Download - Charla básica 1

María Graciela Alarcón Ledesma

First Lego League
• ¿Qué es?
• ¿Qué valores fomenta?
• ¿Qué es lo que realmente esperamos lograr participando?
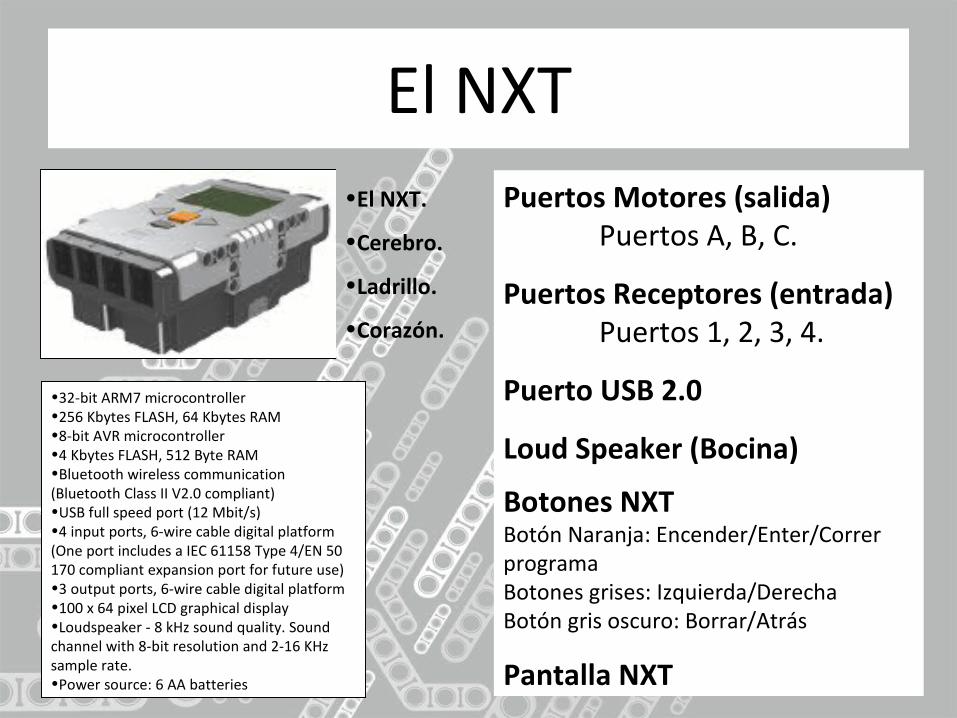
El NXT•El NXT.
•Cerebro.
•Ladrillo.
•Corazón.
Puertos Motores (salida)Puertos A, B, C.
Puertos Receptores (entrada)Puertos 1, 2, 3, 4.
Puerto USB 2.0
Loud Speaker (Bocina)
Botones NXTBotón Naranja: Encender/Enter/Correr programaBotones grises: Izquierda/DerechaBotón gris oscuro: Borrar/Atrás
Pantalla NXT
•32-bit ARM7 microcontroller •256 Kbytes FLASH, 64 Kbytes RAM •8-bit AVR microcontroller •4 Kbytes FLASH, 512 Byte RAM •Bluetooth wireless communication (Bluetooth Class II V2.0 compliant) •USB full speed port (12 Mbit/s) •4 input ports, 6-wire cable digital platform (One port includes a IEC 61158 Type 4/EN 50 170 compliant expansion port for future use) •3 output ports, 6-wire cable digital platform •100 x 64 pixel LCD graphical display •Loudspeaker - 8 kHz sound quality. Sound channel with 8-bit resolution and 2-16 KHz sample rate. •Power source: 6 AA batteries

Puertos Motores (salida)
Puertos Receptores (entrada)
Puerto USB 2.0
Loud Speaker (Bocina)
Pantalla NXT
Botón Naranja: Encender/Enter/Correr programa
Botón gris oscuro: Borrar/Atrás
Botones grises: Izquierda/Derecha
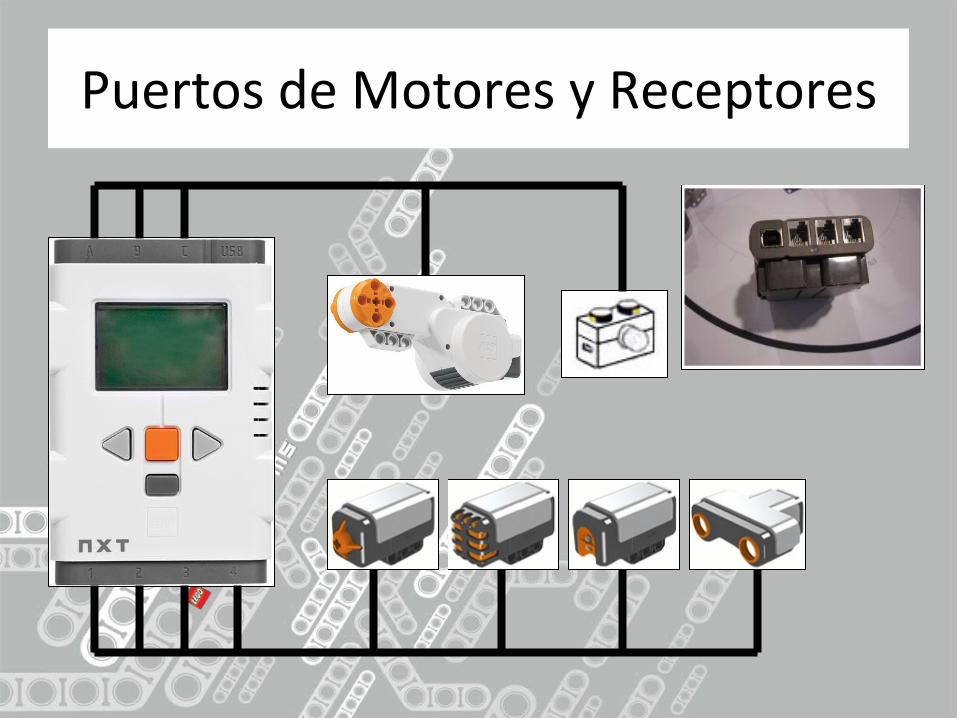
Puertos de Motores y Receptores

Conceptos de Armado


Programación
• Es darle una serie de instrucciones lógicas a un procesador que las ejecutará tal y cual se las dieron.
• En mecatrónica (robótica) debemos tener en cuenta las limitaciones, tanto mecánicas como lógicas, de nuestros robots.

+
M(A,B)↑
M(A,B)■
M(B)↑
_
010010101110100101110100011101001010101101010101101010011011101001011011101001101011011101010110101001011101001010110100110101110001011001010111
Lógica de Programación
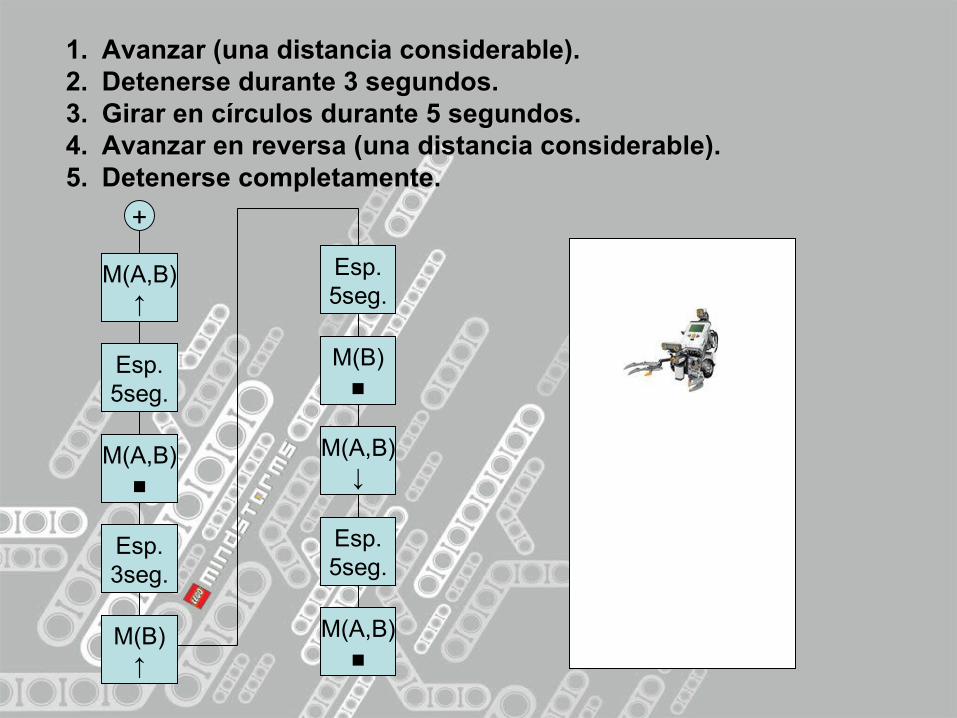
1.1. Avanzar (una distancia considerable).Avanzar (una distancia considerable).2.2. Detenerse durante 3 segundos.Detenerse durante 3 segundos.3.3. Girar en círculos durante 5 segundos.Girar en círculos durante 5 segundos.4.4. Avanzar en reversa (una distancia considerable).Avanzar en reversa (una distancia considerable).5.5. Detenerse completamente.Detenerse completamente.
+
M(A,B)↑
Esp.5seg.
M(A,B)■
Esp.3seg.
M(B)↑
Esp.5seg.
M(B)■
M(A,B)↓
Esp.5seg.
M(A,B)■

Introducción al NXT-G
NXT-Graphical program.Paleta común:Contiene los bloques de
programación más comúnmente usados
Paleta completa:Contiene toda la variedad de
bloques de programación
Custom palette:
Contiene los bloques descargados y los que hace uno mismo.
Panel de configuración:
Aquí es donde se configuran los bloques de programación con sus diferentes opciones
El Controlador:
El controlador te permite descargar un programa (o parte de él) desde tu computador a tu NXT. Además te permite cambiar las configuraciones de tu NXT.

Ir hacia delante
Ir hacia atrás
Controlar la potencia usada
Sensor de rotación incluido
Motores

Puertos que serán controlados.Muestra la dirección del robot.Muestra el nivel de potencia usado.Muestra la duración del bloque de programación.Hubs de datos del bloque de programación.
1. Selecciona los motores a usar. Si se seleccionan 2 motores, éstos irán sincronizados.
2. Selecciona si ir hacia delante, atrás o detenerse.
3. (Sólo si hay 2 motores seleccionados) Selecciona la dirección que tomarán conjuntamente.
4. Selecciona la potencia inyectada a los motores (de 0% a 100%).
5. Selecciona la duración del movimiento. Puede ser en segundos, grados, vueltas o ilimitada.
6. Selecciona la siguiente acción a realizar. Si detenerse completamente o mantener la inercia.
7. Muestra la rotación hecha por los motores, en grados. (El NXT debe estar conectado al PC).

Nuestro primer programa
Requerimientos:• Cree un nuevo programa llamado “hola mundo”.
• Al ser ejecutado el robot debe hacer lo que sigue:– Avanzar 5 segundos.
– Detenerse durante 3 segundos.
– Girar en círculos durante 5 segundos (sobre su eje, no alrededor de una rueda).
– Avanzar en reversa 5 segundos.
– Detenerse completamente.
Hint: Use el botón Esperar Tiempo

Nuestro segundo programa
Requerimientos:• Cree un nuevo programa llamado “Vuelvo”
(sin cerrar el programa anterior).• Al ser ejecutado el robot debe:
– Avanzar exactamente 1[m].– Girar exactamente 90º.– Volver al punto de origen.
Hint: Las ruedas dicen su diámetro en [mm].Use la función View de su NXT.

Sensores
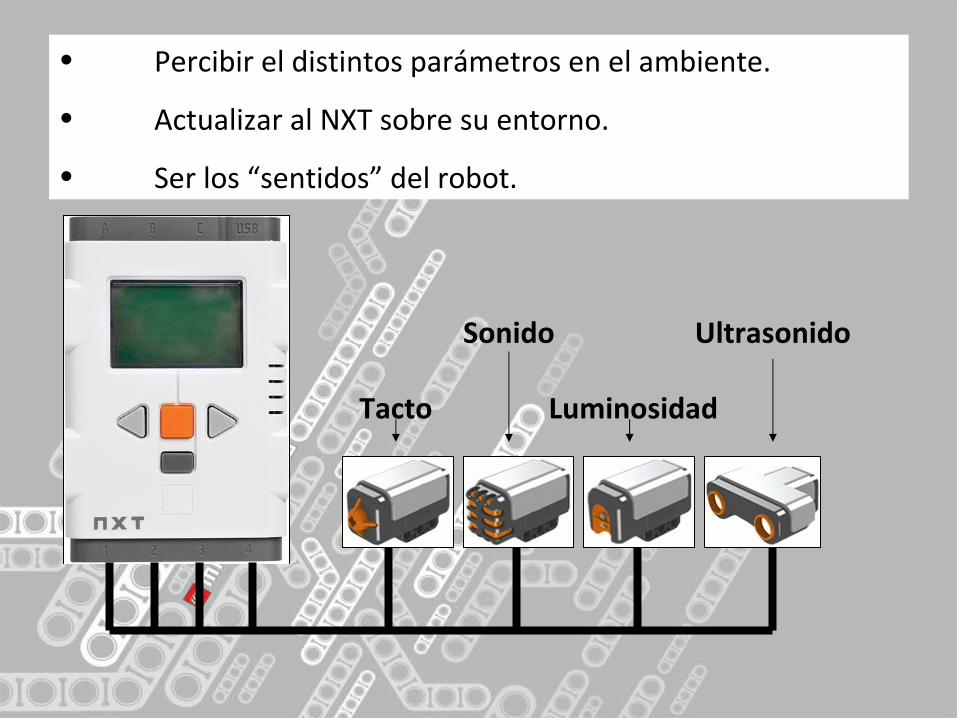
• Percibir el distintos parámetros en el ambiente.
• Actualizar al NXT sobre su entorno.
• Ser los “sentidos” del robot.
Tacto
Sonido
Luminosidad
Ultrasonido
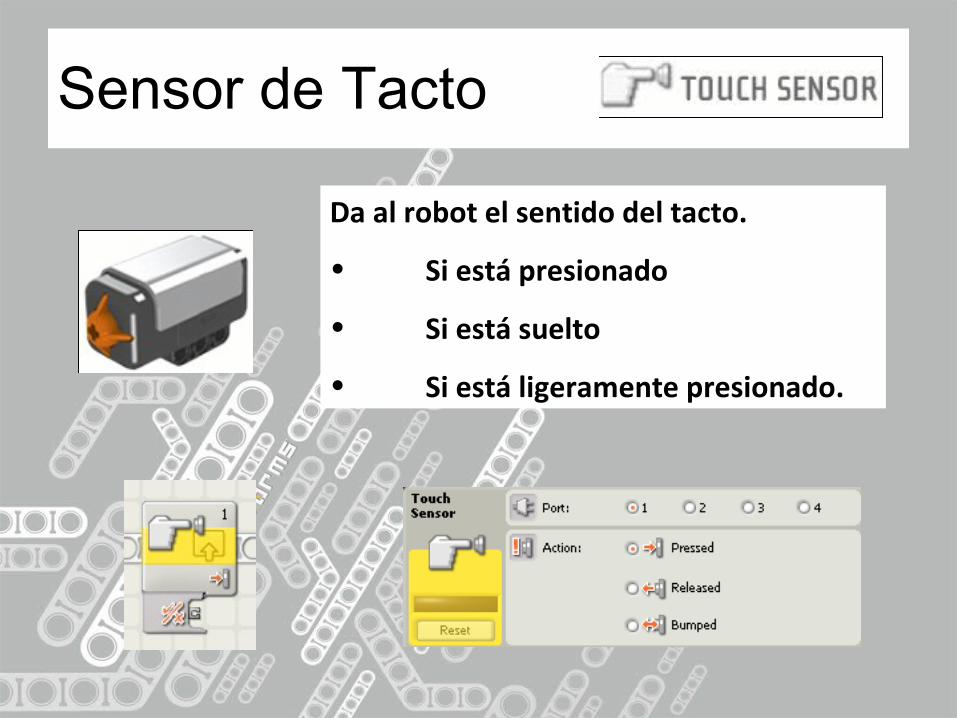
Da al robot el sentido del tacto.
• Si está presionado
• Si está suelto
• Si está ligeramente presionado.
Sensor de Tacto
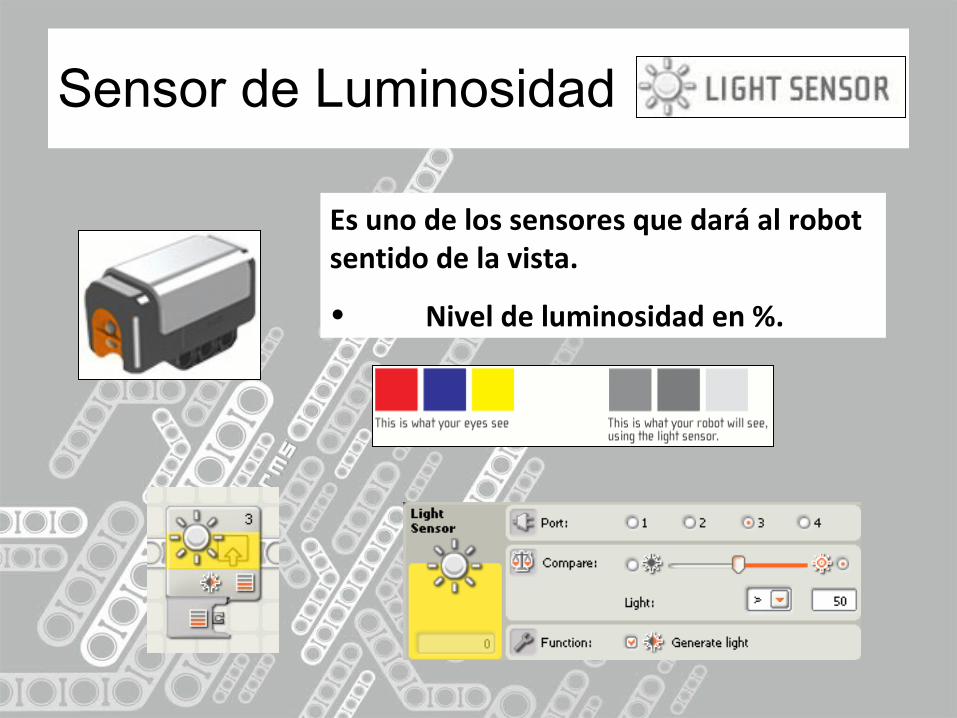
Es uno de los sensores que dará al robot sentido de la vista.
• Nivel de luminosidad en %.
Sensor de Luminosidad

Da al robot el sentido del oído.
• Nivel de dB (todo sonido).
• Nivel de dBA (oído humano).
• Datos en %.
•0-5% Habitación silenciosa.
•5-10% Alguien hablando lejos.
•10-30% Conversación normal, música moderada,
•30-100% Gente gritando, música a alto volumen.
Sensor de Sonido

Es el otro de los sensores que dará vista al robot.
• Distancia en cm. o pulg.
• Distancias desde 0 a 255 cm.
• Precisión de +/- 3 cm.
Sensor de Ultrasonido

Nuestro tercer programa
Requerimientos:• Cree un nuevo programa llamado “Baile”.• Al ser ejecutado los robots deben:
– Esperar al sonido de una aplauso– Al aplaudir una vez los robots deben al mismo tiempo emitir una
fanfarria mientras comienzan a seguir una secuencia de baile al unísono.
– Finalizado el baile deben todos exclamar al mismo tiempo “yes” y luego aplaudir (en tiempos diferentes).
Hint: No solo se puede esperar por tiempo.“Wait for completion” desactivada no retrasa la secuencia
del programa.
Recuento de hoy…
Aprendimos los valores de la First Lego League y cual es nuestro rol como entrenadores.
Introdujimos el ladrillo NXT. Armamos nuestro primer robot, el TriBot. Aprendimos a darle un enfoque diferente a nuestras ideas con el fin
de que el robot las entienda. Introdujimos el NXT-G y su paleta común. Aprendimos sobre el funcionamiento de los motores y las
limitaciones y potenciales de éstos. Aprendimos como predecir como se comportará un motor con una
rueda tanto de forma teórica, como experimental. Introdujimos los Sensores básicos del NXT y su uso a grandes
rasgos. Logramos crear un grupo de bailarines geniales.
En resumen… la pasamos bien




![charla 3-Rinitis[1]](https://cdn.vdocumento.com/doc/165x107/577c7fa01a28abe054a562cb/charla-3-rinitis1.jpg)


![Charla Cusco Junio[1]](https://cdn.vdocumento.com/doc/165x107/577c7c3e1a28abe05499e412/charla-cusco-junio1.jpg)