
Implementación De Datos Lidar Para La Detección De Cambios En El Proceso De
Actualización Catastral Caso De Estudio Zona Piloto Municipio De Chía
Juan David Aldana Corredor
Universidad Distrital Francisco José De Caldas
Facultad De Ingeniería
Ingeniería Catastral Y Geodesia
2018

Implementación De Datos Lidar Para La Detección De Cambios En El Proceso De
Actualización Catastral Caso De Estudio Zona Piloto Municipio De Chía
Juan David Aldana Corredor
Proyecto De Grado en modalidad de Monografía
Como Requisito Para Optar
Por El Título De Ingeniero Catastral Y Geodesta
Director:
Carlos German Ramírez Ramos
Universidad Distrital Francisco José De Caldas
Facultad De Ingeniería
Ingeniería Catastral Y Geodesia
2018
3
Tabla De Contenido
1. Introducción .................................................................................................................... 11
2. Planteamiento Del Problema........................................................................................... 13
3. Justificación .................................................................................................................... 15
4. Objetivos ......................................................................................................................... 18
4.1 Objetivo General ......................................................................................................................... 18
4.2 Objetivos Específicos ................................................................................................................. 18
5. Estado del Arte ................................................................................................................ 19
6. Metodología .................................................................................................................... 22
Obtención De Información Y Software a utilizar ........................................................................ 22
Ortofotografías: ........................................................................................................................... 22
Software: ...................................................................................................................................... 23
6.3 Clasificación De La Nube De Puntos ......................................................................................... 23
6.4 Creación Del Modelo De Superficie ........................................................................................... 23
6.5 Aplicación De La Metodología De Resta De Modelos .............................................................. 24
6.6 Aplicación De Metodología De Identificación Por Medio De SIG ............................................ 24
6.7 Análisis de Resultados ................................................................................................................ 24
6.8 Verificación De Resultados En Campo ...................................................................................... 25
7. Marco Teórico ................................................................................................................. 26
7.1 Componentes y Montaje del sistema LiDAR SIGLAEYE ......................................................... 26
7.2 Planificación y Calibración del Vuelo ....................................................................................... 30
7.3 Ejecución del Vuelo, Captura y Control de calidad de la información. ...................................... 35
7.4 Procesado de la información LiDAR .......................................................................................... 39
8. Post – Proceso De Los Datos Lidar ................................................................................ 45
• Clasificación Automática Del Terreno ................................................................................... 45

4
• Clasificación Automática De Las Construcciones .................................................................. 50
• Depuración Manual De Datos Lidar ....................................................................................... 51
9. Conclusiones ................................................................................................................... 69
10. Bibliografía ..................................................................................................................... 70

5
Tabla De Ilustraciones
Ilustración 1. Google Earth ©. 2016, Sensor Pléiades. Zona Piloto de Estudio municipio de Chía. .......... 16
Ilustración 2. Aldana J. (2017) Fotografía. Sensor LiDAR Riegl VQ 480i, Bogotá. ................................. 26
Ilustración 3. Aldana J. (2017) Fotografía. Unidad de medición inercial (IMU). Bogotá. ......................... 27
Ilustración 4. Aldana J. (2017) Imagen. Movimientos de la Aeronave, Bogotá ......................................... 28
Ilustración 5. Aldana J. (2017) Fotografía Cámara de alto formato Hasselblad H4D, Bogotá. .................. 28
Ilustración 6. Aldana J. (2017) Fotografía, Sistema Combinado SIGLAEYE, Bogotá. ............................. 29
Ilustración 7. Aldana J. (2016) Fotografía, Montaje e instalación del sistema SIGLAEYE, Bogotá. ........ 29
Ilustración 8. Aldana J. (2016) Fotografía , Helicóptero HUGES HK-2941, Bogotá. ............................... 30
Ilustración 9. Aldana J. (2017). Grafico. Ubicación Político Espacial (Departamento – Municipio) ........ 31
Ilustración 10. Google Earth ©. 2017, Sensor Pléiades. Control de Calidad Visual de la Planificación de
vuelo sobre la Zona de estudio. Editada por Aldana Juan (2017). Bogotá. ...................................... 32
Ilustración 11. Aldana J. (2016) Fotografía. Torre de control Aeropuerto de Guaymaral, Bogotá. ........... 33
Ilustración 12. Recuperado de Informe de Calibración (2016). Medida Desplazamiento IMU–Antena
GNSS, SIGLA S.A.S. ....................................................................................................................... 34
Ilustración 13. Recuperado de Informe de Vuelos. (2016). Integración de planificaciones al sistema de
navegación de la aeronave, SIGLA S.A.S. ....................................................................................... 35
Ilustración 14. Recuperado de Informe de Vuelos. (2016). Sistema de control de Vuelo. SIGLA S.A.S .. 36
Ilustración 15. Recuperado de Informe de Vuelo. (2016). Ejecución del Vuelo Lidar, SIGLA S.A.S ...... 37
Ilustración 16. Google Earth ©. 2016, Sensor Pléiades. Grafico trayectoria aeronave, post ejecución del
vuelo, Editada por Aldana Juan (2017). Bogotá. .............................................................................. 38
Ilustración 17. Google Earth ©. 2016, Sensor Pléiades. Control de Calidad cobertura del Área del
Proyecto, Editada por Aldana Juan (2017), Bogotá. ......................................................................... 38
6
Ilustración 18. Aldana J. (2017) Captura de Pantalla. Procesamiento de Información en el Software de
Procesado, Bogotá. ........................................................................................................................... 40
Ilustración 19. Aldana J. (2017) Gráfico. Errores en Coordenadas Norte, Este y Altura (Combined, RMS),
Bogotá. .............................................................................................................................................. 41
Ilustración 20. Aldana J. (2017) Gráfico. Comportamiento de PDOP para el vuelo de proyecto, Bogotá. 42
Ilustración 21. Aldana J. (2017) Gráfico. Numero de Satélites para el vuelo Lidar, Bogotá. ..................... 42
Ilustración 22. Aldana J. (2017) Imagen. Código para Macro de Clasificación, Microstation, Bogotá. .... 45
Ilustración 23. Aldana J. (2017) Imagen. Ventana Clasificación por Clases, Microstation, Bogotá. ......... 45
Ilustración 24. Aldana J. (2017) Imagen. Ventana Deducción de líneas de Vuelo o Trayectorias,
Microstation, Bogotá. ....................................................................................................................... 46
Ilustración 25. Aldana J. (2017) Imagen. Ventana Cortar Solape, Microstation, Bogotá. .......................... 47
Ilustración 26. Aldana J. (2017) Imagen. Ventana Clasificación de Terreno, Microstation, Bogotá. ........ 48
Ilustración 27. Recuperada de UserGuide Terra Scan. Imagen. Metodo de Clasificacion por Angulo y
Distancia entre puntos, Bentley System Inc. .................................................................................... 49
Ilustración 28. Aldana J. (2017) Imagen. Nube de puntos Clasificada en Ground y Default, Microstation,
Bogotá. .............................................................................................................................................. 49
Ilustración 29. Aldana J. (2017) Imagen. Ventana Clasificación de Estructuras, Microstation, Bogotá. ... 50
Ilustración 30. Aldana J. (2017) Imagen. Nube de puntos Clasificada en Ground, Default y Building,
Microstation, Bogotá. ....................................................................................................................... 51
Ilustración 31. Aldana J. (2017) Imagen. Ventana Exportación de Modelo Digital de Superficies,
Microstation, Bogotá. ....................................................................................................................... 52
Ilustración 32. Aldana J. (2017) Imagen. Modelo Digital de Superficies, Microstation, Bogotá. .............. 53
Ilustración 33. Aldana J. (2017) Imagen. Herramienta de Transformación ASCII a Raster, ArctoolBox,
ArcGis, Bogotá. ................................................................................................................................ 53

7
Ilustración 34. Aldana J. (2017) Imagen. Clasificación de Estructuras por niveles de construcción, Bogotá.
.......................................................................................................................................................... 54
Ilustración 35. Aldana J. (2017) Imagen. Raster Clasificada por niveles de pisos construidos, ArcMap,
ArcGis, Bogotá. ................................................................................................................................ 54
Ilustración 36. Aldana J. (2017) Imagen. Herramienta para procesos de Algebra de Mapas, ArctoolBox,
ArcGis, Bogotá. ................................................................................................................................ 55
Ilustración 37. Aldana J. (2017) Imagen. Predios Resultado de la Resta de Modelos por algebra de mapas,
ArcMap, ArcGis, Bogotá. ................................................................................................................. 56
Ilustración 38. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 1 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 57
Ilustración 39. Aldana J. (2017) Fotografía. Predio 1 Municipio de Chía, Chía, Cundinamarca. .............. 57
Ilustración 40. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 2 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 58
Ilustración 41. Aldana J. (2017) Fotografía. Predio 2 Municipio de Chía, Chía, Cundinamarca. .............. 58
Ilustración 42. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 3 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 59
Ilustración 43. Aldana J. (2017) Fotografía. Predio 3 Municipio de Chía, Chía, Cundinamarca. .............. 59
Ilustración 44. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 4 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 60
Ilustración 45. Aldana J. (2017) Fotografía. Predio 4 Municipio de Chía, Chía, Cundinamarca. .............. 60
Ilustración 46. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 5 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 61
Ilustración 47. Aldana J. (2017) Fotografía. Predio 5 Municipio de Chía, Chía, Cundinamarca. .............. 61
Ilustración 48. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 6 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 62

8
Ilustración 49. Aldana J. (2017) Fotografía. Predio 6 Municipio de Chía, Chía, Cundinamarca. .............. 62
Ilustración 50. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 7 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 63
Ilustración 51. Aldana J. (2017) Fotografía. Predio 7 Municipio de Chía, Chía, Cundinamarca. .............. 63
Ilustración 52. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 8 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 64
Ilustración 53. Aldana J. (2017) Fotografía. Predio 8 Municipio de Chía, Chía, Cundinamarca. .............. 64
Ilustración 54. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 9 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 65
Ilustración 55. Aldana J. (2017) Fotografía. Predio 9 Municipio de Chía, Chía, Cundinamarca. .............. 65
Ilustración 56. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 10 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 66
Ilustración 57. Aldana J. (2017) Fotografía. Predio 10 Municipio de Chía, Chía, Cundinamarca. ............ 66
Ilustración 58. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 11 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 67
Ilustración 59. Aldana J. (2017) Fotografía. Predio 11 Municipio de Chía, Chía, Cundinamarca. ............ 67
Ilustración 60. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 12 Municipio de Chia.
Editada por Aldana Juan (2017). ...................................................................................................... 68
Ilustración 61. Aldana J. (2017) Fotografía. Predio 12 Municipio de Chía, Chía, Cundinamarca. ............ 68

9
Índice de Tablas
Tabla 1. Recuperado de Informe de Vuelos. (2015). Características Generales del vuelo LiDAR, SIGLA
S.A.S ................................................................................................................................................. 31
Tabla 2. Aldana J. (2017). Lever Arms del montaje en el Huges HK-2941 ............................................... 35
10
Glosario
LIDAR: (un acrónimo del inglés Light Detection and Ranging o Laser Imaging Detection and
Ranging) es una tecnología que permite determinar la distancia desde un emisor láser a un objeto
o superficie utilizando un haz láser pulsado.
MDT: (un acrónimo de Modelo Digital de Terreno) es una estructura numérica de datos que
representa la distribución espacial de una variable cuantitativa y continúa, en el que la variable
representada es la cota del terreno en relación a un sistema de referencia concreto.
MDS: (un acrónimo de Modelo Digital de Superficies) es una estructura numérica de datos
que representa la distribución espacial de una variable cuantitativa y continúa, en el que la
variable representada es la cota de todas las superficies sobre el terreno.
SIG: Sistema de Información Geográfica (SIG o GIS, en su acrónimo inglés [Geographic
Information System]) es una integración organizada de hardware, software y datos geográficos
diseñada para capturar, almacenar, manipular, analizar y desplegar en todas sus formas la
información geográficamente referenciada con el fin de resolver problemas complejos de
planificación y de gestión.
IGAC: Instituto Geográfico Agustín Codazzi, entidad encargada de producir, investigar,
reglamentar, disponer y divulgar la información geográfica, cartográfica, agrológica, catastral,
geodésica y de tecnologías geoespaciales.
SIGLA: Sistemas De Información Geográfica De Latino América, empresa encargada de
gestión de proyectos cartográficos y generadora de insumos necesarios para la realización de los
estudios y diseños geométricos, prediales y ambientales.

11
1. Introducción
La tecnología LiDAR desde hace algunos años se ha convertido en una herramienta de apoyo
a la hora de llevar a cabo proyectos de infraestructura y toma de decisiones en Colombia, a pesar
de esto no se han vislumbrado las diversas posibilidades que puede ofrecer este recurso.
Existen varios sistemas de captura LiDAR alrededor del mundo, entre ellos podemos
encontrar sensores móviles, cuyo montaje puede realizarse en una aeronave ya sea un avión o un
helicóptero, algunos montajes son de tipo terrestre adaptados desde automóviles hasta vagones
sobre vías férreas y por último los de tipo estacionario que puede colocarse a un trípode de
topografía.
Estos sistemas se encuentran compuestos por un sensor que emite un haz láser por
pulsaciones calculando distancias a cada objeto, la determinación de esta distancia es realizada a
partir del tiempo de retraso entre la emisión del pulso y su detección a través de la señal
reflejada, capturando de esta forma millones de puntos que pueden representar superficies junto
con todos los objetos que se encuentren sobre esta.
La nube de puntos LiDAR una vez capturada es únicamente una representación espacial de
coordenadas (X,Y,Z) que sometida a procesos algorítmicos automáticos puede generar
superficies en 3 dimensiones, para el caso de la geomática puede representar la superficie de la
tierra mediante modelos digitales de superficie (MDS), a partir de estos modelos podemos
obtener información tal como pendientes, áreas sujetas a inundación, generación de curvas de
nivel, volúmenes de tierra, delimitación de cuencas, entre otros.
En Colombia ya se ha utilizado la tecnología LiDAR para trabajos de infraestructura, algunos
ejemplos de esto son las concesiones viales como la doble calzada Ibagué – La Palma, Doble
calzada Bogotá – Villavicencio y Ruta del Sol entre otras, en estos proyectos se utilizó

12
información LiDAR como una herramienta a la base topográfica convencional y un soporte
cartográfico en la realización de planos y diseños para el desarrollo de nuevas vías o reparación
de vías existentes.
El proceso de actualización catastral es la renovación del censo o inventario de los predios
públicos y privados de un municipio donde se registran los cambios en la información jurídica,
física o económica de los inmuebles, Resolución 070 de 2011.Titulo III, Articulo 97 (IGAC,
2011), aunque este proceso nos permite registrar varios cambios en los inmuebles la tecnología
LiDAR solo nos proporcionara información de características físicas las cuáles serán en las que
se centrara este trabajo.
La finalidad del presente documento es utilizar los productos derivados de las nubes de datos
LiDAR de diferentes épocas para detectar cambios en estructuras físicas e incorporar estas
modificaciones en el proceso de actualización catastral tomando una zona urbana piloto en el
municipio de Chía. Como aporte significativo del estudiante a esta investigación es la adición de
la metodología de algebra de mapas, transformando estos modelos digitales de elevaciones en
imágenes raster, reclasificándolas y utilizando operaciones entre ellas mediante funciones
locales, con el fin de encontrar cambios en los datos como producto de la multitemporalidad de
la nube de puntos LiDAR.

13
2. Planteamiento Del Problema
Los inmuebles y sus características se encuentran en constante cambio ya sea por cambio de
normas o voluntad de sus propietarios, algunos de tema jurídico como transferencia de los
derechos de propietario o las que más nos interesan en este proyecto como las modificaciones
físicas de constructibilidad en los predios, por lo que se hace necesario registrar todos estas
alteraciones como cumplimiento a la ley 14 de 1983 y los lineamientos de la resolución 070 de
2011, modificada por la resolución 1055 de 2012 y complementada por la resolución 1008 de
2012 expedidas por el Instituto Geográfico Agustín Codazzi; los propietarios tienen la obligación
de manifestar las modificaciones que sufra su propiedad, ya que con esta información se
actualizan los planos de manzana o de zonas, se produce un nuevo avalúo y un nuevo impuesto.
Pero muchos no reportan estas novedades hasta que se realiza una nueva actualización catastral.
Para la detección de estas discrepancias a partir de los métodos de localización y actualización
vigentes se requiere una gran cantidad de recurso humano y de tiempo, visitando predio por
predio realizando un reconocimiento visual de alteraciones del inmueble, vemos necesaria la
implementación de nuevas tecnologías para la detección de cambios físicos en los predios ya
construidos o nuevos para agilizar el proceso de actualización catastral.
Con base a lo descrito con anterioridad, el siguiente estudio tiene como finalidad identificar
las posibilidades que presenta la tecnología LiDAR, elaborando modelos de superficie e
imágenes raster a partir de nubes de puntos y operándolos entre ellos, como una herramienta
optima en el proceso de actualización cartográfica catastral, para lo cual se tendrá como
prioridad responder los siguientes planteamientos:

14
¿Los derivados de la tecnología LiDAR son una alternativa a los métodos convencionales de
actualización catastral?
¿La operación entre imágenes raster a partir de modelos digitales de superficie es una
herramienta eficaz para la detección de cambios en zonas urbanas?

15
3. Justificación
Una de las principales misiones de la Ingeniería Catastral y Geodesia, es el reconocimiento de
los recursos naturales para el manejo adecuado de los mismos, por medio de tecnologías como
los sistemas de información geográfica SIG que permitan la generación o administración de
datos espaciales, que a su vez permiten determinar cuál es el adecuado aprovechamiento del
suelo y los cambios relacionados.
En un periodo de construcción masiva, podemos observar como los municipios localizados en
la periferia de la ciudad empiezan a tener un cambio estructural en normas de constructibilidad
dando mayor prioridad a la demanda de habitantes que comienzan a emigrar desde la ciudad a
los municipios aledaños, tendiendo esto en cuenta comienza una urbanización constante de
predios o cambios en las construcciones que deben ser detectados en los procesos de
actualización de los catastros de cada región, como es el caso del municipio de Chía.
El municipio de Chía está ubicado en la Sabana de Bogotá, a una altitud de 2600 msnm, con
área total de 79 km², de los cuales 17 km² corresponden al área urbana, fundado en el año 1537;
se encuentra delimitada por un sistema montañoso en el cual se destacan los cerros de Valvanera
y el Peñón, siendo la primera un atractivo turístico importante. Se caracteriza por ser uno de los
municipios más poblados de la sabana de Bogotá, donde se destacan urbanizaciones campestres
como Sindamanoy, Hacienda Fontanar y Santa Ana de Chía entre otras, el crecimiento del
municipio tanto en el casco urbano como en la zona rural debido a un proceso de conurbación
con la ciudad de Bogotá que se viene presentando desde años anteriores.
Para la realización de este proyecto de estudio se seleccionó un área designada como zona
piloto, tomada de vuelos de calibración del sensor, realizados con anterioridad en el municipio
por la empresa SIGLA S.A.S entre los años 2014 y 2016 estos vuelos son de uso exclusivo de la

16
empresa entregados al estudiante para realizar este proyecto ya que no tienen ninguna relación
comercial ni ningún fin empresariales que no sea el de investigación académica, estos vuelos
LiDAR tiene unas características de altura de la aeronave de 150 metros sobre el terreno y ancho
de pasadas de 340 metros de cobertura con una densidad de entre 20 a 25 puntos por metro
cuadrado, que nos permite delimitar la zona de estudio sesgada por la cobertura de la
información capturada en los vuelos de calibración como parte fundamental en proyectos de tipo
LiDAR, la zona seleccionada cumple con ciertas características como son un uso de suelo mixto
y variedad de edificaciones que dan como resultado un paisaje urbano; dicha zona de estudio se
encuentra comprendida por vías principales como la Carrera 10 y las Calles 2 y 7.
Ilustración 1. Google Earth ©. 2016, Sensor Pléiades. Zona Piloto de Estudio municipio de Chía. Imagen multiespectral, 2 metros de resolución, Editada por Aldana Juan (2017). Bogotá.
17
Según los datos obtenidos en el Informe de análisis predial del municipio de Chía 1999 –
2013 (Alcaldia Municipal de Chia, 2013), El municipio presenta desde años anteriores una alta
dinámica inmobiliaria, caracterizada en su mayoría por las subdivisiones prediales, producto de
las diferentes dinámicas como procesos sucesorales, sentencias judiciales, ventas comerciales
entre otras; el incremento poblacional en el municipio a su vez conlleva un crecimiento en el
desarrollo urbanístico de la zona rural y densificación en la zona urbana residencial, relacionadas
a las viviendas del tipo campestre y tradicional, por lo cual se hace necesario registrar de forma
lo más fidedigna posible los cambios presentados en años recientes y relacionarlos con la
cartografía catastral existente.

18
4. Objetivos
4.1 Objetivo General
Evaluar como los productos derivados de la tecnología LiDAR son una herramienta
alternativa para detectar cambios físicos en la zona urbana como aporte óptimo de recursos al
proceso de actualización catastral.
4.2 Objetivos Específicos
• Determinar cómo los datos LiDAR pueden ser una herramienta recomendable para
identificar cambios en estructuras físicas en las zonas urbanas de un municipio.
• Encontrar diferencias entre los datos capturados de diferentes épocas como
resultado de mutaciones físicas en los predios localizados en la zona de estudio.
• Comparar la metodología establecida en este documento con el método de
actualización convencional utilizado actualmente por el IGAC.
• Considerar esta alternativa tecnológica como una ayuda eficaz al proceso de
actualización catastral vigente para ser aplicado a nivel nacional.
19
5. Estado del Arte
En tiempos recientes el continuo crecimiento urbano, hace de la constante actualización
cartográfica una necesidad; para la cual la creación de nuevas metodologías en donde el uso de
herramientas como los sensores remotos se ha vuelto indispensable (Jung, 2004). A
continuacion se mencionan a diferentes autores cuyos trabajos son un aporte a las metodologias
de actualizacion catastral a partir de sensores remotos.
Una de las principales metodologías propuestas, se basa en la resta de modelos digitales de
superficie (MDS) de dos o más épocas anteriores con relación a un modelo actual realizado a
partir de datos LiDAR, como es el caso de (Vögtle y Steinle, 2004) en cuyo estudio detectan y
clasifican cambios en zonas urbanas después de un terremotos por medio de técnicas SIG y datos
obtenidos por medio de Sistemas LiDAR, este es una gran referente donde se utilizan nubes de
puntos multitemporales para realizar comparaciones.
Para la actualización de forma automática por medio de teledetección, se han realizado
interpretación de imágenes y una posterior comparación con la cartografía existente de años
anteriores, con el fin de localizar las áreas propensas a cambios, para posteriormente elaborar una
clasificación de las variables que permitan la actualización cartográfica como en el trabajo de
(Knudsen y Olsen, 2003). En su estudio Automated Change Detection for Updates of Digital
Map Database, quienes por medio del uso de fotografías aéreas detectaron cambios en las
edificaciones de la zona a estudiar.
Una de las formas más sencillas de realizar una actualización para el reemplazo de cartografía
obsoleta, consiste en extraer los edificios a partir de datos LiDAR u ortofotografías y realizar
comparaciones con la cartografía existente para detectar los cambios en la configuración urbana;
está separación de la infraestructura puede realizarse por medio de imágenes aéreas

20
multiespectrales, datos LiDAR u ortofotografías como lo presenta Sánchez Lopera y Lerma
García (Actualización de cartografía catastral urbana mediante LiDAR y SIG, 2012).
Autores como Rottensteiner (Automatic generation of building models from lidar data and the
integration of aerial images, 2003). Trinder (Disaster change detection using airborne LiDAR,
2011). Y Chaabouni-Chouayakhet et al. (3D Change detection inside urban areas using different
digital surface models. The International Archives of Photogrammetry and Remote Sensing,
2010). en sus trabajos elaboran una imagen comparativa a partir de Modelos Digitales de
Superficie previos para realizar una resta de alturas; ejemplo claro es el presente en el trabajo de
Chaabouni-Chouayakhet donde se pueden observar los cambios en la infraestructura de la
ciudad de Múnich en Alemania. Los mejores resultados son obtenidos de la utilización de
Modelos Digitales de Superficie generados a partir de datos LiDAR, combinados con imágenes
multiespectrales.
Otro de los usos de los datos LiDAR relacionado a los estudios de configuración urbana, es el
de evaluar el nivel de destrucción ocasionado por catástrofes natural para lo cual se usa una
escala básica que permita determinar las zonas afectadas donde la infraestructura haya sufrido
mayores daños (, Rehor et al, 2008; Trinder, 2011; Vögtle y Steinle, 2004).
Como metodología diferente a las expuestas anteriormente y aporte significativo del
estudiante se empleara el álgebra de mapas como herramienta de comparación, que consiste en el
conjunto de procedimientos y métodos que permiten llevar a cabo dicho análisis y extraer nuevos
valores a partir de los contenidos en una o varias capas en formato raster Tomlin (1989) dado su
estructura regular y sus características definidas que permiten plantear algoritmos y formulas
específicas, estos procedimientos serán aplicados sobre la información geográfica en formato
vectorial ya sea a partir de una capa, de dos o de un grupo de ellas; las funciones del álgebra de

21
mapas definen un marco formal de procesos dentro del cual se desarrollan los más diversos
análisis, Distinguimos cuatro tipos básicos de funciones: locales, focales, zonales y globales
(Tomlin, 1989).
En este caso las funciones a usar serán de tipo local que pueden definirse como aquellas que
trabajan en celdas individuales, estas calculan un grid de salida donde el valor de resultado en
cada posición está asociado con uno o más grids en esa misma posición. Es decir, el valor de una
celda individual, independientemente de los valores de las celdas que lo rodean, tiene una
influencia directa en el valor del grid de salida.
Una función local puede ser aplicada en un grid individual o en múltiples grids. Para una capa
individual, por ejemplo se pueden desarrollar funciones trigonométricas, (p.e. seno, exp, log
etc.), por otro lado se puede calcular la temperatura a partir de valores de altitud, ingresando el
grid en la variable dependiente: temp = 30 – 0.006 * altura
Ejemplos de funciones locales que trabajen en múltiples grids son aquellas que arrojan como
resultado el mínimo o el máximo para todos los valores existentes en los grids de una celda en
particular (Alfonso, 2013).

22
6. Metodología
El presente proyecto de grado, presentado en modalidad de monografía desea aportar
conceptos de ingeniería y ciencias de la tierra mediante el análisis de datos capturados por un
sensor láser de alta densidad, para la detección de cambios estructurales y físicos de los
inmuebles de una zona urbana.
Obtención De Información Y Software a utilizar
Nubes de puntos LiDAR: La empresa de ingeniería SIGLA S.A.S con alto desempeño en
adquisición e interpretación de datos geográficos se encarga de capturar insumos necesarios para
estudios geométricos, prediales y ambientales, esta compañía que está comprometida con
grandes causas sociales e investigación, como lo dice la misión en su página web www.sigla-
sas.com, me ha permitido estar en el proceso de un vuelo combinado LiDAR y Fotogrametría
para realizar el siguiente trabajo de grado como una metodología académica en la captura e
interpretación de datos por tecnologías que se encuentran a la vanguardia del mercado.
El scanner para la captura de la información es un Riegl VQ480i incorporado en un
helicóptero Hughes MD500, el cual despego según la planificación del vuelo desde el
Aeropuerto de Guaymaral en la periferia de la ciudad de Bogotá hasta la zona piloto de estudio
en el municipio de Chía. SIGLA suministró los datos igualmente de épocas anteriores para el
estudio ingenieril de detección de cambios, las nubes de puntos LiDAR son de dos periodos
diferentes en los años 2014 a 2016, el conjunto de datos pertenece a la zona urbana del municipio
de Chía, zona de calibración y control de calidad del sensor LiDAR.
Ortofotografías: De los vuelos realizados también es opcional el suministro de un conjunto
de imágenes georreferenciadas, capturadas por una cámara fotogramétrica de medio formato

23
Hasselblad H4D de 50 MP, que esta sincronizada con el sensor tomando información de la zona
piloto de estudio.
Software: Algunos de los programas para realizar este proyecto están licenciados para la
Universidad Distrital Francisco José de Caldas y otros fueron licencias en versiones
temporalmente gratuitas; Para la clasificación y manipulación de Datos LiDAR se utilizaron
módulos que corren sobre MICROESTACION licencia encontrada en la facultad de vivero, para
la manipulación de modelos digitales de elevación y sistemas de información geográfica se
realizaron en ARCGIS con sus complementos de Esri, estas licencias se encuentran en la
facultad de Ingeniería.
6.3 Clasificación De La Nube De Puntos
Para la clasificación de la nube de puntos será necesario definir unas rutinas de búsqueda de
los principales parámetros del relieve, utilizando las trayectorias de vuelo y establecidos los
parámetros idóneos para la zona urbana del área de estudio, iniciando con una clasificación
automática preliminar, diferenciando el terreno de las diferentes superficies encontradas.
Después la catalogación automática donde se genera una superficie de terreno, se procede a
realizar una clasificación detallada de forma manual, donde se separan las construcciones de
otros elementos como árboles, carros, y demás superficies en el terreno que puedan ser confusas
en el modelo de superficies. De igual forma se procurará parametrizar las construcciones para
ordenarlas de forma automática
6.4 Creación Del Modelo De Superficie
Una vez clasificada la nube de puntos LiDAR, se exportan estos puntos mediante
triangulación a un Modelos Digital de Superficie, donde se pueden observar detalladamente las

24
construcciones dependiendo de la resolución del modelo, las diferentes edificaciones tendrán su
respectiva alturas respectivas en una nube de coordenadas (XYZ), que representan la superficie
del terreno, se realizará una conversión de estos modelos a formato raster, para obtener así un
DEM (modelo de elevaciones) con los cuales se realizarán las diferentes funciones de análisis.
6.5 Aplicación De La Metodología De Resta De Modelos
La metodología a utilizar para detectar los cambios en las construcciones, será el álgebra de
mapas aplicada a las imágenes raster generadas como resultado del procesado de la nube de
puntos, utilizando una función local con operadores aritméticos de sustracción, se encontrarán
los cambios en las superficies y se identificaran aquellas construcciones que han sufrido
variaciones.
6.6 Aplicación De Metodología De Identificación Por Medio De SIG
La segunda parte de la metodología se base en hacer una estructuración mediante cartografía
urbana, para ubicar los predios que según nuestro análisis de modelos de elevación presentan una
variación en su construcción o aspecto físico, para georeferenciar y ubicar espacialmente dentro
de la zona urbana del municipio.
6.7 Análisis de Resultados
A partir de los productos generados a raíz de las comparaciones de la nube de puntos Lidar y
la cartografía existente se procederá a identificar aquellos predios donde existe un cambio en la
infraestructura del inmueble, se analizará cada uno de las edificaciones, los cambios que se
presentan en cada uno de los casos encontrados y su influencia en el desarrollo de Chía como
municipio que ha con altos índices de urbanización en los últimos años.

25
6.8 Verificación De Resultados En Campo
Una vez identificados los casos puntuales donde existe una variación física de un inmueble, se
realizará una confirmación visitando en campo los predios seleccionados, para sustentar la
veracidad de los resultados obtenidos con relación a lo encontrado en la zona de estudio, para lo
cual se recurrirá al uso de material fotográfico que apoye el proceso de comparación.
26
7. Marco Teórico
El siguiente apartado del presente documento tiene como objetivo explicar el procedimiento
realizado en la recolección de información del caso de estudio, su posterior evaluación y
verificación de la misma con el propósito de obtener resultados que sustenten la relevancia de los
sensores LiDAR en proceso de renovación cartográfica catastral.
7.1 Componentes y Montaje del sistema LiDAR SIGLAEYE
Para este trabajo se utilizó un sensor laser propiedad de la empresa SIGLA S.A.S compuesto
por la combinación de una cámara fotográfica de alto formato Hasselblad H4D de 50
Megapíxeles y sistema LiDAR Riegl VQ 480i de 550 KHz, ambos de última generación,
comercialmente llamado SIGLAEYE.
El funcionamiento del sistema SIGLAEYE es como cualquier otro sistema LiDAR
aerotransportado donde actúan en sincronía 4 o 5 elementos fundamentales para el caso de un
sistema combinado, como son:
• Sensor LiDAR
• Antena GNSS
• IMU
• CPU
• Cámara Fotogramétrica (Sistema combinado)
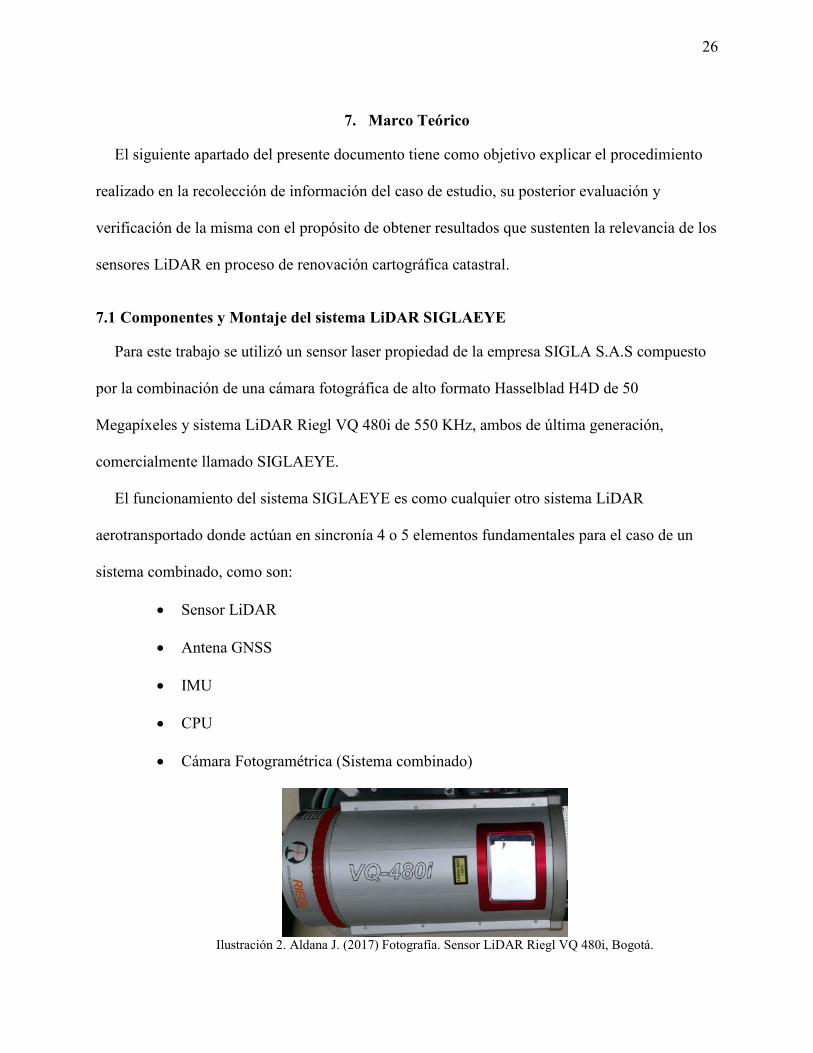
Ilustración 2. Aldana J. (2017) Fotografía. Sensor LiDAR Riegl VQ 480i, Bogotá.

27
El sensor LiDAR Riegl VQ 480i es un láser de escaneado lineal, su funcionamiento dispone
de un espejo rotatorio que va desviando el haz de luz, produciendo líneas paralelas en el terreno
como un patrón de captura a una velocidad de hasta 275.000 mediciones por segundo.
Una Antena GNSS que cumple la función de recibir la señal GPS en diferencial, para
determinar la altura y posición de la aeronave y de esta forma ir trazando la trayectoria del vuelo,
esta información es de vital importancia para el posterior procesado de los datos y
georreferenciación de la nube de puntos, este componente es el único que se encuentra fuera del
sistema SIGLAEYE y por lo general está ubicado al exterior de la aeronave para que la señal no
tenga interferencia.
Ilustración 3. Aldana J. (2017) Fotografía. Unidad de medición inercial (IMU). Bogotá.
La unidad de medición inercial o IMU por sus siglas en inglés, es el dispositivo central en el
cálculo inercial, que mide y calcula la velocidad, orientación de la aeronave, usando una
combinación de acelerómetros y giróscopos, Por lo tanto, es la encargada de corregir los
movimientos de la aeronave que se pueden presentar en los ejes X, Y y Z que se presentan
normalmente en cualquier vuelo como son, el alabeo, el cabeceo y la guiñada o mejor conocidos
internacionalmente en inglés como roll, pitch y heading un ejemplo de esto lo podemos apreciar
en la siguiente imagen.

28
Ilustración 4. Aldana J. (2017) Imagen. Movimientos de la Aeronave, Bogotá
La unidad central de procesamiento o CPU es la encargada de almacenar y recopilar toda la
información capturada de los demás dispositivos además de hacer el puente entre ellos para la
sincronía y ejecución del todo es sistema SIGLAEYE durante el vuelo.
Ilustración 5. Aldana J. (2017) Fotografía Cámara de alto formato Hasselblad H4D, Bogotá.
Adicionalmente ya que este es un sistema combinado encontramos una cámara de alto
formato Hasselblad H4D, esta toma fotografías de 50 Megapíxeles con la particularidad de tener
un software integrado con el cual es posible combinar imágenes tomadas a gran velocidad que
después de un proceso fotogramétrico permite realizar mosaicos.

29
Ilustración 6. Aldana J. (2017) Fotografía, Sistema Combinado SIGLAEYE, Bogotá.
Este sistema de reciente fabricación se encuentra siendo utilizado tanto en proyectos LiDAR
que implican estudios de corredores viales como, por ejemplo, la autopista Mulalo –
Loboguerrero, que se encuentra dentro de los proyectos de la ANI (Agencia Nacional de
Infraestructura), como en otros estudios que abarcan áreas extensas; cómo podemos observar en
la siguiente ilustración una de sus ventajas respecto a otros equipos es su sencilla posibilidad de
instalación en diversas aeronaves como helicópteros o avionetas, con certificado de tipo
complementario o STC por sus siglas en inglés.
Ilustración 7. Aldana J. (2016) Fotografía, Montaje e instalación del sistema SIGLAEYE, Bogotá.

30
La aeronave que realizo el vuelo de captura de información fue el Helicóptero HUGES
MD500 con matrícula HK 2941, color blanco/azul escogido teniendo en cuenta las
características de uso de suelo mixto y la orografía de la zona de estudio, este helicóptero cuenta
con todos los requisitos exigidos por la Aeronáutica Civil de Colombia y modificaciones para el
montaje de Sensores Remotos debidamente aprobadas.
Ilustración 8. Aldana J. (2016) Fotografía , Helicóptero HUGES HK-2941, Bogotá.
7.2 Planificación y Calibración del Vuelo
Una vez realizado el montaje del sensor en la aeronave, se inició la planificación del vuelo
delimitada por la ubicación de la zona a sobrevolar y en apoyo de la información geográfica
existente sobre Google Earth, se ejecuta el plan de vuelo teniendo presente las condiciones
geométricas que caracterizan el vuelo LiDAR como son la densidad de puntos por metro
cuadrado y tamaño mínimo de Pixel GSD como podemos observar en la tabla 1.
31
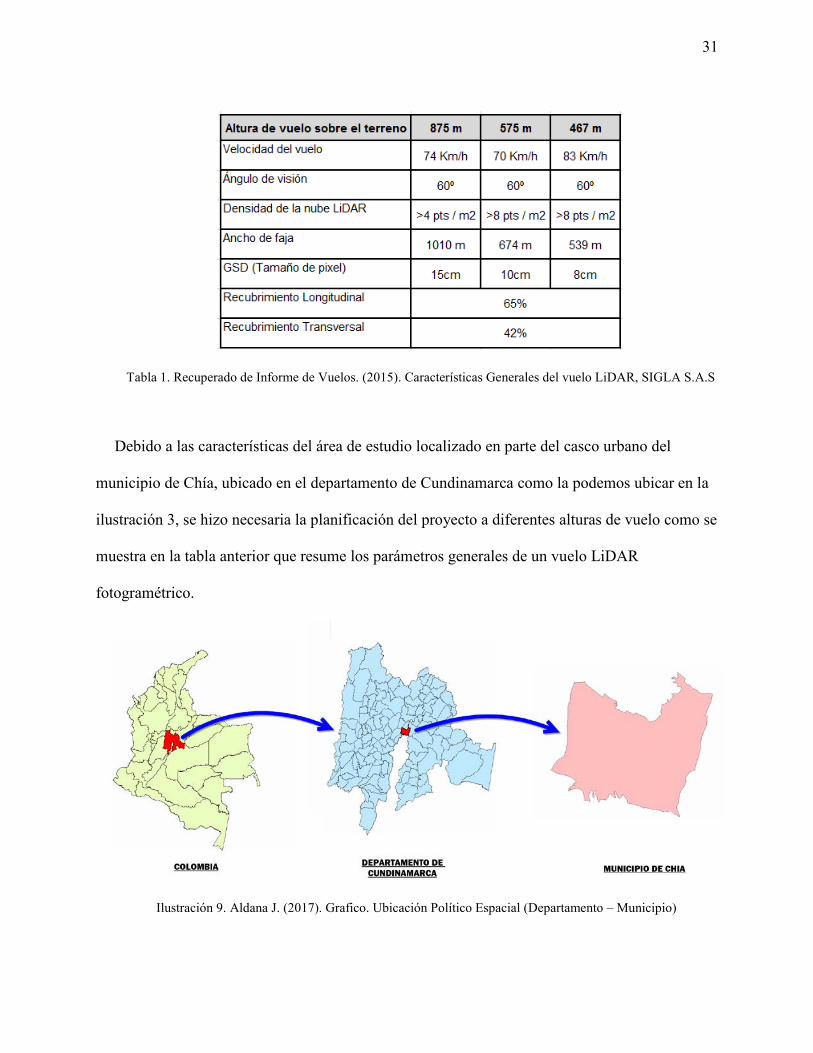
Tabla 1. Recuperado de Informe de Vuelos. (2015). Características Generales del vuelo LiDAR, SIGLA S.A.S
Debido a las características del área de estudio localizado en parte del casco urbano del
municipio de Chía, ubicado en el departamento de Cundinamarca como la podemos ubicar en la
ilustración 3, se hizo necesaria la planificación del proyecto a diferentes alturas de vuelo como se
muestra en la tabla anterior que resume los parámetros generales de un vuelo LiDAR
fotogramétrico.
Ilustración 9. Aldana J. (2017). Grafico. Ubicación Político Espacial (Departamento – Municipio)

32
Tras realizar la planificación, ésta se somete a un control de calidad para garantizar que se
cumplan las características exigidas; En este proceso las líneas de vuelo planificadas son
proyectados sobre un Modelo Digital de Elevaciones Global (SRTM) o sobre Google Earth,
obteniendo una base de datos confiable y un gráfico CAD que permite realizar un análisis visual
de la planificación.
Ilustración 10. Google Earth ©. 2017, Sensor Pléiades. Control de Calidad Visual de la Planificación de vuelo
sobre la Zona de estudio. Editada por Aldana Juan (2017). Bogotá.
El aeropuerto seleccionado para esta misión de vuelo es el Aeropuerto de Guaymaral ubicado en
la periferia de la ciudad de Bogotá, escogido en función de las siguientes características:
• Proximidad a la zona de estudio
• Servicios de asistencia y equipamientos adecuados. • Facilidades logísticas y de abastecimiento de combustible, teniendo en cuenta las horas de
vuelo planificadas.

33
Ilustración 11. Aldana J. (2016) Fotografía. Torre de control Aeropuerto de Guaymaral, Bogotá.
Una vez aceptada la planificación, las líneas de vuelo y coordenadas fueron transferidas a la
unidad de vuelos e integradas en el sistema de navegación de la Aeronave. Así mismo, en este
instante se realizó la gestión para la obtención de los permisos de vuelo teniendo en cuenta las
restricciones civiles y militares presentes en la zona.
Los permisos para la realización de los vuelos fotogramétricos fueron solicitados ante la
Aeronáutica Civil, enviado la delimitación de la zona de trabajo, fechas de actividad, aeropuertos
de despegue y aterrizaje, aeronaves participantes y datos de la compañía de vuelo.
Con la finalidad de lograr la mejor calidad de los parámetros de orientación externa, se realiza
un vuelo de calibración antes de ejecutar la misión de vuelo definitiva, esta calibración del
sistema inercial se realiza de forma periódica o siempre después de cualquier manipulación de la
cámara y el sensor LiDAR.
Mediante el vuelo de calibración se calcula la desalineación entre el sistema de coordenadas
de la IMU y los ejes de cada sistema. De forma general, se realiza la calibración del sistema
inercial para cada combinación Lidar/cámara/Helicóptero en los siguientes momentos:

34
• Previa al inicio de los vuelos. • Después de la manipulación de la Cámara/Lidar (cambio de Helicóptero, cambio de lentes
de la cámara, etc.) • En el caso de que entre campañas de vuelo haya transcurrido un intervalo de tiempo
considerable. • Al final del trabajo en caso de que se estime oportuno.
Por lo tanto, con esta calibración se tiende a corregir los desplazamientos entre los centros de
cada sistema tomando medidas o vectores llamados Lever Arms que se comprenden entre el
receptor/antena GNSS y la unidad inercial IMU, esta acción se realiza durante el montaje y para
ello se utilizó una estación total con medición de distancias por láser sin prisma.
Ilustración 12. Recuperado de Informe de Calibración (2016). Medida Desplazamiento IMU–Antena GNSS, SIGLA
S.A.S.
De la misma forma, es necesario medir los desplazamientos entre la IMU y el sensor LiDAR
y/o Cámara. Esto se lleva a cabo con ambos dispositivos montados en su posición final, con cinta
métrica.
Los vectores obtenidos entre la Antena GPS - IMU e IMU - Sensores, para el montaje
realizado sobre el helicóptero Hughes MD500 con matrícula HK 2941 son los siguientes:

35
Tabla 2. Aldana J. (2017). Lever Arms del montaje en el Huges HK-2941
Estas medidas nos permiten posteriormente en el procesado igual que en el procesamiento de
datos GPS llevar los centros del sensor al centro de la Antena para de esta forma darle
coordenadas y georreferenciar toda la nube de puntos.
7.3 Ejecución del Vuelo, Captura y Control de calidad de la información.
Posterior a un último control de calidad de la planificación realizada, se envía la planificación
y los permisos necesarios al departamento de vuelos, allí los planes de vuelo fueron integrados
tanto en el sistema de navegación del Helicóptero como en los sistemas de control de la cámara
fotogramétrica y LiDAR, quedando disponibles para el momento de ejecución del vuelo.
Ilustración 13. Recuperado de Informe de Vuelos. (2016). Integración de planificaciones al sistema de
navegación de la aeronave, SIGLA S.A.S.

36
Un factor importante antes de empezar a realizar la misión de vuelo es tener en cuenta la
información meteorológica, esta fue constantemente analizada con el fin de realizar las
operaciones de vuelo en condiciones meteorológicas óptimas para la realización de vuelos
fotogramétricos, es decir: Cielo limpio, ausencia de vientos fuertes, ausencia de nubes, brumas,
sombras, humo o cualquier elemento que pudiera afectar la calidad radiométrica de las
fotografías.
Antes de comenzar la misión de vuelo se realizan una serie de comprobaciones para garantizar
la exitosa realización de los trabajos de captura. Es necesario verificar que se dispone de toda la
información necesaria (Bases de datos de planificación, permisos de vuelo en regla, etc.) y el
correcto estado de los equipos fotogramétricos (Cámara y/o LiDAR, Sistemas GPS/INS, IMU,
etc.). Así mismo, para garantizar la seguridad del equipo humano encargado de realizar el vuelo
fotogramétrico se realizó una revisión del buen funcionamiento de los sistemas aeronáuticos
previa a cada misión de vuelo.
Ilustración 14. Recuperado de Informe de Vuelos. (2016). Sistema de control de Vuelo. SIGLA S.A.S

37
El vuelo LiDAR y la tripulación del Helicóptero está formada por un piloto y un operador. El
operador es el encargado del manejo del sensor LiDAR y la cámara, siendo el responsable de
comprobar el correcto funcionamiento de todos los sistemas implicados en el vuelo y de anotar
en un informe de vuelo cualquier incidencia ocurrida durante el mismo.
Posteriormente es verificado el correcto funcionamiento de los sistemas en el Helicóptero, se
procedió a la realización del vuelo.
Ilustración 15. Recuperado de Informe de Vuelo. (2016). Ejecución del Vuelo Lidar, SIGLA S.A.S
El producto final de la ejecución de la Misión de vuelo es el conjunto datos brutos LiDAR y/o
imágenes, fichero de observaciones GPS e IMU y fichero final de la trayectoria seguida por el
Helicóptero como podemos observar en la siguiente ilustración.

38
Ilustración 16. Google Earth ©. 2016, Sensor Pléiades. Grafico trayectoria aeronave, post ejecución del vuelo, Editada por Aldana Juan (2017). Bogotá.
Finalizado la misión de vuelo, se realizó la descarga de datos y control de calidad mediante la
generación de imágenes de intensidad con las cuales se verifica que el dato adquirido cubre la
zona objetivo como podemos observar en la ilustración 17.
Ilustración 17. Google Earth ©. 2016, Sensor Pléiades. Control de Calidad cobertura del Área del Proyecto, Editada por Aldana Juan (2017), Bogotá.

39
Igualmente en este control se comprueba la integridad de la información capturada durante la
sesión de vuelo. En este control se analizaron:
• Integridad de los datos brutos LiDAR: Se realizó una comparación entre el vuelo ejecutado contra la planificación, a partir del
ficheros generados por la unidad de control. Se analizó la correcta estructura de almacenamiento de datos: una carpeta por cada una
de las pasadas registradas secuencialmente. Se hizo una comprobación análoga para los datos inerciales asociados al instrumento
LiDAR. Numero de satélites disponibles durante el vuelo Ángulos respecto de la vertical durante las pasadas Balanceo durante los giros del Helicóptero (Que deben ser inferiores a 20º) Continuidad en la captura GPS/IMU
Estos datos son almacenados en discos duros externos, realizando una copia de seguridad
adicional para su posterior envío a las oficinas centrales de la empresa SIGLA S.A.S, donde el
estudiante realizo el postc- procesado de la información.
7.4 Procesado de la información LiDAR
En este numeral del presente trabajo explicaremos brevemente el procesado de los Datos
LiDAR, ya que el software utilizado es propiedad de la empresa encargada de realizar el vuelo y
son procesos automáticos.
Tras recibir los datos capturados durante la ejecución del vuelo, se realizó el procesado de los
mismos. A continuación, se describe los trabajos llevados a cabo para la obtención de la
trayectoria y Orientación Externa (OE) de los datos LiDAR.
La obtención de los parámetros de orientación externa se realizó en cuatro fases:
• Obtención de la trayectoria DGPS por técnicas diferenciales, es decir, a partir de los datos del GPS y las observaciones simultáneas de la estación de referencia GNSS y posicionamientos en tierra.
40
• Conocidos de forma previa los parámetros de calibración de los sensores, se calcula una trayectoria integrada que incluye información sobre la actitud del Helicóptero incorporando los datos de la IMU.
• Con la trayectoria integrada DGPS/IMU, se extraerán los parámetros de orientación externa para la nube de puntos. A estos parámetros de orientación externa se les aplicarán las correcciones locales derivadas de la proyección UTM: convergencia de meridianos en kappa y factor de escala en altura.
• Finalmente se lleva a cabo una fase de interpolación de la trayectoria antes obtenida con los parámetros de orientación externa en el momento exacto de la toma.
Como resultado de estos cálculos se obtuvieron:
• Trayectorias de vuelo (Fichero solución procedente del cálculo de trayectoria DGPS/IMU (Archivo *.trj y .txt “) Coordenadas de los centros de proyección con altitudes elipsoidales.
La información es procesada inicialmente en el software INERTIAL propiedad de SIGLA
S.A.S, programa en el cual define, calcula y procesa la trayectoria de la aeronave asociado a la
información obtenida por medio del receptor GNSS del helicóptero.
Ilustración 18. Aldana J. (2017) Captura de Pantalla. Procesamiento de Información en el Software de
Procesado, Bogotá.

41
El procesamiento geodésico de la información se realizó empleando el método denominado
“PPP” (Precise Point Positioning), el uso de esta metodología permite obtener una adecuada
precisión posicional de los datos al no contar con información geodésica de estaciones GNSS o
puntos de control en terreno. Los resultados del cálculo GPS/INS fueron sometidos a un control
de calidad directo mediante la evaluación de las precisiones resultantes, garantizando precisiones
inferiores a 2.5 cm (X, Y, Z)
La siguiente ilustración muestra el error medio cuadrático posicional en las coordenadas X, Y,
Z de la información geodésica del vuelo al ser procesado con PPP.
Los errores máximos encontrados durante todo el periodo del vuelo fueron de 0.02m en X
(coordenadas Este), 0.025m en Y (coordenadas Norte) y de 0.021m en Z (Altura).
Ilustración 19. Aldana J. (2017) Gráfico. Errores en Coordenadas Norte, Este y Altura (Combined, RMS),
Bogotá.

42
El PDOP (Positional Diluvian of Precision) hace referencia a la configuración geométrica de
los satélites en el momento de la captura de los datos por la antena del receptor GNSS en la
aeronave. Si este error se encuentra por debajo de 4 se considera un dato confiable.
Para el vuelo ejecutado el PDOP máximo que se obtuvo fue de 1.39.
Ilustración 20. Aldana J. (2017) Gráfico. Comportamiento de PDOP para el vuelo de proyecto, Bogotá.
Para el vuelo ejecutado el número mínimo de satélites observados por el sensor GNSS en
algún momento del vuelo fue de 16, lo cual proporciona información suficiente para los cálculos
de coordenadas.
Ilustración 21. Aldana J. (2017) Gráfico. Numero de Satélites para el vuelo Lidar, Bogotá.

43
Una vez corregida y calculada la trayectoria del vuelo bajo los procesos descritos
anteriormente, se ingresa esta información en el software RI Process encargado de procesar y
darle coordenadas a cada punto de los Datos LiDAR, Este programa pertenece a la misma casa
matriz del fabricante del sensor, RIEGEL.
La información necesaria para procesar la nube de puntos se compone de:
• Raw Laser: datos brutos procedentes del sensor en sistema WGS84. • Datos inerciales (GPS-IMU), procedentes del sistema inercial.
Con el fin de procesar los datos brutos a partir de la solución obtenida de la trayectoria,
definimos previamente el sistema de proyección sobre el que queremos obtener los datos
proyectados, en este caso sistema UTM 17 Norte.
Del procesado de datos, se obtienen como resultado ficheros binarios en formado *.LAS
(Laser Airborne Scanner), los cuales contienen información referente a coordenadas
planimétricas y altimétricas, intensidad, numero e información de retorno, ángulo de escaneo y
marca de tiempo de cada uno de los puntos, con los cuales se iniciará a continuación el análisis
que da origen al título de este trabajo de grado.
Los datos procesados corresponden a un vuelo realizado el 08 de Junio de 2016, pero para
poder detectar cambios como es la finalidad de este trabajo, SIGLA nos proporcionó datos en
otras épocas, teniendo un total de 4 nubes de puntos correspondientes a las siguientes fechas por
orden ascendente:
• 18 de Abril de 2014
• 07 de Noviembre de 2014
• 20 de Enero de 2015
• 06 de Junio de 2016

44
Estas cuatro nubes de puntos serán sometidas al mismo procedimiento de post-procesado
propuesto por el estudiante para la realización de este trabajo de grado.

45
8. Post – Proceso De Los Datos Lidar
Una vez obtenida la nube de puntos, georreferenciada, corregida en posición y altura por el
procesado anteriormente descrito, se dispuso a realizar la clasificación automática y manual por
medio de los módulos de TERRA SOLID que corren sobre MICROESTACION.
• Clasificación Automática Del Terreno
Para la clasificación automática inicial de los puntos LiDAR es necesario definir rutinas de
búsqueda de los principales parámetros del relieve, estas secuencias se denominan MACROS y
son una serie de pasos parametrizados para realizar acciones con la nube de puntos.
La MACRO1 será la encargada de definir el terreno y almacenándolo en la capa GROUND,
separándolo de todo aquello que pertenezca a superficies diferentes al suelo desnudo.
Ilustración 22. Aldana J. (2017) Imagen. Código para Macro de Clasificación, Microstation, Bogotá.
A continuación, describiremos el paso a paso de esta rutina:
En la primera línea de código encontramos una clasificación general, la nube de puntos
después de ser procesada está en clase 0 (Never Classified o Unclassified) así que en este primer
parámetro se le ordena al software clasificar la nube de puntos en la clase 1 Default mediante la
siguiente ventana de comando:
Ilustración 23. Aldana J. (2017) Imagen. Ventana Clasificación por Clases, Microstation, Bogotá.

46
En la segunda línea de código el programa le asocia da un tiempo GPS a cada una de las
pasadas de la nube de puntos para diferenciarlas por flightline o línea de vuelo, esto lo hace
mediante las trayectorias resultantes en el procesado del vuelo, y la ventana de comando es la
siguiente:
Ilustración 24. Aldana J. (2017) Imagen. Ventana Deducción de líneas de Vuelo o Trayectorias, Microstation,
Bogotá.
La tercera línea de código, el programa reconoce las flightlines por tiempo GPS y se encarga
de cortar el solape, es decir, como las líneas de vuelo estas sobrepuestas una encima de otra,
mediante una compensación de densidad de puntos el software elige la mejor flightline y la que
esta sobrepuesta la clasifica en una capa que denominamos (90 – Solape) esto para que la
información no se repita y hacer el set de datos mucho más liviano para su manipulación.

47
Ilustración 25. Aldana J. (2017) Imagen. Ventana Cortar Solape, Microstation, Bogotá.
Una vez tenemos la nube de puntos clasificada en la clase 01- Default, y las líneas de vuelo
escogidas por calidad y densidad de puntos, la cuarta línea de código de la MACRO1, se crea
una rutina que clasifica esta capa bajo la iteración descrita en la siguiente ventana.

48
Ilustración 26. Aldana J. (2017) Imagen. Ventana Clasificación de Terreno, Microstation, Bogotá.
Esta rutina comienza seleccionando los puntos más bajos locales que son el dato más
confiable en el suelo, para seleccionar estos puntos iniciales se toma en cuenta el tamaño
máximo de las edificaciones, para este caso la altura máxima estandarizada es 60 metros, se
ingresan los parámetros del ángulo del terreno, Angulo de Iteración y distancia de Iteración.
• Angulo del terreno: Es la pendiente con mayor inclinación permitida de la superficie del
suelo, se usa entre 88 a 90 grados si existen objetos o elementos hechos por el hombre en
el área del proyecto y entre 10 a 15 grados si solo hay terreno natural
• Angulo de Iteración: Angulo máximo entre un punto y su proyección en el plano de un
triángulo y el vértice del triángulo más cercano

49
• Distancia de iteración: Distancia máxima desde un punto al plano triangular.
Normalmente valores entre 0.5 y 1.5m.
Ilustración 27. Recuperada de UserGuide Terra Scan. Imagen. Metodo de Clasificacion por Angulo y
Distancia entre puntos, Bentley System Inc.
El proceso tiene dos opciones para detener la iteración de la rutina, uno de ellos es reducir la
iteración cuando el Angulo sea menor a un valor determinado, o detenerla definitivamente
cuando el Angulo sea menor que un valor asignado, estas dos opciones evitan la adición de
densidad de puntos innecesarios al modelo de tierra y reduce los requisitos de memoria utilizada
para cada proceso.
El resultado de esta clasificación se ilustra a continuación:
Ilustración 28. Aldana J. (2017) Imagen. Nube de puntos Clasificada en Ground y Default, Microstation,
Bogotá.

50
• Clasificación Automática De Las Construcciones
Una vez clasificado el Terreno en la capa GROUND, se corre una rutina de clasificación de
las estructuras que se hace a partir de esta clase como punto de referencia, como se muestra en la
ilustración de la siguiente ventana
Ilustración 29. Aldana J. (2017) Imagen. Ventana Clasificación de Estructuras, Microstation, Bogotá.
Partiendo de la Clase GROUND como la clase con los puntos de terreno, tomando los puntos
de la clase DEFAULT y clasificándolos en la clase 6-BUILDING bajo los siguientes parámetros:
Tamaño mínimo de las construcciones: Los puntos se clasifican si el área de los techos de los
edificios es mayor que el valor asignado en metros cuadrados.
Tolerancia en Z: Diferencia mínima de elevación de un punto desde el plano más bajo a través
de los puntos en un techo.
Una vez se clasifican las construcciones podemos observar el resultado de la nube de puntos
clasificada de la siguiente manera:
51
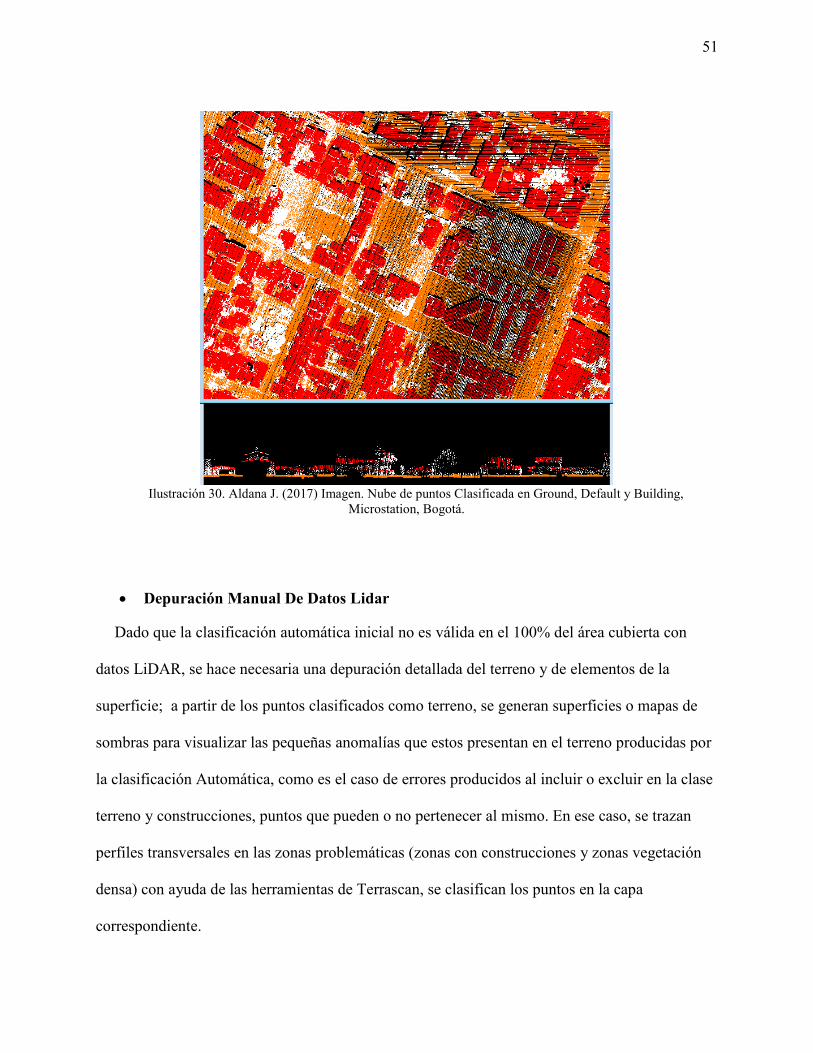
Ilustración 30. Aldana J. (2017) Imagen. Nube de puntos Clasificada en Ground, Default y Building,
Microstation, Bogotá.
• Depuración Manual De Datos Lidar
Dado que la clasificación automática inicial no es válida en el 100% del área cubierta con
datos LiDAR, se hace necesaria una depuración detallada del terreno y de elementos de la
superficie; a partir de los puntos clasificados como terreno, se generan superficies o mapas de
sombras para visualizar las pequeñas anomalías que estos presentan en el terreno producidas por
la clasificación Automática, como es el caso de errores producidos al incluir o excluir en la clase
terreno y construcciones, puntos que pueden o no pertenecer al mismo. En ese caso, se trazan
perfiles transversales en las zonas problemáticas (zonas con construcciones y zonas vegetación
densa) con ayuda de las herramientas de Terrascan, se clasifican los puntos en la capa
correspondiente.

52
• Generación de Modelos de Superficie
Para generar las modelos de superficies se realiza con métodos de triangulación mediante
el módulo de TerraModel, la ventana de parámetros es la siguiente:
Ilustración 31. Aldana J. (2017) Imagen. Ventana Exportación de Modelo Digital de Superficies,
Microstation, Bogotá.
Las clases para modelar son 2-GROUND y 6-BUILDING, se termina el espaciado de la
grilla del modelo, para este caso es de 50 cm, creando triángulos máximos de 5000
metros para que abarque puntos muy distantes, este valor es exagerado solo para que el
modelo tenga en cuenta todos los puntos del proyecto y un buffer de 20 metros que es
una expansión delimitada por un valor constante sobre el área. Dando como resultado un
modelo de triangulación de una superficie como podemos observar en la ilustración .

53
Ilustración 32. Aldana J. (2017) Imagen. Modelo Digital de Superficies, Microstation, Bogotá.
El formato de estos modelos son ASCII que consta de información de encabezamiento
que contiene un conjunto de palabras clave, seguida de los valores de las celdas en un
orden mayor de filas. Y el valor en cada una de estas filas es la altura en Z del modelo, de
esta forma mediante ArcGIS se convirtieron estos ficheros de ASCII a un Raster dataset.
Ilustración 33. Aldana J. (2017) Imagen. Herramienta de Transformación ASCII a Raster,
ArctoolBox, ArcGis, Bogotá.
54
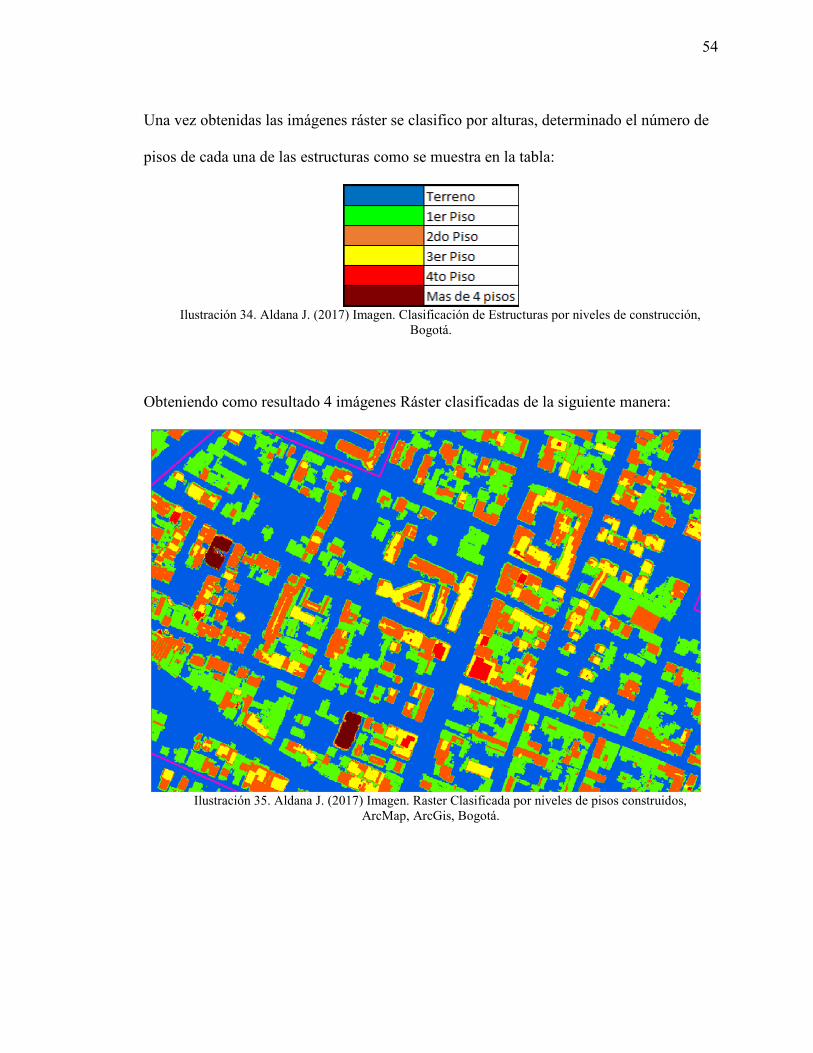
Una vez obtenidas las imágenes ráster se clasifico por alturas, determinado el número de
pisos de cada una de las estructuras como se muestra en la tabla:
Ilustración 34. Aldana J. (2017) Imagen. Clasificación de Estructuras por niveles de construcción,
Bogotá.
Obteniendo como resultado 4 imágenes Ráster clasificadas de la siguiente manera:
Ilustración 35. Aldana J. (2017) Imagen. Raster Clasificada por niveles de pisos construidos,
ArcMap, ArcGis, Bogotá.

55
• Algebra de Mapas o resta de Modelos.
La forma de encontrar las diferencias entre las imágenes ráster de diferentes épocas
sobrevoladas sobre la misma área de proyecto, es mediante la aplicación de algebra de
mapas, utilizando como operación matemática la resta de modelos de elevación entre una
imagen ráster actual menos una imagen ráster de una temporalidad anterior.
Ilustración 36. Aldana J. (2017) Imagen. Herramienta para procesos de Algebra de Mapas,
ArctoolBox, ArcGis, Bogotá.
Obteniendo como resultado una imagen ráster con las diferencias entre los dos modelos,
al clasificar estas diferencias podemos observar donde existen variación de
construcciones de 1, 2, 3 y hasta 4 pisos como podemos observar en la siguiente
ilustración.

56
Ilustración 37. Aldana J. (2017) Imagen. Predios Resultado de la Resta de Modelos por algebra de
mapas, ArcMap, ArcGis, Bogotá.
• Comprobación en Campo
Como todo buen método científico se verificaron en campo los resultados del proyecto,
utilizando las herramientas web a la disposición de todo público, Google quiso
inventariar con imágenes panorámicas en 360° horizontales y 290° verticales todas las
calles de las principales ciudades y municipios alrededor del mundo y lo llamo Google
Street View, permitiendo a los usuarios ver en línea las edificaciones, para fortuna de este
proyecto, Google realizo este levantamiento en el año 2013 y podemos comparar las
imágenes de la aplicación contra las fotografías tomadas en campo.
Para esto se escogieron los siguientes predios de los resultados obtenidos:
57
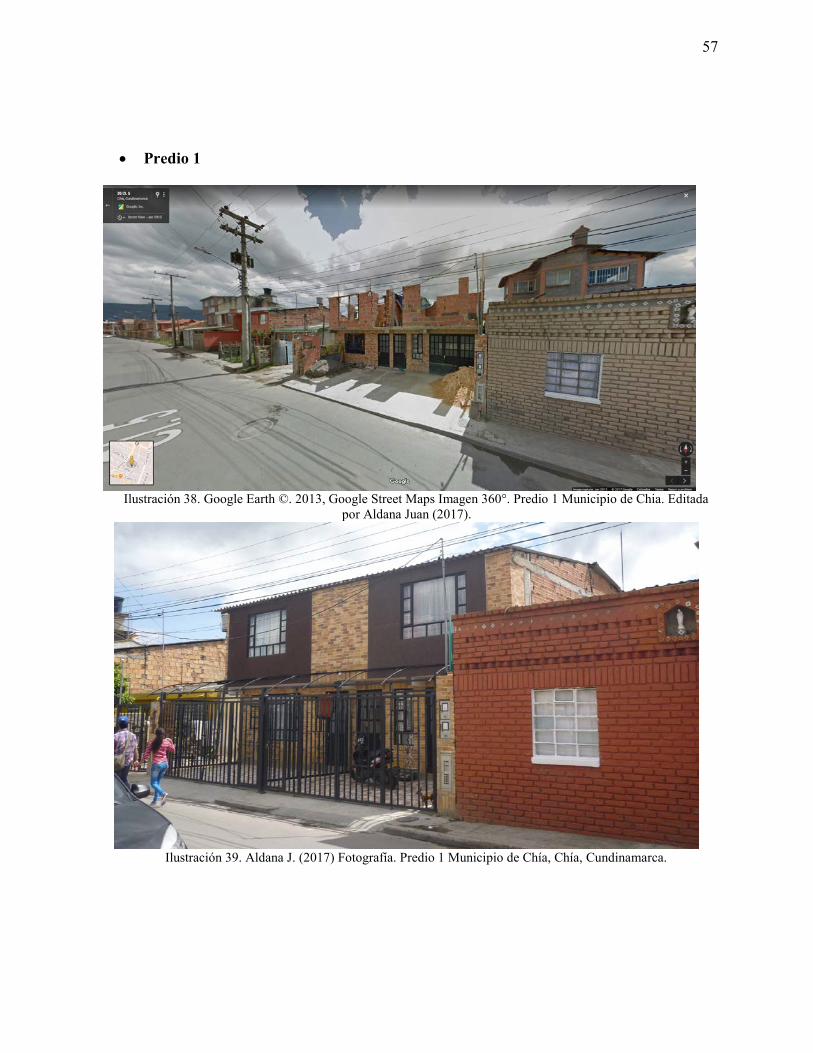
• Predio 1
Ilustración 38. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 1 Municipio de Chia. Editada
por Aldana Juan (2017).
Ilustración 39. Aldana J. (2017) Fotografía. Predio 1 Municipio de Chía, Chía, Cundinamarca.

58
• Predio 2
Ilustración 40. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 2 Municipio de Chia.
Editada por Aldana Juan (2017).
Ilustración 41. Aldana J. (2017) Fotografía. Predio 2 Municipio de Chía, Chía, Cundinamarca.
59
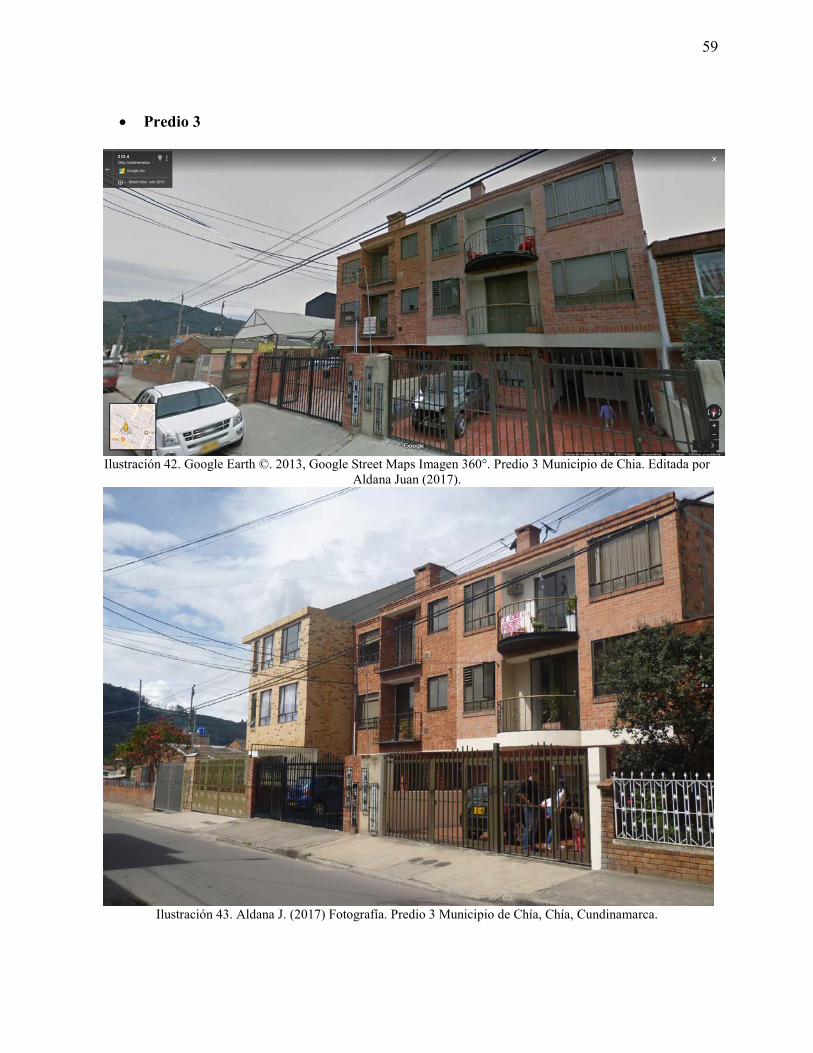
• Predio 3
Ilustración 42. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 3 Municipio de Chia. Editada por
Aldana Juan (2017).
Ilustración 43. Aldana J. (2017) Fotografía. Predio 3 Municipio de Chía, Chía, Cundinamarca.

60
• Predio 4
Ilustración 44. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 4 Municipio de Chia. Editada por
Aldana Juan (2017).
Ilustración 45. Aldana J. (2017) Fotografía. Predio 4 Municipio de Chía, Chía, Cundinamarca.

61
• Predio 5
Ilustración 46. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 5 Municipio de Chia. Editada por
Aldana Juan (2017).
Ilustración 47. Aldana J. (2017) Fotografía. Predio 5 Municipio de Chía, Chía, Cundinamarca.

62
• Predio 6
Ilustración 48. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 6 Municipio de Chia.
Editada por Aldana Juan (2017).
Ilustración 49. Aldana J. (2017) Fotografía. Predio 6 Municipio de Chía, Chía, Cundinamarca.
63
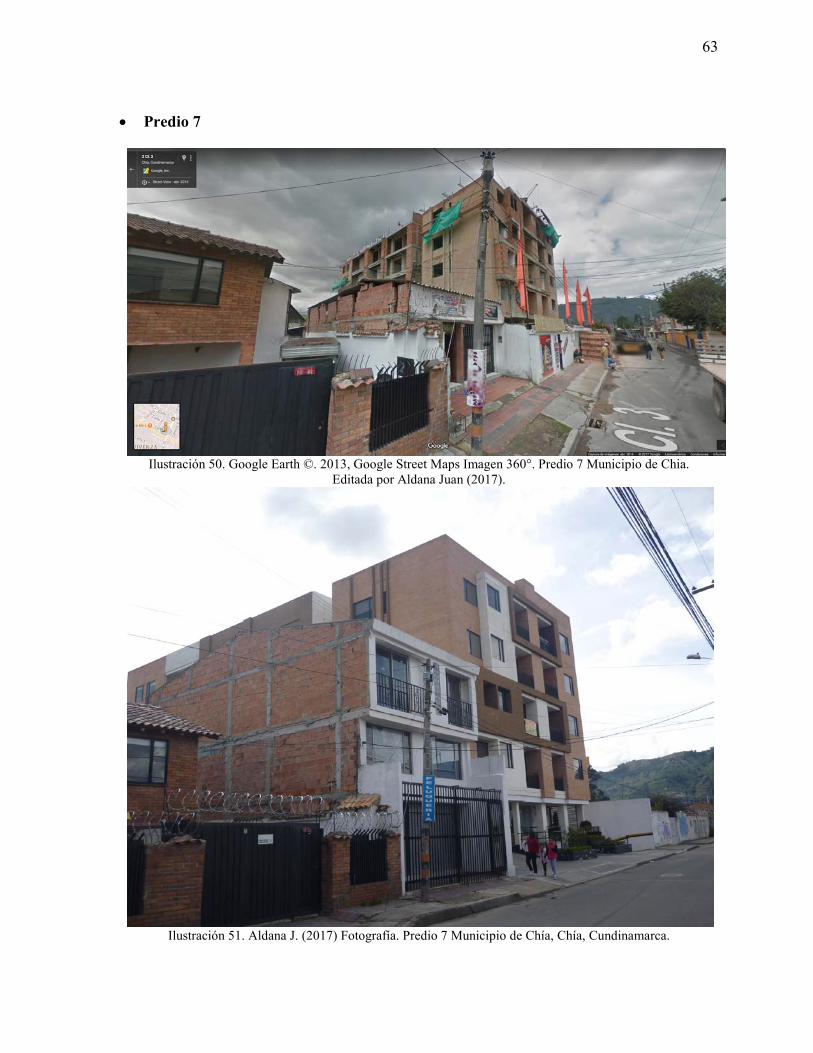
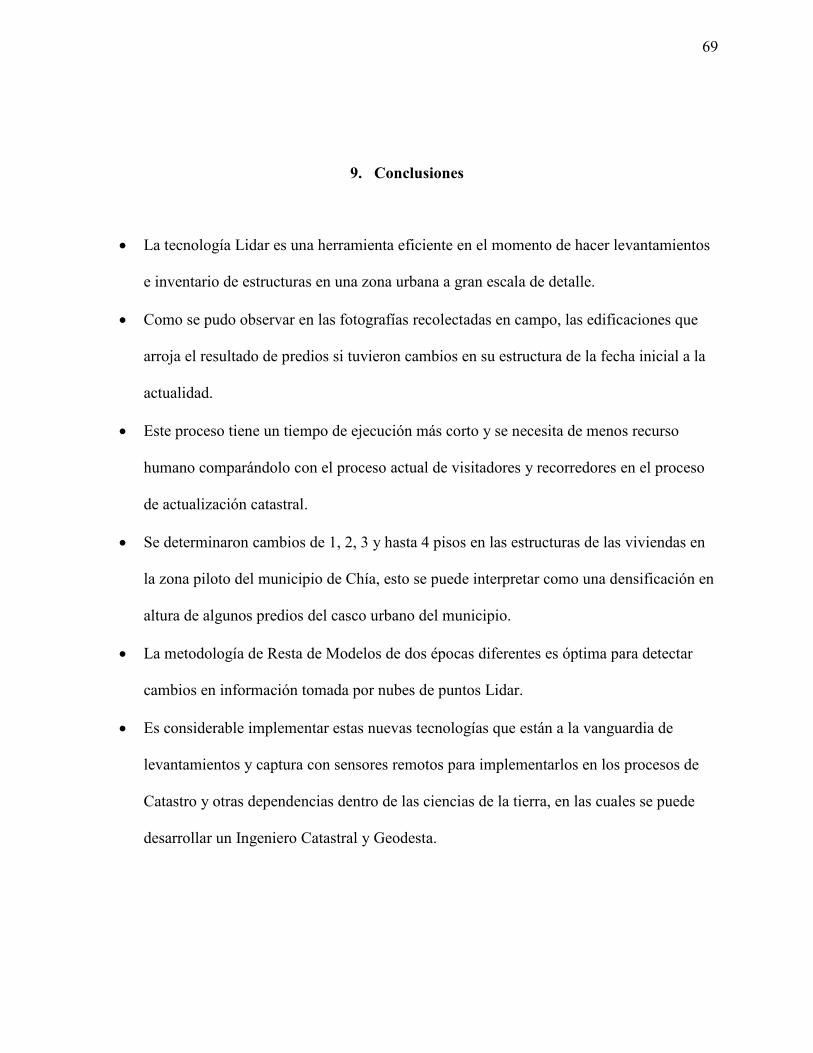
• Predio 7
Ilustración 50. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 7 Municipio de Chia.
Editada por Aldana Juan (2017).
Ilustración 51. Aldana J. (2017) Fotografía. Predio 7 Municipio de Chía, Chía, Cundinamarca.

64
• Predio 8
Ilustración 52. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 8 Municipio de Chia.
Editada por Aldana Juan (2017).
Ilustración 53. Aldana J. (2017) Fotografía. Predio 8 Municipio de Chía, Chía, Cundinamarca.

65
• Predio 9
Ilustración 54. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 9 Municipio de Chia.
Editada por Aldana Juan (2017).
Ilustración 55. Aldana J. (2017) Fotografía. Predio 9 Municipio de Chía, Chía, Cundinamarca.

66
• Predio 10
Ilustración 56. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 10 Municipio de Chia. Editada
por Aldana Juan (2017).
Ilustración 57. Aldana J. (2017) Fotografía. Predio 10 Municipio de Chía, Chía, Cundinamarca.

67
• Predio 11
Ilustración 58. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 11 Municipio de Chia. Editada
por Aldana Juan (2017).
Ilustración 59. Aldana J. (2017) Fotografía. Predio 11 Municipio de Chía, Chía, Cundinamarca.

68
• Predio 12
Ilustración 60. Google Earth ©. 2013, Google Street Maps Imagen 360°. Predio 12 Municipio de Chia. Editada
por Aldana Juan (2017).
Ilustración 61. Aldana J. (2017) Fotografía. Predio 12 Municipio de Chía, Chía, Cundinamarca.
69
9. Conclusiones
• La tecnología Lidar es una herramienta eficiente en el momento de hacer levantamientos
e inventario de estructuras en una zona urbana a gran escala de detalle.
• Como se pudo observar en las fotografías recolectadas en campo, las edificaciones que
arroja el resultado de predios si tuvieron cambios en su estructura de la fecha inicial a la
actualidad.
• Este proceso tiene un tiempo de ejecución más corto y se necesita de menos recurso
humano comparándolo con el proceso actual de visitadores y recorredores en el proceso
de actualización catastral.
• Se determinaron cambios de 1, 2, 3 y hasta 4 pisos en las estructuras de las viviendas en
la zona piloto del municipio de Chía, esto se puede interpretar como una densificación en
altura de algunos predios del casco urbano del municipio.
• La metodología de Resta de Modelos de dos épocas diferentes es óptima para detectar
cambios en información tomada por nubes de puntos Lidar.
• Es considerable implementar estas nuevas tecnologías que están a la vanguardia de
levantamientos y captura con sensores remotos para implementarlos en los procesos de
Catastro y otras dependencias dentro de las ciencias de la tierra, en las cuales se puede
desarrollar un Ingeniero Catastral y Geodesta.

70
10. Bibliografía
Alcaldia Municipal de Chia. (2013). Informe Analisis Predial Urbana 1999-2013. (O. d. -
OSIAE-2013, Ed.) Chia, Cundinamarca, Colombia: Secretaria de Planeación.
Alfonso, A. A. (Julio de 2013). Curso SIG, Teledetección, Sensoramiento Remoto, Remote
Sensing, Geomática, GIS, Percepción Remota. (U. Nacional, Editor) Recuperado el 16 de
Agosto de 2016, de http://www.unalmed.edu.co/~janaya/clase9/clase9.htm
Chaabouni-Chouayakh, H., D'Angelo, P., Reinartz, P., & Krauss, T. (2010). 3D Change
detection inside urban areas using different digital surface models. The International
Archives of Photogrammetry and Remote Sensing, 3B(38), 86-91.
Congreso de la Republica de Colombia. (06 de Julio de 1983). Ley 14 de 1983. Por la cual se
fortalecen los fiscos de las entidades territoriales y se dictan otras disposiciones. Bogotá,
Colombia.
Gimeno Gutierrez, M., Martinez Cebrian, L., & Lopez Mingueza, E. (2015). Detección
automatizada de incidencias catastrales mediante datos LiDAR. (u. A. (FADOT), Ed.) 10.
Instituto Geografico Agustin Codazzi. (04 de Febrero de 2011). Resolucion 070 de 2011. Por la
cual se reglamenta técnicamente la formación catastral, la actualización de la formación
catastral y la conservación catastral. Bogotá, Colombia.
Instituto Geografico Agustin Codazzi. (17 de Octubre de 2012). Resolucion 1008 de 2012. Por
la cual se establece la metodología para desarrollar la actualización permanente de la
formación catastral. Bogotá, Colombia.
Instituto Geografico Agustin Codazzi. (31 de Octubre de 2012). Resolución 1055 de 2012. Por
la cual se modifica la Resolucion 70 de Febrero 04 del 2011. Bogotá, Colombia.

71
Jordán Francés, V. (2015). Aplicación de datos LiDAR del sistema aéreo en la actualización
catastral urbana. Universidad Politecnica de Valencia, Ciencias Ambientales. Valencia:
Escuela Politecnica Superior de Gandia, Universidad Politecnica de Valencia.
Jung, F. (2004). Detecting building changes from multitemporal aerial stereopairs. ISPRS
Journal Photogrammetric Engineering & Remote Sensing, 58(10), 187-201.
Knudsen, T., & Olsen, B. (2003). Automated change detection for updates of digital map
database. Photogrammetric Engineering & Remote Sensing, 69(11), 1289-1296.
Martinez Tobon, C. D., Aunta Duarte, J. E., & Valero Fandiño, J. A. (14 de Mayo de 2013).
Aplicacion de datos LiDAR en la estimación del volumen forestal en el parque
metropolitano Bosque San Carlos. Aplicacion de datos LiDAR en la estimación del
volumen forestal en el parque metropolitano Bosque San Carlos, 23-1. (U. M.-C.
Neogranadina, Ed.) Bogotá, Colombia.
Rehor, M., Baehr, H.-P., Tasha-Kurdi, F., Landes, T., & Grussenmeyer, P. (2008). Contribution
of two plane detection algorithms to recognition of intact and damaged buildings in
LIDAR data. The Photogrammetric Record, 23(124), 441-456.
Rosales León, J. J., & Rodrigo Bello, J. J. (17 de Febrero de 2013). Tierra y tecnologia.
Recuperado el 16 de Enero de 2016, de Tecnologia LIDAR aplicada a a la gestion del
territorio: http://www.icog.es/TyT/index.php/2013/02/tecnologia-lidar-aplicada-a-la-
gestion-del-territorio/
Rottensteiner, F., & Briese, C. (2003). Automatic generation of building models from lidar data
and the integration of aerial images. The international archives of Photogrammetry,
Remote Sensing and Spatial Information Sciences, 7B(38), 475-480.
72
Sanchez Lopera, J. L. (2012). Actualización de cartografia catastral urbana mediante LiDAR y
SIG. Revista Internacional de Ciencia y Tecnologia de la Información Cartográfica, 70.
Tomlin, D. (s.f.). Geographic Information Systems and Cartographic Modelling (1989 ed.).
Prentice-Hall.
Trinder, J., & Salah, M. (2011). Disaster change detection using airborne LiDAR. Proccedings of
the Surveying & Spatiall Sciences Biennial Conference, 231-242.
Vögtle, T., & Steinle, E. (2004). Detection and recognition of changes in building geometry
derived from multitemporal laserscanning data. The International Archives of
Photogrammetry, Remote Sensing andd Spatial Information Sciences, B2(35), 428-433.







![Procesamiento LIDAR ArcGIS10[1]](https://cdn.vdocumento.com/doc/165x107/557201ef4979599169a2a6e7/procesamiento-lidar-arcgis101.jpg)