
Diseño e implementación del control multivariable de un péndulo sobre carro con un grado de libertad
Universidad Nacional de QuilmesIngeniería en Automatización y Control Industrial
>Autor:
>Tutor:
Esteban Kemerer
Ing. Roberto Saco

Introducción Un problema concreto con
aplicación en la industria
MecánicaElectrónica
Control
Automatización
Física
Informática

Proceso de traslado de cargas con gruas puente.
Trasladar la carga con presición en el menor tiempo posible.

Pendulación de la carga Un cambio de velocidad del carro
trae consigo una variación en el movimiento pendular de la carga

Soluciones al Problema Inmovilizar en forma mecánica la
carga para que no pendule. Mover el carro a bajas
aceleraciones. Comandar inteligentemente el
carro observando el movimiento pendular que describe la carga.
Otras.
Costos y viabilidad de la solución

Control manual
Contemplarel carro y la carga
Pensar según laexperiencia
Comandar lagrúa

Control Automático
Medir y observarvariables del
proceso
Generar actuaciones en base
al conocimiento
Actuar sobre el motor

Objetivos de este proyecto Adquirir experiencia en la
programación en un sistema operativo en tiempo real.
Diseñar e implementar un control automático y manual de la posición del péndulo.
Diseñar y construir una maqueta económica que ponga de manifiesto el problema
Desarrollar software para la adquisición, control y supervisión del péndulo.

Un Modelo ¿Por qué la necesidad de buscar
un modelo? Simplicidad y complejidad. Robustez. Predicción.
MODELO
ENTRADAS
SALI
DA
S
PERTURBACION

Variables Relevantes La entrada es la fuerza aplicada al carro. Las salidas medidas son la posición del carro y del
péndulo. Las velocidades del carro y del péndulo son variables
internas no medidas.
MODELO
Posición del carro
Velocidad del carro
Posición angular de la carga
Velocidad angular de la carga

Modelo no lineal Planteando la ecuaciones de Newton
parados en el carro y en la carga.
Parámetros: M, m, ra, rc, g, L

Ajuste de parámetros GRUPO 1: parámetros medibles (m, M, L, g)
GRUPO 2: ajustados en respuesta libre (ra, L)
GRUPO 3: ajustados automáticamente aplicando actuación a la planta (rc,
Ku).

Grupo 2

Ajuste final

Señales del proceso En un sistema discreto se manejan señales
muestreadas. El período de muestreo elegido es el mínimo que
permite el sensor de posición. Este período de muestreo debe ser elegido de
manera tal que cumpla con el teorema de muestreo. T=20 ms. Expresamos el retardo del sistema en unidades
exactas del periodo de muestreo.

4

Modelos Modelo NO lineal Modelo Lineal Modelo Discreto Modelo Discreto con actuador incorporado.

Maqueta Sensores de posición.

Maqueta Fines de carrera.

Motoreductor y sistema de tracción.

Actuador PWM

Diagrama general de conexiones

Estrategia de control Realimentación de estados con acción
integral. Ajuste de K por el método LQR.


Observador de estados


Implementación Sistemas digitales
Procesadores Sistema operativo. Procesos Scheduling Hilos Comunicación y sincronización entre procesos. Tiempo real.

QNX Microkernel Desarrollo en C o C++ Mensajeria Send-Recieve RT y robustez garantizados Photon. QNX como una red.

Software

Proceso Principal

Servidor de datos RT
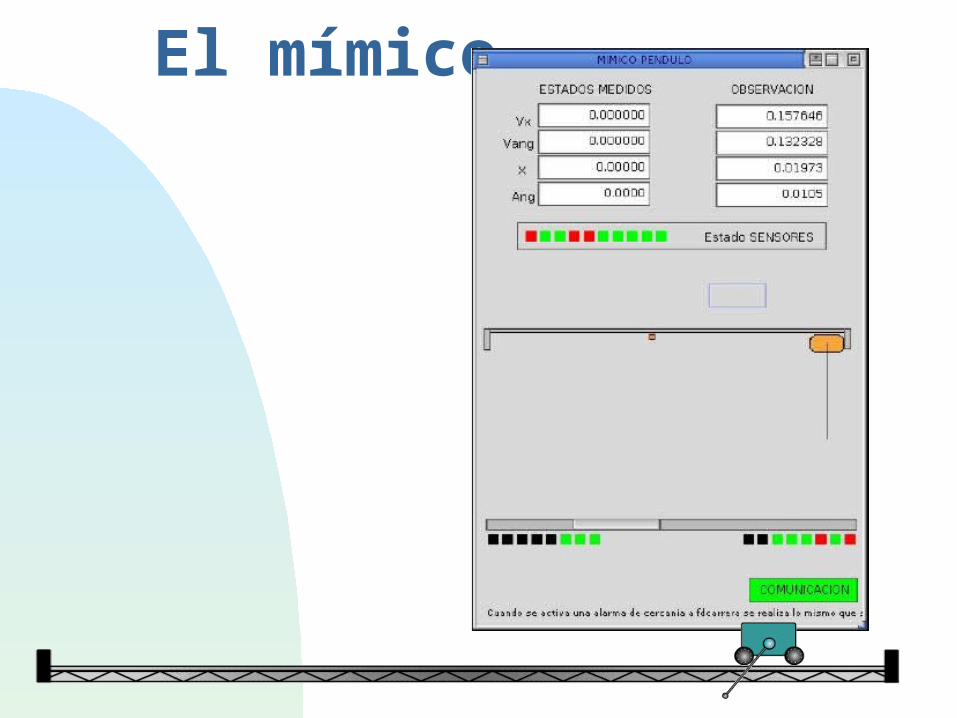
El mímico

Score Mide la performance en el traslado de la
carga. Se utiliza para el ajuste del controlador.

Exhibición Modos de funcionamiento. Inicialización del sistema. Traslado a lazo abierto (manualmente). Traslado a lazo cerrado (control automático).

Conclusiones QNX 6 es una buena plataforma para
implementar controles en RT. El control automático de oscilaciones
cumplió los objetivos satisfactoriamente. Se obtienen mejores respuestas utilizando
los estados observados. El retardo del sistema se representó de
una forma sencilla y con óptimos resultados.

FIN!!!







