diseÑo e implementaciÓn de sistema de control de …
TRANSCRIPT

DISEÑO E IMPLEMENTACIÓN DESISTEMA DE CONTROL DE NIVELPARA TANQUES ACOPLADOS DE
ALMACENAMIENTO DE HIPOCLORITO
Jennifer Carolina Deantonio Lamprea
Universidad LibreIngeniería Mecánica
30 de Mayo del 2019

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
ResumenAnálisis del problema
En la planta de fabricación de productos de aseo, lostanques almacenan hipoclorito para la posteriordistribución; el hipoclorito almacenado puedesobrepasar el nivel del tanque y producir pérdidaseconómicas para la planta y riesgo para la salud delpersonal debido a que es necesaria la supervisiónconstante de un operario que realice la apertura o cierrede válvulas de los diferentes tanques.En este trabajo, se implementó el sistema de adquisiciónde datos, conexión de actuadores y sensores, ademásdel diseño del algoritmo de control secuencialimplementado en un controlador lógico programable(PLC), para realizar la supervisión y control del nivel delos tanques de almacenamiento de hipoclorito.
2

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
ObjetivosObjetivo General
OBJETIVO GENERAL
Diseñar e implementar un sistema de control de nivel entanques acoplados de almacenamiento de hipoclorito.
3

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
ObjetivosObjetivos Específicos
OBJETIVOS ESPECÍFICOS
Obtener el modelo matemático del sistema de formaanalítica o usar técnicas de identificación de sistemastomando datos a través de un sensor de presióndiferencial.Simular la dinámica del sistema de llenado y vaciado.Diseñar la ley de control utilizando un control ON-OFFcon histéresis.Implementar el sistema de control de nivel con el sensorde presión diferencial y visualización del nivel en unapantalla HMI (Human Machines Interface).
4

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Descripción de la planta
5

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Instrumento de mediciónSensor de Presión
Se instaló el sensor de nivel VEGA 82. La presión delnivel del fluido sobre el sensor provoca una deflexión dela membrana cerámica, y genera como resultado de lapresión externa una variación de la capacidad y de lapresión del fluido localizado dentro de la celda demedición.
6

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Instalación del instrumento de medición
7

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Controlador
El PLC OMROM CP1L − EM30DTD posee 18 entradasdigitales y 12 salidas digitales, también cuenta con dossalidas análogas de voltaje. En el PLC se añade unmódulo de extensión analógica CP1W − AD041, quepermite la lectura de la señal emitida de corrientebrindada por el sensor de presión.
8

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Controlador
9

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Interfaz Human-MachinePANTALLA HMI (Human Machine Interface)
Se instala un HMI human machine interface, donde eloperario puede visualizar el nivel de los tanques yrealizar la apertura y cierre de las válvulasproporcionales. El HMI instalado es unNB7W − TW01B de marca OMRON de conexiónEthernet de pantalla de 7′′ y alimentación 24v .
10

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Tablero de control
11

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Válvula de control
Se instala una válvula ON-OFF de bola ref. GF 233 deaccionamiento neumático, acompañado de unaelectroválvula que permite la comunicación entre el plc yla válvula.
12

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Válvula de control
13

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Descripción de la plantaDiagrama de bloques del sistema
14

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Modelado del sistema
Acumulacion = Entra − Sale
El volumen almacenado mantiene su área constante porlo que la altura es la variable que cambiaría en el tiempo.
Acumulacion = A ∗ dhdt
= qentrada − qsalida
15

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Caracterización del sistemaUmbrales de histéresis
Los umbrales de disparo para controlar el nivel en lostanques fueron definidos entre 1.5 mts y 3.5 mts.
16

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Caracterización del sistemaCaso: Alimentación y salidas abiertas
El área de sección transversal de los tanques y los flujosde entrada son iguales; además, los flujos de salidaQs1, Qs2 se asumen constantes debido a que estos soncontrolados por motobombas.
Ecuación de altura en los tanques
h1 =
(Qe1
ATk− Qs1
ATk
)t + ci1 =
(0,0255 − Qs1
7,5068
)t + ci1
h2 =
(Qe2
ATk− Qs2
ATk
)t + ci2 =
(0,0255 − Qs2
7,5068
)t + ci2
17

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Caracterización del sistemaCaso: Alimentación y salidas abiertas
18

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Caracterización del sistemaCaso: Alimentación y salidas abiertas
Calculo del error en el llenado en tanque 1 y el tanque 2.
errortk1 =1N
N∑i=1
∣∣∣∣h1 − hreal
h1
∣∣∣∣ ∗ 100 = 0.46%
errortk2 =1N
N∑i=1
∣∣∣∣h2 − hreal
h2
∣∣∣∣ ∗ 100 = 0.865%
19

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Desarrollo del algoritmoDiagrama de transición de estados
20

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Desarrollo del algoritmoEstructura general del programa
21

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Desarrollo del algoritmoConfiguración de las entradas del módulo analógico
CONFIGURACIÓN: Configura la lectura de señales através del módulo analógico.
22
Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
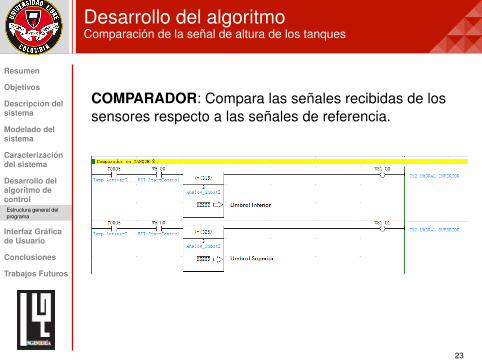
Desarrollo del algoritmoComparación de la señal de altura de los tanques
COMPARADOR: Compara las señales recibidas de lossensores respecto a las señales de referencia.
23

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Desarrollo del algoritmoControl Automático
CONTROL: Establece las condiciones para la apertura ocierre de válvulas.
24

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Desarrollo del algoritmoSalidas a Válvulas
25

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Interfaz Gráfica de Usuario
26

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Interfaz Gráfica de UsuarioPantalla de configuración de cada tanque
27

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Conclusiones
El desperdicio promedio de hipoclorito en el año 2018para el proceso de producción fue de un 12%,comparado con un desperdicio promedio del presenteaño de 4% como se muestra en el anexo 1. A partir deestos datos, se puede evidenciar que se logró disminuirlos desperdicios de hipoclorito generados por erroreshumanos en un 8%.Gracias al sistema de supervisión implementadomediante la pantalla HMI, no es necesario eldesplazamiento del operario al área de trabajo pararevisar el nivel de los tanques; sino que ahora es posiblesupervisar y controlar en un cuarto de control el estadodel sistema de forma centralizada.
28

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Conclusiones
El sistema de control implementado mantiene el nivel dehipoclorito en los umbrales establecidos, lo que permitiómejorar la disponibilidad de hipoclorito para losprocesos subsiguientes en un 5% , pues antes serealizaban paradas no programadas hasta restablecerlos niveles mínimos de trabajo en los tanques.El modelo matemático tuvo un porcentaje de error de0.43% para el tanque 1 y 0.86% para el tanque 2respecto a los datos reales, lo que permitió diseñar elalgoritmo de control y verificar el desempeño delsistema mediante simulación evitando el uso derecursos innecesarios en la planta real.
29

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Trabajos Futuros
En este momento para el control del caudal de entradaa los tanques se tienen instaladas valvulas ON-OFF; siestas se cambian por válvulas proporcionales es posibleimplementar sistemas de control como [Control PID] queprodrían mejorar el desempeño del sistema.Para el control del caudal de salida se proponeimplementar una válvula proporcional que permitaregular o cerrar la salida en el momento donde el caudalde entrada es menor que el de salida, otra posiblesolución puede ser la instalación de un caudal dealimentación adicional.
30

Resumen
Objetivos
Descripción delsistema
Modelado delsistema
Caracterizacióndel sistema
Desarrollo delalgoritmo decontrolEstructura general delprograma
Interfaz Gráficade Usuario
Conclusiones
Trabajos Futuros
Trabajos Futuros
La fabricación del tablero de control se realizó teniendoen cuenta el futuro control en tanques adicionales, sesugiere realizar la instalación de la instrumentación enlos tanques de mezclado, logrando a futuro obtener unsistema scada que permita la supervisión y control delárea de tanques de la planta real.
31
