Download - Sistemas Dinámicos - Semana 14
SISTEMAS DINÁMICOS: CAPITULO 4- PROPIEDADES DE SISTEMAS.
Ing. Gerardo Becerra B. M.Sc.
Propiedades de sistemas.
1. Explicar las propiedades funcionales y de comportamiento (intencional y no intencional) que surgen de un sistema. (CDIO 2.3.2.2)
2. Clasificar las interacciones externas al sistema y el impacto en el comportamiento del mismo (CDIO 2.3.1.4)
3. Explicar el sistema por su comportamiento y efectos (CDIO 2.3.1.1)
4. Identificar los factores generadores del comportamiento del sistema (CDIO 2.3.3.3)
2 GJB-May-2015
Clase 14
Contenido:
1. Definir las propiedades de controlabilidad y observabilidad.
2. Evaluar la sensibilidad de un sistema. 3. Evaluar efectos de la realimentación negativa.
3 GJB-May-2015
Temas para repasar
• Descripción de sistemas en el dominio del tiempo y la frecuencia (Circuitos en frecuencia)
• Representación matricial de transformaciones lineales; valores y vectores propios (Algebra Lineal)
4 GJB-May-2015
Controlabilidad y Observabilidad
• Controlabilidad y observabilidad sirven para describir la interacción entre el mundo externo (entradas y salidas) y las variables internas del sistema (estados).
5 GJB-May-2015
Controlabilidad
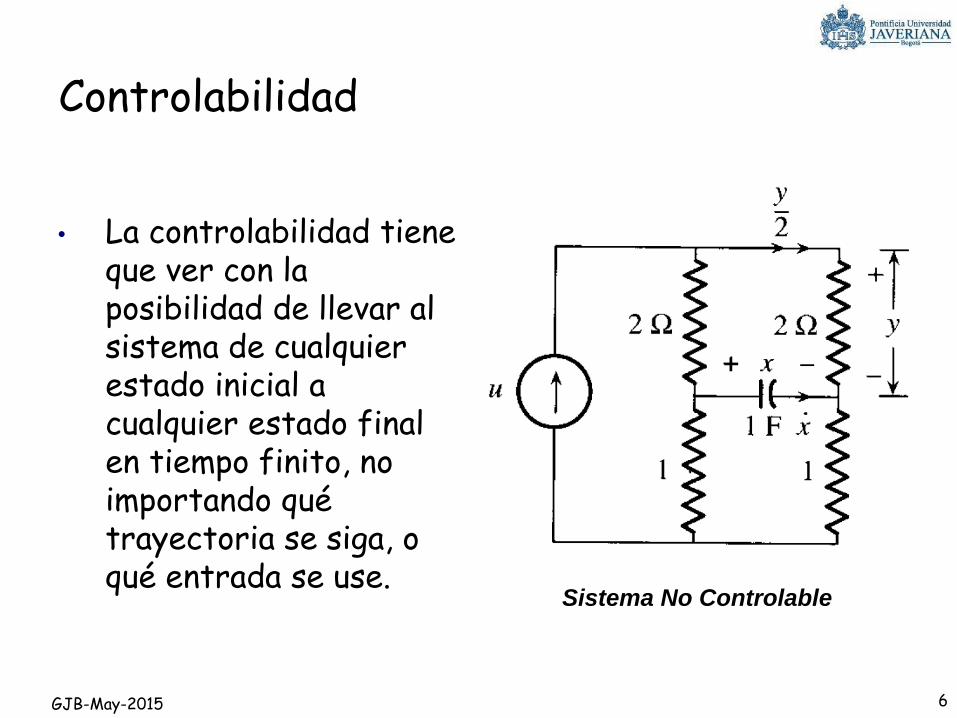
• La controlabilidad tiene que ver con la posibilidad de llevar al sistema de cualquier estado inicial a cualquier estado final en tiempo finito, no importando qué trayectoria se siga, o qué entrada se use.
Sistema No Controlable
6 GJB-May-2015
Controlabilidad
• Como la controlabilidad relaciona las entradas y los estados del sistema, la ecuación de salida es irrelevante y por lo tanto se habla de la controlabilidad del par (A,B)
7 GJB-May-2015
Controlabilidad
• “La ecuación de estado de un sistema es completamente controlable si existe una entrada U(t), que pueda transferir cualquier estado inicial a cualquier estado final en un tiempo finito, en caso contrario no es controlable”
• Sistema controlable si y sólo si rango C = n,
)BAABB( 1n C
8 GJB-May-2015
Observabilidad
• El concepto de observabilidad es dual al de controlabilidad, e investiga la posibilidad de estimar el estado del sistema a partir del conocimiento de la entrada y la salida.
9 GJB-May-2015
Observabilidad
• “Un sistema es completamente observable si y solo si existe un tiempo finito t, tal que el estado inicial se puede determinar a partir de las salidas y de las entradas .”
• Sistema observable si y sólo si rango Ô = n
1nCA
CA
C
O
10 GJB-May-2015
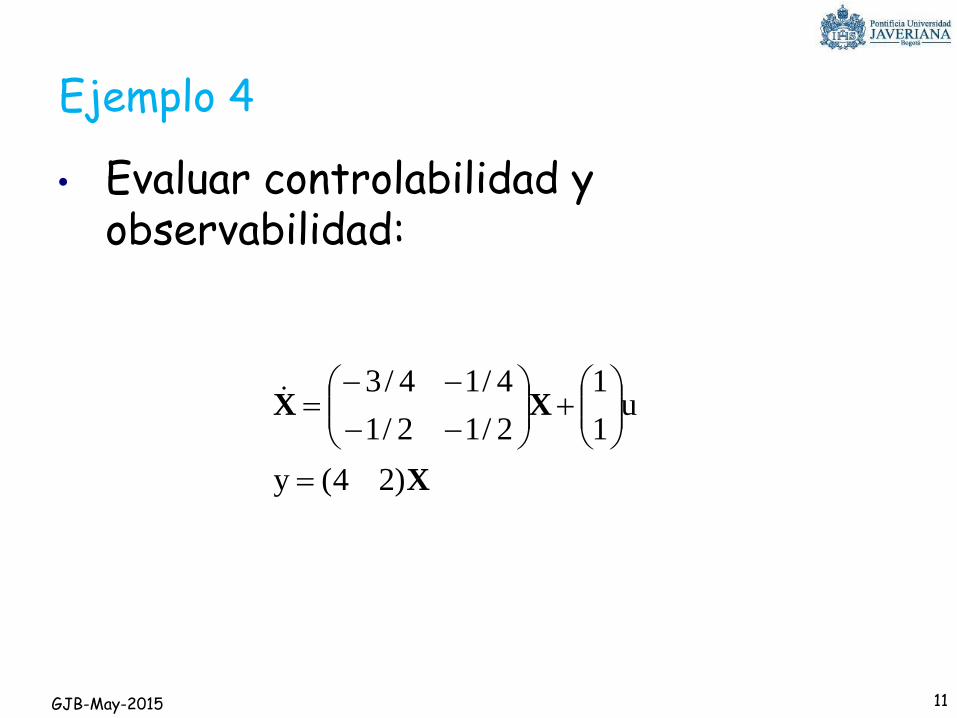
Ejemplo 4
• Evaluar controlabilidad y observabilidad:
X
XX
)24(y
u1
1
2/12/1
4/14/3
11 GJB-May-2015
Función de transferencia
• Si un sistema esta completamente caracterizado por su función de transferencia la descripción por variables de estado es controlable y observable.
• Si el sistema es controlable y observable está completamente caracterizado por G(s) y esta se puede emplear para análisis y diseño.
12 GJB-May-2015
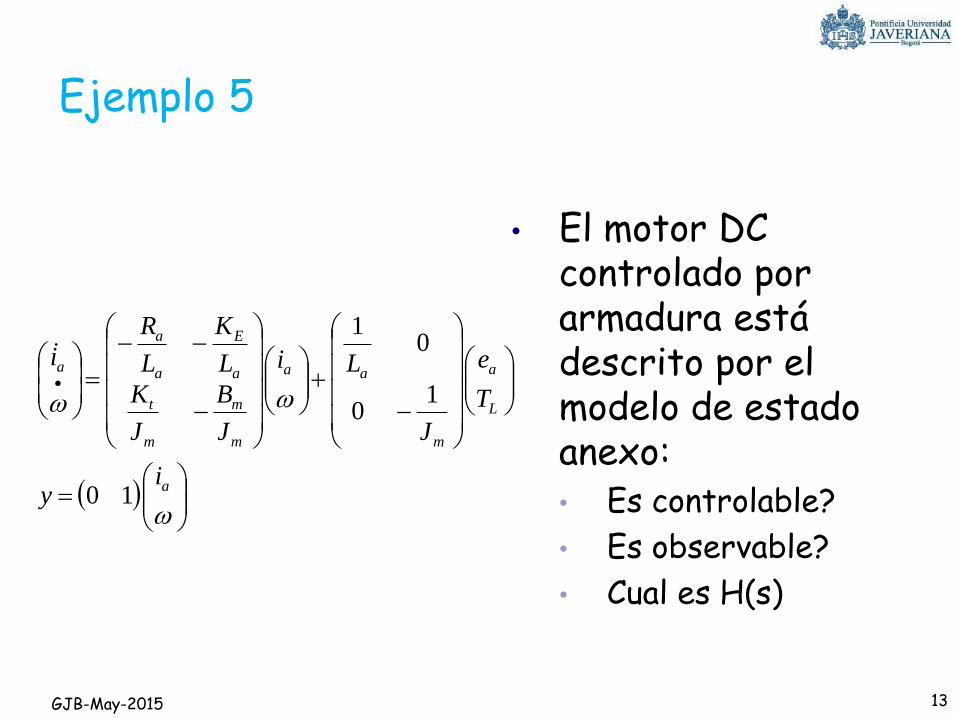
Ejemplo 5
a
L
a
m
aa
m
m
m
t
a
E
a
a
a
iy
T
e
J
Li
J
B
J
K
L
K
L
R
i
10
10
01
• El motor DC controlado por armadura está descrito por el modelo de estado anexo: • Es controlable?
• Es observable?
• Cual es H(s)
GJB-May-2015 13
Función de Sensibilidad
• Diferentes sistemas pueden tener la misma función de sistema.
• Una realización específica puede ser mas o menos sensible a la variación de parámetros.
• La función de sensibilidad mide el impacto que tiene la variación en un parámetro del sistema sobre la función de transferencia total.
• Dependiendo del parámetro que se varíe se pueden evaluar diferentes funciones de sensibilidad.
GJB-May-2015 14
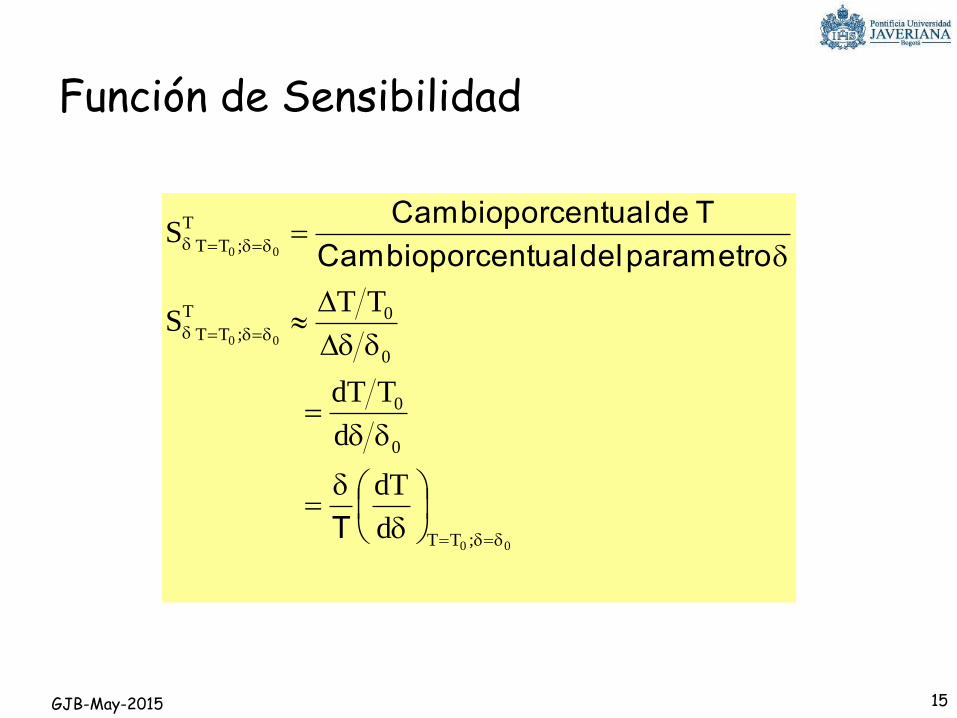
Función de Sensibilidad
GJB-May-2015 15
00
00
00
;TT
0
0
0
0
;TT
T
;TT
T
d
dT
d
TdT
TTS
S
T
parametro del porcentual Cambio
T de porcentual Cambio
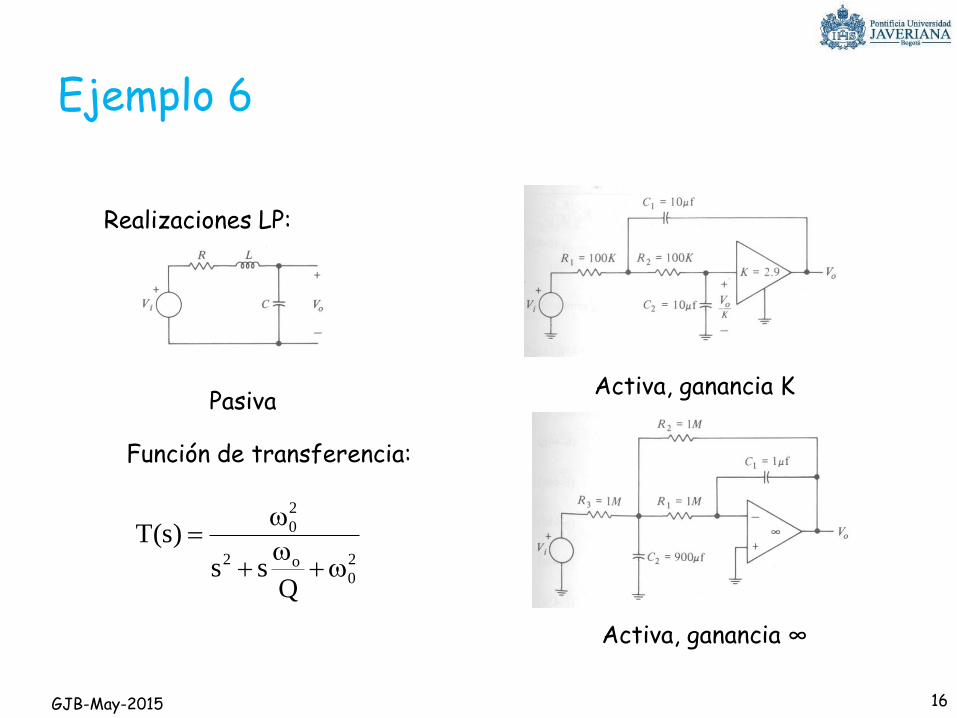
Ejemplo 6
GJB-May-2015 16
Realizaciones LP:
Función de transferencia:
2
0o2
2
0
Qss
)s(T
Pasiva Activa, ganancia K
Activa, ganancia ∞
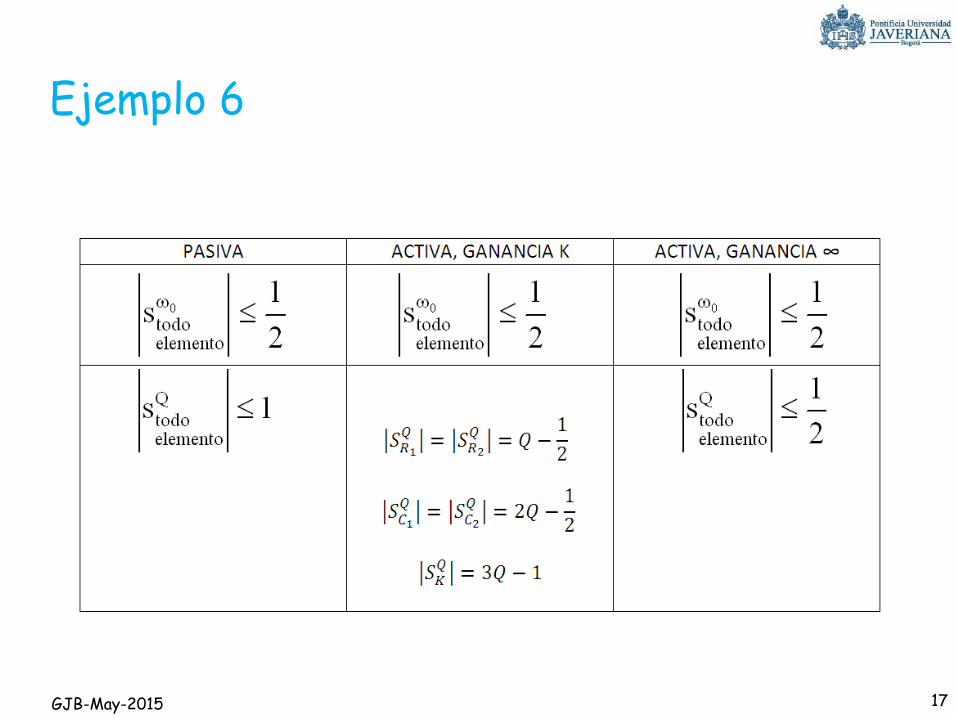
Ejemplo 6
GJB-May-2015 17
2
1s 0
elementotodo
Realimentación negativa
• Modifica significativamente: • Las características del sistema en malla
abierta.
• La respuesta en el tiempo.
• La sensibilidad a cambio de parámetros.
• El rechazo de disturbios.
• El error en estado estable.
• La respuesta en frecuencia.
• La estabilidad.
• La ganancia.
GJB-May-2015 18
Realimentación negativa y “BELL TELEPHONE”
• Telefonía usaba amplificadores a tubos, limitados por bajo ancho de banda, distorsión y ruido
• H.S. Black (1927): amplificador con realimentación negativa
• H. Nyquist (1932): teoría de estabilidad a partir de la respuesta de frecuencia
• H. Bode: establece las relaciones entre magnitud, fase y estabilidad.
19 GJB-May-2015
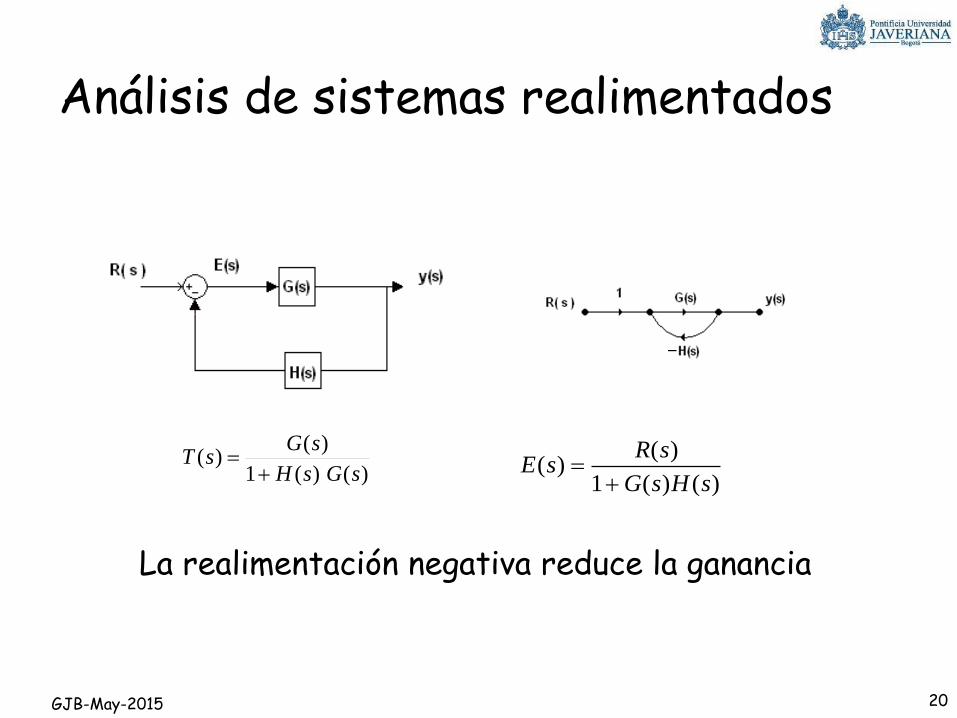
Análisis de sistemas realimentados
)()(1
)()(
sGsH
sGsT
( )
( )1 ( ) ( )
R sE s
G s H s
20 GJB-May-2015
La realimentación negativa reduce la ganancia
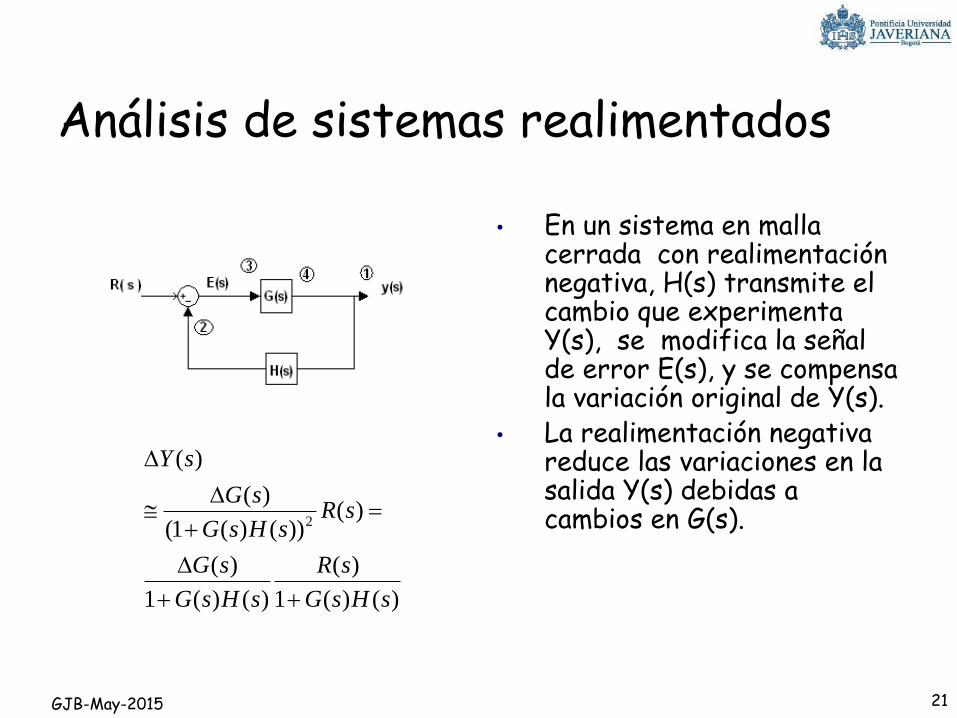
Análisis de sistemas realimentados
• En un sistema en malla cerrada con realimentación negativa, H(s) transmite el cambio que experimenta Y(s), se modifica la señal de error E(s), y se compensa la variación original de Y(s).
• La realimentación negativa reduce las variaciones en la salida Y(s) debidas a cambios en G(s).
)()(1
)(
)()(1
)(
)())()(1(
)(
)(
2
sHsG
sR
sHsG
sG
sRsHsG
sG
sY
21 GJB-May-2015
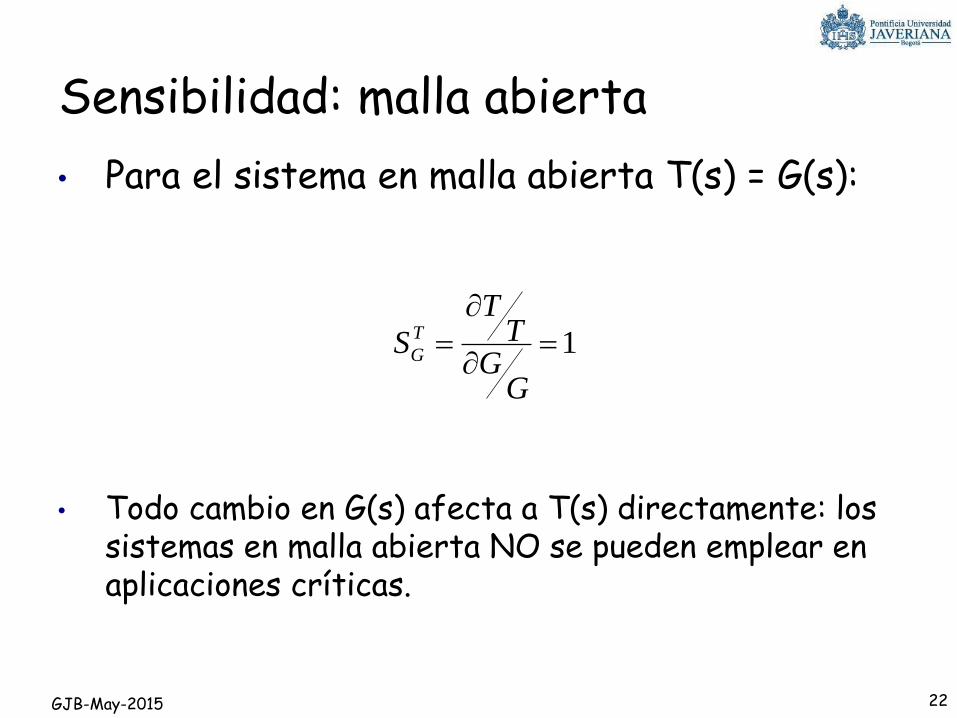
Sensibilidad: malla abierta
• Para el sistema en malla abierta T(s) = G(s):
• Todo cambio en G(s) afecta a T(s) directamente: los sistemas en malla abierta NO se pueden emplear en aplicaciones críticas.
GJB-May-2015 22
1
GG
TT
ST
G
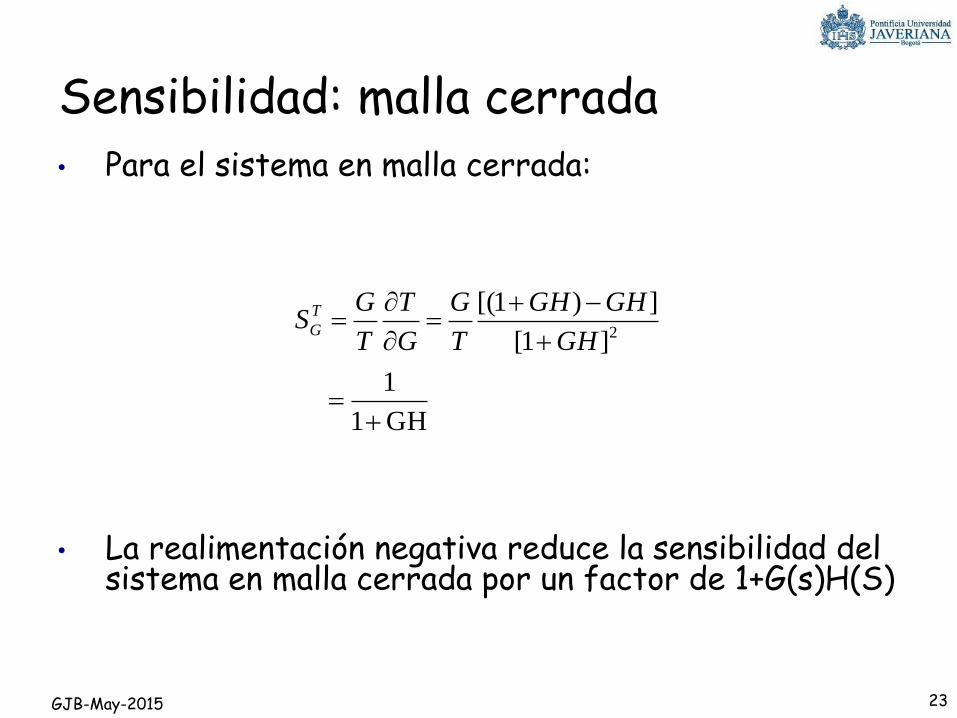
Sensibilidad: malla cerrada • Para el sistema en malla cerrada:
• La realimentación negativa reduce la sensibilidad del sistema en malla cerrada por un factor de 1+G(s)H(S)
GJB-May-2015 23
GH1
1
]1[
])1[(2
GH
GHGH
T
G
G
T
T
GST
G
Sensibilidad
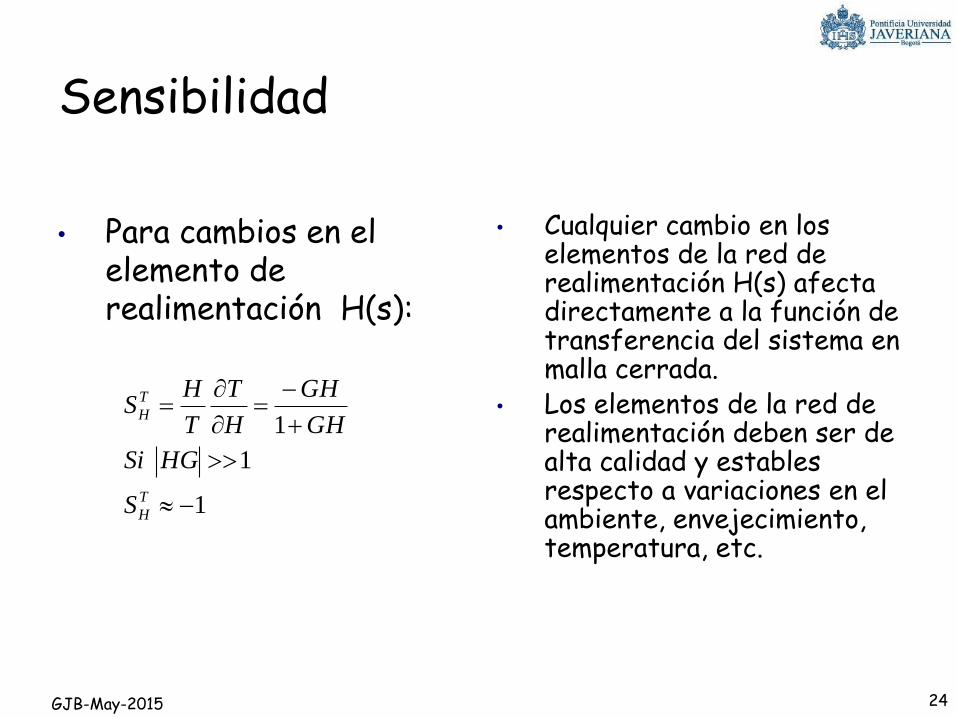
• Para cambios en el elemento de realimentación H(s):
• Cualquier cambio en los elementos de la red de realimentación H(s) afecta directamente a la función de transferencia del sistema en malla cerrada.
• Los elementos de la red de realimentación deben ser de alta calidad y estables respecto a variaciones en el ambiente, envejecimiento, temperatura, etc.
1
1
1
T
H
T
H
S
HGSi
GH
GH
H
T
T
HS
24 GJB-May-2015
Sensibilidad
• El efecto reductor de la sensibilidad producido por la realimentación negativa permite trabajar con funciones de transferencia en malla abierta G(s) construidas con componentes físicos, determinadas experimentalmente y dependiente de varios parámetros externos y reducir las variaciones de la función de transferencia en malla cerrada T(s) por medio de la realimentación negativa.
25 GJB-May-2015
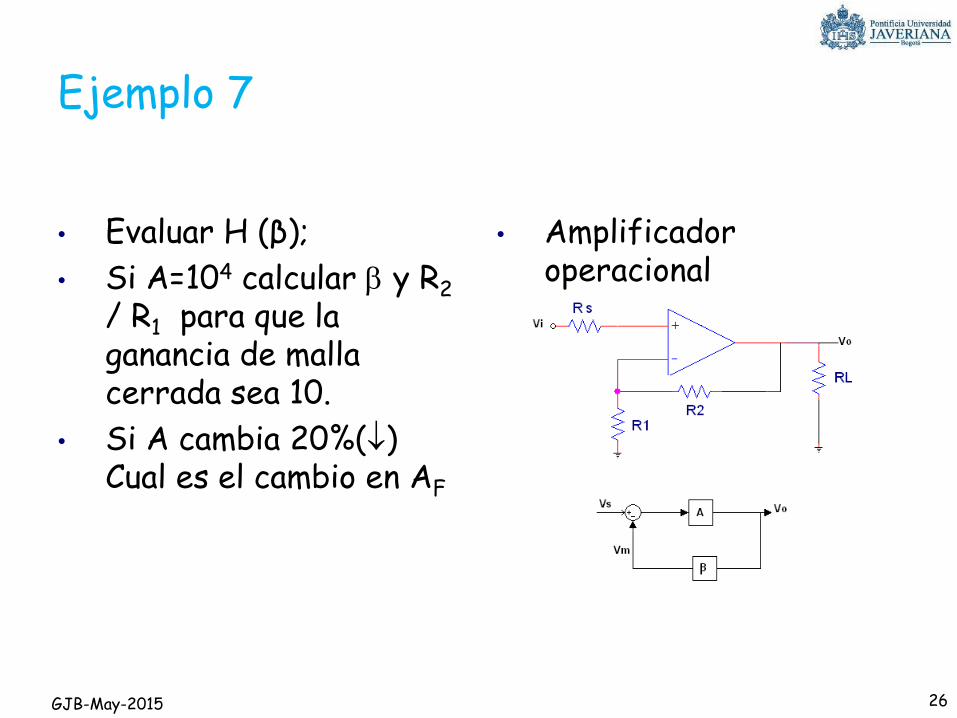
Ejemplo 7
• Evaluar H (β);
• Si A=104 calcular y R2 / R1 para que la ganancia de malla cerrada sea 10.
• Si A cambia 20%() Cual es el cambio en AF
• Amplificador operacional
26 GJB-May-2015
Ubicación de polos
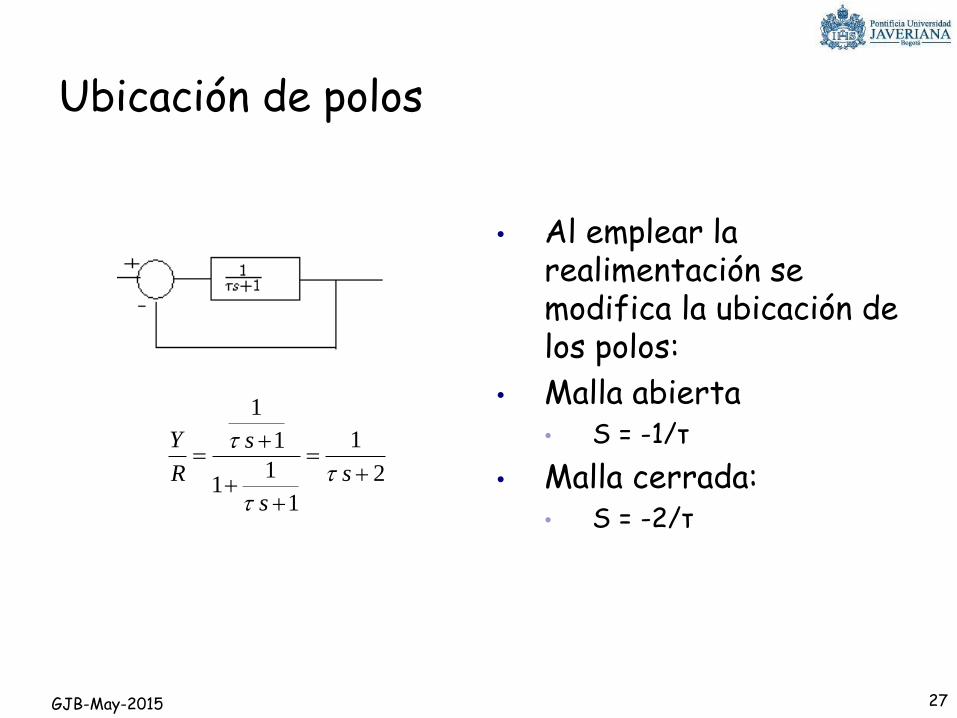
• Al emplear la realimentación se modifica la ubicación de los polos:
• Malla abierta • S = -1/τ
• Malla cerrada: • S = -2/τ
2
1
1
11
1
1
s
s
s
R
Y
27 GJB-May-2015
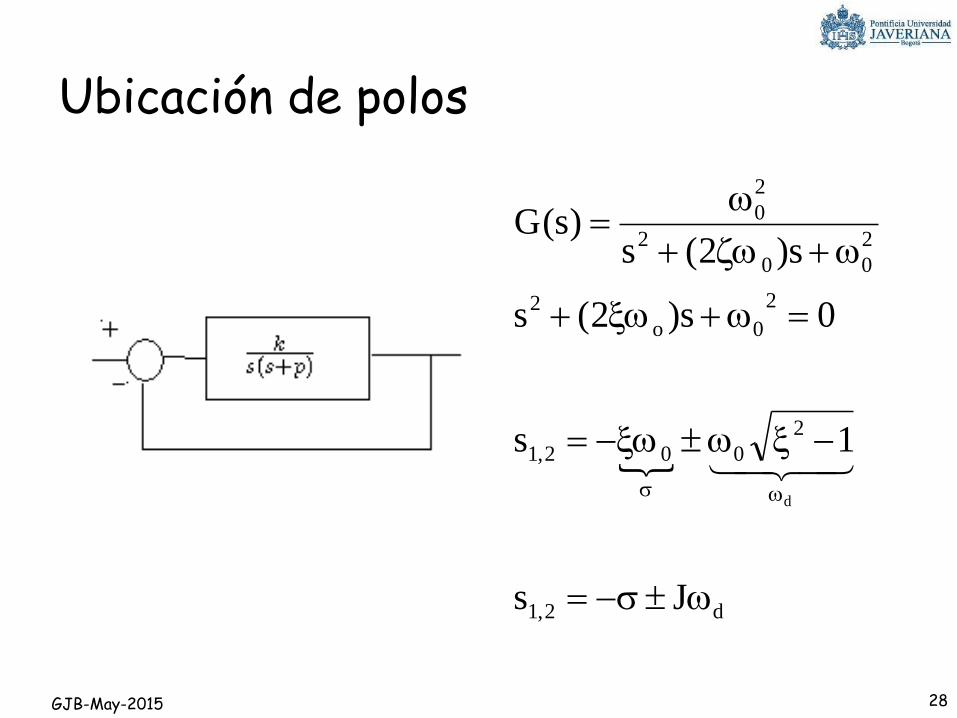
Ubicación de polos
d2,1
2
002,1
2
0o
2
2
00
2
2
0
Js
1s
0s)2(s
s)2(s)s(G
d
28 GJB-May-2015
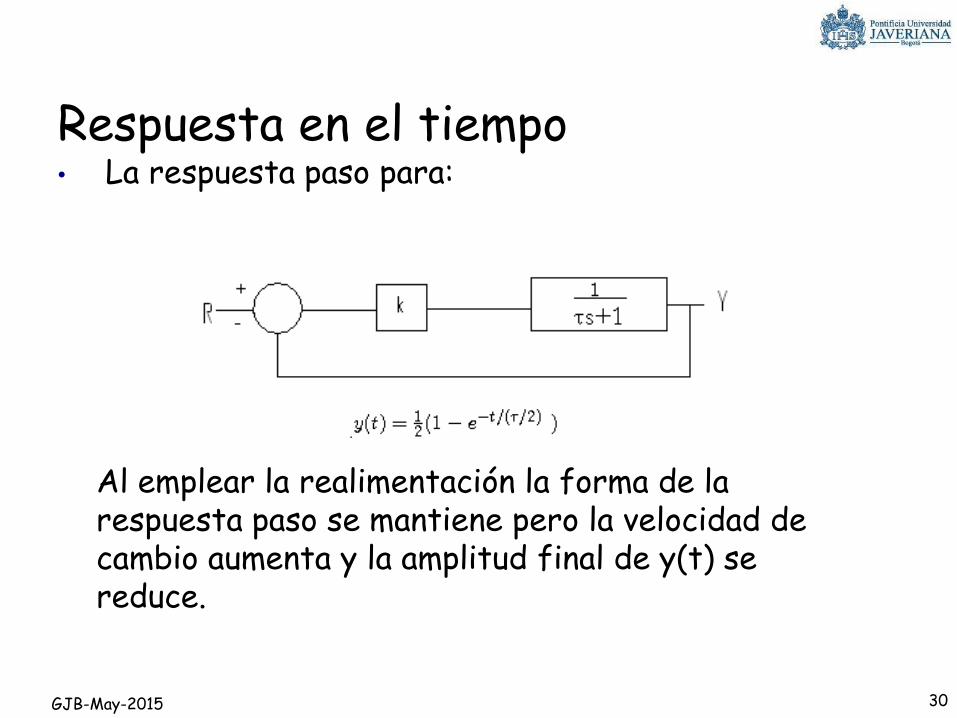
Respuesta en el tiempo • La respuesta paso para:
30 GJB-May-2015
Al emplear la realimentación la forma de la respuesta paso se mantiene pero la velocidad de cambio aumenta y la amplitud final de y(t) se reduce.
Ubicación de polos
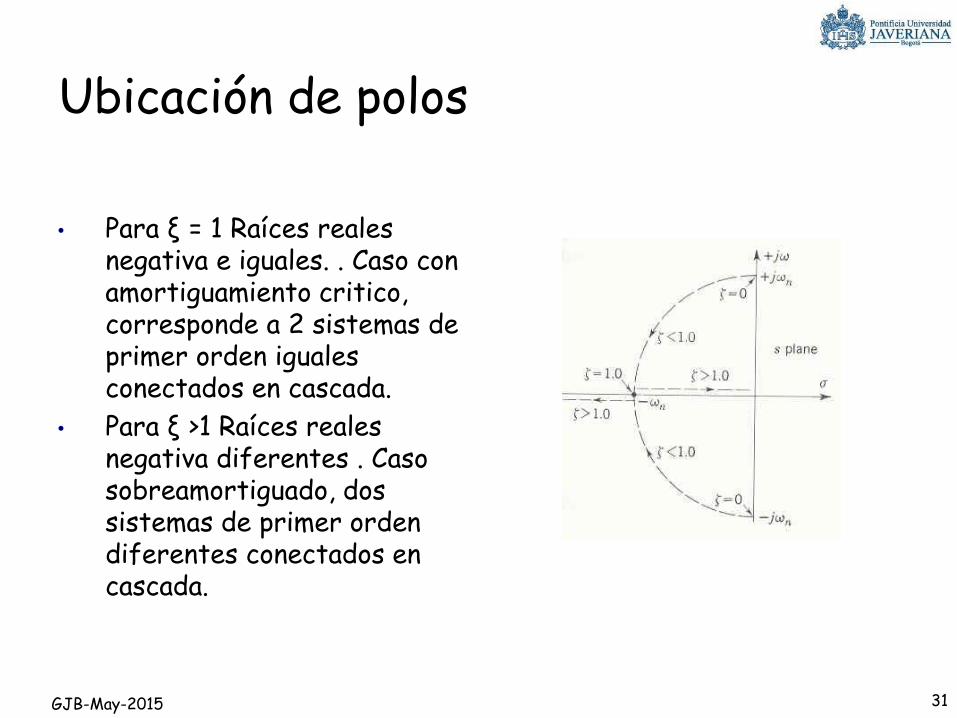
• Para ξ = 1 Raíces reales negativa e iguales. . Caso con amortiguamiento critico, corresponde a 2 sistemas de primer orden iguales conectados en cascada.
• Para ξ >1 Raíces reales negativa diferentes . Caso sobreamortiguado, dos sistemas de primer orden diferentes conectados en cascada.
31 GJB-May-2015

Ubicación de polos
• Para ξ = 0 Raíces imaginarias conjugadas, no hay amortiguación. Caso sin perdidas. (Oscilador).
• Para 0< ξ <1 Raíces complejas conjugadas. . Caso sub amortiguado.
32 GJB-May-2015
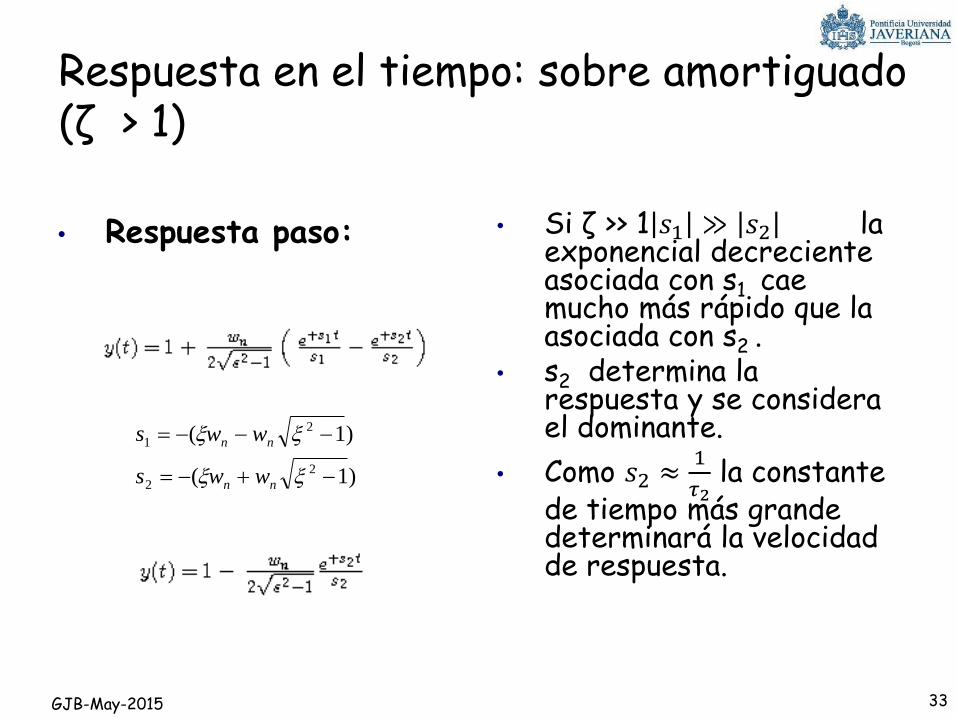
Respuesta en el tiempo: sobre amortiguado (ζ > 1) • Respuesta paso:
• Si ζ >> 1 𝑠1 ≫ 𝑠2 la exponencial decreciente asociada con s1 cae mucho más rápido que la asociada con s2 .
• s2 determina la respuesta y se considera el dominante.
• Como 𝑠2 ≈1
𝜏2 la constante
de tiempo más grande determinará la velocidad de respuesta.
)1(
)1(
2
2
2
1
nn
nn
wws
wws
33 GJB-May-2015
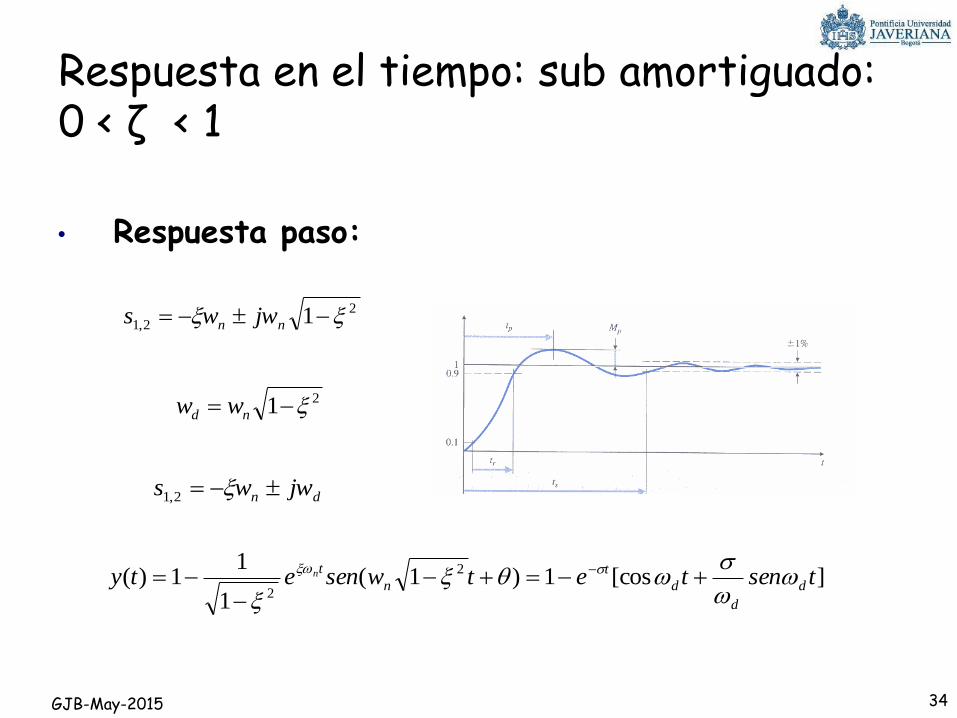
Respuesta en el tiempo: sub amortiguado: 0 < ζ < 1
• Respuesta paso:
2
2,1 1 nn jwws
21 nd ww
dn jwws 2,1
][cos1)1(1
11)( 2
2tsentetwsenety d
d
d
t
n
tn
34 GJB-May-2015
Respuesta en el tiempo: sub amortiguado: 0 < ζ < 1 • Tiempo de subida:
• Definición entre 10% al 90% se puede aproximar como:
• Definición entre 0 y 100%.
0.8 0.3 6.016.2
n
rt
2
21
1
1(tan
n
r
wt
35 GJB-May-2015
Respuesta en el tiempo: sub amortiguado: 0 < ζ < 1
• La respuesta excede a la entrada durante los primeros ciclos, y la medida de este sobrepaso esta dada por el “Porcentaje de sobrepaso” (overshoot):
• Tiempo para alcanzar el máximo:
• Valor máximo:
• Porcentaje de sobrepaso:
%100
F
Fp
V
VMPO
21 2
d
dn
p
Tt
epM 211
%10021
ePO
36 GJB-May-2015
Respuesta en el tiempo: sub amortiguado: 0 < ζ < 1 • El tiempo de establecimiento se toma como 4 veces la
constante de tiempo de las raíces dominantes de la ecuación característica:
• Cuando la banda del error se toma como ± 1% el tiempo de establecimiento es:
414
n
st
n
st
6.4
37 GJB-May-2015
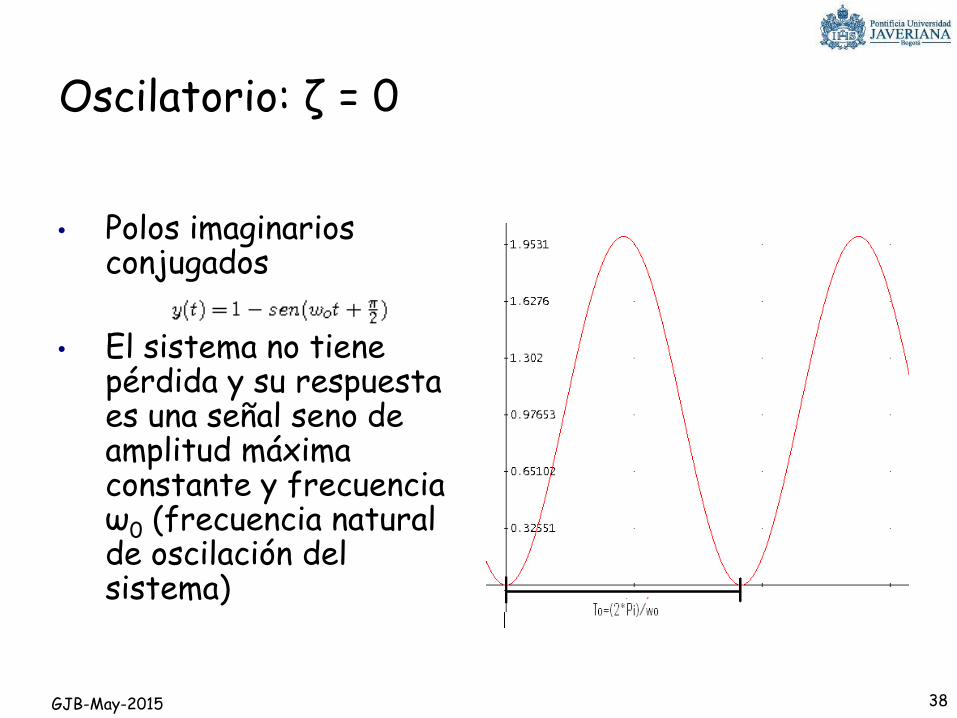
Oscilatorio: ζ = 0
• Polos imaginarios conjugados
• El sistema no tiene pérdida y su respuesta es una señal seno de amplitud máxima constante y frecuencia ω0 (frecuencia natural de oscilación del sistema)
38 GJB-May-2015
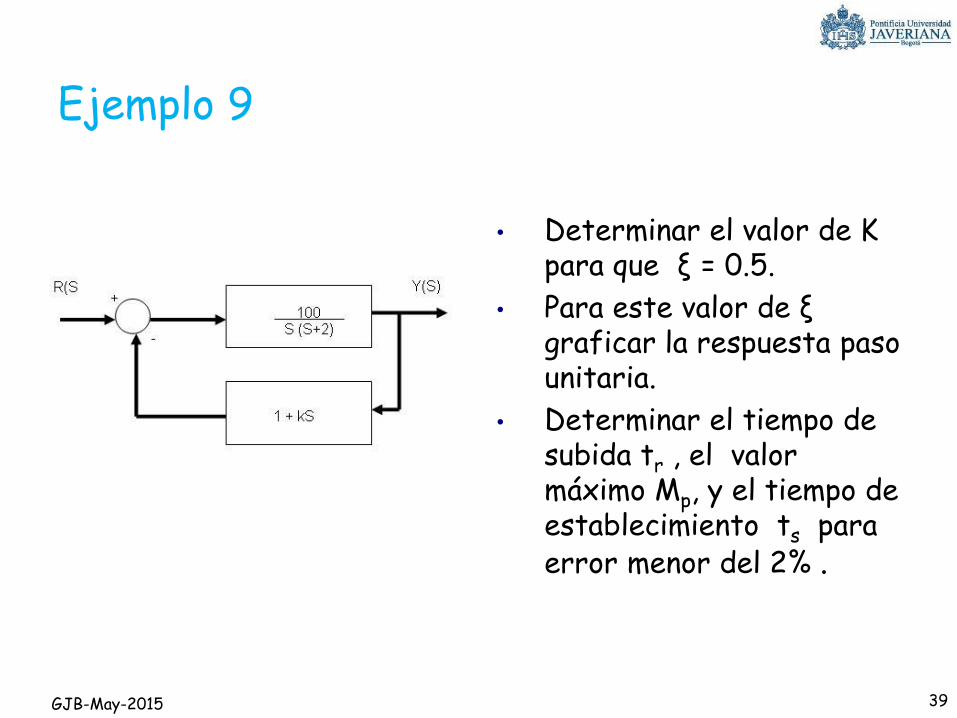
Ejemplo 9
• Determinar el valor de K para que ξ = 0.5.
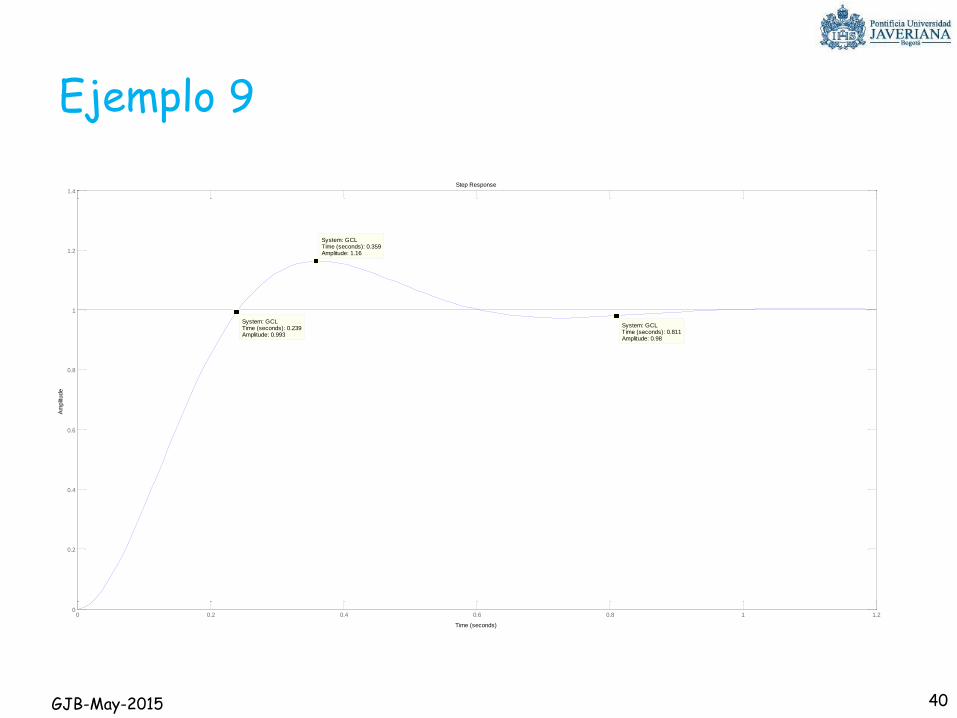
• Para este valor de ξ graficar la respuesta paso unitaria.
• Determinar el tiempo de subida tr , el valor máximo Mp, y el tiempo de establecimiento ts para error menor del 2% .
39 GJB-May-2015
Ejemplo 9
GJB-May-2015 40
0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
1.2
1.4
System: GCLTime (seconds): 0.239Amplitude: 0.993
System: GCLTime (seconds): 0.359Amplitude: 1.16
System: GCLTime (seconds): 0.811Amplitude: 0.98
Step Response
Time (seconds)
Am
plit
ude
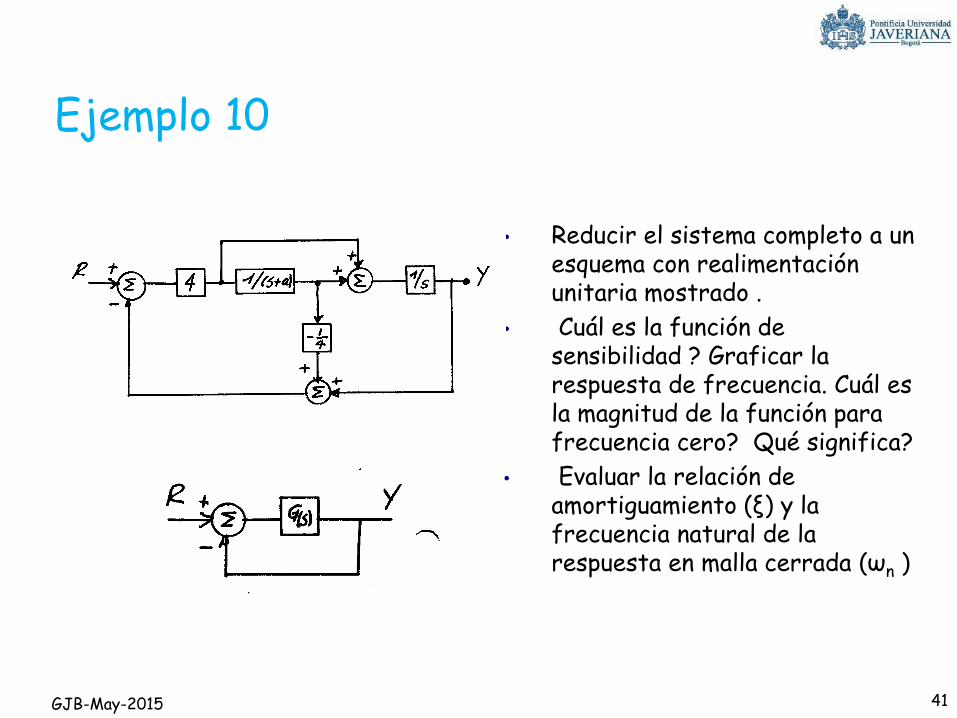
Ejemplo 10
• Reducir el sistema completo a un esquema con realimentación unitaria mostrado .
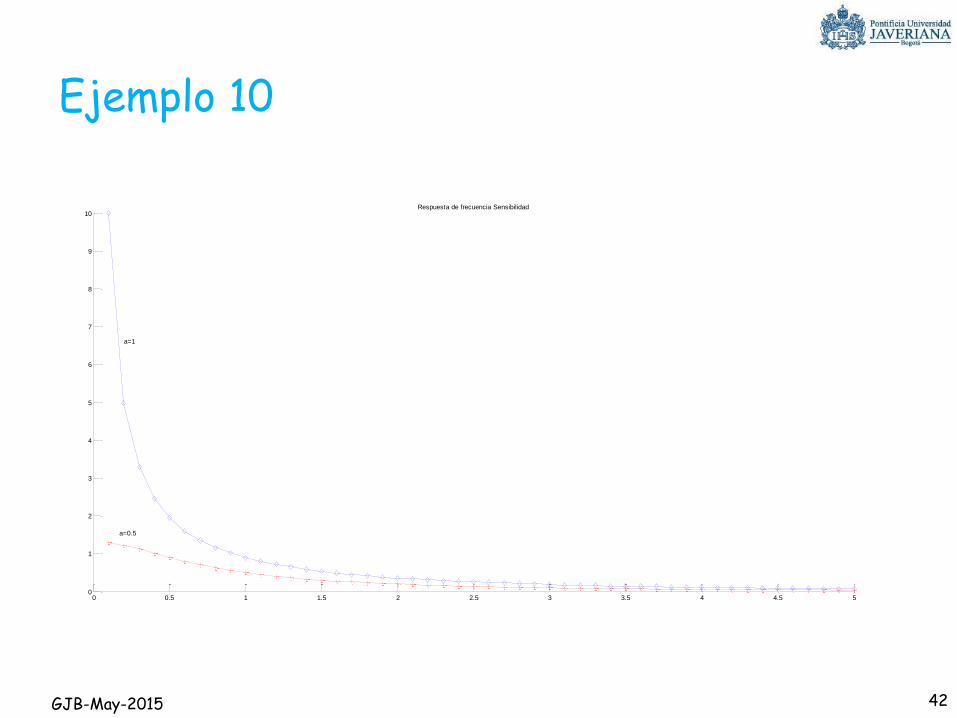
• Cuál es la función de sensibilidad ? Graficar la respuesta de frecuencia. Cuál es la magnitud de la función para frecuencia cero? Qué significa?
• Evaluar la relación de amortiguamiento (ξ) y la frecuencia natural de la respuesta en malla cerrada (ωn )
41 GJB-May-2015
Ejemplo 10
GJB-May-2015 42
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
6
7
8
9
10Respuesta de frecuencia Sensibilidad
a=1
a=0.5
Respuesta de frecuencia
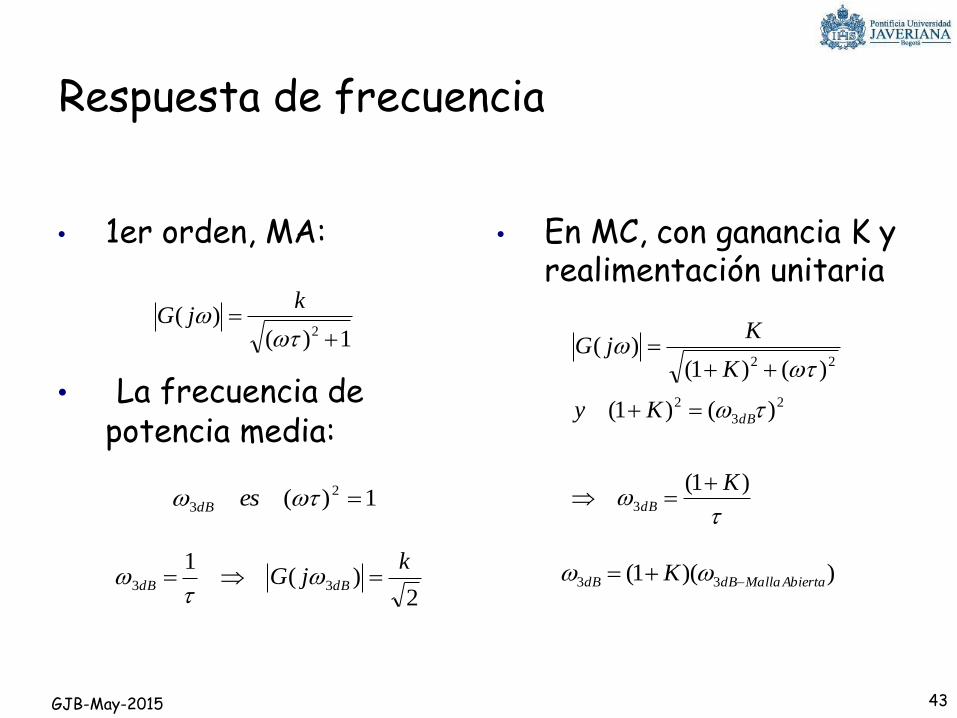
• 1er orden, MA:
• La frecuencia de potencia media:
• En MC, con ganancia K y realimentación unitaria
1)()(
2
kjG
1)( 2
3 esdB
2)(
133
kjG dBdB
)1(
)()1(
)()1()(
3
2
3
2
22
K
Ky
K
KjG
dB
dB
))(1( 33 AbiertaMalladBdB K
43 GJB-May-2015
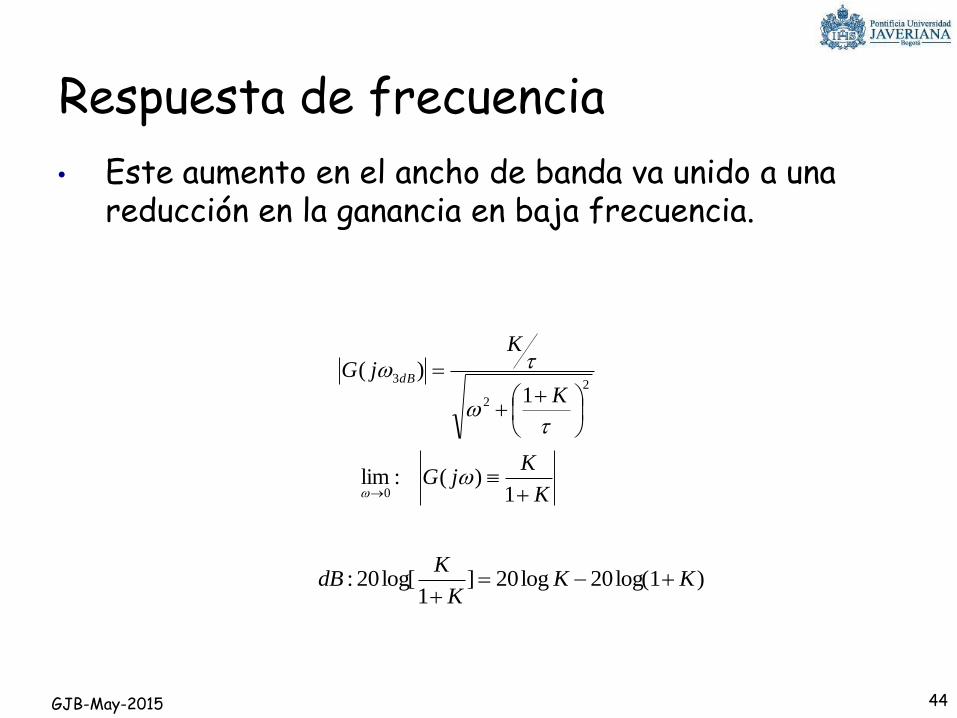
Respuesta de frecuencia
• Este aumento en el ancho de banda va unido a una reducción en la ganancia en baja frecuencia.
K
KjG
K
K
jG dB
1)(:lim
1)(
0
2
2
3
)1log(20log20]1
log[20: KKK
KdB
44 GJB-May-2015
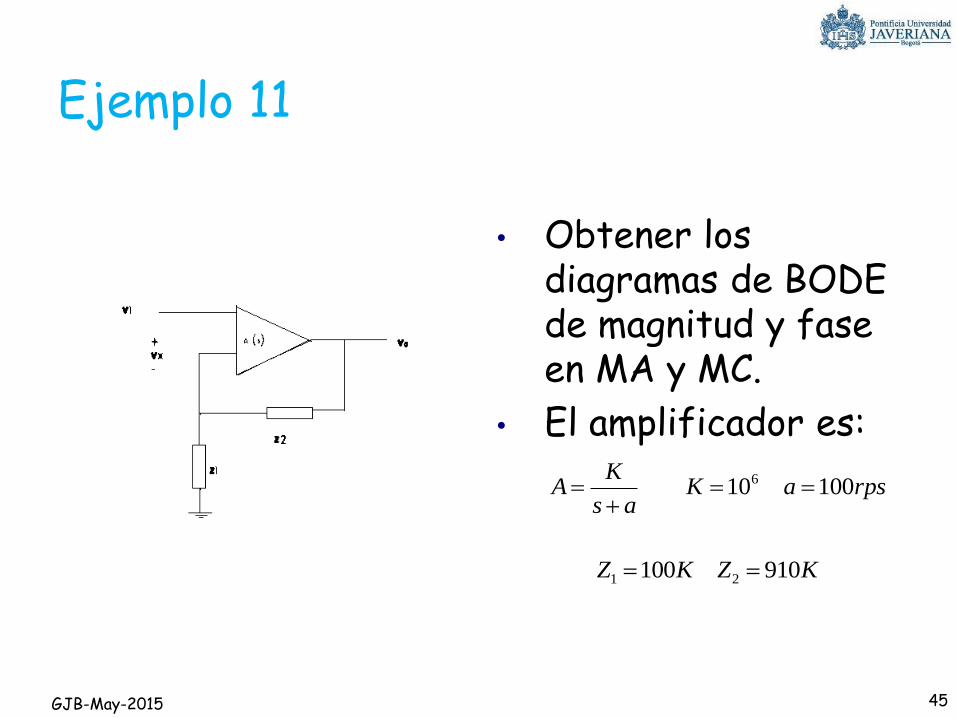
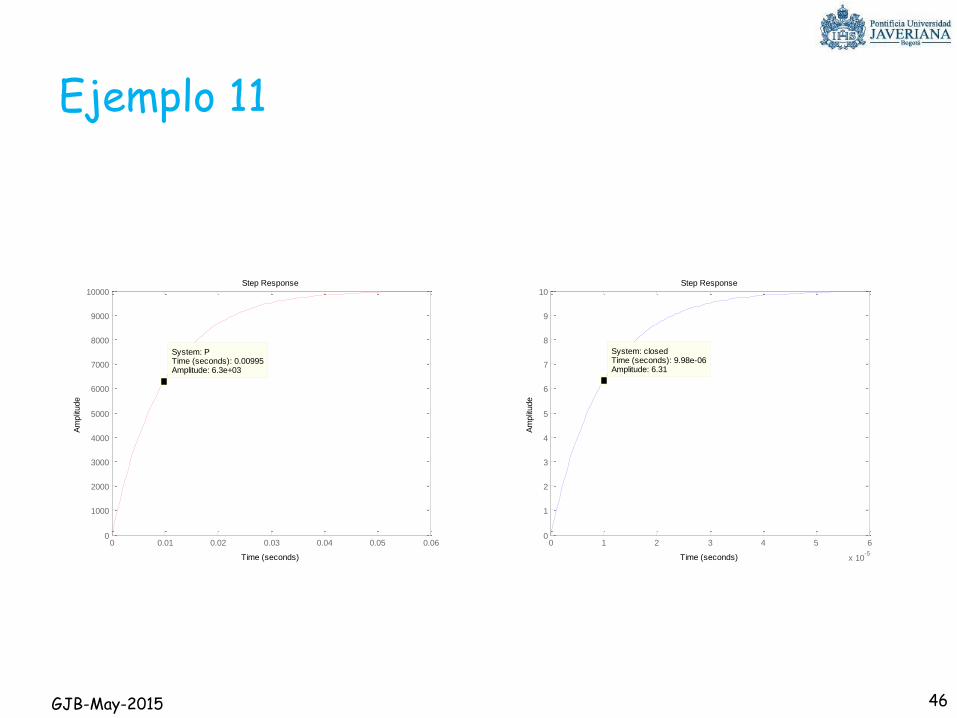
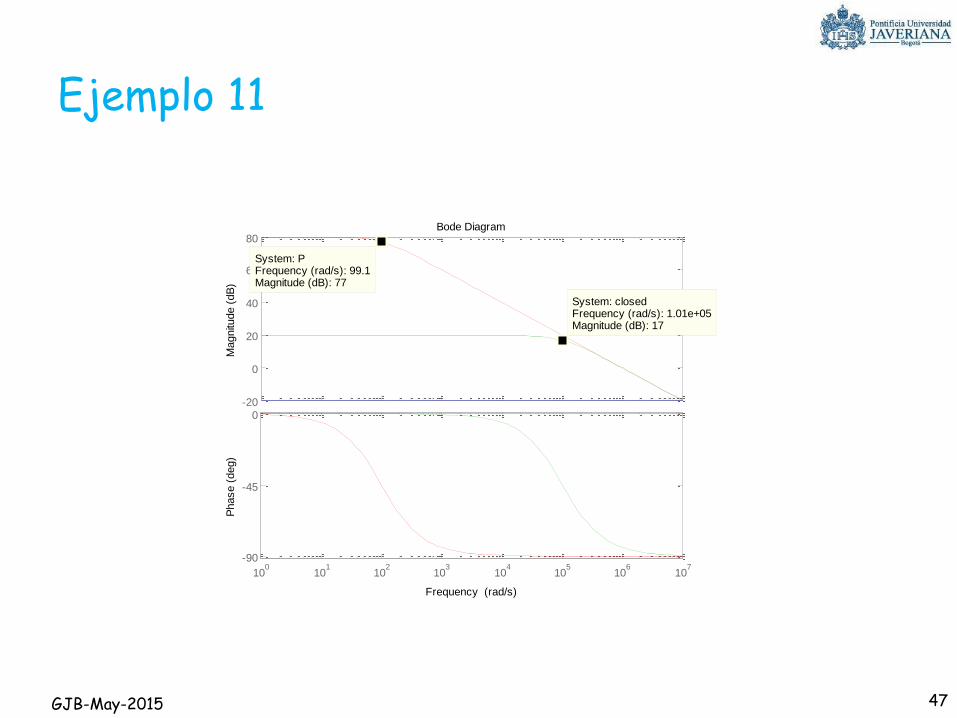
Ejemplo 11
• Obtener los diagramas de BODE de magnitud y fase en MA y MC.
• El amplificador es:
rpsaKas
KA 100106
KZKZ 910100 21
45 GJB-May-2015
Ejemplo 11
GJB-May-2015 46
0 0.01 0.02 0.03 0.04 0.05 0.060
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
System: PTime (seconds): 0.00995Amplitude: 6.3e+03
Step Response
Time (seconds)
Am
plit
ude
0 1 2 3 4 5 6
x 10-5
0
1
2
3
4
5
6
7
8
9
10
System: closedTime (seconds): 9.98e-06Amplitude: 6.31
Step Response
Time (seconds)
Am
plit
ude
47 GJB-May-2015
Ejemplo 11
100
101
102
103
104
105
106
107
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/s)
-20
0
20
40
60
80
System: PFrequency (rad/s): 99.1Magnitude (dB): 77
System: closedFrequency (rad/s): 1.01e+05Magnitude (dB): 17
Magnitu
de (
dB
)
Temas para el futuro
• Demostración y aplicaciones de Controlabilidad y observabilidad: Controles y Sistemas Lineales
• Aplicaciones realimentación: Controles y Electrónica
48 GJB-May-2015
Referencias 1. CLOSE Charles, FREDERICK Dean and NEWELL Jonathan.
Modeling and Analysis of Dynamic Systems. 3rd Edition. New York: John Wiley & Sons. 2002.
2. DORF Richard and BISHOP Robert. Modern Control Systems. 10th Edition. Upper Saddle River: Pearson Prentice Hall. 2005.
3. FRANKLIN J.D; POWELL J.D, and ENAMI-NAEINI A. Feedback control of dynamic systems. 4th ed. Upper Saddle River, New Jersey : Prentice Hall, 2002.
49 GJB-May-2015







