diseño y construcción de un variador de velocidad...
TRANSCRIPT
1
Diseño y construcción de un variador de velocidad aplicado a un motor asíncrono con
arranque suave, para formación académica.
Jonatan Duque Lozano1., Mauricio Roldán Castro2., Henry Felipe Ibáñez Olaya3.
Resumen:
En este artículo se pretende ilustrar el diseño e implementación de un variador de
velocidad aplicado a un motor asíncrono con el fin de que el mismo presente cierta
flexibilidad a la hora de operarse, permitiendo hacer prácticas de laboratorio para ampliar
más el conocimiento en esta área del control a maquinas eléctricas, variadores de
velocidad y arranque suave de motores.
Para la ejecución de lo descrito anteriormente, los diseños parten del sustento teórico y
simulaciones que son validadas en condiciones reales evidenciando sus funciones así
como aplicaciones.
Palabras claves: Motor asíncrono, variador de velocidad, arranque suave.
Abstract:
This article is intended to illustrate the design and implementation of a variable speed
drive applied to an asynchronous motor , so that the same present some flexibility when
operated , allowing to laboratory practice to further expand knowledge in this area control
of electrical machines , variable speed drives and soft start engines.
For the execution of the above, the designs are based on the theoretical basis and
simulations are validated in real conditions evidencing their functions and applications.
Keywords: Asynchronous motors, variable speed, soft start.
INTRODUCCIÓN.
En busca de implementar sistemas eléctricos que fortalezcan la formación técnica-
profesional a los estudiantes para la comprensión de conceptos teóricos y prácticos en el
área de máquinas eléctricas. Surge la idea de construir un variador de velocidad para un
motor asíncrono, basado en los principios de control electrónico para así poder brindar la
1 Estudiante Ingeniería Eléctrica, Universidad Distrital Francisco José de Caldas. [email protected] 2 Estudiante Ingeniería Eléctrica, Universidad Distrital Francisco José de Caldas.
[email protected] 3 Docente Ingeniería Eléctrica, Universidad Distrital Francisco José de Caldas. [email protected]
2
facilidad de poderse controlar por estudiantes enfocándolos en más aplicaciones de
máquinas eléctricas.
Basados en teorías de sistemas de control y circuitos digitales, se busca aplicar dicho
conocimiento para hacer un variador de velocidad ajustado a un motor asíncrono el cual
ejecute un método conocido como variación de velocidad por variación de la frecuencia,
se puede realizar de manera digital usando como fundamento el PWM sinusoidal (Ibarra-
Jiménez 2009).
Al usar un sistema de control se puede entregar a su salida una señal cuadrada trifásica
que pasará por los IGBT dejando una señal de salida casi sinusoidal, trifásica y variable
en el tiempo con el fin de arrancar el motor asíncrono de manera suave y a su vez permitir
versatilidad para así manipularlo con el fin de usarlo en prácticas de laboratorio en un
ámbito académico.
Adentrándonos un poco más en los métodos para controlar un motor de corriente alterno
asíncrono, existen varios métodos durante la historia ha tenido una evolución
comenzando con un simple arranque del motor por reóstatos manuales y terminando con
los diversos métodos de controles digitales que nos permiten hacer un estricto
seguimiento a cada una de las variables eléctricas y mecánicas de este. A nivel mundia l
actualmente se dispone con el conocimiento necesario y dependiendo del lugar con la
tecnología necesaria para implementar cualquiera método, dejando así el criterio de
selección fundamentalmente por una consideración de tipo técnico-económica.
En Colombia vemos que las consideraciones técnicas se minimizan lo máximo posible ya
que el factor económico es lo más importante, porque se desfavorece la capacidad de
ingeniería interna, en realidad entre las consideraciones que definen el control digital de
un motor asíncrono encontramos.
1. METODOLOGÍA
Para el desarrollo de este proyecto, se eligió la técnica de variación de velocidad del motor
de inducción por medio del control de la frecuencia de entrada, esto debido a las
características de funcionamiento de una máquina asíncrona como se describe a
continuación.
1.1. MÁQUINAS DE INDUCCIÓN.
El funcionamiento de la máquina asíncrona se basa en el principio de la interacción
electromagnética entre el campo magnético giratorio, creado por un sistema de corrientes
trifásicas suministrada desde la red al devanado del estator y las corrientes que se inducen
3
en el devanado del rotor cuando el campo giratorio cruza sus hilos conductores (Hall
2007).
Cuando el campo giratorio tiene carácter sinusoidal su velocidad de rotación se describe
en la ecuación 1:
ns =120 f
P
Ecuación 1.
Dónde:
ns = Velocidad del campo magnético giratorio (velocidad síncrona) r/min.
f = frecuencia del suministro voltaje aplicado Hz.
P = número de polos del estator.
La velocidad del rotor puede expresarse en la ecuación 2 como:
nr = (1 − s)ns
Ecuación 2.
Dónde:
nr = velocidad del rotor r/min.
ns = velocidad síncrona r/min.
s = deslizamiento o resbalamiento de la máquina asíncrona.
Como vemos en la ecuación 1, la forma más sencilla de intervenir la velocidad del campo
giratorio (velocidad síncrona) es controlando la frecuencia de suministro de la tensión
aplicada. La velocidad de operación de un motor asíncrono es muy cercana a su velocidad
síncrona como vemos en la ecuación 2, un motor de inducción es esencialmente un motor
de velocidad constante cuando está conectado a una fuente de voltaje y frecuencia
constante. Sí el torque de carga se incrementa la velocidad cae en pequeña cantidad.
1.2.CARACTERIZACIÓN DE LA MÁQUINA DEL LABORATORIO.
Para el diseño del variador de velocidad se hace necesario conocer las características
técnicas más notables del motor de inducción DL 1021 disponible en el laboratorio de
máquinas eléctricas al cual se va a usar (Unilab s.a)
- Potencia: 1.1Kw.
- Tensión : 230/380 V ∆Y
- Corriente: 5/2.5 A
- Frecuencia : 60 Hz
- Velocidad: 2800 R.P.M.
4
2. INVERSOR PARA MOTOR DE CA.
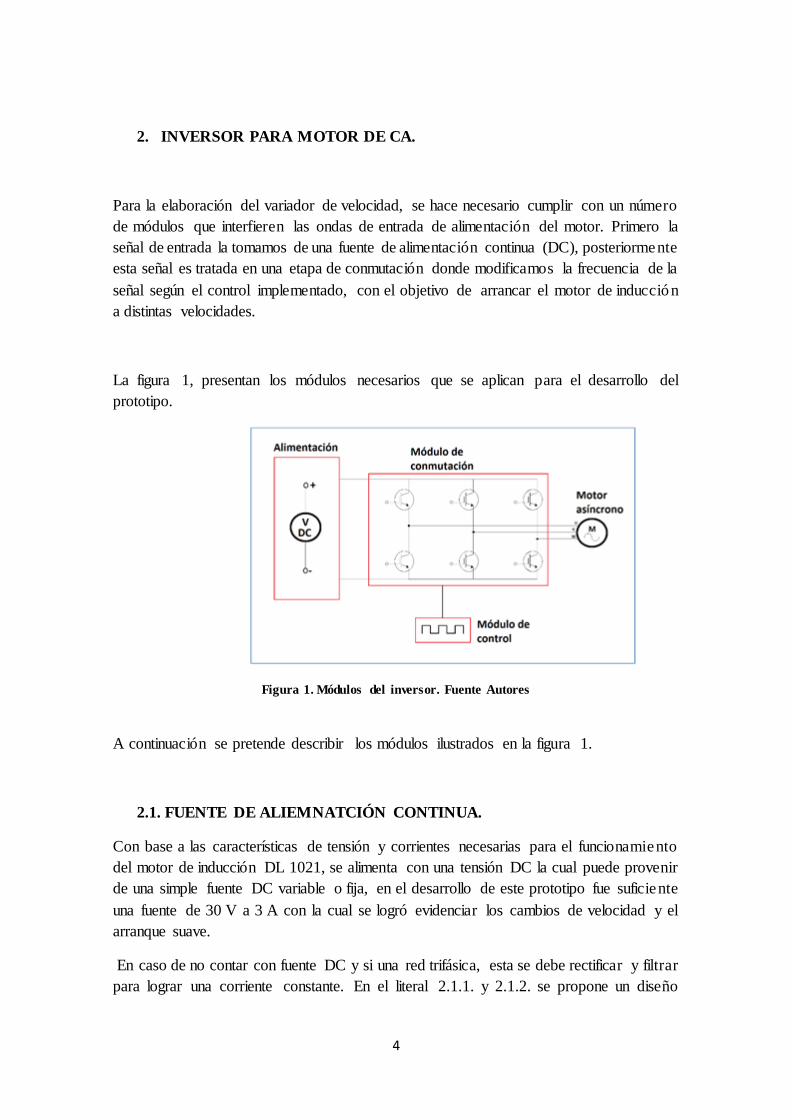
Para la elaboración del variador de velocidad, se hace necesario cumplir con un número
de módulos que interfieren las ondas de entrada de alimentación del motor. Primero la
señal de entrada la tomamos de una fuente de alimentación continua (DC), posteriormente
esta señal es tratada en una etapa de conmutación donde modificamos la frecuencia de la
señal según el control implementado, con el objetivo de arrancar el motor de inducción
a distintas velocidades.
La figura 1, presentan los módulos necesarios que se aplican para el desarrollo del
prototipo.
Figura 1. Módulos del inversor. Fuente Autores
A continuación se pretende describir los módulos ilustrados en la figura 1.
2.1. FUENTE DE ALIEMNATCIÓN CONTINUA.
Con base a las características de tensión y corrientes necesarias para el funcionamiento
del motor de inducción DL 1021, se alimenta con una tensión DC la cual puede provenir
de una simple fuente DC variable o fija, en el desarrollo de este prototipo fue suficiente
una fuente de 30 V a 3 A con la cual se logró evidenciar los cambios de velocidad y el
arranque suave.
En caso de no contar con fuente DC y si una red trifásica, esta se debe rectificar y filtrar
para lograr una corriente constante. En el literal 2.1.1. y 2.1.2. se propone un diseño
5
aplicable para rectificación y filtrado respectivamente de una fuente con tensión variable
a una directa.
2.1.1 RECTIFICACIÓN
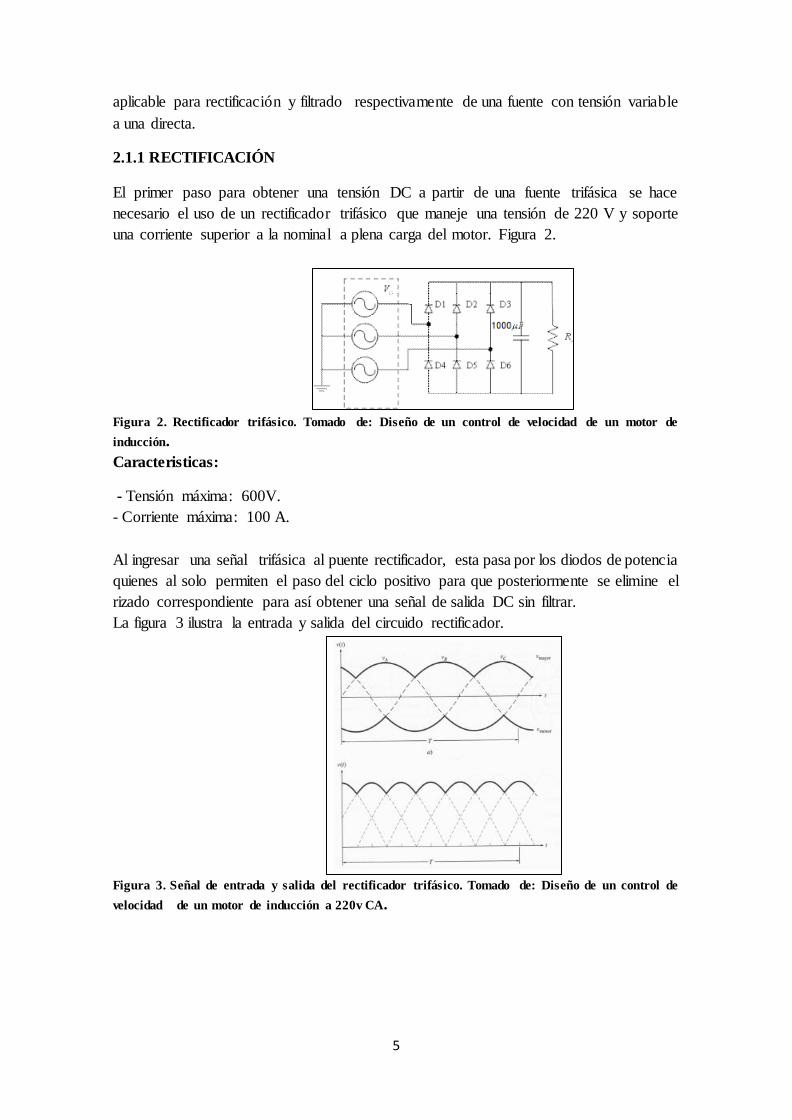
El primer paso para obtener una tensión DC a partir de una fuente trifásica se hace
necesario el uso de un rectificador trifásico que maneje una tensión de 220 V y soporte
una corriente superior a la nominal a plena carga del motor. Figura 2.
Figura 2. Rectificador trifásico. Tomado de: Diseño de un control de velocidad de un motor de
inducción.
Caracteristicas:
- Tensión máxima: 600V.
- Corriente máxima: 100 A.
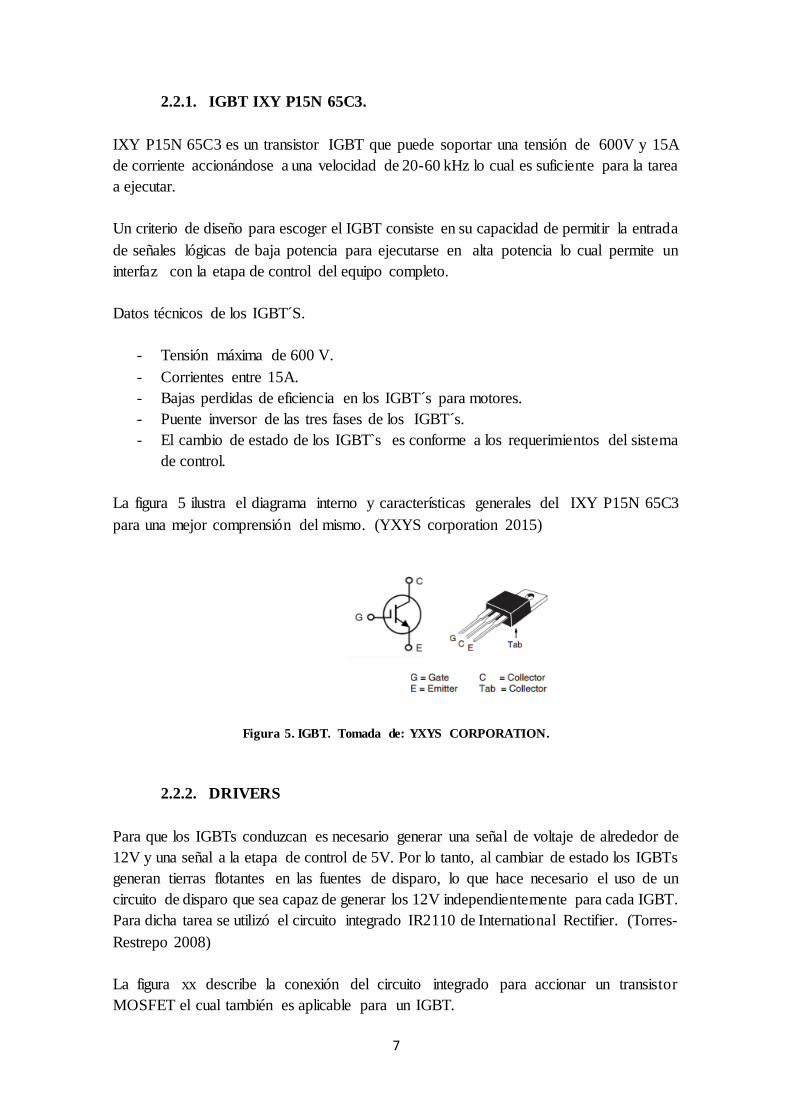
Al ingresar una señal trifásica al puente rectificador, esta pasa por los diodos de potencia
quienes al solo permiten el paso del ciclo positivo para que posteriormente se elimine el
rizado correspondiente para así obtener una señal de salida DC sin filtrar.
La figura 3 ilustra la entrada y salida del circuido rectificador.
Figura 3. Señal de entrada y salida del rectificador trifásico. Tomado de: Diseño de un control de
velocidad de un motor de inducción a 220v CA.

6
2.1.2. FILTRADO.
Para obtener una señal de salida más lineal se requiere calcular un capacitor que reduzca
el rizo de la señal de salida. Para cumplir a cabalidad con esa función, dicho condensador
debe tener unos mínimos criterios los cuales se reflejan en la ecuación 3.
𝐶𝑚𝑖𝑛 =2𝑃0
(𝑉𝑚𝑎𝑥2 − 𝑉𝑚𝑖𝑛
2 )𝑓𝑟𝑒𝑐
Ecuación 3.
Dónde:
𝑃0 ∶ 𝑝𝑜𝑡𝑒𝑛𝑐𝑖𝑎 𝑑𝑒𝑙 𝑒𝑞𝑢𝑖𝑝𝑜 𝑒𝑛 𝐾𝑊
𝑉𝑚𝑎𝑥 ∶ 𝑣𝑜𝑙𝑡𝑎𝑗𝑒 𝑝𝑖𝑐𝑜
𝑉𝑚𝑖𝑛 ∶ 𝑣𝑜𝑙𝑡𝑎𝑗𝑒 𝑚𝑖𝑛𝑖𝑚𝑜 𝑝𝑒𝑟𝑚𝑖𝑡𝑖𝑑𝑜
𝑓𝑟𝑒𝑐 = 60𝐻𝑧 ∗ 6 = 360𝐻𝑧
Basado en las características técnicas de la máquina y reemplazándolas en la ecuación se
tiene que:
𝐶𝑚𝑖𝑛 = 926𝑢𝐹 ≈ 1000𝑢𝐹
2.2. MÓDULO DE CONMUTACIÓN.
La etapa de conmutación de una señal DC se ejecuta por unos transistores llamados
IGBT. Estos dispositivos semiconductores hacen parte fundamental del inversor siendo
accionados por el sistema de control tal como se aprecia en la Figura 4.
Figura 4. Conmutación IGBT. Tomado de Accionamiento didáctico de frecuencia variable DL 2309
a1. De Lorenzo
La secuencia de conmutación que siguen los IGBT viene dada por un proceso previo de
modulación que será el que determine las características de la señal de salida, entre ellas
la forma, amplitud, frecuencia. (Unilab s.a).
7
2.2.1. IGBT IXY P15N 65C3.
IXY P15N 65C3 es un transistor IGBT que puede soportar una tensión de 600V y 15A
de corriente accionándose a una velocidad de 20-60 kHz lo cual es suficiente para la tarea
a ejecutar.
Un criterio de diseño para escoger el IGBT consiste en su capacidad de permitir la entrada
de señales lógicas de baja potencia para ejecutarse en alta potencia lo cual permite un
interfaz con la etapa de control del equipo completo.
Datos técnicos de los IGBT´S.
- Tensión máxima de 600 V.
- Corrientes entre 15A.
- Bajas perdidas de eficiencia en los IGBT´s para motores.
- Puente inversor de las tres fases de los IGBT´s.
- El cambio de estado de los IGBT`s es conforme a los requerimientos del sistema
de control.
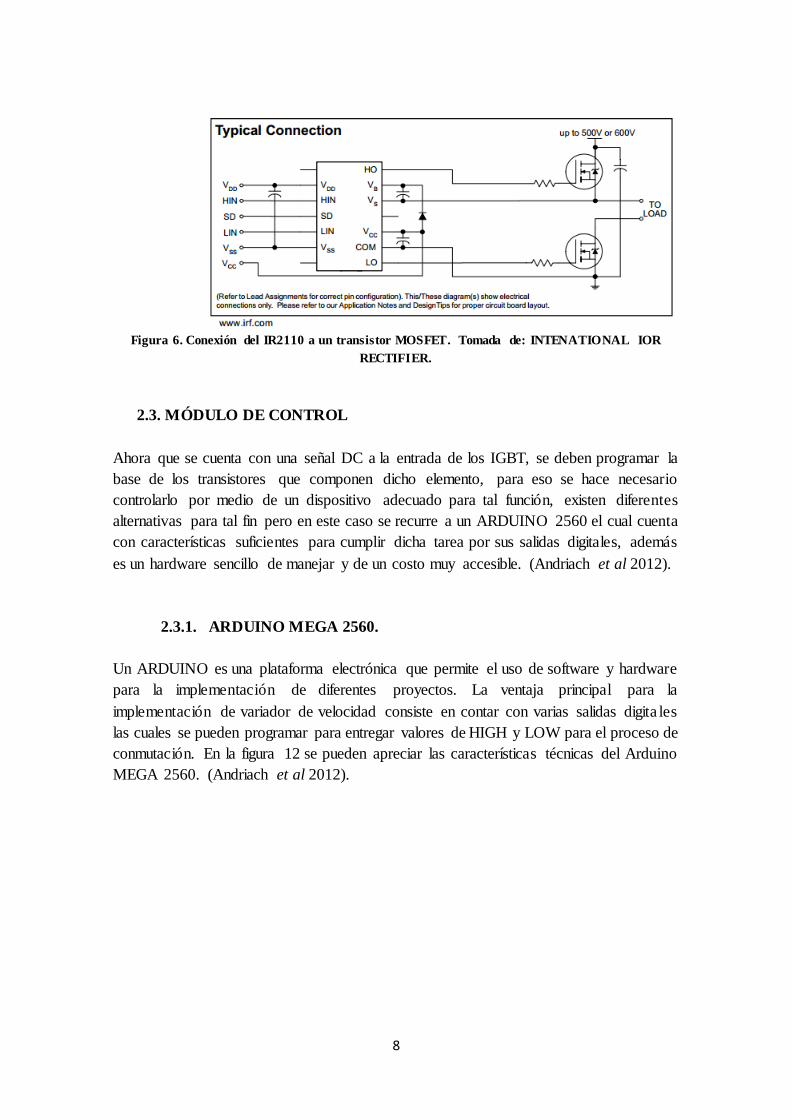
La figura 5 ilustra el diagrama interno y características generales del IXY P15N 65C3
para una mejor comprensión del mismo. (YXYS corporation 2015)
Figura 5. IGBT. Tomada de: YXYS CORPORATION.
2.2.2. DRIVERS
Para que los IGBTs conduzcan es necesario generar una señal de voltaje de alrededor de
12V y una señal a la etapa de control de 5V. Por lo tanto, al cambiar de estado los IGBTs
generan tierras flotantes en las fuentes de disparo, lo que hace necesario el uso de un
circuito de disparo que sea capaz de generar los 12V independientemente para cada IGBT.
Para dicha tarea se utilizó el circuito integrado IR2110 de International Rectifier. (Torres-
Restrepo 2008)
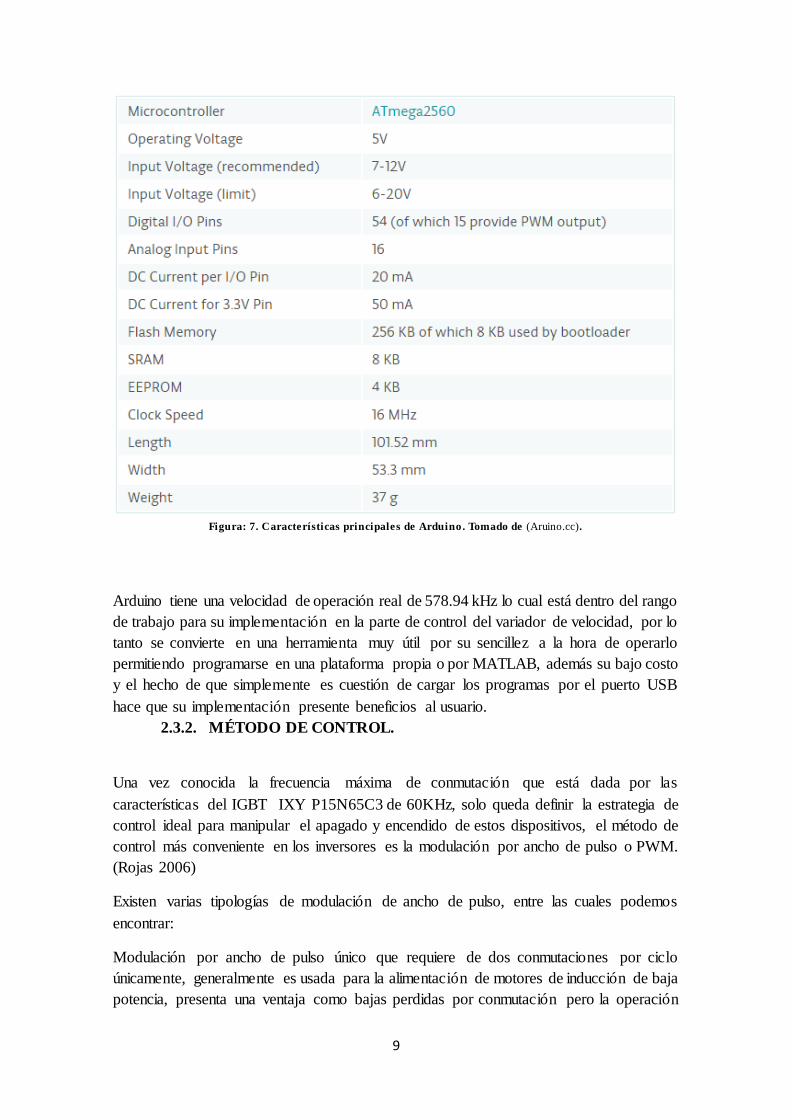
La figura xx describe la conexión del circuito integrado para accionar un transistor
MOSFET el cual también es aplicable para un IGBT.
8
Figura 6. Conexión del IR2110 a un transistor MOSFET. Tomada de: INTENATIONAL IOR
RECTIFIER.
2.3. MÓDULO DE CONTROL
Ahora que se cuenta con una señal DC a la entrada de los IGBT, se deben programar la
base de los transistores que componen dicho elemento, para eso se hace necesario
controlarlo por medio de un dispositivo adecuado para tal función, existen diferentes
alternativas para tal fin pero en este caso se recurre a un ARDUINO 2560 el cual cuenta
con características suficientes para cumplir dicha tarea por sus salidas digitales, además
es un hardware sencillo de manejar y de un costo muy accesible. (Andriach et al 2012).
2.3.1. ARDUINO MEGA 2560.
Un ARDUINO es una plataforma electrónica que permite el uso de software y hardware
para la implementación de diferentes proyectos. La ventaja principal para la
implementación de variador de velocidad consiste en contar con varias salidas digita les
las cuales se pueden programar para entregar valores de HIGH y LOW para el proceso de
conmutación. En la figura 12 se pueden apreciar las características técnicas del Arduino
MEGA 2560. (Andriach et al 2012).
9
Figura: 7. Características principales de Arduino. Tomado de (Aruino.cc).
Arduino tiene una velocidad de operación real de 578.94 kHz lo cual está dentro del rango
de trabajo para su implementación en la parte de control del variador de velocidad, por lo
tanto se convierte en una herramienta muy útil por su sencillez a la hora de operarlo
permitiendo programarse en una plataforma propia o por MATLAB, además su bajo costo
y el hecho de que simplemente es cuestión de cargar los programas por el puerto USB
hace que su implementación presente beneficios al usuario.
2.3.2. MÉTODO DE CONTROL.
Una vez conocida la frecuencia máxima de conmutación que está dada por las
características del IGBT IXY P15N65C3 de 60KHz, solo queda definir la estrategia de
control ideal para manipular el apagado y encendido de estos dispositivos, el método de
control más conveniente en los inversores es la modulación por ancho de pulso o PWM.
(Rojas 2006)
Existen varias tipologías de modulación de ancho de pulso, entre las cuales podemos
encontrar:
Modulación por ancho de pulso único que requiere de dos conmutaciones por ciclo
únicamente, generalmente es usada para la alimentación de motores de inducción de baja
potencia, presenta una ventaja como bajas perdidas por conmutación pero la operación
10
del motor de inducción se hace ineficiente ya que presenta un gran contenido de
armónicos por su onda cuasicuadrada. (Rojas 2006)
Modulación por ancho de pulso múltiple, en esta técnica se utiliza un tren de pulsos con
un mismo ancho por cada semiperiodo, en esta técnica se aprecia una reducción en el
contenido de armónicos pero la frecuencia en el inversor tiende a ser muy alta.
Modulación por ancho de pulso sinusoidal, en esta técnica también se utiliza un tren de
pulsos por cada semiperiodo, pero su característica principal radica en que la modulación
o el ancho de estos pulsos se determinan en función de una onda sinusoidal, ya que los
motores de inducción trabajan con ondas sinusoidales puras esta técnica reduce en gran
proporción el contenido armónico. (Rojas 2006)
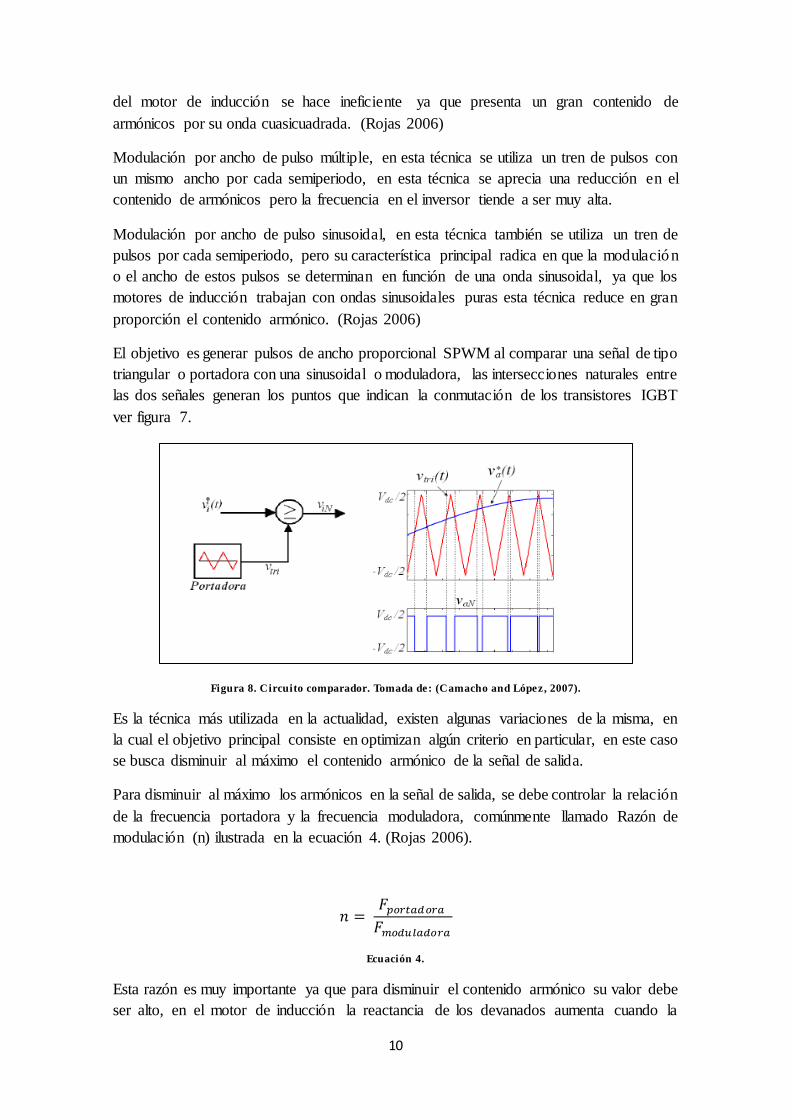
El objetivo es generar pulsos de ancho proporcional SPWM al comparar una señal de tipo
triangular o portadora con una sinusoidal o moduladora, las intersecciones naturales entre
las dos señales generan los puntos que indican la conmutación de los transistores IGBT
ver figura 7.
Figura 8. Circuito comparador. Tomada de: (Camacho and López, 2007).
Es la técnica más utilizada en la actualidad, existen algunas variaciones de la misma, en
la cual el objetivo principal consiste en optimizan algún criterio en particular, en este caso
se busca disminuir al máximo el contenido armónico de la señal de salida.
Para disminuir al máximo los armónicos en la señal de salida, se debe controlar la relación
de la frecuencia portadora y la frecuencia moduladora, comúnmente llamado Razón de
modulación (n) ilustrada en la ecuación 4. (Rojas 2006).
𝑛 = 𝐹𝑝𝑜𝑟𝑡𝑎𝑑𝑜𝑟𝑎
𝐹𝑚𝑜𝑑𝑢𝑙𝑎𝑑𝑜𝑟𝑎
Ecuación 4.
Esta razón es muy importante ya que para disminuir el contenido armónico su valor debe
ser alto, en el motor de inducción la reactancia de los devanados aumenta cuando la

11
frecuencia sube, siendo las armónicas más bajas la de mayor incidencia, adicionalmente
el motor trifásico equilibra todas las frecuencias que pueden ser divididas por tres.
Sin embargo no es conveniente tener una relación exageradamente elevada de la razón de
modulación (n) ya que implicaría tener muchos pulsos en un semi-ciclo, que provocarían
más des-energización en el tiempo, disminuyendo el rendimiento del inversor por
pérdidas de conmutación y agujeros en la señal de tensión.
2.3.3. CONSTRUCCIÓN Y SIMULACIÓN DE SEÑALES DE SALIDA
DEL INVERSOR.
Con base a la teoría expuesta, se recurre a simular en el software de versión gratuita Psim,
un circuito comparador de una señal triangular y tres sinusoidales desfasadas 120° que
determinan los pulsos de conmutación en tres módulos IGBT, las salidas se modelamos
con resistencias ya que son cargas lineales, que observamos en la figura 8.
Figura: 9. Circuito a ejecutar. Fuente autores.
Como punto de partida para nuestro diseño modelamos las tres señales sinusoida les
desfasadas 120° y las cruzamos con la señal portadora que en este caso es una señal
triangular, teniendo en cuenta los criterios mencionados anteriormente para la
optimización del inversor, nuestro razón de modulación es n=21. Para lo cual tendríamos
una frecuencia en la señal portadora de 1260Hz. Como se muestra en la Figura 9.
12
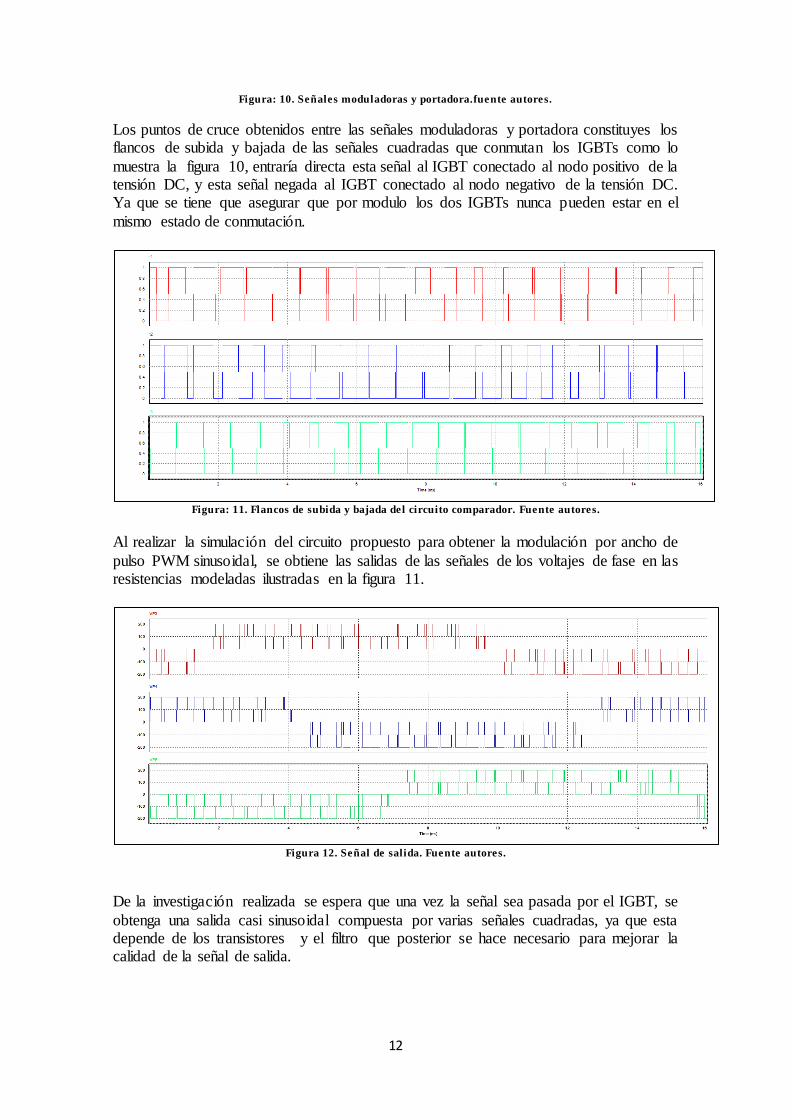
Figura: 10. Señales moduladoras y portadora.fuente autores.
Los puntos de cruce obtenidos entre las señales moduladoras y portadora constituyes los flancos de subida y bajada de las señales cuadradas que conmutan los IGBTs como lo
muestra la figura 10, entraría directa esta señal al IGBT conectado al nodo positivo de la tensión DC, y esta señal negada al IGBT conectado al nodo negativo de la tensión DC. Ya que se tiene que asegurar que por modulo los dos IGBTs nunca pueden estar en el
mismo estado de conmutación.
Figura: 11. Flancos de subida y bajada del circuito comparador. Fuente autores.
Al realizar la simulación del circuito propuesto para obtener la modulación por ancho de
pulso PWM sinusoidal, se obtiene las salidas de las señales de los voltajes de fase en las resistencias modeladas ilustradas en la figura 11.
Figura 12. Señal de salida. Fuente autores.
De la investigación realizada se espera que una vez la señal sea pasada por el IGBT, se
obtenga una salida casi sinusoidal compuesta por varias señales cuadradas, ya que esta depende de los transistores y el filtro que posterior se hace necesario para mejorar la calidad de la señal de salida.
13
3. APLICACIÓN ACADÉMICA.
El principal objetivo del prototipo expuesto consiste en que pueda ser una herramienta
útil para estudiantes del área de máquinas eléctricas y electrónica de potencia, para
comprender su funcionamiento en los siguientes literales se expone como se opera y que
pasos son necesarios en su uso.
3.1.INTERFAZ CON EL USUARIO.
Uno de los objetivos principales del proyecto es crear un variador de velocidad enfocado
al aprendizaje del estudiante, por esta razón se decido hacer una conexión directa entre
el inversor y una computadora con entrada USB que tenga instalado el software gratuito
de Arduino, esta conexión brinda muchas ventajas en la operación del inversor ademá s
de la posibilidad al usuario de participar en el control y construcción de las señales de
tensión suministradas al motor, entre las principales ventajas encontramos:
- Visualizar y modificar el programa en tiempo real implementado para el control
del motor sin desconectar o apagar ningún elemento que interviene en el montaje.
- Modificar la Frecuencia de entrada de la señal de tensión de alimentación del
motor mediante la modificación de los parámetros principales de control que
explicaremos más adelante.
- Modificar el Voltaje RMS visto por el motor mediante la modificación de los
parámetros asignados para el arranque suave implementado.
- Se tiene la capacidad para extender el análisis y extraer datos en tiempo real del
montaje, no implementado para esta tesis.
3.2.MODO DE USO.
Una vez instalado el software de Arduino en el computador que se va conectar al inversor,
cargamos los programas desarrollados para el control, de los cuales tenemos dos
opciones:
1. Cargar el programa “control 1”, en cual consiste en un arranque directo basado en
el método SPWM, donde el usuario tiene la posibilidad de cambiar la frecuencia
y el valor de tensión RMS visto por el motor al modificar las variables principa les
de control.
2. Cargar el programa “control 2”, en cual consiste en un arranque suave basado en
el método SPWM, donde el usuario tiene la posibilidad de cambiar la frecuencia
pero no el valor de Tensión RMS ya que esto se ejecuta automáticamente.
14
Igualmente dicha acción se puede ejecutar en MATLAB con las ventajas descritas
anteriormente. Este interfaz se planea de esa manera con el fin de interactuar más en el
proceso del PWM a la hora de usarse en el ámbito académico
A continuación explicaremos las variables principales de control en los dos programas y
su forma de utilización:
La variable “a” es la encargada del ciclo no útil del periodo, está configurada por defecto
con el valor de 1ms, y afecta directamente el valor RMS del voltaje de salida de la señal.
La variable “b” es la encargada del ciclo útil del periodo, está configurada por defecto
con el valor de 8ms.
La frecuencia de salida para el motor se representa mediante la siguiente ecuación:
Periodo salida = (9 ∗ a) + (9 ∗ b) [𝑚𝑠]
Ecuación 5.
Por lo tanto la frecuencia de salida será:
Ns =1
Periodo salida∗ 1000 [𝐻𝑧]
Ecuación 5.
En este caso por defecto la frecuencia de salida del programa será Ns = 12.5 Hz.
Con un periodo de 81ms. Como se muestra en la siguiente gráfica.

15
Figura 13. Señal de salida calculada. Fuente autores.
4. CONSTRUCCIÓN.
La elaboración del prototipo requiere el conglomerado de todos los módulos descritos
donde con ayuda de hojas técnicas de los diferentes semiconductores a implementar se
obtiene un equipo el cual se expone a continuación.
4.1.ESQUEMA ELÉCTRICO.
Con base a los diferentes módulos expuestos en el literal número 3, se pueden los
anteriores reunir en un diagrama eléctrico que representa el variador de velocidad
controlado por medio de un ARDUINO y los IR2110 en la parte de control para ser
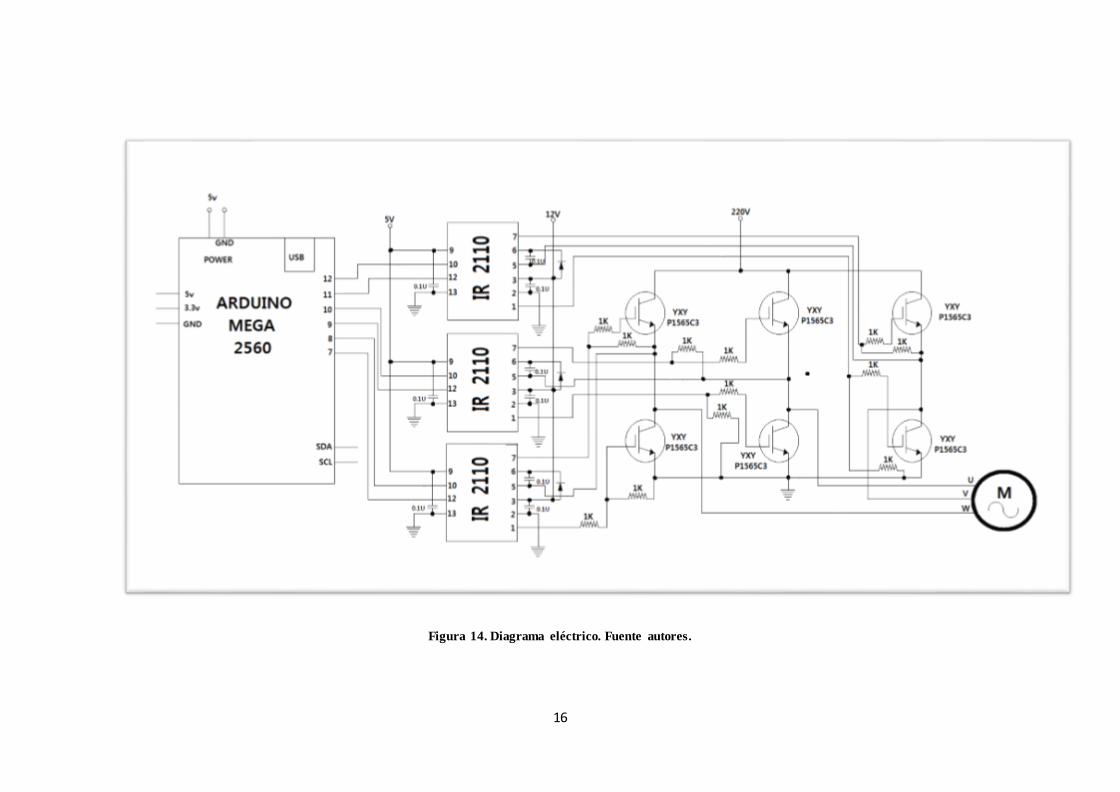
accionado en la etapa de potencia por los IGBT´s YXYS P1565C. La figura xx representa
el diagrama eléctrico general del variador de velocidad.
16
Figura 14. Diagrama eléctrico. Fuente autores.
17
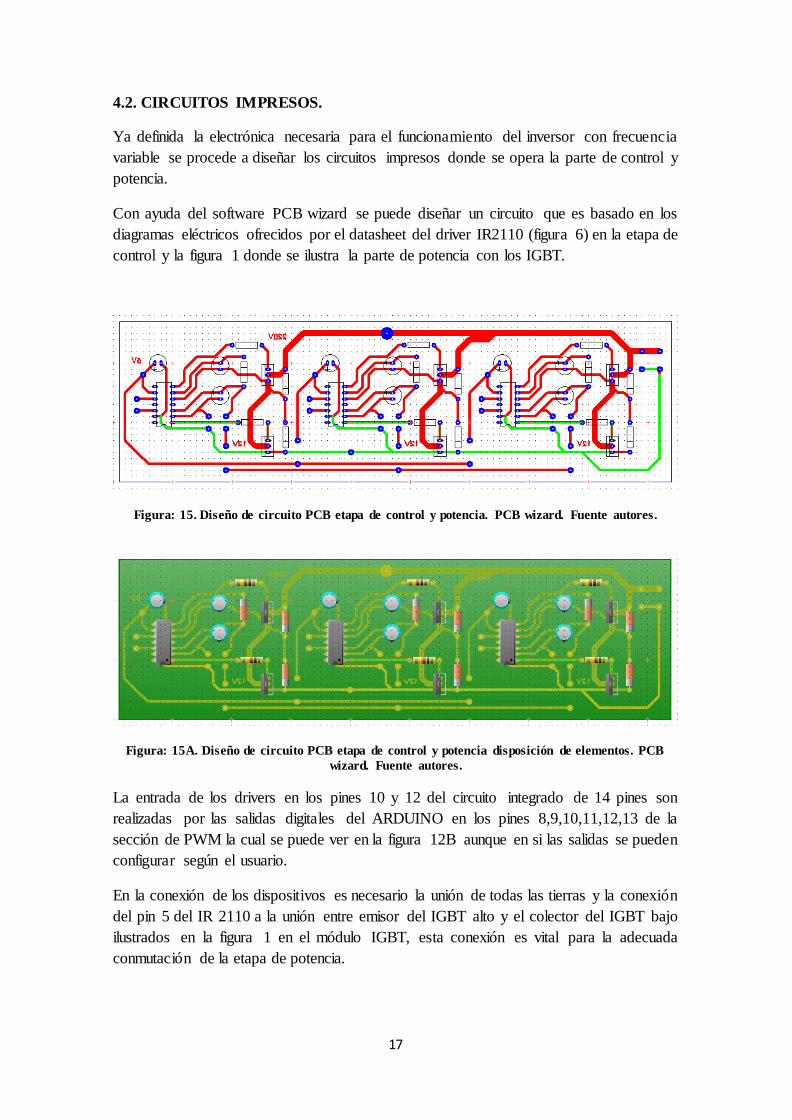
4.2. CIRCUITOS IMPRESOS.
Ya definida la electrónica necesaria para el funcionamiento del inversor con frecuencia
variable se procede a diseñar los circuitos impresos donde se opera la parte de control y
potencia.
Con ayuda del software PCB wizard se puede diseñar un circuito que es basado en los
diagramas eléctricos ofrecidos por el datasheet del driver IR2110 (figura 6) en la etapa de
control y la figura 1 donde se ilustra la parte de potencia con los IGBT.
Figura: 15. Diseño de circuito PCB etapa de control y potencia. PCB wizard. Fuente autores.
Figura: 15A. Diseño de circuito PCB etapa de control y potencia disposición de elementos. PCB
wizard. Fuente autores.
La entrada de los drivers en los pines 10 y 12 del circuito integrado de 14 pines son
realizadas por las salidas digitales del ARDUINO en los pines 8,9,10,11,12,13 de la
sección de PWM la cual se puede ver en la figura 12B aunque en si las salidas se pueden
configurar según el usuario.
En la conexión de los dispositivos es necesario la unión de todas las tierras y la conexión
del pin 5 del IR 2110 a la unión entre emisor del IGBT alto y el colector del IGBT bajo
ilustrados en la figura 1 en el módulo IGBT, esta conexión es vital para la adecuada
conmutación de la etapa de potencia.

18
Uno de los objetivos principales del proyecto es crear una variador de velocidad enfocado
a dar más flexibilidad y herramientas a la hora del aprendizaje del estudiante, por esta
razón la interfaz de usuario del variador de velocidad utilizada es el paquete de soporte
de MATLAB para Arduino, Donde el procesamiento se realiza en el ordenador a través
de un cable USB conectado a la placa de Arduino. (MathWorks, 2014).
Las ventajas principales de utilizar los paquetes MATLAB para Arduino, como enlace
entre el usuario y el variador de frecuencia son:
- visualizar y modificar el programa en tiempo real implementado para el control
del motor sin desconectar o apagar el programa que se está ejecutando.
- Modificar en tiempo real los parámetros de entrada y salida del sistema de control
empleado sin desconectar o apagar el programa que se está ejecutando.
- Modificar la Frecuencia de entrada de la señal de tensión de alimentación del
motor.
- Ajustar la magnitud de la señal de tensión de entrada del inversor con la cual se
desea trabajar
- Permite analizar y visualizar datos recogidos en la placa de Arduino mediante las
funciones avanzadas matemáticas y de trazado de MATLAB.
- Se puede leer datos en MATLAB de los diferentes dispositivos conectados a la
placa de Arduino utilizados principalmente para la seguridad en caso de fallas del
inversor.
5. RESULTADOS OBTENIDOS
El dispositivo diseñado e implementado se pone a prueba en los bancos de laboratorio
con el motor de inducción DL 1021 obteniendo los siguientes resultados.
5.1.DESFASE DE LA SEÑAL.
Al conectarse las puntas de un osciloscopio digital en una configuración fase – fase, se
ven las ondas de salida del SPWM, al compararlas se puede ver el desfase de las señales
para el correcto funcionamiento del motor trifásico.
19
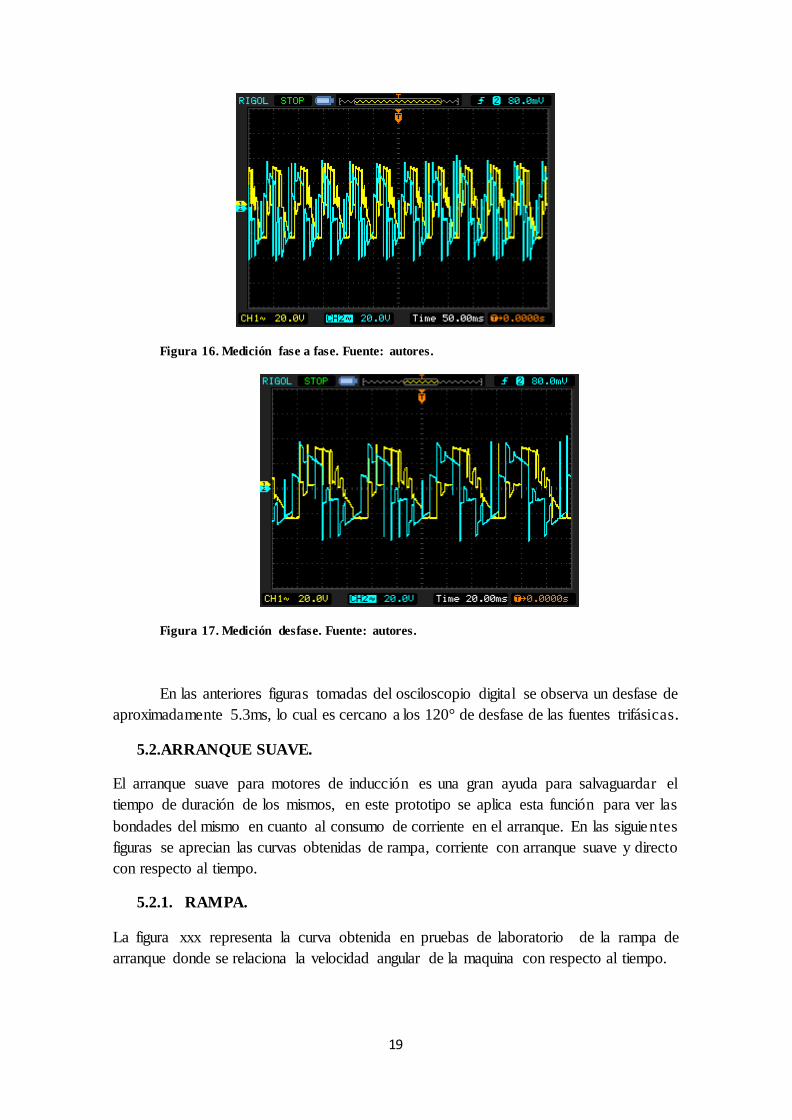
Figura 16. Medición fase a fase. Fuente: autores.
Figura 17. Medición desfase. Fuente: autores.
En las anteriores figuras tomadas del osciloscopio digital se observa un desfase de
aproximadamente 5.3ms, lo cual es cercano a los 120° de desfase de las fuentes trifásicas .
5.2.ARRANQUE SUAVE.
El arranque suave para motores de inducción es una gran ayuda para salvaguardar el
tiempo de duración de los mismos, en este prototipo se aplica esta función para ver las
bondades del mismo en cuanto al consumo de corriente en el arranque. En las siguientes
figuras se aprecian las curvas obtenidas de rampa, corriente con arranque suave y directo
con respecto al tiempo.
5.2.1. RAMPA.
La figura xxx representa la curva obtenida en pruebas de laboratorio de la rampa de
arranque donde se relaciona la velocidad angular de la maquina con respecto al tiempo.

20
Figura 18. Rampa de arranque. Fuente autores.
La rampa ilustra la forma del arranque suave en cuando a su programación el cual va
variando el valor de “a” conforme el tiempo disminuyendo el tiempo muerto
paulatinamente hasta cero para llegar al máximo valor de frecuencia de operación.
Por el tipo de proceso empleado en las ondas de salida y el valor de “a” presenta forma
de escalera ya que son los valores críticos para el cambio de velocidad interno en el motor.
5.2.2. COMPORTAMIENTO DE LA CORRIENTE.
Uno de los principales objetivos del arranque suave en motores de inducción es la
reducción del consumo de corriente al iniciar el giro del mismo, las figuras xx y xx
representan el arranque suave y directo respectivamente para ver de manera muy clara su
diferencia.
Figura 19. Corriente en arranque suave. Fuente autores.
0
100
200
300
400
500
600
700
800
900
1000
1100
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Vel
ocid
ad a
ngul
ar (
R.P
.M.)
Tiempo (s)
Rampa de arranque
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
Corr
ient
e (A
)
Tiempo (s)
Corriente en arranque suave
21
Figura 19. Corriente arranque directo. Fuente autores.
Son evidentes las diferencias de los dos tipos de arranque empleados, en el suave no se
sobrepasa una corriente de 0.8 A y en el directo se acercan a los 1.8 A pico, esto a una
mayor escala representa contrastes grandes con respecto a problemas de diseño y
estructura a la hora de arrancar motores.
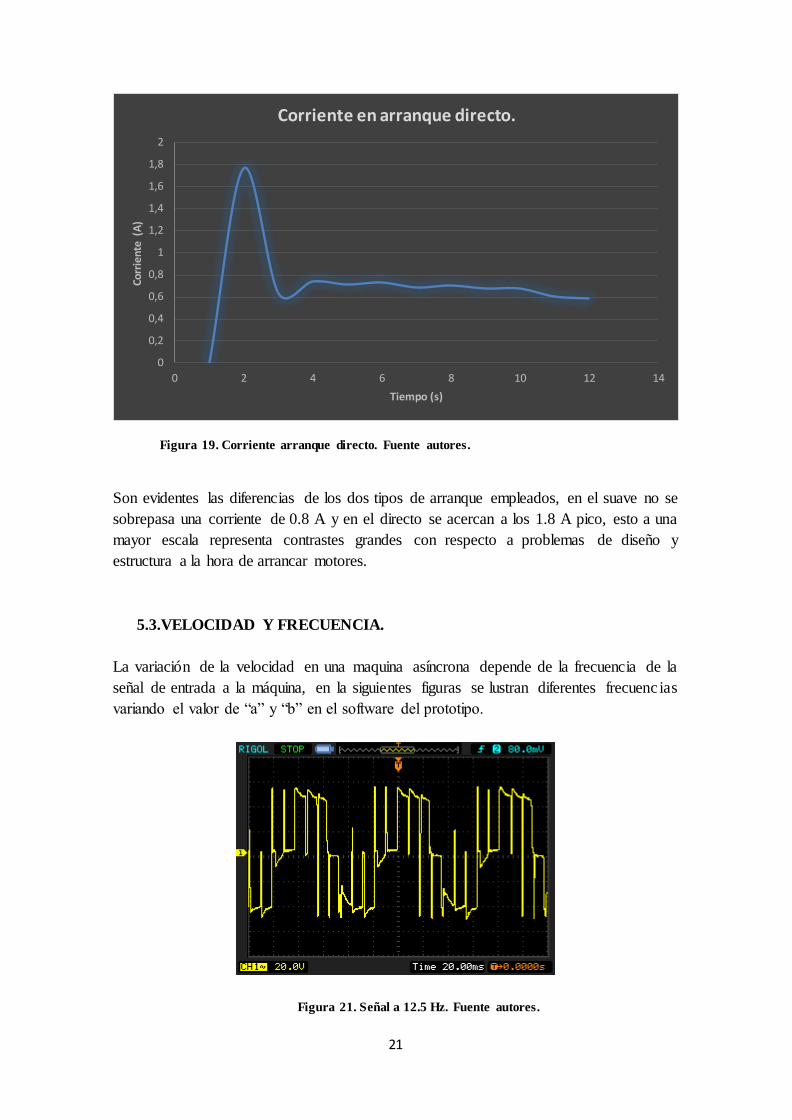
5.3.VELOCIDAD Y FRECUENCIA.
La variación de la velocidad en una maquina asíncrona depende de la frecuencia de la
señal de entrada a la máquina, en la siguientes figuras se lustran diferentes frecuenc ias
variando el valor de “a” y “b” en el software del prototipo.
Figura 21. Señal a 12.5 Hz. Fuente autores.
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 2 4 6 8 10 12 14
Corr
ient
e (A
)
Tiempo (s)
Corriente en arranque directo.
22
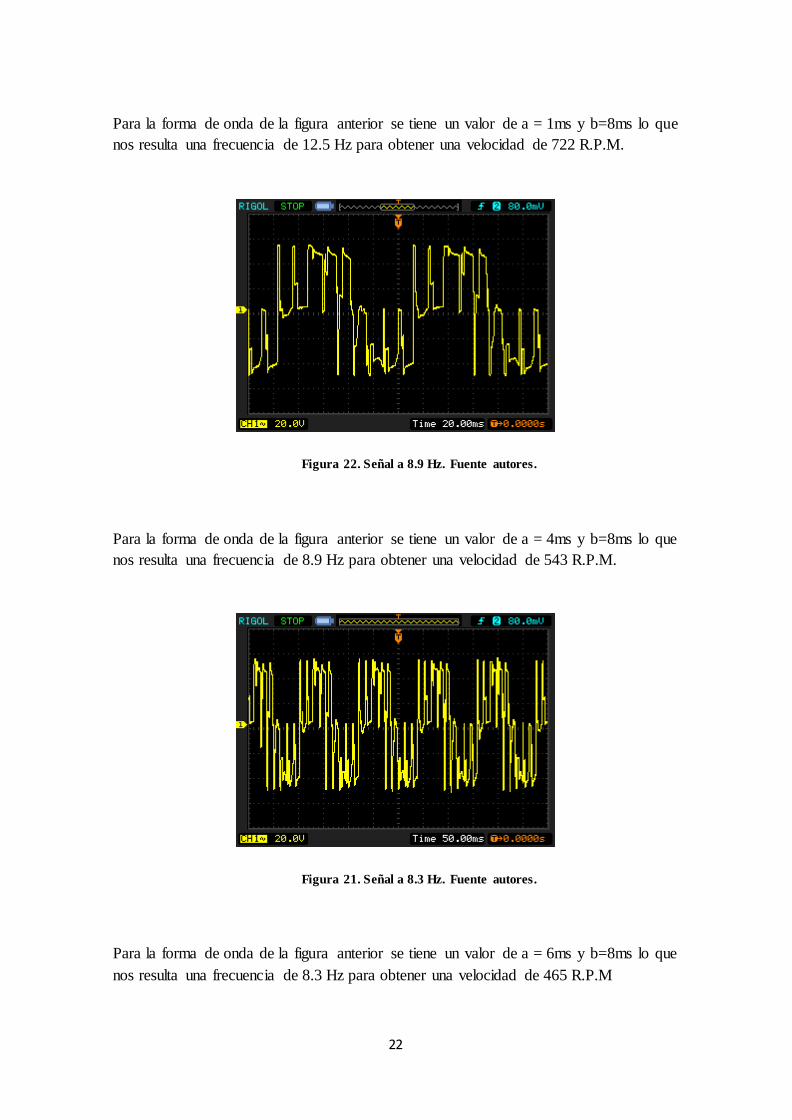
Para la forma de onda de la figura anterior se tiene un valor de a = 1ms y b=8ms lo que
nos resulta una frecuencia de 12.5 Hz para obtener una velocidad de 722 R.P.M.
Figura 22. Señal a 8.9 Hz. Fuente autores.
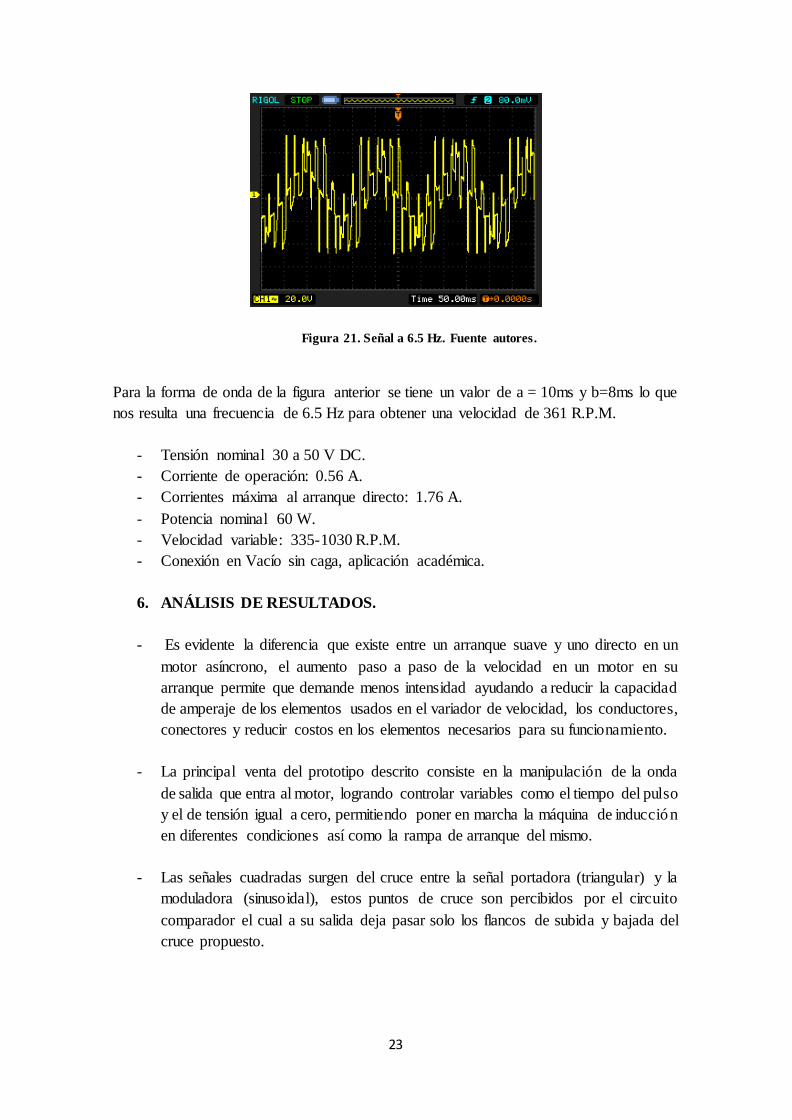
Para la forma de onda de la figura anterior se tiene un valor de a = 4ms y b=8ms lo que
nos resulta una frecuencia de 8.9 Hz para obtener una velocidad de 543 R.P.M.
Figura 21. Señal a 8.3 Hz. Fuente autores.
Para la forma de onda de la figura anterior se tiene un valor de a = 6ms y b=8ms lo que
nos resulta una frecuencia de 8.3 Hz para obtener una velocidad de 465 R.P.M
23
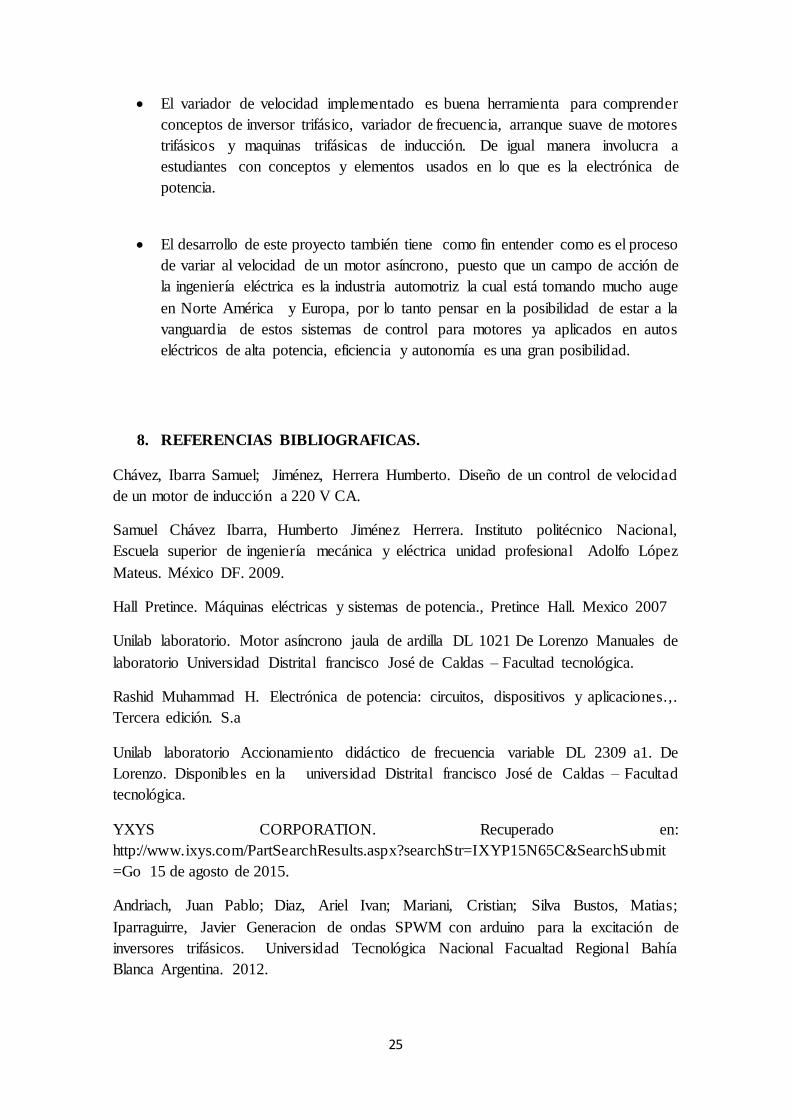
Figura 21. Señal a 6.5 Hz. Fuente autores.
Para la forma de onda de la figura anterior se tiene un valor de a = 10ms y b=8ms lo que
nos resulta una frecuencia de 6.5 Hz para obtener una velocidad de 361 R.P.M.
- Tensión nominal 30 a 50 V DC.
- Corriente de operación: 0.56 A.
- Corrientes máxima al arranque directo: 1.76 A.
- Potencia nominal 60 W.
- Velocidad variable: 335-1030 R.P.M.
- Conexión en Vacío sin caga, aplicación académica.
6. ANÁLISIS DE RESULTADOS.
- Es evidente la diferencia que existe entre un arranque suave y uno directo en un
motor asíncrono, el aumento paso a paso de la velocidad en un motor en su
arranque permite que demande menos intensidad ayudando a reducir la capacidad
de amperaje de los elementos usados en el variador de velocidad, los conductores,
conectores y reducir costos en los elementos necesarios para su funcionamiento.
- La principal venta del prototipo descrito consiste en la manipulación de la onda
de salida que entra al motor, logrando controlar variables como el tiempo del pulso
y el de tensión igual a cero, permitiendo poner en marcha la máquina de inducción
en diferentes condiciones así como la rampa de arranque del mismo.
- Las señales cuadradas surgen del cruce entre la señal portadora (triangular) y la
moduladora (sinusoidal), estos puntos de cruce son percibidos por el circuito
comparador el cual a su salida deja pasar solo los flancos de subida y bajada del
cruce propuesto.

24
- Se obtuvo una señal de salida variable en el tiempo la cual por medio de un sistema
de control se le puede modificar la frecuencia de la misma permitiendo una
manipulación de manera muy simple.
- Para usos académicos el prototipo implementado presenta gran flexibilidad a la
hora de usarse puesto que acceder a la plataforma de programación es muy
sencillo así como varias las condiciones de velocidad y arranque.
- Gracias al variador de velocidad un estudiante puede evidenciar en tiempo real
como puede cambiar la frecuencia de salida de la señal de entrada al motor y
entender cómo funcionan este tipo de equipos, comprendiendo también como
influye la corriente en un arranque suave y directo para motor asíncrono trifásico.
7. CONCLUSIONES.
De la investigación y posterior simulación realizada se puede concluir lo siguiente:
El sistema de control PWM sinusoidal es una aplicación muy importante en
sistemas trifásicos de corriente continua, ya sean en inversores para variadores de
velocidad, ups entre otras.
Dependiendo de la aplicación en una máquina eléctrica de inducción siempre será
mejor el uso de un arrancador suave puesto que la corriente aumenta hasta llegar
a la nominal sin picos elevados que surgen en un arranque directo.
Con la ayuda de simuladores y conceptos de sistemas análogos, fue posible
conocer para un posterior moldeamiento la señal cuadrada de salida de un pwm
sinusoidal el cual al aplicarla en un sistema de control, se puede modificar su
ancho de pulso para variar factores como amplitud y frecuencia con la señal
moduladora que se compara al inicio.
Para la polarización de varios IGBT o MOSFET que cumplen las funciones cierre
y apertura de señales se hace necesario el uso de drivers que separen las tierras de
cada transistor puesto que al no aplicar el mismo se presentan problemas de
amplitud de la señal de salida del inversor.
El uso del driver IR 2110 permite conectar el sistema de control que trabaja a 5V,
el de polarización a 12V y conmutación a 200V o cualquier valor de amplitud
que se desee usar.
25
El variador de velocidad implementado es buena herramienta para comprender
conceptos de inversor trifásico, variador de frecuencia, arranque suave de motores
trifásicos y maquinas trifásicas de inducción. De igual manera involucra a
estudiantes con conceptos y elementos usados en lo que es la electrónica de
potencia.
El desarrollo de este proyecto también tiene como fin entender como es el proceso
de variar al velocidad de un motor asíncrono, puesto que un campo de acción de
la ingeniería eléctrica es la industria automotriz la cual está tomando mucho auge
en Norte América y Europa, por lo tanto pensar en la posibilidad de estar a la
vanguardia de estos sistemas de control para motores ya aplicados en autos
eléctricos de alta potencia, eficiencia y autonomía es una gran posibilidad.
8. REFERENCIAS BIBLIOGRAFICAS.
Chávez, Ibarra Samuel; Jiménez, Herrera Humberto. Diseño de un control de velocidad
de un motor de inducción a 220 V CA.
Samuel Chávez Ibarra, Humberto Jiménez Herrera. Instituto politécnico Nacional,
Escuela superior de ingeniería mecánica y eléctrica unidad profesional Adolfo López
Mateus. México DF. 2009.
Hall Pretince. Máquinas eléctricas y sistemas de potencia., Pretince Hall. Mexico 2007
Unilab laboratorio. Motor asíncrono jaula de ardilla DL 1021 De Lorenzo Manuales de
laboratorio Universidad Distrital francisco José de Caldas – Facultad tecnológica.
Rashid Muhammad H. Electrónica de potencia: circuitos, dispositivos y aplicaciones.,.
Tercera edición. S.a
Unilab laboratorio Accionamiento didáctico de frecuencia variable DL 2309 a1. De
Lorenzo. Disponibles en la universidad Distrital francisco José de Caldas – Facultad
tecnológica.
YXYS CORPORATION. Recuperado en:
http://www.ixys.com/PartSearchResults.aspx?searchStr=IXYP15N65C&SearchSubmit
=Go 15 de agosto de 2015.
Andriach, Juan Pablo; Diaz, Ariel Ivan; Mariani, Cristian; Silva Bustos, Matias;
Iparraguirre, Javier Generacion de ondas SPWM con arduino para la excitación de
inversores trifásicos. Universidad Tecnológica Nacional Facualtad Regional Bahía
Blanca Argentina. 2012.
26
López Mesa Diana Jimena, Camacho Muñoz Guillermo Alberto, Díaz Chávez Jaime
Oscar, Gaviria López Carlos Alberto. Modulación Pwm Aplicada A Inversores Trifás icos
Dentro Del Esquema De Accionamientos Eléctricos Ac. S.A
Torres P Carlos Andrés, Restrepo Patiño Carlos, Diseño y construcción de un inversor
trifásico. Scientia Et Technica. vol. XIV, núm. 40. Colombia, 2008
International IOR Rectifier. 2015. tomado de: http://www.irf.com/produc t-
info/datasheets/data/ir2110.pdf . Recuperado el 23 de julio de 2015.
Rojas, Vargas Cesar Augusto. Diseño y simulación de técnicas de modulación pwm
natural para el control de motores trifásicos. Pamplona. 2006
Esquema del ARDUINO MEGA 2560 tomado de:
http://savageelectronics.blogspot.com.co/2011/01/arduino-y-dynamixel-ax-12.html
2011.
https://www.arduino.cc/en/Main/ArduinoBoardMega2560