- 1 -
Matemáticas 1º Bachillerato CCNN
Tema 1.- Números reales
1.- Números racionales
Los números racionales son todos los que se pueden expresar en forma de fracción, o lo que
es lo mismo, son los números enteros, los números decimales finitos y los números
decimales periódicos.
2.- Números irracionales
Los números irracionales son los que no son racionales, es decir, todos los que NO se
pueden expresar en forma de fracción, o lo que es lo mismo, son los números decimales NO
periódicos.
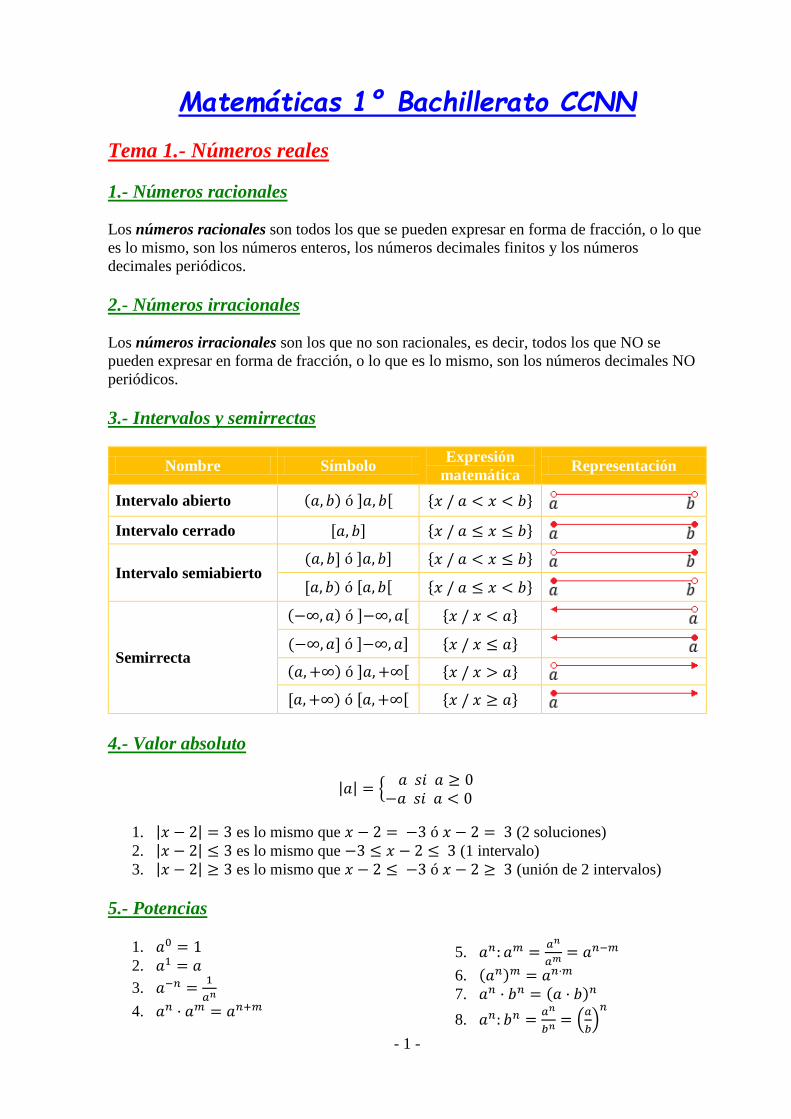
3.- Intervalos y semirrectas
Nombre Símbolo Expresión
matemática Representación
Intervalo abierto (𝑎, 𝑏) ó ]𝑎, 𝑏[ {𝑥 / 𝑎 < 𝑥 < 𝑏}
Intervalo cerrado [𝑎, 𝑏] {𝑥 / 𝑎 ≤ 𝑥 ≤ 𝑏}
Intervalo semiabierto (𝑎, 𝑏] ó ]𝑎, 𝑏] {𝑥 / 𝑎 < 𝑥 ≤ 𝑏}
[𝑎, 𝑏) ó [𝑎, 𝑏[ {𝑥 / 𝑎 ≤ 𝑥 < 𝑏}
Semirrecta
(−∞, 𝑎) ó ]−∞, 𝑎[ {𝑥 / 𝑥 < 𝑎}
(−∞, 𝑎] ó ]−∞, 𝑎] {𝑥 / 𝑥 ≤ 𝑎}
(𝑎, +∞) ó ]𝑎, +∞[ {𝑥 / 𝑥 > 𝑎}
[𝑎, +∞) ó [𝑎, +∞[ {𝑥 / 𝑥 ≥ 𝑎}
4.- Valor absoluto
|𝑎| = { 𝑎 𝑠𝑖 𝑎 ≥ 0−𝑎 𝑠𝑖 𝑎 < 0
1. |𝑥 − 2| = 3 es lo mismo que 𝑥 − 2 = −3 ó 𝑥 − 2 = 3 (2 soluciones)
2. |𝑥 − 2| ≤ 3 es lo mismo que −3 ≤ 𝑥 − 2 ≤ 3 (1 intervalo)
3. |𝑥 − 2| ≥ 3 es lo mismo que 𝑥 − 2 ≤ −3 ó 𝑥 − 2 ≥ 3 (unión de 2 intervalos)
5.- Potencias
1. 𝑎0 = 1
2. 𝑎1 = 𝑎
3. 𝑎−𝑛 =1
𝑎𝑛
4. 𝑎𝑛 · 𝑎𝑚 = 𝑎𝑛+𝑚
5. 𝑎𝑛: 𝑎𝑚 =𝑎𝑛
𝑎𝑚= 𝑎𝑛−𝑚
6. (𝑎𝑛)𝑚 = 𝑎𝑛·𝑚
7. 𝑎𝑛 · 𝑏𝑛 = (𝑎 · 𝑏)𝑛
8. 𝑎𝑛: 𝑏𝑛 =𝑎𝑛
𝑏𝑛= (
𝑎
𝑏)𝑛

- 2 -
6.- Radicales
6.1.- Propiedades
1. √𝑎𝑛𝑛
= 𝑎
2. √𝑎𝑚𝑛
= 𝑎𝑚
𝑛
3. √𝑎𝑚·𝑝𝑛·𝑝
= √𝑎𝑚𝑛
4. (√𝑎𝑚𝑛
)𝑝= √𝑎𝑚·𝑝
𝑛
5. √√𝑎𝑝𝑛
= √𝑎𝑛·𝑝
6. √𝑎𝑛
· √𝑏𝑛
= √𝑎 · 𝑏𝑛
7. √𝑎𝑛
√𝑏𝑛 = √
𝑎
𝑏
𝑛
6.2.- Extraer números en los radicales
√2563
= √283
= √23 · 23 · 223
= √233
· √233
· √223
= 2 · 2 · √223
= 4√223
= 4√43
6.3.- Suma y resta de radicales
Solo se pueden sumar y restar radicales EXACTAMENTE IGUALES. Se extrae del radical:
7√23
− 4√12503
+ 2√2146
= 7√23
− 20√23
+ 8√226
= 7√23
− 20√23
+ 8√23
= −5√23
6.4.- Producto y división de radicales
Solo se pueden multiplicar y dividir radicales con el MISMO ÍNDICE:
√10
√53 =
√1036
√526 = √
103
52
6
= √23 · 53
52
6
= √23 · 56
= √406
6.5.- Racionalización
4
3 √627 =
4
3 √627 ·
√657
√657 =
4 √657
3 √677 =
4 √657
3·6=
4 √657
18=
2 √657
9
2 √48
5(√7−3√6)=
2 √48
5(√7−3√6)·√7+3√6
√7+3√6=
2 √48
·(√7+3√6)
5((√7)2−(3√6)
2)=
2 √48
·(√7+3√6)
5(7−9·6)=
2 √48
·(√7+3√6)
−235
7.- Logaritmos
log𝑎 𝑃 = 𝑏 significa que 𝑎𝑏 = 𝑃
7.1.- Propiedades
1. log𝑎 1 = 0
2. log𝑎 𝑎 = 1
3. log𝑎(𝑃 · 𝑄) = log𝑎 𝑃 + log𝑎 𝑄
4. log𝑎 (𝑃
𝑄) = log𝑎 𝑃 − log𝑎 𝑄
5. log𝑎 𝑃𝑛 = 𝑛 log𝑎 𝑃
6. Cambio de base: log𝑎 𝑃 =log𝑏𝑃
log𝑏 𝑎
¡¡OJO con las propiedades 3 y 4!!:
log𝑎(𝑃 + 𝑄) ≠ (log𝑎 𝑃)(log𝑎 𝑄)
log𝑎(𝑃 − 𝑄) ≠log𝑎 𝑃
log𝑎𝑄

3
Tema 2.- Álgebra
1.- Ecuaciones de segundo grado
Se hallan sus raíces con la fórmula: 𝑥 =−𝑏±√𝑏2−4𝑎𝑐
2𝑎.
𝑏2 − 4𝑎𝑐 > 0: 2 soluciones
𝑏2 − 4𝑎𝑐 = 0: 1 solución doble
𝑏2 − 4𝑎𝑐 < 0: no hay solución
1.1.- Ecuaciones bicuadradas
3𝑥4 − 15𝑥2 + 12 = 0 → {𝑥2 = 𝑦
3𝑦2 − 15𝑦 + 12 = 0 → {
𝑥2 = 𝑦
𝑦 =15±√152−4·3·12
2·3
→ {𝑥 = ±√𝑦
𝑦1 = 4𝑦2 = 1
→
→ {𝑥 = ±√4 = ±2
𝑥 = ±√1 = ±1
2.- Factorización de polinomios
Para factorizar el polinomio 𝑃(𝑥):
1. Se saca factor común de 𝑥 (elevado a la mayor potencia posible).
2. Se utiliza Ruffini con los divisores del término independiente. Cuando el resto dé 0,
tendremos que 𝑃(𝑥)
𝑥−𝑎= 𝑄(𝑥), es decir, 𝑃(𝑥) = (𝑥 − 𝑎)𝑄(𝑥).
3. Se repite el proceso con 𝑄(𝑥) hasta llegar a un polinomio de 2º grado.
4. Se utiliza la fórmula de 2º grado con el último polinomio.
5. Si se llega a un polinomio irreducible, se deja.
3.- Fracciones algebraicas
3.1.- Simplificación
Se divide numerador y denominador por el m.c.d. de los dos polinomios.
3.2.- Fracciones equivalentes
Una fracción se obtiene al multiplicar o dividir tanto el numerador como el denominador de
la otra fracción por un mismo polinomio.
Para comprobar si dos fracciones algebraicas son equivalentes, se usa el producto en cruz.
3.3.- Reducción a denominador común
Se halla el m.c.m. de los denominadores, que será el denominador común. Los nuevos
numeradores serán el resultado de dividir el m.c.m. por los denominadores originales y
multiplicar por los numeradores originales.

4
3.4.- Suma y resta
Se reducen las fracciones a denominador común y se suman o restan los nuevos
numeradores.
3.5.- Producto y división
El producto se hace multiplicando los numeradores entre sí y multiplicando los
denominadores entre sí. La división se hace multiplicando en cruz.
NOTA: se puede observar que los procedimientos de fracciones algebraicas son exactamente
los mismos que los de fracciones numéricas.
4.- Ecuaciones con la x dentro de un radical
Se despeja un radical y se eleva al cuadrado ambos miembros de la ecuación. Si después hay
más radicales, se repite el proceso.
NOTA: en ocasiones aparecen soluciones ficticias, así que hay que COMPROBAR todas las
soluciones.
5.- Ecuaciones con la x en el denominador
Se operan las fracciones tanto de un lado de la ecuación como del otro hasta que quede una
única fracción en cada miembro de la ecuación. Después se multiplica en cruz para obtener
una ecuación polinómica normal.
NOTA: en ocasiones aparecen soluciones ficticias, así que hay que COMPROBAR todas las
soluciones.
6.- Ecuaciones exponenciales
Básicamente hay de tres tipos:
1. 31−𝑥2=
1
27 → 31−𝑥
2=
1
33= 3−3 → 1 − 𝑥2 = −3 → 𝑥2 = 4 → x= ±2
2. 31−𝑥2= 2 → log3 3
1−𝑥2 = log3 2 → 1 − 𝑥2 = log3 2 → 𝑥2 = 1 − log3 2 →
→ 𝑥2 = 1 −log2
log3≈ 0′37 → x≈ ±0′61
3. 32𝑥 − 12 · 3𝑥−1 = −3 → (3𝑥)2 − 12 ·3𝑥
31= −3 → (3𝑥)2 − 4 · 3𝑥 = −3 →
→ {3𝑥 = 𝑦
𝑦2 − 4𝑦 = −3 → {
3𝑥 = 𝑦𝑦1 = 1𝑦1 = 3
→ {3𝑥 = 1 = 30
3𝑥 = 3 = 31 → {
𝑥 = 0𝑥 = 1
NOTA: Las ecuaciones del tipo 1 también se pueden resolver como en el tipo 2.
7.- Ecuaciones logarítmicas
Utilizando las propiedades de los logaritmos se consigue tener un único logaritmo en cada
miembro de la ecuación (deben tener la misma base). En ese momento se quitan los
logaritmos y se obtiene una ecuación más sencilla.
5
NOTA: como los logaritmos de números negativos no existen, en ocasiones aparecen
soluciones ficticias. Así que hay que COMPROBAR TODAS las soluciones.
8.- Sistemas de ecuaciones
Por lo general se resuelven mediante tres métodos:
Sustitución: se despeja una incógnita de una ecuación y se sustituye en la otra
ecuación.
Igualación: se despeja la misma incógnita en las dos ecuaciones y se igualan los
resultados.
Reducción: se multiplica una ecuación por un número (o las dos ecuaciones por
números distintos) y se suman para eliminar una incógnita de una de las ecuaciones.
Si hay ecuaciones de los tipos vistos en las secciones 4, 5, 6 y 7 y no se puede utilizar
ninguno de los tres métodos anteriores, primero se transforman estas ecuaciones en
polinómicas.
9.- Método de Gauss
Un sistema escalonado de tres incógnitas es aquel en el que en una ecuación aparece
únicamente una incógnita, en otra aparece esa incógnita y otra más, y en la otra ecuación
aparecen las 3 incógnitas.
El método de Gauss consiste en aplicar el método de reducción varias veces hasta conseguir
un sistema escalonado, que se resuelve fácilmente.
10.- Inecuaciones con una incógnita
10.1.- Inecuaciones de primer grado
Se resuelve la inecuación teniendo en cuenta que al multiplicar o dividir por números
negativos la desigualdad cambia de sentido. La solución es un intervalo.
10.2.- Inecuaciones de segundo grado
1. Se transforma la inecuación en ecuación (se cambia la desigualdad por un =) y se
resuelve.
2. Se dibuja la recta real y se representan las soluciones, de modo que éstas dividen la
recta real en varios intervalos.
3. Se sustituye la 𝑥 de la inecuación por un número de uno de los intervalos, y si la
inecuación se cumple, ese intervalo forma parte de la solución.
4. Se repite el punto 3 con los demás intervalos.
5. La solución de la inecuación es la unión de los intervalos correctos.
10.3.- Sistemas de inecuaciones
Se resuelven las inecuaciones por separado. La solución es la intersección de todos los
intervalos.

6
Tema 3.- Resolución de triángulos
1.- Razones trigonométricas de un ángulo agudo
En un triángulo rectángulo:
sin 𝛼 =𝑐𝑎𝑡𝑒𝑡𝑜 𝑜𝑝𝑢𝑒𝑠𝑡𝑜
ℎ𝑖𝑝𝑜𝑡𝑒𝑛𝑢𝑠𝑎 cos 𝛼 =
𝑐𝑎𝑡𝑒𝑡𝑜 𝑐𝑜𝑛𝑡𝑖𝑔𝑢𝑜
ℎ𝑖𝑝𝑜𝑡𝑒𝑛𝑢𝑠𝑎 tan𝛼 =
sin𝛼
cos𝛼=
𝑐𝑎𝑡𝑒𝑡𝑜 𝑜𝑝𝑢𝑒𝑠𝑡𝑜
𝑐𝑎𝑡𝑒𝑡𝑜 𝑐𝑜𝑛𝑡𝑖𝑔𝑢𝑜
Para obtener una razón trigonométrica a partir de otra hay que conocer las relaciones
fundamentales:
sin2 𝛼 + cos2 𝛼 = 1 1
cos2𝛼= 1 + tan2 𝛼
2.- Resolución de triángulos rectángulos
Se resuelven utilizando las razones trigonométricas, el teorema de Pitágoras, y el hecho de
que la suma de los tres ángulos es 180º.
3.- Razones trigonométricas de cualquier ángulo
En la circunferencia goniométrica se puede ver que: el seno es positivo en el 1º y 2º
cuadrantes, y negativo en el 3º y 4º cuadrantes; el coseno es positivo en el 1º y 4º cuadrantes,
y negativo en el 2º y 3º cuadrantes; y la tangente, por ser la división del seno y el coseno, es
positiva en el 1º y 3º cuadrantes, y negativa en el 2º y 4º cuadrantes.
Existen varias relaciones entre las razones trigonométricas de algunos ángulos, pero las más
importantes son:
sin(180° − 𝛼) = sin 𝛼cos(−𝛼) = cos 𝛼
tan(180° + 𝛼) = tan𝛼
sin(90° − 𝛼) = cos 𝛼cos(90° − 𝛼) = sin 𝛼
4.- Resolución de cualquier triángulo
Teorema del seno: 𝑎
sin �̂�=
𝑏
sin �̂�=
𝑐
sin �̂�
Teorema del coseno: 𝑎2 = 𝑏2 + 𝑐2 − 2𝑏𝑐 cos �̂�
Datos Resolución
Dos ángulos y un lado Teorema del seno (x2)
Dos lados y un ángulo opuesto* Teorema del seno (x2) o Teorema del
coseno (x2)
Dos lados y el ángulo que forman Teorema del coseno y Teorema del seno
Tres lados Teorema del coseno (x2)
En todos los casos hay que utilizar el hecho de que la suma de los tres ángulos es 180º.
* Tiene dos soluciones, debido a que sin(180° − 𝛼) = sin 𝛼.

7
Tema 4.- Funciones y fórmulas trigonométricas
1.- Radianes
Una circunferencia son 360º o, lo que es lo mismo, 2𝜋 radianes. Para pasar de grados a
radianes y viceversa, se usa una regla de tres (se puede usar que 180º son 𝜋 radianes).
2.- Ángulos de cualquier medida
Hay que tener en cuenta que 𝛼 = 𝛼 + 360° · 𝑛, siendo 𝑛 un número entero (positivo o
negativo); o lo que es lo mismo, 𝛼 = 𝛼 + 2𝜋 · 𝑛. Por tanto, 26°, 386°, 746°, −334°, … son
todos el mismo ángulo.
3.- Fórmulas trigonométricas
Suma y resta de ángulos Ángulo doble Ángulo mitad
𝐬𝐢𝐧(𝜶 ± 𝜷) = 𝐬𝐢𝐧𝜶 𝐜𝐨𝐬𝜷 ± 𝐜𝐨𝐬𝜶 𝐬𝐢𝐧𝜷 sin(2𝛼) = 2 sin𝛼 cos 𝛼 sin𝛼
2= ±√
1 − cos𝛼
2
𝐜𝐨𝐬(𝜶 ± 𝜷) = 𝐜𝐨𝐬𝜶 𝐜𝐨𝐬𝜷 ∓ 𝐬𝐢𝐧𝜶 𝐬𝐢𝐧𝜷 cos(2𝛼) = cos2 𝛼 − sin2 𝛼 cos𝛼
2= ±√
1 + cos𝛼
2
𝐭𝐚𝐧(𝜶 ± 𝜷) =𝐭𝐚𝐧𝜶 ± 𝐭𝐚𝐧𝜷
𝟏 ∓ 𝐭𝐚𝐧𝜶 𝐭𝐚𝐧𝜷 tan(2𝛼) =
2 tan𝛼
1 − tan2 𝛼 tan
𝛼
2= ±√
1 − cos𝛼
1 + cos𝛼
En el caso del ángulo mitad, el signo depende de en qué cuadrante se encuentre 𝛼
2.
Se recomienda aprenderse solo sin(𝛼 ± 𝛽), cos(𝛼 ± 𝛽), tan(𝛼 ± 𝛽) y cos𝛼
2. Las fórmulas
sin(2𝛼), cos(2𝛼) y tan(2𝛼) son simplemente coger las fórmulas sin(𝛼 + 𝛽), cos(𝛼 + 𝛽) y
tan(𝛼 + 𝛽) y cambiar 𝛽 por 𝛼. El sin𝛼
2 se consigue cambiando un signo en cos
𝛼
2, y tan
𝛼
2 es la
división del seno por el coseno.
3.1.- Sumar y restar dos senos o dos cosenos
Se usa un pequeño truco y luego se usan las fórmulas sin(𝛼 ± 𝛽) y cos(𝛼 ± 𝛽). cos 3𝛼 − cos𝛼 = cos(2𝛼 + 𝛼) − cos(2𝛼 − 𝛼) = cos 2𝛼 cos𝛼 − sin 2𝛼 sin 𝛼 − (cos 2𝛼 cos𝛼 + sin 2𝛼 sin 𝛼) =
= −2 sin 2𝛼 sin 𝛼 = −2(2 sin 𝛼 cos 𝛼) sin 𝛼 = −4 sin2 𝛼 cos𝛼
4.- Ecuaciones trigonométricas
sin 2𝛼 = tan𝛼 → 2 sin 𝛼 cos 𝛼 =sin 𝛼
cos𝛼 → 2 sin 𝛼 cos2 𝛼 − sin 𝛼 = 0 → sin 𝛼 (2 cos2 𝛼 − 1) = 0 →
→ {sin 𝛼 = 0
cos2 𝛼 =1
2
→
{
sin 𝛼 = 0
cos𝛼 = √1
2=
√2
2
cos 𝛼 = −√1
2= −
√2
2
→ {
𝛼 = 0°; 𝛼 = 180° − 0° = 180° (sin(180° − 𝛼) = sin 𝛼)
𝛼 = 45°; 𝛼 = −45° = 315° (cos(−𝛼) = cos𝛼)
𝛼 = 135°; 𝛼 = −135° = 225° (cos(−𝛼) = cos𝛼)
NOTA: en ocasiones aparecen soluciones ficticias, así que hay que COMPROBAR todas las
soluciones.

8
Tema 5.- Números complejos
1.- Expresión de un número complejo
Forma binómica Forma cartesiana Forma polar Forma trigonométrica
𝑎 + 𝑏𝑖 (𝑎, 𝑏) 𝑟𝛼 𝑟(cos 𝛼 + 𝑖 sin 𝛼)
Para representar gráficamente un número complejo, se utiliza la forma cartesiana.
Pasar de forma binómica a forma cartesiana y viceversa es inmediato. Lo mismo con las
formas polar y trigonométrica.
Para pasar de forma binómica a forma polar: 𝑟 = √𝑎2 + 𝑏2 tan𝛼 =𝑏
𝑎
Para pasar de forma polar a forma binómica: 𝑎 = 𝑟 cos 𝛼 𝑏 = 𝑟 sin 𝛼
2.- Operaciones con números complejos
2.1.- Forma binómica
La suma, resta y multiplicación son iguales que la suma, resta y multiplicación de polinomios
de primer grado (hay que tratar la 𝑖 como si fuera la 𝑥 de un polinomio).
Uno de los casos de racionalización consistía en multiplicar numerador y denominador por el
conjugado del denominador, para así eliminar las raíces del denominador. Para dividir
números complejos en forma binómica se hace exactamente lo mismo, solo que esta vez lo
que se elimina del denominador es la 𝑖.
2.2.- Forma polar
Multiplicación: 𝑟𝛼 · 𝑟′𝛽 = (𝑟 · 𝑟′)𝛼+𝛽
División: 𝑟𝛼
𝑟′𝛽= (
𝑟
𝑟′)𝛼−𝛽
Para hallar potencias y radicales de un número complejo se utiliza la fórmula de Moivre:
(cos 𝛼 + 𝑖 sin 𝛼)𝑛 = cos 𝑛𝛼 + 𝑖 sin 𝑛𝛼
Potencia: (𝑟𝛼)𝑛 = (𝑟𝑛)𝑛𝛼
Radicales: Hay que tener en cuenta que √𝑟𝛼𝑛
tiene SIEMPRE 𝑛 soluciones. Todas
ellas tienen el mismo módulo, √𝑟𝑛
; y sus argumentos son 𝛼
𝑛, 𝛼+360°
𝑛, 𝛼+2·360°
𝑛, 𝛼+3·360°
𝑛,
…, 𝛼+(𝑛−1)360°
𝑛. Es decir:
√𝑟𝛼𝑛 = {(√𝑟
𝑛)𝛼+𝑘·360°
𝑛
/ 𝑐𝑜𝑛 𝑘 = 0,1,2, … , 𝑛 − 1}

9
Tema 6.- Vectores
Los vectores son flechas que van desde un punto de origen, 𝐴, hasta un punto de destino
(extremo del vector), 𝐵. Tienen un módulo (distancia entre 𝐴 y 𝐵), una dirección (la recta en
la que se encuentra) y un sentido (una recta tiene dos sentidos).
Puede haber varios vectores con distintos puntos de origen, pero si tienen el mismo módulo,
dirección y sentido, se dice que esos vectores son iguales.
1.- Base y coordenadas
Dos vectores son linealmente dependientes (l.d.) si tienen la misma dirección.
Dos vectores son linealmente independientes (l.i.) si NO tienen la misma dirección.
Una base consiste en dos vectores l.i. Cualquier vector puede expresarse como combinación
lineal de los dos vectores de la base. Si los vectores de la base son perpendiculares, tenemos
una base ortogonal, y si además de ser perpendiculares tienen módulo 1, tenemos una base
ortonormal.
Si tenemos la base {�⃗�, �⃗�} y un vector �⃗⃗⃗�, existen dos números, 𝑎 y 𝑏, de forma que se cumple
que �⃗⃗⃗� = 𝑎�⃗� + 𝑏�⃗�. Estos números son únicos (no pueden haber otros dos números que
cumplan la igualdad) y se llaman coordenadas de �⃗⃗⃗� respecto de la base {�⃗�, �⃗�}. Es decir, en
esa base, �⃗⃗⃗� = (𝑎, 𝑏).
Si 𝐴(𝑎1, 𝑎2) y 𝐵(𝑏1, 𝑏2) son dos puntos, entonces:
𝐴𝐵⃗⃗⃗⃗ ⃗⃗ = 𝐵 − 𝐴 = (𝑏1, 𝑏2) − (𝑎1, 𝑎2) = (𝑏1 − 𝑎1, 𝑏2 − 𝑎2)
son las coordenadas de 𝐴𝐵⃗⃗⃗⃗ ⃗⃗ respecto de la base canónica {(1,0), (0,1)}, aunque se dice
únicamente que son las coordenadas de 𝐴𝐵⃗⃗⃗⃗ ⃗⃗ .
2.- Operaciones con las coordenadas de un vector
Si 𝑎 y 𝑏 son dos números, y �⃗⃗� = (𝑢1, 𝑢2) y �⃗� = (𝑣1, 𝑣2) son dos vectores:
Suma y resta: �⃗⃗� ± �⃗� = (𝑢1 ± 𝑣1, 𝑢2 ± 𝑣2) Multiplicación por un número: 𝑎�⃗⃗� = (𝑎𝑢1, 𝑎𝑢2) Combinación lineal: 𝑎�⃗⃗� ± 𝑏�⃗� = (𝑎𝑢1 ± 𝑏𝑣1, 𝑎𝑢2 ± 𝑏𝑣2) Producto escalar: �⃗⃗� · �⃗� = 𝑢1𝑣1 + 𝑢2𝑣2
Módulo: |�⃗⃗�| = √𝑢12 + 𝑢2
2 (= √�⃗⃗� · �⃗⃗�)
Ángulo entre vectores: cos(�⃗⃗�, �̂⃗�) =�⃗⃗⃗�·�⃗⃗�
|�⃗⃗⃗�||�⃗⃗�| (=
𝑢1𝑣1+𝑢2𝑣2
√𝑢12+𝑢2
2√𝑣12+𝑣2
2)
Los vectores �⃗⃗� y �⃗� son l.d. únicamente cuando existe algún número, 𝑘, de forma que �⃗⃗� = 𝑘�⃗�.
Los vectores �⃗⃗� y �⃗� son perpendiculares únicamente cuando �⃗⃗� · �⃗� = 0. Si queremos hallar un
vector perpendicular a �⃗� = (𝑥1, 𝑥2), se cambia el orden de las coordenadas, se cambia el
signo de una de ellas, y se multiplica todo el vector por cualquier número. Por ejemplo, un
vector perpendicular a �⃗� = (3, 1) es (−1, 3), o (−2, 6), … o (1, −3), o (2, −6), …

10
Tema 7.- Geometría analítica. Problemas afines y métricos
1.- Algunas aplicaciones de vectores
1.1.- Comprobación de que tres puntos están alineados
Los tres puntos 𝐴, 𝐵 y 𝐶, están alineados si los vectores 𝐴𝐵⃗⃗⃗⃗ ⃗⃗ y 𝐴𝐶⃗⃗⃗⃗⃗⃗ son l.d. De lo contrario (los
vectores son l.i.), los tres puntos forman un triángulo.
1.2.- Punto medio de un segmento
Como 𝐴𝑀⃗⃗⃗⃗ ⃗⃗⃗ = 𝑀𝐵⃗⃗ ⃗⃗ ⃗⃗ ⃗, tenemos que 𝑀 − 𝐴 = 𝐵 −𝑀. Es
decir, 2𝑀 = 𝐴 + 𝐵 y por tanto: 𝑀 =𝐴+𝐵
2.
1.3.- Simétrico de un punto respecto de otro
Como 𝐴𝑀⃗⃗⃗⃗ ⃗⃗⃗ = 𝑀𝐴′⃗⃗⃗⃗⃗⃗⃗⃗⃗, tenemos que 𝐴𝑀⃗⃗⃗⃗ ⃗⃗⃗ = 𝐴′ − 𝑀. Es
decir: 𝐴′ = 𝑀 + 𝐴𝑀⃗⃗⃗⃗ ⃗⃗⃗ = 𝑀 +𝑀 − 𝐴 = 2𝑀 − 𝐴.
2.- Ecuaciones de la recta
Para obtener una recta, se necesita un vector director (vector que da la dirección de la recta)
y un punto (también se puede obtener la recta si se tienen dos puntos, ya que con ellos se
calcula el vector director).
2.1.- Obtener la recta a partir del vector director y un punto
Nombre Vector director Punto Ecuación
Ecuación vectorial (𝑣𝑥, 𝑣𝑦) (𝑥0, 𝑦0) (𝑥, 𝑦) = (𝑥0, 𝑦0) + 𝜆(𝑣𝑥, 𝑣𝑦)
Ecuaciones paramétricas (𝑣𝑥, 𝑣𝑦) (𝑥0, 𝑦0) {𝑥 = 𝑥0 + 𝜆𝑣𝑥𝑦 = 𝑦0 + 𝜆𝑣𝑦
Ecuación continua (𝑣𝑥, 𝑣𝑦) (𝑥0, 𝑦0) 𝑥 − 𝑥0𝑣𝑥
=𝑦 − 𝑦0𝑣𝑦
Ecuación implícita (𝑣𝑥, 𝑣𝑦) (𝑥0, 𝑦0) 𝑣𝑦𝑥 − 𝑣𝑥𝑦 + 𝐶 = 0 *
Ecuación explícita (𝑣𝑥, 𝑣𝑦) (𝑥0, 𝑦0) 𝑦 =𝑣𝑦
𝑣𝑥𝑥 + 𝑛 *
Ecuación punto-pendiente (𝑣𝑥, 𝑣𝑦) (𝑥0, 𝑦0) 𝑦 − 𝑦0 =𝑣𝑦
𝑣𝑥(𝑥 − 𝑥0)
* En estas ecuaciones hay que sustituir 𝑥 por 𝑥0 e 𝑦 por 𝑦0, y al despejar se obtienen 𝐶 o 𝑛.
Por ejemplo, si el vector director es �⃗� = (−1,−3) y el punto 𝑃(2,−1):
−3𝑥 + 𝑦 + 𝐶 = 0 → −3 · 2 + (−1) + 𝐶 = 0 → 𝐶 = 7 → −3𝑥 + 𝑦 + 7 = 0

11
2.2.- Obtener el vector director y un punto a partir de la recta
Nombre Ecuación Vector director Punto
Ecuación vectorial (𝑥, 𝑦) = (𝑥0, 𝑦0) + 𝜆(𝑣𝑥, 𝑣𝑦) (𝑣𝑥 , 𝑣𝑦) (𝑥0, 𝑦0)
Ecuaciones
paramétricas {𝑥 = 𝑥0 + 𝜆𝑣𝑥𝑦 = 𝑦0 + 𝜆𝑣𝑦
(𝑣𝑥 , 𝑣𝑦) (𝑥0, 𝑦0)
Ecuación continua 𝑥 − 𝑥0𝑣𝑥
=𝑦 − 𝑦0𝑣𝑦
(𝑣𝑥 , 𝑣𝑦) (𝑥0, 𝑦0)
Ecuación implícita 𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0
(−𝐵, 𝐴) ó
(𝐵,−𝐴)
(0, −𝐶
𝐵)
ó
(−𝐶
𝐴, 0)
Ecuación explícita 𝑦 = 𝑚𝑥 + 𝑛 (1,𝑚) (0, 𝑛) Ecuación punto-
pendiente 𝑦 − 𝑦0 = 𝑚(𝑥 − 𝑥0) (1,𝑚) (𝑥0, 𝑦0)
NOTA: En la ecuación implícita (también llamada ecuación general) se calcula cualquier
punto inventando una de las dos coordenadas, y sustituyéndola en la ecuación para despejar
la otra coordenada.
3.- Ángulo entre rectas
Es el ángulo que forman sus respectivos vectores directores.
4.- Posición relativa de dos rectas
Dos rectas pueden ser coincidentes, paralelas o incidentes (se cortan en un punto).
Si se resuelve el sistema de ecuaciones formado por dos rectas:
Si tiene solución única: las rectas son incidentes, y el punto donde se cortan es la
solución del sistema.
Si tiene infinitas soluciones: las rectas son coincidentes.
Si no tiene solución: las rectas son paralelas.
Por otro lado: si los vectores directores son l.d., las rectas son coincidentes o paralelas (para
distinguir estos casos se coge un punto de una de las rectas y se comprueba si cumple la
ecuación de la otra recta); y si los vectores son l.i., las rectas son incidentes (en particular,
cuando los vectores directores sean perpendiculares, las rectas también lo son).
En el caso de rectas en forma implícita, 𝑟 ≡ 𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0 y 𝑠 ≡ 𝐴′𝑥 + 𝐵′𝑦 + 𝐶′ = 0: si 𝐴
𝐴′≠
𝐵
𝐵′, las rectas son incidentes; si
𝐴
𝐴′=
𝐵
𝐵′≠
𝐶
𝐶′, las rectas son paralelas; y si
𝐴
𝐴′=
𝐵
𝐵′=
𝐶
𝐶′,
las rectas son coincidentes.
5.- Distancia de un punto a una recta
La distancia del punto 𝑃(𝑝1, 𝑝2) a la recta 𝑟 ≡ 𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0 es: 𝑑(𝑃, 𝑟) =|𝐴𝑝1+𝐵𝑝2+𝐶|
√𝐴2+𝐵2
12
Tema 8.- Lugares geométricos. Cónicas
1.- Lugares geométricos
Un lugar geométrico es un conjunto de puntos que cumplen una determinada condición.
La mediatriz de un segmento es el lugar geométrico de todos los puntos que están a la misma
distancia de un extremo del segmento que del otro.
La bisectriz de un ángulo es el lugar geométrico de todos los puntos que están a la misma
distancia de las rectas que forman el ángulo.
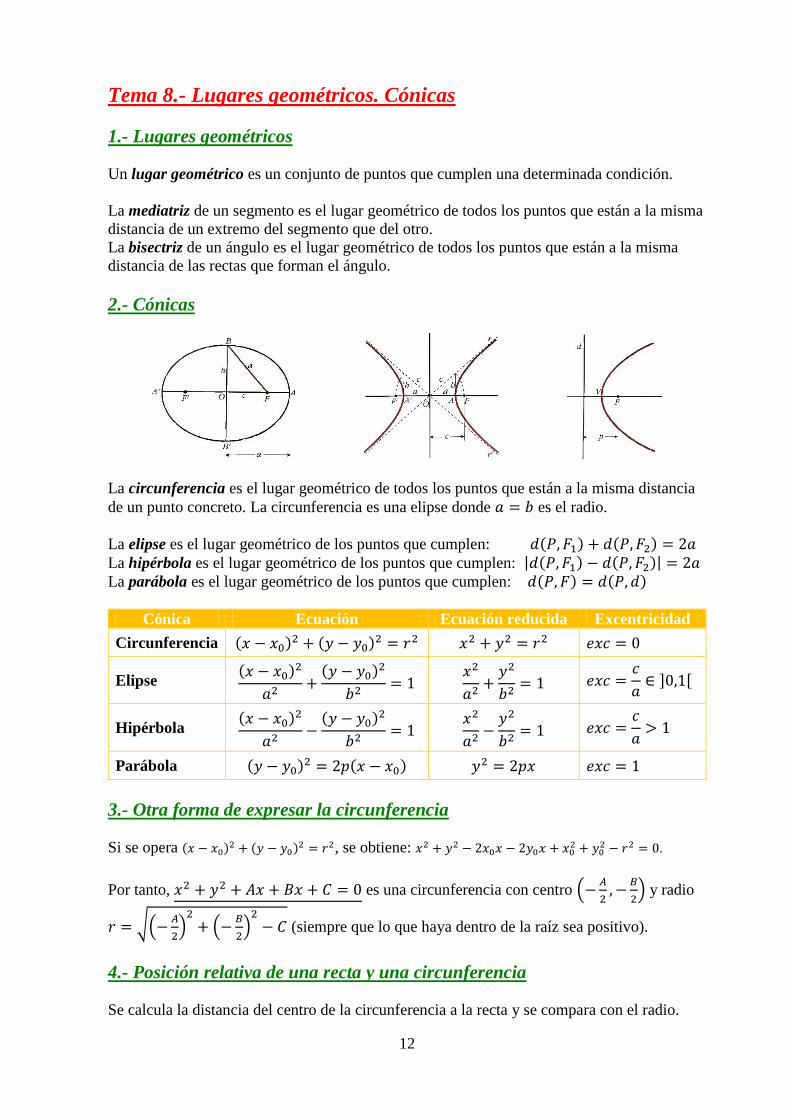
2.- Cónicas
La circunferencia es el lugar geométrico de todos los puntos que están a la misma distancia
de un punto concreto. La circunferencia es una elipse donde 𝑎 = 𝑏 es el radio.
La elipse es el lugar geométrico de los puntos que cumplen: 𝑑(𝑃, 𝐹1) + 𝑑(𝑃, 𝐹2) = 2𝑎
La hipérbola es el lugar geométrico de los puntos que cumplen: |𝑑(𝑃, 𝐹1) − 𝑑(𝑃, 𝐹2)| = 2𝑎
La parábola es el lugar geométrico de los puntos que cumplen: 𝑑(𝑃, 𝐹) = 𝑑(𝑃, 𝑑)
Cónica Ecuación Ecuación reducida Excentricidad
Circunferencia (𝑥 − 𝑥0)2 + (𝑦 − 𝑦0)
2 = 𝑟2 𝑥2 + 𝑦2 = 𝑟2 𝑒𝑥𝑐 = 0
Elipse (𝑥 − 𝑥0)
2
𝑎2+(𝑦 − 𝑦0)
2
𝑏2= 1
𝑥2
𝑎2+𝑦2
𝑏2= 1 𝑒𝑥𝑐 =
𝑐
𝑎∈ ]0,1[
Hipérbola (𝑥 − 𝑥0)
2
𝑎2−(𝑦 − 𝑦0)
2
𝑏2= 1
𝑥2
𝑎2−𝑦2
𝑏2= 1 𝑒𝑥𝑐 =
𝑐
𝑎> 1
Parábola (𝑦 − 𝑦0)2 = 2𝑝(𝑥 − 𝑥0) 𝑦2 = 2𝑝𝑥 𝑒𝑥𝑐 = 1
3.- Otra forma de expresar la circunferencia
Si se opera (𝑥 − 𝑥0)2 + (𝑦 − 𝑦0)
2 = 𝑟2, se obtiene: 𝑥2 + 𝑦2 − 2𝑥0𝑥 − 2𝑦0𝑥 + 𝑥02 + 𝑦0
2 − 𝑟2 = 0.
Por tanto, 𝑥2 + 𝑦2 + 𝐴𝑥 + 𝐵𝑥 + 𝐶 = 0 es una circunferencia con centro (−𝐴
2, −
𝐵
2) y radio
𝑟 = √(−𝐴
2)2
+ (−𝐵
2)2
− 𝐶 (siempre que lo que haya dentro de la raíz sea positivo).
4.- Posición relativa de una recta y una circunferencia
Se calcula la distancia del centro de la circunferencia a la recta y se compara con el radio.

13
Tema 9.- Funciones elementales
Una función asocia a cada número real de un conjunto, otro número real (solo uno).
Función polinómica: 𝑓(𝑥) = −2𝑥 + 3 (recta), 𝑓(𝑥) = 2𝑥2 + 7𝑥 − 5, (parábola) …
Función de proporcionalidad inversa: 𝑓(𝑥) =2𝑥+3
𝑥−8 (hipérbola)
Función radical: 𝑓(𝑥) = √𝑥, 𝑓(𝑥) = √𝑥 + 2, 𝑓(𝑥) = 7 − √𝑥 − 43
, …
Función exponencial: 𝑓(𝑥) = 2𝑥, 𝑓(𝑥) = 4−𝑥+5, …
Función logarítmica: 𝑓(𝑥) = log2 𝑥, 𝑓(𝑥) = log(𝑥 + 1), …
Función trigonométrica: 𝑓(𝑥) = sin 𝑥, 𝑓(𝑥) = tan 7𝑥, …
1.- Dominio y recorrido de funciones
El dominio de una función son todos los números del eje X en los que existe la función. En
general, el dominio són todos los números reales exceptuando aquellos que hacen que un
denominador sea 0, o que lo que hay dentro de una raíz de índice par sea negativo, o que lo
que hay dentro de un logaritmo sea negativo.
El recorrido de una función son todos los valores que toma la función en el eje Y.
2.- Funciones definidas a trozos
Son funciones que en intervalos distintos tienen expresiones distintas.
𝑓(𝑥) = {𝑥2 + 2𝑥 + 1 𝑠𝑖 𝑥 ≤ 0 1 𝑠𝑖 0 < 𝑥 < 4𝑥 − 3 𝑠𝑖 𝑥 ≥ 4
Si 𝑥 = 11 (11 ≥ 4), entonces el valor de la función es 𝑓(11) = 11 − 3 = 8
Si 𝑥 = −3 (−3 ≤ 0), entonces el valor de la función es 𝑓(−3) = (−3)2 + 2(−3) + 1 = 4
Si 𝑥 = 2 (0 < 2 < 4), entonces el valor de la función es 𝑓(2) = 1
3.- Valor absoluto de una función
La función |𝑓(𝑥)| se calcula hallando primero 𝑓(𝑥) y luego calculando el valor absoluto del
resultado. Gráficamente, se representa la función 𝑓(𝑥) y todo lo que quede por debajo del eje
X se cambia por su simétrico (respecto del eje X).
4.- Composición de funciones
Si 𝑓(𝑥) = 𝑥2 − 2𝑥 + 3 y 𝑔(𝑥) = 𝑒𝑥, entonces {(𝑓 ∘ 𝑔)(𝑥) = 𝑓(𝑔(𝑥)) = 𝑓(𝑒𝑥) = (𝑒𝑥)2 − 2𝑒𝑥 + 3
(𝑔 ∘ 𝑓)(𝑥) = 𝑔(𝑓(𝑥)) = 𝑔(𝑥2 − 2𝑥 + 3) = 𝑒𝑥2−2𝑥+3
.
5.- Función inversa
Para que una función tenga inversa debe ser inyectiva.
𝑓(𝑥) =2𝑥+3
𝑥−8 → 𝑦 =
2𝑥+3
𝑥−8 → 𝑥𝑦 − 8𝑦 = 2𝑥 + 3 → 𝑥 =
8𝑦+3
𝑦−2 → 𝑓−1(𝑥) =
8𝑥+3
𝑥−2

14
Tema 10.- Sucesiones
Una sucesión es un conjunto de números ordenados (no tiene porqué ser de menor a mayor
ni de mayor a menor) que tiene un primer elemento pero no tiene último (son infinitos
números). Cada elemento de una sucesión se llama término.
El término general de una sucesión es una expresión matemática que representa a TODOS
los números de la sucesión.
1.- Progresión aritmética
Sucesión en la que cada término se obtiene sumando al anterior una cantidad fija, llamada
diferencia de la progresión, d.
Término general: 𝑎𝑛 = 𝑎1 + (𝑛 − 1)𝑑
Suma de los 𝑛 primeros términos: 𝑆𝑛 =(𝑎1+𝑎𝑛)𝑛
2
2.- Progresión geométrica
Sucesión en la que cada término se obtiene multiplicando el anterior por una cantidad fija,
llamada razón de la progresión, r.
Término general: 𝑎𝑛 = 𝑎1 · 𝑟𝑛−1
Suma de los 𝑛 primeros términos: 𝑆𝑛 =𝑎𝑛·𝑟−𝑎1
𝑟−1=
𝑎1−𝑎𝑛·𝑟
1−𝑟
Suma de TODOS los términos cuando −1 < 𝑟 < 1: 𝑆∞ =𝑎1
1−𝑟
3.- Sucesiones recurrentes
Son sucesiones en las que cada término se obtiene haciendo cálculos con varios términos
anteriores. Es muy difícil obtener su término general.
Un ejemplo es la sucesión de Fibonacci: 1, 1, 2, 3, 5, 8, 13, …
4.- Límite de una sucesión
Si según 𝑛 va aumentanto, 𝑎𝑛 se va acercando a un número 𝐿: lim𝑛→∞
𝑎𝑛 = 𝐿
Si según 𝑛 va aumentanto, 𝑎𝑛 va creciendo sin parar: lim𝑛→∞
𝑎𝑛 = +∞
Si según 𝑛 va aumentanto, 𝑎𝑛 va decreciendo sin parar: lim𝑛→∞
𝑎𝑛 = −∞
Si según 𝑛 va aumentanto, 𝑎𝑛 va oscilando: no existe límite
5.- El número e
El número 𝑒 es el límite de la sucesión 𝑎𝑛 = (1 +1
𝑛)𝑛
y de la sucesión 𝑏𝑛 = (1 +1
−𝑛)−𝑛
. Es
decir:
lim𝑛→∞
(1 +1
𝑛)𝑛
= lim𝑛→∞
(1 +1
−𝑛)−𝑛
= 𝑒

15
Tema 11.- Límites de funciones. Continuidad
1.- Límite de una función en un punto
Si cuando 𝑥 va aumentando su valor desde un número inferior a 𝑎 hasta llegar a 𝑎, la función
va acercándose a un número, este número se representa por lim𝑥→𝑎−
𝑓(𝑥).
Si cuando 𝑥 va disminuyendo su valor desde un número superior a 𝑎 hasta llegar a 𝑎, la
función va acercándose a un número, este número se representa por lim𝑥→𝑎+
𝑓(𝑥).
Si la función va acercándose al mismo número tanto si 𝑥 va aumentando como disminuyendo
hasta llegar a 𝑎, entonces la función tiene límite:
lim𝑥→𝑎
𝑓(𝑥) = lim𝑥→𝑎−
𝑓(𝑥) = lim𝑥→𝑎+
𝑓(𝑥)
2.- Continuidad
La función 𝑓(𝑥) es continua en 𝑎 si tal punto pertenece al dominio de 𝑓(𝑥) y lim𝑥→𝑎
𝑓(𝑥) = 𝑓(𝑎).
Discontinuidad de salto infinito: alguno de los límites laterales es infinito.
Discontinuidad de salto finito: los dos límites laterales son finitos, pero distintos.
Discontinuidad evitable: los dos límites laterales son finitos y coinciden (por tanto,
existe el límite de la función: lim𝑥→𝑎
𝑓(𝑥)), pero 𝑓(𝑎) no existe o no coincide con el límite.
3.- Cálculo de límites
Si 𝑓(𝑥) es continua en 𝑎, entonces lim𝑥→𝑎
𝑓(𝑥) = 𝑓(𝑎).
lim𝑥→𝑎
𝑃(𝑥)
𝑄(𝑥), siendo 𝑃(𝑥) y 𝑄(𝑥) dos polinomios:
o Si 𝑄(𝑎) ≠ 0, entonces lim𝑥→𝑎
𝑃(𝑥)
𝑄(𝑥)=
𝑃(𝑎)
𝑄(𝑎).
o Si 𝑄(𝑎) = 0 y 𝑃(𝑎) ≠ 0, entonces se calculan los límites laterales para saber
si el límite es +∞, −∞ o no existe (límites laterales distintos).
o Si 𝑄(𝑎) = 0 y 𝑃(𝑎) = 0, entonces hay que simplificar la fracción antes de
calcular el límite.
4.- Límites en el infinito
Si según como 𝑥 va aumentando, la función va aumentando sin parar, se dice que
lim𝑥→+∞
𝑓(𝑥) = +∞. Y si va disminuyendo sin parar, lim𝑥→+∞
𝑓(𝑥) = −∞. Del mismo modo,
puede ocurrir que sea lim𝑥→−∞
𝑓(𝑥) = +∞ ó lim𝑥→−∞
𝑓(𝑥) = −∞.
Si según como 𝑥 va aumentando, la función va acercándose a un valor sin sobrepasarlo,
entonces lim𝑥→+∞
𝑓(𝑥) = 𝑘 y tenemos una asíntota horizontal en 𝑦 = 𝑘. Lo mismo puede
decirse si ocurre cuando 𝑥 va disminuyendo.
También puede ocurrir que los límites cuando 𝑥 → +∞ o 𝑥 → −∞ no existan.

16
5.- Cálculo de límites en el infinito
El límite de un polinomio cuando 𝑥 → +∞ o 𝑥 → −∞ es +∞ o −∞, dependiendo del
signo del coeficiente del término de mayor grado y del exponente de la 𝑥.
lim𝑥→+∞
𝑎𝑥𝑚+⋯
𝑏𝑥𝑛+⋯ o lim
𝑥→−∞
𝑎𝑥𝑚+⋯
𝑏𝑥𝑛+⋯:
o Si 𝑚 > 𝑛, entonces el límite es +∞ o −∞, dependiendo de los signos de 𝑎 y
𝑏 y de los exponentes 𝑚 y 𝑛.
o Si 𝑚 < 𝑛, entonces el límite es 0.
o Si 𝑚 = 𝑛, entonces el límite es 𝑎
𝑏, pero hay que considerar los signos
dependiendo de los exponentes 𝑚 y 𝑛.
6.- Asíntotas
6.1.- Asíntotas verticales
Si lim𝑥→𝑎
𝑓(𝑥) = ±∞, entonces existe una asíntota vertical en 𝑥 = 𝑎. En general, si 𝑓(𝑥) =𝑃(𝑥)
𝑄(𝑥),
las raíces de 𝑄(𝑥) forman asíntotas verticales.
6.2.- Asíntotas horizontales
Si lim𝑥→+∞
𝑃(𝑥)
𝑄(𝑥)= 𝑘, entonces existe una asíntota horizontal en 𝑦 = 𝑘. Lo mismo si lim
𝑥→−∞
𝑃(𝑥)
𝑄(𝑥)= 𝑘.
6.3.- Asíntotas oblicuas
Si el grado del polinomio 𝑃(𝑥) es exactamente una unidad más que el grado del polinomio
𝑄(𝑥), entonces 𝑃(𝑥)
𝑄(𝑥)= 𝑚𝑥 + 𝑛 +
𝑅(𝑥)
𝑄(𝑥) y tenemos una asíntota oblicua en 𝑦 = 𝑚𝑥 + 𝑛.
7.- Indeterminaciones
0
0: Se debe simplificar la fracción antes de calcular el límite.
∞−∞: Si son dos fracciones, se restan antes de calcular el límite; y si son radicales,
se multiplica y se divide por el conjugado de los radicales.
1∞: Si se está calculando el límite de 𝑓(𝑥)𝑔(𝑥), el límite será el número 𝑒 elevado al
límite de 𝑔(𝑥)(𝑓(𝑥) − 1).

17
Tema 12.- Derivadas
1.- Derivada de una función
La derivada de una función 𝑓(𝑥) en un punto 𝑥0 es, por definición: 𝑓′(𝑥0) = limℎ→0
𝑓(𝑥0+ℎ)−𝑓(𝑥0)
ℎ, y
gráficamente es la pendiente de la recta tangente a la función en ese punto.
La función derivada da directamente la derivada en cada punto: 𝑓′(𝑥) = limℎ→0
𝑓(𝑥+ℎ)−𝑓(𝑥)
ℎ.
2.- Tabla de derivadas
Función Derivada Función Derivada
(𝒇(𝒙))𝒏 𝑛 · (𝑓(𝑥))
𝑛−1· 𝑓′(𝑥)
𝒆𝒇(𝒙) 𝑒𝑓(𝑥) · 𝑓′(𝑥) 𝐥𝐧(𝒇(𝒙)) 1
𝑓(𝑥)· 𝑓′(𝑥)
𝒂𝒇(𝒙) ln 𝑎 · 𝑎𝑓(𝑥) · 𝑓′(𝑥) 𝐥𝐨𝐠𝒂(𝒇(𝒙)) 1
ln 𝑎·1
𝑓(𝑥)· 𝑓′(𝑥)
𝐬𝐢𝐧(𝒇(𝒙)) cos(𝑓(𝑥)) · 𝑓′(𝑥) 𝐚𝐫𝐜𝐬𝐢𝐧(𝒇(𝒙))
1
√1 − (𝑓(𝑥))2· 𝑓′(𝑥)
𝐜𝐨𝐬(𝒇(𝒙)) −sin(𝑓(𝑥)) · 𝑓′(𝑥) 𝐚𝐫𝐜𝐜𝐨𝐬(𝒇(𝒙)) −
1
√1 − (𝑓(𝑥))2· 𝑓′(𝑥)
𝐭𝐚𝐧(𝒇(𝒙))
[1 + tan2(𝑓(𝑥))] · 𝑓′(𝑥)
1
cos2(𝑓(𝑥))· 𝑓′(𝑥)
𝐚𝐫𝐜𝐭𝐚𝐧(𝒇(𝒙)) 1
1 + (𝑓(𝑥))2 · 𝑓
′(𝑥)
Operación Cálculo
Suma de funciones (𝑓(𝑥) + 𝑔(𝑥))′= 𝑓′(𝑥) + 𝑔′(𝑥)
Producto por un número (𝑎 · 𝑓(𝑥))′= 𝑎 · 𝑓′(𝑥)
Producto de funciones (𝑓(𝑥) · 𝑔(𝑥))′= 𝑓′(𝑥)𝑔(𝑥) + 𝑓(𝑥)𝑔′(𝑥)
División de funciones (𝑓(𝑥)
𝑔(𝑥))
′
=𝑓′(𝑥)𝑔(𝑥) − 𝑓(𝑥)𝑔′(𝑥)
(𝑔(𝑥))2
Regla de la cadena ((𝑓 ∘ 𝑔)(𝑥))′= (𝑓(𝑔(𝑥)))
′
= 𝑓′(𝑔(𝑥)) · 𝑔′(𝑥)
4.- Crecimiento y decrecimiento. Extremos relativos
Si 𝑓′(𝑥0) > 0, entonces 𝑓(𝑥) es creciente en 𝑥0.
Si 𝑓′(𝑥0) < 0, entonces 𝑓(𝑥) es decreciente en 𝑥0.
Si 𝑓′(𝑥0) = 0 o no existe, entonces 𝑓(𝑥) podría tener un máximo relativo o un mínimo
relativo en 𝑥0.
5.- Representación de funciones
1. Hallar el dominio y el recorrido.
2. Hallar los puntos de corte y el signo de la función.
3. Hallar las asíntotas.
4. Hallar los máximos y mínimos relativos, y el crecimiento y decrecimiento con la
derivada.

18
Tema 13.- Integrales
1.- Primitivas
Una primitiva, 𝐹(𝑥), de una función, 𝑓(𝑥), es otra función cuya derivada es 𝑓(𝑥), es decir,
𝐹′(𝑥) = 𝑓(𝑥). Si una función se puede integrar, entonces tiene infinitas primitivas. Por
ejemplo: ∫2𝑥𝑑𝑥 = 𝑥2 + 𝑘. Es decir, la función 𝑓(𝑥) = 2𝑥 tiene como primitivas 𝑥2 + 1,
𝑥2 + 2, …, 𝑥2 − 4, 𝑥2 + 4√2, …
2.- Propiedades de las integrales indefinidas
1. ∫[𝑓(𝑥) + 𝑔(𝑥)]𝑑𝑥 = ∫𝑓(𝑥)𝑑𝑥 + ∫𝑔(𝑥)𝑑𝑥
2. ∫ 𝑘𝑓(𝑥)𝑑𝑥 = 𝑘 ∫ 𝑓(𝑥)𝑑𝑥
3.- Integrales inmediatas
Integrales inmediatas Integrales inmediatas
∫(𝒇(𝒙))𝒏· 𝒇′(𝒙)𝒅𝒙 =
(𝒇(𝒙))𝒏+𝟏
𝒏 + 𝟏+ 𝒌
∫𝒆𝒇(𝒙) · 𝒇′(𝒙)𝒅𝒙 = 𝒆𝒇(𝒙) + 𝒌 ∫𝑓′(𝑥)
𝑓(𝑥)𝑑𝑥 = ln|𝑓(𝑥)| + 𝑘
∫𝐥𝐧𝒂 · 𝒂𝒇(𝒙) · 𝒇′(𝒙)𝒅𝒙 = 𝒂𝒇(𝒙) + 𝒌 ∫1
ln 𝑎·𝑓′(𝑥)
𝑓(𝑥)𝑑𝑥 = log𝑎|𝑓(𝑥)| + 𝑘
∫𝐜𝐨𝐬(𝒇(𝒙)) · 𝒇′(𝒙)𝒅𝒙 = 𝐬𝐢𝐧(𝒇(𝒙)) + 𝒌 ∫
𝑓′(𝑥)
√1 − (𝑓(𝑥))2𝑑𝑥 = arcsin(𝑓(𝑥)) + 𝑘
∫𝐬𝐢𝐧(𝒇(𝒙)) · 𝒇′(𝒙)𝒅𝒙 = −𝐜𝐨𝐬(𝒇(𝒙)) + 𝒌 ∫
−𝑓′(𝑥)
√1 − (𝑓(𝑥))2𝑑𝑥 = arccos(𝑓(𝑥)) + 𝑘
∫[𝟏 + 𝐭𝐚𝐧𝟐(𝒇(𝒙))] · 𝒇′(𝒙)𝒅𝒙
∫𝒇′(𝒙)
𝐜𝐨𝐬𝟐(𝒇(𝒙))𝒅𝒙
}
= 𝐭𝐚𝐧(𝒇(𝒙)) + 𝒌 ∫𝑓′(𝑥)
1 + (𝑓(𝑥))2 𝑑𝑥 = arctan(𝑓(𝑥)) + 𝑘
4.- Descomposición en fracciones simples
Si 𝑃(𝑥)
𝑄(𝑥) es una fracción algebraica con el grado de 𝑃(𝑥) menor que el de 𝑄(𝑥), se calculan las
raíces de 𝑄(𝑥) y:
4.1.- Raíces simples
Si las raíces de 𝑄(𝑥) son 𝑥1, 𝑥2, 𝑥3, …, hay que hallar 𝐴, 𝐵, 𝐶, …, de modo que
𝑃(𝑥)
𝑄(𝑥)=
𝐴
𝑥 − 𝑥1+
𝐵
𝑥 − 𝑥2+
𝐶
𝑥 − 𝑥3+⋯
4.2.- Raíces múltiples
Si las raíces de 𝑄(𝑥) son 𝑥1 doble y 𝑥2 (simple), hay que hallar 𝐴, 𝐵, 𝐶, …, de modo que
19
𝑃(𝑥)
𝑄(𝑥)=
𝐴
𝑥 − 𝑥1+
𝐵
(𝑥 − 𝑥1)2+
𝐶
𝑥 − 𝑥2
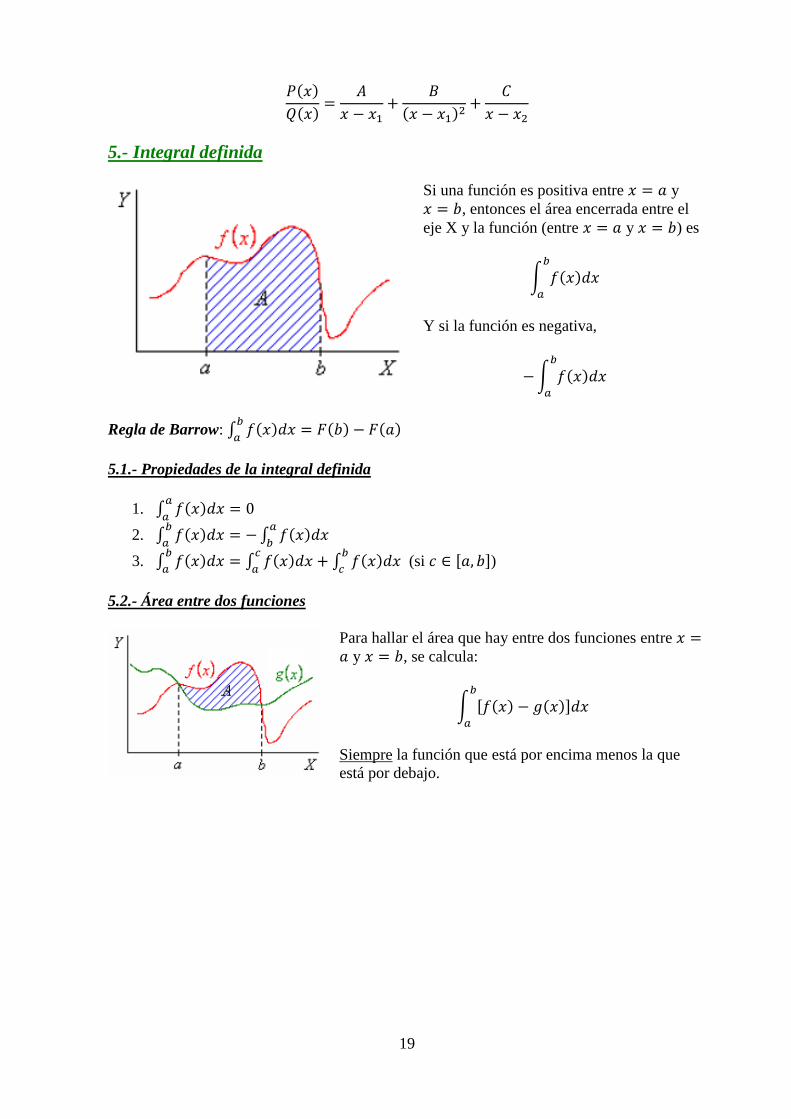
5.- Integral definida
Si una función es positiva entre 𝑥 = 𝑎 y
𝑥 = 𝑏, entonces el área encerrada entre el
eje X y la función (entre 𝑥 = 𝑎 y 𝑥 = 𝑏) es
∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎
Y si la función es negativa,
−∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎
Regla de Barrow: ∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎= 𝐹(𝑏) − 𝐹(𝑎)
5.1.- Propiedades de la integral definida
1. ∫ 𝑓(𝑥)𝑑𝑥𝑎
𝑎= 0
2. ∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎= −∫ 𝑓(𝑥)𝑑𝑥
𝑎
𝑏
3. ∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎= ∫ 𝑓(𝑥)𝑑𝑥
𝑐
𝑎+ ∫ 𝑓(𝑥)𝑑𝑥
𝑏
𝑐 (si 𝑐 ∈ [𝑎, 𝑏])
5.2.- Área entre dos funciones
Para hallar el área que hay entre dos funciones entre 𝑥 =𝑎 y 𝑥 = 𝑏, se calcula:
∫ [𝑓(𝑥) − 𝑔(𝑥)]𝑑𝑥𝑏
𝑎
Siempre la función que está por encima menos la que
está por debajo.
20
Tema 14.- Distribuciones bidimensionales
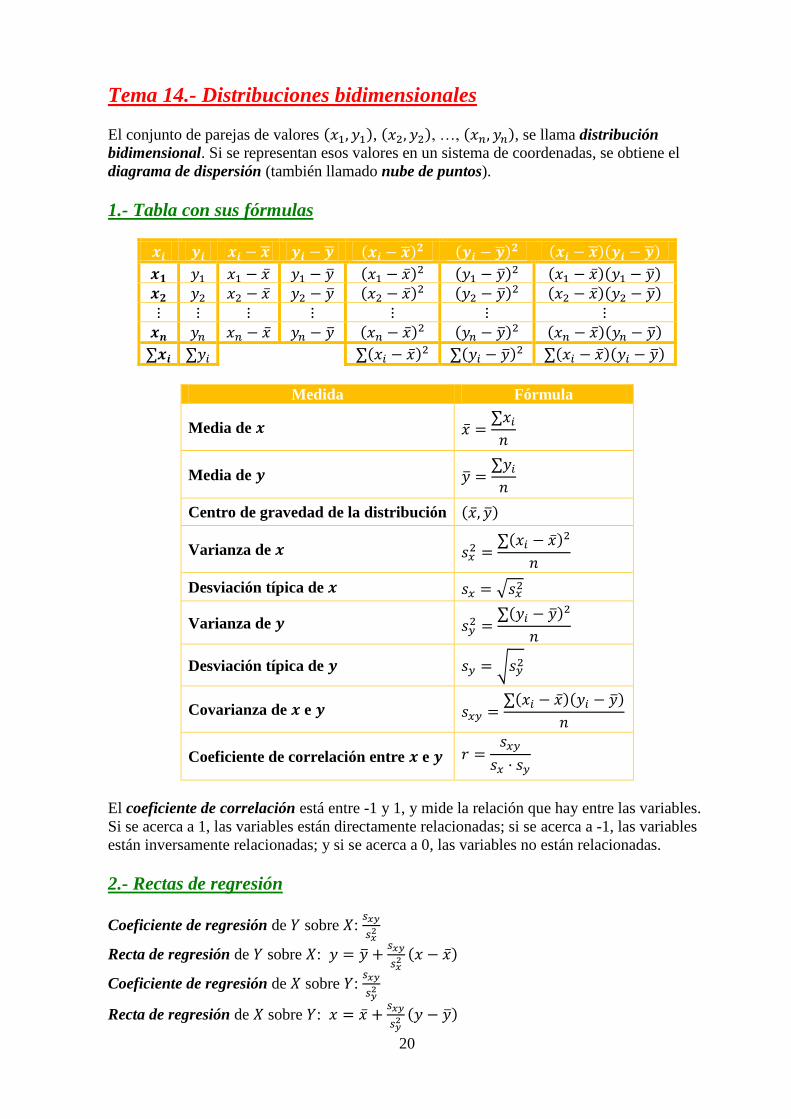
El conjunto de parejas de valores (𝑥1, 𝑦1), (𝑥2, 𝑦2), …, (𝑥𝑛, 𝑦𝑛), se llama distribución
bidimensional. Si se representan esos valores en un sistema de coordenadas, se obtiene el
diagrama de dispersión (también llamado nube de puntos).
1.- Tabla con sus fórmulas
𝒙𝒊 𝒚𝒊 𝒙𝒊 − �̅� 𝒚𝒊 − �̅� (𝒙𝒊 − �̅�)𝟐 (𝒚𝒊 − �̅�)
𝟐 (𝒙𝒊 − �̅�)(𝒚𝒊 − �̅�)
𝒙𝟏 𝑦1 𝑥1 − �̅� 𝑦1 − �̅� (𝑥1 − �̅�)2 (𝑦1 − �̅�)
2 (𝑥1 − �̅�)(𝑦1 − �̅�) 𝒙𝟐 𝑦2 𝑥2 − �̅� 𝑦2 − �̅� (𝑥2 − �̅�)
2 (𝑦2 − �̅�)2 (𝑥2 − �̅�)(𝑦2 − �̅�)
⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 𝒙𝒏 𝑦𝑛 𝑥𝑛 − �̅� 𝑦𝑛 − �̅� (𝑥𝑛 − �̅�)
2 (𝑦𝑛 − �̅�)2 (𝑥𝑛 − �̅�)(𝑦𝑛 − �̅�)
∑𝒙𝒊 ∑𝑦𝑖 ∑(𝑥𝑖 − �̅�)2 ∑(𝑦𝑖 − �̅�)
2 ∑(𝑥𝑖 − �̅�)(𝑦𝑖 − �̅�)
Medida Fórmula
Media de 𝒙 �̅� =∑𝑥𝑖𝑛
Media de 𝒚 �̅� =∑𝑦𝑖𝑛
Centro de gravedad de la distribución (�̅�, �̅�)
Varianza de 𝒙 𝑠𝑥2 =
∑(𝑥𝑖 − �̅�)2
𝑛
Desviación típica de 𝒙 𝑠𝑥 = √𝑠𝑥2
Varianza de 𝒚 𝑠𝑦2 =
∑(𝑦𝑖 − �̅�)2
𝑛
Desviación típica de 𝒚 𝑠𝑦 = √𝑠𝑦2
Covarianza de 𝒙 e 𝒚 𝑠𝑥𝑦 =∑(𝑥𝑖 − �̅�)(𝑦𝑖 − �̅�)
𝑛
Coeficiente de correlación entre 𝒙 e 𝒚 𝑟 =𝑠𝑥𝑦
𝑠𝑥 · 𝑠𝑦
El coeficiente de correlación está entre -1 y 1, y mide la relación que hay entre las variables.
Si se acerca a 1, las variables están directamente relacionadas; si se acerca a -1, las variables
están inversamente relacionadas; y si se acerca a 0, las variables no están relacionadas.
2.- Rectas de regresión
Coeficiente de regresión de 𝑌 sobre 𝑋: 𝑠𝑥𝑦
𝑠𝑥2
Recta de regresión de 𝑌 sobre 𝑋: 𝑦 = �̅� +𝑠𝑥𝑦
𝑠𝑥2 (𝑥 − �̅�)
Coeficiente de regresión de 𝑋 sobre 𝑌: 𝑠𝑥𝑦
𝑠𝑦2
Recta de regresión de 𝑋 sobre 𝑌: 𝑥 = �̅� +𝑠𝑥𝑦
𝑠𝑦2 (𝑦 − �̅�)

21
Tema 15.- Cálculo de probabilidades
1.- Definiciones
En un experimento aleatorio (como lanzar un dado), pueden obtenerse diferentes resultados.
El conjunto de todos los resultados posibles es el espacio muestral (1, 2, 3, 4, 5 y 6). Cada
posible resultado es un suceso elemental, y los conjuntos de sucesos elementales (sacar
número par, sacar más de 4, sacar número primo, …) se llaman simplemente sucesos.
Suceso imposible: suceso que NUNCA ocurre (sacar más de 6, sacar múltiplos de 7, …)
Suceso seguro: suceso que ocurre SIEMPRE, es decir, es el espacio muestral.
Unión de sucesos: ocurre un suceso O el otro.
Intersección de sucesos: ocurre un suceso Y el otro.
Diferencia de sucesos: ocurre un suceso Y NO ocurre el otro.
Complementario de un suceso: NO ocurre el suceso.
Sucesos incompatibles: sucesos que no pueden ocurrir al mismo tiempo.
La probabilidad siempre va de 0 a 1. La probabilidad del suceso imposible es 0, y la del
espacio muestral (suceso seguro) es 1.
𝑃(𝐴𝑐) = 1 − 𝑃(𝐴)
𝑃(𝐴 ∪ 𝐵) = 𝑃(𝐴) + 𝑃(𝐵) − 𝑃(𝐴 ∩ 𝐵)
Fórmula de Laplace: 𝑃(𝐴) =𝑛º 𝑑𝑒 𝑐𝑎𝑠𝑜𝑠 𝑓𝑎𝑣𝑜𝑟𝑎𝑏𝑙𝑒𝑠
𝑛º 𝑑𝑒 𝑐𝑎𝑠𝑜𝑠 𝑝𝑜𝑠𝑖𝑏𝑙𝑒𝑠
2.- Probabilidad condicionada
𝑃(𝐴/𝐵) =𝑃(𝐴 ∩ 𝐵)
𝑃(𝐵)
La probabilidad condicionada de 𝐴 sobre 𝐵 es la probabilidad de que ocurra 𝐴, si
consideramos que 𝐵 es el “nuevo” espacio muestral.
Los sucesos 𝐴 y 𝐵 son independientes si 𝑃(𝐴 ∩ 𝐵) = 𝑃(𝐴) · 𝑃(𝐵). En ese caso: {𝑃(𝐴/𝐵) = 𝑃(𝐴)
𝑃(𝐵/𝐴) = 𝑃(𝐵).
3.- Probabilidad total
Si se divide el espacio muestral en 𝑛 sucesos incompatibles, 𝐴1, 𝐴2, …, 𝐴𝑛, entonces:
𝑃(𝐵) = 𝑃(𝐵/𝐴1) · 𝑃(𝐴1) + 𝑃(𝐵/𝐴2) · 𝑃(𝐴2) + ⋯+ 𝑃(𝐵/𝐴𝑛) · 𝑃(𝐴𝑛)
4.- Fórmula de Bayes
Si se divide el espacio muestral en 𝑛 sucesos incompatibles, 𝐴1, 𝐴2, …, 𝐴𝑛, entonces:
𝑃(𝐴𝑖/𝐵) =𝑃(𝐵/𝐴𝑖) · 𝑃(𝐴𝑖)
𝑃(𝐵/𝐴1) · 𝑃(𝐴1) + 𝑃(𝐵/𝐴2) · 𝑃(𝐴2) + ⋯+ 𝑃(𝐵/𝐴𝑛) · 𝑃(𝐴𝑛)

22
Tema 16.- Distribuciones de probabilidad
Variable discreta: se pueden encontrar dos posibles valores consecutivos de la variable.
Variable continua: entre dos posibles valores de la variable hay infinitos posibles valores.
1.- Distribuciones de probabilidad de variable discreta
A cada valor se le asocia su probabilidad (se puede representar con un diagrama de barras).
Media: 𝜇 = ∑𝑥𝑖𝑝𝑖 Varianza: 𝜎2 = ∑(𝑥𝑖 − 𝜇)2𝑝𝑖 Desviación típica: 𝜎 = √𝜎2
1.1.- Distribución binomial
Un experimento dicotómico consiste en realizar un experimento y ver si ocurre un suceso o
no (éxito o fracaso). La probabilidad del éxito se expresa por 𝑝, y la del fracaso 𝑞 = 1 − 𝑝.
La distribución binomial consiste en realizar 𝑛 experimentos dicotómicos y contar los
éxitos. Se expresa 𝐵(𝑛, 𝑝). La fórmula de la probabilidad en una distribución binomial es:
𝑃[𝑥 = 𝑘] = (𝑛𝑘)𝑝𝑘𝑞𝑛−𝑘; media: 𝜇 = 𝑛𝑝; desviación típica: 𝜎 = √𝑛𝑝𝑞
2.- Distribuciones de probabilidad de variable continua
La función de probabilidad o función de densidad es una función que tiene la siguiente
propiedad: la probabilidad de que la variable tome un valor entre 𝑎 y 𝑏 es igual al área que
hay entre la función y el eje X entre 𝑥 = 𝑎 y 𝑥 = 𝑏. Por ello, esta función NUNCA es
negativa, y el área total que hay entre la función de densidad y el eje X es 1.
La función de distribución es una función de probabilidad acumulada. A cada valor, 𝑎, le
asocia la probabilidad de que la variable tome un valor menor o igual a 𝑎. Es decir, a cada
valor, 𝑎, le asocia el área que hay entre la función de densidad y el eje X desde su comienzo
hasta 𝑥 = 𝑎.
2.1.- Distribución normal
Su función de densidad es una campana de Gauss, más ancha o estrecha y más alta o baja
dependiendo de su media y su desviación típica. Se expresa 𝑁(𝜇, 𝜎).
Cuando la media es 0 y la desviación típica es 1, tenemos la distribución normal típica. Para
calcular probabilidades en 𝑁(0,1), se usa una tabla donde a partir de 𝑘, da 𝜙(𝑘) = 𝑃[𝑧 ≤ 𝑘],
siendo 𝑘 ≥ 0. Si se quiere calcular todo tipo de probabilidades, hay que tener en cuenta que:
𝑃[𝑧 ≤ 𝑘] = 𝜙(𝑘)
𝑃[𝑧 ≥ 𝑘] = 1 − 𝜙(𝑘)
𝑃[𝑧 ≤ −𝑘] = 𝑃[𝑧 ≥ 𝑘] = 1 − 𝜙(𝑘)
𝑃[𝑧 ≥ −𝑘] = 𝑃[𝑧 ≤ 𝑘] = 𝜙(𝑘)
Para calcular probabilidades en una distribución normal cualquiera, hay que tipificar la
variable:
𝑃[𝑎 ≤ 𝑥 ≤ 𝑏] = 𝑃 [𝑎 − 𝜇
𝜎≤ 𝑧 ≤
𝑏 − 𝜇
𝜎]







