
TRATAMIENTO Y TRANSMISIÓN DE SEÑALES
CUADERNO DE PRÁCTICAS
Juan Martín López

Juan Martín López
Tratamiento y Transmisión de señales 2
Practica 1. TTS. Introducción a SIMULINK
Enunciado Se trata de visualizar una señal senoidal y su cuadrado con el programa de simulación SIMULINK. Una vez se obtengan sendas señales, se pide hacer una estimación del valor cuadrático medio de ambas.
Realización Con SIMULINK se montó el siguiente circuito, con el que se puede visualizar en los bloques de tipo GRAPH cada una de las señales obtenidas.
Los parámetros de la simulación son: Runge-Kutta 5 Start Time: 0.0 Stop Time: 20 Min Step Size: 0.0001 Max Step Size: 0.01 Tolerance: 1e-3 Return Variables:
Las representaciones son las siguientes:
Juan Martín López
Tratamiento y Transmisión de señales 3
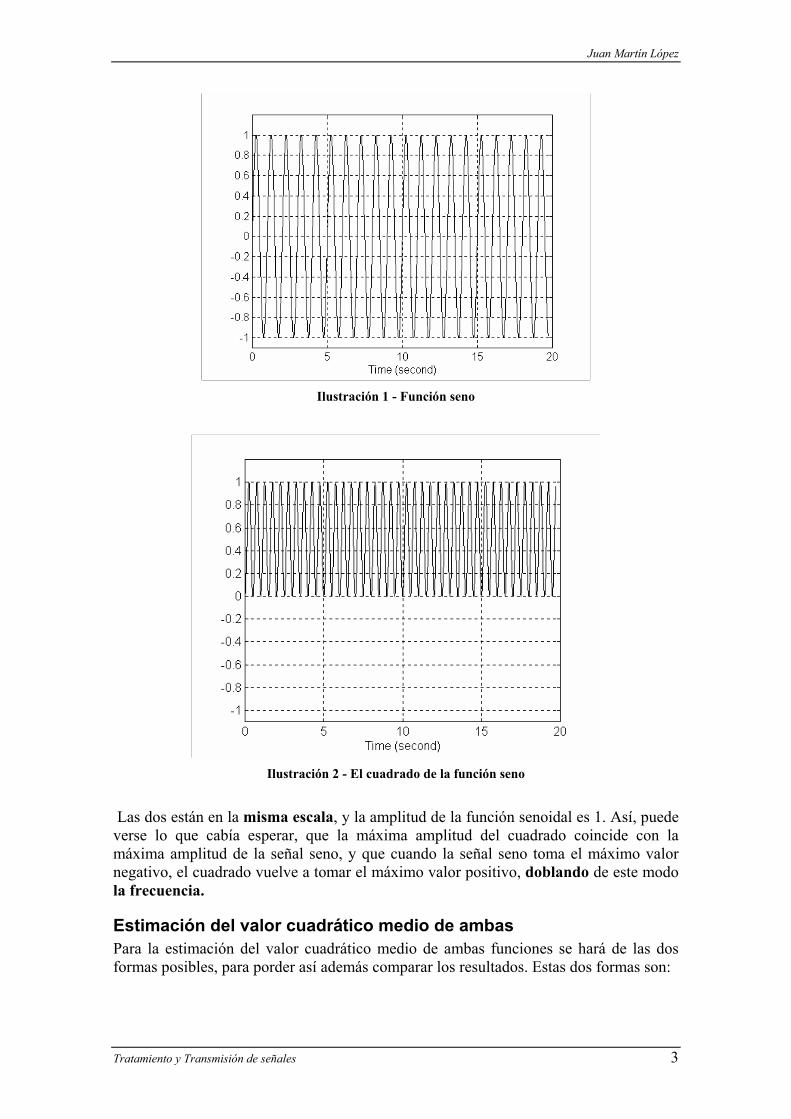
Ilustración 1 - Función seno
Ilustración 2 - El cuadrado de la función seno
Las dos están en la misma escala, y la amplitud de la función senoidal es 1. Así, puede verse lo que cabía esperar, que la máxima amplitud del cuadrado coincide con la máxima amplitud de la señal seno, y que cuando la señal seno toma el máximo valor negativo, el cuadrado vuelve a tomar el máximo valor positivo, doblando de este modo la frecuencia.
Estimación del valor cuadrático medio de ambas Para la estimación del valor cuadrático medio de ambas funciones se hará de las dos formas posibles, para porder así además comparar los resultados. Estas dos formas son:

Juan Martín López
Tratamiento y Transmisión de señales 4
1) Calculando la integral de la función con el bloque 1/s y multiplicar por el inverso del tiempo, de modo que se obtiene así el resultado.
2) Obteniendo la media como la salida de un filtro paso baja de frecuencia de corte de 1 rad/sec y de orden 4. La respuesta en frecuencia del filtro para frecuencia nula corresponde al nivel de continua de la señal, que es el valor medio.
Función seno: Las representaciones obtenidas se muestran a continuación. La calculada como salida del filtro paso baja es:
Ilustración 3 - Valor cuadrático medio
La calculada con el bloque integrador es:
Ilustración 4 – Varianza
Puede verse que las dos tienden un mismo valor 0.5, como cabía esperar.

Juan Martín López
Tratamiento y Transmisión de señales 5
Cuadrado del seno: Salida del filtro paso baja,
Ilustración 5 - Valor cuadrático medio
Y la calculada con el bloque integrador,
Ilustración 6 – Varianza
Donde se observa que se puede estimar un valor aproximadamente de 0.39 ó 0.4 para la varianza. Al igual que antes, el valor coincide en los dos métodos para su cálculo.

Juan Martín López
Tratamiento y Transmisión de señales 6
Practica 2. TTS. Cuantización con compresión logarítmica
Enunciado Estudio experimental de las ventajas e inconvenientes de la compresión logarítmica de señales.
Realización En primer lugar se pide construir un cuantizador uniforme de 3 bits y otro de 5 bits. El diagrama de bloques correspondiente se encuentra en la siguiente figura:
Usando el comando csnr(original,error) en la ventana de comandos de MatLab y obteniendo la varianza mediante el filtro paso baja analógico, para diferentes amplitudes de la señal de entrada obtenemos lo que se nos pide. Para cambiar entre 3 y 5 bits, no hay más que cambiar dentro del bloque Quantizer el parámetro correspondiente al intervalo de cuantización, según corresponda. En primer lugar veremos la SNR y la varianza del ruido para el cuantizador uniforme de 3 bits. Los resultados se muestran en la siguiente tabla:
Amplitud SNR (db) 2eσ
10 22.22 0.466 15.29 0.512 5.01 0.59
Tal y como cabía esperar, la SNR no es independiente de la señal de entrada, sino que varia con la amplitud de la misma. El valor teórico para 2
eσ es 0.52, por lo que podemos observar que se corresponde con la simulación obtenida con MatLab. A continuación se muestra la tabla correspondiente a 5 bits:
Amplitud SNR (db) 2eσ
10 31.99 0.0306 26.77 0.0372 18.69 0.026
En este caso, 2
eσ teórico es 0.032, y podemos ver que tampoco varía mucho del obtenido con MatLab. Lo segundo que se pide hacer es construir un cuantizador logarítmico. El diagrama de bloques se muestra a continuación:

Juan Martín López
Tratamiento y Transmisión de señales 7
Ahora, la entrada del cuantizador es el logaritmo de la señal original (esto es necesario tenerlo en cuenta para seleccionar el tamaño del cuanto). Como ln(0) diverge, existe un problema en torno al cero de amplitud. Los resultados para 3 bits son:
Amplitud de entrada SNR (dB) 10 8.7 6 13.12 2 9.81
Y para 5 bits:
Amplitud de entrada SNR (dB)10 25.156 23.602 24.9
Para 5 bits, se aprecia mejor la independencia de la SNR con la amplitud de entrada.
Finalmente se nos pide realizar un cuantizador con compresión ley-µ. El diagrama de bloques es:
+señal original
Se ajustó el parámetro µ=255. De nuevo, la amplitud de la señal que entra en el cuantizador hay que tenerla en cuenta para poner el tamaño del intervalo en el bloque del cuantizador.

Juan Martín López
Tratamiento y Transmisión de señales 8
En el caso de 3 bits se tiene:
Amplitud de entrada SNR (dB)10 13.966 16.412 11.35
En el caso del cuantizador de 5 bits los resultados fueron:
Amplitud de entrada SNR (dB)10 25.236 25.342 25.39
Vemos de nuevo aquí que la SNR para este tipo de cuantizador se mantiene constante independientemente podríamos decir, de la amplitud de la señal de entrada. Así mismo, podemos ver también que la SNR es mayor que en los otros casos.

Juan Martín López
Tratamiento y Transmisión de señales 9
Práctica 3. Cuantización adaptable y predictiva.
Objetivo de la práctica El objetivo de la práctica es comprobar el funcionamiento de los sistemas de cuantización adaptable hacia delante y de cuantización predictiva.
Cuantización adaptable Se pide diseñar un sistema de cuantización adaptable con adaptación de ganancia. A continuación estimar la relación señal ruido para señales de distintas varianzas, lo cual se puede hacer variando la amplitud de la señal de entrada. El tercer paso será comprobar los cambios de SNRQ cuando cambia la varianza de la señal de entrada, y por último se diseñará el sistema necesario para recuperar la señal original. En el siguiente diagrama de bloques diseñado con Simulink, se tiene el proceso completo, ya está incluido lo necesario para la recuperación de la señal original.
Señal deentrada
Sine Wave
senalentrada
*Producto
u 2̂Fcn1
filtro analógico
1/sqrt(u)
Fcn
Saturation Quantizer
1/uFcn2
Señal cuantizada*
Producto1
-+
Sum
ruidoruidosalida
Recuperada
La ganancia se calcula como la inversa de σ(n), y se multiplica por la señal de entrada. Según la definición de cuantización adaptable, lo que cuantizamos es ese producto obtenido. Es necesario transmitir la ganancia también, para luego dividir la señal que llega al recepto y obtener el valor de la señal recuperada. Haciendo variaciones en la amplitud de la señal de entrada del sistema, varía la varianza de dicha señal, y podemos hacer el estudio pedido, calculando la relación señal / ruido con la orden csnr(senal,ruido) en la ventana de comandos de MatLab. Haciendo esto se obtiene:

Juan Martín López
Tratamiento y Transmisión de señales 10
35 40 45 50
-10
-5
0
5
10
Time (second) Señal original
35 40 45 50
-1.5
-1
-0.5
0
0.5
1
1.5
Time (second) Señal cuantizada

Juan Martín López
Tratamiento y Transmisión de señales 11
35 40 45 50
-10
-5
0
5
10
Time (second) Señal recuperada Los gráficos para las otras amplitudes de entrada son de la misma forma. Los resultados de la SNR calculada para cada valor de amplitud se pueden ver en la siguiente tabla:
Amplitud de entrada SNR10 11.345 11.341 11.34
Podemos ver que la relación señal ruido no varía con los cambios de varianza de la señal de entrada.
Cuantización predictiva Se rata de diseñar un sistema predictivo en el que cada muestra se prediga igual a la anterior. Estudiar la señal error de predicción, comprobando si la varianza es menor que la correspondiente a la señal original, ya que si no, no se consigue mejorar nada. Se pide también calcular la ganancia de predicción, diseñar un sistema para recuperar la señal, como antes, y estudiar el comportamiento de la SNRQ. El diagrama de bloques de Simulink con la parte ya de recuperar la señal incluida es:

Juan Martín López
Tratamiento y Transmisión de señales 12
Sine Wave
señal original
+-
Sum
1/zUnit Delay
u 2̂Fcn
filtro analógico varianza
error depredicción
Saturation
error deprediccióncuantizado
Quantizer
+-
Sum1
diferenciaTo Workspace
u 2̂Fcn1
errcuantTo Workspace1
filtro analógico 2varianza
diferencia
++
Sum2
1/zUnit Delay1
recuperada
La señal error de predicción es:
Mientras que la señal original es

Juan Martín López
Tratamiento y Transmisión de señales 13
En todos los casos comprobados se tiene lo mismo, es decir, que la señal original tiene amplitud diez veces mayor que la señal error de predicción, de modo que la varianza de la señal error de predicción será en todos los casos menor, tal y como interesa que ocurra. La ganancia de predicción se puede conocer a partir de las varianzas de la señal original de entrada y de la señal error de predicción, ya que no es más que el cociente de estas. La SNRQ se calcula como la varianza de la señal error de predicción cuantizada dividido por la varianza de la señal error de predicción. Finalmente, la SNR total se calcula como el producto de los dos anteriores:
SNRQGSNR pe
d
d
x
e
x ·2
2
2
2
2
2
===σσ
σσ
σσ
Amplitud entrada Gp SNRQ SNR
10 42.37 20.32 860.95845 44.64 14.53 648.61921 42.55 5.23 222.5532
Se puede observar, que a medida que usamos una señal de entrada de menor amplitud (menor varianza, por tanto), la relación señal / ruido de cuantización es menor.

Juan Martín López
Tratamiento y Transmisión de señales 14
Práctica 4. Clasificación de señales basada en predicción.
Objetivo de la práctica El objetivo de la práctica es comprobar que los coeficientes de predicción lineal representan adecuadamente la parte determinista de una señal, de modo que pueden utilizarse para clasificar las señales.
Procedimiento Se nos pide considerar tan solo predicción lineal de orden 1, de modo que solo haya un coeficiente de predicción que estimar. En primer lugar se nos dice que hay que estimar el coeficiente de predicción correspondiente a señales cuadradas y triangulares de frecuencia parecida (manteniendo fija la frecuencia de muestreo). El coeficiente de predicción de orden 1 viene dado por la expresión:
{ }{ })1()1(
)1()()1(−−
−=
nxnxEnxnxEρ
De modo que puede ser calculado con el siguiente esquema en SIMULINK:
u^2Fcn
*Product
correlacion
1/uFcn1
*Product1
ro1Coeficiente_
Varianza
ro1
ButterworthIIR LP Filter
ButterworthIIR LP Filter1
SignalGenerator
1/zUnit Delay
La variable Sample Time del bloque ‘Unit Delay’ es 0.01, ya que de este modo satisfacemos el teorema de muestreo para las señales usadas. Los filtros son de orden 4 y de frecuencia de corte muy baja. Manteniendo fijas tanto la frecuencia de la señal como la frecuencia de muestreo, se hace la estimación del coeficiente de predicción lineal con ayuda del bloque del tipo ToWorkSpace que he llamado ‘ro1’. De este modo, al ejecutar en MatLab la orden ‘ro1’, obtengo el valor que alcanza dicho coeficiente. Para señales cuadradas, se tiene un coeficiente:

Juan Martín López
Tratamiento y Transmisión de señales 15
0 2 4 6 8 10-1
-0.5
0
0.5
1
Time (second) 334.0)1( ≅ρ
Para señales triangulares, se tiene:
0 2 4 6 8 10-1
-0.5
0
0.5
1
Time (second) 177.0)1( ≅ρ
Supongamos ahora que tenemos una señal incógnita que queremos saber, a partir del coeficiente de predicción lineal de orden 1, si es de tipo cuadrada o triangular. Las señales anteriores tienen una frecuencia 100, si ponemos una señal de frecuencia 105, obtenemos un valor 166.0)1( ≅ρ para señal triangular, y 322.0)1( ≅ρ para la señal cuadrada, de modo que podemos decir que dicho coeficiente caracteriza al tipo de señal. A continuación, se repite el proceso, pero esta vez para señales tipo seno de frecuencias claramente distintas, para llegar a la conclusión de que también se pueden distinguir estas señales a partir del coeficiente de predicción lineal de orden 1. En primer lugar, se usa una señal seno de frecuencia 100, obteniendo:

Juan Martín López
Tratamiento y Transmisión de señales 16
0 10 20 30 40 50-1
-0.5
0
0.5
1
Time (second) 540.0)1( ≅ρ
Y si ponemos ahora una frecuencia 50 por ejemplo, claramente distinta:
0 10 20 30 40 50-1
-0.5
0
0.5
1
Time (second) 878.0)1( ≅ρ
Ahora, para hacer la comprobación, podemos usar una señal de frecuencia 105, que suponemos en principio como si no supiésemos la frecuencia y queremos ver a cual de las dos anteriores se parece más, el resultado es 498.0)1( ≅ρ . De modo que también en este caso podemos apreciar que la señal es de frecuencia parecida a la señal que era de frecuencia 100,ya que el coeficiente obtenido se aproxima mucho más a este caso. Con esta segunda comprobación queda cubierto el objetivo de la práctica, que era comprobar que el coeficiente de predicción lineal representa la parte determinista de una señal.

Juan Martín López
Tratamiento y Transmisión de señales 17
Práctica 5: Teorema de muestreo y filtrado elemental.
Objetivo de la práctica. El objetivo de esta práctica es la comprobación experimental de la importancia del teorema de muestreo y las consecuencias que puede llevar el no respetarlo. Así mismo, se tendrá un primer contacto con el filtrado digital de señales.
Procedimiento. En primer lugar se nos pide muestrear una señal con distintas frecuencias por encima y por debajo de la frecuencia de Nyquist, esto se hace con el siguiente diagrama de bloques en SIMULINK.
Señal
Generadorde pulsos
*Producto
Analog ButterworthLP Filter
Muestreada
Recuperada
Cuando se respeta el teorema de muestreo, la señal muestreada tiene la forma que se puede ver en la siguiente figura:

Juan Martín López
Tratamiento y Transmisión de señales 18
Y la señal recuperada filtrando de frecuencia igual al ancho de banda de la señal, tenemos,
Sin embargo si muestreamos a una frecuencia por debajo de la frecuencia de Nyquist, al intentar recuperar la señal nos encontramos con algo de este estilo:

Juan Martín López
Tratamiento y Transmisión de señales 19
Como vemos, la consecuencia de no respetar el teorema de muestreo, es que a la hora de intentar recuperar la señal original se obtiene una señal distorsionada que no se parece a la original. Del mismo modo, se puede observar el efecto observando el espectro de la señal muestreada. Para ello, se añade un bloque Power Spectral Sensity con el objetivo de obtener el espectro de la señal.
Señal
Generadorde pulsos
*Producto
Analog ButterworthLP Filter
Recuperada
Muestreada
Power SpectralSensity
Dicho espectro, para cuando la señal se muestrea respetando el teorema de muestreo es de la forma:
Juan Martín López
Tratamiento y Transmisión de señales 20
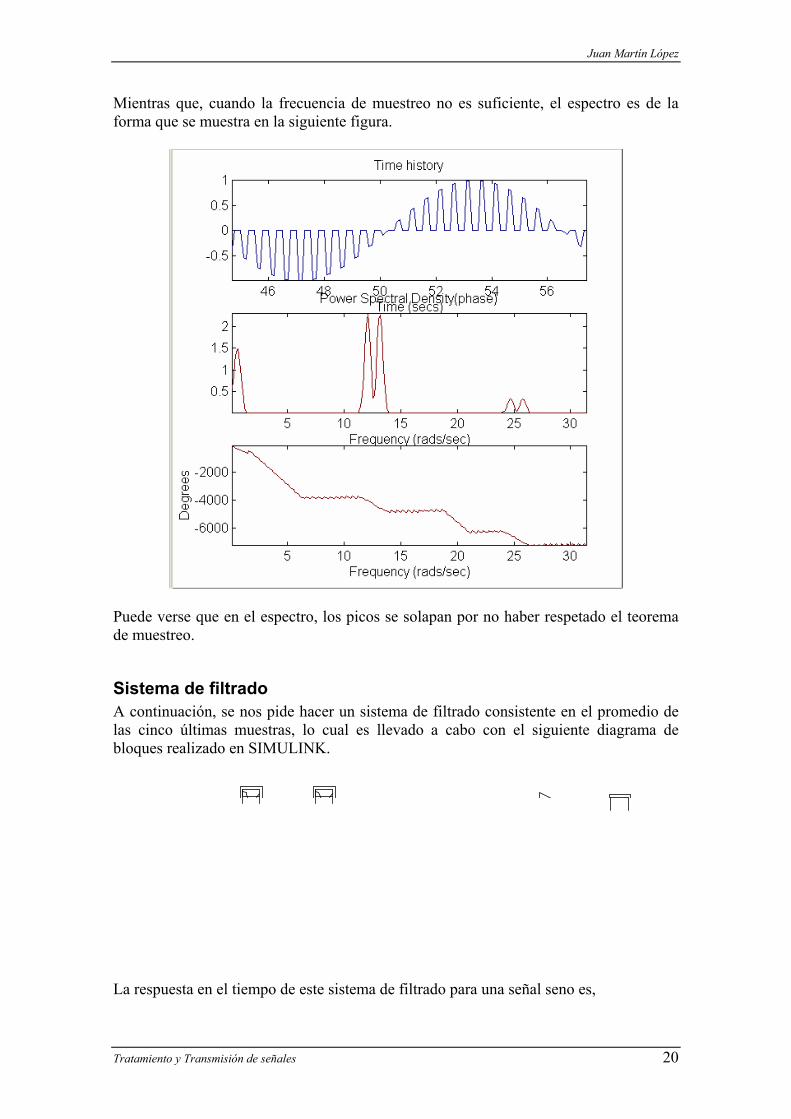
Mientras que, cuando la frecuencia de muestreo no es suficiente, el espectro es de la forma que se muestra en la siguiente figura.
Puede verse que en el espectro, los picos se solapan por no haber respetado el teorema de muestreo.
Sistema de filtrado A continuación, se nos pide hacer un sistema de filtrado consistente en el promedio de las cinco últimas muestras, lo cual es llevado a cabo con el siguiente diagrama de bloques realizado en SIMULINK.
La respuesta en el tiempo de este sistema de filtrado para una señal seno es,

Juan Martín López
Tratamiento y Transmisión de señales 21
Mientras que para una señal tipo cuadrado, se tiene:
-1
-0.5
0
0.5
1
A continuación queremos ver la respuesta en frecuencia del sistema de filtrado. Para ello, lo primero será añadir un bloque Spectrum Analyzer al diagrama de bloques:

Juan Martín López
Tratamiento y Transmisión de señales 22
Señal
Generadorde pulsos
*Producto
Original Muestreada
1/zUnit Delay
1/zUnit Delay2
1/zUnit Delay3
1/zUnit Delay1
1/zUnit Delay4
+++++
Sum
1/5
Gain
Spectrum Analyzer
Promedio
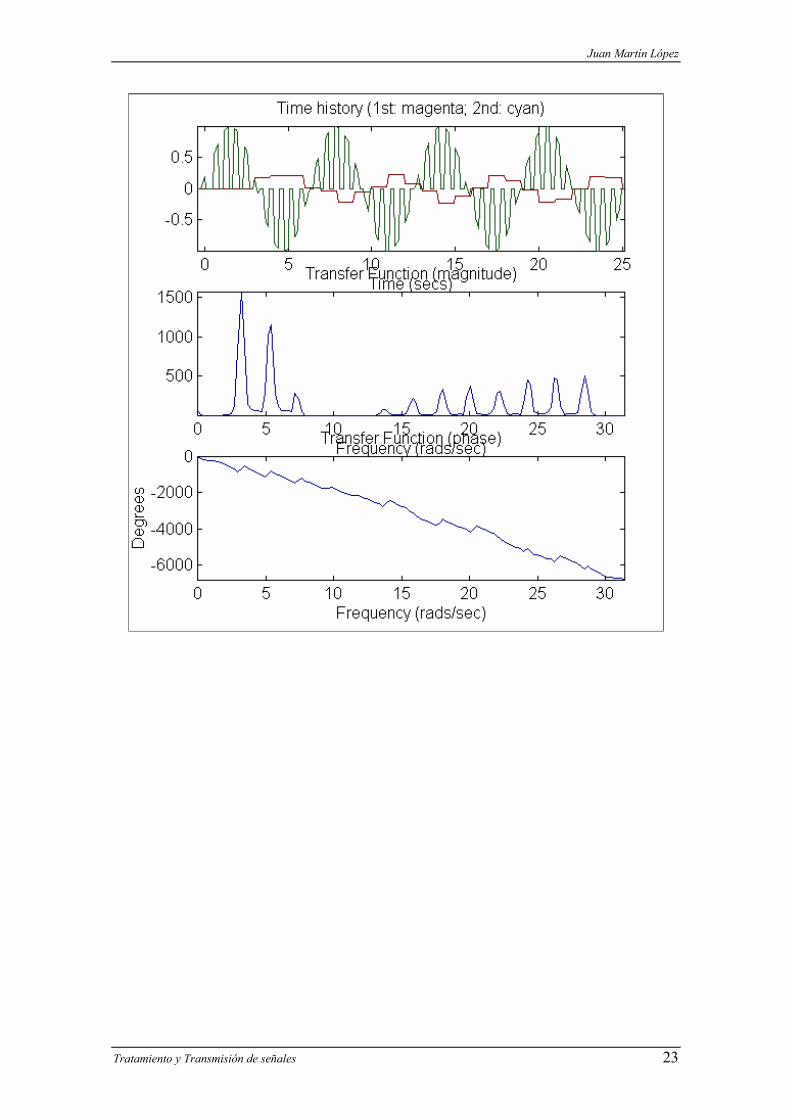
Para una señal cuadrada, la salida del analizador de espectros es,
Mientras que si la señal es senoidal, la salida es como se muestra a continuación:
Juan Martín López
Tratamiento y Transmisión de señales 23

Juan Martín López
Tratamiento y Transmisión de señales 24
Práctica 6: Respuesta en frecuencia de un filtro peine.
Objetivo de la práctica El objetivo de ésta práctica es el estudio en frecuencia del filtro peine, cuya funcion de transferencia es de la forma:
LzzG −−= 1)(
Procedimiento Lo primero que se hace es implementar un filtro peine en SIMULINK. Se coge una señal de entrada, se muestrea, y a continuación se le hace pasar por un filtro con una función de transferencia ajustada a la función de transferencia del filtro peine.
SignalGenerator
Zero-OrderHold
1+-z -2
1 Filter
Spectrum Analyzer
Finalmente, haciendo uso del bloque Spectrum Analyzer se puede visualizar la forma del espectro de la señal. Para ver mejor como es la respuesta en frecuencia de este tipo de filtro, a continuación se muestra dicha respuesta en frecuencia; primero para una misma señal de entrada y varios órdenes del filtro y finalmente para un orden del filtro fijo y variando las señales de entrada. La señal de entrada es en principio una señal seno de frecuencia 2 π. La frecuencia de muestreo es de 0.1 s.

Juan Martín López
Tratamiento y Transmisión de señales 25
Señal de entrada fija: Variación del orden del filtro.
L = 2 L = 4
L = 7 L = 8
Se puede observar que cuanto más alto es el orden del filtro, más “dientes de peine” se tienen en el espectro, es decir, en la respuesta en frecuencia del mismo.

Juan Martín López
Tratamiento y Transmisión de señales 26
Orden del filtro fijo igual a 8: Señales de entrada distintas.
Amplitud 1 – Frecuencia 2π Amplitud 1 – Frecuencia π
Amplitud 2 – Frecuencia 2π Amplitud 2 – Frecuencia π
Del mismo modo que se comprobó que variando el orden del filtro se obtenían resultados distintos, podemos ver que al variar la señal de entrada pero mantener el orden del filtro fijo, la respuesta en frecuencia apenas se ve afectada.

Juan Martín López
Tratamiento y Transmisión de señales 27
Práctica 7: Síntesis de señales a partir de su desarrollo en serie de Fourier.
Objetivo de la práctica El objetivo es el de sintetizar una señal cuadrada a partir de una suma de armónicos senoidales impares. Primero se ve una demostración de MATLAB y luego se reproducen los resultados observados mediante el uso de SIMULINK.
Procedimiento Inicialmente, en la ventana de MATLAB se ejecuta la orden “fourier”, y se siguen las instrucciones que van apareciendo en pantalla. Podemos ver a continuación algunas representaciones obtenidas: y = sin(t) + sin(3*t)/3 + sin(5*t)/5 + sin(7*t)/7 + sin(9*t)/9;
Para los armónicos del 1 al 9 (impares). Y ahora se muestran todas las señales construidas desde el 1º hasta el 19º armónico (sólo impares). Se puede apreciar que nos aproximamos cada vez más a la forma de una señal cuadrada.

Juan Martín López
Tratamiento y Transmisión de señales 28
Finalmente se nos muestra la transición mediante una figura tridimensional para que veamos lo que ocurre en función del número de términos usados.

Juan Martín López
Tratamiento y Transmisión de señales 29
A continuación, se hace lo mismo, pero con SIMULINK. Se construye el siguiente diagrama de bloques:
Armónico 1
Armónico 31/3
Gain
1/5
Gain1Armónico 5
Armónico 71/7
Gain2
1/9
Gain3Armónico 9
Graph
+++++
Sum
La salida que muestra este sistema es:
donde apreciamos que se aproxima a una señal cuadrada, como debía de salir.

Juan Martín López
Tratamiento y Transmisión de señales 30
Práctica 8: Diseño de distintos tipos de filtros.
Objetivo de la práctica El objetivo de esta práctica es comprobar los resultados del diseño de filtros digitales de distinto tipo. Se hará el desarrollo de un filtro digital, se implementa en SIMULINK y se compara con otros métodos de diseño proporcionados por MATLAB.
Procedimiento El diseño del filtro se hace en base al problema 29, en el cual se diseña un filtro paso bajo por invarianza al impulso a partir del filtro analógico:
11)(+
=s
sG
En el enunciado del problema se dice que se quiere diseñar para frecuencia de muestreo de 160 Hz (período de muestreo de la señal de entrada será 1/160 s) y frecuencia de corte de 50 Hz. El diseño del sistema se muestra a continuación:
Entradaseno discreta
Spectrum Analyzer
Práctica 8 de TTSDiseño de distintos tipos de filtros
1005.31 1-1.87E-3z -1
Filtro paso baja
El comportamiento del sistema viene representado en la grafica siguiente:

Juan Martín López
Tratamiento y Transmisión de señales 31
Puede observarse que la frecuencia de corte del filtro que hemos diseñado es de 50 Hz, ya que vemos que la respuesta en frecuencia decae alrededor de los 314 rad/s que corresponde a 2*pi*50. Usando ahora ‘filtdemo’ en MATLAB, se intentan implementar los filtros del mismo tipo que el anterior para ver si se comportan igual en su respuesta en frecuencia. Las respuestas son las siguientes:

Juan Martín López
Tratamiento y Transmisión de señales 32
Como puede observarse en las figuras, según el tipo de diseño usado para el filtro, hay veces que con un orden inferior se consigue el mismo tipo de filtro que se desea diseñar. En otros casos, sin embargo, como el segundo caso (FIRLS) se necesita inclusive orden 22 para conseguir la respuesta en frecuencia deseada.







