Download - Diseño de Controlador PID
Universidad Nacional Autónoma de
México
Facultad de Ingeniería
Actividad 02. Diseño de Controlador PID
Sistemas de Control
Realice el procedimiento que se le proporciona y observe cuidadosamente el simulador, preste mucha atención a la función del controlador y sus raíces (polos y ceros) en el plano complejo para reconocer los efectos de las acciones de control sobre un proceso de primero y segundo orden.
Complete la tabla que se le muestra después, de acuerdo con sus mediciones y observaciones en los incisos correspondientes.
1
Procedimiento:
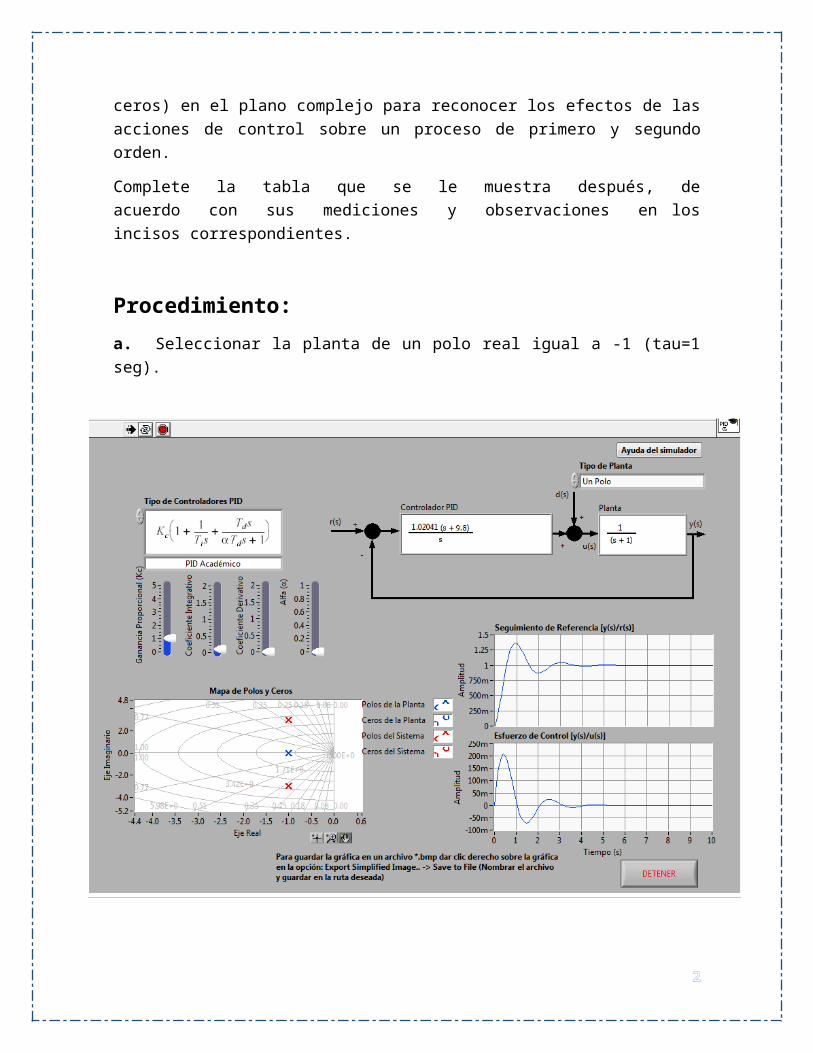
a. Seleccionar la planta de un polo real igual a -1 (tau=1 seg).
b. Ajustar la ganancia Kc=2 y el resto de los parámetros del controlador son inhabilitados (coeficiente integral cero, coeficiente derivativo cero y alfa cero).
2

c. Ejecutar la simulación y medir el offset (error de estado estable), en la gráfica de la salida y contra el tiempo, así como la diferencia del valor estable de la salida con respecto a 1 (1000m).
d. Observar el mapa de polos y ceros, y anotar las coordenadas de los polos azul y rojo.
3

Polo azul: (-1, 0 i) Polo rojo: (-3, 0 i)
e. Seleccionar el tipo de planta de dos polos reales: -0.5 y -2 (tau1= 2 y tau2= 0.5 seg)
f. Ajustar la ganancia Kc=1.5 y el resto de los parámetros del controlados son inhabilitados (coeficiente integral cero, coeficiente derivativo cero y alfa cero).
4
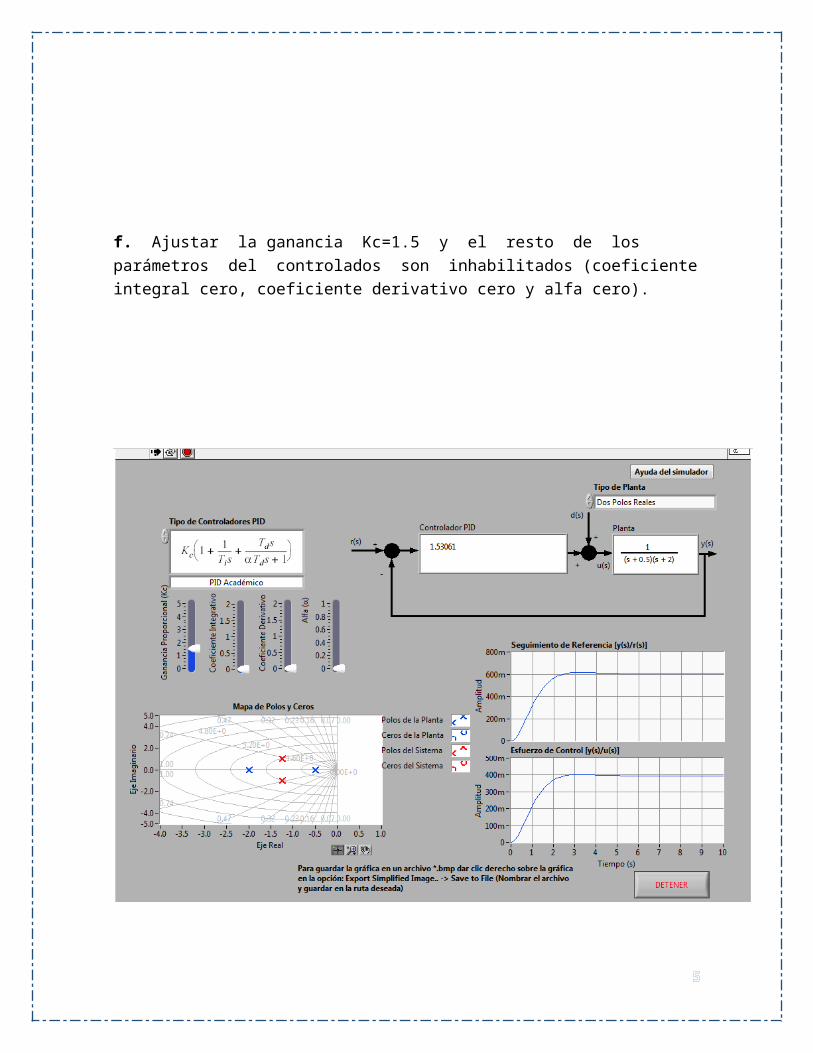
g. Correr la simulación y medir el offset (error de estado estable), en la gráfica de la salida ycontra el tiempo, como la diferencia del valor estable de la salida con respecto a 1 (1000m).
5

h. Observar el mapa de polos y ceros, y anotar las coordenadas de los polos azules y rojos. Los de color rojo son los polos en lazo cerrado y modifican su valor conforme Kc varía.
Polo Rojo 1: (-1.75 ,1.5 i ) Polo Rojo 2 : (-1.75 , 1.5 i ) Polo Azul 1: (-0.5, 0 i ) Polo Azul 2 : (-2, 0 i )
i. Seleccionar el tipo de planta de un polo -3 (tau1=0.333 seg) y un integrador (polo en el origen)
j. Ajustar la ganancia Kc=2.25 y el resto de los parámetros del controlador son inhabilitados (coeficiente integral cero, coeficiente derivativo cero y alfa cero).
6

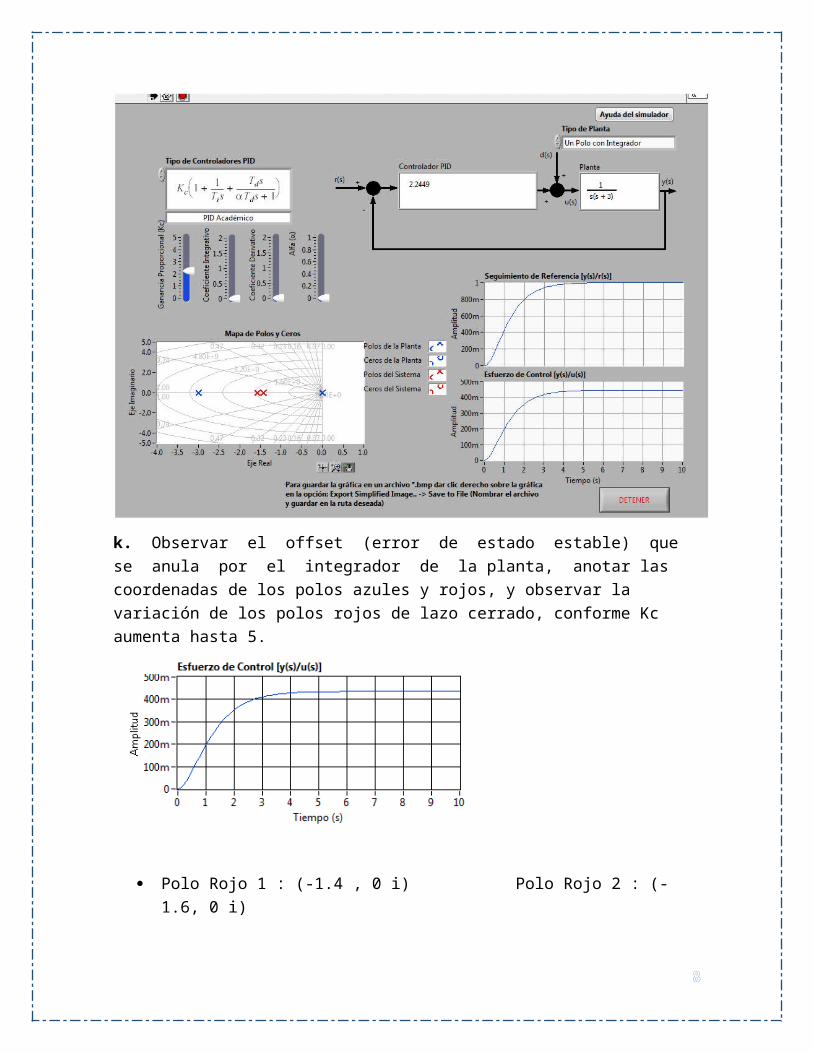
k. Observar el offset (error de estado estable) que se anula por el integrador de la planta, anotar las coordenadas de los polos azules y rojos, y observar la variación de los polos rojos de lazo cerrado, conforme Kc aumenta hasta 5.
Polo Rojo 1 : (-1.4 , 0 i) Polo Rojo 2 : (-1.6, 0 i) Polo Azul 1: ( 0, 0 i) Polo Azul 2 : (-3, 0 i)
Variación del polo rojo de lazo cerrado en Kc = 5.
Polo Rojo 1: (-1.5 , 1.9 i ) Polo Rojo 2 : (-1.5, 1.9 i)
7
Polo Azul 1: ( 0, 0 i) Polo Azul 2 : (-3, 0 i)
l. Seleccionar el tipo de planta de dos polos reales: -0.5 y -2 (tau1=2 y tau2= 0.5 seg).
m. Cambiar a control PI: Kc= 1 y Ti= 2 seg (el resto de los parámetros del control permanecen inhabilitados). En este caso el integrador es parte del controlador, el cual además incluye un cero.
8

n. Observar el offset (error de estado estable) que se anula por el integrador del controlador, anotar las coordenadas de todas las raíces (polos y ceros, azules y rojos), y observar la variación de los polos rojos de lazo cerrado, conforme Kc aumenta hasta 3.
Polo Rojo 1 : (-1 , 0.1 i) Polo Rojo 2 : (-1, -0.1 i) Polo Azul 1: ( -0.5, 0 i) Polo Azul 2 : (-2, 0 i) Cero Rojo: (-0.5 , 0 i)
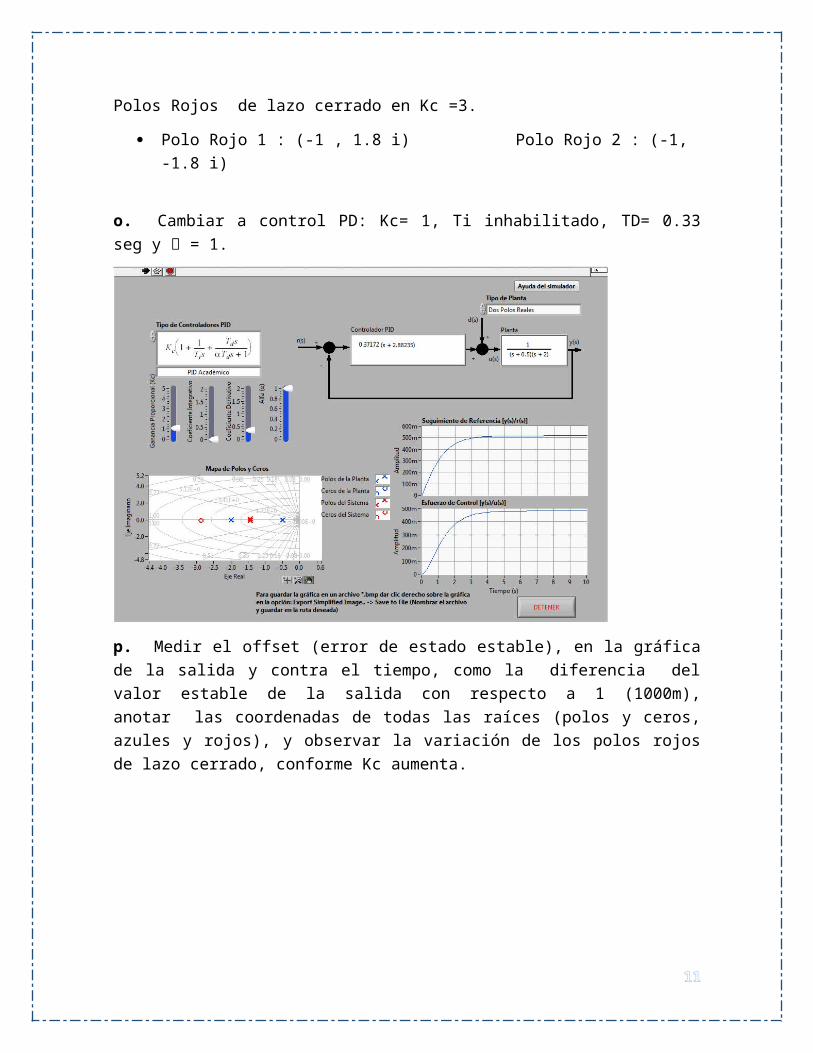
Polos Rojos de lazo cerrado en Kc =3.
Polo Rojo 1 : (-1 , 1.8 i) Polo Rojo 2 : (-1, -1.8 i)
o. Cambiar a control PD: Kc= 1, Ti inhabilitado, TD= 0.33 seg y = 1.
9

p. Medir el offset (error de estado estable), en la gráfica de la salida y contra el tiempo, como la diferencia del valor estable de la salida con respecto a 1 (1000m), anotar las coordenadas de todas las raíces (polos y ceros, azules y rojos), y observar la variación de los polos rojos de lazo cerrado, conforme Kc aumenta.
Polo Rojo 1 : (-1.5 , 0 i) Polo Rojo 2 : (-1.5, 0 i) Polo Azul 1: ( -0.5, 0 i) Polo Azul 2 : (-2, 0 i) Cero Rojo: (-2.8 , 0 i)
Incisos ess
Polosazules
Polos rojos(malla cerrada)
Ceros Observaciones
c y d (-3, 0 i) (-1, 0 i) -
10
g y h (-0.5, 0 i ), (-2, 0i ) (-1.75 ,1.5 i),(-1.75 , 1.5i ) -k ( 0, 0 i) , (-3, 0 i) (-1.4 , 0 i) , (-1.6, 0 i) -n ( -0.5, 0 i) , (-2, 0
i)(-1 , 0.1 i), (-1, -0.1 i) (-0.5 , 0 i)
p ( -0.5, 0 i), (-2, 0 i) (-1.5 , 0 i) , (-1.5, 0 i) (-2.8 , 0 i)
11







