departamento de aeronáutica mecanismos y sistemas de … reguladores v... · mecanismos y...
TRANSCRIPT
Mecanismos y Sistenmas de Aeronaves Reguladores
Página 1 de29
Departamento de Aeronáutica Mecanismos y Sistemas de Aeronaves
Reguladores
0.-Introducción. Pag. 2
1.-Reguladores – clasificación. Pag.2 a 4
2.-Reguladores a fuerza centrífuga. Pag. 5 a 19
3.-Reguladores en sistemas de hélices de paso variable.- Regulador tipo Hartnell.
Pag.19
4.-Reguladores axiales. Pag. 19 a 29
4.1- Regulador a péndulo. Pag. 19 a 26
4.2- Regulador a volante. Pag. 26 a 29
Apéndice de estabilidad.

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 2 de29
En muchos procesos y aplicaciones mecánicas, sobre todo las aeronáuticas, es necesario mantener los valores de ciertas magnitudes de estos, dentro de límites preestablecidos. Dichos procesos deben ser controlados entonces manual o automáticamente. Un esquema básico de control puede ser el siguiente: Para el caso de una aeronave que hay que controlar, el piloto seria el órgano de control (control manual). Para el caso de maquinas en las cuales se requiere controlar su velocidad, es decir mantenerla dentro de límites preestablecidos, debido al surgimiento de variaciones en los pares motores y/o resistentes, el mecanismo que hace las funciones de sensor y de organo de control, es un regulador. 1.-Reguladores – Clasificación. Un regulador es un dispositivo capaz de graduar automáticamente la potencia de una máquina, que varía continuamente. El regulador participa del movimiento de la máquina a la que pertenece, de manera que un cambio en su velocidad, por ejemplo, debido a una variación en la carga, produce correspondientemente un cambio en las partes móviles del regulador, que a su vez, mediante un adecuado mecanismo, hace cambiar la presión ó la cantidad de fluido de un determinado mecanismo (vapor, nafta, etc.) suministrado a la maquina.
Desviaciones Sistema controlado
Instrumento ó sensor
Organo de comando.
Organo de control
Perturbaciones
Señales Acción de corrección
Corrección. (orden)
Figura 1

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 3 de29
Esquema básico de un regulador: La acción de un regulador no debe confundirse con la del volante de inercia de un motor. Este, que actúa como un almacenador de energía, es útil para regular la velocidad durante intervalos de tiempo pequeños del ciclo de un motor, mientras que la función del regulador es regular la velocidad durante intervalos mucho mayores, manteniendo un equilibrio entre la energía suministrada al motor y la resistencia a vencer. En síntesis, los reguladores son dispositivos destinados a oponerse a eventuales perturbaciones de un movimiento uniforme. De acuerdo a la disposición de las masas giratorias y el método de conectarlos al motor, los reguladores pueden clasificarse, en general, en dos tipos: a) Reguladores centrífugos (ó de bolas). b) Reguladores axiales. Entre los reguladores centrífugos podemos nombrar: Regulador tipo Watt (Fig. 3): Consta de dos masas rotantes que mueven un buje que desliza a
lo largo de un eje y acciona un cuerno de comando. Regulador tipo Porter (Fig. 4): Es similar al anterior pero tiene una masa central cuya
gravedad compensa ampliamente la acción centrifuga de los contrapesos. Regulador tipo Hartnell (Fig. 5): Se caracteriza por disponer de un resorte de compresión que
se opone al movimiento del buje (v) que puede moverse hacia arriba y abajo, y esta limitado por topes. Dentro de la cubierta (A) se encuentra el resorte (G) que presiona sobre la cubierta y sobre el buje. La parte inferior de la cubierta dispone de los cuernos o brazos (L) que soportan en un extremo la masa (W) y en el otro una rueda que presiona el buje deslizable. Este tipo de regulador es usado en el sistema de hélice de paso variable.
1
2 1
2
Carga Máquina
Regulador
Figura 2

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 4 de29
Los reguladores axiales pueden ser centrífugos, en los cuales la fuerza centrífuga juega el papel principal en la acción reguladora (Fig. 6), ó de inercia, en los que predomina el efecto inercial (Fig. 7).
Figura 3. Regulador tipo Watt Figura 4. Regulador tipo Porter Figura 5. Regulador tipo Hartnell
Figura 6 Figura 7

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 5 de29
2.-Reguladores a fuerza centrífuga. Este tipo de reguladores es él más antiguo y el original usado por Watt en sus máquinas, fue usado mucho en las máquinas de vapor de poca velocidad y luego, tras posteriores modificaciones, en motores a explosión y turbinas de vapor, y diferentes sistemas de control. En su forma más simple puede describirse como un dispositivo R (destinado a oponerse a eventuales perturbaciones de un movimiento de rotación uniforme), constituido esencialmente por dos brazos iguales OA y OB vinculados con una articulación en un punto fijo O de un eje rotatorio “a”.
Dicho eje, que se supone, vertical es solidario a un sistema rotante “S” (eje de la máquina que se desea regular), del cuál interesa mantener uniforme su movimiento.
Los brazos mencionados llevan en sus extremos dos masas iguales “m” y están vinculados con una articulación mediante dos brazos menores iguales a un cuello (ó buje) C, deslizable sobre el eje “a”. De esta manera, queda asegurado que en cada instante los dos brazos OA y OB forman con “a” un mismo ángulo denominado “”.
Este eje gira a un velocidad proporcional a la de la maquina “S” y los contrapesos “m”, al girar con el eje, tienden a separarse por acción de la fuerza centrífuga. Puede determinase en forma precisa la vinculación entre la variación de “” y la eventual irregularidad del movimiento de “S”, o sea se busca una expresión que relacione el ángulo “” con “” (ángulo que indica la rotación de “S”).
Se observa que el dispositivo R y el sistema rotante “S” constituyen en conjunto un sistema material de dos grados de libertad, ya que pueden asumirse como parámetros lagrangeanos el ángulo “” que fija la orientación de R (y también de S) alrededor de “a” y el ángulo “” que individualiza la configuración de R en su plano.
O
A m m
k
l
S
a
R
Figura 8

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 6 de29
Con esto podemos hallar las ecuaciones de movimiento del sistema, que nos permitirán obtener las soluciones del mismo.
La energía cinética del sistema completo tendrá la forma:
22
2
1
2
1
IIT (1)
donde I e I son funciones de .
Para un primer análisis, supongamos que la masa de los brazos es despreciable frente a la masa m de los contrapesos.
En tales hipótesis, si "Ia" es el momento de inercia de S respecto de a (momento de inercia del acople a la maquina), se tiene:
222 senlmII a (2)
22 lmI (3)
Energía potencial*: En cuanto al peso, este admite un potencial U que esta dado como el potencial de las dos masas, o sea:
cos12 lgmU ** (4)
En cuanto al as fuerzas activas Q y Q, nos limitamos a suponer que solo intervienen el peso y un momento respecto del eje de rotación (considerado como un eventual exceso de potencia sobre la resistencia) que coincide con Q. *(Sin considerar la acción del resorte ni las fuerzas de roce) **(Tomando como potencial cero la posición mas baja de las masas)
S
senl
m m
k
l
a U = 0
cos1l
Figura 9

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 7 de29
En base a estas hipótesis, se obtienen las ecuaciones de movimiento, a partir de las ecuaciones de Lagrange, considerando la energía disipativa y las fuerzas aplicadas:
j
j
d
jjj
E
q
U
q
T
q
T
dt
d
(5)
Sustituyendo para el sistema en estudio, queda:
QIdt
d
(6)
02
1 2
UI
Idt
d (7)
Así, reemplazando Io, Q, I y U por las expresiones correspondientes y resolviendo las
ecuaciones diferenciales podemos hallar las ecuaciones de movimiento del sistema, es decir (t) y (t). Pero estas ecuaciones tienen particular interés para el estudio de las pequeñas oscilaciones entorno
de un movimiento de rotación de régimen ( o
= constante, = o =constante). Es decir, se determinara el comportamiento de la vinculación entre la variación de y la eventual irregularidad del momento del eje S, expresadas como pequeños cambios en la velocidad. En otras palabras analizaremos la condición de estabilidad del sistema. Se dijo, que Q representa un momento respecto del eje de rotación. En un movimiento perturbado, a partir de un movimiento en régimen en el cual la inclinación de los brazos del regulador sobre la vertical tenga un valor constante , este momento tendrá siempre signo opuesto a la perturbación a partir de 0 (pues esta perturbación con respecto de 0, se trata de oponer al momento Q). Q puede tomarse entonces como una función de la diferencia - 0, que tiene un carácter elástico. En primera aproximación puede ponerse: Q = -·( - 0) (8) Con = constante de proporcionalidad positiva (similar a una constante de rigidez torsional).

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 8 de29
Desarrollando las ecuaciones (6) y (7), obtenemos:
QIsenlmIdt
d
02 cos22 (6´)
02cos22
2
senlgmsenlmIdt
d (7´)
Ecuaciones que son verificadas por la posición de equilibrio, en la cual se cumple: = 0 (8)
0
(9) Y además:
00cos senlgmlF
Pero:
2
02
senlmrmF
Entonces:
00
2
0 cos senlgmlsenlm
Quedando:
0
2
0cos
l
g (10)
Con: (sen0 0) y 0
Si suponemos que durante el funcionamiento normal de la maquina que se quiere regular, las variaciones inducidas por este (momento Q), provocan pequeñas perturbaciones sobre el regulador, las ecuaciones de las pequeñas oscilaciones en el entorno de esta solución ( = 0,
0
y 0
2
0cos
l
g), se obtienen poniendo = 0 + ,
0 , donde w y son
pequeñas variaciones.
= 0 +
0 0
20
2
0
2
2
0 l
F
m·g
l·cos0
l·sen0
Figura 10

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 9 de29
y de lo que se desprende:
000
1
00 coscoscos
sensensensensen
(11)
000
1
00 coscoscoscoscos
sensensen
(12)
Reemplazando en las ecuaciones (6´) y (7´) se obtiene: Para la (6´):
02 cos4
Isenlm
02
002
00000
0
02
cos2
coscos4
senlmIa
sensenwlm
Reemplazando las (11) y (12):
00
20
022
0022
0
0
0
002
02
02
0002
coscos22
coscoscos4
sensenlmIaw
sensensenwlm
cos22
22cos22
14
02
022
0002
senlmw
senlmwIawsenwlm
I
senlmIaw
wlmsenwlmlmsenlm
022
0
02
0
02
0
002
002
22
2cos4222cos422
022 0020
senlmwI (13)

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 10 de29
Para la (7´):
02cos222
22
senlgmsenlmlm
0coscoscos 00
2
0000
0
0
sengsensenll
0coscoscoscos 00
20
02
02
02
00
l
gsen
l
gsensensen
0cos22coscos 000
2
0000
l
gsen
l
gwsen
0cos
2cos2cos22coscos
00
0
000000
2
00
2
0
l
gsen
l
g
wsenwsen
0cos2coscos2 000
2
00
2
0000
senl
gsen
l
gsenw
Considerando la ecuación (10) obtenida de la condición de equilibrio:
0
2
0cos
l
g 00
000
2
0 coscos
cos
senl
gsen
l
gsen
000
2
0 cos senl
gsen
Quedando para la (7´):
02coscos2 000
2
0000
senl
gsen
l
g
l
gsenw
02coscos2 0
2
0000
l
gsenw (14)

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 11 de29
Obteniendo, entonces, el sistema de ecuaciones diferenciales:
022 0020
senlmwI (13)
02coscos2 0
2
0000
l
gsenw (14)
En donde 0
I es el valor de I para = 0.
Si asumimos como solución de este sistema, a funciones del tipo exponencial:
tzew 1
tze 2 Con 1, 2, z constantes, se obtiene la siguiente ecuación característica:
Para la (13):
0222 20022
1022
tztztz esenezlmezsenlmIa
Simplificando tze , dividiendo por 22 lm , y reagrupando, queda:
02
22 20020
221
lmsenzzsen
lm
Ia (15)
Para la (14):
02coscos2 20
2
00102
2 0
tztztz e
l
gseneez
Simplificando tze , y reagrupando, queda:
02coscos2 0
2
02
2001 0
l
gzsen
Despejando 1 :
00
0
2
02
2
1
2
2coscos 0
sen
l
gz
(16)

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 12 de29
Sustituyendo (16) en (15):
02
222
2coscos
200202
2
00
0
2
02
2 0
lmsenzzsen
lm
Ia
sen
l
gz
Simplificando 2 , y multiplicando por 00 2
sen :
02
222
2coscos200000
2
20
2
02
0
lmsenzsenzsen
lm
Ia
l
gz
Distribuyendo:
02
2
22
2coscos2
200
02
2
002
20
2
03
02
2 0
lmsen
senzzsenlm
Ia
l
gzsen
lm
Ia
Pero de la ecuación (10) tenemos que:
02
2
0 coscos 0
l
g
Entonces:
02
2
22
2coscos2
200
02
2
002
20
2
02
23
02
2 00
lmsen
senzzsenlm
Iazsen
lm
Ia
(17)
Además:
02
2
02
2
02
2
0
2
02
2
00000 coscos2coscos sen
02
2
0
2
02
2
000 2coscos sen

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 13 de29
y
02
02
02 cos42 sensen
Sustituyendo en la (17)queda:
02
2
cos422
200
02
02
2
002
202
03
02
2
lmsen
senzzsenlm
Iasenzsen
lm
Ia
(18)
Reagrupando:
022
cos422
0
2
0202
02
202
2
03
02
2
senlm
zsenlm
Iasenzsen
lm
Ia
022
1cos322 0
2
0202
202
2
03
02
2
senlm
zlm
Iasenzsen
lm
Ia (19)
La cual es una ecuación de tercer orden en z., a la cual se le puede aplicar el criterio de estabilidad* para polígonos de este tipo, que dice: Sea F(z) la ecuación característica de un sistema, tal que F(z)= A0·z
3+ A1·z2 + A2z + A3. Para que
el sistema sea estable se debe cumplir la siguiente condición: A1·A2 -A0·A3 > 0 Para nuestro caso se ve que A1 es cero, y que A0, A2 y A3, son siempre positivas, por lo que el sistema como esta planteado no cumple la condición de estabilidad. Esta condición teórica se verifica con la constatación experimental, que el regulador de Watt no cumple precisamente su objetivo, pues actúa muy rápidamente (por ejemplo)tanto al abrir como al cerrar alguna válvula de acceso, por lo que se recurre a dispositivos mas perfeccionados Por esto es necesario considerar el problema agregando la acción del resorte y de las fuerzas de roce. Si consideráramos solo el resorte, indicado en la figura 1 con la letra k, su acción en el funcionamiento del regulador no modifica esencialmente su comportamiento en cuanto a la estabilidad (sigue siendo inestable). En efecto, la energía potencial ahora es suma de dos partes: la debida a la fuerza de gravedad y la energía del resorte, o sea:
2
2
1cos12 klgmU (20)
*Ver apéndice de estabilidad.

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 14 de29
Operando con esta consideración, se obtendrán ecuaciones de movimiento, cuya ecuación característica tendrá una forma similar con la ecuación característica del caso anterior, la cuál no varia en relación a la estabilidad del sistema. Si consideramos tanto la acción del resorte como de la fuerza de roce (en la energía disipativa), tendremos:
22
2
1
2
1
IIT (21)
2
2
1cos12 klgmU (22)
2
2
1vcE (23)
Donde: es el desplazamiento que sufre el resorte,
y VA es la velocidad sobre la guía del resorte. Tomando el caso mas general, se tiene para el desplazamiento :
cos1cos1coscos rRrRrR (24) si consideramos (para simplificar el análisis), que:
R = r = , y que R + r = l (25) Se obtiene:
cos1cos12cos1cos1 lRrR (26)
Y para la velocidad VA: Por condición cinemática de rigidez:
90coscos VcVA
cos
90cos
VcVA (27)
Además:
senrsenR para todo y
sen
R
rar cos (28)
A
senlV
'
R
Vc
lV
VA
(90 - - )
r
A
C
Figura 11

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 15 de29
senR
rar
senR
rarR
senR
rar
senR
rarVc
VA
coscos
cos90cos
coscos
cos90cos
(29)
Tomando la misma consideración que en el caso del desplazamiento, se tiene:
cos
cos2
cos
2
cos
2902cos90cos
cos
290cos senRsenRsensenRRVA
senlsenRVA
2 (30)
Quedando las ecuaciones para la energía potencial disipativa:
22 cos12
1cos12 lklgmU (31)
22
2
2
1senlcEd
(32)
La ecuación de Lagrange en su forma completa es:
j
j
d
jjj
E
q
U
q
T
q
T
dt
d
(33)
De donde:
0U
y 0
dE, por lo que la ecuación (13)se mantiene igual.
senlksenlgmU
cos12 2 (34)
2222 senlcsenlcEd
* (35)
*Considerando pequeñas variaciones ( 0 )

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 16 de29
Agregando estas últimas a la ecuación (7’), se obtiene:
0
cos12cos22
22
22
22
senlc
senlksenlgmsenlmlm (36)
Sustituyendo con las pequeñas variaciones:
0coscoscos1
222coscos22
200
20000
2
0
2
000022
senlcsensenlk
senlgmsenlmlm (37)
Desarrollando y simplificando términos de segundo orden:
0coscos22
cos
coscoscoscos2
2cos222coscos
0
022
0002
0
002
02
02
0000
0
0
00000
2
000
2
0
sensenm
c
l
g
sensensensenm
k
senl
gsensen
Reagrupando y simplificando nuevamente:
0cos2
cos
2coscoscos12
22cos
0
0002
0
0000000
2
0
senm
csen
m
c
l
g
senm
ksen
(39)
02
cos
cos2cos2
cos12
22cos
02
0
0000000
2
0
senm
c
l
gm
ksen
m
ksen
(38)
(40)

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 17 de29
Sacando como factor común
, y :
0cos12
2cos2cos2
cos2cos2
00
0000
2
002
senm
k
senm
k
l
gsen
m
c
Sustituyendo 0cosl
g, por 0
22
0 cos
:
0cos12
2
cos2cos2
cos2cos2
0000
02
2
00
2
002
senm
ksen
m
ksen
m
c
(42)
Simplificando y reagrupando:
0cos12
2
cos2cos2
coscos2
0000
02
2
002
02
2
002
senm
ksen
m
ksensen
m
c
(43)
0cos12
2cos2cos22
00
0002
2
002
senm
k
senm
ksensen
m
c
(44)
Por simplicidad, escribamos la (13) y la (44) así:
0211
bba (45)
0
fedb (46)
(41)

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 18 de29
donde:
0
222
0
1 22 sen
lm
Ia
lm
Ia
001 2
senb
22 2 lm
b
02
2sen
m
cb
cos2cos20
22
0
m
ksend
00 2
sene
00 cos12
senm
kf
Tomando, para el sistema homogéneo (f = 0), soluciones del tipo:
tzew 1
tze 2 y reemplazando en la (45) y (46), se tiene:
022111 bzbza (47)
022
1 dzbze (48) La ecuación característica resultante es: 02
21221 dzbzzabzbe
02
121 dzbzzabzbe O sea: 032
21
30 AzAzAzA
Siendo: 10 aA
baA 11
112 bedaA
23 beA

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 19 de29
Está ecuación característica es de tercer grado con todos sus coeficientes positivos. La condición de estabilidad de la ecuación cúbica establece que: A1·A2 -A0·A3 > 0 Es decir:
21111 beabedaba 0 Esta condición supone que la cantidad b dependiente de la ficción, cumpla el requisito:
b 11
2
111
21
beda
be
bedaa
bea
, o sea
b
22
002
2
02
0
0
22cos2cos
22
2
lmsen
m
ksen
lm
I
sen
b
22200
22
00
0
2cos2cos2
2
senm
ksenI
sen (49)
Si no se satisface esta condición, el movimiento estacionario supuesto del regulador es inestable; una variación brusca en la carga de la máquina producirá oscilaciones en el regulador que no se amortiguarán gradualmente, y tendrá lugar el conocido fenómeno de penduleo del regulador. La solución particular de la ecuación diferencial no aporta al estudio de la estabilidad del sistema mas que la ecuación (49) por lo que no hace falta desarrollarla. 3.-Reguladores en sistemas de hélices de paso variable.- Regulador tipo Hartnell. Pag.
Ver apéndice B. Regulador tipo Hartnell 4.-Reguladores axiales.
4.1- Regulador a péndulo.
Consideremos el regulador cuyo esquema está indicado el la figura 12, donde un disco circular gira alrededor de su eje vertical cuya traza es “O”.

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 20 de29
En un punto “A” del disco, situado a una distancia “r” del eje de rotación, se agrega un péndulo de longitud “l” y masa “m”.
Si se supone que el péndulo está apoyado sobre una superficie horizontal pulida, de manera que el movimiento del sistema esté confinado al plano horizontal del disco; no se necesitará considerar los efectos de la fricción, ni los de la gravedad.
Estudio cinemático general. Deseamos determinar la velocidad y aceleración del punto “G”, centro de gravedad de la masa“m”. La velocidad total de la masa “m” que se indica como VG es igual a la suma geométrica (ó
vectorial) de la velocidad que tiene en su movimiento con el disco (al acompañarlo), la que se denomina V (velocidad de arrastre), y su velocidad respecto del mismo Vr (velocidad relativa), o sea:
VrVVG
Para este caso:
OGV AGVr Cuyos módulos son:
sVV
llVrVr
Luego del triangulo de velocidades se obtiene:
cos2cos22
2222
2222lslslslsVG
A
r
O
C m
s k
I
l
E
a
G
Figura 12
w
w
A
r
O
m
s
l
G
Figura 13
Vr
V
GV
-( - )
C k
E

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 21 de29
Sustituyendo “s” ( OGs ) y cos por funciones de :
cos2222 rlrls
cos2222 lslsr ls
lsr
2
cos222
Desarrollando cos en serie de potencias, y tomando los dos primeros terminos (los mas relevantes considerando pequeñas variaciones:
21cos
2 2222 2 rlrlrls
222 rlrls Queda:
ls
lrlrlrlr
ls
lsr
2
2
2cos
22222222
ls
rll
2
22cos
22
Sustituyendo en VG:
ls
rlllsrlrllVG
2
222
22222
222
222222
2222
rllrlrllVG
Considerando una variación de w: dw =
222
222
2222
rllrlrllVG
En cuanto a la aceleración de la masa “m”, o sea aG, se tiene:
CrG aaaa
donde:
AGAGar
2 aceleración relativa
OGOGa
2 aceleración de arrastre
AGAGVra 222 aceleración de Coriolis

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 22 de29
Conocido el valor de aG, pueden obtenerse las fuerzas de inercia:
GamFi
Estudio dinámico del regulador: Se estudiará en este apartado las características dinámicas de este regulador. Suponiendo en un primer momento, un movimiento estacionario estable del sistema, en el que el péndulo toma una dirección radial mientras el disco gira a una velocidad uniforme w. Ahora, si una pequeña perturbación cualquiera provoca un pequeño desplazamiento del péndulo de la posición inicial, dará por resultado pequeñas oscilaciones del péndulo y pequeñas fluctuaciones en la velocidad angular del disco. Para el estudio de estas oscilaciones se hará uso de las ecuaciones de Lagrange, siendo el pequeño ángulo de oscilación del péndulo y llamando con
las pequeñas fluctuaciones en la velocidad angular del disco. En estas condiciones la energía cinética vale:
22
2
1
2
1GVmIT
2222
2
1
2
1 akAEkU
La expresión de Lagrange, en su forma completa es:
j
j
d
jjj
E
q
U
q
T
q
T
dt
d
Que aplicándola para qj =, da:
2222 222
1
rllmwrlrlmwIT
2222 222
1
rllmwrlmwrlmIT
-( - ) w
A
r
O
m
s
l
G
Figura 14
Vr
V
GV
C k
E
I

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 23 de29
0
2
22
00
22 222
12
rlm
rllmwrlmrlmrlmIT
t
0
2
22222
2
1
22
1
rlm
rlmlmrlmIrlmlmrlmIT
lrlmrlmIT 2
Y además:
0T
0U
0
dE
0Q
Por lo que:
02
lrlmrlmIEUTT
dt
d d
Aplicando ahora, la expresión de Lagrange, para qj =
, da:
222 222
1
rllmlmT

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 24 de29
0
222
2
1
mrlmlmlmT
lrlmlmT 2
lrlmlm
T
t2
rlmrlmT
2
00
22 2
rlmrlmrlmT
0
2
0
2 2
rlmrlmrlmT
2
rlmT
Además:
2akU
0
dE
0Q

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 25 de29
Por lo que:
0222
akrlmlrlmlmEUTT
dt
d d
0
2
22
lm
ak
l
r
l
lr
0
2
22
lm
ak
l
r
l
lr
Quedando el sistema:
02
lrlmrlmI
0
2
22
lm
ak
l
r
l
lr
Llamando 20 rlmII y eliminando
de las ecuaciones, resulta:
0I
lrlm
0
2
22
0
lm
ak
l
r
I
lrlm
l
lr
012
22
0
2
lm
ak
l
r
I
lrm
02
22
0
20
lm
ak
l
r
I
lrmI
02
22
0
22
lm
ak
l
r
I
lrmlrmI
02
22
0
lm
ak
l
r
I
I

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 26 de29
Esto indica que el péndulo giratorio oscila armónicamente con una pulsación:
2
2202
lm
ak
l
r
I
Ip
que resulta función de la velocidad de rotación estacionaria del disco () y de la frecuencia natural del sistema péndulo-resorte. 4.2- Regulador a volante.
Dos brazos pesados H y H’ están articulados en los extremos de un disco L que rota alrededor de su eje O Los dos brazos están vinculados por un resorte de constante k, y sus ejes forman ángulos iguales con respecto de la línea de los centros de articulación BB’.
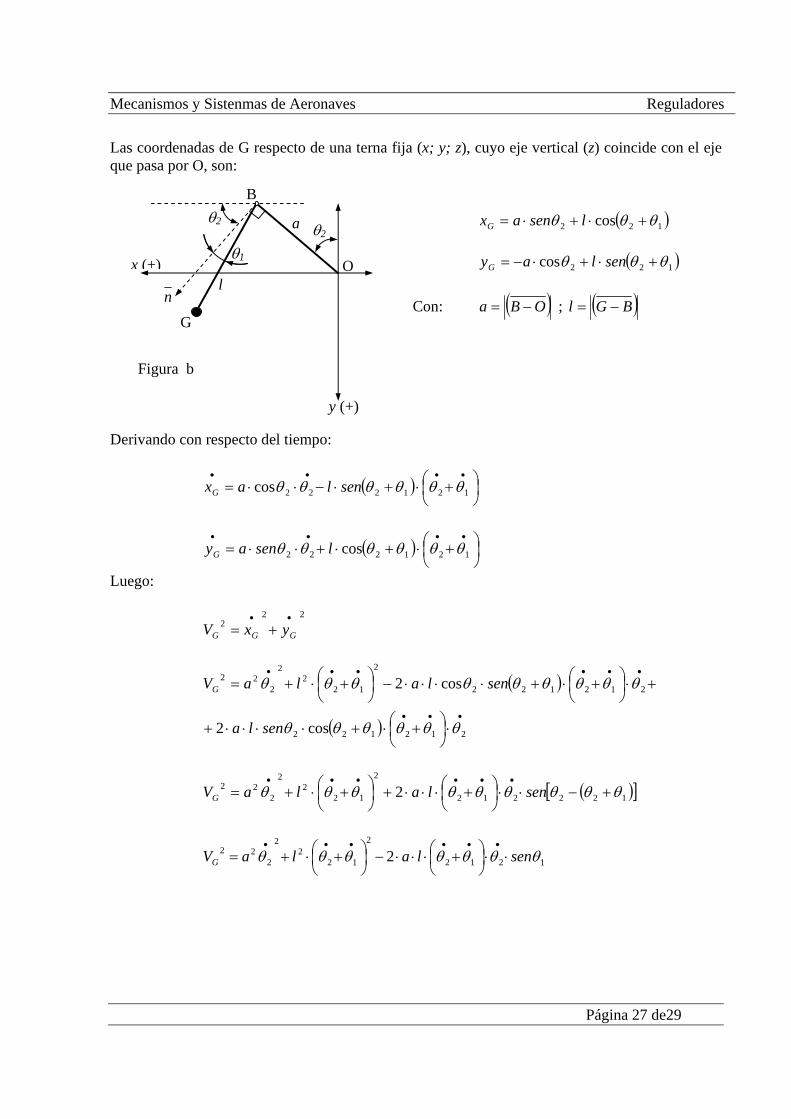
Es evidente, dado la simetría, que el sistema posee dos grados de libertad. Por simplicidad se toma como coordenadas Lagrangeanas los ángulos 1 (inclinación de los brazos H y H’ respecto de la normal a BB’) y 2 (ángulo de orientación de los puntos B y B’ con respecto a una terna fija) La energía cinética del disco es:
2
22
1
dd IT
Id = momento de inercia del disco. Y la energía cinética de cada brazo es:
2
212
2
1
2
1
bGbb IVmT
pues el movimiento de H (ó H’) respecto de su centro de gravedad G (ó G’), es la rotación alrededor de la recta que pasa por G (ó G’) paralela a la dirección común del eje del disco y a la del eje de la articulación en B (ó B). Por otra parte, en la figura b, se a dibujado la posición de uno de los brazos (el izquierdo) para un instante genérico del movimiento del disco.
L
B
B’
H’
H O
k
G’
G
E’
E (/2 - 1)
1
1
2
Figura 15.a
Mecanismos y Sistenmas de Aeronaves Reguladores
Página 27 de29
Las coordenadas de G respecto de una terna fija (x; y; z), cuyo eje vertical (z) coincide con el eje que pasa por O, son:
122 cos lsenaxG
122cos senlayG
Con: OBa ; BGl
Derivando con respecto del tiempo:
121222cos senlaxG
121222 cos lsenayG
Luego:
22
2
GGG yxV
212122
212122
2
122
2
222
cos2
cos2
senla
senlalaVG
122212
2
122
2
222 2
senlalaVG
1212
2
122
2
222 2 senlalaVG
x (+)
y (+)
B
O
n l
G
2 2
1
Figura b
a

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 28 de29
Quedando entonces, la energía cinética total del sistema:
2
212
2
22
12
bGbdbd IVmITTT
2
211212
2
122
2
22
2
2 22
1
bbbbd IsenlamlmamIT
2112
21
22
2122
22
22
1
senmlalmI
lmIsenmlalmamIIT
bbb
bbbbbbd
2112
2
2222
111 22
1 aaaT
Siendo: 2
11 22 lmIa bb
122
22 22 senlalamIIa bbd
senmlalmIa bbb 22 212
Ahora, en la hipótesis de que los brazos pesados están obligados a moverse sobre el plano del disco y están libres de fricción, la energía potencial se reduce a la energía elástica, y la energía disipada es cero, por lo que:
2'2
1EEkU 0dE
Siendo E y 'E , los desplazamientos de los puntos de anclaje E, E’ del resorte.
Si se indica con EBh , resulta hlEB '' .
Luego: 1 hE 1' hlE 111' lhlhEE Por lo que queda:
21
22
2
1'
2
1 lkkU EE

Mecanismos y Sistenmas de Aeronaves Reguladores
Página 29 de29
Aplicando las ecuaciones de Lagrange, se obtiene:
02 12
212111
lkaa
0112222
aa Resolviendo estas ecuaciones, se puede obtener el estado dinámico del regulador.