dinamica.docx
TRANSCRIPT

Unidad 3Cinematica del cuerpo rigido
Unidad 3: Cinematica del cuerpo rígido
pág.
3.1 Traslación de cuerpo rígido …………………………….. 2
3.2 Rotación alrededor de un eje fijo …………………………... 3
3.3 Movimiento plano general ………………………………….. 5
P á g i n a 1 | 7
Unidad 3Cinematica del cuerpo rigido
Traslación de un Cuerpo Rígido
La traslación de un cuerpo rígido en donde T = (tx, ty, tz) representa el vector de traslación y ´ r = (rx, ry, rz) es el punto que se va trasladar se define a continuación: ´
r ´ = T + r (2.2)
La rotación de un cuerpo r ıgido en donde R es la matriz de transformación se define a continuación:
R´ = Rr (2.3)
Para un mejor manejo de las variables, la rotación y traslación de un cuerpo rígido se encapsulan en una forma matricial. Para el caso de 2D en una matriz de tres columnas por tres reglones y en 3D en una matriz de cuatro columnas por cuatro reglones.
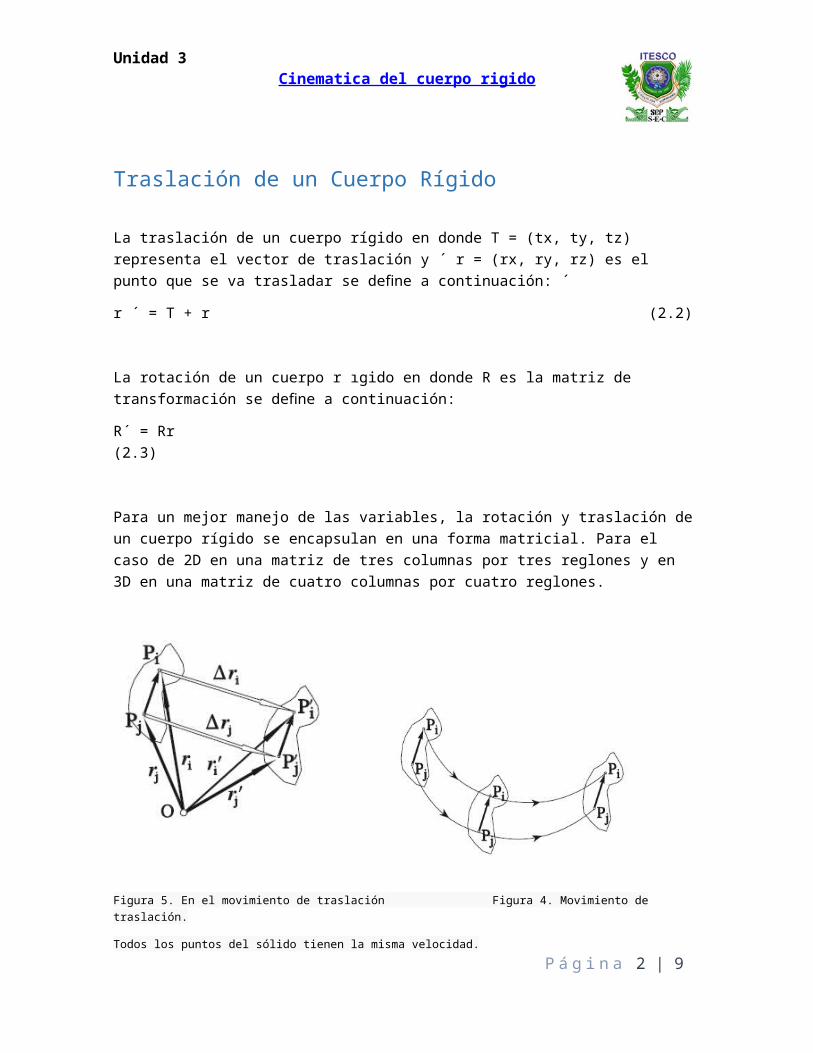
Figura 5. En el movimiento de traslación Figura 4. Movimiento de traslación.
Todos los puntos del sólido tienen la misma velocidad.
P á g i n a 2 | 7

Unidad 3Cinematica del cuerpo rigido
Rotación con respecto a un eje fijo
P á g i n a 3 | 7

Unidad 3Cinematica del cuerpo rigido
P á g i n a 4 | 7

Unidad 3Cinematica del cuerpo rigido
MOVIMIENTO PLANO GENERAL:
De entre los posibles movimientos de un sólido rígido, se dice que un sólido “2” realiza
un movimiento plano respecto a un sólido “1” si los desplazamientos de todos sus
puntos son permanentemente paralelos a un plano fijo en el sistema de referencia ligado
al sólido 1. Este plano se denomina plano director, ΠD del movimiento plano.
Así, por ejemplo, el movimiento que realiza el chasis de un coche, respecto a la calzada
por la que éste circula, es un movimiento plano.
También lo es el movimiento de una de sus ruedas cuando el coche avanza en línea
recta. Sin embargo, en ese caso, el plano director no es el plano de la calzada, sino uno
perpendicular a ella.
Cualquier plano paralelo a un plano director del movimiento {21} funciona también como
plano director de dicho movimiento, por lo que ese término designa realmente a toda la
familia de planos paralelos, caracterizados por una perpendicular común. Esta dirección
normal a la familia de planos directores puede tomarse siempre como eje OZ (o cualquier
otra dirección fija que nos convenga) y el vector unitario normal a los planos directores
puede ser denotado como
Propiedades del movimiento plano
Un movimiento plano de un sólido satisface, entre otras, las siguientes propiedades:
1) Las velocidades de todos los puntos del sólido se encuentran contenidas en
planos paralelos
Es la condición definitoria del movimiento plano.
2) Las aceleraciones de todos los puntos son siempre paralelas al plano
director
Puesto que la identidad anterior se cumple en cada instante, podemos derivar en
ella respecto al tiempo
P á g i n a 5 | 7

Unidad 3Cinematica del cuerpo rigido
3) La trayectoria de cada uno de los puntos es plana
Puesto que la velocidad y la aceleración de cada punto son tangentes al plano
director, el vector binormal de cada trayectoria es siempre perpendicular al plano y
por tanto constante.
4) La velocidad angular del movimiento {21} es perpendicular al plano director (o
nula)
Por tratarse de un movimiento rígido, para cualesquiera dos puntos del sólido 2 se
cumple
Multiplicando aquí escalarmente por el vector normal al plano director
Puesto que esta identidad debe cumplirse para cualquier par de puntos, la única
posibilidad es que
Esto permite tratar a la velocidad angular como una cantidad escalar, puesto que
su dirección es conocida. El sentido de la velocidad angular lo da el signo de la
cantidad escalar ω21.
5) La aceleración angular del movimiento {21} es perpendicular al plano director
Es consecuencia inmediata de que la velocidad angular posea dirección constante
6) Son compatibles con un movimiento plano los movimientos instantáneos {21} de
reposo, traslación o rotación, pero no el helicoidal
Si entonces el movimiento {21} es un estado de reposo o es una
traslación.
Si la velocidad angular no es nula, la velocidad de deslizamiento vale 0
P á g i n a 6 | 7

Unidad 3Cinematica del cuerpo rigido
Como se mencionó anteriormente, el movimiento plano general es la combinación de una traslación y una rotación alrededor de un punto (intersección del eje con el plano de movimiento) arbitrariamente seleccionado.
Entonces de acuerdo a la figura 3-7, para determinar la velocidad del punto A se debe conocer la velocidad de cualquier otro punto, por ejemplo B, y la velocidad angular del cuerpo en el instante considerado.
Figura 3-7
En consecuencia la velocidad comprende una velocidad de traslación, y otra debida a la rotación alrededor de B
Esta expresión se puede obtener a partir de los vectores de posición de A y B, [Fig. 3-8].
Figura 3-8
P á g i n a 7 | 7