departamento electrónica a proyecto u electrococo · – sistema de absorción y disparo de...
TRANSCRIPT

DepartamentoElectrónica
PROYECTO:
DEPECA - UAH
ElectrococoElectrococoSeminario de Microrrobots
Marzo 2006
Oscar González Martínez

PROYECTO: “Electrococo”
● Fue construido para participar en la Competición Europea de Robótica “EUROBOT” en la edición de 2004.
DepartamentoElectrónica

PROYECTO: “Electrococo”
● Proyecto financiado por el Departamento de Electrónica en el que participaron 15 personas de diferentes carreras.
● En su realización se han empleado sistemas implementados en TFC's de varios de los participantes en el proyecto:– Control de Motores, Sistema de Comunicación
entre microcontroladores, Sistema de Posicionamiento por Balizas IR.
DepartamentoElectrónica
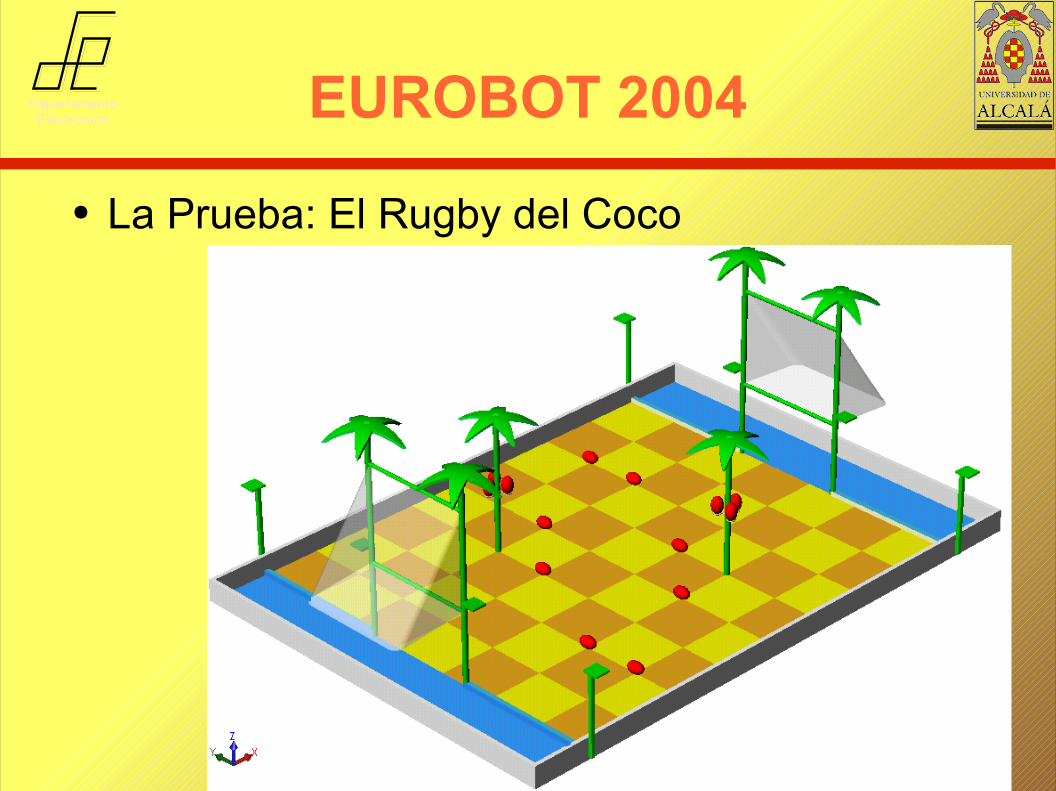
EUROBOT 2004
● La Prueba: El Rugby del Coco
DepartamentoElectrónica

Electrococo● Ejemplo de un sistema robótico “Complejo”.● Características Técnicas:
– Hardware controlado por una red de microcontroladores.
– Como “cerebro” del sistema se utiliza un PC empotrado: VIA EPIA M6000
– Sistema de control de tracción.
– Sistema de Posicionamiento relativo por medio de balizas IR
– Sistema de absorción y disparo de “objetos diversos”: Pelotas.
– Sistema de Visión artificial con reconocimiento “básico” de formas.
– Comportamiento autónomo o telecontrolado. Sistema de Telemetría
– Sistema de Telemetría y Control móvil autónomo.
– Dispone de un módulo de comunicaciones y un API para la programación de la platafoma en lenguaje de alto nivel.
DepartamentoElectrónica
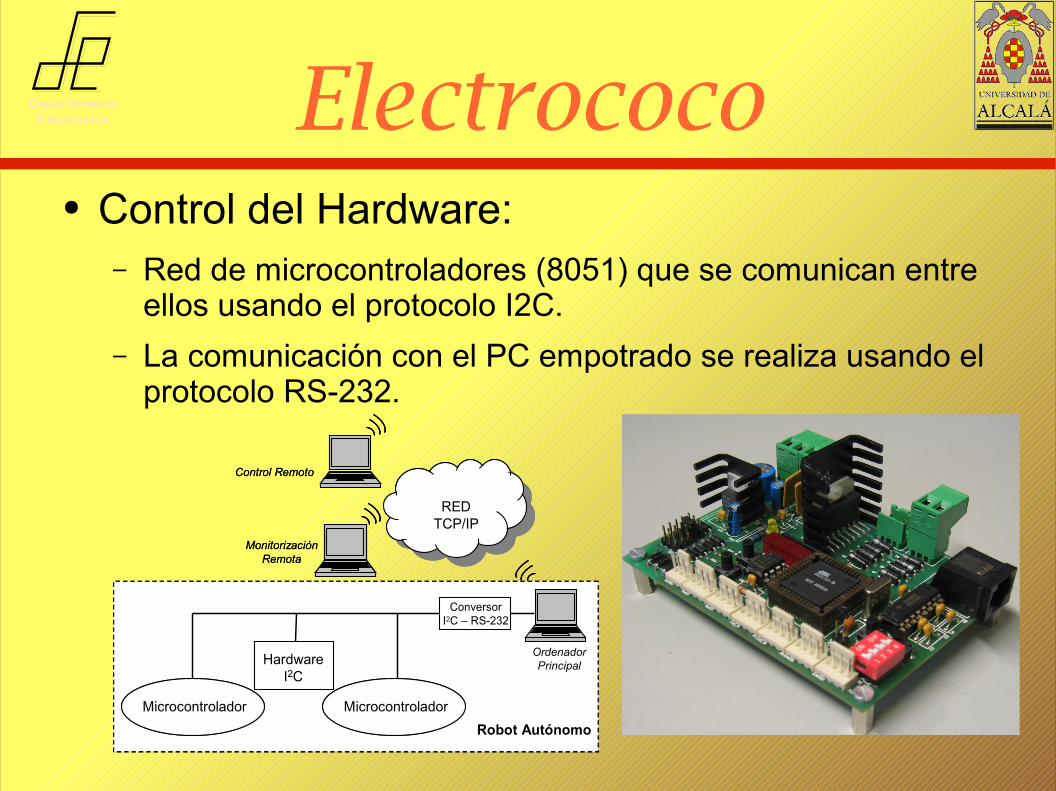
Electrococo● Control del Hardware:
– Red de microcontroladores (8051) que se comunican entre ellos usando el protocolo I2C.
– La comunicación con el PC empotrado se realiza usando el protocolo RS-232.
Microcontrolador Microcontrolador
HardwareI2C
ConversorI2C – RS-232
REDTCP/IP
OrdenadorPrincipal
MonitorizaciónRemota
Control Remoto
Robot Autónomo
MicrocontroladorMicrocontrolador MicrocontroladorMicrocontrolador
HardwareI2C
HardwareI2C
ConversorI2C – RS-232
REDTCP/IP
OrdenadorPrincipal
MonitorizaciónRemota
Control Remoto
Robot Autónomo
DepartamentoElectrónica

Electrococo● PC Empotrado:
– Controla TODO el sistema comunicándose con la red de microcontroladores por medio del puerto serie (RS-232).
– Permite programar el robot desde un lenguaje de alto nivel: C/C++.
– Dota al sistema de una
determinada “inteligencia”.
DepartamentoElectrónica

Electrococo● Sistema de Tracción: Motores
– Tracción diferencial: 2 ruedas motrices
2 ruedas locas
DepartamentoElectrónica

Electrococo● Sistema “Coge-Pelotas” y de Disparo
DepartamentoElectrónica

Electrococo● Sistema de Posicionamiento
– Usa 3 balizas transmisoras y un receptor que por medio de algoritmos de triangulación consigue conocer su posición en el campo.
DepartamentoElectrónica
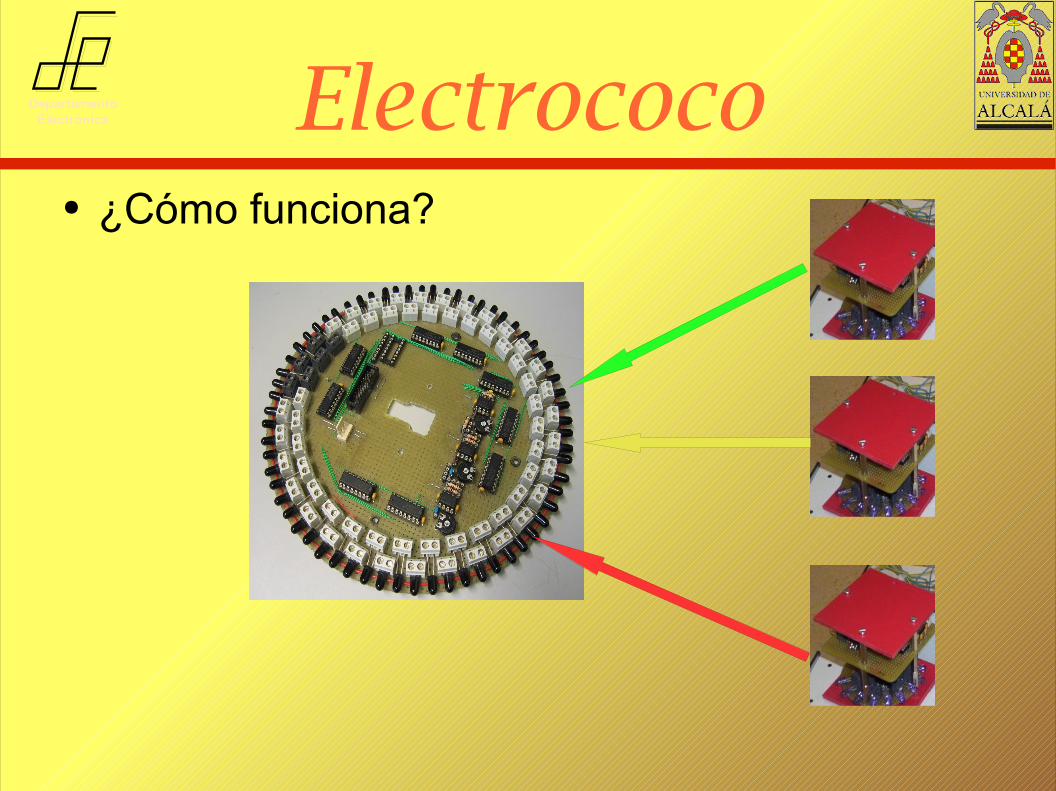
Electrococo● ¿Cómo funciona?
DepartamentoElectrónica
Muchas GraciasDepartamento
Electrónica