismo particular, este tipo de síntesis trata de determinar el número de cuerpos y el más apropiado número y clase de juntas cinemáticas que el mecanismo debe incluir para obtener un número dado de grados de libertad.
La última categoría trata de seleccionar los valores más apropiados
para los parámetros geométricos y dimensiones del mecanismo con el fin de cumplir los requerimientos impuestos por el diseñador, o al menos ser considerado como diseño óptimo desde algún punto de vista. Esta categoría se llama normalmente "Síntesis Dimensional".
Entre las tres categorías citadas, la resolución de los problemas de
síntesis de tipo y de número depende mucho de la experiencia del diseñador y resulta difícil desarrollar un algoritmo para resolverlos. En cambio, en la síntesis dimensional es más fácil utilizar métodos gráficos o analíticos para resolver el problema.
En general, los problemas tratados por la síntesis dimensional se
agrupan en tres familias diferentes: síntesis de generación de funciones, síntesis de generación de trayectorias y síntesis de guiado de cuerpo rígido.
II.3 - MÉTODOS ACTUALES DE SÍNTESIS DE MECANISMOS En la actualidad los métodos de síntesis clásicos han sido
complementados con la optimización de las síntesis cinemática y la optimización dinámica. Además, ha aumentado el número de mecanismos desarrollados y el conocimiento de sus características cinemáticas y dinámicas, por lo que han aumentado las posibilidades de cara a la elección del mecanismo.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
19
A continuación se exponen a modo de ejemplo tres tipos de síntesis actuales:
- Estructural. - De puntos de precisión. - Dinámica óptima.
II.3.1 - Síntesis de tipo y de número o síntesis estructural La síntesis de tipo y de número conjuntas, o síntesis estructural
consiste en elegir un tipo de mecanismo para realizar un determinado trabajo. Para poder realizar esta elección se deben conocer todas las
características cinemáticas y dinámicas de un gran número de mecanismos articulados, levas, engranajes....; y dentro de estos grupos, las diferentes características que pueden tener según sean sus dimensiones. Por ejemplo, un mecanismo articulado puede: ser manivela oscilador, tener puntos límite, ser de retorno rápido, etc.
II.3.1.1 - Ejemplo de síntesis estructural Se desea conseguir un movimiento giratorio oscilante, que se
aproxime a los extremos de la oscilación con velocidad angular decreciente, a partir de un movimiento de entrada giratorio de velocidad angular constante.
Para conseguir el tipo de movimiento deseado se puede intentar
diseñar un mecanismo totalmente nuevo, aunque eso no es lo más habitual, normalmente se estudian las características cinemáticas de mecanismos ya existentes, y en la mayoría de los casos, se pueden utilizar una serie de mecanismos que cumplan con las exigencias planteadas.
Por ejemplo, en el problema propuesto, se podría utilizar un
mecanismo de leva (Fig. II-1) o un manivela-oscilador basado en el cuadrilátero articulado (Fig. II-2) ya que ambos cumplen con las exigencias planteadas de que el eslabón de salida realice un movimiento giratorio oscilante entre dos posiciones extremas a las que llega con velocidad angular decreciente.
Las posiciones globales del mecanismo en las que la velocidad del
eslabón de salida es nula, independientemente de la velocidad del eslabón de entrada, se denominan configuraciones de insensitividad.

Síntesis de Mecanismos
20
Fig. II-1 Mecanismo de leva
Fig. II-2 Mecanismo manivela-oscilador
Si los dos mecanismos son de unas dimensiones apropiadas, tienen el
mismo diagrama de posición y el mismo diagrama de velocidad. El diagrama de posición representa el ángulo que forma el eslabón "4" con la horizontal frente al ángulo que forma el eslabón "2" también con la horizontal (Fig. II-3) y el diagrama de velocidades representa la velocidad angular del eslabón "4" en función de la posición del eslabón "2", suponiendo la velocidad angular de éste constante (Fig. II-4).

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
21
Fig. II-3 Diagrama de posición
Fig. II-4 Diagrama de velocidad Finalmente, por ejemplo, se decide utilizar el mecanismo de manivela-
oscilador por razones de situación del mecanismo en el conjunto de la máquina. Esta metodología seguida en el estudio de los diferentes tipos de
mecanismos que pueden cumplir con las exigencias pedidas y la elección de uno de esos mecanismos, siguiendo algún criterio propuesto por el diseñador, se correspondería con la síntesis estructural.

Síntesis de Mecanismos
22
Una vez realizada la síntesis estructural o elección del tipo de mecanismo y del número de eslabones, se van estableciendo otros tipos de síntesis, como síntesis cinemáticas o dinámicas, en las que se puede aplicar métodos de optimización, con el fin de lograr, dentro del tipo de mecanismo escogido, que éste tenga unas determinadas dimensiones y sea óptimo bajo algún punto de vista.
II.3.2 - Síntesis de generación de trayectoria y de puntos de precisión Una vez realizada la síntesis estructural, la síntesis de generación de
trayectoria trata de conseguir que un punto de un sólido rígido del mecanismo, describa una trayectoria predeterminada. Si en vez de exigir que un determinado punto describa una trayectoria completa, se fija que este punto pase por un determinado número de posiciones, a ésta variante se le puede llamar síntesis de puntos de precisión.
II.3.2.1 - Ejemplo de síntesis de generación de trayectoria
Como ejemplo de síntesis de generación de trayectoria se puede poner el diseño de un cuadrilátero articulado plano (Fig. II-5) de tal forma que un punto del eslabón acoplador (punto 3) describa una trayectoria definida por una serie de puntos dados.
Fig. II-5 Cuadrilátero articulado para generación de trayectoria

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
23
En este caso, la síntesis comprende la determinación de las dimensiones de los eslabones del mecanismo que hacen que se cumplan las condiciones preestablecidas. Estas dimensiones serán las variables de diseño.
Utilizando las coordenadas naturales, introducidas por García de Jalón
J. y Bayo E. [GAR. 94], siguiendo el método propuesto por Jiménez, Álvarez, Cardenal y Cuadrado [JIM. 97], suponiendo que los puntos "A" y "B" son fijos y que se pueden variar las longitudes de la manivela y del eslabón seguidor y las dimensiones y la forma del eslabón acoplador, resulta que las variables de diseño son los elementos del vector
bT = {L1, L2, L3, L4, L5} (II-1)
siendo L1 la longitud de la manivela, L2 la longitud del eslabón
acoplador, L3 la longitud del eslabón seguidor, L4 la distancia entre el punto "1" y la base de la perpendicular trazada desde el punto "3" al eslabón acoplador y L5 la distancia entre el punto "3" y la base de la perpendicular antes citada.
El vector de coordenadas dependientes de los puntos "1", "2" y "3",
que irán variando a lo largo de las trayectorias que describan según sea la posición del mecanismo, será:
qT = {X1, Y1, X2, Y2, X3, Y3} (II-2)
Las restricciones geométricas que deben cumplir los diferentes puntos
del mecanismo, para cualquier posición en la que se encuentre, se pueden expresar de la forma siguiente:
φ1 = (X1 - XA)2 + (Y1 - YA)2 - L2
1 = 0 (II-3) φ2 = (X1 - X2)2 + (Y1 - Y2)2 - L2
2 = 0 (II-4) φ3 = (X2 - XB)2+ (Y2 - YB)2 - L2
3 = 0 (II-5) φ4 = X3 - X1 - (X2 - X1) · L4 / L2 + (Y2 - Y1) · L5 / L2 = 0 (II-6) φ5 = Y3 - Y1 - (Y2 - Y1) · L4 / L2 - (X2 - X1) · L5 / L2 = 0 (II-7) φ6 = X3 - Xp = 0 (II-8) φ7 = Y3 - Yp = 0 (II-9)
Las tres primeras restricciones, ecuaciones (II-3), (II-4) y (II-5),
corresponden a las longitudes fijas de la manivela, el acoplador y el seguidor, las ecuaciones (II-6) y (II-7), indican la perpendicularidad entre los segmentos de longitudes "L4" y "L5" y las ecuaciones (II-8) y (II-9), recogen la condición

Síntesis de Mecanismos
24
de que las coordenadas del punto �3� deben ser las coordenadas de los puntos �P� que se desean conseguir.
Si la trayectoria a seguir por el punto "3" se diese por menos de cinco
puntos, por ejemplo por cuatro, resultaría que las 7 condiciones de restricción anteriores se convertirían en 28 ecuaciones, siete por cada punto propuesto. El número de incógnitas sería 29: cuatro valores de los seis elementos del vector de coordenadas dependientes "q", más los cinco elementos del vector "b" de las variables de diseño. En este caso, se tendría 28 ecuaciones y 29 incógnitas resultando un problema indeterminado con infinitas soluciones, por lo que admitiría poder plantear una optimización, por ejemplo buscar la solución en la que la suma de las longitudes de las barras sea mínima. También se podría predeterminar la longitud de un eslabón, con lo que quedaría reducido el problema a un sistema de 28 ecuaciones con 28 incógnitas que, en general, tendría solución única.
Ahora, se contempla el caso en que la trayectoria a seguir por el punto
"3" venga dada por más de cinco puntos, por ejemplo por "6". En este caso se tendrán siete condiciones de restricción por seis puntos que darían 42 ecuaciones de restricción. Por otro lado, seis valores de los seis elementos del vector "q" de coordenadas dependientes más los cinco valores del vector "b" de las variables de diseño, da un total de 41 incógnitas. En este problema, se tendrían 42 ecuaciones de restricción y 41 incógnitas por lo que, en general, no tendría solución, o sea no se podría conseguir que el punto "3" pasase por los seis puntos preestablecidos de la trayectoria. En este caso, se puede buscar una solución de manera que la suma de los cuadrados de las distancias entre los puntos previstos y los puntos logrados sea mínima, lo que supone optimizar una solución aproximada.
En el caso de que la trayectoria se dé exactamente por cinco puntos, se
tendrán siete condiciones de restricción por cinco puntos, es decir un total de 35 ecuaciones. Por otro lado, cinco valores de los seis elementos del vector "q" de coordenadas más cinco valores del vector "b" de variables de diseño, resulta un total de 35 incógnitas. Como en este caso se tienen 35 ecuaciones con 35 incógnitas, el problema, en general, tendrá solución y se podrá conseguir que el punto "3" del eslabón acoplador alcance las cinco posiciones preestablecidas. En este caso, a la síntesis se le puede considerar "síntesis de puntos de precisión".
En el Anexo I, se muestra la resolución de un ejemplo numérico de
"síntesis de puntos de precisión" para un cuadrilátero articulado plano, en el que se pretende que un punto del eslabón acoplador alcance cinco posiciones predeterminadas.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
25
II.3.3 - Optimización dinámica Hasta hace pocos años, sólo se disponía de programas de análisis
dinámico; esto es, programas que analizaban el comportamiento dinámico de un mecanismo después de haber definido de antemano su geometría y sus características dinámicas. En la actualidad se están desarrollando programas de diseño dinámico que no sólo analizan el comportamiento dinámico del mecanismo, sino que modifican automáticamente los parámetros del mismo hasta conseguir una solución óptima bajo algún punto de vista. Por ello, actualmente, diseño dinámico es sinónimo de solución óptima.
El diseño óptimo de un mecanismo se inicia con la definición de la
función objetivo que valora el funcionamiento del mecanismo. La solución del problema será la configuración que minimice la función objetivo en relación con las variables de diseño. El problema puede tener ecuaciones de restricción, esto es, igualdades o desigualdades que deben cumplir ciertas funciones de las variables de diseño. Dependiendo de la aplicación, la función objetivo se puede definir a lo largo de un intervalo de tiempo, pudiendo ser de tipo integral a lo largo de todo el intervalo, o puede estar definida en varios puntos del intervalo, o en un solo punto. La función objetivo normalmente depende de las variables de diseño no sólo de forma explícita, sino también implícitamente a través de los resultados del análisis dinámico: posiciones, velocidades, aceleraciones, fuerzas de restricción, ....
La mayoría de los programas de diseño dinámico se basan, para su
realización, en el cálculo de las derivadas de la función objetivo respecto de las variables de diseño. Este método se conoce como análisis de sensibilidad y es el primer paso en el proceso de optimización. Se puede considerar también separadamente, ya que la sensibilidad determina la tendencia de la función objetivo con respecto a la variación del diseño y esto resulta muy útil en los procesos de diseño iterativo no automático realizados paso a paso por el diseñador.
Para la realización de la optimización dinámica se utilizarán las
coordenadas naturales y se aplica el método expuesto por García de Jalón J. y Bayo E. [GAR. 94].
II.3.3.1 � Estudio cinemático La resolución del problema de optimización comienza por el estudio
cinemático. Es decir, el cálculo de la posición, velocidad y aceleración de una serie de puntos característicos del mecanismo.

Síntesis de Mecanismos
26
Sea "q" el vector de coordenadas naturales de los puntos característicos del mecanismo, "b" el vector de parámetros o variables de diseño (por ejemplo longitudes de los eslabones) y "Φ" el conjunto de restricciones geométricas que debe cumplir el mecanismo durante su funcionamiento.
Las restricciones geométricas del mecanismo se pueden escribir, de
forma compacta, como:
Φ(q, b, t) = 0 (II-10) La resolución del problema de posición consiste en determinar el
vector "q" de coordenadas naturales que cumpla con las condiciones de restricción, para una determinada posición del eslabón de entrada.
Como las condiciones de restricción normalmente son no lineales, se
utiliza en su resolución el método de linealización iterativo de Newton-Raphson. Con este método, se obtiene el vector de coordenadas naturales para una posición del mecanismo que cumple las restricciones geométricas, para una determinada posición del eslabón de entrada.
Para iniciar el método de Newton-Raphson se debe partir de un vector
de coordenadas naturales aproximadas. Según sea ese vector inicial puede que el método no converja a una solución aceptable; en cuyo caso, se debe probar con otro vector inicial de coordenadas naturales, y así sucesivamente hasta conseguir converger a una solución que represente una posición real del mecanismo. Un buen vector inicial suele ser el correspondiente a una posición real del mecanismo y fácil de determinar, que sea próxima a la posición que se desea calcular.
Una vez resuelto el problema de posición, derivando las ecuaciones de
restricción respecto del tiempo y suponiendo que los parámetros de diseño no varían con el tiempo, se obtiene:
Φq q& + Φt = 0 (II-11)
ecuaciones que relacionan las velocidades de los puntos dados por las
coordenadas naturales, para la posición determinada del mecanismo. Volviendo a derivar las ecuaciones de restricción respecto del tiempo
se obtiene:
Φq q&& + qq&&Φ Φ& t = 0 (II-12)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
27
ecuaciones que relacionan las aceleraciones de los puntos dados por las coordenadas naturales, para la posición determinada del mecanismo.
En las ecuaciones (II-11) y (II-12) "Φq" y " Φ& q " representan, la matriz
jacobiana de las condiciones de restricción respecto de las coordenadas naturales y la derivada de esa matriz respecto del tiempo respectivamente, "q", " q& " y " q&& " representan las posiciones, velocidades y aceleraciones de los puntos característicos del mecanismo y "Φt" y Φ& t representan la primera y segunda derivadas de las condiciones de restricción respecto del tiempo.
II.3.3.2 � Estudio dinámico Una vez resuelto el problema cinemático, se estudia el problema
dinámico, que es el estudio de las ecuaciones que relacionan las masas con la cinemática del mecanismo y con las fuerzas.
Debido a que el conjunto de coordenadas naturales no son
independientes, se introducen los multiplicadores de Lagrange en las ecuaciones que relacionan las masas con las fuerzas y las aceleraciones. Las ecuaciones para el estudio dinámico son:
M q&& + ΦT
q λ = Q (II-13) donde "M" representa la matriz de masas, "ΦT
q " la matriz jacobiana traspuesta, "λ" el vector de los multiplicadores de Lagrange y "Q" el vector de las fuerzas exteriores.
En el sistema (II-13) de "n" ecuaciones, se tienen "(n+m)" incógnitas:
los "n" elementos de vector de aceleraciones más los "m" elementos del vector de los multiplicadores. Para poder resolver este sistema, se toman en consideración también las "m" ecuaciones cinemáticas (II-12) del cálculo de las aceleraciones, formando así un sistema de "n+m" ecuaciones con "n+m" incógnitas, que se puede expresar en forma matricial como:
Φ
Φ0
M
q
Tq
·
λq&&
=
Φ−Φ− &&& tq qQ
(II-14)

Síntesis de Mecanismos
28
Sistema de ecuaciones que sirve tanto para resolver los problemas dinámicos directos, en los que las incógnitas son las aceleraciones, como los dinámicos inversos, en los que las incógnitas son las fuerzas. II.3.3.3 � Simulación dinámica
En los problemas dinámicos directos, para poder hacer una simulación
dinámica en el tiempo, partiendo de una posición y velocidad dadas, se van integrando numéricamente las ecuaciones dinámicas para obtener las nuevas velocidades y posiciones. No obstante esta integración puede no converger a la solución real y puede ir violando cada vez más las condiciones de restricción geométricas y de velocidades.
Para evitar este problema, en este caso, se utiliza el método de
estabilización de Baumgarte [BAU. 72]: - Tomando las ecuaciones de restricción (II-10) y su primera y
segunda derivada respecto del tiempo (II-11) y (II-12) respectivamente, se tendrá los siguientes sistemas de ecuaciones:
Φ(q, t) = 0 Φq &q + Φt = 0 Φq q&& + qq
&&Φ + Φ& t = 0
- que esquemáticamente se pueden representar como:
Φ = 0 (II-15) Φ& = 0 (II-16) Φ&& = 0 (II-17)
- Si se cumplen las condiciones de restricción de posición y de
velocidad, "Φ" y " Φ& " serán iguales a cero, por lo que la ecuación (II-17) se puede escribir:
Φ&& + 2 α Φ& + β2 Φ = 0 (II-18)
- Si al ir realizando la simulación dinámica, se van violando las
condiciones de restricción de posición o de velocidad, el sistema de ecuaciones (II-18) deja de cumplirse. En ese momento, los parámetros "α" y "β" introducen

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
29
una corrección, que hacen que la integración converja a la solución real en la mayoría de los casos.
- Al introducir los parámetros "α" y "β" propuestos por Baumgarte, se
sustituye la ecuación (II-12) por la (II-18), y el conjunto de ecuaciones cinemáticas y dinámicas queda de la siguiente forma:
Φ
Φ0
M
q
Tq
·
λq&&
=
g
Q (II-19)
- siendo:
g = - Φβ−Φ+Φα−Φ−Φ2
tqtq )q(2q &&&& (II-20)
II.3.3.4 � Optimización del mecanismo Una vez resuelto el problema cinemático y dinámico del mecanismo,
comienza la optimización, que consiste en minimizar o maximizar una cierta función objetivo que habrá definido el diseñador.
Para iniciar la optimización se realiza el análisis de sensibilidad, que
determina la variación de la respuesta del mecanismo en relación con la variación de los parámetros de diseño.
En el estudio de la sensibilidad se parte de las ecuaciones de
restricción (II-10) y se deriva respecto de los parámetros de diseño, obteniéndose: Φqqb + Φb = 0 (II-21)
ecuaciones de las que se determina el vector "qb" de sensibilidad de
posición respecto de los parámetros de diseño, siendo "Φb" la matriz de derivadas de las ecuaciones de restricción respecto de los parámetros de diseño.
Derivando las ecuaciones que relacionan las velocidades (II-11)
respecto de los parámetros de diseño se obtiene:
Φq qb& + Φ qqqb q& + Φqb q& + Φtqqb + Φtb = 0 (II-22)

Síntesis de Mecanismos
30
ecuaciones donde "Φqq" y "Φqb" son hipermatrices, resultado de derivar la matriz jacobiana respecto de las coordenadas dependientes y de las variables de diseño respectivamente, y "Φtq" y "Φtb" son las matrices de derivadas respecto de las coordenadas dependientes y de las variables de diseño respectivamente, del vector "Φt". Con estas ecuaciones se determina el vector " qb& " de sensibilidad de las velocidades respecto de los parámetros de diseño.
Derivando respecto de los parámetros de diseño las ecuaciones que
relacionan las aceleraciones (II-12) se obtiene:
Φq qb&& + Φqqqb q&& + Φqb q&& + Φ& qq qb q& + Φ& qb q& + qbq
&&Φ + Φ& tq qb + Φtb = 0 (II-23)
ecuaciones que relacionan la sensibilidad de las aceleraciones respecto de los parámetros de diseño " qb
&& ", donde " Φ& qq ", " Φ& qb ", " Φ& q " y " Φ& tq " representan las derivadas respecto del tiempo de matrices ya conocidas.
En los párrafos anteriores se han estudiado las sensibilidades
cinemáticas de posición y velocidad respecto de los parámetros de diseño, necesarias para determinar las sensibilidades en el problema dinámico. Tomando ahora la ecuación (II-13) de la dinámica del mecanismo y derivando respecto de los parámetros de diseño se obtiene:
=λΦ+ b
TqbqM && λΦ−λΦ−−++ T
qbbTqqbbqbqb qqMqQqQQ &&&& (II-24)
ecuaciones que relacionan las sesibilidades cinemáticas con las de los
multiplicadores de Lagrange y las fuerzas, y en las que " λb " es la matriz de derivadas de los multiplicadores respecto de las variables de diseño, " Qb ", " Qq " y " Qq& " son las matrices de derivadas de las fuerzas exteriores respecto de las variables de diseño, de las coordenadas y de las velocidades y "Mb" es la hipermatriz de las derivadas de la matriz de masas respecto de las variables de diseño.
La ecuación anterior, junto con la de sensibilidad de aceleraciones
(II-23) se puede escribir en forma compacta como:
Φ
Φ0
M
q
Tq
·
λ b
bq&& =
g
Q (II-25)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
31
donde:
Q = λΦ−λΦ−−++ Tqbb
Tqqbbqbqb qqMqQqQQ &&&& (II-26)
g = - Φqqqb &&q - Φqb &&q - Φ& qq qb &q - Φ& qb &q - qbq &&Φ - Φ& tq qb - Φtb (II-27)
Con el sistema de ecuaciones (II-25) se pueden obtener, en cada caso
distintas sensibilidades, dependiendo de cuales sean incógnitas. Una vez se han obtenido las sensibilidades de posición, velocidad,
aceleración, multiplicadores de Lagrange, masas y fuerzas exteriores respecto de los parámetros de diseño, se puede calcular la sensibilidad de la función objetivo respecto de dichos parámetros. Ello proporcionará información para saber cómo se deben variar los parámetros o variables de diseño con el fin de conseguir que la función objetivo sea máxima o mínima, bien paso a paso o aplicando algoritmos de optimización.
En el anexo II, siguiendo el proceso expuesto en este apartado, se
presenta un ejemplo numérico de optimización de las dimensiones de un cuadrilátero articulado, accionado por un motor asíncrono, para que el valor máximo del par motor durante un ciclo, es decir una revolución completa de la manivela, sea mínimo. Como condiciones de restricción se toman: el ángulo girado por el eslabón oscilador, su longitud y la relación de tiempos entre la carreras de ida y de retorno. II.4 CONCLUSIONES
En este capítulo se ha hecho un repaso de los métodos de síntesis
clásicos y actuales, aplicando los actuales a tres ejemplos típicos:
- Síntesis estructural, que consiste en la preselección de una serie de mecanismos que cumplen con las características prescritas (leva y manivela-oscilador) y, finalmente la elección de uno de ellos (manivela-oscilador).
- Síntesis de puntos de precisión, que se encuadra dentro de la síntesis
cinemática y su objetivo es el dimensionamiento de un mecanismo ya escogido, de forma que un punto determinado alcance una serie de posiciones predeterminadas. Como ejemplo, en el Anexo I, se determinan las dimensiones de un cuadrilátero articulado para que un punto del eslabón acoplador alcance cinco posiciones prefijadas.

Síntesis de Mecanismos
32
- Optimización dinámica o determinación de las dimensiones de un mecanismo que hagan máxima o mínima una determinada función objetivo. Como ejemplo en el Anexo II se presenta la optimización de las dimensiones de un cuadrilátero articulado accionado por un motor asíncrono, cuya función objetivo minimizada es el par motor máximo.

CAPÍTULO III
MANIPULADORES PARALELOS

Manipuladores Paralelos
34

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
35
CAPÍTULO III - MANIPULADORES PARALELOS
III.1 � INTRODUCCIÓN En el Capítulo II se ha expuesto un método actual para la síntesis
óptima de mecanismos, mostrando su aplicación por medio de tres ejemplos: Síntesis estructural, síntesis de puntos de precisión y optimización dinámica en mecanismos planos.
La síntesis óptima de mecanismos planos está muy desarrollada, con
numerosos programas de ordenador para su consecución. La teoría para la realización de la síntesis óptima de mecanismos
espaciales es la misma que para los mecanismos planos, sin embargo, tiene dificultades de aplicación por las diversas características cinemáticas y dinámicas de los innumerables tipos de mecanismos espaciales que existen o que se pueden diseñar.
Particularizando el proceso expuesto en el Capítulo II "Métodos
actuales de síntesis de mecanismos", para mecanismos espaciales, se seguirían los pasos siguientes:
- Síntesis estructural o elección del tipo de mecanismo. - Síntesis cinemática. - Optimización dinámica.
En la síntesis cinemática, también se podrá aplicar un proceso de
optimización planteando una función objetivo que deberá ser optimizada. Para resolver el primer paso de la optimización dinámica, que es la
síntesis estructural o elección del mecanismo, se deben conocer las características cinemáticas y dinámicas de los mecanismos espaciales y, sobre todo, las del mecanismo que se pretende elegir para desarrollar el trabajo deseado.
También se pueden sintetizar mecanismos nuevos, sobre los que
todavía no se ha realizado estudio alguno, con características mecánicas desconocidas, en los que se deberá comenzar por analizar sus características, continuar con el desarrollo de programas para realizar su análisis cinemático y dinámico y finalmente realizar su diseño óptimo.

Manipuladores Paralelos
36
Las características cinemáticas y dinámicas del mecanismo elegido o sintetizado condicionan todo el proceso de síntesis posterior, según sean éstas, el mecanismo será capaz o no de conseguir los objetivos propuestos.
Como consecuencia de lo expuesto en los párrafos anteriores, para
realizar la síntesis óptima de mecanismos espaciales, se ha fijado la atención solamente en los manipuladores paralelos, y en el conjunto de éstos, en el manipulador paralelo 6-RKS propuesto por Hunt [HUN. 83], en el que se realiza el estudio de una serie de características cinemáticas y dinámicas que le son propias.
III.2 � MANIPULADORES PARALELOS En una clasificación de mecanismos espaciales, un tipo podría ser el
conjunto de robots paralelos, caracterizados por el hecho de ser mecanismos de cadena cinemática cerrada y constituidos por un elemento móvil con varios grados de libertad que está unido a la base fija del mecanismo por varias cadenas cinemáticas en paralelo. Merlet J. P. [MER 90/97].
De este tipo de mecanismos el más utilizado y estudiado es el
conocido con el nombre de Plataforma de Stewart Generalizada (Fig. III-1). Aunque su configuración coincide con la plataforma de Gough [GOU. 62] (Fig. III-2) que fue diseñada con anterioridad a la de Stewart.
Fig. III-1 Plataforma de Stewart generalizada

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
37
Debido a que la plataforma de Stewart [STE. 65] (Fig. III-3 y III-4) fue utilizada para la construcción de simuladores de vuelo, hizo que fuese la más conocida cuando fue diseñada, y después ha ido cambiando su configuración hasta coincidir con la de Gough, manteniendo su denominación inicial.
La actual Plataforma de Stewart o Plataforma de Stewart Generalizada
está constituida por una plataforma móvil con varios grados de libertad, unida a una plataforma fija por medio de varias cadenas cinemáticas en paralelo, constituidas por actuadores lineales de longitud variable.
Fig. III-2 Plataforma de Gough

Manipuladores Paralelos
38
Fig. III-3 Plataforma de Stewart inicial, esquema
Fig. III-4 Plataforma de Stewart inicial, prototipo

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
39
En el estudio de los manipuladores paralelos, varios investigadores, como [BEN. 96-2], [CLA 91], [MER. 87] a [MER. 90/97], [STA. 97], analizan los siguientes puntos:
- Estudio cinemático directo de posición. - Estudio cinemático inverso de posición. - Configuraciones singulares. - Espacio de trabajo. - Análisis cinemático de velocidades y aceleraciones. - Cálculo estático. - Cálculo dinámico.
En el estudio cinemático directo, se determina la posición de la
plataforma móvil, conociendo las coordenadas articulares de los actuadores. Por ejemplo, se determina la posición de la plataforma móvil conociendo la longitud de los actuadores lineales que unen la plataforma fija y la móvil. Este estudio suele ser complejo ya que para unas determinadas coordenadas articulares el manipulador puede adquirir varias configuraciones diferentes.
En el estudio cinemático inverso, se determinan las coordenadas
articulares de los actuadores para conseguir una determinada posición de la plataforma móvil. Por ejemplo, se calculan las longitudes de los actuadores rectilíneos para una determinada posición de la plataforma móvil. Este estudio suele resultar más sencillo que el cinemático directo; aunque a veces las coordenadas articulares admiten dos soluciones para una posición de la plataforma móvil, por ejemplo cuando los actuadores son giratorios.
En las configuraciones singulares, por lo general, se estudian aquellas
posiciones del manipulador en las que aparece algún grado de libertad más de los que tiene el manipulador controlados por los actuadores. Por lo tanto, en las proximidades de esa posición, el manipulador tiene algún movimiento incontrolado. Este tipo de configuraciones singulares hay que evitarlas en la zona de trabajo en la que se va a utilizar el manipulador. También algunos investigadores, que se verán en el Capítulo IV, estudian configuraciones singulares en las que se pierde algún grado de libertad, es decir el órgano terminal del manipulador permanece inmóvil para una determinada velocidad articular.
En el estudio del espacio de trabajo se determina las posiciones que
puede alcanzar, por ejemplo, el centro de gravedad de la plataforma móvil para una determinada orientación de la misma y también los ángulos máximos que puede girar la plataforma para una determinada posición de su centro de gravedad.

Manipuladores Paralelos
40
En el análisis de velocidades y aceleraciones, se calculan las velocidades y aceleraciones de puntos de la plataforma móvil en función de las velocidades y aceleraciones articulares de los actuadores. Por ejemplo el cálculo de la velocidad y aceleración del centro de gravedad de la plataforma móvil, conociendo las velocidades y aceleraciones articulares de los actuadores lineales.
En el cálculo estático se determinan las fuerzas que hará cada actuador
para equilibrar una determinada resultante y a un par que actúen sobre la plataforma móvil.
Finalmente, en el problema dinámico se relacionan fuerzas y aceleraciones. Este puede ser dinámico inverso o directo. En el inverso, se conocen las velocidades y aceleraciones de unos puntos determinados del manipulador y se deben calcular las fuerzas que deben ejercer los actuadores para conseguir el movimiento previsto. En el dinámico directo, se conocen las fuerzas que ejercen los actuadores y se debe calcular las aceleraciones que adquirirá el manipulador. En ambos casos, se pueden calcular toda una serie de fuerzas de restricción que aparecerán en los puntos de unión de los eslabones del mecanismo.
En el estudio dinámico directo, se pueden ir integrando en el tiempo
las aceleraciones y velocidades para obtener nuevas velocidades y posiciones a partir de unas velocidades y posición iniciales, consiguiendo así una simulación dinámica.
III.2.1 � Manipuladores paralelos 6-RKS Aparte de la Plataforma de Stewart, en la familia de manipuladores
paralelos existen infinidad de tipos diferentes. Por ejemplo, manipuladores paralelos planos, espaciales y entre los espaciales de tres, cuatro, cinco y seis grados de libertad, con sus características cinemáticas y dinámicas propias. Un tipo de estos mecanismos es el "Manipulador Paralelo 6-RKS" (Fig. III-5) propuesto por Hunt [HUN. 83], sobre el que se centrarán los capítulos siguientes de esta tesis.
Estos mecanismos se caracterizan por estar constituidos por una
plataforma móvil, con seis grados de libertad, unida a una plataforma fija por medio de seis cadenas cinemáticas formadas por actuador giratorio, manivela y biela.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
41
Fig. III-5 Manipulador paralelo 6-RKS de Hunt Los actuadores giratorios "R" están montados sobre la plataforma fija,
las manivelas están montadas sobre los ejes de los actuadores y las bielas están conectadas por un extremo al extremo de la manivela por medio de una junta cardan "K" y por el otro extremo a la plataforma móvil por medio de una junta esférica "S".
Sobre este tipo de robots aparte del diseño realizado por Hunt
[HUN. 83] se han realizado algunos estudios, conociéndose los realizados por:
- Pierrot; Dauchez, Fraisse, Begon, Fournier, Uchiyama, Iimura, Unno, Toyama, etc.
- Zamanov de la Universidad Técnica de Sofía (Bulgaria). - Plitea, Giordano y Benea. - Takeda, Funabashi e Ichimaru. - Zanganeh, Sinatra y Angeles.

Manipuladores Paralelos
42
Pierrot, Dauchez, Fraisse, Begon y Fournier de la Universidad de Montpellier II (Francia), Uchiyama e Iimura de la Universidad de Tohoku (Japón) y Unno y Toyama de la empresa Toyoda Machine Works, Ltd. [PIE. 90], [PIE. 91-1], [PIE. 91-2], [PIE. 91-3], [PIE. 92-1], [PIE. 92-2], [UCH. 92], [BEG. 93], [TOY. 93], [BEG. 95], desarrollaron el robot paralelo de 6 grados de libertad HEXA (Fig. III-6) como generalización del robot de tres grados de libertad DELTA desarrollado por Clavel de la Escuela Técnica Federal de Lausana (Suiza) [CLA. 88] (Fig. III-7). Estos manipuladores tienen la estructura del manipulador paralelo 6-RKS de Hunt, no obstante, debido a las dimensiones de las manivelas y de la plataforma móvil, no poseen, y sus autores tampoco han puesto de manifiesto, las características cinemáticas del modelo que se verá en los capítulos siguientes.
Fig. III-6 Manipulador paralelo Hexa

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
43
Fig. III-7 Manipulador paralelo Delta El profesor Zamanov de la Universidad Técnica de Sofía (Bulgaria) ha
diseñado y construido un prototipo de estructura parecida al manipulador 6-RKS de Hunt (Fig. III-8), pero con la dirección de los ejes de los actuadores diferente, con lo que cambian algunas características cinemáticas.
Fig. III-8 Manipulador paralelo de Zamanov

Manipuladores Paralelos
44
Los estudios realizados en la Universidad de Savoia (Francia) por Giordano y en la Universidad Técnica de Cluj-Napoca (Rumania) por Benea y Plitea [PLI. 94], [GIO. 95], [BEN. 96-1], [BEN. 96-2] sobre un manipulador paralelo 6-RKS (Fig. III-9 y III-10) siguen la estructura clásica de los estudios realizados sobre los manipuladores paralelos: estudio de posición directo e inverso, configuraciones singulares, espacio de trabajo, estática y dinámica.
La composición de las cadenas cinemáticas de unión de las
plataformas son las mismas que las del manipulador propuesto por Hunt, pero la disposición de los actuadores es diferente, por lo que varían bastante las características cinemáticas respecto de las del manipulador de Hunt.
Fig. III-9 Manipulador 6-RKS estudiado por Benea, esquema

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
45
Fig. III-10 Manipulador 6-RKS estudiado por Benea, prototipo Takeda y Funabashi, del Instituto Tecnológico de Tokio, e Ichimaru,
de la empresa Sumimoto Steel Corporation, [TAK. 97] han construido y estudiado un prototipo basado en la estructura 6-RKS de Hunt (Fig. III-11 y III-12). En el trabajo referenciado, realizan una optimización de las dimensiones del mecanismo basándose en el índice de transmisión; pero no realizan un estudio de las características cinemáticas del manipulador.

Manipuladores Paralelos
46
Fig. III-11 Manipulador 6-RKS de Takeda, esquema
Fig. III-12 Manipulador 6-RKS de Takeda, prototipo

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
47
Zanganeh de la Universidad de Toronto (Canadá), Sinatra de la Universidad de Catania (Italia) y Angeles de la Universidad McGill de Montreal (Canadá) [ZAN. 97] realizan un estudio cinemático y dinámico de un manipulador que tiene la misma estructura que el 6-RKS de Hunt (Fig. III-13), pero no abordan el tema de características cinemáticas del manipulador.
Fig. III-13 Manipulador 6-RKS de Zanganeh
III.2.1.1 � Características de los manipuladores paralelos 6-RKS Este tipo de manipuladores paralelos, al tener la plataforma superior e
inferior unidas por medio de cadenas cinemáticas de actuador giratorio, manivela y biela, tiene unas características cinemáticas y dinámicas propias. Características que no posee, por ejemplo, la plataforma de Stewart generalizada, ya que en ésta la unión entre las plataformas se realiza por medio de actuadores lineales.
Una característica cinemática de los manipuladores paralelos 6-RKS
es poseer configuraciones de insensitividad de posición (CIP). En estas configuraciones, las velocidades de los puntos de la plataforma móvil son nulas

Manipuladores Paralelos
48
independientemente de las velocidades articulares de los actuadores, poseyendo además una serie de ventajas que se pondrán de manifiesto en el Capítulo IV.
III.3 � CONCLUSIONES En este capítulo se ha realizado una aproximación al arte de los
manipuladores paralelos basados en la estructura 6-RKS propuesta por Hunt, y se ha introducido el concepto de utilidad de las configuraciones de insensitividad posición (CIP), característica cinemática ventajosa que posee este tipo de manipuladores, si tienen unas dimensiones apropiadas.
En los manipuladores 6-RKS conocidos, los investigadores que han
trabajado sobre ellos no han puesto de manifiesto las ventajas de las configuraciones de insensitividad de posición, bien porque debido a sus dimensiones no se pueden alcanzar o porque las han considerado perjudiciales, y por lo tanto, tratan de eliminarlas del espacio de trabajo del manipulador.

CAPÍTULO IV
CONFIGURACIONES DE INSENSITIVIDAD

Configuraciones de Insensitividad.
50

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
51
CAPÍTULO IV - CONFIGURACIONES DE
INSENSITIVIDAD En este capítulo se definen las configuraciones de insensitividad de
posición (CIP) del manipulador paralelo 6-RKS propuesto por Hunt. Se pone de manifiesto las ventajas de las (CIP), determinando el número de configuraciones de este tipo existente, y se propone un método numérico para lograrlas. También se definen las configuraciones de incertidumbre de posición (CIN) que es necesario eliminarlas del espacio de trabajo del manipulador por resultar perjudiciales o negativas.
IV.1 � INTRODUCCIÓN Los mecanismos planos de pistón-biela-manivela y manivela-
oscilador se utilizan en muchos automatismos: el primero cuando se necesita un movimiento rectilíneo y el segundo cuando se precisa un movimiento giratorio. Ambos son movimientos alternativos y parten de un movimiento giratorio continuo.
En estas aplicaciones, el movimiento giratorio continuo, en ambos
mecanismos, se introduce por el eslabón llamado manivela. En el mecanismo pistón-biela-manivela, el movimiento de salida será el del pistón, y en el mecanismo de manivela-oscilador será el del seguidor.
Ambos mecanismos se utilizan de forma extensa porque tienen la
peculiaridad de poseer, cada uno, dos configuraciones (llamadas también puntos límite, muertos o de volquete) [BUR. 79], [ERD. 91] y [SHI. 80], en las que la velocidad del pistón en uno o la velocidad del seguidor en el otro son nulas para cualquier valor de la velocidad de la manivela. Estas configuraciones se dan en el mecanismo pistón-biela-manivela cuando la manivela y la biela están alineadas, superpuestas o en prolongación (Fig. IV-1). En el mecanismo manivela-oscilador; estas configuraciones se dan cuando la manivela y el eslabón acoplador están alineados, en superposición o en prolongación (Fig. IV-2).
Estas configuraciones recibirán el nombre de "configuraciones de
insensitividad de posición" (CIP).

Configuraciones de Insensitividad.
52
Fig. IV-1 CIP en el mecanismo Pistón-Biela-Manivela
Fig. IV-2 CIP en el mecanismo Manivela-Oscilador

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
53
Estas CIP son configuraciones de gran precisión de posición para el pistón en el mecanismo pistón-biela-manivela, y para el eslabón seguidor en el mecanismo manivela-oscilador. En ellas, pequeños errores en la posición de las manivelas de entrada apenas influyen en la posición del pistón y del seguidor respectivamente, de ahí su calificativo de insensitividad de posición.
El ser nula la velocidad del eslabón de salida en las CIP supone una
gran ventaja cuando con estos mecanismos se realiza una carrera que finaliza en una detención. Así se aprovecha para detener el mecanismo en las CIP, cuando el eslabón de salida tiene velocidad nula, lo que hace que las fuerzas de inercia en el mecanismo sean reducidas. Ello es debido a que en ese momento la aceleración del eslabón de salida, por muy rápida que sea la detención, será la misma que si pasase por esa configuración sin detenerse; en cambio, la detención brusca del mecanismo en cualquier otra configuración donde la velocidad del eslabón de salida no es nula, producirá una aceleración muy elevada.
En las CIP citadas, el par de entrada en la manivela será nulo
independiente de las fuerzas o momentos aplicados al eslabón de salida. Esto es debido a que la reacción que aparece en la articulación de unión de la manivela y el eslabón acoplador tiene la dirección de la manivela.
De los párrafos anteriores se desprende que en los mecanismos de
pistón-biela-manivela y manivela oscilador las CIP descritas resultan positivas, y por ello, estos mecanismos se vienen empleando desde hace años en automatismos y máquinas, haciendo uso de sus CIP.
En los mecanismos planos, pueden existir "configuraciones de
incertidumbre de posición" (CIN), que suelen resultar perjudiciales o negativas, en las que el eslabón de salida puede realizar pequeños desplazamientos aunque el eslabón de entrada permanezca inmóvil, de ahí la incertidumbre de posición. También, el eslabón de salida puede tener una cierta velocidad, siendo nula la velocidad del eslabón de entrada. Un ejemplo de este tipo de CIN se puede dar en cualquiera de los mecanismos citados anteriormente si se introduce el movimiento por el pistón en uno o por el eslabón seguidor en el otro y se toma la manivela como eslabón de salida. En ambos casos, si no se toma ningún tipo de precaución, los mecanismos pueden quedar fuera de control en esas configuraciones, al surgir un nuevo grado de libertad para el eslabón de salida.

Configuraciones de Insensitividad.
54
IV.2 � CIP Y CIN EN MECANISMOS ESPACIALES En los mecanismos espaciales de un grado de libertad cabrá hablar de
una configuración de insensitividad de posición (CIP) cuando se tenga una configuración del mecanismo tal que, aunque se introduzca un movimiento con una velocidad cualquiera en el eslabón de entrada, el eslabón de salida permanezca inmóvil. De manera análoga, se hablará de una configuración de incertidumbre de posición (CIN) cuando el eslabón de salida pueda realizar determinados movimientos estando inmóvil el eslabón de entrada.
Para algunos mecanismos espaciales de un grado de libertad, basados
en el cuadrilátero articulado, muchos autores han estudiado, por razones varias, los límites de su espacio de trabajo, que son posiciones de los mecanismos en las que se producen las CIP. Entre dichos autores, cabe citar a Harrisberger [HAR. 64], Skreiner [SKR. 67], Freudenstein y Kiss [FRE. 69], Sticher [STI. 69], Botema [BOT. 70], Gupta y Radcliffe [GUP. 71], Freudenstein y Primrose [FRE. 76], Soylemez y Freudenstein [SOY. 82], Gupta y Kazerounian [GUP. 83], Sandor y Zhuang [SAN. 84], Tinubu y Gupta [TIN. 84], Alizade y Sandor [ALI. 85], Williams y Reinholtz [WIL. 87] y Rastegar y Tu [RAS. 92].
Hunt [HUN. 78/90] se refiere a este tipo de configuraciones en
mecanismos articulados planos y espaciales llamándolas "configuraciones estacionarias" a las aquí referidas como (CIP) y "configuraciones de incertidumbre" a las (CIN).
En los mecanismos planos o espaciales de varios grados de libertad, se
dará una CIP cuando el eslabón de salida permanezca inmóvil para una velocidad cualquiera de uno o varios eslabones de entrada. Del mismo modo, se tendrá una CIN cuando el eslabón de salida tenga algún movimiento estando inmóviles todos los eslabones de entrada.
En mecanismos de varios grados de libertad, autores como Uchiyama
[UCH. 79], Hunt [HUN. 82] y [HUN. 87], Sugimoto, Duffy y Hunt [SUG. 82] y Rastegar y Deravi [RAS. 87-1] y [RAS. 87-2], han realizado estudios sobre CIP en robots tipo serie. En estas configuraciones, un determinado punto del brazo del robot describe una superficie que suele ser, de alguna manera, límite del espacio de trabajo. Mientras ese punto determinado se encuentre en la superficie límite puede permanecer inmóvil independientemente del movimiento de algún actuador, perdiendo el robot algún grado de libertad. A estas configuraciones, normalmente las denominan como "configuraciones singulares" y las estudian como límites negativos del espacio de trabajo, no habiendo ningún estudio que se conozca en el que las consideren ventajosas.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
55
IV.2.1 � CIN y CIP en manipuladores paralelos En manipuladores paralelos de varios grados de libertad, desde que
Stewart [STE. 65] propuso su plataforma citando que tenía dos posibles posiciones de inestabilidad (positions of instability), es decir dos CIN, varios investigadores han realizado estudios sobre las CIP y las CIN de estos mecanismos. Así, Hunt [HUN. 83] cita dos posibles tipos de configuraciones (él las llama "special configurations"): un tipo se produce cuando la plataforma móvil permanece inmóvil aunque se introduzca algún movimiento por alguno o varios actuadores "stationary singularity" (lo que aquí se denomina CIP), y otro tipo en el que la plataforma móvil puede realizar pequeños desplazamientos aunque todos los actuadores permanezcan fijos "uncertainty singularity" (CIN).
Kokkinis y Stoughton [KOK. 88] estudian las CIP y CIN de un
manipulador paralelo de 3 grados de libertad, denominándolas, al igual que Hunt, "stationary singularity" y "uncertainty singularity".
Hunt, Samuel y McAree [HUN. 91] estudian las configuraciones
especiales para un tipo de manipulador con una mezcla de actuadores en serie y paralelo, utilizando los ejes instantáneos de rotación y deslizamiento. Determinan configuraciones en las que el eslabón de salida del manipulador pierde o gana algún grado de libertad (CIP) y (CIN) respectivamente, estudiando el conjunto de vectores que representan el giro y deslizamiento de los actuadores sobre los ejes instantáneos.
Merlet [MER. 88] estudia las CIN de varios manipuladores,
denominándolas configuraciones singulares, utilizando los vectores de Plücker y la geometría de Grassmann, con el fin de evitar esas configuraciones en el espacio de trabajo de los manipuladores. Por el mismo método autores como Mouly [MOU. 93], Collins y Long [COL. 94], Notash y Podhorodeski [NOT. 94], Pasqui-Boutard [PAS. 94], Long [LON. 97], Hao y McCarthy [HAO. 98] y Notash [NOT. 98], estudian fundamentalmente las CIN por medio de la geometría de Grassmann.
A su vez, Gosselin y Angeles [GOS 90-1] clasifican las CIP y CIN
(singularity), teniendo en cuenta los valores de los determinantes de las matrices que relacionan las velocidades articulares de los actuadores y las velocidades lineales y angulares de la plataforma móvil, en tres tipos:
- Tipo I, coincide con la CIP. - Tipo II, coincide con la CIN. - Tipo III, cuando una configuración es al mismo tiempo CIP y CIN.

Configuraciones de Insensitividad.
56
Siguiendo la clasificación de Gosselin y Angeles varios autores como Funabashi, Horie, Kubota y Takeda [FUN. 91], Uchiyama [UCH. 94], Sefrioui y Gosselin [SEF. 94] y [SEF. 95], Gosselin y Wang [GOS. 95] y [GOS. 97], Mohammadi, Zsombor-Murray y Ángeles [MOH. 95], Chablat y Wenger [CHA 96], St-Onge y Gosselin [ST-O. 96] y Wang y Gosselin [WAN.J. 97], estudian las CIP y CIN de diversos tipos de manipuladores paralelos.
Al mismo tiempo, Gosselin [GOS. 90-2] relaciona las configuraciones
singulares con los mapas de rigidez de la plataforma móvil en todo el espacio de trabajo de los manipuladores paralelos.
De forma análoga, Tahmasebi y Tsai [TAH. 93] clasifican las
configuraciones singulares en: "Inverse kinematics singularities" y "Direct kinematics singularities" que coinciden con las CIP y las CIN respectivamente, o con las singularidades Tipo I y Tipo II de Gosselin y Angeles. A continuación, estudian esas configuraciones para un manipulador paralelo de tres brazos y 6 grados de libertad.
Por otro lado, Basu y Ghosal [BAS 96] estudian configuraciones
singularidades de un manipulador paralelo basándose en el método geométrico de la tangente común para las velocidades de los puntos de dos eslabones coincidentes en una articulación. Suponiendo que se elimine dicha articulación, para que las velocidades de los dos puntos tengan tangente común, los eslabones unidos por dicha articulación deben estar contenidos en el mismo plano, condición que se da en las CIP y CIN.
Mientras, Zlatanov, Fenton y Benhabib [ZLA. 94-1] a [ZLA. 98],
estudian seis tipos de singularidades para varios manipuladores paralelos. Singularidades que, como normalmente se dan dos al mismo tiempo, coinciden aproximadamente con la clasificación de tres tipos hecha por Gosselin y Angeles.
Innocenti y Parenti-Castelli [INN. 92] estudian las singularidades y el
paso entre zonas del espacio de trabajo limitadas por superficies de configuraciones singulares tanto en robots serie como en manipuladores paralelos.
Por último, otros autores como Clavel [CLA. 89], [CLA. 91] y
[CLA. 94], Pierrot [PIE. 91-4], Kumar [KUM. 92], Lee y Kim [LEE. 93], Lui, Lewis, Lebret y Taylor [LIU. 93], Ait-Ahmed [AIT. 93], Fioretti [FIO 94], Wang [WAN.S. 94], Tadokoro [TAD. 94], Vischer [VIS. 95], Zsombor-Murray, Husty y Hartmann [ZSO. 95], Ferrand y Renaud [FER. 95], Takeda y Funabashi [TAK. 95] y [TAK. 96], Merlet [MER. 96], Funabashi y Takeda

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
57
[FUN. 97], Collins y McCarthy [COL. 97-1], [COL. 97-2] y [COL. 97-3], Nenchev y Uchiyama [NEN. 97-1] y [NEN. 98], Nenchev, Bhattacharya y Uchiyama [NEN 97-2], Dafaoui, Amirat, Pontnau y François [DAF. 98] y Dasgupta y Mruthyunjaya [DAS. 98-1] y [DAS. 98-2], han estudiado por algún método las CIP y CIN de algún manipulador paralelo.
No obstante, resulta importante constatar como, en los artículos
citados, se estudian normalmente con detenimiento las CIN con el fin de evitarlas en el espacio de trabajo y, como mucho, se cita que existen las CIP, sin hacer mención en ningún caso conocido, a su posible utilidad.
IV.2.1.1. - CIP y CIN en manipuladores paralelos 6-RKS Entre los estudios sobre configuraciones singulares CIP y CIN
realizados sobre manipuladores paralelos tipo 6-RKS, cabe señalar los siguientes:
- En el manipulador HEXA (Fig. III-6) por Pierrot, Uchiyama, Dauchez y
Fourier [PIE. 90], Pierrot, Dauchez y Fourier [PIE. 91-2] y [PIE. 91-3] y Uchiyama, Iimura, Pierrot, Dauchez, Unno y Toyama [UCH. 92]. En estos trabajos se estudian las configuraciones singulares distinguiendo dos tipos: "Undermobility", que coincide con las CIP, y "Overmobility", que coincide con las CIN. También, sobre este mismo manipulador, ha realizado estudios Begon [BEG. 95-2] basándose en los seis tipos de singularidades expuestos por Zlatanov y otros. Al final los reduce a dos tipos que los denomina: "Sous-movilité" y "Sur-movilité" que coinciden con las CIP y CIN respectivamente.
- En el prototipo construido y estudiado por Takeda, Funabashi e Ichimaru
[TAK. 97] (Fig. III-11 y III-12), realizan una optimización del manipulador y localizan las regiones de configuraciones singulares basándose en el índice de transmisión, índice que relaciona la velocidad angular de un actuador con la velocidad de la rótula de unión de la plataforma móvil con la biela correspondiente a ese actuador, y lo calculan para diferentes puntos del espacio de trabajo siguiendo un método aleatorio.
- En el prototipo 6-RKS estudiado por Plitea, Giordano y Benea
[BEN. 96-2] (Fig. III-9 y III-10), Benea realiza un estudio sobre las configuraciones singulares clasificándolas en Singularités de type 1 ("parallèles") que coinciden con las CIN y con las singularidades Tipo II de Gosselin y Angeles y Singularités de type 2 ("série") que coinciden con las CIP y con las singularidades Tipo I de Gosselin y Angeles. Para la

Configuraciones de Insensitividad.
58
localización de las singularidades utiliza un método numérico de cálculo del valor del determinante de la matriz jacobiana haciendo un mallado a través del espacio de trabajo que puede alcanzar la plataforma móvil. Como conclusiones, cita que se han encontrado 26 = 64 posiciones de singularidad que deberían poder ser evitadas.
En esta tesis se obtendrán las CIP por un método directo de paso de
una configuración a otra siguiendo un orden preestablecido. Además, se pondrá de manifiesto las ventajas de estas configuraciones, al contrario que los autores anteriores que las determinan con el fin de eliminarlas del espacio de trabajo.
IV.3 - CIP EN MANIPULADORES PARALELOS 6-RKS El Manipulador Paralelo 6-RKS de Hunt (Fig. IV-3 y IV-4) está
formado por una plataforma inferior fija sobre la que están montados seis actuadores con movimiento giratorio, y cuyos ejes de giro se encuentran en un plano paralelo a dicha plataforma, y una plataforma superior móvil conectada a los actuadores por medio de seis cadenas cinemáticas biela-manivela.
Fig. IV-3 Manipulador Paralelo 6-RKS de Hunt Los actuadores "R" están montados sobre la plataforma inferior, en los
lados de un imaginario triángulo. La plataforma superior también es un triángulo, en cada uno de cuyos vértices están conectadas dos bielas. Las bielas
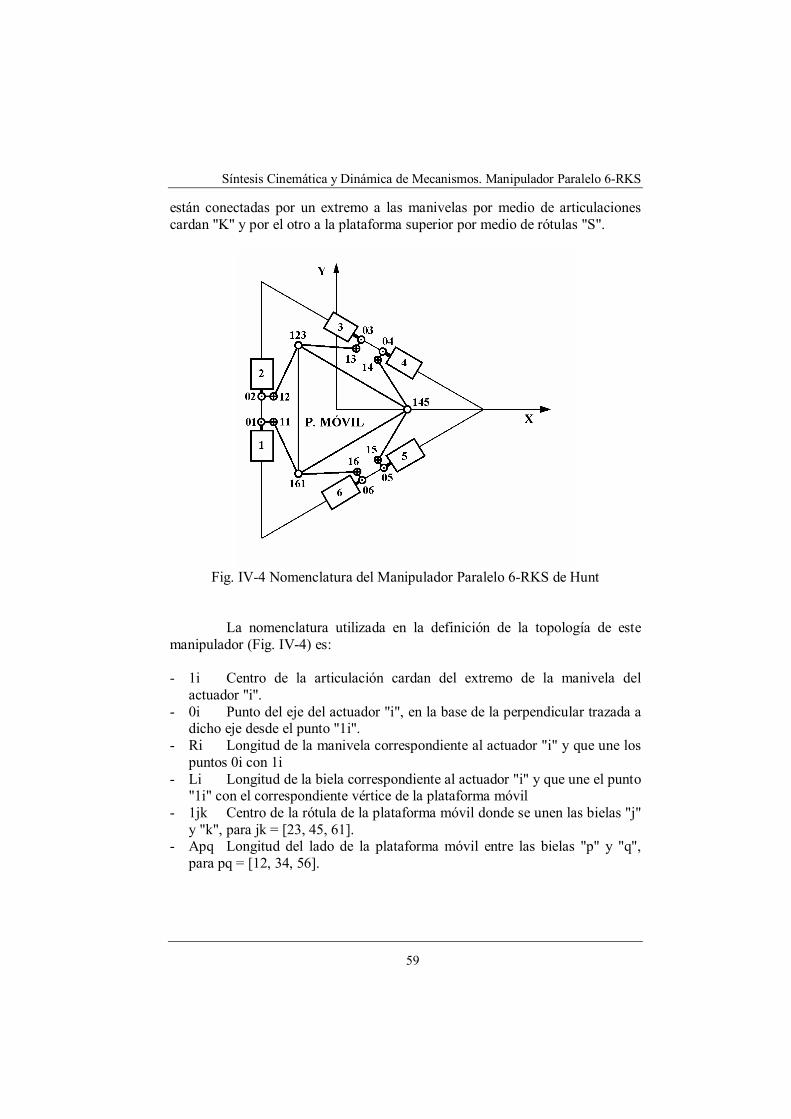
Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
59
están conectadas por un extremo a las manivelas por medio de articulaciones cardan "K" y por el otro a la plataforma superior por medio de rótulas "S".
Fig. IV-4 Nomenclatura del Manipulador Paralelo 6-RKS de Hunt
La nomenclatura utilizada en la definición de la topología de este
manipulador (Fig. IV-4) es:
- 1i Centro de la articulación cardan del extremo de la manivela del actuador "i".
- 0i Punto del eje del actuador "i", en la base de la perpendicular trazada a dicho eje desde el punto "1i".
- Ri Longitud de la manivela correspondiente al actuador "i" y que une los puntos 0i con 1i
- Li Longitud de la biela correspondiente al actuador "i" y que une el punto "1i" con el correspondiente vértice de la plataforma móvil
- 1jk Centro de la rótula de la plataforma móvil donde se unen las bielas "j" y "k", para jk = [23, 45, 61].
- Apq Longitud del lado de la plataforma móvil entre las bielas "p" y "q", para pq = [12, 34, 56].

Configuraciones de Insensitividad.
60
Como una generalización de las configuraciones de insensitividad de posición (CIP) de los mecanismos planos de pistón-biela-manivela y manivela-oscilador, al estar constituida la estructura de los manipuladores 6-RKS por dos plataformas unidas por varias cadenas de actuador-manivela-biela, es lógico suponer que estos mecanismos poseerán CIP [ZAB. 99]. Estas configuraciones se darán cuando la posición de alguna cadena sea tal que el eje del actuador, la manivela y la biela se encuentren en el mismo plano. Esta posición de la cadena se denominará posición de insensitividad (PI).
De alguna manera, esta condición ya fue planteada por Harrisberger
[HAR. 64] y Freudenstein y Kiss [FRE. 69] como condición para determinar la posición límite en un cuadrilátero articulado espacial, por Nombrail [NOM. 93] al estudiar las singularidades tipo serie en los manipuladores con actuadores rotativos y por Benea [BEN. 96-2] al estudiar las singularidades tipo 2 ("Serie") en un manipulador 6-RKS.
Analizando las posibles posiciones del eje del actuador, la manivela y
la biela, se observa que cada cadena tendrá dos posiciones de insensitividad (PI) por encima de la plataforma fija: una cuando la manivela y biela estén casi en prolongación y otra cuando estén casi superpuestas (Fig. IV-5)4.
Fig. IV-5 Posiciones de Insensitividad sobre la Plataforma Fija
4 Se ha supuesto, en todos los desarrollos a lo largo de esta tesis, que la longitud de la biela es mayor que la de la manivela.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
61
Cada cadena actuador-manivela-biela también tendrá dos PI similares a las anteriores por debajo de la plataforma fija (Fig. IV-6); pero estas dos posiciones normalmente no se utilizarán ya que, por lo general, no se podrán alcanzar sin desmontar el manipulador.
Fig. IV-6 Posiciones de Insensitividad bajo la Plataforma Fija
IV.3.1 - Configuraciones de insensitividad total y parcial El manipulador paralelo 6-RKS se encontrará en una configuración de
insensitividad total cuando sus seis cadenas cinemáticas de unión de las plataformas se encuentren en posición de insensitividad. En estas configuraciones, la plataforma móvil permanecerá fija aunque se introduzca movimiento por todos los actuadores. Y se encontrará en una configuración de insensitividad parcial cuando solamente algunas cadenas se encuentren en posición de insensitividad. En estos casos, la plataforma móvil permanecerá fija si el movimiento se introduce por los actuadores cuya cadena cinemática correspondiente se encuentre en posición de insensitividad.
Este manipulador tiene seis cadenas actuador-manivela-biela y cada
una tiene cuatro PI. Por lo tanto, cabría hablar teóricamente de 46 = 4096 posibles CIP totales (CIP-6) de la plataforma móvil frente a movimientos de todos los actuadores.
Sin embargo, si solamente se tienen en cuenta las dos posibles PI de
cada cadena sobre la plataforma fija (Fig. IV-5), ya que las combinaciones de PI

Configuraciones de Insensitividad.
62
sobre la plataforma con PI bajo la plataforma normalmente serán imposibles debido a la interferencia física de la plataforma móvil con la fija, se obtienen 26 = 64 CIP-6 de la plataforma fija. Valor que coincide con las 64 configuraciones de singularidad tipo 2 (serie) encontradas por Benea haciendo un mallado del espacio de trabajo del manipulador y calculando el valor del determinante de la matriz jacobiana que relaciona las velocidades articulares de los actuadores con las velocidades de la plataforma móvil.
Estas 64 CIP-6 de insensitividad total son configuraciones puntuales,
encontrándose los vértices de la plataforma móvil en la intersección de las superficies que describen los extremos de las bielas cuando su cadena correspondiente se encuentra en PI. También, como se verá más adelante, sobre estas superficies se encontrarán los vértices de la plataforma móvil correspondientes a las cadenas en PI en las CIP parciales del manipulador. Por lo tanto las CIP-6 se pueden considerar como intersección de CIP parciales.
Analizando el movimiento del extremo de la biela unido a la
plataforma móvil, es fácil deducir que las cuatro posibles PI de cada cadena actuador-manivela-biela se dan cuando el extremo de la biela está contenida en la superficie toroidal (Figs. IV-7 y IV-8). Esto es debido a que el extremo de la manivela describe una circunferencia contenida en un plano perpendicular al eje del actuador y a partir de esa circunferencia el extremo de la biela describe otra circunferencia contenida en el plano del eje del actuador y de la manivela, por lo tanto, contenida en un plano perpendicular en cada punto a la circunferencia primera, condiciones que cumplen las superficies toroidales.
Fig. IV-7 Superficie toroidal del extremo de la biela, sección

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
63
Fig. IV-8 Superficie toroidal del extremo de la biela, perspectiva Las dos PI sobre la plataforma, se dan cuando el extremo de la biela
está contenida en la superficie de la parte del toro que queda sobre la plataforma fija.
Considerando solamente el volumen del toro sobre la plataforma fija,
que será la zona donde realmente se podrá encontrar el vértice de la plataforma móvil correspondiente, si la cadena actuador-manivela-biela se encuentra en (PI), habrá dos posibles superficies donde se pueda encontrar dicho vértice, que serán las dos superficies toroidales (Fig. IV-9).
Fig. IV-9 Superficies toroidales sobre la plataforma fija

Configuraciones de Insensitividad.
64
Considerando todas las posibles PI de las seis cadenas, se podrán obtener 6 x 2 = 12 CIP en las que la plataforma móvil permanecerá fija si solamente se introduce movimiento por el actuador correspondiente a la cadena que se encuentre en PI, independientemente de la posición de los otros actuadores. Este tipo de configuración se denomina CPI-1, y en ellas el extremo de la biela en PI se encontrará en una porción de una superficie toroidal, dependiendo su posición de las posiciones de los otros actuadores. Por eso, estas CIP se consideran superficiales.
Para combinaciones de dos cadenas en PI habrá 60 CIP-2, en las que
la plataforma móvil permanecerá fija para entradas de movimiento simultáneo por dos actuadores cuyas cadenas correspondientes se encuentre en PI. De estas 60 CIP-2 habrá 48 que son superficiales, en las que el extremo de cada biela se encontrará sobre una porción de su superficie toroidal correspondiente, y 12 lineales, que se producirán cuando las cadenas actuador-manivela-biela en PI vayan unidas a un mismo vértice de la plataforma móvil. En este caso los extremos de las bielas en PI se encontrarán sobre las líneas de intersección de las superficies toroidales correspondientes (Figs. IV-10 y IV-11).
Fig. IV-10 Intersección de dos superficies toroidales con el plano horizontal

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
65
Fig. IV-11 Intersección de dos superficies toroidales, dos vistas Siguiendo con el razonamiento de los párrafos anteriores, se pueden
encontrar 120 CIP-3, 240 CIP-4 y 192 CIP-5, en las que los extremos de las bielas correspondientes a las cadenas que se encuentren en PI estarán situados en líneas o superficies, según vayan los extremos de esas bielas a unirse al mismo punto de la plataforma móvil o no. En estos casos la plataforma superior permanecerá inmóvil cuando se introduzca un determinado movimiento simultáneo por 3, 4 ó 5 manivelas adecuadas. Finalmente se tiene las 64 citadas CIP-6 ó CIP totales y que son las que en adelante se denominarán CIP.
Las 64 CIP son configuraciones de gran precisión de posición de la
plataforma superior móvil, pequeños errores en la posición de los actuadores apenas influyen en la posición de la plataforma móvil. En estas configuraciones se puede detener el manipulador evitando la aparición de grandes fuerzas de inercia debidas a las aceleraciones de detención. Y además los pares que aparecen en los ejes de los actuadores son nulos.

Configuraciones de Insensitividad.
66
De forma similar a las aplicaciones de los mecanismos de pistón-biela-manivela y manivela-oscilador en los que se aprovechan las CIP, los manipuladores basados en el 6-RKS de Hunt se pueden utilizar para posicionar piezas o herramientas cuyas diversas posiciones necesarias coincidan con las CIP del manipulador.
Aparte de estas 64 CIP, en el manipulador existen otras
configuraciones de incertidumbre de posición de la plataforma móvil; es decir, que la plataforma móvil puede realizar pequeños desplazamientos aunque los actuadores permanezcan inmóviles. Estas configuraciones son las llamadas CIN, y han sido ya objeto de estudio por un gran número de investigadores. Son configuraciones indeseables en el espacio de trabajo del manipulador ya que introducen grados de libertad adicionales al sistema, y en esta tesis no se entra en su estudio.
IV.3.2 - Determinación de las 64 CIP del Manipulador 6-RKS A lo largo de este subapartado, se llevará a cabo la determinación
analítica de las 64 CIP utilizando las coordenadas naturales definidas por García de Jalón y Bayo [GAR. 94] y tomando como origen de un único sistema de coordenadas el baricentro del triángulo formado por los ejes de los actuadores montados sobre la plataforma fija, con los ejes "X" e "Y" contenidos en el plano de los ejes de los actuadores, y con el eje "Y" paralelo al eje de los actuadores "1" y "2", (fig. IV-3).
Suponiendo conocidas las posiciones de los actuadores y las
longitudes de las manivelas, bielas y lados del triángulo de la plataforma móvil, y utilizando la nomenclatura introducida en el apartado IV-3. Para las longitudes constantes de las manivelas se pueden establecer las siguientes condiciones de restricción:
( ) ( ) ( ) 0RZZYYXX 2
12
01112
01112
0111 =−−+−+− (IV-1) ( ) ( ) ( ) 0RZZYYXX 2
22
02122
02122
0212 =−−+−+− (IV-2) ( ) ( ) ( ) 0RZZYYXX 2
32
03132
03132
0313 =−−+−+− (IV-3) ( ) ( ) ( ) 0RZZYYXX 2
42
04142
04142
0414 =−−+−+− (IV-4) ( ) ( ) ( ) 0RZZYYXX 2
52
05152
05152
0515 =−−+−+− (IV-5) ( ) ( ) ( ) 0RZZYYXX 2
62
06162
06162
0616 =−−+−+− (IV-6)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
67
Para evitar, en lo posible, la interferencia de la biela con el eje del actuador la manivela ha de tener una cierta inclinación tal y como se observa en la Fig. IV-12. Por ello, los puntos 01 a 06 no son propiamente los de unión de las manivelas con los ejes de los actuadores, sino que están sobre las perpendiculares a dichos ejes trazadas desde los puntos de unión biela-manivela y se toman así para simplificar los cálculos.
Fig. IV-12 Puntos de unión manivela-eje del actuador
De forma análoga, para las longitudes constantes de las bielas se establecen las siguientes condiciones de restricción:
( ) ( ) ( ) 0LZZYYXX 2
12
111612
111612
11161 =−−+−+− (IV-7) ( ) ( ) ( ) 0LZZYYXX 2
22
121232
121232
12123 =−−+−+− (IV-8) ( ) ( ) ( ) 0LZZYYXX 2
32
131232
131232
13123 =−−+−+− (IV-9) ( ) ( ) ( ) 0LZZYYXX 2
42
141452
141452
14145 =−−+−+− (IV-10) ( ) ( ) ( ) 0LZZYYXX 2
52
151452
151452
15145 =−−+−+− (IV-11) ( ) ( ) ( ) 0LZZYYXX 2
62
161612
161612
16161 =−−+−+− (IV-12) A su vez, para las longitudes constantes de los lados del triángulo de
la plataforma móvil se tendrá:
( ) ( ) ( ) 0AZZYYXX 212
2123161
2123161
2123161 =−−+−+− (IV-13)
( ) ( ) ( ) 0AZZYYXX 234
2123145
2123145
2123145 =−−+−+− (IV-14)
( ) ( ) ( ) 0AZZYYXX 256
2145161
2145161
2145161 =−−+−+− (IV-15)

Configuraciones de Insensitividad.
68
Los puntos 11 a 16, que son los extremos de las manivelas, describen circunferencias en planos perpendiculares a los ejes de los actuadores (Fig. IV-4). Para expresar la perpendicularidad entre el radio de la circunferencia y el eje del actuador correspondiente, teniendo en cuenta que los ejes de los actuadores "1" y "2" son coincidentes y lo mismo ocurre para los actuadores "3" y "4" y para los actuadores "5" y "6", se plantean las condiciones de restricción siguientes:
0)ZZ)·(ZZ()YY)·(YY()XX)·(XX(
01020111
0102011101020111
=−−+−−+−−
(IV-16)
0)ZZ)·(ZZ()YY)·(YY()XX)·(XX(
01020212
0102021201020212
=−−+−−+−−
(IV-17)
0)ZZ)·(ZZ()YY)·(YY()XX)·(XX(
03040313
0304031303040313
=−−+−−+−−
(IV-18)
0)ZZ)·(ZZ()YY)·(YY()XX)·(XX(
03040414
0304041403040414
=−−+−−+−−
(IV-19)
0)ZZ)·(ZZ()YY)·(YY()XX)·(XX(
05060515
0506051505060515
=−−+−−+−−
(IV-20)
0)ZZ)·(ZZ()YY)·(YY()XX)·(XX(
05060616
0506061605060616
=−−+−−+−−
(IV-21)
Finalmente, cada cadena cinemática actuador-manivela-biela estará en
posición de insensitividad cuando el producto mixto de tres vectores orientados respectivamente según el eje del actuador, la manivela y la biela sea cero, ya que los tres deben estar contenidos en el mismo plano:
0)XX)·(YY)·(ZZ()YY)·(XX)·(ZZ()ZZ)·(XX)·(YY()XX)·(ZZ)·(YY()YY)·(ZZ)·(XX()ZZ)·(YY)·(XX(
11161011101021116101110102
11161011101021116101110102
11161011101021116101110102
=−−−−−−−+−−−−−−−+−−−−−−−
(IV-22)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
69
0)XX)·(YY)·(ZZ()YY)·(XX)·(ZZ()ZZ)·(XX)·(YY()XX)·(ZZ)·(YY()YY)·(ZZ)·(XX()ZZ)·(YY)·(XX(
12123021201021212302120102
12123021201021212302120102
12123021201021212302120102
=−−−−−−−+−−−−−−−+−−−−−−−
(IV-23)
0)XX)·(YY)·(ZZ()YY)·(XX)·(ZZ()ZZ)·(XX)·(YY()XX)·(ZZ)·(YY()YY)·(ZZ)·(XX()ZZ)·(YY)·(XX(
13123031303041312303130304
13123031303041312303130304
13123031303041312303130304
=−−−−−−−+−−−−−−−+−−−−−−−
(IV-24)
0)XX)·(YY)·(ZZ()YY)·(XX)·(ZZ()ZZ)·(XX)·(YY()XX)·(ZZ)·(YY()YY)·(ZZ)·(XX()ZZ)·(YY)·(XX(
14145041403041414504140304
14145041403041414504140304
14145041403041414504140304
=−−−−−−−+−−−−−−−+−−−−−−−
(IV-25)
0)XX)·(YY)·(ZZ()YY)·(XX)·(ZZ()ZZ)·(XX)·(YY()XX)·(ZZ)·(YY()YY)·(ZZ)·(XX()ZZ)·(YY)·(XX(
15145051505061514505150506
15145051505061514505150506
15145051505061514505150506
=−−−−−−−+−−−−−−−+−−−−−−−
(IV-26)
0)XX)·(YY)·(ZZ()YY)·(XX)·(ZZ()ZZ)·(XX)·(YY()XX)·(ZZ)·(YY()YY)·(ZZ)·(XX()ZZ)·(YY)·(XX(
16161061605061616106160506
16161061605061616106160506
16161061605061616106160506
=−−−−−−−+−−−−−−−+−−−−−−−
(IV-27)
Las condiciones de restricción anteriores, ecuaciones de la (IV-1) a la
(IV-27), forman un sistema de 27 ecuaciones, con 27 incógnitas, que debe cumplir el manipulador para estar en una configuración de insensitividad de posición CIP, y que se pueden expresar abreviadamente como:
Φ(q) = 0 (IV-28)

Configuraciones de Insensitividad.
70
siendo "q" el vector de las 27 incógnitas correspondientes a las coordenadas "X", "Y" y "Z" de los tres vértices de la plataforma móvil (puntos 123, 145 y 161) y de los extremos de las seis manivelas (puntos 11 a 16).
Sistema de ecuaciones que se resolverá mediante la aplicación del
método de Newton-Raphson.
Φ (qi ) = Φq(qi )·( qi - q 1i+ ) (IV-29) Tomando una posición aproximada de los puntos de unión de las
manivelas con las bielas y de los vértices de la plataforma móvil para iniciar la primera iteración, se logra una CIP. Determinada una CIP, para ir calculando el resto, se gira una manivela 180º, por ejemplo en 6 etapas de 30º, haciendo que las otras cinco cadenas actuador-manivela-biela se coloquen en PI al final de cada etapa. Partiendo de esta configuración, en la que se tiene cinco cadenas actuador-manivela-biela en posición de insensitividad y un conjunto girado 180º, de nuevo por Newton-Raphson, se localiza una nueva CIP de la plataforma móvil. Repitiendo esta operación con todas las cadenas actuador-manivela-biela las veces necesarias, y siguiendo un orden preestablecido, se consiguen las 64 CIP de la plataforma móvil.
El giro de la manivela de la cadena que se quiere pasar de una PI a
otra, se hace en varias etapas debido a que si, por ejemplo, se efectúa un giro de 180º de una sola vez, al buscar la nueva CIP del manipulador por el método de Newton-Raphson, la solución no converge a la nueva configuración deseada sino a la configuración anterior, o sea a la configuración de la que se ha partido. Esto es debido a que la solución encontrada por el método de Newton-Raphson depende de los valores con los que se inicie la iteración, de ahí la importancia de tomar unos valores iniciales lo más próximos posibles a la solución buscada.
IV.3.3 - Comprobación de las 64 configuraciones logradas La comprobación de que las configuraciones logradas son CIP se hace
determinando que las velocidades de los vértices de la plataforma móvil son nulas independientemente de las velocidades de giro de los actuadores, o lo que es lo mismo, de las velocidades de los extremos de las manivelas (puntos 11 a 16).
Tomando las seis ecuaciones de restricción (IV-7) a (IV-12) de
longitud constante de las bielas y las tres de longitud constante de los lados de la plataforma móvil (IV-13) a (IV-15), derivándolas respecto del tiempo y ordenando los términos se llega al siguiente sistema de ecuaciones:

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
71
−−−−−−
−−−−−−
−−−−−−
−−−
−−−
−−−
−−−
−−−
−−−
Z
Y
X
Z
Y
X
Z
Y
X
·
ZZYYXXZZYYXX000
000ZZYYXXZZYYXX
ZZYYXX000ZZYYXX
ZZYYXX000000ZZYYXX000000
000ZZYYXX000
000ZZYYXX000
000000ZZYYXX
000000ZZYYXX
161
161
161
145
145
145
123
123
123
145161145161145161161145161145161145
123145123145123145145123145123145123
123161123161123161161123161123161123
111611116111161
161611616116161
151451514515145
141451414514145
131231312313123
121231212312123
&
&
&
&
&
&
&
&
&
=
=
−+−+−
−+−+−
−+−+−
−+−+−
−+−+−
−+−+−
0
0
0Z)·ZZ(Y)·YY(X)·XX(Z)·ZZ(Y)·YY(X)·XX(Z)·ZZ(Y)·YY(X)·XX(Z)·ZZ(Y)·YY(X)·XX(Z)·ZZ(Y)·YY(X)·XX(Z)·ZZ(Y)·YY(X)·XX(
111116111111611111161
161616116161611616161
151514515151451515145
141414514141451414145
131312313131231313123
121212312121231212123
&&&
&&&
&&&
&&&
&&&
&&&
(IV-30)
El sistema de ecuaciones (IV-30) relaciona las velocidades de los
vértices de la plataforma móvil con las velocidades de los puntos extremos de las manivelas. Tomando, por ejemplo, la primera fila de este sistema de ecuaciones:
Z)·ZZ(Y)·YY(X)·XX( Z)·ZZ(Y)·YY(X)·XX(
121212312121231212123
123121231231212312312123
&&&
&&&
−+−+−==−+−+−
(IV-31)
Se observa que el término de la derecha es cero si la cadena "2" se
encuentra en PI, ya que es el desarrollo del producto escalar de un vector en la dirección de la biela "2" con el vector velocidad del extremo de la manivela "2". La velocidad del extremo de la manivela es perpendicular a ésta y al eje del actuador, por lo tanto perpendicular al plano formado por ellos, y en el que estará contenida la biela.
Luego, si el término de la derecha es nulo, deben ser nulas las
velocidades X123& , Y123& y Z123& del vértice de la plataforma, ya que el término de

Configuraciones de Insensitividad.
72
la izquierda de la ecuación representa el desarrollo del producto escalar de un vector en la dirección de la biela "2", con el vector velocidad del punto "123" que son dos vectores cuyo producto escalar no tiene por que ser nulo.
En efecto, el vector velocidad del extremo de una biela, como ésta no
gira alrededor de un punto fijo como la manivela, sino que su movimiento viene impuesto por las otras cinco cadenas cinemáticas actuador-manivela-biela, en principio puede tener cualquier dirección. Por lo tanto, si el producto escalar del vector velocidad con un vector no nulo en la dirección de la biela es cero, en el caso más general, debe ser cero el vector velocidad.
Haciendo este mismo razonamiento con las seis primeras filas del
sistema de ecuaciones (IV-30) se llega a la conclusión que si el eje del actuador, la manivela y la biela se encuentran en el mismo plano, esa cadena cinemática se encuentra en PI, y si se cumple para las seis cadenas a la vez, el manipulador se encontrará en una CIP.
IV.4 - EJEMPLO NUMÉRICO
En este apartado, por medio del programa INSENSI5, se calcularán las 64 configuraciones de insensitividad de posición (CIP) de la plataforma móvil para un manipulador de unas dimensiones dadas y se demostrará que las CIP logradas, comprobándolo para dos de ellas, son realmente de insensitividad. Para ello, dadas unas determinadas velocidades giratorias de las manivelas, se calcularán las velocidades de los vértices de la plataforma móvil en las dos CIP, comprobándose que son nulas.
Para determinar las 64 CIP, se toma un manipulador paralelo 6-RKS (Fig. IV-13) en el que los ejes de los actuadores montados sobre la plataforma fija forman un triángulo equilátero de un metro de lado. Los actuadores están montados simétricamente respecto de los ejes de simetría del triángulo, siendo 0.1 metros la distancia entre los puntos de las manivelas que están sobre los ejes de los actuadores de un mismo lado del triángulo, o sea las distancias de los puntos "01" a "02", "03" a "04" y "05" a "06". Las manivelas son todas iguales con una longitud de 0.1 metros, las bielas son también todas iguales de 0.6 metros de longitud, y la plataforma móvil será un triángulo equilátero de 0.5 metros de lado.
5 INSENSI, programa realizado en Matlab para la determinación y comprobación de las configuraciones de insensitividad (CIP) por el método iterativo de Newton-Raphson.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
73
Con los datos y condiciones anteriores, y tomando como origen de coordenadas el baricentro del triángulo equilátero formado por los ejes actuadores, con los ejes "X" e "Y" contenidos en plano de los actuadores, el eje "Y" paralelo a los ejes de actuadores "1" y "2" y con el eje "Z" hacia la plataforma móvil, se tendrá las coordenadas de los puntos siguientes:
01 = (-0.288675134, -0.05, 0) 02 = (-0.288675134, 0.05, 0) 03 = (0.101036297, 0.275, 0) 04 = (0.187638837, 0.225, 0) 05 = (0.187638837, -0.225, 0) 06 = (0.101036297, -0.275, 0)
Fig. IV-13 Manipulador Paralelo 6-RKS

Configuraciones de Insensitividad.
74
IV.4.1 - Cálculo de la primera configuración de insensitividad
Siguiendo el proceso expuesto en el apartado IV.3.2 para la obtención de las configuraciones de insensitividad, teniendo en cuenta la geometría del manipulador de este ejemplo, se tendrá las 27 ecuaciones de restricción siguientes:
( ) ( ) ( ) 0RZZYYXX 2
12
01112
01112
0111 =−−+−+− (IV-32) ( ) ( ) ( ) 0RZZYYXX 2
22
02122
02122
0212 =−−+−+− (IV-33) ( ) ( ) ( ) 0RZZYYXX 2
32
03132
03132
0313 =−−+−+− (IV-34) ( ) ( ) ( ) 0RZZYYXX 2
42
04142
04142
0414 =−−+−+− (IV-35) ( ) ( ) ( ) 0RZZYYXX 2
52
05152
05152
0515 =−−+−+− (IV-36) ( ) ( ) ( ) 0RZZYYXX 2
62
06162
06162
0616 =−−+−+− (IV-37) ( ) ( ) ( ) 0LZZYYXX 2
12
111612
111612
11161 =−−+−+− (IV-38) ( ) ( ) ( ) 0LZZYYXX 2
22
121232
121232
12123 =−−+−+− (IV-39) ( ) ( ) ( ) 0LZZYYXX 2
32
131232
131232
13123 =−−+−+− (IV-40) ( ) ( ) ( ) 0LZZYYXX 2
42
141452
141452
14145 =−−+−+− (IV-41) ( ) ( ) ( ) 0LZZYYXX 2
52
151452
151452
15145 =−−+−+− (IV-42) ( ) ( ) ( ) 0LZZYYXX 2
62
161612
161612
16161 =−−+−+− (IV-43) ( ) ( ) ( ) 0AZZYYXX 2
122
1231612
1231612
123161 =−−+−+− (IV-44) ( ) ( ) ( ) 0AZZYYXX 2
342
1231452
1231452
123145 =−−+−+− (IV-45) ( ) ( ) ( ) 0AZZYYXX 2
562
1451612
1451612
145161 =−−+−+− (IV-46) 0YY 0111 =− (IV-47) 0YY 0212 =− (IV-48)
( ) ( ) 0YYXX3 03130313 =−−−⋅ (IV-49) ( ) ( ) 0YYXX3 04140414 =−−−⋅ (IV-50) ( ) ( ) 0YYXX3 05150515 =−−−⋅ (IV-51) ( ) ( ) 0YYXX3 06160616 =−−−⋅ (IV-52)
( ) ( ) ( ) ( ) 0ZZXXXXZZ 111610111111610111 =−⋅−−−⋅− (IV-53) ( ) ( ) ( ) ( ) 0ZZXXXXZZ 121230212121230212 =−⋅−−−⋅− (IV-54)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
131230313131230313
131230313131230313
=−−+−−
+−−−−−− (IV-55)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
75
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
141450414141450414
141450414141450414
=−−+−−
+−−−−−− (IV-56)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
151450515151450515
151450515151450515
=−−+−−
+−−−−−− (IV-57)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
161610616161610616
161610616161610616
=−−+−−
+−−−−−− (IV-58)
IV.4.1.1 - Resolución del sistema
Tomando una posición aproximada para iniciar la primera iteración, por ejemplo, suponiendo que las seis manivelas están verticales hacia arriba y la plataforma móvil centrada con su centro de gravedad sobre el eje "Z" y con sus vértices en unas coordenadas "Z" de 0.7 metros, igual a la suma de longitudes de una biela y una manivela, resolviendo el sistema de 27 ecuaciones, (IV-32) a (IV-58), por medio del programa "INSENSI", se obtendrá una CIP en la que los puntos de unión manivela-biela de los seis conjuntos se encontrarán por encima de la plataforma fija. En este caso, debido a la simetría del mecanismo, la plataforma móvil se encontrará horizontal. IV.4.1.2 - Solución
Una vez resuelto el sistema, las coordenadas de los puntos de unión de las manivelas con las bielas serán los siguientes:
11 = (-0.266992585, -0.05, 0.097621038) 12 = (-0.266992585, 0.05, 0.097621038) 13 = (0.090195022, 0.256222361, 0.097621038) 14 = (0.176797562, 0.206222361, 0.097621038) 15 = (0.176797562, -0.206222361, 0.097621038) 16 = (0.090195022, -0.256222361, 0.097621038)
Y las coordenadas de los vértices de la plataforma móvil:
123 = (-0.144337567, 0.25, 0.649849022) 145 = (0.288675134, 0, 0.649849022) 161 = (-0.144337567, -0.25, 0.649849022)

Configuraciones de Insensitividad.
76
IV.4.2 - Cálculo de las 64 configuraciones de insensitividad de posición
Una vez determinada la primera CIP, en la que los ángulos de la manivelas son los correspondientes a la primera fila de la tabla (IV-1), girando las manivelas de una PI a otra, siguiendo un orden conveniente establecido en el programa INSENSI, se conseguirán las otras 63 CIP.
Ángulo de la manivela
"1" θ1
Ángulo de la manivela
"2" θ2
Ángulo de la manivela
"3" θ3
Ángulo de la manivela
"4" θ4
Ángulo de la manivela
"5" θ5
Ángulo de la manivela
"6" θ6
1 1.3522 1.3522 1.3522 1.3522 1.3522 1.3522 2 4.825 1.4474 1.4474 1.2347 1.2347 0.9229 3 4.9521 4.9521 1.0298 1.1394 1.1394 1.0298 4 1.4474 4.825 0.9229 1.2347 1.2347 1.4474 5 1.3522 4.3514 4.3514 1.3522 1.3522 1.3522 6 4.8537 4.4862 4.4862 1.2178 1.2178 0.9461 7 4.6973 0.9924 4.9091 1.2852 1.2852 0.8248 8 1.2347 0.9229 4.825 1.4474 1.4474 1.2347 9 1.1394 1.0298 4.9521 4.9521 1.0298 1.1394
10 4.6182 1.1538 5.0854 4.8032 0.9055 0.7682 11 4.7222 4.67 4.67 4.7222 0.8432 0.8432 12 1.2178 4.4862 4.4862 4.8537 0.9461 1.2178 13 1.2852 4.9091 0.9924 4.6973 0.8248 1.2852 14 4.8032 5.0854 1.1538 4.6182 0.7682 0.9055 15 4.7222 1.5806 1.5806 4.7222 0.8432 0.8432 16 1.2347 1.4474 1.4474 4.825 0.9229 1.2347 17 1.3522 1.3522 1.3522 4.3514 4.3514 1.3522 18 4.8424 1.4201 1.4201 4.2454 4.2454 0.9369 19 4.9521 4.9521 1.0298 4.1356 4.1356 1.0298 20 1.4201 4.8424 0.9369 4.2454 4.2454 1.4201 21 1.3137 4.3973 4.3973 4.3973 4.3973 1.3137 22 4.8347 4.5166 4.5166 4.2513 4.2513 0.9307 23 4.6911 1.0104 4.93 4.3322 4.3322 0.8203 24 1.2178 0.9461 4.8537 4.4862 4.4862 1.2178 25 1.2852 0.8248 4.6973 0.9924 4.9091 1.2852 26 4.7111 0.835 4.7111 0.835 4.7111 0.835 27 4.93 4.3322 4.3322 0.8203 4.6911 1.0104 28 1.4201 4.2454 4.2454 0.9369 4.8424 1.4201 29 1.5806 4.7222 0.8432 0.8432 4.7222 1.5806

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
77
30 5.0854 4.8032 0.9055 0.7682 4.6182 1.1538 31 4.9091 1.2852 1.2852 0.8248 4.6973 0.9924 32 1.4474 1.2347 1.2347 0.9229 4.825 1.4474 33 1.0298 1.1394 1.1394 1.0298 4.9521 4.9521 34 4.4862 1.2178 1.2178 0.9461 4.8537 4.4862 35 4.67 4.7222 0.8432 0.8432 4.7222 4.67 36 1.1538 4.6182 0.7682 0.9055 4.8032 5.0854 37 1.0298 4.1356 4.1356 1.0298 4.9521 4.9521 38 4.5166 4.2513 4.2513 0.9307 4.8347 4.5166 39 4.3322 0.8203 4.6911 1.0104 4.93 4.3322 40 0.9055 0.7682 4.6182 1.1538 5.0854 4.8032 41 0.8432 0.8432 4.7222 4.67 4.67 4.7222 42 4.2513 0.9307 4.8347 4.5166 4.5166 4.2513 43 4.3973 4.3973 4.3973 4.3973 4.3973 4.3973 44 0.9307 4.2513 4.2513 4.5166 4.5166 4.8347 45 1.0104 4.6911 0.8203 4.3322 4.3322 4.93 46 4.5166 4.8347 0.9307 4.2513 4.2513 4.5166 47 4.3973 1.3137 1.3137 4.3973 4.3973 4.3973 48 0.9461 1.2178 1.2178 4.4862 4.4862 4.8537 49 0.8248 1.2852 1.2852 4.9091 0.9924 4.6973 50 4.2454 1.4201 1.4201 4.8424 0.9369 4.2454 51 4.3322 4.93 1.0104 4.6911 0.8203 4.3322 52 0.835 4.7111 0.835 4.7111 0.835 4.7111 53 0.8203 4.3322 4.3322 4.93 1.0104 4.6911 54 4.2513 4.5166 4.5166 4.8347 0.9307 4.2513 55 4.1356 1.0298 4.9521 4.9521 1.0298 4.1356 56 0.7682 0.9055 4.8032 5.0854 1.1538 4.6182 57 0.8432 0.8432 4.7222 1.5806 1.5806 4.7222 58 4.2454 0.9369 4.8424 1.4201 1.4201 4.2454 59 4.3973 4.3973 4.3973 1.3137 1.3137 4.3973 60 0.9369 4.2454 4.2454 1.4201 1.4201 4.8424 61 0.9924 4.6973 0.8248 1.2852 1.2852 4.9091 62 4.4862 4.8537 0.9461 1.2178 1.2178 4.4862 63 4.3514 1.3522 1.3522 1.3522 1.3522 4.3514 64 0.9229 1.2347 1.2347 1.4474 1.4474 4.825
Tabla IV-1 Ángulos de las manivelas en las 64 CIP

Configuraciones de Insensitividad.
78
Las coordenadas de los vértices de la plataforma móvil en las 64 CIP serán los siguientes:
X123 Y123 Z123 X145 Y145 Z145 X161 Y161 Z161
1 -0.1443 0.25 0.6498 0.2887 0 0.6498 -0.1443 -0.25 0.6498 2 -0.2139 0.3706 0.6026 0.117 0 0.6587 -0.3447 -0.0999 0.4948 3 -0.3993 0.25 0.4524 -0.006 0 0.6335 -0.3993 -0.25 0.4524 4 -0.3447 0.0999 0.4948 0.117 0 0.6587 -0.2139 -0.3706 0.6026 5 -0.1194 0.2069 0.4482 0.2887 0 0.6498 -0.1443 -0.25 0.6498 6 -0.1925 0.3335 0.4179 0.094 0 0.6561 -0.3583 -0.1328 0.4893 7 0.0195 0.4307 0.4721 0.1891 0 0.6612 -0.2812 0.0318 0.4943 8 0.0858 0.3484 0.4948 0.4279 0 0.6026 -0.0585 -0.1013 0.6587 9 -0.0169 0.4708 0.4524 0.4161 0.2208 0.4524 0.003 0.0052 0.6335
10 -0.1278 0.5712 0.3631 0.2324 0.2515 0.4974 -0.2434 0.0988 0.4791 11 -0.275 0.4763 0.3219 0.1395 0.2584 0.4971 -0.2935 0.0084 0.4971 12 -0.1925 0.3335 0.4179 0.2942 0.2439 0.4893 -0.047 -0.0814 0.6561 13 -0.3827 0.1984 0.4721 0.113 0.2594 0.4943 -0.0945 -0.1637 0.6612 14 -0.4308 0.3963 0.3631 0.0361 0.2602 0.4791 -0.334 -0.0755 0.4974 15 -0.2935 0.5083 0.4872 0.1395 0.2584 0.4971 -0.2935 0.0084 0.4971 16 -0.2139 0.3706 0.6026 0.2588 0.2485 0.4948 -0.0585 -0.1013 0.6587 17 -0.1443 0.25 0.6498 0.2389 0 0.4482 -0.1443 -0.25 0.6498 18 -0.1945 0.3369 0.6198 0.1301 0 0.4435 -0.353 -0.1197 0.4918 19 -0.3993 0.25 0.4524 0.0325 0 0.4188 -0.3993 -0.25 0.4524 20 -0.353 0.1197 0.4918 0.1301 0 0.4435 -0.1945 -0.3369 0.6198 21 -0.1443 0.25 0.4428 0.2887 0 0.4428 -0.1155 -0.2001 0.6585 22 -0.2083 0.3607 0.4054 0.1358 0 0.4444 -0.3493 -0.1109 0.4932 23 0.0019 0.4505 0.4632 0.2184 0 0.4491 -0.2782 0.0374 0.4935 24 0.0641 0.3767 0.4893 0.385 0 0.4179 -0.047 -0.0814 0.6561 25 0.1682 0.2276 0.4943 0.3632 -0.2322 0.4721 -0.0945 -0.1637 0.6612 26 0.1604 0.24 0.496 0.1276 -0.2589 0.496 -0.2881 0.0189 0.496 27 -0.1092 0.1892 0.4491 0.1067 -0.2596 0.4935 -0.3911 -0.2236 0.4632 28 -0.0651 0.1127 0.4435 0.2801 -0.2458 0.4918 -0.1945 -0.3369 0.6198 29 -0.2935 -0.0084 0.4971 0.1395 -0.2584 0.4971 -0.2935 -0.5083 0.4872 30 -0.334 0.0755 0.4974 0.0361 -0.2602 0.4791 -0.4308 -0.3963 0.3631 31 -0.0945 0.1637 0.6612 0.113 -0.2594 0.4943 -0.3827 -0.1984 0.4721 32 -0.0585 0.1013 0.6587 0.2588 -0.2485 0.4948 -0.2139 -0.3706 0.6026 33 0.003 -0.0052 0.6335 0.4161 -0.2208 0.4524 -0.0169 -0.4708 0.4524 34 -0.047 0.0814 0.6561 0.2942 -0.2439 0.4893 -0.1925 -0.3335 0.4179 35 -0.2935 -0.0084 0.4971 0.1395 -0.2584 0.4971 -0.275 -0.4763 0.3219 36 -0.2434 -0.0988 0.4791 0.2324 -0.2515 0.4974 -0.1278 -0.5712 0.3631 37 -0.0162 0.0281 0.4188 0.4161 -0.2208 0.4524 -0.0169 -0.4708 0.4524 38 -0.0679 0.1176 0.4444 0.2707 -0.2471 0.4932 -0.2083 -0.3607 0.4054 39 0.1715 0.2222 0.4935 0.3892 -0.2269 0.4632 -0.1092 -0.1892 0.4491 40 0.2073 0.1614 0.4791 0.5586 -0.1749 0.3631 0.1016 -0.327 0.4974 41 0.154 0.25 0.4971 0.55 0 0.3219 0.154 -0.25 0.4971

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
79
42 0.0786 0.3579 0.4932 0.4165 0 0.4054 -0.0679 -0.1176 0.4444 43 -0.1443 0.25 0.4428 0.2887 0 0.4428 -0.1443 -0.25 0.4428 44 -0.0679 0.1176 0.4444 0.4165 0 0.4054 0.0786 -0.3579 0.4932 45 -0.2782 -0.0374 0.4935 0.2184 0 0.4491 0.0019 -0.4505 0.4632 46 -0.3493 0.1109 0.4932 0.1358 0 0.4444 -0.2083 -0.3607 0.4054 47 -0.1155 0.2001 0.6585 0.2887 0 0.4428 -0.1443 -0.25 0.4428 48 -0.047 0.0814 0.6561 0.385 0 0.4179 0.0641 -0.3767 0.4893 49 -0.0945 0.1637 0.6612 0.3632 0.2322 0.4721 0.1682 -0.2276 0.4943 50 -0.1945 0.3369 0.6198 0.2801 0.2458 0.4918 -0.0651 -0.1127 0.4435 51 -0.3911 0.2236 0.4632 0.1067 0.2596 0.4935 -0.1092 -0.1892 0.4491 52 -0.2881 -0.0189 0.496 0.1276 0.2589 0.496 0.1604 -0.24 0.496 53 -0.1092 0.1892 0.4491 0.3892 0.2269 0.4632 0.1715 -0.2222 0.4935 54 -0.2083 0.3607 0.4054 0.2707 0.2471 0.4932 -0.0679 -0.1176 0.4444 55 -0.0169 0.4708 0.4524 0.4161 0.2208 0.4524 -0.0162 -0.0281 0.4188 56 0.1016 0.327 0.4974 0.5586 0.1749 0.3631 0.2073 -0.1614 0.4791 57 0.154 0.25 0.4971 0.5869 0 0.4872 0.154 -0.25 0.4971 58 0.0728 0.3655 0.4918 0.3891 0 0.6198 -0.0651 -0.1127 0.4435 59 -0.1443 0.25 0.4428 0.2311 0 0.6585 -0.1443 -0.25 0.4428 60 -0.0651 0.1127 0.4435 0.3891 0 0.6198 0.0728 -0.3655 0.4918 61 -0.2812 -0.0318 0.4943 0.1891 0 0.6612 0.0195 -0.4307 0.4721 62 -0.3583 0.1328 0.4893 0.094 0 0.6561 -0.1925 -0.3335 0.4179 63 -0.1443 0.25 0.6498 0.2887 0 0.6498 -0.1194 -0.2069 0.4482 64 -0.0585 0.1013 0.6587 0.4279 0 0.6026 0.0858 -0.3484 0.4948
Tabla IV-2 Coordenadas de los vértices de la Plataforma móvil en las 64 CIP
En la tabla IV-3, en las páginas siguientes, se representan las 64 configuraciones de insensitividad de posición que puede adoptar el Manipulador Paralelo 6-RKS del ejemplo que se está considerando en este apartado.
La numeración sobre la plataforma móvil indica la posición de los
extremos de las manivelas. Por ejemplo, "1-0-1-0-1-0" representa que los extremos de las manivelas "1", "3" y "5" se encuentran sobre la plataforma fija y los de las manivelas "2", "4" y "6" se encuentran por debajo de dicha plataforma.

Configuraciones de Insensitividad.
80

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
81

Configuraciones de Insensitividad.
82

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
83

Configuraciones de Insensitividad.
84

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
85

Configuraciones de Insensitividad.
86

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
87
Tabla IV-3 64 configuraciones de insensitividad de posición

Configuraciones de Insensitividad.
88
IV.4.3 - Cálculo de velocidades
Como comprobación de que las configuraciones logradas, son configuraciones de insensitividad de posición, se calcularán las velocidades de los vértices de la plataforma móvil para unas velocidades cualesquiera de las manivelas y se verificará si son nulas, condición que se debe cumplir en las CIP.
Las velocidades de los puntos de unión de las manivelas con las
bielas, para unas determinadas velocidades angulares de los manivelas "ω1", "ω2", "ω3", "ω4", "ω5" y "ω6", serán:
Vx11 = - ω1 R1 sin θ1 (IV-59) Vx12 = - ω2 R2 sin θ2 (IV-60) Vx13 = 0.5 ω3 R3 sin θ3 (IV-61) Vx14 = 0.5 ω4 R4 sin θ4 (IV-62) Vx15 = 0.5 ω5 R5 sin θ5 (IV-63) Vx16 = 0.5 ω6 R6 sin θ6 (IV-64) Vy11 = 0 (IV-65) Vy12 = 0 (IV-66) Vy13 = 3 /2 ω3 R3 sin θ3 (IV-67) Vy14 = 3 /2 ω4 R4 sin θ4 (IV-68) Vy15 = - 3 /2 ω5 R5 sin θ5 (IV-69) Vy16 = - 3 /2 ω6 R6 sin θ6 (IV-70) Vz11 = ω1 R1 cos θ1 (IV-71) Vz12 = ω2 R2 cos θ2 (IV-72) Vz13 = ω3 R3 cos θ3 (IV-73) Vz14 = ω4 R4 cos θ4 (IV-74) Vz15 = ω5 R5 cos θ5 (IV-75) Vz16 = ω6 R6 cos θ6 (IV-76)
Una vez calculadas las velocidades de los puntos 11 a 16 con las
ecuaciones (IV-59) a (IV-76), por medio del sistema (IV-30), se calcularán las velocidades de los vértices de la plataforma móvil.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
89
IV.4.3.1 - Comprobación de las CIP
Resolviendo el sistema de ecuaciones (IV-30), por medio del programa "INSENSI", para la CIP correspondiente a los valores de las primeras filas de tablas (IV-1) y (IV-2), introduciendo unas velocidades angulares de 1 rad/s. a todas las manivelas, resultan las velocidades de los vértices de la plataforma móvil siguientes:
Vx123 = -6.192186911252181e-017 Vy123 = 2.313274611394614e-017 Vz123 = -2.603771706316032e-017 Vx145 = -1.214154295405641e-017 Vy145 = 1.093548002088909e-016 Vz145 = 5.601110253714043e-018 Vx161 = 3.763878316494410e-017 Vy161 = 2.313274611394616e-017 Vz161 = -3.767776844629405e-017
Como se puede observar, las velocidades de los vértices de la plataforma móvil son despreciables cuando el manipulador se encuentra en una CIP, que es lo que se pretendía demostrar.
Para otra CIP del manipulador, por ejemplo para la configuración "0-1-0-1-0-1" correspondiente a la fila 26 de las tablas (IV-1) y (IV-2), que tendrá las manivelas 1", "3" y "5" por debajo, y las manivelas "2", "4" y "6" sobre la plataforma fija, se tendrá que las coordenadas de los puntos de unión del eje del actuador con la manivela (puntos de 01 a 06), al ser fijos, serán los mismos que en el ejemplo anterior:
01 = (-0.288675134, -0.05, 0) 02 = (-0.288675134, 0.05, 0) 03 = (0.101036297, 0.275, 0) 04 = (0.187638837, 0.225, 0) 05 = (0.187638837, -0.225, 0) 06 = (0.101036297, -0.275, 0)
Partiendo de la primera CIP lograda "1-1-1-1-1-1", girando las manivelas "1", "3" y "5" por medio del programa "INSENSI", se obtendrá la CIP que se pretende estudiar "0-1-0-1-0-1", cuyas coordenadas de los puntos de unión manivela-biela serán los siguientes:

Configuraciones de Insensitividad.
90
11 = (-0.288675134, -0.05, -0.099999921) 12 = (-0.221559188, 0.05, 0.074131301) 13 = (0.101098857, 0.275108358, -0.099999921) 14 = (0.154080864, 0.166875885, 0.074131301) 15 = (0.187701397, -0.225108358, -0.099999921) 16 = (0.067478324, -0.216875885, 0.074131301)
Y las coordenadas de los vértices de la plataforma móvil:
123 = ( 0.160411877, 0.240002840, 0.496028238) 145 = ( 0.127642618, -0.258922180, 0.496028239) 161 = (-0.288054494, 0.018919340, 0.496028238)
Calculando las velocidades de los vértices de la plataforma móvil para
unas velocidades angulares de las manivelas de 1 rad/s, resultan en este caso, los valores siguientes:
Vx123 = -5.422162348772668e-015 Vy123 = 5.157982651548186e-015 Vz123 = 2.569677055887484e-015 Vx145 = 1.035113226518595e-015 Vy145 = 4.733870557753380e-015 Vz145 = 4.817838154888438e-015 Vx161 = -2.560816408164872e-015 Vy161 = -6.462380843204576e-016 Vz161 = -1.772153366471474e-015
Se puede observar, que al igual que en el caso anterior, las velocidades
de los vértices de la plataforma móvil son despreciables, lo que demuestra que el manipulador se encuentra en otra CIP.
IV.5 - CONCLUSIONES Como una generalización de la utilidad de las configuraciones de
insensitividad de posición de los mecanismos planos de pistón-biela-manivela y manivela-oscilador, se expone la utilidad de las configuraciones de insensitividad de posición "CIP" del manipulador paralelo 6-RKS propuesto por Hunt.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
91
Se determina el número de CIP de todos los tipos posibles, constatando que existen 12 CIP-1, 60 CIP-2, 120 CIP-3, 240 CIP-4, 192 CIP-5 y 64 CIP-6 ó total.
Las 64 CIP-6 son las que se han llamado y se llamarán CIP y
corresponden con configuraciones puntuales de gran precisión de posición para la plataforma móvil. En estas configuraciones, pequeños errores en la posición de los actuadores no afectan a la posición de la plataforma.
Al pasar de una CIP a otra, la velocidad cuando se acerque a la nueva
posición disminuirá progresivamente, por lo que las fuerzas de inercia, si el manipulador se detiene en esa posición, serán muy reducidas, permitiendo la utilización de motores eléctricos asíncronos, más económicos que los motores que permiten un control de su velocidad, y que sería necesario utilizar si se produjesen detenciones del manipulador fuera de sus CIP.
En estas configuraciones, los pares a aplicar a los actuadores para
equilibrar a las fuerzas y pares aplicados sobre la plataforma móvil serán nulos. Ello es debido a que las fuerzas que aparecen en los extremos de las manivelas cortan a los ejes de los actuadores.
Se ha expuesto un método numérico para la obtención de una de estas
configuraciones y a partir de ella, las 63 restantes. Observando el sistema de ecuaciones que relaciona las velocidades de
los extremos de las manivelas y de los vértices de la plataforma móvil, se comprueba que si en cada cadena cinemática se cumple que el eje del actuador, la manivela y la biela están en el mismo plano, el manipulador se encuentra en una CIP.
Finalmente, en el ejemplo numérico del apartado IV.4, se determinan
las 64 CIP para un manipulador de unas dimensiones determinadas, comprobándose numéricamente que las CIP obtenidas son realmente configuraciones de insensitividad de posición.

Configuraciones de Insensitividad.
92

CAPÍTULO V
SÍNTESIS DE UN MANIPULADOR 6-RKS

Síntesis de un Manipulador 6-RKS
94

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
95
CAPÍTULO V - SÍNTESIS DE UN
MANIPULADOR 6-RKS
V.1 � INTRODUCCIÓN En este capítulo se sintetizará un manipulador para lograr que varias
posiciones prefijadas de la plataforma móvil se consigan estando el manipulador en configuración de insensitividad de posición.
Así como los mecanismos planos de pistón-biela-manivela y de
manivela-oscilador es interesante diseñarlos de forma que las posiciones de detención deseadas coincidan con configuraciones de insensitividad, también en los mecanismos espaciales tipo manipulador paralelo 6-RKS resulta ventajoso conseguir que varias posiciones de detención prefijadas de la plataforma móvil se alcancen estando el manipulador en configuración de insensitividad de posición. De esta forma se consigue que estas configuraciones sean de gran precisión de posición, que los pares sobre los actuadores sean nulos y que las velocidades de los puntos de la plataforma móvil sean nulas, con lo que las aceleraciones, y por lo tanto las fuerzas de inercia, serán menores que si se detiene al mecanismo en cualquier otra configuración.
En el Capítulo IV se ha visto que son 64 las CIP totales y que éstas
son puntuales; es decir, que para una determinada posición de los actuadores sobre la plataforma fija, unas longitudes de las manivelas, de las bielas y de los lados del triángulo de la plataforma móvil, el manipulador tendrá 64 configuraciones de insensitividad de posición sobre la plataforma fija perfectamente determinadas.
Para ciertas aplicaciones, como posicionar piezas o utillajes en
máquina-herramienta, se puede utilizar el manipulador paralelo 6-RKS aprovechando sus CIP por las ventajas que se han descrito anteriormente. Por ello, sería importante conseguir que las posiciones que deba tener la pieza o utillaje se alcancen estando el manipulador en CIP.
En este capítulo, se trata de dimensionar el manipulador de forma que
varias posiciones predeterminadas de la plataforma móvil necesarias para realizar una determinada labor, coincidan con CIP.
El problema, así planteado, se corresponde con la "Síntesis
Dimensional". Después de haber llevado a cabo la "Síntesis de Tipo y de

Síntesis de un Manipulador 6-RKS
96
Número" al seleccionar el de tipo de mecanismo por el hecho de que posee una plataforma móvil con 6 grados de libertad y configuraciones de insensitividad de posición. Ahora, se trata de calcular las dimensiones de los diferentes eslabones con el fin de conseguir que varias posiciones deseadas de la plataforma móvil se puedan alcanzar estando el manipulado en CIP. Este estudio se puede corresponder con la "síntesis de puntos de precisión" de mecanismos planos puesta como ejemplo en el Anexo I.
V.2 � POSICIONES PREDETERMINADAS EN CIP En principio, se podrían predeterminar 64 posiciones de la plataforma
móvil, que son las correspondientes a las 64 configuraciones de insensitividad de posición que alcanza el manipulador 6-RKS. Sin embargo, esto es muy difícil ya que para cada posición se deben cumplir 24 condiciones de restricción por lo tanto se tendrían 64 por 24 igual a 1536 ecuaciones. Por otro lado, se tendría 18 coordenadas de los seis extremos de las manivelas, que para las 64 posiciones representarían 1152 incógnitas, por lo que se necesitarían añadir 364 incógnitas para que resultase un sistema de ecuaciones determinado. Teniendo en cuenta que el manipulador tiene 6 cadenas cinemáticas de unión de la plataforma fija con la plataforma móvil, corresponden 64 incógnitas por cada cadena. Es decir, que en cada cadena formada por el actuador, la manivela y la biela se deben introducir 64 variables.
Las 24 condiciones de restricción del párrafo anterior corresponden: 6
a las longitudes constantes de las manivelas, 6 a las longitudes constantes de las bielas, 6 a la condición de que los extremos de las manivelas describan unas circunferencias perpendiculares a los ejes de los actuadores y finalmente otras 6 condiciones asociadas a que el eje de un actuador, la manivela y la biela correspondientes estén en el mismo plano para que se dé una CIP. Las otras tres condiciones de restricción expuestas en el Capítulo IV referentes a las longitudes constantes de los lados del triángulo de la plataforma móvil no son necesarias ya que la posición deseada de la plataforma móvil se da por medio de las coordenadas de los vértices del triángulo y, por lo tanto, estas condiciones de restricción ya se cumplen.
En lugar de intentar resolver el problema más complejo, se inicia el
estudio para dos configuraciones de insensitividad de posición y posteriormente se irán considerando más configuraciones. En la realidad de la industria, con unas pocas posiciones ya suele ser suficiente, ya que la mayoría de las piezas, al colocarlas en una máquina, suele ser necesario colocarlas, como mucho, en tres o cuatro posiciones determinadas.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
97
Con el fin de que las ecuaciones de restricción, introducidas en el Capítulo IV, resulten más sencillas, y sin perder generalidad, en este capítulo se supone que los ejes de los actuadores forman un triángulo equilátero (Fig. V-1).
Fig. V-1 Actuadores sobre la plataforma fija Se toma como origen de coordenadas el baricentro del triángulo
formado por los ejes de los actuadores, con los ejes "X" e "Y" contenidos en el plano de los ejes de los actuadores y el eje "Y" paralelo a los ejes de los actuadores "1" y "2" y con el eje "Z" hacia la plataforma móvil.

Síntesis de un Manipulador 6-RKS
98
V.2.1 � Una posición predeterminada en CIP Para una posición predeterminada de la plataforma móvil como CIP
(Fig. V-2), se tendrán 24 ecuaciones de restricción para el manipulador: - 6 para las longitudes constantes de las manivelas. - 6 para las longitudes constantes de las bielas. - 6 para indicar que el extremo de la manivela se mueve en un plano
perpendicular al eje del actuador. - 6 para determinar que los elementos de cada cadena actuador, manivela y
biela se encuentran en un plano y por lo tanto el manipulador en una CIP.
Fig. V-2 Manipulador 6-RKS en una CIP
Las condiciones de restricción para las longitudes constantes de las
manivelas serán las siguientes:
( ) ( ) ( ) 0RZZYYXX 21
20111
20111
20111 =−−+−+− (V-1)
( ) ( ) ( ) 0RZZYYXX 22
20212
20212
20212 =−−+−+− (V-2)
( ) ( ) ( ) 0RZZYYXX 23
20313
20313
20313 =−−+−+− (V-3)
( ) ( ) ( ) 0RZZYYXX 24
20414
20414
20414 =−−+−+− (V-4)
( ) ( ) ( ) 0RZZYYXX 25
20515
20515
20515 =−−+−+− (V-5)
( ) ( ) ( ) 0RZZYYXX 26
20616
20616
20616 =−−+−+− (V-6)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
99
Las condiciones de restricción para las longitudes constantes de las bielas serán las siguientes:
( ) ( ) ( ) 0LZZYYXX 2
12
111612
111612
11161 =−−+−+− (V-7) ( ) ( ) ( ) 0LZZYYXX 2
22
121232
121232
12123 =−−+−+− (V-8) ( ) ( ) ( ) 0LZZYYXX 2
32
131232
131232
13123 =−−+−+− (V-9) ( ) ( ) ( ) 0LZZYYXX 2
42
141452
141452
14145 =−−+−+− (V-10) ( ) ( ) ( ) 0LZZYYXX 2
52
151452
151452
15145 =−−+−+− (V-11) ( ) ( ) ( ) 0LZZYYXX 2
62
161612
161612
16161 =−−+−+− (V-12) Para indicar la perpendicularidad entre la manivela y el eje del
actuador correspondiente:
0YY 0111 =− (V-13) 0YY 0212 =− (V-14)
( ) ( ) 0YYXX3 03130313 =−−−⋅ (V-15) ( ) ( ) 0YYXX3 04140414 =−−−⋅ (V-16) ( ) ( ) 0YYXX3 05150515 =−−−⋅ (V-17) ( ) ( ) 0YYXX3 06160616 =−−−⋅ (V-18)
Y finalmente para conseguir que el eje del actuador, la manivela y la
biela se encuentren en un plano:
( ) ( ) ( ) ( ) 0ZZXXXXZZ 111610111111610111 =−⋅−−−⋅− (V-19) ( ) ( ) ( ) ( ) 0ZZXXXXZZ 121230212121230212 =−⋅−−−⋅− (V-20)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
131230313131230313
131230313131230313
=−−+−−
+−−−−−− (V-21)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
141450414141450414
141450414141450414
=−−+−−
+−−−−−− (V-22)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
151450515151450515
151450515151450515
=−−+−−
+−−−−−− (V-23)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
161610616161610616
161610616161610616
=−−+−−
+−−−−−− (V-24)

Síntesis de un Manipulador 6-RKS
100
V.2.2 � Dos posiciones predeterminadas en CIP Si se desean dos posiciones predeterminadas como CIP (Fig. V-3) se
tendrá un total de 48 ecuaciones de restricción, 24 para cada posición.
Fig. V-3 Manipulador 6-RKS en dos CIP
Para que este sistema de 48 ecuaciones tenga solución, en el caso más
general, deben existir 48 incógnitas. En principio, podrían ser las 18 coordenadas de posición de los puntos extremos de las manivelas, puntos de unión de las manivelas con las bielas, que al ser para dos posiciones representarían 36 incógnitas. Como se necesitan 12 incógnitas más, se pueden tomar como variables las longitudes de las manivelas y de las bielas. De este modo, se tiene un sistema con 48 ecuaciones y 48 incógnitas que, en principio, tendrá solución, siendo ésta las posiciones de los puntos extremos de las manivelas para las dos CIP y las longitudes de bielas y manivelas.
Aparte de las dos CIP predeterminadas, el manipulador tendrá otras 62
CIP más, ya que éste tiene un total de 64 sobre la plataforma fija. Las 62 CIP restantes podrán ser aprovechadas en algunos casos, si en vez de necesitarse una posición determinada, se puede ajustar la posición de trabajo a una de las CIP que proporciona el manipulador.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
101
V.2.2.1 �Formas de obtener dos posiciones en CIP Tal y como se vio en el Capítulo IV, atendiendo a las seis últimas
condiciones de restricción, las que hacen que el eje del actuador, la manivela y la biela estén contenidos en un plano para que el manipulador esté en CIP, se llega a la conclusión de que los extremos de las bielas deben estar sobre unas superficies tóricas (Fig. V-4).
Fig. V-4 Lugar geométrico del extremo de una biela en PI Como a cada extremo de la plataforma móvil van unidas dos bielas,
por ejemplo la biela "2" y la "3" que se unen al punto "123", este punto debe estar contenido en dos superficies tóricas: una la correspondiente a la cadena cinemática 2 y otra correspondiente a la cadena 3.
La intersección de dos toros, del tipo que resultan cuando la manivela
tiene menor longitud que la biela, o sea que son toros que no tienen agujero central, se produce a lo largo de 4 líneas cerradas (Fig. V-5). Por lo que el punto "123", vértice de la plataforma móvil, puede estar sobre cuatro líneas diferentes cuando las cadenas actuador, manivela y biela "2" y "3" estén en PI.

Síntesis de un Manipulador 6-RKS
102
Fig. V-5 Lugar geométrico de un vértice de la plataforma móvil en PI Que el lugar geométrico del vértice de la plataforma móvil sean 4
líneas resulta lógico, ya que cada cadena actuador, manivela y biela tiene dos PI, por lo tanto el punto "123", que es la unión de dos bielas, tendrá 22 = 4 PI.
Teniendo en cuenta que la plataforma móvil, en las dos posiciones
predeterminadas, debe tener cada uno de sus vértices en alguna de las cuatro líneas intersección de los dos toros correspondientes a cada vértice, resulta que dos posiciones predeterminadas se pueden conseguir de varias formas diferentes. El número teórico de soluciones para cada vértice de la plataforma móvil será variaciones con repetición de cuatro elementos tomados de dos en dos que es igual a 16 y, como son tres vértices, resulta 163; es decir, 4096 posibles soluciones, al menos en teoría.
De estas 4096 posibles soluciones, existen 64 en las que las dos
posiciones prefijadas para la plataforma móvil son la misma. Esto es debido a que dos posiciones diferentes de la plataforma móvil pueden tener un vértice de la plataforma móvil sobre la misma línea de intersección de los dos toros correspondientes, incluso puede ocurrir esto para dos vértices, pero si cada uno de los tres vértices de la plataforma, en las dos posiciones de ésta, se encontrase sobre la misma línea, resultaría que esas dos posiciones serían la misma. Estas posibles soluciones han sido contabilizadas al calcular variaciones con

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
103
repetición y, como no es lógico que se prefijen dos posiciones iguales para la plataforma móvil, resulta que el número de posibles soluciones teóricas, para conseguir que dos posiciones de la plataforma móvil sean CIP, es 4032.
Para conseguir las posibles soluciones mencionadas en el párrafo
anterior se utiliza el método iterativo de Newton-Raphson. El proceso es el siguiente: Se introducen como valores iniciales las coordenadas de los vértices de la plataforma móvil para las dos posiciones deseadas, las longitudes iniciales de las seis manivelas y de las seis bielas y los dos conjuntos de coordenadas iniciales de los puntos extremos de las seis manivelas para las dos posiciones de la plataforma prefijada. Se consideran las 48 ecuaciones de restricción correspondientes a las dos posiciones prefijadas. Se itera, tomando como valores iniciales para una iteración los resultados de la iteración anterior, y así sucesivamente, hasta obtener unas longitudes de manivelas y bielas y unas coordenadas de los puntos extremos de las manivelas que cumplan las ecuaciones de restricción cometiendo un error inferior a una cantidad prefijada.
Como el método de Newton-Raphson no siempre converge, y con el
fin de obtener el máximo de soluciones posibles, se repite el proceso 4.096 veces. Para ello se inician las iteraciones con las 64 x 64 combinaciones posibles de coordenadas de los puntos extremos de las manivelas obtenidas al conseguir las 64 CIP de un manipulador con las seis manivelas de la misma longitud y las seis bielas también de la misma longitud.
Es este un punto en el que podría haberse hecho uso de un método
aleatorio para tomar los valores iniciales de las coordenadas de los seis puntos extremos de las manivelas y las longitudes de las manivelas y bielas para las dos posiciones prefijadas. No obstante, como en el capítulo anterior se ha expuesto un método para determinar las 64 CIP, y en un ejemplo numérico se han determinado las CIP para un manipulador con longitudes de manivelas iguales y también con longitudes de bielas iguales, parece lógico tomar como configuraciones iniciales dos CIP ya determinadas, y como longitudes de bielas y manivelas iniciales las longitudes del manipulador al que corresponden esas CIP.
V.2.3 � Tres posiciones predeterminadas en CIP Si se desean alcanzar tres posiciones predeterminadas de la plataforma
móvil estando el manipulador en configuración de insensitividad de posición (Fig. V-6), se tendrá, igual que en el caso de dos posiciones: - 6 ecuaciones de restricción para las longitudes constantes de las manivelas. - 6 para las longitudes constantes de las bielas.

Síntesis de un Manipulador 6-RKS
104
- 6 para indicar que el extremo de la manivela se mueve en un plano perpendicular al eje del actuador.
- 6 para determinar que cada cadena actuador-manivela-biela se encuentra en un plano y por lo tanto en posición de insensitividad.
Es decir, resultan 24 ecuaciones de restricción por cada posición y,
por lo tanto, un total de 72 ecuaciones de restricción para las tres posiciones predeterminadas de la plataforma móvil deseadas.
Para que este sistema de 72 ecuaciones tenga solución, deben existir
72 incógnitas. En principio, podrían ser las 18 coordenadas de posición de los puntos extremos de las manivelas que, al ser para tres configuraciones, representarían 54 incógnitas. Como son necesarias 18 incógnitas más, se pueden tomar como variables las longitudes de las manivelas y de las bielas y por ejemplo las coordenadas "X" de los actuadores. De esta manera, se tiene un sistema con 72 ecuaciones y 72 incógnitas que, en principio, tendrá solución, siendo ésta las posiciones de los puntos extremos de las manivelas para las tres configuraciones de insensitividad, las longitudes de manivelas y bielas y las coordenadas "X" de los actuadores.
Fig. V-6 Manipulador 6-RKS en tres CIP
Aparte de las tres configuraciones de insensitividad predeterminadas,
el manipulador tendrá otras 61 configuraciones de insensitividad más, ya que puede alcanzar un total de 64. Las 61 configuraciones restantes podrán ser

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
105
aprovechadas siempre que se ajuste las necesidades del trabajo a la posición de la plataforma móvil.
V.2.3.1 � Formas de obtener tres posiciones en CIP Para tres posiciones predeterminadas, de forma similar a lo expuesto
para el caso de dos posiciones, cada vértice de la plataforma móvil se debe encontrar sobre alguna de las líneas intersección de las superficies toroidales correspondientes a las cadenas actuador, manivela y biela cuyas bielas van unidas al vértice considerado.
Teniendo en cuenta que la plataforma móvil, en las tres posiciones
predeterminadas, debe tener cada uno de sus vértices en alguna de las cuatro líneas intersección de los dos toros correspondientes a cada vértice, resulta que tres posiciones predeterminadas se pueden conseguir de varias formas diferentes. El número teórico de soluciones para cada vértice de la plataforma móvil será variaciones con repetición de cuatro elementos tomados de tres en tres, que es igual a 64, y como son tres vértices, se tienen 643 igual a 262.144 posibles soluciones.
Haciendo el mismo razonamiento que para dos posiciones, de estas
262.144 posibles soluciones existen 64.000 en las que las dos o tres posiciones prefijadas para la plataforma móvil son la misma. Como no es lógico que se prefijen dos o tres posiciones iguales para la plataforma móvil, resulta que el número de posibles soluciones teóricas para conseguir que tres posiciones de la plataforma móvil se consigan estando el manipulador en configuración de insensitividad es de 198.144.
Para conseguir las posibles soluciones mencionadas en el párrafo
anterior se utiliza el método iterativo de Newton-Raphson. El proceso es el siguiente: Se introducen como valores iniciales las coordenadas de los vértices de la plataforma móvil para las tres posiciones deseadas, las longitudes iniciales de las seis manivelas y de las seis bielas, las coordenadas "X" de los actuadores y los tres conjuntos de coordenadas de los puntos extremos de las seis manivelas para las tres posiciones de la plataforma. Se consideran las 72 ecuaciones de restricción correspondientes a las tres posiciones prefijadas. Se itera, tomando como valores iniciales para una iteración los resultados de la iteración anterior, y así sucesivamente, hasta obtener unas longitudes de manivelas y bielas, unas coordenadas "X" de los actuadores y unas coordenadas de los puntos extremos de las manivelas que cumplan las ecuaciones de restricción cometiendo un error inferior a una cantidad prefijada.

Síntesis de un Manipulador 6-RKS
106
Como el método de Newton-Raphson no siempre converge o converge a soluciones no constructivas, por ejemplo con longitudes de bielas y manivelas de miles de metros y, con el fin de obtener el máximo de soluciones posibles, se repite el proceso 262.144 veces, iniciando las iteraciones con las 64 x 64 x 64 combinaciones posibles de coordenadas de los puntos extremos de las manivelas de las 64 CIP determinadas en el ejemplo numérico del Capítulo IV. Se toman como valores iniciales para determinar las dimensiones del manipulador todas las combinaciones posibles de CIP porque, de ese modo, es más fácil que entre todas las soluciones obtenidas haya varias constructivas.
V.2.4 � Cuatro posiciones predeterminadas en CIP Haciendo el mismo razonamiento que para dos y tres posiciones
prefijadas, como se tienen 24 condiciones de restricción, se tendrá un sistema de 96 ecuaciones. Por otro lado se tienen 72 incógnitas que serán las coordenadas de los extremos de las manivelas. Serán necesarias 24 incógnitas más, que se pueden tomar, por ejemplo, las longitudes de manivelas y bielas y las coordenadas "X" e "Y" de los actuadores.
Igual que en los casos anteriores, aparte de las cuatro posiciones de
insensitividad de la plataforma móvil predeterminadas, el manipulador tendrá otras 60 configuraciones de insensitividad de posición más.
V.2.4.1 � Formas de obtener 4 posiciones en CIP Teniendo en cuenta que la plataforma móvil, en las cuatro posiciones
predeterminadas, debe tener cada uno de sus vértices en alguna de las cuatro líneas intersección de los dos toros correspondientes a cada vértice, resulta que cuatro posiciones predeterminadas se pueden conseguir de varias formas diferentes. El número teórico de soluciones para cada vértice de la plataforma móvil será variaciones con repetición de cuatro elementos tomados de cuatro en cuatro que es igual a 256; y como son tres vértices resulta 2563 igual a 16.777.216 posibles soluciones.
De estas 16.777.216 posibles soluciones, existen 1.528.192 en las que
las dos, tres o cuatro posiciones prefijadas para la plataforma móvil son la misma. Como no es lógico que se prefijen dos, tres o cuatro posiciones iguales para la plataforma móvil, resulta que el número de posibles soluciones teóricas para conseguir que cuatro posiciones de la plataforma móvil, se consigan estando el manipulador en configuraciones de insensitividad de posición, es de 12.249.024.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
107
Para obtener las posibles soluciones mencionadas en el párrafo anterior se utiliza el método iterativo de Newton-Raphson para la resolución del sistema de 96 ecuaciones: Se introducen como datos para la primera iteración las coordenadas de los vértices de la plataforma móvil para las cuatro posiciones deseadas, las longitudes iniciales de las manivelas y de las bielas, las coordenadas "X" e "Y" iniciales de los actuadores, los cuatro conjuntos de coordenadas iniciales de los puntos extremos de las seis manivelas para las cuatro posiciones de la plataforma. Se consideran las 96 ecuaciones de restricción correspondientes a las cuatro posiciones prefijadas. Se itera, tomando como valores iniciales para cada iteración los resultados de la iteración anterior, y así sucesivamente, hasta obtener como resultado las longitudes de manivelas y bielas, las coordenadas "X" e "Y" de los actuadores y las coordenadas de los puntos extremos de las manivelas que cumplan las condiciones de restricción con un error inferior a una cantidad prefijada.
Al igual que en los casos anteriores, como el método de Newton-
Raphson no siempre converge y con el fin de obtener el máximo de soluciones constructivas posibles, se repite el proceso iniciando la iteración con las 64 x 64 x 64 x 64 combinaciones posibles de coordenadas de los puntos extremos de las manivelas obtenidas al determinar las 64 CIP de un manipulador con las seis manivelas de la misma longitud y las seis bielas también de la misma longitud.
Debido a lo costoso en tiempo que resultaría este método, ya que
habría que resolver 644 = 16.777.216 veces un sistema de 96 ecuaciones, y en cada una de ellas al menos se deben realizar un mínimo de 8 iteraciones hasta conseguir la convergencia, en este caso, se puede utilizar un método aleatorio para tomar los valores iniciales en cada una de las aplicaciones del método de Newton-Raphson dentro de la serie de 16.777.216 posibles, hasta conseguir varias soluciones para las longitudes de bielas y manivelas y posiciones de los actuadores que se consideren satisfactorias.
V.3 � EJEMPLO NUMÉRICO PARA DOS CIP
En este ejemplo numérico, se aplicará el método descrito en el Apartado V.2.2 para lograr que dos posiciones prefijadas de la plataforma móvil se consigan estando el manipulador en configuración de insensitividad de posición (CIP).
Se pretende mecanizar, en una esfera de 100 milímetros de diámetro
apoyada en el centro de la plataforma móvil, dos caras de un icosaedro. Para poder mecanizar correctamente, las caras deben estar horizontales, con sus

Síntesis de un Manipulador 6-RKS
108
baricentros coincidiendo con el eje "Z" del manipulador y con la arista entre las dos caras paralela al eje "Y". La primera cara se mecanizará estando la plataforma móvil horizontal (Fig. V-7).
Fig. V-7 Superficies a mecanizar
V.3.1 � Introducción de datos
Con las condiciones propuestas en el apartado anterior, tomando como primera posición de la plataforma móvil la primera de las 64 CIP del ejemplo del apartado IV.4, y teniendo en cuenta que el ángulo entre caras de un icosaedro es de 41.81º, las coordenadas de los vértices de la plataforma móvil en la primera posición serán las siguientes: X123A = -0.1441 Y123A = 0.25 Z123A = 0.6498 X145A = 0.2887 Y145A = 0 Z145A = 0.6498 X161A = -0.1441 Y161A = -0.25 Z161A = 0.6498

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
109
Para la segunda posición, la plataforma móvil deberá realizar un giro de 41.81º alrededor de un eje paralelo al eje "Y" que pase por el centro de la esfera a mecanizar, resultando que las coordenadas de los vértices de la plataforma en esta segunda posición serán las siguientes: X123B = -0.1409 Y123B = 0.25 Z123B = 0.7587 X145B = 0.1819 Y145B = 0 Z145B = 0.4701 X161B = -0.1409 Y161B = -0.25 Z161B = 0.7587
Tomando las dimensiones de la plataforma fija y la posición de los actuadores igual que en el ejemplo del Capítulo IV, resultará que las coordenadas de los puntos 01 a 06 serán:
01 = (-0.288675134, -0.05, 0) 02 = (-0.288675134, 0.05, 0) 03 = (0.101036297, 0.275, 0) 04 = (0.187638837, 0.225, 0) 05 = (0.187638837, -0.225, 0) 06 = (0.101036297, -0.275, 0)
Para la primera iteración se tomará, como longitudes de las manivelas:
R1 = R2 = R3 = R4 = R5 = R6 = 0.1 metros. Y como longitudes de las bielas:
L1 = L2 = L3 = L4 = L5 = L6 = 0.6 metros
Las longitudes de los lados del triángulo de la plataforma móvil, de 0.5 metros, ya quedan determinados por las dos posiciones preestablecidas.
Para las coordenadas de los extremos de las manivelas, puntos del "11" al "16" en sus dos posiciones, se irán tomando las 64 x 64 = 4096 combinaciones de coordenadas de estos puntos en las 64 CIP del manipulador obtenidas en el ejemplo del Capítulo IV.

Síntesis de un Manipulador 6-RKS
110
V.3.2 � Condiciones de restricción
Como condiciones de restricción se tendrá:
Para las longitudes constantes de las manivelas en la primera posición:
( ) ( ) ( ) 0RZZYYXX 21
201A11
201A11
201A11 =−−+−+− (V-25)
( ) ( ) ( ) 0RZZYYXX 22
202A12
202A12
202A12 =−−+−+− (V-26)
( ) ( ) ( ) 0RZZYYXX 23
203A13
203A13
203A13 =−−+−+− (V-27)
( ) ( ) ( ) 0RZZYYXX 24
204A14
204A14
204A14 =−−+−+− (V-28)
( ) ( ) ( ) 0RZZYYXX 25
205A15
205A15
205A15 =−−+−+− (V-29)
( ) ( ) ( ) 0RZZYYXX 26
206A16
206A16
206A16 =−−+−+− (V-30)
Para las longitudes constantes de las manivelas en la segunda posición:
( ) ( ) ( ) 0RZZYYXX 21
201B11
201B11
201B11 =−−+−+− (V-31)
( ) ( ) ( ) 0RZZYYXX 22
202B12
202B12
202B12 =−−+−+− (V-32)
( ) ( ) ( ) 0RZZYYXX 23
203B13
203B13
203B13 =−−+−+− (V-33)
( ) ( ) ( ) 0RZZYYXX 24
204B14
204B14
204B14 =−−+−+− (V-34)
( ) ( ) ( ) 0RZZYYXX 25
205B15
205B15
205B15 =−−+−+− (V-35)
( ) ( ) ( ) 0RZZYYXX 26
206B16
206B16
206B16 =−−+−+− (V-36)
Para las longitudes constantes de las bielas en la primera posición:
( ) ( ) ( ) 0LZZYYXX 21
2A11A161
2A11A161
2A11A161 =−−+−+− (V-37)
( ) ( ) ( ) 0LZZYYXX 22
2A12A123
2A12A123
2A12A123 =−−+−+− (V-38)
( ) ( ) ( ) 0LZZYYXX 23
2A13A123
2A13A123
2A13A123 =−−+−+− (V-39)
( ) ( ) ( ) 0LZZYYXX 24
2A14B145
2A14B145
2A14B145 =−−+−+− (V-40)
( ) ( ) ( ) 0LZZYYXX 25
2A15A145
2A15A145
2A15A145 =−−+−+− (V-41)
( ) ( ) ( ) 0LZZYYXX 26
2A16A161
2A16A161
2A16A161 =−−+−+− (V-42)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
111
Para las longitudes constantes de las bielas en la segunda posición: ( ) ( ) ( ) 0LZZYYXX 2
12
B11B1612
B11B1612
B11B161 =−−+−+− (V-43) ( ) ( ) ( ) 0LZZYYXX 2
22
B12B1232
B12B1232
B12B123 =−−+−+− (V-44) ( ) ( ) ( ) 0LZZYYXX 2
32
B13B1232
B13B1232
B13B123 =−−+−+− (V-45) ( ) ( ) ( ) 0LZZYYXX 2
42
B14B1452
B14B1452
B14B145 =−−+−+− (V-46) ( ) ( ) ( ) 0LZZYYXX 2
52
B15B1452
B15B1452
B15B145 =−−+−+− (V-47) ( ) ( ) ( ) 0LZZYYXX 2
62
B16B1612
B16B1612
B16B161 =−−+−+− (V-48)
Para indicar la perpendicularidad de las circunferencias descritas por los extremos de las manivelas con los ejes de los actuadores respectivos, en la primera posición:
0YY 01A11 =− (V-49) 0YY 02A12 =− (V-50)
( ) ( ) 0YYXX3 03A1303A13 =−−−⋅ (V-51) ( ) ( ) 0YYXX3 04A1404A14 =−−−⋅ (V-52) ( ) ( ) 0YYXX3 05A1505A15 =−−−⋅ (V-53) ( ) ( ) 0YYXX3 06A1606A16 =−−−⋅ (V-54)
Para la perpendicularidad de las circunferencias descritas por los
extremos de las manivelas con los ejes de los actuadores respectivos, en la segunda posición:
0YY 01B11 =− (V-55) 0YY 02B12 =− (V-56)
( ) ( ) 0YYXX3 03B1303B13 =−−−⋅ (V-57) ( ) ( ) 0YYXX3 04B1404B14 =−−−⋅ (V-58) ( ) ( ) 0YYXX3 05B1505B15 =−−−⋅ (V-59) ( ) ( ) 0YYXX3 06B1606B16 =−−−⋅ (V-60)

Síntesis de un Manipulador 6-RKS
112
Para la condición de que los ejes de los actuadores, las manivela y las bielas en cada cadena deben estar contenidas en un plano, para la primera posición de la plataforma móvil:
( ) ( ) ( ) ( ) 0ZZXXXXZZ A11A16101A11A11A16101A11 =−⋅−−−⋅− (V-61) ( ) ( ) ( ) ( ) 0ZZXXXXZZ A12A12302A12A12A12302A12 =−⋅−−−⋅− (V-62)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
A13A12303A13A13A12303A13
A13A12303A13A13A12303A13
=−−+−−
+−−−−−− (V-63)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
A14A14504A14A14A14504A14
A14A14504A14A14A14504A14
=−−+−−
+−−−−−− (V-64)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
A15A14505A15A15A14505A15
A15A14505A15A15A14505A15
=−−+−−
+−−−−−− (V-65)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
A16A16106A16A16A16106A16
A16A16106A16A16A16106A16
=−−+−−
+−−−−−− (V-66)
Para la condición de que los ejes de los actuadores, las manivela y las bielas en cada cadena deben estar contenidas en un plano, para la segunda posición de la plataforma móvil:
( ) ( ) ( ) ( ) 0ZZXXXXZZ B11B16101B11B11B16101B11 =−⋅−−−⋅− (V-67) ( ) ( ) ( ) ( ) 0ZZXXXXZZ B12B12302B12B12B12302B12 =−⋅−−−⋅− (V-68)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
B13B12303B13B13B12303B13
B13B12303B13B13B12303B13
=−−+−−
+−−−−−− (V-69)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
B14B14504B14B14B14504B14
B14B14504B14B14B14504B14
=−−+−−
+−−−−−− (V-70)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
113
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
B15B14505B15B15B14505B15
B15B14505B15B15B14505B15
=−−+−−
+−−−−−− (V-71)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
B16B16106B16B16B16106B16
B16B16106B16B16B16106B16
=−−+−−
+−−−−−− (V-72)
V.3.3 � Resolución del sistema
Resolviendo el sistema de 48 ecuaciones, de la (V-25) a (V-72), para las 4096 combinaciones de valores iniciales, por el método iterativo de Newton-Raphson con el programa "DOSINSENSI" realizado en MATLAB, se han conseguido 68 combinaciones diferentes de longitudes de manivelas y bielas en lugar de las 4032 teóricamente posibles. Esto es lógico ya que, por ejemplo, si la coordenada "Z123" de la posición prefijada "1" es mayor que la coordenada "Z123" de la posición prefijada "2", las 16 posibles combinaciones para un vértice de la plataforma quedarían reducidas a 6 (Fig. V-8), siendo entonces el número de posibles soluciones 63 = 216. Si este mismo razonamiento se aplica a las coordenadas "X123" e "Y123", se reducirán las posibles soluciones, resultando aceptable que éstas sean 68.
Fig. V-8 Posibles posiciones de un vértice de la plataforma móvil en PI
De las 4096 veces que se ha aplicado el método iterativo de Newton-
Raphson por medio del programa "DOSINSENSI", en muchos casos no converge a una solución, y en los casos que converge, lo hace a una de las 68 soluciones que pueden verse en las tablas (V-1) a (V-4).

Síntesis de un Manipulador 6-RKS
114
V.3.4 � Soluciones
Ángulo de la manivela
"1" θ1
Ángulo de la manivela
"2" θ2
Ángulo de la manivela
"3" θ3
Ángulo de la manivela
"4" θ4
Ángulo de la manivela
"5" θ5
Ángulo de la manivela
"6" θ6
1 1.7894 1.7897 1.7892 1.3522 4.9309 1.7893 2 4.4938 1.7897 1.7892 1.3522 4.9309 1.3522 3 1.7894 1.7897 1.7892 1.3522 1.3522 1.7893 4 1.7894 1.7897 1.7892 1.3522 1.3522 1.3522 5 1.7894 1.7897 1.7892 1.3522 1.3522 1.7893 6 1.7894 1.7897 1.7892 1.3522 4.9309 1.3522 7 1.7894 1.7897 4.494 4.9309 1.3522 4.4938 8 1.7894 1.7897 1.7892 1.3522 1.3522 1.3522 9 1.7894 1.7897 1.3524 1.3522 4.9309 1.7893
10 1.7894 1.7897 1.3524 1.3522 1.3522 1.3522 11 1.7894 1.7897 4.9308 4.9309 1.3522 4.4938 12 1.7894 1.7897 1.3524 1.3522 1.3522 4.9309 13 1.7894 1.7897 1.3524 1.3522 1.3522 1.7893 14 1.7894 1.7897 1.3524 1.3522 4.9309 1.3522 15 1.7894 1.7897 4.9308 4.9309 1.3522 4.4938 16 1.7894 1.7897 1.3524 1.3522 1.3522 1.3522 17 1.7894 4.4935 4.9308 4.9304 1.3522 1.7893 18 1.7894 4.4935 1.5708 4.9309 4.9309 4.9309 19 4.4938 1.3519 1.7892 1.3522 4.9309 1.3522 20 4.4938 1.3519 1.7892 4.9309 0.9762 4.4938 21 4.4938 1.3519 1.7892 1.3522 4.9309 4.9309 22 1.7894 1.3519 1.7892 1.3522 1.3522 1.7893 23 4.4938 1.3519 1.7892 1.3522 4.9309 1.3522 24 1.7894 1.3519 4.494 4.9309 1.3522 4.4938 25 1.7894 1.3519 4.494 4.9309 1.3522 4.9309 26 1.7894 1.3519 1.3524 1.3522 4.9309 1.7893 27 1.7894 1.3519 1.3524 1.3522 1.3522 1.3522 28 1.7894 4.9313 4.9308 4.9309 1.3522 4.4938 29 1.7894 1.3519 4.9308 4.9309 1.3522 4.9309 30 1.7894 1.3519 1.3524 1.3522 1.3522 1.7893 31 1.7894 1.3519 1.3524 1.3522 1.3522 1.3522 32 1.7894 4.9313 4.9308 4.9309 1.3522 4.4938 33 1.7894 1.3519 1.3524 1.3522 1.3522 1.3522

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
115
34 4.3216 1.7897 4.494 4.9309 4.9309 1.3522 35 1.3522 1.7897 1.7892 1.3522 1.3522 1.7893 36 1.3522 1.7897 1.7892 1.3522 4.9309 1.3522 37 1.3522 1.7897 1.7892 1.3522 1.3522 1.7893 38 4.931 1.7897 1.7892 1.3522 1.3522 1.3522 39 1.3522 1.7897 1.7892 1.3522 1.3522 1.7893 40 1.3522 1.7897 1.7892 1.3522 4.9309 1.3522 41 1.3522 1.7897 4.494 4.9309 1.3522 4.4938 42 4.931 1.7897 1.7892 1.3522 1.3522 1.3522 43 4.931 1.7897 1.3524 1.3522 4.9309 1.7893 44 1.3522 1.7897 1.3524 1.3522 4.9309 1.3522 45 1.3522 1.7897 4.9308 4.9309 1.3522 4.4938 46 1.3522 1.7897 4.9308 4.9309 1.3522 4.9309 47 4.931 1.7897 1.3524 1.3522 1.3522 1.7893 48 1.3522 1.7897 1.3524 1.3522 1.3522 1.3522 49 1.3522 1.7897 4.9308 4.9309 1.3522 4.4938 50 4.931 1.7897 1.3524 1.3522 1.3522 1.3522 51 1.3522 4.4935 1.5708 4.9309 4.9309 4.4938 52 1.3522 4.4935 1.5708 4.9309 4.9309 4.4938 53 4.931 1.3519 1.7892 1.3522 4.9309 1.7893 54 1.3522 1.3519 1.7892 1.3522 4.9309 1.3522 55 4.931 4.9313 1.7892 1.3522 1.3522 1.7893 56 4.931 4.9313 1.7892 1.3522 1.3522 1.3522 57 4.931 1.3519 1.7892 1.3522 1.3522 1.7893 58 1.3522 1.3519 1.7892 1.3522 4.9309 1.3522 59 1.3522 1.3519 4.494 4.9309 1.3522 4.4938 60 4.931 4.9313 1.7892 1.3522 1.3522 1.3522 61 1.3522 1.3519 1.3524 1.3522 4.9309 1.7893 62 1.3522 1.3519 1.3524 1.3522 1.3522 1.3522 63 4.931 4.9313 4.9308 1.3522 1.3522 1.7893 64 4.931 4.9313 4.9308 1.3522 1.3522 1.3522 65 1.3522 1.3519 1.3524 1.3522 4.9309 1.7893 66 1.3522 1.3519 1.3524 1.3522 1.3522 1.3522 67 4.931 4.9313 4.9308 4.9309 1.3522 1.7893 68 1.3522 1.3519 1.3524 1.3522 1.3522 1.3522
Tabla V-1 Ángulos de las manivelas en la primera posición.

Síntesis de un Manipulador 6-RKS
116
Ángulo de
la manivela "1" θ1
Ángulo de la manivela
"2" θ2
Ángulo de la manivela
"3" θ3
Ángulo de la manivela
"4" θ4
Ángulo de la manivela
"5" θ5
Ángulo de la manivela
"6" θ6
1 4.9048 4.9048 4.8982 4.3142 1.9689 4.8982 2 1.3784 4.9048 4.8982 4.3142 1.9689 1.385 3 4.9048 4.9048 4.8982 4.3142 1.1727 4.8982 4 4.9048 4.9048 4.8982 4.3142 1.1727 1.385 5 4.9048 4.9048 4.8982 1.1727 4.3142 4.8982 6 4.9048 4.9048 4.8982 1.1727 1.9689 1.385 7 4.9048 4.9048 1.385 5.1105 1.1727 1.385 8 4.9048 4.9048 4.8982 1.1727 1.1727 1.385 9 4.9048 4.9048 1.385 4.3142 1.9689 4.8982
10 4.9048 4.9048 1.385 4.3142 4.3142 1.385 11 4.9048 4.9048 4.8982 1.9689 1.1727 1.385 12 4.9048 4.9048 1.385 4.3142 1.1727 4.8982 13 4.9048 4.9048 1.385 1.1727 4.3142 4.8982 14 4.9048 4.9048 1.385 1.1727 1.9689 1.385 15 4.9048 4.9048 4.8982 5.1105 1.1727 1.385 16 4.9048 4.9048 1.385 1.1727 1.1727 1.385 17 4.9048 1.3784 4.8982 5.1078 4.3142 4.8982 18 4.9048 1.3784 1.5216 1.9689 5.1105 4.8982 19 1.3784 1.3784 4.8982 4.3142 1.9689 1.385 20 1.3784 1.3784 4.8982 1.9689 4.0397 1.385 21 1.3784 1.3784 4.8982 4.3142 5.1105 4.8982 22 4.9048 1.3784 4.8982 1.1727 4.3142 4.8982 23 1.3784 1.3784 4.8982 1.1727 1.9689 1.385 24 4.9048 1.3784 1.385 5.1105 1.1727 1.385 25 4.9048 1.3784 1.385 5.1105 1.1727 4.8982 26 4.9048 1.3784 1.385 4.3142 1.9689 4.8982 27 4.9048 1.3784 1.385 4.3142 4.3142 1.385 28 4.9048 4.9048 4.8982 1.9689 1.1727 1.385 29 4.9048 1.3784 4.8982 1.9689 1.1727 4.8982 30 4.9048 1.3784 1.385 1.1727 4.3142 4.8982 31 4.9048 1.3784 1.385 1.1727 4.3142 1.385 32 4.9048 4.9048 4.8982 5.1105 1.1727 1.385 33 4.9048 1.3784 1.385 1.1727 1.1727 1.385 34 1.1936 4.9048 1.385 1.9689 1.9689 1.385

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
117
35 1.3784 4.9048 4.8982 4.3142 4.3142 4.8982 36 1.3784 4.9048 4.8982 4.3142 1.9689 1.385 37 1.3784 4.9048 4.8982 4.3142 1.1727 4.8982 38 4.9048 4.9048 4.8982 4.3142 1.1727 1.385 39 1.3784 4.9048 4.8982 1.1727 4.3142 4.8982 40 1.3784 4.9048 4.8982 1.1727 1.9689 1.385 41 1.3784 4.9048 1.385 5.1105 1.1727 1.385 42 4.9048 4.9048 4.8982 1.1727 1.1727 1.385 43 4.9048 4.9048 1.385 4.3142 1.9689 4.8982 44 1.3784 4.9048 1.385 4.3142 1.9689 1.385 45 1.3784 4.9048 4.8982 1.9689 1.1727 1.385 46 1.3784 4.9048 4.8982 1.9689 1.1727 4.8982 47 4.9048 4.9048 1.385 1.1727 4.3142 4.8982 48 1.3784 4.9048 1.385 1.1727 4.3142 1.385 49 1.3784 4.9048 4.8982 5.1105 1.1727 1.385 50 4.9048 4.9048 1.385 1.1727 1.1727 1.385 51 1.3784 1.3784 1.5216 1.9689 1.9689 1.385 52 1.3784 1.3784 1.5216 5.1105 5.1105 1.385 53 4.9048 1.3784 4.8982 4.3142 1.9689 4.8982 54 1.3784 1.3784 4.8982 4.3142 1.9689 1.385 55 4.9048 4.9048 4.8982 4.3142 1.1727 4.8982 56 4.9048 4.9048 4.8982 4.3142 1.1727 1.385 57 4.9048 1.3784 4.8982 1.1727 4.3142 4.8982 58 1.3784 1.3784 4.8982 1.1727 1.9689 1.385 59 1.3784 1.3784 1.385 5.1105 1.1727 1.385 60 4.9048 4.9048 4.8982 1.1727 1.1727 1.385 61 1.3784 1.3784 1.385 4.3142 1.9689 4.8982 62 1.3784 1.3784 1.385 4.3142 4.3142 1.385 63 4.9048 4.9048 4.8982 4.3142 1.1727 4.8982 64 4.9048 4.9048 4.8982 4.3142 1.1727 1.385 65 1.3784 1.3784 1.385 1.1727 1.9689 4.8982 66 1.3784 1.3784 1.385 1.1727 4.3142 1.385 67 4.9048 4.9048 4.8982 5.1105 1.1727 4.8982 68 1.3784 1.3784 1.385 1.1727 1.1727 1.385
Tabla V-2 Ángulos de las manivelas para la segunda posición.

Síntesis de un Manipulador 6-RKS
118
Longitud
de la manivela
"1" R1
Longitud de la
manivela "2" R2
Longitud de la
manivela "3" R4
Longitud de la
manivela "4" R4
Longitud de la
manivela "5" R5
Longitud de la
manivela "6" R6
1 0.0537 0.0536 0.0528 0.0899 0.0899 0.0528 2 0.0537 0.0536 0.0528 0.0899 0.0899 0.7133 3 0.0537 0.0536 0.0528 0.0899 0.6792 0.0528 4 0.0537 0.0536 0.0528 0.0899 0.6792 0.7133 5 0.0537 0.0536 0.0528 0.6792 0.0899 0.0528 6 0.0537 0.0536 0.0528 0.6792 0.0899 0.7133 7 0.0537 0.0536 0.0528 0.6792 0.6792 0.0528 8 0.0537 0.0536 0.0528 0.6792 0.6792 0.7133 9 0.0537 0.0536 0.7136 0.0899 0.0899 0.0528
10 0.0537 0.0536 0.7136 0.0899 0.0899 0.7133 11 0.0537 0.0536 0.7136 0.0899 0.6792 0.0528 12 0.0537 0.0536 0.7136 0.0899 0.6792 0.7133 13 0.0537 0.0536 0.7136 0.6792 0.0899 0.0528 14 0.0537 0.0536 0.7136 0.6792 0.0899 0.7133 15 0.0537 0.0536 0.7136 0.6792 0.6792 0.0528 16 0.0537 0.0536 0.7136 0.6792 0.6792 0.7133 17 0.0537 0.0536 0.7136 0.6814 0.0899 0.0528 18 0.0537 0.0536 0.7665 0.0899 0.6792 0.7133 19 0.0537 0.7193 0.0528 0.0899 0.0899 0.7133 20 0.0537 0.7193 0.0528 0.0899 0.106 0.0528 21 0.0537 0.7193 0.0528 0.0899 0.6792 0.7133 22 0.0537 0.7193 0.0528 0.6792 0.0899 0.0528 23 0.0537 0.7193 0.0528 0.6792 0.0899 0.7133 24 0.0537 0.7193 0.0528 0.6792 0.6792 0.0528 25 0.0537 0.7193 0.0528 0.6792 0.6792 0.7133 26 0.0537 0.7193 0.7136 0.0899 0.0899 0.0528 27 0.0537 0.7193 0.7136 0.0899 0.0899 0.7133 28 0.0537 0.7193 0.7136 0.0899 0.6792 0.0528 29 0.0537 0.7193 0.7136 0.0899 0.6792 0.7133 30 0.0537 0.7193 0.7136 0.6792 0.0899 0.0528 31 0.0537 0.7193 0.7136 0.6792 0.0899 0.7133 32 0.0537 0.7193 0.7136 0.6792 0.6792 0.0528 33 0.0537 0.7193 0.7136 0.6792 0.6792 0.7133 34 0.0566 0.0536 0.0528 0.0899 0.0899 0.7133

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
119
35 0.7193 0.0536 0.0528 0.0899 0.0899 0.0528 36 0.7193 0.0536 0.0528 0.0899 0.0899 0.7133 37 0.7193 0.0536 0.0528 0.0899 0.6792 0.0528 38 0.7193 0.0536 0.0528 0.0899 0.6792 0.7133 39 0.7193 0.0536 0.0528 0.6792 0.0899 0.0528 40 0.7193 0.0536 0.0528 0.6792 0.0899 0.7133 41 0.7193 0.0536 0.0528 0.6792 0.6792 0.0528 42 0.7193 0.0536 0.0528 0.6792 0.6792 0.7133 43 0.7193 0.0536 0.7136 0.0899 0.0899 0.0528 44 0.7193 0.0536 0.7136 0.0899 0.0899 0.7133 45 0.7193 0.0536 0.7136 0.0899 0.6792 0.0528 46 0.7193 0.0536 0.7136 0.0899 0.6792 0.7133 47 0.7193 0.0536 0.7136 0.6792 0.0899 0.0528 48 0.7193 0.0536 0.7136 0.6792 0.0899 0.7133 49 0.7193 0.0536 0.7136 0.6792 0.6792 0.0528 50 0.7193 0.0536 0.7136 0.6792 0.6792 0.7133 51 0.7193 0.0536 0.7665 0.0899 0.0899 0.0528 52 0.7193 0.0536 0.7665 0.6792 0.6792 0.0528 53 0.7193 0.7193 0.0528 0.0899 0.0899 0.0528 54 0.7193 0.7193 0.0528 0.0899 0.0899 0.7133 55 0.7193 0.7193 0.0528 0.0899 0.6792 0.0528 56 0.7193 0.7193 0.0528 0.0899 0.6792 0.7133 57 0.7193 0.7193 0.0528 0.6792 0.0899 0.0528 58 0.7193 0.7193 0.0528 0.6792 0.0899 0.7133 59 0.7193 0.7193 0.0528 0.6792 0.6792 0.0528 60 0.7193 0.7193 0.0528 0.6792 0.6792 0.7133 61 0.7193 0.7193 0.7136 0.0899 0.0899 0.0528 62 0.7193 0.7193 0.7136 0.0899 0.0899 0.7133 63 0.7193 0.7193 0.7136 0.0899 0.6792 0.0528 64 0.7193 0.7193 0.7136 0.0899 0.6792 0.7133 65 0.7193 0.7193 0.7136 0.6792 0.0899 0.0528 66 0.7193 0.7193 0.7136 0.6792 0.0899 0.7133 67 0.7193 0.7193 0.7136 0.6792 0.6792 0.0528 68 0.7193 0.7193 0.7136 0.6792 0.6792 0.7133
Tabla V-3 Longitudes de las manivelas para dos CIP

Síntesis de un Manipulador 6-RKS
120
Longitud
biela "1" L1
Longitud biela "2"
L2
Longitud biela "3"
L3
Longitud biela "4"
L4
Longitud biela "5"
L5
Longitud biela "6"
L6 1 0.7466 0.7466 0.7457 0.6095 0.6095 0.7457 2 0.7466 0.7466 0.7457 0.6095 0.6095 0.2056 3 0.7466 0.7466 0.7457 0.6095 0.2005 0.7457 4 0.7466 0.7466 0.7457 0.6095 0.2005 0.2056 5 0.7466 0.7466 0.7457 0.2005 0.6095 0.7457 6 0.7466 0.7466 0.7457 0.2005 0.6095 0.2056 7 0.7466 0.7466 0.7457 0.2005 0.2005 0.7457 8 0.7466 0.7466 0.7457 0.2005 0.2005 0.2056 9 0.7466 0.7466 0.2055 0.6095 0.6095 0.7457
10 0.7466 0.7466 0.2055 0.6095 0.6095 0.2056 11 0.7466 0.7466 0.2055 0.6095 0.2005 0.7457 12 0.7466 0.7466 0.2055 0.6095 0.2005 0.2056 13 0.7466 0.7466 0.2055 0.2005 0.6095 0.7457 14 0.7466 0.7466 0.2055 0.2005 0.6095 0.2056 15 0.7466 0.7466 0.2055 0.2005 0.2005 0.7457 16 0.7466 0.7466 0.2055 0.2005 0.2005 0.2056 17 0.7466 0.7466 0.2055 0.1993 0.6095 0.7457 18 0.7466 0.7466 0.1654 0.6095 0.2005 0.2056 19 0.7466 0.2071 0.7457 0.6095 0.6095 0.2056 20 0.7466 0.2071 0.7457 0.6095 0.6095 0.7457 21 0.7466 0.2071 0.7457 0.6095 0.2005 0.2056 22 0.7466 0.2071 0.7457 0.2005 0.6095 0.7457 23 0.7466 0.2071 0.7457 0.2005 0.6095 0.2056 24 0.7466 0.2071 0.7457 0.2005 0.2005 0.7457 25 0.7466 0.2071 0.7457 0.2005 0.2005 0.2056 26 0.7466 0.2071 0.2055 0.6095 0.6095 0.7457 27 0.7466 0.2071 0.2055 0.6095 0.6095 0.2056 28 0.7466 0.2071 0.2055 0.6095 0.2005 0.7457 29 0.7466 0.2071 0.2055 0.6095 0.2005 0.2056 30 0.7466 0.2071 0.2055 0.2005 0.6095 0.7457 31 0.7466 0.2071 0.2055 0.2005 0.6095 0.2056 32 0.7466 0.2071 0.2055 0.2005 0.2005 0.7457 33 0.7466 0.2071 0.2055 0.2005 0.2005 0.2056 34 0.7466 0.7466 0.7457 0.6095 0.6095 0.2056 35 0.2071 0.7466 0.7457 0.6095 0.6095 0.7457

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
121
36 0.2071 0.7466 0.7457 0.6095 0.6095 0.2056 37 0.2071 0.7466 0.7457 0.6095 0.2005 0.7457 38 0.2071 0.7466 0.7457 0.6095 0.2005 0.2056 39 0.2071 0.7466 0.7457 0.2005 0.6095 0.7457 40 0.2071 0.7466 0.7457 0.2005 0.6095 0.2056 41 0.2071 0.7466 0.7457 0.2005 0.2005 0.7457 42 0.2071 0.7466 0.7457 0.2005 0.2005 0.2056 43 0.2071 0.7466 0.2055 0.6095 0.6095 0.7457 44 0.2071 0.7466 0.2055 0.6095 0.6095 0.2056 45 0.2071 0.7466 0.2055 0.6095 0.2005 0.7457 46 0.2071 0.7466 0.2055 0.6095 0.2005 0.2056 47 0.2071 0.7466 0.2055 0.2005 0.6095 0.7457 48 0.2071 0.7466 0.2055 0.2005 0.6095 0.2056 49 0.2071 0.7466 0.2055 0.2005 0.2005 0.7457 50 0.2071 0.7466 0.2055 0.2005 0.2005 0.2056 51 0.2071 0.7466 0.1654 0.6095 0.6095 0.7457 52 0.2071 0.7466 0.1654 0.2005 0.2005 0.7457 53 0.2071 0.2071 0.7457 0.6095 0.6095 0.7457 54 0.2071 0.2071 0.7457 0.6095 0.6095 0.2056 55 0.2071 0.2071 0.7457 0.6095 0.2005 0.7457 56 0.2071 0.2071 0.7457 0.6095 0.2005 0.2056 57 0.2071 0.2071 0.7457 0.2005 0.6095 0.7457 58 0.2071 0.2071 0.7457 0.2005 0.6095 0.2056 59 0.2071 0.2071 0.7457 0.2005 0.2005 0.7457 60 0.2071 0.2071 0.7457 0.2005 0.2005 0.2056 61 0.2071 0.2071 0.2055 0.6095 0.6095 0.7457 62 0.2071 0.2071 0.2055 0.6095 0.6095 0.2056 63 0.2071 0.2071 0.2055 0.6095 0.2005 0.7457 64 0.2071 0.2071 0.2055 0.6095 0.2005 0.2056 65 0.2071 0.2071 0.2055 0.2005 0.6095 0.7457 66 0.2071 0.2071 0.2055 0.2005 0.6095 0.2056 67 0.2071 0.2071 0.2055 0.2005 0.2005 0.7457 68 0.2071 0.2071 0.2055 0.2005 0.2005 0.2056
Tabla V-4 Longitudes de las bielas para dos CIP

Síntesis de un Manipulador 6-RKS
122
V.3.5 � Conclusiones de la síntesis para dos CIP
Observando los valores de las longitudes de las manivelas, se observa, que de las 68 combinaciones solamente es aceptable la primera, ya que las demás tienen alguna manivela de mayor longitud que su biela correspondiente y por lo tanto, esa manivela no podría alcanzar las dos posiciones de insensitividad al haber interferencia de la plataforma móvil con la fija.
Como conclusión, para que el manipulador del ejemplo pueda conseguir las dos posiciones predeterminadas, deberá tener las dimensiones siguientes:
Longitudes de manivelas:
R1 = 0.0537 metros. R2 = 0.0536 " R3 = 0.0528 " R4 = 0.0899 " R5 = 0.0899 " R6 = 0.0528 "
Y longitudes de bielas:
L1 = 0.7466 metros. L2 = 0.7466 " L3 = 0.7457 " L4 = 0.6095 " L5 = 0.6095 " L6 = 0.7457 "
Para la solución aceptable, otra conclusión interesante es, que la
primera posición se consigue con las manivelas "1", "2", "3", "4" y "6" hacia arriba y la "5" hacia abajo y la segunda posición se consigue con las manivelas totalmente opuestas, es decir, las manivelas "1", "2", "3", "4" y "6" hacia abajo y la "5" hacia arriba.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
123
V.4 � EJEMPLO NUMÉRICO PARA TRES CIP
En este ejemplo, siguiendo el proceso expuesto en el apartado V.2.3, se sintetizará un manipulador paralelo 6-RKS para lograr que tres posiciones predeterminadas de la plataforma móvil se consigan estando el manipulador en configuración de insensitividad de posición (CIP).
Con el manipulador expuesto como ejemplo del Capítulo IV, se desea
posicionar horizontalmente para realizar un mecanizado, tres triángulos equiláteros de 0.15 metros de altura, y que forman un ángulo de 10º entre ellos (Fig. V-9), de forma que:
- En la primera posición la plataforma móvil y el triángulo "1" deben estar
horizontales, la arista entre los triángulos "1" y "2" paralela al eje "Y" del manipulador y con el baricentro del triángulo "1" sobre el eje "Z".
- En la segunda posición el triángulo "2" debe estar horizontal, con la arista entre los triángulos "1" y "2" paralela al eje "Y" del manipulador y con el baricentro del triángulo "2" sobre el eje "Z".
- Y en la tercera posición el triángulo "3" horizontal, con la arista de la derecha paralela al eje "Y" y con el baricentro sobre el eje "Z".
La altura del baricentro de los triángulos, en todos los casos, debe ser
0.1 metros por encima del baricentro del triángulo de la plataforma móvil correspondiente a la primera CIP del ejemplo del Capítulo IV, es decir, a 0.7498 metros. V.4.1 � Introducción de datos
Realizando los cálculos oportunos resulta que las coordenadas de los vértices de la plataforma móvil para la primera posición serán las siguientes:
X123A = -0.1441 Y123A = 0.25 Z123A = 0.6498
X145A = 0.2887 Y145A = 0 Z145A = 0.6498
X161A = -0.1441 Y161A = -0.25 Z161A = 0.6498

Síntesis de un Manipulador 6-RKS
124
Fig. V-9 Posiciones de las superficies a mecanizar
Para la segunda posición la pieza debe realizar un giro de 10º alrededor de un eje paralelo al eje "Y", que corte al eje "Z" y que esté 0.4715 metros por debajo de la plataforma móvil, resultando las coordenadas siguientes: X123B = -0.0603 Y123B = 0.25 Z123B = 0.6677 X145B = 0.3656 Y145B = 0 Z145B = 0.5919 X161B = -0.0603 Y161B = -0.25 Z161B = 0.6677

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
125
Para la tercera posición, partiendo de la primera, la pieza debe realizar un giro de 10º alrededor de un eje paralelo a los ejes de los actuadores "3" y "4", que corte al eje "Z" y que esté 0.4715 metros por debajo de plataforma móvil, resultando las coordenadas siguientes de los vértices de la plataforma móvil: X123C = -0.1863 Y123C = 0.1773 Z123C = 0.6677 X145C = 0.3656 Y145C = -0.073 Z145C = 0.6677 X161C = -0.1828 Y161C = -0.317 Z161C = 0.5919
Tomando las dimensiones de la plataforma fija y la posición de los actuadores igual que en el ejemplo del Capítulo IV, resultará que las coordenadas de los puntos 01 a 06 serán:
01 = (-0.288675134, -0.05, 0) 02 = (-0.288675134, 0.05, 0) 03 = (0.101036297, 0.275, 0) 04 = (0.187638837, 0.225, 0) 05 = (0.187638837, -0.225, 0) 06 = (0.101036297, -0.275, 0)
Como valores para la primera iteración se tomará, longitudes de las
manivelas: R1 = R2 = R3 = R4 = R5 = R6 = 0.1 metros. Y como longitudes de las bielas: L1 = L2 = L3 = L4 = L5 = L6 = 0.6 metros
Las longitudes de los lados del triángulo de la plataforma móvil ya quedan determinados al introducir las coordenadas de los vértices para las tres posiciones preestablecidas.
Para las coordenadas de los extremos de las manivelas, puntos del 11 al 16, se irán tomando como coordenadas las 64 x 64 x 64 = 262.144 combinaciones de coordenadas de estos puntos obtenidas en las 64 CIP del manipulador del ejemplo del Capítulo IV.

Síntesis de un Manipulador 6-RKS
126
V.4.2 � Condiciones de restricción
Como condiciones de restricción se tendrá:
Para las longitudes constantes de las manivelas en la primera posición:
( ) ( ) ( ) 0RZZYYXX 21
201A11
201A11
201A11 =−−+−+− (V-73)
( ) ( ) ( ) 0RZZYYXX 22
202A12
202A12
202A12 =−−+−+− (V-74)
( ) ( ) ( ) 0RZZYYXX 23
203A13
203A13
203A13 =−−+−+− (V-75)
( ) ( ) ( ) 0RZZYYXX 24
204A14
204A14
204A14 =−−+−+− (V-76)
( ) ( ) ( ) 0RZZYYXX 25
205A15
205A15
205A15 =−−+−+− (V-77)
( ) ( ) ( ) 0RZZYYXX 26
206A16
206A16
206A16 =−−+−+− (V-78)
Para las longitudes constantes de las manivelas en la segunda posición:
( ) ( ) ( ) 0RZZYYXX 21
201B11
201B11
201B11 =−−+−+− (V-79)
( ) ( ) ( ) 0RZZYYXX 22
202B12
202B12
202B12 =−−+−+− (V-80)
( ) ( ) ( ) 0RZZYYXX 23
203B13
203B13
203B13 =−−+−+− (V-81)
( ) ( ) ( ) 0RZZYYXX 24
204B14
204B14
204B14 =−−+−+− (V-82)
( ) ( ) ( ) 0RZZYYXX 25
205B15
205B15
205B15 =−−+−+− (V-83)
( ) ( ) ( ) 0RZZYYXX 26
206B16
206B16
206B16 =−−+−+− (V-84)
Para las longitudes constantes de las manivelas en la tercera posición:
( ) ( ) ( ) 0RZZYYXX 21
201C11
201C11
201C11 =−−+−+− (V-85)
( ) ( ) ( ) 0RZZYYXX 22
202C12
202C12
202C12 =−−+−+− (V-86)
( ) ( ) ( ) 0RZZYYXX 23
203C13
203C13
203C13 =−−+−+− (V-87)
( ) ( ) ( ) 0RZZYYXX 24
204C14
204C14
204C14 =−−+−+− (V-88)
( ) ( ) ( ) 0RZZYYXX 25
205C15
205C15
205C15 =−−+−+− (V-89)
( ) ( ) ( ) 0RZZYYXX 26
206C16
206C16
206C16 =−−+−+− (V-90)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
127
Para las longitudes constantes de las bielas en la primera posición:
( ) ( ) ( ) 0LZZYYXX 21
2A11A161
2A11A161
2A11A161 =−−+−+− (V-91)
( ) ( ) ( ) 0LZZYYXX 22
2A12A123
2A12A123
2A12A123 =−−+−+− (V-92)
( ) ( ) ( ) 0LZZYYXX 23
2A13A123
2A13A123
2A13A123 =−−+−+− (V-93)
( ) ( ) ( ) 0LZZYYXX 24
2A14A145
2A14A145
2A14A145 =−−+−+− (V-94)
( ) ( ) ( ) 0LZZYYXX 25
2A15A145
2A15A145
2A15A145 =−−+−+− (V-95)
( ) ( ) ( ) 0LZZYYXX 26
2A16A161
2A16A161
2A16A161 =−−+−+− (V-96)
Para las longitudes constantes de las bielas en la segunda posición:
( ) ( ) ( ) 0LZZYYXX 21
2B11B161
2B11B161
2B11B161 =−−+−+− (V-97)
( ) ( ) ( ) 0LZZYYXX 22
2B12B123
2B12B123
2B12B123 =−−+−+− (V-98)
( ) ( ) ( ) 0LZZYYXX 23
2B13B123
2B13B123
2B13B123 =−−+−+− (V-99)
( ) ( ) ( ) 0LZZYYXX 24
2B14B145
2B14B145
2B14B145 =−−+−+− (V-100)
( ) ( ) ( ) 0LZZYYXX 25
2B15B145
2B15B145
2B15B145 =−−+−+− (V-101)
( ) ( ) ( ) 0LZZYYXX 26
2B16B161
2B16B161
2B16B161 =−−+−+− (V-102)
Para las longitudes constantes de las bielas en la tercera posición:
( ) ( ) ( ) 0LZZYYXX 21
2C11C161
2C11C161
2C11C161 =−−+−+− (V-103)
( ) ( ) ( ) 0LZZYYXX 22
2C12C123
2C12C123
2C12C123 =−−+−+− (V-104)
( ) ( ) ( ) 0LZZYYXX 23
2C13C123
2C13C123
2C13C123 =−−+−+− (V-105)
( ) ( ) ( ) 0LZZYYXX 24
2C14C145
2C14C145
2C14C145 =−−+−+− (V-106)
( ) ( ) ( ) 0LZZYYXX 25
2C15C145
2C15C145
2C15C145 =−−+−+− (V-107)
( ) ( ) ( ) 0LZZYYXX 26
2C16C161
2C16C161
2C16C161 =−−+−+− (V-108)

Síntesis de un Manipulador 6-RKS
128
Para la perpendicularidad de las circunferencias descritas por los extremos de las manivelas con los ejes de los actuadores respectivos, en la primera posición:
0YY 01A11 =− (V-109) 0YY 02A12 =− (V-110)
( ) ( ) 0YYXX3 03A1303A13 =−−−⋅ (V-111) ( ) ( ) 0YYXX3 04A1404A14 =−−−⋅ (V-112) ( ) ( ) 0YYXX3 05A1505A15 =−−−⋅ (V-113) ( ) ( ) 0YYXX3 06A1606A16 =−−−⋅ (V-114)
Para la perpendicularidad de las circunferencias descritas por los extremos de las manivelas con los ejes de los actuadores respectivos, en la segunda posición:
0YY 01B11 =− (V-115) 0YY 02B12 =− (V-116)
( ) ( ) 0YYXX3 03B1303B13 =−−−⋅ (V-117) ( ) ( ) 0YYXX3 04B1404B14 =−−−⋅ (V-118) ( ) ( ) 0YYXX3 05B1505B15 =−−−⋅ (V-119) ( ) ( ) 0YYXX3 06B1606B16 =−−−⋅ (V-120)
Para la perpendicularidad de las circunferencias descritas por los extremos de las manivelas con los ejes de los actuadores respectivos, en la tercera posición:
0YY 01C11 =− (V-121) 0YY 02C12 =− (V-122)
( ) ( ) 0YYXX3 03C1303C13 =−−−⋅ (V-123) ( ) ( ) 0YYXX3 04C1404C14 =−−−⋅ (V-124) ( ) ( ) 0YYXX3 05C1505C15 =−−−⋅ (V-125) ( ) ( ) 0YYXX3 06C1606C16 =−−−⋅ (V-126)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
129
Para la condición de que el eje del actuador, la manivela y la biela de cada cadena deben estar contenidas en un plano, para la primera posición de la plataforma móvil:
( ) ( ) ( ) ( ) 0ZZXXXXZZ A11A16101A11A11A16101A11 =−⋅−−−⋅− (V-127) ( ) ( ) ( ) ( ) 0ZZXXXXZZ A12A12302A12A12A12302A12 =−⋅−−−⋅− (V-128)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
A13A12303A13A13A12303A13
A13A12303A13A13A12303A13
=−−+−−
+−−−−−− (V-129)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
A14A14504A14A14A14504A14
A14A14504A14A14A14504A14
=−−+−−
+−−−−−− (V-130)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
A15A14505A15A15A14505A15
A15A14505A15A15A14505A15
=−−+−−
+−−−−−− (V-131)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
A16A16106A16A16A16106A16
A16A16106A16A16A16106A16
=−−+−−
+−−−−−− (V-132)
Para la condición de que el eje del actuador, la manivela y la biela de
cada cadena deben estar contenidas en un plano, para la segunda posición de la plataforma móvil:
( ) ( ) ( ) ( ) 0ZZXXXXZZ B11B16101B11B11B16101B11 =−⋅−−−⋅− (V-133) ( ) ( ) ( ) ( ) 0ZZXXXXZZ B12B12302B12B12B12302B12 =−⋅−−−⋅− (V-134)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
B13B12303B13B13B12303B13
B13B12303B13B13B12303B13
=−−+−−
+−−−−−− (V-135)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
B14B14504B14B14B14504B14
B14B14504B14B14B14504B14
=−−+−−
+−−−−−− (V-136)

Síntesis de un Manipulador 6-RKS
130
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
B15B14505B15B15B14505B15
B15B14505B15B15B14505B15
=−−+−−
+−−−−−− (V-137)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
B16B16106B16B16B16106B16
B16B16106B16B16B16106B16
=−−+−−
+−−−−−− (V-138)
Para la condición de que el eje del actuador, la manivela y la biela de
cada cadena deben estar contenidas en un plano, para la tercera posición de la plataforma móvil:
( ) ( ) ( ) ( ) 0ZZXXXXZZ C11C16101C11C11C16101C11 =−⋅−−−⋅− (V-139) ( ) ( ) ( ) ( ) 0ZZXXXXZZ C12C12302C12C12C12302C12 =−⋅−−−⋅− (V-140)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
C13C12303C13C13C12303C13
C13C12303C13C13C12303C13
=−−+−−
+−−−−−− (V-141)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
C14C14504C14C14C14504C14
C14C14504C14C14C14504C14
=−−+−−
+−−−−−− (V-142)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
C15C14505C15C15C14505C15
C15C14505C15C15C14505C15
=−−+−−
+−−−−−− (V-143)
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0ZZ·XXZZ·YY3
YY·ZZ3XX·ZZ
C16C16106C16C16C16106C16
A16C16106C16C16C16106C16
=−−+−−
+−−−−−− (V-144)
V.4.3 � Resolución del sistema
Resolviendo este sistema de 72 ecuaciones (V-73) a (V-144) por el método de Newton-Raphson para las 262.144 combinaciones de valores iniciales por medio del programa "TRESINSENSI" realizado en MATLAB, tomando como variables las 54 coordenadas de los extremos de las manivelas, las doce longitudes de manivelas y bielas y las seis coordenadas "X" de los actuadores, se han conseguido 1701 combinaciones diferentes de longitudes de manivelas y bielas y coordenadas "X" de los actuadores.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
131
V.4.4 � Soluciones
De las 262.144 iteraciones realizadas en muchos casos no converge a una solución, y en otros muchos casos converge a una de las 1701 soluciones citadas.
Cabe resaltar que se han obtenido 1.701 soluciones diferentes en vez
de las 198.144 teóricamente posibles. Esto es lógico ya que como se ha visto en el caso de dos posiciones prefijadas, no todas las combinaciones teóricamente posibles son posibles en la realidad.
Una de estas soluciones es por ejemplo:
Longitudes de las manivelas:
R1 = 0.0065 metros. R4 = 0.0066 metros. R2 = 0.0014 " R5 = 0.0094 " R3 = 0.0123 " R6 = 0.0141 "
Longitudes de las bielas: L1 = 0.6960 metros. L4 = 0.7317 metros. L2 = 0.6625 " L5 = 0.7579 " L3 = 0.8765 " L6 = 0.7308 "
Coordenadas "X" de los actuadores: X01 = 0.1471 metros. X04 = -0.2488 metros. X02 = -0.0348 " X05 = 0.0115 " X03 = -0.1552 " X06 = 0.2690 "
En la mayoría de las soluciones, la posición de los actuadores es tal que se pueden producir interferencias entre las bielas de distintas cadenas cinemáticas. Habría que estudiar más a fondo este problema, haciendo variar por ejemplo las coordenadas "Y" ó "Z" de los actuadores para ver que otras soluciones aparecen, también se puede prefijar de otra forma diferente las tres posiciones de la plataforma móvil, ya que lo importante es la posición relativa entre las tres posiciones prefijadas.

Síntesis de un Manipulador 6-RKS
132
V.5 - CONCLUSIONES El Manipulador Paralelo 6-RKS puede alcanzar 64 configuraciones de
insensitividad de posición (CIP) y, dadas las ventajas de estas configuraciones expuestas en el Capítulo IV, resulta interesante poder sintetizar este tipo de mecanismos de forma que la posición de la plataforma móvil, en varias de estas configuraciones, coincida con unas posiciones deseadas.
En este capítulo, se ha puesto de manifiesto que conseguir que las 64
CIP posibles coincidan con posiciones predeterminadas es muy difícil por la gran cantidad de variables que habría que introducir en cada cadena cinemática (actuador-manivela-biela) de unión de la plataforma fija con la móvil.
También se ha visto que para conseguir dos posiciones de la
plataforma móvil estando el manipulador en CIP es necesario que puedan variar las longitudes de las manivelas y de las bielas. Si se desea conseguir tres posiciones predeterminadas en CIP habrá que añadir otra variable más por cada cadena, por ejemplo, las coordenadas "X" de los actuadores, y así sucesivamente. Cuantas más posiciones predeterminadas se desee lograr, estando el manipulador en CIP, más variables se deberán introducir en el proceso de síntesis.
Se ha propuesto un método numérico para la obtención de los valores
de las variables de diseño de forma que las posiciones deseadas se consigan en CIP, poniendo de manifiesto que hay muchas combinaciones de valores de las variables que lo cumplen. A estos diferentes valores se llega dependiendo de los valores iniciales de cada proceso iterativo utilizando el método de Newton-Raphson. Por ello, se toman como valores iniciales de iteración todas las posibles combinaciones de valores de las 64 CIP alcanzadas por el manipulador paralelo del ejemplo del Capítulo IV.
Si las posiciones predeterminadas son en número superior a tres, el
número de combinaciones de valores iniciales, correspondientes a las CIP del manipulador del ejemplo del Capítulo IV, es tan grande que en este caso es interesante tomar de forma aleatoria valores entre todas las combinaciones posibles y aplicar el proceso iterativo hasta que se consigan unos valores de las variables de diseño que resulten aceptables.
En el ejemplo numérico, para conseguir que dos posiciones prefijadas
de la plataforma móvil se consigan estando el manipulador en CIP, se han conseguido 68 combinaciones diferentes de longitudes de manivelas y bielas.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
133
Para tres posiciones de la plataforma móvil estando el manipulador en CIP, se han obtenido 1.701 soluciones diferentes de longitudes de manivelas y bielas y coordenadas "X" de los actuadores. En estas soluciones, la posición de los actuadores es tal que se pueden producir interferencias entre las bielas de distintas cadenas cinemáticas, por lo que se deberá estudiar más a fondo esta síntesis.

Síntesis de un Manipulador 6-RKS
134

CAPÍTULO VI
COMPROBACIÓN DEL GIRO DE MANIVELAS

Comprobación del giro de manivelas
136

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
137
CAPÍTULO VI - COMPROBACIÓN DEL GIRO
DE MANIVELAS
VI.1 - INTRODUCCIÓN
En los capítulos anteriores, se ha visto que el manipulador paralelo
6-RKS de Hunt tiene 64 configuraciones de insensitividad de posición (CIP) de la plataforma móvil, las ventajas de estas configuraciones, y que se puede diseñar un manipulador de forma que se consiga que varias posiciones predeterminadas de la plataforma móvil se consigan estando el manipulador en CIP. Esto se logra a base de construir el manipulador con unas determinadas longitudes para las manivelas y bielas y unas coordenadas "X" e "Y" para los actuadores sobre la plataforma fija.
En este capítulo, se estudiará un proceso, siguiendo unas reglas que
tienen cierta similitud con las leyes Grashof, para comprobar si las seis manivelas de un manipulador, con unas determinadas dimensiones, son capaces de dar vueltas completas y, por lo tanto, la plataforma móvil es capaz de alcanzar todas las configuraciones de insensitividad de posición posibles.
VI.2 - SITUACIÓN ACTUAL En el mecanismo plano formado por el cuadrilátero articulado, la ley
de Grashof [GRA. 1883] indica que para que uno de los eslabones sea capaz de dar vueltas completas y, por lo tanto, pueda ser un mecanismo de manivela oscilador, alcanzando dos posiciones de insensitividad del eslabón oscilador, se debe cumplir que la suma de las longitudes del eslabón más largo y del más corto debe ser menor que la suma de las longitudes de los eslabones de longitud intermedia.
De forma similar, la movilidad del cuadrilátero articulado espacial, ha
sido estudiada, entre otros, por Hunt [HUN. 59], Harrisberger [HAR. 64], Skreiner [SKR. 67], Freudenstein y Kiss [FRE. 69], Sticher [STI. 70], Bottema [BOT. 71], Gupta y Radcliffe [GUP. 71], Freudenstein y Primrose [FRE. 76], Söylemez y Freudenstein [SOY. 82], Gupta y Kazerounian [GUP. 83], Sandor y Zhuang [SAN. 84], Alizade y Sandor [ALI. 85] y Williams y Reinholtz [WIL. 87]. Y en otros tipos de mecanismos por Rastegar y Deravi [RAS. 87-1] y [RAS. 87-2] y Rastegar [RAS. 88], [RAS. 89] y [RAS. 92]. En estos estudios,

Comprobación del giro de manivelas
138
se llega a la conclusión que no se puede definir una ley tan sencilla como la de Grashof y que se debe seguir un determinado proceso para determinar si el eslabón de entrada será capaz de dar vueltas completas.
VI.3 - PROCESO A SEGUIR Para comprobar si se pueden obtener las 64 CIP, de forma similar al
cuadrilátero articulado espacial, se establecerá un proceso que se debe seguir para determinar si es posible o no alcanzar todas las configuraciones de insensitividad.
VI.3.1 - Dimensiones previas En este capítulo, con el fin de simplificar los cálculos y sin perder
generalidad en el proceso, se considerará que los ejes de los actuadores del manipulador, al igual que el considerado en el Capítulo V, forman un triángulo equilátero.
Fig. VI-1 Longitudes de manivelas para evitar interferencias

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
139
Por conveniencia constructiva, para que no interfieran las distintas manivelas, se tomarán éstas con unas longitudes de forma que no lleguen a las bisectrices de los ángulos del triángulo que forman los ejes de los actuadores sobre la plataforma fija (Fig. VI-1).
Teniendo en cuenta las consideraciones anteriores, resulta que las
longitudes de las manivelas deberán ser:
R1 < 63 (L-2E1) (VI-1)
R2 < 63 (L-2E2) (VI-2)
R3 < 63 (L-2E3) (VI-3)
R4 < 63 (L-2E4) (VI-4)
R5 < 63 (L-2E5) (VI-5)
R6 < 63 (L-2E6) (VI-6)
Por ejemplo, suponiendo que la longitud del lado del triángulo
formado por los ejes de los actuadores "L" sea 1 metro y el descentramiento del actuador respecto del eje de simetría "E" sea 0.05 metros, resulta que la longitud de las manivelas debe ser menor de 0.2598 metros.
Para que la plataforma móvil esté siempre por encima de la plataforma
fija, aunque las manivelas den vueltas completas, se debe cumplir que la longitud de la manivela sea siempre inferior al de la biela correspondiente:
R1 < L1 (VI-7) R2 < L2 (VI-8) R3 < L3 (VI-9) R4 < L4 (VI-10) R5 < L5 (VI-11) R6 < L6 (VI-12)

Comprobación del giro de manivelas
140
VI.3.2 - Comprobación de la longitud de las bielas Según se ve en la figura VI-2, las bielas "2" y "3" se unen a la
plataforma móvil en el punto "123", las bielas "4" y "5" en el punto "145" y las bielas "6" y "1" en el punto "161". Para que las dos bielas correspondientes a un vértice de la plataforma móvil se puedan unir a ese punto, y además las manivelas correspondientes a esas bielas puedan dar vueltas completas se deberán cumplir ciertas condiciones.
Analizando la figura VI-2 se observa que, por ejemplo, para que las
bielas "2" y "3" lleguen a poder conectarse al punto "123" de la plataforma móvil es necesario que las bielas, conectadas entre ellas, sean capaces de unir los puntos "12" y "13". De forma similar, las bielas "4" y "5" deberán ser capaces de unir los puntos "14" y "15" y las bielas "1" y "6" deberán poder unir los puntos "11" y "16".
Fig. VI-2 Uniones de bielas y manivelas

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
141
VI.3.2.1 - Comprobación de la longitud de las bielas "2" y "3" Centrándose en las bielas "2" y "3" (Fig. VI-3), para que puedan
conectar los puntos "12" y "13" se debe cumplir que: - La suma de las longitudes de las dos bielas sea mayor que la mínima
distancia entre estos dos puntos. - El módulo de la diferencia de las longitudes de las dos bielas sea menor que
la distancia máxima entre estos dos puntos. Para ver que son necesarias estas dos condiciones basta con considerar
que los puntos "12", "13" y "123" forman un triángulo y por lo tanto se debe de cumplir que la suma de las longitudes de dos lados sea mayor que la longitud del otro lado.
Fig. VI-3 Conjunto de manivelas y bielas "2" y "3"
Fig. VI-4 Sentido del ángulo de las manivelas

Comprobación del giro de manivelas
142
Para determinar las distancias máxima y mínima entre los puntos "12" y "13", teniendo en cuenta que los ejes de los actuadores forman un triángulo equilátero, tomando el origen de los ángulos de las manivelas en el interior del triángulo formado por los ejes de los actuadores y sentido según se indica en la figura VI-4, siendo el origen de coordenadas el baricentro del triángulo formado por los ejes de los actuadores, con los ejes "X" e "Y" contenidos en el plano de los ejes de los actuadores, con el eje "Y" paralelo a los ejes de los actuadores "1" y "2" y el eje "Z" hacia arriba, se plantean las coordenadas de estos puntos, que serán:
X12 = X02 + R2 cos θ2 (VI-13) Y12 = Y02 (VI-14) Z12 = Z02 + R2 sin θ2 (VI-15) X13 = X03 � 1/2 R3 cos θ3 (VI-16) Y13 = Y03 � 3 /2 R3 cos θ3 (VI-17) Z13 = Z03 + R3 sin θ3 (VI-18)
Las coordenadas de los puntos "12" y "13" irán variando al girar las
manivelas "2" y "3" y el cuadrado de la distancia entre ellos será:
(X03 � 1/2 R3 cos θ3 - X02 - R2 cos θ2)2 + (Y03 � 3 /2 R3 cos θ3 - Y02)2 + + (Z03 + R3 sin θ3 - Z02 - R2 sin θ2)2 = D2 (VI-19)
La distancia será máxima si es máximo su cuadrado y lo mismo
ocurrirá con la distancia mínima. Para hallar las distancias máxima y mínima al variar los ángulos "θ2" y "θ3", se deriva la distancia al cuadrado respecto de estos ángulos y se iguala a cero.
Derivando la ecuación (VI-19) respecto de "θ2" e igualando a cero
δθδ
2
2D = 2 (X03 � 1/2 R3 cos θ3 - X02 - R2 cos θ2) R2 sin θ2 �
- 2 (Z03 + R3 sin θ3 - Z02 - R2 sin θ2) R2 cos θ2 = 0 (VI-20)
Simplificando
(X03 � 1/2 R3 cos θ3 - X02 - R2 cos θ2) sin θ2 � - (Z03 + R3 sin θ3 - Z02 - R2 sin θ2) cos θ2 = 0 (VI-21)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
143
Dividiendo por "cos θ2" resulta que, para que la derivada sea cero y por lo tanto la distancia sea máxima o mínima, "θ2" debe ser tal que:
tg θ2 =θ−−θ−
θ−−θ+22023303
22023303
cosRXcosR2/1XsinRZsinRZ =
XXZZ
1213
1213
−−
(VI-22)
Esta ecuación representa, ver figura VI-5, que para un determinado
ángulo "θ3" y, por lo tanto, una determinada posición del punto del "13", para que la distancia entre los puntos "12" y "13" sea máxima o mínima, la manivela "2" deberá estar contenida en el plano formado por el eje del actuador "2" y el punto "13". Dicho de otra forma, el eje del actuador "2", el punto "12" y el punto "13" deberán estar contenidos en un mismo plano.
Fig. VI-5 Distancias mínima y máxima entre los puntos "12" y "13" para un determinado punto "13"

Comprobación del giro de manivelas
144
Derivando la ecuación (VI-19) respecto de "θ3" e igualando a cero
δθδ
3
2D = 2 (X03 � 1/2 R3 cos θ3 - X02 - R2 cos θ2) 1/2 R3 sin θ3 +
+ 2 (Y03 � 3 /2 R3 cos θ3 - Y02) 3 /2 R3 sin θ3 + + 2 (Z03 + R3 sin θ3 - Z02 - R2 sin θ2) R3 cos θ3 = 0 (VI-23)
Simplificando
(1/2 (X03 � 1/2 R3 cos θ3 - X02 - R2 cos θ2) + + 3 /2 (Y03 � 3 /2 R3 cos θ3 - Y02)) sin θ3 + + (Z03 + R3 sin θ3 - Z02 - R2 sin θ2) cos θ3 = 0 (VI-24)
Poniendo esta ecuación en función de las coordenadas de los puntos
"12" y "13", ecuaciones (VI-13) a (VI-18), resulta:
(1/2 (X13 � X12) + 3 /2 (Y13 Y12)) sin θ3 + (Z13 � Z12) cos θ3 = 0 (VI-25) Dividiendo por "cos θ3"resulta que, para que la derivada sea cero y por
lo tanto la distancia sea máxima o mínima, "θ3" debe ser tal que:
tg θ3 = )YY(2/3)XX(2/1
ZZ12131213
1312
−+−−
(VI-26)
De forma análoga al caso anterior, de esta expresión se deduce que para un determinado ángulo "θ2" y, por lo tanto, un determinado punto "12", la manivela "3" debe estar contenida en un plano formado por el eje del actuador "3" y el punto "12". Dicho de otra forma, el eje del actuador "3", el punto "12" y el punto "13" deberán estar contenidos en el mismo plano (Fig. VI-6).

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
145
Fig. VI-6 Distancias mínima y máxima entre los puntos "12" y "13" para un
determinado punto "12" En un manipulador paralelo, con una geometría como la que se está
considerando, donde "Z03" = "Z02", para que se cumplan las ecuaciones (VI-22) y (VI-26), se deberá dar, por la primera, que el eje del actuador "2", el punto "12" y el punto "13" estén en un plano y, por la segunda, que el eje del actuador "3" y los puntos "12" y "13" estén en otro plano.
Para que ambas condiciones se cumplan a la vez, los ejes de los actuadores "2" y "3" y los puntos "12" y "13" deberán estar contenidos todos en un mismo plano, que será el plano de los ejes de los actuadores. Si sucede esto, los ángulos de las manivelas "θ2" y "θ3" serán iguales a 0º ó a 180º.
Con los ángulos de las manivelas "θ2" y "θ3" y los valores de 0º y 180º
se tendrá cuatro combinaciones donde las distancias serán máximas o mínimas (Fig. VI-7), estas serán: - Una distancia máxima entre "12" y "13" (Dmax) cuando θ2 = θ3 = 180º. - Una distancia mínima entre "12" y "13" (Dmin) cuando θ2 = θ3 = 0º. - Una distancia máxima o mínima relativa entre "12" y "13" (Dm1) cuando
θ2 =0º y θ3 = 180º. - Una distancia máxima o mínima relativa entre "12" y "13" (Dm2) cuando
θ2 =180º y θ3 = 0º.

Comprobación del giro de manivelas
146
- Fig. 43 Distancias máxima, mínima y distancias extremas intermedias.
En la figura VI-8 se representan las curvas de equidistancia y las posiciones donde las distancias entre los puntos "12" y "13" son máxima, mínima o extremas intermedias, en función de los ángulos de las manivelas "θ2" y "θ3".
Fig. VI-8 Distancias máxima, mínima y extremas intermedias en función de los
ángulos de las manivelas "2" y "3"

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
147
Con la geometría propuesta para este manipulador, expuesta al inicio del apartado VI.3.1, las cuatro distancias definidas entre los puntos "12" y "13" pueden expresarse:
Dmax = )R2/3YY()R2/1RXX( 302032
3202032 +−+++− (VI-27)
Dmin = )R2/3YY()R2/1RXX( 302032
3202032 +−+−−− (VI-28)
Dm1 = )R2/3YY()R2/1RXX( 302032
3202032 +−++−− (VI-29)
Dm2 = )R2/3YY()R2/1RXX( 302032
3202032 −−+−+− (VI-30)
Una vez determinadas las distancias máxima, mínima y máximas o
mínimas intermedias podrán tener lugar, entre otras, las siguientes posibilidades:
- Si L2 + L3 > Dmín y LL 32 − < Dmax, las bielas "2" y "3" se podrán
ensamblar. - Si L2 + L3 > Dm2 y LL 32 − < Dm1, la manivela "2" podrá dar vueltas
completas, si la manivela "3" está en una posición conveniente. - Si L2 + L3 > Dm1 y LL 32 − < Dm2, la manivela "3" podrá dar vueltas
completas, si la manivela "2" está en una posición conveniente. - Si L2 + L3 > Dmax y LL 32 − < Dmin, las manivelas "2" y "3" podrán dar
vueltas completas. De estas cuatro condiciones, como en este capítulo se está estudiando
un método para comprobar que todas las manivelas puedan dar vueltas completas, las realmente importantes serán:
- La primera, que garantiza que las dos bielas correspondientes a un vértice
de la plataforma móvil se podrán ensamblar entre ellas en dicho vértice. - La cuarta, que garantiza que cada manivela pueda dar vueltas completas
independientemente de la posición de las otras.

Comprobación del giro de manivelas
148
VI.3.2.2 - Comprobación de la longitud de las bielas "4" y "5"
En este subapartado, se comprobará las dimensiones que deben tener las bielas "4" y "5" para que se puedan conectar entre ellas y permitan que las manivelas correspondientes puedan girar completamente.
Fig. VI-9 Distancias máxima y mínima entre los puntos �14� y �15�
Siguiendo para las bielas y manivelas "4" y "5", (Fig. VI-9), un razonamiento similar al establecido en el apartado anterior, se llegara a la conclusión de que: - Para que las bielas "4" y "5" se puedan ensamblar entre ellas, se deberá
cumplir que: - L4 + L5 > Dmin entre los puntos "14" y "15". - LL 54 − < Dmax entre los puntos "14" y "15".
- Para que las manivelas "4" y "5" puedan girar vueltas completas, se deberá cumplir que: - L4 + L5 > Dmax entre los puntos "14" y "15". - LL 54 − < Dmin entre los puntos "14" y "15".
siendo:
Dmax = )R2/3R2/3YY()R2/1R2/1XX( 450405
2450405
2 −−−+−+− (VI-31) Dmin = )R2/3R2/3YY()R2/1R2/1XX( 450405
2450405
2 ++−++−− (VI-32)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
149
VI.3.2.3 - Comprobación de la longitud de las bielas "6" y "1"
En este subapartado, se comprobará las dimensiones que deben tener las bielas "6" y "1" para que se puedan conectar entre ellas y permitan que las manivelas correspondientes puedan girar completamente.
Fig. VI-10 Distancias máxima y mínima entre los puntos "11" y "16"
Siguiendo el mismo razonamiento de los apartados anteriores, para las manivelas "1" y "6" (Fig. VI-10), se tendrá:
- Para que las bielas "6" y "1" se puedan ensamblar entre ellas, se deberá
cumplir que: - L1 + L6 > Dmin entre los puntos "11" y "16". - LL 61 − < Dmax entre los puntos "11" y "16".
- Para que las manivelas "6" y "1" puedan girar vueltas completas, se deberá cumplir que: - L1 + L6 > Dmax entre los puntos "11" y "16". - LL 61 − < Dmin entre los puntos "11" y "16".
siendo:
Dmax = )R2/3YY()R2/1RXX( 601062
6101062 −−+++− (VI-33)
Dmin = )R2/3YY()R2/1RXX( 601062
6101062 +−+−−− (VI-34)

Comprobación del giro de manivelas
150
VI.3.2.4 - Conclusiones sobre las longitudes de las bielas Al calcular las distancias máximas y mínimas entre los extremos de
manivelas cuyas bielas correspondientes van unidas a un vértice de la plataforma móvil, se observa que estas distancias se producen en puntos de "insensitividad de distancia" respecto de los ángulos de las manivelas, ya que sus derivadas respecto de dichos ángulos deben ser cero en los máximos y mínimos.
Como resumen de este apartado se puede afirmar que:
- Para que dos bielas contiguas se puedan ensamblar en un vértice de la plataforma móvil, se debe cumplir que: - La suma de las longitudes de esas bielas sea mayor que la distancia
mínima entre los puntos extremos de las manivelas a las que van acopladas.
- El módulo de la diferencia de las longitudes de las bielas sea menor
que la distancia máxima entre los extremos de las manivelas.
- Para que dos bielas contiguas se ensamblen en un vértice de la plataforma móvil y permitan, en cualquier posición, que sus dos manivelas correspondientes den vueltas completas se debe cumplir que:
- La suma de las longitudes de las dos bielas sea mayor que la distancia
máxima entre los puntos extremos de las manivelas.
- El módulo de la diferencia de longitudes de las bielas sea menor que la distancia mínima entre los extremos de las manivelas correspondientes.
Por ejemplo, para un manipulador en que el lado del triángulo
equilátero formado por los ejes de los actuadores sea de 1 metro y el descentramiento de los actuadores de 0.05 metros, para unas longitudes de manivelas iguales a 0.1 metros, las bielas, si son iguales, deberán tener unas longitudes mayores de 0.3116 metros.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
151
VI.3.3 - Dimensiones de las aristas de la plataforma móvil
En los apartados anteriores se ha estudiado la influencia de las longitudes de las bielas para permitir su ensamble y que sus manivelas correspondientes puedan dar vueltas completas. En este apartado se tratará la influencia de las dimensiones de la plataforma móvil, (Fig. VI-11), comprobando si:
- La arista "A12" de la plataforma móvil es capaz de ensamblar los puntos
"123" y "161". - La arista "A34" es capaz de ensamblar los puntos "123" y "145". - La arista "A56" es capaz de unir los puntos "145" y "161".
Permitiendo en todo momento que todas las manivelas puedan girar
vueltas completas.
Fig. VI-11 Nomenclatura del Manipulador Paralelo 6-RKS de Hunt

Comprobación del giro de manivelas
152
VI.3.3.1 - Comprobación de la longitud de la arista "A12"
En este subapartado se tratará de determinar las dimensiones de la arista "A12" de la plataforma móvil para que sea capaz de ensamblar los puntos "123" y "161", permitiendo el giro completo de las manivelas "1", "2", "3" y "6".
Para unas posiciones determinadas de los puntos "12" y "13", el punto
"123" se hallará sobre una circunferencia cuyo eje de revolución será la recta que pasa por los puntos "12" y "13".
De forma similar, para unas posiciones determinadas de los puntos
"11" y "16", el punto "161" se hallará sobre una circunferencia cuyo eje de revolución será la recta que pasa por los puntos "11" y "16".
Para que la arista "A12" de la plataforma móvil sea capaz de ensamblar
los puntos "123" y "161", para una posición determinada de las manivelas "1", "2", "3" y "6", sin tener en cuenta si las manivelas pueden girar, se deberá cumplir que la longitud de la arista sea: - Mayor que la distancia mínima entre los puntos a unir, (A12 > D123-161 min). - Menor que la distancia máxima entre los puntos a unir, (A12 < D123-161 max).
Al ir girando las 4 manivelas, los puntos "11", "12", "13" y "16" van
variando de posición. Por lo tanto, irán variando las distancias máxima y mínima entre los puntos "123" y "161" y apareciendo más posibilidades que se analizan a continuación:
- Para que la arista "A12" sea capaz de ensamblar los puntos "123" y "161",
aunque las manivelas no giren 360º, se deberá cumplir que la longitud de la arista sea: - Mayor que el mínimo de la distancia mínima entre los puntos "123" y
"161", (A12 > (D123-161 min) min). - Menor que el máximo de la distancia máxima entre dichos puntos,
( A12 < (D123-161 max) max).
- Para que las cuatro manivelas sean capaces de girar vueltas completas y en todo momento la arista "A12" llegue a ensamblar los puntos "123" y "161" se deberá cumplir que la longitud de la arista sea: - Mayor que el máximo de las distancias mínimas entre los puntos
"123" y "161", (A12 > (D123-161 min) max). - Menor que el mínimo de las distancias máximas entre dichos puntos,
(A12 < (D123-161 max) min).

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
153
VI.3.3.2 - Distancias de los puntos "123" y "161" analíticamente En el proceso de determinación de las distancias máxima y mínima
entre los puntos "123" y "161", con unas posiciones determinadas de los puntos "11", "12", "13" y "16", para el punto "123" se pueden plantear las ecuaciones de restricción siguientes: (X123 - X12)2 + (Y123 - Y12)2 + (Z123 - Z12)2 - L2
2 = 0 (VI-35) (X123 - X13)2 + (Y123 - Y13)2 + (Z123 - Z13)2 - L2
3 = 0 (VI-36)
Éstas son las ecuaciones de dos superficies esféricas, con centros en los puntos "12" y "13", cuya intersección será una circunferencia, contenida en un plano perpendicular a la recta que pasa por dichos puntos, sobre la que se encontrará el punto "123".
Despejando "X123" en la ecuación (VI-35) se tiene
X123 = X12 ± ZYZYZZ2YY2L 2123
2123
212
2121212312123
22 −−−−++ (VI-37)
Sustituyendo este valor en la ecuación (VI-36) y despejando "Y123" se obtiene
Y123 = ±−+−
−+−))XX()YY((2)XX(Y2a)YY(
13122
13122
13122
121213
))XX()YY((2
)b4a)()YY()XX(())XX(Y2a)YY((
13122
13122
21312
21312
21312
2121312
2
−+−
+−+−−−−− (VI-38)
siendo:
a = XX2ZZ2ZZ2LZYXZYXL 1213131231212323
213
213
213
212
212
212
22 −−+−+++−−+ (VI-39)
b = )ZZ2LZZY·()XX( 12123
22123
212
2121312
2 −−++− (VI-40)

Comprobación del giro de manivelas
154
Comenzando ahora por despejar "Y123" de la ecuación (VI-35) se tiene
Y123 = Y12 ± ZXZXZZ2XX2L 2123
2123
212
2121212312123
22 −−−−++ (VI-41)
Sustituyendo este valor en la ecuación (VI-36) y despejando después "X123" se obtiene
X123 = ±−+−
−+−))XX()YY((2)YY(X2c)XX(
13122
13122
13122
121213
))XX()YY((2
)d4c)()XX()YY(())YY(X2c)XX((
13122
13122
21312
21312
21312
2121312
2
−+−
+−+−−−−− (VI-42)
siendo:
c = YY2ZZ2ZZ2LZYXZXYL 1213131231212323
213
213
213
212
212
212
22 −−+−+++−−+ (VI-43)
d = )ZZ2LZZX()YY( 12123
22
2123
212
2121312
2 −−++− (VI-44)
Con las ecuaciones (VI-38) y (VI-42) se obtiene las coordenadas "X" e "Y" del punto "123" en función de las coordenadas de los puntos "12" y "13", de las longitudes de las bielas "2" y "3" y de la coordenada "Z" del punto "123".
Siguiendo el mismo proceso que para el punto "123", para determinar
la posición del punto "161" se pueden plantear las siguientes condiciones de restricción:
(X161 - X11)2 + (Y161 - Y11)2 + (Z161 - Z11)2 - L2
1 = 0 (VI-45) (X161 - X16)2 + (Y161 - Y16)2 + (Z161 - Z16)2 - L2
6 = 0 (VI-46)
Que son las ecuaciones de dos superficies esféricas con centros en los puntos "11" y "16" cuya intersección será la circunferencia donde se deberá encontrar el punto "161".

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
155
Operando de forma similar a lo realizado anteriormente, para el punto "161" se obtendrá:
Y161 = ±−+−
−+−))XX()YY((2)XX(Y2e)YY(
16112
16112
16112
111116
))XX()YY((2
)f4e)()YY()XX(())XX(Y2e)YY((
16112
16112
21611
21611
21611
2111611
2
−+−
+−+−−−−− (VI-47)
siendo:
e = XX2ZZ2ZZ2LZYXZYXL 11161616111161
26
216
216
216
211
211
211
21 −−+−+++−−+ (VI-48)
f = )ZZ2LZZY()XX( 11161
21
2161
211
2111611
2 −−++− (VI-49)
De forma similar, para "X161" se obtendrá
X161 = ±−+−
−+−))XX()YY((2)YY(X2g)XX(
16112
16112
16112
111116
))XX()YY((2
)h4g)()XX()YY(())YY(X2g)XX((
16112
16112
21611
21611
21611
2111611
2
−+−
+−+−−−−− (VI-50)
siendo:
g = YY2ZZ2ZZ2LZYXZXYL 111611616111161
26
216
216
216
211
211
211
21 −−+−+++−−+ (VI-51)
h = )ZZ2LZZX()YY( 11161
21
2161
211
2111611
2 −−++− (VI-52)
Con las ecuaciones (VI-47) y (VI-50) se obtienen las coordenadas "X" e "Y" del punto "161" en función de las coordenadas de los puntos "11" y "16", de las longitudes de las bielas "1" y "6" y de la coordenada "Z" del punto "161".
Una vez determinadas las coordenadas de los puntos "123" y "161", ecuaciones (VI-38), (VI-42), (VI-47) y (VI-50), la distancia entre dichos puntos al cuadrado será:
(D123-161)2 = (X123 � X161)2 + (Y123 � Y161)2 + (Z123 � Z161)2 (VI-53)

Comprobación del giro de manivelas
156
En este punto, se debería:
- Sustituir "X123", "X161", "Y123" e "Y161" por las expresiones deducidas anteriormente, teniendo en cuenta que cada coordenada puede tener dos valores.
- Comprobar para los puntos "123" y "161", cual de los dos valores de la coordenada "Y" se corresponde con cada uno de los valores de la coordenada "X".
- Obtener cuatro ecuaciones diferentes para las distancias una vez sustituidas las expresiones correspondientes.
- Derivar las 4 ecuaciones de la distancia respecto de "Z123" y de "Z161", igualar a cero ambas derivadas parciales de cada ecuación y determinar para que coordenadas "Z123" y "Z161" la distancia entre los puntos "123" y "161" es máxima y mínima.
- Una vez determinadas las coordenadas "Z" de los dos puntos, calcular sus correspondientes coordenadas "X" e "Y".
- Finalmente, determinar las distancias máximas y mínimas, absolutas y relativas, entre los puntos "123" y "161".
Teniendo en cuenta que el proceso expuesto en el párrafo anterior se
realizaría para unas posiciones fijas de los puntos "11", "12", "13" y "16", ahora, habría que derivar las expresiones de las distancias extremas respecto de los ángulos de las cuatro manivelas para hallar los máximos y mínimos de las distancias extremas al ir girando las manivelas, lo que resultaría a todas luces poco operativo.
El proceso expuesto en los párrafos anteriores se ha intentado
implementar por medio de programas como Matlab y Mathematica, resultando que estos programas son incapaces de resolver el problema.
Por todo ello, y como conclusión de este subapartado, se puede llegar
a afirmar que el tratamiento analítico de las distancias máximas y mínimas entre los dos puntos de unión de cuatro bielas correspondientes a dos vértices de la plataforma móvil, resulta extremadamente complicado. Esto es debido a que el lugar geométrico donde se puede encontrar cada uno de los dos puntos, cuyas distancias máximas y mínimas se pretende determinar, es la intersección de dos superficies toroidales. En la superficie de cada toro, para unas determinadas coordenadas "X" e "Y", la coordenada "Z" puede tomar cuatro valores diferentes, resultando que el número de combinaciones de posibles soluciones es muy grande, perdiéndose el concepto físico de las mismas.
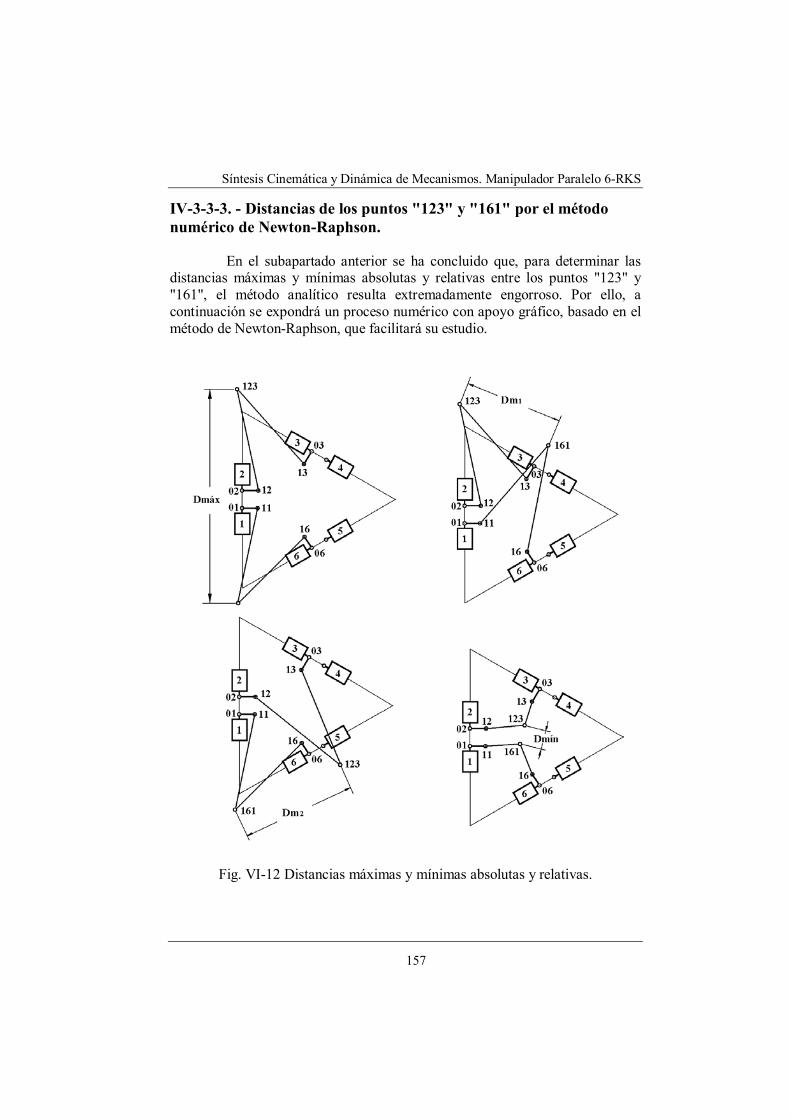
Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
157
IV-3-3-3. - Distancias de los puntos "123" y "161" por el método numérico de Newton-Raphson.
En el subapartado anterior se ha concluido que, para determinar las distancias máximas y mínimas absolutas y relativas entre los puntos "123" y "161", el método analítico resulta extremadamente engorroso. Por ello, a continuación se expondrá un proceso numérico con apoyo gráfico, basado en el método de Newton-Raphson, que facilitará su estudio.
Fig. VI-12 Distancias máximas y mínimas absolutas y relativas.

Comprobación del giro de manivelas
158
Para simplificar la nomenclatura (Fig. VI-12) las distancias extremas entre los puntos "123" y "161" se denominarán de la forma siguiente: - Distancia máxima absoluta (Dmáx). - Distancia mínima absoluta (Dmín). - Distancia máxima o mínima intermedia "1", (Dm1). - Distancia máxima o mínima intermedia "2", (Dm2).
Teóricamente pueden existir más distancias extremas intermedias, por
ejemplo, cuando las bielas "2" y "3" están cruzadas con las bielas "1" y "6" o cuando las bielas "2" y "3" están sobre la plataforma fija y las bielas "1" y "6" por debajo. Como estas posibilidades no tienen utilidad en un manipulador real, no se considerarán.
En el subapartado (VI.3.2.1), cuando se estudiaron analíticamente las
distancias (Dmáx), (Dmín), (Dm1) y (Dm2) entre los puntos "12" y "13", se llegó a la conclusión de que, para un determinado punto "12", la distancias extremas se producían cuando el punto "13" estaba en una posición tal que el eje del actuador "3", el punto "13" y el punto "12" estaban en el mismo plano; y para un determinado punto "13", la distancias extremas se producían cuando el punto "12" estaba en una posición tal que el eje del actuador "2", el punto "12" y el punto "13" estaban en un mismo plano.
Fig. VI-13 Posición de los puntos "123" y "161" con distancias máximas y
mínimas entre ellos

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
159
Por analogía con este caso, ahora se afirma que, para unos determinados puntos "12", "13" y "161", la distancia entre los puntos "123" y "161" será máxima o mínima cuando el punto "123" sea tal que los puntos "12", "13", "123" y "161" estén contenidos en el mismo plano (Fig. VI-13).
Para demostrar la afirmación del párrafo anterior se tiene que, para
unos determinados puntos "12", "13" y "161", el punto "123" puede describir una circunferencia contenida en un plano perpendicular a la recta que une los puntos "12" y 13". Si se hace girar a este plano alrededor de su eje arrastrando al punto "123" a lo largo de la circunferencia y se va proyectando continuamente el punto "161" sobre el plano giratorio se tendrá que las proyecciones del punto forman otra circunferencia concéntrica con la anterior. En la figura (VI-14), se puede observar que las distancias extremas se darán cuando la proyección del punto "161" y el punto "123" estén sobre el mismo diámetro de las circunferencias. Como la recta proyectante del punto 161 y el eje de giro que une los puntos "12" y "13" son paralelos queda demostrado geométricamente que los puntos "12", "13", "123" y "161" se encuentran en el mismo plano cuando la distancia entre un determinado punto "161" y el punto "123" es máxima o mínima.
Fig. VI-14 Distancias máxima y mínima entre los vértices "123" y "161" para
unos puntos "12", "13" y "161" dados

Comprobación del giro de manivelas
160
Haciendo el mismo razonamiento para unos determinados puntos "11", "16" y "123", la distancia entre los vértices "123" y "161" será máxima o mínima cuando los puntos "11", "16", "161" y "123" se encuentren en el mismo plano.
Juntando las dos condiciones anteriores se tendrá que, la distancia
entre los puntos "123" y "161" será máxima o mínima cuando por un lado los puntos "12", "13", "123" y "161" estén en un plano, y por otro lado los puntos "11", "16", "123" y "161" estén contenidos en otro plano. Es decir, los puntos "123" y "161" estarán contenidos en la recta intersección de dos planos: uno que contiene a los puntos "12" y "13" y otro que contiene a los puntos "11" y "16" (Fig. VI-15).
Fig.VI-15 Intersección del plano formado por los puntos "12", "13" y "123" y el
formado por los puntos "11", "16" y "161" Al combinar las distancias máximas y mínimas de las dos condiciones
anteriores aparecerán las distancias extremas siguientes: Dmáx, Dmín, Dm1, Dm2 y, si las bielas correspondientes a los actuadores "2" y "3" se cruzan con las bielas correspondientes a los actuadores "1" y "3" se tendrá una distancia extrema de bielas cruzadas (Dmc), que no tiene utilidad en el manipulador.
En este punto se puede observar que la distancia entre los puntos
"123" y "161" presenta una insensitividad con respecto a pequeños giros de los puntos "123" y "161" alrededor de los ejes que pasan por los puntos "12" y "13" y por los puntos "11" y "16" respectivamente.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
161
Al ir girando las manivelas "1", "2", "3" y "6", las distancias máxima y mínima entre los puntos "123" y "161" irán variando y se producirá que las distancias máxima y mínima tendrán sus máximos y mínimos respectivos.
Para que las cuatro manivelas puedan dar vueltas completas, con la
arista "A12" acoplada, se deberá cumplir que: - (Dmáx)mín entre los puntos "123" y "161" > "A12". - (Dmín)máx entre los puntos "123" y "161" < "A12".
Para determinar el mínimo de la distancia máxima y el máximo de la
distancia mínima, apoyándose en un método geométrico, se inicia observando que el extremo de cada biela se puede mover en el interior de un volumen toroidal, (Fig.VI-16), cuyo eje será el eje del actuador correspondiente. La sección del toro será una circunferencia cuyo radio será la longitud de la biela y el centro de esta sección será la circunferencia descrita por el extremo de la manivela. Para un punto determinado del extremo de la manivela, el extremo de la biela estará en una superficie esférica que será tangente a la superficie toroidal. Esta tangencia se producirá cuando la biela esté contenida en un plano perpendicular a la circunferencia descrita por el extremo de la manivela, por lo tanto, cuando la biela, la manivela y el eje del actuador estén comprendidos en el mismo plano. O sea que el extremo de la biela alcanzará las posiciones extremas, estará sobre la superficie toroidal, cuando el eje del actuador, la manivela y la biela estén contenidas en el mismo plano.
Fig. VI-16 Lugar geométrico del extremo de una biela.

Comprobación del giro de manivelas
162
Tomando, por ejemplo el punto "123", como este punto es el extremo de las bielas "2" y "3", deberá estar en el interior de dos toros cuyos ejes serán: el eje del actuador "2" y el eje del actuador "3". Por lo tanto, el punto "123" estará en el interior de un volumen que será la intersección de estos dos toros, y para simplificar su denominación, debido a su forma, se le llamará "BANANA" (Fig. VI-17)
Fig. VI-17 Banana, lugar geométrico de un extremo de la plataforma móvil
La sección aproximadamente normal de esta "banana" será un polígono de cuatro lados en el que los lados serán arcos de circunferencia de las superficies de los toros (Fig. VI-18).
Fig. VI-18 Polígono sección de la banana

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
163
Al ir girando las manivelas "2" y "3", si el punto "123" se encuentra en esta sección, se moverá por ella y alcanzará sus posiciones extremas sobre los arcos del polígono cuando alguna de las cadenas cinemáticas eje del actuador, manivela y biela estén en el mismo plano, es decir, se encuentre en posición de insensitividad (PI).
Las condiciones, que una cadena cinemática se encuentre en PI o que el extremo de la biela se encuentre sobre la superficie toroidal, son equivalentes.
El punto "123" se encontrará en uno de los cuatro vértices del polígono sección de la banana cuando: - El eje del actuador "2", la manivela "2" y la biela "2" estén en un plano. - El eje del actuador "3", la manivela "3" y la biela "3" estén en un plano.
Todo lo dicho para el punto "123" es aplicable para el punto "161", el cual se encontrará en el interior de la "banana" correspondiente a los actuadores "1" y "6".
El punto "161" se encontrará en uno de los cuatro vértices de su polígono respectivo cuando: - El eje del actuador "1", la manivela "1" y la biela "1" estén en un plano. - El eje del actuador "6", la manivela "6" y la biela "6" estén en un plano.
Cuando el manipulador se encuentre en alguna configuración de insensitividad de posición (CIP), los puntos "123" y "161" se encontrarán en alguno de los cuatro vértices de los polígonos respectivos, ya que todas las cadenas cinemáticas de unión de las plataformas se encontrarán en posición de insensitividad (PI).
Fig. VI-19 Zonas de distancias extremas entre los puntos "123" y "161"

Comprobación del giro de manivelas
164
Teniendo en cuenta la forma de los polígonos secciones de las bananas en los que se pueden encontrar los puntos "123" y "161", parece lógico suponer que los máximos y los mínimos de las distancias máxima y mínima se producirán cuando los puntos "123" y "161" se encuentren en algún vértice de su polígono correspondiente y estos polígonos se encuentren lo más alejados o lo más próximos posible (Fig. VI-19).
Las condiciones del párrafo anterior se pueden expresar como:
- Los puntos "12", "13", "123" y "161" estarán en el mismo plano. - Los puntos "11", "16", "123" y "161" estarán en el mismo plano. - Cada una de las cadenas cinemáticas correspondientes a los actuadores "1",
"2", "3" y "6" estará contenida en un plano.
Las dos primeras condiciones imponen que las distancias entre los puntos "123" y "161" sean extremas para unas posiciones determinadas de las manivelas, y la tercera impone que estas distancias extremas sean máximas o mínimas al variar los ángulos de las manivelas.
En este subapartado, tal como se indicó anteriormente, solo interesará
la mínima de las distancias máximas y la máxima de las distancias mínimas, para comprobar que la longitud del lado correspondiente de la plataforma móvil se encuentra entre ellas y de ese modo se pueda ensamblar permitiendo el giro de todas las manivelas.
Fig. VI-20 (Dmáx)mín y (Dmín)máx entre vértices de polígonos curvos.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
165
En la figura VI-20, que representa dos secciones de la figura VI-19 donde se encuentrarán las distancias máximas y mínimas. Se comprueba gráficamente que en ambos casos, las (Dmáx)mín y (Dmín)máx se producen entre vértices de los polígonos secciones de las bananas, lo que confirma la suposición inicial de que estas distancias se producirían estando las cuatro cadenas cinemáticas en posición de insensitividad.
Para determinar las posiciones de los puntos "123" y "161" para los
cuales las distancias entre ellos serán extremas, se utilizará el método iterativo de Newton-Raphson, por medio un programa realizado en MATLAB.
Suponiendo que los ejes de los actuadores forman un triángulo
equilátero, para simplificar las expresiones sin perder generalidad, las condiciones de restricción serán las siguientes:
- Para que las cadenas cinemáticas "1", "2", "3" y "6" se encuentren en
posición de insensitividad, en cada cadena, el producto mixto de los vectores en la dirección del eje del actuador, de la manivela y de la biela debe ser cero:
(X123 - X12)·(Z12 - Z02) - (X12 � X02)·(Z123 � Z12) = 0 (VI-54)
3 (Y13 � Y03)(Z123 � Z13) - 3 (Y123 � Y13)(Z13 � Z03) + (X13 � X03)(Z123 � Z13) - (X123 � X13)(Z13 � Z03) = 0 (VI-55)
3 (Y16 � Y06)(Z161 � Z16) - 3 (Y161 � Y16)(Z16 � Z06) - (X16 � X06)(Z161 � Z16) + (X161 � X16)(Z16 � Z06) = 0 (VI-56) (X161 - X11)(Z11 - Z01) - (X11 � X01)(Z161 � Z11) = 0 (VI-57)
- Para que el punto "161" se encuentre en el plano formado por los puntos "12", "13" y "123", el producto mixto de los vectores de dirección del punto "12" al "13", del "12" al "123" y del "12" al "161" debe ser cero.
(X13 - X12)[(Y123 - Y12)(Z161 � Z12) - (Y161 � Y12)(Z123 � Z12)]+ (Y13 - Y12)[(X161 - X12)(Z123 � Z12) - (X123 � X12)(Z161 � Z12)]+ (VI-58) (Z13 - Z12)[(X123 - X12)(Y161 � Y12) - (X161 � X12)(Y123 � Y12)] = 0

Comprobación del giro de manivelas
166
- Para que el punto "123" se encuentre en el plano formado por los puntos "11", "16" y "161", el producto mixto de los vectores de dirección del punto 11 al 16, del "11" al "161" y del "11" al "123" debe ser cero.
(X16 - X11)[(Y123 - Y11)(Z161 � Z11) - (Y161 � Y11)(Z123 � Z11)]+ (Y16 - Y11)[(X161 - X11)(Z123 � Z11) - (X123 � X11)(Z161 � Z11)]+ (VI-59) (Z16 - Z11)[(X123 - X11)(Y161 � Y11) - (X161 � X11)(Y123 � Y11)] = 0
- Para indicar la longitud constante de las manivelas:
(X12 � X02)2 + Z2
12 - R22 = 0 (VI-60)
(X13 � X03)2 + (Y13 � Y03)2 + Z2
13 - R23 = 0 (VI-61)
(X16 � X06)2 + (Y16 � Y06)2 + Z2
16 - R26 = 0 (VI-62)
(X11 � X01)2 + Z2
11 - R21 = 0 (VI-63)
- Para indicar que los extremos de las manivelas giran en unos planos
perpendiculares a los ejes de los actuadores, el producto escalar de los vectores en la dirección del eje del actuador y de la manivela debe ser cero:
Y12 � Y02 = 0 (VI-64)
3 (X13 � X03) � (Y13 � Y03) = 0 (VI-65)
3 (X16 � X06) + (Y16 � Y06) = 0 (VI-66) Y11 � Y01 = 0 (VI-67)
- Para indicar las longitudes constantes de las bielas:
(X123 - X12)2 + (Y123 - Y12)2 + (Z123 - Z12)2 - L2
2 = 0 (VI-68) (X123 - X13)2 + (Y123 - Y13)2 + (Z123 - Z13)2 - L2
3 = 0 (VI-69) (X161 - X16)2 + (Y161 - Y16)2 + (Z161 - Z16)2 - L2
6 = 0 (VI-70)
(X161 - X11)2 + (Y161 - Y11)2 + (Z161 - Z11)2 - L21 = 0 (VI-71)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
167
Las condiciones de restricción (VI-54) a (VI-71) forman un sistema de 18 ecuaciones, donde las longitudes de las manivelas y las bielas "2", "3", "6" y "1" y las posiciones de los puntos "02", "03", "06" y "01" serán datos, y las 18 incógnitas serán las coordenadas de los puntos "12", "13", "16", "11", "123" y "161". Este sistema se resolverá por el método iterativo de Newton-Raphson partiendo de unas coordenadas aproximadas de los puntos "12", "13", "16", "11", "123" y "161" para iniciar la primera iteración.
Por ejemplo, tomando un manipulador en el que los ejes de los actuadores formen un triángulo equilátero de 1 metro de lado, con un descentramiento de los actuadores de 0.05 metros, unas longitudes de las cuatro manivelas de 0.1 metros y unas longitudes de las cuatro bielas de 0.6 metros, resulta que la distancia mínima de las máximas es 1.22807 metros y la máxima de las mínimas es 0.2226 metros. Entre estas dos dimensiones deberá estar comprendida la longitud de la arista de la plataforma móvil para que se pueda ensamblar y permita el giro completo de las cuatro manivelas.
Al resolver el sistema de 18 ecuaciones de restricción por el método
de Newton-Raphson, la solución converge, en principio, a cualquiera de las soluciones posibles. Por ejemplo, en la zona de distancias mínimas, converge a cualquiera de las dieciséis combinaciones de distancia entre los vértices de los dos polígonos sección de las bananas, y lo mismo ocurre en la zona de distancias máximas y distancias extremas intermedias. El converger a una solución u otra dependerá de las coordenadas iniciales que se introduzcan para iniciar la primera iteración.
En el programa realizado con Matlab, para poder analizar todas las distancias, se sigue un proceso de paso de un vértice a otro del polígono sección de la banana haciendo girar las manivelas de una posición de insensitividad a otra, similar al seguido en el Capítulo IV para la determinación de las CIP.
Como conclusión de este subapartado se puede expresar que los
máximos y mínimos de las distancias extremas (Dmáx, Dmín, Dm1, Dm2 y Dmc) se producirán cuando: - Las cuatro cadenas cinemáticas actuador-manivela-biela estén en PI. - El punto "123" se encuentre el plano formado por las bielas "1" y "6". - El punto "161" se encuentre el plano formado por las bielas "2" y "3".
Las soluciones de las condiciones anteriores son numerosas, lo que
obliga a tener que analizarlas todas. En estas posiciones se produce insensitividad de los máximos y mínimos de las distancias extremas respecto de los giros de las manivelas y, de los giros de las bielas alrededor de los extremos de las manivelas.

Comprobación del giro de manivelas
168
IV.3.3.4 - Distancias de los puntos "123" y "161" gráficamente
En el subapartado anterior se ha expuesto que los máximos y mínimos de las distancias extremas son numerosos y que el método iterativo de Newton-Raphson puede converger a cualquiera de ellos dependiendo de las coordenadas con las que se inicie cada iteración. Por ello, en este subapartado se expondrá un método gráfico con el fin de lograr unos valores iniciales de las coordenadas próximas a la solución deseada, y así garantizar la convergencia a ella.
También se utilizará el programa CATIA para representar las bananas
y poder determinar gráficamente el mínimo de la distancia máxima y el máximo de la distancia mínima entre los puntos "123" y "161" que son los valores que realmente son interesantes.
Fig. VI-21 Determinación de las aristas de las bananas por puntos

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
169
En la figura VI-21 se expone un método para localizar las líneas intersección de las superficies toroidales, es decir, las aristas de las bananas entre las que se producirán los máximos y mínimos de las distancias extremas.
Se trazan las secciones de los toros correspondientes a los actuadores "2" y "3" sobre el plano formado por los ejes de los actuadores. Haciendo centro en el vértice "A", punto de corte de los ejes de los actuadores cuya banana se pretende determinar, se traza el arco "JDEI". Al girar las secciones anteriores alrededor de sus respectivos ejes se generarán los toros y, debido a que están sobre las superficies exteriores de los toros y equidistantes del punto "A", los puntos "D" y "E" trazarán unas trayectorias que se cortarán en la arista superior de la banana. La proyección del punto de corte sobre el plano de los ejes de los actuadores será "F". Siguiendo el mismo procedimiento se encontrarán los puntos "K", "M" y "L" como proyecciones de las intersecciones en las aristas laterales e inferior de la banana de las trayectorias de los puntos "J", "I", "D" y "E" pertenecientes a las superficies exterior e interior de los toros. Por abatimiento de un plano perpendicular al eje del actuador "2", se determinará la cota "Z" de una de las intersecciones anteriores.
EL método expuesto en párrafo anterior resulta muy laborioso, ya que se determinan las aristas de las bananas por puntos, y son necesarios muchos puntos para poder analizar las zonas donde se producirán las distancias extremas.
Fig. VI-22 Bananas correspondientes a los puntos "123" y "161"

Comprobación del giro de manivelas
170
Con el fin de lograr un método gráfico más rápido para determinar las aristas de las bananas se utiliza el programa CATIA. Con este programa se dibuja los toros y se obtienen rápidamente las aristas de las bananas como intersección de las superficies de toroidales, pudiéndose determinar fácilmente las distancias entre puntos de dichas aristas.
Analizando las bananas correspondientes a los vértices "123" y "161" (Fig. VI-22) se observa que el mínimo de las distancias máximas se produce entre las intersecciones de las bananas con el plano de los ejes de los actuadores y el máximo de las distancias mínimas en la zona de corte de las bananas.
Para la geometría del manipulador que se esta considerando, con los
manipuladores formando un triángulo equilátero de un metro de lado, con un descentramiento de los puntos "01", "02", "03", "04", "05" y "06" de 0.05 metros respecto de los ejes de simetría del citado triángulo, con las seis manivelas iguales de 0.1 metros y con las seis bielas iguales de 0.6 metros, el mínimo de la distancias máximas y el máximo de las distancias mínimas son, al igual que los determinados por el método numérico, 1.22807 y 0.2226 metros. VI.3.3.5 - Distancias entre los puntos "123" y "145" y entre los puntos "145" y "161"
Para la determinación del mínimo de las distancias máximas y el máximo de las distancias mínimas entre los puntos "123" y "145" y entre los puntos 145 y 161 se seguirá el mismo proceso expuesto para los puntos "123" y "161", ya que el vértice "145" de la plataforma móvil se encontrará en el interior de otra banana similar a las correspondientes a los vértices "123" y "161". VI.3.3.6 - Conclusiones sobre la longitud de una arista
Para que una arista de la plataforma móvil sea capaz de unir los puntos extremos de las cuatro bielas correspondientes, permitiendo el giro completo de sus cuatro manivelas, sin tener en cuenta las longitudes de las otras aristas, se deberá cumplir que la longitud de arista esté comprendida entre el mínimo de las distancias máximas y el máximo de las distancias mínimas entre los puntos a unir.
El mínimo de las distancias máximas y el máximo de las distancias
mínimas se producen entre las aristas de las bananas, es decir, con las cadenas cinemáticas en PI.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
171
De los métodos utilizados, el más rápido para determinar los valores extremos de la longitud de una arista ha sido el gráfico por medio del programa CATIA.
En el ejemplo de manipulador que se ha expuesto, la longitud de una arista de la plataforma móvil debe estar comprendida entre 1.22807 y 0.2226 metros. VI.3.4 - Dimensiones de la plataforma móvil
En los apartados anteriores se ha analizado cuales deben ser las dimensiones máxima y mínima de una arista de la plataforma móvil por separado. Si se analiza ahora, por ejemplo, los máximos de las distancias mínimas entre las bananas "123" y la "161" y entre la "123" y la "145", resultará que los puntos sobre la banana "123" en los que se producen los dos máximos no coincidirán, y por lo tanto, si se pretende ensamblar dos aristas simultáneamente permitiendo el giro completo de todas las manivelas, al menos la dimensión de una de esas dos aristas deberá ser mayor que el máximo de los mínimos correspondiente a esa arista.
Fig. VI-23 Conjunto de las tres bananas.

Comprobación del giro de manivelas
172
Fig. VI-24 Esfera que corta simultáneamente a todas las aristas de las bananas.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
173
Para garantizar que una plataforma móvil triangular será capaz de unir simultáneamente tres aristas de tres bananas (Fig. VI-23), se debería estudiar las 43 = 64 combinaciones de máximos de distancias mínimas, como esto resultaría muy engorroso, por medio del programa CATIA, se dibujará una esfera que incluya o sea tangente a las doce aristas de las tres bananas simultáneamente (Fig. VI-24) y se dimensionará una plataforma móvil que sea triángulo equilátero con una longitud de lado igual al diámetro de la esfera.
En la mayoría de los casos tomando como lado del triángulo el diámetro de la esfera será suficiente, no obstante, si se quisiera ajustar más las dimensiones de la plataforma móvil, se puede analizar los puntos de tangencia de las aristas de las bananas con la esfera y comprobar si el lado del triángulo puede ser menor o debe ser mayor que el diámetro de la esfera.
En el ejemplo que se ha estudiando, debido a la simetría que supone que las longitudes de las manivelas sean iguales y de las bielas por otra parte también sean iguales. Se producen tres puntos de tangencia en la esfera sobre su diámetro máximo, repartidos a 120º, por lo que el lado del triángulo puede ser A = D cos 30º.
Con las dimensiones del manipulador que se han considerando en los ejemplos anteriores, el diámetro de la esfera que contacta con todas las aristas de las bananas es de 0.52076 metros, por lo que la longitud mínima de la arista de una plataforma móvil triángulo equilátero debe ser de 0.451 metros. Como se puede observar la lóngitud mínima considerando los tres lados (0.451 m), es mayor que la longitud mínima considerando un solo lado (0.2226 m).
En cuanto a las dimensiones máximas de las aristas, si se toma un triángulo equilátero para plataforma móvil, su lado deberá ser menor que el menor de los tres mínimos de las distancias máximas, en el ejemplo que se viene considerando, debido a la simetría del manipulador, el lado del triángulo de longitud máxima podría ser 1.22807 metros. Estas dimensiones máximas no tienen excesiva utilidad ya que si se diseñara un manipulador con la longitud de las aristas de la plataforma móvil muy próxima a las máximas el manipulador tendría poca movilidad y, por tanto, poco espacio de trabajo.
Cuando las manivelas y bielas tengan longitudes diferentes, se podría dar el caso de que la mínima longitud del lado del triángulo equilátero sea mayor que el menor de los mínimos de las distancias máximas, entonces no se podría diseñar el manipulador con plataforma móvil triángulo equilátero.

Comprobación del giro de manivelas
174
VI.4 - CONCLUSIONES
Para garantizar que las seis manivelas del Manipulador Paralelo 6-RKS con una determinada posición de los actuadores sobre la plataforma fija, puedan dar vueltas completas se sigue el proceso siguiente: - Aunque no sea estrictamente necesario, se fijan unas dimensiones máximas
de las manivelas para que no interfieran entre ellas, por ejemplo, se hace que no puedan llegar a las bisectrices de los ángulos del triángulo formado por los ejes de los actuadores. Se toman unas longitudes de las manivelas mayores que las de sus manivelas correspondientes con el fin de evitar interferencias de la plataforma móvil con la fija.
- Una vez hechas esas consideraciones preliminares y escogidas las
longitudes de manivelas y bielas, para verificar si las bielas se pueden ensamblar y las manivelas pueden dar vueltas completas, se calcula si la suma de las longitudes de las dos bielas que se unen a un determinado vértice de la plataforma móvil es mayor que la distancia máxima de los extremos de las manivelas correspondientes y si el módulo de la diferencia de las longitudes de esas bielas es menor que la distancia mínima entre los extremos de las manivelas. Si se cumplen las dos condiciones, las bielas se podrán ensamblar y las dos manivelas correspondientes, en principio, podrán dar vueltas completas.
- Después de comprobar, por lo que respecta a las longitudes de las bielas,
que las manivelas pueden dar vueltas completas, se determinan las longitudes mínima y máxima de cada lado de la plataforma móvil. Si se desea una plataforma móvil con forma de triángulo equilátero deberá tener una longitud de lado mayor que la longitud mínima y que, en principio, se puede tomar como el diámetro de una esfera que contacte con las doce aristas de las bananas calculadas por puntos o por medio de un programa gráfico como CATIA.
Si las longitudes de las manivelas o de las bielas fueran diferentes, se
podría dar el caso de no poder diseñarse un manipulador con plataforma móvil triángulo equilátero en el que las manivelas diesen vueltas completas. En este caso, por medio del programa CATIA se podría analizar las 64 combinaciones de unión de las aristas de las tres bananas y se diseñaría una plataforma móvil con diferentes longitudes de lados que permitiera a las manivelas dar vueltas completas.
Con las longitudes de las aristas de la plataforma móvil próximas a las máximas, el manipulador tendrá poco espacio de movilidad. Si hubiera alguna

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
175
arista de la plataforma móvil que tuviera su longitud mínima, se tendría riesgo de que se produzca alguna CIN, ya que la distancia mínima entre aristas de las bananas se producen cuando la arista de la plataforma móvil esta contenida en el plano formado por dos bielas y en este caso se podría producir una configuración de incertidumbre de posición.
En principio, lo ideal es que la plataforma móvil tenga la forma de triángulo equilátero y que la longitud del lado sea la mínima, así se consigue que sea mayor que la distancia mínima para un solo lado, evitando la aparición de CIN y se logra que el espacio de trabajo sea amplio.
Analizando experimentalmente el movimiento del manipulador se observa que al girar una manivela cualquiera, el manipulador realiza un movimiento de oscilación, de forma que, cuando la manivela pasa por las configuraciones de insensitividad de posición, el manipulador se encuentra en los extremos de la oscilación, de aquí se llega a la conclusión de que "el manipulador Paralelo 6-RKS tendrá las 64 CIP, si y solo si, las seis manivelas son capaces de dar vueltas completas en cualquier posición".

Comprobación del giro de manivelas
176

CONCLUSIONES GENERALES

Conclusiones generales
178

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
179
CONCLUSIONES GENERALES
C.1 - SÍNTESIS DE MECANISMOS
En el Capítulo I y en los Anexos I y II, para mostrar el proceso a seguir en la síntesis de mecanismos, se ha expuesto tres tipos de síntesis sobre mecanismos planos: - Síntesis estructural o elección del tipo de mecanismo para desarrollar un
determinado trabajo. - Síntesis de puntos de precisión para lograr que un determinado punto del
eslabón acoplador de un mecanismo manivela-oscilador pase por cinco puntos predeterminados.
- Optimización dinámica para conseguir que el par motor máximo durante una revolución de la manivela en un mecanismo manivela-oscilador accionado por un motor asíncrono sea mínimo.
C.2 - MANIPULADORES PARALELOS
Al intentar aplicar el proceso de síntesis expuesto en el Capítulo II a mecanismos espaciales, resulta que hay gran cantidad de dichos mecanismos, con unas características cinemáticas y dinámicas propias de cada uno. Por ello se ha optado por iniciar la síntesis de un tipo de mecanismos, el manipulador paralelo 6-RKS, estudiando algunas de sus características cinemáticas.
En el Capítulo III se ha realizado una aproximación al arte de los
manipuladores paralelos, sobre todo a las configuraciones singulares de los del tipo 6-RKS, no habiéndose encontrado ninguna cita sobre las ventajas de un tipo de configuraciones singulares que en esta tesis se han definido como configuraciones de insensitividad de posición (CIP).
C.3 - CONFIGURACIONES DE INSENSITIVIDAD DE POSICIÓN En el Capítulo IV, como una generalización de la utilidad de las
configuraciones de insensitividad de posición de los mecanismos planos de pistón-biela-manivela y manivela-oscilador, se ha expuesto la utilidad de las configuraciones de insensitividad de posición "CIP" del manipulador paralelo 6-RKS propuesto por Hunt para posicionar piezas, herramientas o utillajes en máquina-herramienta.

Conclusiones generales
180
Estudiando los toros, lugares geométricos de los extremos de las bielas, se ha demostrado que un vértice de la plataforma móvil se encuentra en la intersección de los toros correspondientes a las cadenas cinemáticas actuador-manivela-biela que van unidas a dicho vértice.
Una cadena cinemática se halla en posición de insensitividad (PI)
cuando el eje del actuador, la manivela y la biela se encuentran en un plano. En esta posición, el extremo de la biela se encontrará sobre la superficie de la intersección de los toros. Si las dos cadenas correspondientes a un vértice están en PI, dicho vértice se encontrará sobre una de las cuatro aristas de la intersección.
En función del número de cadenas cinemáticas que están en PI, se ha
determinado que existen: 12 CIP-1, 60 CIP-2, 120 CIP-3, 240 CIP-4 y 192 CIP-5 configuraciones de insensitividad parcial y (64 CIP-6) de insensitividad total del manipulador respecto del giro de las manivelas.
Las 64 CIP-6, que se han llamado solamente CIP, son configuraciones
puntuales de gran precisión de posición para la plataforma móvil. En estas configuraciones, pequeños errores en la posición de los actuadores no afectan a la posición de la plataforma.
Al pasar de una CIP a otra, la velocidad cuando se llegue a la nueva
posición será nula, por lo que las fuerzas de inercia, si el manipulador se detiene en esa posición, serán muy reducidas, permitiendo la utilización de motores eléctricos asíncronos, más económicos que los motores que permiten un control de su velocidad, y que sería necesario utilizar si se produjesen detenciones del manipulador fuera de sus CIP.
En estas configuraciones, los pares a aplicar a los actuadores para
equilibrar a las fuerzas y pares aplicados sobre la plataforma móvil serán nulos. Ello es debido a que las fuerzas que aparecen en los extremos de las manivelas cortan a los ejes de los actuadores.
Se ha expuesto un método numérico para la obtención de una de estas
configuraciones y a partir de ella, las 63 restantes. Observando el sistema de ecuaciones que relaciona las velocidades de
los extremos de las manivelas y de los vértices de la plataforma móvil, se ha comprobado que si en todas las cadenas cinemáticas se cumple que el eje del actuador, la manivela y la biela están en el mismo plano, el manipulador se encuentra en una CIP.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
181
En el ejemplo numérico del Capítulo IV, se han determinado las 64 CIP para un manipulador de unas dimensiones determinadas, comprobándose numéricamente que las configuraciones obtenidas son realmente CIP. C.4 - SÍNTESIS DE UN MANIPULADOR PARALELO 6-RKS
Teniendo en cuenta las ventajas de las configuraciones de insensitividad de posición, en el Capítulo V se ha expuesto un método numérico y se han realizado ejemplos para lograr que dos y tres posiciones predeterminadas de la plataforma móvil se consigan estando el manipulador en CIP.
Como valores iniciales para las iteraciones del método numérico, se
han tomado combinaciones de las posiciones que alcanza un manipulador en el que sus manivelas tienen la misma longitud y las bielas también tienen la misma longitud. Estas posiciones se han determinado en el ejemplo numérico de Capítulo IV.
Al aumentar el número de posiciones predeterminadas de la
plataforma móvil, debe ir aumentando el número de variables de diseño, así se han tomado como variables las longitudes de la manivelas y de las bielas y las coordenadas "X" de los actuadores sobre la plataforma fija.
Al diseñar el manipulador para tres CIP, en la mayoría de las soluciones que se han obtenido, la posición de los actuadores es tal que se pueden producir interferencias entre las bielas de distintas cadenas cinemáticas. Habrá que estudiar más a fondo este problema, haciendo variar por ejemplo las coordenadas "Y" ó "Z" de los actuadores para ver que otras soluciones aparecen, o prefijar de forma diferente las tres posiciones de la plataforma móvil. C.4 - COMPROBACIÓN DEL GIRO DE LAS MANIVELAS
Puestas de manifiesto las ventajas de las CIP, en el Capítulo VI se ha propuesto un proceso para comprobar si se pueden alcanzar las 64 posibles.
Al principio, se han propuesto unas precauciones, que no son estrictamente necesarias pero si son convenientes, sobre las medidas de las manivelas para evitar interferencias entre ellas y una relación entre medidas de las bielas y las manivelas para evitar que la plataforma móvil interfiera con la fija.

Conclusiones generales
182
Una vez fijadas las longitudes de manivelas y bielas, para que dos bielas se puedan ensamblar a un vértice de la plataforma móvil y a sus manivelas respectivas, permitiendo el giro de éstas, se debe cumplir que la suma de las longitudes de las dos bielas sea mayor que la distancia máxima entre los extremos de sus manivelas correspondientes y que el módulo de la diferencia de sus longitudes sea menor que la distancia mínima entre los extremos de dichas manivelas.
También se han comprobado las dimensiones de la plataforma móvil para que las seis manivelas puedan girar vueltas completas. La longitud de cada lado, analizado por separado, debe estar comprendida entre unos valores mínimo y máximo. Pero si se toma la plataforma móvil como un triángulo equilátero, resulta que las longitudes mínimas de los lados deben ser mayores que las longitudes mínimas calculadas por separado.
El extremo de cada biela queda limitado por una superficie toroidal. Al unir dos bielas en un vértice de la plataforma móvil, este vértice se encontrará en un volumen intersección de los dos toros correspondientes. A este volumen intersección se le ha llamado banana por su similitud de forma. Cuando el manipulador se encuentra en alguna CIP, todos los vértices de la plataforma móvil se encuentran sobre las aristas de las bananas. Se ha comprobado que las distancias máximas y mínimas posibles entre vértices de la plataforma móvil se producen entre aristas de las bananas.
Por medio del programa gráfico CATIA se ha dibujado una esfera que contacta a la vez con las doce aristas de las tres bananas. En la mayoría de los casos, con tomar como longitud del lado del triángulo equilátero de la plataforma móvil, la longitud del diámetro de la esfera es suficiente.
Si los ejes de los actuadores forman un triángulo equilátero y su descentramiento respecto de los ejes de simetría del triángulo es el mismo, las manivelas son iguales y las bielas, por otro lado, también son iguales, en ese caso, la longitud del lado del triángulo de la plataforma móvil puede ser A = D cos 30º.
Si las longitudes de las manivelas entre si y de las bielas por otro lado son muy diferentes, es conveniente analizar los puntos de corte y de tangencia de las aristas de las bananas con la esfera para poder determinar con mayor seguridad las dimensiones de la plataforma móvil que permita que las seis manivelas giren vueltas completas.
Con las longitudes de las aristas de la plataforma móvil próximas a las máximas, el manipulador tendrá poco espacio de trabajo. Si hubiera alguna

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
183
arista de la plataforma móvil que tuviera su longitud mínima, se tendría riesgo de que se produzca alguna CIN, ya que la distancia mínima entre aristas de las bananas se producen cuando la arista de la plataforma móvil esta contenida en el plano formado por dos bielas, y en este caso se podría producir una configuración de incertidumbre de posición.
En principio, lo ideal es que la plataforma móvil tenga la forma de
triángulo equilátero y que la longitud del lado sea la mínima, así se consigue que sea mayor que la distancia mínima para un solo lado, evitando la aparición de CIN y se logra que el espacio de trabajo sea amplio.
Las distancias máximas y mínimas, tanto entre los extremos de las manivelas como entre los puntos de unión de las bielas entre si, se producen cuando los elementos que intervienen se encuentran en posición de insensitividad. Esto ha hecho suponer que las CIP serán configuraciones en las que la posición de la plataforma móvil es extrema. Analizando experimentalmente el movimiento del manipulador se observa que al girar una manivela cualquiera, el manipulador realiza un movimiento de oscilación, de forma que, cuando la manivela pasa por las posiciones de insensitividad, el manipulador se encuentra en alguno de los extremos de la oscilación, de aquí se ha llegado a la conclusión de que "el manipulador Paralelo 6-RKS tendrá las 64 CIP, si y solo si, las seis manivelas son capaces de dar vueltas completas en cualquier posición".

Conclusiones generales
184

LÍNEAS DE INVESTIGACIÓN ABIERTAS

Líneas de investigación abiertas
186

Sintesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
187
LÍNEAS DE INVESTIGACIÓN ABIERTAS
Después de la realización de esta tesis se considera que hay temas en los que no se ha profundizado todo lo necesario y otros que han quedado fuera del alcance de este trabajo, y que pueden ser futuras líneas de investigación.
L.1 - SÍNTESIS DE UN MANIPULADOR PARALELO 6-RKS En la síntesis de un manipulador paralelo 6-RKS para lograr que
varias posiciones prefijadas de la plataforma móvil se consigan estando el manipulador en CIP, se puede continuar investigando sobre: - Las variables más convenientes a introducir en el método de obtención de
las dimensiones del manipulador. - La forma de predeterminar las posiciones de la plataforma móvil necesarias
para posicionar las piezas o utillajes. - La consecución de más de tres posiciones prefijadas de la plataforma móvil. - La utilización de configuraciones de insensitividad de posición parciales. L.2 - DIMENSIONES DEL MANIPULADOR
Sobre las dimensiones de la plataforma fija, manivelas, bielas y plataforma móvil se puede continuar investigando acerca de las dimensiones más convenientes para lograr que todas las manivelas puedan girar vueltas completas y así conseguir las 64 CIP.
L.3 - ESPACIO DE TRABAJO En los manipuladores paralelos es muy importante el estudio del
espacio de trabajo que es capaz de alcanzar la plataforma móvil. Se puede estudiar el espacio de trabajo teniendo en cuenta que los vértices de la plataforma se encuentran en el interior de sus bananas correspondientes.
Como las CIP son, en cierto modo, configuraciones extremas, se
puede estudiar el espacio de trabajo como espacio limitado por las CIP.

Líneas de investigación abiertas
188
L.4 - CONFIGURACIONES DE INCERTIDUMBRE
Si las dimensiones de la plataforma móvil se acercan a las mínimas posibles, se pueden producir CIN que sería conveniente estudiarlas.
L.5 - DINAMICA DEL MANIPULADOR Se puede realizar un estudio sobre las fuerzas estáticas y dinámicas
que aparecerán en los distintos puntos del manipulador utilizando coordenadas naturales.
L.5 - OPTIMIZACIÓN DEL MANIPULADOR
Otra línea de investigación puede ser la optimización de las dimensiones del manipulador con el fin de que sea óptimo bajo algún punto de vista.
Finalmente, como los diversos programas realizados en Matlab se han
implementado de una forma muy sencilla, se puede continuar optimizando los programas y generalizándolos para otros mecanismos.

ANEXO I
SÍNTESIS DE PUNTOS DE PRECISIÓN

Anexo I
190

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
191
ANEXO I - SINTESIS DE PUNTOS DE
PRECISIÓN AI.1 - EJEMPLO NUMÉRICO
En este anexo se diseñará un cuadrilátero articulado en el que el punto "A", eje de giro de la manivela, sea el origen de coordenadas, el eslabón fijo tenga una longitud de 650 milímetros y el punto "3" del eslabón acoplador pase por los puntos "P1", "P2", "P3", "P4", y "P5" (Fig. AI-1). AI.1.1 - Introducción de datos
P1 = (X31, Y31) = (440, 440) P2 = (X32, Y32) = (390, 480) P3 = (X33, Y33) = (310, 500) P4 = (X34, Y34) = (220, 490) P5 = (X35, Y35) = (130, 440)
Fig. AI-1 Cuadrilátero articulado

Anexo I
192
AI.1.2 - Condiciones de restricción
Las condiciones de restricción según se presentaron en el apartado II.2.2 son:
φ1 = (X1 - XA)2 + (Y1 - YA)2 - L21 = 0 (AI-1)
φ2 = (X1 - X2)2 + (Y1 - Y2)2 - L22 = 0 (AI-2)
φ3 = (X2 - XB)2+ (Y2 - YB)2 - L23 = 0 (AI-3)
φ4 = X3 - X1 - (X2 - X1) · L4 / L2 + (Y2 - Y1) · L5 / L2 = 0 (AI-4) φ5 = Y3 - Y1 - (Y2 - Y1) · L4 / L2 - (X2 - X1) · L5 / L2 = 0 (AI-5) φ6 = X3 - Xp = 0 (AI-6) φ7 = Y3 - Yp = 0 (AI-7)
Tomando las cinco primeras condiciones de restricción para las cinco
posiciones a alcanzar, (las dos últimas condiciones de restricción no son necesarias, ya que basta con tomar para el punto "3" las coordenadas que se desea que alcance dicho punto), resultan las 25 ecuaciones de restricción siguientes:
φ1 = X211 + Y2
11 - L21 (AI-8)
φ2 = X212 + Y2
12 - L21 (AI-9)
φ3 = X213 + Y2
13 - L21 (AI-9)
φ4 = X214 + Y2
14 - L21 (AI-10)
φ5 = X215 + Y2
15 - L21 (AI-11)
φ6 = (X11 - X21)2 + (Y11 - Y21)2 - L2
2 (AI-12) φ7 = (X12 - X22)2 + (Y12 - Y22)2 - L2
2 (AI-13) φ8 = (X13 - X23)2 + (Y13 - Y23)2 - L2
2 (AI-14) φ9 = (X14 - X24)2 + (Y14 - Y24)2 - L2
2 (AI-15) φ10 = (X15 - X25)2 + (Y15 - Y25)2 - L2
2 (AI-16)
φ11 = (X21 - L0)2+ Y221 - L2
3 (AI-17) φ12 = (X22 - L0)2+ Y2
22 - L23 (AI-18)
φ13 = (X23 - L0)2+ Y223 - L2
3 (AI-19) φ14 = (X24 - L0)2+ Y2
24 - L23 (AI-20)
φ15 = (X25 - L0)2+ Y225 - L2
3 (AI-21)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
193
φ16 = X31 - X11 - (X21 - X11) · L4 / L2 + (Y21 - Y11) · L5 / L2 (AI-22) φ17 = X32 - X12 - (X22 - X12) · L4 / L2 + (Y22 - Y12) · L5 / L2 (AI-23) φ18 = X33 - X13 - (X23 - X13) · L4 / L2 + (Y23 - Y13) · L5 / L2 (AI-24) φ19 = X34 - X14 - (X24 - X14) · L4 / L2 + (Y24 - Y14) · L5 / L2 (AI-25) φ20 = X35 - X15 - (X25 - X15) · L4 / L2 + (Y25 - Y15) · L5 / L2 (AI-26)
φ21 = Y31 - Y11 - (Y21 - Y11) · L4 / L2 - (X21 - X11) · L5 / L2 (AI-27) φ22 = Y32 - Y12 - (Y22 - Y12) · L4 / L2 - (X22 - X12) · L5 / L2 (AI-28) φ23 = Y33 - Y13 - (Y23 - Y13) · L4 / L2 - (X23 - X13) · L5 / L2 (AI-29) φ24 = Y34 - Y14 - (Y24 - Y14) · L4 / L2 - (X24 - X14) · L5 / L2 (AI-30) φ25 = Y35 - Y15 - (Y25 - Y15) · L4 / L2 - (X25 - X15) · L5 / L2 (AI-31)
Los valores (X11, Y11), (X12, Y12), (X13, Y13), (X14, Y14) y (X15, Y15)
son las coordenadas de las diferentes posiciones que alcanzará el punto "1" cuando el punto "3" logre las posiciones "P1", "P2", "P3", "P4" y "P5" respectivamente, y de forma similar se denominan las coordenadas para el punto "2".
Las condiciones de restricción anteriores se pueden expresar de forma compacta como:
Φ(q, t) = 0 (AI-32)
donde el vector "q", en este caso, representa no solamente las coordenadas dependientes, sino también las variables de diseño. AI.1.3 - Resolución del sistema
Para resolver este sistema de ecuaciones se utiliza el método iterativo de Newton-Raphson, basado en la linealización de las ecuaciones, consistente en la sustitución de estas ecuaciones por los dos primeros términos del desarrollo en serie de Taylor, que se pueden escribir:
Φ(q, t) = Φ(qi) + Φq(qi) · (q - qi) = 0 (AI-33)
Tomando este sistema y partiendo de un valor inicial del vector "qi", se obtiene una solución aproximada para el valor de "q" que se denomina "qi+1", ahora se vuelve a resolver el sistema tomando como valor inicial "qi+1", y así sucesivamente hasta que el valor obtenido para "q" cumpla las condiciones de restricción cometiendo un error menor que una cantidad predeterminada.

Anexo I
194
Para aplicar el método de Newton-Raphson descrito en el párrafo anterior, se utiliza el programa "PUNPRECI" realizado en MATLAB partiendo de un valor inicial del vector "q" que tenga los valores siguientes:
L1 = 150; L2 = 800; L3 = 400; L4 = 400; L5 = 250
X11 = 130; Y11 = 80 X12 = 80; Y12 = 130 X13 = 0; Y13 = 150 X14 = -80; Y14 = 130 X15 = -130; Y15 = 80 X21 = 890; Y21 = 320 X22 = 850; Y22 = 350 X23 = 770; Y23 = 380 X24 = 680; Y24 = 390 X25 = 600; Y25 = 400
AI.1.4 - Solución
Aplicando el programa, al cabo de seis iteraciones, resultan las dimensiones de los eslabones siguientes:
L1 = 134.238 mm. L2 = 828.363 " L3 = 407.887 " L4 = 422.664 " L5 = 248.306 "
El método de Newton-Raphson tiene el inconveniente de que si no se
parte de unos valores iniciales apropiados, no converge. Por ello, en la mayoría de los casos, se debe probar con varios grupos de valores iniciales hasta conseguir la convergencia a una solución real y por lo tanto a los valores finales de diseño. En este ejemplo se ha probado con cinco conjuntos de valores iniciales para conseguir finalmente la convergencia.
Unos buenos valores iniciales suelen ser los correspondientes a un cuadrilátero en el que el punto "3" por lo menos alcance una o dos de las cinco posiciones prefijadas. Esto es fácil de lograr dibujando el cuadrilátero en esas posiciones por medio de algún programa gráfico.

ANEXO II
OPTIMIZACIÓN DE UN CUADRILÁTERO ARTICULADO

Anexo II
196

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
197
ANEXO II - OPTIMIZACIÓN DE UN
CUADRILÁTERO ARTICULADO
En este anexo se presentará un método de optimización de las dimensiones de un cuadrilátero articulado para que el valor máximo del par motor durante un ciclo, es decir una revolución completa de la manivela, sea mínimo. Como condiciones de restricción se tomarán el ángulo girado por el eslabón oscilador, su longitud y la relación de tiempos entre las carreras de ida y de retorno. Al final se realizará la optimización para ejemplo numérico determinado. AII.1 - EJEMPLO NUMÉRICO
Se pretende optimizar las dimensiones de un mecanismo manivela-oscilador (Fig. AII-1) en el que el eslabón seguidor, que es una plataforma de 500 milímetros de radio, debe realizar una oscilación de 45º con una relación entre el tiempo de la carrera de ida y la de retorno de 1.25. El mecanismo se mueve por medio de un motor asíncrono de 1.1 Kw. de potencia, con velocidad nominal de 1500 r.p.m. y un reductor con relación de reducción de 25. El criterio para optimizar es que el par máximo durante un ciclo completo, es decir una vuelta completa de la manivela, sea mínimo, teniendo en cuenta que el par depende del deslizamiento del campo magnético del motor.
Fig. AII-1 Cuadrilátero articulado a optimizar.

Anexo II
198
AII.1.1 - Datos del mecanismo
Como datos del mecanismo se tienen los siguientes: - Longitud del eslabón seguidor "L4"igual al radio de la plataforma 500 mm. - Masa de la plataforma "m4" 123 Kg. - Centro de gravedad de la plataforma en el punto "B". - Momento de inercia de la plataforma respecto del punto "2" 46 Kg.m2. - Masa de la manivela "m2" 16.5 Kg. - Centro de gravedad de la manivela en el punto "A". - Momento de inercia de la manivela respecto del punto "A" 0.2 Kg.m2. - Momento de inercia del motor reducido al eje de la manivela 1.9 Kg.m2. - Momento de inercia del reductor reducido al eje de la manivela 0.4 Kg.m2. - Masa del eslabón acoplador "m3" 15 · L3 Kg.
- Momento de inercia del eslabón acoplador respecto al punto "1" I1 = 3Lm 2
3
- El momento motor de un motor asíncrono de una potencia de 1.1 Kw. es:
M =1S56.12S4
S67.117S1.3324
3
++−+ (AII-1)
siendo el deslizamiento
S = (1500-Velocidad del motor)/1500. (AII-2)
Para obtener la anterior ecuación del par motor, se parte de considerar
que la ecuación del par motor de un motor asíncrono ideal es:
M = XSR
SRK 22
222
2
+ (AII-3)
siendo "K" una constante que depende de las características físicas del
motor y de la tensión de la red, "R2" la resistencia del rotor, "X2" la reactancia del rotor y "S" el deslizamiento.
Dividiendo numerador y denominador por " R22 ", la ecuación del
momento se puede expresar como:
M = 1Sf
eS2 +
(AII-4)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
199
Tomando de un catálogo el par de un motor real, se comprueba que es imposible ajustarlo por medio de esta ecuación. Esto es debido a que un motor real tiene en el bobinado del estator una posición de las espiras por toda la ranura de alojamiento, quedando repartidas desde la superficie del entrehierro hasta lo más profundo de la ranura. Para ajustar el par real por medio de una ecuación se supone que el motor real está formado de dos motores ideales, uno con espiras superficiales y otro con espiras profundas, así la ecuación del par quedará:
M = M1 + M2 = 1Sf
eS2 +
+ 1Sh
gS2 +
= 1S)hf(SfhS)ge(S)gfhe(
24
3
++++++ (AII-5)
en la que se pueden simplificar los coeficientes y expresar como:
M = 1SdSc
bSSa24
3
+++ (AII-6)
ecuación que se puede ajustar perfectamente al diagrama del par del
motor real dado por catálogo.
La ecuación del par es una función impar, por lo tanto el par es una función simétrica respecto del origen de coordenadas (S = 0; n = 1500 r.p.m.).
Fig. AII-2 Diagrama del par motor.

Anexo II
200
Para ajustar los valores de los coeficientes de la ecuación (AII-6), partiendo de la gráfica real del par (Fig.AII-2) se toman los valores siguientes: Par nominal a 1400 r.p.m., S = 0.06666, M = 7.5 Nm. Par de arranque a 0 r.p.m., S = 1, 2.1 del par nominal, M = 15.75 " Par máximo, S = 0.3, 2.3 del par nominal, M = 17.25 " Par mínimo, S = 0.8, 2 del par nominal, M = 15 "
Con los cuatro valores de par para otros tantos valores de deslizamiento se obtienen los valores de los coeficientes de la ecuación (AII-6): a = 33.1, b = 117.67 c = - 4 y d = 12.56 AII.1.2 - Estudio cinemático
Siguiendo el proceso expuesto en el apartado II.2.3 para el mecanismo de manivela oscilador de la Fig. AII-1, suponiendo en principio que los puntos "A" y "B" y las longitudes de los eslabones son fijos y conocidos, se tendrá como vector de coordenadas dependientes:
qT = { X1, Y1, X2, Y2 } (AII-7)
y como vector de parámetros, el vector de las longitudes del eslabón fijo, manivela y eslabón acoplador:
bT = { L1, L2, L3 } (AII-8)
Las condiciones de restricción "Φ(q, b, t) = 0" en el cuadrilátero articulado se expresan como:
(XB-XA)2 + (YB-YA) 2 - L2
1 = 0 (AII-9) (X1-XA)2 + (Y1-YA) 2 - L2
2 = 0 (AII-10) (X2-X1)2 + (Y2-Y1) 2 - L2
3 = 0 (AII-11) (X2-XB)2 + (Y2-YB) 2 - L2
4 = 0 (AII-12)
De momento, para los estudios cinemático y dinámico, la primera condición de restricción no es necesaria ya que los puntos "A" y "B" se consideran fijos. Posteriormente, será necesaria al realizar el estudio de sensibilidad, ya que la distancia entre los puntos "A" y "B", así como las longitudes de la manivela y del eslabón acoplador serán las variables diseño.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
201
AII.1.2.1 - Cálculo de posición
Para definir la posición del mecanismo, se fija el ángulo " θ2 " que forma el eslabón de entrada "2" con el eslabón fijo "1", quedando entonces definida la posición del punto "1" como:
X1= XA + L2 cos( θ2 ) (AII-13) Y1 = YA + L2 sin( θ2 ) (AII-14)
Al estar definida la posición del punto "1", tampoco es necesaria de
momento la segunda condición de restricción, ya que ésta se cumplirá siempre, por lo tanto, para resolver el problema cinemático y dinámico inverso sólo serán necesarias las condiciones de restricción:
φ3 = (X2-X1)2 + (Y2-Y1) 2 - L2
3 = 0 (AII-15) φ4 = (X2-XB)2 + (Y2-YB) 2 - L2
4 = 0 (AII-16)
En el cuadrilátero articulado, la posición del punto "2" se puede obtener analíticamente de forma directa, no obstante como en mecanismos más complejos es muy difícil obtener la posición de los diversos puntos de forma directa, aquí se resuelve la posición del punto "2" por el método iterativo de Newton-Raphson (Fig. AII-3), que será el que se utilizará en los mecanismos complejos, y que se basa en el sistema de ecuaciones:
)qq)·(q()q( 1iiiqi +−Φ=Φ (AII-17)
Fig. AII-3.Método iterativo de Newton-Raphson.

Anexo II
202
Con el sistema de ecuaciones (AII-17), dando unas coordenadas iniciales " qi " se obtienen unas coordenadas " q 1i+ " para el punto "2"; ahora, tomando éstas como iniciales se va iterando hasta que el valor de "Φ" sea menor que un valor prefijado de antemano, momento en el que se considera que se cumplen las condiciones de restricción.
En el cuadrilátero articulado en estudio, el sistema de ecuaciones (AII-17) tomará la forma siguiente:
−−−−
)YY(2)XX(2)YY(2)XX(2
B2B2
1212
i
−−
+
+
YYXX
)1i(2)i(2
)1i(2)i(2 =
φφ
4
3
i
(AII-18)
Con este sistema de ecuaciones, dando unos valores iniciales a las
coordenadas del punto "2" [X2(i), Y2(i)], se obtendrán unas nuevas coordenadas para el punto "2" [X2(i+1), Y2(i+1)]. Tomando éstas como iniciales, se seguirá iterando hasta que los valores de φ3 y φ4, al sustituir en ellas los valores de X2 e Y2, sean menores que un valor prefijado de antemano, momento en el que X2 e Y2, serán solución del problema de posición. AII.1.2.2 - Cálculo de velocidades
Una vez resuelto el problema de posición, se cumplen las condiciones de restricción:
Φ(q, b, t) = 0 (AII-19)
Derivando las condiciones de restricción respecto del tiempo se tendrá:
Φq q& + Φt = 0 (AII-20)
Este sistema de ecuaciones que relaciona las velocidades, en el cuadrilátero articulado será:
=
−−
−−−−
−−
0
0
0
Y
X
Y
X
·
)YY(2)XX(200
)YY(2)XX(2)YY(2)XX(2
00)YY(2)XX(2
2
2
1
1
B2B2
12122121
A1A1
&
&
&
&
(AII-21)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
203
En este caso " 0t =Φ " porque no hay condiciones de restricción que dependan del tiempo.
Para definir el movimiento del cuadrilátero articulado se introduce una
velocidad angular "ω2" a la manivela, entonces se tendrá que las componentes de la velocidad del punto "1" serán:
X1& = - ω2 L2 sin( θ2 ) (AII-22)
Y1& = ω2 L2 cos( θ2 ) (AII-23)
En el sistema de ecuaciones (AII-21), pasando los términos conocidos al segundo miembro y despreciando la primera ecuación, ya que al ser conocidas las componentes de la velocidad del punto "1" esta ecuación se cumplirá siempre, quedará:
−−
−−
Y
X·
)YY(2)XX(2
)YY(2)XX(2
2
2
B2B2
1212
&
&= -
−−
Y
X·
00
)YY(2)XX(2
1
12121
&
& (AII-24)
Resolviendo este sistema de ecuaciones se calcularán las velocidades
del punto "2" siendo conocidas las del punto "1". AII-1-2-3. - Cálculo de aceleraciones.
Derivando respecto del tiempo el sistema de ecuaciones (AII-20) que relaciona las velocidades se obtendrá:
Φq q&& + qq &&Φ + Φ& t = 0 (AII-25)
sistema de ecuaciones que relaciona las aceleraciones de las coordenadas dependientes, y que en el cuadrilátero articulado serán:
qq &&Φ =
−−
−−−−
Y
X
Y
X
·)YY(2)XX(200
)YY(2)XX(2)YY(2)XX(2
2
2
1
1
B2B2
12122121
&&
&&
&&
&&
(AII-26)

Anexo II
204
qq &&Φ = -
−−−−
Y
X
Y
X
·Y2X200
)YY(2)XX(2)YY(2)XX(2
2
2
1
1
22
12122121
&
&
&
&
&&
&&&&&&&& (AII-26)
0t =Φ& (AII-27)
Para que el estudio cinemático del cuadrilátero articulado quede totalmente definido es necesario conocer la aceleración angular "α2" de la manivela. En tal caso, las aceleraciones del punto "1" serán:
X1&& = - ω22 L2 cos( θ2 ) - α2 L2 sin( θ2 ) (AII-28)
Y1&& = - ω22 L2 sin( θ2 ) + α2 L2 cos( θ2 ) (AII-29)
Al ser conocidas las aceleraciones del punto "1", se pasan al segundo miembro, quedando el sistema de ecuaciones (AII-25) de la forma siguiente:
−−
−−
Y
X·
)YY(2)XX(2
)YY(2)XX(2
2
2
B2B2
1212
&&
&& = -
−−
Y
X·
00
)YY(2)XX(2
1
12121
&&
&& -
-
−−−−
Y
X
Y
X
·Y2X200
)YY(2)XX(2)YY(2)XX(2
2
2
1
1
22
12122121
&
&
&
&
&&
&&&&&&&& (AII-30)
Resolviendo el sistema de ecuaciones (AII-30) se obtienen las aceleraciones del punto "2", siendo conocidas las velocidades y aceleraciones del punto "1" y las velocidades del punto "2"

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
205
AII.1.3 - Cálculo dinámico
Para resolver el problema dinámico se aplicará el sistema de ecuaciones:
M q&& + qTΦ λ = Q (AII-31)
donde:
- M es la matriz de masas del conjunto del mecanismo. Teniendo en cuenta que el eslabón "2" tiene su centro de gravedad en el punto "A", su longitud es "L2", su masa "m2" y su momento de inercia respecto del punto "A" es "IA2", el eslabón "3" tiene su centro de gravedad en el centro de su longitud, una longitud "L3", una masa "m3" y su momento de inercia respecto del punto "1" es "I13" y el eslabón "4" tiene su centro de gravedad en el punto "B", una longitud "L4", una masa "m4" y su momento de inercia respecto del punto "2" es "I24", resultará:
M =
+−−
+−−
−+
−+
LIm
LI0
LI
2m0
0LIm
LI0
LI
2m
LI
2m0
LI
LI0
0LI
2m0
LI
LI
24
2442
3
1323
133
24
2442
3
1323
133
23
13323
1322
2A
23
13323
1322
2A
(AII-32)
- " q&& ", vector de las aceleraciones de los puntos representados por las coordenadas dependientes será:
q&& =
Y
X
Y
X
2
2
1
1
&&
&&
&&
&&
(AII-33)

Anexo II
206
- " ΦTq ", traspuesta de la matriz jacobiana de las condiciones de restricción
respecto de las coordenadas dependientes en este caso será:
ΦTq =
−−
−−
−−
−−
)YY(2)YY(20
)XX(2)XX(20
0)YY(2)YY(2
0)XX(2)XX(2
B212
B212
21A1
21A1
(AII-34)
- "λ", vector de los multiplicadores de Lagrange será:
λ =
λ
λ
λ
3
2
1
(AII-35)
- "Q" será el vector de las fuerzas exteriores que actúan en los puntos "1" y "2" y que en este ejemplo serán nulas. No obstante, como con este método no se pueden introducir los pares como tales, el par motor se establece mediante una fuerza perpendicular al eslabón "2" en el punto "A" y otra del mismo módulo y dirección y sentido contrario, en el punto "1", de forma que el par de estas dos fuerzas sea igual al par motor.
Q =
−
−
0
0L
XXL
YY
22
A1
22
1A
·PAR (AII-36)
Con el sistema de ecuaciones (AII-31), desarrollado para el cuadrilátero articulado de (AII-32) a (AII-36), se pueden resolver dos tipos de problemas: el dinámico inverso, cuando se conocen las velocidades y aceleraciones y se trata de calcular el PAR, y el dinámico directo, cuando se conocen las velocidades y el PAR y se trata de calcular las aceleraciones.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
207
AII.1.3.1 - Simulación dinámica
En este caso, para poder determinar el par motor máximo con el fin de hacerlo mínimo, se debe realizar una simulación dinámica de, al menos, una vuelta de la manivela. Para realizar esta simulación dinámica se comienza poniendo unas condiciones iniciales de posición y velocidad del mecanismo, a partir de estas condiciones y del par motor correspondiente a esas condiciones se resuelve el problema dinámico directo y se obtienen las aceleraciones, se fija un incremento de tiempo para realizar la integración numérica y se calculan las nuevas velocidades y las nuevas posiciones a partir de las anteriores.
En el cálculo dinámico directo utilizado para realizar la simulación
dinámica, como las aceleraciones que se irán calculando también deberán cumplir las ecuaciones cinemáticas, al sistema de ecuaciones (AII-31) se le añadirán las ecuaciones:
qq &&Φ = - Φβ−Φ+Φα−Φ−Φ2
tqtq )q(2q &&&& (AII-37)
En el sistema (AII-37), se ha introducido la corrección de Baumgarte expuesta en el apartado (II.3.3.3) tomando α = β = 20. Con esta corrección se realizará la simulación dinámica disminuyendo el riesgo de divergencia en la solución.
Los términos de la ecuación (AII-37) serán los siguientes:
qq &&Φ =
−−
−−−−
−−
Y
X
Y
X
·
)YY(2)XX(200
)YY(2)XX(2)YY(2)XX(2
00)YY(2)XX(2
2
2
1
1
B2B2
12122121
A1A1
&&
&&
&&
&&
(AII-38)
qq &&Φ = -
−−−−
Y
X
Y
X
·
Y2X200
)YY(2)XX(2)YY(2)XX(2
00Y2X2
2
2
1
1
22
12122121
11
&
&
&
&
&&
&&&&&&&&
&&
(AII-39)
0tt =Φ=Φ & (AII-40)

Anexo II
208
)q(2 tq Φ+Φα & =40
−−−−−−
−−
YXYX
·)YY(2)XX(200)YY(2)XX(2)YY(2)XX(2
00)YY(2)XX(2
2
2
1
1
B2B2
12122121
A1A1
&
&
&
&
(AII-41)
−−+−
−−+−
−−+−
=Φβ
L)YY()XX(L)YY()XX(L)YY()XX(
·40024
2B2
2B2
23
212
212
22
2A1
2A1
2 (AII-42)
Una vez obtenidas para un instante determinado, las aceleraciones de
los puntos "1" y "2", para obtener las nuevas velocidades y posiciones en el instante siguiente se aplicarán las ecuaciones:
δ
+
=
t
2
2
1
1
2
2
1
1
2
2
1
1
Y
X
Y
X
Y
X
Y
X
Y
X
Y
X
&&
&&
&&
&&
&
&
&
&
&
&
&
&
(AII-43)
δ
+
=
t
2
2
1
1
2
2
1
1
2
2
1
1
Y
X
Y
X
Y
X
Y
X
Y
X
Y
X
&
&
&
&
(AII-44)
En este ejemplo del cuadrilátero articulado, se ha tomado como
aceleraciones y velocidades para realizar la integración numérica las medias entre las aceleraciones y velocidades actuales y las del paso anterior. De esta forma, la simulación se ajusta más a la realidad. Esta comprobación se ha realizado haciendo girar la manivela del mecanismo una vuelta completa aplicando un par nulo, resultando al final de la vuelta unos valores de posición, velocidad y aceleración que coinciden con los iniciales, tal como sucede en el mecanismo sin rozamiento.
La simulación dinámica se podría haber resuelto por medio de las rutinas de integración numérica OD23 ó OD45 de Matlab, pero en esta tesis se ha preferido realizar los programas en Matlab de la forma más simple posible.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
209
AII.1.4 - Cálculo de sensibilidad cinemática
Para conseguir que el momento motor máximo durante un ciclo del mecanismo sea mínimo, se estudiará la sensibilidad del momento motor frente a las variables de diseño, que en este caso serán las longitudes de los eslabones. Una vez determinada la sensibilidad del par motor en la posición del mecanismo en el que el par es máximo, ésta indicará el sentido en el que se deben modificar las dimensiones del mecanismo para disminuir el par máximo. AII.1.4.1 - Sensibilidad de posición
Para estudiar la sensibilidad del par motor, como éste depende de la cinemática y la dinámica del mecanismo, se inicia con el estudio de la sensibilidad de la posición respecto de las variables de diseño.
Para el estudio de la sensibilidad de la posición del cuadrilátero
articulado las condiciones de restricción serán:
Φ (q, b, t) = 0 (AII-45)
siendo el vector de coordenadas naturales:
q =
X
Y
X
Y
X
B
2
2
1
1
(AII-46)
y las variables de diseño:
b =
L
L
L
3
2
1
(AII-46)
En este caso, las condiciones de restricción no dependen del tiempo y
la longitud del eslabón "4" es fija. Con estas hipótesis y suponiendo que la

Anexo II
210
variación de longitud del eslabón "2" se producirá en la dirección de dicho eslabón, se podrá escribir:
Φ (q, b) =
−−−−+−−−+−
θ−−θ−−
LXXL)YY()XX(L)YY()XX(
sinLYYcosLXX
1AB
24
2B2
2B2
23
212
212
22A1
22A1
=
0
0
0
0
0
(AII-47)
Para calcular la sensibilidad de posición, primero se calcula la
posición del mecanismo para un determinado ángulo " θ2 " del eslabón de entrada y después, derivando la ecuación (AII-47) respecto de los parámetros, se tendrá:
0q bbq =Φ+Φ (AII-48)
siendo:
−−−−−−−=Φ
10000)XX(2)YY(2)XX(200
0)YY(2)XX(2)YY(2)XX(20001000001
2BB2B2
12122121q (AII-49)
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
=
LX
LX
LX
LY
LY
LY
LX
LX
LX
LY
LY
LY
LX
LX
LX
q
3
B
2
B
1
B
3
2
2
2
1
2
3
2
2
2
1
2
3
1
2
1
1
1
3
1
2
1
1
1
b (AII-50)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
211
−
−θ−θ−
=Φ
001000
L2000sin00cos0
3
2
2
b (AII-51)
Resolviendo el sistema de ecuaciones (AII-48), desarrollado de (AII-49) a (AII-51), se obtendrá " qb " que es la sensibilidad de las coordenadas dependientes respecto de las longitudes de los eslabones. AII.1.4.2 - Sensibilidad de velocidades
Una vez calculadas las velocidades, derivando respecto del tiempo el sistema de ecuaciones (AII-48), se obtendrá:
0qq bbqbq =Φ+Φ+Φ &&& (AII-52)
donde:
Φq =
−−
−−−−
)YY(2)XX(200
)YY(2)XX(2)YY(2)XX(2
0010
0001
B2B2
12122121
(AII-53)
Esta matriz jacobiana, debería ser la misma que la (AII-49) correspondiente a la sensibilidad de posición. Pero en ésta, se ha eliminado la quinta fila y quinta columna al no ser necesarias, ya que se sabe de antemano que la sensibilidad de la velocidad del punto "B" es cero al ser éste un punto fijo durante el funcionamiento del mecanismo.

Anexo II
212
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
=
LY
LY
LY
LX
LX
LX
LY
LY
LY
LX
LX
LX
q
3
2
2
2
1
2
3
2
2
2
1
2
3
1
2
1
1
1
3
1
2
1
1
1
b
&&&
&&&
&&&
&&&
& (AII-54)
Φ& q =
−
−−−−
X2Y2X200
0)YY(2)XX(2)YY(2)XX(2
00000
00000
222
12122121
&&&
&&&&&&&& (AII-55)
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
=
LX
LX
LX
LY
LY
LY
LX
LX
LX
LY
LY
LY
LX
LX
LX
q
3
B
2
B
1
B
3
2
2
2
1
2
3
2
2
2
1
2
3
1
2
1
1
1
3
1
2
1
1
1
b (AII-56)
θω−θω
=Φ
0000000cos00sin0
22
22
b& (AII-57)
Resolviendo el sistema de ecuaciones (AII-52), desarrollado de
(AII-53) a (AII-57), se obtendrá " qb& " que es la sensibilidad de las velocidades con respecto a las longitudes de los eslabones.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
213
AII.1.4.3 - Sensibilidad de aceleraciones
Una vez calculadas las aceleraciones, bien sea al estudiar el problema cinemático o al resolver el problema dinámico, derivando respecto del tiempo el sistema de ecuaciones (AII-52), se obtendrá:
0qq2q bbqbqbq =Φ+Φ+Φ+Φ &&&&&&&& (AII-58)
donde:
Φq =
−−
−−−−
)YY(2)XX(200
)YY(2)XX(2)YY(2)XX(2
0010
0001
B2B2
12122121
(AII-59)
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
=
LY
LY
LY
LX
LX
LX
LY
LY
LY
LX
LX
LX
q
3
2
2
2
1
2
3
2
2
2
1
2
3
1
2
1
1
1
3
1
2
1
1
1
b
&&&&&&
&&&&&&
&&&&&&
&&&&&&
&& (AII-60)
Φ& q =
−−−−
Y2X200
)YY(2)XX(2)YY(2)XX(2
0000
0000
22
12122121
&&
&&&&&&&& (AII-61)

Anexo II
214
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
=
LY
LY
LY
LX
LX
LX
LY
LY
LY
LX
LX
LX
q
3
2
2
2
1
2
3
2
2
2
1
2
3
1
2
1
1
1
3
1
2
1
1
1
b
&&&
&&&
&&&
&&&
& (AII-62)
Φ&& q =
−
−−−−
X2Y2X200
0)YY(2)XX(2)YY(2)XX(2
00000
00000
222
12122121
&&&&&&
&&&&&&&&&&&&&&&& (AII-63)
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
=
LX
LX
LX
LY
LY
LY
LX
LX
LX
LY
LY
LY
LX
LX
LX
q
3
B
2
B
1
B
3
2
2
2
1
2
3
2
2
2
1
2
3
1
2
1
1
1
3
1
2
1
1
1
b (AII-64)
θα−θωθα+θω
=Φ
0000000cossin00sincos0
22222
22222
b&& (AII-65)
Resolviendo el sistema de ecuaciones (AII-58), desarrollado de
(AII-59) a (AII-65), se obtendrá la sensibilidad de las aceleraciones " qb&& " respecto de las longitudes de los eslabones.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
215
AII.1.5 - Cálculo de sensibilidad dinámica
Una vez estudiado el problema dinámico, bien sea directo o inverso, se habrá resuelto el sistema de ecuaciones QqM T
q =λΦ+&& , derivando este sistema respecto de las longitudes de los eslabones se obtendrá:
QqMqM bTqbb
Tqbb =λΦ+λΦ++ &&&& (AII-66)
donde:
M =
+−−
+−−
−+
−+
LIm
LI0
LI
2m0
0LIm
LI0
LI
2m
LI
2m0
LI
LI0
0LI
2m0
LI
LI
24
2442
3
1323
133
24
2442
3
1323
133
23
13323
1322
2A
23
13323
1322
2A
(AII-67)
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
=
LY
LY
LY
LX
LX
LX
LY
LY
LY
LX
LX
LX
q
3
2
2
2
1
2
3
2
2
2
1
2
3
1
2
1
1
1
3
1
2
1
1
1
b
&&&&&&
&&&&&&
&&&&&&
&&&&&&
&& (AII-68)
" Mb " será una hipermatriz. Al hacer el producto qMb && , la primera columna de la matriz qMb && será el producto de la sensibilidad de la matriz de masas respecto de la longitud del eslabón "1" por " q&& ", la segunda columna será el producto de la sensibilidad de la matriz de masas respecto de la longitud del eslabón "2" por " q&& " y la tercera columna será el producto sensibilidad de la matriz de masas respecto de la longitud del eslabón "3" por "q&& ", resultando:
qMb && = [ ]qMqMqM 321 LLL &&M&&M&& (AII-69)

Anexo II
216
siendo:
·
0000
0000
0000
0000
qM 1L
=&&
Y
X
Y
X
2
2
1
1
&&
&&
&&
&&
(AII-70)
·
0000
0000
00L
M0
000L
M
qM2
22
2
11
L2
δδ
δδ
=&&
Y
X
Y
X
2
2
1
1
&&
&&
&&
&&
(AII-71)
·
LM0
LM0
0L
M0L
ML
M0L
M0
0L
M0L
M
qM
3
44
3
42
3
33
3
31
3
24
3
22
3
13
3
11
L3
δδ
δδ
δδ
δδ
δδ
δδ
δδ
δδ
=&&
Y
X
Y
X
2
2
1
1
&&
&&
&&
&&
(AII-72)
donde, teniendo en cuenta que "IA2" es constante y "m3" es
proporcional a "L3", resultará:
LI2
LM
32
2A
2
11 −=δδ (AII-73)
LI2
LM
32
2A
2
22 −=δ
δ (AII-74)
L3m
LM
LM
LM
LM
3
3
3
44
3
33
3
22
3
11 =δ
δ=δ
δ=δ
δ=δδ (AII-75)
L6m
LM
LM
LM
LM
3
3
3
42
3
31
3
24
3
13 =δ
δ=δ
δ=δ
δ=δ
δ (AII-76)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
217
−−
−−
−−
−−
=Φ
)YY(2)YY(20
)XX(2)XX(20
0)YY(2)YY(2
0)XX(2)XX(2
B212
B212
21A1
21A1
Tq (AII-77)
δλδ
δλδ
δλδ
δλδ
δλδ
δλδ
δλδ
δλδ
δλδ
=λ
LLL
LLL
LLL
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
b (AII-78)
" ΦTqb " será una hipermatriz. Al hacer el producto λΦT
qb , la primera
columna de la matriz λΦTqb será el producto de la sensibilidad de la matriz
jacobiana traspuesta respecto de la longitud del eslabón "1" por " λ ", la segunda columna será el producto de la sensibilidad de la matriz jacobiana traspuesta respecto de la longitud del eslabón "2" por " λ ", y la tercera columna será el producto de la sensibilidad de la matriz jacobiana traspuesta respecto de la longitud del eslabón "3" por "λ ", resultando:
λΦT
qb = [ ]λΦλΦλΦ Tql
Tql
Tql 321
MM (AII-79)
donde:
λ
λ
λ
δδ
δδ−
δδ
δδ−
δδ
δδ−
δδ
δδ−
δδ
δδ
δδ−
δδ
δδ
=λΦ
3
2
1
1
2
1
1
1
2
1
B
1
2
1
1
1
2
1
2
1
1
1
1
1
2
1
1
1
1
Tql ·
LY2)
LY
LY(20
)LX
LX(2)
LX
LX(20
0)LY
LY(2
LY2
0)LX
LX(2
LX2
1 (AII-80)

Anexo II
218
λ
λ
λ
δδ
δδ−
δδ
δδ−
δδ
δδ−
δδ
δδ−
δδ
δδ
δδ−
δδ
δδ
=λΦ
3
2
1
2
2
2
1
2
2
2
B
2
2
2
1
2
2
2
2
2
1
2
1
2
2
2
1
2
1
Tql ·
LY2)
LY
LY(20
)LX
LX(2)
LX
LX(20
0)LY
LY(2
LY2
0)LX
LX(2
LX2
2 (AII-81)
λ
λ
λ
δδ
δδ−
δδ
δδ−
δδ
δδ−
δδ
δδ−
δδ
δδ
δδ−
δδ
δδ
=λΦ
3
2
1
3
2
3
1
3
2
3
B
3
2
3
1
3
2
3
2
3
1
3
1
3
2
3
1
3
1
Tql ·
LY2)
LY
LY(20
)LX
LX(2)
LX
LX(20
0)LY
LY(2
LY2
0)LX
LX(2
LX2
3 (AII-82)
siendo:
δδ
δδ
δδ
δδ
δδ
δδ
=
000
000LQ
LQ
LQ
LQ
LQ
LQ
Q3
Y1
2
Y1
1
Y1
3
X1
2
X1
1
X1
b (AII-83)
donde:
LY·
LPAR
LPAR·
LYY
LQ
1
1221
22
1A
1
X1
δδ−
δδ−=
δδ
(AII-84)
LX·
LPAR
LPAR·
LXX
LQ
1
1221
22
A1
1
Y1
δδ+
δδ−=
δδ
(AII-85)

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
219
L)YY(PAR2
LY·
LPAR
LPAR·
LYY
LQ
32
1A
2
1222
22
1A
2
X1 −−δδ−
δδ−=
δδ
(AII-86)
L)XX(PAR2
LX·
LPAR
LPAR·
LXX
LQ
32
A1
2
1222
22
A1
2
Y1 −−δδ+
δδ−=
δδ
(AII-87)
LY·
LPAR
LPAR·
LYY
LQ
3
1223
22
1A
3
X1
δδ−
δδ−=
δδ
(AII-88)
LX·
LPAR
LPAR·
LXX
LQ
3
1223
22
A1
3
Y1
δδ+
δδ−=
δδ
(AII-89)
El sistema de ecuaciones (AII-66), desarrollado de (AII-67) a
(AII-89), es un sistema de 12 ecuaciones, en las que en el problema dinámico directo durante una simulación, se conocen: la matriz de masas "M", la sensibilidad de la matriz de masas respecto de las longitudes de eslabones " Mb ", la posición, velocidad, PAR, y matriz jacobiana traspuesta en un instante. Una vez resuelto el problema dinámico directo en ese instante, se conocerán los multiplicadores de Lagrange " λ ", las aceleraciones " q&& " y con éstas las velocidades " q& ", las posiciones "q" y el "PAR" en el instante siguiente. Con las nuevas posiciones, velocidades y aceleraciones se calcularán las sensibilidades de posición " qb ", de velocidad " qb& " y aceleración " qb&& ", la nueva matriz jacobiana traspuesta y la sensibilidad de la matriz jacobiana transpuesta. Finalmente, al resolver el sistema, se obtendrán las sensibilidades de los tres multiplicadores de Lagrange y del PAR respecto de las tres longitudes variables.
Por lo tanto, el sistema de ecuaciones de sensibilidad dinámica (AII-66) permite determinar la sensibilidad del PAR respecto de las longitudes de los eslabones del cuadrilátero articulado, teniendo de esta manera información para saber como variar dichas dimensiones con el fin de disminuir el PAR.

Anexo II
220
AII.2 - RESOLUCIÓN DEL EJEMPLO NUMÉRICO
En el mecanismo manivela-oscilador que se pretende optimizar la relación de tiempos es 1.25, de donde se deduce, aplicando la ecuación (AII-90), que el ángulo "α" formado por las posiciones del eslabón acoplador cuando el mecanismo se encuentra en configuración de insensitividad de posición es 20º.
Qt = 25.1180180 =
α−α+ (AII-90)
En este ejemplo, como el ángulo girado y la longitud del eslabón
seguidor son constantes, resultará que, al ir variando las longitudes de los eslabones cumpliendo las restricciones impuestas, el punto "A", punto de giro de la manivela, se desplazará sobre una circunferencia que pasa por los puntos extremos del eslabón seguidor (Fig. AII-4). Esto es debido a la propiedad geométrica de que una determinada cuerda de una circunferencia se ve bajo el mismo ángulo desde cualquier punto de una circunferencia y además este ángulo es la mitad del ángulo con que se ve dicha cuerda desde el centro de la circunferencia.
Fig. AII-4 Circunferencia, lugar geométrico de la articulación de la manivela.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
221
AII.2.1 - Longitudes de los eslabones
De la figura (AII-4) se obtiene que la longitud de la cuerda será:
'22 = 2 x 0.5 sin 22.5º = 0.38268 m. (AII-91)
El radio de la circunferencia lugar geométrico del punto "A" centro de giro de la manivela será:
R = 55945.0º20sin2
'22sin2
'22 ==α
(AII-92)
El ángulo bajo el que se verá la cuerda " 2A " será:
R22Asin.arc=β (AII-93)
Tomando el triángulo A2�C se obtendrá la distancia " '2A " como:
'2A = 2Rsin2
40 β+ (AII-94)
Como " 2A " es "L3 � L2" y " '2A " es "L3 + L2", resultará:
L2 = 2
2A'2A − (AII-95)
L3 = '2A - L2 (AII-96)
La longitud del eslabón fijo "L1" = " AB " se determinará como lado
del triángulo A2B.
L1 = )2/5.290·cos(BA·25.02A 22 β−+−+ (AII-97)
Con las ecuaciones anteriores se pueden calcular las longitudes de los eslabones fijo, manivela y acoplador para una longitud de 0.5 m. del eslabón seguidor, una relación de tiempos de 1.25, un ángulo de oscilación del eslabón seguidor de 45º y una determina distancia " 2A ".

Anexo II
222
Partiendo de una distancia mínima entre los puntos "A" y "2" de 0.2 metros para evitar interferencias de la manivela con eslabón seguidor y aumentando esta distancia en incrementos de 0.008 metros, se obtiene la relación de posibles longitudes de los eslabones siguiente:
Longitud del eslabón fijo "L1"
Longitud de la manivela "L2"
Longitud del eslabón acoplador "L3"
1 0.5134 0.1817 0.3897 2 0.514 0.1812 0.3972 3 0.5147 0.1807 0.4047 4 0.5154 0.1802 0.4122 5 0.5161 0.1797 0.4197 6 0.5169 0.1791 0.4271 7 0.5176 0.1785 0.4345 8 0.5183 0.178 0.442 9 0.5191 0.1774 0.4494 10 0.5198 0.1768 0.4568 11 0.5206 0.1762 0.4642 12 0.5214 0.1756 0.4716 13 0.5222 0.175 0.479 14 0.523 0.1743 0.4863 15 0.5238 0.1737 0.4937 16 0.5246 0.173 0.501 17 0.5254 0.1724 0.5084 18 0.5263 0.1717 0.5157 19 0.5271 0.171 0.523 20 0.528 0.1703 0.5303 21 0.5288 0.1696 0.5376 22 0.5297 0.1689 0.5449 23 0.5306 0.1681 0.5521 24 0.5315 0.1674 0.5594 25 0.5324 0.1666 0.5666 26 0.5333 0.1659 0.5739 27 0.5342 0.1651 0.5811 28 0.5351 0.1643 0.5883 29 0.5361 0.1635 0.5955 30 0.537 0.1627 0.6027 31 0.538 0.1618 0.6098 32 0.5389 0.161 0.617 33 0.5399 0.1601 0.6241 34 0.5409 0.1593 0.6313 35 0.5418 0.1584 0.6384 36 0.5428 0.1575 0.6455

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
223
37 0.5438 0.1566 0.6526 38 0.5448 0.1556 0.6596 39 0.5458 0.1547 0.6667 40 0. 5469 0.1537 0.6737 41 0.5479 0.1528 0.6808 42 0.5489 0.1518 0.6878 43 0.5499 0.1508 0.6948 44 0.551 0.1498 0.7018 45 0.552 0.1488 0.7088 46 0.5531 0.1477 0.7157 47 0.5541 0.1467 0.7227 48 0.5552 0.1456 0.7296 49 0.5563 0.1445 0.7365 50 0.5574 0.1434 0.7434 51 0.5584 0.1423 0.7503 52 0.5595 0.1412 0.7572 63 0.5606 0.14 0.764 54 0.5617 0.1388 0.7708 55 0.5628 0.1377 0.7777 56 0.5639 0.1364 0.7844 57 0.565 0.1352 0.7912 58 0.5662 0.134 0.798 59 0.5673 0.1327 0.8047 60 0.5684 0.1314 0.8114 61 0.5695 0.1301 0.8181 62 0.5707 0.1288 0.8248 63 0.5718 0.1275 0.8315 64 0.5729 0.1261 0.8381 65 0.5741 0.1248 0.8448 66 0.5752 0.1233 0.8513 67 0.5764 0.1219 0.8579 68 0.5775 0.1205 0.8645 69 0.5787 0.119 0.871 70 0.5798 0.1175 0.8775 71 0.581 0.116 0.884 72 0.5821 0.1144 0.8904 73 0.5833 0.1129 0.8969 74 0.5845 0.1113 0.9033 75 0.5856 0.1097 0.9097 76 0.5868 0.108 0.916 77 0.5879 0.1063 0.9223 78 0.5891 0.1046 0.9286 79 0.5903 0.1028 0.9348 80 0.5914 0.1011 0.9411

Anexo II
224
81 0.5926 0.0993 0.9473 82 0.5937 0.0974 0.9534 83 0.5949 0.0955 0.9595 84 0.5961 0.0936 0.9656 85 0.5972 0.0916 0.9716 86 0.5984 0.0896 0.9776 87 0.5995 0.0876 0.9836 88 0.6006 0.0855 0.9895 89 0.6018 0.0834 0.9954 90 0.6029 0.0812 1.0012 91 0.604 0.0789 1.0069 92 0.6052 0.0766 1.0126 93 0.6063 0.0743 1.0183 94 0.6074 0.0718 1.0238 95 0.6085 0.0693 1.0293 96 0.6095 0.0668 1.0348 97 0.6106 0.0641 1.0401 98 0.6117 0.0614 1.0454 99 0.6127 0.0586 1.0506
100 0.6137 0.0557 1.0557 Tabla AII-1 Relación de posibles longitudes de los eslabones del cuadrilátero.
AII.2.2 - Simulación dinámica
Una vez determinada en la tabla (AII-1) una serie de valores de longitudes de los eslabones que cumplen las condiciones propuestas para el problema, longitud del eslabón seguidor, ángulo de oscilación y relación de tiempos entre carrera de ida y retorno, se tratará de determinar la combinación de longitudes que hagan que el par máximo durante una revolución, sea mínimo.
Para una determinada combinación de longitudes de eslabones, por
medio del programa "SENCUADRIL" realizado en MATLAB se hará una simulación dinámica hasta calcular el par máximo durante un giro completo de la manivela. En esa posición del mecanismo, se calculará la sensibilidad del par respecto de las longitudes del eslabón fijo "L1", de la manivela "L2" y del eslabón acoplador "L3". Como al variar la longitud de un eslabón, las de los otros dos vendrán impuestas, se calculará la sensibilidad del par al cambiar de una combinación de longitudes a la siguiente de la tabla (AII-1), sumando los productos de la sensibilidad del par respecto de cada longitud por su respectivo incremento, obteniéndose la sensibilidad total.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
225
Partiendo de una fila cualquiera de la tabla, se realizará una simulación dinámica, calculando el par máximo y la sensibilidad total del par en esa posición del mecanismo. Según sea el signo de la sensibilidad, se tomará otra combinación de valores de longitudes de eslabones en el sentido, indicado por la sensibilidad, que haga disminuir el par. Así sucesivamente, se irán realizando simulaciones dinámicas, con nuevas longitudes de eslabones, hasta conseguir una serie de longitudes con las que la sensibilidad total del par máximo respecto de la variación de las longitudes de los eslabones sea cero, momento en el que se habrá obtenido el objetivo de que el par máximo durante una revolución de la manivela, sea mínimo. AII.2.3 - Resultados
Llevando a cabo el proceso descrito, para los datos de este ejemplo, se ha llegado a una solución en que la sensibilidad del par se hace cero para la combinación de longitudes correspondiente a la fila 70 de tabla (AII-1), y que son los siguientes:
L1 = 0.5798 m. L2 = 0.1175 m. L3 = 0.8775 m.
siendo el par máximo:
M = -135.83 Nm.
Por otro lado, realizando una comprobación exhaustiva del par máximo para todas las combinaciones de longitudes de la tabla (AII-1), se llega a determinar que el mínimo par máximo se produce para la combinación de longitudes correspondientes a la fila 56, y que son:
L1 = 0.5639 m. L2 = 0.1364 m. L3 = 0.7844 m.
siendo el par máximo:
M = -133.68 Nm.

Anexo II
226
AII.2.4 - Diagramas del par motor
En la figura (AII-5), se puede ver el diagrama del par motor a lo largo de una revolución de la manivela para un cuadrilátero articulado sin optimizar; por ejemplo para las longitudes de los eslabones correspondientes a la fila 1 de la tabla (AII-1).
Fig. AII-5 Diagrama del par motor durante una revolución de la manivela con la combinación de longitudes de eslabones correspondientes a la fila 1 de la tabla
(AII-1).
Fig. AII-6 Diagrama del par motor durante una revolución de la manivela con la combinación de longitudes de eslabones que hacen que el par máximo sea
mínimo.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
227
En la figura (AII-6) se representa el diagrama del par motor para el mecanismo optimizado. Se puede observar, que el par motor máximo ha pasado de �181.54 Nm. a �133.68 Nm, para unas longitudes de los eslabones correspondientes a la fila 56 de la tabla (AII-1).
AII.3 - CONCLUSIONES
En este anexo se ha realizado una optimización paso a paso de las dimensiones de un cuadrilátero articulado, por el método de las sensibilidades, para conseguir que el par motor máximo sea mínimo y se ha comprobado el par máximo para una serie de longitudes de eslabones propuesta.
Como se puede apreciar en los resultados, existe una pequeña
diferencia en las longitudes de los eslabones correspondientes al mecanismo que precisa mínimo par máximo según sea el método utilizado. No obstante, cabe resaltar que la diferencia del par entre estas dos combinaciones de longitudes es realmente pequeña, (1.6 %), y puede provenir de que el par máximo para cada combinación de longitudes se obtiene por medio de una simulación dinámica que puede ir acumulando pequeños errores.

Anexo II
228

REFERENCIAS

Referencias
230

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
231
REFERENCIAS
[AIT. 93] Ait-Ahmed M. Contribution à la Modélisation Géométrique et Dynamique des Robots Parallèles. Thesis Doctoral en L�Université Paul Sabatier de Toulouse, 1993.
[ALI. 85] Alizade R. I. and Sandor G. N. Determination of the Condition of Existence of Complete Crank Rotation and of the Instantaneous Efficiency of Spatial Four-Bar Mechanisms. Mechanisms and Machine Theory, Vol. 20, Nº. 3, pp. 155-163, Pergamos Press, 1985.
[BAS. 95] Basu D. and Ghosal A.
Singularity Analysis of Platform-Type Multi-Loop Spatial Mechanisms. Mechanisms and Machine Theory, Vol. 32, Nº. 3, pp. 375-389, Pergamos Press, 1997.
[BAU. 72] Baumgarte J.
Stabilization of Constraints and Integral of Motion in Dynamical Systems. Computer Methods in Applied Mechanics and Engineering, Vol. 1, pp. 1-16, 1972.
[BEG. 93] Begon P., Pierrot F. and Dauchez P. High-Precision, High-Speed Insertion With a 6 d-o-f Parallel Robot. 24th. Int. Symposium on Industrial Robots, pp. 145-152, 1993.
[BEG. 95-1] Begon P., Pierrot F. and Dauchez P.
Insertions Rapides Avec un Robot Parallèle à Six Degrés de liberté. Revue d�Automatique et de Productique Appliquées, Vol. 8, Nº. 4, pp. 513-527, 1995.

Referencias
232
[BEG. 95-2] Begon P. Commande des Robots Parallèles Rapides, Application au Robot Hexa. Tesis Doctoral en la Université de Montpellier II, 1995.
[BEN. 96-1] Benea R. and Giordano M. Dynamical Simulation for a Parallel Manipulator Applied to the 6-RKS Structure. Int. Symposium on Industrial Robots, pp. 689-694, 1996.
[BEN. 96-2] Benea R.
Contribution à l�Étude des Robots Pleinement Parallèles de Type 6-R-RR-S. Tesis Doctoral en la Universidad de Savoia (Francia), 1996.
[BOT. 71] Bottema O. The Motion of the Skew Four-Bar. Jnl. Mechanisms, Vol. 6, pp. 69-79, Pergamon Press, 1971. [BUR. 79] Burton P. Kinematics and Dinamics of Planar Machinery. Prentice Hall, 1979. [CHA. 96] Chablat D. and Wenger P. Domaines d�Unicité pour les Robots Parallèles. Rapport Interne LAN-ECN nº : 96.13, Laboratoire
d�Automatique de Nantes, 1996. [CLA. 88] Clavel R. Delta, a Fast Robot With Parallel Geometry. Proc. of the 18th. Int. Symposium on Industrial Robots, pp.
91-100, IFS Publications, 1988. [CLA. 89] Clavel R. Une Nouvelle Structure de Manipulateur Parallèle pour la
Robotique Légère. APII, Robotique, Vol. 23, pp. 501-519, Gauthiers-Villars, 1989. [CLA. 91] Clavel R. Conception d�un Robot Parallèle Rapide à 4 Degrés de Liberté. Tesis Doctoral en la École Polytechnique Fédérale de Lausanne,
1991.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
233
[CLA. 94] Clavel R. Robots Parallèles. Techniques de l�Ingénieur, Traité Mesures et Contrôle,
R 7710-1, 1994 [COL. 94] Collins C. L. and Long G. L. Line Geometry and the Singularity Analysis of an In-Parallel
Hand Controller for Force-reflected Teleoperation. DE-Vol. 72, Robotics: Kinematics, Dynamics and Controls, pp.
361-369, ASME, 1994. [COL. 97-1] Collins C. L. and McCarthy J. M. The Quartic Singularity Surfaces of Planar Parallel
Manipulators. Proceedings of the 1997 IASTED International Conference on
Robotics and Manufacturing, 1997. [COL. 97-2] Collins C. L. and McCarthy J. M. The Singular Loci of Two Triangular Paralle Manipulators. Proceeding of the 8th. International Conference on Avanced
Robotics. 1998. [COL. 97-3] Collins C. L. and McCarthy J. M. The Quartic Singularity Surfaces of Planar Platforms in the
Clifford Algebra of the Projective Plane. Mechanisms and Machine Theory, Vol. 33, Nº. 7, pp. 931-944,
Pergamos Press, 1998. [DAF. 98] Dafaoui El-M., Amirat Y., Pontnau J. and François C. Analysis and Desing of a Six-DOF Parallel Manipulator,
Modeling, Singular Configurations, and Workspace. Transactions on Robotics and Automation, Vol. 14, Nº. 1,
IEEE, 1998. [DAS. 98-1] Dasgupta B. and Mruthyunjaya T.S. Singularity-Free path Planning for the Stewart Platform
Manipulator. Mechanisms and Machine Theory, Vol. 33, Nº. 6, pp. 711-725,
Pergamos Press, 1998.

Referencias
234
[DAS. 98-2] Dasgupta B. and Mruthyunjaya T.S. Force Redundancy in Parallel Manipulators: Theoretical and
Practical Issues. Mechanisms and Machine Theory, Vol. 33, Nº. 6, pp. 727-742,
Pergamos Press, 1998. [ERD. 91] Erdman A.G. and Sandor G.N. Mechanisms Desing Analysis and Syntesis. Prentice Hall, 1991 [FER. 95] Ferrand A. and Renaud M. Analyse des Points Morts d�Une Plate-Forme Dite de Stewart. Rapport LAAS Nº. 95020, Laboratoire d�Analyse et
d�Architecture des Systèmes, Toulouse, France, 1995. Mechanisms and Machine Theory, Vol. 33, Nº. 4, pp. 409-424, Pergamos Press, 1998.
[FIO. 94] Fioretti A. Implementation-Oriented Kinematic Analysis of a 6 D.O.F.
Parallel Robotic Platform. IFAC Robot Control, pp. 31-38, Capri, Italy, 1994. [FRE. 69] Freudenstein F. and Kiss I. S. Type Determination of Skew Four-Bar Mechanisms. Journal of Engineering for Industry, Vol. 91, pp. 220-224,
Asme 1969. [FRE. 76] Freudenstein F. and Primrose E. J. F.
On the Criteria for the Rotatability of the Cranks of a Skew Four-Bar Linkage. Journal of Engineering for Industry, Vol. 98B, pp. 1285-1288, Asme 1976.
[FUN. 91] Funabashi H., Horie M., Kubota T. and Takeda Y. Development of Spatial Parallel Manipulators With Six
Degrees of Freedom. JSME International Journal, Series III, Vol. 34, Nº. 3, pp. 382-
387, 1991.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
235
[FUN. 95] Funabashi H. and Takeda Y. Determination of Singular Points and Their Vicinity in Parallel Manipulators Based on the Transmission Index. World Congress on the Theory of Machines and Mechanisms. pp. 1977-1981, 1995.
[GAR. 94] García de Jalón J. y Bayo E. Kinematic and Dynamic Simulation of Multibody System. Springer-Verlag, 1994. [GIO. 95] Giordano M. and Benea r. On the Dynamics of a 6-RKS Fully-Parallel Robot Manipulator
Structure. World Congress on the Theory of Machines and Mechanisms.
pp. 1729-1733, 1995. [GOS. 90-1] Gosselin C. M. and Ángeles J. Singular Analysis of Closed-Loop Kinematic Chains. Transactions on Robotics and Automation, Vol.6, Nº. 3, pp.
281-290, IEEE, 1990. [GOS. 90-2] Gosselin C. M. Stiffness Mapping for Parallel Manipulators. Transactions on Robotics and Automation, Vol.6, Nº. 3, pp.
377-382, IEEE, 1990. [GOS. 95] Gosselin C. M. and Wang J. Singularity Loci of Planar Parallel Manipulators. World Congress on the Theory of Machines and Mechanisms,
pp. 1982-1986, 1995. [GOS. 97] Gosselin C. M. and Wang J. Singularity Loci of Planar Parallel Manipulators With Revolute
Actuators. Robotics and Autonomous Systems, Vol. 21, pp.377-398,
Elsevier Science, 1997. [GOU. 62] Goug V.E. and Whitehall S.G. Universal Tyre Test Machine. Intl. Automobile Technical Congress: Papers and Discussions,
Vol. 117, pp 117-131, 1962.

Referencias
236
[GRA. 1883] Grashof F. Theoretische Maschinenlehre: Theorie der Getriebe. pp. 111-118. Leipzig 1883. [GUP. 71] Gupta V. K. and Radcliffe C. W. Mobility Analysis of Plane and Spatial Mechanisms. Journal of Engineering for Industry, Vol. 93, pp. 125-130,
Asme 1971. [GUP. 83] Gupta V. K. and Kazerounian S. M. K.
Synthesis of Fully Rotatable R-S-S-R Linkages. Mechanisms and Machine Theory, Vol. 18, Nº. 3, pp. 199-205, Pergamos Press, 1983.
[HAO. 98] Hao F. and McCarthy J. M. Conditions for Line-Based Singularities in Spatial Platform
Manipulators. Journal of Robotics Systems, Vol. 15, Nº. 1, pp. 43-55, John
Wiley & Sons, 1998. [HAR. 64] Harrisberguer L. Mobility Analysis of a Three-Dimensional Four-Link
Mechanism. ASME. Paper 64-WA/MD-16, 1964. [HUN. 59] Hunt K. H. Mechanisms and Motion. The English Universities Press Ltd., Londres 1959. [HUN. 78/90] Hunt K. H. Kinematic Geometry of Mechanisms. Oxford University Press, New York 1978/1990. [HUN. 82] Hunt K. H.
Geometry of Robotic Devices. Mechanical Engineering Transactions, Vol. 7, Nº. 4, pp. 213-220, The Institution of Engineers, Australia, 1982.
[HUN. 83] Hunt K. H. Structural Kinematics of In-Parallel-Actuated Robot-Arms. Journal of Mechanisms, Transmissions, and Automation in
Desing, Vol. 105, Nº 4, pp. 705-712, Asme, 1983.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
237
[HUN. 87] Hunt K. H. Spetial Configurations of Robot-Arms Via Screw Theory. Robotica, Vol. 5, pp. 17-22, Cambridge University Press, 1987. [HUN. 91] Hunt K. H., Samuel A. E. and McAree P. R. Special Configurations of Multi-Finger Multi-Freedom
Grippers- A Kinematic Study. The International Journal of Robotics Research, Vol. 10, Nº. 2,
pp. 123-134, MIT, 1991. [INN. 92] Innocenti C. and Parenti-Castelli V. Singularity-Free Evolution From One Configuration to Another
in Serial and Fully-Parallel Manipulators. DE-Vol 45, Robotics, Spatial Mechanisms and Mechanical
Systems, pp. 553-560, ASME 1992. Journal of Mechanical Desing, Vol. 120, pp. 73-79, ASME,
1998. [JIM. 97] Jiménez J.M., Álvarez G., Cardenal J. and Cuadrado J. A Simple and General Method for Kinematic Synthesis of
Spatial Mechanisms. Mechanisms and Machine Theory, Vol. 32, Nº. 3, pp. 323-341, Pergamos Press, 1997.
[KOK. 88] Kokkinis T. and Stougton R. Optimal Parallel Actuation Linkage for 3 DOF Elbow
Manipulators. Trends and Developments in Mechanisms, Machines and
Robots, Vol. 15, Nº. 3, pp. 465-472, 1988. [KUM. 92] Kumar V. Characterization of Workspaces of Parallel Manipulators. Journal of Mechanical Desing, Vol. 114, pp. 368-375, ASME,
1992. [LEE. 93] Lee S. and Kim S. Kinematic Analysis of Generalized Parallel Manipulator
Systems. Proceedings of the 32nd Conference on Decision and Control,
pp. 1097-1102, IEEE, 1993.

Referencias
238
[LIU. 93] Liu K., Lewis F., Lebret G. and Taylor D. The Singularities and Dynamics of a Stewart Platform
Manipulator. Journal of Intelligent and Robotics System, Vol. 8, pp. 287-308,
Kluwer Academic Publishers, 1993. [LON. 97] Long G. L. Use of the Cylindroid for the Singularity Analysis of Rank 3
Robot Manipulators. Mechanisms and Machine Theory, Vol. 32, Nº. 3, pp. 391-404,
Pergamos Press, 1997. [MER. 87] Merlet J.P. Parallel Manipulators, Parte 1, theory. Technical Report 646, INRIA, Mars 1987. [MER. 88] Merlet J.P. Parallel Manipulators, Parte 2, Singular Configurations and
Grassmann Geometry. Technical Report 791, INRIA, Février 1988. [MER. 89-1] Merlet J.P. Manipulateurs Parallèles, 3eme Partie: Applications. Technical Report 1003, INRIA, Mars 1989. [MER. 89-2] Merlet J.P. Manipulateurs Parallèles, 4eme Partie, Mode d�Assemblage et
Cinématique directe sous Forme Polynomiale. Technical Report 1135, INRIA, Décembre 1989. [MER. 90] Merlet J.P. An Algorithm for the Forward Kinematics of General 6 D.O.F.
Parallel Manipulators. Technical Report 1331, INRIA, Novembre 1990. [MER. 92] Merlet J.P. Manipulateurs Parallèles, 5eme Partie: Détermination de
l�Espace de Travail à Orientation Constante. Technical Report 1645, INRIA, Mars 1992.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
239
[MER. 93-1] Merlet J.P. Manipulateurs Parallèles, 6eme partie: Détermination des
Espaces de Travail en Orientation. Technical Report 1921, INRIA, Mai 1993. [MER. 93-2] Merlet J.P. Manipulateurs Parallèles, 7eme partie: Vérification et
planification de trajectorie dans l�Espace de travail. Technical Report 1940, INRIA, Juin 1993. [MER. 94] Merlet J.P. and Mouly N. Espaces de Travail et Planification de Trajectorie des Robots
Parallèles Plans. Technical Report 2291, INRIA, Mai 1994. [MER. 95] Merlet J.P. Designing a Parallel Robot for a Specific Workspace. Technical Report 2527, INRIA, Avril 1995. [MER. 96] Merlet J.P. Some Algebraic Geometry Problems Arising in the Field of
Mechanism Theory. Progress in Mathematics, Vol. 143, pp. 271-283, Birkhäuser
Verlag Basel, 1996. [MER. 97] Merlet J.P. Estimation Efficace des Caractéristiques de Robots Parallèles:
Extremums des Raideurs et des Coordonnées, Vitesses, Forces Articulaires et Singularités dans un Espace de Travail en Translation.
Technical Report 3243, INRIA, Septembre 1997. [MER. 90/97] Merlet J.P. Les Robots Parallèles. Hermes, 1990 y 1997. [MOH. 95] Mohammadi Daniali H. R., Zsombor-Murray P. J. and
Ángeles J. Singularity Analysis of a General Class of Planar Parallel
Manipulators. International Conference on Robotics and Automation, pp.
1547-1552, IEEE, 1995.

Referencias
240
[MOU. 93] Mouly N. Développement d�une Famille de Robots Paralléles à
Motorisation Électrique. Tesis Doctoral en L�École des Mines de Paris, 1993. [NEN. 97-1] Nenchev D. N. and Uchiyama M. Singularity-Consistent Path Planing and Motion Control
Through Instanteneous Self-Motion Singularities of Parallel-Link Manipulators.
Journal of Robotic System, Vol. 14, Nº. 1, pp. 27-36, John Wiley & Sons, 1997.
[NEN. 97-2] Nenchev D. N., Bhattacharya S. and Uchiyama M. Dynamic Analysis of Parallel Manipulators Under the
Singularity-Consistent Parametrization. Robotica, Vol. 15, pp. 375-384, Cambridge University Press,
1997. [NEN. 98] Nenchev D. N. and Uchiyama M. Para-Arm: A Five-Bar Parallel Manipulator With Singularity-
Perturbed Desing. Mechanisms and Machine Theory, Vol. 33, Nº. 5, pp. 453-462,
Pergamos Press, 1998. [NIE. 78] Nieto J.
Síntesis de Mecanismos. Editorial AC, Madrid, 1978.
[NOM. 93] Nombrail N. Analyse et Commande d�une Famille de Robots Manipulateurs
à Structure Parallèle et Redondante. Tesis Doctoral en L�École Nationale Supérieure de
L�Aéronautique et de L�Espace, 1993. [NOT. 94] Notash l. and Podhorodeski R. P. Uncertainty Configurations of Three-Branch Parallel
Manipulators:Identification and Elimination. DE-Vol. 72, Robotics: Kinematics, Dynamics and Controls, pp.
459-466, ASME, 1994.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
241
[NOT. 98] Notash l. Uncertainty Configurations of Parallel Manipulators. Mechanisms and Machine Theory, Vol. 33, Nº. 1/2, pp. 123-
138, Pergamos Press, 1998. [PAS. 94] Pasqui-Boutard V. Méthodes Systématiques pour la Modélisation et l�Analyse
Cinématiques des Mécanismes Complexes. Tesis Doctoral en L�Université Pierre et Marie Curie. 1994. [PIE. 90] Pierrot F., Uchiyama M., Dauchez P. and Fourier A. A New Desing of a 6-DOF Parallel Robot. Journal of Robotics and Mechatronics, Vol. 2, Nº. 4, pp.308-
315, 1990. [PIE. 91-1] Pierrot F., Dauchez P. and Fourier A. Fast Parallel Robots. Journal of Robotics Systems, Vol. 8, Nº. 6, pp.829-840, Jonh
Wiley & Sons, 1991. [PIE. 91-2] Pierrot F., Dauchez P. and Fourier A. HEXA: A Fast Six-DOF Fully-Parallel Robot. International Conference on Advanced Robotics (ICAR), Vol.
2, pp.1158-1163, IEEE, 1991. [PIE. 91-3] Pierrot F., Fourier A. and Dauchez P. Towards a Fully-Parallel 6 DOF Robot for High-Speed
Applications. Proceeding of the International Conference on Robotics and
Automation, pp.1288-1293, IEEE, 1991. [PIE. 91-4] Pierrot F. Robots Pleinement Parallèles Légers: Conception,
Modélisation et Commande. Tesis Doctoral en la Université de Montpellier II, 1991. [PIE. 92-1] Pierrot F., Fraisse P., Delabarre X. and Dauchez P. Manipulations Robotiques à Haute Vitesse: Une Solution
Pleinement Parallèle. APII, Robotique Industrielle, Vol. 26, Nº. 1, pp. 3-14, Gauthier-
Villars, 1992.

Referencias
242
[PIE. 92-2] Pierrot F., Dauchez P. and Uchiyama M. Robots Parallèle. Du Laboratoire à l�Atelier. Revue d�Automatique et de Productique Appliquées, Vol. 5 Nº.
2, pp. 49-55, 1992. [PLI. 94] Plitea N., Benea R. and Giordano M. 6-RKS: An Architecture for a 6 d. o. f. Fully-Parallel Robot
Manipulator. Advances on Robots Kinematics, Proceedings of 4th. ARK
Conference, pp. 522-532, 1994. [RAS. 87-1] Rastegar J. and Deravi P. Methods to Determine Workspace, Its Subspaces With Different
Numbers of Configurations and All the Possible Configurations of a Manipulator. Mechanisms and Machine Theory, Vol. 22, Nº. 4, pp. 343-350, Pergamos Press, 1987.
[RAS. 87-2] Rastegar J. and Deravi P. The Efect of Joint Motion Constraints on the Workspace and
Number of Configurations of Manipulators. Mechanisms and Machine Theory, Vol. 22, Nº. 5, pp. 401-409, Pergamos Press, 1987.
[RAS. 88] Rastegar J. Workspace Analysis of 4R Manipulators With Various Degrees
of Dexterity. Journal of Mechanisms, Transmissions, and Automation in
Desing, Vol. 110, pp. 42-47, Asme, 1988. [RAS. 89] Rastegar J. On the Derivation of Grashof-Type Movability Conditions With
Transmission Angle Limitations for Spatial Mechanisms. Journal of Mechanisms, Transmissions, and Automation in
Desing, Vol. 111, pp. 519-523, Asme, 1989. [RAS. 92] Rastegar J. and Tu Q.
Approximated Grashof-Type Movability Conditions for RSSR Mechanisms With Force Transmission Limitatons. Journal of Mechanical Desing, Vol. 114, pp. 74-81, Asme 1992.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
243
[SAN. 84] Sandor G. N. and Zhuang X. On the Elimination of the Branching Problem in the Synthesis of Spatial Motion Generators With Spheric Joints. Part 1: Theory. Journal of Mechanisms, Transmissions, and Automation in Desing, Vol. 106, pp. 312-318, Asme, 1984.
[SEF. 93] Sefrioui J. and Gosselin C. M. Étude et Représentation des Lieux de Singularité des
Manipulateurs Paralléles Sphériques a Trois Degrés de Liberté Avec Actionneurs Prismatiques.
Mechanisms and Machine Theory, Vol. 29, Nº. 4, pp. 559-579, Pergamos Press, 1994.
[SEF. 95] Sefrioui J. and Gosselin C. M. On the Quadratic Nature of the Singularity Curves of Planar
Three-Degree-Freedom Parallel Manipulators. Mechanisms and Machine Theory, Vol. 30, Nº. 4, pp. 533-551,
Pergamos Press, 1995. [SHI. 80] Shigley J.E. and Uicker J.J. Theory of Machines and Mechanisms. McGraw-Hill, 1980. [SKR. 67] Skreiner M. Methods to Identify the Mobility Regions of a Spatial Four-link
Mechanism. Jnl. Mechanisms, Vol. 2, pp. 415-427, Pergamon Press, 1967. [SOY. 82] Söylemez E. and Freudenstein F.
Transmission Optimization of Spatial 4-Link Mechanisms. Mechanisms and Machine Theory, Vol. 17, Nº. 4, pp. 263-283, Pergamos Press, 1982.
[ST-O. 96] St-Onge B. M. and Gosselin C. M. Syngularity Analysis and Representation of Spatial Six-DOF
Parallel Manipulators. Recent Advances in Robot Kinematics, (5th Symposium ARK),
pp. 389-398, Kluwer Academic Publishers, 1996.

Referencias
244
[STA. 97] Stamper R.E. A Three Degree of Freedom Parallel Manipulator with Only
Translational Degree of Freedom. Thesis Doctoral en University of Maryland, 1997. [STE. 65] Stewart D. A Platform With Six Degrees of Freedom. Proc. Instn. Mech. Engrs. Vol. 180, Pt. 1, Nº. 15, pp. 371-386,
1965-66. [STI. 69] Sticher F. C. O. Mobility Limit Analysis of R-S-S-R Mechanisms by �Ellipse
Diagram�. Jnl. Mechanisms, Vol. 5, pp. 393-415, Pergamon Press, 1969. [SUG. 82] Sugimoto K., Duffy J. and Hunt K. H. Spetial Configurations of Spatial Mechanisms and Robot Arms.
Mechanisms and Machine Theory, Vol. 17, Nº. 2, pp. 119-132, Pergamos Press, 1982.
[TAD. 94] Tadokoro S Control of Parallel Mechanisms.
Advanced Robotics, Vol. 8, Nº. 6, pp. 559-571, VSP and Robotics Society of Japan, 1994.
[TAH. 93] Tahamasebi F. and Tsai L-W. Workspace and Singularity Analysis of a Novel Six-DOF
Parallel Minimanipulator. Technical Research Report, T. R. 93-55, Institute for Systems
Research, University of Mariland, 1993. [TAK. 95] Takeda Y. and Funabashi H. Motion Transmissibility of In-Parallel Actuated Manipulators. JSME International Journal, Series C, Vol. 38, Nº. 4, pp.749-
755, JSME, 1995. [TAK. 96] Takeda Y. and Funabashi H. Kinematics and Static Characteristics of In-Parallel Actuated
Manipulators at Singular Points and in Their Neighborhood. JSME International Journal, Series C, Vol. 39, Nº. 1, pp. 85-93,
JSME, 1996.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
245
[TAK. 97] Takeda Y., Funabashi H. and Ichimaru H. Development of Spatial In-Parallel Actuated Manipulators With
Six Degrees of Freedom With High Motion Transmissibility. JSME International Journal, Series C, Vol. 40, Nº. 2, pp. 299-
308, JSME, 1997. [TIN. 84] Tinubu S. O. and Gupta K. C.
Optimal Syntesis of Function Generators Without the Branch Defect. Journal of Mechanisms, Transmissions, and Automation in Desing, Vol. 106, pp. 348-354, Asme, 1984.
[TOY. 93] Toyama O., Uchiyama M. and Pierrot F. Parallel Robot. Patente Nº. 5333514, 1994. [UCH. 79] Uchiyama M. A Study of Computer Control of Motion of a Mechanical Arm
(1st. Report, Calculation of Coordinative Motion Considering Singular Points).
Bulletin of de JSME, Vol. 22, Nº. 173, pp. 1640-1647, 1979. [UCH. 92] Uchiyama M., Iimura K., Pierrot F., Dauchez P., Unno K.
and Toyama O. A New Desing of a Very Fast 6-DOF Parallel Robot. 23rd. Int. Symposium of Industrial Robots, pp. 771-776, 1992. [UCH. 94] Uchiyama M. Structures and Characteristics of Parallel Manipulators. Advances Robotics, Vol. 8, Nº. 6, pp. 545-557, VSP and
Robotics Society of Japan, 1994. [VIS. 95] Vischer P. Argos: A Novel Parallel Spherical Structure. Technical Report Nº. 95-03, École Polytechnique Fédérale de
Lausanne, 1995. [WAN.J. 97] Wang J. Gosselin C. M. Kinematic Analysis and Singularity Representation of Spatial
Five-Degree-of-Freedom Parallel Mechanisms. Journal of Robotic System, Vol. 14, Nº. 12, pp. 851-869, John
Wiley & Sons, 1997.

Referencias
246
[WAN.S. 94] Wang S. L. Singularity and Duality of Parallel Robots. DE-Vol. 72, Robotics: Kinematics, Dynamics and Control, pp.
451-458, ASME, 1994. [WIL. 87] Willians II R. L. and Reinholtz C. F.
Mechanism Link Rotatability and Limit Position Analysis Using Polynomial Discriminants. Journal of Mechanisms, Transmissions, and Automation in Desing, Vol. 109, pp. 178-182, Asme, 1987.
[ZAB. 99] Zabalza I., Pintor J. M., Ros J. and Jiménez J.M.
Evaluation of the 64 "Insensitivity" Positions for a 6-RKS Hunt-Type Parallel Manipulator. Tenth World Congres on the Theory of Machine and Mechanisms, pp. 1152-1157, Oulu, Finland, June 20-24, 1999.
[ZAN. 97] Zanganeh K. E., Sinatra R. and Angeles J.
Kinematics and Dynamics of a Six-Degree-of-Freedom Parallel Manipulator With Revolute Legs. Robotica, Vol. 15, pp. 385-394, Cambridge University Press, 1997.
[ZLA. 94-1] Zlatanov D., Fenton R. G. and Benhabib B.
Singularity Analysis of Mechanisms and Robots Via a Velocity-Ecuation Model of the Instantaneous Kinematics. Int. Conf. on Robotics and Automatión, Vol. 2, pp. 986-991, IEEE, 1994.
[ZLA. 94-2] Zlatanov D., Fenton R. G. and Benhabib B. Singularity Analysis of Mechanisms and Robots Via a Motion-Space Model of the Instantaneous Kinematics. Int. Conf. on Robotics and Automatión, Vol. 2, pp. 980-985, IEEE, 1994.
[ZLA. 94-3] Zlatanov D., Fenton R. G. and Benhabib B. Analysis of the Instantaneous Kinematics and Singular Configurations of Hibrid-Chain Manipulators. DE-Vol. 72, Robotics: Kinematics, Dynamics and Controls, pp. 467-476, ASME, 1994.

Síntesis Cinemática y Dinámica de Mecanismos. Manipulador Paralelo 6-RKS
247
[ZLA. 95-1] Zlatanov D., Fenton R. G. and Benhabib B. Identification and Classification of the Singular Configurations of Mechanisms. Computational Kinematics, pp. 163-172, Kluwer Academic Publishers, 1995.
[ZLA. 95-2] Zlatanov D., Fenton R. G. and Benhabib B.
A Unifying Framework for Classification and Interpretation of Mechanisms Singularities. Journal of Mechanical Desing, Vol. 117, pp. 566-572, ASME, 1995.
[ZLA. 98] Zlatanov D., Fenton R. G. and Benhabib B.
Identification and Classification of the Singular Configurations of Mechanisms. Mechanisms and Machine Theory, Vol. 33, Nº. 6, pp. 743-760, Pergamos Press, 1998.
[ZSO. 95] Zsombor-Murray P., Husty M. and Hartmann D.
Singular Stewart-Gough Platforms With Spherocycindrical and Spheroconical Hip Jiunt Trajectories. 9th. World Congress on the Theory of Machines and Mechanisms, pp. 1886-1890, 1995.







