
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA
“ANTONIO JOSE DE SUCRE”
VICERRECTORADO BARQUISIMETO
DIRECCION DE INVESTIGACION Y POSTGRADO
MAESTRIA EN INGENIERÍA DE CONTROL DE PROCESOS
CONTROL DE PROCESOS
PROF. JESÚS M. ARAQUE R.
CLASE 1

Repaso de teoría de control
continuo y discreto
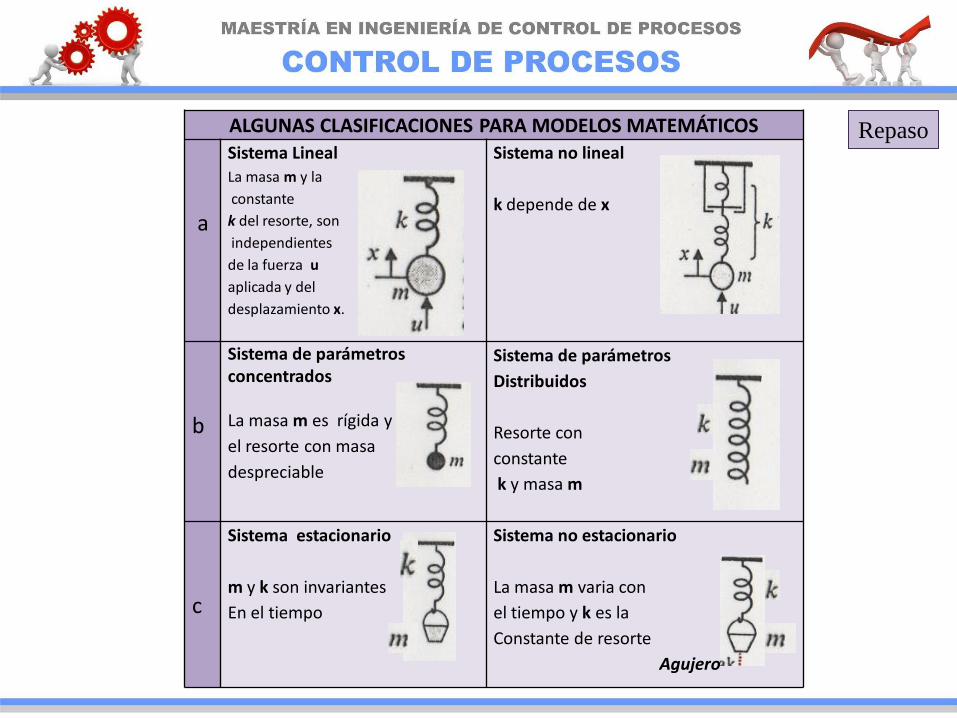
ALGUNAS CLASIFICACIONES PARA MODELOS MATEMÁTICOS
a
Sistema Lineal La masa m y la
constante
k del resorte, son
independientes
de la fuerza u
aplicada y del
desplazamiento x.
Sistema no lineal
k depende de x
b
Sistema de parámetros concentrados
La masa m es rígida y
el resorte con masa
despreciable
Sistema de parámetros
Distribuidos
Resorte con
constante
k y masa m
c
Sistema estacionario
m y k son invariantes
En el tiempo
Sistema no estacionario
La masa m varia con
el tiempo y k es la
Constante de resorte
Agujero
Repaso
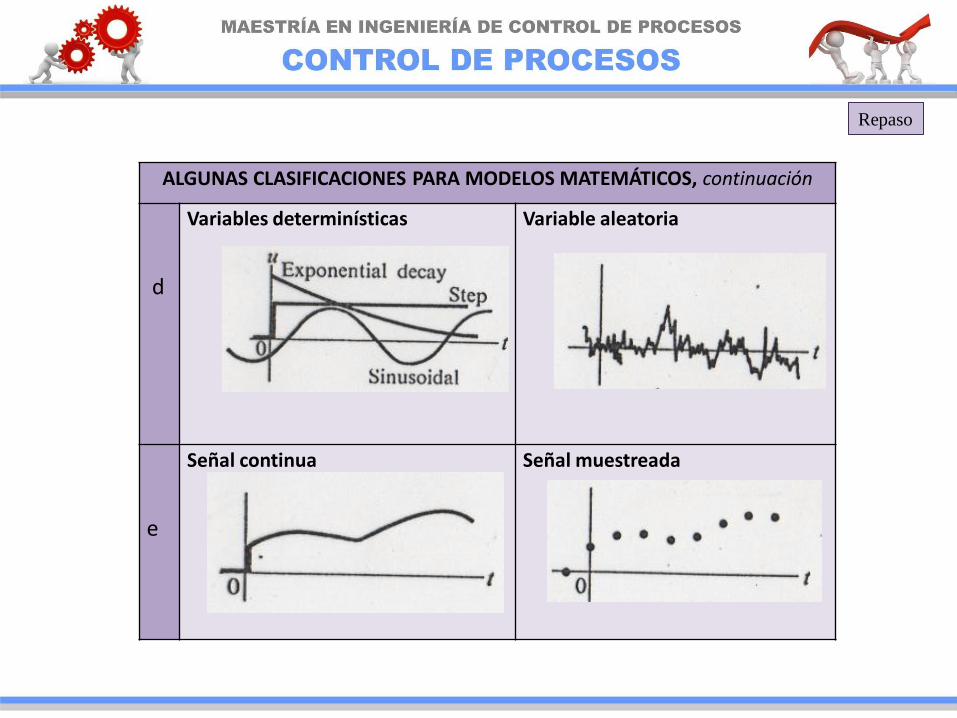
ALGUNAS CLASIFICACIONES PARA MODELOS MATEMÁTICOS, continuación
d
Variables determinísticas Variable aleatoria
e
Señal continua Señal muestreada
Repaso
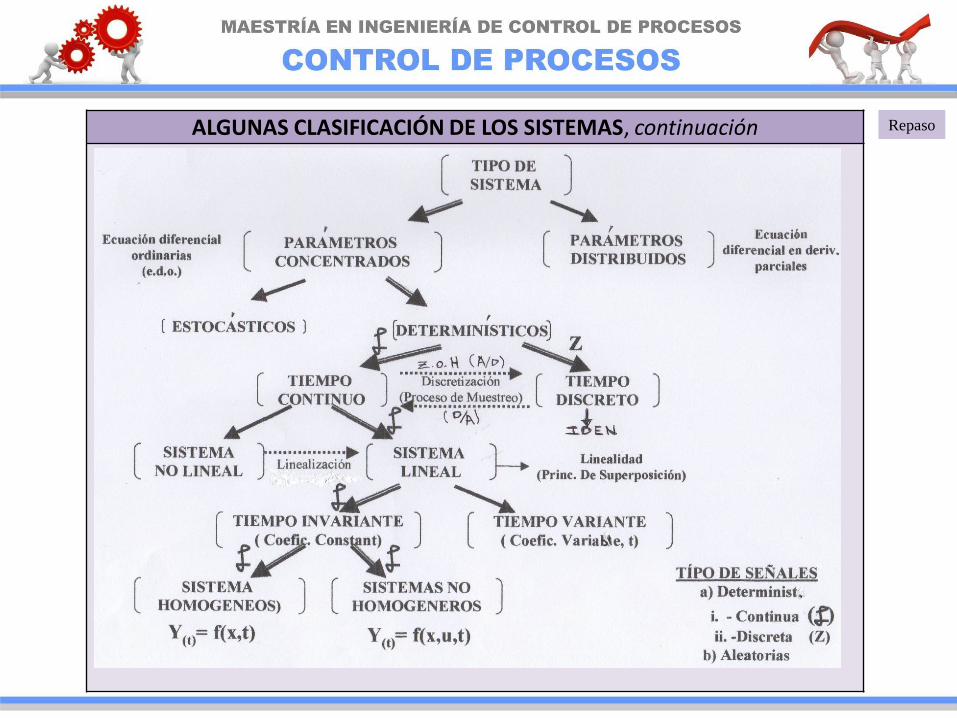
ALGUNAS CLASIFICACIÓN DE LOS SISTEMAS, continuación Repaso
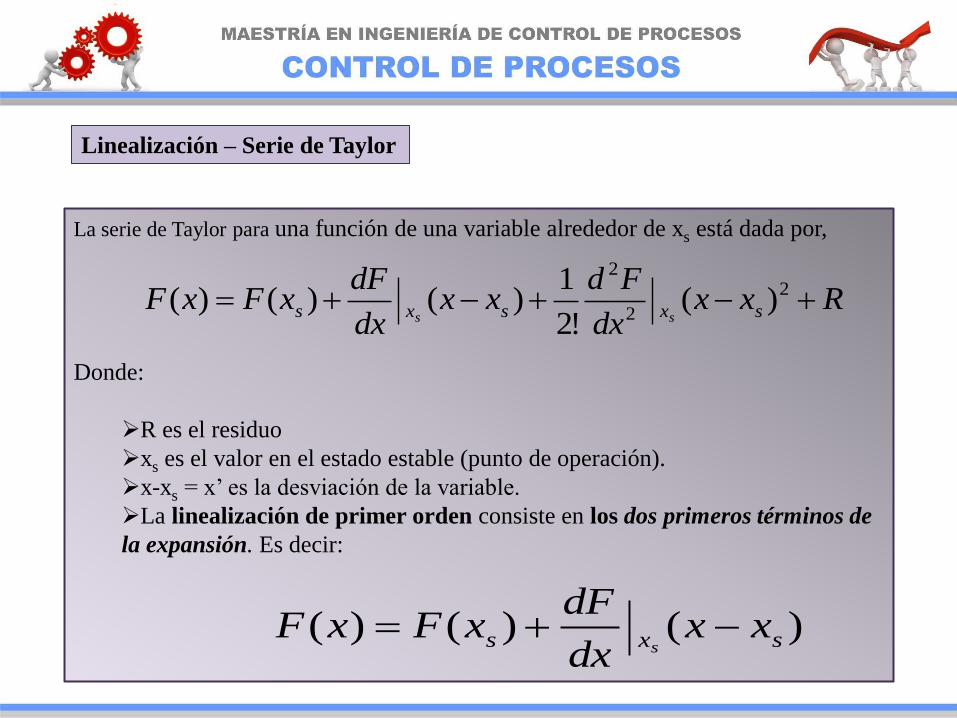
La serie de Taylor para una función de una variable alrededor de xs está dada por,
Donde:
R es el residuo
xs es el valor en el estado estable (punto de operación).
x-xs = x’ es la desviación de la variable.
La linealización de primer orden consiste en los dos primeros términos de
la expansión. Es decir:
Rxxdx
Fdxx
dx
dFxFxF sxsxs ss
2
2
2
)(!2
1)()()(
)()()( sxs xxdx
dFxFxF
s
Linealización – Serie de Taylor
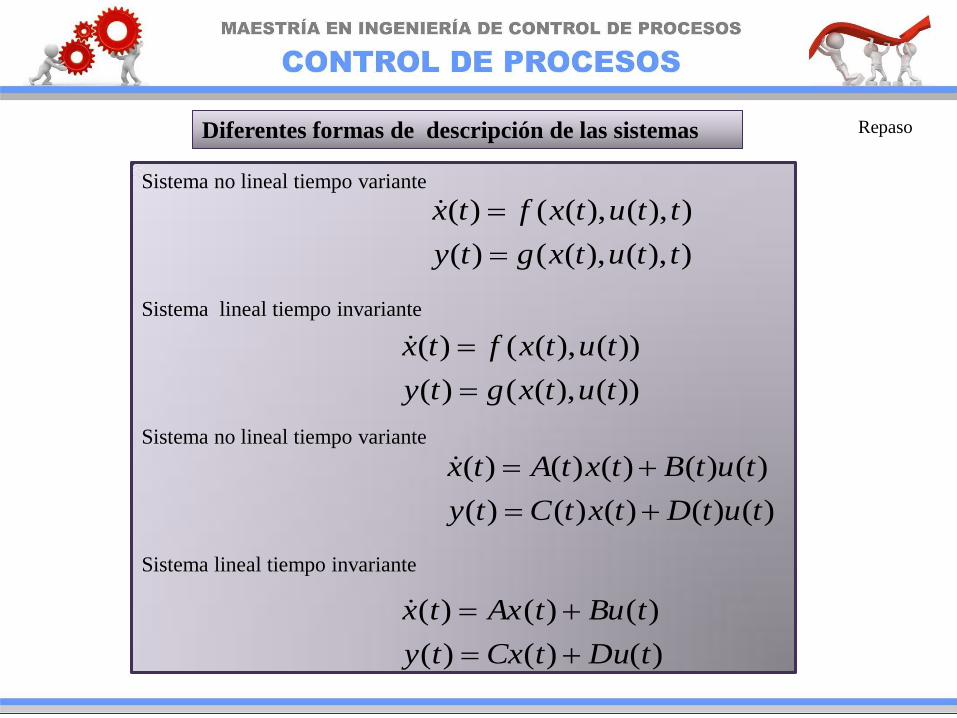
Sistema no lineal tiempo variante
Sistema lineal tiempo invariante
Sistema no lineal tiempo variante
Sistema lineal tiempo invariante
)),(),(()(
)),(),(()(
ttutxgty
ttutxftx
))(),(()(
))(),(()(
tutxgty
tutxftx
)()()()()(
)()()()()(
tutDtxtCty
tutBtxtAtx
)()()(
)()()(
tDutCxty
tButAxtx
Diferentes formas de descripción de las sistemas Repaso
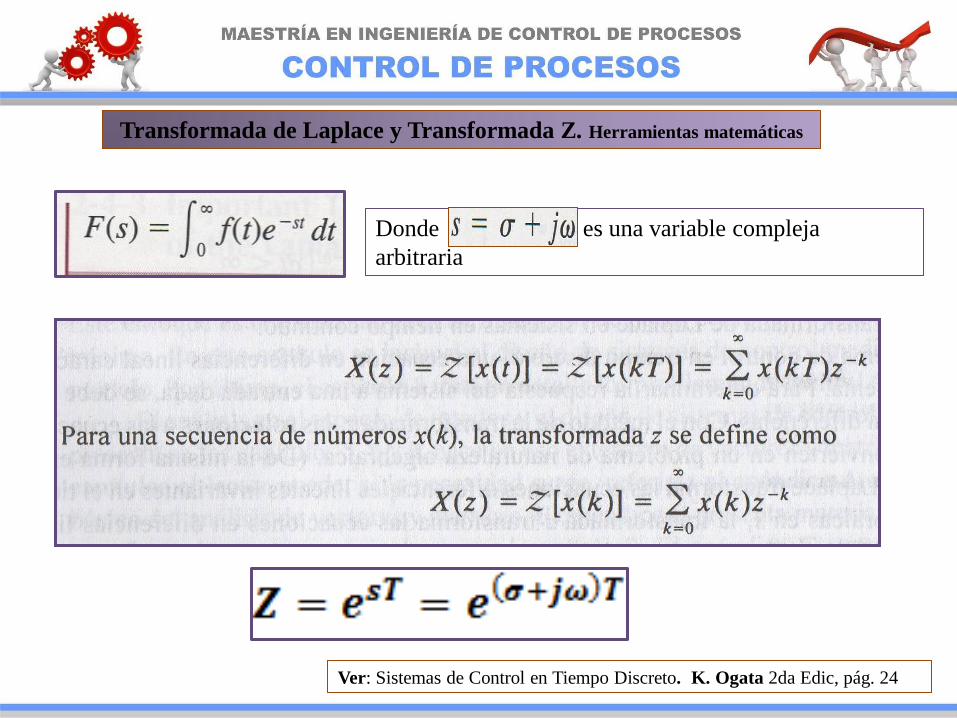
Transformada de Laplace y Transformada Z. Herramientas matemáticas
Donde es una variable compleja
arbitraria
Ver: Sistemas de Control en Tiempo Discreto. K. Ogata 2da Edic, pág. 24
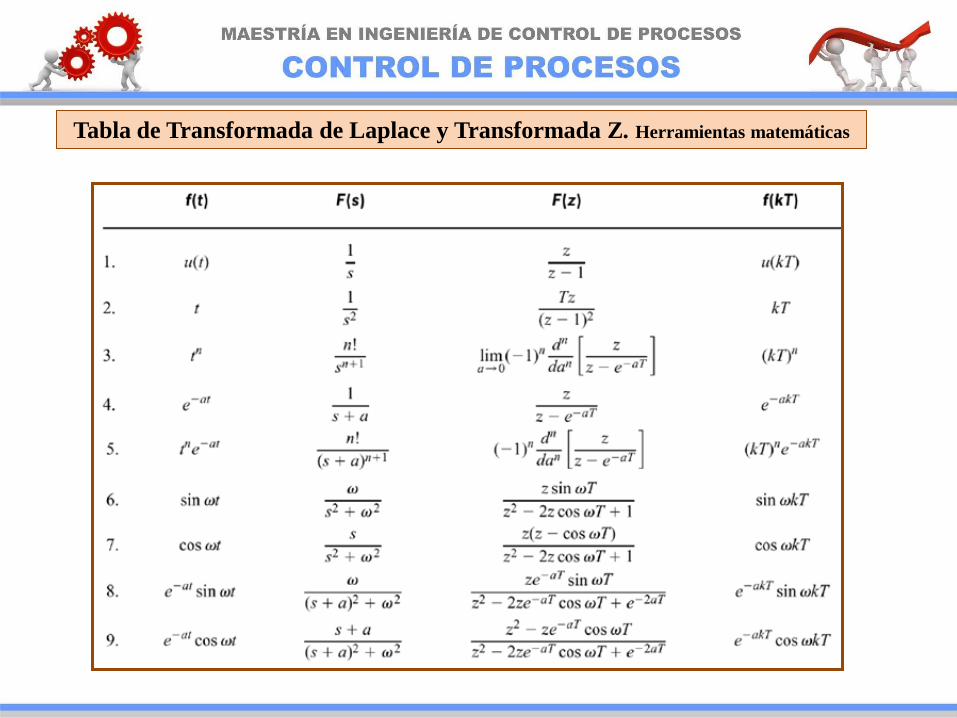
Tabla de Transformada de Laplace y Transformada Z. Herramientas matemáticas
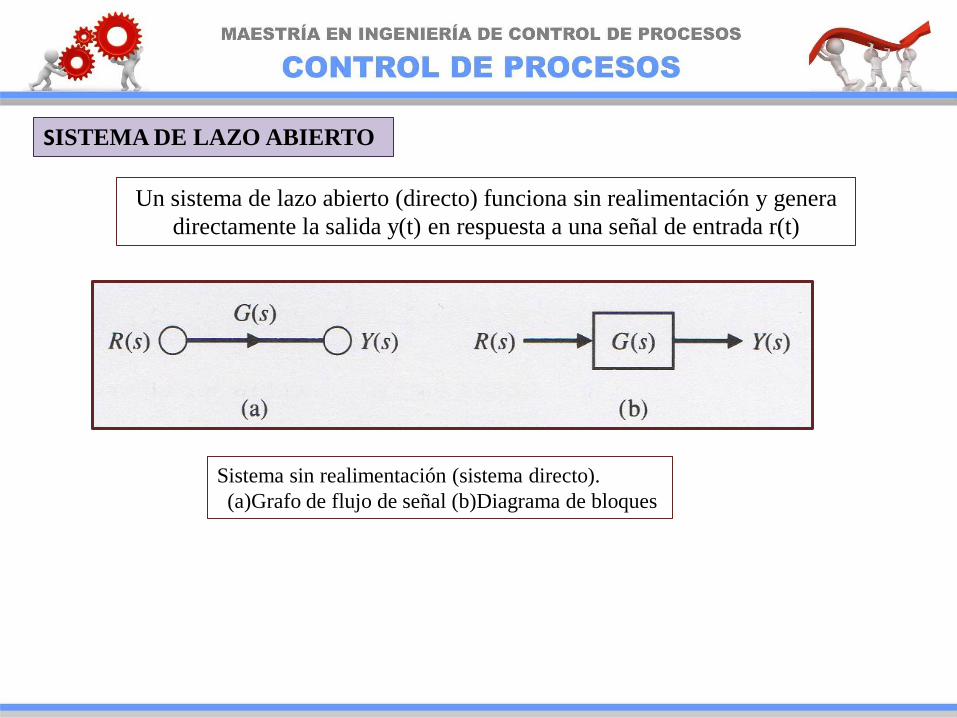
Un sistema de lazo abierto (directo) funciona sin realimentación y genera
directamente la salida y(t) en respuesta a una señal de entrada r(t)
Sistema sin realimentación (sistema directo).
(a)Grafo de flujo de señal (b)Diagrama de bloques
SISTEMA DE LAZO ABIERTO
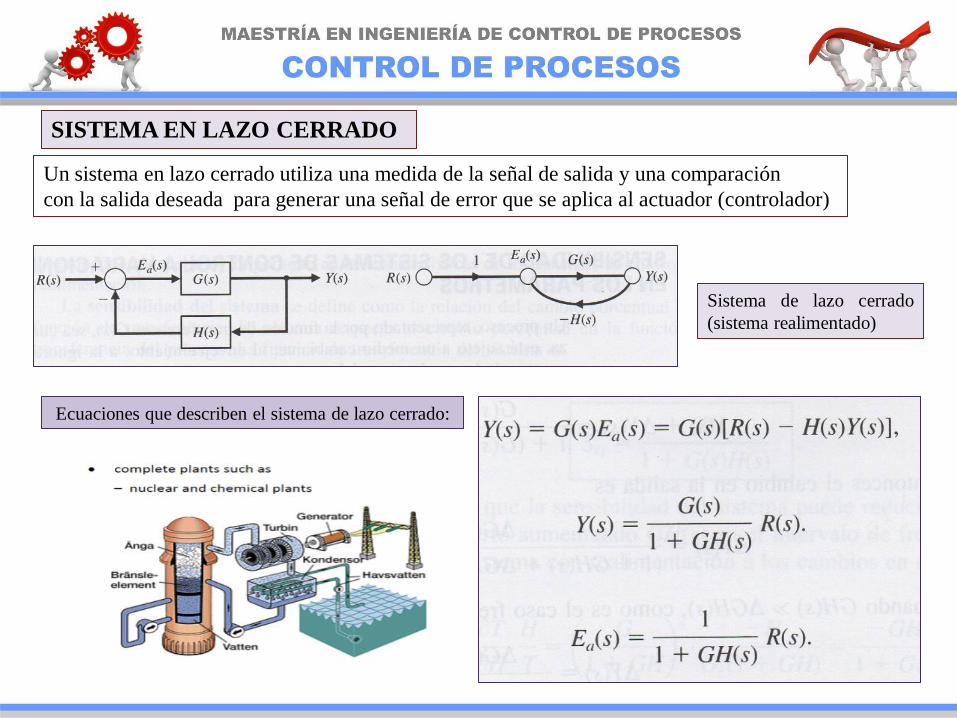
Un sistema en lazo cerrado utiliza una medida de la señal de salida y una comparación
con la salida deseada para generar una señal de error que se aplica al actuador (controlador)
SISTEMA EN LAZO CERRADO
Sistema de lazo cerrado
(sistema realimentado)
Ecuaciones que describen el sistema de lazo cerrado:
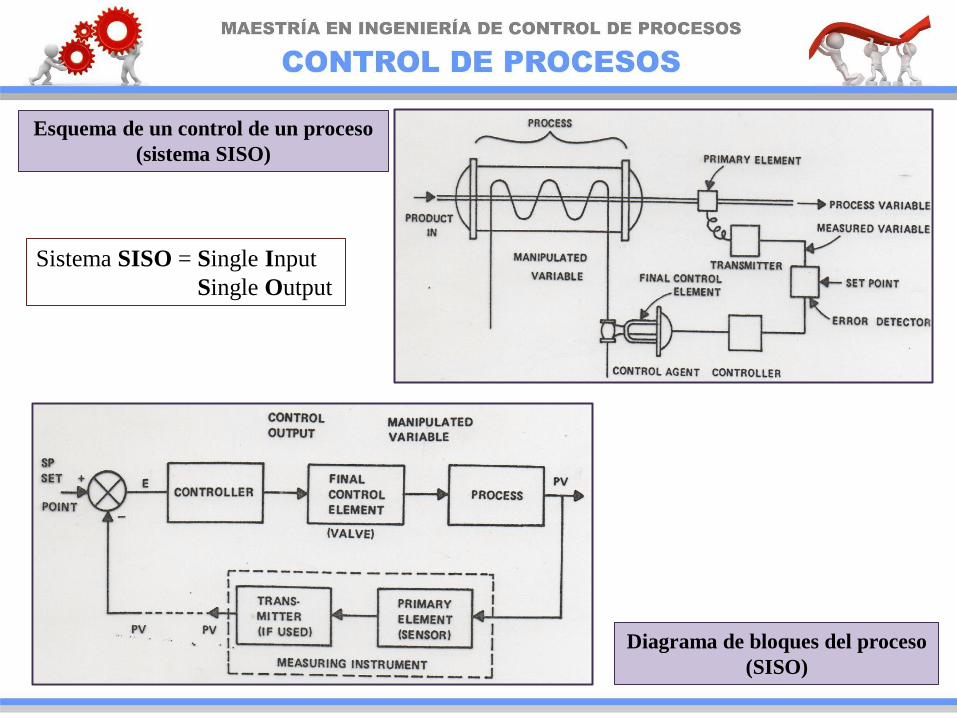
Esquema de un control de un proceso
(sistema SISO)
Diagrama de bloques del proceso
(SISO)
Sistema SISO = Single Input
Single Output
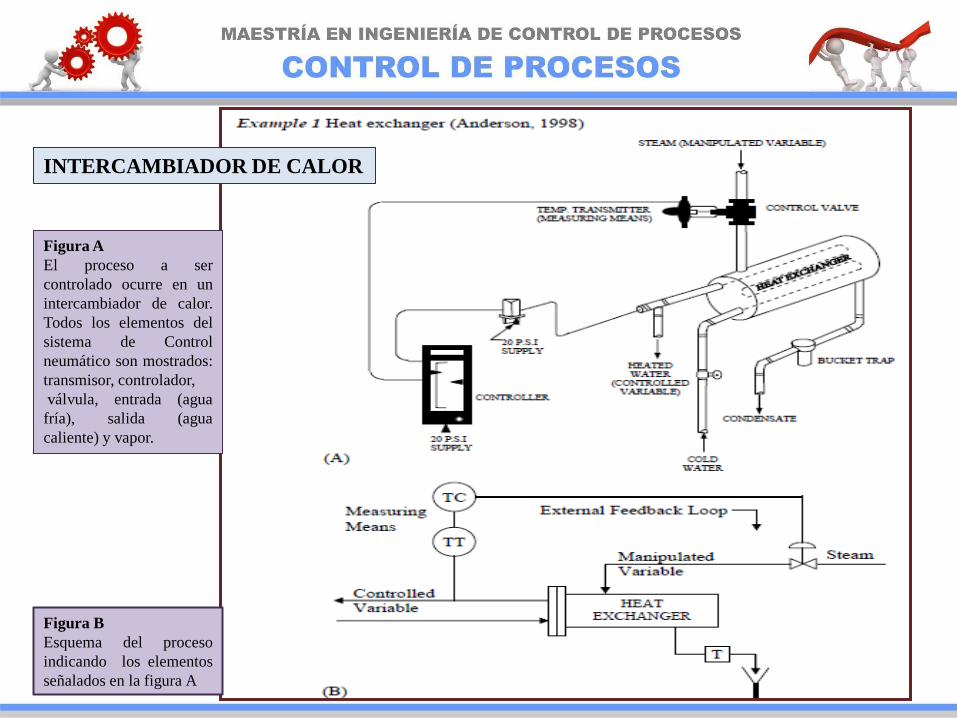
Figura A
El proceso a ser
controlado ocurre en un
intercambiador de calor.
Todos los elementos del
sistema de Control
neumático son mostrados:
transmisor, controlador,
válvula, entrada (agua
fría), salida (agua
caliente) y vapor.
Figura B
Esquema del proceso
indicando los elementos
señalados en la figura A
INTERCAMBIADOR DE CALOR
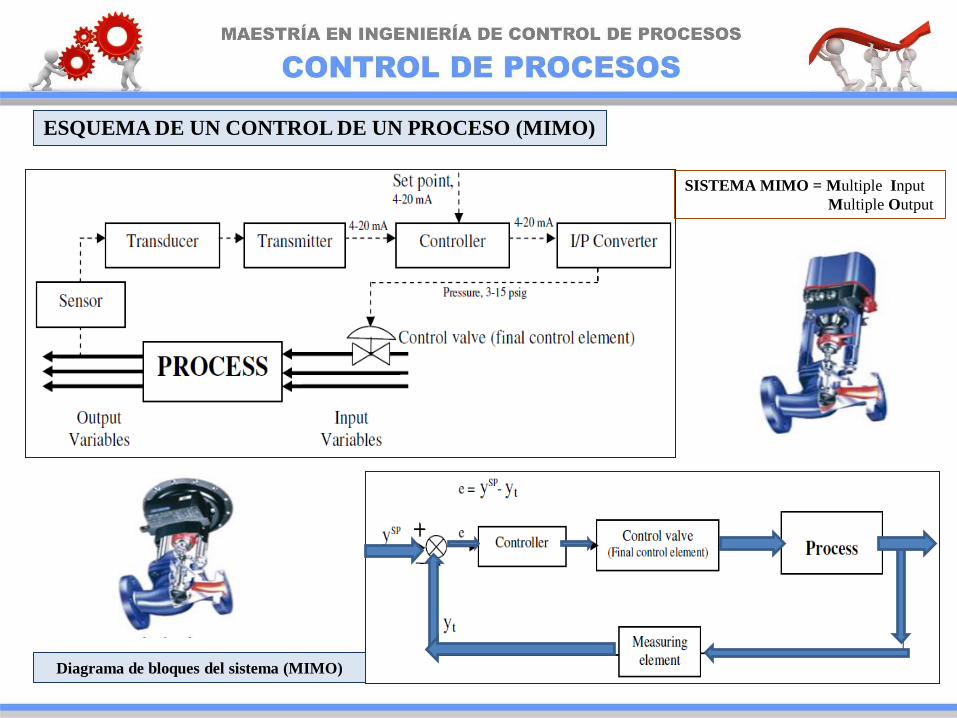
ESQUEMA DE UN CONTROL DE UN PROCESO (MIMO)
Diagrama de bloques del sistema (MIMO)
SISTEMA MIMO = Multiple Input
Multiple Output
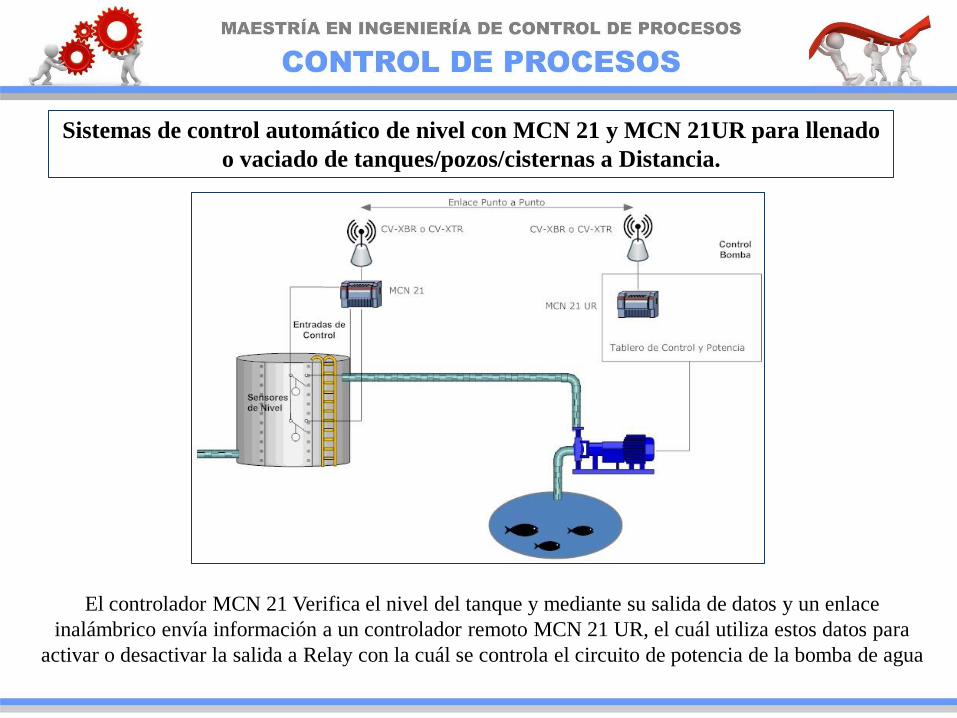
Sistemas de control automático de nivel con MCN 21 y MCN 21UR para llenado
o vaciado de tanques/pozos/cisternas a Distancia.
El controlador MCN 21 Verifica el nivel del tanque y mediante su salida de datos y un enlace
inalámbrico envía información a un controlador remoto MCN 21 UR, el cuál utiliza estos datos para
activar o desactivar la salida a Relay con la cuál se controla el circuito de potencia de la bomba de agua
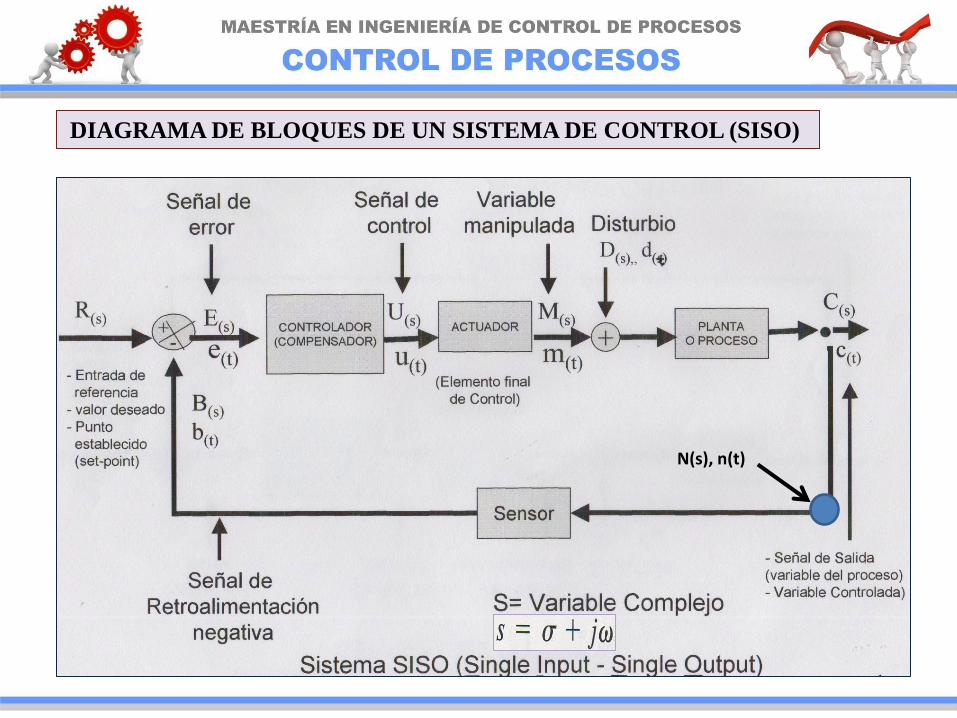
DIAGRAMA DE BLOQUES DE UN SISTEMA DE CONTROL (SISO)
N(s), n(t)
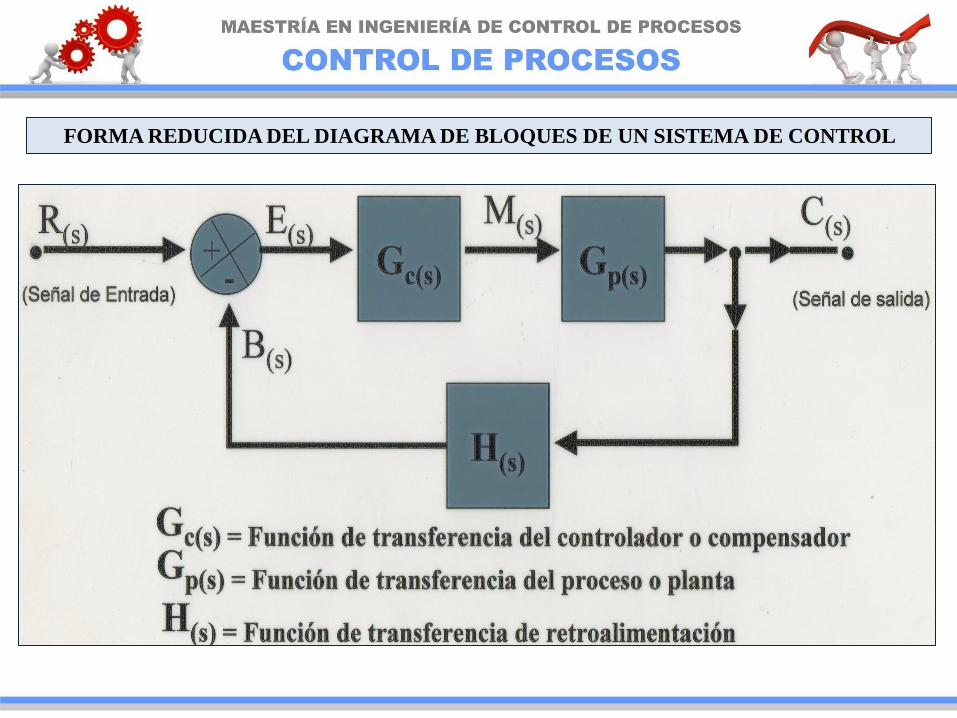
FORMA REDUCIDA DEL DIAGRAMA DE BLOQUES DE UN SISTEMA DE CONTROL
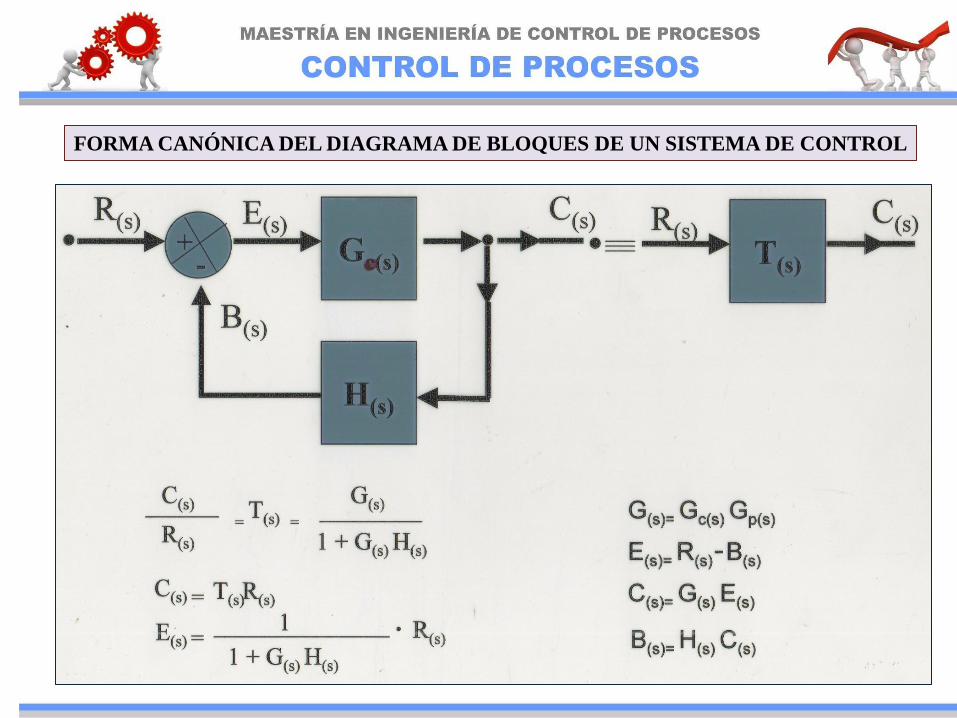
FORMA CANÓNICA DEL DIAGRAMA DE BLOQUES DE UN SISTEMA DE CONTROL
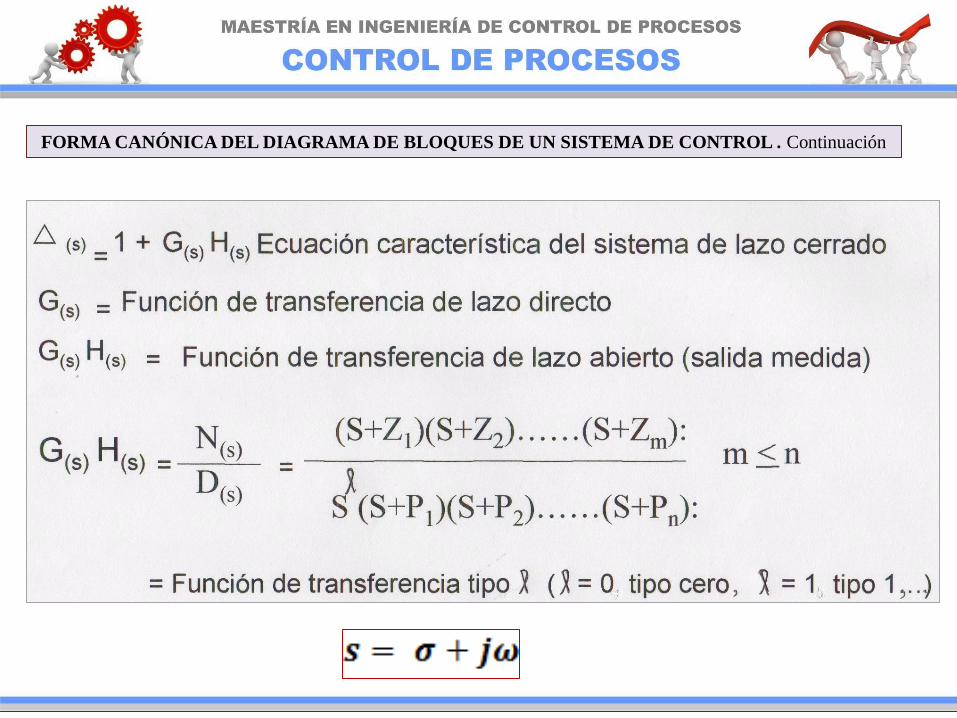
FORMA CANÓNICA DEL DIAGRAMA DE BLOQUES DE UN SISTEMA DE CONTROL . Continuación
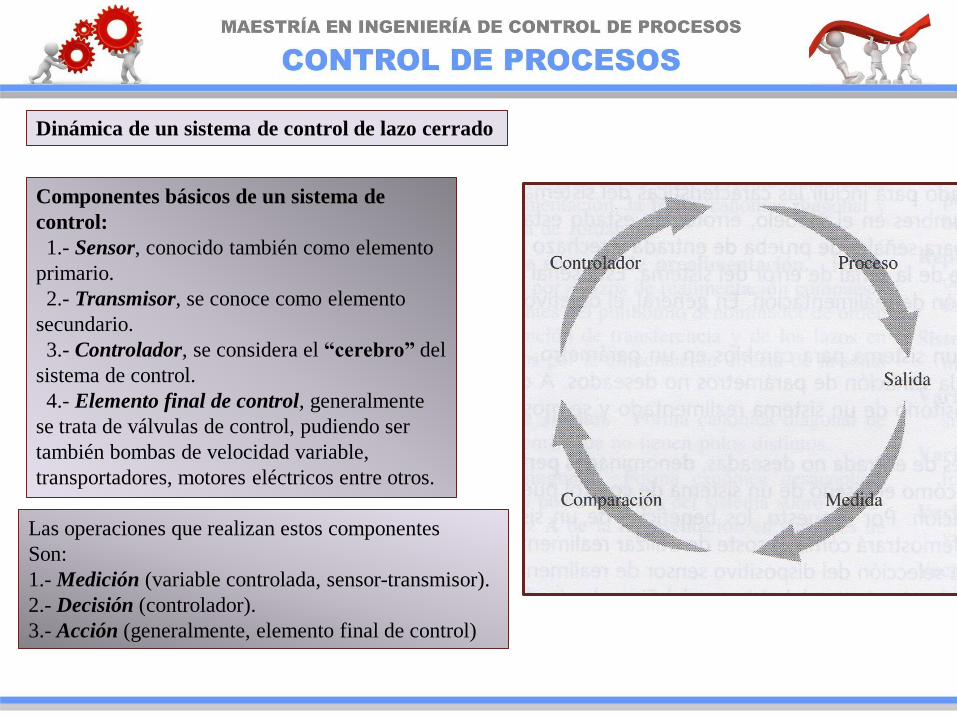
Dinámica de un sistema de control de lazo cerrado
Componentes básicos de un sistema de
control:
1.- Sensor, conocido también como elemento
primario.
2.- Transmisor, se conoce como elemento
secundario.
3.- Controlador, se considera el “cerebro” del
sistema de control.
4.- Elemento final de control, generalmente
se trata de válvulas de control, pudiendo ser
también bombas de velocidad variable,
transportadores, motores eléctricos entre otros.
Las operaciones que realizan estos componentes
Son:
1.- Medición (variable controlada, sensor-transmisor).
2.- Decisión (controlador).
3.- Acción (generalmente, elemento final de control)
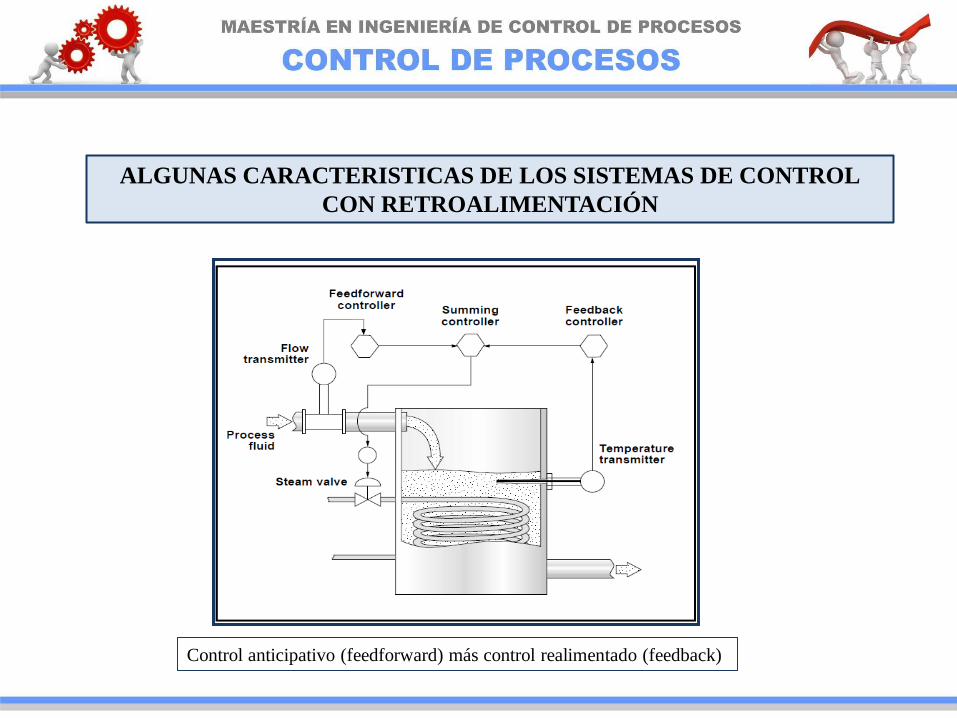
ALGUNAS CARACTERISTICAS DE LOS SISTEMAS DE CONTROL
CON RETROALIMENTACIÓN
Control anticipativo (feedforward) más control realimentado (feedback)
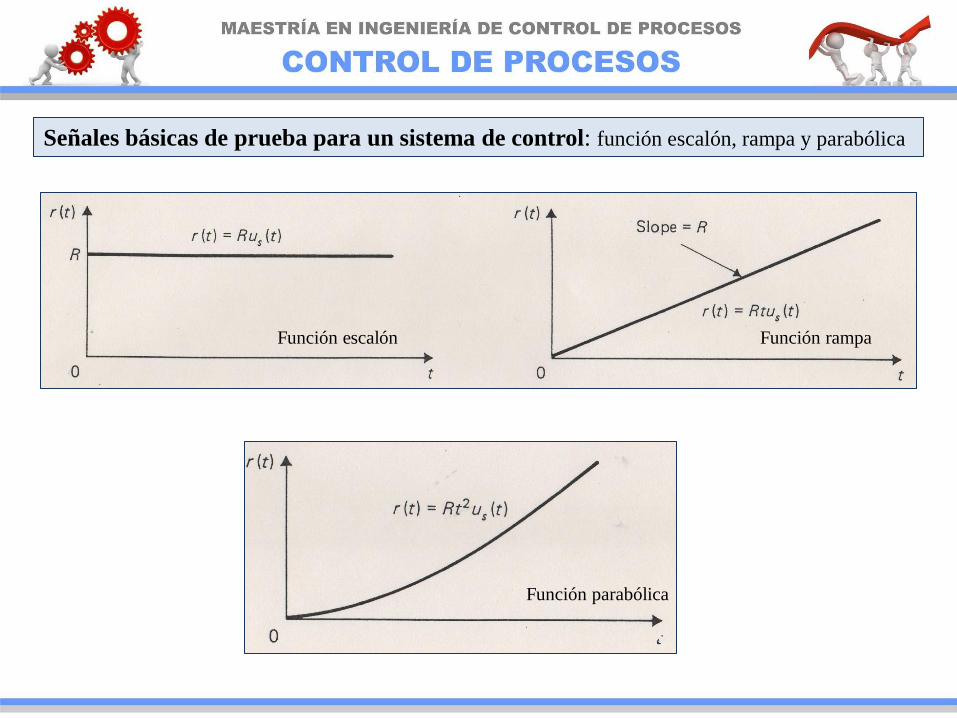
Señales básicas de prueba para un sistema de control: función escalón, rampa y parabólica
Función escalón Función rampa
Función parabólica
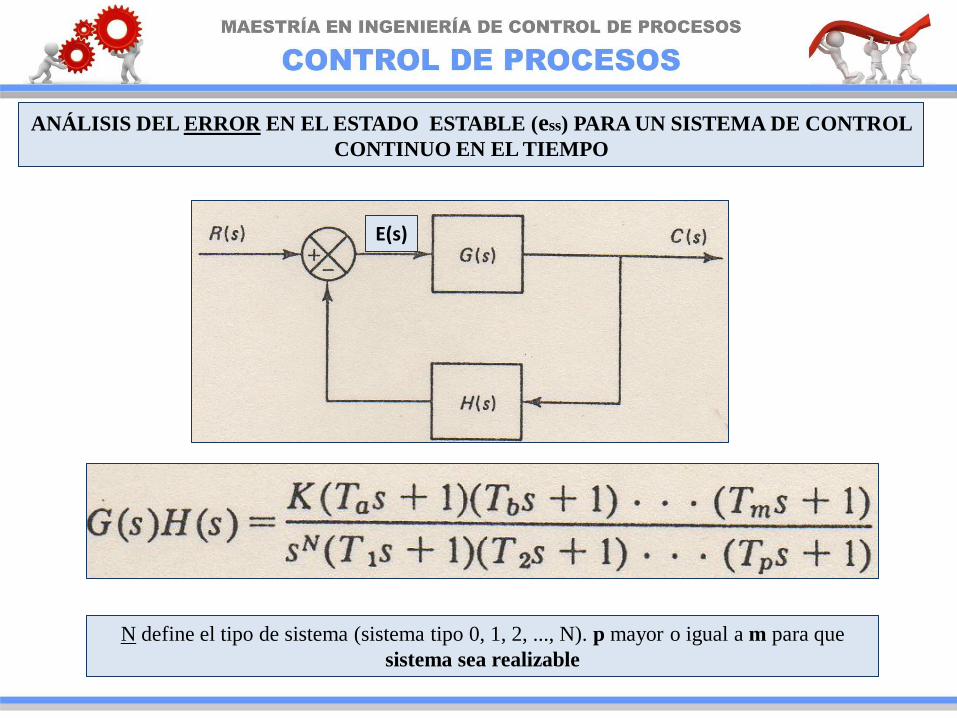
ANÁLISIS DEL ERROR EN EL ESTADO ESTABLE (ess) PARA UN SISTEMA DE CONTROL
CONTINUO EN EL TIEMPO
E(s)
N define el tipo de sistema (sistema tipo 0, 1, 2, ..., N). p mayor o igual a m para que
sistema sea realizable
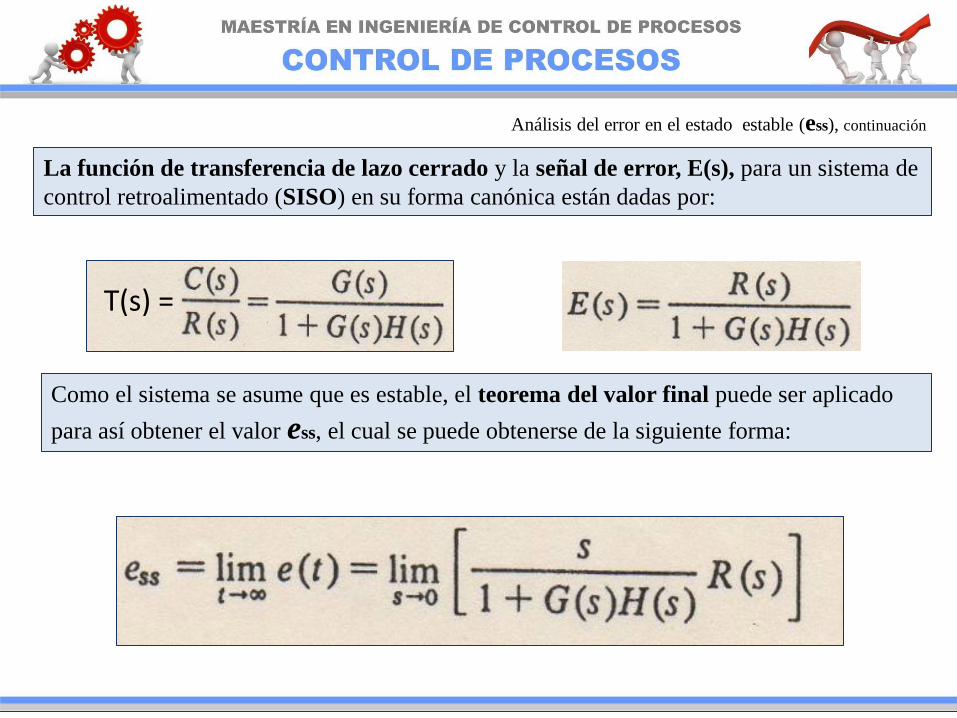
La función de transferencia de lazo cerrado y la señal de error, E(s), para un sistema de
control retroalimentado (SISO) en su forma canónica están dadas por:
T(s) =
Análisis del error en el estado estable (ess), continuación
Como el sistema se asume que es estable, el teorema del valor final puede ser aplicado
para así obtener el valor ess, el cual se puede obtenerse de la siguiente forma:
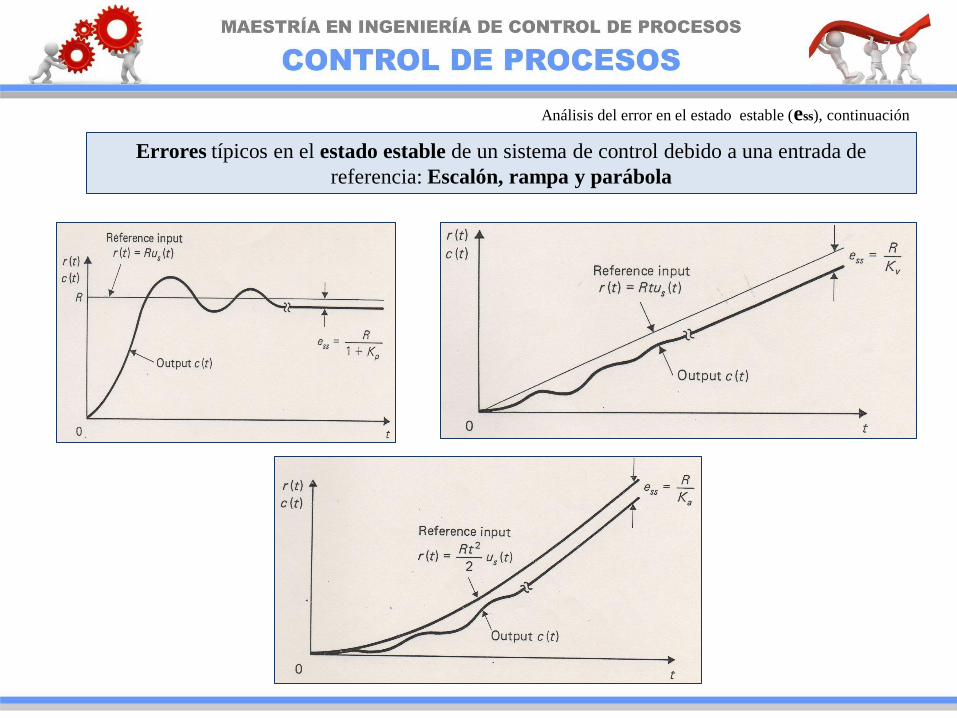
Errores típicos en el estado estable de un sistema de control debido a una entrada de
referencia: Escalón, rampa y parábola
Análisis del error en el estado estable (ess), continuación
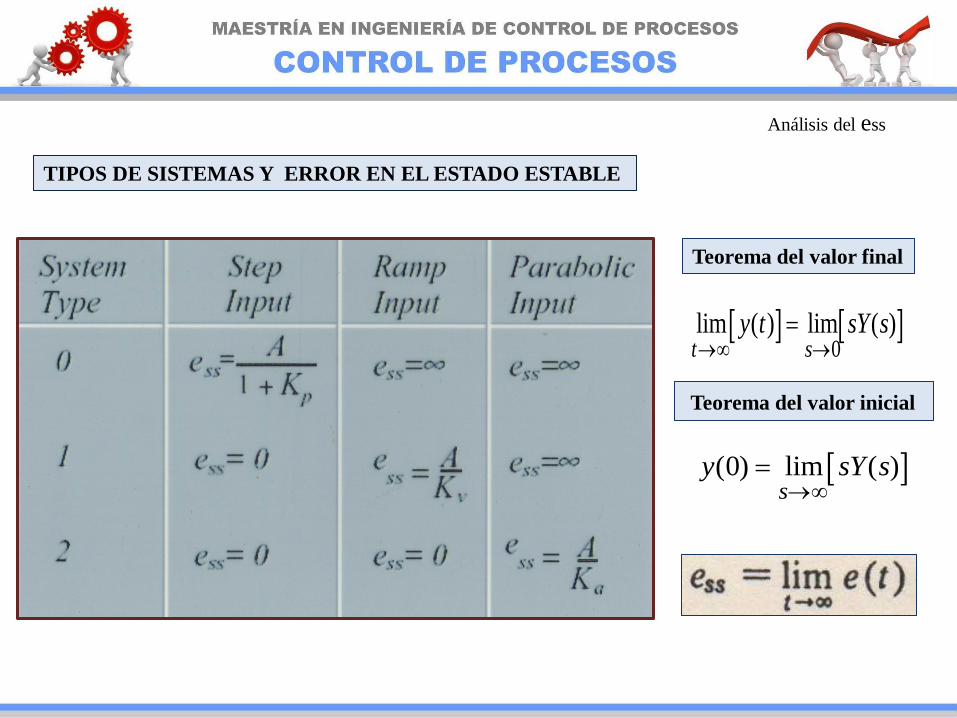
TIPOS DE SISTEMAS Y ERROR EN EL ESTADO ESTABLE
lim ( ) lim ( )t s
y t sY s
0
Teorema del valor final
Teorema del valor inicial
y sY ss
( ) lim ( )0
Análisis del ess
Ver: Sistemas de control moderno de R. Dorf y R. Bishop 10ma Edición Págs 194, 195 … ,
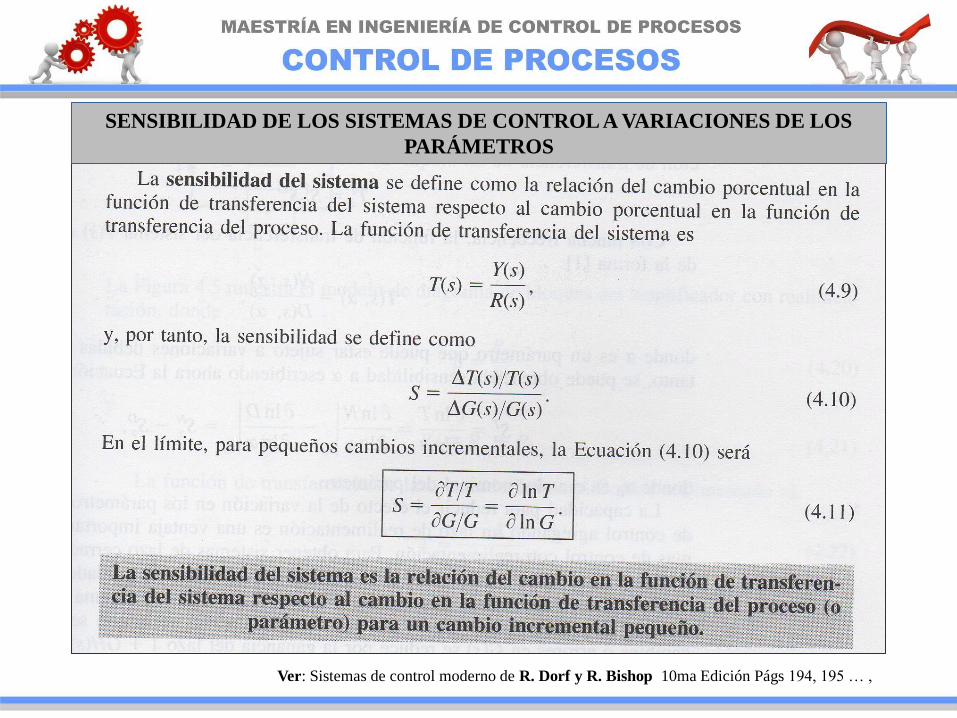
SENSIBILIDAD DE LOS SISTEMAS DE CONTROL A VARIACIONES DE LOS
PARÁMETROS
Ver: Sistemas de control moderno de R. Dorf y R. Bishop 10ma Edición Pág 194, …
,
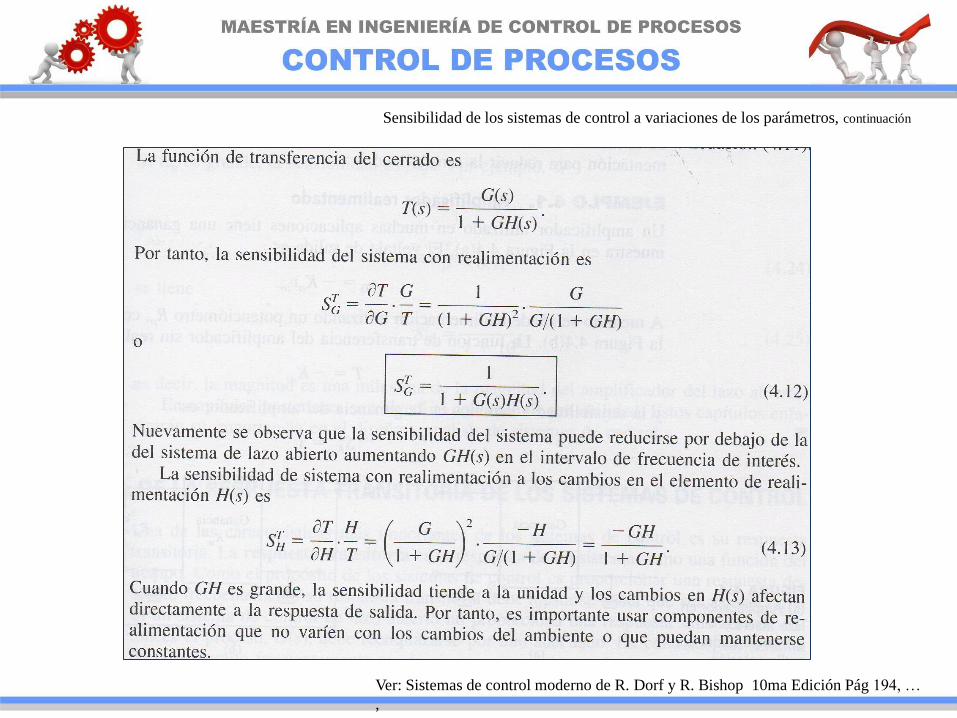
Sensibilidad de los sistemas de control a variaciones de los parámetros, continuación

COMPORTAMIENTO DE LOS SISTEMAS DE
CONTROL DE PRIMER ORDEN

Comportamiento de los sistemas de control de 1r orden con retroalimentación
Sistema de primer orden
1)(
,
)(
)(
00
1
00
1
01
s
KsG
Ka
b
a
a
tfa
by
dt
dy
a
a
tbfyadt
dya
p
p
Donde
G(s) = Y(s)/F(s)
τ: constante de tiempo
Kp: ganancia en el estado estable
Ejemplo
1
1G s
s
21 1( 1)
1 1
jG j j
j j
2 2
0
1
1
arctan
as , 90
G
Haciendo s = jw se tiene que:
2 2 2 2
1
1 1G j j
Donde
Sea
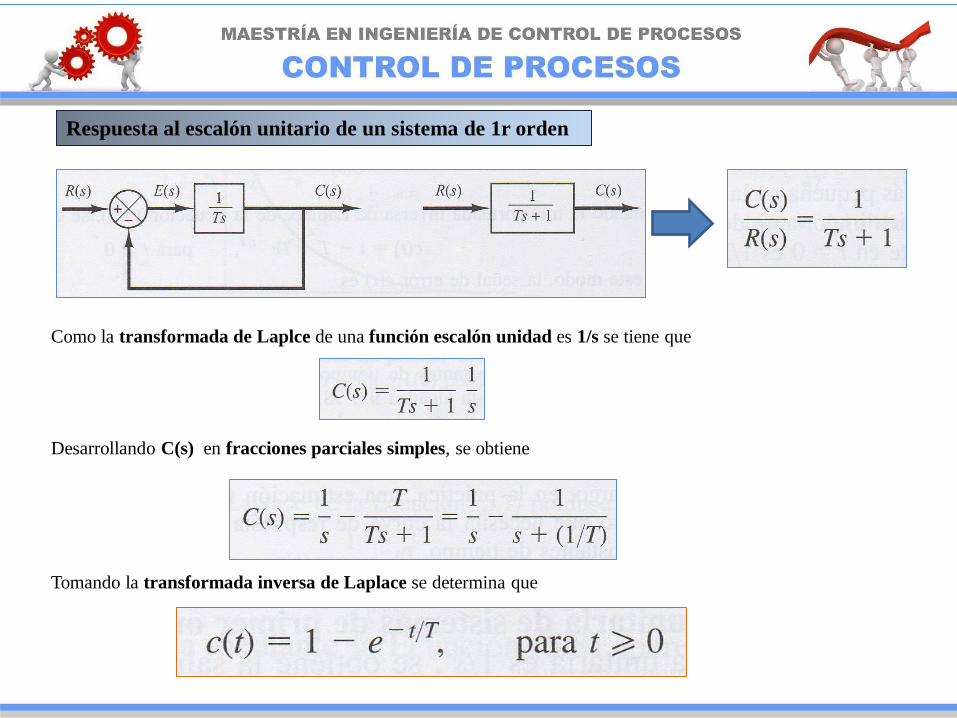
Respuesta al escalón unitario de un sistema de 1r orden
Como la transformada de Laplce de una función escalón unidad es 1/s se tiene que
Desarrollando C(s) en fracciones parciales simples, se obtiene
Tomando la transformada inversa de Laplace se determina que
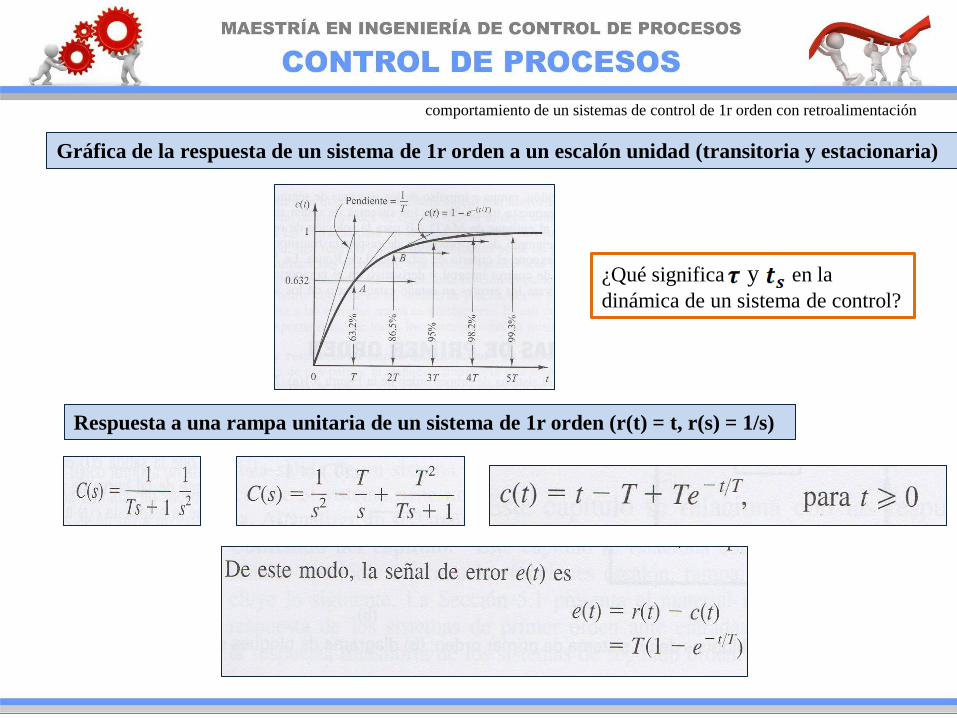
comportamiento de un sistemas de control de 1r orden con retroalimentación
Gráfica de la respuesta de un sistema de 1r orden a un escalón unidad (transitoria y estacionaria)
Respuesta a una rampa unitaria de un sistema de 1r orden (r(t) = t, r(s) = 1/s)
¿Qué significa y en la
dinámica de un sistema de control?
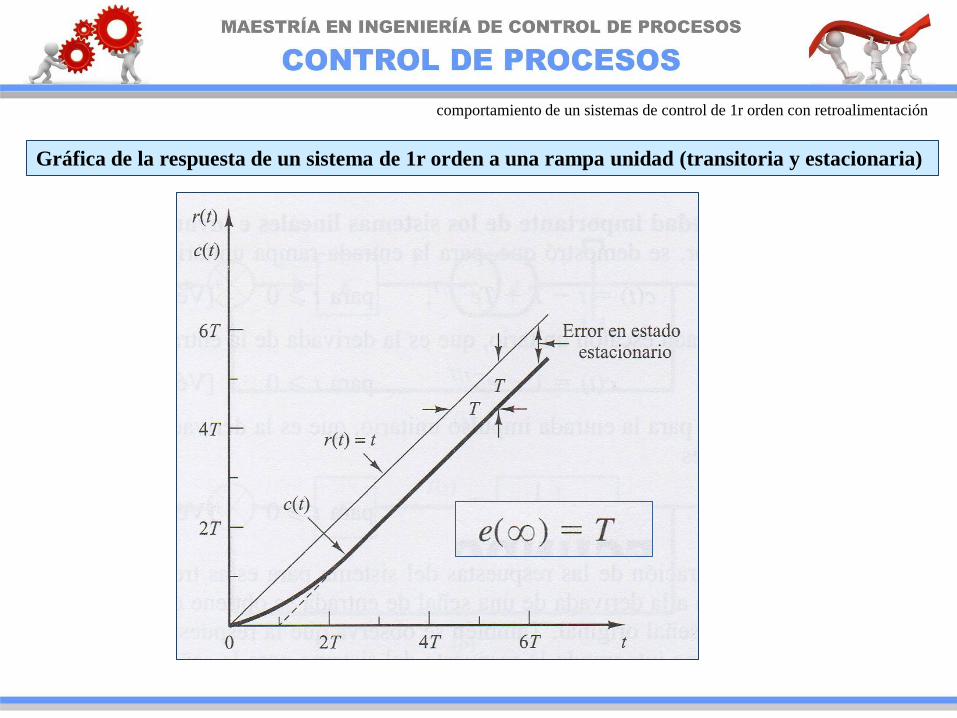
comportamiento de un sistemas de control de 1r orden con retroalimentación
Gráfica de la respuesta de un sistema de 1r orden a una rampa unidad (transitoria y estacionaria)
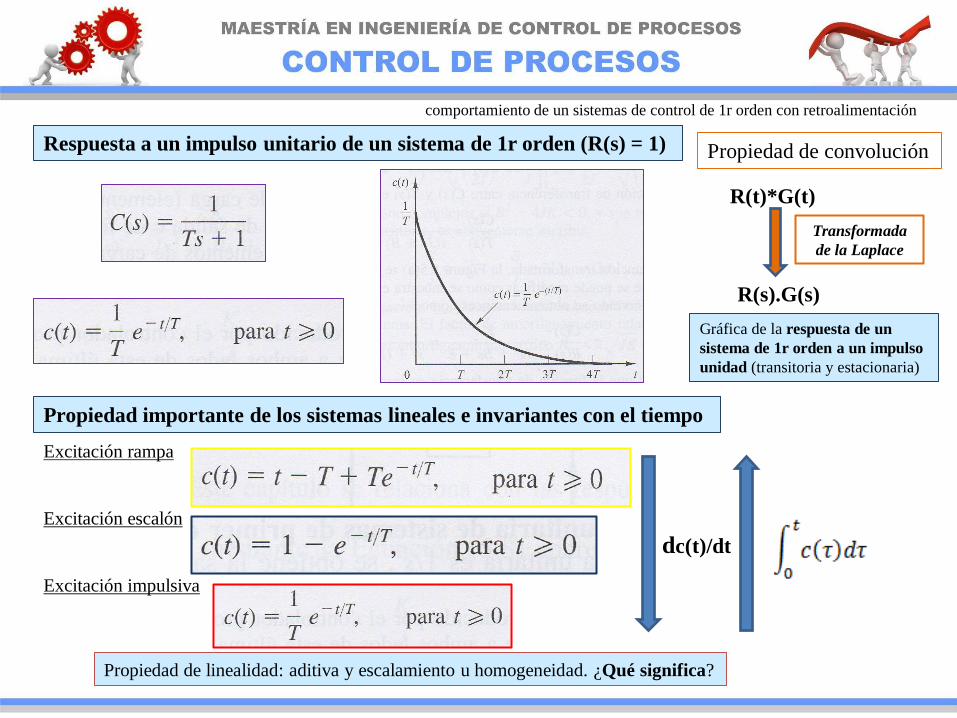
Respuesta a un impulso unitario de un sistema de 1r orden (R(s) = 1)
Gráfica de la respuesta de un
sistema de 1r orden a un impulso
unidad (transitoria y estacionaria)
comportamiento de un sistemas de control de 1r orden con retroalimentación
Propiedad importante de los sistemas lineales e invariantes con el tiempo
Excitación rampa
Excitación escalón
Excitación impulsiva
dc(t)/dt
Propiedad de convolución
R(t)*G(t)
R(s).G(s)
Transformada
de la Laplace
Propiedad de linealidad: aditiva y escalamiento u homogeneidad. ¿Qué significa?
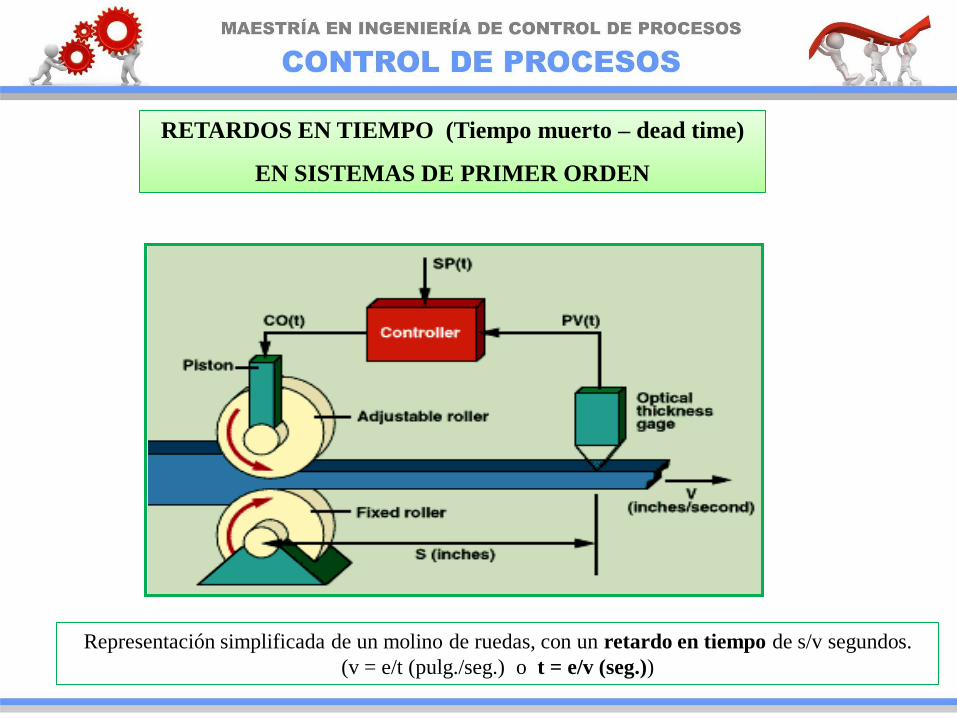
RETARDOS EN TIEMPO (Tiempo muerto – dead time)
EN SISTEMAS DE PRIMER ORDEN
Representación simplificada de un molino de ruedas, con un retardo en tiempo de s/v segundos.
(v = e/t (pulg./seg.) o t = e/v (seg.))
Comportamiento de los sistemas de control con retroalimentación
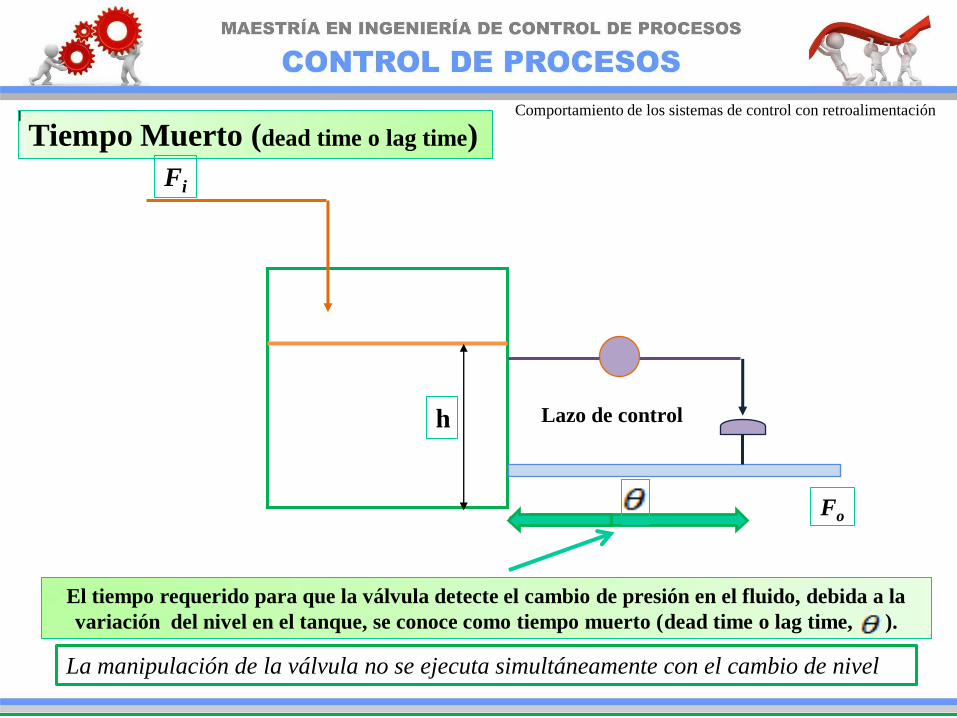
El tiempo requerido para que la válvula detecte el cambio de presión en el fluido, debida a la
variación del nivel en el tanque, se conoce como tiempo muerto (dead time o lag time, ).
La manipulación de la válvula no se ejecuta simultáneamente con el cambio de nivel
Tiempo Muerto (dead time o lag time)
h Lazo de control
Fi
Fo
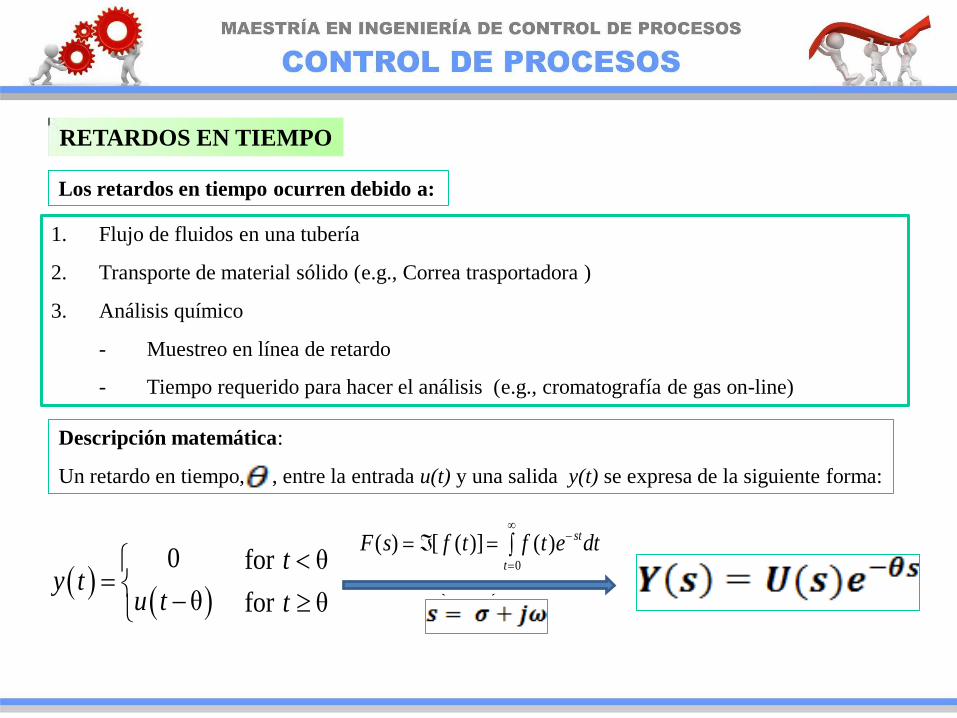
RETARDOS EN TIEMPO
Los retardos en tiempo ocurren debido a:
1. Flujo de fluidos en una tubería
2. Transporte de material sólido (e.g., Correa trasportadora )
3. Análisis químico
- Muestreo en línea de retardo
- Tiempo requerido para hacer el análisis (e.g., cromatografía de gas on-line)
Descripción matemática:
Un retardo en tiempo, , entre la entrada u(t) y una salida y(t) se expresa de la siguiente forma:
0 for θ(6-27)
θ for θ
ty t
u t t
F s f t f t e dtst
t
( ) [ ( )] ( )
0
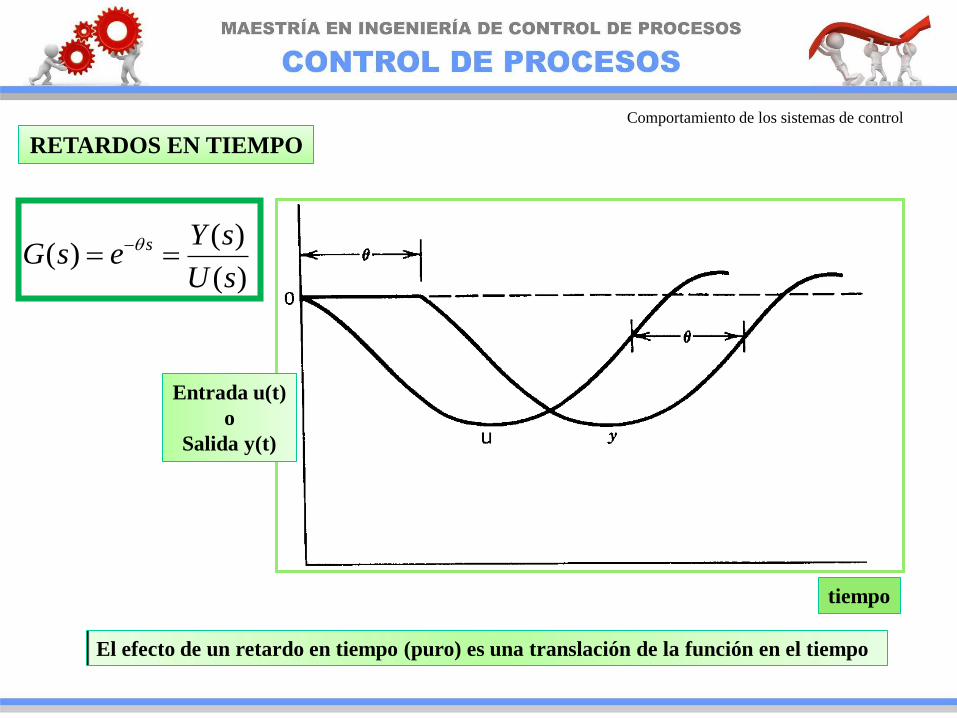
Comportamiento de los sistemas de control
( )( )
( )
s Y sG s e
U s
El efecto de un retardo en tiempo (puro) es una translación de la función en el tiempo
Entrada u(t)
o
Salida y(t)
tiempo
RETARDOS EN TIEMPO
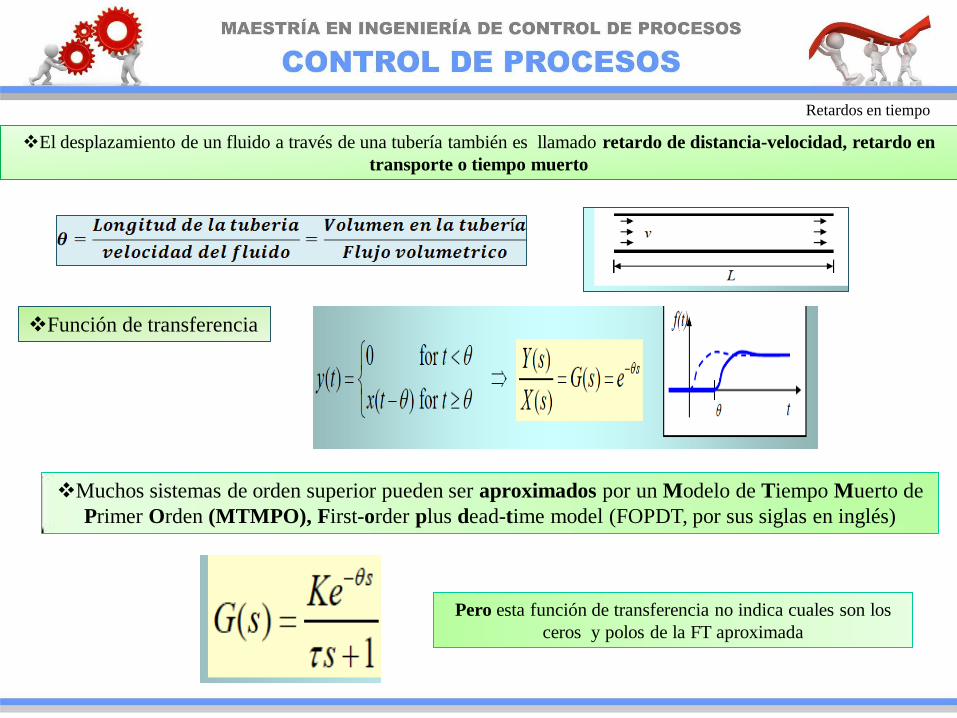
Pero esta función de transferencia no indica cuales son los
ceros y polos de la FT aproximada
Función de transferencia
Muchos sistemas de orden superior pueden ser aproximados por un Modelo de Tiempo Muerto de
Primer Orden (MTMPO), First-order plus dead-time model (FOPDT, por sus siglas en inglés)
El desplazamiento de un fluido a través de una tubería también es llamado retardo de distancia-velocidad, retardo en
transporte o tiempo muerto
Retardos en tiempo
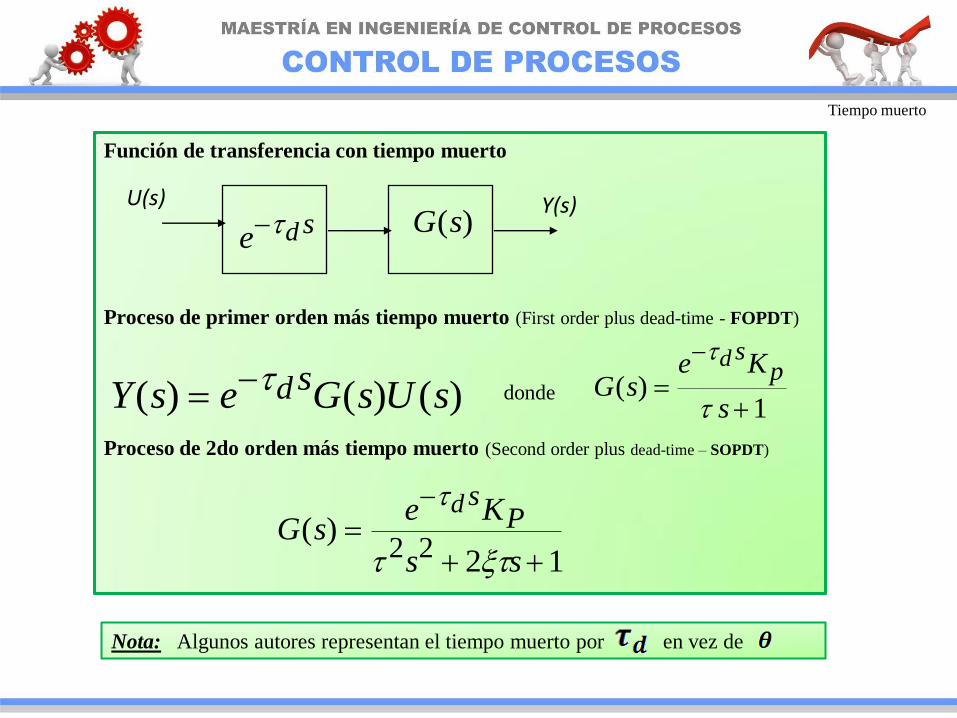
Función de transferencia con tiempo muerto
Proceso de primer orden más tiempo muerto (First order plus dead-time - FOPDT)
Proceso de 2do orden más tiempo muerto (Second order plus dead-time – SOPDT)
Y s e G s U sd s( ) ( ) ( )
U(s)
e d s G s( )
G se K
s
d sp
( )
1
G se K
s s
d sP( )
2 2 2 1
Y(s)
Tiempo muerto
Nota: Algunos autores representan el tiempo muerto por en vez de
donde
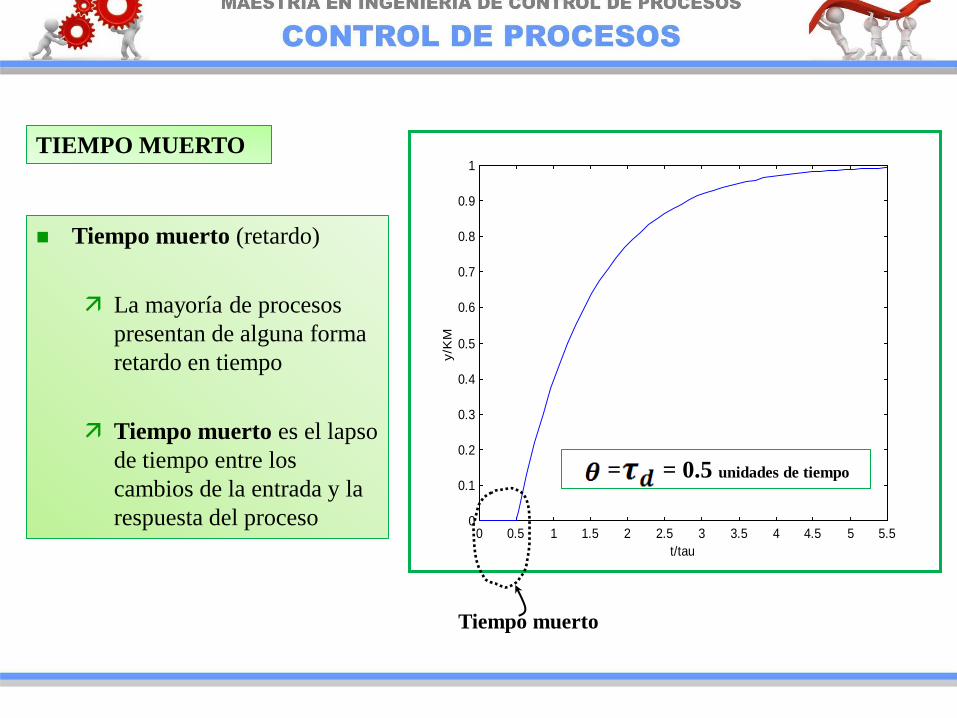
Tiempo muerto (retardo)
La mayoría de procesos
presentan de alguna forma
retardo en tiempo
Tiempo muerto es el lapso
de tiempo entre los
cambios de la entrada y la
respuesta del proceso 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
y/K
M
t/tau
TIEMPO MUERTO
Tiempo muerto
= = 0.5 unidades de tiempo

Padé de 1er orden:
21
21
ST
ST
e ST
APROXIMACIÓN DE PADÉ
La aproximación de Padé de la función exponencial permite hacer esta más manejable (racional).
Recuerde que:
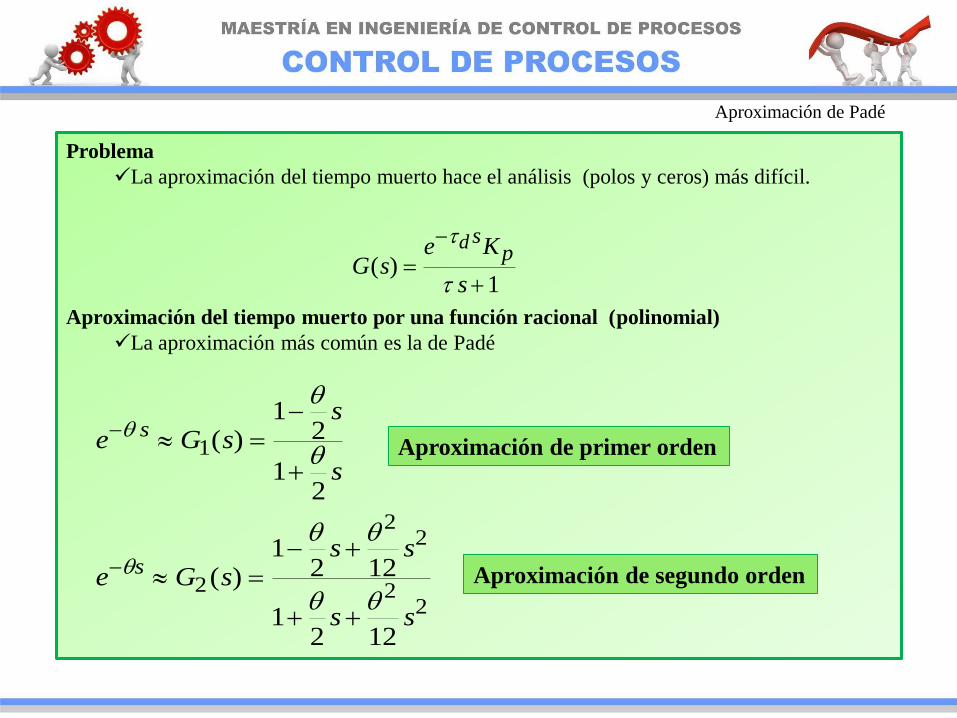
Problema
La aproximación del tiempo muerto hace el análisis (polos y ceros) más difícil.
Aproximación del tiempo muerto por una función racional (polinomial)
La aproximación más común es la de Padé
G se K
s
d sp
( )
1
e G ss
s
e G ss s
s s
s
s
1
2
22
22
12
12
12 12
12 12
( )
( )
Aproximación de Padé
Aproximación de primer orden
Aproximación de segundo orden
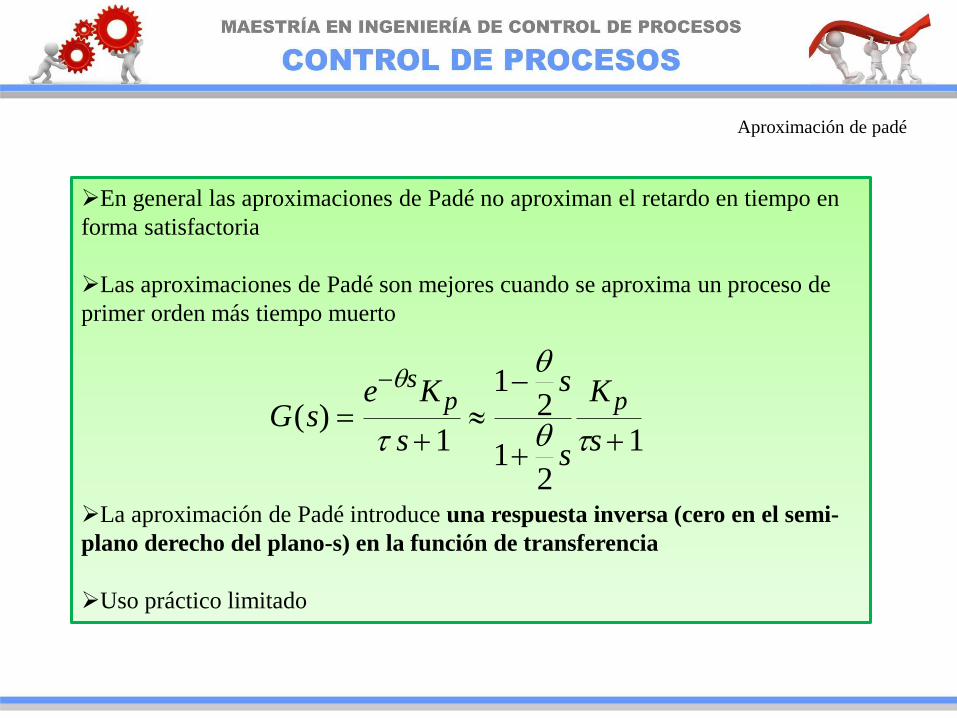
En general las aproximaciones de Padé no aproximan el retardo en tiempo en
forma satisfactoria
Las aproximaciones de Padé son mejores cuando se aproxima un proceso de
primer orden más tiempo muerto
La aproximación de Padé introduce una respuesta inversa (cero en el semi-
plano derecho del plano-s) en la función de transferencia
Uso práctico limitado
G se K
s
s
s
K
s
sp p
( )
1
12
12
1
Aproximación de padé
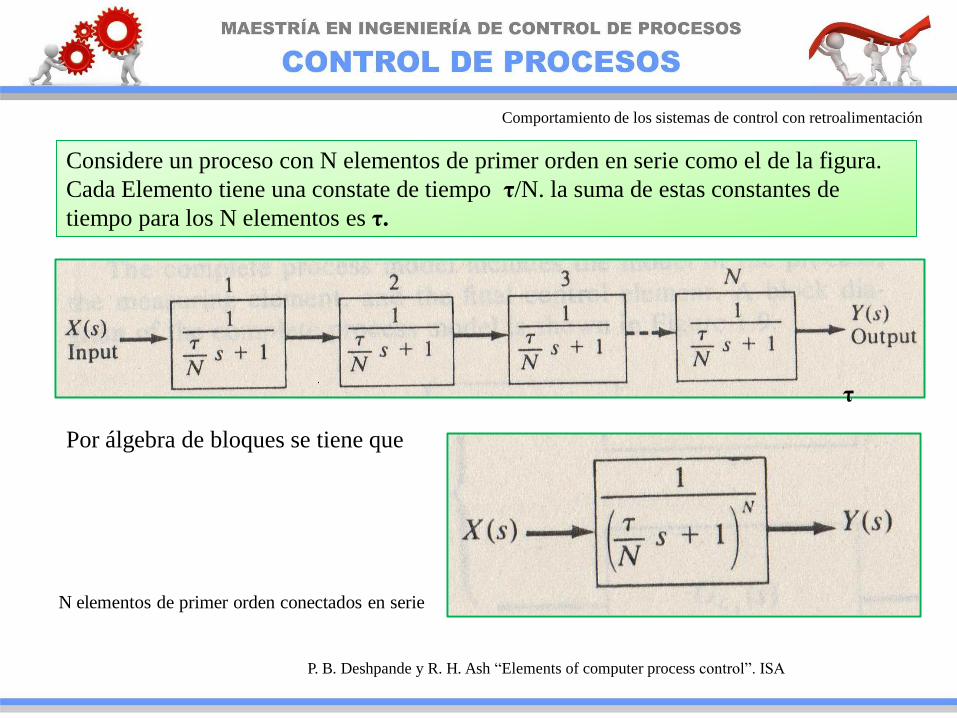
Comportamiento de los sistemas de control con retroalimentación
τ
Considere un proceso con N elementos de primer orden en serie como el de la figura.
Cada Elemento tiene una constate de tiempo τ/N. la suma de estas constantes de
tiempo para los N elementos es τ.
Por álgebra de bloques se tiene que
N elementos de primer orden conectados en serie
P. B. Deshpande y R. H. Ash “Elements of computer process control”. ISA
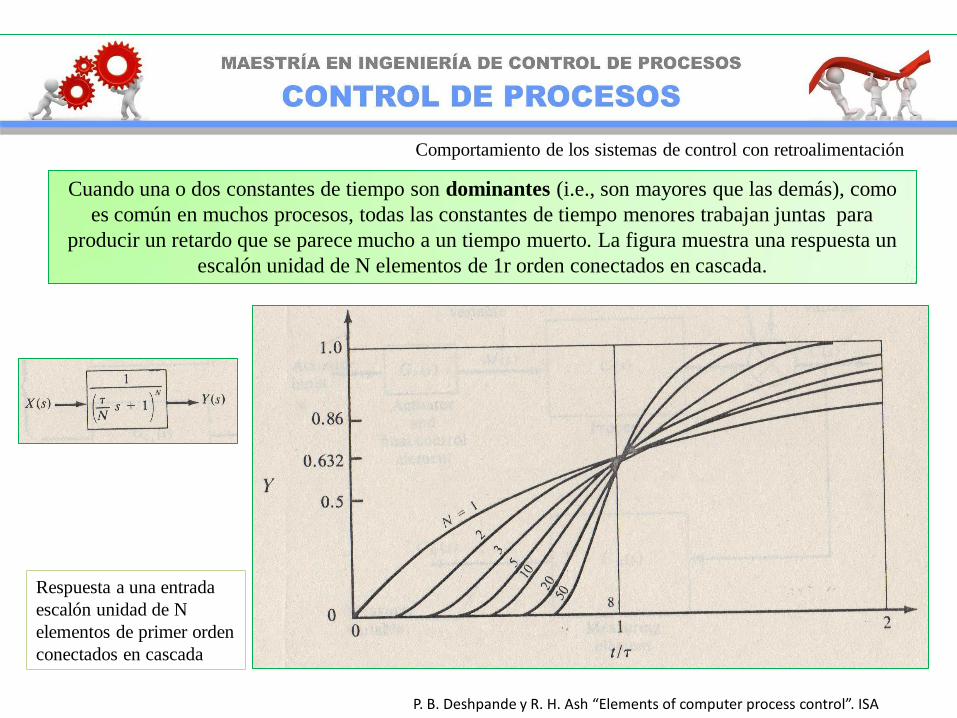
Respuesta a una entrada
escalón unidad de N
elementos de primer orden
conectados en cascada
Cuando una o dos constantes de tiempo son dominantes (i.e., son mayores que las demás), como
es común en muchos procesos, todas las constantes de tiempo menores trabajan juntas para
producir un retardo que se parece mucho a un tiempo muerto. La figura muestra una respuesta un
escalón unidad de N elementos de 1r orden conectados en cascada.
P. B. Deshpande y R. H. Ash “Elements of computer process control”. ISA
Comportamiento de los sistemas de control con retroalimentación
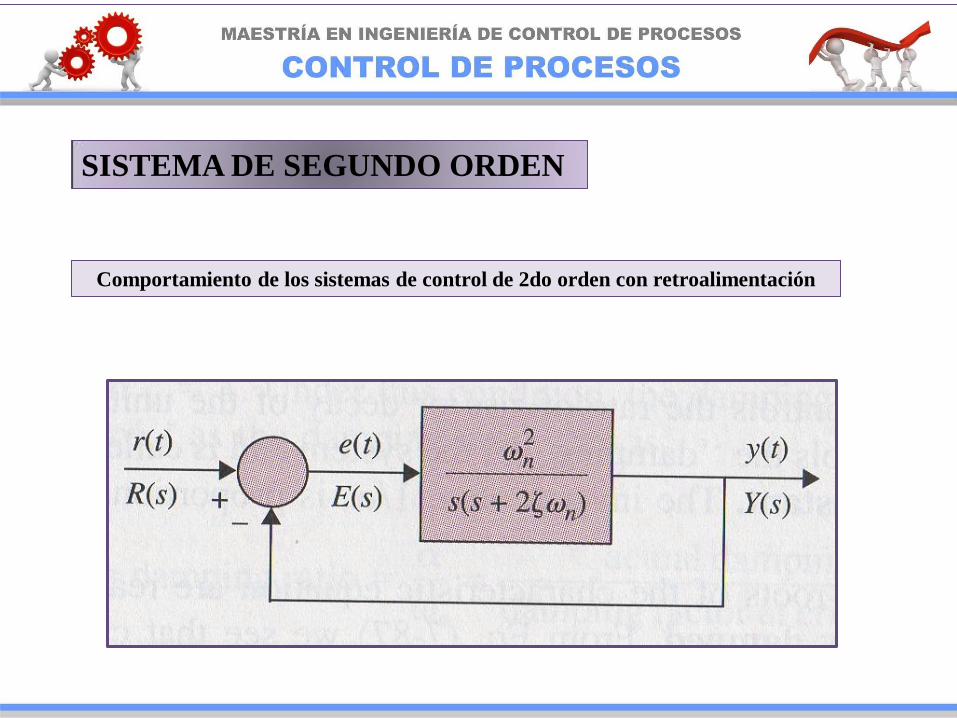
SISTEMA DE SEGUNDO ORDEN
Comportamiento de los sistemas de control de 2do orden con retroalimentación
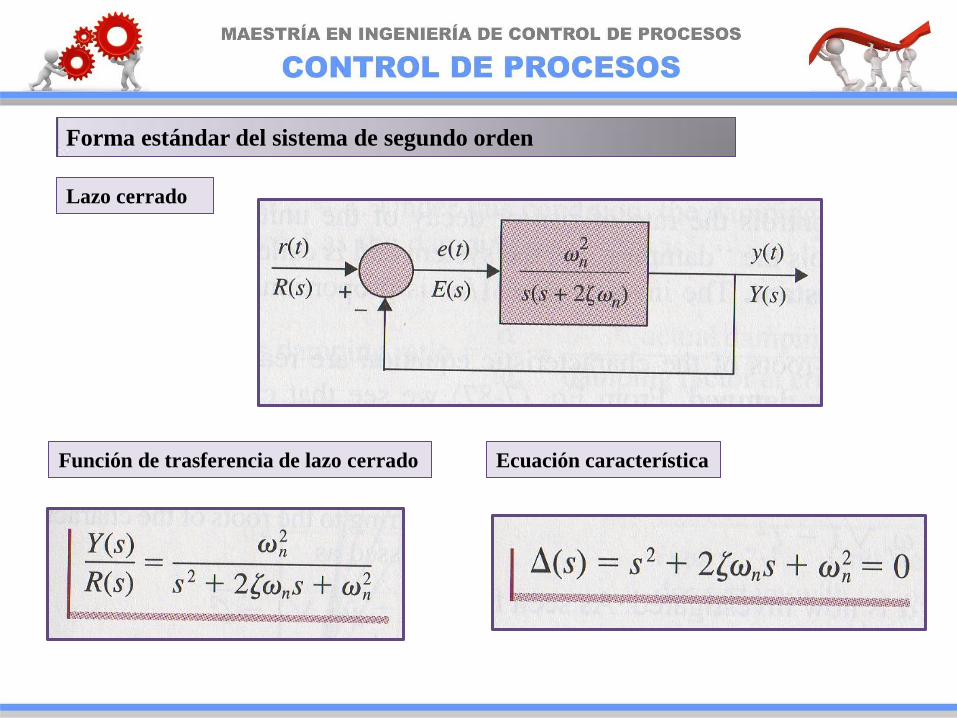
Forma estándar del sistema de segundo orden
Lazo cerrado
Función de trasferencia de lazo cerrado Ecuación característica
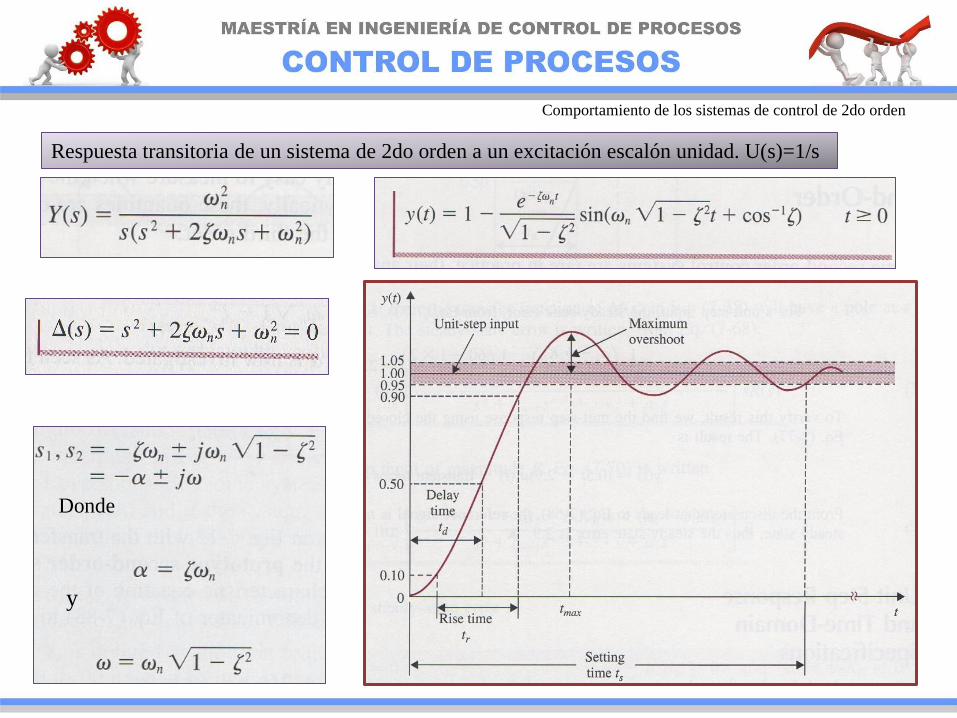
Comportamiento de los sistemas de control de 2do orden
Respuesta transitoria de un sistema de 2do orden a un excitación escalón unidad. U(s)=1/s
Donde
y
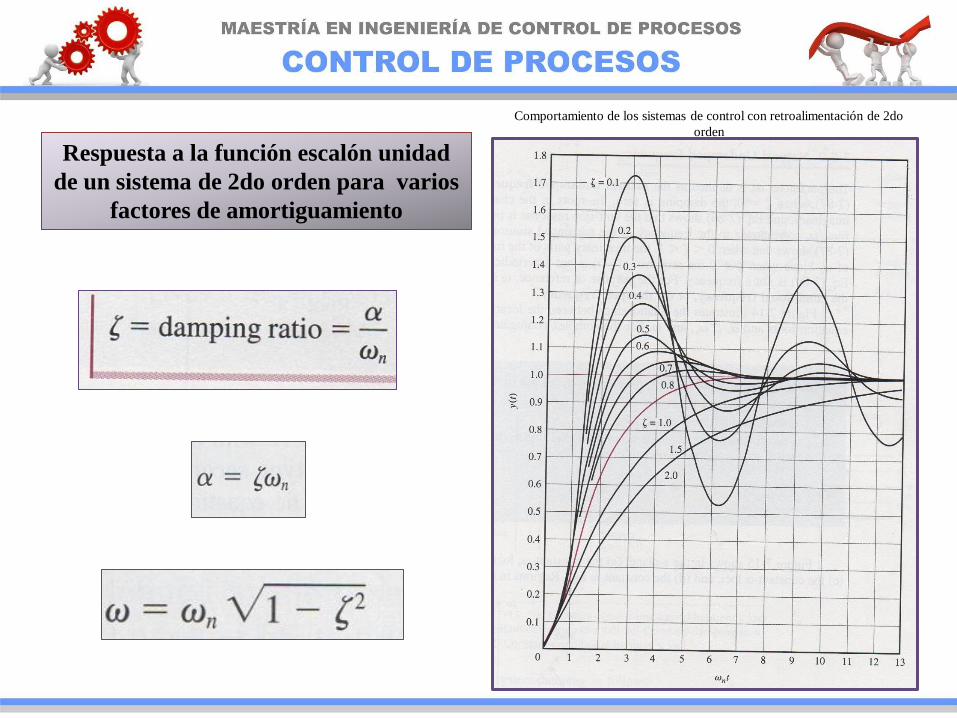
Comportamiento de los sistemas de control con retroalimentación de 2do
orden
Respuesta a la función escalón unidad
de un sistema de 2do orden para varios
factores de amortiguamiento
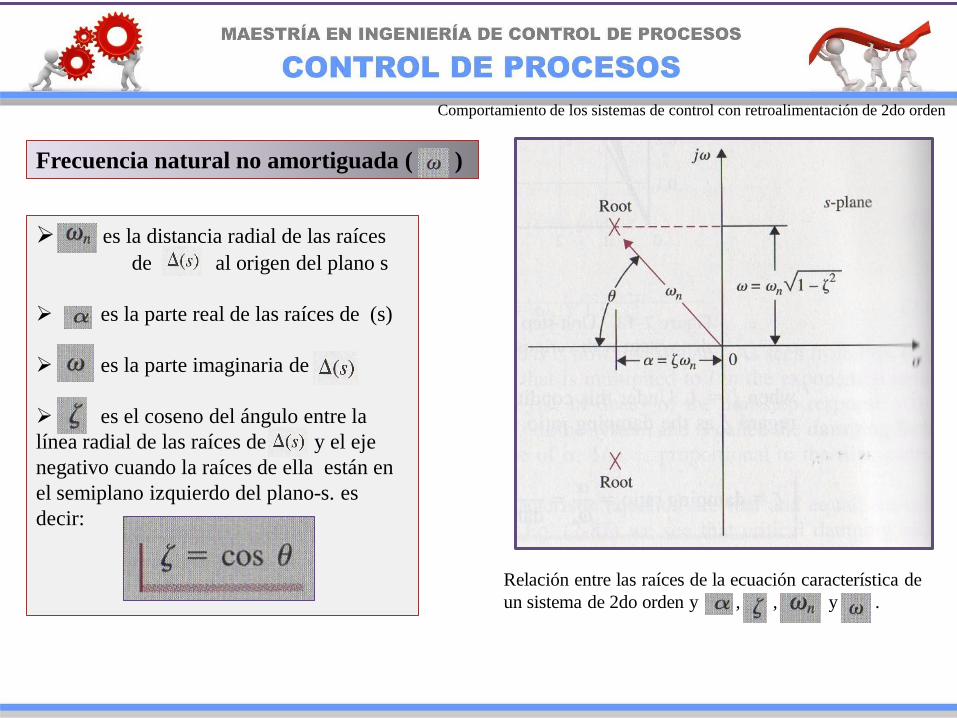
Comportamiento de los sistemas de control con retroalimentación de 2do orden
es la distancia radial de las raíces
de al origen del plano s
es la parte real de las raíces de (s)
es la parte imaginaria de
es el coseno del ángulo entre la
línea radial de las raíces de y el eje
negativo cuando la raíces de ella están en
el semiplano izquierdo del plano-s. es
decir:
Frecuencia natural no amortiguada ( )
Relación entre las raíces de la ecuación característica de
un sistema de 2do orden y , , y .

Comportamiento de los sistemas de control de 2do orden
Frecuencia natural no amortiguada ( )
Subamortiguado
Críticamente amortiguado (oscilatorio)
Sobreamortiguado
No amortiguado (oscilatorio)
Amortiguamiento negativo
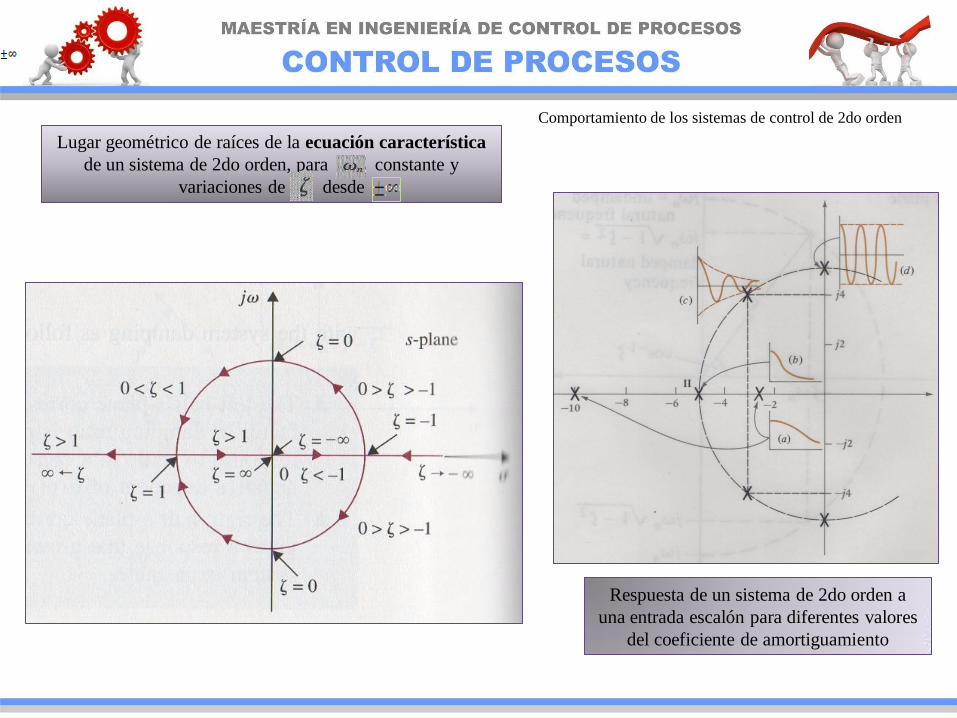
Comportamiento de los sistemas de control de 2do orden
Lugar geométrico de raíces de la ecuación característica
de un sistema de 2do orden, para constante y
variaciones de desde
Respuesta de un sistema de 2do orden a
una entrada escalón para diferentes valores
del coeficiente de amortiguamiento
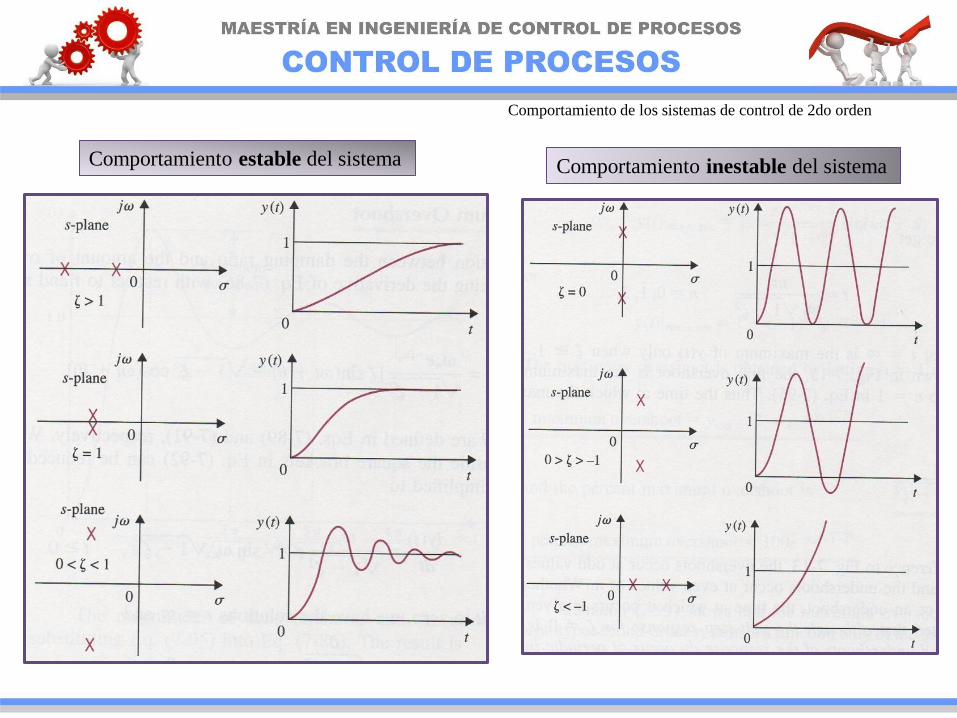
Comportamiento de los sistemas de control de 2do orden
Comportamiento estable del sistema Comportamiento inestable del sistema
Comportamiento de los sistemas de control de 2do orden, continuación
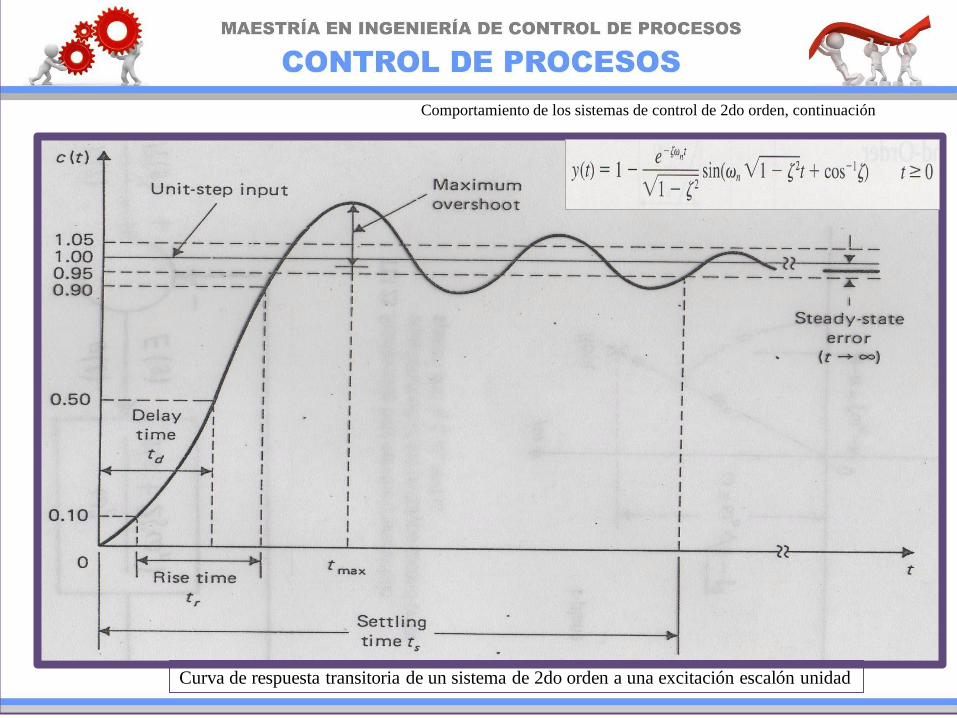
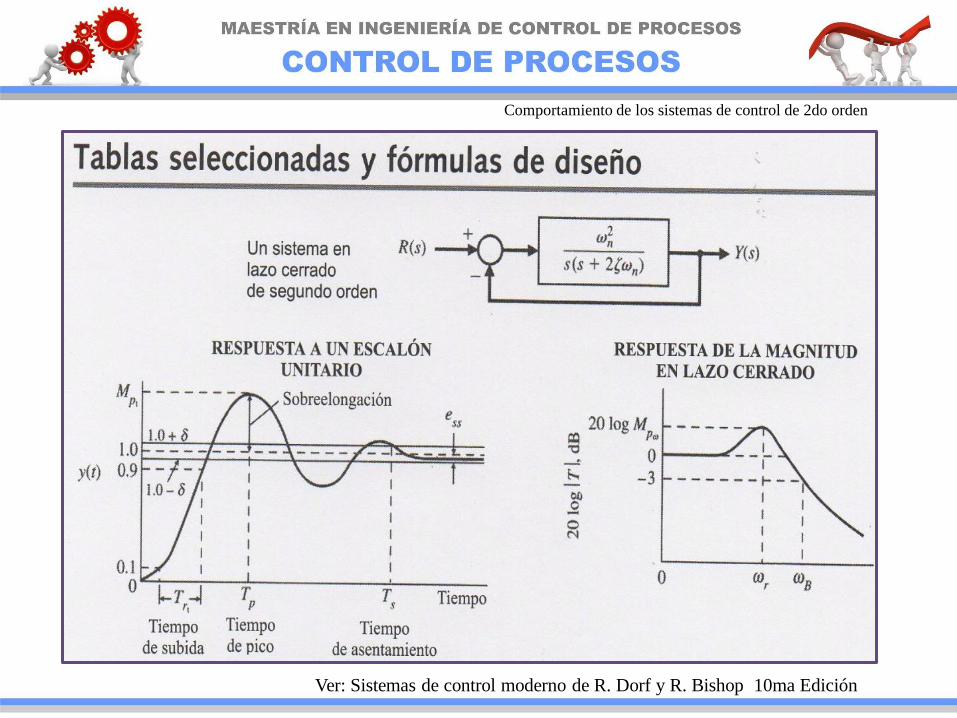
Curva de respuesta transitoria de un sistema de 2do orden a una excitación escalón unidad
Comportamiento de los sistemas de control de 2do orden
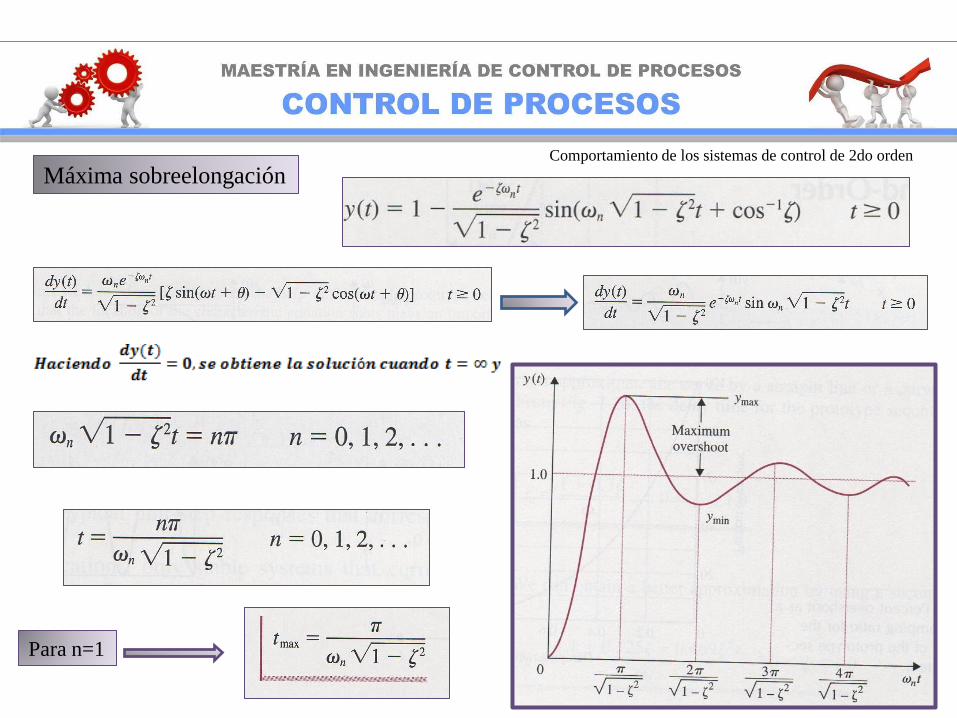
Máxima sobreelongación
Para n=1

Comportamiento de los sistemas de control de 2do orden
Magnitud de las sobreelongaciones (sobrepasos)
Evaluando en
Para n = 1
Máxima
sobreelongación
Porcentaje máx.
sobreelongación
Se tiene que
Porcentaje de sobeelongación en función del
factor de amortiguamiento relativo para la
respuesta al escalón unidad para un sistema de
2do orden

Comportamiento de los sistemas de control de 2do orden
No es fácil determinar una expresión analítica para calcular el tiempo de retardo (td), tiempo
de levantamiento (tr) y el tiempo de establecimiento o asentamiento (ts).
Evaluando y(t) = 0.5 y conociendo los demás parámetros, se puede calcular td usando la ecuación
Tiempo de retardo (td)
Una forma más sencilla es graficar
versus coef. de amortiguamiento.
De la gráfica se tiene que:
Tiempo de retardo normalizado contra el coeficiente de
amortiguamiento para un sistema de 2do orden
Comportamiento de los sistemas de control de 2do orden
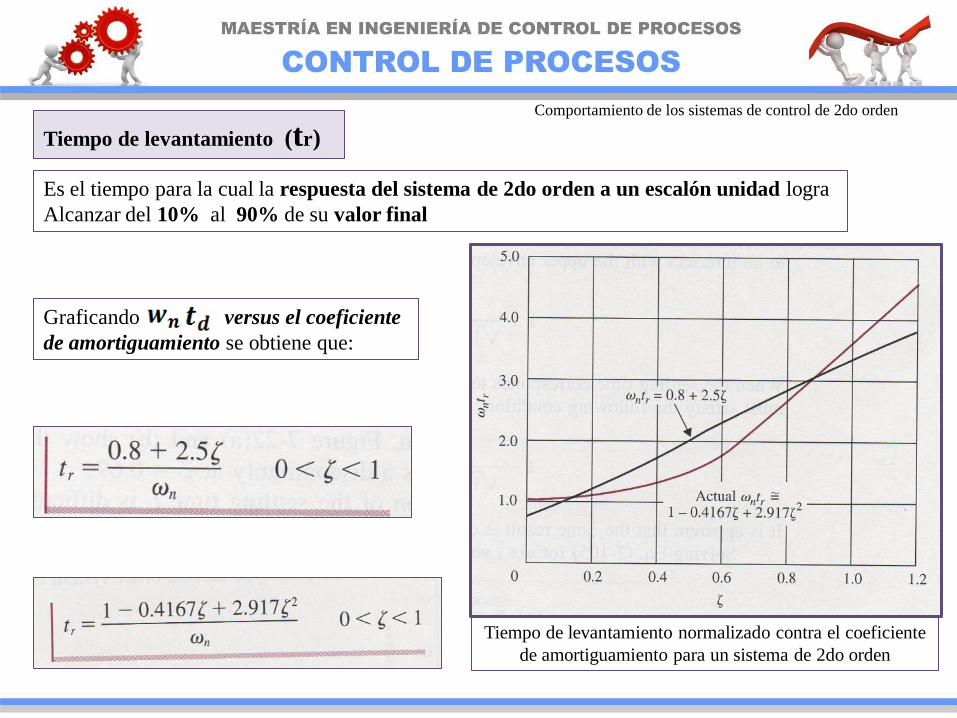
Tiempo de levantamiento (tr)
Es el tiempo para la cual la respuesta del sistema de 2do orden a un escalón unidad logra
Alcanzar del 10% al 90% de su valor final
Graficando versus el coeficiente
de amortiguamiento se obtiene que:
Tiempo de levantamiento normalizado contra el coeficiente
de amortiguamiento para un sistema de 2do orden
Comportamiento de los sistemas de control de 2do orden
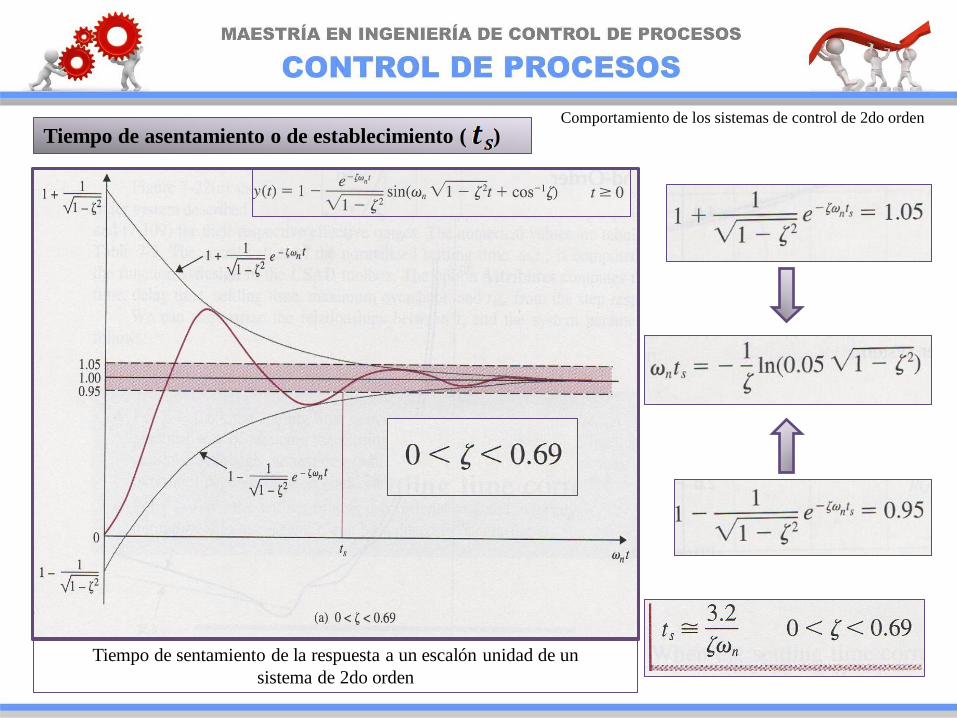
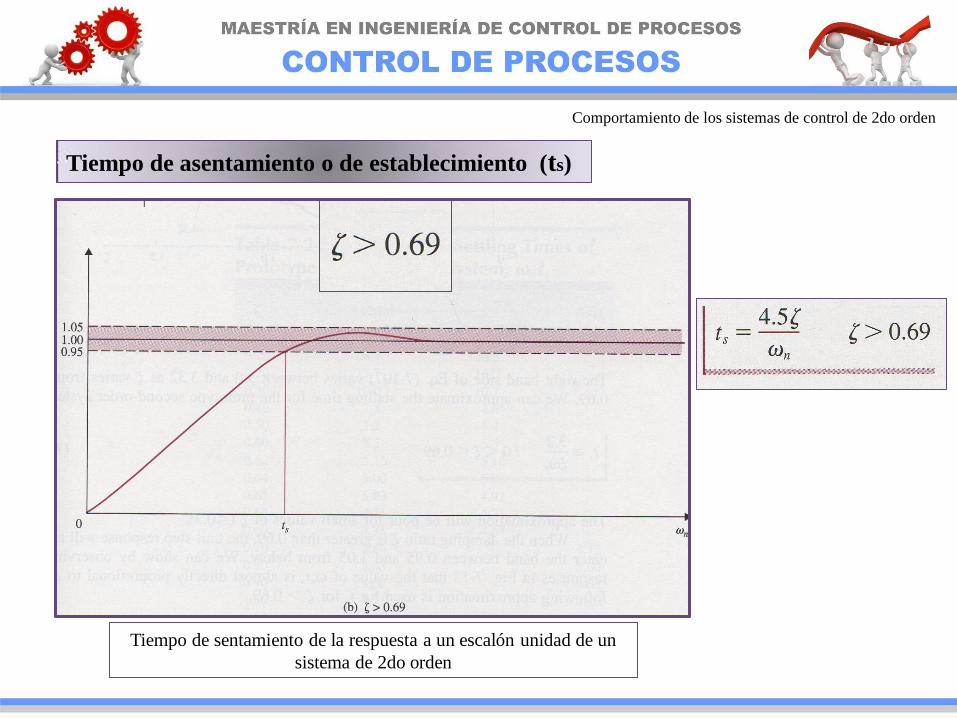
Tiempo de asentamiento o de establecimiento ( )
Tiempo de sentamiento de la respuesta a un escalón unidad de un
sistema de 2do orden
Comportamiento de los sistemas de control de 2do orden
Tiempo de asentamiento o de establecimiento (ts)
Tiempo de sentamiento de la respuesta a un escalón unidad de un
sistema de 2do orden
Comportamiento de los sistemas de control de 2do orden
Ver: Sistemas de control moderno de R. Dorf y R. Bishop 10ma Edición

Fórmulas de diseño
Ver: Sistemas de control moderno de R. Dorf y R. Bishop 10ma Edición
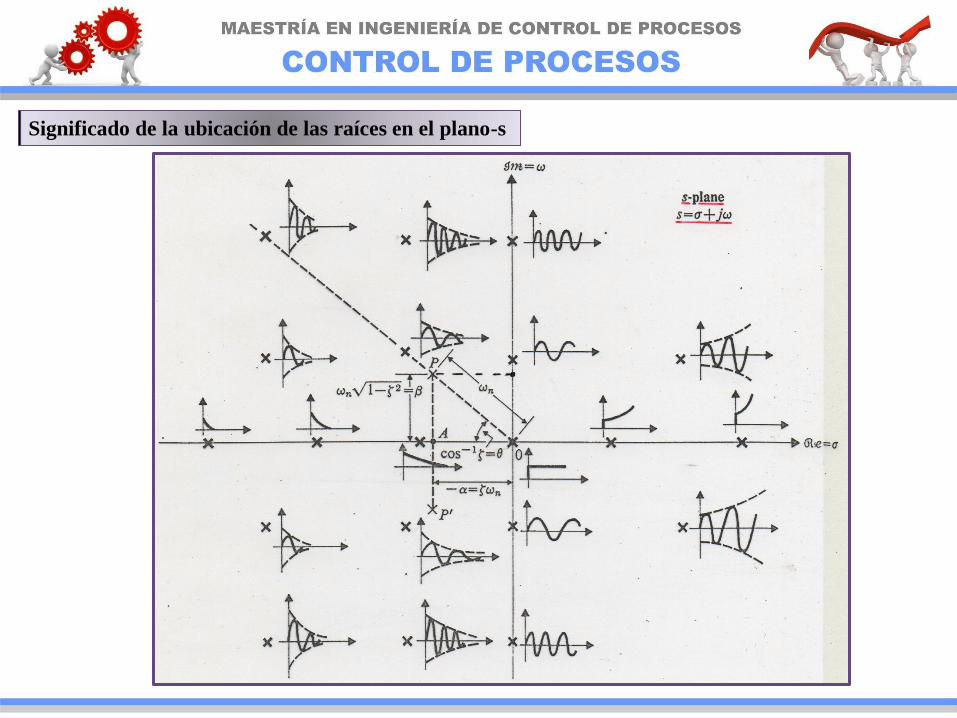
Significado de la ubicación de las raíces en el plano-s
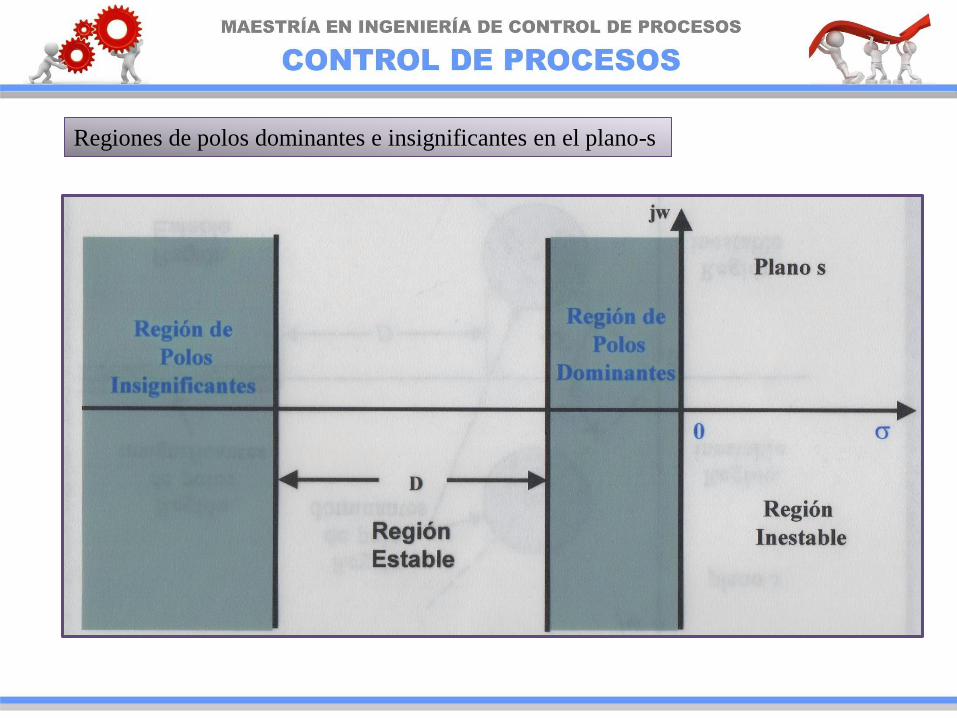
Regiones de polos dominantes e insignificantes en el plano-s
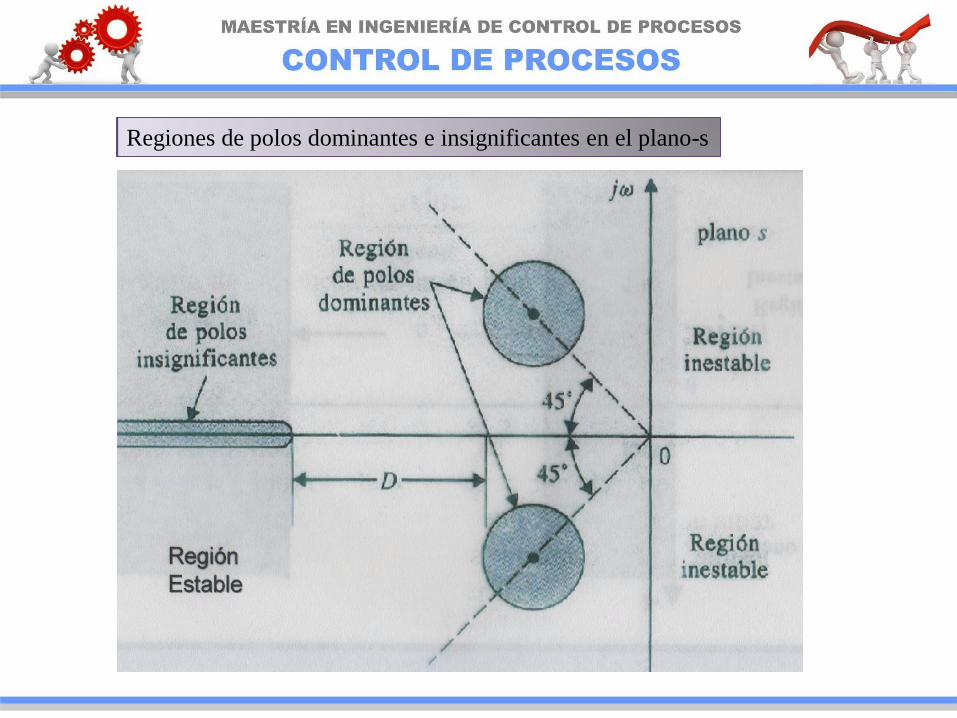
Regiones de polos dominantes e insignificantes en el plano-s
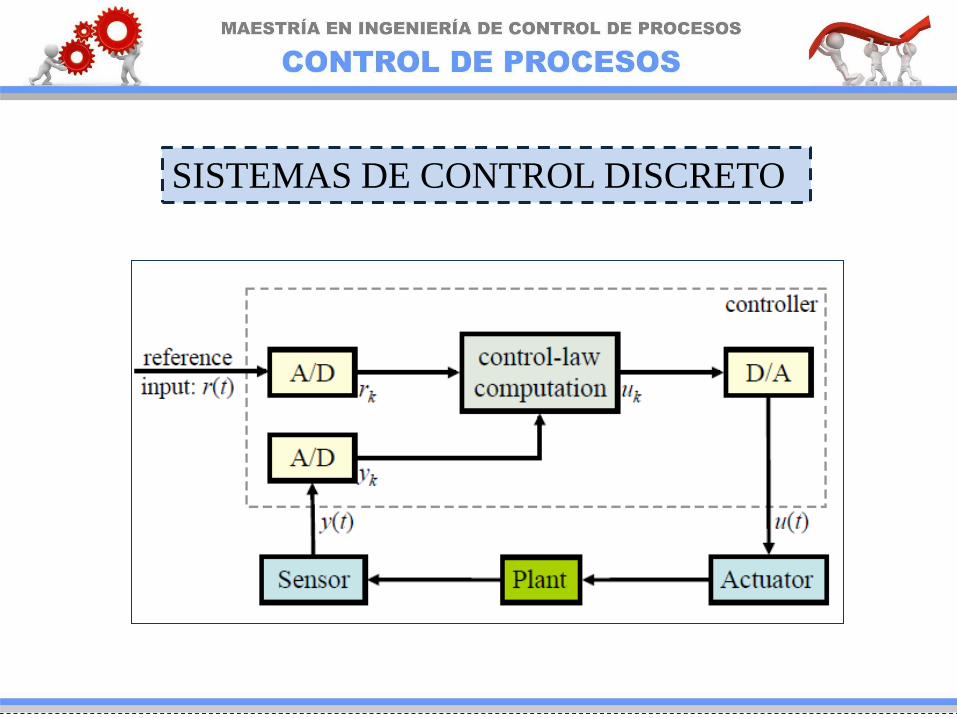
SISTEMAS DE CONTROL DISCRETO
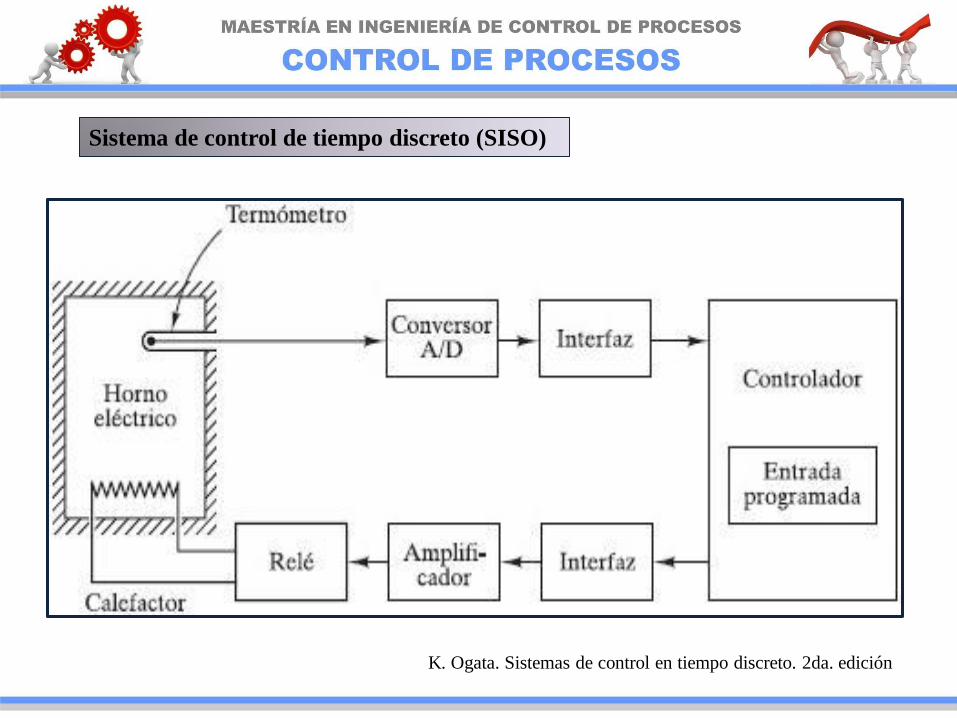
Sistema de control de tiempo discreto (SISO)
K. Ogata. Sistemas de control en tiempo discreto. 2da. edición
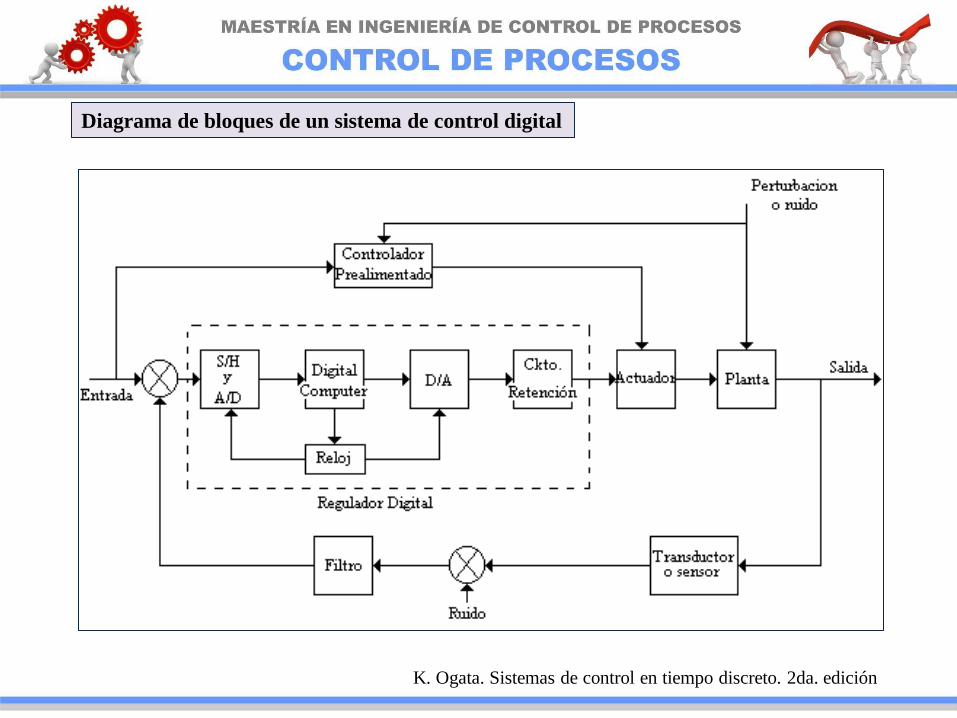
Diagrama de bloques de un sistema de control digital
K. Ogata. Sistemas de control en tiempo discreto. 2da. edición
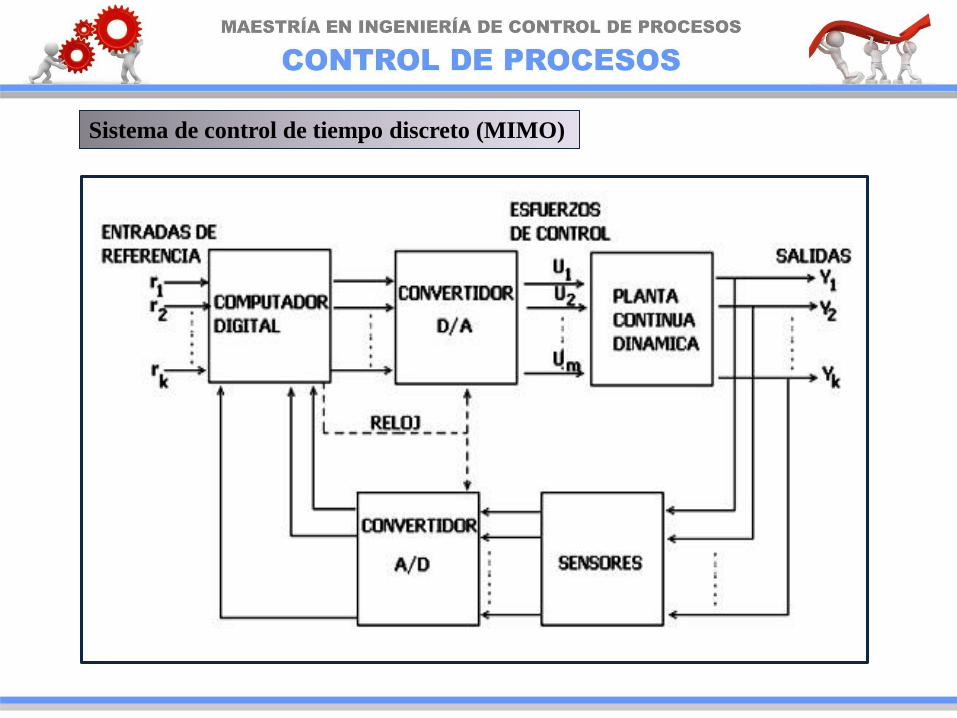
Sistema de control de tiempo discreto (MIMO)
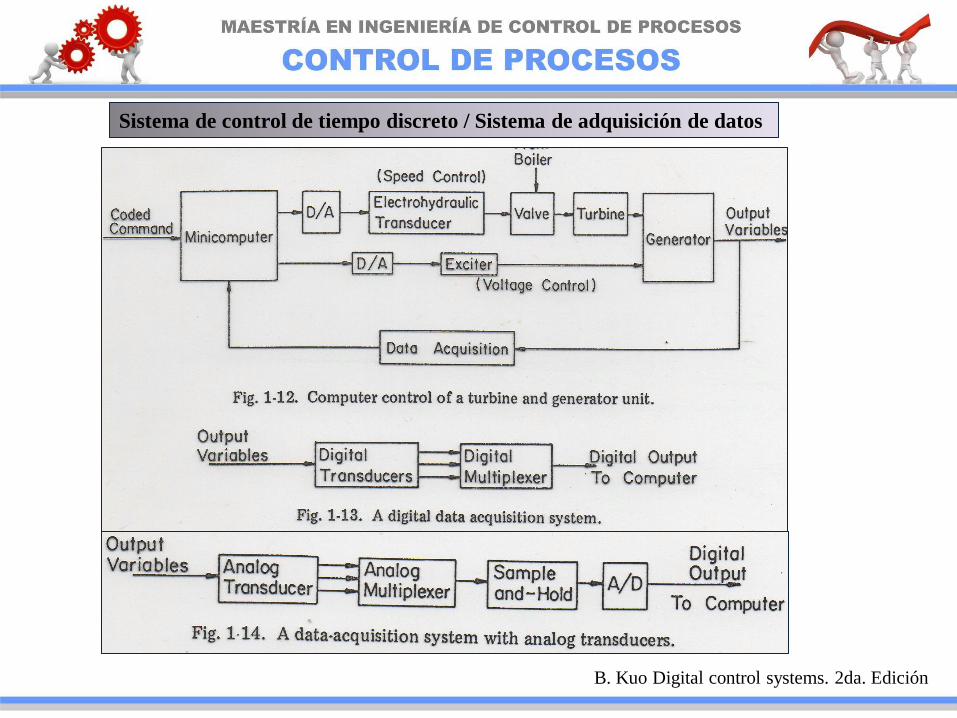
Sistema de control de tiempo discreto / Sistema de adquisición de datos
B. Kuo Digital control systems. 2da. Edición
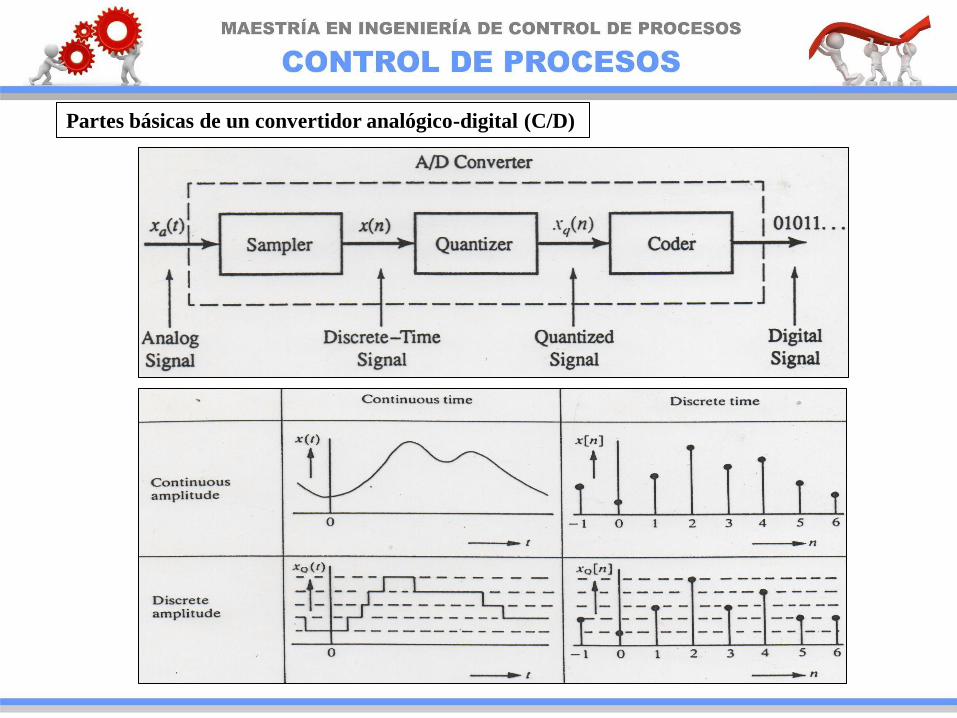
Partes básicas de un convertidor analógico-digital (C/D)
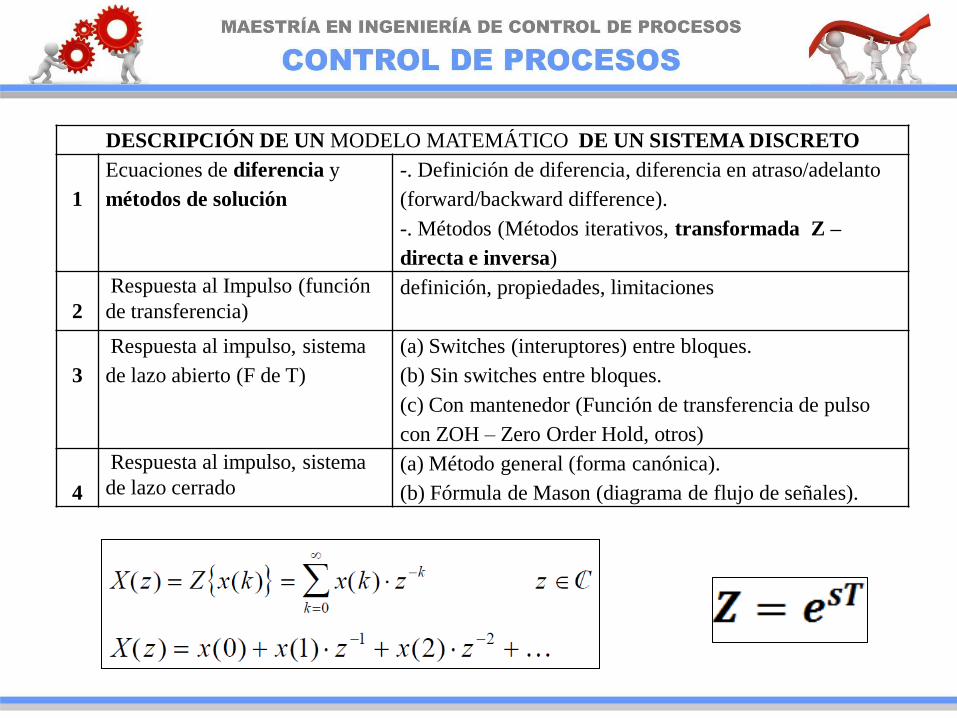
DESCRIPCIÓN DE UN MODELO MATEMÁTICO DE UN SISTEMA DISCRETO
1
Ecuaciones de diferencia y
métodos de solución
-. Definición de diferencia, diferencia en atraso/adelanto
(forward/backward difference).
-. Métodos (Métodos iterativos, transformada Z –
directa e inversa)
2
Respuesta al Impulso (función
de transferencia) definición, propiedades, limitaciones
3
Respuesta al impulso, sistema
de lazo abierto (F de T)
(a) Switches (interuptores) entre bloques.
(b) Sin switches entre bloques.
(c) Con mantenedor (Función de transferencia de pulso
con ZOH – Zero Order Hold, otros)
4
Respuesta al impulso, sistema
de lazo cerrado (a) Método general (forma canónica).
(b) Fórmula de Mason (diagrama de flujo de señales).
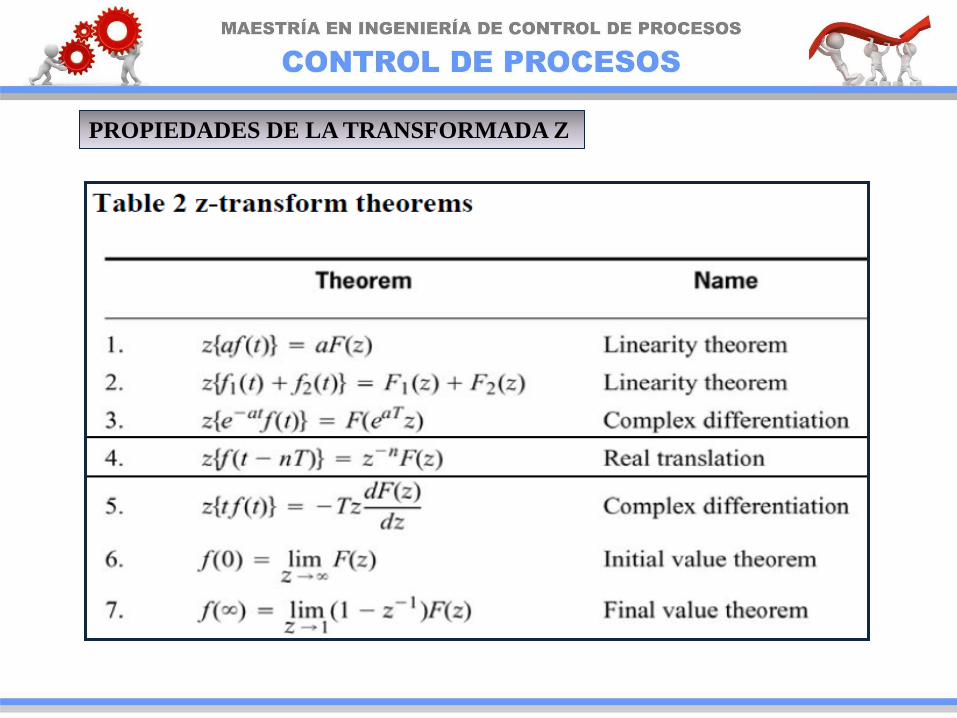
PROPIEDADES DE LA TRANSFORMADA Z
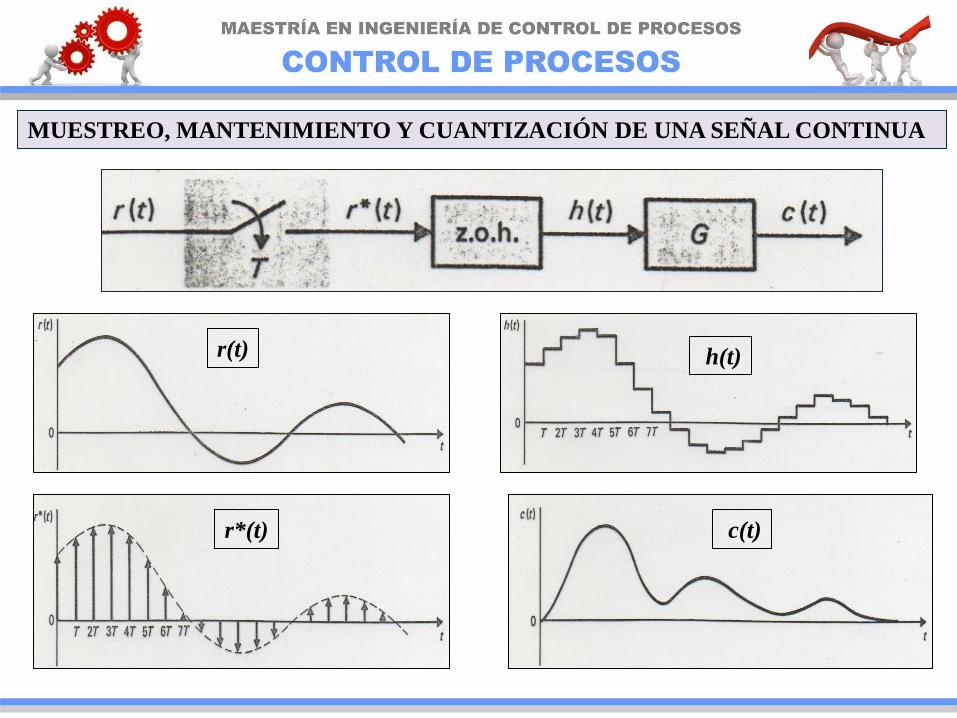
MUESTREO, MANTENIMIENTO Y CUANTIZACIÓN DE UNA SEÑAL CONTINUA
r(t)
r*(t)
h(t)
c(t)
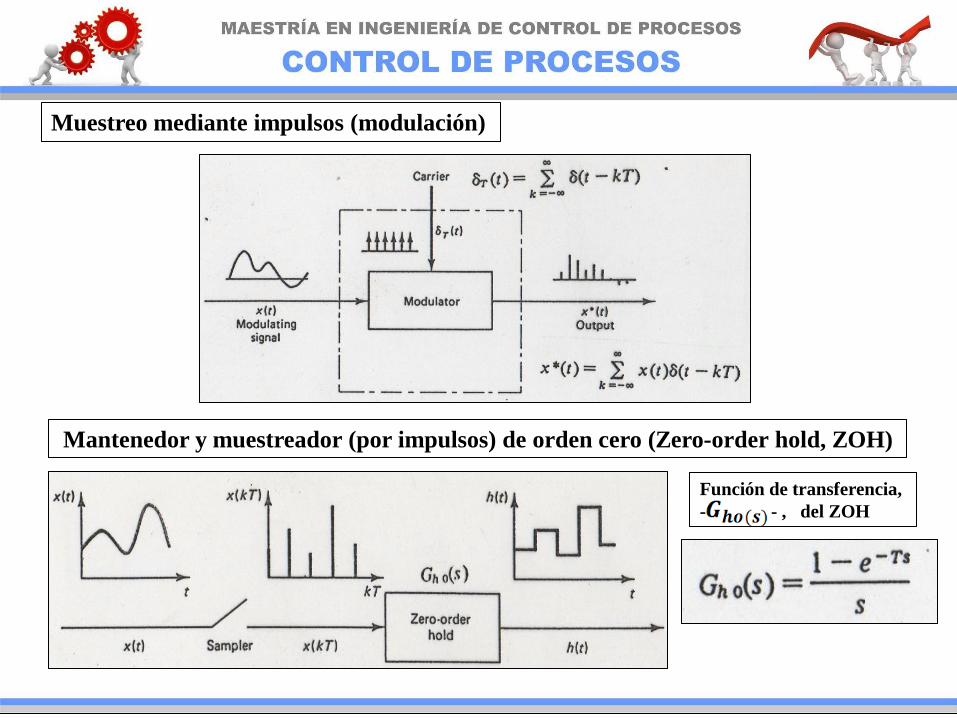
Mantenedor y muestreador (por impulsos) de orden cero (Zero-order hold, ZOH)
Muestreo mediante impulsos (modulación)
Función de transferencia,
- - , del ZOH
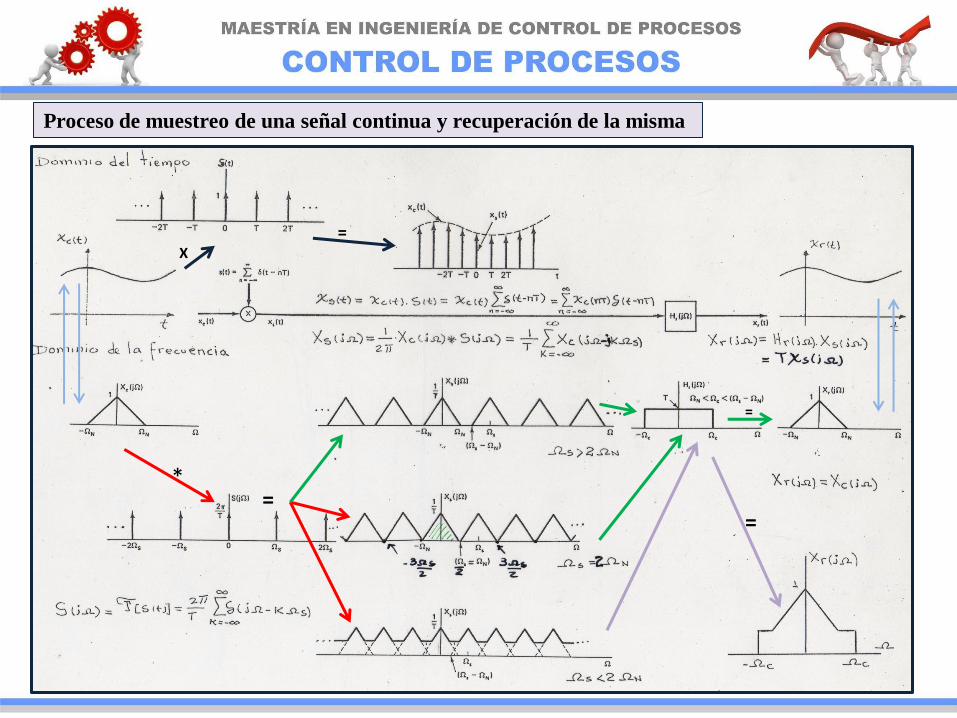
Proceso de muestreo de una señal continua y recuperación de la misma
X =
* =
=
=
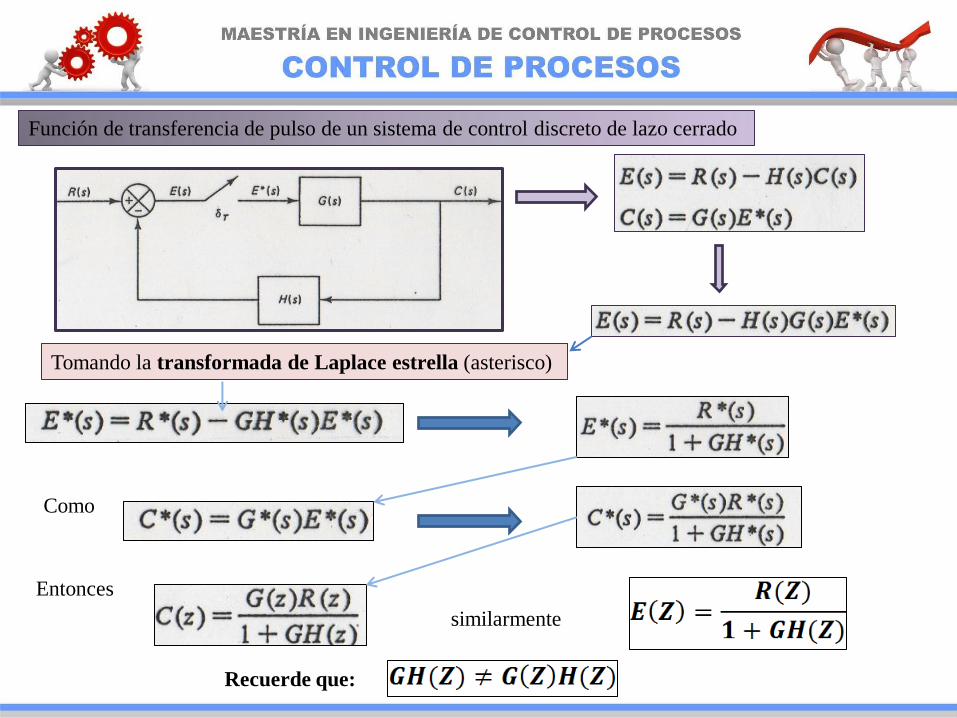
Función de transferencia de pulso de un sistema de control discreto de lazo cerrado
Tomando la transformada de Laplace estrella (asterisco)
Como
Entonces
similarmente
Recuerde que:
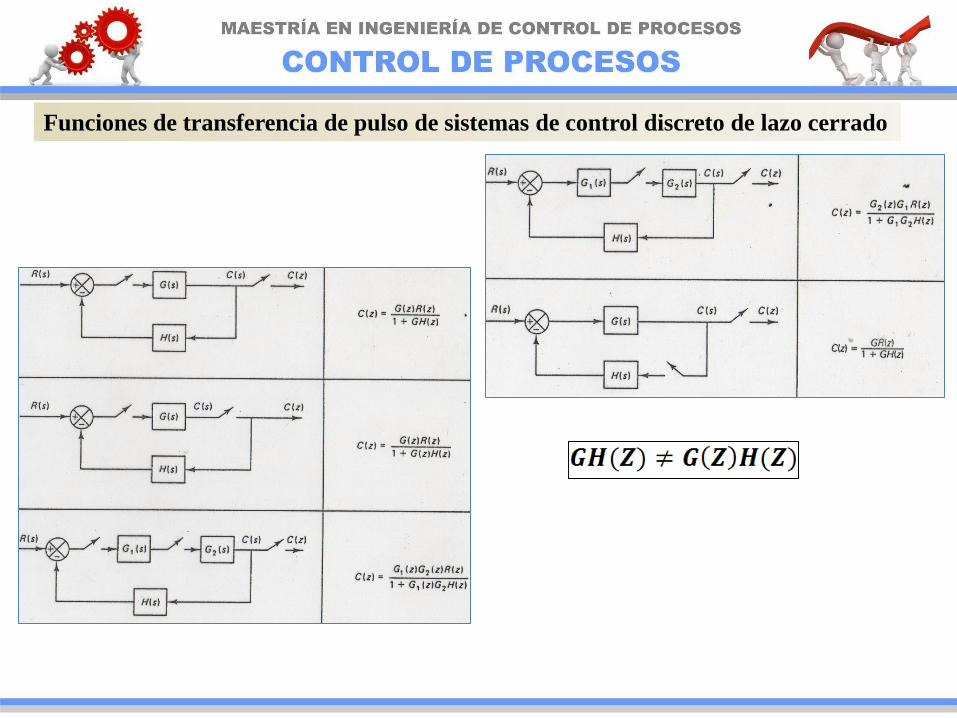
Funciones de transferencia de pulso de sistemas de control discreto de lazo cerrado
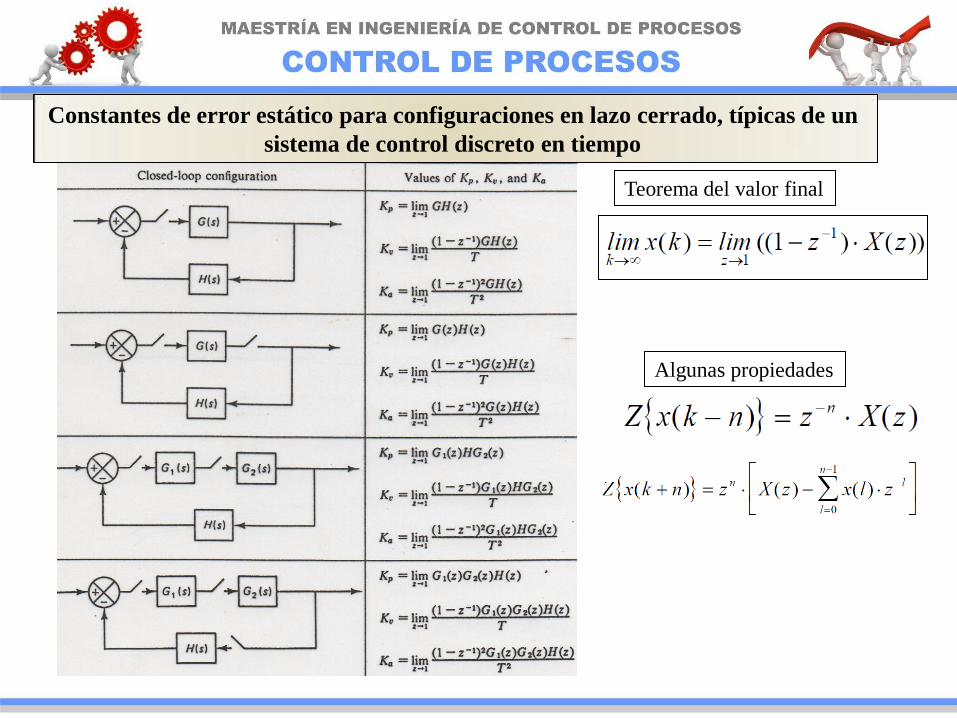
Constantes de error estático para configuraciones en lazo cerrado, típicas de un
sistema de control discreto en tiempo
Teorema del valor final
Algunas propiedades
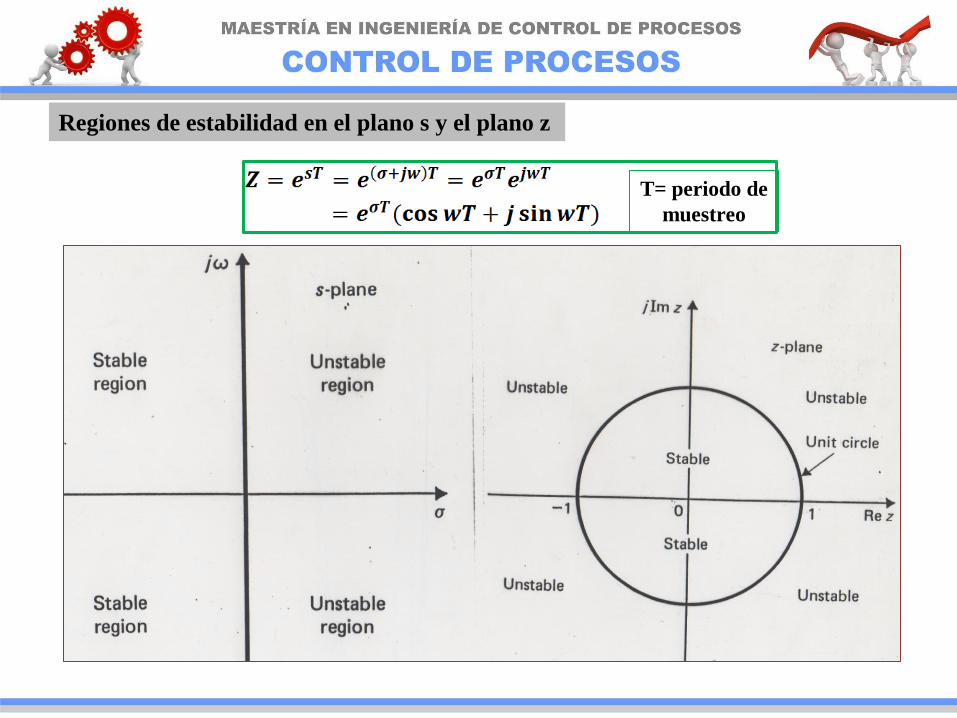
Regiones de estabilidad en el plano s y el plano z
T= periodo de
muestreo
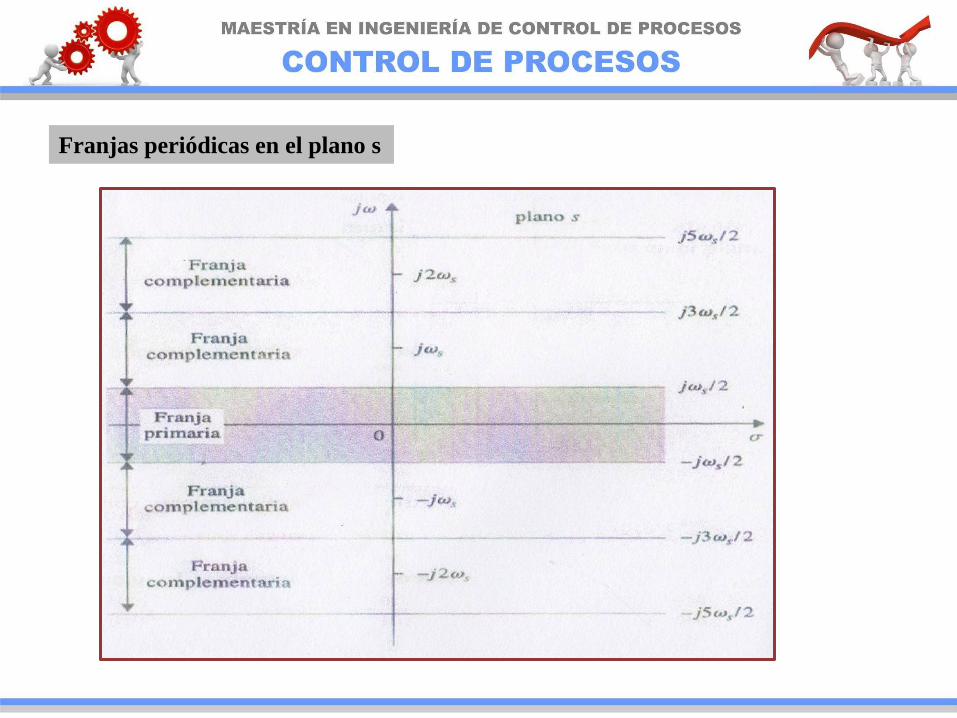
Franjas periódicas en el plano s

Correspondencia entre el plano s y plano z
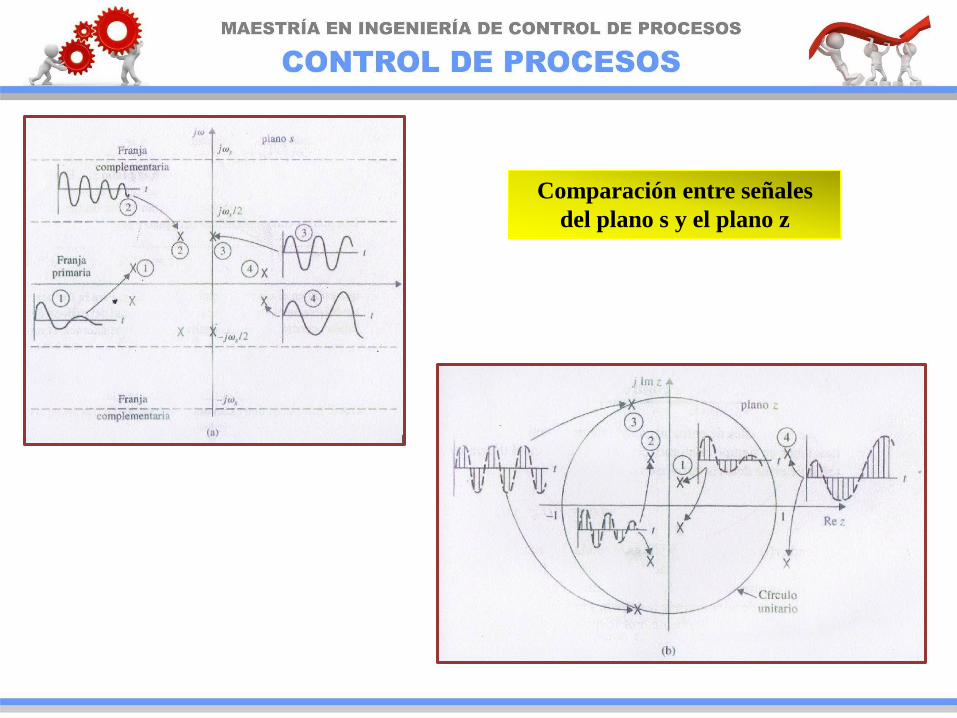
Comparación entre señales
del plano s y el plano z
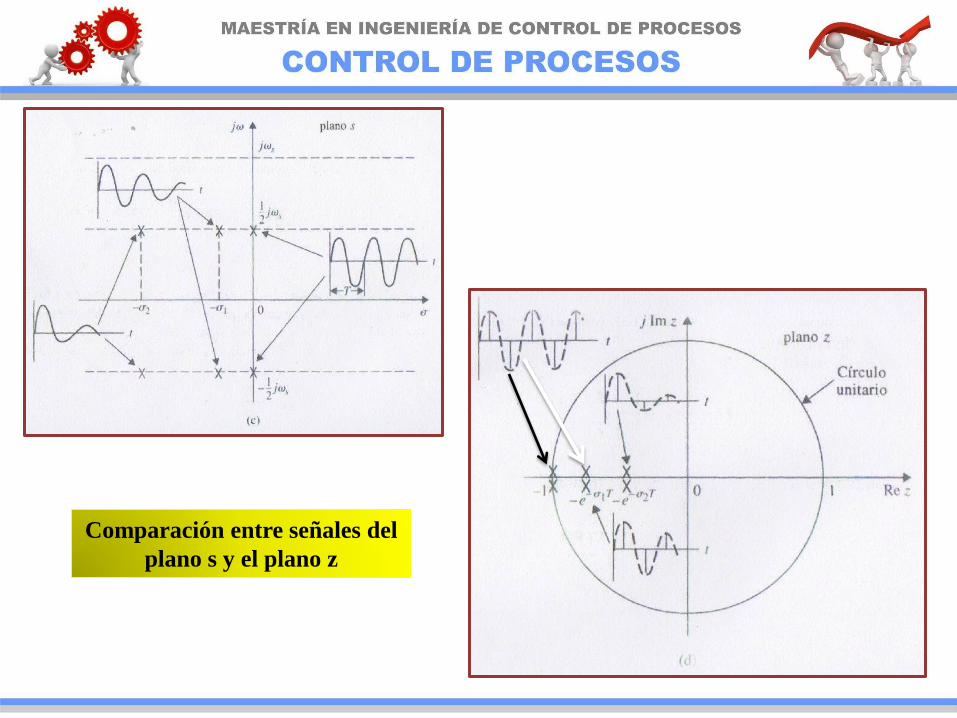
Comparación entre señales del
plano s y el plano z

ESTABILIDAD DE LOS SISTEMAS LINEALES DE CONTROL EN TIEMPO DISCRETO
Estbilidad en general.
Estabilibad BIBO (entrada acotada-salida acotada).
– CRITERIOS DE ESTABILIDAD (Plano z).
Prueba de estabilidad de Jury
- CRITERIOS DE ESTABILIDAD (Plano w).
Criterio de estabilidad de Routh-Hurwitz.
Metodo de sustitución directa.
Lugar de las raíces (Root locus method)
Criterio de estabilidad de Bode
Margen de ganancia (Gain Margin) y margen de fase (Phase Margin).
Criterios de estabilidad de Nyquist.
Carta de Nichols

K. Ogata. Sistemas de control en tiempo discreto. 2da. edición

Correspondencias entre el plano s y plano z, entre el palnoz y el plano w
K. Ogata. Sistemas de control en tiempo discreto. 2da. edición
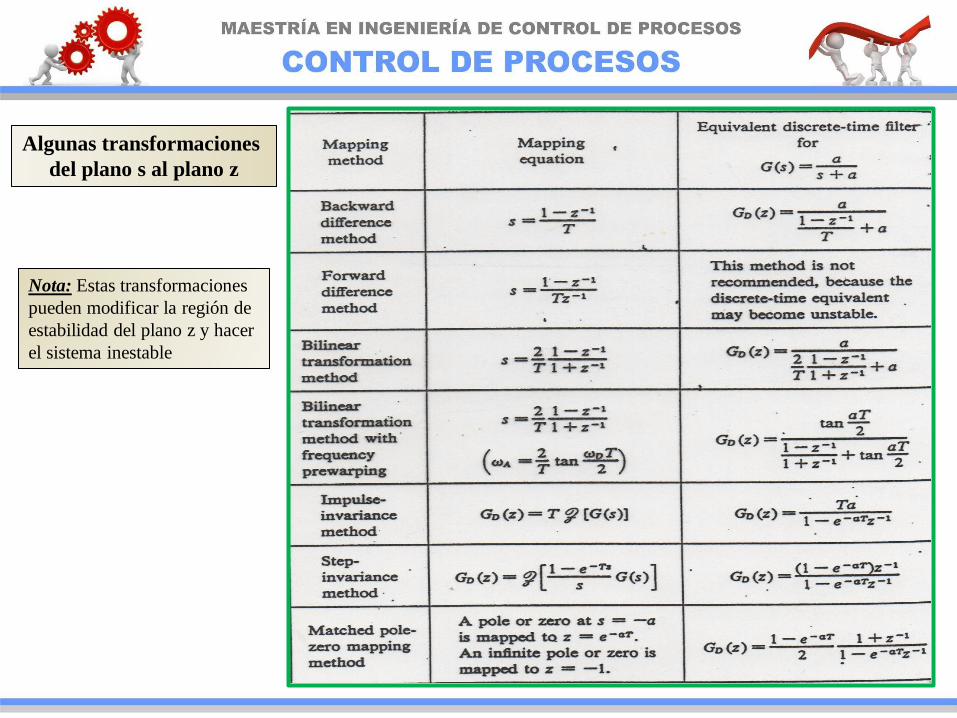
Algunas transformaciones
del plano s al plano z
Nota: Estas transformaciones
pueden modificar la región de
estabilidad del plano z y hacer
el sistema inestable

Tabulación de resultados del análisis de las variables de estado para sistemas lineales continuos y discretos








