Download - 01 Curso Funadamentos de Control

Fundamentos de Control Fundamentos de Control
e e
InstrumentaciónInstrumentación

Tres Elementos de ControlTres Elementos de Control
Se deben realizar tres tareas a fin de implementar un Control de Procesos:
•MedirMedir la variable de procesos.
•CompararComparar PV con el SP para determinar el Error.-
•AjustarAjustar la Variable manipulada para minimizar el Error
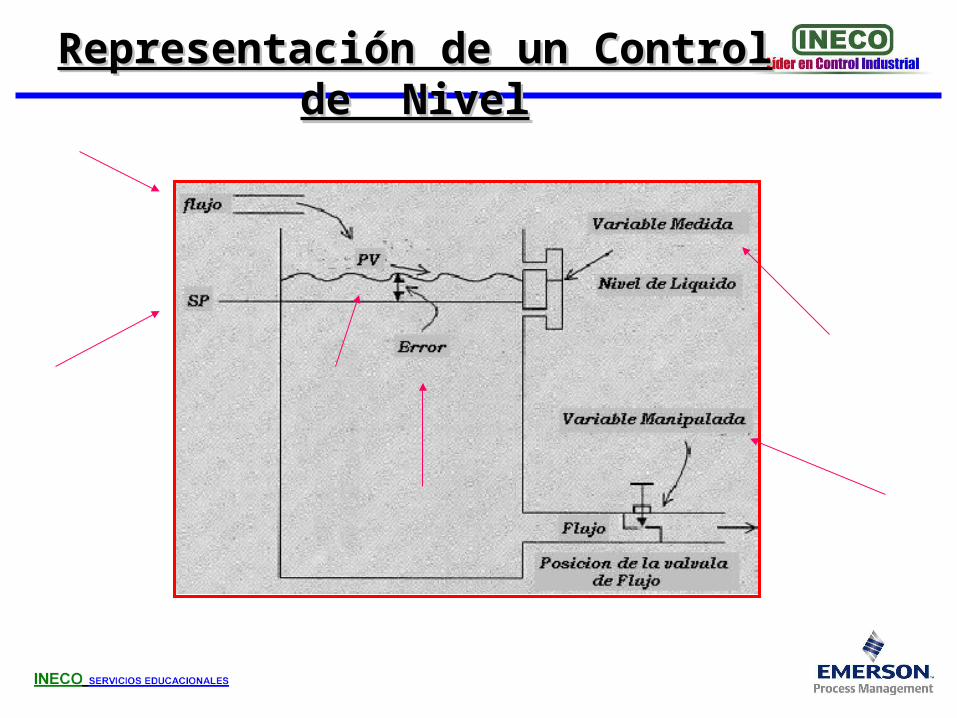
Representación de un Control de NivelRepresentación de un Control de Nivel
Acción de ControlAcción de Control
Básicamente existen 2 formas de abordar un Control:
• Control ManualControl Manual con Retroalimentación.- con Retroalimentación.-
• Control AutomáticoControl Automático con con Retroalimentación.-Retroalimentación.-
Control Manual con RetroalimentaciónControl Manual con Retroalimentación
En un sistema de control manual, un Operador realiza las tres funciones esenciales:
Medición:Medición: Observa un calibrador, medidor, tubo de indicador del valor de la Variable de proceso PV.-
Comparación PV con SP:Comparación PV con SP:El operador determina visualmente si existe un Error.-
Ajuste:Ajuste: Ajusta la Variable manipulada operando manualmente
una Válvula

Flujo
SP
Tubo Indicador
Válvula Manual
Flujo
Control Manual con RetroalimentaciónControl Manual con Retroalimentación
Control Automático con RetroalimentaciónControl Automático con Retroalimentación
En un sistema de control automático, la instrumentación de procesos se utiliza para realizar las tres tareas fundamentales:
• Elemento Sensitivo Primario.-Elemento Sensitivo Primario.-
• Transmisor.-Transmisor.-
• Controlador.-Controlador.-
• Elemento Final de Control.-Elemento Final de Control.-

Control Automático con RetroalimentaciónControl Automático con Retroalimentación
Elemento Sensitivo Primario:Elemento Sensitivo Primario: Dispositivo sensor que esta In-situ con el proceso.-
Transmisor:Transmisor:Recibe la señal de E.S.P., la modula en una señal normalizada y la transmite al Controlador.-
Controlador:Controlador:Automáticamente compara el valor PV con el SP para determinar el Error (e), actuando sobre el E.F.C. de acuerdo al desarrollo del Algoritmo de Control existente en el.
E:F.C.:E:F.C.:Dispositivo que actúa conforme le ordena el controlador, actuando sobre la Variable Manipulada del proceso.

Flujo
SP PV(Nivel)
Sensor/Transmisor Sensor/Transmisor de Nivel de Nivel
ControladorControlador
E.F.C: (Válvula)E.F.C: (Válvula)
Flujo
Control Automático con RetroalimentaciónControl Automático con Retroalimentación
Elementos Sensitivos PrimariosElementos Sensitivos Primarios
• TemperaturaTemperatura:: Termocuplas, RTD´s, Termistores, Etc...
• Flujo:Flujo: Placas Orificio, Annubar, Pitot, Electrodos, Etc..
• Nivel:Nivel: Celdas Capacitivas, Conductivas, Flotadores, Ultrasónica, Etc..
• Presión:Presión: Bourdones, Celdas Strain Gauge, Etc...
TransmisoresTransmisores
Transmisores Analógicos.-Transmisores Analógicos.-
Transmisores Digitales.-Transmisores Digitales.-

ControladoresControladores
• Controladores Stand-Alone Unilazo Controladores Stand-Alone Unilazo
• Controladores Stand-Alone MultilazoControladores Stand-Alone Multilazo
• Controladores DigitalesControladores Digitales
• Controladores AvanzadosControladores Avanzados
Elementos Final de ControlElementos Final de Control
• Válvulas Discretas.
• Válvulas Moduladas.
• Elementos Calefactores.

Lazo de ControlLazo de Control

Función de un Lazo de control
• Tratar de que la Variable Controlada (PV) se Tratar de que la Variable Controlada (PV) se mantenga lo mas próxima posible al Valor Deseado mantenga lo mas próxima posible al Valor Deseado (SP), con una evolución temporal que respete las (SP), con una evolución temporal que respete las exigencias del Proceso.exigencias del Proceso.

Algoritmo de Control
• Las variables de un Proceso se relacionan una a una, tomando una de ellas como Entrada al Controlador o variable Medida, y la otra como Salida del Controlador o Variable Manipulada.
• La relación entre ambas esta dada por un Algoritmo de Control, cuya implementacion es la función principal del Controlador.

Algoritmo de Control P.I.D.
Este algoritmo surge como consecuencia de la combinación de las 3 acciones básicas de control:
• Acción Proporcional.-
• Acción Integral.-
• Acción Derivativa.-

Controladores Avanzados
• Self-Tunning.-
• Adaptive.-
• Fuzzy Logic.-
• La Autosintonia es la capacidad de un Controlador de determinar por si mismo los parámetros PID adecuados para el control de un determinado proceso.
• El control Adaptivo consiste en la implementacion de parámetros PID variables en función de las condiciones dinámicas del proceso.
• Lógica difusa es una técnica de inteligencia artificial, definida como la “lógica del razonamiento Aproximado”

Sistemas de Control basados en PC
• Los sistemas de control de procesos han avanzado producto del desarrollo de la micro electrónica y el continuo crecimiento de las prestaciones que ofrecen los Software de Monitoreo y Control así como también los Protocolos de Comunicaciones.
Algunos sistemas de control son:
• Sistemas de Control Distribuidos (DCS)Sistemas de Control Distribuidos (DCS)
• Sistemas Centralizados basados en PLC´sSistemas Centralizados basados en PLC´s
• Sistemas SCADASistemas SCADA

Evolución Evolución
de los de los
Sistemas de ControlSistemas de Control
Etapa inicial del Control AutomáticoEtapa inicial del Control Automático
• Controladores de tipo mecánicoControladores de tipo mecánico.
• Cada Controlador era independiente.Cada Controlador era independiente.
• CConcepto de Control Local.oncepto de Control Local.

Introducción de Controladores NeumáticosNeumáticos.
El Controlador se aleja paulatinamente de los elementos Sensor/ Actuadores y pasa a formar parte de un Panel de Control
Se tiende a “Centralizar” los Controladores en un Panel.

Introducción de la Tecnología Digital y de Microprocesadores
Aparición de Controladores Digitales de ProcesoAparición de Controladores Digitales de Proceso
Se continua la tendencia a “Centralizar” los Controladores en un Panel

Introducción de la Tecnología Digital y de Microprocesadores
Surge la idea de controlar procesos a través de ComputadorasSurge la idea de controlar procesos a través de Computadoras
Concepto de Controlador Centralizado en una ComputadoraConcepto de Controlador Centralizado en una Computadora

Introducción de la Tecnología Digital y de Microprocesadores
Aparecen los Controladores de Lógica Programables
Control Centralizado en el PLC.

Introducción de la Tecnología Digital y de Microprocesadores
Aparecen los Sistemas de Control Distribuido (DCS´s) para control regulatorio
Control Centralizado en los Controladores, pero distribuido por la Planta.

Tecnología Digital y Microprocesadores-Integración de sistemasTecnología Digital y Microprocesadores-Integración de sistemas
Información integrada entre distintos sistemasInformación integrada entre distintos sistemas

Sistemas de Control Automático Bus de Campo FieldbusSistemas de Control Automático Bus de Campo Fieldbus
Control verdaderamente distribuido y localControl verdaderamente distribuido y local

DeltaV DeltaV
Sistemas de Control Automático Bus de Campo FieldbusSistemas de Control Automático Bus de Campo Fieldbus

Terminología en Instrumentación.

Terminología en Instrumentación :Terminología en Instrumentación :
• Al completar este módulo, usted deberá :
– Describir la terminología básica usada en Instrumentación.
– Comprender la terminología básica usada en la especificación de instrumentos transmisores.

Terminología de Rangos :• Valor Inferior de Rango ( Lower Range Value, LRV).• Valor Superior de Rango (Upper Range Value, URV).• Rango del Transmisor (Transmitter Range).• Límite Inferior del Sensor (Lower Sensor Limit, LSL).• Límite Superior del Sensor (Upper Sensor Limit, USL).• Punto bajo de Calibración (Lower Trim Point).• Punto Alto de Calibración (Upper Trim Point).• Rangedown.
Ejemplo :
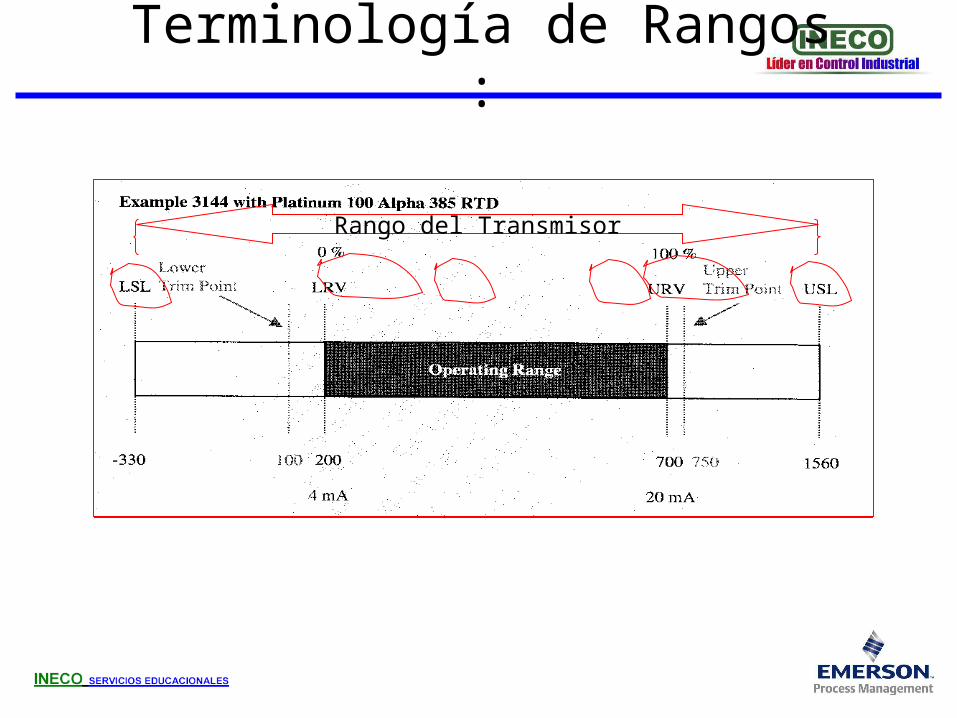
Terminología de Rangos :
Rango del Transmisor

Especificaciones Funcionales :
• Temperatura de Proceso (Process Temperatura).• Temperatura Ambiente (Ambient Temperature).• Presión de Operación (Operating Pressure).• Presión Estática de Línea (Static Line Pressure).• Límites de Sobre Presión (Overpressure Limits).• Presión de Ruptura (Burst Pressure). • Humedad Ambiental (Enviroment).• Zonas Peligrosas (Hazardous Locations).
– Class I, Division I.– Class I, Division II.– Class II Locations.– Class III Locations.– Group A, B, C, D, E, F y G.
Especificaciones Funcionales :• Encapsulado a prueba de Explosión (Explosión-Proof Enclosure).• Equipo Intrínsecamente Seguro (Intrinsically Safe Equipment). • Ejemplo de Aprobaciones de Transmisores Rosemount : Están
aprobados para su uso bajo para las siguientes áreas clasificadas :– Opción E5 : Equipo a prueba de explosión (Explosión-Proof
Enclosure), para Clase I, Div. I, Grupos B, C y D. A prueba de ignición para Clase II, Div. I, grupos E, F y G; Apropiado para Clase III, Div. I, zona peligrosa.
– Opción I5 : Equipo Intrínsecamente Seguro (Intrinsically Safe Equipment), para Clase I, Div. I, Grupos A, B, C y D; Clase II, Div. I, grupos E, F y G; Clase III, Div. I. Y cuando se conecta según esquema Rosemount 03031-1019 códigos de temperatura T3 y T4, No incendiario para Clese I, Div. 2, Grupos A, B, C y D. Sellado en Fábrica.
– Opción K5 : Combinación de opciones E5 y I5.Siempre hay que tener como referencia el manual del instrumento para sus
diagramas y aprobaciones.

Damping (amortiguación) :

Procesamiento de señal digital/Filtros :
• Filtro DSP :
• Filtro 50/60Hz :
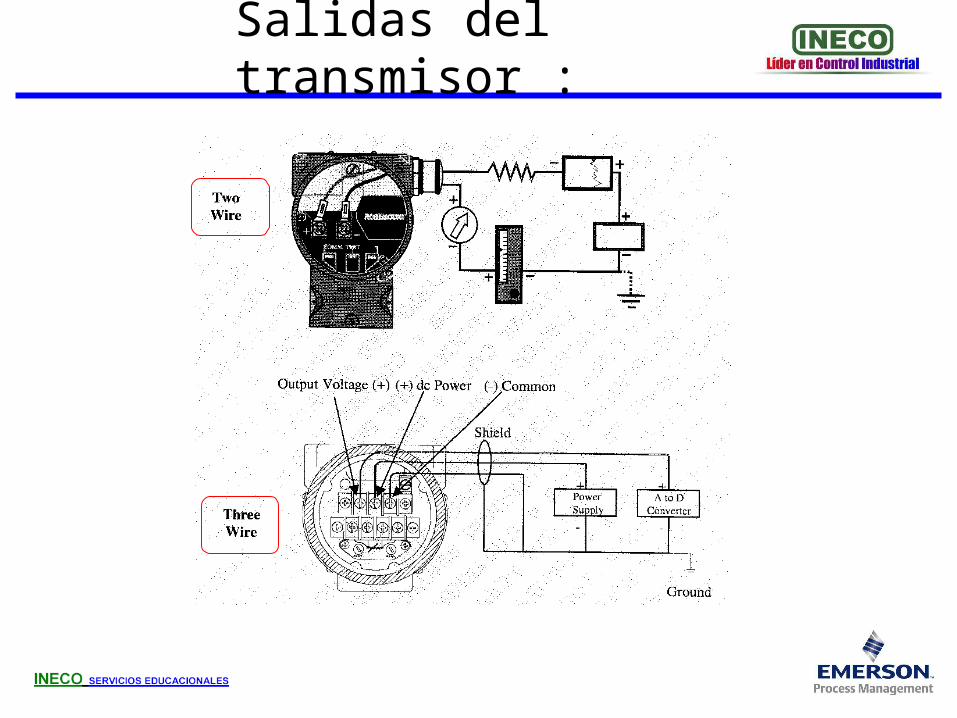
Salidas del transmisor :

16,8
Fuente de poder y Límite de Carga :

Materiales de Construcción :

Supresión o Elevación de Cero :
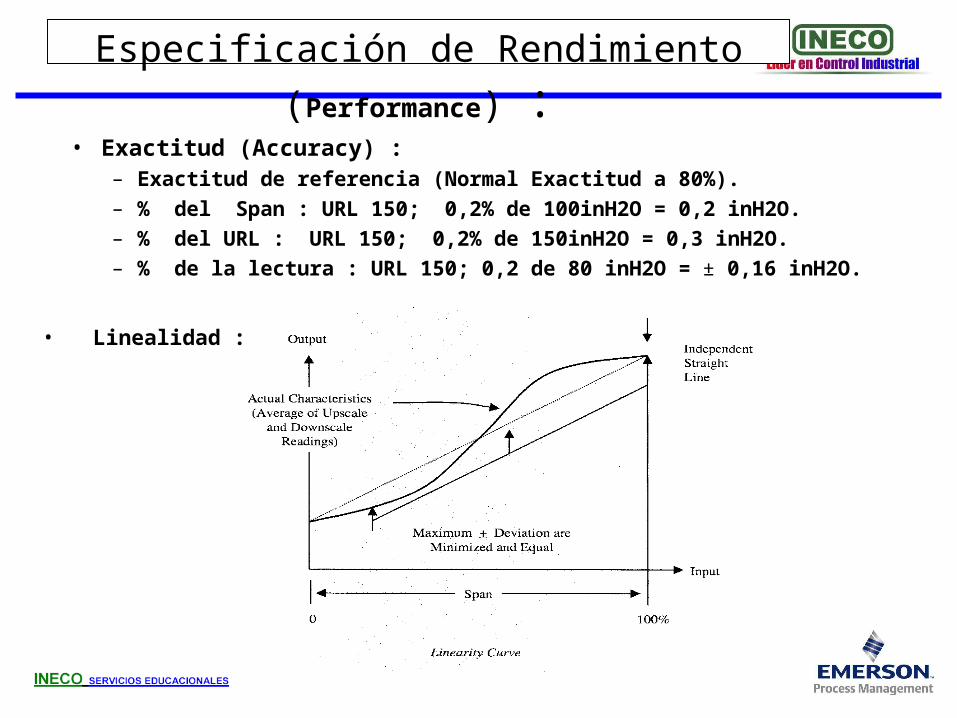
Especificación de Rendimiento (Performance) :
• Exactitud (Accuracy) :– Exactitud de referencia (Normal Exactitud a 80%).
– % del Span : URL 150; 0,2% de 100inH2O = 0,2 inH2O.
– % del URL : URL 150; 0,2% de 150inH2O = 0,3 inH2O.
– % de la lectura : URL 150; 0,2 de 80 inH2O = ± 0,16 inH2O.
• Linealidad :

Especificación de Rendimiento (Performance) :
• Histéresis :

Especificación de Rendimiento (Performance) :
• Histéresis :
• Efecto temperatura :– 0,50% de Rango por 100 grados F.
– 0,05% de Rango por 100 grados F.
– 0,01 grados F por grados F entre -15 y 185 grados F.
Especificación de Rendimiento (Performance) :
• Reproducibilidad : Especificación de rendimiento basada en el tiempo.
±
±
±
• Efecto de Sobrepresión :– 0,25% del límite superior del rango para 200 psi.
– 1,0% del Span calibrado para 500 psi.
±±
• Efecto de Presión Estática :– Presión de línea aplicada a ambos lados de un transmisor. Implica
errores de Span y Cero.
• Efecto Vibración :
Especificación de Rendimiento (Performance) :
• Efecto de la Alimentación de Energía :
• Efecto de Carga :

Visión general para la selección de Instrumentación.
Visión general para la Visión general para la selección de instrumentaciónselección de instrumentación : :
• Al completar este módulo, usted deberá :– Discutir los Items a considerar cuando selecciona un
instrumento.
– Comprender cómo leer leer especificaciones de instrumentos.
– Comprender los errores de desempeño indicados en las especificaciones de Rendimientos.
Aspectos a Considerar :
• Importancia del punto de medida en el proceso.• Exactitud requerida.• Tipo de Salida.• Tipo de Medición.• Fiabilidad.• Reproducibilidad.• Redundancia.• Cominicaciones.• Condiciones de Operación.• Costos.

Aspectos a Considerar :
• Importancia del Punto de medida (o del lazo de control) :
Aspectos a Considerar :
• Tipo de Salida :– 4-20 mA.– 10-50 mA.– 1-5 Volt.– HART o FF .
• Comunicaciones :– HART (4-20 mA).– MODBUS.– Fielbus.– Profibus.– HTG (Rosemount propietario).

Aspectos a Considerar :
• Tipo de Medición :– Presión : AP, GP o DP. Accesorios como: manifold, placas orificio y
tuberías.– Temperatura : RTD con termoposos, calibrados en conjunto. Rengo
de temperatura de trabajo. Largos de sensores y termoposos.– Flujo : Por DP, Vortex, Flujometros Magbéticos,..,etc.
Condiciones de Operación :
• Condiciones de Operación del Proceso :– Rangos de las variables.
– Tomas a proceso.
– Aspectos normativos.
• Condiciones Ambientales :– Rangos de las variables ambientales .
– Tipo de atmósfera.
– Area clasificada.
– Aspectos normativos.

Condiciones de Operación :

Costo de Instalación :
• Costo del Instrumento :– Costo de Manifold.– Tuberías.– Válvulas de Bloqueo.– Elementos primarios (flujo).
• Costo del Cableado :– Canalización y Cañerías
eléctricas.– Cajas de empalme.
• Puntos en DCS, PLC u otro Host:– Configuración.– Puntos de Entradas (AIB).
• Fuentes de Poder u otros elementos dentro del Loop.
• Costo del Montaje (tomas a proceso):– Corte de tuberías.– Soldaduras de Flanges o boquillas.
• Otros.

Costo de la Puesta en Marcha:
• Calibración del Instrumento.
• Configuración del Instrumento.
• Ensamblado del instrumento :– RTD, Termoposos.– Elementos primarios para flujo.– Manifold, válvulas de
bloqueo/cierre.– Flanges, soportes.
• Puntos de Calibración :– Patrones de Presión/Temperatura.– Corrección de cero del sensor,
luego del montaje.– Corrección de salida del
transmisor.
• Chequeo de Lazos.

Mantenimiento Reparación:
• Facilidad de calibración (cuanto tiempo toma, grado de dificultad).
• Intervalos de Calibración (tiempos entre calibraciones ).
• Costo del equipo de Calibración.
• Tiempo improductivo (paralización) de la planta para realizar la calibración.
• Tiempo para la limpieza de tomas a proceso (remoción de condensado, purgas de aire).
Frecuencia de Calibración :
• Procedimientos para determinar la frecuencia de
Calibración :
– Determinar el rendimiento requerido para su aplicación.
– Determinar las condiciones operacionales.
– Calcular el Error Total Probable (TPE).
– Calcular la estabilidad por mes.
– Calcular la frecuencia de Calibración.

Frecuencia de Calibración :
• Ejemplo de Cálculo :
– Paso 1 : Determinar el rendimiento requerido para su aplicación :
0,50% del Rango.
– Paso 2 : Determinar las condiciones operacionales.
• Transmisor :Modelo 3051CD serie 2 (URL = 250 inH2O)
• Span Calibrado : 50 grados F.
• Presión de Línea : 500 psi.
– Paso 3 : Calcular el Error Total Probable (TPE).• TPE = (Exactitud de Ref.)2+(Efecto de T.)2+Efecto PE)2 = 0,150% del Span.
• Con : Exactitud de Ref.= +-0,075% Span.
• Efecto de Tta. Ambiente = +-(0,0125xURL / Span+0,06125) por 50gF= +-0,0833 de Span.
• Efecto PE = 0,2% del Rango para 1000psi = +-0,1% del Span al máximo Span.
±

Frecuencia de Calibración :• Ejemplo de Cálculo :
– Paso 4 : Calcular la estabilidad por mes.• Estabilidad = +-(0,25% x URL / Span ) % del Span por 5 años = +-0,007% del Span por Mes.
– Paso 5 : Calcular la frecuencia de Calibración. • Frecuencia de Calibración= (Rendimiento requerido - TPE ) / Estabilidad por Mes.
• Frecuencia de Calibración= (0,5% - 0,150%) / 0,007% = 50 Meses.

Cumplimiento de Especificaciones:¿Cómo puede saber si éste cumple con las especificaciones establecidas, o en
algunos casos NO las cumple ? :

Que Especificaciones son más Importantes :
• ¿ Cuanto varia la temperatura de proceso y la ambiental ?.
• ¿ Cuan alta presión soporta el instrumento ?.
• ¿ Cuanto varia la presión de línea ?.
• ¿ Puede la alimentación de corriente variar de manera
importante, y de ser así, afectará la salida del instrumento ?.
• ¿ Se puede ubicar el instrumento en un lugar donde esté
expuesto a muchas vibraciones ?.
• ¿ El ruido le causará problemas ?.
Lectura de Especificaciones :
• Ejemplo : Un transmisor con una exactitud de 0,2%, que tiene
un URL de 150 inH2O. Estará calibrado de 0-100 in H2O, y su
lectura es de 80 in H2O. Según las siguientes especificaciones
de exactitud :
– 0,2 de Span Calibrado, entonces la lectura será 80+- 0,2 inH2O (0,2% de
100 = 0,2).
– 0,2% de URL, entonces la lectura será 80+- 0,3 inH2O (0,2% de 150
inH2O = 0,3 inH2O).
– 0,2% de Lectura, entonces la lectura será 80+- 0,16 inH2O (0,2% de 80
inH2O = 0,16 inH2O).
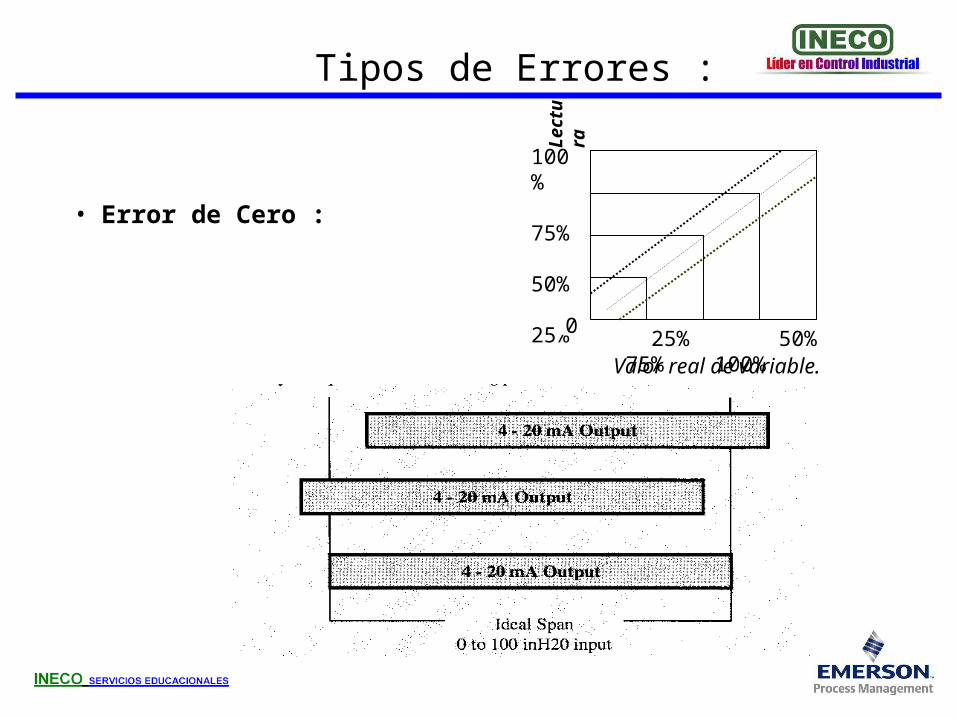
Tipos de Errores :
• Error de Cero :
25% 50% 75% 100%
100 %
75%
50%
25%0
Lectur
a
Valor real de variable.

Tipos de Errores :
• Error de Span :
Lectura
25% 50% 75% 100%
100 $
75%
50%
25%0
Valor real de variable.

Tipos de Errores :
• Error Sistemático : Exactitud de repetibilidad.
• Error de Turndown : Span superior al máximo.
• Error de Sistema : Suma de los errores de todos los
componentes del Lazo (RTD, TTy DCS).

Exactitud y Calibración :
• Precisión : Concordancia entre lecturas.

Sensibilidad y Rangeabilidad :
Fuentes de Errores :
• Presión Estática.
• Temperatura.
• Otras Fuentes de Error : Vibraciones, Variaciones
en la Alimentación, RFI.

Rendimiento Total :
1,67 % 1,56 %

Desempeño del Modelo 3051 Beneficios para el Usuario
• Capacidad de Medición Mejorada otorga mas altos retornos de capital Ejemplo: Aplicación de Flujo de Vapor:
Analógico
InteligentePremium
Exactitud de ref. Temp. Ambiente Presión estática Estabilidad
3051







