
SIMODRIVE 611 Sistema analógico
Instrucciones de puesta en marcha Edición 10.2000
Documentación para el fabricante/service
Sistema de regulación a transistorespara accionamientos de avance de c.a. y accionamientos de cabezal de c.a.


Válido para
Serie 6SN11–
Edición 10.00
Sistema de regulacióna transistores para accionamientosde avance de c.a. y accionamientosde cabezal de c.a.
SIMODRIVE 611 Sistema analógico
Instrucciones de puesta en marcha
Prólogo
Generalidades AL
Alimentación de red NE
Módulos de avance VS
Módulos de avanceRegulación a resolver VR
Módulos de cabezal HS
Módulos de motor asíncrono AM
Repuestos ES
Apéndice A
Referencia rápida NE/VS
Referencia rápida VR
Referencia rápida HS
Referencia rápida AM
Índice general

Documentación SIMODRIVE
Clave de ediciones
Las ediciones que figuran a continuación han aparecido antes que la presente.
La columna ”Observación” indica que el estado de las ediciones mediante una letra.
Significado del estado en la columna ”Observación”:
A.... Documentación nuevaB.... Reimpresión con nuevo Nº de pedidoC.... Edición reelaborada con versión nueva.
Si el contenido técnico expuesto en una página se ha modificado respecto a la ediciónanterior, esto se señala modificando la edición que aparece en la cabecera de la páginacorrespondiente.
Edición Nº de pedido Observación07.94 6SN1197–0AA60–0EP0 A
10.94 6SN1197–0AA60–0EP1 C
12.94 6SN1197–0AA60–0EP2 C
03.96 6SN1197–0AA60–0EP3 C
04.97 6SN1197–0AA60–0EP4 C
10.00 6SN1197–0AA60–0EP6 C
Este libro forma parte de la documentación en CD–ROM (DOCONCD) (en inglés)
Edición Nº de pedido Observación
10.00 6FC5298–6CA00–0BG0 C
Marcas
SIMATIC, SIMATIC HMI, SIMATIC NET, SIROTEC, SINUMERIK y SIMODRIVE son marcasregistradas de Siemens AG. Las demás denominaciones utilizadas en esta publicación pueden ser marcascuyo uso por parte de terceros para sus propios fines puede violar los derechos de sus propietarios.
Más información se encuentra en Internet bajo:http://www.ad.siemens.de/simodrive
Documentación confeccionada con Interleaf V 7
Está prohibida la divulgación y la reproducción de este documento y de sucontenido salvo en caso de autorización expresa. Los infractores quedanobligados a la indemnización por daños y perjuicios. Se reservan todos losderechos, en particular para el caso de concesión de Patente o de Modelode Utilidad.
Siemens AG 2000. All rights reserved.
El control permite ejecutar más funciones que las indicadas en estadescripción. Sin embargo, no se pueden exigir dichas funciones al efectuarel suministro o servicios postventa.
Hemos verificado la coincidencia entre el contenido de este impreso y elsoftware y el hardware descritos. Como siempre se puede deslizar algúnerror involuntario, no podemos garantizar la absoluta coincidencia. Noobstante, se comprueba regularmente la información aquí contenida; lascorrecciones necesarias se incluirán en la próxima edición. En estecontexto agradecemos cualquier sugerencia de mejora.
Sujeto a cambios técnicos sin previo aviso.
Siemens–AktiengesellschaftNº de pedido 6SN1197–0AA60–0EP6Printed in the Federal Republic of Germany
3ls

i Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Prefacio
El presente documento forma parte de la documentación desarrollada paraSIMODRIVE. Cualquier de los documentos pueden obtenerse por separado.
En las delegaciones, sucursales o agencias Siemens está disponible el índicede la documentación con todos los folletos, catálogos, panorámicas, descripcio-nes abreviadas, instrucciones y descripciones técnicas con su número y lugarde pedido así como su precio.
Por motivos de claridad expositiva, esta documentación no detalla todas lasinformaciones relativas a las variantes completas del producto descrito nipuede considerar todos los casos imaginables de la instalación, de la explota-ción ni del mantenimiento.
Si precisa informaciones complementarias o si surgen problemas específicosno tratados con el suficiente detalle en estas Instrucciones, contactar con laagencia o sucursal de Siemens más próxima, donde contestarán a sus pregun-tas.
También queremos hacer notar que el contenido de estas Instrucciones noforma parte de un convenio, promesa o relación jurídica pasada o en vigor, oque la deba modificar.
El contrato de compra es el único documento que especifica las obligacionesde Siemens, y además el único que incluye la reglamentación válida sobre ga-rantía. La presente documentación ni amplía ni limita las estipulaciones de ga-rantía fijadas contractualmente.

10.00
ii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Personal cualificado
En el sentido de esta documentación y de las advertencias que figuran en elpropio producto son aquellas personas familiarizados con el montaje, instala-ción, puesta en marcha y explotación del producto, y que disponen de las cuali-ficaciones acordes con sus actividades como p. ej.:
Formación o instrucción o aprobación para conectar y desconectar, poner atierra y marcar circuitos y aparatos de acuerdo a las normas de seguridad.
Formación o instrucción de acuerdo a las normas de seguridad en el mante-nimiento y uso de los equipos de seguridad adecuados.
Formación en Primeros Auxilios
Peligro
Esta advertencia significa que se producirán la muerte, lesiones graves odaños materiales considerables si no se toman las correspondientes medidasde precaución.
Precaución
Esta advertencia significa que se pueden producir la muerte, lesiones graveso daños materiales considerables si no se toman las correspondientes medi-das de precaución.
Atención
Esta advertencia (con triángulo de aviso) significa que se pueden producirlesiones leves si no se toman las correspondientes medidas de precaución.
Atención
Esta advertencia (sin triángulo de aviso) significa que se pueden producirdaños materiales si no se toman las correspondientes medidas de precaución.
Atención
Esta advertencia significa que se puede producir un suceso o un estado nodeseado si no se observan las correspondientes indicaciones.
Definiciones
10.00
10.00
iii Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Importante
Este símbolo aparece en la documentación siempre que sea necesario obser-var un contexto o información importante.
Indicación
En el sentido de esta documentación es una información importante sobre elproducto o una parte de la documentación sobre la que se desea llamar parti-cularmente la atención.
Precaución
Durante el funcionamiento de los equipos eléctricos hay piezas de los mismosque están forzosamente bajo tensión peligrosa.
Por ello, si no se observan las advertencias pueden producirse lesiones gra-ves o daños materiales.
La puesta en marcha de este equipo sólo deberá encomendarse a personaladecuadamente cualificado.
Dicho personal deberá estar familiarizado con todas las advertencias y medi-das de mantenimiento enunciadas en estas Instrucciones.
El funcionamiento correcto y seguro de este equipo presupone un transporte,un almacenamiento, una instalación y un montaje conforme a las reglas de labuena ingeniería, así como un manejo y mantenimiento rigurosos.
Al trabajar en la instalación pueden producirse movimientos peligrosos en losejes.
Indicación
Al montar los cables de conexión es preciso atender
a no dañarlos
a que no queden sometidos a tensión mecánica y
a que no puedan ser alcanzados por piezas en rotación.
10.00

10.00
iv Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
El equipo SIMODRIVE no debe conectarse a una red protegida con un inter-ruptor diferencial (esta limitación es admisible según DIN VDE 0160 / 05.88,apt. 6.5).En estado operativo está garantizada la protección contra contactosdirectos de piezas bajo tensión, por lo que el equipo es adecuado para su em-plazamiento en locales de servicio de tipo general (DIN VDE 0558, p. 1 / 07.87,apt. 5.4.3.2.4)
Conforme a DIN VDE 0160 / 05.88 se realiza en todos los aparatos SIMO-DRIVE en la comprobación de piezas en la empresa del fabricante tambiénuna prueba de alta tensión. En la prueba de alta tensión para el equipamientoeléctrico de máquinas industriales se tienen que retirar o desembornar todaslas conexiones para evitar daños en componentes electrónicos sensibles delaparato SIMODRIVE (admisible según DIN VDE 0113 / 06.93, parte 1, apar-tado 20.4).
Precaución
Está prohibida la puesta en marcha de este equipo hasta que pueda demos-trarse que la máquina en la que se montan los componentes aquí descritoscumple lo especificado en el Directiva 89/392/CEE.
Precaución
Para evitar peligros y daños es necesario observar lo indicado en las instruc-ciones y demás documentación suministrada con el equipo.
Para las ejecuciones de variantes especiales de las máquinas y equiposrige lo indicado en los catálogos y ofertas.
También es necesario considerar los reglamentos y prescripciones de vali-dez nacional, local y específicas del explotador de la instalación.
¡Para realizar cualquier tipo de trabajo es necesario desconectar la tensiónen toda la instalación!
Precaución
Antes de poner en marcha el SIMODRIVE 611 Sistema analógico es necesarioverificar que el cable al captador no tenga ningún tipo de defecto a tierra.En caso de defecto a tierra, se pueden producir movimientos incontrolados encargas de tracción (p. ej., eje con carga gravitatoria).Esto ya no sucede a partir de la ref. 6SN1118–0D2–0AA0, versión B.
10.00

10.00
v Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Componentessensibles a cargas electrostáticas
ESD son elementos, circuitos integrados o módulos que pueden sufrir dañosdurante el manejo, la comprobación y el transporte como consecuencia decampos o descargas electrostáticos. La sigla en inglés ESDS significa Electro-Static Discharge Sensitive Devices.
Manejo de módulos ESD:
¡En el manejo de componentes sensibles a cargas electrostáticas se tieneque prestar atención a una buena puesta a tierra de personas, puesto detrabajo y embalaje!
Básicamente, los módulos electrónicos sólo se deberían tocar si resultainevitable para los trabajos a realizar en ellos.
Sólo deben tocarse los componentes si:
– la persona está puesta a tierra continuamente a través de una pulseraantiestática,
– la persona lleva zapatos antiestáticos, o tiras de puesta a tierra en elcalzado, y el lugar de trabajo tiene suelo antiestático.
Los módulos sólo se deben depositar sobre bases conductoras (mesa conrecubrimiento antiestático, gomaespuma conductora antiestática, bolsas deembalaje antiestáticas, contenedor de transporte antiestático).
Los módulos no deberán estar en la proximidad de terminales de pantalla,monitores o televisores (separación mínima de la pantalla > 10 cm).
Los módulos no deben entrar en contacto con sustancias altamente aislan-tes y fáciles de cargar como, p. ej., láminas de plástico, revestimientos ais-lantes de mesas, ropa de fibras sintéticas, etc.
Sólo se deben efectuar mediciones en los módulos si
– el instrumento está puesto a tierra (p. ej., a través del conductor de pro-tección) o
– antes de la medición con un instrumento provisto de con aislamientogalvánico ya que la cabeza de medición se descarga brevemente (p.ej., tocando una carcasa de control metálica desnuda).
Los avances de regulación sólo se deben tocar en la placa frontal
Indicación
Para la puesta en servicio de los módulos de cabezal y de motor asíncronoestá disponible un software de puesta en servicio.
Referencia del software de puesta en servicio: 6SN1153–2AX10–AB
Referencia de la documentación: 6SN1197–0AA30–0P
Indicaciones ESD
10.00

10.00
vi Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
SINUMERIK y SIMODRIVE
Aumento de la productividad gracias a una puesta en servicio rápida y segura
La electrónica industrial de alta calidad – como en el presente caso – exige elcorrespondiente cuidado en el manejo. La evaluación regular de nuestra mer-cancía de devolución deja constatar algunos errores frecuentes cuya causa setiene que buscar también en el manejo durante la puesta en servicio en labúsqueda de averías.
La siguiente lista de chequeo pretende ayudarle en la perfecta puesta en servi-cio de los componentes suministrados por nuestra empresa y garantizar unelevado grado de disponibilidad en su producto.
Al manipular los componentes se observan las medidas de protección paraESD.
Todos los tornillos están apretados con el par de apriete prescrito. Cuidaresto especialmente en las atornilladuras del circuito intermedio (par deapriete 1,8 Nm).
Todos los conectores están enchufados correctamente y están enclavadoso atornillados.
El componente de regulación está atornillado en el módulo de potencia.
Se observa el orden de sucesión para la conexión indicado en las instruc-ciones para proyecto.
Si el aparato se desconecta y reconecta con una frecuencia excesiva, sebloquea la conexión de carga del circuito intermedio. El circuito intermediosólo se puede volver a cargar al cabo de un tiempo de enfriamiento de algu-nos minutos con desconexión de la red.
¿Hay contactores de red o del motor en el convertidor? Éstos sólo se de-sconectan de la corriente.
Todos los componentes están puestos a tierra y todas las pantallas estánconectadas. La conexión X131 está puesta a tierra.
Se consideró la capacidad de carga de la fuente de alimentación central.
En las barras del circuito intermedio sólo se puede descargar con unmínimo de 10 Ω.
Se utiliza el software adecuado al aparato.
¿Se utilizan componentes OEM (tarjeta ISA/PCMCIA)? Su consumo de cor-riente se sitúa dentro de la especificación.
Los monitores CRT no están expuestos a campos magnéticos (p. ej., bobi-nas de fuente de alimentación).
En la puesta en servicio y búsqueda de averías, se tiene que procedersiempre por módulos.Esto significa: Primero poner en marcha el aparato central o el módulo dered, después conectar y poner en marcha sucesivamente los componentes.
Manejo
Lista de chequeo
10.00

10.00
vii Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Los equipos están diseñados para operar en las condiciones mecánicas,climáticas y eléctricas definidas. Todos los valores límite no se deben sobre-pasar en el servicio y transporte. Observar especialmente:
– Condiciones de la red
– Nivel de contaminación ambiental
– Gases peligrosos para el funcionamiento
– Condiciones climáticas ambientales
– Almacenamiento/transporte
– Resistencia al impacto
– Resistencia a oscilación
– Temperatura ambiente
Información más detallada se encuentra en las instrucciones para proyecto ylas instrucciones de puesta en marcha de nuestros productos.
Más información
10.00

10.00
viii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
10.00
Espacio para sus notas
10.00

AL
AL–i Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Generalidades (AL)
1 Combinaciones permitidas de módulos de potencia yunidades de regulación enchufables AL/1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

AL
10.00
AL–ii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Espacio para sus notas

AL
10.00
AL/1-3 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Combinaciones permitidas de módulosde potencia y unidades de regulación en-chufables
Tabla 1-1 Lista para seleccionar el ajuste de los reguladores de intensidad en función de las intensidades resultan-tes en la parte de potencia
Componentes SIMO-DRIVE 611
Reg
ulac
ión
VS
A,
anal
ógic
a1
eje,
inte
rfas
e es
tánd
ar
6SN
1118
–0A
A11
–0A
A
Reg
ulac
ión
VS
A,
anal
ógic
a1
eje,
inte
rfas
e es
tánd
ar
6SN
1118
–0A
D11
–0A
A
Reg
ulac
ión
VS
A,
anal
ógic
a2
ejes
, in
terf
ase
está
ndar
6SN
1118
–0A
E11
–0A
A
Reg
ul.
reso
lver
VS
A,
anal
ógic
a
6SN
1118
–0B
J11–
0AA
0
1 ej
e, in
terf
ase
está
ndar
Reg
ul.
reso
lver
VS
A,
anal
ógic
a
6SN
1118
–0B
K11
–0A
A0
2 ej
es,
inte
rfas
e es
tánd
ar
Reg
ulac
ión
HS
A,
anal
ógic
asi
n si
stem
a de
med
ida
dire
cto
6SN
1121
–0B
A11
–0A
A0
Reg
ulac
ión
HS
A,
anal
ógic
asi
st.
de m
edid
a di
r., s
eñ. T
TL
6SN
1121
–0B
A12
–0A
A0
Reg
ulac
ión
HS
A,
anal
ógic
asa
lida
de p
osic
ión
exte
rna
6SN
1121
–0B
A13
–0A
A0
Reg
ulac
ión
AM
, an
alóg
ica
cons
igna
s fij
as,
pot.
mot
oriz
.6S
N11
22–0
BA
11–0
AA
0
Reg
ulac
ión
AM
, an
alóg
ica
vel.
anal
óg.,
t. fij
a, p
ot.
mot
.
6SN
1122
–0B
A12
–0A
A0
Reg
ulac
ión
HS
A,
anal
ógic
a
6SN
1121
–0B
A11
–0A
A1
Reg
ulac
ión
AM
, an
alóg
ica
6SN
1122
–0B
A11
–0A
A1
Módulo de ajuste, VSAanalógica confortable
6SN1114–0AA01–0AA0
necesaria _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____
Opción cabezal VSAanalógica confortable
6SN1114–0AA02–0AA
posible _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____
Módulo de potencia 8A
6SN112–1AA0–0HA
VSA:4/8A
VSA:4/8A
_____ VSA–R:3/6A
_____ _____ _____ _____ AM:3/3/3 A
AM:3/3/3 A
_____ AM:3/3/3 A
Módulo de potencia 15A
6SN112–1AA0–0AAVSA:7,5/15A
VSA:7,5/15A
_____ VSA–R:5/10A
_____ _____ _____ _____ AM:5/5/8 A
AM:5/5/8 A
_____ AM:5/5/8 A
Módulo de potencia 25A
6SN112–1AA0–0BAVSA:12,5/25A
VSA:12,5/25A
_____ VSA–R:9/18A
_____ _____ _____ _____ AM:8/10/16A
AM:8/10/16A
_____ AM:8/10/16A
Módulo de potencia 50A
6SN112–1AA0–0CA
VSA:25/50A
VSA:25/50A
_____ VSA–R:18/36A
_____ HSA:24/32/32A
HSA:24/32/32A
HSA:24/32/32A
AM:24/32/32A
AM:24/32/32A
HSA:24/32/32A
AM:24/32/32A
Módulo de potencia 80A
6SN112–1AA0–0DA
VSA:40/80A
VSA:40/80A
_____ VSA–R:28/56A
_____ HSA:30/40/51A
HSA:30/40/51A
HSA:30/40/51A
AM:30/40/51A
AM:30/40/51A
HSA:30/40/51A
AM:30/40/51A
Módulo de potencia 120A
6SN112–1AA0–0GA
_____ _____ _____ _____ _____ HSA:45/60/76A
HSA:45/60/76A
HSA:45/60/76A
AM:45/60/76A
AM:45/60/76A
HSA:45/60/76A
AM:45/60/76A
Módulo de potencia 108A
6SN112–1AA0–0LA_____ _____ _____ _____ _____ HSA:
45/60/76AHSA:45/60/76A
HSA:45/60/76A
AM:45/60/76A
AM:45/60/76A
HSA:45/60/76A
AM:45/60/76A
Módulo de potencia 160A
6SN112–1AA0–0EAVSA:80/160A
VSA:80/160A
_____ _____ _____ HSA:60/80/102A
HSA:60/80/102A
HSA:60/80/102A
AM:60/80/102A
AM:60/80/102A
HSA:60/80/102A
AM:60/80/102A
Módulo de potencia 200A
6SN112–1AA0–0FAVSA:100/200A
VSA:100/200A
_____ _____ _____ HSA:85/111/127A
HSA:85/111/127A
HSA:85/111/127A
AM:85/111/127A
AM:85/111/127A
HSA:85/111/127A
AM:85/111/127A
Módulo de potencia 200AConexión de manguera
6SN112–1AA0–0FA
VSA:100/200A
VSA:100/200A
_____ _____ _____ HSA:85/110/127A
HSA:85/110/127A
HSA:85/110/127A
AM:85/110/127A
AM:85/110/127A
AM:85/110/127A
AM:85/110/127A
Generalidades (AL)1 Combinaciones permitidas de mód. de potencia y unidades de regulación enchufables
1

AL
10.00
AL/1-4 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-1 Lista para seleccionar el ajuste de los reguladores de intensidad en función de las intensidades resultan-tes en la parte de potencia
Componentes SIMO-DRIVE 611
Reg
ulac
ión
AM
, an
alóg
ica
Reg
ulac
ión
HS
A,
anal
ógic
a
6SN
1122
–0B
A11
–0A
A1
Reg
ulac
ión
AM
, an
alóg
ica
6SN
1121
–0B
A11
–0A
A1
vel.
anal
óg.,
t. fij
a, p
ot.
mot
.
Reg
ulac
ión
AM
, an
alóg
ica
6SN
1122
–0B
A12
–0A
A0
cons
igna
s fij
as,
pot.
mot
oriz
.
Reg
ulac
ión
HS
A,
anal
ógic
a
6SN
1122
–0B
A11
–0A
A0
salid
a de
pos
ició
n ex
tern
a
Reg
ulac
ión
HS
A,
anal
ógic
a
6SN
1121
–0B
A13
–0A
A0
sist
. de
med
ida
dir.,
señ
. TT
L
Reg
ulac
ión
HS
A,
anal
ógic
a
6SN
1121
–0B
A12
–0A
A0
sin
sist
ema
de m
edid
a di
rect
o
Reg
ul.
reso
lver
VS
A,
anal
ógic
a
6SN
1121
–0B
A11
–0A
A0
Reg
ul.
reso
lver
VS
A,
anal
ógic
a
6SN
1118
–0B
K11
–0A
A0
Reg
ulac
ión
VS
A,
anal
ógic
a
2 ej
es,
inte
rfas
e es
tánd
ar
6SN
1118
–0B
J11–
0AA
0
2 ej
es,
inte
rfas
e es
tánd
ar
1 ej
e, in
terf
ase
está
ndar
Reg
ulac
ión
VS
A,
anal
ógic
a
6SN
1118
–0A
E11
–0A
A
1 ej
e, in
terf
ase
está
ndar
Reg
ulac
ión
VS
A,
anal
ógic
a
6SN
1118
–0A
D11
–0A
A
1 ej
e, in
terf
ase
está
ndar
6SN
1118
–0A
A11
–0A
A
Módulo de potencia 300A
6SN112–1AA0–0JA
_____ _____ _____ _____ _____ HSA:120/150/193A
HSA:120/150/193A
HSA:120/150/193A
AM:120/150/193A
AM:120/150/193A
AM:120/150/193A
AM:120/150/193A
Módulo de potencia 400A
6SN112–1AA0–0KA0
_____ _____ _____ _____ _____ HSA:200/250/257A
HSA:200/250/257A
HSA:200/250/257A
AM:200/250/257A
AM:200/250/257A
AM:200/250/257A
AM:200/250/257A
Módulo de potencia 2x8A
6SN112–1AB0–0HA0
_____ _____ VSA:2x4/8A
_____ VSA–R:2x3/6A
_____ _____ _____ _____ _____ _____ _____
Módulo de potencia2x15A
6SN112–1AB0–0AA0
_____ _____ VSA:2x7,5/15A
_____ VSA–R:2x5/10A
_____ _____ _____ _____ _____ _____ _____
Módulo de potencia2x25A
6SN112–1AB0–0BA
_____ _____ VSA:2x12,5/25A
_____ VSA–R:2x9/18A
_____ _____ _____ _____ _____ _____ _____
Módulo de potencia2x50A
6SN112–1AB0–0CA
_____ _____ VSA:2x25/50A
_____ VSA–R:2x18/36A
_____ _____ _____ _____ _____ _____ _____
Las Instrucciones de puesta en marcha presentes son válidas para los módulosde accionamiento siguientes:
6SN1130–1AA11–0A0 Módulo VSA, 1 eje, interfase confortable
6SN1130–1AA12–0A0 Módulo VSA, 1 eje, interfase confortable, con opción HSA
6SN1130–1AD11–0A0 Módulo VSA, 1 eje, interfase estándar
6SN1130–1AE11–0A0 Módulo VSA, 2 ejes, interfase estándar
6SN1135–1BA1–0A0 Módulo HSA
6SN1140–1BA1–0A0 Módulo AM
Generalidades (AL)1 Combinaciones permitidas de mód. de potencia y unidades de regulación enchufables
07.94

AL
10.00
AL/1-5 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
El presente documento describe los pasos que son necesarios para poner enmarcha una composición SIMODRIVE ya installada. Otras informaciones técni-cas p. ej. sobre
condiciones ambientales
propuestas de circuitos
esquemas de conexión
croquis acotados
pueden encontrarse en las Instrucciones para proyecto asociadas.
SIMODRIVE 611Sistema de regulación a transistores para accionamientos de avance de c.a.y accionamientos de cabezal de c.a.Nº de pedido: 6SN1197–0AA00–0P
SIMODRIVEMotores trifásicos para accionamientos de avance y cabezalNº de pedido: 6SN1197–0AA20–0P
Generalidades (AL)1 Combinaciones permitidas de mód. de potencia y unidades de regulación enchufables
07.94

AL
10.00
AL/1-6 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Generalidades (AL)1 Combinaciones permitidas de mód. de potencia y unidades de regulación enchufables
Espacio para sus notas

NE
NE–i Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Alimentación de red (NE)
1 Ajustes estándar módulos NE (módulos UE y E/R),módulos de vigilancia y de resistencias pulsantes NE/1-3. . . . . . . . . . . . . . . . . . . . .
2 Mantenimiento y diagnóstico NE/2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Bornes y funciones de relé NE/2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Anexo NE/3-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Bornes de conexión Módulos NE, ÜW y PW NE/3-14. . . . . . . . . . . . . . . . . . . . .
3.2 Bornes de conexión Módulo UE 5/10 kW NE/3-16. . . . . . . . . . . . . . . . . . . . . . . .

NE
10.00
NE–ii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Espacio para sus notas

NE
10.00
NE/1-3 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Ajustes estándar módulos NE (módulosUE y E/R), módulos de vigilancia y de resi-stencias pulsantes
Importante
¡Respetar las indicaciones para regulación con corriente senoidal en módu-los E/R!
¡Si no se tiene en cuenta la diferencia de la regulación de corriente sinusoidal /de bloque, ¡el aparato puede quedar destruido!
En la parte superior de los módulos NE y de vigilancia figura un bloque de inter-ruptores S1 para ajustar las funciones siguientes:
ON: OFF:
URed=415V10% UCI = 625 V1)
Señalización fallo
Devolución red off1)
URed=400V10% UCI = 600 V1)
Devolución red on
1
2
3
4URed=480V+6%–10% S1.1 inactivo
Señalización Listo
S1
Alim. regulada bloqueada Alim. regulada desbloqueada5
6
S1.1activo
Regul. corr. senoid. Regul. corr. onda rectang.
Ajuste estándar
Figura 1-1 Bloque de interruptores DIL S1
Importante
En los módulos E/R con ref. MLFB 6SN114–10–01, el ajuste base esCorriente senoidal. ¡Respetar las indicaciones en pág. NE1-5!
Importante
¡Antes de conectar o desconectar a través del interruptor principal o del con-tactor de red es necesario dejar de activar o desembornar los B.63 (desblo-queo de impulsos) y/o B.48 (borne Marcha, Mando de contactor)!
1) sólo posible en el módulo E/R; se elevan en todos los módulos NE los umbrales de vigilancia
Alimentación de red (NE)1 Ajustes estándar módulos NE, módulos de vigilancia y de resistencias pulsantes
1

NE
10.00
NE/1-4 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
OFF: Módulo E/R URed =400V10%; UCI=600V (Tensión circuito intermedio);Módulo UE URed =400V10%; UCI=1,35*URed;Umbrales de vigilancia: (módulos E/R, UE, ÜM);PW on =644V (Umbral de conexión resistencia pulsante);PW off =618V (Umbral de desconexión resistencia pulsante);UCI>> =710V; (Umbral de sobretensión circuito intermedio)
ON: Módulo E/R URed =415V10%; UCI=625VMódulo UE URed =415V10%; UCI=1,35*URedUmbrales de vigilancia: (módulos E/R, UE, ÜM)PW on =670V; PW off =640VUCI>> =740V;
Nota: sólo activo con S1.4 OFF
OFF: Señalización Listo (relé Listo X111)
ON: Fallo (relé Listo X111)
Véase NE/capítulo 2.1
OFF: Ajuste estándar: realimentación a red activaLos módulos de E/R son aptos para devolver energíaMódulo UE: actúa la resistencia pulsatoria interna del módulo
ON: Realimentación a red desactivadaMódulo E/R: está desactivado el modo con devolución deenergíaMódulo UE: no actúa la resistencia pulsatoria interna delmódulo
Nota: Esta función sólo actúa en un módulo UE 10kW a partirde la ref.: 6SN1146–1AC00–0AA1 (no en UE 28kW)
OFF: S1.1 activo
ON: URed =480V+6%–10%; UCI=1,35*URed en sentido de alimentaciónUmbrales de vigilancia: (módulos E/R, UE, ÜM)PW on =744V; PW off =718VUCI>> =795V.
Nota: Servicio no regulado en sentido de alimentación(válido para ref. 6SN114–10–01).
Indicación
Sólo asociado a módulos de potencia con ref. (6SN114–10–01).En caso de motores con altura de eje <100: aprovechamiento máx. hasta losvalores 60k. Respetar lo indicado en las instrucciones de proyecto para moto-res.S1.4 ON sobrescribe las funciones de S1.5 y S1.1.
Interruptor S 1.1 :
Interruptor S 1.2 :
Interruptor S 1.3 :
Interruptor S 1.4 :
Alimentación de red (NE)1 Ajustes estándar módulos NE, módulos de vigilancia y de resistencias pulsantes
07.94

NE
10.00
NE/1-5 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Esta función sólo existe asociada a los módulos E/R,ref.: 6SN114–10–01OFF: Ajuste estándar: alimentación regulada activa.
ON: Servicio sin regulación en sentido de alimentaciónUCI=1,35*URed.En servicio con realimentación actúa a partir de UCI=600 ó625V, dependiendo del ajuste de S1.1.
OFF: Regulación con corriente con onda rectangular (la red sufrecorriente con onda rectangular).
ON: (Estándar) Esta función sólo existe asociada a módulos E/R,ref. 6SN114–10–01Regulación senoidal (la red sufre corriente con onda senoidal)
La corriente senoidal sólo está permitida si se cumplen las condicionesmarginales siguientes:
E/R16 kW
E/R36 kW
E/R55 kW
E/R80 kW
E/R120 kW
6SN114–1B01–0BA1
6SN114–1B02–0CA1
6SN114–1B0–0DA1
6SN114–1BB00–0EA1
6SN114–1BB01–0FA1
Bobina AF16 kW
Bobina AF36 kW
Bobina AF55 kW
Bobina AF80kW
Bobina AF120kW
6SN1111–0AA00–0BA0
6SN1111–0AA00–0CA0
6SN1111–0AA00–0DA0
6SN1111–0AA00–1EA0
6SN1111–0AA00–1FA0
Filtro de red paracorriente senoidal 1)
16 kW
Filtro de red paracorriente senoidal 1)
36 kW
Filtro de red paracorriente senoidal 1)
55 kW
Filtro de red paracorriente senoidal 1)
80 kW
Filtro de red paracorriente senoidal 1)
120 kW
6SN1111–0AA01–2BA0
6SN1111–0AA01–2CA0
6SN1111–0AA01–2DA0
6SN1111–0AA01–2EA0
6SN1111–0AA01–2FA0
Importante
Para el resto de combinaciones no mencionadas sólo se permite regula-ción con corriente con onda rectangular.
1) Los filtros red para corriente senoidal no incluyen, al contrario que los filtros de red para corriente con ondarectangular, ninguna bobina de conmutación de AF.La bobina de conmutación AF deberá instalarse por separado.Los citados tipos de filtro de red también son aptos para el modo Corriente de bloque.
Interruptor S 1.5 :
Interruptor S 1.6 :
Alimentación de red (NE)1 Ajustes estándar módulos NE, módulos de vigilancia y de resistencias pulsantes
07.94

NE
10.00
NE/1-6 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Alimentación de red (NE)1 Ajustes estándar módulos NE, módulos de vigilancia y de resistencias pulsantes
Espacio para sus notas

NE
10.00
NE/2-7 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Mantenimiento y diagnóstico
Elementos de indicación de los módulos de vigilancia y NE
2 LED rojo – Nivel de tensión 5 V perturbado
3 LED verde – Desbloqueos externos aún no presentes (faltan B. 63 y/o B. 64)
4 LED amarillo – Circuito intermedio cargado
5 LED rojo – Fallo de red (corte de red en una o varias fases en los bornes U1, V1, W1) 1)
– Bobina de conmutación no presente o montaje incorrecto o mal elegida– Potencia de cortocircuito de la red o del transformador insuficiente
6 LED rojo – Sobretensión en circuito intermedio Causas posibles: devolución desconectada, modo de prepara- ción, fallo en la red, en UE PW no en servicio o demasiado pe queño, tensión de red excesiva, sobrecarga dinámica Filtro de red instalado entre E/R ybobina de conmutación
1 2
3 4
5 6
1 LED rojo – Alimentación electrónica 15 V perturbada
Efectos:1 LED rojo encendido: Bloqueo de impulsos para todo el conjunto de
accionamientos2 LED rojo apagado: Bloqueo de impulsos para todo el conjunto de
accionamientos4 LED amarillo apagado: Bloqueo de impulsos para todo el conjunto de
accionamientos5 LED rojo encendido: Bloqueo de impulsos sólo para módulo E/R (ya no
es posible devolver energía). Los ejes siguen girando de momento. Se desexcita el relé Listo.
6 LED rojo encendido: Bloqueo de impulsos para todo el conjunto de accionamientos
1) Tiempo de detección de fallo de red, aprox. 30ms.Se detecta fallo de red a partir una tensión trifásica < 280V.En caso de corte monofásico en red, tras aprox. 1min se activa bloqueo de impulsos para los ejes deaccionamiento (señal memorizada), válida para ref. 6SN1114–10–01
Alimentación de red (NE)2 Mantenimiento y diagnóstico
10.00
2

NE
10.00
NE/2-8 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.1 Bornes y funciones de relé
X111 Relé LISTO:
– B. 72 – 73.1: Contacto de trabajo cerrado con “Listo”– B. 73.2 – 74: Contacto de reposo abierto con “Listo”
Interruptor S1.2 ON relé excitado cuando:– contactor principal ON (B.NS1–NS2 unidos, B.48 con señal de desbloqueo)– B.63, 64 =ON– no debe existir ningún fallo(tampoco en VSA 611A estándar, o accionamientos 611D o MCU)– VSA con interfaz estándar o resolver con ajuste “Listo” tiene que estar liberado
(bornes 663, 65)– NCU debe estar arrancado (SINUMERIK 840D, SINUMERIK 810D)– MCU tiene que estar arrancado
Interruptor S1.2 ON relé excitado cuando:– contactor principal interno ON (bornes NS1 – NS2 conectados, borne 48
liberado)– no debe existir ningún fallo (tampoco en VSA 611A estándar, o accionamientos
611D o MCU)– VSA con interfaz estándar o resolver con ajuste “Listo” tiene que estar liberado
(bornes 663, 65)– NCU debe estar arrancado (SINUMERIK 840D, SINUMERIK 810D)– MCU tiene que estar arrancado
X121 Prealarma I2t y sobretemperatura motor:
B. 5.1 – 5.2: Contacto de trabajo abierto con “sin fallos”B. 5.1 – 5.3: Contacto de reposo cerrado con “sin fallos”
Este relé conmuta cuando:– en el E/R ––> responde vigilancia de temperatura disipador– en el VSA 611D ––> responde vigilancia de temperatura motor
––> responde vigilancia de temperatura disipador – en el VSA 611A confortable
––> responde vigilancia de temperatura motor––> (con resolver se aplica: ¡¡ sin almacenamiento, sin
desconexión !!)––> responde vigilancia de temperatura disipador––> responde activación preaviso I2t (sin memoria)
– en el VSA 611A estándar––> responde vigilancia de temperatura motor––> responde vigilancia de temperatura disipador––> responde vigilancia de temperatura I2t
X171 B. NS1–NS2 (circuito de la bobina del relé interno de red y precarga):
– sirve para aislar galvánicamente de la red (debe consultarse el estado del contacto de señalización B. 111–213)– estos relés sólo deben conmutar si está abierto el B. 48 (sin limitación
a partir de la ref. 6SN114–101–0 para 10, 16 y 55kW, a partir de la ref. 6SN114–102–0 para 36kW, todos los de 80 y 120kW)
Alimentación de red (NE) 10.00
2.1 Bornes y funciones de relé

NE
10.00
NE/2-9 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
B. 48 Start (Marcha)
– tiene la máxima prioridad– secuencia:
precarga ON – consulta estado UCI310V y UCI√2*URed–50V
500ms-Contactor precarga OFF, consulta de si OFF, contactor ppal. ON1s-Desbloqueos internos (para E/R y módulos de accionamiento)
– se memoriza durante la precarga
B. 63 Desbloqueo de impulsos
– tiene la máxima prioridad para el desbloqueo de impulsos de todos los módulos– actúa sin retardo
B. 64 Desbloqueo del accionamiento
– actúa sin retardo sobre todos los módulos– si se retira la señal se activa en todos accionamientos ncons=0 y
– en HSA / AMM 611 A, tras bajar de una velocidad ajustable sebloquean los impulsos. Se frena siguiendo la rampa.
– en VSA 611 A, tras transcurrir las temporizaciones ajustadas (de fábrica: 240ms), se bloquean todos los reguladores e impulsos.Se frena en el límite de corriente.
– en accionamientos 611D, tras bajar de una velocidad ajustable y/otras transcurrir una temporización ajustable se bloquean los impulsos.Se frena siguiendo los límites ajustados. (En cabezales es posiblematerializar una rampa usando la limitación en modo generador[kW]).
B. 112 abierto Modo de preparación
– está bloqueada la regulación de UCI– ¡no es posible devolver energía, es decir al frenar UCI >600V!– esta función se puede consultar a través del mensaje Bloqueo de arranque,
bornes AS1 – AS2.
Atención
¡Con motores asíncronos pueden lograrse altas velocidades incluso con unaUCI reducida!
B. AS1–AS2 Señalización bloqueo de arranque
– B. AS1–AS2 cerrado significa “actúa bloqueo de arranque” (es decir, borne 48 = abierto, modo de preparación)
B. 111, 113, 213 Contacto de señalización del contactor de red interno
– B. 111 – 113: Contacto de trabajo– B. 111 – 213: Contacto de reposo (en E/R 16kW y UE 10kW, sólo a par-
tir de ref. 6SN1145–101–0)
Alimentación de red (NE)10.00
2.1 Bornes y funciones de relé

NE
10.00
NE/2-10 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
B. 19 FR–:
– masa de referencia para tensión de desbloqueo– libre de potencial (unida a la masa general de referencia B.15
vía resistencia 10kΩ)– el B.19 no debe unirse al B.15 (aplicar a barra PE o X131)
B. 9 FR+:
– tensión de desbloqueo +24V– capacidad de carga máx. de la alimentación SV: 500mA (corresponde a 8 EP;1
entrada de optoacoplador necesita 12mA con UE = 5 kW ––> 1A)
X 141 Tensiones alimentación electrónica:
– B. 7: P24 +20,4 a 28,8V / 50mA– B. 45: P15 +15V / 10mA– B. 44: N15 –15V / 10mA– B. 10: N24 –20,4 a 28,8V / 50mA– B. 15: M 0V – el B. 15 no debe aplicarse en PE (bucle a masa) – el B. 15 no debe unirse al B. 19
(cortocircuito vía bobina que interconecta internamente B.15 con X131)
B. L1–L2 en 80kW y 120kW – E/R
– sirve para alimentar el circuito de bobina del contactor de red interno– se alimenta directamente de la red con 2AC 400V (no entre E/R y bobina)– fusible: IN 4 A, ejecución gL
Conexión de ventilador en módulo E/R 80 y 120kW
– tras 3 AC 360 a 510V, 45 – 65 Hz directamente de la red (no entre E/R y bobina)– ¡atender a secuencia de fases correcta!– fusible : IN 1,5 A (guardamotor)
6–Conexión de cable con conexión adicional de la alimentación al circuito intermedio:
– En este modo de operación, en los bornes 2U1, 2V1 y 2W1 de la alimentacióndeben alimentarse forzosamente con la tensión de red desde un punto intermedio entre bobina serie y módulos E/R, ya que si no se destruye lafuente de alimentación.¡Esto es también válido para los módulos de vigilancia!
Indicación
Esto está garantizado con puentes insertados en fábrica en el conector X181.
Módulo de vigilancia con conexión a red y conexión adicional de la alimentación del circuito intermedio
– En este modo de operación, los bornes 2U1, 2V1 y 2W1 de la fuente de alimentación deben alimentarse forzosamente con la tensión de red tomadaentre bobina serie y E/R, ya que si no se destruye la fuente de alimentación.
– El B. 63 debe conmutarse a través del relé Listo del E/R para evitar que losmódulos situados a la derecha del módulo de vigilancia arranquen durante lafase de precarga.
Alimentación de red (NE) 10.00
2.1 Bornes y funciones de relé

NE
10.00
NE/2-11 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Si se señaliza un fallo de red o está apagado el LED amarillo es necesariocomprobar el estado del módulo limitador de sobretensión.Forma de proceder:
1. Aislar de tensión el equipo.
2. Desenchufar el módulo limitador de sobretensión y enchufar el conectorX181 en el módulo NE. Si está operativo el módulo NE, esto significa que elmódulo limitador de sobretensión está defectuoso y debe sustituirse.De lo contrario, verificar la red y, dado el caso, comprobar el estado delmódulo NE/módulos de accionamiento.
Indicación
De esta forma puede proseguirse el servicio, pero sin protección contra so-bretensiones.
3. Enchufar hasta el tope el módulo limitador de sobretensión 566018.9415.00y enchufar el conector X181 en el módulo limitador de sobretensón.
Indicación
¡El funcionamiento sin módulo de limitación de sobretensión no es conforme aUL!
Instrucciones dediagnóstico
Alimentación de red (NE)10.00
2.1 Bornes y funciones de relé

NE
10.00
NE/2-12 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Alimentación de red (NE) 10.00
2.1 Bornes y funciones de relé
Espacio para sus notas

NE
10.00
NE/3-13 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Anexo
Indicación
Si se utilizan circuitos que no usan pequeñas tensiones de protección (PELV),entonces es necesario codificar los conectores en los bornes AS1, AS2,B. 111, B.113 y B. 213 para evitar confundirlos
––> v. EN 60204–1, apt. 6.4.
Referencias de los conectores codificadores ––> v. catálogo NC 60.1.
Al B. 19 sólo deben conectarse circuitos de pequeña tensión de seguridad(PELV).
Alimentación de red (NE)3.1 Bornes de conexión módulos NE, ÜW y PW
07.94
3

NE
10.00
NE/3-14 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.1 Bornes de conexión Módulos NE, ÜW y PW
Tabla 3-1 Funciones de los bornes
Nºborne
De-sig.
FunciónTipo
1) Tensión típ./límites Sección máx.Bornes presen-
tes en 3)
U1V1W1
Conexión de red E 3AC 400 V 480 V segúnInstrucciones para
proyectoE/R, UE
L1L2
Conexión de redpara contactor
EE
2AC 400 V directamente a redL1, L2, L3 v. apt. 9.2
16mm2/10mm2 4)
16mm2/10mm2 4)E/R 80/104 kW,
120/156 kW
PEP600M600
Conduct. protecciónCircuito intermedioCircuito intermedio
EE/AE/A
0 V+300 V–300 V
TornilloBarraBarra
E/R, UE, ÜW, PW
Estribo de tierra5) E/A –300 V Barra E/R, UE
P600M600
Circuito intermedioCircuito intermedio
EE
+300 V–300 V
16mm2/10mm2 4)
16mm2/10mm2 4) ÜW
1R,2R,3R
Conexión resistenciainterna
E/A 300 V 16mm2/10mm2 4)
PW
X131 M electrónica E/A 0 V 16mm2/10mm2 4) E/R, UE, ÜW
X351 Bus interno E/A diversas Cable plano E/R, UE, ÜW, PW
M500
P500
1U12U11V12V11W12W1
X181
X181
X181X181X181X181X181X181
Alimentación circ. in-termedioAlimentación circ. in-termedioSalida L1Entrada L1Salida L2Entrada L2Salida L3Entrada L3
E
E
AEAEAE
DC 600 V 680 V
DC 600 V 680 V
3AC 400 V 480 V3AC 400 V 480 V3AC 400 V 480 V3AC 400 V 480 V3AC 400 V 480 V3AC 400 V 480 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
E/R, UE, ÜW
745441015R
X141X141X141X141X141X141
P24P15N15N24MRESET6)
AAAAAE
+20,4...28,8 V/50 mA+15 V/10 mA–15 V/10 mA–20,4...28,8 V/50 mA0 VB. 15/RE = 10 kΩ
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
E/R, UE, ÜW
5.35.25.16399
6419
X121X121X121X121X121X121X121
Contacto de reléSeñaliz. agrup.I2t/temp. motor
Desbl. impulsos2)
Tensión desbloqu.2)8)
Tensión desbloqu. 2)8)
Desbl. accionamto2)
Tensión desbloqu.Potencial de ref.
ÖSEEAAE
DC 50 V/0,5 A/12 VA máx.DC 5 V/3 mA mín.
+13 V...30 V/RE = 1,5 kΩ+24 V+24 V+13 V...30 V/RE = 1,5 kΩ0 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
E/R, UE, ÜW
74nc
73.273.1
nc72
X111X111X111X111X111X111
Contacto de reléSeñalizaciónListo
Ö
EE
S
1AC 250V/DC 50V/2A máx.DC 5V/3mA mín.
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
E/R, UE, ÜW
Alimentación de red (NE)3.1 Bornes de conexión módulos NE, ÜW y PW

NE
10.00
NE/3-15 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-1 Funciones de los bornes
Nºborne
Bornes presen-tes en 3)Sección máx.Tensión típ./límites
Tipo1)Función
De-sig.
9112
X161X161
Tensión desbloqu. 2)8)
Modo prep./modo normal 2)
AE
+24 V+21 V...30 V/RE = 1,5 kΩ
1,5 mm2
1,5 mm2 E/R, UE, ÜW
48111213
113
X161X161X161
X161
Mando contactor 2)
Contactos señaliz.
Contactor red
EE
Ö 7)
S
+13 V...30 V/RE = 1,5 kΩ+30 V/1 A (111–113)1AC 250 V/DC 50 V/2 A máx.DC 17 V/3 mA mín.
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
E/R, UE
AS1AS2
X172X172
Contacto señaliz.bloqueo antiarran.(B.112)
EÖ
AC 250V/1A/DC 50V/2A máx.DC 5 V/10 mA mín.
1,5 mm2
1,5 mm2 E/R
NS1NS2
X171X171
Contacto de bobinapara contactor de redde precarga
AE
+24 V 1,5 mm2
1,5 mm2 E/R, UE
19
50
X221
X221
Tensión desbloqu.Potencial de ref.Contacto de mandopara descarga rápida
A
E
0 V
0 V
1,5 mm2
1,5 mm2 PW
1) E = Entrada, A = Salida, Ö = NC, S = NA (al señalizar: cerrado = High, abierto = Low)2) Masa de referencia es B.19 (dentro del módulo, unido vía 10 k con la masa de referencia general
X131/B.15. El B. 15 no debe conectarse con PE o con el B. 19. ¡No conectar fuentes de tensión externascon el B. 15! El B. 19 puede conectarse con X131.
3) E/R = módulo de alimentación/devolución;UE = alimentación no regulada;ÜW = módulo de vigilancia;PW = módulo de resistencias pulsantes
4) El primer dato es válido con terminal recto. El segundo dato es válido para cable flexible sin vaina terminal.5) El estribo de tierra sirve para poner a tierra la barra M del circuito intermedio vía una resistencia de 100 kΩ
(deberá estar preferentemente colocado, colocarlo siempre en caso de redes no puestas a tierra).6) RESET = borrado de la memoria de fallos activado por flancos para todo el conjunto del accionamiento
(B. R→ B.15 = RESET)7) B. 111–213 Contacto normalmente cerrado de maniobra positiva (en E/R 16 kW y UE 10kW, sólo a partir de ref.
6SN114–101–0).B. 111–113 Contacto normalmente abierto no de maniobra positiva
8) Carga máx. en B. 9 – B.19: 0,5A
Alimentación de red (NE)3.1 Bornes de conexión módulos NE, ÜW y PW

NE
10.00
NE/3-16 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.2 Bornes de conexión Módulo UE 5/10 KW
Tabla 3-2 Funciones de los bornes
Nºborne
Desig. FunciónTipo
1) Tensión típ./límites Sección máx.
U1V1W1
X1 Conexión de red E 3AC 400 V 480 V 4 mm2 flexiblesin vaina terminal
6 mm2 con terminalrecto
PE1PE2
–
X131X351
Conductor de protección
M electrónicaBus internoEstribo de tierra3)
E
EE/AE/A
0 V
0 Vdiversas–300 V
Rosca M5
Rosca M4Cable plano 34 polos
Barra
P600M600
Circuito intermedioCircuito intermedio
E/AE/A
+300 V–300 V
BarraBarra
M500P5001U12U11V12V11W12W1
X181X181X181X181X181X181X181X181
Alimentación c. interm.Alimentación c. interm.Salida L1Entrada L1Salida L2Entrada L2Salida L3Entrada L3
EEAEAEAE
–300 V+300 V3AC 400 V 480 V3AC 400 V 480 V3AC 400 V 480 V3AC 400 V 480 V3AC 400 V 480 V3AC 400 V 480 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
5.35.25.1nc
X121AX121AX121AX121A
Contacto de reléSeñaliz. agrupadaI2t/temp. motor
ÖSE
1DC 50 V/0,5 A/12 VA máx.1DC 5 V/3 mA mín.
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
7473.273.1
72
X121BX121BX121BX121B
Señalización reléListo/Fallo
ÖEES
1AC 250 V/DC 50 V/2 A máx.
1DC 5 V/3 mA mín.
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
6399
64R
19
X141AX141AX141AX141AX141AX141A
Desbloqueo impulsos2)
FR+2)4)FR+2))Desbloqueo accionam.2)
RESET2)
FR–, masa referencia tensióndesbloqueo
EAAEEA
+13 V...30 V/RE = 1,5 kΩ+24 V+24 V+13 V...30 V/RE = 1,5 kΩ0/+24 V0 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
111213
X161X161
Contacto señalizaciónContactor red
EÖ
1AC 250 V/DC 50 V/2 A1DC 17 V/3 mA mín.
1,5 mm2
1,5 mm2
911248
NS1NS2
15
X141BX141BX141BX141BX141BX141B
FR+2)4)Modo prep./m. normal2)
Mando contactor2)
M
Contacto bobina paracontactor de red
AEEAEA
+24 V+13 V...30 V/RE = 1,5 kΩ+13 V...30 V/RE = 1,5 kΩ+24 V0/+24 V0 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1) E =Entrada, A = Salida, Ö = NC, S = NA (al señalizar: cerrado=High, abierto=Low)2) Borne de referencia es B.19 (dentro del módulo, unido vía 10 k con la masa de referencia general X131).3) El estribo de tierra sirve para poner a tierra la barra M del circuito intermedio vía una resistencia de 100 kΩ
(deberá estar preferentemente colocado, colocarlo siempre en caso de redes no puestas a tierra).4) Carga máx. en B. 9 – B. 19: 1A
Alimentación de red (NE)3.2 Bornes de conexión módulo UE 5/10 KW

VS
VS–i Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avance (VS)
1 Puesta en marcha abreviada,ajustes estándar VS/1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Adaptación del taco para motorescon tensión taquimétrica ≤ 16,5 V a velocidad nominal VS/1-4. . . . . . . . . . . .
1.2 Ajustes del regulador de intensidad VS/1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Optimización del regulador de velocidad VS/2-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Adaptación del taco VS/2-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Ajuste de la ganancia proporcional Kp sin adaptación VS/2-19. . . . . . . . . . . . .
2.3 Ajuste del tiempo de acción integral TN sin adaptación VS/2-20. . . . . . . . . . .
2.4 Tiempo de acción integral con adaptación (de ser necesaria) VS/2-21. . . . . .
2.5 Ganancia proporcional con adaptación (sólo interfase confortable) VS/2-22.
2.6 Ajuste del margen de adaptación (normalmente no necesario) VS/2-23. . . . .
2.7 Limitación de la acción I del regulador de velocidad(sólo interfase confortable) VS/2-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8 Compensación de deriva (Offset) VS/2-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Puesta en marcha de las funciones adicionales VS/3-25. . . . . . . . . . . . . . . . . . . . . . . .
3.1 Elementos de ajuste con interfase estándar VS/3-25. . . . . . . . . . . . . . . . . . . . . 3.1.1 Dimensionamiento de los elementos de ajuste (interfase estándar) VS/3-27.
3.2 Elementos de ajuste con interfase confortable VS/3-29. . . . . . . . . . . . . . . . . . .
4 Interfases de consigna VS/4-33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Puesta en marcha con opción de cabezal (HSA) VS/5-35. . . . . . . . . . . . . . . . . . . . . . .
5.1 Ajustes preliminares VS/5-35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.1 Ajustes con la tarjeta de regulación desenchufada VS/5-35. . . . . . . . . . . . . . . 5.1.2 Ajustes en servicio VS/5-39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Salidas analógicas VS/5-41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Libre para extensiones VS/6-43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Encendido VS/7-45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Mantenimiento y diagnóstico VS/8-47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Hembrillas de medida y elementos de indicaciónde los módulos de avance VS/8-47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.1 Interfase confortable VS/8-47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.1.2 Interfase estándar VS/8-49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Búsqueda de fallos VS/8-50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

VS
10.00
VS–ii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9 Anexo VS/9-51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Bornes de conexión VS/9-51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Esquema de bloques de la tarjeta opcional de cabezal VS/9-53. . . . . . . . . . . .
9.3 Esquema de bloques de la unidad de ajuste VS/9-54. . . . . . . . . . . . . . . . . . . . .
9.4 Esquema de bloques de la interfase estándar VS/9-55. . . . . . . . . . . . . . . . . . .
9.5 Esquema de bloques del lazo de regulación(interfase confortable) VS/9-56. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6 Captador de motor asignación de X311/X313 (1er/2º eje) VS/9-57. . . . . . . . .

VS
10.00
VS/1-3 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Puesta en marcha abreviada,ajustes estándar
Para la interfase confortable, los elementos de ajuste figuran en la unidad deajustes; para la interfase estándar, en la unidad de regulación (v. cap. 9 Anexo).Para realizar una puesta en marcha estándar es necesario ajustar los paráme-tros: adaptación del taco, normalización de intensidad y ganancia del reguladorde intensidad.
La puesta en marcha se divide en etapas; una vez realizado los ajustesestándar puede continuarse con otra etapa de puesta en marcha o puede co-nectarse el equipo.
P. en M. abreviadaAjustes estándar
OptimizaciónReg. de velocidad
Funciones adicionales
Interfases de consigna
P. en M. con opción HSA
Encendido Cap. 7
Mantenimiento ydiagnóstico
Anexo
Cap. 1
Cap. 2
Cap. 3
Cap. 4
Cap. 5
Cap. 8
Cap. 9
Etapas de puestaen marcha de losmódulos VSA con interface confortabley estándar
Módulos de avance (VS)
1

VS
10.00
VS/1-4 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.1 Adaptación del taco para motores con tensión taquimétrica ≤ 16,5 V a velocidad nominal
Afecta sólo a los motores 1FT503V–VAF71 y 1FT504V–VAF71
Los tres interruptores del bloque de interruptores S1 (S4 para interfaseestándar, segundo eje) = ON.Adicionalmente es posible una calibración vía resistencias discretas, v. apts.3.1 - 3.2.
1.2 Ajustes del regulador de intensidad
Los ajustes para el límite de intensidad y la ganancia del regulador de intensi-dad Kp(I) se tomarán de las tablas de adaptación, tabla 1-3 a tabla 1-9. Si no esposible encontrar la combinación módulo de avance/motor buscada, los valoresdeberán calcularse en base a las fórmulas.
Unidad de ajustes, bloque de interruptores S2
Unidad de regulación, bloque de interruptores S2 (S5 para el segundo eje)
Indicación
Ambos valores de ajuste son válidos para las dos versiones de la regulaciónsiempre que no se indique lo contrario expresamente.
Límite intens.Imáx (Intensidad máxima ajustada)
Ilím (Intensidad pico de la parte de potencia) 100 [%]=
Tabla 1-1 Límite de intensidad
S2.xó
S5.xen ON
– 2 3 23
4 24
34
234
5 25
35
235
45
345
2345
(%) 100 85 68 61 50 46 41 39 36 34 30 29 26 24 23
El límite de intensidad deberá reducirse como mínimo al valor de punta permi-tido por el motor. Dependiendo de los órganos mecánicos accionados puedeser necesaria una mayor reducción.
Interfase conforta-ble y estándar
Interfase conforta-ble
Interfase estándar
Normalización deintensidad real
Módulos de avance (VS)1.2 Ajustes del regulador de intensidad

VS
10.00
VS/1-5 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Imáx = Intensidad máxima ajustada del eje en ALA = Inductancia del devanado del motor en mH (v. Instrucciones para
proyecto de motores de c.a. para accionamientos de avance ycabezal)
Imáx LA
40Kp(I) <
Tabla 1-2 Ganancia del regulador de intensidad
S2.xóS5.xen ON
– 6 7 67
8 68
78
9 69
79
679
89
789
6789
Kp(I) 0,5 1 2 2,5 4 4,5 5,5 6 6,5 7,5 8 9,5 11 11,5
R15 situada en la unidad de ajustes permite incrementar aún más el margen deajuste de la ganancia del regulador de intensidad.
La fórmula siguiente es válida si están cerrados (ON) S2.6 a S2.9:
Kp(I) 11, 5 1230
R15
Tabla 1-3 Tabla de adaptación para módulo de potencia 6SN112–1A00–0HA1 4/8 A
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [A] n [r/min]Interruptores
I á [A]Interruptores
Kp(I)1FT... Mo [Nm] Io [A] nnom [r/min]2 3 4 5
Imáx [A]6 7 8 9
Kp(I)
5034–AK71 0,5 0,93 6000 x o x o 3,68 o x o o 2,0
5036–AK71 0,75 1,4 6000 o x o o 5,44 o x o o 2,0
5042–AF715042–AK71
0,660,66
0,751,2
30006000
xx
ox
oo
xo
2,724,88
xx
xx
oo
oo
2,52,5
5044–AF715044–AK71
1,31,3
1,52,3
30006000
oo
xo
oo
oo
5,448,0
xx
xo
oo
oo
2,51,0
5046–AF71 2,6 3,0 3000 o o o o 8,0 o x o o 2,0
5062–AC715062–AF715062–AG715062–AK71
2,22,22,22,2
1,32,02,73,9
2000300040006000
oooo
xooo
oooo
oooo
5,448,08,08,0
xoox
xxoo
xoxo
xxoo
11,57,54,01,0
5064–AC71 4,5 2,7 2000 o o o o 8,0 o x o x 7,5
5066–AC71 6,5 3,9 2000 o o o o 8,0 x o x o 4,5
5070–AC715070–AF715070–AG71
3,03,03,0
1,82,63,6
200030004000
ooo
ooo
ooo
ooo
8,08,08,0
xox
xxo
xox
xxo
11,57,54,5
5071–AC71 4,5 2,9 2000 o o o o 8,0 x x o x 8,0
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
Ganancia regula-dor intensidadKp(I)
Interfase conforta-ble
Tablas deadaptación
Módulos de avance (VS)1.2 Ajustes del regulador de intensidad
10.00

VS
10.00
VS/1-6 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-4 Tabla de adaptación para módulo de potencia 6SN112–1A00–0AA1 7,5/15 A
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [A] n [r/min]Interruptores
I á [A]Interruptores
Kp(I)1FT... Mo [Nm] Io [A] nnom [r/min]2 3 4 5
Imáx [A]6 7 8 9
Kp(I)
5034–AK71 0,5 0,93 6000 o x x x 3,68 o x o o 2,0
5036–AK71 0,75 1,4 6000 o o o x 5,44 o x o o 2,0
5042–AF715042–AK71
0,660,66
0,751,2
30006000
xx
xx
xo
xx
3,454,5
oo
ox
xo
oo
4,02,0
5044–AF715044–AK71
1,31,3
1,52,3
30006000
xx
xx
xo
oo
5,859,15
oo
ox
xo
oo
4,02,0
5046–AF715046–AK71
2,62,6
3,04,7
30006000
xo
oo
oo
oo
12,715,0
ox
oo
xo
oo
4,01,0
5062–AC715062–AF715062–AG715062–AK71
2,22,22,22,2
1,32,02,73,9
2000300040006000
xooo
ooxo
oxoo
xooo
5,17,510,215,0
oxox
xoxx
xoxo
xxoo
11,06,55,52,5
5064–AC715064–AF715064–AG71
4,54,54,5
2,74,15,5
200030004000
ooo
xoo
ooo
ooo
10,215,015,0
oxx
oox
xoo
xxo
9,56,52,5
5066–AC715066–AF71
6,56,5
3,96,0
20003000
oo
oo
oo
oo
15,015,0
oo
oo
xx
xo
9,54,0
5070–AC715070–AF715070–AG715070–AK71
3,03,03,03,0
1,82,63,65,3
2000300040006000
oooo
oxoo
xooo
oooo
7,510,215,015,0
xoxo
xoxo
xxox
xxxo
11,59,58,04,0
5071–AC715071–AF715071–AG71
4,54,54,5
2,94,35,2
200030004000
xoo
ooo
ooo
ooo
12,715,015,0
xxx
xoo
xox
xxo
11,56,54,5
5072–AC71 10,0 6,1 2000 o o o o 15,0 x x o x 8,0
5073–AC715073–AF71
7,07,0
4,36,4
20003000
oo
oo
oo
oo
15,015,0
oo
oo
xx
xo
9,54,0
5100–AC71 10,0 6,2 2000 o o o o 15,0 o x x o 5,5
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
Módulos de avance (VS)1.2 Ajustes del regulador de intensidad
10.00

VS
10.00
VS/1-7 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-5 Tabla de adaptación para módulo de potencia 6SN112–1A00–0BA1 12,5/25 A
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [A] n [r/min]Interruptores
I á [A]Interruptores
Kp(I)1FT... Mo [Nm] Io [A] nnom [r/min]2 3 4 5
Imáx [A]6 7 8 9
Kp(I)
5036–AK71 0,75 1,4 6000 x x x x 5,75 o x o o 2,0
5044–AF715044–AK71
1,31,3
1,52,3
30006000
oo
xo
xo
xx
6,09,0
oo
ox
xo
oo
4,02,0
5046–AF715046–AK71
2,62,6
3,04,7
30006000
oo
ox
xo
oo
12,517,0
oo
ox
xo
oo
4,02,0
5062–AC715062–AF715062–AG715062–AK71
2,22,22,22,2
1,32,02,73,9
2000300040006000
xxxx
xoox
xoxo
xxoo
5,758,5
10,2515,75
xxox
xxxx
xoxo
xxoo
11,58,05,52,5
5064–AC715064–AF715064–AG715064–AK71
4,54,54,54,5
2,74,15,58,0
2000300040006000
xooo
oxoo
xooo
oooo
10,2517,025,025,0
xxox
xoxx
xoxo
xxoo
11,56,55,52,5
5066–AC715066–AF715066–AG715066–AK71
6,56,56,56,5
3,96,07,911,6
2000300040006000
oooo
xooo
oooo
oooo
17,025,025,025,0
oxxo
ooxx
xooo
xxoo
9,56,52,52,0
5070–AC715070–AF715070–AG715070–AK71
3,03,03,03,0
1,82,63,65,3
2000300040006000
oxoo
xoxo
oxoo
xooo
7,511,517,025,0
xoox
xxoo
xxxo
xxxx
11,511,09,56,5
5071–AC715071–AF715071–AG715071–AK71
4,54,54,54,5
2,94,35,27,9
2000300040006000
oooo
oxoo
xooo
oooo
12,517,025,025,0
xxxx
xxxx
xooo
xxxo
11,58,08,02,5
5072–AC715072–AF715072–AG71
10,010,010,0
6,19,112,0
200030004000
ooo
ooo
ooo
ooo
25,025,025,0
xox
xox
xoo
xxo
11,56,02,5
5073–AC715073–AF715073–AG715073–AK71
7,07,07,07,0
4,36,48,112,5
2000300040006000
oooo
xooo
oooo
oooo
17,025,025,025,0
oxxx
oooo
xoxo
xxoo
9,56,54,51,0
5074–AC71 14,0 8,5 2000 o o o o 25,0 x x o x 8,0
5076–AC71 18,0 11,5 2000 o o o o 25,0 o x x o 5,5
5100–AC715100–AF715100–AG71
10,010,010,0
6,29,212,5
200030004000
ooo
ooo
ooo
ooo
25,025,025,0
oox
oox
xxo
xoo
9,54,02,5
5101–AC71 15,0 9,4 2000 o o o o 25,0 o x x o 5,5
5102–AA71 27,0 9,9 1200 o o o o 25,0 x x o x 8,0
5103–AC71 19,0 12,0 2000 o o o o 25,0 o o x o 4,0
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
Módulos de avance (VS)1.2 Ajustes del regulador de intensidad
10.00

VS
10.00
VS/1-8 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-6 Tabla de adaptación para módulo de potencia 6SN112–1A00–0CA1 25/50 A
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [A] n [r/min]Interruptores
I á [A]Interruptores
Kp(I)1FT... Mo [Nm] Io [A] nnom [r/min]2 3 4 5
Imáx [A]6 7 8 9
Kp(I)
5044–AK71 1,3 2,3 6000 o o x x 13,0 x x o o 2,5
5046–AF715046–AK71
2,62,6
3,04,7
30006000
oo
xo
ox
xo
15,025,0
ox
ox
xo
oo
4,02,5
5062–AG715062–AK71
2,22,2
2,73,9
40006000
xo
ox
xx
xo
13,019,5
xx
oo
ox
xo
6,54,5
5064–AC715064–AF715064–AG715064–AK71
4,54,54,54,5
2,74,15,58,0
2000300040006000
oxoo
oxox
xxxo
xooo
13,019,525,034,0
xxox
xxxx
xoxo
xxoo
11,58,05,52,5
5066–AC715066–AF715066–AG715066–AK71
6,56,56,56,5
3,96,07,911,6
2000300040006000
xxoo
xxxo
xooo
oooo
19,530,534,050,0
xxxo
xxoo
xoxx
xxoo
11,58,04,54,0
5070–AF715070–AG715070–AK71
3,03,03,0
2,63,65,3
300040006000
oxo
xoo
xox
xxo
12,017,025,0
xox
xoo
xxo
xxx
11,59,56,5
5071–AC715071–AF715071–AG715071–AK71
4,54,54,54,5
2,94,35,27,9
2000300040006000
oooo
oxox
xxxo
xooo
13,020,525,034,0
xoxo
xoxo
xxox
xxxo
11,59,58,04,0
5072–AC715072–AF715072–AG715072–AK71
10,010,010,010,0
6,19,112,017,5
2000300040006000
oxoo
oooo
xooo
oooo
25,042,550,050,0
xoxx
xoox
xxoo
xxxo
11,59,56,52,5
5073–AC715073–AF715073–AG715073–AK71
7,07,07,07,0
4,36,48,112,5
2000300040006000
oxxo
xxoo
xooo
oooo
20,530,542,550,0
xxox
xxxx
xooo
xxxo
11,58,07,52,5
5074–AC715074–AF715074–AG715074–AK71
14,014,014,014,0
8,513,016,525,0
2000300040006000
xooo
oooo
oooo
oooo
42,550,050,050,0
xxxx
xooo
xoxo
xxoo
11,56,54,51,0
5076–AC715076–AF715076–AG71
18,018,018,0
11,516,521,5
200030004000
ooo
ooo
ooo
ooo
50,050,050,0
oxx
xox
xxo
xoo
11,04,52,5
5100–AC715100–AF715100–AG715100–AK71
10,010,010,010,0
6,29,212,518,0
2000300040006000
xxoo
xooo
oooo
oooo
30,542,550,050,0
xxxx
xoox
xoxo
xxoo
11,56,54,52,5
5101–AC715101–AF715101–AG71
15,015,015,0
9,414,517,5
200030004000
xoo
ooo
ooo
ooo
42,550,050,0
oxx
oox
xxo
xoo
9,54,52,5
5102–AA715102–AC715102–AF71
27,027,027,0
9,916,525,0
120020003000
xoo
ooo
ooo
ooo
42,550,050,0
xxx
xox
xoo
xxo
11,56,52,5
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
Módulos de avance (VS)1.2 Ajustes del regulador de intensidad
10.00

VS
10.00
VS/1-9 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-6 Tabla de adaptación para módulo de potencia 6SN112–1A00–0CA1 25/50 A, a continuación
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [A] n [r/min]Interruptores
I á [A]Interruptores
Kp(I)1FT... Mo [Nm] Io [A] nnom [r/min]2 3 4 5
Imáx [A]6 7 8 9
Kp(I)
5103–AC715103–AF715103–AG71
19,019,019,0
12,017,523,0
200030004000
ooo
ooo
ooo
ooo
50,050,050,0
xxo
xxx
ooo
oox
8,02,52,0
5104–AA715104–AC71
37,037,0
14,022,5
12002000
oo
oo
oo
oo
50,050,0
xo
xo
xx
xo
11,54,0
5106–AA71 45,0 17,0 1200 o o o o 50,0 x x o x 8,0
5108–AA71 55,0 20,5 1200 o o o o 50,0 x o o x 6,5
5132–AA71 60,0 22,5 1200 o o o o 50,0 o x o x 7,5
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
Módulos de avance (VS)1.2 Ajustes del regulador de intensidad
10.00

10.00
VS/1-10 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-7 Tabla de adaptación para módulo de potencia 6SN112–1AA00–0DA1 40/80 A
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [A] n [r/min]Interruptores
I á [A]Interruptores
Kp(I)1FT Mo [Nm] Io [A] nnom [r/min]2 3 4 5
Imáx [A]6 7 8 9
Kp(I)
4101–SK714101–SN71
20,020,0
33,039,0
60008000
oo
oo
oo
oo
80,080,0
ox
xo
oo
oo
2,01,0
4102–SG71 33,0 35,0 4000 o o o o 80,0 o o x o 4,0
5046–AK71 2,6 4,7 6000 o x o x 24,0 x x o o 2,5
5062–AK71 2,2 3,9 6000 o x x x 19,2 o o x o 4,0
5064–AF715064–AG715064–AK71
4,54,54,5
4,15,58,0
300040006000
ooo
xoo
xox
xxo
19,228,840,0
xxo
xoo
oox
xxo
8,06,54,0
5066–AC715066–AF715066–AG715066–AK71
6,56,56,56,5
3,96,07,911,6
2000300040006000
oooo
xoox
xoxo
xxoo
19,228,240,054,4
xxox
xxoo
xoox
xxxo
11,58,06,04,5
5070–AK71 3,0 5,3 6000 o x o x 24,0 x o o x 6,5
5071–AF715071–AG715071–AK71
4,54,54,5
4,35,27,9
300040006000
oxo
ooo
xox
xxo
20,827,240,0
oxx
oxo
xox
xxo
9,58,04,5
5072–AC715072–AF715072–AG715072–AK71
10,010,010,010,0
6,19,112,017,5
2000300040006000
oooo
ooxo
oxoo
xooo
28,840,054,480,0
xooo
xoxx
xxox
xxxo
11,59,57,55,5
5073–AC715073–AF715073–AG715073–AK71
7,07,07,07,0
4,36,48,112,5
2000300040006000
oxoo
oxox
xxxo
xooo
20,831,240,054,4
xxxx
xxox
xooo
xxxo
11,58,06,52,5
5074–AC715074–AF715074–AG715074–AK715074–SG715074–SK71
14,014,014,014,016,016,0
8,513,016,525,019,028,0
200030004000600040006000
oooooo
oxoooo
xooooo
oooooo
40,054,480,080,080,080,0
xoxxox
xxoxox
xooooo
xxxoxo
11,57,56,52,56,02,5
5076–AC715076–AF715076–AG715076–AK715076–SG71
18,018,018,018,020,5
11,516,521,532,024,5
20003000400060004000
xxooo
xoooo
ooooo
ooooo
48,868,080,080,080,0
oxxoo
xooxo
xoxox
xxooo
11,06,54,52,04,0
5100–AC715100–AF715100–AG715100–AK71
10,010,010,010,0
6,29,212,518,0
2000300040006000
xooo
xoxo
xxoo
oooo
31,240,054,480,0
xxoo
xoxo
xoxx
xxoo
11,56,55,54,0
5101–AC715101–AF715101–AG715101–AK71
15,015,015,015,0
9,414,517,526,5
2000300040006000
oooo
oxoo
xooo
oooo
40,054,480,080,0
xoxo
xxox
oxxo
xooo
8,05,54,52,0
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
1.2 Ajustes del regulador de intensidadMódulos de avance (VS) 10.00

VS
10.00
VS/1-11 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-7 Tabla de adaptación para módulo de potencia 6SN112–1AA00–0DA1 40/80 A, a continuación
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [A] n [r/min]Interruptores
I á [A]Interruptores
Kp(I)1FT Mo [Nm] Io [A] nnom [r/min]2 3 4 5
Imáx [A]6 7 8 9
Kp(I)
5102–AA715102–AC715102–AF715102–AG71
27,027,027,027,0
9,916,525,031,5
1200200030004000
oooo
oooo
xooo
oooo
40,080,080,080,0
xoox
xoox
xxxo
xxoo
11,59,54,02,5
5103–AC715103–AF715103–AG71
19,019,019,0
12,017,523,0
200030004000
ooo
xoo
ooo
ooo
54,480,080,0
xox
xox
ooo
xxo
8,06,02,5
5104–AA715104–AC715104–AF71
37,037,037,0
14,022,534,0
120020003000
ooo
xoo
ooo
ooo
54,480,080,0
xxx
xox
xoo
xxo
11,56,52,5
5106–AA715106–AC71
45,045,0
17,026,8
12002000
oo
oo
oo
oo
80,080,0
xo
xx
xx
xo
11,55,5
5108–AA715108–AC71
55,055,0
20,532,5
12002000
oo
oo
oo
oo
80,080,0
xx
xo
xx
xo
11,54,5
5132–AA715132–AC715132–SA71
60,060,070,0
22,535,526,0
120020001200
ooo
ooo
ooo
ooo
80,080,080,0
xxx
xox
xxx
xox
11,54,511,5
5134–AA715134–SA71
75,090,0
28,034,0
12001200
oo
oo
oo
oo
80,080,0
oo
oo
xx
xx
9,59,5
5136–AA71 85,0 31,5 1200 o o o o 80,0 o x o x 7,5
5138–AA71 105,0 39,0 1200 o o o o 80,0 o o o x 6,0
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
1.2 Ajustes del regulador de intensidadMódulos de avance (VS)10.00

VS
10.00
VS/1-12 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-8 Tabla de adaptación para módulo de potencia 6SN112–1AA00–0EA1 80/160 A
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [Α] n [r/min]Interruptores
I á [Α]Interruptores
Kp(I)1FT Mo [Nm] Io [Α] nnom [r/min]2 3 4 5
Imáx [Α]6 7 8 9
Kp(I)
4101–SK714101–SN71
20,020,0
33,039,0
60008000
oo
oo
oo
oo
160,0160,0
xx
ox
xo
oo
4,52,5
4102–SG714102–SK71
33,033,0
35,047,0
40006000
oo
oo
oo
oo
160,0160,0
xx
xo
ox
xo
8,04,5
4104–SG714104–SK71
45,045,0
46,060,0
40006000
oo
oo
oo
oo
160,0160,0
ox
xx
xo
oo
5,52,5
4106–SG71 59,0 56,0 4000 o o o o 160,0 x o x o 4,5
5064–AK71 4,5 8,0 6000 o o x x 41,6 x o x o 4,5
5066–AG715066–AK71
6,56,5
7,911,6
40006000
oo
xo
xo
xx
38,457,6
ox
oo
ox
xo
6,04,5
5071–AK71 4,5 7,9 6000 o x x x 38,4 x o x o 4,5
5072–AF715072–AG715072–AK71
10,010,010,0
9,112,017,5
300040006000
ooo
ooo
xox
xxo
41,657,680,0
oxo
oxx
xox
xxo
9,58,05,5
5073–AG715073–AK71
7,07,0
8,112,5
40006000
oo
ox
xx
xo
41,665,5
xo
oo
ox
xo
6,54,0
5074–AC715074–AF715074–AG715074–AK715074–SG715074–SK71
14,014,014,014,016,016,0
8,513,016,525,019,028,0
200030004000600040006000
oooxox
oxoxox
xxxoxo
xooooo
41,665,680,097,680,097,0
xxxxox
xxoxxx
xoooxo
xxxooo
11,58,06,52,55,52,5
5076–AC715076–AF715076–AG715076–AK715076–SG715076–SK71
18,018,018,018,020,520,5
11,516,521,532,024,536,0
200030004000600040006000
oxoooo
xoxoxo
oxoooo
xooooo
48,073,6108,8160,0108,8160,0
ooxooo
oxooxo
xooxxx
xxxooo
9,57,56,54,05,54,0
5100–AF715100–AG715100–AK71
10,010,010,0
9,212,518,0
300040006000
xxo
xxo
oxx
xoo
46,462,480,0
xxo
xoo
oox
xxo
8,06,54,0
5101–AC715101–AF715101–AG715101–AK71
15,015,015,015,0
9,414,517,526,5
2000300040006000
ooox
oxoo
xxxo
xooo
41,665,680,0136,0
oxxo
oooo
xoxx
xxoo
9,56,54,54,0
5102–AA715102–AC715102–AF715102–AG715102–SF715102–SG71
27,027,027,027,034,034,0
9,916,525,031,531,539,5
120020003000400030004000
xooooo
xoxoxo
oxoooo
xooooo
46,480,0108,8160,0108,8160,0
xoooxx
xoxxoo
xxxxxx
xxoooo
11,59,55,55,54,54,5
5103–AC715103–AF715103–AG71
19,019,019,0
12,017,523,0
200030004000
ooo
oox
oxo
xoo
57,680,0108,8
xox
xoo
oox
xxo
8,06,04,5
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
1.2 Ajustes del regulador de intensidadMódulos de avance (VS) 10.00

VS
10.00
VS/1-13 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-8 Tabla de adaptación para módulo de potencia 6SN112–1AA00–0EA1 80/160, a continuación
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [Α] n [r/min]Interruptores
I á [Α]Interruptores
Kp(I)1FT Mo [Nm] Io [Α] nnom [r/min]2 3 4 5
Imáx [Α]6 7 8 9
Kp(I)
5104–AA715104–AC715104–AF715104–SF71
37,037,037,048,0
14,022,534,044,0
1200200030003000
xooo
xxoo
xooo
oooo
62,4108,8160,0160,0
xoxo
xoox
xxox
xxxo
11,59,56,55,5
5106–AA715106–AC715106–AF715106–SF71
45,045,045,057,0
17,026,842,554,0
1200200030003000
oooo
oxoo
xooo
oooo
80,0108,0160,0160,0
xoxo
xxoo
xoxx
xxoo
11,57,54,54,0
5108–AA715108–AC715108–AF71
55,055,055,0
20,532,550,5
120020003000
ooo
ooo
xoo
ooo
80,0160,0160,0
xoo
xoo
xxx
xxo
11,59,54,0
5132–AA715132–AC715132–AF715132–SA715132–SC715132–SF71
60,060,060,070,070,070,0
22,535,547,526,041,055,5
120020003000120020003000
oooooo
xooxoo
oooooo
oooooo
108,8160,0160,0108,8160,0160,0
xxoxxx
xxxxxx
xoxxox
xxoxxo
11,58,05,511,58,05,5
5134–AA715134–AC715134–SA715134–SC71
75,075,090,090,0
28,047,034,056,0
1200200012002000
oooo
xoxo
oooo
oooo
108,8160,0108,8160,0
xxxx
xoxo
xoxo
xoxx
11,56,511,56,5
5136–AA715136–AC715136–SA715136–SC71
85,085,0110,0110,0
31,547,541,061,5
1200200012002000
xoxo
oooo
oooo
oooo
136,0160,0136,0160,0
xxxx
xoxo
xoxo
xxxo
11,56,511,56,5
5138–AA715138–SA71
105,0140,0
39,052,0
12001200
oo
oo
oo
oo
160,0160,0
xx
xx
xx
xx
11,511,5
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
1.2 Ajustes del regulador de intensidadMódulos de avance (VS)10.00

VS
10.00
VS/1-14 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-9 Tabla de adaptación para módulo de potencia 6SN112–1AA00–0FA1 100/200 A
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [Α] n [r/min]Interruptores
I á [Α]Interruptores
Kp(I)1FT Mo [Nm] Io [Α] nnom [r/min]2 3 4 5
Imáx [Α]6 7 8 9
Kp(I)
4101–SK714101–SN71
20,020,0
33,039,0
60008000
ox
xo
oo
oo
136,0170,0
xx
xx
oo
oo
2,52,0
4102–SG714102–SK71
33,033,0
35,047,0
40006000
xo
oo
oo
oo
170,0200,0
oo
ox
xx
xo
9,55,5
4104–SG714104–SK71
45,045,0
46,060,0
40006000
oo
oo
oo
oo
200,0200,0
xx
ox
oo
xo
6,52,5
4106–SG71 59,0 56,0 4000 o o o o 200,0 o x x o 5,5
5066–AK71 6,5 11,6 6000 o x o x 60,0 x o x o 4,5
5072–AG715072–AK71
10,010,0
12,017,5
40006000
oo
xx
ox
xo
60,082,0
xo
xx
ox
xo
8,05,5
5073–AK71 7,0 12,5 6000 o x o x 60,0 o o x o 4,0
5074–AF715074–AG715074–AK715074–SG715074–SK71
14,014,014,016,016,0
13,016,525,019,028,0
30004000600040006000
ooooo
xxoxo
oxxxx
xoooo
60,082,0100,082,0100,0
xxxox
xoxox
ooooo
xxoxo
8,06,52,56,02,5
5076–AC715076–AF715076–AG715076–AK715076–SG715076–SK71
18,018,018,018,020,520,5
11,516,521,532,024,536,0
200030004000600040006000
oxoooo
oxoxox
xxxoxo
xooooo
52,078,0100,0136,0100,0136,0
xxoxxx
xxxxox
xoxoxo
xxoooo
11,58,05,52,54,52,5
5100–AF715100–AG715100–AK71
10,010,010,0
9,212,518,0
300040006000
xox
xxo
xox
xxo
46,060,092,0
xox
xoo
oox
xxo
8,06,04,5
5101–AC715101–AF715101–AG715101–AK71
15,015,015,015,0
9,414,517,526,5
2000300040006000
xoxo
xxox
xoxo
xxoo
46,060,092,0136,0
oooo
oooo
xoox
xxxo
9,56,06,04,0
5102–AA715102–AC715102–AF715102–AG715102–SF715102–SG71
27,027,027,027,034,034,0
9,916,525,031,531,539,5
120020003000400030004000
xxooxo
xxoxxx
xxxooo
xooooo
46,078,0100,0136,0122,0136,0
xoxxoo
xoooxo
xxxxxx
xxoooo
11,59,54,54,55,54,0
5103–AC715103–AF715103–AG71
19,019,019,0
12,017,523,0
200030004000
oxx
xox
oxo
xoo
60,092,0122,0
oxo
oox
xox
xxo
9,56,55,5
5104–AA715104–AC715104–AF715104–SF71
37,037,037,048,0
14,022,534,044,0
1200200030003000
oooo
xoxx
oxoo
xooo
60,0100,0136,0136,0
xxox
xxxo
xoxx
xxoo
11,58,05,54,5
5106–AA715106–AC715106–AF715106–SF71
45,045,045,057,0
17,026,842,554,0
1200200030003000
xxoo
xxoo
xooo
oooo
78,0122,0200,0200,0
xxox
xxxo
xoxx
xxoo
11,58,05,54,5
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
1.2 Ajustes del regulador de intensidadMódulos de avance (VS) 10.00

VS
10.00
VS/1-15 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-9 Tabla de adaptación para módulo de potencia 6SN112–1AA00–0FA1 100/200 A, a continuación
Servomotor Límite de intensidad 1) Ganancia regulador deintensidad
1FT M [Nm] I [Α] n [r/min]Interruptores
I á [Α]Interruptores
Kp(I)1FT Mo [Nm] Io [Α] nnom [r/min]2 3 4 5
Imáx [Α]6 7 8 9
Kp(I)
5108–AA715108–AC715108–AF71
55,055,055,0
20,532,550,5
120020003000
xoo
oxo
xoo
ooo
92,0136,0200,0
xxx
xxo
xox
xxo
11,58,04,5
5132–AA715132–AC715132–AF715132–SA715132–SC715132–SF71
60,060,060,070,070,070,0
22,535,547,526,041,055,5
120020003000120020003000
oxooxo
oooooo
xooxoo
oooooo
100,0170,0200,0100,0170,0200,0
xoxxox
xooxoo
xxoxxo
xxxxxx
11,59,56,511,59,56,5
5134–AA715134–AC715134–SA715134–SC71
75,075,090,090,0
28,047,034,056,0
1200200012002000
xoxo
xoxo
oooo
oooo
122,0200,0122,0200,0
xxxx
xxxx
xoxo
xxxx
11,58,011,58,0
5136–AA715136–AC715136–SA715136–SC71
85,085,0110,0110,0
31,547,541,061,5
1200200012002000
oooo
xoxo
oooo
oooo
136,0200,0136,0200,0
xxxx
xxxx
xoxo
xxxx
11,58,011,58,0
5138–AA715138–SA71
105,0140,0
39,052,0
12001200
xx
oo
oo
oo
170,0170,0
xx
xx
xx
xx
11,511,5
Definición: o = Interruptor en posición base OFFx = Interruptor en posición ON
1) El valor indicado es la intensidad máxima permitida de la combinación parte de potencia/motor respectiva. Depen-diendo de los órganos mecánicos accionados puede ser necesaria una reducción del valor indicado.
1.2 Ajustes del regulador de intensidadMódulos de avance (VS)10.00

VS
10.00
VS/1-16 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.2 Ajustes del regulador de intensidadMódulos de avance (VS)
Espacio para sus notas

VS
10.00
VS/2-17 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Optimización del regulador de velocidad
Los alisamientos (filtros) suplementarios en el lazo de regulación de velocidad(amortiguación de resonancias mecánicas) se describen en el cap. 3. Marcha aseguir para optimizar el regulador de velocidad:
1. Adaptación del taco
2. Ganancia Kp
3. Tiempo de acción integral TN
4. Adaptación TN (de ser necesaria)
5. Limitación de la acción I (de ser necesaria)
6. Compensación de deriva (Offset)
Para realizar la optimización del regulador de velocidad, el equipo deberá estarbajo tensión según apts. 2.1, 2.2, 2.3 y 2.8 cap. 7 “Encendido”.
Las indicaciones de divisiones para los potenciómetros (en las tablas de ajuste)se definen como sigue:
8 9/10
76
5
43
2 0/1
5
123
4
987
6
0
10
Este gráfico representa el ajuste en7 divisiones.
Módulos de avance (VS)2 Optimización del regulador de velocidad
07.94
2

VS
10.00
VS/2-18 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.1 Adaptación del taco
Para motores con taco que generen una tensión ≤ 16,5 V es necesario proc-eder conforme al apt 1.1.
Potenciómetro Margen de ajuste
T 0,7 nnom nreal N 2,2 nnom
0 1 2 3 4 5 6 7 8 9 10
Pot. taco (div)
0,6
0,8
1
1,2
1,4
1,6
1,8
2
2,2nreal N/ nreal
Figura 2-1 Adaptación del taco
Ampliación del margen de ajuste mediante R3 y R10 (sólo en interfaseconfortable).
Función Componente Estado
nreal N > 0,7 nnom Aumentar R3 0 Ω (estado de fábrica)
nreal N < 2,2 nnom Añadir R10 abierta (estado de fábrica)
Módulos de avance (VS)2.1 Adaptación del taco

VS
10.00
VS/2-19 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.2 Ajuste de la ganancia proporcional Kp sin adaptación
La ganancia proporcional Kp del regulador de velocidad se ajusta con el poten-ciómetro Kp. La resistencia R50 permite ampliar el margen (sólo interfase con-fortable; R50 = 68 kΩ (estado de fábrica)). La ganancia ajustada con el poten-ciómetro Kp es afectada también por la posición del potenciómetro TN.
Kp
0 1 2 3 4 5 6 7 8 9 10
Potenc. TN
Centro
Tope iz-quierdo
Tope de-recho
Posición potenciómetro Kp
0
20
40
60
80
100
120
140
160170
Figura 2-2 Ganancia proporcional Kp en función de los potenciómetros Kp y TN
Módulos de avance (VS)2.2 Ajuste de la ganancia proporcional Kp sin adaptación

VS
10.00
VS/2-20 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3 Ajuste del tiempo de acción integral TN sin adaptación
El tiempo de acción integral del regulador de velocidad se ajusta con el poten-ciómetro TN; ampliación de margen posible con C2 (sólo interfase confortable).
TN in ms
Posición potenciómetro TN
0
10
20
30
4045
0 1 2 3 4 5 6 7 8 9 10
Figura 2-3 Tiempo acción integral TN en función del potenciómetro TN
Módulos de avance (VS)2.3 Ajuste del tiempo de acción integral TN sin adaptación

VS
10.00
VS/2-21 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.4 Tiempo de acción integral con adaptación (de ser necesaria)
La adaptación se activa y preajusta con resistencia R34 (sólo interfase confor-table), o con interruptor S3.5 (S6.5 para 2º eje) en la interfase estándar.
R34 = abiertaR34 = colocada
Adaptación anulada (estado de fábrica)Adaptación conforme a figuras siguientes
TN
TNadapt
Potenc. TN
R34 + Potenc. ADAPT
nx2 nx1
nx
Adaptaciónanulada
Adaptaciónactiva plena
Zona detransición
Figura 2-4 Dependencia del tiempo de acción integral
nx = ncons + nreal
0,9
0,7
0,5
0,3
0,10
TNadapt/TN
R34 = 10 k
R34 = 0 ó interfaseestándar
Posición del potenciómetro ADAPT
0 1 2 3 4 5 6 7 8 9 10
Figura 2-5 Dependencia de la adaptación TN
Módulos de avance (VS)2.4 Tiempo de acción integral con adaptación (de ser necesaria)

VS
10.00
VS/2-22 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.5 Ganancia proporcional con adaptación (sólo interfaseconfortable)
Importante
En la zona de transición pueden aparecer decalajes del offset.
La adaptación se activa y preajusta con R38 (de ser necesario):
R38 = abiertaR38 = colocada
Adaptación anulada (estado de fábrica)Adaptación conforme a figuras siguientes
Kp
Kp
Kpadapt
R38
R50 + Potenc. Kp
nx2 nx1
nx
Adaptaciónanulada
Adaptaciónactiva plena
Zona detransición
Figura 2-6 Dependencia de la ganancia proporcional Kp de la velocidad de giro
nx = ncons + nreal
0 500 1000 1500 2000 2500
Kpadapt/Kp
35
25
15
50
Resistencia fija R38 en
Figura 2-7 Adaptación de Kp en función de R38 en la zona “Adaptación activa plena”
Módulos de avance (VS)2.5 Ganancia proporcional con adaptación (sólo interfase confortable)
03.96

VS
10.00
VS/2-23 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.6 Ajuste del margen de adaptación (normalmente no necesario)
Las resistencias siguientes permiten ajustar el margen de adaptación como sigue:
R40 Interfase confortableR543 Interfase estándar 1er eje (a partir de ref. 6SN1118–0AD11–0AA1)R544 Interfase estándar 2º eje (a partir de ref. 6SN1118–0AE11–0AA1)
R40 = abiertaR40 = colocada
Margen de adaptación máx. (estado de fábrica)Adaptación reducida según figura siguiente
150
130
110
90
70
50
30
100
0 50 100 150 200 250 300 350 400
R40 en k
nx en mV
Adap-taciónactivaplena
Zona de transición Adapta-ción an-ulada
Figura 2-8 Margen de adaptación
nx = ncons1 + nreal
2.7 Limitación de la acción I del regulador de velocidad (sólo interfase confortable)
R52 Interfase confortableR547 Interfase estándar 1er eje (a partir de ref. 6SN1118–0AD11–0AA1)R550 Interfase estándar 2º eje (a partir de ref. 6SN1118–0AE11–0AA1)
R52 = abiertaR52 = 0 Ω
Acción I activa plena (estado de fábrica)Acción I anulada
Para limitar la acción I del regulador de velocidad es posible colocar una R52entre 100 kΩ y 2 MΩ, p. ej. en caso de efectos Slip-Stick.
2.8 Compensación de deriva (Offset)
Ajuste por potenciómetro Drift para ncons = 0 (B.56 y B.14 cortocircuitados)
Potenciómetro Drift Margen de ajuste 30 mV
Módulos de avance (VS)2.8 Compensación de deriva (Offset)

VS
10.00
VS/2-24 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avance (VS)
Espacio para sus notas

VS
10.00
VS/3-25 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Puesta en marcha de las funciones adicio-nales
3.1 Elementos de ajuste con interfase estándar
Elementos de ajuste bloques S2 y S3 ó S5 y S6 para segundo eje
InterruptoresS2/S5
DIL 10x
OFF ON
1 Giro horario motor con consignadel regulador de velocidad posi-tiva (eje motor lado A) en B.56/14
Giro antihorario motor con con-signa del regulador de velocidadpositiva (eje motor lado A)1) enB.56/14
2...5 Normalización de intensidad(Imáx=100 %)1)
Normalización de intensidad(Imáx = 23 %)
6...9 Ganancia reg. de intens. (0,5)1) Ganancia reg. de intens. (11,5)
10 Regulación de velocidad1) Regulación de intensidad
InterruptoresS3/S6DIL 8x
Función OFF ON
1 Alisamiento de consignade velocidad
sin alisamiento1) con T = 2,2 ms
2 Alisamiento veloc. real sin alisamiento1) con T = 280 µs
3 Alisamiento reg. de vel. sin alisamiento1) con T = 370 µs
4 Alisamiento cons. de int. sin alisamiento1) con T = 110 µs
5 Adaptación reg. de vel. OFF1) ON
6 Listo/fallo2) Señalización Listo Señalización Fallo
7 Maestro/esclavo3)4) Maestro1) Esclavo4)
8 Regulación de intens. con acción I sin acción I1)
1) Estado de fábrica2) ¡Importante!
Actúa sobre el relé BB del módulo NE/ÜW. Si se opera con mezcla de interfases confortable y estándar o sólo coninterfase estándar, en caso de falta de señal de desbloqueo o de fallo en los ejes estándar se desexcitará el relé BBdel módulo NE.
3) Función sólo en la ejecución de 2 ejes.4) En modo con intensidad regulada, el eje esclavo deberá operar con acción I desbloqueada.
Módulos de avance (VS)3.1 Elementos de ajuste con interfase estándar
12.9404.97
3

VS
10.00
VS/3-26 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Las siguientes funciones adicionales pueden ajustarse, mediante componentessoldables en la tarjeta base (a partir de ref. 6SN1118–0AD11–0AA1 (1 eje) o apartir de ref. 6SN1118–0AE11–0AA1 (2 ejes).
Función Comp. eje 1 Comp. eje 2 Margen de valores
Alisamiento regulador n C231 C235 0 ... 100nF
Alisamiento regulador ncons C232 C236 0 ... 2.2 F
Alisamiento nreal C233 C237 0 ... 100nF
Alisamiento ncons C234 C238 0 ... 100nF
Temporizador “Regulador n en tope” C239 C240 0 ... 2.2 F
Adaptación taco R539, R540, R541 R536, R537. R538 0 ... k, 0.1%, 25ppm/k
Frecuencia pulsación PWM R542 R542 62 k ...
Margen de adaptación R543 R544 0 ... k
Adaptación consigna de velocidad R545 R546 0 ... k
Limitación acción I reg. n R547 R550 100 k ... 2 M
Compensación eléc. peso pos./neg. R548/R549 R551/R552 20 k ...
Umbral respuesta de vigilancia I2t R553 R554 0 ... k
Estos componentes se montarán en los puntos para ello previstos: resistenciasde película metálica axiales del tipo 0204 (RM 7.62 mm) o condensadores MKTradiales (RM 5.08 mm). Para adaptar el taco es necesario considerar que las(3) resistencias tienen una precisión real de 0.1% y un coeficiente de tempera-tura (TC) de < 25 ppm/k.
El uso de material no adecuado puede dañar el módulo.
Los trabajos de soldadura en la tarjeta deberán realizarlos sólo personal ade-cuadamente formado (observando las directrices antiestáticas).
Indicación
Importante
Módulos de avance (VS)3.1 Elementos de ajuste con interfase estándar
04.97

VS
10.00
VS/3-27 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.1.1 Dimensionamiento de los elementos de ajuste (interfase estándar)a) Alisamientos (filtros)Regulador n: T=C231(C235) 78 kncons: T=C232(C236) 10 knreal: T=C233(C236) 10 k (función de ajuste del pot. de taco)Icons: T=C234(C238) 5 k
b) Temporizador “Regulador n en tope”La temporización de vigilancia vale de forma estándar 230 ms; incorporando C239(C240) puede porlongarse según necesidad. Para ello, se aplica la relación:
C239 (C240)
FTad.= )(1.15+ 200 ms
c) Adaptación del tacoPara las diferentes tensiones tacométricas rige el esquema equivalente siguiente:
4 k
Rx
UtacoX
8 k
20 k
La tensión tacimétrica Utaco vale normalmente 40 Va la velocidad nominal; de ello resulta un tensiónUtacoX de 10 V. En el caso de velocidad de giro útilque difiera mucho de la velocidad nominal del mo-tor, este criterio permite cambiar el ajuste.Rige la fórmula de conversión siguiente:
(5 k
1–
UtacoUtacoX
) –7.5 k
14 (Utaco
UtacoX)
][Rx=
Utaco
d) Frecuencia de pulsación PWMSi aparecen problemas de ruido en el motor (silbidos), es posible modificar la frecuen-cia de pulsación del ondulador de forma común para ambos ejes (fig. 3–1).Es importante considerar que al incrementar la frecuencia de pulsación se re-duce también la intensidad disponible ( In, Imax) (v. PJU capt. 4.1).
La limitación de I2t está dimensionada para la frecuencia de pulsación ajustada enfábrica de 3,3 kHz y una temperatura ambiente máx. de 40C. Si se sobrepasanestos valores (frecuencia de pulsación y/o temperatura ambiente), entonces esnecesario adaptar el umbral de respuesta de dicha protección (v. fig. 3-2).
FrecuenciaValor típ. en serie
R542 [k]
Fre
cuen
cia
[kH
z]
7,0
6,5
6,0
5,5
5,0
4,5
4,0
3,5
3,0
2,5
0
7,5
8,0
10 100 1000 10000
Figura 3-1 Frecuencia de reloj del ondulador pulsado
Módulos de avance (VS)04.973.1 Elementos de ajuste con interfase estándar

VS
10.00
VS/3-28 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
e) Adaptación de consigna de velocidadSi el margen de ajuste del potenciómetro del taco (para rangos pequeños develocidad) es insuficiente, entonces puede recurrirse a adaptar el margen utili-zando el divisor de tensión de consigna. Rige el siguiente esquema equiva-lente:
virt. M
Rx
Regulador n20 k 20 k
Ncons
Para R545 (R546) resulta la fórmula siguiente:
ndeseadoRx=10 k nnom – ndeseado
f) Limitación de la acción I del regulador de n (v. 2.7)Incorporando R547 (R550) es posible limitar la acción I máxima del reguladorde velocidad.
g) Compensación eléctrica de pesoEl valor a ajustar para la compensación eléctrica de peso resulta de la consignade intensidad IconsCpes medible en la hembrilla T estando desbloqueado el ejeparado (Ncons=0):
R= IconsCpes
10 k10 VAtención: IconsCpes 5V R 20 k!
Una vez incorporado dicho componente, con el eje bloqueado, en la hembrillaT deberá poderse medir el valor con el mismo signo.
h) Umbral de respuesta de la vigilancia I2tLa vigilancia I2t limita la consigna de intensidad a un valor admisible térmica-mente para el accionamiento. El umbral de respuesta está ajustado al 55% dela intensidad de punta de la parte de potencia y puede reducirse si se deseaincorporando R553 (R554) de acuerdo a la característica siguiente:
1 10 100R553 (R554) [k]
50
40
30
20
10
0
60
Umbral de respuesta vigilancia I2t
1000
Um
bral
res
pues
ta [%
I_lím
ite]
Figura 3-2 Umbral de respuesta vigilancia I2t
Módulos de avance (VS) 04.973.1 Elementos de ajuste con interfase estándar
04.97

VS
10.00
VS/3-29 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.2 Elementos de ajuste con interfase confortable
Elementos de ajuste en unidad de ajuste;borne = H (high, nivel alto) → puenteado con B.9; borne = L (low, nivel bajo) → abierto
Función Componente(s) Efecto
Listo/falloBornes relé 672/673/674
R33 = 0 Ω (estado de fábrica)R33 = abierto
Señalización ListoSeñalización Fallo
Regulación de velocidad/intensidad(ajuste fijo por interruptores)
S2: 10 = OFF (estado de fábrica)S2: 10 = ON
Regulación de velocidadRegulación de intensidad
Regulación de velocidad/intensidad(seleccionada por borne)
R14 = 0 Ω1); borne 22 = LR14 = 0 Ω; borne 22 = H
Regulación de velocidadRegulación de intensidad
Consigna adic. 1 vía B.22 = HR16 (estado de fábrica = abierta)2)
R17 (estado de fábrica = abierta)R18 (estado de fábrica = abierta)
Divisor de tensión en 10 VDivisor de tensión en –10 VDivisor de tensión en punto de ref.
Consigna adic. 2 vía B.23 = HR21 (estado de fábrica = abierta)2)
R19 (estado de fábrica = abierta)R22 (estado de fábrica = abierta)
Divisor de tensión en 10 VDivisor de tensión en –10 VDivisor de tensión en punto de ref.
Regulación de intensidad con/sin ac-ción I
R1 = 0 Ω (estado de fábrica)R1 = abierto
Acción I anulada, regulador PAcción I activa, regulador PI
Bloqueo reguladores e impulsos víaborne 65
R13 = abierto (estado de fábrica)R13 = 0 Ω
retardadoinstantáneo
Modo maestro/esclavo: Modo maestro R42 + R44 = 0 Ω, S2: 10 = OFF Modo maestro, B.258 = Salida
Modo esclavo R44 = 0 Ω, R1 + R42 = abierto,S2: 10 = ON
Modo esclavo, B.258 = entrada
Temporizador Regulador de n en topeR54 = 360 kΩ (estado de fábrica)R54 según selección
t = 230 mst [ms]
R54 [kΩ] =0,56
– 47
Vigilancia de regulador de n en topeR32 = 0 Ω (estado de fábrica)R32 = abierto
Vigilancia activaVigilancia anulada
Inversión sentido de giro(sentido con consigna positiva enB.56/14)
S2: 1 = ON (estado de fábrica)
S2: 1 = OFF
Giro antihorario motor eje lado AGiro horario motor eje lado A
Alisamiento regulador de velocidad C3 (estado de fábrica = abierta) τ = C3 68 kΩ
Alisamiento consigna de velocidad C4 (estado de fábrica = abierta) τ = C4 10 kΩ
Alisamiento velocidad real C5 (estado de fábrica = abierta) τ = C5 5 kΩ
Alisamiento consigna de intensidad C6 (estado de fábrica = abierta) τ = C6 1 kΩ
Adaptación consigna velocidad2)
(sólo B.56/14)R5 = 20 kΩ (estado de fábrica) |100% nISTN|=11 ... 5V
Adaptación consigna de intensidad R42 (estado de fábrica = 0 Ω)2) Icons10 V
Marcha a tope fijo(ajuste fijo vía R12)
R12 según fig. 3-3Condición: B.96 puenteado con B.44
Limitación según fig. 3-3Vigilancia regulador n anulada
1) Estado de fábrica: R14 = abiertaNcons10 V2) R= 40k
NnomNmáx
( )– 0,5
Módulos de avance (VS)04.973.2 Elementos de ajuste con interfase confortable

VS
10.00
VS/3-30 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Función Componente(s) Efecto
Marcha a tope fijo(variable vía B.96)
R12 = abierto (est. de fábrica)Tensión en B.96 según fig. 3-4
Limitación según fig. 3-4,Vigilancia regulador n anulada
Modo de preparación(centralmente vía B.112 enmódulo NE)
R12 según fig. 3-3B.112 = abierta (est. de fáb. B112 unido a B.9)
Limitación según fig. 3-3,Vigilancia regulador n anulada
Reducción de intensidad altranscurrir la temporización Re-gul. de n en tope
R2 según fig. 3-5R32 = abierta
Reducción según fig. 3-5Vigilancia regulador n anulada
Reducción de intensidad altranscurrir el temporizador I2t
R2 = abierta (estado de fábrica)R32 = abierta
Servicio S1 = 1,1 Inom
Umbral de respuesta I2t R9 = 30 kΩ (estado de fábrica)R9 según fig 3-6
Servicio S1 = 1,1 InomLimitación según fig. 3-6
Compensación eléctrica depeso1)
R46 + R48 = abierta (estado defábrica)R46 con. Icons neg. en hemb. TR48 con. Icons pos. en hemb. T
sin compensación de pesoIcons adicional según fig. 3-7Icons adicional según fig. 3-7
Adaptación del taco1) R6, R7, R8 tolerancia 0,1% (5k
1–
UtacoUtacoX
) –7.5k
14
(UtacoUtacoX )
][Rx=
Frecuencia de pulsación R542 v. fig. 3-1
[%]Icons
Imáx
0,1 1,0 10,0 100,0 1000,0R12 [k]
100
90
80
70
60
50
40
30
20
10
0
Valorfinal1%
Figura 3-3 Limitación de intensidad en función de R12,
30 V Borne 96 12 V
1) v. apt. 3.1.1
Módulos de avance (VS) 04.973.2 Elementos de ajuste con interfase confortable

VS
10.00
VS/3-31 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
100
90
80
70
60
50
40
30
20
10
0
1 3 42 6 875 9 100 UB.96[V]
[%]Icons
Imáx
Valorfinal1%
Figura 3-4 Limitación de consigna de intensidad en función de la tensión en B.96 (R12 =abierta)
[%]
01,0
R2 [kΩ]
Icons
Imáx
100
90
80
70
60
50
40
30
20
10
10,0 100,0
Valorinicial1%
Figura 3-5 Limitación de consigna de intensidad en función de R2
Módulos de avance (VS)04.973.2 Elementos de ajuste con interfase confortable

VS
10.00
VS/3-32 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
R9 [kΩ]
Iperm
Inom
100
90
80
70
60
50
40
30
20
10
10,0 100,00
110
1000,0
Zona prohibida[%]
Figura 3-6 Umbral de respuesta de la vigilancia I2t en función de R9
1,00,80,60,40,3
0,2
0,10,080.060,040,03
0,02
0,01
55,6
6,8 10 15 22 27 3947
5668
100 150 220 390470
680 1000
Icompens. pedo/Imáx
R46 óR48 [k]
Zona prohibida
Figura 3-7 Consigna adicional de intensidad para compensación eléctrica de peso
Frecuencia de pulsación del ondulador PWMEn caso de problemas de ruido (silbido) en el motor, incorporando R369 en latarjeta base es posible adaptar la frecuencia de pulsación del ondulador.En este caso es imprescindible considerar que cuando se incrementa lafrecuencia de pulsación se reduce la intensidad disponible (In, Imáx)(v. PJU capt. 4.1)De fábrica, la limitación de I2t está ajustada para una frecuencia de pulsacióndel 3,3 kHz y una temperaturta ambiente máx. de 40 C. Si se superan estosvalores (frecuencia de pulsación y/o temperatura ambiente) es necesario adap-tar el umbral de respuesta (v. fig. 3-2).Es válida la característica mostrada en la figura 3-1.
Módulos de avance (VS) 04.973.2 Elementos de ajuste con interfase confortable

VS
10.00
VS/4-33 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Interfases de consigna
Definiciones:
X Optimo considerando las propiedades de la entrada de consigna
Posible
Prohibido y en parte imposible
Tabla 4-1 Consigna principal – consignas adicionales
Modo Consigna B.56/14 B.24/20Consigna
internaB.22
Consignainterna
B.23
HembrillaNZ B.258
Regulación de velo-cidad
Cons. principal Xcidad
Cons. adicional X X X X
Regulación de inten-sidad
Cons. principal Xsidad
Cons. adicional X
Esclavo con regul. IEntrada consigna de
Cons. principal XEntrada consigna deintensidad Cons. adicional
Opción HSAModo HSA
Cons. principal XModo HSA
Cons. adicional
Opción HSAEje C
Cons. principal XEje C
Cons. adicional X X
Tabla 4-2 Sentido de giro del motor con consigna positiva y S2.1 = ON
Modo B.56/14 B.24/20 B.22 B.23 HembrillaNZ
Maestro/esc-lavo
B.258
Regulación de ve-antihorario horario
R16/18 horario R19/22 horarioantihorario
Regulación de velocidad
antihorario horarioR17/18 antihor. R21/22 antihor.
antihorario
Regulación de in-horario
R16/18 horario R19/22 horario horarioRegulación de intensidad
horarioR17/18 antihor. R21/22 antihor.
horario(esclavo)
Visto desde el lado A del eje del motor
Módulos de avance (VS)4 Interfaces de consigna
12.94
4

VS
10.00
VS/4-34 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avance (VS)4 Interfaces de consigna
Espacio para sus notas

VS
10.00
VS/5-35 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Puesta en marcha con opción de cabezal(HSA)
Ajustes de los parámetros de regulación para eje C en la unidad de ajustes; yde los parámetros de regulación para modo cabezal en la tarjeta opcional.
Las componentes a modificar para la opción de cabezal están dispuestas enespadines (disposición, v. cap. 9).
Las divisiones indicadas para los potenciómetros (en las tablas de ajustes) sedefinen como sigue:
8
9/10
76 5 4
32
0/1
5
1
2
34
9
8
76
El ajuste aquí representado se corres-ponde con 7 divisiones.
10 0
5.1 Ajustes preliminares
Precaución
Modificaciones en la unidad de ajuste: retirar R4, R5 y R54 y eventualmenteC4 (no colocado de fábrica).¡Si no se toman estas precauciones pueden producirse movimientos intempe-stivos de los ejes!
5.1.1 Ajustes con la tarjeta de regulación desenchufada
Tabla 5-1 Tiempo de aceleración de 0 V a 10 V en s vía B.56/14, ajuste vía potenciómetroR20 y B.102
0 1 2 3 4 5 6 7 8 9 10
B.102 abierto 0.01 0.11 0.21 0.31 0.4 0.5 0.6 0.7 0.8 0.9 1.11
B.102 en B.9 0.1 1.08 2.07 3.06 4.04 5.03 6.02 7.01 8.01 9.04 11.05
El margen de ajuste del tiempo de aceleración definido por R20 puede modifi-carse actuando sobre R27/R60.
Tiempo deaceleración
Módulos de avance (VS)04.97
5
5.1 Ajustes preliminares

VS
10.00
VS/5-36 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
100
13
R214
R213
Zona “potenciaconstante”
R76
I/Imáx
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
n/nnom en %
R225
23 70 100
Figura 5-1 Limitación de par
Tabla 5-2 Inicio ajustable por R214 de la zona “potencia constante” referida a nmáx =10 V en %
Pot. R214 0 1 2 3 4 5 6 7 8 9 10
Inicio de la zonaen %
70 65 60 55 50 45 40 35 30 26 22
Tabla 5-3 Desviaciones de la potencia ajustada con relación a la potencia constanteen el punto nmáx en % ajustable por R213
Pot. R213 0 1 2 3 4 5 6 7 8 9 10
Desviación en % +20 0 –20
Tabla 5-4 Limitación constante de par Icons/Imáx en % vía R76 (sobre espadines), defábrica R76 no está colocada
R76 en kΩ 3 4,3 6,2 8,2 11 15 18 22 27 36
Icons/Imáx en % 10 20 30 40 50 60 70 80 90 100
Los valores intermedios pueden determinarse por interpolación
Tabla 5-5 Limitación de par en función de la velocidad Icons/Imáx en % ajustable víaR225 (sobre espadines) para R226 = 20 kΩ
R225 en kΩ 2,4 4,7 7,5 11 16 22 30 47 70 100
Icons/Imáx en % 1 10 20 30 40 50 60 70 80 85
De forma estándar, la relación Icons/Imáx está ajustada al 12 %. Los valores in-termedios pueden calcularse por interpolación.
Limitación de par
Módulos de avance (VS) 04.975.1 Ajustes preliminares

VS
10.00
VS/5-37 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-6 Normalización vía potenciómetro R903 (de fábrica, factor = 1)
Pot. R903 0 1 2 3 4 5 6 7 8 9 10
Factor de normali-zación
3 2,8 2,6 2,4 2,2 2,0 1,8 1,6 1,4 1,2 1
Selección de bornes por resistencias 0 Ω
B.110
R170 R1061)R98
R103 R971)
B.108 B.115 B.114 B.216 B.214 B.127 B.126
R1051) R991)R1081)
R1711) R107 R1041)
nreal = ncons3)|Ireal |> Ix2) |nreal |< nmín
3) |nreal |< nx3)
Figura 5-2 Funciones de relé
1) Estado de fábrica2) Relé desexcitado3) Relé excitado cuando se cumpla la función.
Normalización de
la indicación M/P
Función de relé,salida de los de-tectores del límite
Módulos de avance (VS)04.975.1 Ajustes preliminares

VS
10.00
VS/5-38 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-7 Funciones de límite
Detectorde límite
Margen Ajustes en valores fijos
IrealIxPot. R211
4,5 %...100 %
Alisam. en caso de vibración de relé = C87Inhibición: salto ncons 31 mV,
R180 = 0 ΩHistéresis = 10 mV,R179 = 2 kΩ
Pot. R211 0 1 2 3 4 5 6 7 8 9 10
Ix =en % 100 90 81 71 62 52 43 33 24 14 4.5
nreal
<nmínPot. R10
0,3 %...1,7 % nmáx
Alisam. en caso de vibración de relé = C68,Histéresise 400 mV (estado de fábrica),inactivo para eje C: R100 = 0 Ω (estado defábrica)R274 = 300 kΩ corresponde a histéresis20 mV
Pot. R10 0 1 2 3 4 5 6 7 8 9 10
nmín=en % 0.3 0.44 0.58 0.73 0.87 1.02 1.16 1.31 1.45 1.59 1.74
nrealnxPot. R43
3 %...100 % nmáx Alisam. en caso de vibración de relé = C68
Pot. R43 0 1 2 3 4 5 6 7 8 9 10
nx=en % 3,4 13 23 34 44 54 64 74 84 94 104
ncons =
ncons*sólo en modo cabezal
Umbral de vigilancia:Desviación ncons20 mV, R179 = 2 kΩHistéresis = 10 mV, R180 = 0 Ω Prolongación = 32 ms, C20 = 1 µF
Tabla 5-8 Ajustes en valores fijos
Función Componente(s) Acción
Corrección generador de rampas R270 = 0 Ω (estado de fábrica)R270 = retirada
Corrección activaCorrección inactiva
Alisamiento de consigna de veloci-dad
C40 τ [ms] = 10 C40 [µF]
Consigna correctora para modo ca-bezal (B.65 decelera a consignaB.24)2)
R900 + R901 = retirada (estado defábrica)R900 + 901 = 40 kΩ
No hay consigna correctoraConsigna correctora vía B.24/20
Indicación de valores reales de in-tensidad/potencia
R160 = retirada, R207 = 1 kΩ (estado defábrica)R160 = 1 kΩ, R207 = retirada
Indicación de M/P
Indicación de Ireal
Modo eje C/cabezalConsigna cabezal: B.56/14Consigna eje C: B.24/20 óconsigna fija vía B.22 ó B.23
B.61 = retiradaB.61 conectado a B.9
Modo cabezalModo eje CConmutación, v. fig. 5-3
Velocidad de conmutación B.61 R77/78 1)
1) Velocidad de conmutación =R77 (47000 – R78 15)
R77 47 kW + R78 (R77 + 47 kW) [%]
2) Precaución: ¡El bloqueo de impulsos sólo interviene al sobrepasarse el umbral noff!
Funciones envalores fijos
Módulos de avance (VS) 04.975.1 Ajustes preliminares

VS
10.00
VS/5-39 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
R77 y R78
Zona frenadoB.61 = H (respecto B.9)
Modo cabezalB.61 = abierto
Pt. de conmutaciónde parámetros
Velocidad
n1
n2
Velocidadde conmuta-ción
n1 = Velocidad cabezaln2 = Velocidad eje C
Figura 5-3 Conmutación en el borne 61
Parámetros del regulador, ajuste de la deriva, entrada de consigna
Desbloqueo de la adaptación
Habilitación del temporizador 200 ms
Inhibición de ciertas funciones de relé
Inhibición del corte a noff
5.1.2 Ajustes en servicio
1. Ajuste de los parámetros del eje C a través de la unidad de ajustes (taco,TN, KP, deriva).
Parámetros del eje C, v. Optimización del regulador de velocidad, cap. 2
2. Ajuste de los parámetros de cabezal por medio de los potenciómetros situa-dos en el frontal de la tarjeta opcional:
Pot. R44 0 2 3 4 5 6 7 8 10
Pot. R35=izda.Pot. R35=dcha.
215
11
1 9
Figura 5-4 Aumento del tiempo de acción integral vía potenciómetro R44 e influencia delpotenciómetro R35 de la unidad de ajustes (factor de prolongación de TN)
Conmutación deparámetros enmodo eje C
Reglas para elajuste
Módulos de avance (VS)04.975.1 Ajustes preliminares

VS
10.00
VS/5-40 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-9 Reducción de la ganancia proporcional vía el potenciómetro R45 e influencia delpotenciómetro R25 de la unidad de ajustes (reducción de Kp en %)
Pot. R45 0 1 2 3 4 5 6 7 8 9 10
izda. 33,1 29,5 26,3 23,3 20,4 17,5 14,6 11,5 8,2 4,5 0,1
Pot. R25 centro 90,9 89,4 87,8 85,9 83,7 81 77,5 72,4 64,4 48,7 1,5
dcha. 95,1 94,3 93,3 92,3 90,9 89,3 87 83,7 77,9 65 2,8
Tabla 5-10 Ajuste vía el potenciómetro R1 de la velocidad mínima antes del bloqueo delregulador y del bloqueo de impulsos (frenado hasta noff para B. 64/65 → bloqueode impulsos)
0 1 2 3 4 5 6 7 8 9 10
noff en %de nmáx
0.34 0.47 0.61 0.74 0.88 1.02 1.15 1.29 1.42 1.56 1.69
Tabla 5-11 Compensación de deriva vía potenciómetro R96 para ncons = 0
Potenciómetro R96 Margen de ajuste 30 mV
Módulos de avance (VS) 04.975.1 Ajustes preliminares

VS
10.00
VS/5-41 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.2 Salidas analógicas
Función Borne Condiciones
Valor real de velocidad B.75 Valor real de velocidad no normalizado,como hembrilla “X”
Indicación de potencia(tasa de utilización)
B.162 Indicación M/P (de fábrica) fig. 5-5, normali-zación, tabla 5-6, Normalización
Valor real de intensidad B.162 Indicación Ireal desplazando una resistencia(tabla 5-8, Ajustes en valores fijos)
nrealInd.M/P
Ireal = Imáx
t
Ind. M Ind. PM P
Mmáx Pmáx[ ]
Figura 5-5 Indicación de M/P
Módulos de avance (VS)04.975.2 Salidas analógicas

VS
10.00
VS/5-42 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avance (VS)5.2 Salidas analógicas
Espacio para sus notas

VS
10.00
VS/6-43 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Libre para extensiones
6 Libre para extensionesMódulos de avance (VS)07.94
6
VS
10.00
VS/6-44 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6 Libre para extensionesMódulos de avance (VS) 09.00
Espacio para sus notas

VS
10.00
VS/7-45 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Encendido
Interruptor principal: ABIERTO
Adaptar el módulo al motor,ajustes estándar vease VS cap. 1
Puesta en marcha con caja a pilas
Unir B.48, 64, 65, 663 con B.9
Interruptor (abierto) entre B.63 y B.9
Caja a pilas conectada en B.56/14
Interruptor principal: CERRADO Verificar el enlace motor/convertidor:
¿L1, L2, L3 permutadas cíclicamente?
Cable de potencia
Cable de captador y taco
Señal de desbloqueo pasajera en B.65
Abrir el enlace entre B.63 y B.9
sí → fallo
no
Con caja a pilas, ajustarla consigna a 0 V
Interruptor principal: ABIERTO
Fijar una consigna pequeña(p. ej. 0,1 V)
Señal de desbloqueo pasajero en B.65
sí
¿Giro continuodel motor?
no → fallo
1
¿Acelerael motor?
Módulos de avance (VS)7 Encendido
7

VS
10.00
VS/7-46 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Señal de desbloqueo en B.65
Optimización del regulador de velocidad oajuste de valores conocidos, cap. 2
Suprimir señal desbloqueo en B.65
Abrir el enlace entre B.64, 65 y B.9
Desconectar la caja a pilas en B.56/14
Puesta en marcha terminada
Suprimir señal de desbloqueo en B.63
Interruptor principal: ABIERTO
1
Módulos de avance (VS)7 Encendido
07.94

VS
10.00
VS/8-47 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Mantenimiento y diagnóstico
8.1 Hembrillas de medida y elementos de indicación de losmódulos de avance
8.1.1 Interfase confortable
R
NZ
T
X
M
W
Consigna de velocidad (salida)
Consigna de intensidad (salida)
Cons. de velocidad adic./Cons. de intensidad adic. 2)
(entrada)
Masa de referencia (salida)
Intensidad real 10 V corresponde a Imáx ajustada(salida) 1)
Velocidad real 10 V a velocidad nominal(1FT503/4–0A71: 11 V) (salida)
Todas las salidas tienen una resistencia de salida de 1 k
Figura 8-1 Bornes de medición interfaz confort
U. ajustes enchufada no sí sí sí sí sí
Desbl. impulsos 663 – no no sí sí sí
Desb. reguladores 65 – no sí no sí sí
Regulación de intens. no no no no no sí
Regulación de intensidad (funcionamiento normal)
1) Valor de ajuste Imáx, v. apt. 1.22) Según si regulación de velocidad/regulación de intensidad
Hembrillas demedida
Visualizaciónde estado
Módulos de avance (VS)03.968.1 Hembrillas de medida y elementos de indicación de los módulos de avance
8

VS
10.00
VS/8-48 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Fallo
Vigilancia I2to sobretemperaturadel disipador
X X
Capt. pos. rotor X
Regulador de n entope
X X X
Vigilancia taco X
Ireal = 0 X
Sobretemperaturaen motor
X
Tensión insuf. 5V(en nivel 5V)
X
Efecto: Limitaciónintensidad
Bloqueoimpulsos
Bloqueoimpulsos
Bloqueoimpulsos
Bloqueoimpulsos
Bloqueoimpulsos
Bloqueoimpulsos
Señaliz. NE: B.5.x – B.5.x – – – – –
Señaliz. VSA: B.291 B.297+B.672/B.674
B.5.xB.294
B.297+B.672/B.674
B.672/B.674
B.288+B.672/B.674
B.288+B.672/B.674
B.672/B.6741)
Secuencia de acontecimientos cuando responde la vigilancia de temperatura o de I2t
Vigilancia de I2t:– mín. 250 ms antes de intervenir la limitación se señaliza prealarma en B.5.x del módulo NE
(señal no memorizada).– Al intervenir la limitación se indica fallo 1 y se emite señalización por B.291 (memorizada).
Vigilancia de sobretemperatura del disipador:– Al alcanzarse en el disipador la temperatura de desconexión se produce señalización de pre-
alarma en B.5.x del módulo NE (señal no memorizada).– Tras típ. 4 s se produce el bloqueo de impulsos, indicación de fallo 1 y se emite señalización en
B.291+B.672/B.674 (memorizada).
Sobretemperatura en motor
Los módulos de avance SIMODRIVE 611 con regulación para servomotores 1FT5 están equipados conun circuito de evaluación de las señales procedentes de los termistores PTC embebidos en los devana-dos del motor.Su misión es proteger los motores de temperaturas excesivas en los devanados (temperatura de actua-ción 150 C).Para que el accionamiento no intervenga intempestivamente en el proceso de mecanizado, la actuaciónde los elementos de protección sólo se avisa como señalización (sin producir desconexión) en el SIMO-DRIVE 611 a través de señal individual en bornes 289/294/296 (memorizada) o centralizadamente através de los bornes 5.1, 5.2 y 5.3 del módulo de alimentación (memorizada).Dentro del sistema no se produce ninguna reacción destinada a proteger el motor. Por ello, el usuariodeberá programar el mando de interconexión de forma que justo tras la presencia de dicha alarma seprocure un descanso térmico para el motor. Para ello puede ser incluso necesario desconectar inmedia-tamente el motor.No se permite programar acciones retardadas.
Si no se realiza la vigilancia térmica del motor, en caso de sobrecarga o si el convertidor se ha sobredi-mensionado respecto al motor puede producirse la destrucción del accionamiento completo.
1) dependiendo del modo de operación (Listo/Fallo)
Indicación de fallo
Módulos de avance (VS) 03.968.1 Hembrillas de medida y elementos de indicación de los módulos de avance

VS
10.00
VS/8-49 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
8.1.2 Interfase estándar
Intensidad real 10 V a Imáx
Todas las salidas tienen una resistencia de salida de 10 k
LED rojo: “Fallo captador motor”Fallo taco, fallo captador pos. rotor
W T H2/M
M X H1/A
Masa de referencia general
Consigna de intensidad 10 V a Imáx
LED rojo: “Fallo eje”Regulador de n en topeTemp. del disipadorSobretemperatura motorVigilancia I2t
Velocidad real 10 V a velocidad nominal(1FT503/4–0AF71: 11 V)
Figura 8-2 Bornes de medición interfaz estándar
Secuencia de acontecimientos cuando responde la vigilancia de temperatura o de I2t
Vigilancia de I2t:– mín. 250 ms antes de intervenir la limitación se señaliza prealarma en B.5.x del módulo NE
(señal no memorizada).– Al intervenir la limitación se indica fallo H1.
Vigilancia de sobretemperatura del disipador:– Al alcanzarse en el disipador la temperatura de desconexión se produce señalización de pre-
alarma en B.5.x del módulo NE (señal no memorizada).– Tras típ. 4 s se produce el bloqueo de impulsos, indicación de fallo H1 y se emite señalización
en B.291+B.672/B.674 (memorizada).
Sobretemperatura en motor
Los módulos de avance SIMODRIVE 611 con regulación para servomotores 1FT5 están equipados conun circuito de evaluación de las señales procedentes de los termistores PTC embebidos en los devana-dos del motor.
Su misión es proteger los motores de temperaturas excesivas en los devanados (temperatura de actua-ción 150 C).Para que el accionamiento no intervenga intempestivamente en el proceso de mecanizado, la actuaciónde los elementos de protección sólo se avisa como señalización (sin producir desconexión) en el SIMO-DRIVE 611 o centralizadamente a través de los bornes 5.1, 5.2 y 5.3 del módulo de alimentación (memori-zada).
Dentro del sistema no se produce ninguna reacción destinada a proteger el motor. Por ello, el usuariodeberá programar el mando de interconexión de forma que justo tras la presencia de dicha alarma seprocure un descanso térmico para el motor. Para ello puede ser incluso necesario desconectar inmedia-tamente el motor.
No se permite programar acciones retardadas.Si no se realiza la vigilancia térmica del motor, en caso de sobrecarga o si el convertidor se ha sobredi-mensionado respecto al motor puede producirse la destrucción del accionamiento completo.
Hembrillas de medida e indica-ciones de fallo
Módulos de avance (VS)03.9604.978.1 Hembrillas de medida y elementos de indicación de los módulos de avance

VS
10.00
VS/8-50 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
8.2 Búsqueda de fallos
Tabla 8-1 Búsqueda de fallos
Fallo interfaseconfortable
Fallo interfaseestándar
Causa posible del fallo
1 H1 ¿Par efectivo demasiado grande? ¿Temperatura ambiente 40 C?
2 H2 ¿Cable valor real y pantalla conectadas correctamente? ¿Captador de-fectuoso en motor?
3 H1 ¿Motor sobrecargado?, ¿par efectivo demasiado grande?
4 H2 v. F2
5 H1 ¿Eje bloqueado mecánicamente? ¿Par efectivo demasiado grande?
6 H1 ¿Motor mal conectado? ¿Momento inercia externo demasiado grande? ¿Par efectivo demasiado grande (bloqueo mecánico)?
7 – ¿Cable motor cortado, cortocircuito/defecto a tierra en cable motor(vigilancia Uce memorizada hasta POWER-ON)? Fallo no eliminable → reemplazar el módulo
F – Fallo en nivel 5V reemplazar el módulo
Módulos de avance (VS) 03.9604.978.2 Búsqueda de fallos

VS
10.00
VS/9-51 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Anexo
9.1 Bornes de conexiónTabla 9-1 Interfase confortable
Nº deborne
Designa-ción
FunciónTipo
1) Tensión típica/límites Sección máx.
U2V2W2
Conexión del motor A 3AC 0...450 Vsegún
Instrucciones paraproyecto
PE1PE2
Conductor de protecciónConductor de protección
EE
0 V0 V
TornilloTornillo
P600M600
X151/351
Circuito intermedio (CI)Circuito intermedio (CI)Bus interno
E/AE/AE/A
+300 V–300 V
BarraBarra
Cable plano
56142)
X321X321
Consigna de vel. 1(entrada diferencial)
EE 0V... ± 10V
1,5 mm2
1,5 mm2
AS1AS2
X331X331
Contacto de reenvíoRelé bloqueo antiarranque
Ö máx. 250VAC/1A, 30 VDC/2A 1,5 mm2
663 9 65 9 22
23
X331X331X331X331X331
X331
Desbloqueo de impulsos3)
Tensión de desbloqueo3)
Desbl. de reguladores3)
Tensión de desbloqueo3)
Selección consigna interna 13)/Modo intensidad reguladaSelección consigna interna 23)
EAE AE
E
+21...30 V+24 V+13...30 V+24 V+13...30 V
+13...30 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
2024
X331X331
Cons. de velocidad 2 Consignade intensidad Entrada diferencial
EE 0V...±10 V (340 µs alisamiento)
1,5 mm2
1,5 mm2
96 44 6258 16
X331X331X331X331X331
Limitación consigna intensidadTensión electrónicaBloqueo integr. regul. nCons. intens. (maestro/esclavo)Intensidad real norm.
EAE
E/AA
0...±30 V–15 V/10 mA+13...30 V0 V...±10 V0 V...±10 V/Ri=1 kΩ
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
289288290291293294296297299
X341X341X341X341X341X341X341X341X341
Regulador de velocidad en tope
Señaliz., contacto centr.
Vigilancia I2t
Sobretemperatura motor
Vigil. taco/captador pos. rotor
ESÖSÖSÖSÖ
4)
máx. 30 V/1 Amáx. 30 V/1 Amáx. 30 V/1 Amáx. 30 V/1 Amáx. 30 V/1 Amáx. 30 V/1 Amáx. 30 V/1 Amáx. 30 V/1 A
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
672673674
X341X341X341
Señalización Listo/FalloSEÖ
30 V/1 A4)
30 V/1 A30 V/1 A
1,5 mm2
1,5 mm2
1,5 mm2
X311 Captador en motor
1) E=Entrada, A=Salida, Ö=NC, S=NA (al señalizar: cerrado=High, abierto=Low)2) Punto de referencia de la entrada diferencial3) Masa de referencia B.19 (no unida con la masa general de referencia B.15)4) Tensiones referidas al potencial PE5) v. NE– apt. 3.1 ... 3.26) Masa de referencia es el B. 15 en el módulo NE.7) El margen de modo común de la entrada diferencia vale 24V respecto al potencial PE y no deberá superarse
en ningún caso.
Módulos de avance (VS)04.979.1 Bornes de conexión
9

VS
10.00
VS/9-52 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 9-2 Opción cabezal (sólo posible con interfase confortable)
Nº deborne
Designa-ción
FunciónTipo
1) Tensión típica/límites Sección máx.
1022)
612)
753)
1623)
X312X312X312X312
TH = 1 : 10Modo eje CnrealPreal/Ireal
5)
EEAA
+13 V...30 V/RE = 1,5 kΩ+13 V...30 V/RE = 1,5 kΩ0 V...10 V0 V...10 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
110108115114216214127126
X322X322X322X322X322X322X322X322
IrealIx
nrealnx
nrealnmín
ncons= ncons*
S/Ö4)
ES/Ö4)
ES/Ö4)
ES/Ö4)
E
30 V/1,0 A max30 V/1,0 A max30 V/1,0 A max30 V/1,0 A max30 V/1,0 A max30 V/1,0 A max30 V/1,0 A max30 V/1,0 A max
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
Tabla 9-3 Interfase estándar
Nº deborne
Designa-ción
FunciónTipo1
) Tensión típica/límites Sección máx.
U2V2W2
Conexión del motor A 3AC 0...450 Vsegún
Instrucciones paraproyecto
PE1PE2
Conductor de protecciónConductor de protección
EE
0 V0 V
TornilloTornillo
P600M600
X151/351
Circuito intermedio (CI)Circuito intermedio (CI)Bus interno
E/AE/AE/A
+300 V–300 V
BarraBarra
Cable plano
AS1AS266396)
X321X321 X321X321
Contacto de reenvíoRelé bloqueo antiarranqueDesbloqueo de impulsos2)
Tensión de desbloqueo2)
Ö
EA
AC 250 V/1 A, 30 V DC/2A
+21 V...30 V+24 V
1,5 mm2
1,5 mm2
1,5 mm2
56.114.165.196)
22.196)
X331X331X331X331X331X331
Consigna de velocidad(Entrada diferencial)Desbl. de reguladores2)
Tensión de desbloqueo2)
Selección regulador I2)
Tensión de desbloqueo2)
EEEAEA
0 V...10 V
+13 V...30 V+24 V+13 V...30 V+24 V
7)1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
56.214.265.296)
22.296)
X332X332X332X332X332X332
Consigna de velocidad(Entrada diferencial)Desbl. de reguladores2)
Tensión de desbloqueo2)
Selección regulador I2)
Tensión de desbloqueo2)
EEEAEA
0 V...10 V
+13 V...30 V+24 V+13 V...30 V+24 V
7)1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1) E = Entrada, A = Salida, Ö = NC, S = NA (al señalizar: cerrado = High, abierto = Low)2) Masa de referencia B.19 (no unida con la masa general de referencia B.15)3) Masa de referencia ist B.15 am NE-Modul.4) alternativamente conmutable por puente5) de serie, indicación de potencia6) v. NE– apt. 3.1 ... 3.2
7) El margen de modo común de la entrada diferencia vale 24V respecto al potencial PE y no deberá superarseen ningún caso.
Módulos de avance (VS)9.1 Bornes de conexión
04.97

VS
10.00
VS/9-53 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.2 Esquema de bloques de la tarjeta opcional de cabezal
V39
3 2 1
R239
R906
3 2 1
R214
C20X8
X7
R274
R100
3 2 1
R213
R225
R226
R76
R78
R77
C68V52
V22
V21
V14
V10
V9
U7
U5
R125R124
6.23
R33R31
R85R80
+
+
+
R98
R97
R99
R104
R103
R107
R106
R105
R171
R170
V31 V32
V30V29
C61
C59
V20
X10C5
R902
R160
R207
R270
C41 3 2 1
3 2 1
R211
R164
R112
R111
C22
R92
R93C87
R16
R161V43V19 V18
C28X2
X1
X4
X3
C40
X12
X11
V1
V35
V8
V47
V45
R10V17 V42 V4
V6
V12
1
1
1
1
X9
K1
K2
K3
K4
5
5
5
5
R5
R2
R96
1
1
1
X5
X6
R20R43
3 2 1
3 2 1 3 2 1
R48
R108
X312
X322
R45
R44
R1
N6
N8 R903
N7
N13
N11
N12
C4
U1
C18
U3
C8
U2
C64
U6
U4
N8 C39
N1
C38
N3
C37
N14
C5
R284
R285
R900
R901
R157
R102
R101
N16
N5
X305
N5
4950
12
N17
N4
N18
N10
R27
R60
R179
R180
Figura 9-1 Esquema de bloques de la tarjeta opcional de cabezal
Los condensadores están asignados a los espadines vecinos.
Módulos de avance (VS)9.2 Esquema de bloques de la tarjeta opcional cabezal
07.94

VS
10.00
VS/9-54 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.3 Esquema de bloques de la unidad de ajuste
X72
R15
R13
1
R8
R7
R6
R36
R35
R25
R11
R12
R9
R10
X61 X70
X62 X71
X60 X69
X54 X59
R4
R5
R3
R1
R2
X51 X56
X52 X57
X53 X58
X50 X55
6
R16
R17
R18
R19
R21
R22
R23
R24
R26
R27
R28
R29
R30
R31
R32
R33
R14
R34
R37
R38
R39
R40
R41
R42
R43
R44
R45
R46
R47
R48
R49
R50
R51
R52
R53
R54
X81X91
X82
Drift
Tacho
Kp(N)
TN
Adapt
C1
C2
C3
X84
X83
C8
X88
X87
X86
X85
X30
4
12
10
S2
R20
Figura 9-2 Esquema de bloques de la unidad de ajuste
Módulos de avance (VS) 07.94
9.3 Esquema de bloques de la unidad de ajuste

VS
10.00
VS/9-55 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.4 Esquema de bloques de la interfase estándar
X34
X35
X36
X37
R55
1R
552
R54
6R
550
C23
8
C24
0
C23
6
C23
7
C23
5
C23
4
C23
9
C23
2
C23
3
C23
1R
548
R54
9R
545
R54
7
R47
3 R48
4R48
3 R48
1R
472 R
479R
478 R
476
R48
2X
331
X32
1
X31
1
X1
S1
S4
R541R539R540R538R537R536
R544R543
R554R553
R542
R55
6
R55
5
X35
1
X30
1
B1
A1
815815
19A
19B
AB
24
68
1012
1416
12
Vis
ta p
or e
l lad
o de
com
pone
ntes
(la
do 2
)
com
pone
ntes
cab
lead
os
Figura 9-3 Esquema de bloques de la interfase estándar
Módulos de avance (VS)07.94
9.4 Esquema de bloques de la interfase estándar04.97
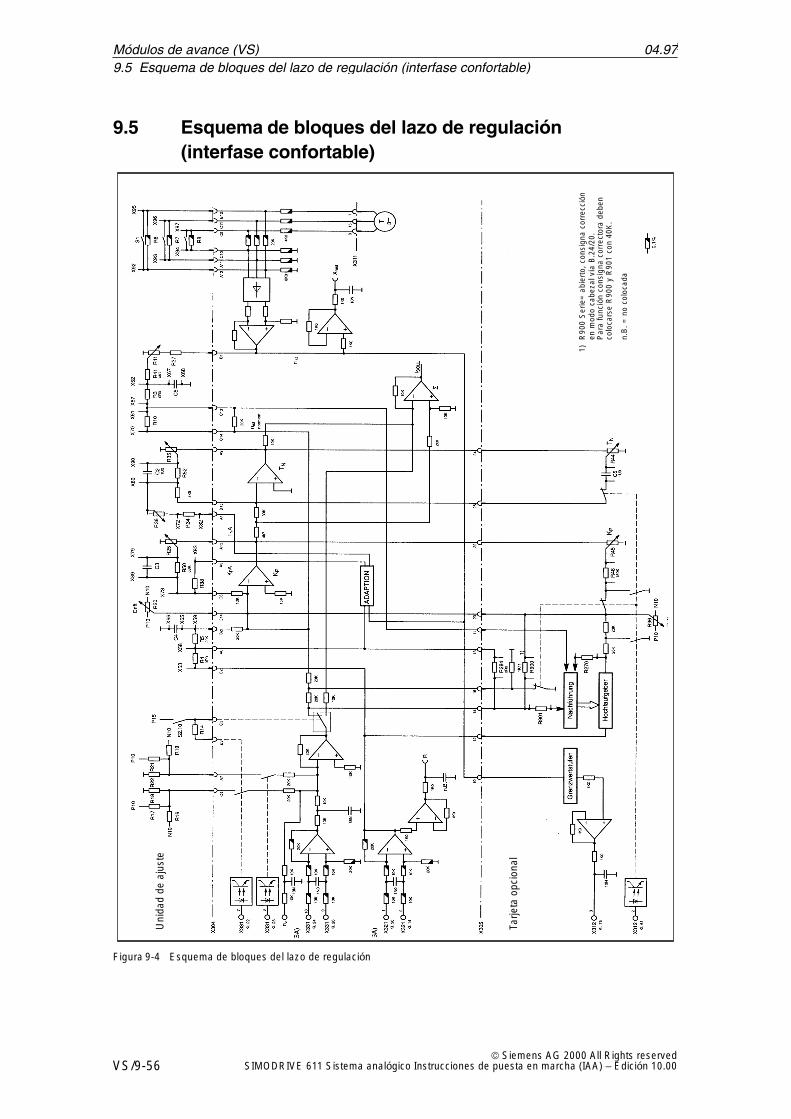
VS
10.00
VS/9-56 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.5 Esquema de bloques del lazo de regulación (interfase confortable)
1)
R90
0 S
erie
= a
bier
to,
cons
igna
cor
recc
ión
en m
odo
cabe
zal v
ía B
.24/
20.
Par
a fu
nció
n co
nsig
na c
orre
ctor
a de
ben
colo
cars
e R
900
y R
901
con
40K
.
n.B
. =
no
colo
cada
Uni
dad
de a
just
e
Tarje
ta o
pcio
nal
Figura 9-4 Esquema de bloques del lazo de regulación
Módulos de avance (VS) 07.9404.979.5 Esquema de bloques del lazo de regulación (interfase confortable)

VS
10.00
VS/9-57 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.6 Ocupación de los conectores del captador en motor X311/X313 (1er/2 eje)
Tabla 9-4 Ocupación de pines de conexión
Señal Conector captador motor Unidad de regulación
RLG S 1 13
RLG T 2 5
RLG R 3 6
P15 4 4
Masa 5 2
Taco M 6 14
Taco T 7 7
Pantalla 8 1/9
PTC 9 11
PTC 10 12
Taco R 11 8
Taco S 12 15
En el conector terminal para ejes no utilizados, del tipo Sub Min D 15 polos(hembra), conectar pin 13 con pin 2 y pin 11 con pin 12.
Ocupación de pinescable de conexiónmotor-regulación
Módulos de avance (VS)07.9404.979.6 Ocupación de los conectores del captador en motor X311 (1er eje) y X313 (2º eje)

VS
10.00
VS/9-58 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avance (VS)9.6 Ocupación de los conectores del captador en motor X311 (1er eje) y X313 (2º eje)
Espacio para sus notas

VS
10.00
VS/i-1 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Índice
AAdaptación del taco, VS/1-4, VS/2-18Ajustes del regulador de intensidad, VS/1-4Ajustes en valores fijos, VS/5-38Ajustes estándar, VS/1-3
BBúsqueda de fallos, VS/8-50
CCompensación de deriva, VS/2-23Compensación de peso, eléctrica, VS/3-30,
VS/3-32Conmutación de parámetros en modo de eje C,
VS/5-39
DDiagnóstico, VS/8-47
EElementos de ajuste
con interfase confortable, VS/3-29con interfase estándar, VS/3-25
Elementos de indicación de los módulos deavance, VS/8-47
Esquema de bloques de la interfase estándar,VS/9-55
Esquema de bloques de la unidad de ajuste,VS/9-54
Esquema de bloques del lazo de regulación,VS/9-56
Esquema de bloques del módulo opcional cabe-zal, VS/9-53
FFunción de relé, salida de los detectores del
límite, VS/5-37Funciones, en valores fijos, VS/5-38
GGanancia Kp
con adaptación, VS/2-22sin adaptación, VS/2-19
Ganancia proporcional, con adaptación, VS/2-22Ganancia proporcional Kp, VS/2-19Ganancia regulador intensidad, VS/1-5
HHembrillas de medida y elementos de indicación,
VS/8-47interfase confortable, VS/8-47interfase estándar, VS/8-49
IIndicación de fallo, VS/8-48Interfase confortable, VS/1-4Interfase estándar, VS/1-4, VS/9-55
LLazo de regulación, VS/9-56Limitación de la acción I, VS/2-23Limitación de par, VS/5-36
MMaestro/esclavo, VS/3-29Mantenimiento y diagnóstico, VS/8-47Marcha a tope fijo, VS/3-29Modo eje C, VS/5-39Módulo opcional cabezal, VS/9-53
NNormalización de intensidad real, VS/1-4Normalización de la indicación M/P, VS/5-37
OOcupación de los conectores X311 y X313,
VS/9-57
PPuesta en marcha
abreviada, VS/1-3estándar, VS/1-3etapas de puesta en marcha, VS/1-3
Puesta en marcha con opción de cabezal (HSA),VS/5-35
Módulos de avance Regulación a resolver (VS)Índice
10.00

VS
10.00
VS/i-2 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
TTemporizador, VS/3-29Tiempo de acceleración, VS/5-35Tiempo de acción integral, con adaptación,
VS/2-21Tiempo de acción integral TN, sin adaptación,
VS/2-20
UUnidad de ajuste, VS/9-54
VVisualización de estado, VS/8-47
Módulos de avance Regulación a resolver (VS)Índice

VR
VR–i Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avanceRegulación a resolver (VR)
1 Puesta en marcha abreviada, ajustes estándar VR/1-3. . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Número de polos VR/1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Normalización del valor real de velocidad [r/min] VR/1-4. . . . . . . . . . . . . . . . .
1.3 Ajustes del regulador de intensidad VR/1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Optimización del regulador de velocidad VR/2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Adaptación del taco VR/2-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Ajuste de la ganancia proporcional Kp VR/2-13. . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Ajuste del tiempo de acción integral TN VR/2-14. . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Compensación de deriva (Offset) VR/2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Puesta en marcha de funciones adicionales VR/3-15. . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Procesamiento de informaciones de posición VR/3-15. . . . . . . . . . . . . . . . . . . .
3.2 Limitación de consigna de intensidad VR/3-15. . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Otras funciones VR/3-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Servicio de móduos de avance sin motor conectado VR/3-18. . . . . . . . . . . . . .
4 Interfases de consigna VR/4-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Panorámica VR/4-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Alisamiento externo de consigna de velocidad VR/4-20. . . . . . . . . . . . . . . . . . .
5 Libre para extensiones VR/5-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Libre para extensiones VR/6-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Encendido VR/7-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Mantenimiento y diagnóstico VR/8-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Anexo VR/9-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Bornes de conexión VR/9-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Esquemas de bloques VR/9-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2.1 Esquema de bloques de la regulación a resolver VR/9-30. . . . . . . . . . . . . . . . . 9.2.2 Panorámica de bloques de interruptores DIL VR/9-32. . . . . . . . . . . . . . . . . . . .
9.3 Ocupación de los conectores VR/9-33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.3.1 X311/X312, interfase captadores eje 1/eje 2 VR/9-33. . . . . . . . . . . . . . . . . . . . . 9.3.2 X391/X392, interfase WSG eje 1/eje 2 VR/9-34. . . . . . . . . . . . . . . . . . . . . . . . . .

VR
10.00
VR–ii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
La puesta en marcha se divide en etapas. Una vez realizado los ajustesestándar puede continuarse con otra etapa de puesta en marcha o puede co-nectarse el equipo.
P. en M. abreviadaAjustes estándar
OptimizaciónReg. de velocidad
Funciones adicionales
Interfases deconsigna
Encendido Cap. 7
Mantenimiento ydiagnóstico
Anexo
Cap. 1
Cap. 2
Cap. 3
Cap. 4
Cap. 8
Cap. 9
Etapas de puestaen marcha de losmódulos VSARegulación aresolver
12.94

VR
10.00
VR/1-3 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Puesta en marcha abreviada,ajustes estándar
Los elementos de ajuste (interruptor) están en la unidad de módulos y deberánajustarse antes de montar la unidad de regulación y el módulo de potencia.
1.1 Número de polos
Importante
Los números (de pares) de polos del motor y del resolver deberán ajustarseobligatoriamente antes de la puesta en marcha. De lo contrario permanecebloqueado el accionamiento.
Eje 1: Bloque de interruptores S1, interruptores 1–4Eje 2: Bloque de interruptores S2, interruptores 1–4
Tabla 1-1 Número de polos
Motor 2p 2 4 6 8 Resolver 2p 2 4 6 8
Eje 1 S1.x ON – 1 2 1+2 S1.x ON – 3 4 3+4
Eje 2 S2.x ON – 1 2 1+2 S2.x ON – 3 4 3+4
Los números (de pares) de polos de los motores dependen de la altura de eje.
Tabla 1-2 Número (de pares) de polos de motores 1FT6
Altura de eje AH 36 48 63 80 100 132
MLFB 1FT60311FT6034
1FT60411FT6044
1FT60611FT60621FT6064
1FT60811FT60821FT60841FT6086
1FT61021FT61051FT6108
1FT61321FT61341FT6136
Nº de polos 2p 4 4 6 8 8 6
Tabla 1-3 Número (de pares) de polos de motores 1FK6
Altura de eje AH 36 48 63 80 100
MLFB 1FK6032 1FK60401FK6042
1FK60601FK6063
1FK60801FK6083
1FK61001FK61011FK6103
Nº de polos 2p 6 6 6 6 8
El número (de pares) de polos del resolver estándar es 2p=2.El número (de pares) de polos del resolver se especifica en la placa decaracterísticas del motor.
Módulos de avance Regulación a resolver (VR)1.1 Número de polos
1

VR
10.00
VR/1-4 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.2 Normalización del valor real de velocidad [r/min]
Esta normalización es válida para el resolver con número de polos estándar(2p=2).
Se recomienda realizar la normalización correspondiente a la velocidad nomi-nal del motor. Para los motores con velocidad nominal 4500 r/min, se reco-mienda ajustar la normalización correspondiente a la velocidad más próxima ala velocidad nominal del órgano accionado.
Para motores con velocidad nominal 1500 r/min, la normalización se ajustarápara 2000 r/min.
Eje 1: Bloque de interruptores S4, interruptores 1–4Eje 2: Bloque de interruptores S4, interruptores 5–8
Tabla 1-4 Normalización del valor real de velocidad
nnom 2000 3000 3000 6000
Eje 1 S4.x ON – 1+3 2+4 1+2+3+4
Eje 2 S4.x ON – 5+7 6+8 5+6+7+8
posible a elección
Datos más precisos sobre los márgenes de velocidad ajustables, v. apt. 2.1.
Módulos de avance Regulación a resolver (VR)1.2 Normalización del valor real de velocidad

VR
10.00
VR/1-5 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.3 Ajustes del regulador de intensidad
Eje 1: Bloque de interruptores S3Eje 2: Bloque de interruptores S6
Límite intensidad =Imáx (valor ajustado)
Ilím (parte de potencia)[%]
Imáx debe redurcirse como mínimo a la intensidad de punta permitida para elmotor.
Tabla 1-5 Normalización del valor real de intensidad [%]
Imáx/Ilím [%] 100 70
Eje 1 S3.x ON – 1+2
Eje 2 S6.x ON – 1+2
Kp (I) =Ilím * lím. intensidad * LAImáx *
25
LA
25<
Imáx = intensidad má. ajustada (valor eficaz) del eje en ALA = inductancia del motor en mH (valor eficaz) (v. Instrucciones de proyectomotores de corriente alterna para accionamientos de avance y cabezal).¡Redondear a valores posibles los valores calculados!
Tabla 1-6 Ganancia del regulador de intensidad Kp (I)
Kp(I) 1 2 3 4 5 6 7,5 8,5 9,5 10,5 11,5 12,5 13,5 14,5 16
Eje 1 S3.x ON – 3+7 4+8 3+4+
7+8
5+9 3+5+
7+9
4+5+
8+9
3+4+5+7+8+9
3+6+
7+10
4+6+
8+10
3+4+6+7+8+10
5+6+
9+10
3+5+6+7+9+10
4+5+6+8+9+10
3+4+5+6+7+8+9+10
Eje 2 S6.x ON – 3+7 4+8 3+4+
7+8
5+9 3+5+
7+9
4+5+
8+9
3+4+5+7+8+9
3+6+
7+10
4+6+
8+10
3+4+6+7+8+10
5+6+
9+10
3+5+6+7+9+10
4+5+6+8+9+10
3+4+5+6+7+8+9+10
Definición: o = Interruptor abierto (OFF)x = Interruptor cerrado (ON)
Bloque interrupto-res DIL
Normalización delvalor real de inten-sidad
Ganancia del regu-lador de intensi-dad Kp (I)
Tablas deadaptación
Módulos de avance Regulación a resolver (VR)1.3 Ajustes del regulador de intensidad

VR
10.00
VR/1-6 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-7 Tabla de adaptación para módulo de potencia 6SN112–1A00–0HA1 Regulación a resolver 3/6 A
ServomotorNormaliz. val. real intens.Eje 1: S3Eje 2: S6
Ganancia regul.intensidad Kp(I)Eje 1: S3Eje 2: S6
1FTMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FTMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6031–4AK 0,83 1,2 6000 x 70 o o x o 5,0
6034–4AK 1,65 2,15 6000 o 100 x x o o 4,0
6041–4AF 2,15 1,55 3000 o 100 o x o x 10,5
6041–4AK 2,15 2,55 6000 o 100 x x o o 4,0
6044–4AF 4,15 2,50 3000 o 100 o x x o 7,5
6061–6AC 3,30 1,60 2000 o 100 x x x x 16,0
6061–6AF 3,30 2,25 3000 o 100 x x x o 8,5
6062–6AC 5,00 2,30 2000 o 100 x x o x 11,5
1FKMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FKMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6032–6AK 0,90 1,40 6000 o 100 x x o o 4,0
6040–6AF 1,30 1,10 3000 x 70 x o x o 6,0
6040–6AK 1,3 2,2 6000 0 100 x 0 0 0 2,0
6042–6AF 2,65 2,20 3000 o 100 x x o o 4,0
Definición: o = Interruptor abierto (OFF)x = Interruptor cerrado (ON)
Módulos de avance Regulación a resolver (VR)1.3 Ajustes del regulador de intensidad

VR
10.00
VR/1-7 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-8 Tabla de adaptación para módulo de potencia 6SN112–1A00–0AA1 Regulación a resolver 5/10 A
ServomotorNormaliz. val. real intens.Eje 1: S3Eje 2: S6
Ganancia regul.intensidad Kp(I)Eje 1: S3Eje 2: S6
1FTMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FTMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6034–4AK 1,65 2,15 6000 x 70 o o x o 5,0
6041–4AF 2,15 1,55 3000 x 70 o x x x 14,5
6041–4AK 2,15 2,55 6000 o 100 o x x o 7,5
6044–4AF 4,15 2,50 3000 o 100 x o x x 13,5
6044–4AK 4,15 4,85 6000 o 100 x x o o 4,0
6061–6AF 3,30 2,25 3000 o 100 x x x x 16,0
6061–6AH 3,30 3,35 4500 o 100 o x x o 7,5
6061–6AK 3,30 4,10 6000 o 100 x x o o 4,0
6062–6AC 5,00 2,30 2000 x 70 x x x x 16,0
6062–6AF 5,00 3,40 3000 o 100 o x o x 10,5
6062–6AH 5,00 4,80 4500 o 100 o o x o 5,0
6062–6AK 5,00 6,40 6000 o 100 o x o o 3,0
6064–6AC 7,90 3,50 2000 o 100 o x x x 14,5
6064–6AF 7,90 5,00 3000 o 100 o x x o 7,5
6081–8AC 6,60 3,40 2000 o 100 x o x x 13,5
1FKMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FKMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6040–6AK 1,30 2,20 6000 x 70 o x o o 3,0
6042–6AF 2,65 2,20 3000 o 100 o x x o 7,5
6060–6AF 5,00 3,60 3000 o 100 o x x o 7,5
6080–6AF 6,60 4,50 3000 o 100 o x x o 7,5
Definición: o = Interruptor abierto (OFF)x = Interruptor cerrado (ON)
Módulos de avance Regulación a resolver (VR)1.3 Ajustes del regulador de intensidad

VR
10.00
VR/1-8 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-9 Tabla de adaptación para módulo de potencia 6SN112–1A00–0BA1Regulación a resolver 9/18 A
ServomotorNormaliz. val. real intens.Eje 1: S3Eje 2: S6
Ganancia regul.intensidad Kp(I)Eje 1: S3Eje 2: S6
1FTMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FTMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6044–4AK 4,15 4,85 6000 o 100 x o x o 6,0
6061–6AF 3,30 2,25 3000 x 70 x x x x 16,0
6061–6AH 3,30 3,25 4500 o 100 x x o x 11,5
6061–6AK 3,30 4,10 6000 o 100 o x x o 7,5
6062–6AF 5,00 3,40 3000 o 100 x x x x 16,0
6062–6AH 5,00 4,80 4500 o 100 x x x o 8,5
6062–6AK 5,00 6,40 6000 o 100 o o x o 5,0
6064–6AC 7,90 3,50 2000 x 70 x x x x 16,0
6064–6AF 7,90 5,00 3000 o 100 o o x x 12,5
6064–6AH 7,90 7,60 4500 o 100 o o x o 5,0
6064–6AK 7,90 9,90 6000 o 100 o x o o 3,0
6081–8AC 6,60 3,40 2000 x 70 x x x x 16,0
6081–8AF 6,60 4,90 3000 o 100 o x o x 10,5
6081–8AH 6,60 7,40 4500 o 100 o o x o 5,0
6081–8AK 6,60 9,40 6000 o 100 o x o o 3,0
6082–8AC 10,40 5,50 2000 o 100 o x x x 14,5
6082–8AF 10,40 8,20 3000 o 100 x o x o 6,0
6084–8AC 16,20 7,55 2000 o 100 o x o x 10,5
6084–8AK 16,20 20,50 6000 o 100 o o o o 1,0
6102–8AB 22,40 7,40 1500 o 100 o o x x 12,5
1FKMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FKMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6060–6AF 5,00 3,60 3000 x 70 x o o x 9,5
6063–6AF 9,10 6,60 3000 o 100 x o x o 6,0
6080–6AF 6,60 4,50 3000 o 100 o o x x 12,5
6083–6AF 13,30 8,50 3000 o 100 o x x o 7,5
6100–8AF 15,00 10,20 3000 o 100 o x o o 3,0
Definición: o = Interruptor abierto (OFF)x = Interruptor cerrado (ON)
Módulos de avance Regulación a resolver (VR)1.3 Ajustes del regulador de intensidad

VR
10.00
VR/1-9 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-10 Tabla de adaptación para módulo de potencia 6SN112–1A00–0CA1 Regulación a resolver 18/36 A
ServomotorNormaliz. val. real intens.Eje 1: S3Eje 2: S6
Ganancia regul.intensidad Kp(I)Eje 1: S3Eje 2: S6
1FTMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FTMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6062–6AH 5,00 4,80 4500 x 70 x x o x 11,5
6062–6AK 5,00 6,40 6000 o 100 x o o x 9,5
6064–6AF 7,90 5,00 3000 x 70 x x x x 16,0
6064–6AH 7,90 7,60 4500 o 100 o x o x 10,5
6064–6AK 7,90 9,90 6000 o 100 x o x o 6,0
6081–8AH 6,60 7,40 4500 o 100 o x o x 10,5
6081–8AK 6,60 9,40 6000 o 100 x o x o 6,0
6082–8AF 10,40 8,20 3000 o 100 x o x x 13,5
6082–8AH 10,40 12,20 4500 o 100 x o x o 6,0
6082–8AK 10,40 14,65 6000 o 100 x x o o 4,0
6084–8AC 16,20 7,55 2000 x 70 o x x x 14,5
6084–8AF 16,20 11,30 3000 o 100 x o o x 9,5
6084–8AH 16,20 16,70 4500 o 100 x x o o 4,0
6084–8AK 16,20 20,50 6000 o 100 o x o o 3,0
6086–8AC 22,40 10,00 2000 o 100 x x x x 16,0
6086–8AF 22,40 14,40 3000 o 100 x x x o 8,5
6086–8AH 22,40 20,40 4500 o 100 x x o o 4,0
6102–8AB 22,40 7,40 1500 x 70 x x x x 16,0
6102–8AC 22,40 10,20 2000 o 100 x o x x 13,5
6102–8AF 22,40 14,20 3000 o 100 o x x o 7,5
6102–8AH 22,40 20,60 4500 o 100 o x o o 3,0
6105–8AB 41,50 13,80 1500 o 100 o x x x 14,5
6105–8AC 41,50 18,40 2000 o 100 x x x o 8,5
6084–8SF 22,00 16,30 3000 o 100 x x x o 8,5
1FKMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FKMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6063–6AF 9,10 6,60 3000 x 70 o x x o 7,5
6083–6AF 13,30 8,50 3000 o 100 x o x x 13,5
6100–8AF 15,00 10,20 3000 o 100 x o x o 6,0
6101–8AF 22,40 14,40 3000 o 100 o o x o 5,0
6103–8AF 30,00 19,00 3000 o 100 o x o o 3,0
Definición: o = Interruptor abierto (OFF)x = Interruptor cerrado (ON)
Módulos de avance Regulación a resolver (VR)1.3 Ajustes del regulador de intensidad

VR
10.00
VR/1-10 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-11 Tabla de adaptación para módulo de potencia 6SN112–1AA00–0DA1 Regulación a resolver 28/56 A
ServomotorNormaliz. val. real intens.Eje 1: S3Eje 2: S6
Ganancia regul.intensidad Kp(I)Eje 1: S3Eje 2: S6
1FTMo [Nm] Io [Α] nnom Interrupt. Imáx Interruptores
Kp(I)1FTMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interru t.
1+2Imáx
[%] 3+7 4+8 5+9 6+10Kp(I)
6062–6AK 5,00 6,40 6000 x 70 x x o x 11,5
6064–6AH 7,90 7,60 4500 X 70 x x o x 11,5
6064–6AK 7,90 9,90 6000 o 100 x o o x 9,5
6081–8AK 6,60 9,40 6000 x 70 x o x o 6,0
6082–8AF 10,40 8,20 3000 x 70 o x x x 14,5
6082–8AH 10,40 12,20 4500 o 100 x x o x 11,5
6082–8AK 10,40 14,65 6000 o 100 x o x o 6,0
6084–8AF 16,20 11,30 3000 o 100 x x x x 16,0
6084–8AH 16,20 16,70 4500 o 100 x o x o 6,0
6084–8AK 16,20 20,50 6000 o 100 o o x o 5,0
6086–8AC 22,40 10,00 2000 x 70 x x x x 16,0
6086–8AF 22,40 14,40 3000 o 100 x o o x 9,5
6086–8AH 22,40 20,40 4500 o 100 x o x o 6,0
6102–8AC 22,40 10,20 2000 x 70 x x x x 16,0
6102–8AF 22,40 14,20 3000 o 100 x x o x 11,5
6102–8AH 22,40 20,60 4500 o 100 o o x o 5,0
6105–8AB 41,50 13,80 1500 x 70 x x x x 16,0
6105–8AC 41,50 18,40 2000 o 100 x o x x 13,5
6105–8AF 41,50 27,70 3000 o 100 x o x o 6,0
6108–8AB 58,00 18,50 1500 o 100 x x x x 16,0
6108–8AC 58,00 24,00 2000 o 100 x o o x 9,5
6132–6AB 62,00 18,50 1500 x 70 x x x x 16,0
6132–6AC 62,00 25,00 2000 o 100 o o x x 12,5
6132–6AF 62,00 37,00 3000 o 100 x o x o 6,0
6134–6AB 79,00 24,00 1500 o 100 x x x x 16,0
6134–6AC 79,00 31,50 2000 o 100 o x x x 14,5
6136–6AB 95,00 28,00 1500 o 100 o x x x 14,5
6084–8SF 22,00 16,30 3000 o 100 o x x x 14,5
6084–8SH 22,00 22,90 4500 o 100 x o x o 6,0
6084–8SK 22,00 31,00 6000 o 100 x x o o 4,0
6086–8SF 29,50 22,30 3000 o 100 x o o x 9,5
6105–8SC 50,00 25,00 2000 o 100 x x o x 11,5
1FKMo [Nm]
60KIo [Α]60K
nnom
[r/min]Interrupt.
1+2Imáx
[%] 3+7 4+8 5+9 6+10 Kp(I)
6083–6AF 13,30 8,50 3000 x 70 o x x x 14,5
6100–8AF 15,00 10,20 3000 x 70 o x x o 7,5
6101–8AF 22,40 14,40 3000 o 100 o x x o 7,5
6103–8AF 30,00 19,00 3000 o 100 o o x o 5,0
Definición: o = Interruptor abierto (OFF)x = Interruptor cerrado (ON)
Módulos de avance Regulación a resolver (VR)1.3 Ajustes del regulador de intensidad

VR
10.00
VR/2-11 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Optimización del regulador de velocidad
Los alisamientos suplementarios en el lazo de regulación de velocidad (amorti-guación de resonancias mecánicas) se describen en el cap. 3. Marcha a seguirpara optimizar el regulador de velocidad:
1. Adaptación del taco
2. Ganancia Kp
3. Tiempo de acción integral TN
4. Compensación de deriva (Offset)
Para realizar la optimización del regulador de velocidad, el equipo deberá estarbajo tensión. V. cap. 7 “Encendido”.
Las indicaciones de divisiones para los potenciómetros (en las tablas de ajuste)se definen como sigue:
8 9/10
76
5
43
2 0/1
5
123
4
987
6
0
10
Este gráfico representa el ajuste en7 divisiones.
Módulos de avance Regulación a resolver (VR)2 Optimización del regulador de velocidad
2
07.94

VR
10.00
VR/2-12 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.1 Adaptación del taco
La velocidad real del accionamiento puede modificarse, en caso de consignade velocidad 10 V, en el margen que se indica a continuación alrededor de lavelocidad nominal ajustada conforme al apt. 1.2:
Potenciómetro Margen de ajuste
T 0,6 nnom nreal N 1,8 nnom
Con las velocidades nominales ajustables conforme al apt. 1.2 resultan paraconsigna de velocidad 10 V los márgenes de ajuste siguientes:
10800 r/min
30001500 600045002000nmotor N 1) [r/min]
3000 60002000nmotor N 2) [r/min]
1) Velocidad nominal del motor2) Velocidades nominales ajustables con regulación a resolver
3510 r/min
nnom
a
5400 r/min1760 r/min
3600 1/min1170 r/min
2)
2)
2)
a
a
nnom
nnom
Figura 2-1 Gamas de ajuste con consigna de velocidad de giro 10 V
Si se reduce la consigna de velocidad disminuye correspondientemente el mar-gen de ajuste. Recomendamos utilizar una consigna de velocidad 8 V paramotores con velocidad nominal de 6000 r/min a fin de limitar la velocidadmáxima ajustable.
Precaución
¡Sólo son posibles los márgenes de ajuste indicados!El margen de ajuste y la consigna máxima de velocidad deberán definirse deforma que no se sobrepase en ningún caso la velocidad máxima permitida enel motor conectado. Las velocidades máximas permitidas de los motores figu-ran en las Instrucciones para proyecto de los motores.
Módulos de avance Regulación a resolver (VR)2.1 Adaptación del taco
03.96

VR
10.00
VR/2-13 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.2 Ajuste de la ganancia proporcional Kp
La ganancia proporcional Kp del regulador de velocidad se ajusta con el poten-ciómetro Kp. La ganancia ajustada con el potenciómetro Kp no queda práctica-mente afectada por la posición del potenciómetro TN.
Kp170160
140
120
100
80
60
40
20
00 1 2 3 4 5 6 7 8 9 10
Posición potenciómetro Kp
Figura 2-2 Proportionalverstärkung Kp in Abhängigkeit vom Kp-Poti
Si está activada la compensación eléctrica de peso (v. cap. 3.3), esto incre-menta la ganancia proporcional en el factor siguiente:
Kp= 1+
Imáx
Kp (con compensación peso) Icompensación peso
Módulos de avance Regulación a resolver (VR)2.2 Ajuste de la ganancia proporcional Kp
04.97

VR
10.00
VR/2-14 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3 Ajuste del tiempo de acción integral TN
El tiempo de acción integral del regulador de velocidad se ajusta con el poten-ciómetro TN.
TN in ms4540
30
20
10
00 1 2 3 4 5 6 7 8 9 10
Posición potenciómetro TN
Figura 2-3 Tiempo acción integral TN en función del potenciómetro TN
2.4 Compensación de deriva (Offset)
Ajuste por potenciómetro Drift para ncons = 0
Potenciómetro Drift Margen de ajuste 45 mV
Módulos de avance Regulación a resolver (VR)2.4 Compensación de deriva (Offset)
12.94

VR
10.00
VR/3-15 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Puesta en marcha de funciones adicionales
3.1 Procesamiento de informaciones de posición
La interfase WSG no es afectada por los bloqueos de regulador (B. 63, B. 64,B. 65, B. 663) ni por el Reset (B. R) central. En caso de fallo en captador y conReset de encendido, las salidas se conmutan a alta impedancia.
Interruptorpara eje 1
Interruptorpara eje 2
Efecto
Nº pares polos motor 1)
Nº pares polos resolver1) 4)S1.xS1.x
S2.xS2.x
2p=2, 4, 6, 8 corresp. a p=1, 2, 3, 42p=2, 4, 6, 8 corresp. a p=1, 2, 3, 4
Orden de las pistasA, B (WSG)
S1.6=OFFS1.6=ON
S2.6=OFFS2.6=ON
A delante de B en giro horario 2)
B delante de A en giro horario 2)
Número de rayas interfaseWSG
S1.7=OFFS1.7=ON
S2.7=OFFS2.7=ON
512 impulsos/vuelta1024 impulsos/vuelta
Ajuste fino del decalaje deorigen 3)
S1.8+S11.x=OFFS1.8=ONS11.1=ONS11.2=ONS11.3=ONS11.4=ONS11.5=ON
S2.8+S11.x=OFFS2.8=ONS11.6=ONS11.7=ONS11.8=ONS11.9=ONS11.10=ON
Decalaje en 0 mecánicosDecalaje en 5,625 mecánicosDecalaje en 11,25 mecánicosDecalaje en 22,5 mecánicosDecalaje en 45 mecánicosDecalaje en 90 mecánicosDecalaje en 180 mecánicos
3.2 Limitación de consigna de intensidad
Función Interruptorpara eje 1
Interruptorpara eje 2
Efecto
Limitación de consigna de in-tensidad para selección porB.96 o en caso de modoPREPARACION¡Atención!Para ambas funcionesactúa la misma limitación.
S12.x=OFFS12.4=ONS12.3=ONS12.3+4=ONS12.2=ONS12.2+3=ONS12.1=ON
S12.x=OFFS12.8=ONS12.7=ONS12.7+8=ONS12.6=ONS12.6+7=ONS12.5=ON
Limitación a 100%Limitación a 75%Limitación a 55%Limitación a 45%Limitación a 25%Limitación a 20%Limitación a 5%
1) Los números de pares de polos deberán ajustarse antes de la puesta en marcha (v. cap. 1)2) Mirando hacia el extremo de eje del lado de accionamiento (LA).3) El decalaje de origen resultante es la suma de todos los desplazamientos ajustados.4) El número de señales de origen por giro mecánico es igual al número de pares de polos p del resolver.
Módulos de avance Regulación a resolver (VR)07.94
3
3.2 Limitación de consigna de intensidad

VR
10.00
VR/3-16 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3 Otras funciones
Función Interruptorpara eje 1
Interruptorpara eje 2
Efecto
Bloqueo integrador regulador nBloqueo integrador regulador I 1)
Señalización de FalloMaestro/esclavoTemporizador 2)
S5.1=OFF/ONS5.2=OFF/ONS5.5=OFF/ON
S5.7=OFF/ON
S5.3=OFF/ONS5.4=OFF/ONS5.5=OFF/ONS5.6=OFF/ONS5.8=OFF/ON
desbloqueado/bloqueadodesbloqueado/bloqueadoConmutación señalización Fallo/Listo2º eje como esclavo 3)
1 s / 300 ms
Función 4) Componentespara eje 1
Componentespara eje 2
Estado de fábrica
Alisamientos:Consigna velocidadVelocidad realRegulador velocidad
Limitación TN regulador nCompens. de peso pos. IconsCompens. de peso neg. Icons
C1355)
C1435)
C1345)
R4486)
R3496)
R3486)
C1485)
C1495)
C1475)
R4546)
R3566)
R3556)
33 nF corresponde a 220 s–––1 nF corresponde a 160 s–––––––––
Consigna de velocidad tcons = C135(C148) 6,67 kVelocidad real treal = C143(C149) 6,67 kVelocidad real tnReg = C134(C147) 160 k
Los siguientes componentes se encuentran en el lado de componentes(“Lado 2”): C135, C143, C134, R348, R349, R454
Los siguientes componentes se encuentran en el lado de soldadura (“Lado 1”):C148, C149, C147, R355, R356, R448
V. apt. 4.2.
Cálculo de las con-stantes de tiempode alisamiento
Dimensionamientodel alisamiento ex-terno de velocidad
Módulos de avance Regulación a resolver (VR)3.3 Otras funciones

VR
10.00
VR/3-17 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1,00,8
0,40,30,2
0,10,080.060,040,030,02
0,015 10 20 33
4756
68100 150 220 390
470680
Icompensación peso/Imáx
RX [k]
Zona prohibida
0,5
Figura 3-1 Consigna adicional de intensidad para compensación eléctrica de peso
En el eje esclavo debe estar siempre seleccionado, vía B.22, funcionamientocon regulación de intensidad. Con unidad de regulación de 2 ejes, el maestro yel esclavo sólo pueden funcionar si giran en sentido opuesto.
Si se utiliza una unidad de regulación de 1 eje como maestro, el maestro y elesclavo pueden hacerse girar en el mismo o en sentido opuesto. Dicha selec-ción se efectúa cableando adecuadamente la salida de consigna de intensidad(B.258, B.15) con la entrada diferencia de consigna de intensidad (B.24, B.20).
1) Esta función sólo actúa en modo con regulación de intensidad; en modo con regulación de velocidad está siempre des-bloqueado el integrador del regulador de intensidad.
2) Para B.65 y vigilancia “Regulador de velocidad en tope”.3) Atención: ¡el maestro y el esclavo giran en sentido opuesto!4) Adaptación sólo para condiciones de funcionamiento difíciles.
Adaptación eventualmente soldando componentes SMD.5) Componente SMD, tamaño 08056) Componente SMD, tamaño 0204/Mini-Melf; alternativamente tamaño 0805
Parametrización dela compensacióneléctrica de peso
Modomaestro/esclavo
Módulos de avance Regulación a resolver (VR)3.3 Otras funciones
07.94

VR
10.00
VR/3-18 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.4 Servicio de módulos de avance sin motor conectado
Las medidas descritas a continuación permiten funcionar módulos de dos ejesen calidad de módulo de un eje.Para que el conjunto de accionamientos funcione correctamente, en el eje noactivo deberán anularse las vigilancias “Temperatura de motor” y “Fallo capta-dor”.Por ello, usando puentes de cortocircuito, es necesario interconectar en el co-nector del captador (X311/X312) las señales siguientes en el eje no conectado.
Acción Señal Pin puentear con Pin Señal
1 TEMP_PLUS 13 25 TEMP_MINUS
2 SIN_PLUS 3 9 RES_POS
3 SIN_MINUS 4 11 RES_NEG
Precaución
Si no se ha realizado la acción 1, entonces se activa la señalización conjunta“Temperatura motor/I2t” del módulo E/R o URE, señalizando fallo (sobretempe-ratura).Si no se realiza la acción 2 y 3, el relé “Listo” del módulo E/R o UE señaliza“Fallo”/ “no listo”.
Módulos de avance Regulación a resolver (VR) 07.943.4 Servicio de módulos de avance sin motor conectado

VR
10.00
VR/4-19 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Interfases de consigna
4.1 Panorámica
Definiciones:
X Optimo considerando las propiedades de la entrada de consigna
Posible
Prohibido y en parte imposible
Tabla 4-1 Consigna principal – consignas adicionales
Modo Consigna B.56/14 B.24/20 B.258/151)
Regulación de velocidad Cons. principal X
Cons. adicional X
Regulación de intensidad Cons. principal X
Cons. adicional
Esclavo con regulación IEntrada consigna de intensi-
Cons. principal XEntrada consigna de intensi-dad Cons. adicional
Maestro con regulación nSalida consigna de intensi-
Cons. principal XSalida consigna de intensi-dad Cons. adicional
1) sólo en ejecución con 1 eje,en ejecución con 2 ejes el enlace ya viene realizado internamente
Módulos de avance Regulación a resolver (VR)4.1 Panorámica
04.97
4

VR
10.00
VR/4-20 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.2 Alisamiento externo de consigna de velocidad
Para el filtro de alisamiento de consigna de velocidad, internamente en la tar-jeta están previstos las posiciones C135 y C148 (v. apt. 3.3). Estos lugaresestán previstos para condensadores SMD. De esta forma es posible lograr con-stantes de tiempo de aprox. 1 ms. Para constantes mayores es necesario utili-zar componentes situados fuera del módulo, y que se conectarán a la entradade consigna de velocidad.Se recomienda el circuito exterior siguiente:
20k
20k
20k
20k
Rext=2kΩ
Cext
Rext=2kΩ
Kl 56
Kl 14
Alisamiento de con-signa de velocidadexterna
Entrada de con-signa de veloci-dad interna
+
–
Figura 4-1 Alisamiento de consigna de velocidad externa
Para la constante de tiempo de alisamiento de la consigna de veloci-dad rige:
tcons,total = tcons + tcons,ext
tcons = alisamiento de consigna interno (v. apt. 3.3)
tcons,ext = Cext * 2 * Rext = Cext * 4kΩ
Módulos de avance Regulación a resolver (VR)4.2 Alisamiento externo de consigna de velocidad
04.97

VR
10.00
VR/5-21 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Libre para extensiones
Módulos de avance Regulación a resolver (VR)5 Libre para extensiones
03.96
5

10.00
VR/5-22 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avance Regulación a resolver (VR)5 Libre para extensiones
Espacio para sus notas
10.00

VR
10.00
VR/6-23 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Libre para extensiones
Módulos de avance Regulación a resolver (VR)6 Libre para extensiones
03.96
6

10.00
VR/6-24 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avance Regulación a resolver (VR)6 Libre para extensiones
03.96
Espacio para sus notas
10.00

VR
10.00
VR/7-25 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Encendido
Verificar el enlace motor/convertidor:
¿L1, L2, L3 permutadas cíclicamente?
Cable de potencia
Cable de captador
Ajustar los pares de polos del motor y el re-solver
no
sí
1
Interruptor principal: ABIERTO
Adaptar el módulo al motor,ajustes estándar cap. 1
Puesta en marcha con caja a pilas
Unir B.48, 63, 64, 663 con B.9
Interruptor (abierto) entre B.65 y B.9
Caja a pilas conectada en B.56/14
Interruptor principal: CERRADO
Con caja a pilas, ajustarla consigna a 0 V
Señal de desbloqueo pasajera en B.65
¿Acelerael motor?
Fijar una consigna pequeña(p. ej. 0,1 V)
Señal de desbloqueo pasajero en B.65
¿Giro continuodel motor?
no → fallo
Interruptor principal: ABIERTO
Abrir el enlace entre B.63 y B.9
sí → fallo
Módulos de avance Regulación a resolver (VR)7 Encendido
03.96
7

VR
10.00
VR/7-26 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1
Señal de desbloqueo en B.65
Optimización del regulador de velocidad oajuste de valores conocidos, cap. 2
Suprimir señal desbloqueo en B.65
Abrir el enlace entre B.64, 65 y B.9
Desconectar la caja a pilas en B.56/14
Puesta en marcha terminada
Suprimir señal de desbloqueo en B.63
Interruptor principal: ABIERTO
En caso de necesidad, realizar la puesta enmarcha de funciones adicionales: cap. 3
Módulos de avance Regulación a resolver (VR)7 Encendido
03.96

VR
10.00
VR/8-27 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Mantenimiento y diagnóstico
Para mediciones se ofrece el B.16 = Ireal y el B.75 =nreal.
Normalización: B.16 10 V corresponde a ImáxB.75 10 V corresponde a nnom (v. apt. 2.1)
Para el diagnóstico se incluye un LED en el frontal.Dependiendo del modo seleccionado se señaliza bien Listo o Fallo.
Tabla 8-1 LED de señalización
LED apagado LED encendido
Efecto en el modo “Listo” Ambos ejes de un módulo de 2 ejesestán desbloqueados.
Como mínimo un eje bloqueado víaborne o por una señalización de fallo.
Efecto en el modo “Fallo” Ninguno de los 2 ejes de un módulode 2 ejes está bloqueado por señali-zación de fallo.
Como mínimo un eje bloqueado porseñalización de fallo.
Tabla 8-2 Causas de las señalizaciones de fallo
Fallo Efecto
Regulador de n en tope memorizado 1)
Fallo en captador memorizado 1)
Sobretemperatura en disipador Alarma a módulo NE, se memoriza tras 4 s 1)
Sobretemperatura en motor Alarma a módulo NE, no se memoriza
1) memorizado = bloqueo de impulsos
Hembrillas demedida
Indicadores LED
Módulos de avance Regulación a resolver (VR)8 Mantenimiento y diagnóstico
04.97
8

VR
10.00
VR/8-28 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Para funciones de diagnóstico, el conector de la interfase WSG ofrece lasseñales que se describen a continuación.2)
Nivel de señal: HCMOS / 5V
Tabla 8-3 Señales para análisis de errores y fallos
Señal Nombre Pin Estado L=Low Estado H=High
READY Reset hardware 1 Tensión de alimentación o.k. Tensión de alimentación no o.k.:–Arranque tras encendido–P5 defectuoso
ER_IL Vigilancia I2t 9 sin fallo Fallo: sobretemperatura en disipador
ER_TNR Regulador n en tope 10 sin fallo Fallo: desde 1s/300ms el regulador develocidad está ya en limitación
EN_WSG Desbloqueoseñales WSG
11 Interfase WSG bloqueadaSeñales A, B, R alta impedan-cia–Reset hardware activo–Fallo captador
Interfase WSG desbloqueadaSeñales A, B, R válidas
Precaución
2) ¡Señales internas del módulo para fines de análisis de fallos!¡No están previstas para utilizarlas en módulos o tarjetas externas!
X391/X392
Módulos de avance Regulación a resolver (VR)8 Mantenimiento y diagnóstico
04.97

VR
10.00
VR/9-29 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Anexo
9.1 Bornes de conexiónTabla 9-1 Bornes de conexión
Nº deborne
Designa-ción 2) Función
Tipo1) Tensión típica/límites Sección máx.
56
14
24
20
75
15
16
96
9
22
X321/322
X321/322
X321/322
X321/322
X321/322
X321/322
X321/322
X321/322
X321/322
X321/322
Consigna de velocidad
Entrada diferencial
Consigna de veloc./intens.
Entrada diferencial
Velocidad real
Potencial de referencia
Valor real corriente activa
Activación limitación Icons
Potencial de desbloqueo
Conmutación regulación n/I
E
E
E
E
A
A
A
E
A
E
0V...10V
0V...10V
0V...10V
0V
0V...10V
+13V...30V
+24V
+13V...30V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
9
663
AS1
AS2
9
65.1
9
65.2
X331
X331
X331
X331
X332
X332
X332
X332
Potencial de desbloqueo
Desbloqueo de impulsos
Relé bloqueo antiarranque
Contacto libre de potencial
Potencial de desbloqueo
Desbl. de reguladores eje 1
Potencial de desbloqueo 3)
Desbl. de reguladores eje 2 3)
A
E
Ö
Ö
A
E
A
E
24V
+21V...30V
máx. 250VAC/1A
30VDC/1A
+13V...30V
24V
+13V...30V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
En la variante de un eje, X332, tiene la ocupación siguiente:Tabla 9-2 Bornes de conexión
Nº deborne
Designa-ción
FunciónTipo
1) Tensión típica/límites Sección máx.
9
65.1
15
258
X332
X332
X332
X332
Potencial de desbloqueo
Desbloqueo de reguladores
Potencial de referencia
Consigna de intensidad
A
E
A
A
+24V
+13V...30V
0V
0V...10V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1) E = Entrada, A = Salida, Ö = NC, S = NA (al señalizar: cerrado = High/abierto = Low)2) X321=1er eje, X322=2º eje3) sólo en versión de 2 ejes
Módulos de avance Regulación a resolver (VR)04.97
9
9.1 Bornes de conexión

VR
10.00
VR/9-30 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.2 Esquemas de bloques
9.2.1 Esquema de bloques de la regulación a resolver
R349
C135
C143
C134
R348
R454
R371
R374R623R422
R566
C6
R151
R624
R518
R675
R652
R323
S11 S2
S1
S4
X32
1
S3
S6
X30
1
S5
X35
1
Filt
ros
alis
./Eje
1
C172
Vis
ta p
or e
l lad
o de
com
pone
ntes
(la
do 2
)
Figura 9-1 Lado de componentes
Módulos de avance Regulación a resolver (VR)9.2 Esquemas de bloques
12.94

VR
10.00
VR/9-31 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
C147
C149R356
C148
R448R355
Glä
ttung
en/A
chse
2
Vis
ta p
or la
do d
e so
ldad
ura
(lado
1)
Com
pone
ntes
SM
D
Figura 9-2 Lado de soldadura
Módulos de avance Regulación a resolver (VR)12.949.2 Esquemas de bloque

VR
10.00
VR/9-32 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.2.2 Panorámica de bloques de interruptores DIL
12345678
123456789
10
12345678
12345678
12345678
123456789
10
123456789
10
12345678
Número de polos motor
Número de polos resolverCNSecuencia fases pistas A, B (WSG)Impulsos/vuelta interfase WSGDecalaje origen
Normalización intensidad real
Ganancia reg. intensidad (corriente activa)
Ganancia reg. intensidad (corriente reactiva)
Normalización velocidad real eje 1
Normalización velocidad real eje 2
Bloqueo integrador regulador N, eje 1
Número de polos motor
Número de polos resolverCNSecuencia fases pistas A, B (WSG)Impulsos/vuelta interfase WSGDecalaje origen
Bloqueo integrador regulador I, eje 1Bloqueo integrador regulador N, eje 2Bloqueo integrador regulador I, eje 2
2º eje es esclavo; rige sólo para regulación 2 ejesTemporizador eje 1
Señalización Listo/Fallo
Temporizador eje 2
Normalización intensidad real
Ganancia reg. intensidad (corriente activa)
Ganancia reg. intensidad (corriente reactiva)
Decalaje origen eje 1
Decalaje origen eje 2
Limitación consigna intensidad eje 1
Limitación consigna intensidad eje 2
Eje 1
Eje 2
Eje 1
Ejes 1 y 2
Ejes 1 y 2
Eje 2
Ejes 1 y 2
Ejes 1 y 2
S1
S2
S3
S4
S5
S6
S11
S12
Figura 9-3 Bloques de interruptores DIL
Módulos de avance Regulación a resolver (VR)9.2 Esquemas de bloque
04.97

VR
10.00
VR/9-33 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.3 Ocupación de los conectores
9.3.1 X311/X312, interfase captadores eje 1/eje 2
Conector D subminiatura, 25 polos, macho, inmovilización por tornillo UNC4-40,conexión por cable preconfeccionado.
Tabla 9-2 Ocupación de los conectores X311/X312
Señal Regulación a resolver Motor
SIN_PLUS 3 1
SIN_MINUS 4 2
M 5, 8, 24 –
COS_PLUS 6 11
COS_MINUS 7 12
RES_POS 9 10
RES_NEG 11 7
TEMP_PLUS 13 8
TEMP_MINUS 25 9
En caso de eje sin utilizar, v. apt. 3.4.
Regulación aresolver
Módulos de avance Regulación a resolver (VR)9.3 Ocupación de los conectores
04.97

VR
10.00
VR/9-34 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
9.3.2 X391/X392, interfase WSG eje 1/eje 2
Conector D subminiatura, 15 polos, macho, inmovilización por corredera, cone-xión por cable preconfeccionado.
Tabla 9-3 Ocupación de los conectores X391/X392
Señal Observación Tipo Regulación a resolver Numeric FM-CN
M WSG 1) Pol. de ref. 2 11 –9
A WSG 1) RS422A 3 1 –15
A_INV WSG 1) RS422A 4 9 –14
B WSG 1) RS422A 6 10 –13
B_INV WSG 1) RS422A 7 3 –12
R WSG 1) RS422A 12 4 –10
R_INV WSG 1) RS422A 13 12 –11
READY sólo X392 2) HCMOS ! 1 NC – NC
ER_IKL Diagnóstico 2) HCMOS ! 9 NC – NC
ER_TNL Diagnóstico 2) HCMOS ! 10 NC – NC
EN_WSG Diagnóstico 2) HCMOS ! 11 NC – NC
1) Interfase WSG estándar, tipo: RS422A / driver: 75ALS192
Precaución
2) ¡Señales internas del módulo para fines de análisis de fallos!¡No están previstas para utilizarlas en módulos o tarjetas externas!
Regulación aresolver
Módulos de avance Regulación a resolver (VR)9.3 Ocupación de los conectores
04.97

VR
10.00
VR/i-1 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Índice
AAdaptación del taco, VR/2-12Ajuste del tiempo de acción integral TN, VR/2-14Ajustes del regulador de intensidad, VR/1-5Ajustes estándar, VR/1-3Alisamientos, VR/3-16
BBloqueo integrador, VR/3-16Bornes de conexión, VR/9-29
CCompensación de deriva, VR/2-14Compensación eléctrica de peso, VR/3-17
DDecalaje de origen, ajuste fino, VR/3-15Diagnóstico, VR/8-27
EElementos de ajuste, con interfase estándar,
VR/4-19, VR/4-20Encendido, VR/7-25Esquema de bloques lado de componentes,
VR/9-30Esquema de bloques lado de soldadura, VR/9-31
GGanancia del regulador de intensidad, VR/1-5Ganancia Kp, VR/2-13Ganancia proporcional, VR/2-13
HHembrillas de medida, VR/8-27, VR/8-28
IIndicadores LED, VR/8-27Interfases de consigna, VR/4-19
LLado de componentes, VR/3-16, VR/9-30Lado de soldadura, VR/3-16, VR/9-31Limitación de consigna de intensidad, VR/3-15Limitación TN, VR/3-16
MMaestro/esclavo, VR/3-16, VR/3-17Mantenimiento y diagnóstico, VR/8-27Modo
esclavo con regulación I, VR/4-19esclavo, reg. I, VR/3-16, VR/3-17maestro con regulación n, VR/4-19maestro, reg. n, VR/3-16, VR/3-17
NNormalización del valor real de intensidad,
VR/1-5Normalización del valor real de velocidad, VR/1-4Número de polos, VR/1-3Número de rayas, interfase WSG, VR/3-15
OOcupación de los conectores, VR/9-33Orden de las pistas A, B (WSG), VR/3-15
PProcesamiento de informaciones de posición,
VR/3-15Puesta en marcha
abreviada, VR/1-3estándar, VR/1-3etapas, VR–ii
SSeñalización fallo, VR/3-16
TTablas de adaptación, VR/1-5Temporizador, VR/3-16Tiempo de acción integral, VR/2-14Tiempo de acción integral/regulador de velocidad,
VR/2-14TN (tiempo de acción integral), VR/2-14
Módulos de avance Regulación a resolver (VR)Índice
10.00

VR
10.00
VR/i-2 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de avance Regulación a resolver (VR)Índice
Espacio para sus notas
10.00

HS
HS–i Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de cabezal (HS)
1 Primeros pasos HS/1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Guía para la puesta en marcha HS/1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Consejos para la puesta en marcha HS/1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Elementos de mando y señalización, parámetros de mando HS/1-8. . . . . . .
1.4 Panorámica de datos de ajuste HS/1-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Conexiones HS/1-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Determinación y ajuste de la configuración del sistema HS/2-15. . . . . . . . . . . . . . . .
2.1 Juegos de parámetros de motores y convertidores HS/2-15. . . . . . . . . . . . . . . 2.1.1 Configuración del sistema con motores estándar HS/2-15. . . . . . . . . . . . . . . . . 2.1.2 Configuración del sistema con motores especiales (Motores externos) HS/2-172.1.3 Configuración del sistema con motores estrella/triángulo,
2 motores HS/2-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Aplicaciones estándar HS/2-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.1 Visualización de estado HS/2-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.2 Versión de firmware y variante de módulo HS/2-26. . . . . . . . . . . . . . . . . . . . . . . 2.2.3 Parámetros de ajuste para aplicaciones estándar HS/2-27. . . . . . . . . . . . . . . .
2.3 Otras aplicaciones HS/2-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.1 Parada orientada del cabezal (vía función auxiliar M19 del CN) HS/2-30. . . . 2.3.2 Eje C HS/2-31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.3 Posicionamiento del cabezal HS/2-31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.4 Modo mando de par (configuración maestro/esclavo) HS/2-44. . . . . . . . . . . . . 2.3.5 Función monitor HS/2-48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.6 Eje HPC (FW 2.00) HS/2-48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.7 Limitación máxima de corriente (Limitación I2t, a partir de FW 3.1) HS/2-54.
3 Parametrización de las interfases del convertidor HS/3-55. . . . . . . . . . . . . . . . . . . . . .
3.1 Interfase de consigna analógica de velocidad HS/3-55. . . . . . . . . . . . . . . . . . . .
3.2 Bornes de entrada HS/3-58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.1 Funciones de bornes cableadas (de asignación fija) HS/3-58. . . . . . . . . . . . . . 3.2.2 Funciones de bornes programables HS/3-59. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Bornes de salida HS/3-61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.1 Funciones de relés cableadas (de asignación fija) HS/3-61. . . . . . . . . . . . . . . . 3.3.2 Funciones de relés programables HS/3-61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.3 Función de relé variable HS/3-64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.4 Señales del captador en motor para CN HS/3-65. . . . . . . . . . . . . . . . . . . . . . . . 3.3.5 Salidas analógicas HS/3-66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Optimización de reguladores HS/4-69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Optimización del regulador de velocidad HS/4-69. . . . . . . . . . . . . . . . . . . . . . . .
4.2 Optimización del regulador de intensidad HS/4-75. . . . . . . . . . . . . . . . . . . . . . .

HS
10.00
HS–ii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5 Diagnóstico y análisis de fallos HS/5-77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Herramientas de diagnóstico HS/5-77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.1 Indicación en display de valores medidos HS/5-77. . . . . . . . . . . . . . . . . . . . . . . 5.1.2 Indicaciones de estado HS/5-78. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.3 Parámetros de diagnóstico HS/5-81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.4 Hembrillas de medida X1, X2, IR HS/5-82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.5 Memoria de valores mínimos/máximos HS/5-84. . . . . . . . . . . . . . . . . . . . . . . . . 5.1.6 Función de registro de transitorios HS/5-84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.7 Mando intensidad/frecuencia HS/5-86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Análisis de fallos HS/5-87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.1 Indicación y acuse de fallos HS/5-87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.2 Lista de indicaciones de fallo HS/5-88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Anexo HS/6-93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Diagrama de flujo para puesta en marcha abreviada HS/6-94. . . . . . . . . . . . . .
6.2 Códigos para partes de potencia y motores estándar HS/6-99. . . . . . . . . . . . .
6.3 Conexiones HS/6-103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4 Ocupación de conectores HS/6-108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Direcciones de variables en RAM HS/6-112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6 Parámetros de ajuste y control (lista de parámetros) HS/6-113. . . . . . . . . . . . . .

HS
10.00
HS/1-3 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Primeros pasos
Precaución
El funcionamiento correcto y seguro de este equipo presupone un transporteadecuado asi como un almacenamiento, instalación y montaje correctos y ma-nejo y mantenimiento conformes.
Si no se observan las advertencias preventivas pueden aparecer lesiones gra-ves o daños materiales.
Los módulos y tarjetas incluyen componentes con sensibilidad electrostática.Por ello, respetar las instrucciones antiestáticas que figuran en el prólogo.
Nota
El módulo con ref. 6SN1121–0BA11–0AA1 sólo puede funcionar con elfirmware a partir de 3.00.
Los módulos con las referencias:6SN1121–0BA11–0AA06SN1121–0BA12–0AA06SN1121–0BA13–0AA0
sólo pueden funcionar con el firmware hasta 2.xx.
Indicación
Para la puesta en servicio de la regulación de motor de cabezal con interfaz deconsignas analógica está disponible un software de puesta en servicio.
Datos de pedido para el software:véase el catálogo NC 60 (referencia: E86060–K4460–A101–A8)
Datos de pedido para la documentación:Software de puesta en servicio para módulos de motor de cabezal y asíncronosReferencia: 6SN1197–0AA30–0EP1
Indicación
Definición del motor
Motor estándar: Motor contenido en el catálogo Siemens.
Motor externo: Motores de otras empresas.
Motor especial: Motor específico para el cliente fabricado por Siemens.
Módulos de cabezal (HS)1 Primeros pasos
1

HS
10.00
HS/1-4 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.1 Guía para la puesta en marcha
Las instrucciones de puesta en marcha presentan las acciones en el orden desu sucesión en la práctica.
Para la puesta en marcha de las aplicaciones estándar que se contenten con elestado de fábrica en lo que se refiere a la configuración de las interfases(apt. 1.5) y la optimización de reguladores, sólo tienen interés las etapas depuesta en marcha impresas en negrita.
Juegos de parámetrospara motor y equipoconvertidor Motores estándar Motores especiales Motores estrella/
triángulo, 2 motores
Aplicaciones estándar
Otras aplicaciones Función aux. M19 Eje C Posicionamiento del
cabezal Modo mando de par Función monitor Eje HPC
1 Primeros pasos 2 Config. del sistema 3 Interfases convertidor 4 Optimización reg.
Guía para la puestaen marcha
Consejos para pue-sta en marcha
Elem. de mando e in-dicación, parámetrosde mando
Panorámica de da-tos de ajuste
Conexiones
Interfase de consignade velocidad analógica
Bornes de entrada
Bornes de salida
Reg. de velocidad
Reg. de intensidad
5 Diagnóstico, análisis de fallos
Medios de diagnóstico Análisis de fallos
6 Anexo
Diagr. flujo para puesta en marcha abrev.
Códigos para partes de potencia y motores estándar
Sinopsis de conexiones
Ocupación de conectores
Direcciones de variables en RAM
Datos de ajuste y de control
Figura 1-1 Etapas de puesta en marcha
Estructura de lasinstrucciones depuesta en marcha
Módulos de cabezal (HS)1.1 Guía para la puesta en marcha
12.94
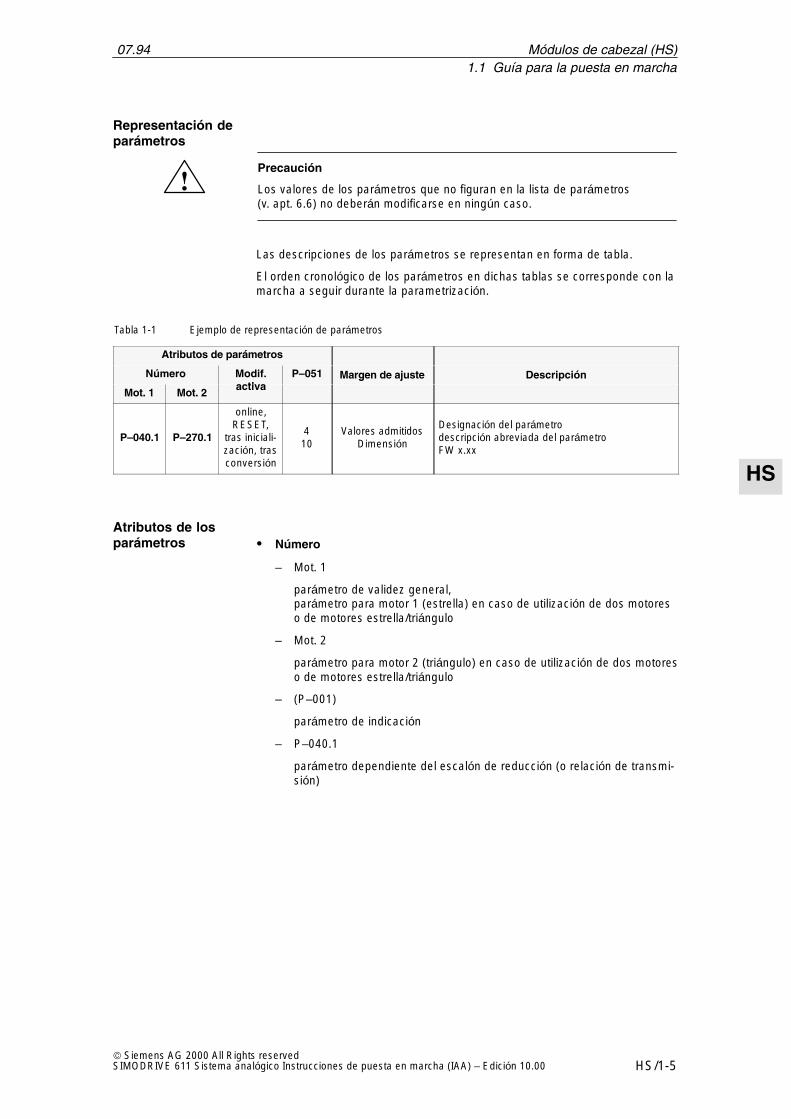
HS
10.00
HS/1-5 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Precaución
Los valores de los parámetros que no figuran en la lista de parámetros (v. apt. 6.6) no deberán modificarse en ningún caso.
Las descripciones de los parámetros se representan en forma de tabla.
El orden cronológico de los parámetros en dichas tablas se corresponde con lamarcha a seguir durante la parametrización.
Tabla 1-1 Ejemplo de representación de parámetros
Atributos de parámetros
Número Modif.acti a
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2activa
g j p
P–040.1 P–270.1
online,RESET,
tras iniciali-zación, trasconversión
410
Valores admitidosDimensión
Designación del parámetrodescripción abreviada del parámetroFW x.xx
Número
– Mot. 1
parámetro de validez general,parámetro para motor 1 (estrella) en caso de utilización de dos motoreso de motores estrella/triángulo
– Mot. 2
parámetro para motor 2 (triángulo) en caso de utilización de dos motoreso de motores estrella/triángulo
– (P–001)
parámetro de indicación
– P–040.1
parámetro dependiente del escalón de reducción (o relación de transmi-sión)
Representación deparámetros
Atributos de losparámetros
Módulos de cabezal (HS)1.1 Guía para la puesta en marcha
07.94

HS
10.00
HS/1-6 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Modif. activa
– online
Modificación inmediatamente activa.
– RESET
Es necesario desconectar y volver a conectar el equipo
– tras conversión
La puesta a 1H activa el lanzamiento de un programa de cálculo a fin deque el parámetro se reponga automáticamente a 0H (P–143, P–177,P–237, P–239).
– tras inicialización (carga inicial)
La puesta a 1H de P–097 activa una operación de inicialización.
P–051
Parámetro de protección en escrituraSupresión de la protección en escritura ajustando el valor 4H ó 10H
Para determinadas palabras de mando, la función se activa poniendo a “1” losbits.
Ejemplo: Bit 8 0100H ó Bit 6 0040H Bit 9 0200H ó Bit 7 0080H
Una combinación de varias funciones se entra en forma de adición hexadeci-mal.
Ejemplo: Bit 8 + Bit 9 0300H ó Bit 6 + Bit 7 00C0H
FW x.xx
Identificación de la extensión funcional o de parámetros en función de laversión de firmware. La extensión está disponible a partir de la versión defirmware indicada.
Margen de ajuste
Descripción
Módulos de cabezal (HS)1.1 Guía para la puesta en marcha
10.94

HS
10.00
HS/1-7 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.2 Consejos para la puesta en marcha
vía
Elementos de mando y señalización (v. apt. 1.3)
Interfase RS232C de un PC compatible AT equipado con software de pue-sta en marcha (v. Prólogo)
Si es necesario reinicializar un equipo convertidor, proceder de la forma si-guiente:
Dado el caso, salvar los datos de ajuste (parámetros).
Suprimir la protección en escritura: ajustar P–051 a 4H
Iniciar la operación de inicialización: poner P–097 a 0H
Sobreescribir los parámetros en la memoria de parámetros de máquina:poner P–052 a 1H y esperar a la puesta a 0H de P–052.
Reset:Desconectar y volver a conectar el equipo 2 s después de que se apague elvisualizador: P–095 ó P–96 deberá aparecer en el visualizador.
Efectuar la inicialización (apt. 2.1)
La sustitución del firmware puede realizarse auxiliándose del software interac-tivo de puesta en marcha para módulos de cabezal y módulos de motorasíncrono, a partir de la versión V2.00 o superior.
Versión del firmware Módulo
antes de FW 3.00 6SN1121–0BA1–0AA0
a partir de FW 3.00 6SN1121–0BA11–0AA1
Forma de proceder:
Salvar los parámetros
Sustituir el firmware usando el software de puesta en marcha
Efectuar la inicialización con impulsos y reguladores bloqueados (apt. 2.1)
Recargar los parámetros salvados
Transferir los parámetros a la memoria de parámetros de máquina (apt. 1.3)
El software de puesta en marcha permite guardar en disquete los datos de aju-ste del convertidor (parámetros). Por ello, para la puesta en marcha de otrosconvertidores en serie, es necesario proceder de la forma siguiente:
1. – Efectuar la inicialización estando bloqueados los impulsos y los reguladores: P–095, introducir código parte de potencia según Tab. 6–1. 1)
– El código del motor y el número de rayas del captador del mismo están memorizados en el disquete por lo que no hace falta introducirlos.– Arrancar la inicialización.
2. Cargar desde el disquete los datos de ajuste y guardarlos.
1) Las partes de potencia con ref. 6SN112–1A0–A1 se reconocen automáticamente a partir de FW 3.00. Ya noes posible/necesario introducir el valor de P–095.
Posibilidades depuesta en marcha
Reinicializacióndel equipo conver-tidor (si es necesa-rio)
Sustitución delfirmware (si es ne-cesario)
Puesta en marcha deseries de máquinas,sustitución delmódulo y de compo-nentes
Módulos de cabezal (HS)1.2 Consejos para la puesta en marcha

HS
10.00
HS/1-8 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.3 Elementos de mando y señalización, parámetros de mando
Los módulos de cabezal SIMODRIVE 611 Sistema analógico incorporan en sufrontal los siguientes elementos de mando y señalización para la puesta enmarcha y parametrización:
3 teclas ( + P –y )
un display LCD de 6 cifras
Las funciones de los elementos de mando se presentan en base al ejemplo delparámetro P–039.
Los parámetros dependientes del escalón de reducción se representan por unnúmero de subparámetro (p. ej. P–039.1 a P–039.8).
Número deparámetro
Número de sub-parámetros
Valor del parámetro
Elementos demando y señaliza-ción
Módulos de cabezal (HS)1.3 Elementos de mando y señalización, parámetros de mando
07.94

HS
10.00
HS/1-9 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
Si la operación de carga (P–052) se interrumpe por un corte de red, los valoresmodificados se pierden y el equipo visualiza el código de error “F–07” tras elrestablecimiento de la tensión de red. Una vez acusada la señalización de er-ror “F–07” (v. apt. 5.2.2) es posible ajustar los nuevos valores de los paráme-tros.
Tabla 1-2 Parámetros de mando
Atributos de parámetrosMargen deNúmero Modif. P–051 Margen de
aj steDescripción
Mot. 1 Mot. 2 activa ajusteDescripción
P–051P–151
– online – 0...7FFF Hex Protección en escrituraSupresión de la protección en escritura por introducciónde 4H ó 10H.
P–052P–152
– online 4 0...1 Hex Carga de parámetros en FEPROMLa transferencia de los parámetros en la memoria deparámetros máquina se lanza poniendo a 1H.Al final de la transferencia, el parámetro retorna a 0H.
P–053 – online 4 0...FFFF Hex Palabra de mando
Bit Valor
0
0000H
0001H
Excitación del relé “Listo” en ausenciade fallo y en presencia de desbloqueode impulsos y de reguladores.Escitación del relé “Listo” en ausenciade fallos.
1
0000H
0002H
Para parada rápida del g. de rampas, laconsigna de velocidad se pone a cero,el motor sigue magnetizado.Tras la parada del motor se bloqueanlos impulsos.
40000H0010H
Alisamiento consigna vel. inactivoAlisamiento consigna vel. activo
50000H0020H
Alisamiento valor real vel. inactivoAlisamiento valor real velocidad activosi simultáneamenteP090 Bit 3=0 FW 3.0
8910
Frecuencia pul-sación ondulador
[kHz]
0000H0100H0200H0300H
3,22,8 FW 3.06,35,0 FW 3.0
Bit 10/Bit 9/Bit 8
Nota: Una frec. de puls. > 3,2 kHzexige reducir la potencia (v. ta-bla 1-3).
0400H0500H0600H0700H
4,73,9 FW 3.07,85,9 FW 3.0
Parámetros demando
Módulos de cabezal (HS)1.3 Elementos de mando y señalización, parámetros de mando
04.97

HS
10.00
HS/1-10 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-2 Parámetros de mandoAtributos de parámetros
M dNúmero Modif.activa
P–051 Margen deajuste
Descripción
Mot. 1 Mot. 2 activa ajustep
P–053 4 110000H0800H
Aviso de fallo F–79 no inhibido, Aviso de fallo F–79 inhibido
120000H1000H
Correc. generador rampas activoCorrec. generador rampas inactivo
130000H2000H
Evaluación consigna vel. bipolarEvaluación consigna vel. unipolar FW2.00
150000H8000H
Actúa la presentación cíclica de losnúmeros de parámetroNo actúa la presentación cíclica de losnúmeros de parámetro, FW 3.0
P–090 – online 10 0...FFFF Hex Palabra de mando
Bit Valor
0
0000H0001H
Formato parámetro indicación hex.Formato parámetro indicación dec.ATENCION ¡Límites de ajuste de parámetros noactuan en formato hexadecimal!
10000H0002H
Aviso de fallo F–09 activadoAviso de fallo F–09 inhibido FW 2.00
20000H
0004H
Vigilancia ampliada para F-09 inhibidaVigilancia ampliada para F-09 activada(cortocircuito M/P5) FW 3.00
RESET 10
3
0000H
0008H
Ciclo regulador velocidad [s]Modo normal 1000Eje HPC sin filtro 500
con filtro 600posible a partir de FW 3.0Modo normal 525Eje HPC sin filtro 300
con filtro 350Un cambio en bit 3 sólo actúa tras al-macenar en FEPROM y Red OFF/ON
Online 104
0000H0010H
Reg. veloc. sin bloqueo integrador Reg.veloc. con bloqueo integrador (paraM19)
50000H0020H
Aviso fallo F-18 inhibidoAviso fallo F-18 activado (FW 3.00)
6
0000H
0040H
En caso de actuar la limitación, integra-dor de regulador de velocidad ajustadoa la diferencia entre límite de par y ac-ción PEn caso de actuar la limitación, integra-dor de regulador de velocidad detenidoFW 2.00
RESET 10 8 0100H Al activar este bit se conecta un sencillomodelo de flujo. Esto permite una ace-leración más rápida y uniforme si, conla consigna de velocidad de giro acti-vada, se arranca con liberación del re-gulador.
RESET 10 9 0000H0200H
Selección evaluación rectangular capta-dor de motorseno/cosenoRectángulo
Módulos de cabezal (HS)1.3 Elementos de mando y señalización, parámetros de mando

HS
10.00
HS/1-11 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Es posible parametrizar diferentes frecuencias de pulsación de ondulador; re-spetar la reducción de intensidad que esto conlleva.
Tabla 1-3 Intensidad en función de la frecuencia de pulsación del ondulador, HSA, analógico fpuls
Nºcódigo
67
1389
101112
fT=7,80 kHzfT=6,30 kHzfT=4,70 kHzfT=3,20 kHz
Tipomódulopotencia
(LT)
50 A80 A
108 A120 A160 A200 A300 A400 A
–0CA–0DA–0LA–0GA–0EA–0FA–0JA–0KA
Referencia6SN1123–1AA0–6SN1124–1AA0–6SN1135–1BA1–
24/32/3230/40/5145/60/7645/60/7660/80/10285/110/127
120/150/193200/250/257
20/26/2626/34/4439/52/6539/52/6551/68/86
73/95/109/101/127/163169/211/217
15/20/2021/28/36/32/43/5432/43/5441/54/6960/78/90
81/102/131/135/169/174
10/14/1417/23/2926/34/4326/34/4331/42/5348/63/7262/78/101
104/130/134
In/Is6/Imáxen A
In/Is6/Imáxen A
In/Is6/Imáxen A
In/Is6/Imáxen A
Nºcódigo
67
1389
101112
fT=5,90 kHzfT=5,00 kHzfT=3,90 kHzfT=2,80 kHz
Tipomódulopotencia
(LT)
50 A80 A
108 A120 A160 A200 A300 A400 A
–0CA–0DA–0LA–0GA–0EA–0FA–0JA–0KA
Referencia6SN1123–1AA0–6SN1124–1AA0–6SN1135–1BA1–
24/32/3230/40/5145/60/7645/60/7660/80/10285/110/127
120/150/193200/250/257
22/29/2928/37/4842/56/7142/56/7156/74/95
79/103/119111/139/179185/232/238
19/25/2525/33/4237/50/6337/50/6349/65/8371/91/10698/122/157163/203/209
16/21/2122/30/3834/45/5734/45/5743/58/7363/82/95
86/108/139144/180/185
In/Is6/Imáxen A
In/Is6/Imáxen A
In/Is6/Imáxen A
In/Is6/Imáxen A
a partir de FW 3.00
Módulos de cabezal (HS)1.3 Elementos de mando y señalización, parámetros de mando
04.97

HS
10.00
HS/1-12 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.4 Panorámica de datos de ajuste
P–0
95,
P–0
96,
P–0
98,
P–0
97
P–1
59,
P–1
60,
P–1
61,
P–1
62,
P–1
63,
P–1
64,
P–1
65,
P–1
66,
P–1
67,
P–1
68,
P–1
69,
P–1
70,
P–1
71,
P–1
72,
P–1
73,
P–1
74,
P–1
75,
P–1
76,
P–1
77
P–2
19,
P–2
20,
P–2
21,
P–2
22,
P–2
23,
P–2
24,
P–2
25,
P–2
26,
P–2
27,
P–2
28,
P–2
29,
P–2
30,
P–2
31,
P–2
32,
P–2
33,
P–2
34,
P–2
35,
P–2
36,
P–2
38
P–2
37,
P–2
39
P–1
80
Par
ámet
ros
dein
icia
lizac
ión
Jueg
o pa
rám
. m
otor
Est
rella
M
otor
1
Jueg
o pa
rám
. m
otor
Triá
ngul
o, M
otor
2
Car
ga p
arám
.m
otor
Car
ga p
arám
.m
otor
,D
esbl
oque
o co
nmut
ació
n
Mo
t. e
stre
lla/t
rián
gu
lo, 2
mo
t.
E1
X42
1
X43
1
X44
1
X45
1E2
E3
E4
E5
E6
E7
E8
E9
56 14 24 8
A11
A21
A31
A41
A51
A61
A91
A92 X1
X2
Sal
idas
an
aló
gic
as
En
trad
a te
mp
erat
ura
mo
tor
P–0
63,
P–0
64,
P–0
65,
P–2
91
En
trad
a ca
pta
do
r ca
bez
alP
–141
Sal
ida
cap
tad
or
mo
tor
P–0
33 P–0
54,
P–0
55,
P–0
56,
P–0
58
Co
nsi
gn
a d
e ve
loci
dad
P–0
14,
P–0
15,
P–0
24,
P–0
30
P–1
14,
P–1
15,
P–1
49P
–113
Sel
ec.
can
al
P–0
81
P–0
82
P–0
83
P–0
84
P–0
85
P–0
86
P–0
87
P–0
88
P–0
89
P–2
41
P–2
42
P–2
43
P–2
44
P–2
45
P–2
46
P–2
47
Alis
amto
.
P–0
18,
P–0
53
con
sig
na
velo
cid
ad
Gen
. de
P–0
16,
P–0
17
ram
pas
Red
on
deo
P–0
19
Velo
cid
ad
P–0
29,
P–2
64
máx
ima
Lim
itac
ión
de
par
P–0
39,
P–0
40,
P–0
41,
P–0
42,
P–0
43,
P–0
50P
–269
, P
–270
, P
–271
, P
–272
, P
–273
, P
–290
Reg
ula
do
r d
e ve
loci
dad
P–0
31,
P–0
32,
P–2
65,
P–2
66
P–1
95,
P–1
96,
P–1
98,
P–1
99,
P–2
01,
P–2
02
P–0
35,
P–0
44,
P–0
45,
P–0
46,
P–0
75,
P–2
74
Gan
anci
a P,
t. a
cció
n in
teg
ral
Ad
apta
ció
n
P–2
03,
P–2
83,
P–2
84,
P–2
85,
P–2
86,
P–2
88
Alis
amie
nto
co
nsi
gn
a d
e p
ar
Filt
ro
P–1
03,
P–1
04,
P–1
17
dig
ital
P–1
18,
P–2
76,
P–2
77P
–280
, P
–281
Reg
ula
do
r d
e
P–1
16,
P–1
20,
P–2
78,
P–2
92
Osc
ilaci
ón
P–1
54,
P–1
55,
P–1
56,
P–1
57
Par
ámet
ros
de
man
do
gen
eral
es
P–0
51,
P–0
52,
P–0
53,
P–0
90,
P–1
51,
P–1
52
Par
ada
sin
gir
o
P–0
22,
P–2
61
Par
ámet
ros
de
fun
ció
n 1
P–1
26,
P–1
29,
P–1
30,
P–1
31
Par
ámet
ros
de
fun
ció
n 2
P–1
44,
P–1
45,
P–1
46,
P–1
48,
P–1
49
Par
ámet
ros
man
do
P–1
41,
P–1
42,
P–1
43
Co
nsi
gn
a d
e p
osi
ció
nP
–121
, P
–122
, P
–123
,
Reg
ula
do
r d
e p
osi
ció
n
P–1
34,
P–1
35,
P–1
36,
P–1
37,
P–1
38,
P–1
39
Po
sici
on
amie
nto
Hem
bri
llas
med
ida
P–0
72,
P–0
73,
P–0
74,
P–0
76,
P–0
77,
P–0
80
P–0
95,
P–0
96,
P–0
98,
P–0
97
P–1
59,
P–1
60,
P–1
61,
P–1
62,
P–1
63,
P–1
64,
P–1
65,
P–1
66,
P–1
67,
P–1
68,
P–1
69,
P–1
70,
P–1
71,
P–1
72,
P–1
73,
P–1
74,
P–1
75,
P–1
76,
P–1
77
Par
ámet
ros
dein
icia
lizac
ión
Jueg
o pa
rám
.m
otor
Car
ga p
arám
.m
otor
Mo
tor
esp
ecia
lP
–095
,P
–096
,P
–098
,P
–097
Par
ámet
ros
dein
icia
lizac
ión
Mo
tor
está
nd
ar
en s
ent.
op
ues
to
Inic
ializ
ació
n (
carg
a in
icia
l)
Um
bra
les
de
man
do
de
relé
P–0
21,
P–0
23,
P–0
27,
P–0
47,
P–2
60,
P–2
62,
P–2
63
Fu
nci
ón
de
relé
var
iab
leP
–185
, P
–186
, P
–187
,P
–188
, P
–189
, P
–190
,P
–191
, P
–192
, P
–193
, P
–194
, P
–247
Fu
nci
on
es d
e d
iag
nó
stic
o
P–1
79,
P–1
81
P–2
06 b
is P
–218
Mín
/Máx
P–3
11,
P–3
12,
P–3
13
Fu
nci
ón
reg
istr
ado
r tr
ansi
t.
Man
do
I/f
P–2
89,
P–2
93
P–1
24,
P–1
25
En
trad
a ca
pta
do
r m
oto
rP
–036
, P
–037
, P
–038
, P
–098
, P
–267
, P
–268
Co
ns.
anal
óg
.
Fu
nci
on
esd
e re
lé
Bo
rnes
de
des
blo
qu
eop
rog
ram
.
AD
AD
?!
Inve
rtir
fu
nci
on
es r
elé
Fu
nci
on
esd
e re
lép
rog
ram
abl.
Eje
HP
C
Co
nfi
gu
raci
ón
sis
tem
aP
–109
, P
–110
, P
–149
Co
ns.
vel
oci
dad
P–0
93,
P–0
94
Op
tim
izac
ión
de
reg
ula
do
res
P–0
53,
P–0
91,
P–0
92,
P–1
06,
P–1
07,
P–1
08,
P–1
11,
P–1
12,
P–1
17,
P–1
18,
P–1
19
Vig
ilan
cia
des
lizam
ien
to
P–3
44,
P–3
45,
P–3
46
P–0
53,
P–2
58
P–0
62P
–248
,
P–3
40,
P–3
41,
P–3
43,
HP
C
inte
nsi
dad
cab
ezal
ram
pa
P–0
12,
P–0
13,
P–0
26,
P–0
66,
P–0
67,
P–0
68,
P–0
69,
P–0
71,
P–0
78P
–079
P–2
56,
P–2
57
Vig
ilan
cia
dn
/dt,
P–2
0
BE
RO
P–1
41X
433
Co
nsi
gn
a d
e p
arP
–048
, P
–049
, P
068
Eje
C
M 1
9
X41
2
X43
2
Figura 1-2 Datos de ajuste
Módulos de cabezal (HS)1.4 Panorámica de datos de ajuste

HS
10.00
HS/1-13 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.5 Conexiones
PE2Bornes de conexión motor
X432 Captador cabezal, Bero o salida captador hacia CN
PE1 W2V2U2
P 600
M 600Circuito intermedio
X151 Bus interno X351
X412 Cap. motorRON 350
Display LCD
+ P –
X411 InterfaseRS232C
Entradas
X431
X421
Hembrillas de medida
ncons2
ncons1M
M
X451
CDA 2
CDA 1
X441
2º límite Md–1)
DIDRHSS
JnrealJ < nmín1)
JnrealJ < nx1)
Salidas
¡Precaución!
No conectar captadores de cabezal alas unidades de regulación de cabezal(Ref. 6SN11–BA13–0A0). De no respetarse esto, hay riesgo dedaño del equipo y del captador de cabe-zal.
Escalón bit 01)
Escalón bit 21)Escalón bit 11)
Tensión desbloqueo
663
A91
A92
5614248
6581
E1E2E3E4
E5E6E7E8E99
289A11A21A31A41A51A61672
673674
AS1AS2
TH = 01)
Reset1)
M191)
Mando de Md1)
Oscilación1)
Sobretemp. motor1)
Sobretemp. convertidor1)
Listo/Fallo
Contacto señalizaciónBloqueo antiarranque
nreal = ncons1)
JMdJ < Mdx1)
CDA 4CDA 3
M
X2X1
IR
X4332) Conexión Bero
PE3
Figura 1-3 Conexiones
1) Estado de fábrica de los bornes y funciones de relé programables
2) sólo en ref. 6SN1121–0BA11–0AA1
Módulos de cabezal (HS)1.5 Conexiones
04.97

HS
10.00
HS/1-14 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de cabezal (HS)1.5 Conexiones
Espacio para sus notas

HS
10.00
HS/2-15 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Determinación y ajuste de laconfiguración del sistema
Precaución
Un valor incorrecto en P–098 puede provocar la aceleración del motor a veloci-dades exageradas y hacer inoperantes los B.64 (NE) y B.65 (bloqueo de regu-lador). Sólo el B.63 (bloqueo de impulsos específico de eje) actúa si está “alaire”, es decir abierto.
2.1 Juegos de parámetros de motores y convertidores
2.1.1 Configuración del sistema con motores estándar
Tabla 2-1 Inicialización
Atributos de parámetros
Número Modif.activa
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2activa
g j p
P–095 – trasinicializ.
– 6...13 Dec Código de parte de potenciaValor por defecto: 7 (apt. 6.2) a partir de FW 3.00Valor por defecto: 31)
P–096 – trasinicializ.
– 101...429 Dec Código del motorValor por defecto: 101 (apt. 6.2)
P–098 – trasinicializ.
– 128...4096 Dec Número de rayas (imp./vuelta) del captadormotorValor por defecto: 2048 para 1PH4, 1PH6A adaptar para 1PH2 y captador de rueda dentada
P–097 – – – 0...1 Hex InicializaciónIndicación “SEtUP” en el displayLa combinación motor/parte de potencia seleccio-nada se carga en la memoria de datos demáquina.
Visualización “P–000” aparece tras inicializaciónterminada con éxito.
1) Las partes de potencia con ref. 6SN12–1A0–A1 se reconocen automáticamente a partir de la FW 3.00. En tal caso ya no es posible modificar P–095.
Inicialización
Módulos de cabezal (HS)2.1 Juegos de parámetros de motores y convertidores
2

HS
10.00
HS/2-16 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-2 Operación con alimentación no regulada (UE)
Atributos de parámetros
Número Modif.activa
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2activa
g j p
P–173 – trasconversión
10 100...6000 r/min Vel. de paso a debilitamiento de campoMultiplicar valor iniz. por factor Ured 0,002 1
V(da 0,8 para Ured=400V)
P–176 – trasconversión
10 1...150 % Fac. de reducción par de desengancheMultiplicar valor iniz. por factor (Ured 0,002(da 0,64 para Ured=400V)
)21V
P–177 – online 10 0...1 Hex Lanzar cálculo de parámetros motorSe lanzan los cálculos para el motor definido. “99” está inscrito en P–096.
P–052 – online 4 0...1 Hex Carga de parámetros en FEPROM
Operación con ali-mentación no re-gulada
Módulos de cabezal (HS)2.1 Juegos de parámetros de motores y convertidores
12.94

HS
10.00
HS/2-17 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.1.2 Configuración del sistema con motores especiales (Motores externos)
Indicación
Si se utilizan motores especiales, las características de dichos motores de-berán acordarse con la sucursal SIEMENS competente.
Inicialización de motores especiales
Juego de parámetros de motores
Características para consigna de flujo y de la inductancia principal
Para cargar un motor externo, se tiene que efectuar primero una inicializacióncon un motor estándar (número de motor 101 a 429) cuyos datos de motor cor-responden aproximadamente a los del motor externo. Partiendo de estos datosde motor, se pueden realizar las adaptaciones necesarias para el motor 1 en elárea P–158 a P–176.
El cálculo necesario se inicia con P–177=1. Una vez terminado el cálculo,P–177 se vuelve a ajustar a 0. Para la memorización, se ajusta P–052=1 H.
Tabla 2-3 Inicialización de motores especiales
Atributos de parámetros
Número Modif.activa
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2activa
g j p
P–095 – tras inicia-liz.
– 4...13 Dec Código de parte de potenciaValor por defecto: 7 (apt.6.2) a partir de FW 3.00Valor por defecto: 31)
P–096 – tras inicia-liz.
– 101...429 Dec Código del motorValor por defecto: 101 (apt.6.2)Introducción del código correspondiente a un mo-tor estándar cuyas características sean las másparecidas al motor especial.
P–098 – tras inicia-liz.
– 128...4096 Dec Número de rayas del captador motorValor por defecto: 2048
P–097 – – – 0...1 Hex InicializaciónIndicación “SEtUP” en el displayLa combinación motor/parte de potencia seleccio-nada se carga en la memoria de datos demáquina.
Visualización “P–000” aparece tras inicializaciónterminada con éxito.
1) Las partes de potencia con ref. 6SN112–1A0–A1 se reconocen automáticamente a partir de la FW 3.00.En tal caso ya no es posible modificar P–095.
Sinopsis
Inicialización demotores especia-les
Módulos de cabezal (HS)2.1 Juegos de parámetros de motores y convertidores

HS
10.00
HS/2-18 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Para motores especiales es necesario entrar los parámetros de los mismos.La lista de parámetros (P–159 a P–176) figura en el apt. 6.6.
Tabla 2-4 Juego de parámetros de motor
Atributos de parámetros
Número Modif.activa
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2activa
g j p
P–158 – online 4 0,000 mH ...65,535 mH
a partir de FW 3.00Los motores de baja dispersión precisan a su en-trada una bobina serie a fin de alisar las intensida-des de fase. Para el convertidor, la bobina serietiene el mismo efecto que una reactancia dispersade estator más elevada, P169/229.Hasta ahora, P169/P229 debían adaptarse amano. P158 y P294 afectan la limitación de de-senganche (pérdida de estabilidad) y los ajustesprevios del regulador de intensidad.
P–159a
P–176–
tras con-versión
10 v. apt. 6.6Datos de motor para el motor 1Introducción de los datos de motor para el motorespecial
P–177 – online 10 0...1 Hex Lanzar cálculo de parám. motor 1 (P–096)Se lanzan los cálculos para el motor definido. “99” está inscrito en P–096.
P–052 – online 4 0...1 Hex Carga de parámetros en FEPROM
Juego de paráme-tros de motor
Módulos de cabezal (HS) 04.972.1 Juegos de parámetros de motores y convertidores

HS
10.00
HS/2-19 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-5 Característica de la consigna de flujo y de la inductancia principal
Atributos de parámetrosM d jNúmero Modif.
activaP–051 Margen de aju-
steDescripción
Mot. 1 Mot. 2activa ste
p
P–172 – tras con-versión
10 10...10000 r/min Velocidad lím. superior característica Xh(característica de la inductancia principal)
P–173 – tras con-versión
10 100...6000 r/min Vel. de paso a debilitamiento de campoMarca inicio de oper. con debilitamto. de campoen caract. de const. de flujo y vel. inf. de carac. Xh
Operando con alim. no regulada, el valor determi-nado debe multiplicarse por el factor Ured 0,002
1V
(da 0,8 para Ured=400V)
P–175 – tras con-versión
10 100...300 % Ganancia característica Xh
100 % = reactancia Xh const. en todo el margen vel.
P–175 =Xh2
Xh1
(para n=P–172)
(para n=P–173). 100 %
P–176 – tras con-versión
10 1...150 % Factor de reducción par de desenganchePto. intervención del límite de par de desenganche:
P–176 > 100 %: elevación del punto intervenciónP–176 < 100 %: reducción del punto intervención
Operando con alim. no regulada, el valor determ.debe multiplicarse por el factor (Ured 0,002
(da 0,64 para Ured=400V)
)21V
Consigna de flujo Inductancia principal
P–173 Velocidad [r/min]
Xh
Xh2
Xh1(Val. nom.)
100 %
P–173 P–172
P–175 [%]
Velocidad [r/min]
F
Característica de laconsigna de flujo yde la inductanciaprincipal
Módulos de cabezal (HS)2.1 Juegos de parámetros de motores y convertidores
04.97

HS
10.00
HS/2-20 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.1.3 Configuración del sistema con motores estrella/triángulo, 2 mo-tores
Indicación
Si se utilizan motores especiales, las características de dichos motores de-berán acordarse con la sucursal SIEMENS competente.
Inicialización de motores estrella/triángulo, 2 motores
Juego de parámetros de motores
Características para consigna de flujo y de inductancia principal
Conmutación de motor
Para este fin, se tiene que introducir, en la inicialización, en el parámetro P–096el número del motor en estrella (número par) en el margen de 200 a 299.
Los cálculos necesarios se realizan automáticamente con la selección de lafunción de inicialización (P–097=1).
Para cargar dos distintos motores estándar, se tiene que inicializar primero unmotor estándar (número de motor 101 a 429). Estos datos de motor se indicanen el área de parámetros para el motor 1 (estrella) P–158 a P–176.
Después de la inicialización, se tiene que introducir en P–238 el número de mo-tor para el motor 2 (triángulo) e iniciar los cálculos necesarios con P–239 = 1.Estos datos de motor se indican en el área P–219 a P–236 y P–294.
Sinopsis
Inicialización demotores estándaren estrella/triángulo
Inicialización dedos distintos mo-tores estándar
Módulos de cabezal (HS)2.1 Juegos de parámetros de motores y convertidores
10.00

HS
10.00
HS/2-21 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-6 Inicialización de motores estrella/triángulo, 2 motores
Atributos de parámetros
Número Modif. ac-P–051
Margen de ajuste Descripción
Mot. 1 Mot. 2Modif. ac
tivaP–051
g j p
P–095 – tras iniciali-zación
– 6...13 Dec Código de parte de potenciaValor por defecto: 7 (apt. 6.2) a partir de FW 3.00 Valor por defecto: 31)
P–096 – tras iniciali-zación
– 101...429 Dec Código del motorAjuste por defecto: 101 (apt. 6.2)Introducir el código del motor correspondiente a laconfiguración del sistema:
Motor estándar estrella/triánguloIntroducción del código motor par (estrella)
Motor especial estrella/triánguloIntroducción del código del motor par corres-pondiente a un motor estándar (estrella)cuyas características sean las más parecidasal motor especial.
2 motores estándarIntroducción del código correspondiente alprimer motor estándar
2 motores especialesIntroducción del código del motor correspon-diente a un motor estándar cuyas característi-cas sean las más parecidas al primer motorespecial.
P–098 – tras iniciali-zación
– 128...4096 Dec Número de rayas del captador motorValor por defecto: 2048
P–097 – – – 0...1 Hex
Inicialización
Indicación “SEtUP” en el displayLa combinación motor/parte de potencia seleccio-nada se carga en la memoria de datos de máqui-na.
Visualización “P–000” aparece tras inicializaciónterminada con éxito.
– P–238 tras con-versión
10 101...429 Dec Código del motorValor por defecto: 101 (apt. 6.2)Introducción del código del motor para el segundomotor (triángulo) según configuración del sistema.Se procede como para P–096.
– P–239 online 10 0...1 Hex Lanzar cálculo de parám. motor 2 (P–238)
P–052 – online 4 0...1 Hex Carga de parámetros en FEPROM
1) Las partes de potencia con ref. 6SN12–1A0–A1 se reconocen automáticamente a partir de la FW 3.00. En tal caso ya no es posible modificar P–095.
Inicialización demotores estrella/triángulo, 2 moto-res
Módulos de cabezal (HS)2.1 Juegos de parámetros de motores y convertidores
04.97

HS
10.00
HS/2-22 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Para motores especiales es necesario entrar los parámetros de los mismos. Lalista de parámetros figura en el anexo (v. apt. 6.6).
P–158 a P–176 juego de parámetros de motor estrella o motor 1
P–294, P–219 a P–236 juego de parámetros de motor triángulo o motor 2
Tabla 2-7 Juego de parámetros de motor
Atributos de parámetros
Número Modif. ac-P–051
Margen de ajuste Descripción
Mot. 1 Mot. 2Modif. ac
tivaP–051
g j p
P–159a
P–176
P–219a
P–236
tras con-versión
10 v. apt. 6.6 Parámetros para motor 1/motor 2Introducción de los parámetros motor en funciónde la configuración del sistema:
Motor estándar estrella/triángulono es necesaria introducción
Motor especial estrella/triánguloIntroducción de los parámetros para motor estrella(P–159 a P–176) y triángulo (P–219 a P–236)
2 motores estándarno es necesaria introducción
2 motores especialesIntroducción de los parámetros para primer motorespecial (P–159 a P–176) y segundo motor espe-cial (P–219 a P–236)
P–158 P294 online 4 0,000 mH ...65,535 mH
a partir de FW 3.00Los motores de baja dispersión precisan a su en-trada una bobina serie a fin de alisar las intensida-des de fase. Para el convertidor, la bobina serietiene el mismo efecto que una reactancia dispersade estator más elevada, P169/229.Hasta ahora, P169/P229 debían adaptarse amano. P158 y P294 afectan la limitación de de-senganche (pérdida de estabilidad) y los ajustesprevios del regulador de intensidad.
P–177 P–237 online 10 0...1 Hex Lanzar cálculo para motor 1(P–096)/motor 2 (P–238)Se lanzan los cálculos para los parámetros motordefinidos cuando P–180=0.
P–052 – online 4 0...1 Hex Carga de parámetros en FEPROM
Juegosde paráme-tros de motorMotores especia-les
Módulos de cabezal (HS)2.1 Juegos de parámetros de motores y convertidores
04.97

HS
10.00
HS/2-23 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-8 Característica de la consigna de flujo y de la inductancia principal
Atributos de parámetrosM dNúmero Modif. ac-
tivaP–051 Margen de
ajusteDescripción
Mot. 1 Mot. 2tiva ajuste
p
P–172 P–232 tras con-versión
10 10...10000 r/min Velocidad lím. superior característica Xh(característica de la inductancia principal)
P–173 P–233 tras con-versión
10 100...6000 r/min Vel. de paso a debilitamiento de campoMarca inicio de oper. con debilitam. de campo encaract. de const. de flujo y vel. inf. de caracter. Lh
Operando con alim. no regulada, la velocidaddeterminada debe multiplicarse por el factorUred . 0,0021
V(da 0,8 para Ured=400V)
P–175 P–235 tras con-versión
10 100...300 % Ganancia de la característica Lh
100 % = reactancia Lh const. en todo el margen vel.
P–175 =Lh2
Lh1
(para n=P–172)
(para n=P–173). 100 %
P–176 P–236 tras con-versión
10 1...150 %
(da 0,64 para Ured=400V)
El P–176/P–236 se cargan específicamentepara el motor a partir de FW 3.10.
Factor de reducción par de desenganchePto. intervención del límite de par de desenganche:P–176 > 100 %: elevación del punto intervenciónP–176100 %: reducción del punto intervenciónOperando con alim. no regulada, el valor determ.debe multiplicarse por el factor (Ured . 0,002 )21
V
P–178 P–240 – – Parámetro deindicación
Indicación de la velocidad de giro a partir de la cualla potencia nominal se reduce como consecuenciade la limitación del par de vuelco, a partir de FW3.10
Consigna de flujo Inductancia principal
P–173 Velocidad [r/min]
Xh
Xh2
Xh1(Val. nom.)
100 %
P–173 P–172
P–175 [%]
Velocidad [r/min]
Φ
Característica de laconsigna de flujo yde la inductanciaprincipal
Módulos de cabezal (HS)2.1 Juegos de parámetros de motores y convertidores
10.00

HS
10.00
HS/2-24 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-9 Conmutación de motores
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–180 – online 10 0...1 Hex Habilitación conmutación motor (estrella/triángulo)0H: conmutación no posible1H: conmutación habilitadaNota:Para la demanda de conmutación, un borne deentrada programable (E1 a E9) deberá asignarsea la función nº 5 (parametrización, v. apt. 3.2.2)
Conmutación demotores
Módulos de cabezal (HS) 03.962.1 Juegos de parámetros de motores y convertidores

HS
10.00
HS/2-25 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.2 Aplicaciones estándar
2.2.1 Visualización de estado
Los parámetros P–000 y P–100 sirven para indicar el estado momentáneo delsistema convertidor.
Tabla 2-10 Visualización del estado
Display
Grupo funcional
Función relé ModoEstado equipo
convertidorModo Escalón
no ac-tivo
función relé 1programableborne A11P–241nreal = ncons
1)
función relé 2programableborne A21P–242|Md| < Mdx
1)
función relé 3programableborne A31P–243|nreal| < nmín
1)
función relé 4 programableborne A41P–244|nreal| < nx
1)
función relé 5programableborne A51P–245Temp. mot.1)
función relé 6programableborne A61P–246función relé var.(P–186)1)
Señalización Li-sto/Falloborne 672/674P–053Listo
El segmento lucecuando se excita el relé correspon-diente.
Función Oscila-ción seleccio-nada (a partirde fct. 3.00)
accionamiento nodesbloqueado:condición de con-tinuación, v. co-lumna “Estado e.convertidor”
modo regul.de velocidad
modo de regu-lación de par
modo con parregulado y vi-gilancia dedeslizamiento
modo M19
modo posicio-namiento decabezal
Modo eje C
Modo ejeHPC 0,5 msó 0,3 ms
Modo ejeHPC 0,6 msó 0,35 ms
Funcióndiagnósticomodo mando I/f
Actúa ciclorápido reguladorvelocidad
falta desbloqueode impulsos enmódulo NE(B.63/B.48)
falta desbloqueode impulsospara eje (B.663)
falta desbloqueoregul. en móduloNE (B.64) y/odesbloqeuo re-gul. en móduloHS (B.65)
falta desblo-queo genera-dor de rampas(B.81)
falta desblo-queo consigna(borne progra-mable nº función 16)
Indicación del sen-tido de par con mo-tor desbloqueado:
funciona-miento comomotor
funciona-miento comogenerador
Indic. en P–000:(sólo en modo es-trella/triángulo)
estrella seleccio-nada
triángulo se-leccionado
filtro digitalactivo
posición 1seleccionada
posición 2seleccionada
posición 3 se-leccionada
posición 4 se-leccionada
posicionamientoincremental se-leccionado
Indic. en P–100:(sólo en modo posicio-namiento de cabezal)
escalón de re-ducción 1 selec-cionado
escalón de re-ducción 2 se-leccionado
escalón de re-ducción 3 se-leccionado
escalón de re-ducción 4 se-leccionado
Escalón 1...8selección por fun-ción de borne pro-gramableP–081...P–089=9, 10, 11
escalón de re-ducción 5 se-leccionado
escalón de re-ducción 6 se-leccionado
escalón de re-ducción 7 se-leccionado
escalón de re-ducción 8 se-leccionado
1) Estado de fábrica
Módulos de cabezal (HS)04.972.2 Aplicaciones estándar

HS
10.00
HS/2-26 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.2.2 Versión de firmware y variante de módulo
Tabla 2-11 Versión de firmware y variante de módulo
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
(P–099) – – – 0.00...99.00 Versión de firmware
(P–150) – – – – Identificador de módulo
Funciones del conector X432:F00H sin función200H con entrada adicional para
captador de cabezal300H con salida de señales de
generador de impulsos para usoexterno
Módulos de cabezal (HS) 04.972.2 Aplicaciones estándar

HS
10.00
HS/2-27 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.2.3 Parámetros de ajuste para aplicaciones estándar
Valores de velocidad
Valores de límite de par
Vigilancia de la temperatura del motor
Oscilación de cabezal para engrane
Tabla 2-12 Valores de ajuste de velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–022 P–261 online 4 1...nnom r/min Umbral de vel. para bloqueo de impulsosCon bloqueo del regulador y cuando la velocidadbaje de dicho umbral, se anula la corriente de sa-lida del equipo convertidor (parada sin giro sent.opuesto).
P–025 online 4 0...15000 ms Bloqueo de impulsos retardado tras bloqueode regulador FW 3.00La activación del bloqueo de impulsos tras el blo-queo del regulador puede retardarse, a través deP025, después de frenar siguiendo la rampa dedeceleración.
Bloqueo regulador
Retardo P025
n
t
Velocidaddescone-xión P022
Frenado siguiendorampa de deceleración Activación de blo-
queo de impulsos
P–029 P–264 online 4 0...nmáxmot r/min Limitación de velocidadAjuste de la velocidad máxima del motor
P–036 – online 4 – 400...400 Dec
Corrección de error de fase del captadorSi las dos pistas del captador no están decaladasexactamente 90 esto ocasiona una ondulación depar. Finura de ajuste 1 corresponde a 0,18 Valor máx. 400 corresponde a 72
P–037 P–267 online 4 1...32000 r/min Vel. conmut. evaluación captador motorPor encima de esta velocidad se desactiva la eva-luación fina del valor real de velocidad.(no significativo a partir de firmware V2.00)
P–038 P–268 online 4 1...500 r/minHistéresis P–037/P–267(no significativo a partir de firmware V2.00)
Sinopsis
Valores de ajustede velocidad
Módulos de cabezal (HS)04.972.2 Aplicaciones estándar2.2 Aplicaciones estándar

HS
10.00
HS/2-28 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-13 Límites de par
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–039.1 P–269.1 online 4 5...300 % 1º límite de par(referido al par nominal del motor)
P–041 P–271 online 4 5...100 % 2º límite de par referido a P–039/P–269Se activa por el borne 1 y en caso de superarse lavelocidad ajustada en P–050/P–290.
P–050 P–290 online 4 0...nmáxmot r/min Velocidad de conmutación de Md1 a Md2
P–040.1 P–270.1 online 4 5...100 % Límitación de operación en generador(referida a P–039/P–269 ó P–041/P–271)
P–042 P–272 online 4 1...nmáxmot r/min Velocidad de conmutación para P–040/P–270
P–043 P–273 online 4 0...nmáxmot r/min Histéresis P–042/P–272
Par [%]
Operación en motorP–039.1
P–041
P–040.1
P–039.1
P–042
P–050
Velocidad [r/min]Operación en ge-nerador
Límite de par máx. ajustable: I2máxUmr – I02 Mot
I2nomMot – I02 Mot
ImáxUmr – Intensidad máxima del equipo convertidorI0 Mot – Intensidad en vacío del motorInomMot – Intensidad nominal del motor
100 %
(referido al par motor nominal)
(para una sobrecarga de 10 s)
Limites de par
Módulos de cabezal (HS)2.2 Aplicaciones estándar

HS
10.00
HS/2-29 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-14 Vigilancia de la temperatura del motor
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–063 P–291 online 4 0...170 C Temperatura máxima de motorsu rebasamiento provoca tras aprox. 1 s:relé “Alarma sobrecalentamiento motor”Temporización P–065:Bloqueo de impulsos y aviso de fallo F–14
P–064 – online 4 0...170 C Temperatura fijaSi se ajusta un valor 0, los parámetros del mo-tor se calculan con esta temperatura¡Atención! Se desactiva la vigilancia de la
temperatura del motor.
P–065 – online 4 0...600 s Temp. vigilancia temperatura motor
Tabla 2-15 Oscilación de cabezal para engrane
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–154 – online 4 –nmáxMot...nmáxmot r/min
Consigna de oscilación 1
P–155 – online 4 –nmáxMot...nmáxMot r/min
Consigna de oscilación 2
P–156 – online 4 10...10000 ms Intervalo de oscilación 1
P–157 – online 410...10000 ms
0...10000 ms a par-tir de FW 3.00
Intervalo de oscilación 2Si se ajusta 0, sólo actúa el valor en P154, apartir de FW 3.00
Velocidad [r/min]
Tiempo [ms]
P–154
P–155
P–156 P–157
Vigilancia de latemperatura delmotor
Oscilación de ca-bezal para engrane
Módulos de cabezal (HS)04.972.2 Aplicaciones estándar

HS
10.00
HS/2-30 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3 Otras aplicaciones
2.3.1 Parada orientada del cabezal (vía función auxiliar M19 del CN)
La función M19 puede activarse por intermedio de un borne programable(E1 a E9); v. apt. 3.2.2.
Tabla 2-16 Parada orientada del cabezal (vía función auxiliar M19 del CN)
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–054 – online 4 –nmáxmot...nmáxmot r/min
M19 Normalización consigna de velocidadVelocidad alcanzada para la tensión de entradaanalógica definida en P–024+ = giro horario para consigna de vel. positiva– = giro antihorario para consigna de vel. negativa
P–055 – online 4 C000...4000 Hex M19 Corrección de offsetp.ej. valor de corrección positivo 2FH
valor de corrección negativo FF00H
P–056 – online 4 0...nmáxmot r/min M19 Velocidad de conmutaciónVelocidad de conmutación de los factores de nor-malización de la consigna. Por debajo de dichavelocidad, se activan los parámetros P–054 yP–055.
P–058 – online 4 0...nmáxmot r/min M19 Umbral de desactivación de redondeoPor debajo de la velocidad ajustada, se desacti-van el alisamiento de la consigna de velocidad y elredondeo. La reactivación sólo puede realizarseanulando el modo M19. FW 2.00
P–062 – online 4 0...nmáxmot r/min M19 Umbral conmut. acción I reg. velocidadUmbral de velocidad para activación del tiempo deacción integral del regulador de velocidad. Cuandola velocidad baja del valor parametrizado enP–062, se activa de nuevo la acción I.
P–090 – online 10 0...FFFF Hex Palabra de mandoActivación de P–062 por puesta a 1 del bit 4 enP–090 (corresponde a 10H).
Módulos de cabezal (HS) 10.942.3 Otras aplicaciones

HS
10.00
HS/2-31 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3.2 Eje C
La activación del modo eje C puede efectuarse por intermedio de un borne pro-gramable (E1 a E9); v. apt. 3.2.2. La consigna sólo puede transmitirse a travésde los bornes 24 y 8.
Tabla 2-17 Eje C
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–114.1 – online 4 –nnom–1...nnom–1r/min
Normalización consigna velocidad eje CVelocidad alcanzada para la tensión de entradaanalógica definida en P–024.+ = giro horario para consigna de velocidad posit.– = giro antihorario para consigna de vel. negativa
P–115.1 – online 4 C000...4000 Hex Corrección de offset para P–114Valor de corrección máx. 2000 ó E000 corres-ponde aprox. a 1/8 de P–114, cuandoP–024 = 10,0
2.3.3 Posicionamiento del cabezal
Descripción de la función
Consignas de posición
Parámetros de función 1
Regulador de posición
Parámetros de mando
Parámetros de función 2
Parámetros de diagnóstico
Puesta en marcha abreviada
El cabezal se posiciona en el sentido de giro normal o con inversión del sentidode giro, sin intervención del lazo de regulación de posición del controlnumérico.
Sinopsis
Descripción de lafunción
Módulos de cabezal (HS)10.942.3 Otras aplicaciones

HS
10.00
HS/2-32 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Están previstos diferentes sistemas de captación de la posición:
con captador del motor (pistas sen/cos) sin relación de transmisión (todoslos parámetros están prefijados para este caso)
con captador de posición (pistas sen/cos) y dispositivo emisor de marca 0 uorigen (BERO) montado en el cabezal en caso de conmutación de escalo-nes de reducción
con captador incremental en cabezal (máx. 8192 rayas por vuelta), sólo enla variante con entrada para captador de cabezal(6SN11–BA12–0A0)
Las señales del captador de cabezal se utilizan y procesan siempre conforma de onda rectangular inclusive multiplicación de impulsos.
Precaución
En unidades de regulación de cabezal con salida de señales de emisor deimpulsos para uso externo (ref. MLFB 6SN11–BA13–0A0) no deberáconectarse ningún captador de cabezal. De no observarse esta advertenciapueden dañarse el equipo y el captador del cabezal.
La configuración hardware debe definirse vía P–141.
La función de borne programable “posicionamiento on” (nº función 28) deberáasignarse a través de los parámetros P–081 a P–089 a uno de los bornes pro-gramables E1 a E9 (v. apt. 3.2.2). El posicionamiento se inicia aplicando la ten-sión de desbloqueo en el borne seleccionado.
La operación de posicionamiento puede dividirse en diferentes fases:
Frenado del accionamiento
Partiendo de una velocidad cualquiera, el accionamiento frena hasta llegara la velocidad de búsqueda siguiendo la curva especificada por el genera-dor de rampas de aceleración/deceleración. El controlador de posiciona-miento suministra para ello la consigna de velocidad necesaria; en estecaso se inhibe la consigna de velocidad eventualmente aplicada en elB. 56.
Se denomina velocidad de búsqueda a la mayor velocidad desde la que elaccionamiento puede frenar en una vuelta hasta la posición de consigna sinrebasar ésta. Por arriba, la velocidad de búsqueda queda limitada por lacapacidad de frenado del accionamiento y por el momento de inercia de lacarga.
Reconocimiento de la posición
Una vez alcanzada la velocidad de búsqueda y detectada la marca de 0 uorigen se activa el regulador de posición.
Módulos de cabezal (HS)2.3 Otras aplicaciones
12.94

HS
10.00
HS/2-33 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Aproximación a la posición
La última vuelta antes de la pos. de consigna se descompone en tres fases.
Segmento 2
P–137 ó 138
Segmento
1 P–136
P–135
3
3605 última vuelta
Fase 1
2
Velocidad (r/min)
Vel. de búsquedaP–146 Posición de consigna
reconocida
Angulo(grados)
05
P–134
Curva de frenadoP–139
Figura 2-1 Aproximación a la posición
Los puntos de inicio y las pendientes de las diferentes porciones de la curvapueden ajustarse para obtener el tipo de aproximación deseado (P–134 aP–139).
Si, antes de iniciar el proceso de pos., el cabezal gira a una velocidad infe-rior a la velocidad de búsqueda, puede acelerarse hasta la velocidad debúsqueda para reducir la duración del posicionamiento (P–142).
En la mayoría de los casos, basta con adaptar la velocidad de búsquedaP–146 al igual que los parámetros P–137 ó P–138.
Formato de la consigna
La consigna de posición sólo puede adoptar valores comprendidos entre0 y máx. +32767, a partir de la versión de firmware V2.00 como máximo64000 impulsos/vuelta (corresponde al número de impulsos del captadorentre 2 impulsos de origen). El sentido de giro está determinado por el signode la velocidad de búsqueda. Las consignas de posición se definen ennúmero de impulsos o rayas del captador.
Para el posicionamiento con captador de motor, P–141 permite especificarun valor de multiplicación a fin de mejorar la resolución del valor de con-signa. Los valores posibles son 1, 2, 4, 8, 16 y 32. El factor de multiplicaciónpuede eligirse tan grande para que resulte un número calculado de impul-sos de hasta 32768.
Ejemplo:
Captador estándar RON350 (2048 imp/vuelta). Si se utiliza el factor de mul-tiplicación 16, se obtiene un número de imp/vuelta calculado de 32768. Estevalor se registra en P–131. Es posible transmitir consignas de 0 a 32768, apartir de la versión de firmware V2.00, como máximo 64000 imp/vuelta. Sise registran valores más grandes, durante el posicionamiento se señaliza elaviso de fallo FP–01.
Módulos de cabezal (HS)2.3 Otras aplicaciones
10.94

HS
10.00
HS/2-34 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Prescripción de la consigna de posición
Es posible definir 4 consignas internas de posición para cada escalón dereductor (P–121 a P–122 y P–124 a P–125).
Función deborne 23
Función deborne 27
Consigna de posi-ción
Parámetro
0101
0011
1234
P–121P–122P–124P–125
Una vez alcanzada la consigna de posición, las funciones de borne 23 y 27permiten seleccionar otra consigna. Los cambios de nivel de las señalesaplicadas en estos dos bornes deben tener lugar en el espacio de 20 mspara poder considerarlas como simultáneas.
La selección de una nueva posición por intermedio de un borne de escalónde reducción sólo se ejecuta el estado “en posición” cuando en el borneasignado a la función 28 (Posicionamiento “on”) aparezca un flanco ascen-dente. Contrariamente a las funciones de bornes 23 y 27, esto causa siem-pre el paso por el origen.
Consigna incremental de posición
El parámetro P–123 permite prescribir una consigna incremental de posi-ción para cada escalón de reducción. Si el cabezal está parado y un flancoascendente aparece en el borne programable asignado a la función 22, laconsigna incremental de posición se suma a la posición actual y el acciona-miento se desplaza a la nueva posición así calculada. Este proceso puederepetirse una vez alcanzada la nueva posición.
Contrariamente a P–121, P–122, P–124 y P–125, el parámetro P–123acepta también valores negativos.
Decalaje de marca 0 u origen
Los parámetros P–129/P–130 permiten decalar la marca 0 u origen.
Posibilidad de ajuste:
Seleccionar mando de posicionamiento (P–149 = 1H)Dar órdenes de bloqueo de regulador y de impulsos.Girar el cabezal una vuelta completa y llevarlo luego a la posición deseada(control con ayuda de P–140 = de posición real). Ajustar P–129 a 1H y es-perar a que el parámetro vuelva por sí mismo a 0H. La posición así aju-stada se considera como el nuevo origen. La diferencia con relación al ori-gen real se visualiza con ayuda de P–130. Si ahora se prescribe 0H comoconsigna de posición, el cabezal se desplaza a la posición memorizada enP–130.
Señalizaciones por relé
Las funciones de relé 9 y 10 (v. apt. 3.3.2) están disponibles para la señali-zación por relé “posición alcanzada.” Las tolerancias correspondientes seajustan con ayuda de los parámetros P–144 y P–145.
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-35 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Resincronización de cabezal (marca 0 u origen)
Si la marca 0 u origen es suministrada por un detector BERO, el estado delcaptador de posición del cabezal se resincroniza tras cada cambio deescalón en el reductor o caja. Esta resincronización puede inhibirse o acti-varse voluntariamente por intermedio de los bornes programables.
Ajustes posibles:
Poniendo a “1” el bit 1 del parámetro P–149 es posible inhibir la resincroni-zación del cabezal. Un cambio de estado de señal en el borne programableasignado a la función de borne “escalón bit 0 a bit 2” lo interpreta entoncesel regulador de posición como conmutación de parámetros. Los cambiosreales de escalón de reducción (cajas de cambios mecánicas) deberán ent-onces comunicarse al regulador de posición por medio de la función deborne 29 en caso de posicionamiento con captador de motor y marca 0 uorigen externa.
La función de borne 29 tiene remanencia. El nivel High debe estar presentecomo mínimo 20 ms.
Tabla 2-18 Consignas de posición
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–121 – online 4 0...64000 Dec Consigna de posición 1El valor se introduce en forma de número de rayasdel captador (valor máx. posible = incrementos por vuelta)
P–122 – online 4 0...64000 Dec Consigna de posición 2
P–123 – online 4 –32768...32767Dec
Consigna de posición incrementalEl valor se introduce en forma de número de rayasdel captador (valor máx. posible = incrementos por vuelta)
P–124 – online 4 0...64000 Dec Consigna de posición 3
P–125 – online 4 0...64000 Dec Consigna de posición 4
Consignas de po-sición
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-36 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-19 Parámetros de función 1
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–126 – online 4 0,0...180 grados Margen desbloqueo integrador reg. de n Para mejorar la proximación a una posición puedeser ventajoso desactivar el integrador del regula-dor de velocidad. En la zona de destino, la inhibi-ción del integrador (acción I = 0) se anula denuevo. Este parámetro permite definir el ancho delmargen de desbloqueo alrededor del punto dedestino.
P–149 – online 4 0...FFFF Hex Parám. P en M en modo ejeC/posiciónEl desbloqueo de la función “Bloqueo integrador”se efectua activando el bit 5 (20H) vía P–149.
P–129 – online 4 0...1 Hex Definición de marca 0 o origen interno Activando el bit 0 (1H), el decalaje del origen seescribe en P–130 en calidad de marca 0 u origenhardware (valor actual del contador de posición).
P–130 – online 4 0...64000 Dec Decalaje de la marca 0 o origenIntroducción de la distancia a la marca 0 hardware
P–131 – online 4 128...64000 Dec Nº máx de rayas entre 2 marcas 0En este parámetro se introducirá el número demarcas para una vuelta del cabezal.Si se utiliza un captador de cabezal (señales rec-tangulares) es necesario tener en cuenta la multi-plicación.Si el posicionamiento se efectua con caja de cam-bio y BERO, P–133 permite leer la diferencia entredos marcas 0 de BERO sucesivos. P–133 da losresultados más precisos en el margen de veloci-dad de 100 a 500 r/min. Una lectura con el cabe-zal parado da valores erróneos.
Parámetros de función 1
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-37 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-20 Regulador de posición
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–134 – online 4 0,0...180,0 grados Punto de intervención P–136
P–135 – online 4 0,0...180,0 grados Punto de intervención P–137/P–138
P–136 – online 4 0...FFFF Hex Ganancia P del segmento 1
P–137 – online 4 0...FFFF Hex Ganancia P del segmento 2Valor de ganancia para el posicionamiento concaptador de cabezal
P–138 – online 4 0...FFFF Hex Ganancia P del segmento 2 (HMS)Valor de ganancia para el posicionamiento concaptador de motor.
P–139 – online 4 0...FFFF Hex Multiplicador para parábola de frenadoFactor de modificación de la pendiente de la curvade frenado, v. fig. 2-1.
Regulador de posición
Módulos de cabezal (HS)2.3 Otras aplicaciones
10.94

HS
10.00
HS/2-38 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-21 Parámetros de mando
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–141 – online víaP 143
4 0...FFFF Hex Parám. de conmutación P. posicionamientoP–143
Bit Valor
0
0000H
0001H
Evaluación de las señales delcaptador motor (evaluación HSM)Evaluación de las señales delcaptador de cabezalNota: X432 debe estar configu-rado como entrada de captadorde cabezal. Sólo posible en va-riantes de unidad6SN1121–0BA12–0AA0 (siem-pre) y 6SN1121–0BA1–0AA1(ajustando P033=0). De lo contra-rio se activa el aviso de falloF–10. Las señales de captadoresde cabezal se evaluan siemprecomo señales rectangulares conmultiplicación de impulsos.
10000H0002H
Impulso cero del captadorimpulso cero externo (p.ej.BERO)
2
0000H
0004H
Orden de fases del captador decabezal no invertidoInversión del orden de fases delcaptador de cabezal (inv. v. real)
80100H Factor multiplicador 2 de la consi-
gna para posicionamiento concaptador motor y marca 0 interna.
90200H Factor multiplicador 4 de la consi-
gna para posicionamiento concaptador motor y marca 0 interna.
100400H Factor multiplicador 8 de la consi-
gna para posicionamiento concaptador motor y marca 0 interna.
110800H Factor multiplicador 16 de la con-
signa para posicionamiento concaptador motor y marca 0 interna.
121000H Factor multiplicador 32 de la con-
signa para posicionamiento concaptador motor y marca 0 interna.
A observar:Tras modificar el factor multiplicador de la consi-gna (bits 8 a 12) es necesario, antes de validar,modificar mediante P–143 el número de rayas enP–131.Los ajustes modificados deberán activarse víaP–143.Conmutando el parámetro P–143 de 0 a 1 se va-lida y activa el ajuste del parámetro P–141.
Parámetros demando
Módulos de cabezal (HS)2.3 Otras aplicaciones
04.97

HS
10.00
HS/2-39 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-21 Parámetros de mando
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–142 – online 4 0...21 Hex Marcas para elevación de velocidad
Bit Valor
0
0000H
0001H
Si el posicionamiento se efectua apartir de una velocidad inferior ala de búsqueda, inicialmente seproduce una aceleración a la ve-locidad de búsqueda y sólo enton-ces la aproximación a la posición(posicionamiento más rápido).No se produce aceleración a lavelocidad de búsqueda y la apro-ximación a la posición se efectuaa partir de la velocidad mo-mentánea.
5
0000H
0020H
Vigilancia de marca 0 (falloFP–02) activada. En posiciona-miento con BERO, la marca 0 seevalúa en cada posicionamiento.En los otros casos, solamentetras un cambio de escalón de re-ducción. La vigilancia de marca 0tras cambio de escalón se desac-tiva poniendo a 1 el bit 0 deP–142.Inhibición de la vigilancia demarca 0 (fallo FP–02).
P–143 – online 4 0...1 Hex Parámetro de validación P–141Los parámetros modificados en P–141 se validancuando P–143 = 1. Este parámetro se repone au-tomáticamente a 0.
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-40 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-22 Parámetros de función 2
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–144 – online 4 0,00..18,00 grados Margen de tolerancia relé 1Valor para la señalización por relé de “En posi-ción 1” Señalización por relé (v. apt. 3.3.2)
P–145 – online 4 0,00..18,00 grados Margen de tolerancia relé 2
P–146 – online 4 0...4 nnom Velocidad de búsquedaVelocidad a la que comienza la operación de apro-ximación a una posición.
P–148 – online 4 0,0...180,0 grados Ventana de desplazamiento mov. cabezalSi, estando bloqueados los impulsos en modo po-sicionamiento, el cabezal se retira de su posición,entonces retornará a la posición de consigna porel camino más corto tras el desbloqueo de impul-sos. Si está activado el bit 3 en P–149, esto sóloacontece si el cabezal no ha abandonado la ven-tana de desplazamiento (P–148) y el borne defunción nº 28 sigue a nivel high.
Parámetros de función 2
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-41 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-22 Parámetros de función 2
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–149 – online 4 0...FFFF Hex Parám. de P en M modo eje C/posición.
Bit Valor
0
0000H
0001H
Posicionamiento inhibido; no setrata el mando de posicionamiento,es decir, no es posible posicionar y¡el valor real de posición eventual-mente visualizado no es exacto!Se ejecuta el mando de posiciona-miento, y el posicionamiento es po-sible.
1
0000H
0002H
Al llegar una orden de posiciona-miento (borne de función 28 enhigh), se produce una resincroniza-ción del cabezal si anteriormente seha producido un cambio de estadode señal en uno de los bornes pro-gramables asignados a la función“Escalón bit 0 a bit 2”.Sólo se produce resincronizacióndel cabezal si antes de la orden deposicionamiento ha estado aplicadoun flanco ascendente en un borneasignado a la función 29.
2
0000H
0004H
Ya no se produce la transformaciónespejo de las consignas de posi-ción.Transformación espejo de las con-signas de posición absolutas.
3
0000H
0008H
La aproximación a la posición seefectúa en el sentido de giro mo-mentáneo.La aproximación a la posición seefectúa siempre en el mismo sen-tido de rotación; éste está definidopor el signo de la velocidad debúsqueda (excepción, v. P–148).
5
0000H
0020H
La acción I del regulador de veloci-dad está activada.La acción I del regulador de veloci-dad está desactivada. Esta se reac-tiva en la zona de destino (ajustablepor P–126).
60040H Reducción de oscilaciones tras el
frenado a la veloc. de búsquedaFW 2.00
7
0000H
0080H
El redondeo de la cons. de veloci-dad (P–019) actúa también duranteuna operación de posicionamiento.El redondeo de la cons. de veloci-dad (P–019) se desactiva tanpronto llega la orden de posiciona-mientoEl redondeo de la cons. de veloc.(P–018) nunca actúa durante unaoperación de posicionamiento conindependencia de P–149.
Módulos de cabezal (HS)2.3 Otras aplicaciones
03.96

HS
10.00
HS/2-42 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-23 Parámetros de diagnóstico
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
(P–100) – – – – Visualización de estado P–100(v. apt. 2.2.1)
(P–128) – – – – Consigna de posición actual P–128 visualiza la consigna de posición actual,expresada en número de rayas. El valor sólo seactualiza teras el desbloqueo del software de posi-cionamiento vía P–149 = 1.
(P–132) – – – – Valor real absoluto sin decalaje marca 0
(P–133) – – – – Diferencia entre dos marcas 0 externasIndicación de la diferencia entre dos marcas 0 uorigen consecutivos provenientes de detectoresBERO (P–141 = 2).
(P–140) – – – – Valor real absoluto conn decalaje marca 0
(P–147) – – – – Estado del contador de posición para BEROIndicación del contenido del contador de posicióndurante un posicionamiento con detector BERO.
(P–320) – – – – Diagnóstico de marca zero (origen) captadormotor
(P–321) – – – – Diagnóstico de marca zero (origen) captadorcabezal
Parámetros dediagnóstico
Módulos de cabezal (HS)2.3 Otras aplicaciones
04.97

HS
10.00
HS/2-43 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Ejemplo de puesta en marchaConfiguración hardware: Señales de captador y marca 0 u origen suministradospor el captador del motor
Introducir la configuración hardware con ayuda de P–1410 = impulsos del captador incorporado en el motorAjustar P–141 a 0H (preajustado); si se modifica P–141, la modificación debe validarse mediante P–143 = 1.
1. Bloquear los impulsos y reguladores.
2. Girar el cabezal una vuelta completa y después llevarlo aposición deseada (control con ayuda de P–140 = posiciónreal).
Ajustar P–129 a 1H; cuando la indicación retorne a 0H, la posición del cabezal queda definidacomo marca 0 ó origen software.El parámetro P–130 indica el decalaje entre la marca 0 interna y la marca 0 hardware.
1. Desbloquear el accionamiento(Bornes 663, 65, 81)
2. Transmitir la consigna de velocidadpara hacer que el cabezal gire al menosuna vuelta y luego detenerlo en la posi-ción deseada.
3. Cortar tensión en bornes 65 y 663.
1. Desbloquea el accionamiento (Bornes 663, 65, 81) 2. Transmitir una consigna de velocidad
Efectuar un ensayo:
3. Seleccionar el borne programable (E1 a E9) asignado a la función nº 28 de posicionamientoEl motor frena a la velocidad de búsqueda y después se detiene en la posición de consi-gna prescrita (la consigna y el valor real de posición pueden controlarse con ayuda delos parámetros P–128 y P–140).
Ajustar P–149 a 1H para activar el programa de posicionamiento.
Introducir el número de impulsos (rayas) entre dos marcas 0 en P–131
¿Es posibleajustar la posicióngirando a mano el
cabezal?
No
Sí
¿Posición deseadaalcanzada?
No
Sí
Modificar la consigna conayuda de P–121
Optimizar el posicionamiento con ayuda de los parámetros P–134 a P–139.La velocidad de búsqueda puede modificarse con ayuda de P–146. Los parámetros P–142 yP–149 permiten seleccionar las funciones suplementarias (v. descripción de parámetros,tablas 2-21 y 2-22). El margen de tolerancia para las dos señalizaciones por relé puedeajustarse con P–144 y P–145.
Almacenar los parámetros modificados en FEPROM (P–052).
Fin
Puesta en marchaabreviada
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-44 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3.4 Modo mando de par (configuración maestro/esclavo)
Descripción de la función
Ajuste de parámetros
Descripción de los parámetros
Vigilancia del deslizamiento
El modo mando de par es necesario cuando se utiliza el regulador de velocidaddel CN o también para el accionamiento esclavo en una configuración de accio-namientos maestro/esclavo. El modo mando de par puede activarse por uno delos bornes E1 a E9 (v. apt. 3.2.2). En un accionamiento maestro/esclavo (2 ac-cionamientos de cabezal acoplados de forma rígida), la consigna de par debetransmitirse desde el accionamiento maestro a través de una salida CDA (DAU)(adaptación de P–066 ó P–068, v. apt. 3.3.5) al accionamiento esclavo (adapta-ción P–048, P–049).
Precaución
Si se anula el acoplamiento rígido, el accionamiento esclavo deberá conmu-tarse a “regulación de velocidad”, de lo contrario el accionamiento acelera a lavelocidad máxima incluso si la consigna de par se prescribe a 0.
Consigna veloci-dad para acc. esc-lavo en mando depar con vigilanciade deslizamiento
Consigna velocidad
Accionamiento maestro
Salida CD/A asignación vía P–066/068
Acc. esclavo M3 ~
B. A9n
B.56/14
Adapt. Mdconspor P–048/049
Acoplamientorígido o cuasirígido soltable en servicio.
M3 ~
B.56/14
Borne prog.Mando de par (Fcn. nº 4)
Accionamiento esclavo:acoplado :“mando de par”desacoplado: “regulación de velocidad”
Consigna ve-locidad
Consigna de par
B. En
B.24/8
B. En
Borne prog. Mando depar con vigil. de desli-zamiento (Fcn. nº 32)FW 2.00
o
Figura 2-2 Configuración accionamiento maestro/esclavo
Sinopsis
Descripción de lafunción
Módulos de cabezal (HS)2.3 Otras aplicaciones
03.96

HS
10.00
HS/2-45 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
En caso de bloqueo del regulador en modo mando de par, el frenado debeefectuarse adoptando una consigna Md; la orden interna de supresión de im-pulsos sólo se da cuando la velocidad ha alcanzado el umbral de corte (desco-nexión) (P–022).
Ejemplo:
A fin de obtener en los bornes A92 y M del accionamiento maestro la consignade par, la dirección 0C6CH debe escribirse en un parámetro P–068. Definiendoel factor de decalaje en el parámetro P–069 es posible fijar la tensión corres-pondiente a un cierto par.
La normalización del par nominal del motor debe tomarse de la dirección0F52H en el parámetro P–250; en P–251 puede leerse el valor de normaliza-ción para el par nominal.
ContenidoP–251 (Hex)
Factor de de-calaje P–069
Valor a convertir(Hex)
Tensión de salidaCDA2 [V] para Mdnom
0C00
0123
0C00180030006000
0,941,883,757,50
1000012
100020004000
1,252,505,00
A la tensión de salida máxima, es necesario tener en cuenta el límite de parque figura en P–039 (160 % = Mdnom . 1,6) y es necesario asegurarse de queno se produzca rebase (> 10 V).
Si el accionamiento esclavo está conmutado a regulación de par, los paráme-tros P–048 y P–049 permanecen aún activos. P–048 permite adaptar el par (deforma análoga a P–014 en regulación de velocidad); P–049 sirve para compen-sar la deriva de par (función análoga a P–015 en regulación de velocidad). Elparámetro P–049 no es adecuado para la compensación de fuerzas de roza-miento. P–048 y P–049 carecen de efecto en regulación de velocidad.
A partir de la versión de firmware 3.00El par definido se actualiza cada 1 ms (anteriormente, 20 ms) a través de ladirección 304C y está normalizado con la relación 5 V par nominal del motor.
Ejemplo:Salida a través de los bornes A92 y MP68=304CH P69=0HCon P26 puede modificarse la normalización.Con P26=100%, 5 V corresponden al par nominal.Con P26=160%, 8 V corresponden al par nominal.
Ajuste de paráme-tros
Módulos de cabezal (HS)2.3 Otras aplicaciones
04.97

HS
10.00
HS/2-46 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-24 Descripción de parámetros
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–048 – online 4 –250...250 % Normalización MdconsEl valor de ajuste está referido al par nominal delmotor.
P–049 – online 4 C000...4000 Hex Offset de la consigna de par
El acoplamiento mecánico de accionamientos por transmisión por adherenciapuede ocasionar un deslizamiento a nivel del accionamiento esclavo que fun-ciona con mando de par.
En esta función, el accionamiento esclavo vigila la diferencia entre el valor realde velocidad y su valor de consigna, y reduce el par en caso de rebase de latolerancia de velocidad.
Asignación de canales de consigna de velocidad:
Accionamiento maestro, B.56/14
Accionamiento esclavo, B.24/8
El mando de par con vigilancia del deslizamiento puede activarse por medio delborne programable asignado a la función nº 32 (v. fig. 2-2).
Descripción deparámetros
Mando de par convigilancia de desli-zamientoFW 2.00
Módulos de cabezal (HS)2.3 Otras aplicaciones
03.96

HS
10.00
HS/2-47 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-25 Vigilancia de deslizamiento
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–340 – online 4 0,1...100,0 % Desviación de velocidad vigil. deslizamientoDesviación de velocidad admisible con relación ala consigna de velocidad actual.
P–346 – online 4 0,0...100,0 % Histéresis para P–340
P–341 – online 4 0,0...100,0 % Reducción de par vigilancia deslizamientoValor de reducción de la consigna de par en casode superación de la desviación de velocidad para-metrizada en P–340.
P–343 – online 4 0...999 ms Temporización vigilancia deslizamientoTemporización que transcurre hasta la anulaciónde la reducción de par.
P–344 – online 4 0,01...100,00 %/ms Velocidad reduc. par vigilancia deslizamientoVelocidad con la que se reduce la consigna depar.
P–345 – online 4 0,01...100,00 %/ms Vel. aument. par vigilancia deslizamientoVelocidad con la que se aumenta la consigna depar.
(P–347) – online – – Desviación vel. actual vig. deslizamientoSi el valor indicado es superior al umbral ajustadoen P–340, entonces se produce deslizamiento, loque puede activar la vigilancia.
nreal
ncons
P–346
P–340 ncons
(P–347) =nreal – ncons
ncons
100 %
P–345
P–344
Factor de re-ducción paraMdcons
100 %
P–341
P–343t
Módulos de cabezal (HS)2.3 Otras aplicaciones
12.94

HS
10.00
HS/2-48 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3.5 Función monitor
Los parámetros P–249 a P–251 permiten leer los contenidos de las direcciones(datos en área RAM) del módulo de cabezal.
Indicación
En el anexo (apt. 6.5) figura una lista de las principales magnitudes de medida(variables en RAM) con sus direcciones.
Tabla 2-26 Función monitor
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–249 – online 10 0...FFFF Hex Segmento célula memeoria monitorSelección de la dirección de segmento
P–250 – online 10 0...FFFF Hex Dirección célula memoria monitorSelección de la dirección de offset
P–251 – online – – Vis. valor célula memoria monitorIndicación del contenido de la direcciónP–249/P–250
2.3.6 Eje HPC (FW 2.00)
En modo eje HPC (eje C con alta precisión), sólo los bornes programables E1 aE6 pueden ocuparse con funciones.
Descripción de la función
Configuración del sistema
Interfases del convertidor
Optimización del regulador
Diagnóstico
El modo eje HPC procura un mejor comportamiento frente a cambios de cargay de consigna; para ello se reduce el período de muestreo del regulador develocidad a 0,5 ó 0,6 ms. Disponibile a partir de 3.00 0,3 ó 0,35 ms.
Funcionalidades ampliadas en modo eje HPC:
– Adaptación de flujo (reducción de ruido)
– Parametrización de 2 filtros digitales en el canal de consigna de par paraun período de muestreo del regulador de velocidad de 0,6 ms (Disponi-bile a partir de 3.00 0,3 ó 0,35 ms).
Sinopsis
Descripción de lafunción
Módulos de cabezal (HS)2.3 Otras aplicaciones
04.97

HS
10.00
HS/2-49 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
En el modo eje HPC no están disponibles las funciones siguientes:
– Alisamiento de consigna de par
– Oscilación de cabezal para engrane
– Función auxiliar de CN M19
– 2º límite de par
– Generador de rampas
– Adaptación del regulador de velocidad
– Conmutación de escalones de reducción
– Posicionamiento del cabezal
– Funciones restringidas de bornes y relés
– Alisamiento convertidor D/A (CDA) para indicación de P/Pmáx
Prerrequisitos para modo eje HPC:
– Margen de velocidad: nnommotor
– Sólo seleccionable motor 1 (estrella)
– Eje HPC tiene preferencia sobre eje C normal
– La conmutación al modo normal se efectúa de forma online; tras ellaestán de nuevo disponibles todas las funciones.
Selección eje HPC
Tabla 2-27 Selección eje HPC
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–149 – online 4 0...FFFF Hex Parámetro P en M eje C/posición.
Bit Valor
80000H0100H
Eje HPC no seleccionableEje HPC seleccionable
Selección del modo eje HPC vía función nº 30 enborne programable
Límites de par
Tabla 2-28 Límites de par
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–109 – online 4 5...180 % Límite de par HPCSe ajusta el par máx. permitido referido al par no-minal del motor.
P–110 – online 4 5...100 % Limitación en generador, modo HPCLimitación del par en generador referido a P–109.
Configuración delsistema
Módulos de cabezal (HS)2.3 Otras aplicaciones
03.96

HS
10.00
HS/2-50 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Consigna analógica
La consigna de velocidad analógica o la consigna Md sólo puede definirsea través del canal de consigna 2 (B.24/8).
La consigna de velocidad está limitada a nnommotor.
Tabla 2-29 Consigna analógica de velocidad
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–093 – online 4 C000...4000 Hex Correc. offset consigna de velocidad HPCCorrección de deriva para la entrada de consignaanalógica
P–094 – online 4 –nnom–1...+nnom–1 r/min
Normalización consigna de velocidad HPCP–094 permite ajustar la velocidad a alcanzarcuando se aplique la tensión analógica de entradadefinida en P–024.
Funciones de bornes de asignación fija
En el modo eje HPC están también disponibles los bornes 663, 65 y 81.
Funciones de bornes programables
Sólo se evalúan los bornes de entrada E1 a E6 (P–081 a P–086).
Están disponibles las funciones de bornes siguientes (v. apt. 3.2.2)
Tabla 2-30 Funciones de bornes
Funciones de bornes Función nº
Borrar memoria de fallos (reset)(acuse de fallo)
3
Modo mando de par 4
Bloqueo integrador regulador de n 8
Alisamiento consigna de velocidad 25
Inhibición de F–11 (marcha a tope fijo) 26
Eje HPC 30
Frecuencia de pulsación de ondulador 3334
Interfases del con-vertidor
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-51 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Funciones de relé de asignación fija
En el modo eje HPC están también disponibles los bornes 672/673/674.
Funciones de relé programables
Cuando se conmuta al modo eje HPC se congelan los estados de las fun-ciones de relé no disponibles.
Están disponibles las siguientes funciones de relé (v. apt. 3.3.2):
Tabla 2-31 Funciones de relés
Función de relés Función nº
nreal < nmín 1
Alarma sobrecalentamiento motor 5
Alarma sobrecalentamiento convertidor 6
Función de relé variable 1 7
Función de relé variable 2 8
Alisamiento de consigna de velocidad
Tabla 2-32 Alisamiento de consigna de velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–106 – online 4 3...10000 ms Constante de tiempo alis. reg. de vel. HPC(Activación/desactivación vía P–053 o función deborne programable nº 25)
P–053 – online 4 0...FFFF Hex Palabra de mando
Bit Valor
4 0000H0010H
Alisamiento consigna vel. inactivoAlisamiento consigna vel. activo
Ganancia, t. acción integral reg. velocidad
Tabla 2-33 Ganancia, t. acción integral reg. velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–111 – online 4 3,0...240,0 Dec Ganancia P reg. de velocidad HPCEl ajuste de la ganancia P es, para el mismo fac-tor de ganancia, 4 veces inferior al modo normal.
P–112 – online 4 2...6000 ms T. acción integral reg. de velocidad HPC
Optimización delregulador
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-52 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Adaptación de flujo
Tabla 2-34 Adaptación de flujo
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–119 – online 4 5...100 % Adaptación de flujo HPCReducción del flujo magnético del motor(para reducir la emisión de ruidos)
Filtro digital canal de consigna de par
En modo eje HPC es posible parametrizar 2 filtros digitales succesivos.
Sin embargo, los filtros sólo pueden activarse si el período de muestreo delregulador de velocidad se ha ajustado a 0,6 ms en P–117.
El período de muestreo actual puede leerse en la visulización de estado(apt. 2.2.1). (Filtros digitales, v. apt. 4.1).
Tabla 2-35 Filtro digital canal de consigna de par
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–118 – online 4 0...FFFF Hex Tipo de filtro de consigna de par
Bit Valor
00000H0001H
Parabanda, modo normalPaso bajo, modo normal
80000H0100H
Parabanda filtro 1 modo eje HPCPaso bajo filtro 1 modo eje HPC FW 2.00
90000H0200H
Parabanda filtro 2 modo eje HPCPaso bajo filtro 2 modo eje HPCFW 2.00
P–091 – online 4 45...750 Hz Frecuencia filtro 1 HPCPaso bajo: frecuencia de corte 3 dBParabanda: frecuencia central
P–092 – online 4 0,50...10,00 Dec Factor de calidad filtro 1 HPCFactor de calidad del filtro parabanda,factor de calidad = 1 corresponde a 1,00
P–107 – online 4 45...750 Hz Frecuencia filtro 2 HPC
P–108 – online 4 0,50...10,00 Dec Factor de calidad filtro 2 HPC
Módulos de cabezal (HS)2.3 Otras aplicaciones
07.94

HS
10.00
HS/2-53 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-35 Filtro digital canal de consigna de par
Atributos de parámetors
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–117 – 4 0...FFFF Hex Selección del filtro de consigna de par
Bit Valor
online0
0000H0001H
Filtro modo normal no activoFiltro modo normal activo
online8
0000H
0100H
Filtro 1 modo eje HPC no activoFiltro 1 modo eje HPC activo FW 2.00
online9
0000H
0200H
Filtro 2 modo eje HPC no activoFiltro 2 modo eje HPC activo FW 2.00
RESET
10
0000H
0400H
Período de muestreo regulador develocidad 0,5 ms, no es posiblefiltro en modo eje HPCPeríodo de muestreo regulador develocidad 0,6 ms,es posible activar los filtros enmodo eje HPCFW 2.00
En el modo eje HPC no están disponibles las funciones de diagnóstico siguien-tes:
Parámetro de diagnóstico P–020 (vigilancia de dn/dt), P–320, P–321
Función de registrador de transitorios
Modo mando de I/f
Diagnóstico
Módulos de cabezal (HS)2.3 Otras aplicaciones
04.97

HS
10.00
HS/2-54 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3.7 Limitación máxima de corriente (Limitación I2t, a partir de FW 3.1)
A partir de FW 3.1 existe una limitación de corriente máxima para la protecciónde la etapa de potencia. La característica se puede tomar de la curva carac-terística en la Fig. 2-3.
Imax (P–317)
IS6 (P–318)
IN
t10 s
I
240 s (4 min)
hasta FW 3.00
a partir de FW 3.00
0,7 IN
Figura 2-3 Curva característica con parametrización estándar de la limitación I2t
La corriente máxima se puede reducir adicionalmente según el ajuste de paráme tros (P–317, P–318). La activación de la limitación de corriente se puede leer a través de los parámetros de diagnóstico (P–319, P–322).
Tabla 2-36 Parámetros para la limitaciónr I2t
Atributos de parámetors
DescripciónNúmero Modif. activa P–051 Margen de ajuste
DescripciónNúmero Modif. activa P 051 g j
P–317 inmediatamente 4 25 ... 100 % Factor de reducción máx. ciclo de cargaI2tReducción de la corriente máx. de la etapa depotencia con el ciclo de carga de 10 s.
P–318 inmediatamente 4 25 ... 100 % Factor de reducción 6S ciclo de carga I2t Reducción de la corriente máx. de la etapa depotencia con el ciclo de carga S6 de 4 min.
(P–319) – – – Diagnóstico modelo de potencia I2tEl parámetro indica que la limitación se haactivado. Cada vez que se alcanza la curvacaracterística de reducción (al cabo de 10 s)se incrementa el contenido de P–319.
(P–322) – – – Limitación de carga I2tVisualización de valor real del valor de limita-ción actual (máx. 100 % con relación aP–039).
Descripción
Módulos de cabezal (HS)2.3 Otras aplicaciones
10.00

HS
3.1 Interfase consigna analógica de velocidad10.00
HS/3-55 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Parametrización de las interfases del convertidor
3.1 Interfase de consigna analógica de velocidad
Selección del canal de consigna de velocidad
Normalización de la consigna analógica de velocidad
Transmisión unipolar de la consigna de velocidad (sentido de giro fijo)
Velocidad estacionaria mínima
Tabla 3-1 Selección del canal de consigna de velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–113 – online 4 0...3 dec Selección canal consigna velocidad
P–113 B.56/14 B.24/8
01231)
offonoffon
offoffonon
1) Adición de entradas de consigna
Sinopsis
Selección canalde consigna de velocidad
Módulos de cabezal (HS)
3
10.94
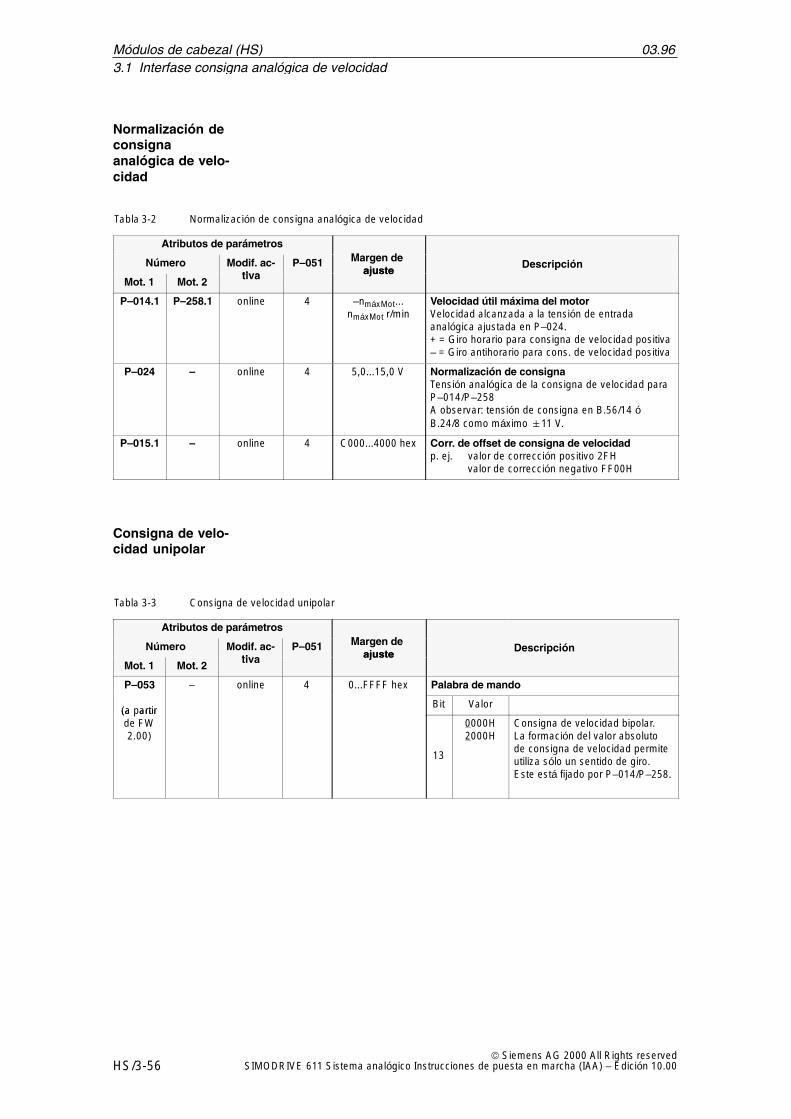
HS
3.1 Interfase consigna analógica de velocidad10.00
HS/3-56 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-2 Normalización de consigna analógica de velocidad
Atributos de parámetrosM dNúmero Modif. ac-
tivaP–051 Margen de
ajusteDescripción
Mot. 1 Mot. 2tiva ajuste
p
P–014.1 P–258.1 online 4 –nmáxMot...nmáxMot r/min
Velocidad útil máxima del motorVelocidad alcanzada a la tensión de entradaanalógica ajustada en P–024.+ = Giro horario para consigna de velocidad positiva– = Giro antihorario para cons. de velocidad positiva
P–024 – online 4 5,0...15,0 V Normalización de consignaTensión analógica de la consigna de velocidad paraP–014/P–258A observar: tensión de consigna en B.56/14 óB.24/8 como máximo 11 V.
P–015.1 – online 4 C000...4000 hex Corr. de offset de consigna de velocidadp. ej. valor de corrección positivo 2FH
valor de corrección negativo FF00H
Tabla 3-3 Consigna de velocidad unipolar
Atributos de parámetrosM dNúmero Modif. ac-
tivaP–051 Margen de
ajusteDescripción
Mot. 1 Mot. 2tiva ajuste
p
P–053 – online 4 0...FFFF hex Palabra de mando
(a partirBit Valor
(a artirde FW2.00)
13
0000H2000H
Consigna de velocidad bipolar. La formación del valor absolutode consigna de velocidad permiteutiliza sólo un sentido de giro.Este está fijado por P–014/P–258.
Normalización deconsignaanalógica de velo-cidad
Consigna de velo-cidad unipolar
Módulos de cabezal (HS) 03.96

HS
3.1 Interfase consigna analógica de velocidad10.00
HS/3-57 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-4 Velocidad estacionaria mínima
Atributos de parámetros
Número Modif. ac- P–051 Margen de ajuste Descripcióntiva
g j p
P–030 online 4 0...nmáxMot r/min Velocidad estacionaria mínimaNo hay funcionamiento en régimen estacionariodentro del margen de velocidad alrededor de 0. El paso por este margen de velocidad se efectúasiguiendo los tiempos de rampa (de aceleración odesaceleración) actuales cuando la consigna develocidad sobrepasa la velocidad estacionariamínima en el sentido de giro opuesto.La velocidad 0 solo puede obtenerse inhibiendolas señales de desbloqueo cableadas.FW 2.00
Velocidad estacionaria mínima
Consigna efectiva [r/min]
Consigna transmitida [r/min]200
200
Velocidad estacio-naria mínima
Módulos de cabezal (HS)07.94

HS
10.00
HS/3-58 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.2 Bornes de entrada
Precaución
La programación de los parámetros P–081 a P–089 correspondientes a lasfunciones de borne solo puede realizarse una vez bloqueados los impulsos(B.63 ó B.663 abiertos).
3.2.1 Funciones de bornes cableadas (de asignación fija)
Tabla 3-5
Funciones de bor-nes
Descripción Número delborne
Desbloqueo de im-pulsos específico deeje
El desbloqueo del ondulador (alimentación motor) se obtiene aplicando señal dedesbloqueo en el borne 663 (desbloqueo de impulsos específico de eje) y elborne 65 (desbloqueo de regulador).Si se suprime el desbloqueo de impulsos mientras gira el motor, el ondulador sebloquea tras 20 ms y el motor se para de forma natural por rozamiento.
663
Desbloqueo de re-gulador
La apertura del borne 65 durante el giro del motor provoca la deceleración si-guiendo la rampa correspondiente.Si la velocidad baja del umbral nmín (P–022), se bloquea el ondulador y el motorse para sin inversión transitoria de sentido.
65
Paro rápido del ge-nerador de rampas
Si se aplica tensión de desbloqueo en el borne 81, se habilita la consigna develocidad. La apertura del borne provoca la anulación digital de la consigna develocidad. El motor decelera al límite de par sin seguir la rampa de deceleración.Si está activado el bit 1 de P–053, los impulsos se bloquean cuando se anula lavelocidad.
81
Módulos de cabezal (HS)3.2 Bornes de entrada
10.94

HS
10.00
HS/3-59 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.2.2 Funciones de bornes programables
Asignación de funciones de bornes
Funciones de bornes
Tabla 3-6 Asignación de funciones de bornes
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
P–081a
P–089
– online 4 1...34 dec Asignación de funiones de bornes E1 a E9La asignación de los bornes E1 a E9 se efectúainscribiendo el número de función. La tabla si-guiente muestra los ajustes de fábrica.
Tabla 3-7 Funciones de bornes
Función de borne Descripción Nºfun-ción
Borne en-trada
De fábrica
2º límite de par El segundo límite de par se activa cuando se aplica señal en este borne yse sobrepasa la velocidad de conmutación ajustada en P-050.
1 E1 (P–081)
Oscilación Para engranar los escalones del reductor se prescriben las consignas develocidad descritas en el apt. 2.2 “Aplicaciones estándar”.
2 E6 (P–086)
Borrar memoria fallos(R)(acuse de fallos)
Permite el acuse a distancia de señalizaciones de fallo.Para el acuse es necesario que esté abierto el borne 65 (desbloqueoregulador).
3 E3 (P–083)
Modo mando par Permite conmutar del modo Regulación de velocidad de giro al modoMando de par.
4 E5 (P–085)
Estrella/triángulo Permite conmutar entre estrella (abierto) y triángulo (tensión de desblo-queo).
5 –
Modo M19 Función auxiliar CN para parada orientada del cabezal. Si se utiliza esteborne, se conmuta a la normalización de consigna registrada en P-054cuando la velocidad baja del valor ajustado en P-054.
6 E4 (P–084)
Tpo. aceleración = 0 Si se aplica tensión de desbloqueo a este borne se anula el generador derampas interno.
7 E2 (P–082)
Bloqueo integradorreg. n
A través de este borne es posible bloquear la acción integral del regula-dor de velocidad.
8 –
Escalón 1 2 3 4 5 6 7 8Estos bornes permiten especificar un total de
Bit 0 0 1 0 1 0 1 0 1Estos bornes permiten especificar un total deocho juegos de parámetros para normalizaciónd i i il i d l id d j t d
9 E7 (P–087)
Bit 1 0 0 1 1 0 0 1 1
j gde consigna, vigilancia de velocidad, ajuste dereguladores, limitación de par y vigilancia de
10 E8 (P–088)
Bit 2 0 0 0 0 1 1 1 1reguladores, limitación de ar y vigilancia depar. 11 E9 (P–089)
Sinopsis
Asignación de fun-ciones de bornes
Funciones de bornes
Módulos de cabezal (HS)03.963.2 Bornes de entrada
12.9403.96

HS
10.00
HS/3-60 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Función de borne Descripción Nºfun-ción
Borne en-trada
De fábrica
Desbloqueo consigna(sólo para consignade velocidad)
De estar al aire este borne, se prescribe digitalmente consigna 0. Si seaplica en él tensión de desbloqueo, queda hablitada la consigna (consi-gna analógica o consigna de oscilación).
Si no se selecciona esta función de borne, está habilitada la consigna.
16 –
Posicionamiento in-cremental
Si el cabezal está en posición y se aplica tensión de desbloqueo a esteborne, entonces se suma la consigna de posicionamiento incremental(P–0123) a la consigna de posición actual. Con ello el accionamiento sedesplaza a la nueva posición así calculada.
22 –
Consignas posición1 ... 2
Asociado al borne con número de función 27, este borne sirve para selec-cionar las consignas de posición definidas con los parámetros P–121,P–122, P–124 y P–125 (v. apt. 2.3.3.)
23 –
Eje C En modo eje C es válida la normalización de consigna, más fina, ajustadaen P–114. Sólo se evalúa la entrada de consigna 2 (B.24 y B.8).
24 –
Alisamiento consignavelocidad
Aplicando en este borne tensión de desbloqueo se activa el alisamientode la consigna de velocidad. La constante de tiempo se ajusta en P–018(también vía P–053).
25 –
Inhibición F–11 Aplicando tensión de desbloqueo a este borne es posible inhibir el avisode fallo F–11 (regulador de velocidad en tope).
26 –
Consignas posición3 ... 4
Asociado al borne con el número de función 23, este borne sirve paraseleccionar las consignas de posición definidas en los parámetrosP–121, P–122, P–124 y P–125 (v. apt. 2.3.3.)
27 –
Posicionamiento ON Aplicando tensión de desbloqueo a este borne se lanza el posiciona-miento.
28 –
Resincronización decabezal
La aparición de un flanco positivo en este borne ocasiona una nuevasincronización cuando llega la próxima orden de posicionamiento vía elborne asignado a la función número 28.
Esta función tiene efecto biestable (con memoria).
29 –
Eje HPC
(a partir de FW 2.00)
Aplicando tensión de desbloqueo a este borne se selecciona el modoEje HPC siempre que esté activado el bit 8 en P–149.
30 –
Vigilancia desliza-miento
(a partir de FW 2.00)
Aplicando tensión de desbloqueo a este borne se activa la vigilancia dedeslizamiento en el modo con velocidad regulada.
32 –
Frecuencia de pulsa-ción de ondulador
Borne con-Func. nº
Parámetroactivo
Estos bornes permiten conmutar entre cuatrofrecuencias de pulsación (a partir de FW 3.00)E t f i d l j d t i
3334
(a partir de FW 3.00) 33 34
( )Estas frecuencias de reloj se determinan conlos parámetros P–053, P–331, P–332 y P–333
L L P–053los arámetros P–053, P–331, P–332 y P–333(véase el capítulo |Reference: “4.2”)
H L P–331
L H P–332
H H P–333
Módulos de cabezal (HS) 07.943.2 Bornes de entrada

HS
10.00
HS/3-61 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3 Bornes de salida
Precaución
La programación de los relés (P–241 a 247) sólo debe ser realizada una vezsuprimidos (bloqueados) los impulsos (B.63 o B.663 abierto).
3.3.1 Funciones de relés cableadas (de asignación fija)
Tabla 3-8 Funciones de relés cableadas
Función deborne
DescripciónNúmero del
borne
La función del relé es conmutable con P–053:
S ñ l li t /Bit Valor
672Señal. listo/nohay fallo es-pecífica de eje 0
0000H
0001H
El relé se excita en ausencia de falloy en presencia de desbloqueo deimpulsos y de regulador.El relé se excita en ausencia defallo.
672673674
Señal. reenvíoantiarranque
El relé (NC) se excita cuando la tensión de desblo-queo se aplica en el B.663 para el desbloqueo de im-pulsos específico de eje.
AS1AS2
3.3.2 Funciones de relés programables
Asignación de señalizaciones
Funciones de relé
Señalizaciones parametrizables
Palabra de mando de señalizaciones
Las señalizaciones por relé se actualizan cada 20 ms si se tiene un ciclo deregulador de velocidad de 1 ms. Con ciclo de regulador de velocidad de 0,5 ms,cada 10 ms (v. P–90, bit 3).
Tabla 3-9 Asignación de señalizaciones
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
P–241a
P–246
– online 4 1...20 dec Señalizaciones programables 1 a 6La asignación de las salidas de relé A11 a A61 seefectúa registrando el número de función. En la tabla siguiente figuran también los ajustesde fábrica.
Sinopsis
Nota
Asignación deseñalizaciones
Módulos de cabezal (HS)3.3 Bornes de salida
07.943.3 Bornes de salida

HS
10.00
HS/3-62 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-10 Funciones de relés
Función de relé Descripción Nºfun-ción
Salida relé
Aceleración ter-minada
El relé se excita cuando tras un salto de consigna, la velocidad real calculadaentra en la banda de tolerancia alrededor de la nueva consigna y permaneceen ella como mínimo 200 ms. Seguidamente se enclava la señalización en laposición activada hasta que se modifique la consigna de velocidad.El ancho de la banda de tolerancia puede ajustarse en P–027.
Incluso aunque la velocidad real calculada abandone la banda de toleranciatras 200 ms permanece activa la señalización a no ser que se haya modifi-cado entretanto la consigna.
Si se abandona la banda de tolerancia antes de transcurrir 200 ms se desac-tiva la señalización “Aceleración terminada”.
Fluctuaciones de velocidad causadas por cambios de carga no provocan ladesexcitación del relé.
El tiempo de 200ms puede parametrizarse con P–256 a partir de FW 3.00.
2 A11 (P–241)
Md < MdxEl relé se excita para Md < Mdx. Esto es ajustable vía P–047.Si en caso de modificación de consigna de velocidad se desexcita el relénreal = ncons, el relé Md < Mdx sólo puede desexcitarse 800 ms después deque haya vuelto a excitarse el relé nreal = ncons.
El tiempo de 800ms puede parametrizarse con P–257 a partir de FW 3.00.
3 A21 (P–242)
nreal < nmín El relé se excita para nreal < nmín; esto es ajustable vía P–021. 1 A31 (P–243)
nreal < nxEl relé se excita para nreal < nx; esto es ajustable vía P–023. 4 A41 (P–244)
Alarma sobre-temperatura mo-tor
El relé se desexcita en caso de sobrecalentamiento del motor; esto es ajusta-ble vía P–063.Si se mantiene la anomalía, el convertidor se desconecta señalizando F–14tras el tiempo ajustado en P–065.
En caso de cortocircuito e interrupción de la línea, el relé conmuta inmediata-mente y se desconecta al cabo de aprox. 6 s con el mensaje de error F–19.
5 A51 (P–245)
Alarma sobre-temperatura con-vertidor
El relé se desexcita cuando actúa el termostato montado en el disipador prin-cipal.Si se mantiene la sobretemperatura, el convertidor se desconecta, señali-zando F–15, tras aprox. 20 s.
6 –
Función de relévar. 1
V. descripción “Función de relé variable”, apt. 3.3.3. 7 A61 (P–246)
Función de relévar. 2
V. descripción “Función de relé variable”, apt. 3.3.3. 8 –
En posición 1 El relé se excita cuando se ha ejecutado el programa de posicionamiento y elcabezal se encuentra dentro de la banda de tolerancia ajustada en P–144.
9 –
En posición 2 El relé se excita cuando se ha ejecutado el programa de posicionamiento y elcabezal se encuentra dentro de la banda de tolerancia ajustada en P–145.
10 –
Relé estrella A través de este relé es posible mandar el relé auxiliar externo para conmutaral devanado estrella.
11 –
Relé triángulo A través de este relé es posible mandar el relé auxiliar externo para conmutaral devanado triángulo.
12 –
nreal = ncons (ac-tual)
La señalización “nreal = ncons (actual)” se activa una vez que la velocidad realcalculada ha llegado a la banda de tolerancia alrededor de la consigna develocidad y ha permanecido como mínimo 200 ms en ella.Tan pronto como se abandona la banda de tolerancia se desactiva la señali-zación “nreal = ncons (actual)”.
El tiempo de 200ms puede parametrizarse con P–256 a partir de FW 3.00.
20 –
Funciones de relés
Módulos de cabezal (HS)3.3 Bornes de salida3.3 Bornes de salida

HS
10.00
HS/3-63 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-11 Señalizaciones parametrizables
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–021.1 P–260.1 online 4 0...nnom r/min nmín para señalización “nreal < nmín”
Umbral de funcionamiento del relé nreal < nmín
P–023.1 P–262.1 online 4 0...nmáxMot r/min nx para señalización “nreal < nx”
Umbral de funcionamiento del relé nreal < nx
P–027.1 P–263.1 online 4 0...nnom/16 r/minBanda de tolerancia para señalización “nreal = ncons”
P–047.1 – online 4 0...100 % Mdx para señalización “Md < Mdx”Este ajuste se expresa en porcentaje del límite depar actual.
P256 – online 4 0,00...0,50 Retardo señalización “nreal=ncons”, FW 3.00
P257 – online 4 0,00...1,00 Retardo señalización “Md < Mdx”, FW 3.00
Tabla 3-12 Palabra de mando Señalizaciones
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–247 – online 4 0...FFFF hex Palabra de mando Señalizaciones
Bit Valor
0
1
2
3
4
5
0001H
0002H
0004H
0008H
0010H
0020H
Inversión de la función del reléen salida B. A11 Inversión de la función del reléen salida B. A21Inversión de la función del reléen salida B. A31Inversión de la función del reléen salida B. A41 Inversión de la función del reléen salida B. A51 Inversión de la función del reléen salida B. A61
Señalizaciones pa-rametrizables
Palabra de mandoSeñalizaciones
Módulos de cabezal (HS)07.943.3 Bornes de salida

HS
10.00
HS/3-64 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3.3 Función de relé variable
Tabla 3-13 Función de relé variable
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–185 – online 4 0...FFFF hex Dirección para vigilancia 1Dirección de variables en RAM
P–186 – online 4 0...FFFF hex Umbral para vigilancia 1Valor de comparación para el contenido de varia-bles en RAM; (direcciones, v. apt. 6.5)
P–187 – online 4 0,00...10,00 s Retardo a la excitación vigilancia 1
P–188 – online 4 0,00...10,00 s Retardo a la desexcitación vigilancia 1
P–189 – online 4 0...FFFF hex Histéresis vigilancia 1(histéresis para umbral P–186)
P–190 – online 4 0...FFFF hex Dirección para vigilancia 2
P–191 – online 4 0...FFFF hex Umbral para vigilancia 2
P–192 – online 4 0,00...10,00 s Retardo a la excitación vigilancia 2
P–193 – online 4 0,00...10,00 s Retardo a la desexcitación vigilancia 2
P–194 – online 4 0...FFFF hex Histéresis vigilancia 2(histéresis para umbral P–191)
P–247 – online 4 0...FFFF hex Palabra de mando Señalización
Bit Valor
8
0000H
0100H
Función de relé variable 1 conconsulta de signoFunción de relé variable 1 conconsulta de valor absoluto
9
0000H
0200H
Función de relé variable 1 conconsulta de signoFunción de relé variable 1 conconsulta de valor absoluto
12
0000H
1000H
Función de relé variable 1 conP–186 como umbralFunción de relé variable 1 paratest de bits.El umbral (P–186) se combinacon una función Y con la varia-ble en RAM a vigilar (P–185)FW2.00
13
0000H
2000H
Función de relé variable 2 conP–191 como umbralFunción de relé variable 2 paratest de bits, FW2.00
Indicación
En el anexo (apt. 6.5) figura una lista con las principales magnitudes de me-dida (variables en RAM) con sus direcciones.
Módulos de cabezal (HS) 10.943.3 Bornes de salida

HS
10.00
HS/3-65 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3.4 Señales del captador en motor para CN
Tabla 3-14 Señales del captador en motor para CN
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j
P–033 – online 4 0...7 Dec Resolución del captador para CNSi el captador en motor suministra señales rectan-gulares, esto permite ajustar los factores multipli-cadores siguientes.
P–033 FactorImpulsosrectang.
Velocidad límite[r/min] paraRON350/ERN 1387
1 1 2048 16000
3 0,5 1024 16000
5 2 4096 5000
7 4 8192 2500
0Hasta FW 2.40 salida con factor 1.A par-
tir de FW 3.00 sin salida de impulsos
0
Hasta FW 2.40 salidacon factor 1.A partir
de FW 3.00 sin salidade impulsos
Captador ruedadentada
256 I/vuelta 2
1 1 256 24000
3 0,5 128 24000
5 2 512 24000
7 4 1024 12000
0
Hasta FW 2.40 salidacon factor 1.A partir
de FW 3.00 sin salidade impulsos
Captador ruedadentada
512 I/vuelta
1 1 512 12000
3 0,5 256 12000
5 2 1024 12000
7 4 2048 6000
0Hasta FW 2.40 salida con factor 1.A par-
tir de FW 3.00 sin salida de impulsos
Módulos de cabezal (HS)3.3 Bornes de salida
10.00

HS
10.00
HS/3-66 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3.5 Salidas analógicas
Función
Datos técnicos
Parametrización de CDA 1, CDA 2 (CDA = DAU)
Normalización fina
Salida analógica de variables en RAM para fines de medida y de diagnóstico
2 canales de salida en bornes A91 (CDA 1) y A92 (CDA 2)
Margen de tensión ± 10 V
Normalización grosera, compensación de offset
Resolución de señal 7 bits + signo
Normalización fina para
– valor real de velocidad en valor absoluto
– tasa de utilización
– M/Mnom
Polaridad de la tensión de salida ajustable por normalización fina(± 200 %)
Ajuste de fábrica
– A91 10 V cuando se alcanza la velocidad de giro máxima (nreal =P–029)
– A91 10 V cuando se alcanza el par o la potencia (Mdmáx Pmáx =P–039)
Sinopsis
Función
Datos técnicos
Módulos de cabezal (HS)3.3 Bornes de salida

HS
10.00
HS/3-67 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-15 Parametrización CDA 1, CDA 2
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–066 – online 4 0...FFFF hex Dirección CDA 1Dirección de la variable en RAM a sacar víaCDA 1.Ajuste prefijado: n/nmáx (dirección RAM: 3044H)Ejemplo de ajuste:Temperatura del motor en ºC ––> dirección RAM:conmutación FC2 a través de P–067
P–067 – online 4 0...15 dec Factor de decalaje CDA 1Desplazamiento a la izda. de los valores seleccio-nados1 corresponde a una multiplicación por 2n corresponde a una multiplicación por 2n
P–078 – online 4 7F...FF80 hex Offset CDA 1Compensación de un eventual offset en CDA 1
P–068 – online 4 0...FFFF hex Dirección CDA 2Ajuste prefijado: M/Mmáx o. P/Pmáx (tasa decarga)(dirección RAM: 3048H).P–071 permite ajustar un alisamiento o filtrado.
P–069 – online 4 0...15 dec Factor de decalaje CDA 2
P–079 – online 4 7F...FF80 hex Offset CDA 2
Factor decalaje = 0Factor decalaje = 2
2000H
–10,0
0
+10,0
Tensión de salida [V]
0000H 4000H 6000H 8000H A000H C000H E000H FFFFH
1er rebase 2º rebase 3er rebase 4º rebase
Offset = 0 VNormalización fina = 100 %
Valor hexadecimal
ParametrizaciónCDA 1, CDA 2
Módulos de cabezal (HS)3.3 Bornes de salida
03.96

HS
10.00
HS/3-68 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
La normalización grosera (P–067, P–069) debe estar ajustada a 0H, de lo con-
trario no actúa la protección de sobrerregulación de los DAU
Tabla 3-16 Normalización fina
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–012 – online 4 –200,0...200,0 % Normalización CDA indicación nrealPara P–012 = 100 % se tiene:Velocidad máxima (P–029) corresponde a +10 VSalida vía dirección 3044H, prefijado a CDA1.Ciclo de actualización a partir de FW 3.00: 1ms(antes: 20ms)
P–013 – online 4 –200,0...200,0 % Normalización CDA indicación P/PmáxIndica la tasa de utilizaciónn = 0 a nnom: Md/Mdmáxn > nnom: P/Pmáx(Se consideran los límites de par actuales P–039,P–041)Para P–013 = 100 % se tiene:Par máximo o potencia corresponde a +10 V.Salida vía dirección 3048H, prefijado a CDA2.Ciclo de actualización a partir de FW 2.40: 1ms(antes: 20ms)
P–026 – online 4 –200,0...200,0 % Normalización CDA M/MnomPara P–026 = 100 % se tiene:
Par nominal corresponde a +5 VM/Mnom tiene signo, es decir,par nominal negativo corresponde a –5 V.Salida vía dirección 304CH, no prefijado.Ciclo de actualización a partir de FW 3.00: 1ms(antes: 20ms)
P–071 – online 4 2...32767 ms Tiempo alisamiento CDA indicación de tasa decarga(a partir de FW 2.40, no en el modo eje HPC)Salida vía dirección 3048H, prefijado a CDA2
Indicación
En el anexo (apt. 6.5) figura una lista de las principales magnitudes de medida(variables en RAM) con sus direcciones.
Normalización fina
Módulos de cabezal (HS)3.3 Bornes de salida

HS
10.00
HS/4-69 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Optimización de reguladores
4.1 Optimización del regulador de velocidad
Alisado de consigna de velocidad
Alisamiento del valor real de velocidad
Generador de rampas
Ganancia, tiempo de acción integral
Adaptación del regulador de velocidad
Alisamiento de consigna de par (pT1)
Filtro digital de canal de consigna de par
Temporización “Regulador de velocidad en tope”
Tabla 4-1 Alisado de consigna de velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–018 – online 4 3...10000 ms Cte. de tiempo alisado consigna de velocidad(Activación/desactivación vía P–053 o borne asi-gnado a función Nº 25)
P–019 – online 4 0...30 dec Redondeo de la consigna de velocidad(elemento pT2)Sólo actúa si está activado el alisamiento de con-signa de velocidad.0: no hay redondeo30: redondeo máximo
P–053 – online 4 0...FFFF hex Palabra de mando
Bit Valor
50000H0010H
Alisado cons. veloc. desacti-vadoAlisado cons. veloc. activado
Sinopsis
Alisado de consi-gna de velocidad
Módulos de cabezal (HS)4.1 Optimización del regulador de velocidad
04.97
4

HS
10.00
HS/4-70 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-2 Alisamiento valor real velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–034 – online 4 1...10 ms Cte. tiempo alisamiento valor real velocidad(activar/desactivar con P–053, bit 5) FW 3.00Sólo posible con exploración del regulador de ve-locidad de giro de 1 ms (P–090.3 = 0).
P–053 – online 4 0...FFFF hex Palabra de mando
Bit Valor
5
0000H0020H
Alisamiento v. real vel. inhibidoAlisamiento v. real vel. activadosi simultáneamente P–090 bit3=0(frecuencia regulador de ve-locidad de giro = 1 ms)
Tabla 4-3 Generador de rampas
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–016.1 – online 4 0,01...64,00 s Tiempo de aceleración generador de rampasde n = 0 a nmáx (P–029)
P–017.1 – online 4 0,01...64,00 s Tiempo desaceleración generador de rampasde nmáx (P–029) a n = 0
P–053 – online 4 0...FFFF hex Palabra de mando
Bit Valor
120000H1000H
Corrección gen. rampas activaCorrección gen. rampas no ac-tiva
Velocidad Velocidad
Tiempo Tiempo
Consignade veloc.
Salida gen. de rampas
Velocidad real
sin corrección del gen. de rampas
Consigna develocidad
con corrección del gen. de rampas
Velocidad real
Salida gen. de rampas
Alisamiento valorreal velocidad
Generador de rampas
Módulos de cabezal (HS)4.1 Optimización del regulador de velocidad

HS
10.00
HS/4-71 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-4 Ganancia, tiempo de acción integral
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–031.1 P–265.1 online 4 3,0...120,0 dec1) Ganancia P del regulador de velocidad
P–032.1 P–266.1 online 4 5...6000 ms Tiempo acción integral del reg. velocidad
P–090 – online 4 0...FFFF hex Palabra de mando
Bit Valor
6
0000H
0040H
Si está al máximo el reguladorde velocidad, la acción I estápuesta a 0.Si está al máximo el reguladorde velocidad, el integrador estádetenido.FW 2.00
1) a partir de FW 3.10: 6.0...240,0 Dec
Ganancia, tiempode acción integral
Módulos de cabezal (HS)4.1 Optimización del regulador de velocidad

HS
10.00
HS/4-72 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-5 Adaptación del regulador de velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–195 P–283 online 4 0...nmáxMot r/min Velocidad de adaptación inferior
P–196 P–284 online 4 0...nmáxMot r/min Velocidad de adaptación superior
P–198 P–285 online 4 1,0...120,0 dec1) Ganancia P velocidad de adaptación superior
P–199 P–286 online 4 1...200 % Velocidad reducción de ganancia P(Multiplicación de la característica de ganancia Pen todo el margen de velocidad)
P–201 P–288 online 4 5...6000 ms T. integr. velocidad de adaptación superior
P–202 P–289 online 4 1...200 % Factor reducción tiempo de acción integral(Multiplicación de la característica de tiempo deacción integral en todo el margen de velocidad)
P–203 P–293 online 4 0...7 dec Pal. de mando adapt. regulador velocidad ¡La adaptación es solo posible en el escalón 1!
Bit
no hay adaptación
adaptación de reg. de vel. act.
Valor
10000H
0002H
Velocidad [r/min]
P–202
P–032.1
P–031.1
P–199
P–199
P–202
P–198
P–201
Ganancia P [dec]
T. acc. integral [ms]
P–195 P–196
1) a partir de FW 3.10: 6.0...240,0 Dec
Adaptación del re-gulador de veloci-dad
Módulos de cabezal (HS)4.1 Optimización del regulador de velocidad

HS
10.00
HS/4-73 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-6 Alisamiento de consigna de par (pT1)
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–035 – online 4 3...10000 ms Cte. tiempo de alisamiento de consigna de par
P–045 P–274 online 4 1...nmáxMot r/min Vel. activación de alisamiento consigna de parA partir de esta velocidad se activa el alisamientode la consigna de par
P–046 P–275 online 4 0...nnom 1/min Histéresis P–045/P–275
P–044 – online 4 0...1 hex Selección alisamiento consigna de par0: no hay alisamiento de consigna de par1: alisamiento de consigna de par por encima de
la velocidad de activación (P–045)
Alisamiento deconsigna de par(pT1)
Módulos de cabezal (HS)4.1 Optimización del regulador de velocidad
07.94

HS
10.00
HS/4-74 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-7 Filtro digital del canal de consigna de par
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–118P–281
onlineonline
44
0...FFFF hex0...1 hex
Tipo de filtro de consigna de par0: Filtro parabanda1: Filtro paso bajo
P–103 P–276 online 4 50...450 Hz Frecuencia del filtro de consigna de parPaso bajo: frecuencia de corte 3 dBParabanda: frecuencia central
P–104 P–277 online 4 0,10...10,00 dec Calidad del filtro de consigna de parFactor de calidad del filtro parabanda, F. calidad = 1 corresponde a 1.00
P–117P–280
onlineonline
44
0...FFFF hex0...1 hex
Activación filtro de consigna de par0: filtro digital desactivado1: filtro digital activado
Frecuencia [Hz]
Amplitud Amplitud
P–103Paso bajo
3dB
Frecuencia [Hz]
P–104 2
P–104 0,5
P–103Parabanda
Tabla 4-8 Temporización “regulador de velocidad en tope”
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–248 – online 4 100...10000 ms Temporización señalización fallo F–11La señalización de fallo se emite si el regulador develocidad está plenamente abierto durante eltiempo especificado en P–248 sin que el valor realde velocidad haya sobrepasado el umbral internonnom/256.
Filtro digital delcanal de consignade par
Temporización“regulador develocidad en tope”
Módulos de cabezal (HS)4.1 Optimización del regulador de velocidad
10.94

HS
10.00
HS/4-75 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.2 Optimización del regulador de intensidad
Indicación
Generalmente no es necesario modificar los parámetros indicados a continua-ción ya que el ajuste óptimo del regulador de intens. se calcula a partir de lascaracterísticas del motor y del convertidor (ondulador) que lo alimenta.
Regulador de intensidad
Frecuencia de pulsación del ondulador
Tabla 4-9 Regulador de intensidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–116 P–278 online 4 –225...255 dec Corrección ganancia P regulador intesidadAdición de un offset algebráico a la ganancia P delregulador de intensidad.
P–120 P–292 online 4 500...10000 r/min Vel. conmut. de adaptación de reg. intensidadSi se sobrepasa una cierta velocidad se aumentala ganancia P del regulador de intensidad.
(P–316) – online 4 – Indicación ganancia P regulador intensidadSe indica la ganancia P actual del regulador deintensidad.
Sinopsis
Reguladorintensidad
Módulos de cabezal (HS)4.2 Optimización del regulador de intensidad
04.97

HS
10.00
HS/4-76 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-10 Frecuencia de pulsación del ondulador 1
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–053 – online 4 0...FFFF hex Palabra de mando
BitValorValor
Frec. pulsación [kHz]
8910
0000H0200H0400H0600H0100H0300H0500H0700H
3,26,34,77,82,8 a partir de FW 3.005,0 a partir de FW 3.003,9 a partir de FW 3.005,9 a partir de FW 3.00
Nota: Una frecuencia de pulsación > 3,2 kHzexige reducir la potencia (v. tabla 1-3).
Tabla 4-11 Frecuencia de pulsación del ondulador 2, 3 y 4
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–331P–332P–333
–––
onlineonlineonline
444
0–7 hex0–7 hex0–7 hex
Frecuencia puls. ondulador 2 a partir de FW 3.00Frecuencia puls. ondulador 3 a partir de FW 3.00Frecuencia puls. ondulador 4 a partir de FW 3.00
Valor Frec. pulsación [kHz]
00000001000200030004000500060007
3,22,86,35,04,73,97,86,1
Posibilidades de ajuste
(P–330) – online – 2,8–7,8kHz Indicación de la frecuencia de pulsación actual
Las frecuencias de reloj de ondulador ajustadas con estos parámetros se pue-den conmutar a través de bornes de entrada (véase el capítulo 3.2.2)
Frecuencia pulsa-ción ondulador
Módulos de cabezal (HS)4.2 Optimización del regulador de intensidad
04.97

HS
10.00
HS/5-77 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Diagnóstico y análisis de fallos
5.1 Herramientas de diagnóstico
5.1.1 Indicación en display de valores medidos
Tabla 5-1 Indicación en display de valores medidos
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
(P–001) – – – –20000...20000 r/min
Consigna de velocidad
(P–002)(P–102)
– – ––20000...20000
r/minVelocidad real
(P–003) – – – 0...500 V Tensión de motor
(P–004) – – – 0...100,0 %Capacidad de carga utilizada (referida al límitede par actual)
(P–006) – – – 0...700 V Tensión del circuito intermedio
(P–007) – – – 0...150 A Intensidad de motor
(P–008) – – – 0...100 kVA Potencia reactiva motor
(P–009) – – – 0...100 kW Potencia activa motor
(P–010) – – – 0...150 °C Temperatura de motor
(P–101) – – – –200...200 % Consigna para modo Mando de par
(P–330) – – – 2,8...7,8 kHz Frecuencia de pulsación de ondulador
Módulos de cabezal (HS)
5
5.1 Herramientas de diagnóstico04.97

HS
10.00
HS/5-78 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.2 Indicaciones de estado
v. apt. 2.2.1 tabla 2-10
Tabla 5-2 P–011 Estado de las entradas binarias
Display
Valor vi-sual.
–
B.63Desbloqueo im-pulsos central
NE
B.E6
programablevía P–086
B.E2
programablevía P–082
B.663
Desbloqu. imp.especif. eje
–
B.64Desbloqueo im-pulsos central
NE
B.E7
programable víaP–087
B.E3
programable víaP–083
B.65
Desbloque. imp.especif. eje
– –
B.E8
programable víaP–088
B.E4
programable víaP–084
B.81abierto
Paro rápidog. rampas
– –
B.E9
programable víaP–089
B.E5
programable víaP–085
B.E1
programable víaP–081
La indicación de varias señalizaciones es posible, en este caso se obtiene la suma hexadecimal.Ejemplo: 4H + 8H = CH
P–000, P–100Visualización deestado
P–011 Estado de las en-tradas binarias
Módulos de cabezal (HS)5.1 Herramientas de diagnóstico
07.94

HS
10.00
HS/5-79 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-3 P–254 Indicación de las funciones activas 1
Display
Valor vi-sual.
– –
Fct. Nº 9
EscalónBit 0
Fct. Nº 5
Estrella/triángulo
Fct. Nº 1
2º límite de par
– –
Fct. Nº 10
EscalónBit 1
Fct. Nº 6
Modo M19
Fct. Nº 2
Oscilación
– –
Fct. Nº 11
EscalónBit 2
Fct. Nº 7
TH = 0
Fct. Nº 3
Borrar memoriade fallos
(acuse fallo)
–
Fct. Nº 16
Desbloqueoconsigna
–
Fct. Nº 8
Bloqueo integra-dor reg. vel.
Fct. Nº 4
Modo Mando depar
La indicación de varias señalizaciones es posible, en este caso se obtiene la suma hexadecimal.Ejemplo: 4H + 8H = CH
P–254Indicación delas funcionesactivas 1
Módulos de cabezal (HS)5.1 Herramientas de diagnóstico
07.94

HS
10.00
HS/5-80 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-4 P–255 Indicación de las funciones activas 2
Display
Valor vi-sual.
–Fct. Nº 26
Inhibición F–11– –
Fct. Nº 32
Vigilancia desli-zamiento
–
Fct. Nº 23
Consignas deposición 1...2
Fct. Nº 30
Eje HPC–
Fct. Nº 33
Frecuencia depulsación del
ondulador Bit 0
–
Fct. Nº 27
Consignas deposición 3...4
Fct. Nº 24
Eje C
Fct. Nº 22
Posicionamientoincremental
Fct. Nº 34
Frecuencia depulsación del
ondulador Bit 1
–
Fct. Nº 28
Posicionamientoactivado
Fct. Nº 25
Alisamiento con-signa velocidad
activo
Fct. Nº 29
Resincroniza-ción del cabezal
–
La indicación de varias señalizaciones es posible, en este caso se obtiene la suma hexadecimal.Ejemplo: 4H + 8H = CH
P–255 Indicación de las funciones activas 2
Módulos de cabezal (HS) 10.945.1 Herramientas de diagnóstico

HS
10.00
HS/5-81 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.3 Parámetros de diagnóstico
Tabla 5-5 Parámetros de diagnóstico
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
(P–020) – – – – Diagnóstico valor real de velocidadEl aumento permanente de varios incrementos essinónimo de perturbaciones importantes. (Contadorpara vigilancia de dn/dt.)Causas posibles:
Pantalla de cable de captador no puesta a tierra
Captador defectuoso
Puesta a tierra de la masa de la electr. incor-recta
Tierra de motor no conectada al módulo HSA
Circuito de medida 1 defectuoso
Valor ajustado para momento de inercia del mo-tor demasiado grande (P–159, P–219)
(P–028) – – – – Diagnóstico
Bit Valor
3 0008H Alarma sonda de temperatura
Rotura
Cortocircuito
13 2000H Interrupción por fallo en la rutinade cálculo debido a introducciónincorrecta de datos
(P–299) – – – – Suma de verificación de parámetrosEn cada operación de salvaguarda (P–052 = 1H) seforma la suma de verificación de los contenidos deparámetros. Esto permite detectar cualquier modifi-cación en los parámetros de máquina.
(P–320) – – – – Diagnóstico origen captador motor, FW 3.00Si aumenta continuamente en varios incrementos,esto significa que hay interferencias altas.Causas posibles:
Pantalla de captador no puesta a tierra
Captador defectuoso
Puesta a tierra de la masa no en orden
Tierra de motor no conectada al módulo HSA
Circuito de medida defectuoso
(P–321) – – – – Diagnóstico origen captador cabezal, FW 3.00Condición: está activado el posicionamiento utili-zando el captador de cabezal; número de rayas decapt. de cabezal en P–131.x es una potencia de 10.Si aumenta continuamente en varios incrementos,esto significa que hay interferencias altas.Causas posibles:
Pantalla de captador no puesta a tierra
Captador defectuoso
Puesta a tierra de la masa no en orden
Tierra de motor no conectada al módulo HSA
Circuito de medida defectuoso
Módulos de cabezal (HS)5.1 Herramientas de diagnóstico
04.97

HS
10.00
HS/5-82 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.4 Hembrillas de medida X1, X2, IR
Función
Datos técnicos
Asignación
Normalización IR
Parametrización X1 (CDA 3), X2 (CDA 4)
La función salida analógica del valor real de la intensidad de fase y de las varia-bles en RAM para fines de medida y de diagnóstico.
Valor real de intensidad de fase en hembrilla IR
2 canales de salida X1 (CDA 3) y X2 (CDA 4)
Margen de tensión 0...+ 5 V (valor 0 corresponde a +2,5 V)
Normalización grosera, compensación de offset para X1 y X2 vía paráme-tros
X1 X2
IR M
X1:
X2:IR:M:
Hembrilla DAU 3
Hembrilla DAU 4Intensidad real fase RMasa de referencia
Figura 5-1 Asignación de las hembrillas de medida
Tabla 5-6 Normalización IR
Parte de potencia Código parte potencia(P–095)
Normalización IR
50 A 6 50 A corresponde a 8,25 V
80 A 7 80 A corresponde a 8,25 V
120 A 8 160 A corresponde a 8,25 V
160 A 9 160 A corresponde a 8,25 V
200 A 10 200 A corresponde a 8,25 V
300 A 11 300 A corresponde a 8,25 V
400 A 12 400 A corresponde a 8,25 V
108 A 13 120 A corresponde a 8,25 V
Sinopsis
Función
Datos técnicos
Asignación
Normalizaciónintensidad defase IR
Módulos de cabezal (HS)5.1 Herramientas de diagnóstico
03.96

HS
10.00
HS/5-83 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-7 Parametrización X1 (CDA 3), X2 (CDA 4)
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–076 – online 4 0...FFFF Hex Dirección CDA 3Dirección de la variable en RAM a sacar vía elCDA 3.Preajustado: |P/Pnom| (dirección RAM: 3050H)
P–077 – online 4 0...15 Dec Factor de decalaje CDA 3Decalaje a la izquierda de los valores selecciona-dos1 corresponde a multiplicación con 2n corresponde a multiplicación con 2n
P–080 – online 4 7F...FF80 Hex Offset CDA 3Compensación de un eventual offset de CDA 3
P–072 – online 4 0...FFFF Hex Dirección CDA 4Preajustado: nreal (dirección RAM: C04H)
P–073 – online 4 0...15 Dec Factor de decalaje CDA 4
P–074 – online 4 7F...FF80 Hex Offset DAU 4
Factor decalaje = 0Factor decalaje = 2
2000H
0,0
+2,5
+5,0
Tensión de salida [V]
0000H 4000H 6000H 8000H A000H C000H E000H FFFFH
1er rebase 2º rebase 3er rebase 4º rebase
Offset = 0 VNormalización fina = 100 %
Valor hexadecimal
Indicación
En el anexo (apt. 6.5) figura una lista de los principales magnitudes de medida(variables en RAM) con sus direcciones.
ParametrizaciónX1 (CDA 3),X2 (CDA 4)
Módulos de cabezal (HS)12.945.1 Herramientas de diagnóstico

HS
10.00
HS/5-84 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.5 Memoria de valores mínimos/máximos
Vigilancia del rebase de umbral mínimo/máximo para las variables en RAM.
Tabla 5-8 Memoria de valores mínimos/máximos
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–181 – online 4 0...FFFF Hex Dirección para memoria mín./máx.Dirección para variables en RAM
P–179 – online 4 0...2 Hex Selección memoria mín./máx.0H: Parada de la función de memoria1H: Arranque de la función de memoria con
evaluación en valor absoluto2H: Arranque de la función de memoria con
evaluación bipolar
(P–182) – – – – Valor mínimo memoria mín./máx.
(P–183) – – – – Valor máximo memoria mín./máx.
Indicación
En el anexo (apt. 6.5) figura una lista de los principales magnitudes de medida(variables en RAM) con sus direcciones.
5.1.6 Función de registro de transitorios
Registro simultáneo de dos variables en RAM y salidas vía hembrillas de me-dida X1 y X2.
Registro en paralelo de dos señales de 16 bits
Profundidad de registro de 640 valores
Período de muestreo 1 ms (P–090, Bit 3=0) ó 0,525 ms (P–090, Bit 3=1, apartir de FW 3.00)
Condición de arranque/parada (condición de disparo)
Salida cíclica vía CDA
Condición de disparo para la salida
Función
Función
Datos técnicos
Módulos de cabezal (HS)5.1 Herramientas de diagnóstico
04.97

HS
10.00
HS/5-85 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-9 Parametrización
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–207 – online 4 0...10 Hex Ajuste registrador de transitorios1H: Arranque por P–206 sin condición de
arranque/parada2H: Condición de arranque P–208 y P–209, sin
condición de parada, arranque por P–2065H: Condición de parada P–210 y P–211, sin
condición de arranque, arranque por P–2066H: Registro con condiciones de arranque/parada4H: Prerregistro en memoria vía P–217
P–212 – online 4 0...FFFF Hex Dirección señal 1En el anexo (apt. 6.5) figura una lista de los princi-pales magnitudes de medida (variables en RAM)con sus direcciones.
P–213 – online 4 0...FFFF Hex Dirección señal 2
P–208 – online 4 0...FFFF Hex Dirección para condición de arranqueDirección de la variable en RAM que lanza el re-gistro
P–209 – online 4 0...FFFF Hex Umbral para condición de arranqueMáscara de condición de arranque que se com-para con la variable en RAM definida en P–208
P–210 – online 4 0...FFFF Hex Dirección para condición de parada
P–211 – online 4 0...FFFF Hex Umbral para condición de parada
P–206 – online 4 0...1 Hex Selección registrador de transitoriosLanzamiento de la función de registro de transito-rios por puesta a 1H.
P–215 – online 4 0...15 Dec Factor de decalaje señal 1v. descripción Hembrillas X1, X2, v. apt. 5.1.4
P–216 – online 4 0...15 Dec Factor de decalaje señal 2
P–217 – online 4 0...FFFF Hex Señal de disparo 1Amplitud de señal disp. “low” para salidas CDA
P–218 – online 4 0...FFFF Hex Señal de disparo 2Amplitud de señal disp. “high” para salidas CDA
P–214 – online 4 0...1 Hex Arranque salida de registroSalida cíclica de valores registrados vía CDASeñal registrada 1 → CDA 3 (X1)Señal registrada 2 → CDA 4 (X2)La asignación precedente de los CDA se con-serva en memoria y se restablece al final de lafunción de salida.
Indicación
En el anexo (apt. 6.5) figura una lista de los principales magnitudes de medida(variables en RAM) con sus direcciones.
Parametrización
Módulos de cabezal (HS)5.1 Herramientas de diagnóstico
07.945.1 Herramientas de diagnóstico

HS
10.00
HS/5-86 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.7 Mando intensidad/frecuencia
Diagnóstico de captadores del motor
Por encima de la velocidad de paso a debilitamiento de campo (P–173), el valorde la intensidad deberá elegirse inferior al valor de la intensidad en vacío yaque si no se activa la limitación de tensión. Esto se traduce en un giro irregulary en golpes de par.La variación de la frecuencia deberá efectuarse lentamente ya que en modoMando I/f existe un cierto riesgo de desenganche del motor.
Tabla 5-10 Mando intensidad/frecuencia
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripción
Mot. 1 Mot. 2tiva
g j p
P–311 – online 4 0,0...100,0 % Intensidad para mando I/f(referida a la intensidad del motor)
P–312 – online 4 0,0...800,0 Hz Frecuencia en mando I/F
P–313 – online 4 0...1Hex Selección mando I/f0H: Mando I/f desactivado1H: Mando I/f activado
Función
Observación
Módulos de cabezal (HS) 07.94
5.1 Herramientas de diagnóstico

HS
10.00
HS/5-87 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.2 Análisis de fallos
5.2.1 Indicación y acuse de fallos
inactivo
= Fallo
= Fallo de posicionamiento
Código de fallo (v. tabla 5-11)
Display
1 fallo
varios fallos, conmutación con
Figura 5-2 Indicación de fallos
por
P
Pulsando la tecla estando bloqueado el regulador.
Si es posible acusar la indicación de fallo, se retorna al programa de servi-cio.
P
Si no es posible acusar la señalización de fallo (la existencia de fallos), laindicación puede inhibirse pasajeramente.
Acuse a distancia
Mando de uno de los bornes siguientes estando bloqueado el regulador:
– Borne “R” (Reset) del módulo NE o del módulo de vigilancia
– Borne “Borrar memoria fallos” del módulo HSA
Desconexión
Apagar el aparato y volverlo a encender 2 s después de la excisión de laindicación.
por
–
–Pulsando la tecla es posible retornar al programa de servicio
durante aprox 1 minuto sin tener que acusar el fallo.
Indicación de fallos
Acuse de fallos
Inhibición de fallos
Módulos de cabezal (HS)07.94
5.2 Análisis de fallos10.94

HS
10.00
HS/5-88 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.2.2 Lista de indicaciones de fallo
Tabla 5-11 Lista de indicaciones de fallo
Códigofallo Fallo Causa Remedio
F–04 Conversión deconsigna errónea
Convertidor A/D (canal de consigna)perturbado
Si aparece repetidas veces, sustituir latarjeta de regulación
F–07 Salvaguarda dedatos en EPROM
Flash fallida
Si esta indicación es repetitiva du-rante la salvaguarda, existe un de-fecto a nivel de la EPROM Flash.
Si esta indicación se presenta inme-diatamente antes de enceder el con-vertidor, este último ha sido apagadodurante la salvaguarda. En este casono se salvaguardan las modificacio-nes de los parámetros. Es necesarioiniciar una nueva salvaguarda.
1. Arrancar de nuevo la salvaguarda dedatos vía P52=1
2. Si aparece de nuevo el fallo F–07, sustituir la tarjeta de regulación
F–08 Pérdida irremedia-ble de datos
EPROM Flash defectuosa Sustituir tarjeta de regulación
F–09 Fallo del sistemacaptador 1 (cap-
tador motor)
Captador de motor no conectado odefectuoso
Cable de captador de motor
Circuito de medida 1 (valor real de ve-locidad) defectuoso, mal enchufado omal configurado (P–150)
A partir de FW2.00, la indicación de fallopuede inhibirse por intermedio del bit 1 deP–090.
Controlar cable captador/pantalla o
Sustituir captador en motor o
Sustituir tarjeta de regulación
F–10 FalloEquipamiento
Parametrizacióndel sistema capta-
dor 2 (capta-dor cabezal)
Selección de posicionamiento concaptador de cabezal (P141=1,P143=1), variante de módulo errónea,FW 1/2
Seleccionado posicionamiento concaptador de cabezal (P141=1,P143=1), en X432 no está enchufadoningún captador de cabezal, FW 3.00
Seleccionado posicionamiento concaptador de cabezal (P141=1,P143=1) y salida de las señales decaptador de motor X432 con forma deonda rectangular (P033<>0), FW 3.00
Seleccionada salida de señales decaptador de motor en forma rectangu-lar en X432 (P033<>0), en X432 estáenchufado un captador de cabezal,FW 3.00
Adaptar correctamente P33 (v. In-strucciones de puesta en marcha,apt. 3.3.4)
Sustituir la variante de tarjeta de regu-lación correcta
Conectar el captador de cabezal
Módulos de cabezal (HS)5.2 Análisis de fallos

HS
10.00
HS/5-89 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5–11 Lista de indicaciones de fallo
Códigofallo
Fallo Causa Remedio
F–11 El regulador develocidad estáen tope, falta
señal de veloci-dad real
Motor sobrecargado
Embarrado del circuito intermedio no co-nectado
Fusible del circuito intermedio defectuoso
Transistor defectuoso en módulo de partede potencia
Captador de motor no conectado
Cable de captador de motor defectuoso
Captador de motor defectuoso
Conductor de tierra del motor no conec-tado
Pantalla del cable de captador del motorno conectado
Motor no conectado o falta fase
Motor bloqueado
Circuito de medida 1 (valor real de veloci-dad) defectuoso o no conectado correc-tamente
(La temporización puede ajustarse conP–248)
Evitar la sobrecarga del motor(P004<100%)
Apretar los tornillos de conexión delas barras del circuito intermedio
Sustituir la parte de potencia
Conectar el captador de motor
Cambiar el captador de motor
Asegurar conexión PE/motor
Poner a tierra pantalla o sustituir ca-ble a captador
Conectar el motor con secuencia defases correcta
Eliminar el bloqueo mecánico
El contactor entre motor y convertidordebe estar cerrado
Sustituir la tarjeta de regulación
F–14 Sobrecalenta-miento del mo-
tor
Motor sobrecargado
Intensidad de motor demasiado grande,p. ej. por falso ajuste del código enP–096
Sonda de temperatura defectuosa (mo-tor)
Ventilador de motor defectuoso
Circuito de medida 1 (valor real de veloci-dad motor) defectuoso
Cortocircuito de espiras en el motor
Reducir la carga del motor
Ajustar correctamente datos del mo-tor
Conmutar a la segunda sonda detemperatura
Conectar ventilador
Cambiar tarjeta de regulación o cap-tador del motor
Cambiar el motor
F–15 Sobrecalenta-miento converti-
dor
Convertidor sobrecargado (correspon-dencia motor/módulo convertidor errónea,ciclo de carga erróneo)
Temperatura ambiente excesiva
Ventilador averiado
Frecuencia de reloj de ondulador superiora 3,2 kHz–1541
Sonda de termperatura defectuosa
Acuse: solamente tras enfriamiento bajo 50
C15 K por desconexión y reconexión de latensión de red.
Corregir correspondencia motor/con-vertidor (P95/96). Reducir límite deMd (P39)
Parte de potencia dimensionada insu-ficientemente
Cambiar parte de potencia
Reducir frecuencia de reloj
F–16 Código de partede potencia in-
admisible
Seleccionado código 3 erróneo en P–095(en caso de partes de potencia sin reco-nocimiento automático)
Seleccionado código erróneao en P–095(en caso de partes de potencia con reco-nocimiento automático), a partir de FW3.00
Cargar el código correcto
Módulos de cabezal (HS)07.945.2 Análisis de fallos
07.9407.9407.94

HS
10.00
HS/5-90 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Códigofallo
Fallo Causa Remedio
F–17 I0 mot > Inomparte de poten-
cia
Correspondencia motor/módulo converti-dor errónea
Ajustar correctamente Io del motor o
Utilizar una parte de potencia mayor
F–18 Fallo sistemacaptador 2
(captador encabezal)
Captador en cabezal no conectado o defectuoso FW 3.00
Circuito de medida 2 defectuoso FW 3.00
Cable captador cabezal defectuoso FW 3.00
Este aviso de fallo puede inhibirse medianteP–090, bit 5.
Conectar o cambiar captador en ca-bezal
Controlar cable de conexión captador/convertidor
Sustituir la tarjeta de regulación
F–19 Sonda de tem-peratura
Rotura decable
Cortocir-cuito
Sonda de temperatura defectuosa (termi-stor PTC a 20 °C 600 Ω)(utilizar eventualmente la segunda sondaPTC del motor)
Conexión a la sonda interrumpida
Circuito de medida 1 defectuoso
Acuse: sólo por desconexión y reconexión dela tensión de red.
Sustituir la sonda de temperatura
Restablecer la conexión sonda detemperatura motor/convertidor
Sustituir la tarjeta de regulación
F–61 Frequ. máx.motor sobrepa-
sada
Número de rayas (P–098) ajustadoerróneamente, FW 2.00
Maestro/esclavo sin unión por adherencia
Ajustar correctamente número derayas captador (P98)
Restablecer la unión mecánica poradherencia (accionamiento esclavo)
F–79 Interrupción pordivisión (esta in-dicación puedeinhibirse acti-vando el bit 11
de P–053)
Datos de motor erróneos en P–159 aP–176 ó P–219 a P–236
Debilitamiento del campo > 1:16
Ajustar correctamente los datos delmotor
Debilitamiento del campo < 1:16
FP–01 Consigna >Número derayas (imp/
vuelta) del cap-tador
Consigna excesiva (P–121 a P–125,P–131). Consigna de posición externa
Es necesario ajustar una consignamenor (máx. P131)
FP–02 Entrada en ac-ción de vigilan-cia de origen
No hay señal de origen de captador o dedetector de proximidad BERO
Parametrización incorrecta (P–131)
Aproxima más el Bero o sustituir elBero
Cambiar el cableado
Cambiar el captador
Ajuste en P131 es mayor que elnúmero de rayas por vuelta
FP–03 Decalaje de ori-gen > núm. derayas captad.
Valor en P–130 número de rayas (im-pulsos/vuelta) en P–131
El valor en P–130 debe ajustarse inferior al valor en P–131
Módulos de cabezal (HS)5.2 Análisis de fallos
07.945.2 Análisis de fallos

HS
10.00
HS/5-91 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Códigofallo
RemedioCausaFallo
FP–04 No hay origenválido
Ausencia de origen válido al posicionarP–129=1, p. ej. tras la puesta en marcha
tras un cambio de escalón de reducción
Girar como mínimo una vuelta (3600)el cabezal y ajustar nuevamente P129=1. Si aparece de nuevo el fallo, controlar el origen o marca cero
Si se utiliza un Bero, reajustar su separación; controlar el cableado o sustituir el Bero
En caso de captador cabezal/motor, controlar el cableado o sustituir el captador
F–60 Compensaciónde decalajes depotencia
Falta desbloqueo de impulsos y/o reguladores
Transmitir desbloqueo de impulsos ydesbloqueo de regulador. Sólo enton-ces se puede iniciar el ajuste.
(a partir de FW 2.40)
Módulos de cabezal (HS)5.2 Análisis de fallos

HS
10.00
HS/5-92 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
tras
Red ON (puesta bajo tensión)
Indicación de estado inactiva
– Corte de al menos dos fases (módulo NE)
– Fusión de al menos dos fusibles de entrada (módulo NE)
– Fallo de alimentación de electrónica en módulo NE
– Enlace de bus interno (cable plano) entre módulo HSA y módulo NE noestablecido (cable no enchufado o defectuoso)
– Módulo HSA defectuoso
– EPROM/EPROM Flash defectuosa
– Ningún firmware válido cargado, indicación en el display: “– – – – – –” oERROR?1786
Desbloqueo del regulador
Para ncons > 30 r/min, el motor gira como máximo a 30 r/min y parancons 30 r/min, el motor oscila (a pesar de que no se ha seleccionado lafunción de oscilación)
– Campo giratorio en sentido erróneo, debido a cruzamiento de dos fases(permutar la conexión de dos fases).
– Se ha ajustado un número de rayas (impulsos/vuelta) del captador delmotor excesivo.
Motor parado a pesar de que la consigna de velocidad es diferente de 0
– Función oscilación seleccionada (P–154, P–155=0)
– Borne 81 no seleccionado
– Número de función 16 (desbloqueo de consigna) programado pero noseleccionado
Ligero movimiento del motor
– Parte de potencia defectuosa
Motor acelera a velocidad de giro elevada
– Cantidad de líneas demasiado pequeña
Posicionamiento ON
Accionamiento gira con velocidad de giro de búsqueda y no posiciona
– Cantidad de líneas entre dos marcas cero demasiado grande
Fallos
Módulos de cabezal (HS)5.2 Análisis de fallos

HS
10.00
HS/6-93 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Anexo
Módulos de cabezal (HS)6 Anexo
6
07.94

HS
10.00
HS/6-94 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.1 Diagrama de flujo para puesta en marcha abreviada
Precaución
Si se acusa un fallo presente en el módulo NE estando desbloqueado elmódulo HSA, el accionamiento acelera hasta ncons.
Indicación
Si se produce un corte de red durante la salvaguarda, los valores modificadosdesde la primera salvaguarda se pierden y, al restablecerse la tensión, el con-vertidor señaliza el fallo “F–07”. Tras acusar la señalización de fallo “F–07”(v. apt. 5.2.2), pueden ajustarse de nuevo los valores de los parámetros.
START
Encender el equipoconvertidor (red ON)
síFallo
¿Displayaún
inactivo?
no
Antes de encender el equipo convertidor:
Verificar las conexiones con ayuda del esquema de conexiones
Desactivar o anular por desconexión el desbloqueo de impulsos yde reguladores (bornes 663 y 65).
Determinar el código del motor y de la parte de potencia a partir dela referencia del motor y del módulo (lista: v. tablas 6-1 a 6-5).
sí Fallo(v. apt. 5.2.2)
1 2
no
sí
Visualizaciónde “P–000”
(v. apt. 2.2.1)
no
¿“F–...”intermitente?
Módulos de cabezal (HS)6.1 Diagrama de flujo para puesta en marcha abreviada
07.94

HS
10.00
HS/6-95 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1 2
sí
Ajustar P–051 a 4H(supresión de la prot. de escritura)
Ajustar P–097 a 0H(lanzar inicialización)
Ajustar P–052 a 1H(escritura en EPROM Flash)
Esperar a la puesta a 0H de P–052,después apagar el convertidor y vol-verlo a encender 2 s después de quese apague la visualización de estado.
El módulo ya ha sido puestoen marcha. Para adaptarlo aun nuevo motor, es necesarioen primer lugar reinicializarlo.
Indicación de “P–095” ó “P–096”
P–095: Entrar código parte potenciao controlarlo
P–096: Entrar código motorP–098: Entrar el número de im-
pulsos/vuelta del captadordel motor
Ajustar P–097 a 1HSe visualiza “SEtUP”
Esperar a que se apague la vi-sualización de estado P–000
(v. apt. 2.2.1)
no
Ajustar P–051 a 10H(supresión de la prot. de escritura)
Entrar P–159 a P–176
Ajustar P–177 a 1H (calcular datos demotor). Esperar a que P–177 retome elvalor 0H.
Ajustar P–051 a 4H.
Ajustar P–052 a 1H.
Esperar a la puesta a 0H de P–052. Losparámetros del motor se transfieren a laEPROM Flash.
Ajustar P–051 a 4H.
3
¿Se usa un motor espe-cial para el que no hayprevisto ningún código
(P–096)?
Módulos de cabezal (HS)6.1 Diagrama de flujo para puesta en marcha abreviada
04.9704.97

HS
10.00
HS/6-96 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3
Verificar y, dado el caso, modificar los parámetros siguientes:
P–014 Normalización ncons
P–015 Corrección offset nconsP–024 Normalización ncons
P–016 T. aceleración g. rampasP–017 T. deceleración g. rampas
P–029 Velocidad máx. motor nmáxMot
P–021 a P–023, Umbral de conmutación de losP–027 relés de vigilancia de velocidad
P–039 a P–043 Límites de parP–047 a P–050
P–081 a P–089 Funciones debornes programables
P–185 a P–194, Funciones deP–241 a P–246 relés programablesP–180 en motor Y/∆
¿Valoresmodificados?
Ajustar P–052 a 1H
Esperar la puesta a 0H de P–052. Losvalores modificados se transfieren ala EPROM Flash.
4
no
sí
Módulos de cabezal (HS)6.1 Diagrama de flujo para puesta en marcha abreviada
07.94

HS
10.00
HS/6-97 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4
Todos los desbloqueos están ausentesen módulos NE y HSA.
Aplicar tensión de desbloqueo enmódulo NE.
Aplicar tens. de desbloqueo al B.663del módulo HSA (desbloqueo de imp.de eje).
Aplicar tens. de desbloqueo al B.65del módulo HSA (desbloqueo de regu-ladores)
Aplicar cons. de velocidad a los B.56y B.14 y ajustarla a 0 V (indicacióncon P–001).
¿Fcn. B.16 (desblo-queo consigna) se-
leccionaday no activada?
Suprimir paro rápido delg. rampas (B.81).
Suprimir paro rápido delg. rampas (B.81).
síno
Desbloquear la consigna por elborne programable
Aumentar ligeramente la consigna de velocidad. Si se genera laindicación de fallo F-11, la velocidad real es errónea o el motorno ha sido conectado correctamente. Si el motor oscila, o eserrónea la secuencia de fases en el motor o se ha seleccionadoOscilación.
5
Estado de los dos indicadores cen-trales de la visualiz. de estado“P–000” (v. apt. 2.2.1)
Módulos de cabezal (HS)6.1 Diagrama de flujo para puesta en marcha abreviada
07.94

HS
10.00
HS/6-98 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5
Desactivar el g. rampas con ayuda del borne 62(TH = 0), si este borne ha sido parametrizado.
Optimizar el regulador de velocidad con ayuda deP–031 y P–032.
Reajustar, dado el caso, los límites o los umbralesde conmutación de los relés.
¿Valoresmodificados?
sí
Ajustar P–052 a 1H.
Esperar a que retorne a 0H P–052.Los valores modificados se transfieren a laEPROM Flash.
Tras la puesta en marcha, salvaguardar los va-lores de parámetros en un fichero o documen-tarlos en la lista.
Ajustar P–051 a 0H.
Fin
no
Módulos de cabezal (HS)6.1 Diagrama de flujo para puesta en marcha abreviada
07.94

HS
10.00
HS/6-99 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.2 Códigos para partes de potencia y motores estándar
Tabla 6-1 Códigos de partes de potencia
Tipopartepot.
Referencia6SN1123–1AA06SN1124–1AA06SN1135–1BA1
Intensidadnom. salida
[A]
Intensidad punta de sa-lida, breve duraciónS6–40 % 10 min [A]
Intensidad punta de sa-lida, breve duración
S6–40 %. 10 s [A]
Código partepotencia
P–095
50 A –0CA 24 32 32 6
80 A –0DA 30 40 51 7
108 A –0LA 45 60 76 13 FW 2.40
120 A –0GA 45 60 76 8
160 A –0EA 60 80 102 9
200 A –0FA 85 110 127 10
300 A –0JA 120 150 193 11 FW 2.00
400 A –0KA 200 250 257 12 FW 2.00
Tabla 6-2 Códigos de motores
Ref. motortrifásico 1PH6...
Potencianom. motor
[kW]
Intensidadnom. motor
[A]
Intensidad envacío motor
[A]
Velocidad no-minal
[r/min]
Velocidadmáx.
[r/min]
Código delmotorP–096
101–NF4101–NG4103–NF4103–NG4105–NF4105–NG4105–NZ4107–NC4107–NF4107–NG4
3,74,75,57,07,59,512,05,09,011,5
12,513,717,919,422,525,327,022,726,929,8
6,26,99,19,911,513,115,611,714,215,6
150020001500200015002000300075015002000
9000
101102103104105106140131107108
131–NF4131–NG4131–NZ0133–NB4133–NF0133–NF4133–NG0133–NG4135–NF0135–NF4135–NG4137–NB4137–NF4137–NG0137–NG4137–NZ4138–NF0138–NF4138–NG4
9,012,08,04,511,011,014,514,515,015,020,07,918,524,024,011,022,022,028,0
27,232,123,226,026,731,331,537,535,041,350,643,650,250,057,841,851,561,066,1
11,713,610,99,811,513,414,516,116,118,822,818,622,923,226,518,024,628,731,4
1500200015005251500150020002000150015002000525150020002000750150015002000
8000
109110141 FW 2.00132111112136113114115116133117137118143 FW 3.00119120121
Módulos de cabezal (HS)6.2 Códigos para partes de potencia y motores estándar
10.0004.97

HS
10.00
HS/6-100 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-2 Códigos de motores
Ref. motortrifásico 1PH6...
Código delmotorP–096
Velocidadmáx.
[r/min]
Velocidad no-minal
[r/min]
Intensidad envacío motor
[A]
Intensidadnom. motor
[A]
Potencianom. motor
[kW]
161–NF0161–NF4161–NG4163–NB4163–NF0163–NF4163–NG4163–NZ0167–NB4167–NF0167–NF4167–NG0167–NG4168–NF0
22,022,028,011,530,030,038,019,014,537,037,045,045,040,0
53,560,868,166,272,586,084,056,078,079,695,783,391,084,0
23,926,931,327,833,340,337,525,234,436,343,532,241,038,0
15001500200050015001500200095050015001500200020001500
6500
122123124134125126127139135128129138130142 FW 2.00
186–NB4186–NB9
26,830,8
66,067,0
35,535,0
610700
6100161167
186–NB4186–NE4186–NF4206–NB4206–NE4206–NF4226–NF4
22,042,050,032,063,076,0100,0
66,086,0100,096,0125,0149,0192,0
35,546,052,048,064,068,079,0
50012501500500125015001500
5000
160163164162165166168 FW 2.00
Ref. motortrifásico 1PH7...
Potencianom. motor
[kW]
Intensidadnom. motor
[A]
Intensidad envacío motor
[A]
Velocidad no-minal
[r/min]
Velocidadmáx.
[r/min]
Código delmotorP–096
101–xNF4103–xNF4105–xNF4107–xNF4131–xNF4133–xND4133–xND4137–xND4137–xNG4163–xND4163–xNF4167–xNF4184–2NE184–2NB184–xNTx186–2NE186–2NB186–xNTx224–2NF224–2NC
3,77791112201728223037
40,022,021,560,029,629,6100,055,0
8,916,216,420,823,12843
40,758,652,770,377,885,054,076
120,075,0106
188,0117,0
4,827,848,369,918,3612,717,418,521,424,130,131,946,234,740
63,042,556
73,063,5
150020001500150015001000200010002000100015001500125050050012505005001500700
90009000900090008000800080008000800065006500650050005000500050005000500045004500
400 FW 3.00402 FW 3.00403 FW 3.00404 FW 3.00406 FW 3.00408 FW 3.00409 FW 3.00411 FW 3.00412 FW 3.00414 FW 3.00415 FW 3.00417 FW 3.00418 FW 2.40419 FW 2.40424 FW 3.00420 FW 2.40425 FW 3.00421 FW 2.40422 FW 2.40423 FW 2.40
101–NF 3,7 9,8 5,9 1500 9000 426 FW 3.1
103–NG 7 17,1 8,3 2000 9000 427 FW 3.1
105–2NF 7 17,4 9,4 1500 9000 428 FW 3.1
107–NF 9 22,5 11 1500 9000 429 FW 3.1
Módulos de cabezal (HS)6.2 Códigos para partes de potencia y motores estándar
10.00

HS
10.00
HS/6-101 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-3 Motores estrella/triángulo
Ref. motoresY/∆ 1PH6...
Potencianom. motor
[kW]
Intensidadnom. motor
[A] Y/
Intensidad envacío motor
[A] Y/
Velocidad no-minal
[r/min]
Velocidadmáx.
[r/min]
Código delmotor P–096
133–4NB8137–4NB8
4,37,5
15,3/13,525,2/22,5
6,4/8,011,7/13,5
525/1250525/1250
8000200202
163–4NB8167–4NB8
11,514,5
39,5/35,245,5/40,5
14,3/20,817,9/23,2
500/1250550/1250
6500204206
186–4NB8206–4NB8226–4NB8
22,032,042,0
55,0/50,076,0/73,094,0/88,0
31,0/35,038,0/49,056,0/55,0
500/1250500/1250500/1250
5000208210214 FW 2.00
Tabla 6-4 Motores refrigerados por agua
Ref. motortrifásico1PH4...
Potencianom. motor
[kW]
Intensidadnom. motor
[A]
Intensidad envacío motor
[A]
Velocidad no-minal
[r/min]
Velocidadmáx.
[1/min]
Código delmotor P–096
103–4NG6 8,5 36,4 17,7 2000 18000 301
105–4NG6 12,0 51,3 24,4 2000 17000 303
107–4NG6133–4NF6
16,014,0
55,555,9
26,921,4
20001500
16000305307
135–4NF6 20,0 76,6 29,7 1500 15000 309
137–4NF6 25,0 92,8 35,9 1500 14000 311
138–4NF6 28,0 102,2 40,0 1500 13000 313
163–4ND6 25,0 103,8 42,4 1000 12000 315
167–4ND6 31,0 129,4 50,7 1000 11000 317
168–4ND6 35,0 143,9 58,6 1000 10000 319
103–4NF2105–4NF2107–4NF2
7,511,014,0
25,236,645,0
11,516,419,0
150015001500
9000300302304
133–4NF2135–4NF2137–4NF2138–4NF2
15,022,027,030,0
53,170,781,997,3
17,425,530,333,8
1500150015001500
8000
306308310312
163–4NF2167–4NF2168–4NF2
37,046,052,0
103,0115,0143,0
44,049,258,8
150015001500
6500314316318
Módulos de cabezal (HS)6.2 Códigos para partes de potencia y motores estándar
07.94

HS
10.00
HS/6-102 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-5 Motores para incorporar
Ref. motortrifásico1PH2...
Potencianom. motor
[kW]
Intensidadnom. motor
[A]
Intensidad envacío motor
[A]
Velocidad no-minal
[r/min]
Velocidadmáx.
[r/min]
Código delmotor P–096
092–4WG4096–4WG4
4,710,0
20,641,6
10,621,5
20002000
18000326327
123–4WF4127–4WF4128–4WF4
11,521,025,0
54,580,897,1
21,133,437,4
150015001500
16000328329330
143–4WF4147–4WF4
30,038,0
96,5111,3
41,843,7
15001500
12000331332
093–6WF4095–6WF4113–6WF4115–6WF4117–6WF4118–6WF4
7,510,015,016,518,023,0
23,128,453,352,758,978,9
10,913,621,821,924,732,8
150015001500150015001500
10000
320321322323324325
182–6WC4184–6WP4186–6WB4
11,814,518,3
37,056,062,5
17,025,731,0
750600525
8000333 FW 2.00334 FW 2.00335 FW 2.00
188–6WB4254–6WB4
23,628,8
78,0118,0
38,042,0
500500
6000336 FW 2.00337 FW 2.00
256–6WB4 39,3 119,0 54,0 500 4000 338 FW 2.00
Nº rayas del sist. de medida 256 ó 512 según captador corona dentada utiliz.
Módulos de cabezal (HS)6.2 Códigos para partes de potencia y motores estándar
12.94

HS
07.94
HS/6-103 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.3 Conexiones
Esquema de conexión
Bornes de conexión
Bornes de relé
Conmutación estrella/triángulo
Precaución
Las pantallas de los cables y los hilos no utilizados en cables de energía (p. ej.hilos para mando de freno) deberán contactarse con el potencial PE para deri-var eventuales cargas generadas por acoplamiento capacitivo.
Si no se toman estas precauciones pueden aparecer tensiones de contactocon peligro de muerte.
Nota: Si se utilizan circuitos que no tienen pequeña tensión de seguridad (PELV),en los bornes AS1 y AS2 es necesario evitar enchufar un conector correcto to-mando la precaución de codificar el conector adecuadamente (v. EN 60204–1,apt. 6.4).Referencias de los conectores codificados, v. Catálogo NC 60.1.
Sinopsis
6.3 ConexionesMódulos de cabezal (HS)04.97

HS
07.94
HS/6-104 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
PE2
X432 Entrada BEROEntrada captador cabezalSalida captador cabezal
PE1 W2V2U2
P 600
M 600
Circuito intermedio
Bus interno
X412Captadormotor
X411InterfaseRS232C
externo X431
X421
ncons2
ncons1M
M
X451
CDA 2
CDA 1
X441IFRFHSS
interno
Precaución Si entre el motor y el módulo HSA está intercalado un contactor de potencia, esnecesario asegurarse de que dicho contactor sólo se maniobre en vacío (supri-mir primero los impulsos (B.663), y abrir 40 ms después el contactor).
663
A91
A92
561424
8
6581
E1E2E3E4
E5E6E7E8E9
9
289A11A21A31A41A51A61672
673674
AS1AS2
Contacto señal.Bloqueo anti-arranque
Listo
Relé 11)
Relé 21)
Relé 31)
Relé 41)
Relé 51)
Relé 61)
B.11)
B.21)
B.31)
B.41)
B.51)
B.61)
B.71)
B.81)
B.91)
FR+
Módulo HSAMódulo NE
X111
X121
P5002U11U12V11V12W11W1
74
73.273.1
72
5.35.25.1639
6419
9
74544101515R
911248111
113
AS1AS2
NS1NS2
W1V1U1 X13
1
X35
1
X15
1
X35
1
PE1
X141
X161
X171
X172
X181
SeñalizaciónListo
Señ. agrupadavigilancia I2t,temperatura
Desbloqueo im-puls.
Desblo. accio-namto.
FR+
FR–
P24P15N15N24MMRESETFR+
Mando contactor
SPPEXT
5 VUNITUZK>>
M500
Fallo
a
de CN
M3 G SG
PE
FNL1L2L3
LK
externo Módulointerno
externo
Módulointerno
Preparación
213
Contacto señal.Bloqueoantiarranque
M
X2X1
IR
FR+
Contacto de señal.Contactor red
X433Entrada Bero2)
Figura 6-1 Esquema de conexión
1) Entradas y salidas programables2) a partir de ref. 6SN1121–0BA11–0AA1
Esquema de conexiónSIMODRIVE 611 Sistema analógico
6.3 ConexionesMódulos de cabezal (HS) 04.97

HS
07.94
HS/6-105 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-6 Bornes de conexión
Nºborne
Designa-ción
FunciónTipo
1)Tensión típ./lími-
tesSección máx.
U2V2W2
Conexión de motor A 3AC 0...450 V según Instrucciones para proyecto
PE1PE2
Conductor de protecciónConductor de protección
EA
0 V0 V
TornilloTornillo
P600M600
X151/351
CICI
Bus interno
E/AE/A
E/A
+300 V–300 V
diversas
BarraBarra
Cable plano
5614248
X421X421X421X421
Consigna de velocidad 1(entrada diferencial)Consigna de velocidad 2(entrada diferencial)Consigna de velocidad deleje C o adicional
EEEE
10 V/0,5mA(máx. 11 V)10 V/0,5mA(máx. 11 V)
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
6636581E1E2E3E4E5E6E7E8E993)
X431X431X431X431X431X431X431X431X431X431X431X431X431
Desbl. imp. específ. de ejeDesbloqueo reguladorParo rápido del g. de rampasBorne programable 12)
Borne programable 22)
Borne programable 32)
Borne programable 42)
Borne programable 52)
Borne programable 62)
Borne programable 72)
Borne programable 82)
Borne programable 92)
Tensión desbloqueo
EEEEEEEEEEEEA
+21V...+33V+13V...+30V+13V...+30V+13V...+30V+13V...+30V+13V...+30V+13V...+30V+13V...+30V+13V...+30V+13V...+30V+13V...+30V+13V...+30V+24V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
A91MA92M
X451X451X451X451
Salida analógica CDA1Potencial de ref. para CDA1Salida analógica CDA2Potencial de ref. para CDA2
AAAA
10 V 3 mA0 V10 V 3 mA0 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
X1X2IRM
HembrillaHembrillaHembrillaHembrilla
AAAA
0 V...5 V 3 mA0 V...5 V 3 mA10 V 3 mA0 V
Hembrilla ∅ 2 mmHembrilla ∅ 2 mmHembrilla ∅ 2 mmHembrilla ∅ 2 mm
1) E = Entrada, A = Salida2) programable vía parámetros de manejo3) v. apts. 3.1...3.2
Bornes deconexión
6.3 ConexionesMódulos de cabezal (HS)04.97

HS
07.94
HS/6-106 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-7 Bornes de relé
Nºborne
Designa-ción
FunciónTipo
1) Tensión típ./límites Sección máx.
289
A11A21A31A41A51)
A61
672673674
X441
X441X441X441X441X441X441
X441X441X441
Común señalizaciones
Función de relé programable 12)
Función de relé programable 22)
Función de relé programable 32)
Función de relé programable 42)
Función de relé programable 52)
Función de relé programable 62)
Listo/no hay fallo es-pecífico de ejes
E
SSSSSS
SEÖ
30 V/6,0 A máx.3)
30 V/1,0 A máx.30 V/1,0 A máx.30 V/1,0 A máx.30 V/1,0 A máx.30 V/1,0 A máx.30 V/1,0 A máx.
30 V/1,0 A máx.30 V/1,0 A máx.30 V/1,0 A máx.
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
AS 1AS 2
X441X441
Contacto señalizaciónBloqueo antiarranque
EÖ
250 VAC/1 A, 30 VDC/2 A
1,5 mm2
1,5 mm2
1) E = Entrada, Ö = Contacto NC, S = Contacto NA
2) programable vía parámetros de manejo
3) Si se utilizan varios relés, la intensidad total no deberá sobrepasar 6 A.
Bornes de relé
6.3 ConexionesMódulos de cabezal (HS) 10.94

HS
07.94
HS/6-107 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Los motores con conmutación estrella/triángulo permiten el funcionamiento apotencia constante en un gran margen de velocidad. A bajas velocidades, elmotor está conectado en estrella (par elevado) y, a altas velocidades, entriángulo (par de desenganche elevado). Es posible conmutar incluso con elmotor girando. La orden de conmutación (estrella/triángulo) debe prescribirsedesde el exterior (como un cambio de escalón de reducción).
B. An2)B. An2)
SIMODRIVE 611 Sistema analógico
Módulo de cabezal (HSA)
V2U2 W2
Salidas de reléseleccionables2)
B.663 B.289PE
K2h
K2
K1Kx3)
K2 K1
K1 Y
K1h
1PH
Y/
K1 K2
U2V1 W1 V2 W2U2
V2W2
ConmutaciónY/
Desbloqueoimpulsos
de CN/PLC
K2hK1h
K2
U1
Alimentación con-tactor auxiliarmáx. 30 V DC
Kx3)
B. En1)
Figura 6-2 Esquema de conexión para conmutación Y/∆
1) Borne de entrada seleccionable: uno de los bornes B.E1 a B.E9.
2) Dos salidas de relé seleccionables: a elección, bornes B.A11 a B.A61.
3) La mera apertura de K1 y K2 no garantiza la parada segura del motor.Por ello, y por motivos de seguridad, es necesario prever una separación galvánica con ayuda del contactor Kx.Este último sólo puede maniobrarse en vacío, es decir, es necesario suprimir los impulsos 40 ms antes deabrir el contactor.
Conmutaciónestrella/triángulo
6.3 ConexionesMódulos de cabezal (HS)07.94

HS
07.94
HS/6-108 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.4 Ocupación de conectores
Ocupación del conector X412 y del conector del motor
Ocupación del conector X432 para captador cabezal
Ocupación del conector X432 para BERO
Ocupación del conector X432 para salida señales captador motor a CN
X412: hembra Sub-D, 15 polos, inmovilización por correderaConector motor: macho redondo, 17 polos
A observar: Enchufar y desenchufar sólo con el equipo sin tensión.
Tabla 6-8 Ocupación conector: Señales captador motor
Nombre de la señal X412/Nº PIN Conector motor/Nº PIN
P-Encoder 1 10
M-Encoder 2 7
A 3 1
A 4 2
inside shield 5 17
B 6 11
B 7 12
5 V Sense 9 16
R 10 3
0 V Sense 11 15
R 12 13
+ Temp 14 8
– Temp 15 9
1
23
4
5678
9
1011
12
1713
1415
16
Pantalla externa contactada con la carcasa del conector.
Sinopsis
Ocupación del co-nector X412 y delconector del motor
Módulos de cabezal (HS)6.4 Ocupación de conectores
07.94
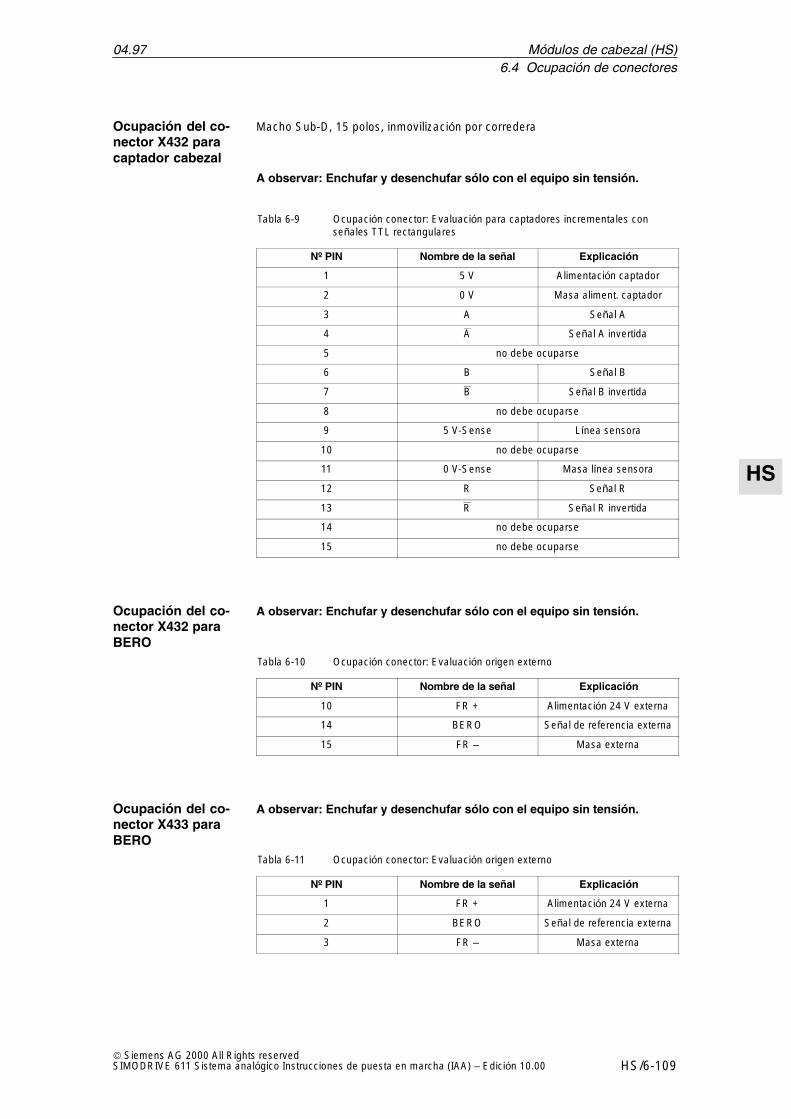
HS
07.94
HS/6-109 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Macho Sub-D, 15 polos, inmovilización por corredera
A observar: Enchufar y desenchufar sólo con el equipo sin tensión.
Tabla 6-9 Ocupación conector: Evaluación para captadores incrementales conseñales TTL rectangulares
Nº PIN Nombre de la señal Explicación
1 5 V Alimentación captador
2 0 V Masa aliment. captador
3 A Señal A
4 A Señal A invertida
5 no debe ocuparse
6 B Señal B
7 B Señal B invertida
8 no debe ocuparse
9 5 V-Sense Línea sensora
10 no debe ocuparse
11 0 V-Sense Masa línea sensora
12 R Señal R
13 R Señal R invertida
14 no debe ocuparse
15 no debe ocuparse
A observar: Enchufar y desenchufar sólo con el equipo sin tensión.
Tabla 6-10 Ocupación conector: Evaluación origen externo
Nº PIN Nombre de la señal Explicación
10 FR + Alimentación 24 V externa
14 BERO Señal de referencia externa
15 FR – Masa externa
A observar: Enchufar y desenchufar sólo con el equipo sin tensión.
Tabla 6-11 Ocupación conector: Evaluación origen externo
Nº PIN Nombre de la señal Explicación
1 FR + Alimentación 24 V externa
2 BERO Señal de referencia externa
3 FR – Masa externa
Ocupación del co-nector X432 paracaptador cabezal
Ocupación del co-nector X432 paraBERO
Ocupación del co-nector X433 paraBERO
Módulos de cabezal (HS)6.4 Ocupación de conectores
04.97

HS
07.94
HS/6-110 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
A observar: Enchufar y desenchufar sólo con el equipo sin tensión.
Tabla 6-12 Ocupación conector: Salida señales captador motor con señales TTLrectangulares
Nº PIN Nombre de la señal Explicación
1 no debe ocuparse
2 0V Masa alim. captador
3 A Señal A
4 A Señal A invertida
5 no debe ocuparse
6 B Señal B
7 B Señal B invertida
8 no debe ocuparse
9 no debe ocuparse
10 no debe ocuparse
11 no debe ocuparse
12 R Señal R
13 R Señal R invertida
14 no debe ocuparse
15 no debe ocuparse
Ocupación del co-nector X432 parasalida señales cap-tador motor a CN
Módulos de cabezal (HS)6.4 Ocupación de conectores
07.94

HS
07.94
HS/6-111 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Conector X432
A
B
R1
R2
R3
a
td
tdtd
td
tdtd
Figura 6-3 X432: Señales de salida para CN
R1: Factor multiplicador 1 y 0,5
R2: Factor multiplicador 2
R3: Factor multiplicador 4
Señales incrementales: Trenes de impulsos rectangulares TTL A y By sus invertidos A y B. Con giro horario, B sigue a A.
Separación de flancos: a ≥ 200 ns, si no se sobrepasa la frecuenciade entrada máx. permitida de la señal del captador
Señal de referencia: Un impulso rectangular R por vuelta mecánicay su impulso invertido R.
Retardo: |td| ≥ 50 ns
Cargabilidad: –IaHigh ≥ 20 mA
IaLow ≥ 20 mA
Ccarga ≥ 1000 pF
Nivel: Salida abierta (internamente 270 Ω) 3.5 V,con una resistencia terminal mín. de 60 Ω en total: 2.5 V. Más detalles figuran en la descripción de lainterfase RS422A.
Módulos de cabezal (HS)6.4 Ocupación de conectores
07.94

HS
07.94
HS/6-112 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.5 Direcciones de variables en RAM
Regla para todas las direcciones: dirección de segmento = 0H
Tabla 6-13 Dirección de las variables en RAM
VariableDir. High
Dir. Low
Valorcorres-ponde a
Tiempo de actua-lización cíclica
Consigna velocidad 0C02H 0C00H 10 0000H nnom. Frecuencia de re-gulador de veloci
Valor real de velocidad 0C06H 0C04H 10 0000H nnom.gulador de veloci-dad de giro como
Valor real abs. de velocidad (1 ms) – 1402H 1 000H nnom.
dad de giro comoparametrizada en
P 090Diferencia consigna–vel. real 0C0AH 0C08H 10 000H nnom.
P-090
Consigna de par del reg. de n – 0C66H Adr. 0F52H Mdnom.
Consigna de par para conv. K/P – 0C6CH Adr. 0F52H Mdnom.
Mdcons para mando de par Md – 0C6EH Adr. 0F52H Mdnom.
Entrada generador de rampas 0E00H 0E02H 10 0000H nnom.
Salida generador de rampas 0E04H 0E06H 10 0000H nnom.
Consigna de corriente magnetizante – 0F5CH 2 000H nnom. 1 ms
Consigna de corriente activa – 0F5EH 2 000H nnom. Frecuencia de re-gulador de veloci-dad de giro como
Consigna de frec. de deslizamiento – 0F7CH 2 000H fnom.dad de giro comoparametrizada en
P-090
Temperatura de estator – 0FC2H 64H 100 °C 1 s
Entrada de filtro digital – 1B08H Adr. 0F52H Mdnom. Frecuencia de re-gulador de veloci-dad de giro como
Salida de filtro digital – 1B0AH Adr. 0F52H Mdnom.dad de giro comoparametrizada en
P-090
Tensión de circuito intermedio – 906H2) 3593 600 V 1 ms
Potencia P/Pnom – 3064H 4000H Pnom. 1 ms
Potencia |P/Pnom| – 3050H1) 4000H Pnom. 1 ms
1) a partir de FW 2.002) hasta FW 2.40
Módulos de cabezal (HS)6.5 Direcciones de variables en RAM
10.00

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-113 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.6 Parámetros de ajuste y control (lista de parámetros)
casillas sombreadas: no son posibles introducciones de valores
Tabla 6-14 Vista de conjunto de los parámetros (ayuda para la búsqueda de descripciones)
P– Apt. Pág. P– Apt. Pág. P– Apt. Pág. P– Apt.. Pág. P– Apt.. Pág.
000 2.2.1 25 040 2.2.3 28 080 5.1.4 83 120 4.2 75 160 2.1 18
001 5.1.1 77 041 2.2.3 28 081 3.2.2 59 121 2.3.3 35 161 2.1 18
002 5.1.1 77 042 2.2.3 28 082 3.2.2 59 122 2.3.3 35 162 2.1 18
003 5.1.1 77 043 2.2.3 28 083 3.2.2 59 123 2.3.3 35 163 2.1 18
004 5.1.1 77 044 4.1 73 084 3.2.2 59 124 2.3.3 35 164 2.1 18
005 – – 045 4.1 73 085 3.2.2 59 125 2.3.3 35 165 2.1 18
006 5.1.1 77 046 4.1 73 086 3.2.2 59 126 2.3.3 36 166 2.1 18
007 5.1.1 77 047 3.3.2 63 087 3.2.2 59 127 – – 167 2.1 18
008 5.1.1 77 048 2.3.4 46 088 3.2.2 59 128 2.3.3 42 168 2.1 18
009 5.1.1 77 049 2.3.4 46 089 3.2.2 59 129 2.3.3 36 169 2.1 18
010 5.1.1 77 050 2.2.3 28 090 1.3 10 130 2.3.3 36 170 2.1 18
011 5.1.2 78 051 1.3 9 091 2.3.6 52 131 2.3.3 36 171 2.1 18
012 3.3.5 68 052 1.3 9 092 2.3.6 52 132 2.3.3 42 172 2.1 18/19
013 3.3.5 68 053 1.3 9 093 2.3.6 50 133 2.3.3 42 173 2.1 16/19
014 3.1 56 054 2.3.1 30 094 2.3.6 50 134 2.3.3 33/37 174 2.1 18
015 3.1 56 055 2.3.1 30 095 2.1 15/17 135 2.3.3 33/37 175 2.1 18/19
016 4.1 70 056 2.3.1 30 096 2.1 15/17 136 2.3.3 33/37 176 2.1 16/19
017 4.1 70 057 – – 097 2.1 15/17 137 2.3.3 33/37 177 2.1 16/18
018 4.1 69 058 2.3.1 30 098 2.1 15/17 138 2.3.3 33/37 178 2.1 23
019 4.1 69 059 – – 099 2.2.2 26 139 2.3.3 33/37 179 5.1.5 84
020 5.1.3 81 060 – – 100 2.2.1 25 140 2.3.3 42 180 2.1 24
021 3.3.2 63 061 – – 101 5.1.1 77 141 2.3.3 32/38 181 5.1.5 84
022 2.2.3 27 062 2.3.1 30 102 5.1.1 77 142 2.3.3 33/39 182 5.1.5 84
023 3.3.2 63 063 2.2.3 29 103 4.1 74 143 2.3.3 39 183 5.1.5 84
024 3.1 56 064 2.2.3 29 104 4.1 74 144 2.3.3 40 184 – –
025 2.2.3 27 065 2.2.3 29 105 – – 145 2.3.3 40 185 3.3.3 64
026 3.3.5 68 066 3.3.5 67 106 2.3.6 51 146 2.3.3 40 186 3.3.3 64
027 3.3.2 63 067 3.3.5 67 107 2.3.6 52 147 2.3.3 42 187 3.3.3 64
028 5.1.3 81 068 3.3.5 67 108 2.3.6 52 148 2.3.3 40 188 3.3.3 64
029 2.2.3 27 069 3.3.5 67 109 2.3.6 49 149 2.3.3 36/41 189 3.3.3 64
030 3.1 57 070 – – 110 2.3.6 49 150 2.2.2 26 190 3.3.3 64
031 4.1 71 071 3.3.5 68 111 2.3.6 51 151 1.3 9 191 3.3.3 64
032 4.1 71 072 5.1.4 83 112 2.3.6 51 152 1.3 9 192 3.3.3 64
033 3.3.4 65 073 5.1.4 83 113 3.1 55 153 – – 193 3.3.3 64
034 4.1 70 074 5.1.4 83 114 2.3.2 31 154 2.2.3 29 194 3.3.3 64
035 4.1 76 075 – – 115 2.3.2 31 155 2.2.3 29 195 4.1 72
036 2.2.3 27 076 5.1.4 83 116 4.2 75 156 2.2.3 29 196 4.1 72
037 2.2.3 27 077 5.1.4 83 117 4.1 74 157 2.2.3 29 197 – –
038 2.2.3 27 078 3.3.5 67 118 4.1 74 158 2.1 18 198 4.1 72
039 2.2.3 28 079 2.2.3 67 119 2.3.6 52 159 2.1 18 199 4.1 72
Módulos de cabezal (HS)10.00

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-114 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-14 Vista de conjunto de los parámetros (ayuda para la búsqueda de descripciones), continuación
P– Pág.Apt..P–Pág.Apt..P–Pág.Apt.P–Pág.Apt.P–Pág.Apt.
200 – – 230 2.1 22 260 3.3.2 63 290 2.2.3 28 320 5.1.3 81
201 4.1 76 231 2.1 22 261 2.2.3 27 291 2.2.3 29 321 5.1.3 81
202 4.1 76 232 2.1 23 262 3.3.2 63 292 4.2 75 322 2.3.7 54
203 4.1 76 233 2.1 23 263 3.3.2 63 293 4.1 72 323 – –
204 – – 234 2.1 22 264 2.2.3 27 294 2.1 22 324 – –
205 – – 235 2.1 23 265 4.1 71 295 – – 325 – –
206 5.1.6 85 236 2.1 23 266 4.1 71 296 – – 326 – –
207 5.1.6 85 237 2.1 22 267 2.2.3 27 297 – – 327 – –
208 5.1.6 85 238 2.1 21 268 2.2.3 27 298 – – 328 – –
209 5.1.6 85 239 2.1 21 269 2.2.3 28 299 5.1.3 81 329 – –
210 5.1.6 85 240 2.1 23 270 2.2.3 28 300 – – 330 5.1.1 77
211 5.1.6 85 241 3.3.2 61 271 2.2.3 28 301 – – 331 4.2 76
212 5.1.6 85 242 3.3.2 61 272 2.2.3 28 302 – – 332 4.2 76
213 5.1.6 85 243 3.3.2 61 273 2.2.3 28 303 – – 333 4.2 76
214 5.1.6 85 244 3.3.2 61 274 4.1 73 304 – – 334 – –
215 5.1.6 85 245 3.3.2 61 275 4.1 73 305 – – 335 – –
216 5.1.6 85 246 3.3.2 61 276 4.1 74 306 – – 336 – –
217 5.1.6 85 247 3.3.2/3.3.3
63/64 277 4.1 74 307 – – 337 – –
218 5.1.6 85 248 4.1 74 278 4.2 75 308 – – 338 – –
219 2.1 22 249 2.3.5 48 279 – – 309 – – 339 – –
220 2.1 22 250 2.3.5 48 280 4.1 74 310 – – 340 2.3.4 47
221 2.1 22 251 2.3.5 48 281 4.1 74 311 5.1.7 86 341 2.3.4 47
222 2.1 22 252 – – 282 – – 312 5.1.7 86 342
223 2.1 22 253 – – 283 4.1 72 313 5.1.7 86 343 2.3.4 47
224 2.1 22 254 5.1.2 79 284 4.1 72 314 – – 344 2.3.4 47
225 2.1 22 255 5.1.2 80 285 4.1 72 315 – – 345 2.3.4 47
226 2.1 22 256 3.3.2 63 286 4.1 72 316 4.2 75 346 2.3.4 47
227 2.1 22 257 3.3.2 63 287 – – 317 2.3.7 54 347 2.3.4 47
228 2.1 22 258 3.1 56 288 4.1 72 318 2.3.7 54 348 – –
229 2.1 22 259 – – 289 4.1 72 319 2.3.7 54 349 – –
Módulos de cabezal (HS) 10.00

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-115 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
firm
-w
are
Dim
.1
23
45
67
8
(P–0
00)
(P–0
01)
Vers
.
(P–0
02)
(P–0
03)
(P–0
04)
(P–0
06)
(P–0
07)
(P–0
08)
(P–0
09)
(P–0
10)
(P–0
11)
P–0
14
P–0
15
P–0
16
P–0
17
P–0
18
P–0
19
(P–0
20)
P–0
21
P–0
22
P–0
23
P–0
24
P–0
26
P–0
27
(P–0
28)
Mot
1
Mot
1
Mot
1
Mot
1
Mot
1
– – – – – – – – – – –
–200
,0...
200,
0
–200
,0...
200,
0
C00
0...4
000
0,01
...64
,00
3...1
0000
0...3
0
–
0...n
5,0.
..15,
0
–
0,01
...64
,00
1...n
0...n
–200
,0...
200,
0
0...n
– – – – – – – – – – –
100,
0
100,
0
0
2,00
2,00 5 0 – 12 6000
10,0
100,
0
20 –
– % % Hex s s ms
Hex % HexV % V A kVA
kW
C
Hex
°
P–0
12
P–0
13
2.2.
1
5.1.
1
5.1.
1
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.40
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
5.1.
1
5.1.
1
5.1.
1
5.1.
1
5.1.
1
5.1.
1
5.1.
1
5.1.
2
3.3.
5
3.3.
5
3.1
3.1
4.1
4.1
4.1
4.1
5.1.
3
3.3.
2
3.3.
2
3.3.
2
2.2.
3
5.1.
3
3.1
3.3.
5
0...n
1.20
2.2.
3P
–029
P–0
25Te
mpo
rizac
ión
de b
loqu
eo d
e im
puls
os2.
2.3
0...1
5000
0
V ms
3.00
No
. PD
esig
nac
ión
Ap
t.M
arg
en d
e aj
ust
eP
refi
jad
oVa
lor
aju
stad
o p
ara
los
dif
eren
tes
esca
lon
es d
e re
du
cció
n
r/m
in
r/m
in
r/m
in
Dec
r/m
in
r/m
in
r/m
in
nm
áxM
ot
nno
m/2
56
–n...
nm
áxM
otm
áxM
ot
r/m
in
r/m
inn
máx
Mot
nom
nom
máx
Mot
nom
/16
máx
Mot
Lim
itaci
ón d
e ve
loci
dad
Dia
gnós
tico
cons
Ban
da to
lera
ncia
señ
al. ”
= n
”re
al
Nor
mal
izac
ión
CD
AM
/Mno
m
Nor
mal
izac
ión
cons
igna
vel
ocid
ad
para
señ
aliz
ació
n ”
nx
nre
al<
nx”
Um
bral
de
bloq
ueo
de im
puls
os
nm
ínpa
ra s
eñal
izac
ión
”nre
al<
nm
ín”
Val
or r
eal v
eloc
idad
Gra
do d
e re
dond
eo c
onsi
gna
velo
cida
d
Tie
mpo
alis
ado
cons
igna
vel
ocid
ad
Tie
mpo
dec
eler
ació
n ge
nera
dor
ram
pas
Tie
mpo
ace
lera
ción
gen
erad
or r
ampa
s
Cor
recc
ión
offs
et c
onsi
gna
velo
cida
d
Vel
ocid
ad ú
til m
áx. d
el m
otor
Nor
mal
izac
ión
indi
caci
ón ta
sa d
e ca
rga
Nor
mal
izac
ión
CD
An
real
Indi
caci
ón
Est
ado
de e
ntra
das
bina
rias
Tem
pera
tura
mot
or
Pot
enci
a ac
tiva
mot
or
Pot
enci
a re
activ
a m
otor
Inte
nsid
ad m
otor
Tens
ión
circ
uito
inte
rmed
io
Tasa
de
utili
zaci
ón
Tens
ión
mot
or
Vel
ocid
ad r
eal
Con
sign
a de
vel
ocid
ad
Vis
ualiz
ació
n de
est
ado
Módulos de cabezal (HS)

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-116 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4000
n/1
28
firm
-w
are
Dim
.1
23
45
67
8
P–0
31
P–0
32
Vers
.
5...6
000
0...7
3...1
000
3200
0
0...5
00
5...3
00
5...1
00
5...1
00
0...1
0...1
00
–250
...25
0
0...7
FF
F
0...1
C00
0...4
000
3200
0
50 100
100
50 500
20 1 50 90 100 0 0 0 11 0
Dec ms ms
P–0
33
P–0
35
Mot
1
Mot
1
Mot
1
Dec
P–0
37
P–0
38
P–0
39
P–0
40
P–0
41
P–0
42
P–0
43
P–0
44
P–0
45
P–0
46
P–0
47
P–0
48
P–0
49
P–0
52
P–0
53
P–0
54
0...F
FF
F
C00
0...4
000
32,0
20 0 3
% % % Hex % % Hex
Hex
Hex
Hex
Hex
P–0
55
P–0
56
P–0
62
Mot
1
Mot
1
Mot
1
Mot
1
Mot
1
Mot
1
Mot
1
Mot
1
Mot
1
Mot
1
Mot
1P
–050
P–0
51
4.1
4.1
3.3.
4
4.1
2.2.
3
2.2.
3
2.2.
3
2.2.
3
2.2.
3
2.2.
3
2.2.
3
4.1
4.1
3.3.
2
4.1
2.3.
4
2.3.
4
2.2.
3
1.3
1.3
2.3.
1
2.3.
1
2.3.
1
2.3.
1
1.3
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.40
1.20
1.20
1.20
1.20
–400
...40
0D
ecP
–036
02.
2.3
1.20
P–0
303.
12.
000
P–0
582.
3.1
2.00
0
P–0
34C
st. d
e tie
mpo
alis
amie
nto
valo
r re
al v
eloc
idad
4.1
3.00
0...1
0 3
ms
No
. PD
esig
nac
ión
Ap
t.M
arg
en d
e aj
ust
eP
refi
jad
oVa
lor
aju
stad
o p
ara
los
dif
eren
tes
esca
lon
es d
e re
du
cció
n
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
inno
m
nno
m
nno
mnom
n4
0...n
máx
Mot
1...n
máx
Mot
0...n
máx
Mot
1...n
máx
Mot
0...n
nom
0...n
máx
Mot
–n...
nm
áxM
otm
áxM
ot
0...n
máx
Mot
0...n
máx
Mot
0...n
máx
Mot
M19
um
bral
de
bloq
ueo
acci
ón I
reg.
n
Um
bral
de
desa
ctiv
ació
n de
red
onde
ado
M19
M19
vel
ocid
ad d
e tr
ansi
ción
M19
cor
r. of
fset
con
sign
a ve
loci
dad
M19
nor
mal
izac
ión
cons
igna
vel
ocid
ad
Pal
abra
de
man
do
Car
ga d
e pa
ram
etro
s en
FE
PR
OM
Pro
tecc
ión
escr
itura
Vel
. con
mut
ació
n de
Md1
a M
d2
Offs
et c
onsi
gna
de p
ar
Nor
mal
izac
ión
cons
igna
de
par
Mdx
para
señ
aliz
ació
n ”M
d<
Mdx
”
His
tére
sis
P-0
45
Vel
. act
ivac
ión
alis
. con
s. p
ar
Sel
ecci
ón a
lisam
ient
o co
nsig
na p
ar
His
tére
sis
P-0
42
Vel
ocid
ad tr
ansi
ción
par
a P
-040
Seg
undo
lím
ite d
e pa
r
Lim
itaci
ón fu
ncio
nam
ient
o en
gen
erad
or
Prim
er lí
mite
de
par
His
tére
sis
P-0
37
Vel
ocid
ad c
onm
ut. e
val.
capt
ador
mot
.
Cor
recc
ión
de e
rror
de
fase
de
capt
ador
Tie
mpo
alis
amie
nto
cons
igna
par
Res
oluc
ión
capt
ador
par
a C
N
Tie
mpo
acc
ión
inte
gral
reg
ulad
or n
Gan
anci
a P
reg
ulad
or v
eloc
idad
Vel
ocid
ad e
stac
iona
ria m
ínim
a1,
0...1
20,0
6,0.
..240
,0 a
par
. de
FW
3.1
Módulos de cabezal (HS)

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-117 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
12
34
56
78
P–0
66
P–0
670.
..15
0...F
FF
F
0...1
5
0...1
5
7F...
FF
80
7F...
FF
80
7F...
FF
80
1...3
2
1...3
2
1...3
2
1...3
2
1...3
2
1...3
2
1...3
2
0...F
FF
F
1...3
2
0 0 0 0 1 7 3 6 4 2 9 10 11
P–0
68
P–0
69
0...F
FF
F
P–0
77
P–0
78
P–0
79
P–0
80
P–0
81
P–0
82
P–0
83
P–0
84
P–0
85
P–0
86
P–0
87
P–0
88
P–0
89
1...3
2
0
3044 0
3048 0
0...F
FF
FP
–072
C04
0...1
5P
–073
0
7F...
FF
80P
–074
0
0...F
FF
FP
–076
3050
P–0
90
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
3.3.
5
3.3.
5
3.3.
5
3.3.
5
5.1.
4
5.1.
4
5.1.
4
5.1.
4
5.1.
4
3.3.
5
3.3.
5
5.1.
4
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
1.3
0
240
0...1
70
0...6
00
P–0
63M
ot 1
0...1
70
P–0
64
P–0
65
2.2.
3
2.2.
3
2.2.
3
1.20
1.20
1.20
P–0
912.
3.6
2.00
45...
750
300
P–0
922.
3.6
2.00
0,50
...10
,00
1,00
Alis
amie
nto
CD
A in
dica
ción
tasa
de
carg
a0.
..327
67P
–071
202.
403.
3.5
Valo
r aj
ust
ado
par
a lo
s d
ifer
ente
s es
calo
nes
de
red
ucc
ión
Dim
.
hex
dec
dec
hex
dec
hex
hex
hex
dec
dec
dec
dec
dec
dec
dec
dec
dec
hex
hex
dec
hex
hexsC
°
C
° Hz
dec
ms
dep.
tipo
mot
.
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.ap
t.D
esig
nac
ión
Dire
cció
n C
DA
1
Dire
cció
n C
DA
2
Fac
tor
de d
ecal
aje
CD
A 1
Fac
tor
de d
ecal
aje
CD
A 2
Tem
pera
tura
fija
Ret
ardo
ala
rma
sobr
ecal
enta
mie
nto
mot
or
Tem
pera
tura
máx
. mot
or
Fac
tor
de d
ecal
aje
CD
A 3
Cor
recc
ión
offs
et C
DA
1
Cor
recc
ión
offs
et C
DA
2
Cor
recc
ión
offs
et C
DA
3
Asi
gnac
ión
born
e E
1
Asi
gnac
ión
born
e E
2
Asi
gnac
ión
born
e E
3
Asi
gnac
ión
born
e E
4
Asi
gnac
ión
born
e E
5
Pal
abra
de
man
do
Asi
gnac
ión
born
e E
6
Asi
gnac
ión
born
e E
7
Asi
gnac
ión
born
e E
8
Asi
gnac
ión
born
e E
9
Dire
cció
n C
DA
4
Fac
tor
de d
ecal
aje
CD
A 4
Offs
et C
DA
4
Dire
cció
n C
DA
3
Fre
cuen
cia
de fi
ltro
1 H
PC
Fac
tor
calid
ad d
el fi
ltro
1 H
PC
No
. P
Módulos de cabezal (HS)

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-118 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
(P–1
01)
P–N
r.D
im.
12
34
56
78
P–1
04
Mot
1
– 300
(P–1
02)
Mot
1
–
50...
450
0,10
...10
,00
––
% Hz
1,00
P–1
03
1.20
1.20
1.20
1.20
5.1.
1
5.1.
1
4.1
4.1
– –
(P–0
99)
(P–1
00)
0.00
...99
.00
––
1.20
1.20
2.2.
2
2.2.
1
Mot
1
6...1
3
101.
..423
7
101
P–0
96
P–0
951.
20
1.20
2.1
2.1
P–0
942.
3.6
2.00
nno
m/8
0
2048
P–0
97
P–0
98
0...1
128.
..409
6
1.20
1.20
2.1
2.1
P–1
062.
3.6
2.00
3...1
0000
3m
s
P–1
072.
3.6
2.00
45...
750
300
Hz
P–1
082.
3.6
2.00
0,50
...10
,00
1,00
P–1
092.
3.6
2.00
5...1
8010
0%
P–1
102.
3.6
2.00
5...1
0010
0%
P–1
112.
3.6
2.00
3,0.
..240
,010
,0
P–1
122.
3.6
2.00
2...6
000
20m
s
P–1
130.
..3
P–1
14
P–1
150
C00
0...4
000
P–1
160
Mot
1–2
55...
255
P–1
170
Mot
10.
..FF
FF
P–1
180
Mot
10.
..FF
FF
nno
m/8
31.
20
1.20
1.20
1.20
1.20
1.20
3.1
2.3.
2
2.3.
2
4.2
4.1
4.1
P–1
192.
3.6
2.00
5...1
0010
0
P–1
20M
ot 1
500.
..100
001.
204.
2
2.3.
62.
00P
–093
C00
0...4
000
0
–nno
m–1
...+
nno
m–1
–nno
m–1
...+
nno
m–1
Valo
r aj
ust
ado
par
a lo
s d
ifer
ente
s es
calo
nes
de
red
ucc
ión
r/m
in
dec
dec
dec
hex
dec
r/m
in
dec
dec
dec
hex
r/m
in
hex
dec
hex
hex
% r/m
inde
p. ti
po m
ot.
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.A
pt.
Con
sign
a pa
ra m
odo
man
do d
e pa
r
Des
ign
ació
n
Fre
cuen
cia
filtr
o co
ns. p
ar
Fac
tor
de c
alid
ad fi
ltro
cons
. par
Vel
ocid
ad r
eal
Vis
ualiz
ació
n de
est
ado
Ver
sión
de
firm
war
e
Cód
igo
de la
par
te d
e po
tenc
ia
Cód
igo
del m
otor
Nor
mal
izac
ión
cons
igna
vel
ocid
ad H
PC
No.
de
raya
s ca
ptad
or m
otor
Inic
ializ
ació
n
Cte
. de
tiem
po a
lisam
ient
o co
ns. v
el. H
PC
Fre
cuen
cia
de fi
ltro
2 H
PC
Fac
tor
calid
ad fi
ltro
2 H
PC
Lím
ite d
e pa
r H
PC
Lim
itaci
ón e
n ge
nera
dor
HP
C
Gan
anci
a P
reg
ulad
or v
eloc
idad
HP
C
T. a
cció
n in
tegr
al r
eg. v
el. H
PC
Sel
ecci
ón c
anal
con
s. v
eloc
idad
Nor
mal
izac
ión
cons
. vel
ocid
ad e
je C
Cor
r. of
fset
con
s. v
eloc
idad
eje
C
Cor
r. ga
nanc
ia P
reg
ulad
or in
tens
idad
Sel
ecci
ón fi
ltro
cons
igna
de
par
Tip
o fil
tro
cons
igna
de
par
Ada
ptac
ión
de fl
ujo
HP
C
Vel
. con
mut
. ada
ptac
ión
reg.
inte
nsid
ad
Cor
r. of
fset
con
sign
a ve
loci
dad
HP
Che
x
Módulos de cabezal (HS)

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-119 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
12
34
56
78
P–1
220
0...6
4000
P–1
2325
6–3
2768
...32
767
P–1
240
0...6
4000
P–1
250
0...6
4000
P–1
2610
,00,
0...1
80,0
––
P–1
290
0...1
P–1
300
0...6
4000
P–1
3120
4812
8...6
4000
––
––
(P–1
28)
(P–1
32)
(P–1
33)
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
P–1
210
0...6
4000
1.20
2.3.
3
0...
100 0
(P–1
40)
0...F
FF
F
0...F
FF
F
0...2
1
––
P–1
430.
..1
P–1
44
P–1
455,
000,
00...
18,0
0
P–1
4650
0
(P–1
47)
––
P–1
481,
00,
0...1
80,0
0 0
0,00
...18
,00
1,00
P–1
42
P–1
41
P–1
39
nom
n
4
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
P–1
3410
,00,
0...1
80,0
P–1
352,
00,
0...1
80,0
P–1
3622
00.
..FF
FF
P–1
3722
00.
..FF
FF
P–1
3844
0...F
FF
F
1.20
1.20
1.20
1.20
1.20
2.3.
3
2.3.
3
2.3.
3
2.3.
3
2.3.
3
Valo
r aj
ust
ado
par
a lo
s d
ifer
ente
s es
calo
nes
de
red
ucc
ión
Dim
.
dec
dec
dec
dec
dec
dec
hex
dec
dec
dec
dec
dec
hex
dec
hex
hex
hex
gred
.
grad
.
r/m
in
dec
grad
.
grad
.
grad
.
hex
hex
hex
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.A
pt.
Des
ign
ació
n
Con
sign
a de
pos
ició
n 2
Con
sign
a in
crem
enta
l de
posi
ción
Con
sign
a de
pos
ició
n 4
Mar
gen
desb
loqu
eo in
tegr
ador
reg
. vel
ocid
ad
Con
sign
a ac
tual
de
posi
ción
Def
inic
ión
orig
en in
tern
o
Dec
alaj
e de
orig
en/m
arca
0
No.
máx
. de
raya
s en
tre
2 or
ígen
es
Val
. abs
. rea
l pos
ició
n 0
deca
laje
orig
en
Dife
renc
ia e
ntre
2 o
ríge
nes
exte
rnos
Con
sign
a de
pos
ició
n 3
Con
sign
a de
pos
ició
n 1
Par
ámet
ro c
onm
ut. e
n po
sici
onam
ient
o
Fac
tor
mul
tiplic
ació
n pa
rábo
la fr
enad
o
Mar
ca p
ara
acel
erac
ión
Val
. abs
. rea
l pos
ició
n co
n de
cala
je o
rigen
Par
ám. d
e va
lidac
ión
para
P-1
41
Mar
gen
tole
ranc
ia –
rel
é 1
Mar
gen
tole
ranc
ia –
rel
é 2
Vel
ocid
ad d
e bú
sque
da p
. pos
icio
nam
. cab
ezal
Con
teni
do d
el c
onta
dor
de p
osic
ión
para
BE
RO
Ven
tana
de
desp
laza
mie
nto
posi
cion
am. c
abez
.
Pun
to d
e in
terv
enci
ón d
e P
-136
Pun
to d
e in
terv
enci
ón d
e P
-137
/P-1
38
Gan
anci
a P
– S
egm
ento
1
Gan
anci
a P
– S
egm
ento
2
Gan
anci
a P
– S
egm
ento
2 (
HM
S)
No
. P
Módulos de cabezal (HS)10.00

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-120 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
P–1
77
–n...
nm
axM
otm
axM
ot
–n...
nm
axM
otm
axM
ot
12
34
56
78
P–1
4940
0...F
FF
F
(P–1
50)
P–1
510
0...7
FF
F
P–1
520
0...1
P–1
540
P–1
550
P–1
5610
0010
...10
000
ms
1000
0...1
0000
ms
P–1
59M
ot 1
0,00
2...3
2,00
0kg
m
P–1
60M
ot 1
0,0.
..150
,0kW
P–1
61M
ot 1
0,00
...20
0,0
A
Mot
10,
0...5
00,0
V
P–1
57
P–1
62
2
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.3
2.2.
2
1.3
1.3
2.2.
3
2.2.
3
2.2.
3
2.2.
3
2.1
2.1
2.1
2.1
Mot
1
Mot
1
0...3
2767
0...6
5535
100.
..240
00
0...3
2767
P–1
73M
ot 1
100.
..600
0
P–1
74M
ot 1
P–1
75M
ot 1
50...
300
%
P–1
76M
ot 1
50...
150
%
0...1
Mot
1
Mot
1
0...2
0000
P–1
72
P–1
71
P–1
70
P–1
69m m m
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.1
2.1
2.1
2.1
2.1
2.1
2.1
2.1
2.1
Mot
1–
P–1
64M
ot 1
0,0.
..409
,6H
z
P–1
65M
ot 1
0,0.
..500
,0V
P–1
66M
ot 1
0,00
...20
0,00
A
P–1
67M
ot 1
0...3
2767
P–1
68M
ot 1
0...3
2767
m
0...4
096
P–1
63
m
1.20
1.20
1.20
1.20
1.20
1.20
2.1
2.1
2.1
2.1
2.1
2.1
P–1
582.
13.
000,
000.
..65,
535
0,00
0M
ot 1
mH
(P–1
78)
Mot
12.
1.3
3.1
U/m
in0.
..327
67
No
. PD
esig
nac
ión
Par
ám. p
. en
m. e
je C
/pos
.
Iden
tific
ador
de
mód
ulo
Pro
tecc
ión
de e
scrit
ura
Car
ga d
e pa
rám
etro
s en
FE
PR
OM
Con
sign
a de
osc
ilaci
ón 2
Inte
rval
o de
osc
ilaci
ón 1
Inte
rval
o de
osc
ilaci
ón 2
Mom
ento
de
iner
cia
mot
or
Pot
enci
a no
min
al m
otor
Inte
nsid
ad n
omin
al m
otor
Tens
ión
nom
inal
mot
or
Con
sign
a de
osc
ilaci
ón 1
Rea
ctan
cia
prin
cipa
l
Rea
ctan
cia
disp
ersa
est
ator
Vel
. sup
erio
r ca
ract
erís
tica
Rea
ctan
cia
disp
ersa
rot
or
Vel
. tra
nsic
ión
debi
l. de
cam
po
Vel
ocid
ad m
áx. d
el m
otor
Gan
anci
a ca
ract
erís
tica
Fac
tor
redu
cció
n pr
ot. d
esen
ganc
he
Lanz
amie
nto
cálc
ulo
mot
or 1
(P
-096
)
L h
Vel
ocid
ad n
omin
al m
otor
Fre
cuen
cia
nom
inal
mot
or
Tens
ión
en v
acío
mot
or
Inte
nsid
ad e
n va
cío
mot
or
Res
iste
ncia
est
ator
frío
Res
iste
ncia
rot
or fr
ío
Indu
ctan
cia
de la
bob
ina
serie
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
Dim
.P
refi
jad
oM
arg
en d
e aj
ust
eA
pt.
firm
-w
are
Vers
.Va
lor
aju
stad
o p
ara
los
dif
eren
tes
esca
lon
es d
e re
du
cció
n
depe
nde
de la
con
figur
ació
n 0
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
hex
hex
hex
hex
hex
Vel
ocid
ad d
e gi
ro in
icia
l par
de
vuel
co
Módulos de cabezal (HS) 10.00

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-121 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Dim
.1
23
45
67
8
P–1
790
0...2
P–1
800
0...1
00.
..FF
FF
––
––
P–1
85C
060.
..FF
FF
P–1
860
0...F
FF
F
P–1
870,
000,
00...
10,0
0
0,00
0,00
...10
,00
P–1
891
0...F
FF
F
P–1
90C
060.
..FF
FF
P–1
910
0...F
FF
F
P–1
81
(P–1
82)
(P–1
83)
P–1
88
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
5.1.
5
2.1.
3
5.1.
5
5.1.
5
5.1.
5
3.3.
3
3.3.
3
3.3.
3
3.3.
3
3.3.
3
3.3.
3
3.3.
3
Mot
1
80 0
5...6
000
0...7
0...1
1...2
0010
0
P–2
070.
..10
P–2
08
P–2
090
0...F
FF
F
P–2
100
0...F
FF
F
0 1
Mot
1
Mot
1
0...F
FF
F0
P–2
06
P–2
03
P–2
02
P–2
011.
20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
5.1.
6
4.1
4.1
4.1
5.1.
6
5.1.
6
5.1.
6
5.1.
6
0,00
0,00
...10
,00
0,00
0,00
...10
,00
P–1
941
0...F
FF
F
P–1
9510
00M
ot 1
P–1
9612
00M
ot 1
P–1
9824
,0M
ot 1
P–1
9910
0M
ot 1
1...2
00
P–1
92
P–1
93
0...n
máx
Mot
0...n
máx
Mot
1.20
1.20
1.20
1.20
1.20
1.20
1.20
3.3.
3
4.1
4.1
4.1
4.1
3.3.
3
3.3.
3
Valo
r aj
ust
ado
par
a lo
s d
ifer
ente
s es
calo
nes
de
red
ucc
ión
hex
hex
hex
hex
hex
hex
hex s s hex
hex
hex
ms
% dec
hex
hex
hex
hex
hexs s hex
r/m
in
r/m
in
dec
%
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.A
pt.
Des
ign
ació
n
Sel
ecci
ón m
emor
ia m
ín/m
áx
Hab
ilita
ción
con
mut
ació
n es
trel
la/tr
iáng
ulo
Dire
cció
n pa
ra m
emor
ia m
ín/m
áx
Val
or m
ínim
o m
emor
ia m
ín/m
áx
Val
or m
áxim
o m
emor
ia m
ín/m
áx
Um
bral
par
a vi
gila
ncia
1
Ret
ardo
a la
exc
itaci
ón v
igila
ncia
1
Ret
ardo
a la
des
exci
taci
ón v
igila
ncia
1
His
tére
sis
vigi
lanc
ia 1
Dire
cció
n pa
ra v
igila
ncia
2
Um
bral
par
a vi
gila
ncia
2
Dire
cció
n pa
ra v
igila
ncia
1
Pal
. de
man
do a
dapt
ació
n re
g. n
T. a
cció
n in
tegr
al v
el. a
dapt
ació
n su
p.
Sel
ecci
ón r
egis
trad
or d
e tr
ansi
torio
s
Fac
tor
redu
cció
n t.
acci
ón in
tegr
al
Aju
ste
regi
stra
dor
tran
sito
rios
Dire
cció
n pa
ra c
ondi
ción
de
arra
nque
Um
bral
par
a co
ndic
ión
de a
rran
que
Dire
cció
n pa
ra c
ondi
ción
de
para
da
Ret
ardo
a la
exc
itaci
ón v
igila
ncia
2
Ret
ardo
a la
des
exci
taci
ón v
igila
ncia
2
His
tére
sis
vigi
lanc
ia 2
Vel
ocid
ad d
e ad
apta
ción
infe
rior
Vel
ocid
ad d
e ad
apta
ción
sup
erio
r
Gan
anci
a P
vel
. ada
ptac
ión
supe
rior
Fac
tor
de r
educ
ción
de
gana
ncia
P
No
. P
1,0.
..120
,06,
0...2
40,0
a p
ar. d
e F
W 3
.1
Módulos de cabezal (HS)10.00
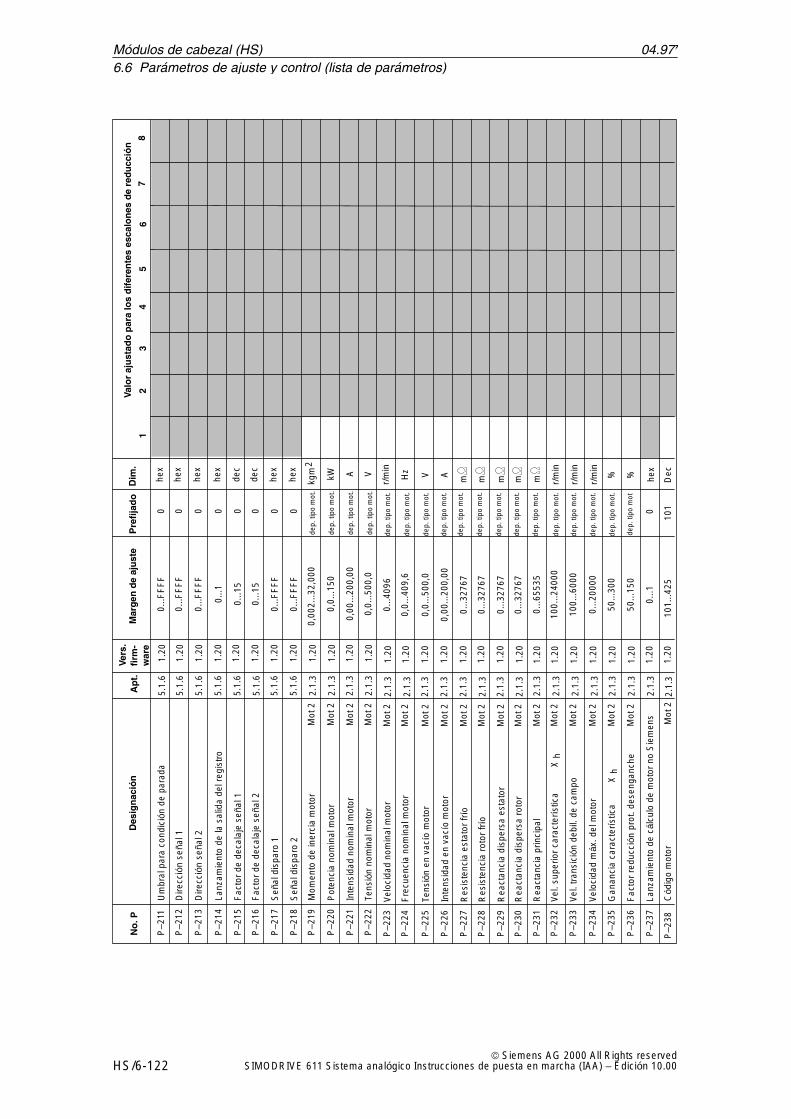
HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-122 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Dim
.1
23
45
67
8
P–2
110
0...F
FF
F
P–2
120
0...F
FF
F
P–2
130
0...F
FF
F
00.
..1
00.
..15
00.
..15
P–2
170
0...F
FF
F
P–2
180
0...F
FF
F
P–2
19M
ot 2
0,00
2...3
2,00
0
Mot
20,
0...1
50kW
P–2
21M
ot 2
0,00
...20
0,00
A
P–2
22M
ot 2
0,0.
..500
,0V
P–2
14
P–2
20
P–2
15
P–2
16
kgm
2
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
5.1.
6
5.1.
6
5.1.
6
5.1.
6
5.1.
6
5.1.
6
5.1.
6
5.1.
6
2.1.
3
2.1.
3
2.1.
3
2.1.
3
Mot
2
Mot
2
0...6
5535
100.
..600
0
0...2
0000
100.
..240
00
P–2
35M
ot 2
50...
300
%
P–2
36M
ot 2
%
P–2
370
0...1
Mot
2
Mot
2
50...
150
P–2
34
P–2
33
P–2
32
P–2
31m
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.1.
3
2.1.
3
2.1.
3
2.1.
3
2.1.
3
2.1.
3
2.1.
3
0,0.
..500
,0
P–2
23M
ot 2
0...4
096
Mot
20,
0...4
09,6
Hz
Mot
2V
P–2
26M
ot 2
0,00
...20
0,00
A
P–2
27M
ot 2
0...3
2767
P–2
28M
ot 2
0...3
2767
P–2
29M
ot 2
0...3
2767
P–2
30M
ot 2
0...3
2767
P–2
24
P–2
25
m m m m
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.1.
3
2.1.
3
2.1.
3
2.1.
3
2.1.
3
2.1.
3
2.1.
3
2.1.
3
Valo
r aj
ust
ado
par
a lo
s d
ifer
ente
s es
calo
nes
de
red
ucc
ión
hex
hex
hex
hex
dec
dec
hex
hex
r/m
in
r/m
in
r/m
in
r/m
in
hex
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
dep.
tipo
mot
.
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.A
pt.
Des
ign
ació
n
Um
bral
par
a co
ndic
ión
de p
arad
a
Dire
cció
n se
ñal 1
Dire
cció
n se
ñal 2
Lanz
amie
nto
de la
sal
ida
del r
egis
tro
Fac
tor
de d
ecal
aje
seña
l 1
Fac
tor
de d
ecal
aje
seña
l 2
Señ
al d
ispa
ro 2
Mom
ento
de
iner
cia
mot
or
Pot
enci
a no
min
al m
otor
Inte
nsid
ad n
omin
al m
otor
Tens
ión
nom
inal
mot
or
Señ
al d
ispa
ro 1
Vel
. tra
nsic
ión
debi
l. de
cam
po
Rea
ctan
cia
prin
cipa
l
Vel
ocid
ad m
áx. d
el m
otor
Vel
. sup
erio
r ca
ract
erís
tica
Gan
anci
a ca
ract
erís
tica
Fac
tor
redu
cció
n pr
ot. d
esen
ganc
he
Lanz
amie
nto
de c
álcu
lo d
e m
otor
no
Sie
men
s
Xh
Xh
Vel
ocid
ad n
omin
al m
otor
Fre
cuen
cia
nom
inal
mot
or
Tens
ión
en v
acío
mot
or
Inte
nsid
ad e
n va
cío
mot
or
Res
iste
ncia
est
ator
frío
Res
iste
ncia
rot
or fr
ío
Rea
ctan
cia
disp
ersa
est
ator
Rea
ctan
cia
disp
ersa
rot
or
No
. P
P–2
3810
1M
ot 2
101.
..425
Dec
1.20
2.1.
3C
ódig
o m
otor
Módulos de cabezal (HS) 04.9704.97

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-123 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Dim
.1
23
45
67
8
P–2
390
0...1
dec
P–2
412
1...2
0de
c
P–2
423
1...2
0de
c
11.
..20
dec
41.
..20
dec
51.
..20
dec
P–2
467
1...2
0de
c
P–2
470
0...F
FF
Fhe
x
P–2
490
0...F
FF
Fhe
x
00.
..FF
FF
hex
––
hex
P–2
43
P–2
44
P–2
45
P–2
50
P–2
51
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.1.
3
3.3.
2
3.3.
2
3.3.
2
3.3.
2
3.3.
2
3.3.
2
3.3.
2
2.3.
5
2.3.
5
2.3.
5
P–2
485.
2.2
2.00
100.
..100
0075
0m
s
Mot
2
20 50
Mot
2
5...6
000
3200
032
000
ms
%
P–2
70M
ot 2
0...5
00
%5.
..100
100
100
Mot
2
Mot
2
5...3
00P
–269
P–2
68
P–2
67
P–2
661.
20
1.20
1.20
1.20
1.20
2.2.
3
4.1
2.2.
3
2.2.
3
2.2.
3
0...n
nom
(P–2
54)
––
hex
––
hex
Mot
2
12M
ot 2
P–2
61M
ot 2
P–2
6260
00
P–2
6320
Mot
2
P–2
64M
ot 2
P–2
6532
,0M
ot 2
dec
P–2
58
P–2
60
(P–2
55)
0...n
nom
1...n
nom /1
6
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
5.1.
2
5.1.
2
3.1
3.3.
2
2.2.
3
3.3.
2
3.3.
2
2.2.
3
4.1
Ret
ardo
señ
aliz
ació
n ”n
cons
= n
real
” P
–256
P–2
57R
etar
do s
eñal
izac
ión
”Md
< M
dx”
3.3.
2
3.3.
2
3.00
3.00
0,00
...0,
50
0,00
...1,
00
0,20
0,80
ss
No
. PD
esig
nac
ión
Ap
t.fi
rm-
war
e
Vers
.M
arg
en d
e aj
ust
eP
refi
jad
oVa
lor
aju
stad
o p
ara
los
dif
eren
tes
esca
lon
es d
e re
du
cció
n
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
nm
áxM
ot
nno
m/2
56
nm
áxM
ot–n
... n
máx
Mot
máx
Mot
0...n
máx
Mot
0...n
máx
Mot
Lanz
amie
nto
cálc
ulo
mot
or 2
(P
-238
)
Señ
aliz
ació
n pr
ogra
mab
le 1
Señ
aliz
ació
n pr
ogra
mab
le 2
Señ
aliz
ació
n pr
ogra
mab
le 3
Señ
aliz
ació
n pr
ogra
mab
le 4
Señ
aliz
ació
n pr
ogra
mab
le 5
Señ
aliz
ació
n pr
ogra
mab
le 6
Pal
abra
de
man
do s
eñal
izac
ión
Seg
men
to c
élul
a m
emor
ia m
onito
r
Dire
cció
n cé
lula
mem
oria
mon
itor
Indi
caci
ón v
alor
cél
ula
mem
oria
mon
itor
Tem
poriz
ació
n se
ñaliz
ació
n fa
llo F
-11
Indi
caci
ón d
e fu
ncio
nes
activ
as 1
Indi
caci
ón d
e fu
ncio
nes
activ
as 2
Vel
. útil
máx
. del
mot
or
nm
ínpa
ra s
eñal
izac
ión
”nre
al<
nm
ín”
Um
bral
de
supr
esió
n de
impu
lsos
para
señ
aliz
ació
n ”n
nx
real
<n
x”
Ban
da to
ler.
para
señ
aliz
. ”n
= n
”co
nsre
al
Lim
itaci
ón d
e ve
loci
dad
His
tére
sis
P-2
67
T. a
cció
n in
tegr
al r
egul
. vel
ocid
ad
Prim
er lí
mite
de
par
Vel
. con
mut
. sel
ecc.
cap
tado
r m
otor
Lim
itaci
ón e
n ge
nera
dor
Gan
anci
a P
reg
ulad
or d
e ve
loci
dad
3,0.
..120
,06,
0...2
40,0
a p
ar. d
e F
W 3
.1
Módulos de cabezal (HS)04.97

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-124 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
0...n
nom
Dim
.1
23
45
67
8
P–2
71M
ot 2
%
P–2
7250
0M
ot 2
P–2
7320
Mot
2
5...1
00
P–2
7440
00M
ot 2
P–2
7550
Mot
2
P–2
7630
0M
ot 2
Hz
1,00
Mot
2de
c
0M
ot 2
50...
450
dec
0M
ot 2
0,10
...10
,00
hex
P–2
810
Mot
2
–255
...25
5
hex
P–2
8310
00M
ot 2
0...1
P–2
8412
00M
ot 2
0...1
24,0
Mot
2de
c
50
P–2
77
P–2
85
P–2
78
P–2
80
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
2.2.
3
2.2.
3
2.2.
3
4.1
4.1
4.1
4.1
4.2
4.1
4.1
4.1
4.1
4.1
1...2
00
P–2
86
80M
ot 2
ms
100
Mot
2%
Mot
2
5...6
000
Mot
2
P–2
92M
ot 2
P–2
93M
ot 2
dec
P–3
110,
0
500.
..100
00
%
P–3
120,
0
0...7
Hz
P–3
130
0,0.
..100
,0
dec
P–2
90
P–2
91
P–2
88
P–2
89
0,0.
..800
,0
0...1
0
C
°
nom
n
4
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
1.20
4.1
2.2.
3
2.2.
3
4.1
4.2
4.1
5.1.
7
5.1.
7
5.1.
7
0...1
70
100
Mot
2%
1...2
001.
204.
1
(P–2
99)
5.1.
32.
00–
–he
x
Indu
ctan
cia
de la
bob
ina
serie
2.1.
23.
000,
000.
..65,
535
0,00
0M
ot 2
P–2
94m
H
Valo
r aj
ust
ado
par
a lo
s d
ifer
ente
s es
calo
nes
de
red
ucc
ión
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.A
pt.
Des
ign
ació
nN
o. P
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
r/m
in
dep.
tipo
mot
.
dep.
tipo
mot
.
1...n
máx
Mot
0...n
máx
Mot
1...n
máx
Mot
0...n
máx
Mot
0...n
máx
Mot
0...n
máx
Mot
Seg
undo
lím
ite d
e pa
r
Vel
ocid
ad tr
ansi
ción
par
a P
-270
His
tére
sis
P-2
72
Vel
. act
ivac
ión
alis
. con
s. p
ar
His
tére
sis
P-2
74
Fre
cuen
cia
filtr
o co
ns. p
ar
Fac
tor
de c
alid
ad fi
ltro
cons
. par
Cor
r. ga
nanc
ia P
reg
ulad
or in
tens
idad
Sel
ecci
ón fi
ltro
cons
igna
de
par
Tip
o fil
tro
cons
igna
de
par
Vel
ocid
ad d
e ad
apta
ción
infe
rior
Vel
ocid
ad d
e ad
apta
ción
sup
erio
r
Gan
anci
a P
vel
. ada
ptac
ión
supe
rior
T. a
cció
n in
tegr
al v
el. a
dapt
ació
n su
p.
Fac
tor
redu
cció
n t.
acci
ón in
tegr
al
Tem
pera
tura
máx
. mot
or
Vel
. con
mut
. ada
ptac
ión
reg.
inte
nsid
ad
Pal
. de
man
do a
dapt
ació
n re
g. n
Vel
. con
mut
ació
n de
Md1
a M
d2
Fac
tor
de r
educ
ción
de
gana
ncia
P
Inte
nsid
ad e
n m
ando
I/f
Fre
cuen
cia
en m
ando
I/f
Sel
ecci
ón m
ando
I/f
Sum
a de
ver
ifica
ción
par
ámet
ros
0,0.
..120
,06,
0...2
40,0
a p
ar. d
e F
W 3
.1
Módulos de cabezal (HS) 04.9704.97

HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-125 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Fac
tor
de r
educ
ción
max
. cic
lo d
e ca
rga
I t
P–3
44
P–3
45
P–3
46
P–3
33
(P–3
47)
P–3
43
(P–3
30)
200
5.1.
3
0...9
99m
s
0,50
0,01
...10
0,00
%/m
s
0,10
0,01
...10
0,00
0,00
0,0.
..100
,0%kH
z
4
2.00
2.3.
4
2.3.
42.
00
2.3.
42.
00%
/ms
2.3.
42.
00
2.3.
42.
00
50,0
0,0.
..100
,0P
–341
2.3.
42.
00%
P–3
32
P–3
31
(P–3
20)
5.1.
3
5.1.
1
4.2
4.2
4.2
3.00
3.00
3.00
3.00
3.00
3.00
hex
hex
hex
2 6
0...7
0...7
0...7
P–3
402.
002.
3.4
%10
,00,
1...1
00,0
12
34
56
78
(P–3
21)
P–3
17
P–3
18
(P–3
19)
222.
3.7
2.3.
7
2.3.
7D
iagn
óstic
o m
odel
o de
pot
enci
a I
t
3.1
3.1
3.1
25...
100
25...
100
0...F
FF
F
100
100 0
hex%%
(P–3
22)
22.
3.7
3.1
0...1
00%
%
Dim
.N
o. P
Des
ign
ació
nA
pt.
firm
-w
are
Vers
.M
arg
en d
e aj
ust
eP
refi
jad
oVa
lor
aju
stad
o p
ara
los
dif
eren
tes
esca
lon
es d
e re
du
cció
n
––
dec
(P–3
16)
1.20
4.2
Indi
caci
ón g
anan
cia
P r
egul
ador
inte
nsid
ad
Fac
tor
de r
educ
ción
S6
cicl
o de
car
ga I
t
2
Dia
gnós
tico
orig
en c
apta
dor
mot
or
Dia
gnós
tico
orig
en c
apta
dor
cabe
zal
Lim
ita d
e ca
rga
I t
Fre
cuen
cia
de p
ulsa
ción
de
ondu
lado
r
Fre
cuen
cia
de p
ulsa
ción
de
ondu
lado
r 2
Fre
cuen
cia
de p
ulsa
ción
de
ondu
lado
r 3
Fre
cuen
cia
de p
ulsa
ción
de
ondu
lado
r 4
Des
v. v
eloc
idad
vig
ilanc
ia d
esliz
amie
nto
Red
ucci
ón p
ar v
igila
ncia
des
lizam
ient
o
Tem
poriz
ació
n vi
gila
ncia
des
lizam
ient
o
Vel
. aum
ento
par
vig
ilanc
ia d
esliz
amie
nto
His
tére
sis
para
P-3
40
Des
v. v
el. a
ctua
l vig
ilanc
ia d
esliz
amie
nto
Vel
. red
ucc.
par
vig
ilanc
ia d
esliz
amie
nto
Módulos de cabezal (HS)04.9710.00
HS
6.6 Parámetros de ajuste y control (lista de parámetros)07.94
HS/6-126 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de cabezal (HS)
Espacio para sus notas
10.00

HS
10.00
HS/i-1 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Índice
AAdaptación de flujo, HS/2-51Alimentación no regulada, HS/2-16Alisado, consigna de velocidad, HS/4-69Alisamiento
consigna de par, HS/4-73valor real velocidad, HS/4-70
Alisamiento de consigna de par, HS/4-73Aplicaciones estándar, HS/1-4, HS/2-24, HS/2-26
BBERO, HS/2-31, HS/2-34, HS/2-35, HS/2-38,
HS/2-41Bit, HS/1-6Bornes de entrada, HS/3-56Bornes de salida, HS/3-59
CCDA, HS/3-66Cifras hexadecimales, HS/1-6Códigos de motores, HS/6-99Códigos de partes de potencia, HS/6-99Códigos para partes de potencia y motores
estándar, HS/6-99Conexiones, HS/1-13
bornes de conexión, HS/6-105bornes de relé, HS/6-106conmutación estrella/triángulo, HS/6-107esquema de conexión, HS/6-104
Configuración maestro/esclavo, HS/2-43Consigna de velocidad, HS/3-53
alisado, HS/4-69normalización, HS/3-54selección de canal, HS/3-53unipolar, HS/3-54velocidad estacionaria mínima, HS/3-55
Corrección de error de fase del captador, HS/2-26
DDatos de ajuste, panorámica, HS/1-12Desbloqueo consigna, HS/3-57Diagnóstico, HS/5-77
parámetros, HS/5-81Display, HS/2-24, HS/5-87
EEje C, HS/2-24, HS/2-30Elementos de mando y señalización, HS/1-8
Escalón, HS/2-24, HS/3-57Estado equipo convertidor, HS/2-24
FFallos, HS/5-91
acuse, HS/5-87indicación, HS/5-87inhibición, HS/5-87
Filtro, HS/4-74Frecuencia pulsación ondulador, HS/4-76Función relé, HS/2-24Funciones de bornes
cableadas, HS/3-56programables, HS/3-57
asignación de funciones, HS/3-57Funciones de relés
cableadas, HS/3-59programables, HS/3-59
palabra de mando, HS/3-62señalizaciones parametrizables, HS/3-62
variables, HS/3-63
GGenerador de rampas, HS/4-70
HHembrillas de medida, HS/5-82
asignación, HS/5-82normalización IR, HS/5-82
IIdentificador de módulo, HS/2-25Indicación de estado
entradas binarias, HS/5-78funciones activas de los bornes, HS/5-79,
HS/5-80Inicialización, HS/2-15, HS/2-17, HS/2-20
JJuego de parámetros, HS/2-21Juego de parámetros de motor, HS/2-18
LLímite de par, HS/2-27, HS/3-57Lista de parámetros, HS/6-113
MM19, HS/2-24, HS/2-29, HS/3-57
Índice
Módulos de cabezal (HS)10.00

HS
10.00
HS/i-2 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Modo, HS/2-24Modo mando de par, HS/2-43
accionamiento esclavo, HS/2-43, HS/2-44accionamiento maestro, HS/2-43consigna de par, HS/2-43, HS/2-44descripción de la función, HS/2-43
Motores especialescaracterísticas de la consigna de flujo,
HS/2-19características de la inductancia principal,
HS/2-19inicialización, HS/2-17juego de parámetros de motor, HS/2-18
Motores estándar, inicialización, HS/2-15Motores estrella/triángulo, HS/6-101
característica de la consigna de flujo, HS/2-22característica de la inductancia principal,
HS/2-22conmutación de motores, HS/2-23conmutación motor, HS/3-57inicialización, HS/2-20juegos de parámetros, HS/2-21
Motores para incorporar, HS/6-102Motores refrigerados por agua, HS/6-101
OOcupación de conectores
BERO, HS/6-109captador cabezal, HS/6-109salida señales captador motor, HS/6-110
Oscilación, HS/3-57Oscilación de cabezal para engrane, HS/2-28
PParada orientada del cabezal, HS/2-29Parámetro
carga en FEPROM, HS/1-9dependientes del escalón de reducción,
HS/1-8margen de ajuste, HS/1-6número, HS/1-5, HS/1-8número de subparámetro, HS/1-8protección en escritura, HS/1-6valor, HS/1-8
Parámetrosatributos, HS/1-5margen de ajuste, HS/1-5protección en escritura, HS/1-9representación, HS/1-5
Parámetros de ajuste y control, HS/6-113Parámetros de indicación, HS/5-77Parámetros de visualización, HS/2-24Posicionamiento
marca 0 u origen, HS/2-33velocidad de búsqueda, HS/2-38
Posicionamiento del cabezal, HS/2-30consigna de posición, HS/2-32, HS/2-33,
HS/2-34, HS/2-40, HS/3-57consigna de posición actual, HS/2-41descripción de la función, HS/2-30impulso cero, HS/2-37impulso de origen, HS/2-32marca 0, HS/2-31, HS/2-35, HS/2-38,
HS/2-41, HS/2-42marca 0 u origen, HS/2-34parámetros de diagnóstico, HS/2-41puesta en marcha abreviada, HS/2-42regulador de posición, HS/2-36señalizaciones por relé, HS/2-33velocidad de búsqueda, HS/2-31, HS/2-32,
HS/2-40Puesta en marcha
consejos, HS/1-7posibilidades, HS/1-7
RReducción de corriente, con frecuencia de pulsa-
ción > 3,2 kHz, HS/1-11Registro de transitorios, función, HS/5-84Regulador de intensidad, HS/4-75Regulador de velocidad
adaption, HS/4-72ganancia, HS/4-71tiempo de acción integral, HS/4-71
Reinicialización del equipo convertidor, HS/1-7
SSalidas analógicas, HS/3-65
normalización fina, HS/3-67indicación M/M nom, HS/3-67indicación nreal, HS/3-67indicación P/Pmáx, HS/3-67
parametrización CDA 1, CDA 2, HS/3-66Series de máquinas, HS/1-7Sustitución de componentes, HS/1-7Sustitución del firmware, HS/1-7Sustitución del módulo, HS/1-7
VValor de ajuste de velocidad, HS/2-26Valores medidos, indicación, HS/5-77Variables en RAM, HS/6-112
direcciones, HS/6-112Velocidad estacionaria mínima, HS/3-55Versión de firmware, HS/2-25Vigilancia
de deslizamiento, HS/2-45temperatura del motor, HS/2-28
Visualización de estado, HS/2-24
Índice
Módulos de cabezal (HS) 10.00

AM
AM–i Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de motor asíncrono (AM)
1 Primeros pasos AM/1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Guía para la puesta en marcha AM/1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Consejos para la puesta en marcha AM/1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Elementos de mando y señalización, parámetros de mando AM/1-9. . . . . . .
1.4 Panorámica de datos de ajuste AM/1-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Conexiones AM/1-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Determinación y ajuste de la configuración del sistema AM/2-15. . . . . . . . . . . . . . . .
2.1 Juegos de parámetros de motores y convertidores AM/2-15. . . . . . . . . . . . . . .
2.2 Aplicaciones estándar AM/2-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.1 Visualización de estado AM/2-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.2 Versión de firmware AM/2-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.3 Parámetros de ajuste para aplicaciones estándar AM/2-23. . . . . . . . . . . . . . . .
2.3 Operación con varios motores AM/2-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.1 Operación con motores en paralelo AM/2-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.2 Conmutación del juego de parámetros AM/2-32. . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.3 Conmutación de motores AM/2-32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Operación con motores con velocidad máxima > 32000 r/min AM/2-34. . . . . .
2.5 Función monitor AM/2-36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Parametrización de las interfases del convertidor AM/3-37. . . . . . . . . . . . . . . . . . . . . .
3.1 Interfases de consigna de velocidad AM/3-37. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Bornes de entrada AM/3-40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.1 Funciones de bornes cableadas (de asignación fija) AM/3-40. . . . . . . . . . . . . . 3.2.2 Funciones de bornes programables AM/3-41. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Bornes de salida AM/3-43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.1 Funciones de relés cableadas (de asignación fija) AM/3-43. . . . . . . . . . . . . . . . 3.3.2 Funciones de relés programables AM/3-44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.3 Función de relé variable AM/3-47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.4 Salidas analógicas AM/3-48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Optimización de reguladores AM/4-51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Regulador de velocidad AM/4-54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Regulador de intensidad AM/4-57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Regulador de campo AM/4-60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Optimización en el margen en lazo abierto AM/4-61. . . . . . . . . . . . . . . . . . . . . .
4.5 Limitaciones AM/4-62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Velocidades y márgenes de velocidades particulares AM/4-63. . . . . . . . . . . . .
4.7 Optimización manual (reoptimización) AM/4-65. . . . . . . . . . . . . . . . . . . . . . . . . .

10.00
AM–ii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5 Diagnóstico y análisis de fallos AM/5-75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Herramientas de diagnóstico AM/5-75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.1 Indicación en display de valores medidos AM/5-75. . . . . . . . . . . . . . . . . . . . . . . 5.1.2 Indicaciones de estado AM/5-76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.3 Parámetros de diagnóstico AM/5-79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.4 Hembrillas de medida X1, X2, IR AM/5-80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.5 Memoria de valores mínimos/máximos AM/5-83. . . . . . . . . . . . . . . . . . . . . . . . . 5.1.6 Función de registro de transitorios AM/5-84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.7 Mando intensidad/frecuencia AM/5-86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Análisis de fallos AM/5-87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.1 Indicación y acuse de fallos AM/5-87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.2 Lista de indicaciones de fallo AM/5-88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Anexo AM/6-91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Diagrama de flujo para nueva puesta en marcha AM/6-92. . . . . . . . . . . . . . . . .
6.2 Códigos para partes de potencia AM/6-102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Conexiones AM/6-103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4 Interfaces AM/6-107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.4.1 X432, asignación del conector para BERO AM/6-107. . . . . . . . . . . . . . . . . . . . . . 6.4.2 X412, asignación del conector para sonda de temperatura
en motor AM/6-107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.4.3 X411, interfase serie AM/6-107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Direcciones de variables en RAM AM/6-108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6 Parámetros de ajuste y control (lista de parámetros) AM/6-109. . . . . . . . . . . . . .

AM
10.00
AM/1-3 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Primeros pasos
Precaución
El funcionamiento correcto y seguro de este equipo presupone un transporteadecuado asi como un almacenamiento, instalación y montaje correctos y ma-nejo y mantenimiento conformes.
Si no se observan las advertencias preventivas pueden aparecer lesiones gra-ves o daños materiales.
Los módulos y tarjetas incluyen componentes con sensibilidad electrostática.Por ello, respetar las instrucciones antiestáticas que figuran en el prólogo.
Indicación
El módulo con la ref. 6SN1121–0BA11–0AA1 sólo puede funcionar con elfirmware a partir de la versión 3.00.
Los módulos con las referencias:6SN1121–0BA11–0AA06SN1121–0BA12–0AA0
sólo pueden funcionar con firmware hasta versión 2.xx.
Indicación
Para la puesta en servicio de la regulación de motor asíncrono con interfaz deconsigna analógica está disponible un software de puesta en servicio.
Datos de pedido para el software:véase el catálogo NC 60 (referencia E86060–K4460–A101–A8
Datos de pedido para la documentación:Software de puesta en servicio para módulos de motor de cabezal y asíncro-nos. Referencia 6SN1197–0AA30–0AP1
Indicación
Definición del motor
Motor estándar: Motor específico para el cliente fabricado por Siemens.
Motor externo: Motores de otras empresas.
Motor especial: Motor específico para el cliente fabricado por Siemens.
Módulos de motor asíncrono (AM)1 Primeros pasos
1

AM
10.00
AM/1-4 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.1 Guía para la puesta en marcha
Las instrucciones de puesta en marcha presentan las acciones en el orden desu sucesión en la práctica.
Para la puesta en marcha de las aplicaciones estándar que se contenten con elestado de fábrica en lo que se refiere a la configuración de las interfases(apt. 1.5) y la optimización de reguladores, sólo tienen interés las etapas depuesta en marcha impresas en negrita.
Reg. de velocidad
Reg. de intensidad
Regulador de campo
Margen en lazoabierto
Limitaciones
Márgenes de velocida-des y velocidades par-ticulares
Optimización a mano
Interfase de consignade velocidad
Bornes de entrada
– Funciones de bornescableadas (asign. fija)
– Funciones de bornesprogramables
Bornes de salida
Juegos de paráme-tros para motor yequipo convertidor
Aplicacionesestándar
Op. con varios motores
– Operac. en paralelo
– Conmutación dejuego de parámetros
– Conmut. de mtores
Función monitor
1 Primeros pasos 2 Config. del sistema 4 Optimización reg.
Medios de diagnóstico Análisis de fallos
6 Anexo
Diagrama de flujo
Sinopsis de conexiones
Direcciones de variables en RAM
Datos de ajuste y de control
3 Interfases convertidor
Guía para la puestaen marcha
Consejos para pue-sta en marcha
Elem. de mando e in-dicación, parámetrosde mando
Panorámica de da-tos de ajuste
Conexiones
5 Diagnóstico, análisis de fallos
Figura 1-1 Etapas de puesta en marcha
Estructura de lasinstrucciones depuesta en marcha
Módulos de motor asíncrono (AM)1.1 Guía para la puesta en marcha
07.94

AM
10.00
AM/1-5 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Precaución
Los valores de los parámetros que no figuran en la lista de parámetros(v. apt. 6.6) no deberán modificarse en ningún caso.
Las descripciones de los parámetros se representan en forma de tabla.
El orden cronológico de los parámetros en dichas tablas se corresponde con lamarcha a seguir durante la parametrización.
Tabla 1-1 Ejemplo de representación de parámetros
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripcióntiva
g j p
P–024P–014.MP–039.GP–114.F(P–001)
online
trasinicializa-
ción
4
10
Valores admitidosDimensión
Designación del parámetroDescripción abreviada del parámetroFW x.xx
Número
– P–024
Parámetro de validez general
– P–014.M
Parámetro dependiente del motorSubparámetros P–014.1...P–014.4
– P–039.G
Parámetro dependiente del escalón de reducciónSubparámetros P–039.1...P–039.8
– P–114.F
Parámetro dependiente de una consigna de velocidad fijaSubparámetros P–114.1...P–014.7
– (P–001)
Parámetro de indicación; no puede modificarse su valor.
Representación deparámetros
Atributos de losparámetros
Módulos de motor asíncrono (AM)1.1 Guía para la puesta en marcha
07.9404.97

AM
10.00
AM/1-6 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Modif. activa
– online
Modificación inmediatamente activa.
– tras inicialización (carga inicial)
La puesta a 1H de P–097 activa una operación de inicialización.
P–051
Parámetro de protección en escrituraSupresión de la protección en escritura ajustando el valor 4H oSupresión de la protección especial en escritura ajustando el valor 0010H.
Para determinadas palabras de mando, la función se activa poniendo a unosbits en número binario introduciendo éste en formato hexadecimal.
Ejemplo:
BIT 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit 6: 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 Bin 0040H
Bit 7: 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 Bin 0080H
Una combinación de varias funciones se entra en forma de adición de los valo-res binarios o hexadecimales.
Ejemplo:
BIT 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit 6+Bit 7 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 Bin 00C0H
FW x.xx
Identificación de la extensión funcional o de parámetros en función de laversión de firmware. La extensión está disponible a partir de la versión defirmware indicada.
Margen de ajuste
Descripción
Módulos de motor asíncrono (AM)1.1 Guía para la puesta en marcha
07.9412.9410.0004.97

AM
10.00
AM/1-7 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.2 Consejos para la puesta en marcha
vía
Elementos de mando y señalización (v. capt. 1.3)
Interfase RS232C de un PC compatible AT equipado con software de pue-sta en marcha (v. Prólogo)
Si es necesario reinicializar un equipo convertidor, proceder de la forma si-guiente:
Dado el caso, salvar los datos de ajuste (parámetros).
Suprimir la protección en escritura: ajustar P–051 a 4H
Iniciar la operación de inicialización: poner P–097 a 0H
Sobreescribir los parámetros en la memoria de parámetros de máquina:poner P–052 a 1H y esperar a la puesta a 0H de P–052.
Reset por apagado o encendido:Desconectar y volver a conectar el equipo 2 s después de que se apague elvisualizador: P–095 o P–096 deberá aparecer en el visualizador.
Efectuar la inicialización (apt. 2.1).
La sustitución del firmware puede realizarse auxiliándose del software interac-tivo de puesta en marcha para módulos de cabezal y módulos de motorasíncrono, a partir de la versión V2.00 o superior.
Dependencia versión firmware/módulo
Versión del firmware Módulo
antes de FW 3.00 6SN1122–0BA1–0AA0
a partir de FW 3.00 6SN1122–0BA11–0AA1
Forma de proceder:
Salvar los parámetros
Sustituir el firmware usando el software de puesta en marcha
Efectuar la inicialización con impulsos y reguladores bloqueados (apt. 2.1).
Recargar los parámetros salvados
Realizar la corrección del offset de potencia (v. tabla 4–1, a partir deFW 3.00 no es necesario)
Transferir parámetros a la memoria de parámetros de máquina (apt. 1.3)
Posibilidades depuesta en marcha
Reinicializacióndel equipo conver-tidor (si es necesa-rio)
Sustitución delfirmware (si es ne-cesario)
Módulos de motor asíncrono (AM)07.9412.941.2 Consejos para la puesta en marcha
04.97

AM
10.00
AM/1-8 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
El software de puesta en marcha permite guardar en disquete los datos de aju-ste del convertidor (parámetros).
Por ello, para la puesta en marcha de otros convertidores en serie, es necesa-rio proceder de la forma siguiente:
1. Efectuar la inicialización
– Activar bloqueo de impulsos y de regulador.
– P–095, introducir código parte de potencia según Tab. 6–1.
Indicación:
Las etapas de potencia con MLFB 6SN112–1A0–A1 se detec-tan automáticamente a partir de FW 3.00. Entonces ya no es posible /necesaria una entrada en P–095.os códigos del motor están memoriza-dos en el disquete por lo que no hace falta introducirlos.
– Arrancar la inicialización.
2. Cargar desde el disquete los datos de ajuste y guardarlos.
3. Realizar la corrección del offset de potencia (v. tabla. 4–1).
Indicación:
A partir de FW 3.00 no es necesario.
4. Salvaguardar.
Puesta en marcha deseries de máquinas,sustitución delmódulo y de compo-nentes
Módulos de motor asíncrono (AM) 07.9407.94
1.2 Consejos para la puesta en marcha

AM
10.00
AM/1-9 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.3 Elementos de mando y señalización, parámetros de mando
Los módulos de motor asíncrono SIMODRIVE 611–A incorporan en su frontallos siguientes elementos de mando y señalización para la puesta en marcha yparametrización:
3 teclas ( + P –y )
un display LCD de 6 cifras
Los parámetros dependientes del escalón de reducción y P–114, que dependede las consignas fijas, se representan por 8 números de subparámetro (p. ej.P–039.1 a P–039.8).
Parámetros dependientes del motor se representan por 4 números de sub-parámetro (P. ej. P–014.1 a P–014.4).
Las funciones de los elementos de mando se presentan en base al ejemplo delparámetro P–039.
– +
P
–
– +
Número de parámetro
Número de subparámetro
Valor de parámetro
+
P
–
+
P
>><<
><
P P– +
>><< P P– +
< >
Elementos demando y señaliza-ción
Módulos de motor asíncrono (AM)07.94
1.3 Elementos de mando y señalización, parámetros de mando
07.94

AM
10.00
AM/1-10 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
Si la operación de carga (P–052) se interrumpe por un corte de red, los valoresmodificados se pierden y el equipo visualiza el código de error “F–07” tras elrestablecimiento de la tensión de red. Una vez acusada la señalización de er-ror “F–07” (v. apt. 5.2.2) es posible ajustar los nuevos valores de los paráme-tros.
Tabla 1-2 Parámetros de mando
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–051P–151
online – 0...FFFF Hex Protección en escrituraSupresión de la protección en escritura por introduc-ción de 4H ó 10H.Supresión de la protección de escritura especial porintroducción de 10H.
P–052P–152
online 4 0...1 Dec Carga de parámetros en FEPROMPoniendo a 1 se cargan los parámetros en la memo-ria de parámetros de máquina del accionamiento,que es no volátil. Tras la carga vuelve a ponerse a 0automáticamente este parámetro.
P–053 online 4 0...FFFF Hex Palabra de mando
Bit Valor
0000H Excitación del relé “Listo” en ausen-cia de fallo y en presencia de desblo-queo de impulsos y de reguladores.
0 0001H Escitación del relé “Listo” en ausen-cia de fallos.
0000HEl juego de parámetros del motor seconmuta tras seleccionar otro motory tras la supresión de impulsos suce-siva (conmutación de motor).
1 0002H El juego de parámetros de motor seconmuta inmediatamente tras selec-cionarse otro motor (conmut. dejuego parám.).
0000H En caso de paro rápido del g. derampas (B.81), al bajarse del valor denmín (P–022) no se produce supre-sión o bloqueo de impulsos.
2 0004H En caso de paro rápido del g. derampas (B.81), al bajarse del valor denmín (P–022) se produce supresión obloqueo de impulsos.
0000H No se corrige en seguimiento el ge-nerador de rampas.
3 0008H Se corrige el generador de rampas.Esta función hace que en un g. derampas ajustado a un valor muyrápido puede reaccionarse inmedia-tamente a un cambio de consigna ensentido opuesto.
Parámetrosde mando
Módulos de motor asíncrono (AM) 07.94
1.3 Elementos de mando y señalización, parámetros de mando
07.94

AM
10.00
AM/1-11 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-2 Parámetros de mando
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–0530 online 4 0...FFFF Hex Palabra de mando
Bit Valor
0000H La señal de bloqueo de reguladoresen B.65 no afecta a los fallos.
5 0020H La señal de bloqueo de reguladoresen B.65 puede utilizarse para acusarfallos.
0000H La vel. real se busca partiendo de lacons. de velocidad. Si se desblo-quean los impulsos cuando el motorestá parado o girando en sentidoopuesto no queda garantizada unaaceleración óptima.
7 0080H La veloc. real se busca partiendo de0. Si se desbloqeuan los impulsos yel motor está girando, en primer lugarse frena; desde el margen en lazocerrado se acelera entonces hasta lavelocidad de consigna.
0000H En caso de limitación de tensión seanula la acción I del reg. de campo.Eventualmente es posible volver aabandonar la limitación de tensión.
8 0100H En caso de limitación de tensión noqueda afectada la acción I del reg. decampo. Sin embargo, no es posibleabandonar automáticamente la limit.de tensión ya que va incre-mentándose continuamente la int.formadora de campo.
0000H Tipo sonda temperatura motorKTY84 según IEC 134
13 2000H Tipo sonda temperatura motor PTCsegún IEC 134; a partir de FW 3.00
0000H Activada la visualización cíclica delnúmero de parámetros en la pantallaLCD
15 8000H Desactivada la visualización cíclicadel número de parámetros en la pan-talla LCD; a partir de FW 3.00
P–090 online 4 0...FFFF Hex Palabra de mando
Bit Valor
0000H Indic. de parám. en formato hexadec.ATENCION¡Límites de ajuste de parámetrosno actuan en formato hexadeci-mal!
0 0001H Indicación de parámetros en formatodecimal o hexadecimal
Módulos de motor asíncrono (AM)07.94
1.3 Elementos de mando y señalización, parámetros de mando
04.97

AM
10.00
AM/1-12 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 1-2 Parámetros de mando
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
0000H Está bloqueada la adaptación de lavel. de transición a debilit. de campoy el par de desenganche a la tensiónen el circuito interm. prescrita enP–061.
2 0004H Está bloqueada la adapt. de la vel. detransición a debil. de campo y el parde desenganche a la tensión en elcirc int. prescr. en P–061 (a partir deFW2.00).
0000H Ciclo regulador velocidad estándar
3 0008H Ciclo regulador de velocidad rápidoCualquier cambio en el bit 3 sóloactúa tras memorizar en FEPROM yRed ON/OFF; a partir de FW 3.00
P–153 online 10 –1...1 Dec Calcular datos del motor/reguladoresAl calcular se modifican determinados parámetros+1 Cálculo datos esquema equivalente–1 Cálculo datos reguladoresUna vez terminados los cálculos vuelve a ponerse a0 automáticamente el parámetro.
Módulos de motor asíncrono (AM) 07.94
1.3 Elementos de mando y señalización, parámetros de mando12.9404.97

AM
10.00
AM/1-13 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.4 Panorámica de datos de ajuste
E1
X42
1
X43
1
X44
1
X45
1E2
E3
E4
E5
E6
E7
E8
E9
56 14 24 8
A11
A21
A31
A41
A51
A61
A91
A92 X1
X2
P–0
12,
P–0
13,
P–0
16,
P–0
17P
–029
, P
–174
P–0
39,
P–0
41,
P–0
50
P–0
31,
P–0
32
P–1
95,
P–1
96,
P–1
97,
Ad
apta
ció
n
P–0
34,
P–0
35P
–115
, P
–116
Gan
anci
a P
P–0
66,
P–0
67,
P–0
68P
–069
, P
–078
, P
–079
AD
P–0
72,
P–0
73,
P–0
74,
P–0
76,
P–0
77,
P–0
80
AD
Var
ian
te 1
Inic
ializ
ació
n
P–1
79,
P–1
81
P–2
06 b
is P
–218
Mín
/Máx
P–0
57,
P–0
58,
P–1
72
Reg
. cam
po
Gan
anci
a P
t. a
cció
n in
teg
ral
P–2
41
P–2
42
P–2
43
P–2
44
P–2
45
P–2
46
P–2
47
P–0
21,
P–0
23,
P–0
27,
P–0
47
P–1
85,
P–1
86,
P–1
87,
P–1
88,
P–1
89,
P–1
90,
P–1
91,
P–1
92,
P–1
93,
P–1
94
P–0
81
P–0
82
P–0
83
P–0
84
P–0
85
P–0
86
P–0
87
P–0
88
P–0
89
P–1
54,
P–1
55,
P–1
56,
P–1
57,
P–1
13
P–0
51,
P–0
52,
P–0
53,
P–0
90,
P–1
51,
P–1
52
P–0
22
Red
on
deo
inic
ial r
amp
aP
–018
Co
nsi
gn
a ve
l., c
anal
1P
–014
, P
–015
, P
–024
P–1
14,
P–1
19
P–1
13
Fu
nci
ón
mo
nit
or
P–2
49,
P–2
50,
P–2
51
P–0
95,
P–0
97
P–0
18,
P–0
36,
P–1
58,
P–1
59,
P–1
60,
P–1
61,
P–1
62,
P–1
63,
P–1
64,
P–1
74,
P–1
75,
P–1
78
P–1
53
Dat
os d
e m
otor
Cál
culo
Opt
imiz
ació
nP
–204
, P
–205
P–0
52S
alva
guar
dar
jueg
o de
dat
os
Dat
os r
egul
ador
es
Dat
os e
sque
ma
equi
vale
nte
Var
ian
te 2
P–0
95,
P–0
97
P–0
18,
P–0
36,
P–1
58,
P–1
59,
P–1
60,
P–1
61,
P–1
62,
P–1
63,
P–1
64,
P–1
74,
P–1
75,
P–1
78
P–1
53C
álcu
lo
Opt
imiz
ació
nP
–204
, P
–205
P–0
52S
alva
guar
dar
jueg
o de
dat
os
Dat
os r
egul
ador
es
Dat
os e
sque
ma
equi
vale
nte
P–1
66,
P–1
67,
P–1
68,
P–1
69,
P–1
70,
P–1
71
P–1
98,
P–1
99,
P–2
03
Co
nsi
gn
a ve
l., c
anal
2P
–014
, P
–019
, P
–025
Co
nsi
gn
as f
ijas
P–1
14P
ote
nci
óm
etro
mo
tori
z.
P–2
19P
–219
Fu
nci
on
esd
e re
lép
rog
ram
.
Inve
rtir
fu
nci
on
es r
elé
Sal
idas
an
aló
gic
as
Hem
bri
llas
med
ida
Fu
nci
on
esd
e re
lé
Bo
rnes
de
des
blo
qu
eop
rog
ram
abl.
Fu
nci
on
es d
e d
iag
nó
stic
o
Fu
nci
ón
reg
istr
ado
r tr
ansi
tori
o
Man
do
I/f
Fu
nci
ón
de
relé
var
iab
le
Um
bra
les
de
man
do
de
relé
Par
ámet
ros
de
man
do
gen
eral
es
Par
ada
sin
gir
oen
sen
t. o
pu
esto
Osc
ilaci
ón
Par
ámet
ros
dein
icia
lizac
ión
Par
ámet
ros
dein
icia
lizac
ión
Dat
os d
e m
otor
Sel
ec.
can
al
Co
ns.
anal
óg
.
Gen
. de
ram
pas
Velo
cid
adm
áxim
a
Reg
ula
do
r d
e ve
loci
dad
Gan
anci
a P,
t. a
cció
n in
teg
ral
Lim
itac
ión
de
par
Reg
ula
do
r d
e in
ten
sid
ad
P
–053
, P
–056
P–1
60,
P–1
61,
P–0
53,
P–0
56
P–1
63,
P–1
78V
igila
nci
a ve
loci
dad
máx
. co
n B
ER
OP
–131
, P–1
32 a
par
tir d
e F
W 3
.00
X41
2
X43
2
Cap
taci
ón
tem
per
atu
ra m
oto
r 27
0P
–063
, P–0
64, P
–065
, P–0
53 B
it 13
a p
artir
de
FW
3.0
0
Op
erac
ión
co
n v
ario
s m
oto
res
Op
. en
par
alel
oC
on
mu
t. ju
ego
s p
arám
.C
on
mu
t. m
oto
res
Figura 1-2 Datos de ajuste
Módulos de motor asíncrono (AM)07.941.4 Panorámica de datos de ajuste
12.94

AM
10.00
AM/1-14 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1.5 Conexiones
PE2PE1W2V2U2
P 600
M 600
X151 X351
+ P –
X411 InterfaseRS232C
M
X431
X421
n22)
n1M
M
X451
CDA 22)
CDA 12)
X441IFRFHSS
Cons. fija Bit 21)
X2X1
IR
663
A91
A92
5614248
6581
E1E2E3E4
E5E6E7E8E99
289A11A21A31A41A51A61672
673674
AS1AS2
TH = 01)
Reset1)
Cons. fija Bit 01)
Cons. fija Bit 11)
Alarma I2t1)
Aceleración terminada1)
CDA 4CDA 3
Común señalizaciones
Hembrillas de medida
Entradas Salidas
Bus interno
Circuito intermedio
Placa de característicasVersión
Display LCD
Contacto señalizaciónBloqueo antiarranque
Listo/Fallo
nreal < nmín1)
nreal < nx1)
Md < Mdx1)
nreal = ncons1)
Escalón bit 01)
Escalón bit 21)Escalón bit 11)
2º límite Md–1)
Tensión desbloqueo
Bornes de conexión motor
X432EntradaBEROFW 3.003)
X412Entradasonda temperaturamotor FW 3.00 3)
Figura 1-3 Conexiones
1) Estado de fábrica de los bornes y funciones de relé programables2) Función no posible en el módulo con ref. 6SN1122–0BA11–0AA03) sólo en el módulo con ref. 6SN1122–0BA11–0AA1. En los módulos con la ref. 6SN1121–0BA1–0AA0 no deberá
ocuparse esta entrada.
Módulos de motor asíncrono (AM) 07.94
1.5 Conexiones
04.97

AM
10.00
AM/2-15 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Determinación y ajuste de la configura-ción del sistema
Precaución
Un valor incorrecto en P–159 a P–176 puede provocar la aceleración del motora velocidades exageradas y hacer inoperantes los B.64 (módulo NE: bloqueocentralizado del accionamiento) y B.65 (bloqueo de regulador).Entonces B.63 (módulo NE: bloqueo centralizado de impulsos) y B.663 (blo-queo de impulsos específico de eje) sólo actúan si están “al aire”, es decir ab-iertos.
2.1 Juegos de parámetros de motores y convertidores
Inicialización
Medición de la tensión en el circuito intermedio
Juego de datos del motor
Márgenes de velocidad
Sinopsis
Módulos de motor asíncrono (AM)2.1 Juegos de parámetros de motores y convertidores
07.94
2

AM
10.00
AM/2-16 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-1 Inicialización
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripcióntiva
g j p
P–095 tras iniciali-zación
– 1...13 Dec Código de parte de potenciaValor por defecto: 7 a partir de FW 3.0 preajuste: 31)
Introducción del código de la parte de potencia(v.apt. 6.2)
P–096.M tras iniciali-zación
– 0...7 Dec Código del motorValor por defecto: 0 (no modificar)
P–097 online – 0...1 Hex Inicialización
Indicación “SEtUP” en el displayEl juego de datos de la parte de potencia selec-cionado se carga en la memoria de datos demáquina.
Visualización “P–000” aparece trasinicialización terminada con éxito.
Tabla 2-2 Medición de la tensión en el circuito intermedio
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–061 online 4 0...700 V Tensión en circuito intermedio fija0 Medición de la tensión en circuito inter-
medio vía módulo NE y bus internoDetectable en: P–061 = 0En el parámetro (P–006) es posible leer elvalor de la tensión en el circuito intermedio
1...700 Introducción del valor de la tensión en elcircuito intermedio actual en caso de utilizar un módulo que no disponga de medición de dicha tensión.
1) Las partes de potencia con ref. 6SN112–1A0–A1 se reconocen automáticamente a partir de FW 3.00.Ya no es posible/necesario introducir el valor de P–095.
Inicialización
Medición de la ten-sión en el circuitointermedio
Módulos de motor asíncrono (AM)2.1 Juegos de parámetros de motores y convertidores
12.94

AM
10.00
AM/2-17 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
En el caso de motores especiales es necesario introducir los datos del mismo.La función de autoajuste descrita en el capítulo 4 permite optimizar seguida-mente los reguladores.
Tabla 2-3 Juego de datos del motor
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–158.M online 4 0,000...65,000 mH Inductancia de la bobina serieSe utiliza en motores con fmáx > 150 Hz
P–159.M online 4 0,0...6535,5 gm2 Momento de inercia de motor y carga específico de la aplicación
Momento inercia total referido al eje del motorCálculo momento inercia motor por P–153 = +1Corrección momento inercia total por P–204 =5 y P–205 = +1
P–219.M online 4 0...15 kgm2 Momento inercia sublementarioEl valor parametrizado se suma internamente conP–159.M. Sólo es necesario ajustar P–219.M en elcaso de que se sobrepase el margen de ajuste deP–159.M.(a partir de FW 2.00)
P–160.M online 4 0,00...650,00 kW Potencia nominal motor 1)
Potencia nominal en caso de servicio S1En caso de motores con refrigeración forzada, v. indicaciones siguientes
P–161.M online 4 0,00...650,00 A Intensidad nominal motor 1)
Intensidad nominal en servicio S1Tipo de conexión o ∆
P–162.M online 4 0,00...650,00 V Tensión nominal del motorDatos de la placa de características1)
Tipo de conexión o ∆
P–163.M online 4 0...65000 r/min Velocidad nominal del motor 1)
Velocidad asíncrona a frecuencia nominal y carganominal; nnom < (fnom ⋅ 60 s/min)/p
P–164.M online 4 0...1200,0 Hz Frecuencia nominal del motor 1)
fnom > nnom ⋅ p/(60 s/min)
P–166.M online 4 0...Inom LT Intens. en vacío del motor Val. esquema equiv.Cálculo por P–153 = +1Corrección por P–204 = 3 y P–205 = +1
P–167.M online 4 0,000...65,000 Ω Resis. estator motor frío Val. esqu. equiv.Cálculo por P–153 = +1
P–168.M online 4 0,000...65,000 Ω Resis. rotor motor frío Val. esquema equiv.Cálculo por P–153 = +1Corrección por P–204 = 6 y P–205 = +1
P–169.M online 4 0,000...65,000 Ω Reactancia dispersa estato Val. esquema equiv.Cálculo por P–153 = +1
P–170.M online 4 0,000...65,000 Ω Reactancia dispersa rotor Val. esquema equiv.Cálculo por P–153 = +1
1) Indicaciones del fabricante según VDE 0530, parte 1
Juego datos motor
Módulos de motor asíncrono (AM)2.1 Juegos de parámetros de motores y convertidores
07.94

AM
10.00
AM/2-18 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–171.M online 4 0,00...650,00 Ω Reactancia campo principal Val. esquema equiv.Cálculo por P–153 = +1Corrección por P–204 = 4 y P–205 = +1
P–172.M online 4 0...32000 r/min Velocidad conmutación lazo cerrado/abiertoCálculo por P–153 = +1
P–173.M online 4 0...32000 r/min Velocidad transición debilitamiento campoCálculo por P–153 = +1En caso de operación con alimentación no regulada yFW<2.00, el valor calculado deberá multiplicarse porel factor (Ured/500V) (corresponde a 0,8 paraUred=400V).A partir de FW2.00, el algoritmo de regulación seadapta automáticamente a la tensión en el circuitointermedio (P–006).La adaptación automática puede desactivarse po-niendo a 0 el bit 2 en P–090.
P–174.M online 4 0...32000 r/min Velocidad máxima motor 1)
Para optimización de intensidad en vacío, ajustarnmáx(fnom60 s/min)/p, si no “F–60” (p=número depares de polos)
P–175.M online 4 0,0...500,0 min Constante de tiempo térmica motor 1) 2)
P–176.M online 4 0...32000 r/min Velocidad actuación par desengancheCálculo por P–153 = +1En caso de operación con alimentación no regulada yFW<2.00, el valor calculado deberá multiplicarse porel factor (Ured/500V)2 (corresponde a 0,64 paraUred=400V).A partir de FW2.00, el algoritmo de regulación seadapta automáticamente a la tensión en el circuitointermedio (P–006).La adaptación automática puede desactivarse po-niendo a 0 el bit 2 en P–090.
P–178.M online 4 0,000...1,000 Factor de potencia cos ϕ 1)
P–018.M online 4 4,00...100,00 ms Redondeo inicialEn motores con rotor de desplazamiento de corriente:incrementar el parámetro a apróx. 30 ms.
P–036.M online 4 0...7 Hex Frecuencia pulsación convertidorSi se incrementa la frecuencia de pulsación se mejorala respuesta dinámica del regulador de intensidad,pero se disminuye la capacidad de carga permanentepermitida. La frecuencia de pulsación deberá, particu-larmente en motores de alta velocidad, seleccionarseun valor lo más alto posible, pero observando la re-ducción de potencia necesaria en este caso. Si semodifica la frecuencia de pulsación es necesario reop-timar también el regulador de intensidad.
1) Indicación del fabricante conforme a VDE 0530, parte 12) Sólo si se utiliza la función reproducción de la temperatura del motor para función del relé 5 (prealarma I2t)
Módulos de motor asíncrono (AM)2.1 Juegos de parámetros de motores y convertidores
03.96

AM
10.00
AM/2-19 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
P–153 online 4 –1...1 Dec Cálculo datos de esquema equivalente del motoractualAjustar +1 con bloqueo de impulsos en borne 63 ó663.Se lanzan los cálculos para el motor especial indicado.
P–153 online 4 –1...1 Dec Cálculo datos regulador del motor actualAjustar –1 con bloqueo de impulsos en borne 63 ó 663Se lanzan los cálculos para el motor especial indicado.
En caso de motores de alta velocidad, incrementar la limitación de velocidad P–029 = 6000 r/min a la velocidadmáxima.
Indicación
El tipo de conexión del motor se seleccionará de forma que ni la tensión enbornes necesaria sobrepase la tensión de salida máxima del convertidor ni elmódulo AM funcione con Inom motor < 0,1 Ipermanente módulo (v. ejemplos 1 y 2).
Ejemplo 1
Si un motor con Unom 230 V /400 V se conecta en a un módulo de alimen-tación no regulado, entonces, debido a la velocidad de transición a debilita-miento de campo (P–173) reducida y a la velocidad de actuación del par dedesenganche (P–176), en una red de 400 V no alcanza la misma potencia quesi operase conectado a un módulo E/R regulado con tensión en circuito inter-medio UCI = 600V / 625 V.
Si el motor se conecta en triángulo, entonces alcanza la potencia nominal plenaen caso de convertidor dimensionado para Inom motor.
Ejemplo 2
Si se desea operar un motor en con la intensidad nominal Inom motor < 0,1 Ipermanente módulo, éste puede adaptarse al módulo AM con-ectándolo en si se tiene:
Inom motor 0,1 Ipermanente módulo
Módulos de motor asíncrono (AM)2.1 Juegos de parámetros de motores y convertidores
07.94

AM
10.00
AM/2-20 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
Si en base a las informaciones de la placa de características sólo están dispo-nibles datos para servicio S6, éstos deberán transformarse convenientementepara la parametrización en servicio S1; tras la optimación deberán elevarse loslímites. En el caso de motores con refrigeración forzada, los datos de la placade características deberán transformarse a datos para servicio S1 de un motorautorefrigerado por aire del mismo tamaño; tras la optimación deberán incre-mentarse los límites.
Conversión de datos de placa de características
Cálculo de la intensidad en vacío I0, v. apt. 4
Cálculo de la intensidad nominal para servicio S1: Inom S1 = (2...2,5) I0
Cálculo de la potencia nominal para servicio S1: Pnom S1 = Pnom S6 Inom S1
Inom S6
Puesta en marcha con valores para S1 y optimación conlímites 100 %
Incrementar los límites para operar en servicio S6 o para operar con refrig-eración forzada.
Módulos de motor asíncrono (AM)2.1 Juegos de parámetros de motores y convertidores
07.94

AM
10.00
AM/2-21 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-4 Márgenes de velocidad
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripcióntiva
g j p
P–172.M online 4 0...32000 r/min Velocidad de conmutación lazo cerrado/abiertoComienzo del margen con velocidad reguladaPor encima de esta velocidad + la histéresis, la veloci-dad se regula conforme a la velocidad real calculada.
P–173.M online 4 0...32000 r/min Velocidad transición debilitamiento campoComienzo del debilitamiento del campoA partir de esta velocidad, le tensión y la frecuencia desalida del convertidor no son ya proporcionales.
P–176.M online 4 0...65535 r/min Velocidad actuación par de desengancheAquí comienza la reducción de potenciaPor encima de esta velocidad se reduce la potencia enel margen con debilitamiento de campo para evitar eldesenganche (campo ya no arrastra al rotor) del mo-tor.
P
U
Ψnom
FM Mnom
M
FP Pnom
Velocidad motor nFPFM
nFS ndeseng nmáx0 ncon
P Característica de potenciaU Característica de tensiónY Característica de flujoM Característica de parncon Velocidad conmutación lazo
cerrado/abiertonnom Velocidad nominalndeseng Velocidad actuación par
desenganchenFS Velocidad transición
debilitamiento camponmáx Velocidad máxima motor
Las limitaciones de par y potencia pueden modificarse con el factor FM (parámetro P–039, P–041 ) o FP (P–060). Conello resultan los siguientes márgenes de velocidad:
Ψ
nnom ⋅
0 |n| ncon Margen de velocidad en lazo abierto
ncon |n| nnom FP/FM Margen con par constante
nnom FP/FM < |n| ndeseng Margen con potencia constante
|n| > nFS Margen con debilitamiento de campo
ndeseng < |n| < nmáx Margen desenganche (no estable), margen tensión de salida máxima
Márgenes de velocidad
Módulos de motor asíncrono (AM)2.1 Juegos de parámetros de motores y convertidores
07.94

AM
10.00
AM/2-22 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.2 Aplicaciones estándar
2.2.1 Visualización de estadoLos parámetros P–000 y P–100 sirven para indicar el estado momentáneo delequipo convertidor.
Tabla 2-5 Visualización de estado
Display
Grupo funcional
Nº del motor Función relé Modo Estado convert. Origen consigna Escalón
Selección de mo-tor 1...4 vía fun-ción de borne pro-gramableP–081...P–089=20, 21
Motor 1 seleccionado
Motor 2 seleccio-nado
Motor 3 seleccio-nado
Motor 4 seleccio-nado
Función relé 5programableborne A51P–245Alarma I2t 1)
Función relé 6programableborne A61P–246Aceleración ter-minada1)
SeñalizaciónList/FalloBornes 672 a674P–053Listo1)
Función relé 1programableborne A11P–241nreal = ncons
1)
Función relé 2programableborne A21P–242|Md| < Mdx
1)
Función relé 3programableborne A31P–243|nreal| < nmín
1)
Función relé 4 programableborne A41P–244|nreal| < nx
1)
El segmento lucecuando se excita el relé correspon-diente.
Todas lasseñales dedesbloqueopresentes:operación enlazo abierto ocerrado
Accionamientono desblo-queado:condición decontinuación, v.columna“Estado e. con-vertidor”
Falta desblo-queo de impul-sos en móduloNE(B.63/B.48)
Falta desblo-queo de impul-sos para eje(B.663)
Falta desbloqueoregul. en móduloNE (B.64) y/odesbloqeuo re-gul. en móduloHS (B.65)
Falta desblo-queo genera-dor de rampas(B.81)
Falta desblo-queo consigna(borne progra-mable nº función 16)
Funciona-miento comomotor
Funciona-miento comogenerador
Indicación del modocon motor desblo-queado:
Actúa ciclorápido regul.de velocidad
Consigna analóg.Canal 1 P–113=1Canal 2 P–113=2Can. 1+2 P–113=3
Consigna analóg.+ consigna fijaCanal 1 + funciónborne programa-ble 17, 18, 19, 24 P–113=9ConsignaCero P–113=0 P–113=7 P–113=8
Selección vía funciónde borne program.P–081...P–089=17, 18, 19, 24Ajuste velocidad conP–114.1...7,P–119.1...8
Consigna descritapor potenciómetromotorizadoP–113=6P–114.8 veloc. óP–081...P–089=14, 15
Consigna pre-scrita por genera-dor de oscilaciónP–113=4 óP–081...P–089=2P–154, P–155 Ve-locidadesP–156, P–157 Temporizaciones
Consigna pre-scrita por el soft-ware de autoopti-mizaciónP–204=1...6P–205=1
Consignafija 1...7
Consignafija 8...15
Escalón de re-ducción 1 seleccionado
Escalón de re-ducción 2 seleccionado
Escalón de re-ducción 3 seleccionado
Escalón de re-ducción 4 seleccionado
Escalón 1...8selección por fun-ción de borne pro-gramableP–081...P–089=9, 10, 11
Escalón de re-ducción 5 seleccionado
Escalón de re-ducción 6 seleccionado
Escalón de re-ducción 7 seleccionado
Escalón de re-ducción 8 seleccionado
1) Estado de fábrica
Módulos de motor asíncrono (AM)2.2 Aplicaciones estándar
12.94

AM
10.00
AM/2-23 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.2.2 Versión de firmware
Tabla 2-6 Versión de firmware
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
(P–099) – – 0,00...99,99 Versión de firmwareMuestra la versión del firmware cargado.
2.2.3 Parámetros de ajuste para aplicaciones estándar
Valores de ajuste de velocidad
Vigilancia velocidad máxima mediante BERO
Límites de par
Vigilancia sobretemperatura en motor
Imagen de la temperatura del motor
Oscilación de cabezal para engrane
Tabla 2-7 Valores de ajuste de velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–022.M online 4 2...16000 r/min Umbral de bloqueo de impulsosCon bloqueo del regulador, cuando la velocidad bajede este umbral se anula la corriente de salida delequipo convertidor (parada sin giro en sent. opue-sto).
P–029.G online 4 0...32000 r/min Limitación de velocidadLa velocidad del motor actual se limita al valor límiteajustado para el escalón actual.Selección vía función de borne programable 9, 10,11.
En X432 es posible conectar un detector de proximidad BERO para vigilar lavelocidad máxima. Cuando se supera el umbral de desconexión, se emiteseñal de bloqueo de impulsos y el aviso de fallo F–90 a partir de FW 3.00.
Sinopsis
Valores de ajustede velocidad
Vigilancia de velo-cidad máxima me-diante BERO
Módulos de motor asíncrono (AM)2.2 Aplicaciones estándar
07.94

AM
10.00
AM/2-24 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Si para una velocidad calculada superior a 1200 1/min / número de rayas nollegan más impulsos del BERO, cabe suponer una rotura en el cable. En estecaso se visualiza también el aviso F–90.
Tabla 2-8 Vigilancia de rotura de cable
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–131.M online 4 0...10 r/min Número de rayas vigilancia de velocidad por BEROSi el valor es 0, está desactivada la vigilancia develocidad.
P–132.M online 4 0...65535 r/min Umbral de desconexión de la vigilancia de velocidadpor BERO
Tabla 2-9 Límites de par
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–039.G online 4 0...399 % 1er límite de parLimitación de par al porcentaje ajustado referido alpar nominal del motor actual.
P–041.G online 4 0...399 % 2º límite de parLimitación de par al porcentaje ajustado referido alpar nominal del motor actual. Swlwcción del segundolímite de par vía borne programable con la función 1y en caso de velocidad superior a P–050, velocidadde conmutación de Md1 a Md2
En X412 puede conectarse una sonda de temperatura en el motor. (a partir de FW 3.00)
Tipos de sondas de temperatura
A elección entre KTY84: la resistencia medida se convierte en una temperatura. La tempera-
tura máxima permitida puede parametrizarse. PTC: resistencias medidas inferiores a 1330 Ohm se interpretan como per-
mitidas; resistencias superiores a 1330 Ohm como sobretemperatura.
Comportamiento de alarma y desconexión tras aprox. 1s: relé “Prealarma sobretemperatura en motor”
tras temporización en P–065: bloqueo de impulsos y aviso de fallo F–14
Corte o cortocircuito en cable a la sonda KTY84: si se miden temperaturas inferiores a 0 °C o superiores a aprox.
200 °C, hay bloqueo de impulsos y aviso de fallo F–19 PTC: no es posible detectar corte o cortocircuito en el cable a la sonda.
Vigilancia de ro-tura de cable
Limites de par
Vigilancia de tem-peratura en motor
Módulos de motor asíncrono (AM) 04.972.2 Aplicaciones estándar

AM
10.00
AM/2-25 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-10 Vigilancia de temperatura en motor
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–053.M online 4 0...FFFFhex Palabra de mandoBit Valor13 0000H tipo de sonda de temp. en motor KTY84
2000H tipo de sonda de temp. en motor PTC
P–063.M online 4 0...170 grados C Temperatura en motor máximasólo actúa para KTY84. En el caso de PTC no esposible parametrizar el umbral de desconexión
P–064.M online 4 0...170 grados C Temperatura fijaSi se ajusta el valor 0, se activa la vigilancia de tem-peratura en motor.
P–065.M online 4 0...600s Temporización para alarma de temperatura enmotor
Tabla 2-11 Imagen de la temperatura del motor
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–175.M online 4 0,0...500 min Constante de tiempo térmica del motorPara la función de relé programable 5 Vigilancia I2t
Indicación
Para cada juego de parámetros de motor se calcula un modelo de temperaturapropio.
Sin embargo no es posible considerar magnitudes como el efecto del ventila-dor y de la temperatura del aire de entrada. Por ello es preferible recurrir a unavigilancia de temperatura a través de una sonda incorporada en el motor.
Imagen de la tem-peratura del motor
Módulos de motor asíncrono (AM)07.942.2 Aplicaciones estándar

AM
10.00
AM/2-26 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-12 Oscilación de cabezal para engrane
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–154 online 4 –32000...32000 r/min
Consigna de oscilación 1
P–155 online 4 –32000...32000 r/min
Consigna de oscilación 2
P–156 online 4 0,002...60 s Intervalo de oscilación 1
P–157 online 4 0,002...60 s Intervalo de oscilación 2
Selección vía función de borne programable 2 óP–113=4
Velocidad [r/min]
Tiempo [s]
P–154
P–155
P–156 P–157
Oscilación de ca-bezal para engrane
Módulos de motor asíncrono (AM) 07.942.2 Aplicaciones estándar

AM
10.00
AM/2-27 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3 Operación con varios motores
También es posible combinar entre sí las aplicaciones siguientes:
Operación con motores en paralelo
Conmutación de juego de parámetros
Conmutación de motores
Tabla 2-13 Selección motor
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–056 online 4 0...4 Selección motorSelección del motor actual0 Selección vía
función de borne programable 20, 21.1...4 Motor 1...4 activo
Indicación
Si en P–053 bit 1 = 0, la conmutación sólo se realiza tras el bloqueo de impul-sos.
2.3.1 Operación con motores en paralelo
Desde un módulo AM es posible alimentar varios motores conectados en para-lelo. En este caso, los motores se alimentan con la misma tensión y frecuencia.Por ello todos ellos deberán tener la misma característica tensión – frecuencia,es decir deberá ser igual la relación entre la tensión y la frecuencia nominalesde cada uno de los motores. En caso de motores diferentes no conviene sobre-pasar una relación de potencia 1 : 10 entre los extremos.
Si los motores conectados en paralelo tienen todos ellos el mismo número depares de polos, entonces girarán con aproximadamente la misma velocidad.
Precaución
En caso de carga diferente, las velocidades se diferenciarán también en elvalor del deslizamiento, es decir, un motor individual se desvía de la velocidadcalculada para el sistema global con lo que puede sobrepasar un eventuallímite de velocidad ajustado.
Selección motor
Módulos de motor asíncrono (AM)2.3 Operación con varios motores
07.94

AM
10.00
AM/2-28 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
En motores conectados en paralelo, el peligro de desenganche es mayor queen caso de motores individuales. Para poder corregir mejor el efecto de golpesde carga se recomienda incrementar el límite de intensidad P–059 al 150 % dela intensidad suma. Si también se exige par nominal estacionario en el margeninferior de velocidades es necesario elevar también el ajuste de P–057 (intensi-dad en margen en lazo abierto). El módulo AM deberá dimensionarse para estaintensidad; también deberá preverse y garantizarse una refrigeración adecuadade los motores.
En el caso de motores conectados en paralelo sólo es posible medir la intensi-dad total que se reparte, dependiendo de la carga respectiva, entre los diferen-tes motores. Por ello conviene vigilar éstos individualmente de forma térmica.Si responde una vigilancia, las líneas de potencia no deberán abrirse sin haberbloqueado previamente los impulsos de salida.
En caso de motores especiales de alta velocidad (fmáx > 150 Hz) se recom-ienda intercalar una bobina entre el módulo AM y los motores conectados enparalelo.
M13~
M23~
M33~
Motor 1 Motor 2 Motor 3 Motor 8
1)
M83~
Desbloqueo de impulsos
ϑ ϑ ϑ ϑ
ϑ > B.663
1) sólo necesaria para motores especiales de alta velocidad
SIMODRIVE 611sistema analógico
Módulo AM
U2 V2 W2
Figura 2-1 Módulo AM de SIMODRIVE 611 sistema analógico alimentando motores enparalelo
Módulos de motor asíncrono (AM)2.3 Operación con varios motores
07.94

AM
10.00
AM/2-29 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Para operación en paralelo es necesario prescribir los datos de los moto-res de la forma siguiente:
Tabla 2-14 Operación de motores en paralelo
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–158.M online 4 0,000...65,000 mH Inductancia de la bobina serieUso en caso de motores con fmáx > 150 Hz.
P–160.M online 4 0,00...650,00 kW Potencia nominal motor 1)
Suma de las potencias nominales en servicio S1∑ Pnom i = Pnom total
P–161.M online 4 0,00...650,00 A Intensidad nominal motor 1)
Suma de las intensidades nominales en servicio S1 ∑ Inom iTipo de conexión Y o ∆
P–162.M online 4 0,00...650,00 V Tensión nominal motor 1)
Tensión nominal de la característica U/f comúnTipo de conexión Y o ∆
P–163.M online 4 0...65000 r/min
nnom i
Velocidad nominal motor 1)
Promedio ponderado de la velocidad nominal
Velocidad asíncrona a frecuencia y carga nomina-les nnom < (fnom ⋅ 60 s/min)/p
∑Pnom i
Pnomtotal
.
P–164.M online 4 0...1200,0 Hz Frecuencia nominal motor 1)
Frecuencia nominal de la característica U/f comúnfnom > nnom ⋅ p/(60 s/min)
P–174.M online 4 0...32000 r/min Velocidad máx. motor Dato fabricanteVelocidad máx. inferior del conjunto de motores redu-cida en la diferencia de delizamiento máximaPara optimizar intensidad en vacío ajustarnmáx(fnom ⋅ 60 s/min)/p, si no “F–60” (p=número depares del motor)
P–178.M online 4 0,000...1,000 Factor de potencia cos ϕ 1)
promedio ponderado del factor de potencia
∑Inom i
Inomtotalcos ϕ i.
P–018.M online 4 4,0...100,00 ms Redondeo inicial específico de aplicaciónEn motores con rotor de desplazamiento de corriente:incrementar el parámetro a aprox. 30 ms
P–036.M online 4 0...7 Hex Frecuencia pulsación onduladorSi se incrementa la frecuencia de pulsación se me-jora la respuesta dinámica del regulador de intensi-dad, pero se disminuye la capacidad de carga perma-nente permitida. La frecuencia de pulsación deberá, particularmenteen motores de alta velocidad, seleccionarse un valorlo más alto posible, pero observando la reducción depotencia necesaria en este caso. Si se modifica la frecuencia de pulsación es necesa-rio reoptimar también el regulador de intensidad.
1) Indicación del fabricante conforme a VDE 0530, parte 1
Módulos de motor asíncrono (AM)2.3 Operación con varios motores
03.96

AM
10.00
AM/2-30 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Atributos de parámetros
Número Modif.activa
P–051 Margen de ajuste Descripciónactiva
g j p
P–159.M online 4 0,0...6535,5 gm2 Momento de inercia motor y carga específico de aplicaciónSuma de los momentos de inercia referidos al eje delmotorCálculo momento de inercia motor por P–153 = +1Corrección momento de inercia motor por P–204 = 5y P–205 = +1
P–219.M online 4 0...15 kgm2 Momento de inercia suplementarioEl valor parametrizado se suma internamente conP–159.M. Sólo es necesario ajustar P–219.M en elcaso de que se sobrepase el margen de ajuste deP–159.M.
P–166.M online 4 0...Inom LT Intens. en vacío del motor Val. esquema equiv.Cálculo por P–153 = +1Ajuste por P–204 = 3 y P–205 = +1
P–167.M online 4 0,000...65,000 Ω Resis. estator motor frío Val. esquema equiv.Cálculo por P–153 = +1
P–168.M online 4 0,000...65,000 Ω Resis. rotor motor frío Val. esquema equiv.Cálculo por P–153 = +1Corrección por P–204 = 6 y P–205 = +1
P–169.M online 4 0,000...65,000 Ω Reactancia dispersa estator Val. esquema equiv.
Cálculo por P–153 = +1
P–170.M online 4 0,000...65,000 Ω Reactancia dispersa rotor Val. esquema equiv.Cálculo por P–153 = +1
P–171.M online 4 0,00...650,00 Ω Reactancia campo principal Val. esquema equiv.
Cálculo por P–153 = +1Corrección por P–204 = 4 y P–205 = +1
P–175.M online 4 0,0...500,0 min Constante de tiempo térmica motor Dato fabricanteConstante de tiempo más reducida del grupo de mo-tores. Se recomienda utilizar vigilancia individualexterna en cada motor. V. apt. 2.2.3
P–172.M online 4 0...32000 r/min Velocidad conmutación lazo cerrado/abiertoCálculo por P–153 = +1
Módulos de motor asíncrono (AM) 07.942.3 Operación con varios motores

AM
10.00
AM/2-31 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–173.M online 4 0...32000 r/min Velocidad transición debilitamiento campoCálculo por P–153 = +1En caso de operación con alimentación no reguladay FW<2.00, el valor calculado deberá multiplicarsepor el factor (Ured/500V) (corresponde a 0,8 paraUred=400V).A partir de FW2.00, el algoritmo de regulación seadapta automáticamente a la tensión en el circuitointermedio (P–006).La adaptación automática puede desactivarse po-niendo a 0 el bit 2 en P–090.
P–176.M online 4 0...32000 r/min Velocidad actuación par desengancheCálculo por P–153 = +1En caso de operación con alimentación no reguladay FW<2.00, el valor calculado deberá multiplicarsepor el factor (Ured/500V)2 (corresponde a 0,64 paraUred=400V).A partir de FW2.00, el algoritmo de regulación seadapta automáticamente a la tensión en el circuitointermedio (P–006).La adaptación automática puede desactivarse po-niendo a 0 el bit 2 en P–090.
Módulos de motor asíncrono (AM)12.942.3 Operación con varios motores

AM
10.00
AM/2-32 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.3.2 Conmutación del juego de parámetros
El módulo AM permite tener memorizados cuatro juegos completos de paráme-tros de motor. La selección del juego de datos actual puede realizarse víabornes programables (v. apt. 3.3.2) o por el parámetro P–056. Si se desea car-gar diferentes juegos de parámetros en el módulo AM, estas funciones puedenaprovecharse para conmutar de juego de parámetros. El juego de parámetrosdel motor actual se indica en la primera posición izquierda de la visualizaciónde estado (P–000, P–100).
Si en el parámetro P–053, bit 1 = 1, la conmutación de los juegos de paráme-tros del motor puede realizarse también estándo desbloqueados los impulsos.Esta posibilidad puede aprovecharse para adaptar los datos del motor y losreguladores.
2.3.3 Conmutación de motores
El módulo AM permite tener memorizados cuatro juegos completos de paráme-tros de motor. La selección del juego de datos actual puede realizarse víabornes programables (v. apt. 3.3.2) o por el parámetro P–056. Para los cuatrojuegos de parámetros de motor existen funciones de relé programables(v. apt. 3.3.1) que señalizan el juego de datos activo.
Si se desea alimentar sucesivamente diversos motores desde el módulo AM,estas funciones pueden aprovecharse para conmutar entre los mismos.
Para ello es necesario ajustar en el parámetro P–053, bit 1 = 0. Tras la ordende conmutación de motor, los datos sólo se conmutan están bloqueados losimpulsos del módulo AM (v. apt. 1.3). El usuario puede elegir qué borne de des-bloqueo se utilizará para bloquear los impulsos. Durante la operación de con-mutación de parámetros el bloqueo de impulsos queda enclavado duranteaprox. 20 ms.Seguidamente se anula el enclavamiento y se excita el relé “motor ... activo” delnuevo motor cargado. Esta señalización por relé puede utilizarse para mandarcontactores destinados a conmutar de motor. El juego de parámetros de motoractual se indica en la primera posición izquierda de la visualización de estado(P–000, P–100).
La figura siguiente muestra una propuesta de esquema de un circuito demando por contactores para conmutar de motor. En este caso, los bornes pro-gramables En tienen asignada la función 20 “Selección motor bit 0” y En la fun-ción de borne 21 “Selección motor bit 1” y los relés programables Aw, Ax, Ay,Az las funciones de relé 11, 12, 13, 14 “motor 1, 2, 3, 4 activo”. Si bien el soft-ware del módulo AM garantiza el enclavamiento mutuo de los relés, el es-quema de enclavamiento de contactores propuesto garantiza el que incluso encaso de errores de parametrización no haya más que un motor conectado a losbornes del convertidor.
Módulos de motor asíncrono (AM)2.3 Operación con varios motores
07.94
2.3 Operación con varios motores

AM
10.00
AM/2-33 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
K3K2
1
K1H K2H K3H K4H
U2 V2 W2
SIMODRIVE 611–ASistema analógico
Módulo AM
K1H K2H K3H K4H
K1K2K4
K1K3K4
K2K3K4
M13 ~
M23 ~
M33 ~
K2 K3 K4K1
K1K2K3
Motor 4Motor 1 Motor 2 Motor 3
En
Em0 1 0
0 0 1 1
Entradaborne prog.
AwAxAyAz
Desbloqueo deimpulsos
K1
Salidas relé
Bit 0
Bit 1
Selección motor
M43 ~
K4 P–053 Bit 1 = 0
1)
B.663
1 3 42
1) sólo necesaria para motores especiales de alta velocidad
Figura 2-2 Conmutación de motores
Módulos de motor asíncrono (AM)07.9407.942.3 Operación con varios motores

AM
10.00
AM/2-34 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.4 Operación con motores con velocidad máxima > 32000 r/min
Número de rayas P131
Precaución
Todos los parámetros que representan físicamente una velocidad con la uni-dad r/min así como el número de rayas en BERO P131, se ajustan o visualizanmultiplicados por el factor de reducción que se indica a continuación:
Velocidad máx. motor Factor
32000...64000 r/min 1/2
> 64000 r/min 1/3
Para poder operar con motores con una velocidad máxima > 32000 r/min esnecesario realizar los ajustes conformes a la tabla 2-15.
Ajuste de paráme-tros
Módulos de motor asíncrono (AM) 07.94
2.4 Operación con motores con velocidad máxima > 32000 r/min12.94

AM
10.00
AM/2-35 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 2-15 Operación con motores con velocidad máxima > 32000 r/min
Atributos de parámetros
Número Modif.activa
P–051 Margen de ajuste Descripciónactiva
g j p
P–163.M online 4 0...64000 r/min Velocidad nominal motor 1)
Velocidad asíncrona a frecuencia y carga nominalesnnom < (fnom ⋅ 60 s/min)/p
Velocidad máx. motor Ajuste
32000...64000 r/min Velocidad nominal motor / 2
> 64000 r/min Velocidad nominal motor / 3
P–174.M online 4 0...64000 r/min Velocidad máx. motor 1)
Velocidad máx. motor Ajuste
32000...64000 r/min Velocidad máx. motor / 2
> 64000 r/min Velocidad máx. motor / 3
P–153 online 4 –1 ... 1 Dec Cálculo datos esquema equivalente motor actualAjustar +1 con bloqueo de impulsos en borne 63 ó 663.Se lanzan los cálculos para el motor especial indicado.Se calculan los datos del esquema equivalente siguientes:
Velocidad máx. motor Datos esquema equivalente
32000...64000 r/min P–159: Momento de inercia de mo-tor y carga 4
> 64000 r/min P–159: Momento de inercia de mo-tor y carga 9
P–153 online 4 –1 ... 1 Dec Cálculo datos reguladores del motor actualAjustar –1 con bloqueo de impulsos en borne 63 ó 663Se lanzan los cálculos para motor especial indicado. Se calcu-lan los datos de reguladores siguientes:
Velocidad máx. motor Datos regulador
32000...64000 r/min P–114: Velocidad útil máx.motor 1/2P–029: Limitación velocidad 1/2P–172:Vel. conmut. lazo cerr./abierto 1/2P–173:Vel. transición debilit. campo 1/2P–176:Vel. actuación par desenganche 1/2
> 64000 r/min P–114: Velocidad útil máx.motor 1/3P–029: Limitación velocidad 1/3P–172:Vel. conmut. lazo cerr./abierto 1/3P–173:Vel. transición debilit. campo 1/3P–176:Vel. actuación par desenganche 1/3
Si se ajustan a mano valores de velocidad con la unidad r/min, todos los valo-res deberán multiplicarse por el factor 1/2 ó 1/3.
1) Indicación del fabricante conforme a VDE 0530, parte 1
Módulos de motor asíncrono (AM)2.4 Operación con motores con velocidad máxima > 32000 r/min
03.96

AM
10.00
AM/2-36 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.5 Función monitor
Los parámetros P–249 a P–251 permiten leer los contenidos de las direcciones(datos en área RAM) del módulo de motor asíncrono.
Indicación
En el anexo (apt. 6.5) figura una lista de las principales magnitudes de medida(variables en RAM) con sus direcciones.
Tabla 2-16 Función monitor
Ajuste de parámetros
Número Modif.acti a
P–051 Margen de ajuste Descripciónactiva
g j p
P–249 online 10 0...FFFF Hex Segmento célula memoria monitorDirección de segmento en una célula de RAM
P–250 online 10 0...FFFF Hex Dirección célula memoria monitorDirección de offset en una célula de RAM
(P–251) – – 0...FFFF Hex Vis. valor célula memoria monitorContenido de una célula en RAM
Módulos de motor asíncrono (AM) 07.94
2.5 Función monitor

AM
10.00
AM/3-37 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Parametrización de las interfases del con-vertidor
3.1 Interfases de consigna de velocidad
Selección del canal de consigna de velocidad
Normalización de la consigna analógica de velocidad
Consignas fijas/consigna potensiómetro motorizado
Prioridad de consignas
Tabla 3-1 Selección del canal de consigna de velocidad
Atributos de parámetrosM d jNúmero Modif. ac-
tivaP–051 Margen de aju-
steDescripción
tiva step
P–113 online 4 0...9 Hex Selección canal de consigna de velocidad
0H: Consigna digital 0
1H: Consigna analógica, canal 1, B.56/14
2H: Consigna analógica, canal 2, B.24/8
3H: Consigna analógica, suma canal 1 + canal 2,B.56/14 + B.24/8
4H: Consigna digital prescrita por emisor deoscilación
6H: Consigna digital prescrita por potenciómetromotorizado
9H: Suma consigna analógica + consigna fija, canal 1 + consigna fija de función de borneprogramable 17, 18, 19, 24
(10)H: Consigna digital; es prescrita internamente porel firmware tras la autooptimización
Sinopsis
Selección canalde consigna de ve-locidad
Módulos de motor asíncrono (AM)3.1 Interfases de consigna de velocidad
12.94
3

AM
10.00
AM/3-38 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-2 Normalización de consigna analógica de velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–014.M online 4 –32000...32000 r/min
Velocidad útil máxima del motorVelocidad alcanzada a la tensión de entradaanalógica ajustada en P–024 (canal 1 activo) o enP–025 (canal 2 activo).P–114 > 0 = giro horario para consigna de velocidadpositivaP–114 < 0= giro antihorario para cons. de velocidadnegativa
P–024 online 4 2...10 V Normalización de consigna canal 1Tensión analóg. de la consigna de velocidad paraP–014
P–015 online 4 E000...2000 Hex Corr. de offset de consigna de velocidad canal 1p. ej. valor de corrección positivo 002FH
valor de corrección negativo FF00H
P–025 online 4 2...10 V Normalización de consigna canal 2Tensión analóg. de la consigna de velocidad paraP–014
P–019 online 4 E000...2000 Hex Corr. de offset de consigna de velocidad canal 2p. ej. valor de corrección positivo 002FH
valor de corrección negativo FF00H
Tabla 3-3 Consignas fijas, consigna potenciómetro motorizado
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–114.F online 4 –32000...32000 r/min
Consigna fija 1 a 7Consigna de velocidad prefijadaSelección vía función de borne programable 17, 18,19 (v. apt. 3.2.2).
P–119.F online 4 –32000...32000 r/min
Consigna fija 8 a 15Consigna de velocidad prefijadaSelección vía función de borne programable 17, 18,19, 24 (v. apt. 3.2.2), a partir de FW 2.00
P–114.8 online 4 –32000...32000 r/min
Consigna potenciómetro motorizadoConsigna de velocidad modificable por potencióme-tro motorizado simulado electrónicamente; las fun-ciones “Subir” y “Bajar” se asignan a las funcionesde bornes programables 14 y 15 (v. apt. 3.2.2).
Normalización deconsignaanalógica de velo-cidad
Consignas fijas,consigna poten-ciómetro motori-zado
Módulos de motor asíncrono (AM)3.1 Interfases de consigna de velocidad
12.94

AM
10.00
AM/3-39 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-4 Prioridad de consignas
Prioridad Consigna Fuente de consignaEfecto
seleccionada vía DesignaciónEfecto
alta IMot = 0 B.63 óB.663
abierto Desbloqueo de impul-sos inhibido
Al no recibir impulsos de alimentación, el mo-tor se para de forma natural
n = 0 B.81 abierto Paro rápido genera-dor rampas
Frenado sin rampadesbloqueo o bloqueo de impulsos
n = 0 B.64 óB.65
abierto Desbl regul. inhibido Frenado con rampa, bloqueo de impulsos
n = 0 Fcn. B. 16 abierto Desbl. consigna inhib. Frenado con rampa, desbloqueo de impulsos
n ≥ nmín P–030 ajustede valor
Velocidad mín. esta-cionaria
Velocidad mín. aunque haya una consigna develocidad inferior pero de menor prioridad
n n P–054P–055
ajustede valor
Banda muerta Dentro de la banda muerta de velocidades noes posible un funcionamiento estacionario
n = +n/–n Fcn. B. 12 activ. Giro horario/antihora-rio
Sólo es posible un sentido de giro
n = P–114.8 P–113 = 6 ajustede valor
Función potencióme-tro motorizado
Subir/bajar consigna
n1 = P–154n2 = P–155
Fcn. B. 2 mando Oscilación Oscilación de cabezal para engrane
n1 = P–114.1an7 = P114.7n8 = P–119.1an15 =P–119.8
Fcn. B. 17Fcn. B. 18Fcn. B. 19Fcn. B. 24
mando Consigna fija Se utiliza una velocidad prefijada
baja Fuente decons. estánd.
P–113 ajustede valor
Consigna estándar Consigna estándar parametrizada
Prioridad de consignas
Módulos de motor asíncrono (AM)3.1 Interfases de consigna de velocidad
12.9410.0004.97

AM
10.00
AM/3-40 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.2 Bornes de entrada
3.2.1 Funciones de bornes cableadas (de asignación fija)
Precaución
Si se suprimen los impulsos de alimentación del motor ya no existe informa-ción sobre la velocidad del mismo. Con ello, la velocidad real calculada sepone a 0. Por ello, en caso de supresión de los impulsos dejan de tenercarácter representativo todas las señales de velocidad real, señalizaciones devalor real de velocidad y señalizaciones de relé que vigilan la velocidad (|nreal|< nmín, aceleración terminada, nreal < nx, |nreal| = ncons). Los impulsos al motorpueden suprimirse o bloquearse como consecuencia de la anulación de seña-les de desbloqueo o de la aprición de señalizaciones de fallo.
Precaución
Si un accionamiento se detiene utilizando la función de parada del generadorde rampas (B.81 abierto) y se mantiene a velocidad 0 durante un tiempo pro-longado, estando desbloqueado el convertidor, es necesario atender a procu-rar una refrigeración suficiente del motor ya que se establece una intensidaddel orden de magnitud de la intensidad nominal (porcentaje en P–057).
Tener particular cuidado con motores que se refrigeren con ventilador solidarioal eje.
Tabla 3-5 Funciones de bornes cableadas (de asignación fija)
Funciones de bor-nes
Descripción Número delborne
Desbloqueo de im-pulsos específicode eje
El desbloqueo del ondulador/convertidor (alimentación motor) se obtiene apli-cando señal de desbloqueo en el B.663 (desbloqueo de impulsos específico deeje) y el B.65 (desbloqueo de regulador).Si se suprime el desbloqueo del B.663 (desbloqueo de impulsos específico deeje) mientras gira el motor, el ondulador se bloquea tras 20 ms y el motor se parade forma natural por rozamiento.
663
Desbloqueo de re-gulador
La apertura del B.65 (desbloqueo de regulador) durante el giro del motor provocala deceleración siguiendo la rampa correspondiente.Si la velocidad baja del umbral nmín (P–022), se bloquea el ondulador y el motorse para sin giro en sentido opuesto.
65
Paro rápido del ge-nerador de rampas
Si se aplica tensión de desbloqueo en el B.81 (paro rápido del generador derampas), se habilita la consigna de velocidad. La apertura del borne provoca laanulación digital de la consigna de velocidad.Si estando girando el motor se retira la señal en el B.81, el motor frena sin rampahasta llegar a los límites efectivos (límite de intensidad P–057...P–059, límite depar P–039, P–041, límite de potencia P–060).Tras alcanzarse la velocidad 0 sigue circulando la intensidad ajustada en P–057.Si está puesto a 1 el bit 2 en P–053, cuando se baja de la velocidad ajustada enP–022 se bloquean los impulsos con lo que ya no se alimenta el motor.
81
Indicación
A la hora de arrancar un motor, las señales de desbloqueo deberán activarsesucesivamente en su orden de prioridades (v. tabla 3-5).
Módulos de motor asíncrono (AM)3.2 Bornes de entrada
07.94

AM
10.00
AM/3-41 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.2.2 Funciones de bornes programables
Precaución
La programación de los parámetros P–081 a P–089 correspondientes a lasfunciones de borne solo puede realizarse una vez bloqueados los impulsos(B.63 ó B.663 abierto).
Asignación de funciones de bornes
Funciones de bornes
Tabla 3-6 Asignación de funciones de bornes
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
P–081a
P–089
online 4 1...24 Dec Asignación de funiones de bornes E1 a E9La asignación de las funciones 1 a 24 de los bornesE1 a E9 se efectúa inscribiendo el número de fun-ción. La tabla siguiente muestra los ajustes defábrica.
Sinopsis
Asignación de fun-ciones de bornes
Módulos de motor asíncrono (AM)3.2 Bornes de entrada
12.94

AM
10.00
AM/3-42 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-7 Funciones de bornes
Funciónde borne
Descripción Nºfun-ción
Borne entr.De fábrica
2º límite de par Si se selecciona esta función se activa el segundo límite de par en P–041,siempre que se haya superado la velocidad de conmutación en P–050.
1 (P–081) E1
Oscilación Se activa la consigna de velocidad procedente del generador de oscilacióndefinida en P–154 a P–157.
2
Borrar memoriade fallos (R)(acuse de fal-los)
Si se activa esta función se acusa una señalización de fallo presente siempreque esté bloqueado el regulador (B.65 ó B.663 abierto).
3 (P–083) E3
Tiempo acelera-cion=0
Si se selecciona esta función se anula el generador de rampas interno 7 (P–082) E2
Escalón 1 2 3 4 5 6 7 8 Estos bornes permiten especificar un total de ochojuegos de parámetros codificados de forma binariaBit 0 0 1 0 1 0 1 0 1 juegos de parámetros codificados de forma binariapara normalización de consigna, vigilancia de velo- 9 (P–087) E7
Bit 1 0 0 1 1 0 0 1 1ara normalización de consigna, vigilancia de velo
cidad, ajuste de reguladores, limitación de par y vigi-lancia de par
10 (P–088) E8
Bit 2 0 0 0 0 1 1 1 1lancia de par.
11 (P–089) E9
Giro horario/an-tihorario
Si se activa esta función sólo se permiten consigna positivas; valores negati-vos provocan n=0. Si se aplica señal en el borne correspondiente, sólo haygiro antihorario; de lo contrario sólo giro horario.
12
Generador ram-pas 2
Si se activa esta función entra en acción en segundo juego de parámetros,P–042 y P–043, del generador de rampas interno.
13
Subir consigna Función de potenciómetro motorizado P–113=6Si se aplica señal en uno de estos bornes se incrementa o reduce, resp., la
14Si se a lica señal en uno de estos bornes se incrementa o reduce, res ., laconsigna de velocidad digital P–114.8 de la función de potenciómetro motori-zado siguiendo los tiempos de aceleración o deceleración del generador derampas 2 (excepción: TH 0) De aplicarse simultáneamente señal en ambas
Bajar consigna
g grampas 2 (excepción: TH=0). De aplicarse simultáneamente señal en ambas,se modifica la consigna en dirección al valor 0. 15
Desbloqueo deconsigna
Si se activa esta función deberá estar también activado el borne correspon-diente para poder mover el accionamiento. Si se anula la señal en el borne, elaccionamiento frena siguiendo la rampa correspondiente y se detiene aunquesigue energizado.
16
Selección con-signa fija
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Estos bornes permi-ten seleccionar un to-tal de 15 consignas fi-
Bit 0 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1tal de 15 consignas fijas codificadas en bi-nario P–114.1 aP 114 7 P 119 1
17 P–084 (E4)
Bit 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 P–114.7 y P–119.1a P–119.8. Si quedanabiertos todos los
18 P–085 (E5)
Bit 2 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1abiertos todos losbornes, es válida laconsigna definida en
19 P–086 (E6)
Bit 3 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1consigna definida enP–113. 24
Selección motor 1 2 3 4
Estos bornes permiten seleccionar un total de 4 juegos de datosBit 0 0 1 0 1
Estos bornes permiten seleccionar un total de 4 juegos de datosde parámetros, motor 1 a motor 4, codificados en binario. 20
Bit 1 0 0 1 1de arámetros, motor 1 a motor 4, codificados en binario.
21
Funciones de bornes
Módulos de motor asíncrono (AM)3.2 Bornes de entrada
10.0004.97

AM
10.00
AM/3-43 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3 Bornes de salida
Precaución
Si se suprimen los impulsos de activación para el motor ya no existe informa-ción sobre la velocidad del mismo. Con ello, la velocidad real calculada sepone a 0. Por ello, en caso de supresión de los impulsos dejan de tenercarácter representativo todas las señales de velocidad real, señalizaciones devalor real de velocidad y señalizaciones de relé que vigilan la velocidad (|nreal|< nmín, aceleración terminada, nreal < nx, |nreal| = ncons). Los impulsos al motorpueden suprimirse o bloquearse como consecuencia de la anulación de seña-les de desbloqueo o de la aprición de señalizaciones de fallo.
Atención
En el caso de desconexión de la alimentación de la electrónica o en caso dedefecto en la misma se desexcitan todos los relés.
3.3.1 Funciones de relés cableadas (de asignación fija)
Tabla 3-8 Funciones de relés cableadas
Función deborne
DescripciónNúmero del
borne
La función del relé es conmutable con P–053:
Señal. listo/h f ll
Bit Valor672
no hay falloespecíficade eje 0
0000H
0001H
El relé se excita en ausencia de fallo yen presencia de desbloqueo de impul-sos y de regulador.El relé se excita en ausencia de fallo.
672673674
Señal. re-envío blq.antiarranque
El relé (NC) se excita cuando la tensión de desbloqueose aplica en el B.663 para el desbloqueo de impulsosespecífico de eje.
AS1AS2
Módulos de motor asíncrono (AM)3.3 Bornes de salida

AM
10.00
AM/3-44 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3.2 Funciones de relés programables
Precaución
La programación de los relés (P–241 a 247) sólo debe ser realizada una vezsuprimidos (bloqueados) los impulsos (B.63 ó B.663 abierto).
Asignación de señalizaciones
Funciones de relé
Señalizaciones parametrizables
Palabra de mando de señalizaciones
Indicación
Las señalizaciones por relé se actualizan cada 20ms para el caso de ciclo delregulador de velocidad estándar.Para el ciclo rápido de dicho regulador, cada 10ms (v. P–090, bit 3, FW 3.00).
Tabla 3-9 Asignación de señalizaciones
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
P–241a
P–246
online 4 1...20 Dec Señalizaciones programables 1 a 6La asignación de las funciones 1 a 24 de las salidasde relé A11 a A61 se efectúa registrando el númerode función. En la tabla siguiente figuran también losajustes de fábrica.
Sinopsis
Asignación deseñalizaciones
Módulos de motor asíncrono (AM)3.3 Bornes de salida
10.0004.97

AM
10.00
AM/3-45 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-10 Funciones de relés
Función del relé Descripción Nºfunción
Salida reléDe fábrica
|nreal|< nmín El relé se excita cuando la velocidad calculada baja por debajo del valor actualajustado en P–021.1 a P–021.8.
1 A31 (P–243)
Aceleración ter-minada
El relé se excita cuando tras un salto de consigna, la velocidad real calculadaentra en la banda actual de tolerancia alrededor de la nueva consigna y per-manece en ella como mínimo 200 ms.Si se abandona la banda de tolerancia antes de transcurrir 200 ms se desac-tiva la señalización “Aceleración terminada”.El ancho de la banda de tolerancia se ajusta en P–027.1 a P–027.8.Esta señalización se enclava en la posición activada hasta que haya un nuevocambio de consigna de velocidad.Si tras 200 ms se abandona la banda de tolerancia, permanece activa la señal-ización a no ser que se haya modificado entretanto la consigna.Fluctuaciones de velocidad causadas por cambios de carga no provocan ladesexcitación del relé.
2 A61 (P–246)
|Md|< Mdx El relé se excita cuando el par baja del límite actual.Este límite se ajusta con P–047.1 a P–047.8.Si en caso de modificación de consigna de velocidad se desexcita el relénreal=ncons, el relé |Md|< Mdx sólo puede desexcitarse 800 ms después de quehaya vuelto a excitarse el relé nreal =ncons.
3 A21 (P–242)
|nreal|< nx El relé se excita cuando la velocidad baja del umbral nx.nx se ajusta vía P–023.1 a P–023.8.
4 A41 (P–244)
Alarma I2t El relé se desexcita cuando se detecta sobrecarga en el modelo térmico actualdel motor. El ajuste de la constante de tiempo térmica se hace, para cada mo-tor por separado, en P–175.1 a P–175.4.Se deja a criterio de usuario programar una eventual reacción a esta alarma.No se considera el funcionamiento del ventilador y la temperatura del aire deentrada. Por ello es preferible evaluar la señal proveniente de una sonda detemperatura.
5 A51 (P–245)
Alarma sobre-temperatura con-
vertidor
El relé se desexcita cuando actúa la vigilancia de temperatura en el disipadorprincipal. Si se mantiene la sobretemperatura, el convertidor se desconecta,señalizando F-15, tras aprox. 20 s.
6 –
Función de relévariable 1 V. descripción “Función de relé variable”.
7 –
Función de relévariable 2
Ajuste vía P–185 a P–189 y vía P–190 a P–194. 8 –
reservado 9 –
reservado 10 –
Motor 1 activo Uno de estos relés se excita cuando está activo el juego de parámetros det 1 4 di t E t f ió d lé it d l t t
11 –
Motor 2 activo
j gmotor 1 a 4 correspondiente. Esta función de relé permite mandar el contactorauxiliar para la conmutación del motor. 12 –
Motor 3 activoauxiliar ara la conmutación del motor.Se recomienda enclavar mutuamente los contactores y enclavar la señal dedesbloqueo de impulsos
13 –
Motor 4 activo
ydesbloqueo de impulsos
14 –
Prealarma sobre-temperatura en
motor
El relé se desexcita en caso de sobretemperatura en motor. Si permanece lacondición anómala, el convertidor se desconecta tras el tiempo ajustado enP–065, señalizando aviso F–14.(a partir de FW 3.00)
16 –
nreal =ncons El relé se excita cuando la velocidad real calculada entra en la banda de toler-ancia situada alrededor del valor de consigna y permanece en ella comomínimo 200 ms.La banda de tolerancia se ajusta en P–027.1 a P027.8.Si se abandona la banda de tolerancia, el relé “nreal = ncons” se desexcita in-mediatamente.Fluctuaciones de velocidad causadas por cambios de carga provocan la de-sexcitación del relé.
20 A11 (P–241)
Funciones de relés
Módulos de motor asíncrono (AM)3.3 Bornes de salida
10.0004.97

AM
10.00
AM/3-46 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-11 Señalizaciones parametrizables
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–021.G online 4 2...16000 r/min nmín para señalización “nreal < nmín”Umbral para señalización por relé programable 1“|nreal| < nmín”
P–023.G online 4 0...32000 r/min nx para señalización “nreal < nx”Umbral para señalización por relé programable 4“|nreal| < nx”
P–027.G online 4 0...29000 r/min Banda de tolerancia para señalización “nreal = ncons”Valor de tolerancia para señalización por relé progra-mable 1 “Aceleración terminada” y para señalizaciónde relé 20 “ncons = nreal”
P–047.G online 4 0...100 % Mdx para señalización “Md < Mdx”Umbral para señalización por relé programable 3“Md < Mdx”Este ajuste se expresa en porcentaje del límite depar actual.
Tabla 3-12 Palabra de mando Señalizaciones
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–247 online 4 0...FFFF Hex Palabra de mando Señalizaciones
Poniendo a 1 el bit asociado es posible invertir inde-pendientemente cada señalización por relé.
Bit Valor
0 0001H Inversión de la función del relé ensalida B. A11
1 0002H Inversión de la función del relé ensalida B. A21
2 0004H Inversión de la función del relé ensalida B. A31
3 0008H Inversión de la función del relé ensalida B. A41
4 0010H Inversión de la función del relé ensalida B. A51
5 0020H Inversión de la función del relé ensalida B. A61
Señalizaciones pa-rametrizables
Palabra de mandoSeñalizaciones
Módulos de motor asíncrono (AM)3.3 Bornes de salida
07.94

AM
10.00
AM/3-47 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3.3 Función de relé variable
Tabla 3-13 Función de relé variable
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–185 aP–189
– – – Función de relé variable 1
P–185 online 4 0...FFFF Hex Dirección para vigilancia 1
P–186 online 4 0...FFFF Hex Umbral para vigilancia 1
P–187 online 4 0,00...10,00 s Retardo a la excitación vigilancia 1
P–188 online 4 0,00...10,00 s Retardo a la desexcitación vigilancia 1
P–189 online 4 0...7FFF Hex Histéresis vigilancia 1histéresis para umbral P–186
P–190a
P–194
– – – Función de relé variable 2
P–190 online 4 0...FFFF Hex Dirección para vigilancia 2
P–191 online 4 0...FFFF Hex Umbral para vigilancia 2
P–192 online 4 0,00...10,00 s Retardo a la excitación vigilancia 2
P–193 online 4 0,00...10,00 s Retardo a la desexcitación vigilancia 2
P–194 online 4 0...7FFF Hex Histéresis vigilancia 2histéresis para umbral P–191
P–247 online 4 0...FFFF Hex Palabra de mando Señalizaciones
Bit Valor
8
0000H Función de relé variable 1 conconsulta de signo
80100H Función de relé variable 1 con
consulta de valor absoluto
9
0000H Función de relé variable 2 conconsulta de signo
90200H Función de relé variable 2 con
consulta de valor absoluto
0000H Función de relé variable 1 conP–186 como umbral
121000H Función de relé variable 1 para
test de bits.El umbral (P–186) se combinacon una función Y con la variableen RAM a vigilar (P–185).
13
0000H Función de relé variable 2 conP–191 como umbral
132000H Función de relé variable 2 para
test de bits
Indicación
En el anexo (apt. 6.5) figura una lista con las principales magnitudes de me-dida (variables en RAM) con sus direcciones.
Módulos de motor asíncrono (AM)3.3 Bornes de salida
12.94

AM
10.00
AM/3-48 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3.3.4 Salidas analógicas
Indicación
Las salidas analógicas no son posibles en el módulo con ref.6SN1122–0BA11–0AA0.
Función
Datos técnicos
Parametrización de CDA 1, CDA 2 (CDA = DAU)
Conexión para indicaciones analógicas
Salida analógica de variables en RAM vía dos convertidores digital-analógico(CDA/DAU) de 8 bits, para fines de medida.
Indicación
En el anexo (apt. 6.5) figura una lista con las principales magnitudes de me-dida (variables en RAM9 con sus direcciones.
2 canales de salida en bornes A91 (CDA 1) y A92 (CDA 2)
Margen de tensión ± 10 V
Normalización fina y grosera, compensación de offset
Polaridad de la tensión de salida ajustable por normalización fina(± 1000 %)
Sinopsis
Función
Datos técnicos
Módulos de motor asíncrono (AM)3.3 Bornes de salida
04.97

AM
10.00
AM/3-49 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 3-14 Parametrización CDA 1, CDA 2
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–066 online 4 0...FFFF Hex Dirección CDA 1Dirección de la variable en RAM a sacar vía CDA 1.Ajuste prefijado: 11B6H valor absoluto de la veloci-dad real calculada
P–067 online 4 0...F Hex Factor de decalaje CDA 1Normalización grosera del valor seleccionado pordesplazamiento a la izquierda del número binario.Desplazamiento a la izda. en 1 = multiplicación por 2Ganancia máx.: 32768
P–012 online 4 –1000,0...1000,0%
Normalización CDA 1Normalización fina del valor seleccionado
P–078 online 4 –127...127 Dec Offset CDA 1Compensación de un eventual offset en CDA 1
P–068 online 4 0...FFFF Hex Dirección CDA 2Ajuste prefijado: 11B8H tasa de utilización
P–069 online 4 0...F Hex Factor de decalaje CDA 2
P–013 online 4 –1000,0...1000,0%
Normalización CDA 2
P–079 online 4 –127...127 Dec Offset CDA 2
2000H
–10,0
0
+10,0
0000H 4000H 6000H 8000H A000H C000H E000H FFFFH
Tensión de salida [V]
1er rebase 2º rebase 3er rebase 4º rebase
Factor decalaje = 0Factor decalaje = 2
Offset = 0 VNormalización fina = 100 %
Valor hexadecimal
ParametrizaciónCDA 1, CDA 2
Módulos de motor asíncrono (AM)3.3 Bornes de salida
07.94

AM
10.00
AM/3-50 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Aplicación: La asignación de los CDA que se muestra a continuación está pre-vista para conectar instrumentos indicadores unipolares; por ello, el margen detrabajo se ha limitado a 0...+10 V sin rebase o desbordamiento.
Tabla 3-15 Conexión para indicaciones analógicas
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–012 online 4 –1000,0...1000,0 Normalización CDA 1P–066 = 11B6H Indicación |nreal|Para P–012 = 100 % y P–067 = 0H rige:Motor parado = 0 VVelocidad máx. (máximo de P–029, P–174) = +10 V1 V corresponde a 10 %
P–013 online 4 –1000,0...1000,0 Normalización CDA 2 P–068 = 11B8H Tasa de utilizaciónIndicación de la tasa de utilización en los márgenesPar constante: Md/MdmáxPotencia constante: P/Pmax(se consideran los límites actuales de par P–039 yP–041 y de intensidad y de potencia P–059 y P–060)Para P–013 = 100 % y P–069 = 0H rige:Marcha en vacío = 0 VPar o potencia máx = + 10 V1 V corresponde a 10 %
2000H
–10,0
0
+10,0
Tensión de salida [V]
0000H 4000H 6000H 8000H A000H C000H E000H FFFFH
sin rebase
Factor decalaje = 0Factor decalaje = 2
Offset = 0 VNormalización fina = 100 %
Valor hexadecimal
Conexión para in-dicacionesanalógicas
Módulos de motor asíncrono (AM)3.3 Bornes de salida
07.94

AM
10.00
AM/4-51 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Optimización de reguladores
Para el ajuste de parámetros importantes del motor es posible seleccionar fun-ciones de ejecución automática. Para ello es necesario desbloquear el acciona-miento.
Precaución
Durante los ciclos de optimización automáticos el motor está sometido a ten-sión, alcanzándose velocidades que pueden llegar hasta la velocidad máxima.Los ciclos de optimización correspondientes están identificados por el símbolo .
Indicación
Si se utiliza un módulo UE, para reducir la potencia de devolución a la red esnecesario incrementar el tiempo de deceleración P-017 ó P-043 hasta un valortal que permita frenar de la velocidad máxima del motor a 0 sin que se señalicefallo (sobretensión en circuito intermedio).
Tabla 4-1 Optimización de reguladores
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
Optimización de datos de regulador del motor actual con accionamiento desbloqueado
Optimización regulador intensidad, v. apt. 4.2
P–204 online 10 0...8 Dec Ajuste 1 Selección: optimización regulador intensidad
P–205 online 0...1 Dec Ajuste 1 Lanza optimización
Corrección ofset parte de potencia
P–204 online 10 0...8 Dec Ajuste 2 Selección: corrección offset de p. potencia
P–205 online 0...1 Dec Ajuste 1 Lanzar corrección
Optimización regulador velocidad, v. apts. 4.1 y 4.7
P–031 online 4 0,0...255,9 Ganancia P regulador velocidad
P–032 online 4 10,0...6000,0 ms Tiempo acción integral regulador velocidad
1) Ya no es necesario a partir de la FW 3.0
Módulos de motor asíncrono (AM)4 Optimización de reguladores
12.9404.97
4

AM
10.00
AM/4-52 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-1 Optimización de reguladores
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
Optimización regulador de campo, v. apt. 4.3
P–034 online 4 0,0...600,0 A/V s Ganancia P regulador de campo
P–035 online 4 5,0...600,0 ms Tiempo acción integral regulador de campo
Corrección intensidad en vacío
P–204 online 10 0...8 Dec Ajuste 3 Selección: corrección intensidad en vacío
P–205 online 0...1 Dec Ajuste 1 Lanzar corrección
Corrección reactancia campo principal
P–204 online 10 0...8 Dec Ajuste 4 Selección: corr. reactancia campo principal
P–205 omline 0...1 Dec Ajuste 1 Lanzar corrección
Corrección velocidad debilitamiento campo(a partir de FW 2.00)
P–204 online 10 0...8 Dec Ajuste 8 Selección: corr. vel. debilitamiento campo
P–205 omline 0...1 Dec Ajuste 1 Lanzar corrección
Corrección momento de inercia total
P–204 online 10 0...8 Dec Ajuste 5 Selección: corrección momento inercia total
P–205 online 0...1 Dec Ajuste 1 Lanzar corrección
Corrección resistencia rotor(no necesaria en motores conrotor de desplazamiento de corriente)
P–204 online 10 0...8 Dec Ajuste 6 Selección: corrección resistencia motor
P–205 online 0...1 Dec Ajuste 1 Lanzar corrección
Cálculo ajuste regulador velocidad (a partir de FW 2.00)no es necesaria si se ha realizado la optimización delregulador de velocidad (v. arriba)
P–204 online 10 0...8 Dec Ajuste 7 Selección: cálculo ajuste regulador velocidad
P–205 online 0...1 Dec Ajuste 1 Lanzar cálculo
P–052 online 4 0...1 Hex Carga de parámetros en FEPROM
Módulos de motor asíncrono (AM)4 Optimización de reguladores
12.94

AM
10.00
AM/4-53 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
Si se interrumpe la corrección de la intensidad en vacío con la señalización defallo F-60, entonces es necesario anular la limitación de velocidad eventual-mente activada, ajustándola a un valor superior de la velocidad en vacío.
Si se ha interrumpido la corrección con señalización F-60 debido a limitaciónde tensión, esta operación puede repetirse con un valor menor en P-166 oelevando la tensión en el circuito intermedio a 625 V (v. módulo NE).
Indicación
Para la corrección del momento de inercia total es necesario ajustar a un valorlo menor posible el tiempo de aceleración P-016 ó P-042 (preferentemente acero).
Si el regulador de velocidad exige un tiempo de acción integral P-032 >250 ms, la corrección del momento de inercia total deberá realizarse manual-mente conforme al apt. 4.7.
Si se usa un módulo UE, para reducir la potencia de devolución a la red esnecesario incrementar el tiempo de deceleración P-017 ó P-043.
Indicación
Si el eje del motor se gira durante la operación de optimización del reguladorde intensidad, entonces es necesario repetir la optimización prescribiendo unaconsigna de velocidad igual a cero (p. ej. a través del borne 81 HSS).
Módulos de motor asíncrono (AM)4 Optimización de reguladores
12.9404.97

AM
10.00
AM/4-54 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.1 Regulador de velocidad
Generador de rampas
Ganancia, tiempo de acción integral
Adaptación del regulador de velocidad
Ciclo (cadencia) del regulador de velocidad
Momento de inercia total
Tabla 4-2 Generador de rampas
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–016.M online 4 0,00...320,00 s Tiempo de aceleración generador de rampas 1(de n = 0 a nmáx P–174)
P–017.M online 4 0,00...320,00 s Tiempo desaceleración generador de rampas 1(de nmáx → P–174 a n = 0)
P–042.M online 4 0,00...320,00 s Tiempo de aceleración generador de rampas 2(de n = 0 a nmáx → P–174)
P–043.M online 4 0,00...320,00 s Tiempo desaceleración generador de rampas 2(de nmáx → P–174 a n = 0)
P–018.M online 4 4,00...100,00 ms Redondeo inicial de rampaAlisa la consigna de par
P–053 online 4 0...FFFF Hex Palabra de mando
Bit Valor
0000H Corrección gen. rampas activa
3 0008H Corrección gen. rampas no activa
Tiempo [s]Tiempo [s]
Velocidad VelocidadSalida gen. de rampas
Consigna develocidad
Salida gen. de rampas
Velocidad real Velocidad real
sin corrección del gen. de rampas con corrección del gen. de rampas
Consignade veloc.
Sinopsis
Generador de ram-pas
Módulos de motor asíncrono (AM)4.1 Regulador de velocidad
12.94

AM
10.00
AM/4-55 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-3 Ganancia, tiempo de acción integral
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripcióntiva
g j p
P–031.M online 4 0,0...255,9 Ganancia P del regulador de velocidad
P–032.M online 4 10...6000 ms Tiempo acción integral del reg. velocidad
Al calcular los datos de reguladores, P–153 = –1, se determinan entre otros losparámetros del regulador de velocidad.
En algunos casos es posible mejorar aún más la respuesta de regulación(v. apt. 4.7)
Si en el margen superior de velocidades se desea una ganancia P del regula-dor de velocidad diferente, entonces puede activarse la función de adaptacióndel mismo.
Tabla 4-4 Adaptación del regulador de velocidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–195.M online 4 0...32000 r/min Velocidad de adaptación inferior
P–196.M online 4 0...32000 r/min Velocidad de adaptación superior
P–197.M online 4 0,0...255,9 Dec Ganancia P, velocidad de adaptación inferior
P–198.M online 4 0,0...255,9 Dec Ganancia P, velocidad de adaptación superior
P–199.M online 4 1...150 % Ganancia P, factor de reducción(Multiplicación de la característica de ganancia P entodo el margen de velocidad)
P–203.M online 4 0...1 Hex Selección adaptación regulador velocidad0: sin adaptación P–031 efectivo1: adaptación reg. de vel. activa P–031 no
efectivo
Velocidad [r/min]
P–197 P–199
P–198 P–199
Ganancia P [Dec]
P–195 P–1960
Ganancia, tiempode acción integral
Adaptación del re-gulador de veloci-dad
Módulos de motor asíncrono (AM)4.1 Regulador de velocidad
12.9412.94

AM
10.00
AM/4-56 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-5 Ciclo del regulador de velocidad
Atributos de parámetrosMargen de aj
Número Modif. ac-tiva
P–051Margen de aju-
ste Descripcióntiva
ste p
P–090 4 0...FFFFHex Palabra de mando
Bit Palabra
3 0000H
0008H
Ciclo regulador de velocidadestándarCiclo regulador de velocidadrápidoCualquier cambio en el bit 3sólo actúa tras memorizar enFEPROM y Red ON/OFF.
Tabla 4-6 Momento de inercia total
Atributos de parámetrosM d jNúmero Modif. ac-
ti aP–051 Margen de aju-
steDescripción
tiva step
P–159.M online 4 0,0...6535,5 gm2 Momento de inercia motor y cargaSuma del momento de inercia del motor + momento deinercia de la carga referida al eje del motor
P–219.M online 4 0...15 kgm2 Momento de inercia suplementarioEl valor parametrizado se suma internamente aP–159.M. Sólo se precisa modificación en P–219.M encaso de sobrepasarse el margen de ajuste deP–159.M(a partir de FW 2.00)
Ciclo (cadencia)del regulador develocidad
Momento de iner-cia total
Módulos de motor asíncrono (AM)4.1 Regulador de velocidad
04.97

AM
10.00
AM/4-57 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.2 Regulador de intensidad
Optimización regulador de intensidad
Intensidad en vacío motor
Precaución
Si se ajusta a un valor excesivo la ganancia P del regulador de intensidadP–115 ó P–116 puede destruirse el módulo.Si se incrementa la frecuencia de pulsación del convertidor es necesario re-spetar la reducción de potencia especificada en la tabla 4-8.
Tabla 4-7 Optmización regulador de intensidad
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–036.M online 4 0...3 Hex Frecuencia pulsación onduladorpElevando esta frecuencia se mejora la respuesta dinámicadel regulador de intensidad pero se reduce la capacidadde carga en servicio permanente debido a que aumentanlas pérdidas por conmutación en los semiconductoresEl límite de corriente dependiente de la frecuencia de relojse indica en el parámetro P–049 y representa la máximacorriente de convertidor en % con relación a la corrientede par.Si se modifica la frecuencia de pulsación es necesariooptimizar de nuevo el regulador de intensidad.
Frecuencia de pulsación del ondulador
0123
3,2 kHz4,7 kHz6,3 kHz7,8 kHz
67
2,8 kHz3,9 kHz5,0 kHz5,9 kHz
45
(P–037) – – 2,8...7,8 kHz Indica la frecuencia de pulsación del ondulador actual
(P–049) – – 0...399 % Limitación de corriente con derating
Sinopsis
Regulador de in-tensidad
Módulos de motor asíncrono (AM)4.2 Regulador de intensidad
10.00
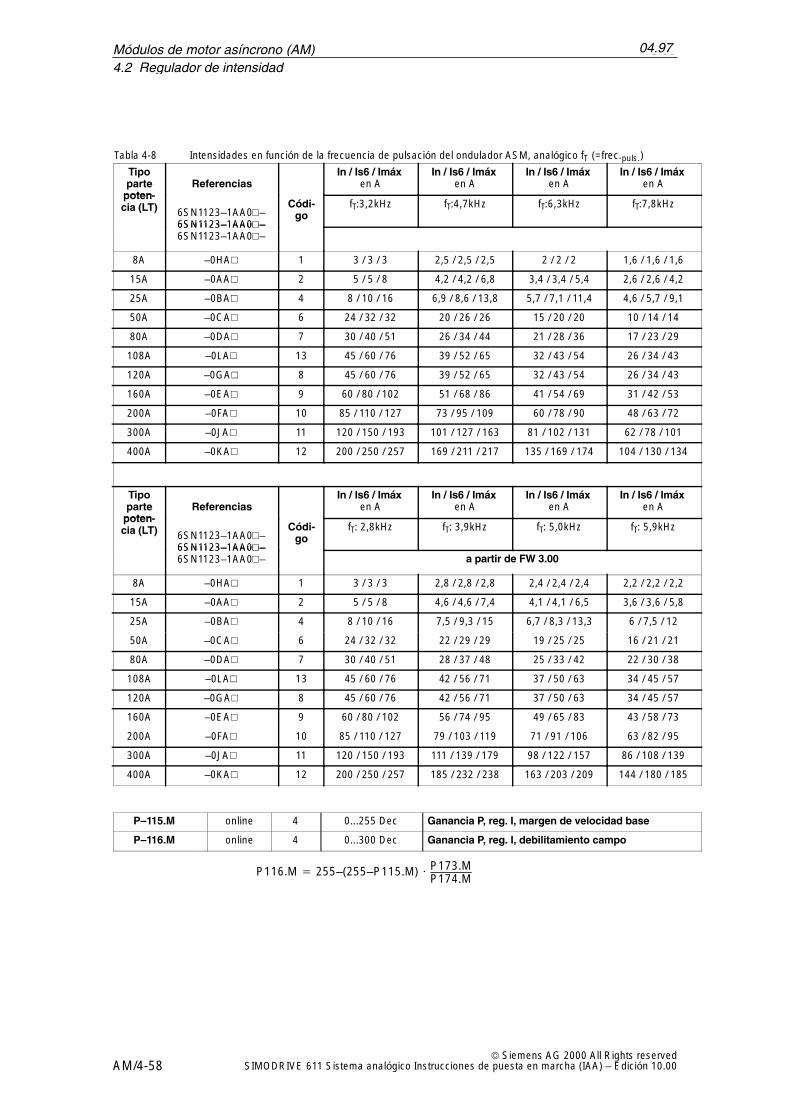
AM
10.00
AM/4-58 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-8 Intensidades en función de la frecuencia de pulsación del ondulador ASM, analógico fT (=frec.puls.)
Tipoparte
poten-Referencias
In / Is6 / Imáx en A
In / Is6 / Imáx en A
In / Is6 / Imáx en A
In / Is6 / Imáx en A
poten-cia (LT) 6SN1123–1AA0–
6SN1123–1AA0–
Códi-go
fT:3,2kHz fT:4,7kHz fT:6,3kHz fT:7,8kHz
6SN1123–1AA0–6SN1123–1AA0–
8A –0HA 1 3 / 3 / 3 2,5 / 2,5 / 2,5 2 / 2 / 2 1,6 / 1,6 / 1,6
15A –0AA 2 5 / 5 / 8 4,2 / 4,2 / 6,8 3,4 / 3,4 / 5,4 2,6 / 2,6 / 4,2
25A –0BA 4 8 / 10 / 16 6,9 / 8,6 / 13,8 5,7 / 7,1 / 11,4 4,6 / 5,7 / 9,1
50A –0CA 6 24 / 32 / 32 20 / 26 / 26 15 / 20 / 20 10 / 14 / 14
80A –0DA 7 30 / 40 / 51 26 / 34 / 44 21 / 28 / 36 17 / 23 / 29
108A –0LA 13 45 / 60 / 76 39 / 52 / 65 32 / 43 / 54 26 / 34 / 43
120A –0GA 8 45 / 60 / 76 39 / 52 / 65 32 / 43 / 54 26 / 34 / 43
160A –0EA 9 60 / 80 / 102 51 / 68 / 86 41 / 54 / 69 31 / 42 / 53
200A –0FA 10 85 / 110 / 127 73 / 95 / 109 60 / 78 / 90 48 / 63 / 72
300A –0JA 11 120 / 150 / 193 101 / 127 / 163 81 / 102 / 131 62 / 78 / 101
400A –0KA 12 200 / 250 / 257 169 / 211 / 217 135 / 169 / 174 104 / 130 / 134
Tipoparte
poten-Referencias
In / Is6 / Imáx en A
In / Is6 / Imáx en A
In / Is6 / Imáx en A
In / Is6 / Imáx en A
poten-cia (LT) 6SN1123–1AA0–
6SN1123–1AA0–
Códi-go
fT: 2,8kHz fT: 3,9kHz fT: 5,0kHz fT: 5,9kHz
6SN1123–1AA0–6SN1123–1AA0– a partir de FW 3.00
8A –0HA 1 3 / 3 / 3 2,8 / 2,8 / 2,8 2,4 / 2,4 / 2,4 2,2 / 2,2 / 2,2
15A –0AA 2 5 / 5 / 8 4,6 / 4,6 / 7,4 4,1 / 4,1 / 6,5 3,6 / 3,6 / 5,8
25A –0BA 4 8 / 10 / 16 7,5 / 9,3 / 15 6,7 / 8,3 / 13,3 6 / 7,5 / 12
50A –0CA 6 24 / 32 / 32 22 / 29 / 29 19 / 25 / 25 16 / 21 / 21
80A –0DA 7 30 / 40 / 51 28 / 37 / 48 25 / 33 / 42 22 / 30 / 38
108A –0LA 13 45 / 60 / 76 42 / 56 / 71 37 / 50 / 63 34 / 45 / 57
120A –0GA 8 45 / 60 / 76 42 / 56 / 71 37 / 50 / 63 34 / 45 / 57
160A –0EA 9 60 / 80 / 102 56 / 74 / 95 49 / 65 / 83 43 / 58 / 73
200A –0FA 10 85 / 110 / 127 79 / 103 / 119 71 / 91 / 106 63 / 82 / 95
300A –0JA 11 120 / 150 / 193 111 / 139 / 179 98 / 122 / 157 86 / 108 / 139
400A –0KA 12 200 / 250 / 257 185 / 232 / 238 163 / 203 / 209 144 / 180 / 185
P–115.M online 4 0...255 Dec Ganancia P, reg. I, margen de velocidad base
P–116.M online 4 0...300 Dec Ganancia P, reg. I, debilitamiento campo
P116.M 255–(255–P115.M) P173.MP174.M
Módulos de motor asíncrono (AM)4.2 Regulador de intensidad
04.97

AM
10.00
AM/4-59 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-9 Intensidad en vacío del motor
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–166.M online 4 0,00...Inom LT Intensidad en vacío del motorMotor funcionando sin carga
Intensidad envacío del motor
Módulos de motor asíncrono (AM)4.2 Regulador de intensidad
07.94

AM
10.00
AM/4-60 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.3 Regulador de campo
Tabla 4-10 Ganancia, tiempo acción integral
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–034.M online 4 0,0...600,0100 A/Vs
Ganancia P regulador de campo
P–035.M online 4 5,0...600,0 ms Tiempo acción integral regulador de campo
Al calcular los datos del regulador P–153 = –1 se determinan, entre otros, losparámetros del regulador de campo.
En algunos casos es posible mejorar aún más la respuesta de regulación(v. apt. 4.7).
Ganancia, tiempoacción integral
Módulos de motor asíncrono (AM) 07.94
4.3 Regulador de campo

AM
10.00
AM/4-61 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.4 Optimización en el margen en lazo abierto
Precaución
Si un accionamiento opera durante un tiempo prolongado en el margen en lazoabierto (mando) es preciso procurar una refrigeración suficiente del motor yaque se establece una intensidad del orden de magnitud de la intensidad nomi-nal (porcentaje en P–057).
Tener particular cuidado con motores que se refrigeren con ventilador solidarioal eje.
Tabla 4-11 Optimización en el margen en lazo abierto
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–057.M online 4 0...150 % Consigna de velocidad para lazo abiertoPorcentaje de la intensidad nominal del motorConsigna de intensidad para mando por I/f
P–058.M online 4 0...399 % Par acelerador en lazo abiertoPorcentaje del par nominal del motor
P–172.M online 4 0...32000 r/min Velocidad de conmutación lazo cerrado/lazo ab-iertoLa conmutación se realiza con una histéresis de200 r/min.
Indicación
Si durante la fase de aceleración la intensidad es limitada por el valor máximodisponible en el convertidor, entonces se reduce la componente formadora depar.
En este caso, si se reduce la intensidad en P–057 se acorta el tiempo de ace-leración.
Módulos de motor asíncrono (AM)07.94
4.4 Optimización en el margen en lazo abierto

AM
10.00
AM/4-62 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.5 Limitaciones
Tabla 4-12 Limitaciones
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–174.M online 4 0...32000 r/min Velocidad máxima del motorVelocidad máxima permitida al motor
P–059.M online 4 0...399 % Limitación de intensidadPorcentaje de la intensidad nominal del motor
P–060.M online 4 0...399 % Limitación de potenciaPorcentaje de la potencia nominal del motor
P–029.G online 4 0...32000 r/min Limitación de velocidadVelocidad más alta deseada en el motor
P–039.G online 4 0...399 % 1er límite de parPorcentaje del par nominal del motor
P–041.G online 4 0...399 % 2º límite de parPorcentaje del par nominal del motorSelección vía bornes programables, función 1.Se conmuta cuando se sobrepasa la velocidad deconmutación actual de Md1 a Md2, P–050.
P–050.G online 4 0...32000 r/min Velocidad de conmutación de Md1 a Md2Condición para la conmutación de límite
Indicación
Si se desea que un accionamiento opere en el margen de sobrecarga, loslímites sólo deberán elevarse una vez realizada la optimización de los regula-dores.
Siempre actúan simultáneamente los diferentes límites.
Si se desea permitir una cierta sobrecarga es generalmente necesario elevarmás de un límite.
Si se desea cortar el tiempo de aceleración es también adecuado modificar elmargen en lazo abierto.
Módulos de motor asíncrono (AM)4.5 Limitaciones
07.94

AM
10.00
AM/4-63 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.6 Velocidades y márgenes de velocidades particulares
Velocidad estacionaria mínima
Banda muerta
Parada sin giro en sentido opuesto
Tabla 4-13 Velocidad estacionaria mínima
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripcióntiva
g j p
P–030.M online 4 0...32000 r/min Velocidad estacionaria mínimaNo hay servicio estacionario en el margen de veloci-dades alrededor de cero.Por este margen se pasa con los tiempos de acele-ración o deceleración actuales cuando la consignade velocidad sobrepasa la velocidad estacionariamínima en el sentido de giro opuesto.Sólo es posible forzar velociad 0 inhibiendo las seña-les de desbloqueo fijamente cableadas o la funciónde borne programable 16 Desbloqueo de consigna.
Consigna efectiva [r/min]
Consigna prescrita [r/min]200
(P–030 < 200 r/min)
(P–030 > 200 r/min)
200
Consigna prescrita [r/min]
Consigna efectiva [r/min]
200
200
Velocidad estacionaria mín.
Velocidad estacionaria máx.
Sinopsis
Velocidad estacio-naria mínima
Módulos de motor asíncrono (AM)4.6 Velocidades y márgenes de velocidad particulares
07.94

AM
10.00
AM/4-64 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-14 Banda muerta
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–054.MP–055.M
onlineonline
44
0...32000 r/min0...32000 r/min
Banda muerta, velocidad inferiorBanda muerta, velocidad superiorNo es posible funcionamiento estacionario en labanda muerta definida.Por esta banda se pasa con el tiempo de aceleracióno deceleración actual cuando la consigna de veloci-dad supera por exceso o defecto, respectivamente,la otra velocidad que define la banda.
P–055 Vel. superior
Consigna efectiva [r/min]
Consigna prescrita [r/min]
P–054 Vel. inferiorBanda muerta
Banda muerta
Tabla 4-15 Parada sin giro en sentido opuesto
Atributos de parámetros
Número Modif. ac-ti a
P–051 Margen de ajuste Descripcióntiva
g j p
P–022.M online 4 2...32000 r/min Umbral de bloqueo de impulsosParada sin giro en sentido opuestoEn caso de bloqueo de reguladores, cuando se bajade este umbral se corta la corriente del motor paraevitar fenómenos transitorios de inversión de sentidoal aproximarse a la velocidad 0.
Banda muerta
Parada sin giro ensentido opuesto
Módulos de motor asíncrono (AM)4.6 Velocidades y márgenes de velocidad particulares
07.94

AM
10.00
AM/4-65 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
4.7 Optimización manual (reoptimización)
Regulador de intensidad
Regulador de velocidad
Regulador de campo
Intensidad en vacío del motor
Reactancia de campo principal
Momento de inercia del motor y carga
Resistencia del rotor
En el caso de que se precise una reoptimización a mano es necesario registrar,con un osciloscopio con memoria, las señales indicadas en los puntos de me-dida correspondientes. Al hacerlo es necesario ajustar los parámetros de formaque resulten las formas de onda exigidas. La operación de registro puede dis-pararse tomando como referencia la primera de las señales indicadas.
Para realizar algunos ajustes es necesario enjuiciar la respuesta transitoria(respuesta a un escalón) que se produce en respuesta a un escalón de con-signa (si es posible, ajustar tiempo aceleración P–016 ó P–042 = 0). Estos es-calones pueden obtenerse con el generador de oscilación (v. apt. 2.2.3). Si seutilizan módulos E/R, la energía de frenado producida se devuelve a la red.Si se utilizan módulos UE, dicha energía se disipa en forma de calor. Para redu-cir la potencia de frenado es posible incrementar el tiempo de deceleraciónP–017 ó P–043.
P–115 Ganancia P, regulador I, margen de velocidad baseP–116 Ganancia P, regulador I, margen debilitamiento campo
Tabla 4-16 Parametrización borne de medición
Nombre de señal P nto de medidaParametrización
Nombre de señal Punto de medidaDirección F. decalaje p. ej.
Intensidad de fase Hembrilla IR – –
Sinopsis
Regulador de in-tensidad
Módulos de motor asíncrono (AM)4.7 Optimización manual
12.94

AM
10.00
AM/4-66 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Ajuste a realizar con el accionamiento desbloqueado y velocidad n = 0.
Partiendo del valor prefijado, ir incrementando el parámetro P–115 mientraspermanezca estable la forma de onda. Si aparecen oscilaciones, reducir elvalor hasta que vuelva a estabilizarse la forma de onda.
t [s]
Intensidad de fase
P–115 insuficiente t [s]
Intensidad de fase
P–115 correcto t [s]
Intensidad de fase
P–115 excesivo
Figura 4-1 Optimización del regulador de intensidad, margen de velocidad base
P–116 = 300
P–116 = 200
Velocidad [r/min]
Ganancia P
P–115 = 75
0
255
P–173 P–174
300
75
200
Valor máximo
Margenvelocidad base
Margendebilitamiento campo
Figura 4-2 Optimización del regulador de intensidad, margen debilitamiento de campo
A partir de la velocidad de transición a debilitamiento de campo, P–173, la ga-nancia del regulador de intensidad se incrementa linealmente. Al alcanzarse lavelocidad máxima P–174, toma el valor de P–116, pero como máximo el valor255.
Si se ajusta en P–116 un valor > 255, la ganancia del regulador de intensidadalcanza su valor máximo ya a velocidades < P–174.
P116.M 255–(255–P115.M) P173.MP174.M
Módulos de motor asíncrono (AM)4.7 Optimización manual
07.94

AM
10.00
AM/4-67 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
En algunos casos, la respuesta puede mejorarse aún más adoptando un valorun poco mayor.
Tabla 4-17 Ganancia P regulador de intensidad, margen de velocidad base
P–115 Ganancia P reg. de intensidad, margen de velocidad base
Incrementar valor si Reducir valor si
Nº Síntoma Nº Síntoma
F–11 es pobre la respuesta dinámica delregulador de intensidad
F–11 es excesiva la ondulación de inten-sidad, ruidos tipo silbidos, zumbi-dos, etc.
Tabla 4-18 Ganancia P regulador de intensidad, debilitamiento campo
P–116 Ganancia P regulador de intensidad, debilitamiento campo
Incrementar valor si Reducir valor si
Nº Síntoma Nº Síntoma
– el giro en vacío es irregular a velo-cidades altas, choques de par
F–11 hay desenganche espontáneo delmotor (pérdida de estabilidad)
Módulos de motor asíncrono (AM)4.7 Optimización manual
07.94
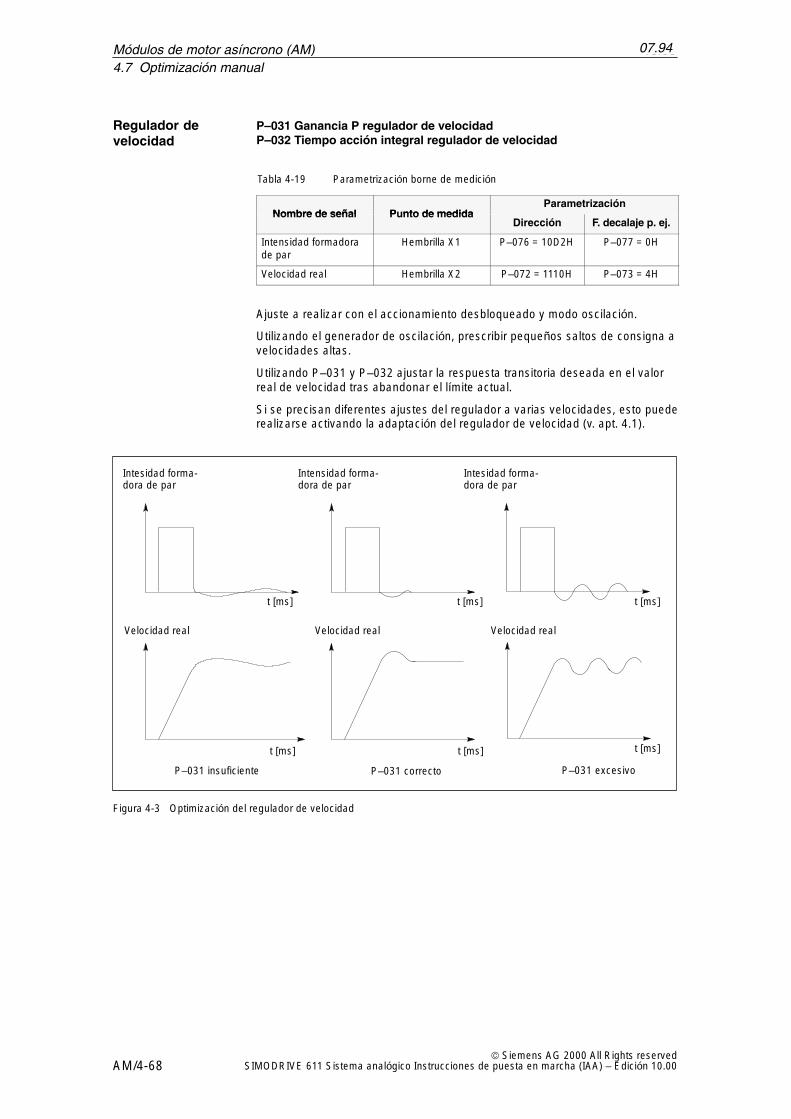
AM
10.00
AM/4-68 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
P–031 Ganancia P regulador de velocidadP–032 Tiempo acción integral regulador de velocidad
Tabla 4-19 Parametrización borne de medición
Nombre de señal P nto de medidaParametrización
Nombre de señal Punto de medidaDirección F. decalaje p. ej.
Intensidad formadorade par
Hembrilla X1 P–076 = 10D2H P–077 = 0H
Velocidad real Hembrilla X2 P–072 = 1110H P–073 = 4H
Ajuste a realizar con el accionamiento desbloqueado y modo oscilación.
Utilizando el generador de oscilación, prescribir pequeños saltos de consigna avelocidades altas.
Utilizando P–031 y P–032 ajustar la respuesta transitoria deseada en el valorreal de velocidad tras abandonar el límite actual.
Si se precisan diferentes ajustes del regulador a varias velocidades, esto puederealizarse activando la adaptación del regulador de velocidad (v. apt. 4.1).
P–031 excesivoP–031 insuficiente P–031 correcto
t [ms]
Velocidad real
Intesidad forma-dora de par
Velocidad real Velocidad real
t [ms] t [ms]
t [ms]t [ms]t [ms]
Intensidad forma-dora de par
Intesidad forma-dora de par
Figura 4-3 Optimización del regulador de velocidad
Regulador de velocidad
Módulos de motor asíncrono (AM)4.7 Optimización manual
07.94
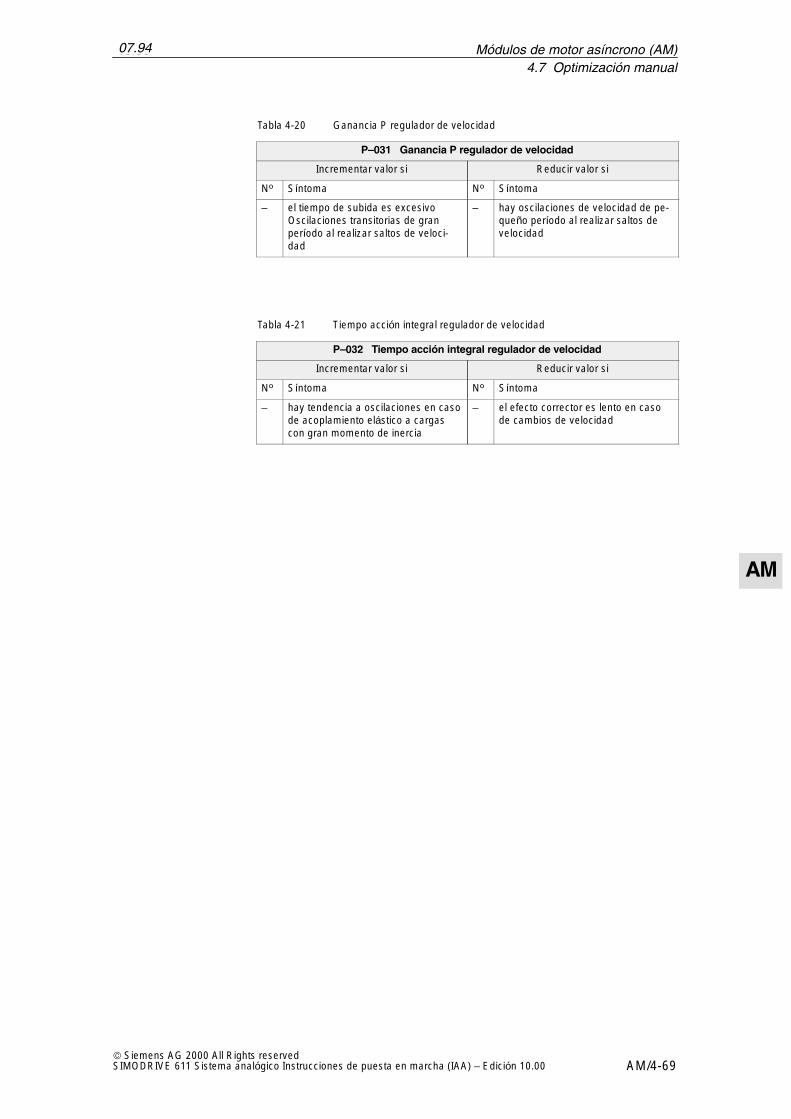
AM
10.00
AM/4-69 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-20 Ganancia P regulador de velocidad
P–031 Ganancia P regulador de velocidad
Incrementar valor si Reducir valor si
Nº Síntoma Nº Síntoma
– el tiempo de subida es excesivoOscilaciones transitorias de granperíodo al realizar saltos de veloci-dad
– hay oscilaciones de velocidad de pe-queño período al realizar saltos develocidad
Tabla 4-21 Tiempo acción integral regulador de velocidad
P–032 Tiempo acción integral regulador de velocidad
Incrementar valor si Reducir valor si
Nº Síntoma Nº Síntoma
– hay tendencia a oscilaciones en casode acoplamiento elástico a cargascon gran momento de inercia
– el efecto corrector es lento en casode cambios de velocidad
Módulos de motor asíncrono (AM)4.7 Optimización manual
07.94

AM
10.00
AM/4-70 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
P–034 Ganancia P regulador de campoP–035 Tiempo acción integral regulador de campo
Tabla 4-22 Parametrización borne de medición
Nombre de señal P nto de medidaParametrización
Nombre de señal Punto de medidaDirección F. decalaje p. ej.
Velocidad real Hembrilla X1 P–076 = 1110H P–077 = 0H
Intensidad formadorade campo
Hembrilla X2 P–072 = 10CAH P–073 = 2H
Realizar el ajuste con el accionamiento desbloqueado y modo oscilación.
Utilizando el generador de oscilación y el generador de rampas frenar partiendode la velocidad máxima siguiendo la rampa hasta llegar a la velocidad de con-mutación P–172.
Partiendo del valor calculado, incrementar el parámetro P–034 hasta que per-manezca estable la intensidad formadora de campo. Si aparecen oscilaciones,reducir el valor, o incrementar P–035, hasta que vuelva a estabilizarse la formade onda.
Control:
Saltos de consigna en debilitamiento de campoEn caso de apreciarse desenganche (F–11), incrementar P–034.
Marcha en vacío a todas las velocidadesEn caso de marcha en vacío irregular con choques de par que lleguen in-cluso a desenganchar el motor (F–11), reducir P–034.
P–034 excesivoP–034 insuficiente P–034 correctot [ms]
Velocidad real
Intensidad forma-dora de campo
Velocidad real Velocidad real
t [ms] t [ms]
t [ms]t [ms]t [ms]
Intensidad forma-dora de campo
Intensidad forma-dora de campo
Figura 4-4 Optimización regulador de campo
Regulador decampo
Módulos de motor asíncrono (AM)4.7 Optimización manual
07.94

AM
10.00
AM/4-71 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-23 Ganancia P regulador de campo
P–034 Ganancia P regulador de campo
Incrementar valor si Reducir valor si
Nº Síntoma Nº Síntoma
F–11 hay desenganche del motor, parti-cularmente en caso de saltos develocidad con debilitamiento decampo
F–11 hay tendencia a la oscilación en laintensidad formadora de campoOndulación en la señal de veloci-dadChoques de parDesenganche del motor en vacío
Indicación
Si se modifica el valor del parámetro P–166 es necesario corregir también lareactancia de campo principal P–171.
Tabla 4-24 Parametrización borne de medición
Nombre de señal P nto de medidaParametrización
Nombre de señal Punto de medidaDirección F. decalaje p. ej.
Intensidad de fase Hembrilla IR – –
Intensidad motor (P–007) Display – –
Tensión real (P–010) Display – –
Tabla 4-25 Ajustes
Ajuste con accionamiento desbloqueado y carga desacoplada
Parámetro Forma de proceder
P–172 Velocidad conmutación lazo cerrado/abiertoAjustar P–172 > P–164 ⋅ 60/p s/min Anotar valor primitivo
P–057 Consigna de intensidad para lazo abiertoAjustar P–057 = 50 % Anotar valor primitivo
Consignavelocidad
Ajustarla de forma que
(P–005) =US
(P–162/P–164) + 2π √3 ⋅ P–158 ⋅ P–161
con tensión de salida US en el módulo AMUS 400 V para UCI = 600 VUS 420 V para UCI = 625 VUS 0,8 ⋅ Ured para UCI no regulado
P–057 Consigna de intensidad en lazo abiertoAjustarla de forma que (P–010) = US
P–166 Intensidad en vacío del motorAjustar P–166 = P–161 ⋅ P–057/100 %
P–172 Velocidad de conmutación lazo cerrado/abiertoRegistrar el valor primitivo
P–057 Consigna de intensidad para margen en lazo cerradoRegistrar el valor primitivo
P–166Intensidad envacío del motor
Módulos de motor asíncrono (AM)4.7 Optimización manual
07.94

AM
10.00
AM/4-72 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
Si se modifica el valor del parámetro P–171 es necesario corregir de nuevo laintensidad en vacío del motor P–166.
Tabla 4-26 Parametrización borne de medición
Nombre de señal P nto de medidaParametrización
Nombre de señal Punto de medidaDirección F. decalaje p. ej.
Acción I delregulador de campo
Hembrilla X1 P–076 = 116A P–077 = 2
Realizar el ajuste con el accionamiento desbloqueado y a la velocidad de trans-ición a debilitamiento de campo, P–173.
Usando el parámetro P–171, ajustar a cero la acción I del regulador de campo.
P–171 excesivoP–171 insuficiente P–171 correcto
0t [ms]
0 0t [ms] t [ms]
Acción I delregulador campo
Acción I delregulador campo
Acción I delregulador campo
Figura 4-5 Optimización reactancia de campo principal
P–171Reactancia decampo principal
Módulos de motor asíncrono (AM)4.7 Optimización manual
07.94

AM
10.00
AM/4-73 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 4-27 Parametrización borne de medición
Nombre de señal P nto de medidaParametrización
Nombre de señal Punto de medidaDirección F. decalaje p. ej.
Velocidad real Hembrilla X1 P–076 = 1110H P–077 = 0H
Acción I delregulador velocidad
Hembrilla X2 P–072 = 117CH P–073 = 2H
Realizar el ajuste con carga desacoplada, estando desbloqueado el acciona-miento, y en modo con oscilación.
Utilizando el generador de oscilación, prescribir saltos de consigna de n = 2 P–172 hasta n = nmáx.
Con el parámetro P–159 ó P–219, ajustar la acción I del regulador de velocidadde forma de que permanezca aproximadamente a cero durante la fase de acel-eración.
P–159 + P–219 excesivoP–159 + P–219 insuficiente P–159 + P–219 correcto
Par de fricción
t [ms]
Velocidad real
Acción I delregulador velocidad
Velocidad real Velocidad real
Acción I delregulador velocidad
Acción I delregulador velocidad
t [ms] t [ms]
t [ms]t [ms]t [ms]
0 0 0
Figura 4-6 Optimización momento de incercia
P–159Momento de inercia de motory carga
P–219Momento de iner-cia suplementario
Módulos de motor asíncrono (AM)4.7 Optimización manual
12.94

AM
10.00
AM/4-74 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Indicación
En caso de motores con rotor de desplazamiento de corriente no es necesarioefectuar ajustes para compensar la resistencia del rotor.
Tabla 4-28 Parametrización borne de medición
Nombre de señal P nto de medidaParametrización
Nombre de señal Punto de medidaDirección F. decalaje p. ej.
Velocidad real Hembrilla X1 P–076 = 1110H P–077 = 0H
Acción I delregulador velocidad
Hembrilla X2 P–072 = 117CH P–073 = 2H
Efectuar el ajuste con el accionamiento desbloqueado y en modo oscilación.
Utilizando el generador de oscilación, prescribir saltos de consigna dentro delmargen de velocidades de n = 2 P–172 hacia n = nmáx.
Con el parámetro P–168, ajustar la acción I del regulador de velocidad deforma que se elimine el transitorio (rebase) al final de la fase de aceleración.
P–168 excesivoP–168 insuficiente P–168 correcto
Par de fricción
t [ms]
Velocidad real Velocidad real Velocidad real
t [ms] t [ms]
t [ms]t [ms]t [ms]
Acción I delregulador velocidad
Acción I delregulador velocidad
Acción I delregulador velocidad
Figura 4-7 Optimización resistencia del rotor
P–168Resistencia del rotor
Módulos de motor asíncrono (AM)4.7 Optimización manual
07.94

AM
10.00
AM/5-75 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Diagnóstico y análisis de fallos
5.1 Herramientas de diagnóstico
5.1.1 Indicación en display de valores medidos
Precaución
Cuando se suprimen los impulsos de alimentación al motor ya no existe infor-mación relativa a su velicodad. Por ello se pone a 0 la velocidad real calculada.Por este motivo, las indicaciones de velocidad real carecen de carácter repre-sentativo.Con excepción de P–133 (velocidad real BERO), en el caso de que se realicevigilancia de velocidad
Tabla 5-1 Indicación en display de valores medidos
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
(P–001)(P–101)
– ––32000...32000
r/minConsigna de velocidad
(P–002)(P–102)
– ––32000...32000
r/minVelocidad real
(P–003) – – –399,0...399,0 % Intensidad formadora de parreferida a la intensidad nominal del motor
(P–004) – – 0,0...100,0 % Tasa de utilizaciónreferida a la limitación activa
(P–005) – – –1250...1250 Hz Frecuencia de la máquina
(P–006) – – 0...700 V Tensión de circuito intermediose mide vía NE ó ÜM o bien vía P–061
(P–007) – – –399,0...399,0 % Intensidad de motorreferida a la intensidad nominal del motor
(P–008) – – 0,0...399,0 % Componente de intensidad de camporeferida a la intensidad nominal del motor
(P–009) – – 0,0...399,0 % Potencia activareferida a la potencia nominal del motor
(P–010) – – 0...450 Vef Tensión real
(P–110) – – 0...170C Temperatura en motor
(P–133) – – 0...65535 r/min Velocidad real BERO
(P–037) – – 2,8 kHz...7,8 kHz Frecuencia de pulsación del ondulador
Módulos de motor asíncrono (AM)
5
12.9404.97
5.1 Herramientas de diagnóstico

AM
10.00
AM/5-76 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.2 Indicaciones de estado
v. apt. 2.2.1
Tabla 5-2 P–011 Estado de las entradas binarias
Display
Valor vi-sual.
–
B.63
Desbloqueo im-pulsos central
B.E9
programablevía P–089
B.E5
programablevía P–085
B.E1
programablevía P–081
–
B.64Desbloqueo ac-
cionamientocentral
B.663
Desbloqu. imp.específ. eje
B.E6
programable víaP–086
B.E2
programablevía P–082
–
B.112abiertoModo
preparación
B.65
Desbloque. imp.específ. eje
B.E7
programablevía P–087
B.E3
programablevía P–083
–
B. R
Acuse de falloscentral
B.81abierto
Paro rápidog. rampas
B.E8
programablevía P–088
B.E4
programablevía P–084
La indicación de varias señalizaciones es posible, en este caso se obtiene la suma hexadecimal.Ejemplo: 4H + 8H = CH
P–000, P–100Visualización deestado
P–011 Estado de las en-tradas binarias
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico
07.94

AM
10.00
AM/5-77 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-3 P–254 Indicación de las funciones activas 1
Display
Valor vi-sual.
–
Fcn. Nº 13
Generador ram-pas 2
Fcn. Nº 9
EscalónBit 0
–
Fcn. Nº 1
2º límitede par
–
Fcn. Nº 14
Aumentar consi-gna
Fcn. Nº 10
EscalónBit 1
–
Fcn. Nº 2
Oscilación
–
Fcn. Nº 15
Reducir consi-gna
Fcn. Nº 11
EscalónBit 2
Fcn. Nº 7
Tiempo acciónintegralTH = 0
Fcn. Nº 3
Borrar memoriade fallos
(acuse fallo)
–
Fcn. Nº 16
Desbloqueoconsigna
Fcn. Nº 12
Giro horario/anti-horario
– –
La indicación de varias señalizaciones es posible, en este caso se obtiene la suma hexadecimal.Ejemplo: 4H + 8H = CH
P–254Indicación delas funciones activas 1
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico
07.94

AM
10.00
AM/5-78 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-4 P–020 Indicación de las funciones activas 2
Display
Valor vi-sual.
– – –
Fcn. Nº 21
Selección mo-tor Bit 1
Fcn. Nº 17
Consigna fijaBit 0
– – –
Fcn. Nº 24
Consigna fijaBit 3
Fcn. Nº 18
Consigna fijaBit 1
– – – –
Fcn. Nº 19
Consigna fijaBit 2
– – – –
Fcn. Nº 20
Selección mo-tor Bit 0
La indicación de varias señalizaciones es posible, en este caso se obtiene la suma hexadecimal.Ejemplo: 4H + 8H = CH
P–255 Indicación delas funciones activas 2
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico
12.94

AM
10.00
AM/5-79 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.3 Parámetros de diagnóstico
Tabla 5-5 P–255 Autoajustes realizados
Display
Valor vi-sual.
– – –
Autoajuste5
Corrección mo-mento inercia
Autoajuste1
Optimizaciónregulador inten-
sidad fase
– – –
Autoajuste6
Corrección resi-stencia rotor
Autoajuste2
Corrección partepotencia
– – –
Autoajuste7
Cálculo regula-dor velocidad
Autoajuste3
Corrección in-tensidad en
vacío
– – –
Autoajuste8
Corrección velo-cidad debil.
campo
Autoajuste4
Corrección reac-tancia campo
principal
La indicación de varias señalizaciones es posible, en este caso se obtiene la suma hexadecimal.Ejemplo: 4H + 8H = CH
P–020 Autoajustes realizados
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico
12.94

AM
10.00
AM/5-80 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-6 Diagnóstico y suma de chequeo parámetros
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
(P–028) – – 0...FFFFH Diagnóstico
Bit Valor
13 2000H Interrupción por divisiónPor fallo en la rutina de cálculo de-bido a introducción incorrecta dedatos
(P–200) – – 0...FFFFH Suma de verificación de parámetrosEn cada operación de salvaguarda (P–052 = 1H) seforma la suma de verificación de los contenidos delos parámetros. Esto permite detectar cualquier mo-dificación en los parámetros de máquina.
5.1.4 Hembrillas de medida X1, X2, IR
Función
Datos técnicos
Asignación
Normalización IR
Parametrización X1 (DAU 3), X2 (DAU 4)
Salida analógica del valor real de la intensidad de fase y de las variables enRAM para fines de medida y de diagnóstico.
Valor real de intensidad de fase en hembrilla IR
2 canales de salida X1 (CDA 3) y X2 (CDA 4)
Margen de tensión 0...+ 5 V (valor 0 corresponde a +2,5 V)
Normalización grosera, compensación de offset para X1 y X2 vía paráme-tros
Sinopsis
Función
Datos técnicos
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico
12.94

AM
10.00
AM/5-81 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
X1 X2
IR M
X1:
X2:IR:M:
Hembrilla CDA 3
Hembrilla CDA 4Intensidad real fase RMasa de referencia
Figura 5-1 Asignación de las hembrillas de medida
Tabla 5-7 Normalización IR
Código parte potencia (P–095) Normalización IR
1 8 A corresponde a 8,25 V
2 15 A corresponde a 8,25 V
4 25 A corresponde a 8,25 V
6 50 A corresponde a 8,25 V
7 80 A corresponde a 8,25 V
8 160 A corresponde a 8,25 V
9 160 A corresponde a 8,25 V
10 200 A corresponde a 8,25 V
11 300 A corresponde a 8,25 V
12 400 A corresponde a 8,25 V
13 120 A corresponde a 8,25 V
Asignación
Normalización in-tensidad de fase IR
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico
03.96

AM
10.00
AM/5-82 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-8 Parametrización X1 (CDA 3), X2 (CDA 4)
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–076 online 4 0...FFFF Hex Dirección CDA 3Dirección de la variable en RAM a sacar vía elCDA 3.Preajustado: 1110H velocidad real calculada1 V corresponde a 15000 1/min
P–077 online 4 0...F Hex Factor de decalaje CDA 3Normalización grosera del valor seleccionado pordesplazamiento a la izquierda del número binario.Desplazam. a la izda. en 1 1 = multiplicación por 2 Ganancia máx.: 32768
P–080 online 4 –127...127 Dec Offset CDA 3Compensación de un eventual offset de CDA 3
P–072 online 4 0...FFFF Hex Dirección CDA 4Preajustado: 10D2H Intensidad formadora de par1 V corresponde a 1,6 Inom motor
P–073 online 4 0...F Hex Factor de decalaje CDA 4
P–074 online 4 –127...127 Dec Offset CDA 4
2000H
0,0
+2,5
+5,0
Tensión de salida [V]
0000H 4000H 6000H 8000H A000H C000H E000H FFFFH
1er rebase 2º rebase 3er rebase 4º rebase
Factor decalaje = 0Factor decalaje = 2
Offset = 0 VNormalización fina = 100 %
Valor hexadecimal
Indicación
En el anexo (apt. 6.5) figura una lista de los principales magnitudes de medida(variables en RAM) con sus direcciones.
ParametrizaciónX1 (CDA 3), X2 (CDA 4)
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico
07.94

AM
10.00
AM/5-83 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.5 Memoria de valores mínimos/máximos
Vigilancia del rebase de umbral mínimo/máximo para las variables en RAM.
Tabla 5-9 Memoria de valores mínimos/máximos
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–181 online 4 0...FFFF Hex Dirección para memoria mín./máx.(dirección para variables en RAM)Este valor puede salvaguardarse en la memoria deparámetros de máquina del accionamiento.
P–179 online 4 0...3 Hex Selección memoria mín./máx.0H: Parada de la función de memoria1H: Arranque de la función de memoria con evalua-
ción en valor absoluto2H: Arranque de la función de memoria con evalua-
ción bipolar3H: Parada de la función de memoria
(P–182) – – 0...FFFF Hex Valor mínimo memoria mín./máx.
(P–183) – – 0...FFFF Hex Valor máximo memoria mín./máx.
Indicación
En el anexo (apt. 6.5) figura una lista de los principales magnitudes de medida(variables en RAM) con sus direcciones.
Función
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico5.1 Herramientas de diagnóstico
07.94

AM
10.00
AM/5-84 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.6 Función de registro de transitorios
Registro simultáneo de dos variables en RAM y salidas vía hembrillas de me-dida X1 y X2.
Registro en paralelo de dos señales de 16 bits
640 palabras de profundidad de registro
Período de muestreo 1 ms (P–090, Bit 3=0) ó 0,6 ms (P–090, Bit 3=1, a par-tir de FW 3.00)
Condición de arranque/parada (condición de disparo)
Salida cíclica vía CDA
Condición de disparo para la salida
Tabla 5-10 Parametrización
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–207 online 4 0...C Hex Ajuste registrador de transitoriosRegistro de dos variables en RAM durante 640 mscon muestreo cada 1 ms.1H: Arranque por P–206 sin condición de arranque/
paradaArranque por P–206 = + 1. Stop 640 ms tras introducción
2H: Condición de arranque P–208 y P–209, sin con-dición de paradaArranque por P–206 = +1. Stop 640 ms trascondición de arranque
5H: Condición de parada P–210 y P–211, sin condi-ción de arranqueArranque por P–205 = +1. Registro durante losúltimos 640 ms antes de la condición de parada
6H: Registro con condiciones de arranque/paradamáx. 640 ms
4H: Prerregistro en memoria vía P–217Una vez realizado el registro vuelve a ponerse a 0 elparámetro.
P–212 online 4 0...FFFF Hex Dirección señal 1En el anexo (apt. 6.5) figura una lista de los principa-les magnitudes de medida (variables en RAM) consus direcciones.
P–213 online 4 0...FFFF Hex Dirección señal 2
Función
Datos técnicos
Parametrización
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico5.1 Herramientas de diagnóstico
04.97

AM
10.00
AM/5-85 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-10 Parametrización
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–208 online 4 0...FFFF Hex Dirección para condición de arranqueDirección de la variable en RAM que lanza el regis-tro.
P–209 online 4 0...FFFF Hex Umbral para condición de arranqueMáscara de condición de arranque que se comparacon la variable en RAM definida en P–208
P–210 online 4 0...FFFF Hex Dirección para condición de parada
P–211 online 4 0...FFFF Hex Umbral para condición de parada
P–206 online 4 0...1 Hex Selección registrador de transitoriosLanzamiento de la función de registro de transitoriospor puesta a P–206 = +1.Una vez realizado el registro vuelve a ponerse a 0 elparámetro.
P–215 online 4 0...15 Dec Factor de decalaje señal 1v. descripción Hembrillas X1, X2
P–216 online 4 0...15 Dec Factor de decalaje señal 2
P–217 online 4 0...FFFF Hex Señal de disparo 1Amplitud de señal disp. “low” para salidas CDA con1 ms de duración.En caso de introducir diferentes niveles de señal enP–217 y P–218, se emite un flanco al que sigue laseñal registrada.
P–218 online 4 0...FFFF Hex Señal de disparo 2Amplitud de señal disp. “high” para salidas CDA con1 ms de duración.
P–214 online 4 0...1 Hex Arranque salida de registroSalida cíclica de valores registrados vía CDA. La salida vuelve a repetirse cíclicamente hasta quevuelva a ponerse a 0 el parámetro.Señal registrada 1 → CDA 3 (X1)Señal registrada 2 → CDA 4 (X2)La asignación precedente de los CDA se conservaen memoria y se restablece al final de la función desalida.
Indicación
En el anexo (apt. 6.5) figura una lista de los principales magnitudes de medida(variables en RAM) con sus direcciones.
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico5.1 Herramientas de diagnóstico
07.94

AM
10.00
AM/5-86 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.1.7 Mando intensidad/frecuencia
Precaución
Si un accionamiento opera durante un tiempo prolongado en el margen en lazoabierto (mando) es preciso procurar una refrigeración suficiente del motor yaque se establece una intensidad del orden de magnitud de la intensidad nomi-nal (porcentaje en P–057).
Tener particular cuidado con motores que se refrigeren con ventilador solidarioal eje.
Diagnóstico en caso de parametrización errónea en margen en lazo abierto.
Para fines de prueba, el motor puede funcionar con control o mando de intensi-dad/frecuencia. En este caso no actúan los reguladores de velocidad y decampo.
La velocidad de conmutación lazo cerrado/lazo abierto, P–172, deberá aju-starse a un valor tal que no se sobrepase durante este tipo de prueba.
Por encima de la velocidad de paso a debilitamiento de campo (P–173), el valorde la intensidad deberá elegirse inferior al valor de la intensidad en vacío yaque si no se activa la limitación de tensión. Esto se traduce en un giro irregulary en golpes de par.
Tabla 5-11 Mando intensidad/frecuencia
Atributos de parámetros
Número Modif. ac-tiva
P–051 Margen de ajuste Descripcióntiva
g j p
P–057.M online 4 0...150 % Consigna de intensidad en margen en lazo ab-iertoPorcentaje de la intensidad nominal del motorCons. de intensidad para control intensidad/frecuen-cia
P–058.M online 4 0...399 % Par acelerador en lazo abiertoPorcentaje del par nominal del motor
P–172.M online 4 0...32000 r/min Velocidad de conmutación lazo cerrado/abiertoLa conmutación se realiza con una histéresis de200 r/min.
Función
Observación
Módulos de motor asíncrono (AM)5.1 Herramientas de diagnóstico5.1 Herramientas de diagnóstico
07.94

AM
10.00
AM/5-87 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.2 Análisis de fallos
5.2.1 Indicación y acuse de fallos
Código de fallo (v. tabla 5–12)
Display
inactivo
= Fallo
1 fallo
varios fallos, conmutación con
por
P
PPulsando la tecla estando bloqueado el regulador. Si es posible
acusar la indicación de fallo, se retorna al programa de servicio.
Si no es posible acusar la señalización de fallo (la existencia de fallos), laindicación puede inhibirse pasajeramente.
Acuse a distancia
Aplicación de señal en uno de los bornes siguientes estando bloqueado elregulador:
– Borne “R” (Reset) del módulo NE o del módulo de vigilancia
– Borne “Borrar memoria fallos” (borne programable) del módulo AM
– B.“65” Interrumpir desbloqueo regulador (sólo cuando el bit 5 en P–053está puesto a 1)
Reset por apagado/encendido
Apagar el aparato y volverlo a encender 2 s después de que se apague eldisplay.
por
–
–Pulsando la tecla es posible retornar al programa de servicio
durante aprox 1 minuto sin tener que acusar el fallo.
Indicación de fallos
Acuse de fallos
Inhibición de fallos
Módulos de motor asíncrono (AM)5.2 Análisis de fallos
07.94

AM
10.00
AM/5-88 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5.2.2 Lista de indicaciones de fallo
Precaución
Cuando se suprimen los impulsos al motor no se dispone ya de informaciónsobre su velocidad. Con ello se pone a 0 la velocidad real calculada. Las seña-lizaciones de fallos pueden provocar la supresión de impulsos al motor.
Tabla 5-12 Lista de indicaciones de fallo
Código fallo Fallo Causa
F–04Error en conversiónD/A
Si aparece con frecuencia, defecto en la tarjeta de regulación
F–05 Intensidad motor = 0
Se han aplicado todas las señales de desbloqueo pero no existeningún motor conectado o
no se ha excitado un contactor de mando de motor.
Se han aplicado todas las señales de desbloqueo pero está ajustado y0 como mínimo uno de los parámetros P–160, P–166, P–057 ó P–059.
Fusible circuito intermedio quemado
Interrupción en el embarrado del circuito intermedio
F–07Salvaguarda de datosen EPROM Flash fal-lida
Si esta indicación es repetitiva durante la salvaguarda, existe un de-fecto a nivel de la EPROM flash (FEPROM).
Si esta indicación se presenta inmediatamente antes de enceder elconvertidor, este último ha sido apagado durante la salvaguarda. Eneste caso no se salvaguardan las modificaciones de los parámetros.Es necesario iniciar una nueva salvaguarda.
F–08Pérdida irremediablede datos
EPROM Flash defectuosa → cambio del módulo de regulación
F–11Consigna frecuencia> frecuencia máx.
Cable plano unidad de regulación – tarjeta de mando de semiconduc-tores defectuoso o no conectado
Motor no conectado o falta fase
Fallo de alimentación de la tarjeta de mando de semiconductores
Fusible circuito intermedio quemado
Interrupción en el embarrado del circuito intermedio
Motor desenganchado por considerable error de ajuste en los paráme-tros del motor o regulador
Módulo AM conectado a un mód. de vigilancia sin dispositivo de me-dida de la tensión en el c. intermedio y en P–061 no se ha registradoningún valor para dicha tensión
Al conmutar de escalón se ha reducido la limitación de velocidad,P–029, a pesar de que el motor gira por encima de la misma.
Motor defectuoso
F–13Regulador de campoal máximo
Gran error de ajuste en los datos del motor o reguladores
No concuerdan los datos del motor registrados y el tipo de conexión
Y/ del motor
Motor desenganchado por considerable error de ajuste en los paráme-tros del motor o regulador
Módulos de motor asíncrono (AM)5.2 Análisis de fallos
03.96

AM
10.00
AM/5-89 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 5-12 Lista de indicaciones de fallo
Código fallo CausaFallo
F–14Fallo sobretempera-tura motor
Motor sobrecargado
Intensidad en motor excesiva, p. ej. datos erróneos del motor
Sonda de temperatura defectuosa (motor)
Ventilador de motor defectuoso
Corto entre espiras en motor
F–15Sobrecalentamientoconvertidor
Convertidor sobrecargado (correspondencia motor/módulo convertidorerrónea, ciclo de carga erróneo, frecuencia de reloj demasiado alta)
Temperatura ambiente excesiva
Ventilador en el módulo AM averiado
Sonda de termperatura en el módulo AM defectuosa
Acuse tras enfriamiento por debajo de 50 C15 K por apagado yencendido de la tensión de red.
F–16Código de parte depotencia inadmisible
Código 3 erróneo en P–095 (en caso de partes de potencia sin recono-cimiento automático)
Código erróneo seleccionado en P–095 (en caso de partes de poten-cia con reconocimiento automático). a partir de FW 3.00
F–17I0 mot > Inom parte depotencia
Correspondencia motor/módulo convertidor errónea
F–19
Sonda de tempera-tura en motor
Rotura
Cortocircuito
sólo KTY 84
Sonda de temperatura defectuosa
Conexión a la sonda interrumpida o cortocircuitada
F–51Error de parametriza-ción: Par nominal ex-cesivo
Par nominal (calculado) a partir de P160.M y P163.M es mayorque 650 Nma partir de FW 2.00
F–52Error de parametriza-ción: Constante depar no permitida
Relación no permitidaP–160.M V P–164.M
P–161.M V P–163.M V P–171.M
a partir de FW 2.00
F–53
Error de parametriza-ción: intensidad nomi-nal de motor dema-siado baja
La relación entre intensidad nominal del motor y la intensidad nominal de laparte de potencia es demasiado baja
F–60Error durante el autoajuste
Operación de autooptimización interrumpida
Autooptimización no ha dado resultados útiles
Actúa la limitación de velocidad (P–029, P–174)nmáx < (fnom . 60 s/min)/p
Tipo de conexión / y datos nominales permutados
Otras causas, v. cap. 4
F–90Superada velocidadmáxima BERO
Número de rayas P131.M parametrizada erróneamente
Rotura del cable
Módulos de motor asíncrono (AM)5.2 Análisis de fallos
04.97

AM
10.00
AM/5-90 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
tras
Red ON (puesta bajo tensión)
Visualización de estado inactiva
– Corte de al menos dos fases (módulo NE–UW)
– Fusión de al menos dos fusibles de entrada (módulo NE–UW)
– Fallo de alimentación de electrónica en módulo NE–UW
– Enlace de bus interno (cable plano) entre módulo AM y módulo NE–UWno establecido (cable no enchufado o defectuoso)
– Módulo AM defectuoso
– EPROM/FEPROM defectuosa
– Firmware no cargado
Desbloqueo del regulador
El motor gira en sentido antihorario a pesar de que el módulo AM prescribecampo giratorio horario, o viceversa
– Campo giratorio en sentido erróneo, debido a cruzamiento de dos fases(permutar la conexión de dos fases).
Fallos
Módulos de motor asíncrono (AM)5.2 Análisis de fallos
07.94

AM
10.00
AM/6-91 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Anexo
6 AnexoMódulos de motor asíncrono (AM)07.94
6

AM
10.00
AM/6-92 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.1 Diagrama de flujo para nueva puesta en marcha
Precaución
Si se acusa un fallo presente en el módulo NE estando desbloqueado elmódulo AM, el accionamiento acelera hasta ncons.
Indicación
Si se produce un corte de red durante la salvaguarda, los valores modificadosdesde la primera salvaguarda se pierden y, al restablecerse la tensión, el con-vertidor señaliza el fallo “F–07”. Tras acusar la señalización de fallo “F–07”(v. apt. 5.2.2), pueden ajustarse de nuevo los valores de los parámetros.
START
sí¿Display aún
apagado?
no
Antes de encender el equipo convertidor:
Verificar datos ajustados y conexiones con ayuda del esquema
Desactivar o anular por desconexión todas las señales de desbloqueo en elmódulo NE (B.63, B.64) y módulo AM (B. 663, 65, 81).
Determinar el código de la parte de potencia en base a la referencia delmódulo (v. apt. 6.2).
sí Fallo (v. apt.5.2.2)
1 2
no
sí
¿Visualización de “P–000”
(v. apt. 1.3)?
no
Fallo (v. apt.5.2.2)
Encender el equipoconvertidor (red ON)
¿“F–...”intermitente?
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
07.94

AM
10.00
AM/6-93 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
1 2
El módulo ya ha sido puestoen marcha. Para adaptarlo aun nuevo motor, en primer lu-gar es necesario restablecerel estado base (inicializa-ción).
En P–095 ajustar o comprobar elcódigo de la parte de potencia
Esperar a que se apague la visua-lización de estado P–000
(v. apt. 2.2.1)
no
En P–061 ajustar la tensión fija delcircuito intermedio (V)
3
¿Opera el módulo AM conectado al businterno de un módulo de vigilancia sin
medición de la tensión del circuito inter-medio?
Función no posible en combi-nación con tensión de cir-cuito intermedio no regulada(v. apt. 2.1)
sí
Ajustar P–051 a 4H (supresión de laprot. de escritura)
Ajustar P–097 a 0H(lanzar inicialización)
Ajustar P–052 a 1H(escritura en FEPROM)
Esperar a la puesta a 0H de P–052,después apagar el convertidor y vol-verlo a encender 2 s después de quese apague la visualización de estado.
Indicación de “P–095” ó “P–097”
Ajustar P–097 a 1HSe visualiza “SEtUP”
Ajustar P–051 a 4H (supresión de laprot. de escritura)
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
07.94

AM
10.00
AM/6-94 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
3
Introducir los parámetros siguientes1)
P–158 Inductancia de la bobina serie (mH)P–160 Pot. nom. motor (kW) para servicio S12)
P–161 Intens. nom motor (A) para servicio S12)
P–162 Tensión nominal motor (V)P–163 Velocidad nominal motor (r/min)P–164 Frecuencia nominal motor (Hz)P–174 Velocidad máx. motor (r/min)
4
Estos datos de ajuste pueden tomarsede la placa de características conformea VDE 0530 parte 1 (HA10) del motorutilizado.
P–056, ajustar la selección del motor aljuego de parámetros a tratar
no¿Datos del esquema equivalente
del motor conocidos?
sí
Introducir el factor de potenciacos ϕ P–1781)2)
Si no hay intercalada bobina entremódulo AM y motor, es necesario intro-ducir 0 en P–158.
Introducir los parámetros siguientes1)
P–166 Intensidad vacío motor (A)P–167 Resistencia estator ()P–168 Resistencia rotor ()P–169 Reactancia dispersa estator ()P–170 Reactancia dispersa rotor ()P–171 Reactancia campo ppal. ()
Calcular datos esquemaequvalente
Ajustar P–153 a +1H
no¿Momento de inercia total1)
aprox. conocido?
sí
P–1591), introducir momento de inercia de motor ycarga (gm2). En caso de valor de ajsute insufi-ciente, introducir momento de inercia adicional
P–2191) (kgm2).
Calcular datos de reguladores
Ajustar P–153 a –1HRepetir esta secuencia para to-dos los juegos de datos de mo-
tor modificados
1) Es posible introducir datos de ajuste de hasta 4 motores diferentes (subparámetros 1 a 4)2) En caso de motores con refrigeración forzada, v. indicaciones en apt. 2.1
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
12.94

AM
10.00
AM/6-95 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
no¿Motor con rotor de desplazamiento
de corriente?
sí o descono-cido
P–0181) Incrementar redondeo iniciala aprox. 30,00 ms
4
no¿Se ha ajustado una frecuencia
de pulsación > 3,3 kHz?
sí
Incrementar la frec. de pulsación enP–0361) (v. apt. 4.2.)
Respetar la reducción de po-tencia necesaria en este caso(v. apt. 4.2)
Ajustar P–056 al juego de parámetrosde motor a tratar
Prescribir consigna de velocidad 0 Ven los bornes 56 y 14(se indica en P–001)
510
Ajustar P–052 a 1H
Esperar la puesta a 0H de P–052. Losvalores ajustados se transfieren a laEPROM Flash.
1) Es posible introducir datos de ajuste de hasta 4 motores diferentes (subparámetros 1 a 4)
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
07.94

AM
10.00
AM/6-96 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
5
Suprimir paro rápido delg. rampas. Aplicar tensión dedesbloqueo en borne 81.
síno
Aplicar tensión de desbloqueoen el borne programable Habili-tación consigna.
Aumentar ligeramente la consigna de velocidad.
7
Estado de los dos dígitos centrales de lavisualización de estado “P–000” tras laconmutación (v. apt. 2.2.1)
no¿El motor empieza agirar y reacciona a consigna de ve-
locidad?
F–05F–11
Prescribir consigna velocidad 0.
v. apt. 5.2.2
Todos los desbloqueos están ausentesen módulos NE y AM.
Aplicar tensión de desbloqueo entodo el módulo NE.
Aplicar tens. de desbloqueo al borne663 del módulo AM (desbloqueo deimp. de eje).
Aplicar tens. de desbloqueo al borne65 del módulo AM (desbloqueo de re-guladores)
¿Funciónborne 16 (des-
bloqueo consigna)activada?
sí
Suprimir paro rápido delg. rampas. Aplicar tensión dedesbloqueo en borne 81.
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
07.94

AM
10.00
AM/6-97 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Ajustar P–204 a 3 (ajuste intensidad en vacío)Ajustar P–205 a 1 (lanzar autooptimización)Esperar hasta que P–205 retorne a 0.
Ajustar P–204 a 1 (ajustar regulador intensidad)Ajustar P–205 a 1 (lanzar autooptimización)Esperar hasta que P–205 retorne a 0.
7
Ajustar P–204 a 2 (corrección offset potencia)Ajustar P–205 a 1 (lanzar autooptimización)Esperar hasta que P–205 retorne a 0.
no ¿Velocidad máx. motor > 6000 r/min?
sí
Controlar el ajuste de P–031, P–032 (regulador de veloci-dad); dado el caso, modificarlo
Controlar el ajuste de P–034, P–035 (reguladorde campo); en caso dado, modificarlo
Incrementar limitación de velocidad (P–029) a la consignade velocidad máxima del motor.
¡Atención!El motor se mueve en vacíocon campo horario.
8
no¿Se visualiza en el display F–60 ó
F–17?
síFallo (v. apt. 5.2.2)
Ajustar P–051 a 10H (supresión de laprot. de escritura)
Nota:Para optimizar la intensidaden vacío, ajustar P–174 yP–029 como mínimo a la velo-cidad nominal síncrona.
1)
1) Ya no es necesario a partir de FW 3.00
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
03.96
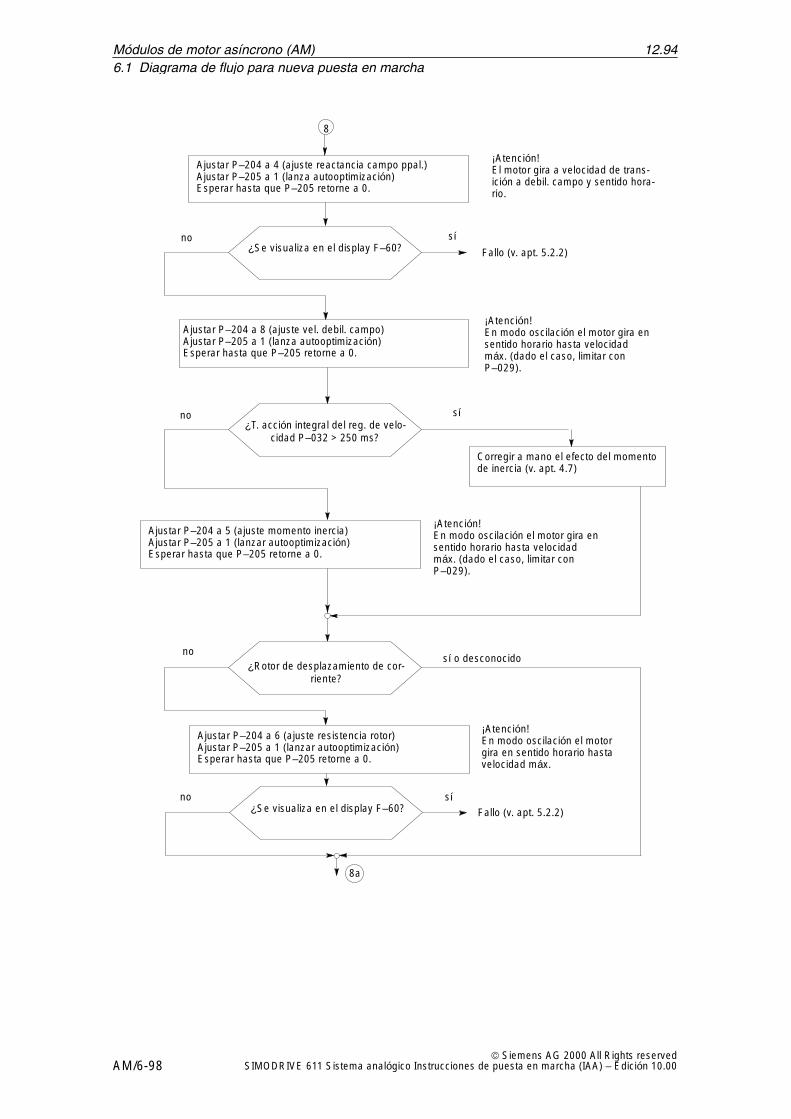
AM
10.00
AM/6-98 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
8
Ajustar P–204 a 4 (ajuste reactancia campo ppal.)Ajustar P–205 a 1 (lanza autooptimización)Esperar hasta que P–205 retorne a 0.
¡Atención!El motor gira a velocidad de trans-ición a debil. campo y sentido hora-rio.
no¿Se visualiza en el display F–60?
sí
Ajustar P–204 a 5 (ajuste momento inercia)Ajustar P–205 a 1 (lanzar autooptimización)Esperar hasta que P–205 retorne a 0.
¡Atención!En modo oscilación el motor gira ensentido horario hasta velocidadmáx. (dado el caso, limitar conP–029).
¿Rotor de desplazamiento de cor-riente?
sí o desconocido
Fallo (v. apt. 5.2.2)
¿T. acción integral del reg. de velo-cidad P–032 > 250 ms?
Corregir a mano el efecto del momentode inercia (v. apt. 4.7)
¡Atención!En modo oscilación el motorgira en sentido horario hastavelocidad máx.
¿Se visualiza en el display F–60? Fallo (v. apt. 5.2.2)
Ajustar P–204 a 6 (ajuste resistencia rotor)Ajustar P–205 a 1 (lanzar autooptimización)Esperar hasta que P–205 retorne a 0.
8a
Ajustar P–204 a 8 (ajuste vel. debil. campo)Ajustar P–205 a 1 (lanza autooptimización)Esperar hasta que P–205 retorne a 0.
¡Atención!En modo oscilación el motor gira ensentido horario hasta velocidadmáx. (dado el caso, limitar conP–029).
síno
no
no sí
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
12.94

AM
10.00
AM/6-99 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
8a
Ajustar P–204 a 7(cálculo ajuste regulador velocidad P–031, P–032)Ajustar P–205 a 1 (lanzar autooptimización)Esperar hasta que P–205 retorne a 0.
no
¿Ajustes de regulador de velocidadP–031, P–032 optimizador a mano
(v. apt. 4.7)?
sí
9
Anular todas las señalesde desbloqueo
10
Repetir esta secuencia para todoslos juegos de parámetros de motor
modificados
Ajustar P–051 a 4H (supresión de laprot. de escritura)
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
07.94

AM
10.00
AM/6-100 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Verificar y, dado el caso, modificar los parámetros siguientes:
P–014 Normalización nconsP–015 Corrección offset nconsP–024 Normalización ncons
P–016 T. aceleración g. rampasP–017 T. deceleración g. rampas
P–029 Velocidad máx. motor nmáxMot
P–021 a P–023, Umbral de conmutación de losP–027 relés de vigilancia de velocidad
P–039 a P–043 Límites de parP–047
P–057 a P–058 Margen en lazo abierto (mando)
P–059 a P–060 Limitaciones
P–081 a P–089 Funciones debornes programables
P–113 a P–114 Consignas de velocidad
P–185 a P–194, Funciones de relésP–241 a P–246 programables
Reajustar P–056 a 0 H
9
11
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
07.94

AM
10.00
AM/6-101 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Fin
Ajustar P–051 a 0H.Restablecer la protección en escritura
no
sí
Verificar, y dado el caso modificar, todas lasfunciones parametrizadas
11
Ajustar P–052 a 1H
Esperar la puesta a 0H de P–052. Losvalores modificados se transfieren a laEPROM Flash.
¿Valoresmodificados?
Ajustar P–052 a 1H
Esperar la puesta a 0H de P–052. Losvalores modificados se transfieren a laEPROM Flash.
Tras la puesta en marcha, salvaguardar los va-lores de parámetros en un fichero o documen-tarlos en la lista.
Módulos de motor asíncrono (AM)6.1 Diagrama de flujo para nueva puesta en marcha
07.94

AM
10.00
AM/6-102 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.2 Códigos para partes de potencia
Tabla 6-1 Códigos para partes de potencia
Tipoparte depotencia
(LT)
Referencia6SN1123–1AA0–6SN1124–1AA0–6SN1140–1BA1–
Intensidadnominal desalida [A]
Intensidad de sa-lida pico
breve duraciónS6–40% 10min [A]
Intensidad de sa-lida pico
breve duraciónS6–40% 10s [A]
Código partede potencia
P–095
8 A –0HA 3 3 3 1 FW 2.10
15 A –0AA 5 5 8 2 FW 2.10
25 A –0BA 8 10 16 4
50 A –0CA 24 32 32 6
80 A –0DA 30 40 51 7
108 A –0LA 45 60 76 13 FW 2.10
120 A –0GA 45 60 76 8
160 A –0EA 60 80 102 9
200 A –0FA 85 110 127 10
300 A –0JA 120 150 193 11 FW 2.00
400 A –0KA 200 250 257 12 FW 2.00
Lugar donde figurala referencia de pedido
Figura 6-1 Posición de la referencia de pedido
Módulos de motor asíncrono (AM)6.2 Códigos para partes de potencia

AM
10.00
AM/6-103 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.3 Conexiones
Esquema de conexión SIMODRIVE 611 Sistema analógico
Bornes de conexión
Bornes de relé
Precaución
Las pantallas de los cables y los hilos no utilizados en cables de energía (p. ej.hilos para mando de freno) deberán contactarse con el potencial PE para deri-var eventuales cargas generadas por acoplamiento capacitivo.
Si no se toman estas precauciones pueden aparecer tensiones de contactocon peligro de muerte.
Nota: Si se utilizan circuitos que no tienen pequeña tensión de seguridad(PELV), en los bornes AS1 y AS2 es necesario evitar enchufar un conector cor-recto tomando la precaución de codificar el conector adecuadamente(v. EN 60204–1, apt. 6.4)Referencias de los conectores codificados, v. Catálogo NC 60.1.
Sinopsis
Módulos de motor asíncrono (AM)6.3 Conexiones
03.96

AM
10.00
AM/6-104 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Contactoseñal.Bloqueoantiarranque
PE2PE1 W2V2U2
P 600
M 600
X411
M
X431
X421
M
M
X451
X441IFRFHSS
X2X1
IR
663
A91
A92
561424
8
6581
E1E2E3E4
E5E6E7E8E9
9
289A11A21A31A41A51A61672
673674
AS1AS2
B.91)
FR+
X442
Módulo AMMódulo NE
X111
X121
P5002U11U12V11V12W11W1
74
73.273.1
72
5.35.25.1639
6419
9
74544101515R
911248111
113
AS1AS2
NS1NS2
W1V1U1 X13
1
X35
1
X15
1
X35
1
PE1
X141
X161
X171
X172
X181
FR+
FR–
P24P15N15N24MMRESET
SPPEXT
5 VUNITUZK>>
M500
a
de NC
M3
PE
FNL1L2L3
LK
FR+
FR+
213
SeñalizaciónListo
Señ. agrupadavigilancia I2t,temperatura
Desbloqueo imp..
Desblo. accio-namto.
Mando contactorPreparación
Contacto de señal.Contactor red
InterfaseRS232C
Bus interno
Circuito intermedio
B.11)
B.21)
B.31)
B.41)
B.51)
B.61)
B.71)
B.81)
externo
ncons22)
ncons1
CDA 22)
CDA 12)
interno
Contacto señal.Bloqueo anti-arranque
Listo
Relé 11)
Relé 21)
Relé 31)
Relé 41)
Relé 51)
Relé 61)
Fallo
Precaución Si entre el motor y el módulo AM está intercalado un contactor de potencia, esnecesario asegurarse de que dicho contactor sólo se maniobre en vacío (supri-mir primero los impulsos (B.663), y abrir 40 ms después el contactor).
X432 X412
Entrada BERO3) Sonda tempera-tura motor3)
Figura 6-2 Esquema de conexión
1) Entradas y salidas programables2) Función no posible con ref. 6SN1122–0BA11–0AA03) A partir de ref. 6SN112–1A0–A1
Esquema de conexiónSIMODRIVE 611 Sistema analógico
Módulos de motor asíncrono (AM)6.3 Conexiones
03.9604.97
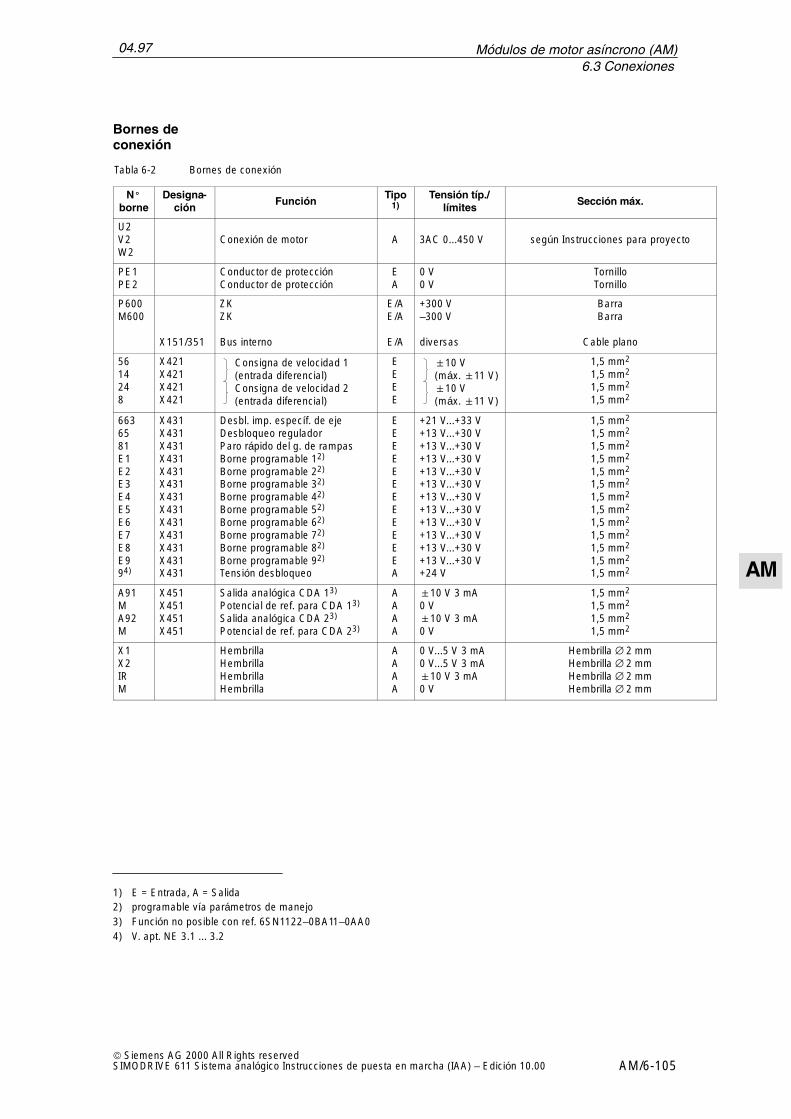
AM
10.00
AM/6-105 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-2 Bornes de conexión
Nºborne
Designa-ción
FunciónTipo
1)Tensión típ./
límitesSección máx.
U2V2W2
Conexión de motor A 3AC 0...450 V según Instrucciones para proyecto
PE1PE2
Conductor de protecciónConductor de protección
EA
0 V0 V
TornilloTornillo
P600M600
X151/351
ZKZK
Bus interno
E/AE/A
E/A
+300 V–300 V
diversas
BarraBarra
Cable plano
5614248
X421X421X421X421
Consigna de velocidad 1(entrada diferencial)Consigna de velocidad 2(entrada diferencial)
EEEE
10 V(máx. 11 V)10 V(máx. 11 V)
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
6636581E1E2E3E4E5E6E7E8E994)
X431X431X431X431X431X431X431X431X431X431X431X431X431
Desbl. imp. específ. de ejeDesbloqueo reguladorParo rápido del g. de rampasBorne programable 12)
Borne programable 22)
Borne programable 32)
Borne programable 42)
Borne programable 52)
Borne programable 62)
Borne programable 72)
Borne programable 82)
Borne programable 92)
Tensión desbloqueo
EEEEEEEEEEEEA
+21 V...+33 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+13 V...+30 V+24 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
A91MA92M
X451X451X451X451
Salida analógica CDA 13)
Potencial de ref. para CDA 13)
Salida analógica CDA 23)
Potencial de ref. para CDA 23)
AAAA
10 V 3 mA0 V10 V 3 mA0 V
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
X1X2IRM
HembrillaHembrillaHembrillaHembrilla
AAAA
0 V...5 V 3 mA0 V...5 V 3 mA10 V 3 mA0 V
Hembrilla ∅ 2 mmHembrilla ∅ 2 mmHembrilla ∅ 2 mmHembrilla ∅ 2 mm
1) E = Entrada, A = Salida2) programable vía parámetros de manejo3) Función no posible con ref. 6SN1122–0BA11–0AA04) V. apt. NE 3.1 ... 3.2
Bornes de conexión
Módulos de motor asíncrono (AM)6.3 Conexiones
03.9604.97

AM
10.00
AM/6-106 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-3 Bornes de relé
Nºborne
Designa-ción
FunciónTipo
1) Tensión típ./límites Sección máx.
289
A11A21A31A41A51A61
672673674
X441
X441X441X441X441X441X441
X441X441X441
Señalizaciones contacto
Función de relé programable 12)
Función de relé programable 22)
Función de relé programable 32)
Función de relé programable 42)
Función de relé programable 52)
Función de relé programable 62)
Listo/no hay fallo es-pecífico de eje
E
SSSSSS
SEO
30 V/6,0 A máx
30 V/1,0 A máx30 V/1,0 A máx30 V/1,0 A máx30 V/1,0 A máx30 V/1,0 A máx30 V/1,0 A máx
30 V/1,0 A máx30 V/1,0 A máx30 V/1,0 A máx
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
1,5 mm2
AS 1AS 2
X441X441
Contacto señalizaciónBloqueo antiarranque
EO
250 VAC/2,9 A máx250 VAC/2,9 A máx
1,5 mm2
1,5 mm2
Bornes de relé
Módulos de motor asíncrono (AM)6.3 Conexiones
07.94

AM
10.00
AM/6-107 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.4 Interfaces
6.4.1 X432, asignación del conector para BERO
PIN Nombre de señal Explicación
10 FR+ +24V
14 BERO Señal
15 FR– Masa
Los otros pin no deberán estar conectados.
6.4.2 X412, asignación del conector para sonda de temp. en motor
PIN Nombre de señal
14 +Temp
15 –Temp
Los otros pin no deberán estar conectados.
6.4.3 X411, interfase serie
PIN Nombre de señal
2 TxD
3 RxD
5 M5
1) E = Entrada O = NC S = NA
2) programable mediante parámetros accesibles
Módulos de motor asíncrono (AM)6.4 Interfaces
07.94

AM
10.00
AM/6-108 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.5 Direcciones de variables en RAM
Regla para todas las direcciones: dirección de segmento P–249 = 0H
Tabla 6-4 Dirección de las variables en RAM
VariableDirección
Valorcorresponde
aTiempo de
actualización cíclica
Velocidad real calculada (valor absoluto)
11B6H 7FFFH nmáx(P–174/P–029)
Frecuencia de regulador develocidad de giro como pa-rametrizada en P 090
Tasa de utilización 11B8H 7FFFH Límite de paractual
rametrizada en P–090
Velocidad real calculada 1110H 7FFFH 37499 1/min
Consigna de par 10ECH 2000H Mdnom
Intensidad absoluta (valor real) 10C6H 2000H Imot. nom
Intensidad absoluta (consigna) 10C4H 2000H Imot. nom
Intensidad formadora de par (consigna)
10D2H 2000H Imot. nom
Intensidad formadora de campo (consigna)
10CAH 2000H Imot. nom
Consigna de velocidad (tras g. ram-pas)
0E02H 7FFFH 37499 1/min
Angulo de campo (consigna) 1140H 10000H 2πAngulo de campo (valor real) 1142H 10000H 2πPotencia activa (valor real) 1148H 2000H PS nom
Potencia reactiva (valor real) 114AH 2000H PS nom
Acción I regulador de velocidad 117CH 2000H Mdnom
Acción I regulador de campo 116AH 2000H Imot. nom
Corriente magnetizante (calculada) 10E6H 2000H Imot. nom
Módulos de motor asíncrono (AM)6.5 Direcciones de variables en RAM
07.94

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-109 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
6.6 Parámetros de ajuste y control (lista de parámetros)
Casillas sombreadas: no son posibles introducciones de valores
Parámetros dependientes/subparámetros
sin nada Parámetro de validez general
M Parámetro dependiente del motor
G Parámetro dependiente del escalón de reducción
F Parámetro dependiente de la consigna fija
Tabla 6-5 Vista de conjunto de los parámetros (ayuda para la búsqueda de descripciones
P– Apt. Pág. P– Apt. Pág. P– Apt. Pág. P– Apt. Pág. P– Apt. Pág.
000 2.2.1 22 030 4.6 63 060 4.5 62 090 1.3 11 120 – –
001 5.1.1 75 031 4.14.7
5568
061 2.1 16 091 – – 121 – –
002 5.1.1 75 032 4.14.7
5568
062 – – 092 – – 122 – –
003 5.1.1 75 033 – – 063 2.2.3 25 093 – – 123 – –
004 5.1.1 75 034 4.34.7
6070
064 2.2.3 25 094 – – 124 – –
005 5.1.1 75 035 4.34.7
6070
065 2.2.3 25 095 2.1 16 125 – –
006 5.1.1 75 036 4.2 57 066 3.3.4 49 096 2.1 16 126 – –
007 5.1.1 75 037 5.1.1 75 067 3.3.4 49 097 2.1 16 127 – –
008 5.1.1 75 038 – – 068 3.3.4 49 098 – – 128 – –
009 5.1.1 75 039 2.2.3 24 069 3.3.4 49 099 2.2.2 23 129 – –
010 5.1.1 75 040 – – 070 – – 100 2.2.1 22 130 – –
011 5.1.2 76 041 2.2.3 24 071 – – 101 5.1.1 75 131 2.2.3 24
012 3.3.4 49 042 4.1 54 072 5.1.4 82 102 5.1.1 75 132 2.2.3 24
013 3.3.4 49 043 4.1 54 073 5.1.4 82 103 – – 133 5.1.1 75
014 3.1 38 044 – – 074 5.1.4 82 104 – – 134 – –
015 3.1 38 045 – – 075 – – 105 – – 135 – –
016 4.1 54 046 – – 076 5.1.4 82 106 – – 136 – –
017 4.1 54 047 3.3.2 46 077 5.1.4 82 107 – – 137 – –
018 4.1 54 048 – – 078 3.3.4 49 108 – – 138 – –
019 3.1 38 049 4.2 57 079 3.3.4 49 109 – – 139 – –
020 5.1.3 79 050 4.5 62 080 5.1.4 82 110 5.1.1 75 140 – –
021 3.3.2 46 051 1.3 10 081 3.2.2 41 111 – – 141 – –
022 2.2.3 23 052 1.3 10 082 3.2.2 41 112 – – 142 – –
023 3.3.2 46 053 1.3 10 083 3.2.2 41 113 3.1 37 143 – –
024 3.1 38 054 4.6 63 084 3.2.2 41 114 3.1 38 144 – –
025 3.1 38 055 4.6 63 085 3.2.2 41 115 4.24.7
5865
145 – –
026 – – 056 2.3 27 086 3.2.2 41 116 4.24.7
5865
146 – –
027 3.3.2 46 057 4.4 61 087 3.2.2 41 117 – – 147 – –
028 5.1.3 80 058 4.4 61 088 3.2.2 41 118 – – 148 – –
029 2.2.3 23 059 4.5 62 089 3.2.2 41 119 3.1 38 149 – –
Módulos de motor asíncrono (AM)10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-110 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Tabla 6-5 Vista de conjunto de los parámetros (ayuda para la búsqueda de descripciones
P– Pág.Apt.P–Pág.Apt.P–Pág.Apt.P–Pág.Apt.P–Pág.Apt.
150 – – 180 – – 210 5.1.6 85 240 – –
151 1.3 10 181 5.1.5 83 211 5.1.6 85 241 3.3.2 44
152 1.3 10 182 5.1.5 83 212 5.1.6 84 242 3.3.2 44
153 1.3 12 183 5.1.5 83 213 5.1.6 84 243 3.3.2 44
154 2.2.3 26 184 – – 214 5.1.6 85 244 3.3.2 44
155 2.2.3 26 185 3.3.3 47 215 5.1.6 85 245 3.3.2 44
156 2.2.3 26 186 3.3.3 47 216 5.1.6 85 246 3.3.2 44
157 2.2.3 26 187 3.3.3 47 217 5.1.6 85 247 3.3.2 46
158 2.12.3
1729
188 3.3.3 47 218 5.1.6 85 248 – –
159 4.1 56 189 3.3.3 47 219 4.1 65 249 2.5 36
160 2.12.3
1729
190 3.3.3 47 220 – – 250 2.5 36
161 2.12.3
1729
191 3.3.3 47 221 – – 251 2.5 36
162 2.12.3
1729
192 3.3.3 47 222 – – 252 – –
163 2.12.3
1729
193 3.3.3 47 223 – – 253 – –
164 2.12.3
1729
194 3.3.3 47 224 – – 254 5.1.2 77
165 – – 195 4.1 55 225 – – 255 5.1.2 78
166 4.2 59 196 4.1 55 226 – –
167 2.12.3
1730
197 4.1 55 227 – –
168 2.12.34.7
173074
198 4.1 55 228 – –
169 2.12.3
1730
199 4.1 55 229 – –
170 2.12.3
1730
200 5.1.3 80 230 – –
171 2.12.34.7
183072
201 – – 231 – –
172 2.12.3
1830
202 – – 232 – –
173 2.12.3
1831
203 4.1 55 233 – –
174 2.12.3
1829
204 4 51 234 – –
175 2.2.3 25 205 4 51 235 – –
176 2.12.3
1831
206 5.1.6 85 236 – –
177 – – 207 5.1.6 84 237 – –
178 2.12.3
1829
208 5.1.6 85 238 – –
179 5.1.5 83 209 5.1.6 85 239 – –
Módulos de motor asíncrono (AM) 10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-111 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
= n
”re
alco
ns
Dim
.1
23
45
67
8
(P–0
00)
(P–0
01)
(P–0
02)
(P–0
03)
(P–0
04)
(P–0
06)
(P–0
07)
(P–0
08)
(P–0
09)
(P–0
10)
(P–0
11)
P–0
14
P–0
15
P–0
16
P–0
17
P–0
18
P–0
19
(P–0
20)
P–0
21
P–0
22
P–0
23
P–0
24
P–0
25
P–0
27
(P–0
28)
M
–100
0,0.
..100
0,0
E00
0...2
000
0,00
...32
0,00
4,00
...10
0,00
2,0.
..10,
0
– – – – – – – – – – –
100,
0
100,
0
0
0,00 0 – 10 3000
10,0
100
–
–
P–0
12
P–0
13
2.2.
1
5.1.
1
5.1.
1
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
5.1.
1
5.1.
1
5.1.
1
5.1.
1
5.1.
1
5.1.
1
5.1.
1
5.1.
2
3.3.
4
3.3.
4
3.1
3.1
4.1
4.1
4.1
3.1
5.1.
3
3.3.
2
3.3.
2
3.3.
2
2.2.
3
5.1.
3
3.1
3.1
(P–0
05)
1.10
–
–100
0,0.
..100
0,0
M M0,
00...
320,
000,
00
M0,
00
E00
0...2
000
M G M
0...0
0FF
2...1
6000
2...1
6000
8
G0.
..320
00
2,0.
..10,
010
,0
G0.
..320
00
0...F
FF
F
5.1.
1
–320
00...
3200
0
–320
00...
3200
0
–320
00...
3200
0
–399
,0...
399,
0
0,0.
..100
,0
–125
0...1
250
0...7
00
0,0.
..399
,0
0,0.
..399
,0
–399
,0...
399,
0
0,0.
..450
,0
0...F
FF
F
Valo
res
aju
stad
os
r/m
in
% % hex s s ms
hex
r/m
in
r/m
in V
r/m
in
hex
r/m
in % V %
hex
r/m
in
r/m
in
Hz %% % V hex V
n máx
Mot
Pre
fija
do
Mar
gen
de
aju
ste
Car
act.
espe
cial
es
firm
-w
are
Vers
.A
pt.
Des
ign
ació
nN
o. P
Dia
gnós
tico
Vis
ualiz
ació
n de
est
ado
Vel
ocid
ad r
eal
Con
sign
a de
vel
ocid
ad
Inte
nsid
ad fo
rmad
ora
de p
ar
Tasa
de
utili
zaci
ón
Tens
ión
circ
uito
inte
rmed
io
Inte
nsid
ad m
otor
Com
pone
nte
corr
ient
e de
cam
po
Pot
enci
a ac
tiva
Tens
ión
real
Est
ado
de e
ntra
das
bina
rias
Nor
mal
izac
ión
CD
A c
anal
1
Nor
mal
izac
ión
CD
A c
anal
2
Vel
ocid
ad ú
til m
áx. d
el m
otor
Cor
recc
ión
offs
et c
anal
con
sign
a 1
Tie
mpo
ace
lera
ción
g. r
ampa
s 1
Tie
mpo
dec
eler
ació
n g.
ram
pas
1
Red
onde
o in
icia
l
Cor
recc
ión
offs
et c
anal
con
sign
a 2
Aut
oaju
ste
ejec
utad
o
Um
bral
de
bloq
ueo
de im
puls
os
para
señ
aliz
ació
n ”
Nor
mal
izac
ión
cana
l de
cons
igna
1
Nor
mal
izac
ión
cana
l de
cons
igna
2
nm
ínpa
ra s
eñal
izac
ión
”nre
al<
nm
ín”
nx
nre
al<
nx”
Ban
da to
lera
ncia
señ
al. ”
n
Fre
cuen
cia
máq
uina
Módulos de motor asíncrono (AM)10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-112 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
0,00
...32
0,00
0...3
2000
Dim
.1
23
45
67
8
P–0
31
P–0
32
Fre
cuen
cia
de p
ulsa
ción
del
ond
ulad
or
10,0
...60
00,0
0,0.
..600
,0
5,0.
..600
,0
0...7
0...3
99
0,0.
..100
,0
0...7
FF
F
0...1
0 100
50 5,00
5,00 0 0 1 0
ms ms
P–0
34
P–0
35
G
0,0.
..255
,9
P–0
36
P–0
39
P–0
41
P–0
42
P–0
43
P–0
47
P–0
52
P–0
53
P–0
54
0...F
FF
F
50,0
140,
0
40,0
30,0
% % s % hex
dec
hex
P–0
55
P–0
56
P–0
50
P–0
51
1.10
4.1
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
4.1
4.3
4.3
4.2
2.2.
3
2.2.
3
4.1
4.1
3.3.
2
4.5
1.3
1.3
4.6
4.6
2.3
1.3
P–0
290.
..320
0060
00
P–0
30M
0...3
2000
0
M M M M
hex
M G G M M
0...3
99
0,00
...32
0,00
G G
90,0
s
6000
M M
0...3
2000
0
0...3
2000
0...4
0
0...1
5090 10
0
100
P–0
57
P–0
58
P–0
59
0...3
99
% % %
P–0
60
P–0
61
1.10
1.10
1.10
1.10
1.10
4.4
4.5
4.5
2.1
4.4
M M
0...3
9910
0
0...3
99%
0...7
000
M M
V
1.10
1.10
2.2.
3
4.6
100
A/V
s
P–0
37F
recu
enci
a de
pul
saci
ón d
el o
ndul
ador
act
ual
5.1.
13.
02,
8...7
,8–
kHz
P–0
63
P–0
64
P–0
65
Tem
pera
tura
máx
ima
del m
otor
(K
TY
84)
Tem
pera
tura
fija
Tem
poriz
ació
n al
arm
a te
mpe
ratu
ra e
n m
otor
2.2.
3.3.
00
3.00
3.00
0...1
70
0...1
70
0...6
00
150
30 240
grad
. C
grad
. C s
M
2.2.
3.
2.2.
3.
Valo
res
aju
stad
os
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.A
pt.
Des
ign
ació
nN
o. P
dec
r/m
in
r/m
in
r/m
in
r/m
in
dec
r/m
in
Gan
anci
a P
reg
ulad
or v
eloc
idad
Gan
anci
a P
reg
ulad
or d
e ca
mpo
Tie
mpo
acc
ión
inte
gral
reg
ulad
or n
Tie
mpo
acc
ión
inte
gral
reg
ulad
or c
ampo
Lim
itaci
ón d
e ve
loci
dad
Vel
ocid
ad e
stac
iona
ria m
ínim
a
Prim
er lí
mite
de
par
Seg
undo
lím
ite d
e pa
r
Tie
mpo
ace
lera
ción
g. r
ampa
s 2
Tie
mpo
dec
eler
ació
n g.
ram
pas
2
Vel
ocid
ad d
e co
nmut
ació
n de
M
Pro
tecc
ión
escr
itura
Car
ga d
e pa
rám
etro
s en
FE
PR
OM
Ban
da m
uert
a, v
eloc
idad
infe
rior
Sel
ecci
ón d
e m
otor
Pal
abra
de
man
do
Mdx
para
señ
aliz
ació
n ”M
d<
Mdx
”
d1a
Md2
Ban
da m
uert
a, v
eloc
idad
sup
erio
r
Con
sign
a de
inte
nsid
ad e
n la
zo a
bier
to
Lim
itaci
ón d
e in
tens
idad
Tens
ión
en c
ircui
to in
term
edio
fija
Par
ace
lera
dor
en la
zo a
bier
to
Lim
itaci
ón d
e po
tenc
ia
Módulos de motor asíncrono (AM) 10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-113 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Dim
.1
23
45
67
8
M
0...F
1...2
1
1...2
1
1...2
1
1...2
1
1...2
1
1...2
1
1...2
1
0...F
FF
F
1...1
3
0...7
1...2
1
0 0 0 0 1 7 3 17 18 19 9 10 11 3 0 0 –
P–0
77
P–0
78
P–0
79
P–0
80
P–0
81
P–0
82
P–0
83
P–0
84
P–0
85
P–0
86
P–0
87
P–0
88
P–0
89
P–0
96
P–0
97
(P–1
00)
1...2
1
0...1
0,00
...99
,99
000D
–
0...F
FF
FP
–072
10D
2
0...F
P–0
730
–127
...12
7P
–074
0
0...F
FF
FP
–076
1110
P–0
90
P–0
95
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
5.1.
4
5.1.
4
5.1.
4
5.1.
4
5.1.
4
3.3.
4
3.3.
4
5.1.
4
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
3.2.
2
1.3
2.1
2.1
2.1
2.2.
2
2.2.
1
–127
...12
7
–127
...12
7
–127
...12
7
–(P
–101
)–3
2000
...32
000
1.10
5.1.
1
–(P
–099
)
P–0
66
P–0
670.
..F
0...F
FF
F
0...F
P–0
68
P–0
69
0...F
FF
F11
B6
0
11B
8
0
1.10
1.10
1.10
1.10
3.3.
4
3.3.
4
3.3.
4
3,3.
4
Dire
cció
n C
DA
1
Dire
cció
n C
DA
2
Fac
tor
de d
ecal
aje
CD
A 1
Fac
tor
de d
ecal
aje
CD
A 2
hex
hex
hex
hex
Valo
res
aju
stad
os
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.A
pt.
Des
ign
ació
nN
o. P
Fac
tor
de d
ecal
aje
CD
A 3
Offs
et C
DA
1
Offs
et C
DA
2
Offs
et C
DA
3
Dire
cció
n C
DA
4
Fac
tor
de d
ecal
aje
CD
A 4
Offs
et C
DA
4
Dire
cció
n C
DA
3
Asi
gnac
ión
born
e E
1
Asi
gnac
ión
born
e E
2
Asi
gnac
ión
born
e E
3
Asi
gnac
ión
born
e E
4
Asi
gnac
ión
born
e E
5
Pal
abra
de
man
do
Cód
igo
de p
arte
de
pote
ncia
Asi
gnac
ión
born
e E
6
Asi
gnac
ión
born
e E
7
Asi
gnac
ión
born
e E
8
Asi
gnac
ión
born
e E
9
Cód
igo
de m
otor
Ver
sión
firm
war
e
Vis
ualiz
ació
n de
est
ado
Inic
ializ
ació
n
Con
sign
a de
vel
ocid
ad
hex
dec
dec
hex
hex
incr
.
hex
incr
.
incr
.
incr
.
dec
dec
dec
dec
dec
dec
dec
hex
dec
dec
hex
dec
Car
act.
espe
cial
es
r/m
in
Módulos de motor asíncrono (AM)10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-114 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Ap
t.fi
rm-
war
eD
im.
12
34
56
78
Vers
.
P–1
152
0...2
55
P–1
162
M0.
..300
1.10
1.10
4.2
4.2
M
1500
P–1
190
–320
00 ..
. 320
00
P–1
520
dec
P–1
540
r/m
in
P–1
550
r/m
in
P–1
561,
000
0,00
2...6
0,00
0s
1,00
00,
002.
..60,
000
s
P–1
590,
00,
0...6
535,
5gm
P–1
600,
000,
00...
650,
00kW
P–1
610,
00A
379,
00V
r/m
in
P–1
6450
,00,
0...1
200,
0H
z
P–1
660,
000,
00...
A
P–1
670,
000
0,00
0...6
5,00
0
P–1
680,
000
0...6
5000
P–1
57
P–1
62
P–1
63
2
2.00
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
3.1
1.3
2.2.
3
2.2.
3
2.2.
3
2.2.
3
4.1
2.1
2.1
2.1
2.1
2.1
4.2
2.1
2.1
0...1
P–1
530
dec
1.10
1.3
–1...
1
–320
00...
3200
0
–320
00...
3200
0
0,00
00,
000.
..65,
000
mH
P–1
581.
102.
1
MM MM
0,00
...65
0,00
MM M
0,00
...65
0,00
Ine
nn L
T
MM MM0,
000.
..65,
000
0,00
0P
–169
1.10
2.1
0,00
0...6
5,00
0
P–1
511.
3
F
00.
..7F
FF
hex
1.10
P–1
31
P–1
32
(P–1
33)
Núm
ero
raya
s vi
gila
ncia
vel
ocid
ad B
ER
O
Um
bral
des
cone
xión
vig
il. v
eloc
idad
BE
RO
2.2.
3
2.2.
3
5.1.
1V
eloc
idad
rea
l med
ida
por
BE
RO
3.00
3.00
3.00
0...1
0
0...6
5535
0...6
5535
0
6553
5
P–1
130.
..9
P–1
14
11.
10
1.10
3.1
3.1
F–3
2000
...32
000
–320
00...
3200
0
0 0P
–114
1.10
3.1
(P–1
10)
Tem
pera
tura
en
mot
or5.
1.1
3.00
0...1
70gr
ad. C
–(P
–102
)–3
2000
...32
000
1.10
5.1.
1
MM
r/m
in
dec
r/m
in
r/m
in
Vel
ocid
ad r
eal
Sel
ecci
ón c
anal
con
sign
a ve
loci
dad
Con
sign
as fi
jas
1 a
7
Con
sign
a po
tenc
ióm
etro
mot
oriz
ado
Valo
res
aju
stad
os
Pre
fija
do
Mar
gen
de
aju
ste
Des
ign
ació
nN
o. P
Gan
. P r
eg. I
, mar
gen
velo
cida
d ba
se
Gan
. P r
eg. I
, deb
il. c
ampo
Con
sign
as fi
jas
8 a
15
Car
ga d
e pa
rám
etro
s en
FE
PR
OM
Con
sign
a de
osc
ilaci
ón 2
Inte
rval
o de
osc
ilaci
ón 1
Inte
rval
o de
osc
ilaci
ón 2
Mom
ento
de
iner
cia
de m
otor
y c
arga
Pot
enci
a no
min
al m
otor
Con
sign
a de
osc
ilaci
ón 1
Cal
cula
r da
tos
mot
or/d
atos
reg
ulad
ores
Indu
ctan
cia
de la
bob
ina
serie
Pro
tecc
ión
escr
itura
Inte
nsid
ad n
omin
al m
otor
Tens
ión
nom
inal
mot
or
Vel
ocid
ad n
omin
al m
otor
Fre
cuen
cia
nom
inal
mot
or
Inte
nsid
ad e
n va
cío
mot
or
Res
iste
ncia
est
ator
frío
Res
iste
ncia
rot
or fr
ío
Rea
ctan
cia
disp
ersa
est
ator
dec
r/m
in
dec
r/m
in
r/m
in
Módulos de motor asíncrono (AM) 10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-115 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
00,
00...
10,0
0
firm
-w
are
Dim
.1
23
45
67
8Ve
rs.
P–1
790
0...3
1110
0...F
FF
F
– –
P–1
8511
100.
..FF
FF
P–1
860
0...F
FF
F
P–1
870,
000,
00...
10,0
0s
0,00
0,00
...10
,00
s
P–1
891
0...7
FF
F
P–1
9011
100.
..FF
FF
P–1
910
0...F
FF
F
00,
00...
10,0
0s s
P–1
941
0...7
FF
F
P–1
950
M
P–1
96
50,0
M
P–1
9810
,0M
0,0.
..255
,9
100
M1.
..150
%
P–1
81
(P–1
82)
(P–1
83)
P–1
88
P–1
92
P–1
93
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
5.1.
5
5.1.
5
5.1.
5
5.1.
5
3.3.
3
3.3.
3
3.3.
3
3.3.
3
3.3.
3
3.3.
3
3.3.
3
3.3.
3
4.1
4.1
4.1
4.1
3.3.
3
3.3.
3
0...F
FF
F
0...F
FF
F
0...3
2000
0...3
2000
P–1
97M
0,0.
..255
,91.
104.
1
00.
..1D
ezP
–203
1.10
4.1
M
0
P–1
751,
00,
0...5
00,0
min
P–1
7632
767
0...6
5535
P–1
780,
800
0,00
0...1
,000
–
1.10
1.10
1.10
2.2.
3
2.1
2.1
MM M
Hex
2.00
5.13
0 ...
FF
FF
–(P
–200
)
P–1
99
MM M
0,00
0,00
...65
0,00
0...3
2000
0,00
0
P–1
73
P–1
74
300
1500
1500
P–1
72
P–1
71
P–1
701.
10
1.10
1.10
1.10
1.10
2.1
2.1
2.1
2.1
2.1
0,00
0...6
5,00
0
MM0.
..320
00
0...3
2000
Rea
ctan
cia
cam
po p
rinci
pal
Vel
ocid
ad c
onm
utac
ión
lazo
cer
rado
/abi
erto
Rea
ctan
cia
disp
ersa
rot
or
Vel
ocid
ad tr
ansi
ción
deb
il. c
ampo
Vel
ocid
ad m
áxim
a m
otor
r/m
in
r/m
in
r/m
in
r/m
in
hex
hex
hex
hex
hex
hex
hex
hex
hex
hex
r/m
in
r/m
in
dec
dec
Sel
ecci
ón m
emor
ia m
ín/m
áx
Dire
cció
n pa
ra m
emor
ia m
ín/m
áx
Val
or m
ínim
o m
emor
ia m
ín/m
áx
Val
or m
áxim
o m
emor
ia m
ín/m
áx
Um
bral
par
a vi
gila
ncia
1
Dire
cció
n pa
ra v
igila
ncia
1
Con
stan
te d
e tie
mpo
térm
ica
mot
or
Vel
ocid
ad a
ctua
ción
par
des
enga
nche
Fac
tor
de p
oten
cia
cos
Ret
ardo
a la
exc
itaci
ón v
igila
ncia
1
Ret
ardo
a la
des
exci
taci
ón v
igila
ncia
1
His
tére
sis
vigi
lanc
ia 1
Dire
cció
n pa
ra v
igila
ncia
2
Um
bral
par
a vi
gila
ncia
2
Ret
ardo
a la
exc
itaci
ón v
igila
ncia
2
Ret
ardo
a la
des
exci
taci
ón v
igila
ncia
2
His
tére
sis
vigi
lanc
ia 2
Vel
ocid
ad d
e ad
apta
ción
infe
rior
Vel
ocid
ad d
e ad
apta
ción
sup
erio
r
Gan
. P v
eloc
idad
de
adap
taci
ón s
uper
ior
Gan
. P fa
ctor
red
ucci
ón
Gan
. P v
eloc
idad
de
adap
taci
ón in
ferio
r
Sel
ecci
ón a
dapt
ació
n re
gula
dor
de v
eloc
idad
Sum
a de
ver
ifica
ción
par
ámet
ros
No
. PD
esig
nac
ión
Ap
t.M
arg
en d
e aj
ust
eP
refi
jad
oVa
lore
s aj
ust
ado
s
Módulos de motor asíncrono (AM)10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-116 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
23
45
67
8
P–2
4120
1...2
0
P–2
423
1...2
0
11.
..20
41.
..20
51.
..20
P–2
462
1...2
0
P–2
470
0...F
FF
F
P–2
490.
..FF
FF
00.
..FF
FF
P–2
43
P–2
44
P–2
45
P–2
50
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
1.10
3.3.
2
3.3.
2
3.3.
2
3.3.
2
3.3.
2
3.3.
2
3.3.
2
2.4
2.4
0
0...1
P–2
070.
..C
P–2
08
P–2
090
0...F
FF
F
P–2
100
0...F
FF
F
0 0
0...F
FF
F0
P–2
061.
10
1.10
1.10
1.10
1.10
5.1.
6
5.1.
6
5.1.
6
5.1.
6
5.1.
6
P–2
040
0...7
1.10
4
00.
..1P
–205
1.10
4
Dim
.1
00.
..1
00.
..15
00.
..15
P–2
170
0...F
FF
F
P–2
187F
FF
0...F
FF
F
P–2
14
P–2
15
P–2
16
1.10
1.10
1.10
1.10
1.10
5.1.
6
5.1.
6
5.1.
6
5.1.
6
5.1.
6
P–2
1211
100.
..FF
FF
P–2
1310
D2
0...F
FF
F
1.10
1.10
5.1.
6
5.1.
6
P–2
110
0...F
FF
F1.
105.
1.6
00
... 1
5P
–219
2.00
4.1
M
(P–2
54)
– –(P
–255
)
1.10
1.10
1.10
2.4
5.1.
2
5.1.
2
(P–2
51)
0...F
FF
F
0...F
FF
F
0...F
FF
F
Valo
res
aju
stad
os
kgm de
c
dec
dec
dec
dec
dec
hex
hex
hex
hex
hex
hex
hex
hex
dec
dec
hex
dec
dec
hex
hex
hex
hex
hex
hex
hex2
Pre
fija
do
Mar
gen
de
aju
ste
firm
-w
are
Vers
.A
pt.
No
. P
Señ
aliz
ació
n pr
ogra
mab
le 1
Señ
aliz
ació
n pr
ogra
mab
le 2
Señ
aliz
ació
n pr
ogra
mab
le 3
Señ
aliz
ació
n pr
ogra
mab
le 4
Señ
aliz
ació
n pr
ogra
mab
le 5
Pal
abra
de
man
do S
eñal
izac
ione
s
Seg
men
to c
élul
a de
mem
oria
mon
itor
Dire
cció
n cé
lula
de
mem
oria
mon
itor
Señ
aliz
ació
n pr
ogra
mab
le 6
Sel
ecci
ón r
egis
trad
or d
e tr
ansi
torio
s
Aju
ste
regi
stra
dor
de tr
ansi
torio
s
Dire
cció
n pa
ra c
ondi
ción
de
arra
nque
Um
bral
par
a co
ndic
ión
de a
rran
que
Dire
cció
n pa
ra c
ondi
ción
de
para
da
Aut
oopt
imac
ión,
sel
ecci
ón d
e fu
nció
n
Lanz
amie
nto
auto
optim
ació
n
Des
ign
ació
n
Lanz
amie
nto
de la
sal
ida
del r
egis
tro
Fac
tor
de d
ecal
aje
seña
l 1
Fac
tor
de d
ecal
aje
seña
l 2
Señ
al d
e di
spar
o 2
Señ
al d
e di
spar
o 1
Dire
cció
n se
ñal 1
Dire
cció
n se
ñal 2
Um
bral
par
a co
ndic
ión
de p
arad
a
Mom
ento
de
iner
cia
supl
emen
tario
Indi
caci
ón v
alor
cél
ula
de m
emor
ia m
onito
r
Indi
caci
ón d
e fu
ncio
nes
activ
as 1
Indi
caci
ón d
e fu
ncio
nes
activ
as 2
Módulos de motor asíncrono (AM) 10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-117 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
P–2
19kg
m5
P–0
95
/
No
.
P–1
53 =
+1
P–1
53 =
–1
No
.
No
.
No
.
P–2
04 =
P–2
04 =
P–0
96P
–056
P–0
99
P–1
60P
–161
P–1
62P
–163
P–1
64P
–174
P–1
78
P–1
66P
–167
P–1
68P
–169
P–1
70P
–171
P–1
72P
–173
P–1
76
P–0
31P
–032
P–0
34P
–035
P–1
15P
–116
P–1
59
0 140
//
A
kW A V r/m
inH
zr/
min
dec
A dec
ms
100
A/V
sm
sde
cde
cgm
2
3 6 4 511
2p =
(P–2
51)
P–2
50 =
P
–250
=
Valo
rN
o.
Un
idad
(P–2
51)
P–0
18P
–036
P–1
58
hex
hex
22 ms
hex
mH
2
8 8 7 7
Fec
ha:
Ob
serv
ació
n
Ob
serv
ació
n
Ob
serv
ació
n
Ob
serv
ació
n
Rot
or d
e de
spla
zam
to. d
e co
rrie
nte
s
í/no
Con
mut
ació
n co
n/si
n bl
oque
o im
p.
Pue
nte
en la
caj
a de
bor
nes
Un
idad
Un
idad
r/m
inr/
min
r/m
in
Valo
r re
op
tim
izad
o
Valo
r re
op
tim
izad
o
Valo
r au
too
pti
miz
ado
Valo
r au
too
pti
miz
ado
Máq
uin
a:
Mód
ulo
AM
:T
ipo
de m
otor
:Ju
ego
de p
arám
etro
s de
l mot
or
Un
idad
Valo
r
cara
cter
ísti
cas
Dat
os
pla
ca d
e
Valo
r ca
lcu
lad
o
Valo
r ca
lcu
lad
o
Clie
nte
:
Valo
res
de
inic
ializ
ació
n y
tip
o d
e m
oto
rP
arám
etro
s
Cód
igo
de la
par
te d
e po
tenc
iaC
ódig
o de
l mot
orS
elec
ción
del
mot
orV
ersi
ón fi
rmw
are
Dat
os
del
mo
tor
Par
ámet
ros
Pot
enci
a no
min
al d
el m
otor
Inte
nsid
ad n
omin
al d
el m
otor
Tens
ión
nom
inal
del
mot
orV
eloc
idad
nom
inal
del
mot
orF
recu
enci
a no
min
al d
el m
otor
Vel
ocid
ad m
áxim
a de
l mot
orF
acto
r de
pot
enci
a co
sT
ipo
de c
onex
ión
Dat
os
del
esq
uem
a eq
uiv
alen
teP
arám
etro
sIn
tens
idad
en
vací
o de
l mot
orR
esis
tenc
ia d
el e
stat
or fr
íoR
esis
tenc
ia d
el r
otor
frío
Rea
ctan
cia
disp
ersa
est
ator
Rea
ctan
cia
disp
ersa
rot
orR
eact
anci
a ca
mpo
prin
cipa
lV
eloc
idad
de
conm
utac
ión
lazo
cer
rado
/abi
erto
Vel
ocid
ad d
e tr
ansi
ción
deb
ilita
mie
nto
cam
poV
eloc
idad
act
uaci
ón p
ar d
esen
ganc
he
Dat
os
de
reg
ula
do
res
Par
ámet
ros
Gan
anci
a P
reg
ulad
or d
e ve
loci
dad
Tie
mpo
acc
ión
inte
gral
reg
ulad
or d
e ve
loci
dad
Gan
anci
a P
reg
ulad
or d
e ca
mpo
Tie
mpo
acc
ión
inte
gral
reg
ulad
or d
e ca
mpo
Gan
. P r
egul
ador
I, m
arge
n ve
loci
dad
base
Gan
. P r
egul
ador
I, d
ebili
tam
ient
o ca
mpo
Mom
ento
de
iner
cia,
mot
or y
car
gaM
omen
to d
e in
erci
a su
plem
enta
rioO
ffset
pot
enci
a ac
tiva
Offs
et p
oten
cia
reac
tiva
Aju
stes
esp
ecia
les
Par
ámet
ros
Red
onde
o in
icia
l ram
paF
recu
enci
a pu
lsac
ión
conv
ertid
orIn
duct
anci
a de
la b
obin
a se
rie
Módulos de motor asíncrono (AM)10.00

6.6 Parámetros de ajuste y control (lista de parámetros)
AM
10.00
AM/6-118 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Módulos de motor asíncrono (AM) 10.00
Espacio para sus notas

AM
10.00
AM/i-1 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Índice alfabético
AAplicaciones estándar, AM/1-4, AM/2-22
parámetros de ajuste, AM/2-23
BBanda muerta, AM/4-63Bornes de entrada, AM/3-40Bornes de salida, AM/3-43
CCDA, AM/3-48, AM/5-80Código de parte de potencia, AM/2-16Conexiones, AM/1-14
bornes de conexión, AM/6-105bornes de relé, AM/6-106esquema de conexión, AM/6-104
Conmutación de motores, AM/2-32Conmutación del juego de parámetros, AM/2-32Consigna fija, AM/3-38Convertidor
estado, AM/2-22reinicialización, AM/1-7
DDatos de ajuste, panorámica, AM/1-13Debilitamiento de campo, margen, AM/4-65Diagnóstico, AM/5-75Display, AM/2-22, AM/5-87
EElementos de mando y señalización, AM/1-9Escalón, AM/2-22
FFallo, AM/5-88
acuse, AM/5-87código, AM/5-88indicación, AM/5-87
Frecuencia de pulsación del convertidor, AM/4-57Función de registro de transitorios, AM/5-84
Función de relé, variable, AM/3-47Función monitor, AM/2-36Función relé, AM/2-22Funciones de bornes
asignación, AM/3-41cableadas, AM/3-40programables, AM/3-41
Funciones de reléscableadas, AM/3-43programables, AM/3-44
palabra de mando, AM/3-46señalizaciones parametrizables, AM/3-46
GGenerador de rampas, AM/4-54
HHembrillas de medida, AM/5-80
IImagen de la temperatura del motor, AM/2-25Indicación de estado
entradas binarias, AM/5-76funciones activas 1, AM/5-77funciones activas 2, AM/5-78
Indicación en display de valores medidos,AM/5-75
Inicialización, AM/2-16Intensidad en vacío, AM/4-59, AM/4-70
del motor, AM/4-70Interfase de consigna de velocidad, AM/3-37
selección de canal, AM/3-37Interfase RS232C, AM/1-7, AM/1-14Interfases, AM/6-106Interfases de consigna de velocidad, prioridad de
consignas, AM/3-39
JJuego datos motor, AM/2-17
LLimitaciones, AM/4-61Límite de par, AM/2-24Lista de parámetros, AM/6-108
Índice alfabéticoMódulos de motor asíncrono (AM)

AM
10.00
AM/i-2 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
MMando intensidad/frecuencia, AM/5-86Margen con debilitamiento de campo, AM/2-21Margen de velocidad, AM/2-21Margen en lazo abierto, AM/4-60Memoria de valores mínimos/máximos, AM/5-83Modo, AM/2-22Momento de inercia, AM/2-17, AM/4-56, AM/6-98
total, AM/4-56
OOperación con motores en paralelo, AM/2-27Operación con varios motores, AM/2-27Optimización
manual, AM/4-64margen en lazo abierto, AM/4-60
Origen consigna, AM/2-22Oscilación, de cabezal para engrane, AM/2-26
PParada sin giro en sentido opuesto, AM/4-63Parámetro
atributos, AM/1-5de diagnóstico, AM/5-79de mando, AM/1-10margen de ajuste, AM/1-5, AM/1-6número, AM/1-9número de subparámetro, AM/1-9protección en escritura, AM/1-6representación, AM/1-5valor, AM/1-9
Parámetros de ajuste, AM/6-108Parámetros de visualización, AM/2-22Paro sin giro en sentido opuesto, AM/3-40Placa de características, AM/1-14Potenciómetro motorizado, AM/3-37Prioridad de consignas, AM/3-39Puesta en marcha
consejos, AM/1-7nueva, AM/6-92posibilidades, AM/1-7
RReactancia campo principal, AM/2-18, AM/4-71Reducción de potencia, AM/4-57Regulador de campo, AM/4-59, AM/4-69Regulador de intensidad, AM/4-57Regulador de velocidad
adaptacion, AM/4-55ciclo (cadencia), AM/4-56ganancia, AM/4-55tiempo de acción integral, AM/4-55
Resistencia, del rotor, AM/4-73Resistencia rotor motor frió, AM/2-17
SSalidas analógicas, AM/3-48
conexión para indicaciones analógicas,AM/3-50
parametrización CDA 1, CDA 2, AM/3-49Series de máquinas, AM/1-8Sustitución
de componentes, AM/1-8del módulo, AM/1-8
Sustitución del firmware, AM/1-7
TTensión en circuito intermedio, fija, AM/2-16
VValor de ajuste de velocidad, AM/2-23Variable en RAM, AM/6-107
direcciones, AM/6-107Velocidad
estacionaria mínima, AM/4-62márgenes, AM/4-62
Velocidad de conmutación, AM/2-18, AM/2-21Versión del firmware, AM/2-23Vigilancia de temperatura en motor, AM/2-24Vigilancia de velocidad máxima, AM/2-23Visualización de estado, AM/2-22
Índice alfabéticoMódulos de motor asíncrono (AM)

ES
ES–i Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Repuestos (ES)
1 Componentes ES/1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Accesorios ES/2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Conectores ES/2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Cables ES/2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Fusibles ES/2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Abrazaderas de contacto para pantallas de cable ES/2-7. . . . . . . . . . . . . . . .

ES
10.00
ES–ii Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Espacio para sus notas

ES
10.00
ES/1-3 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Componentes
Todos los componentes (motores, módulos, tarjetas de regulación, cables, co-nectores, etc.) suministrables de acuerdo a los catálogos NC60 y NC Z puedenpedirse en calidad de repuestos.
Denominación para el pedido de las documentaciones:
SINUMERIK 840D/840Di/810D/802S, C, DFormulario para pedidoCatálogo NC 60Referencia: E86060–K4460–A101–A8Referencia: E86060–K4460–A101–A8–7600 (inglés)
SINUMERIK, SIMODRIVE & SIMOVERT MASTERDRIVESTécnica de conexiones & componentes de sistemaCatálogo NC ZReferencia: E86060–K4490–A001–A7Referencia: E86060–K4490–A001–A7–7600 (inglés)
Repuestos (ES)1 Componentes
10.00
1
ES
10.00
ES/1-4 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Repuestos (ES)1 Componentes
Espacio para sus notas

ES
10.00
ES/2-5 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Accesorios
2.1 Conectores
En la superficie de conexión de los distintos módulos están disponibles lasseñales externas en conectores con polos distintos. La posición y el número depolos de los conectores están representados en las referencias rápidas paralos módulos en el Apéndice A.
De necesitarse es posible pedir en calidad de repuestos los conectores relacio-nados en la tabla 2-1 (interfases del cliente).
Tabla 2-1 Conectores
Nº polos/tipo Paso Ref./Nº pedido
2 5,08 6SY9433
3 5,08 6SY9906
4 5,08 6SY9432
6 5,08 6SY9896
7 5,08 6SY9898
8 5,08 6SY9897
8 1) 7,60 6SY9900
12 5,08 6SY9901
13 5,08 6SY9903
15 5,08 6SY9902
Conector potenciaconexión motor
3 polos 6SY9659
Conector potenciaconexión resistencia
pulsante3 polos 6SY9663
Conector de Bero, sonda de temperaturaEl ventilador centrífugo externo se conecta mediante un conector que se com-pone de las piezas de la marca AMP siguientes:
Carcasa Mate-N-Lok 350766–1
Contactos engastables 926884–1
1) Sólo para conector X181 en módulos de alimentación de red
Interfaz del cliente
Repuestos (ES)10.00
2
2.1 Conectores

ES
10.00
ES/2-6 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.2 Cables
Línea de bus interno para la adaptación de la configuración de módulos:
50 mm referencia 6FC5247–0AA23–0AA0
400 mm referencia 6SN1161–1AA00–0BA0
Indicación
Por razones constructivas, las líneas de bus interno de >50 mm sólo se pue-den utilizar con una línea de bus interno con la longitud de 400 mm.
2.3 Fusibles
Propuesta para fusibles de línea, v. Instrucciones para proyecto.
SIMODRIVE 611-A/611-DInstrucciones de proyecto convertidor (edición 08.98)Convertidores a transistores para accionamientos trifásicosde avance y de cabezalReferencia: 6SN1 197–0AA00–0DP4
Bibliografía
Repuestos (ES) 10.002.4 Abrazaderas de contacto para pantallas de cable

ES
10.00
ES/2-7 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
2.4 Abrazaderas de contacto para pantallas de cable
Chapa de apan-tallamiento
Abrazaderaspara pantalla
Barra de conexión de pantallas Referencia6SN1162–0FA00–0AA0
X
X
Figura 2-1 Abrazaderas de conexión para pantallas de cable
Las abrazaderas para mangueras están especificadas conforme al diámetroexterior de la pantalla de cable. A continuación aparece una lista de posiblesabrazaderas para mangueras para la conexión de pantallas de cable.
Tabla 2-2 Abrazadera para mangueras para pantallas
Sección del conductor Abrazadera para mangueras para pantallas
4 x 1,5 mm2
4 x 1,5 mm2 + 2 x 1 mm2Abrazadera para mangueras DIN 3017–AL–8–16 W1–1
4 x 2,5 mm2 + 2 x 1 mm2 Abrazadera para mangueras DIN 3017–AL–8–16 W1–1
4 x 4 mm2
4 x 4 mm2 + 2 x 1 mm2Abrazadera para mangueras DIN 3017–AL–12–20W1–1
4 x 6 mm2
4 x 6 mm2 + 2 x 1 mm2Abrazadera para mangueras DIN 3017–AL–16–25W1–1
4 x 10 mm2
4 x 10 mm2 + 2 x 1 mm2Abrazadera para mangueras DIN 3017–AL–16–25W1–1
4 x 16 mm2
4 x 16 mm2 + 2 x 1 mm2Abrazadera para mangueras DIN 3017–AL–16–25W1–1
4 x 25 mm2 + 2 x 1,5 mm2 Abrazadera para mangueras DIN 3017–AS–25–40W1–1
4 x 35 mm2 + 2 x 1,5 mm2 Abrazadera para mangueras DIN 3017–AS–25–40W1–1
4 x 50 mm2 + 2 x 1,5 mm2 Abrazadera para mangueras DIN 3017–AS–32–50W1–1
Repuestos (ES)10.002.4 Abrazaderas de contacto para pantallas de cable

ES
10.00
ES/2-8 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Repuestos (ES) 10.002.4 Abrazaderas de contacto para pantallas de cable
Espacio para sus notas

Ured=480V +6% / –10%
Regulación de corriente debloque
Alimentación reguladabloqueada
Tensióncircuito intermedio = 625 V1)
Mensaje de errorRealimentación de redOFF1)
Tensióncircuito intermedio = 600 V1)
Realimentación posible1)
Mensaje “Listo para el servicio”
Alimentación regulada libre2)
Referencia abreviadapara SIMODRIVE 611sistema analógico– Módulo de avance– Módulo de alimentación
Interruptor DIL S1 (módulo de alimentación):ON: OFF:
1
234 véase S1.1
1) sólo en el módulo E/R
0,5
2
34
5
6
789
Interruptor DIL 10 uds. S2: = ON= OFF
1 Inversión del sentido de giro
Límite de corriente Imáx/límite en %
61 50 46 41 39 36 34 30 29 26 24 23
1 2 2,5 4 4,55,5 6 6,57,5 8 9,511
Corriente constante posible: Icons = 25 A
Corriente posible de corta duración: límite = 50 A
Contactos: 2 = ON, 3 = ON 61 %
Límite de corriente ajustado: Imáx = 30,5 A
11,5
Ganancia del regulador de corriente Kp(I)
10OFF: Modo con regulación de velocidad
Ejemplo: Módulo de avance 25 A/50 A
Interruptor DIL (módulo de avance):
Siemens AG 2000 All Rights Reserved Edición 10.00
Documentación correspondiente:
Instrucciones para proyecto 6 SN1197–0AA00–0EP
Instrucciones de puesta en marcha 6 SN1197–0AA60–0EP
Elementos de ajuste VSA y NE Módulo de alimentación (NE)
Relé Listo para el servicio
Mensaje“Listopara elservicio”
Mensajede error
Excitación en ausencia defallos y en presencia de se-ñales de liberación 63 y 64
Excitación en ausencia defallos
74
73.273.1
72
Relais de señalización agrupada paravigilancia I2t y/o sobretemperatura demotor
+24 V+24 V
Desbloqueo impulsos
Desbloqueo accionamientoMasa de referencia para todos los des-bloqueos (no conectada con masa KL15)
5.35.25.1
63
9
6419
9
P 24P 15N15N24
+24 V/50 mA
–24 V/50 mA–15 V/10 mA+15 V/10 mA
Masa de referencia general
RESET por conexión con KL15(cambio de flanco High Low)
74544101515R
+24 VModo de preparación en estado nopuenteadoArrancar
9112
48111
113Contactor de red interno cerrado
Contacto de señalización bloqueo dearranque (parada de servicio segura)
NS1NS2
Contacto de bobinacontactor de red interno
AS1AS2
Avisos de error:
Nivel de tensión15 V perturbado
Falta desbloqueo ex-terno KL63 o KL64
Error de red
rojo
verde
rojo
rojo
ama-rillo
rojo
Nivel de tensión5 V perturbado
Aparato listo, circuitointermedio precargado
Sobretensión del cir-cuito intermedio
Interruptor DIL S1
100 85 68
ON: modo con regulación de corriente
Interfaz estándar:consigna por KL56 y KL14
Interfaz confort:consigna por KL24 y KL20
56Regulación de corriente
sinusoidal
213

Consigna corriente maestro/esclavo
Conductor de señal del motor
TacoCaptador de po-sición de rotorResistencia PTC
Consigna de velocidad de gironcons (entrada diferencial 10 V)
Relé de aviso bloqueo dearranque
Desbloqueo impulsos+24 V
+24 VLiberación del regulador
Selección consigna fija 11)
Selección consigna fija 2)
Consigna adicional velocidad giro/corriente (entrada diferencial 10V)Desplazar hasta tope mecánico
N15 –15 V/10 mA
Interfaz confort: Interfaz estándar:
56
AS1
663
Avisos de error en módulo VS con interfaz confort:
Módulo de ajuste no conectado
Falta desbloqueo KL663 y/o KL65
Avisos de error:
corresponde al error:
corresponde al error:
Módulo listo para el servicio
Vigilancia I2t, temperatura disipador
Vigilancia captador de posición de rotor
Sobretemperatura motor
Vigilancia taco
Regulador de la velocidad de giro a tope e I2t
Regulador de la velocidad de giro a tope Ireal=Icons
Regulador de la velocidad de giro a tope e Ireal = 0
Bornes de medición en módulo VS con interfaz confort:
Bloqueo integrador
Valor real de corriente Ireal
Relé de aviso:
Regulador de la velocidad degiro a tope
Vigilancia I2t
Sobretemperatura motor
Vigilancia taco y capta-dor de posición de rotor
Relé “Listo”(o relé de señalización de fallos)
14
AS2
9659
222320
2496446
25816
289288
290291293294296297299672673674
De-riva
máx.
mín.
máx.
T
Kp
TN
AD
Compensación de la deriva:
Conexión en cortocircuito de KL56 y KL14: El motor no debe girar
Ajuste del taco:Usual: Con ncons = 9 V en KL56/14, el motor alcanza ncons
Ganancia proporcional Kp y tiempo de acción integral TN:
El giro en sentido horario aumenta la dinámica delregulador. Optimización:
nreal 20...40 %
aprox. 0,05 ncons
tan = 5...10 ms
Mejora la dinámica con pequeñas velocidadesde giro. Activación por R34
Adaptación TN:
t
nreal ncons.
Ireal Icons
Velocidad de giroreal 10 V ncons del motor
Intensidad real: 10 V Imáx(v. interruptor DIL)
Masa de referencia parabornes de medición
Consigna de velocidad:de KL56 y KL14
Consigna de corriente:10 V Imáx(véase interruptor DIL)
Alimentación de una consignade velocidad de giro adicional
TW
X R
NZ
M
Bornes de medición:
nreal
IconsIreal
Masa
W T
M
X
Módulo de ajuste
1) opcional para la conmutación modo con regulación de corriente
Módulo de avance (VSA) con opción HS
10261
75162
110
108115114216
127126
TH 1:10
Eje Cnreal
Preal/Ireal
Ireal > Ix
nreal <nmín
nreal < nx
nreal=ncons
Deriva
KpTNnoff
Módulo opcional Funciones de cabezal
AS1AS2663
9
5614659
9
22
Taco
Posición del rotor
Resistencia PTC
Línea deseñalCaptadordel motor
214
DerivaTacoKpTNAD
Desbloqueo impulsos
+24 V
Contacto de señalización bloqueo de arranque
Valor prescrito de velocidadde giro ncons
Liberación del regulador
Selección con regulación decorriente
+24 V
+24 V
Subtensión 5 voltios
5614659
22
DerivaTacoKpTNAD
2)
2)
2)
2) sólo en variante de 2 ejes
9
2)
X311 X311 X313

Vigilancia 300 ms KL65Modo maestro/esclavoMensaje de error
Bloquear integrador regula-dor de la velocidad de giro
Bloquear integrador reguladorde corriente 2)
Referencia abreviadapara SIMODRIVE 611 sistema analógico– Módulo de avance regulación a resolver
Siemens AG 2000 All Rights Reserved Edición 10.00
Documentación correspondiente:
Instrucciones para proyecto 6SN1197–0AA00–0EP
Instrucciones de puesta en marcha 6SN1197–0AA60–0EP
Regulador de corrienteEje 1: Interruptor DIL S3Eje 2: Interruptor DIL S6
Normalización de valor real de corriente componente –/– [%]
1) con giro en sentido horario
1
3+7
4+8
5+9
6+10
2 3 4 5 6 7,5 8,5 9,5 14,5
Amplificación de regulador de corriente eje Q/D
= OFF
= ON
Elementos de ajuste regulación a resolver
Lógica de vigilancia
1+2
100 70
Componente –/
13,512,511,5 1610,5
Limitación de consigna de corriente [%]Eje 1: Interruptor DIL S12 / contactos 1–4Eje 2: Interruptor DIL S12 / contactos 5–8
100
1/5
2/6
3/7
4/8
75 55 45 25 20 5
Normalización valor real de velocidad de giro [1/min]Eje 1: Interruptor DIL S4 / contactos 1–4Eje 2: Interruptor DIL S4 / contactos 5–8
1/5
2/6
3/7
4/8
2000 3000 3000 6000
Estas normalizaciones son válidas para el número depolos estándar de resolver 2p = 2.Normalizaciones para números de polos especiales2p = 4, 6, 8 bajo consulta.
2) sólo activo en caso de selección del borne 22
ON: OFF:1/3
2/456
7/8
Integrador regulador de lavelocidad de giro activo
Mensaje “Listo para el serv.”
Modo NormalVigilancia 1 s KL65
Integrador regulador de corriente activo 2)
Interfaz captador incremental angular
ON: OFF:CN
1024 impulsos/vuelta
Secuencia de fases A antesde B
CN
512 impulsos/vuelta
Secuencia de fases B antesde A 1)
Eje:1 Interruptor DIL S5 / contactos 1, 2, 5, 6, 7Eje 2: Interruptor DIL S5 / contactos 3, 4, 5, 6, 8
Procesamiento de posiciónEje 1: Interruptor DIL S1Eje 2: Interruptor DIL S2
1
2
2 4 6 8
Números de polos
3
4
2 4 6 8
Resolver
Decalaje de marca cero [mecánico]Eje 1: Interruptor DIL S1 / contacto 8
Interruptor DIL S11 / contactos 1–5Eje 2: Interruptor DIL S2 / contacto 8
Interruptor DIL S11 / contactos 6–10Decalaje total = siguiente ángulo de paso
S 1/2: 8
S 11: 1/6
2/7
3/8
0 5,625 11,25 22,25
4/9
5/10
45 90 180
2p =2p =
Contactos
Limitación de consigna de corriente
Normalización de valor real de velocidad de giro
Contactos
Ángulo de paso
Motor Contactos
Contactos
Contactos
Contactos
Contactos
Contactos
Contactos

Optimización regulador de velocidad de giro Función de bornes
Compensación de la deriva:
Conexión en cortocircuito de KL56 con KL14 y de KL24con KL20: El motor no debe girar
Ajuste del taco:
Usual: Con ncons = 9 V en KL56/14, el motor alcanza ncons
Ganancia proporcional Kp y tiempo de acción integral TN:
El giro en sentido horario aumenta la dinámica del regulador.Optimización:
Desbloqueo impulsos
Interfaz estándar regulación de resolver
DerivaTacoKpTN
Interfaz captador incre-mental angular eje 2(X392)
Captador de motoreje 2 (X312)
Interfaz captador in-cremental angulareje 1 (X391)
Captador de motoreje 1 (X311)
Contacto de respuesta bloqueo de arranque
Listo para el servicio/mensajede fallo
Asignación de bornes enversión de 1 eje
Consignas:
Valor prescrito de velocidad de giro ncons(entrada diferencial 10 V)
Valores reales:
Velocidad de giro real; 10 V corresponde a ncons
Valor prescrito de velocidad de giro adicional/con-signa de corriente (entrada diferencial 10 V)conmutación con KL22
Masa de referencia
Valor real de corriente; 10 V corresponde a Imáx.
Función de bornes:
Selección “Desplazamiento a tope”
+24 V
Selección “Modo con regulación de corriente”
Liberaciones específicas de ejes:
+24 V
Liberación del regulador eje 1
+24 V
Liberación del regulador eje 2
+24 V
Liberación del regulador eje 1
Potencial de referencia (masa) para esclavo KL20
Consigna de corriente para esclavo KL24
Entrada de consigna de corrienteKL24/KL20 del eje esclavo con KL22 se-leccionado (modo con regulación de co-rriente)
Desbloqueo específico de módulos:
Eje 1
Eje 2
1)
1) Conexión en función de la dirección de par deseada del eje esclavo

Interfaces de convertidor Análisis de errores
Función de bornes Nºfunc.
Borne deentrada 1)
2º Par límite 1 E1 (P–081)Oscilación 2 E6 (P–086)
Borrar memoria de fallos (R) 3 E3 (P–083)Modo con mando de par 4 E5 (P–085)Modo de estrella / triángulo 5 –
Modo M19 6 E4 (P–084)
Tiempo de aceleración=0 7 E2 (P–082)Bloqueo integrador regulador velocidad de giro 8 –
Confirmación de errores
Tecla de pará-metros
Accionamiento de la tecla de parámetros con el blo-queo de regulador activado. Si se puede confirmarel error, se vuelve al programa de operación.
Confirmaciónremota
Activación de uno de los siguientes bornes con bloqueo del regulador:– Borne “R” en el módulo de alimentación o de vigilancia– Borne “Borrar memoria de fallos” en el módulo HSA
Desconexión Desconectar el aparato y volver a conectarlo aprox. 2s después de que se apague el display
Conmutación ala interfaz gráficacon el usuario
Tras accionar la tecla se vuelve durante aprox.un minuto al programa de operación, pero sinconfirmar el error.
Habilitación consigna 16 –Posicionamiento incremental 22 –Consignas de posición 1...2 23 –Eje C 24 –
Filtrado de consigna de velocidad 25 –Inhibir F–11 26 –Consignas de posición 3...4 27 –
Escalón de reducción 9 E7 (P–087)
Posicionamiento CON 28 –Resincronización de cabezal 29 –
Función de relé Nº func.
Salida derelé 1)
Proceso de arranque terminado 2 A11 (P–241)|Md| < Mdx 3 A21 (P–242)|nreal| < nmin 1 A31 (P–243)|n real| < nx 4 A41 (P–244)
Prealarma temperatura motor 5 A51 (P–245)
Prealarma sobretemperatura convertidor 6 –Función de relé variable 1 7 A61 (P–246)Función de relé variable 2 8 –
en posición 2 10 –Relé modo de estrella 11 –Relé modo de triángulo 12 –nreal = ncons (actual) 20 –
en posición 1 9 –
Mensajede error Fallo
F–07 Almacenamiento de datos en FEPROM fracasadoF–08 Pérdida de datos irrecuperableF–09 Error sistema de captador 1 (captador de motor)F–10 Error sistema de captador 2 (captador de cabezal)F–11 Regulador velocidad giro con control máx.falta veloc.giro realF–14 Sobretemperatura motorF–15 Sobretemperatura convertidor
F–17 I0 Motor > Icons etapa de potenciaF–19 Sensor de temperatura (rotura, cortocircuito)
F–79 Interrupción de división
FP –01 Consigna > cantidad de líneas del captadorFP –02 Vigilancia de la marca cero activada
Bit 1 10 E8 (P–088)
Bit 2 11 E9 (P–089)
Bit 0
Escalón de reducción
Escalón de reducción
Fallos
1) Estado de entrega
tras Red – CON Visualizador de estado inactivo– faltan mín. dos fases (módulo NE)– mín. dos fusibles de entrada disparados
(módulo NE)– Fuente de alimentación de electrónica en el módulo NE defectuosa– Conexión de bus de aparato módulo HSA módulo NE no conectada o defectuosa– Módulo HSA defectuoso– EPROM/FEPROM defectuoso firmware no cargado
Liberacióndel regulador
Motor gira con máx. 30 rpm con ncons > 30 rpm o motoroscila con ncons < 30 rpm
– Campo de giro del motor incorrecto por causa de inversión de polos en el cable (invertir 2 conexio nesde fase)
Eje HPC 30 –Control de resbalamiento 32 –
FP –04 Ninguna marca cero válida
F–61 Frecuencia máxima del motor sobrepasada
FP –03 Desviación de marca cero > cantidad de líneas del captador
F–16 Número de código inadmisible de la etapa de potencia
– Cantidad de líneas del captador de motor introducida demasiado alta
Con la consigna de velocidad de giro, motor parado noigual a cero
– Función de oscilación seleccionada
Referencia abreviadapara SIMODRIVE 611sistema analógico– Módulo de cabezal
Siemens AG 2000 All Rights Reserved Edición 10.00
Documentación correspondiente:
Instrucciones para proyecto 6SN1197–0AA00–0EP
Instrucciones de puesta en marcha 6SN1197–0AA60–0EP

Esc. reducción bit 01)
Primeros pasos Interfaces de convertidorConfiguración del sistema
Elementos de manejo e indicación Visualizador estado Superficie de conexión
Inactivo Función derelé
Clase deservicio
Estado delaparato
Escalón dereducción
Clase deservicio
Valor de parámetro
Número deparámetro
Número de subparámetro
PE2
Bornes de conexión del motor
X432 Captador de cabezal,Bero o salida de captadoren CN
PE1 2 W2 VU2
Placa de características
Estado del producto
P 600
M 600Circuito intermedio
X151 Bus interno X351
X412 Captador demotor RON350
Visualizador de cristallíquido
P
X411InterfazRS232C
Entradas
X431
X421
Bornes de medición
M
M
X451
DAU 2
DAU 1
X441
2. Md valor límite1)
IFRFHSS
⊇ real min1)
⊇ real x1)
Salidas
Esc. reducción bit 21)Esc. reducción bit 11)
Tensión de desbloqueo
663
91 A
92 A
5614248
6581
E1E2E3E4
E5E6E7E8E9
289A11A21A31A41A51A61672
673674
AS1AS2
TH = 01)
RESET1)
M19 1)
Md controlado1)
Oscilación1)
Sobretemp. motor1)
Sobretemp. convertidor1)
Listo para el servicio/fallo
Cont. de señalizaciónBloqueo de arranque
nreal = ncons1)
d dx1)
Indicaciones para la puesta en servicio
Nueva iniciali-zación del con-vertidor (si es necesa-rio)
Ajustar P–051 a 4H Ajustar P–097 a 0H Ajustar P–052 a 1H y esperar hasta que P–052
vuelva a colocarse en 0H Desconectar el aparato y volver a conectarlo
aprox. 2 s después de que se apague el display:en el display tiene que aparecer P–095
Realizar inicialización
Cambio del firm-ware (si es necesario)
Salvar datos de ajuste (parámetros) Realizar cambio del firmware con el programa
de puesta en servicio Realizar inicialización con bloqueo de impulsos
y del regulador Volver a cargar los datos de ajuste salvados Salvar datos de ajuste en la memoria de datos
de máquina del accionamiento
Número Área de-visualización
(P–099) Versión firmwareIdentificación de módulo
Versión del firmware y configuración del módulo
Descripción
0.00 ... 99.00–(P–150)
Posibilidadespara la puestaen servicio
a través de elementos de manejo y de indicación interfaz RS232C con un ordenador
compatible con IBM/AT
1) Estado de entrega de los bornes y funciones de relé libremente programables
Escalón dereducción 1
Escalón dereducción 2
Escalón dereducción 3
Escalón dereducción 4
Escalón dereducción 5
Escalón dereducción 6
Escalón dereducción 7
Escalón dereducción 8
Conexión en estrella 2)
Conexión en triángulo 2)
Entrada digitalFiltro 2)
Posición 13)
Pos. 2 3)
Pos. 3 3)
Pos. 4 3)
Pos. incr.3)
Falta liberaciónen el módulo dealimentación
Falta liberaciónde impulsos esp.de ejes
Falta liberacióndel regulador
Falta liberacióngenerador derampa
Falta libe-ración deconsigna
con motor 4)
con generador 4)
Estado deespera
Modo con reg. develocidad de giro
Modo contro-lado por par
M 19
Posicionar
Eje C
Funcionamiento con control l/f
Borne A11P–241
Borne A21P–242
Borne A31P–243
Borne A41P–244
Borne A51P–245
Borne A61P–246
Borne 672/674P–053
DAU 4DAU 3
Codificación de las variantes:F00H Versión básica200H con entrada adicional para captador de cabezal300H con salida de señales de captador para el uso externo
M
X1
IR
X2
!"#
#$
%
&' $
"
( #)
*+
!"#
#$
%
&' $
" %
#
#
#
"
,-
!"#
#$
"
"#
#$ "
#,
"
.
Eje HPC0,5 ms ( 0,6 ms)
Funcionamiento contro-lado por par con controlde resbalamiento
9

F–60 Error en el ajuste automático
Error en el cambio de salida digital
14
Interfaces de convertidor Análisis de errores
Función de bornes Nº func. Borne deentrada 1)
2. Par límite 1 E1 (P–081)Oscilación 2 –Borrar memoria de fallos (R) 3 E3 (P–083)(Confirmación de errores)
Tiempo de aceleración=0 7 E2 (P–082)
Confirmación de erroresTecla de parámetros
Accionamiento de la tecla de parámetros con elbloqueo de regulador activado. Si se puede confir-mar el error, se vuelve al programa de operación.
Confirmaciónremota
Activación de uno de los siguientes bornes con bloqueo del regulador:– Borne “R” en el módulo de alimentación o de
vigilancia– Borne “Borrar memoria de fallos” en el módulo AM
Desconexión Desconectar el aparato y volver a conectarloaprox. 2 s después de que se apague el display
Conmutación a lainterfaz gráfica conel usuario
Tras accionar la tecla se vuelve durante aprox.un minuto al programa de operación, pero sin con-firmar el error.
Giro a la derecha / izquierda 12 –Generador de rampa 2 13 –Aumentar consigna 14 –Reducir consigna 15 –Habilitación consigna 16 –
Escalón de reducción 9 E7 (P–087)
Función de relé Nº func. Salida derelé 1)
Proceso de arranque terminado 2 A61 (P–246)|Md| < Mdx 3 A21 (P–242)
|nreal| < nmin 1 A31 (P–243)
|n real| < nx 4 A41 (P–244)
I2t Preaviso 5 A51 (P–245)
Prealarma sobretemp. convertidor 6 –Función de relé variable 1 7 –Función de relé variable 2 8 –
Motor 2 activo 12 –Motor 3 activo 13 –Motor 4 activo –
Motor 1 activo –
Mensajede error
Anomalía
F–07 Almacenamiento de datos en FEPROM fracasadoF–08 Pérdida de datos irrecuperableF–11 Consigna de frecuencia > frecuencia máximaF–13 Modulación máxima regulador de excitación
F–15 Sobretemperatura convertidor
F–17 I0 Motor > Icons etapa de potencia
Bit 1 10 E8 (P–088)
Bit 2 11 E9 (P–089)
Bit 0
Fallostras Red – CON Visualizador de estado inactivo
– faltan mín. dos fases (módulo NE)– se han disparado mín. dos fusibles de
entrada (módulo NE)– alimentación de electrónica en el módulo NE
defectuosa– conexión bus interno módulo AM módulo
de alimentación no conectada o defectuosa– módulo AM defectuoso– EPROM/FEPROM defectuoso– firmware no cargado
Liberacióndel regulador
Motor gira a la izquierda aunque el módulo AMemite campo de giro derecho y viceversa
– Campo de giro del motor incorrecto por causa de inversión de polos en el cable (invertir 2 conexiones de fase)
F–05 Intensidad de motor = 0
11
Selección de consigna fija 17 E4 (P–084)
Bit 1 18 E5 (P–085)
Bit 2 19 E6 (P–086)
Bit 0
Selección motor 20 –Bit 1 21 –Bit 0
1) Estado de entrega
Bit 3 24 –
20 A11 (P–241)nreal=ncons
F–51 Error de parametrización: par nominal demasiado grande
F–52 Error de parametrización: constante de par inadmisible Referencia abreviadapara SIMODRIVE 611sistema analógico– Módulo de motor asíncrono
Siemens AG 2000 All Rights Reserved Edición 10.00
Documentación correspondiente:
Instrucciones para proyecto 6SN1197–0AA00–0EP
Instrucciones de puesta en marcha 6SN1197–0AA60–0EP
F–16 Número de código inadmisible de la etapa de potencia
F–04
F–14 Sobretemperatura motor
F–19 Sensor de temperatura motor
F–53 Error de parametrización: Corriente nominal del motordemasiado baja
F–90 Velocidad de giro máxima BERO sobrepasada

Primeros pasos Interfaces de convertidorConfiguración del sistema
Elementos de manejo e indicación Visualizador estado Superficie de conexión
Número demotor
Función derelé
Clase de servicio Estado delaparato
Escalones dereducción
Fuente deconsignas
Valor de parámetro
Número de parámetro
Número de subparámetro
PE2Bornes de conexión del motor
X432
PE1 2 W2 VU2
Placa de característicasEstado del producto
P 600
M 600Circuito intermedio
X151 Bus interno X351
X412
Visualizador decristal líquido
+ P –
X411 InterfazRS232C
Entradas
X431
X421
Bornes de medición
n1M
M
X451
X441
2. Md valor límite1)
IF
RF
|nreal| < nrpm)
|nreal| < nx1)
Salidas
Tensión de desbloqueo
663
91 A
92 A
5614248
6581
E1E2E3E4
E5E6
E7E8
E99
289A11A21A31A41A51A61
672673
674
AS1
AS2
TH = 01)
RESET1)
Listo para el servicio/fallo
Cont. de señalizaciónBloqueo de arranque
nreal = n cons1)
|Md| < Mdx1)
Indicaciones para la puesta en servicio
Nueva iniciali-zación del con-vertidor (si esnecesario)
Ajustar P–051 a 4H Ajustar P–097 a 0H Ajustar P–052 a 1H y esperar hasta que
P–052 vuelva a colocarse en 0H Desconectar el aparato y volver a conectarlo
aprox. 2 s después de que se apague el display: en el display tiene que aparecer P–095 o P–096
Realizar inicialización
Cambio del firm-ware (si es nece-sario)
Salvar datos de ajuste (parámetros) Realizar cambio del firmware con el programa
de puesta en servicio Realizar inicialización con bloqueo de impul sos y del regulador Volver a cargar los datos de ajuste salvados Salvar datos de ajuste en la memoria de datos
de máquina del accionamiento
Número Área de-visualización
(P–099) Versión firmware
Versión del firmware y configuración del módulo
Descripción
0.00 ... 99.00
Posibilidadespara la puesta enservicio
a través de elementos de manejo y de indicación interfaz RS232C con un ordenador
compatible con IBM/AT
1) Estado de entrega de los bornes y funciones de relé libremente programables
Escalón dereducción 1
Escalón dereducción 2
Escalón dereducción 3
Escalón dereducción 4
Escalón dereducción 5
Escalón dereducción 6
Escalón dereducción 7
Escalón dereducción 8
Consigna ana-lógica y con-signa fija
Consigna0
Consigna fija1 a 7
Potenciómetrode motor
Captador deoscilación
Optimizaciónautomática
Falta liberaciónen el módulo dealimentación
Falta liberaciónde impulsos esp.de ejes
Falta liberacióndel regulador
Falta liberación ge-nerador de rampa
Falta liberaciónde consigna
con motor 1)
con generador 1)
Estadode espera
Modo con controlo conregulaciónde velocidad
Borne A11P–241
Borne A21P–242
Borne A31P–243
Borne A41P–244
Borne A51P–245
Borne A61P–246
KL672/674P–053
DAU 4DAU 3
M
X1
IR
X2
Motor 1
Motor 2
Motor 3
Motor 4
Consignaanalógica
2) Función no es posible con MLFB 6SN1122–0BA11–0AA0
n22) CONVERTIDOR DIGI-
TAL/ANALÓGICO 22)
CONVERTIDOR DIGI-TAL/ANALÓGICO 12)
HSS
Consigna fija bit 21)
Esc. reducción bit 21)Esc. reducción bit 11)
Consigna fija bit 01)
Consigna fija bit 11)
Esc. reducción bit 01)
I2t Preaviso1)
Proceso de arranqueterminado1)
Mensajes contacto medio
1) Indicación de la dirección del parcon el motor liberado
Consigna fija8 a 15
3) sólo con MLFB 6SN1122–0BA11–0AA1; por lo demás no debe tener lugar nin guna ocupación
EntradaBERO3)
EntradaSensor detemperaturamotor3)

10.00
Índice-1 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Índice general
AAdaptación de flujo, HS/2-51Adaptación del taco, VS/1-3, VS/2-18, VR/2-14Ajuste del tiempo de acción integral TN, VR/2-16Ajustes del regulador de intensidad, VS/1-3,
VR/1-5Ajustes en valores fijos, VS/5-38Ajustes estándar, VS/1-3, VR/1-3Alimentación no regulada, HS/2-16Alisado, consigna de velocidad, HS/4-69Alisamiento
consigna de par, HS/4-73valor real velocidad, HS/4-70
Alisamiento de consigna de par, HS/4-73Alisamientos, VR/3-18Aplicaciones estándar, HS/1-4, HS/2-24, HS/2-26,
AM/1-4, AM/2-22parámetros de ajuste, AM/2-23
BBanda muerta, AM/4-63BERO, HS/2-31, HS/2-34, HS/2-35, HS/2-38,
HS/2-41Bit, HS/1-6Bloqueo integrador, VR/3-18Bornes de conexión, VR/9-31Bornes de entrada, HS/3-56, AM/3-40Bornes de salida, HS/3-59, AM/3-43Búsqueda de fallos, VS/8-48
CCable, RE/2-6CDA, HS/3-66, AM/3-48, AM/5-80Cifras hexadecimales, HS/1-6Código de parte de potencia, AM/2-16Códigos de motores, HS/6-99Códigos de partes de potencia, HS/6-99Códigos para partes de potencia y motores
estándar, HS/6-99Compensación de deriva, VS/2-23, VR/2-16Compensación de peso, eléctrica, VS/3-30,
VS/3-32Compensación eléctrica de peso, VR/3-19Conector, RE/2-5Conexiones, HS/1-13, AM/1-14
bornes de conexión, HS/6-105, AM/6-105bornes de relé, HS/6-106, AM/6-106conmutación estrella/triángulo, HS/6-107esquema de conexión, HS/6-104, AM/6-104
Configuración maestro/esclavo, HS/2-43Conmutación de motores, AM/2-32
Conmutación de parámetros en modo de eje C,VS/5-39
Conmutación del juego de parámetros, AM/2-32Consigna de velocidad, HS/3-53
alisado, HS/4-69normalización, HS/3-54selección de canal, HS/3-53unipolar, HS/3-54velocidad estacionaria mínima, HS/3-55
Consigna fija, AM/3-38Convertidor
estado, AM/2-22reinicialización, AM/1-7
Corrección de error de fase del captador, HS/2-26
DDatos de ajuste, panorámica, HS/1-12, AM/1-13Debilitamiento de campo, margen, AM/4-65Decalaje de origen, ajuste fino, VR/3-17Desbloqueo consigna, HS/3-57Diagnóstico, VS/8-45, VR/8-29, HS/5-77, AM/5-75
parámetros, HS/5-81Display, HS/2-24, HS/5-87, AM/2-22, AM/5-87
EEje C, HS/2-24, HS/2-30Elementos de ajuste
con interfase confortable, VS/3-29con interfase estándar, VS/3-25, VR/4-21,
VR/4-22Elementos de indicación, módulos de vigilancia y
NE, NE/2-7Elementos de indicación de los módulos de
avance, VS/8-45Elementos de mando y señalización, HS/1-8,
AM/1-9Encendido, VR/7-27Escalón, HS/2-24, HS/3-57, AM/2-22Esquema de bloques de la interfase estándar,
VS/9-54Esquema de bloques de la unidad de ajuste,
VS/9-53Esquema de bloques del lazo de regulación,
VS/9-55Esquema de bloques del módulo opcional cabe-
zal, VS/9-52Esquema de bloques lado de componentes,
VR/9-32Esquema de bloques lado de soldadura, VR/9-33Estado equipo convertidor, HS/2-24
Índice general

10.00
Índice-2 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
FFallo, AM/5-88
acuse, AM/5-87código, AM/5-88indicación, AM/5-87
Fallos, HS/5-91acuse, HS/5-87indicación, HS/5-87inhibición, HS/5-87
Filtro, HS/4-74Frecuencia de pulsación del convertidor, AM/4-57Frecuencia pulsación ondulador, HS/4-76Función de registro de transitorios, AM/5-84Función de relé, variable, AM/3-47Función de relé, salida de los detectores del
límite, VS/5-37Función monitor, AM/2-36Función relé, HS/2-24, AM/2-22Funciones, en valores fijos, VS/5-38Funciones de bornes
asignación, AM/3-41cableadas, HS/3-56, AM/3-40programables, HS/3-57, AM/3-41
asignación de funciones, HS/3-57Funciones de relés
cableadas, HS/3-59, AM/3-43programables, HS/3-59, AM/3-44
palabra de mando, HS/3-62, AM/3-46señalizaciones parametrizables, HS/3-62,
AM/3-46variables, HS/3-63
GGanancia del regulador de intensidad, VR/1-5Ganancia Kp, VR/2-15
con adaptación, VS/2-21sin adaptación, VS/2-18
Ganancia proporcional, VR/2-15con adaptación, VS/2-21
Ganancia proporcional Kp, VS/2-18Ganancia regulador intensidad, VS/1-4Generador de rampas, HS/4-70, AM/4-54
HHembrillas de medida, VR/8-29, VR/8-30,
HS/5-82, AM/5-80asignación, HS/5-82normalización IR, HS/5-82
Hembrillas de medida y elementos de indicación,VS/8-45interfase confortable, VS/8-45interfase estándar, VS/8-47
IIdentificador de módulo, HS/2-25Imagen de la temperatura del motor, AM/2-25Indicación de estado
entradas binarias, HS/5-78, AM/5-76funciones activas 1, AM/5-77funciones activas 2, AM/5-78funciones activas de los bornes, HS/5-79,
HS/5-80Indicación de fallo, VS/8-46Indicación en display de valores medidos,
AM/5-75Indicadores LED, VR/8-29Inicialización, HS/2-15, HS/2-17, HS/2-20,
AM/2-16Instrucciones de diagnóstico, NE/2-10Intensidad en vacío, AM/4-59, AM/4-70
del motor, AM/4-70Interfase confortable, VS/1-3Interfase de consigna de velocidad, AM/3-37
selección de canal, AM/3-37Interfase estándar, VS/1-3, VS/9-54Interfase RS232C, AM/1-7, AM/1-14Interfases, AM/6-106Interfases de consigna, VR/4-21Interfases de consigna de velocidad, prioridad de
consignas, AM/3-39
JJuego datos motor, AM/2-17Juego de parámetros, HS/2-21Juego de parámetros de motor, HS/2-18
LLado de componentes, VR/3-18, VR/9-32Lado de soldadura, VR/3-18, VR/9-33Lazo de regulación, VS/9-55Limitación de consigna de intensidad, VR/3-17Limitación de la acción I, VS/2-22Limitación de par, VS/5-36Limitación TN, VR/3-18Limitaciones, AM/4-61Límite de par, HS/2-27, HS/3-57, AM/2-24Lista de parámetros, HS/6-113, AM/6-108
MM19, HS/2-24, HS/2-29, HS/3-57Maestro/esclavo, VS/3-29, VR/3-18, VR/3-19Mando intensidad/frecuencia, AM/5-86Mantenimiento y diagnóstico, VS/8-45, VR/8-29
Índice general

10.00
Índice-3 Siemens AG 2000 All Rights reservedSIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Marcha a tope fijo, VS/3-29Margen con debilitamiento de campo, AM/2-21Margen de velocidad, AM/2-21Margen en lazo abierto, AM/4-60Memoria de valores mínimos/máximos, AM/5-83Modo, HS/2-24, AM/2-22
esclavo con regulación I, VR/4-21esclavo, reg. I, VR/3-18, VR/3-19maestro con regulación n, VR/4-21maestro, reg. n, VR/3-18, VR/3-19
Modo eje C, VS/5-39Modo mando de par, HS/2-43
accionamiento esclavo, HS/2-43, HS/2-44accionamiento maestro, HS/2-43consigna de par, HS/2-43, HS/2-44descripción de la función, HS/2-43
Módulo opcional cabezal, VS/9-52Momento de inercia, AM/2-17, AM/4-56, AM/6-98
total, AM/4-56Motores especiales
características de la consigna de flujo,HS/2-19
características de la inductancia principal,HS/2-19
inicialización, HS/2-17juego de parámetros de motor, HS/2-18
Motores estándar, inicialización, HS/2-15Motores estrella/triángulo, HS/6-101
característica de la consigna de flujo, HS/2-22característica de la inductancia principal,
HS/2-22conmutación de motores, HS/2-23conmutación motor, HS/3-57inicialización, HS/2-20juegos de parámetros, HS/2-21
Motores para incorporar, HS/6-102Motores refrigerados por agua, HS/6-101
NNormalización de intensidad real, VS/1-4Normalización de la indicación M/P, VS/5-37Normalización del valor real de intensidad,
VR/1-5Normalización del valor real de velocidad, VR/1-4Número de polos, VR/1-3Número de rayas, interfase WSG, VR/3-17
OOcupación de conectores
BERO, HS/6-109captador cabezal, HS/6-109salida señales captador motor, HS/6-110
Ocupación de los conectores, VR/9-35Ocupación de los conectores X311 y X313,
VS/9-56Operación con motores en paralelo, AM/2-27
Operación con varios motores, AM/2-27Optimización
manual, AM/4-64margen en lazo abierto, AM/4-60
Orden de las pistas A, B (WSG), VR/3-17Origen consigna, AM/2-22Oscilación, HS/3-57
de cabezal para engrane, AM/2-26Oscilación de cabezal para engrane, HS/2-28
PParada orientada del cabezal, HS/2-29Parada sin giro en sentido opuesto, AM/4-63Parámetro
atributos, AM/1-5carga en FEPROM, HS/1-9de diagnóstico, AM/5-79de mando, AM/1-10dependientes del escalón de reducción,
HS/1-8margen de ajuste, HS/1-6, AM/1-5, AM/1-6número, HS/1-5, HS/1-8, AM/1-9número de subparámetro, HS/1-8, AM/1-9protección en escritura, HS/1-6, AM/1-6representación, AM/1-5valor, HS/1-8, AM/1-9
Parámetrosatributos, HS/1-5margen de ajuste, HS/1-5protección en escritura, HS/1-9representación, HS/1-5
Parámetros de ajuste, AM/6-108Parámetros de ajuste y control, HS/6-113Parámetros de indicación, HS/5-77Parámetros de visualización, HS/2-24, AM/2-22Paro sin giro en sentido opuesto, AM/3-40Placa de características, AM/1-14Posicionamiento
marca 0 u origen, HS/2-33velocidad de búsqueda, HS/2-38
Posicionamiento del cabezal, HS/2-30consigna de posición, HS/2-32, HS/2-33,
HS/2-34, HS/2-40, HS/3-57consigna de posición actual, HS/2-41descripción de la función, HS/2-30impulso cero, HS/2-37impulso de origen, HS/2-32marca 0, HS/2-31, HS/2-35, HS/2-38,
HS/2-41, HS/2-42marca 0 u origen, HS/2-34parámetros de diagnóstico, HS/2-41puesta en marcha abreviada, HS/2-42regulador de posición, HS/2-36señalizaciones por relé, HS/2-33velocidad de búsqueda, HS/2-31, HS/2-32,
HS/2-40Potenciómetro motorizado, AM/3-37
Índice general

10.00
Índice-4 Siemens AG 2000 All Rights reserved
SIMODRIVE 611 Sistema analógico Instrucciones de puesta en marcha (IAA) – Edición 10.00
Prioridad de consignas, AM/3-39Procesamiento de informaciones de posición,
VR/3-17Puesta en marcha
abreviada, VS/1-3, VR/1-3consejos, HS/1-7, AM/1-7estándar, VS/1-3, VR/1-3etapas, VR-iietapas de puesta en marcha, VS-iinueva, AM/6-92posibilidades, HS/1-7, AM/1-7
Puesta en marcha con opción de cabezal (HSA),VS/5-35
RReactancia campo principal, AM/2-18, AM/4-71Reducción de corriente, con frecuencia de pulsa-
ción > 3,2 kHz, HS/1-11Reducción de potencia, AM/4-57Registro de transitorios, función, HS/5-84Regulador de campo, AM/4-59, AM/4-69Regulador de intensidad, HS/4-75, AM/4-57Regulador de velocidad
adaptacion, AM/4-55adaption, HS/4-72ciclo (cadencia), AM/4-56ganancia, HS/4-71, AM/4-55tiempo de acción integral, HS/4-71, AM/4-55
Reinicialización del equipo convertidor, HS/1-7Resistencia, del rotor, AM/4-73Resistencia rotor motor frió, AM/2-17
SSalidas analógicas, HS/3-65, AM/3-48
conexión para indicaciones analógicas,AM/3-50
normalización fina, HS/3-67indicación M/M nom, HS/3-67indicación nreal, HS/3-67indicación P/Pmáx, HS/3-67
parametrización CDA 1, CDA 2, HS/3-66,AM/3-49
Señalización fallo, VR/3-18Series de máquinas, HS/1-7, AM/1-8Sustitución
de componentes, AM/1-8del módulo, AM/1-8
Sustitución de componentes, HS/1-7Sustitución del firmware, HS/1-7, AM/1-7Sustitución del módulo, HS/1-7
TTablas de adaptación, VS/1-5, VR/1-5Temporizador, VS/3-29, VR/3-18Tensión en circuito intermedio, fija, AM/2-16Tiempo de acceleración, VS/5-35Tiempo de acción integral, VR/2-16
con adaptación, VS/2-20Tiempo de acción integral TN, sin adaptación,
VS/2-19Tiempo de acción integral/regulador de velocidad,
VR/2-16TN (tiempo de acción integral), VR/2-16
UUnidad de ajuste, VS/9-53
VValor de ajuste de velocidad, HS/2-26, AM/2-23Valores medidos, indicación, HS/5-77Variable en RAM, AM/6-107
direcciones, AM/6-107Variables en RAM, HS/6-112
direcciones, HS/6-112Velocidad
estacionaria mínima, AM/4-62márgenes, AM/4-62
Velocidad de conmutación, AM/2-18, AM/2-21Velocidad estacionaria mínima, HS/3-55Versión de firmware, HS/2-25Versión del firmware, AM/2-23Vigilancia
de deslizamiento, HS/2-45temperatura del motor, HS/2-28
Vigilancia de temperatura en motor, AM/2-24Vigilancia de velocidad máxima, AM/2-23Visualización de estado, VS/8-45, HS/2-24,
AM/2-22
Índice general

Remitente
Nombre
Dirección de su empresa/departamento
Calle
CP: Lugar:
Teléfono: /
Sugerencias
Correciones
para el impreso:
SIMODRIVE 611 Sistema analógicoSistema de regulación a transistores paraaccionamientos de avance de c.a. y accionamientos de cabezal de c.a.
Documentación para el servicio técnico del fabricante
Instrucciones de puesta en marcha
Nº de ref.: 6SN1197-0AA60-0EP6Edición: 10.00
Si durante la lectura de este documento encuentraalgún error de imprenta, rogamos nos lo comuniquerellenando este formulario. Asímismo agradecería-mos sugerencias y propuestas de mejora.
AnSIEMENS AGA & D MC BMSPostfach 3180
D–91050 Erlangen(Tel. 0180 / 5050 – 222 [Hotline] Fax ++49/9131 / 98 – 2176email: [email protected])
Fax: /
Sugerencias y/o correcciones

Documentación de carácter general
Documentación para el fabricante/service
SIMODRIVE
SIMODRIVE
Sinópsis de documentación SIMODRIVE 611 Sistema analógico
CatálogoDocument. para pedidos NC 60
Directrices EMCpara controlesSINUMERIK y SIROTEC
Instrucciones paraproyecto
Motores
Motores trifásicos para accionamien-tos de avance y de cabezal
SIMODRIVE
611
SIMODRIVE
Accesorios
CatálogoAccesorios y equipamientospara maquinaria especial
SIROTECSINUMERIK
SIMODRIVE
611–A
SIROTECSINUMERIK
SINUMERIK
Descripción
SIMODRIVE 611 Si-stema analógico
Software de puestaen marcha para módulosde cabezal y motorasíncrono, versión 2
SIMODRIVE
611–A
Documentación para servicio técnico
DOC ON CD
El sistema SINUMERIK
SINUMERIKSIMODRIVE
840D/810D/FM–NC/611/Motores
Instrucciones de puestaen marcha
SIMODRIVE 611Sistema analógico
Ondulador pulsado de transistor paraaccionamientos deavance trifásicosy accionamientos de cabezal trifásicos
Instruccionesproyecto
Ondulador pulsado de transistor para accionamientos deavance trifásicosy accionamientos de cabezal trifásicos







