Download - Lab 04 - Analisis de Señales - UNTECS

UNIVERSIDAD NACIONAL TECNOLOGICA DEL CONO SUR DE LIMA
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
INFORME 04
ANÁLISIS DE SEÑALES Y
SISTEMAS
SISTEMAS LINEALES E INVARIANTES
EN EL TIEMPO - LTI
Alumno: Código:
Marvin Thomas Concha Sandoval 2009200023
2012 – II

INTRODUCCIÓN A LOS SISTEMAS LTI
(LINEALES E INVARIANTES EN EL TIEMPO)
Se puede caracterizar un gran número de procesos físicos, con gran exactitud, como
Sistemas Lineales Invariantes con el Tiempo (LIT). Se consideran así a los sistemas
que cumplen las 2 propiedades que su nombre dice: Linealidad e Invariabilidad en el
tiempo.
Linealidad. Un sistema es lineal si satisface el principio de superposición, que engloba
las propiedades de escalado (homogeneidad) y aditividad. Que sea lineal (L) significa
que cuando la entrada de un sistema es escalada por un valor, la salida del sistema
también es escalada por la misma cantidad.
Invariabilidad. Un sistema es invariante con el tiempo si su comportamiento y sus
características son fijas. Esto significa que los parámetros del sistema no van
cambiando a través del tiempo y que por lo tanto, una misma entrada nos dará el
mismo resultado en cualquier momento (ya sea ahora o después).
En este laboratorio vamos a trabajar con sistemas LTI y, además, señales discretas,
que difieren en las continuas por que tienen valor para un tiempo n = 0, 1, 2, 3, … pero
no contándose el tiempo para fracciones de los mismos.
El tema de convolución se volverá a tocar.

APLICACIÓN 1
Vamos a usar la convolución de 2 señales, una x[k] y otra h[n].
La señal y[n] = x[k] * h[n]
Algoritmo:
% Convolucion de 2 señales k = -1:14; x = [0 1 1 1 1 1 1 1 1 1 1 0 0 0 0 0]; n = 0:5; h = [1 1 1 0 0 1]; % Graficamos Señal x[k]: figure(1), stem(k,x); title('x[k]'); % Graficamos Señal h[n]: figure(2), stem(n,h); title('h[n]'); y = conv(x,h); n = -1:19; % Graficamos Señal y[n] (convolucion) figure(3), stem(n,y(1:length(n))); title('y[n] = x[k] * h[n]');
Gráfica DE LAS SEÑALES:

Gráfica de la CONVOLUCIÓN:

APLICACIÓN 2
Vamos a usar la convolución de 2 señales, una x[n] y otra h[n].
La señal y[n] = x[n] * h[n]
Algoritmo:
% Señal x[n] x = ones(1,3); % Señal h[n] h = [1 2 3]; % Señal y[n] = x[n] * h[n] y = conv(x,h); n = 0:4; figure(1), stem(x); figure(2), stem(h); stem(n,y(1:length(n)));
Gráfica DE LAS SEÑALES:

Gráfica de la CONVOLUCIÓN:

APLICACIÓN 3 - A
Vamos a usar la convolución de 2 señales, una x[k] y otra h[n].
La señal y[n] = x[k] * h[n]
Algoritmo:
% Señal h[n] h = [0 0 0 0 0 0 0 0 0 0 (0.5)^0 (0.5)^1 (0.5)^2 (0.5)^3
(0.5)^4 (0.5)^5]; figure(1), stem(h); % Señal x[n] x = 2*rand(1,10); figure(2), stem(x); % Señal y[n] y = conv(x,h); n = -10:5; figure(3), stem(n,y(1:length(n)));
Gráfica DE LAS SEÑALES:
Gráfica de la CONVOLUCIÓN:

APLICACIÓN 3 - B
Vamos a usar la convolución de 2 señales, una x[n] y otra h[n].
La señal y[n] = x[n] * h[n]
Algoritmo:
% Señal h[n] h = [1 1]; % Señal x[n] x = [8 0 5]; % Señal y[n] y = conv(x,h); n = 0:3; stem(n,y(1:length(n)));
Gráfica DE LA CONVOLUCIÓN:

APLICACIÓN 4
Vamos a usar la convolución:
Algoritmo:
h1 = [0 0 0 0 0 0 0 0 0 0 (-0.9)^0 (-0.9)^1 (-0.9)^2 (-0.9)^3
(-0.9)^4 (-0.9)^5 (-0.9)^6 (-0.9)^7 (-0.9)^8]; y1 = conv(x,h1); h2 = [sin((pi*-10)/8) sin((pi*-9)/8) sin((pi*-8)/8) sin((pi*-
7)/8) sin((pi*-6)/8) sin((pi*-5)/8) sin((pi*-4)/8) sin((pi*-
3)/8) sin((pi*-2)/8) sin((pi*-1)/8) sin((pi*0)/8)
sin((pi*1)/8) sin((pi*2)/8) sin((pi*3)/8) sin((pi*4)/8)
sin((pi*5)/8) sin((pi*6)/8) sin((pi*7)/8) sin((pi*8)/8)]; y2 = conv(x,h2); y3 = y1+y2; n = -10:17; stem(y3);
Gráfica DE LA CONVOLUCIÓN:

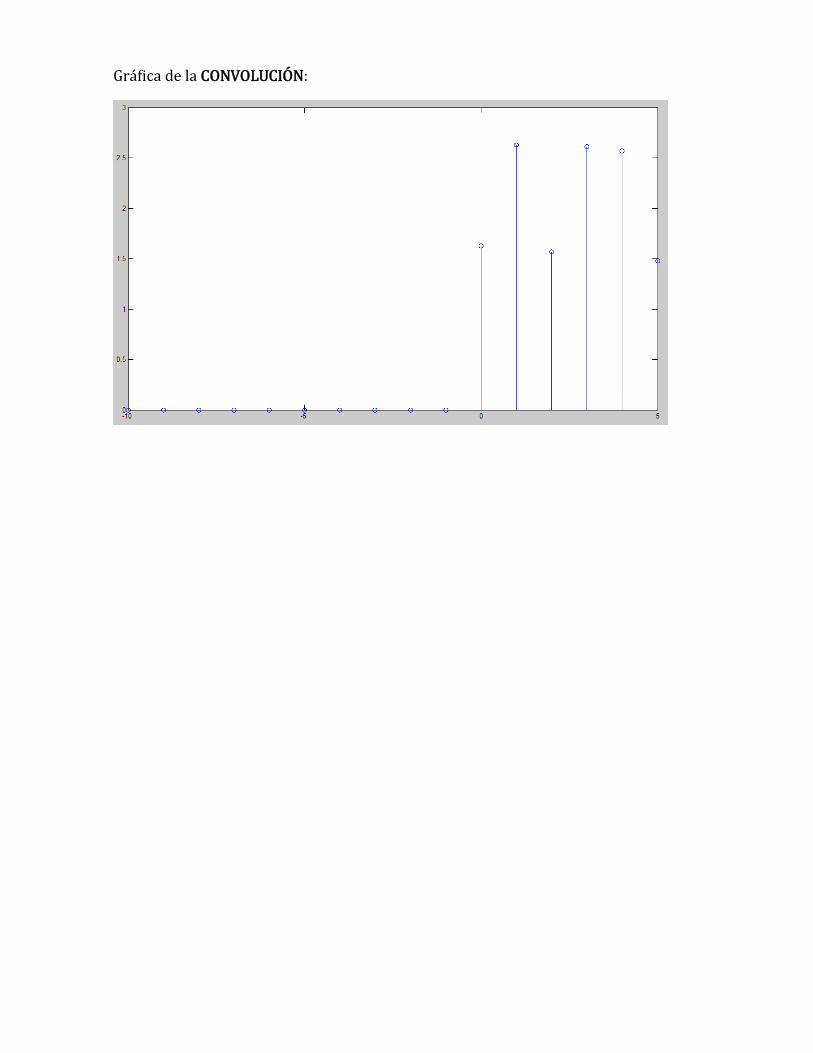
APLICACIÓN 5
Vamos a usar la convolución:
Algoritmo:
x = 2*rand(1,10); h1 = [0 0 0 0 0 0 0 0 0 0 (-0.9)^0 (-0.9)^1 (-0.9)^2 (-0.9)^3
(-0.9)^4 (-0.9)^5 (-0.9)^6 (-0.9)^7]; y1 = conv(x,h1); h2 = [sin((pi*-10)/8) sin((pi*-9)/8) sin((pi*-8)/8) sin((pi*-
7)/8) sin((pi*-6)/8) sin((pi*-5)/8) sin((pi*-4)/8) sin((pi*-
3)/8) sin((pi*-2)/8) sin((pi*-1)/8) sin((pi*0)/8)
sin((pi*1)/8) sin((pi*2)/8) sin((pi*3)/8) sin((pi*4)/8)
sin((pi*5)/8) sin((pi*6)/8) sin((pi*7)/8)]; y2 = conv(y1,h2); n = -10:33; % Grafica de la CONVOLUCION stem(n,y2(1:length(n)));
Gráfica DE LA CONVOLUCIÓN:
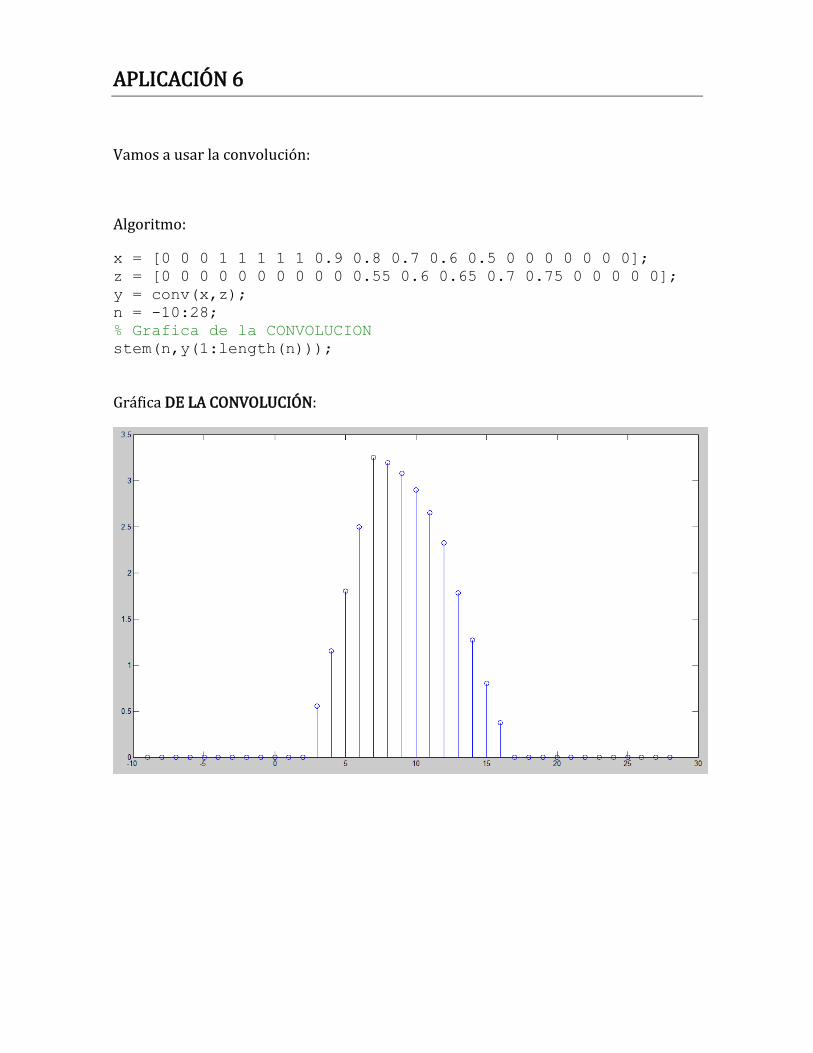
APLICACIÓN 6
Vamos a usar la convolución:
Algoritmo:
x = [0 0 0 1 1 1 1 1 0.9 0.8 0.7 0.6 0.5 0 0 0 0 0 0 0]; z = [0 0 0 0 0 0 0 0 0 0 0.55 0.6 0.65 0.7 0.75 0 0 0 0 0]; y = conv(x,z); n = -10:28; % Grafica de la CONVOLUCION stem(n,y(1:length(n)));
Gráfica DE LA CONVOLUCIÓN:







