datos generales del documento...subestaciones (sas), del departamento de diseño de subestaciones,...
TRANSCRIPT

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
1
Datos generales del documento:
Nombre de la Guía: Guía de conceptos, características y funciones de los sistemas de
automatización de subestaciones y sus componentes.
Código: G.01.PV.02.03
Macro proceso: PV02. Expansión de la infraestructura eléctrica
Proceso: PV02.03. Planificación y diseño de obras de infraestructura eléctrica
Subproceso PV02.03.S02 Estudios detallados y diseño de obras de infraestructura
Versión: 1.0
Control de aprobaciones:

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
2
Tabla de Contenido
1. Objetivo .............................................................................................................................. 6
2. Alcance ............................................................................................................................... 6
3. Dirigido a ............................................................................................................................ 6
4. Requerimientos y responsabilidades ....................................................................... 6
4.1. Conocimientos mínimos ...................................................................................... 6
4.2. Requerimientos tecnológicos ............................................................................ 7
4.3. Responsabilidades ................................................................................................. 7
5. Convenciones a utilizar ................................................................................................ 7
6. Desarrollo de la guía de conceptos, componentes y funciones de los
sistemas de automatización de subestaciones (SAS) ............................................. 11
6.1. Introducción a los sistemas de automatización de subestaciones .. 11
6.2. Descripción de los componentes principales de los sistemas SAS . 13
6.3. Descripción general ............................................................................................ 15
6.3.1. Redundancia y sincronización de tiempo ............................................................ 16
6.3.2. Confiabilidad y disponibilidad del SAS ................................................................ 17
6.3.3. Estructura de datos y servicios IEC 61850 ........................................................... 20
6.3.3.1. Modelos de datos conforme al estándar IEC 61850 ........................... 20
6.3.3.2. Servicios de comunicación conforme al estándar IEC 61850 ........... 22
6.4. Arquitectura básica del sistema de control .............................................. 23
6.4.1. Nivel 0 – nivel de proceso ................................................................................... 24
6.4.2. Nivel 1 – nivel de bahía ....................................................................................... 25
6.4.3. Nivel 2 – Nivel de estación .................................................................................. 26
6.4.4. Nivel 3 – centros de control ................................................................................ 27
6.4.5. Modos de control ................................................................................................ 28
6.4.5.1. Comando local .......................................................................................... 28
6.4.5.2. Comando remoto ...................................................................................... 30
6.4.5.3. Interconexión con los centros de control: CENACE Y COT .............. 30
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
3
6.5. Equipos componentes del SAS ........................................................................ 31
6.5.1. Equipos de nivel 0 ............................................................................................... 31
6.5.1.1. Unidades de control de aparamenta (SCU) o merging units digitales
31
6.5.1.2. Merging units analógicas (MU) ............................................................... 32
6.5.1.3. Equipos de monitoreo de transformador ............................................... 32
6.5.2. Equipos y sistemas de nivel 1 .............................................................................. 32
6.5.2.1. Unidades de control de bahía (BCU) ..................................................... 32
6.5.2.2. IEDs de protección ................................................................................... 33
6.5.2.3. Unidad de control para servicios auxiliares .......................................... 34
6.5.3. Elementos de interfaz entre niveles 1 y 2 ........................................................... 34
6.5.3.1. Cables con fibra óptica ............................................................................ 34
6.5.3.2. Distribuidores de fibra óptica (ODF) ...................................................... 35
6.5.3.3. Switches de comunicación red SAS ...................................................... 35
6.5.4. Equipos y sistemas de nivel 2 .............................................................................. 36
6.5.4.1. Sistema de sincronización de tiempo por satélite (GPS) ................... 36
6.5.4.2. Unidades de adquisición y control de la subestación ......................... 36
6.5.4.3. IHM del sistema de supervisión y control ............................................. 36
6.5.4.4. Gateways de comunicaciones ................................................................ 38
6.5.4.5. Computador de gestión de mantenimiento ........................................... 38
6.6. Características generales de los tableros para el SAS ......................... 39
6.6.1. Tablero de controlador de subestación .............................................................. 39
6.6.2. Tableros de protección y control de línea ........................................................... 39
6.6.2.1. Protección de líneas de transmisión ...................................................... 40
6.6.3. Tableros de protección, control y medición de
transformadores/autotransformadores ............................................................................. 42

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
4
6.6.3.1. Protección de transformador/autotransformador ................................. 42
6.6.4. Tablero de protección y control del reactor de barras ....................................... 43
6.6.4.1. Protección del reactor de barras ............................................................ 44
6.6.5. Tablero de protección y control del reactor de línea .......................................... 45
6.6.5.1. Protección del reactor de línea y reactores de neutro ........................ 46
6.6.6. Tablero de protección y control de banco de capacitores .................................. 47
6.6.6.1. Protección de banco de capacitores ..................................................... 47
6.6.7. Tablero de protección y control de bahía acoplador de barras .......................... 48
6.6.7.1. Protección de acople de barras .............................................................. 49
6.6.8. Protección diferencial de barras ......................................................................... 49
6.7. Sistema de medición de energía .................................................................... 50
6.7.1. Características técnicas ....................................................................................... 50
6.7.2. Parámetros y requisitos técnicos ........................................................................ 51
6.7.3. Comunicaciones y aspectos de diseño ................................................................ 51
6.8. Registrador digital de fallas (DFRs) .............................................................. 52
6.8.1. Características generales ..................................................................................... 53
6.8.2. Características de hardware y software .............................................................. 54
6.8.3. Registros mínimos ............................................................................................... 55
7. Referencias ..................................................................................................................... 56
8. Anexos .............................................................................................................................. 60
9. Historial de cambios .................................................................................................... 60
Anexo 1: Arquitectura del sistema de control de una subestación 230/138
kV 61
Anexo 2: Diagramas de principio subestaciones 230/138 kV .......................... 61

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
5
Índice de Figuras
Figura 1 Arquitectura IEC 61850: bus de proceso y estación .................................................. 16
Figura 2 Esquema conceptual del protocolo de redundancia PRP .......................................... 17
Figura 3 Modelamiento de datos (IEC 61850) ........................................................................ 21
Figura 4 Representación de componentes de la subestación en nodos lógicos ...................... 22
Figura 5 Servicios de comunicación IEC61850 ....................................................................... 23
Figura 6 Niveles de control de la subestación ......................................................................... 24
Figura 7 Modelo de interfaces de comunicación definidas en el estándar IEC61850 ............... 26
Figura 8 Arquitectura conceptual de un SAS conforme a la IEC 61850 edición 2 ..................... 28
Figura 9 Arquitectura conceptual del sistema de DFRs............................................................ 54
Índices de Tablas
Tabla 1 Requerimientos en tiempo de recuperación ............................................................... 20
Tabla 2 Funciones de protección de línea descritas conforme a la norma ANSI ..................... 41
Tabla 3 Funciones de protección de transformador descritas conforme a la norma ANSI ....... 43
Tabla 4 Funciones de protección de reactor descritas conforme a la Norma ANSI .................. 45
Tabla 5 Funciones de protección de reactor descritas conforme a la norma ANSI .................. 46
Tabla 6 Funciones de protección de banco de capacitores conforme a la norma ANSI ........... 48
Tabla 7 Funciones de protección de acople de barras descritas conforme a la norma ANSI ... 49
Tabla 8 Función de protección diferencial de barras descritas conforme a la norma ANSI ....... 50

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
6
1. Objetivo
Describir lineamientos y conceptos que caracterizan a los sistemas de automatización de
subestaciones (SAS) en instalaciones de transmisión de energía eléctrica de CELEC EP
TRANSELECTRIC, y que deben ser considerados en el diseño, montaje, pruebas y puesta en
servicio de los sistemas SAS, para así garantizar la confiabilidad de la subestaciones y reducir
su tiempo de indisponibilidad.
2. Alcance
Esta guía se aplica para la descripción de conceptos y las características fundamentales de los
sistemas SAS, de sus elementos y equipos componentes más importantes.
Describe la funcionalidad básica de los dispositivos y equipos que conforman el SAS y sus
principales características conforme al estándar IEC 61850. Estos elementos corresponden a los
requeridos para los niveles 0 (proceso), 1 (bahía de la subestación) y 2 (estación) del SAS, y
para la interacción con el nivel 3 (centro de control).
Adicionalmente se aplica para la elaboración de los términos de referencia para la
implementación de los sistemas de automatización de subestaciones (SAS) para ampliaciones,
nuevas subestaciones, y modernización o mejora de subestaciones existentes de CELEC EP
TRANSELECTRIC
3. Dirigido a
Esta guía está dirigida para especialistas en diseño de sistemas de automatización de
subestaciones (SAS), del departamento de diseño de subestaciones, asignados para elaborar
las especificaciones técnicas para el suministro, pruebas de aceptación en fábrica y sitio (FAT y
SAT por sus siglas en inglés) y puesta en servicio de ampliaciones, nuevas subestaciones, o
modernización de subestaciones de CELEC EP TRANSELECTRIC.
4. Requerimientos y responsabilidades
4.1. Conocimientos mínimos
Los especialistas en diseño de sistemas de automatización de subestaciones (SAS) deberán
tener los siguientes conocimientos mínimos:

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
7
- Sistemas de automatización de subestaciones, para supervisión y control
- Equipos de protección, medición y control de sistemas eléctricos de potencia.
- Esquemas de interoperabilidad entre equipos componentes.
4.2. Requerimientos tecnológicos
No aplica
4.3. Responsabilidades
Cargo Responsabilidad
Jefe del departamento de
diseño de subestaciones
Elaborar y/o actualizar la guía de acuerdo con los
lineamientos establecidos en la Corporación.
Asegurar el cumplimiento de la guía. Debe supervisar que la
guía se cumpla; coordinar que la misma sea revisada,
aprobada, difundida y que la documentación generada conste
en la estructura documental del IFS.
Subgerente de proyectos de
expansión
Revisar que la documentación que se genera en la guía
cumpla con los lineamientos establecidos en la
Corporación.Aprobar las actualizaciones que se
realicen, autorizar su difusión e informar al Gerente de
la Unidad de Negocio CELEC EP TRANSELECTRIC de
estas aprobaciones.
Subgerente de gestión
organizacional
Revisar que la guía y sus actualizaciones cumplan con
los lineamientos establecidos en la Corporación.
Gerente de la unidad de
negocio CELEC EP
TRANSELECTRIC
Aprobar la guía y autorizar su difusión
5. Convenciones a utilizar

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
8
Término Definición
ACSI Abstract communication service interface – servicio de interfaces de
comunicación abstracta (IEC 61850-7-2)
AIS Air insulated switchgear – subestación aislada en aire
ANSI American National Standard Institute – Instituto Nacional Estadounidense de
Estándares
ARCONEL Agencia de Regulación y Control de Electricidad
BCU Bay control unit – unidad de control de bahía
CENACE Operador Nacional de Electricidad
CID Configured IED description - archivo de descripción del IED configurado,
correspondiente a un solo IED, contiene una sección de direccionamiento de
comunicación (IEC 61850-6)
Comtrade Formato de archivo para almacenar oscilografías y de datos relacionados con
alteraciones transitorias del sistema de potencia.
COT Centro de Operaciones de Transmisión
DANH Doubly attached bridging nodes – interfaz de nodo doble para protocolo HSR
DANP Dual attached nodes – interfaz de nodo doble para protocolo PRP
DCP Divisor capacitivo de potencial
DDE Dynamic data exchange – intercambio dinámico de datos
DFR Digital fault recorder – registrador digital de fallas. Es un dispositivo electrónico
inteligente, con la capacidad de generar registros en forma de oscilografías
ante eventos ocurridos antes, durante y después de cualquier perturbación
o falla, así como cualquier cambio que ocurra en el sistema y haya sido
detectado por los circuitos de arranque del DFR.
DNP Distributed network protocol – protocolo de red distribuido
EMC Electromagnetic compatibility – compatibilidad electromagnética
FACTS Flexible AC transmission systems – sistemas de transmisión flexible AC
FAT Pruebas de aceptación en fábrica realizadas en las instalaciones del fabricante.
Gateway Denominado puerta de enlace. En un dispositivo que permite interconectar
equipos con protocolos y arquitecturas de red diferentes.
GIS Gas insulated switchgear – subestación aislada en gas
GOOSE Servicio de intercambio de datos organizados en paquetes (data set) entre
equipos de la red IEC61850.
GPS Global positioning system – sistema de posicionamiento global

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
9
Término Definición
HSR High-availability seamless redundancy - alta disponibilidad de redundancia
transparente
ICD IED capability description - archivo de descripción de la capacidad de un IED,
denota su estructura física, una sección de comunicación y otra de la
subestación (IEC 61850-6)
IEC International Electrotechnical Commission – Comisión Electrotécnica
Internacional
IED Dispositivo electrónico inteligente, que contiene procesadores con la capacidad
de recibir y enviar información desde o hacia una fuente externa, como
controladores de bahía, relés de protección, relés concentradores de señales,
registradores de fallas.
IEEE Institute of Electrical and Electronic Engineers – Instituto de Ingenieros Eléctricos
y Electrónicos
IHM Interfaz humano máquina
LAN Local area network – red de área local
LTC Load tap changer – cambiador de taps bajo carga
MMS Manufacturing message specificaction - especificación de mensajes de
fabricación (IEC 61850)
MTTF Mean time to failure – tiempo medio de falla
MTTR Mean time to repair – tiempo medio de recuperación
MU Merging units (IEC 61850-9-2)
ODBC Open database conectivity – conectividad abierta de bases de datos
OLE DB Object linking and embedding for databases – enlace e incrustación de objetos
para bases de datos
PCM Protección, control y medida
PDC Phasor data concentrator - concentrador de datos fasoriales
PMU Phasor measurement unit - unidad de medición fasorial
Protocolo Es un conjunto de reglas desarrollado dentro de un estándar, que definen la
sintaxis, semántica y sincronización en la comunicación para el intercambio de
información.
PRP Parallel redundancy protocol – protocolo de redundancia en paralelo
PTP Precision time protocol – protocolo de precisión de tiempo
PUAS Power utility automation systems – sistema de automatización para empresas
eléctricas

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
10
Término Definición
Red Box Redundancy box – equipo de gestión de protocolos redundantes para nodos
simples (SAN)
Redundancia La redundancia en sistemas de control permite la alta disponibilidad y capacidad
de autorecuperación. Se consideran elementos adicionales a los mínimos
necesarios para garantizar el funcionamiento si uno de sus componentes falla.
Router Son los encargados de la comunicación entre equipos en distintas redes
ethernet.
SAN Single attached nodes – interfaz de nodo simple
SAS Sistema de automatización de subestaciones
SAT Las pruebas de aceptación en sitio se realizan en la subestación, con los equipos
ubicados en su destino final.
SCADA Supervisory control and data acquisition – supervisión, control y adquisición de
datos
SCD Substation configuration description – archivo con la descripción de
configuración de subestación, contiene una sección de subestación,
comunicación, IEDs y una de plantilla de tipos de datos. (IEC 61850-6)
SCL Substation configuration language – lenguaje de configuración de la subestación
(IEC 61850-6)
SCSM Specific communication service mapping – Servicios de comunicación
específicos de mapeo (IEC 81850-8-1/IEC 61850-9-2)
SNTP Simple network time protocol – protocolo simple de tiempo de red
SOE Registro secuencial de eventos con indicación de estampa de tiempo
Switch Encargados de la comunicación de equipos dentro de una misma red ethernet.
Switchgear Aparamenta eléctrica (interruptor de potencia y seccionadores)
TCs Transformadores de corriente – corriente para medición y protección
TPs Transformadores de potencial – voltaje para medición y protección
VDAN Virtual doubly attached node – nodo virtual doble
WAMS Wide area measurement systems - sistema de monitoreo de área extendida
XML Extensible markup language – lenguaje de marcado extensible (IEC 61850)

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
11
6. Desarrollo de la guía de conceptos, componentes y funciones
de los sistemas de automatización de subestaciones (SAS)
6.1. Introducción a los sistemas de automatización de
subestaciones
Una subestación eléctrica se constituye de un conjunto de equipos que permiten el transporte y
entrega de energía desde las centrales de generación hacia los centros de consumo, es decir
los distribuidores. Las subestaciones están unidas entre sí mediante líneas de transmisión.
Dependiendo del tipo de aislamiento, se tienen dos tipos de subestaciones: aisladas en aire (AIS:
air insulated switchgear) y aisladas en gas (GIS: gas insulated switchgear).
Los elementos que constituyen una subestación de energía eléctrica son:
Sistema de “barras” por cada nivel de voltaje. En CELEC EP. se tienen los siguientes
esquemas de barras:
- Barra simple
- Barra principal y transferencia
- Doble barra sin by-pass
- Doble barra con by-pass
- Barra en anillo
Posiciones de bahías que se conectan a una barra, para unir eléctricamente los diferentes
equipos de una subestación entre sí, y con las líneas de transmisión. Se puede tener los
siguientes tipos de bahías:
- Línea
- Transformador
- Reactor
- Capacitor
- Bahía de transferencia (en el esquema de barra principal y transferencia)
- Bahía de acople (en el esquema de doble barra con/sin by-pass)
Las bahías se componen de varios seccionadores y un interruptor que permiten la conexión y
desconexión entre la barra y el equipo al cual está asociada la bahía (línea, transformador,
reactor o banco de capacitores). Se utiliza transformadores de corriente (TCs) y transformadores
de potencial (TPs) para la medición de corrientes y voltajes, respectivamente. Eventualmente,
puede incluir uno o varios seccionadores de puesta a tierra, dependiendo del tipo de bahía.
Además de los elementos mencionados en el apartado anterior, la subestación se compone de
los siguientes sistemas:

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
12
Sistema de control y protecciones “SAS” (substation automation system – sistemas de
automatización de subestaciones).
Sistema de servicios auxiliares de 125 Vdc y 208 Vac.
Los sistemas de automatización de subestaciones (SAS) permiten la supervisión y monitoreo en
tiempo real de los componentes de la subestación, y de sí mismo, es decir cuenta con una
autosupervisión, además del control en modo local y remoto de todos los equipos de la
subestación.
Los componentes fundamentales que conforman el sistema de automatización de subestaciones
(SAS) son:
Protecciones principal y redundante.
Unidades de control de aparamenta (switchgear control unit – SCU).
IEDs de control o unidades de control de bahía (bay control unit - BCU).
Registradores digitales de fallas (digital fault recorder – DFR).
Unidades de medición fasorial (phasor measurement unit - PMU).
Sistema de control de la subestación que adquiere los datos de los IEDs
- Equipos redundantes de adquisición de datos.
- Estación de trabajo para el operador de la subestación con IHMs redundantes.
- Gateways redundantes para envío de datos a los centros de control del COT y CENACE.
- Sistema de sincronización de tiempo (GPS).
- Red de área local LAN conformada por un bus de proceso y un bus de estación.
Computadoras de gestión de IEDs de control, protecciones y DFRs (registradores de fallas).
La implementación del sistema SAS en una subestación contempla el diseño básico (funcional o
de principio) y detallado, fabricación, inspección, configuración, programación, pruebas en
fábrica (FAT), transporte hasta el sitio, instalación, pruebas en sitio (SAT) y puesta en marcha.
Entre la documentación descriptiva del sistema, se tiene:
Ingeniería básica: diagrama unifilar de protección, control y medición (PCM); diagramas
lógicos o de principio.
Ingeniería de detalle: arquitectura del SAS; planos desarrollados de tableros PCM, tableros
de equipos de patio: tableros o cajas de agrupamiento de circuitos de corrientes y voltajes.
Planos as-built.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
13
6.2. Descripción de los componentes principales de los sistemas
SAS
Los componentes fundamentales que conforman los Sistemas de Automatización de
Subestaciones (SAS) son:
Las protecciones: conformadas por dispositivos electrónicos inteligentes basados en
microprocesadores (IEDs), que en base a un muestreo de voltajes y corrientes detectan fallas
en los equipos de la subestación o en las líneas de transmisión y aíslan estas fallas mediante
el disparo (apertura) de los interruptores.
Las unidades de control de aparamenta (switchgear control unit – SCU): o merging units
digitales son concentradores de señales binarias cableadas eléctricamente al IED, que las
convierte en señales digitalizadas, enviadas por mensajes GOOSE (establecidos en la norma
IEC 61850) a través de fibra óptica, es decir son una interfaz entre los equipos de patio y el
sistema de control (IEDs de control y protecciones, IHM, gateway). Estos conversores
cuentan con entradas binarias que adquieren el estado de seccionadores, interruptores,
alarmas en cajas de agrupamiento de TCs y TPs, y salidas binarias que permiten comandar
la apertura y cierre de equipos de corte y seccionamiento, además del cambio de LTC en
transformadores, entre otras maniobras. Conforme a la concepción de los diseños se puede
implementar el uso de merging units analógicas que concentren la adquisición de señales de
voltajes y corrientes en cada una de las bahías.
IEDs de control o unidad de control de bahía (bay control unit – BCU): que permiten la
apertura y cierre de los seccionadores o interruptores, cambio de tap en los LTCs de
transformadores, entre otras maniobras, mediante lógicas programadas. Además, mediante
muestras de voltaje y corriente, calculan las medidas eléctricas que sean necesarias: P. Q,
f, etc. Normalmente los BCUs utilizan medidas de V, I con precisión clase 0.5, mientras que
los IEDs de protecciones tienen una precisión 5P20.
Para cada bahía, se tiene un tablero con dos IEDs de protección (redundancia) y un BCU.
Registradores digitales de fallas (digital fault recorder – DFR): que registran voltajes y
corrientes adquiridos por los IEDs de protecciones y las señales de arranques y disparos
generados por las funciones de protección. Los DFR constituyen una auditoría para la
operación de los IEDs de protección.
Unidad de medición fasorial (phasor measurement unit - PMU): Son medidores de amplitud
y ángulo de fase de voltajes y corrientes, que envían las medidas adquiridas a un
concentrador PDC local o del sistema WAMS instalado en el CENACE. Son parte de una
protección sistémica, es decir protegen todo o parte del Sistema Nacional Interconectado
(SNI), incluyendo generación, transmisión y distribución. La Regulación No. ARCONEL –

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
14
003/16 dispone que CENACE en base a un estudio técnico entregado a la ARCONEL,
determinará donde requiere la instalación de PMUs, considerando los siguientes criterios:
- Líneas de transmisión que transportan importantes cantidades de energía
- Cargas variables dinámicas de gran magnitud
- Zonas del sistema de potencia que permitan la toma de acciones de control de área
extendida WAMS
- Subestaciones que cuenten con dispositivos FACTS.
Sistema de control de la subestación: que adquiere los datos de los IEDs y los presenta
localmente al operador de la subestación (IHM). Estos datos se envían también a los centros
de control del COT y CENACE (gateway). Dependiendo de la arquitectura del sistema de
control se puede tener:
- Tableros de acero inoxidable instalados a la intemperie en el patio de maniobras, junto a
cada bahía, que contienen dos SCU redundantes. Estos IEDs deben tener entradas
binarias (BI) y salidas binarias (BO) suficientes para la adquisición y envío de señales a
varios equipos en patio.
- Tablero de protecciones, control y medición con dos IEDs de protección redundantes, un
BCU y un medidor multifuncional con capacidad de medición de calidad de energía.
Se requiere medidores principalmente en bahías de transformador, en el lado secundario
y lado terciario.
- Un tablero con dos equipos de adquisición redundantes (computadores con sistema
operativo Windows o Linux, o RTUs con sistemas operativos de tiempo real).
- Un tablero con dos gateways redundantes (computadores con sistema operativo
Windows o Linux, o RTUs con sistemas operativos de tiempo real)
- Una estación de trabajo con dos IHMs redundantes para el operador de la subestación.
- Una red ethernet LAN que enlaza a los IEDs y equipos del sistema de control, con
características de sincronización del tiempo y redundancia recomendadas en la norma
IEC 61850 parte 5 y determinadas en las especificaciones técnicas.
- Sistema de sincronización de tiempo por GPS para el sincronismo de los componentes
del sistema SAS.
- Computadoras de gestión de los sistemas:
o IEDs del sistema SAS, controladores de subestación (BCUs) y protecciones
o Registradores digitales de fallas (DFR)
Los medidores de energía se conectarán a una red independiente al SAS, a través de un switch
instalado, uno por cada caseta, permitiendo el acceso local y remoto, para la obtención de datos
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
15
desde el Centro de Operación de Transmisión (COT). La red de medidores no requiere
redundancia.
6.3. Descripción general
El sistema de automatización de subestación (SAS), está constituido por un conjunto de equipos
y accesorios requeridos para funciones de supervisión y tareas de protección, control y medida,
a nivel local (subestación) y remoto (centros de control CENACE y COT). El SAS permite el
monitoreo en tiempo real de cada bahía en los distintos patios de la subestación.
Los equipos y la arquitectura del SAS son de tipo digital con un alto grado de modularidad, es
decir, distribuido física y funcionalmente para permitir una posterior ampliación del sistema. Las
expansiones pueden comprender la inclusión de funciones adicionales de control, protección y
supervisión, así como la adición de nuevos componentes físicos.
Las nuevas tecnologías desarrolladas tienden a disminuir la cantidad de cable de control
utilizado, sustituyéndola por el envío de señales digitalizadas a través de redes de comunicación.
Esta alternativa permitirá reducir la cantidad de cable de cobre y las dimensiones de
canalizaciones y tableros.
Todos los equipos deben estar diseñados para trabajar en ambientes de alta interferencia
electromagnética, sin afectación de ninguna de sus funciones. Adicional, todos los componentes
y redes de comunicación del sistema deben tener la facultad de autoarranque, una vez
energizados, o luego de una falla en el sistema de alimentación de corriente continua o alterna.
El SAS está integrado y configurado en redes locales LAN (local area network) que se enlazan a
los equipos con fibra óptica. Utiliza protocolos que se encuentran especificados en el estándar
IEC 61850 y cumplen con características dnteroperabilidad, redundancia de red y sincronización
de tiempo. Está constituido por un sistema digital tipo SCADA, con equipos servidores e IHM que
deben compartir la misma base de datos. Toda la información registrada en el SAS puede
enviarse hacia los centros de control a través de un gateway.
Como indica la figura 1, la arquitectura de red del SAS presenta dos tipos de buses de
comunicación, diferenciados por el protocolo utilizado:
Bus de estación: comprende los enlaces de comunicación entre el equipamiento a nivel de
estación (nivel 2), casetas de patio (nivel 1) y merging units digitales a nivel de proceso (nivel
0). Los protocolos de comunicación a utilizar en este bus se encuentran establecidos en la
norma IEC 61850-8-1 (MMS y GOOSE) en conformidad con la edición 2.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
16
Bus de proceso: comprende los enlaces de comunicación entre el equipamiento a nivel de
proceso: merging units análogas (nivel 0) y los equipos ubicados en caseta de patio: IEDs
(nivel 1). Los protocolos de comunicación a utilizar en el bus de proceso están establecidos
en la norma IEC 61850-9-2LE (sampled values o valores muestreados).
Figura 1 Arquitectura IEC 61850: bus de proceso y estación
Fuente: CELEC EP – TRANSELECTRIC. Manual de especificaciones técnicas para el
SAS MAN-DIS-03
6.3.1. Redundancia y sincronización de tiempo
El estándar IEC 61850 (edición 2) parte 5, indica los requerimientos de redundancia para las
redes de comunicación del SAS. Para cumplir estos requisitos se incluyen dos protocolos de
redundancia de alta disponibilidad, definidos en la norma IEC 62439-3, que son aplicables a
buses de estación y proceso de cualquier tamaño y topología. Estos protocolos son: redundancia
en paralelo (PRP) y alta disponibilidad de redundancia transparente (HSR).
CELEC EP TRANSELECTRIC en sus sistemas SAS utiliza redundancia RSTP (rapid spanning
tree protocol - IEC 62439-1 e IEEE 802.1w) y redundancia PRP (parallel redundancy protocol -
IEC 62439-3). Las reglas de configuración, cálculo y métodos de medición del tiempo de
recuperación deben ser determinísticos. Para implementar algún tipo de redundancia, se debe
considerar la capacidad de los IEDs para enlazarse bajo el protocolo de redundancia propuesto,
es decir, deben tener dos puertos nativos PRP/HSR de ser el caso.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
17
En el protocolo PRP se tienen dos redes que no están conectadas directamente entre ellas, como
se indica en la figura 2. Cualquier falla en una de estas redes debe ser independiente de la otra.
Figura 2 Esquema conceptual del protocolo de redundancia PRP
Fuente: CELEC EP – TRANSELECTRIC. Manual de especificaciones técnicas para el
SAS MAN-DIS-03
La arquitectura del sistema consta de cuatro niveles jerárquicos, que se definen teniendo en
cuenta los distintos sitios de operación y su funcionalidad. Los recursos del SAS en cada nivel
de control, deben ser suficientes para garantizar la operación segura y eficiente, tanto en modo
local como remoto, desde la subestación y los centros de control de CELEC EP -
TRANSELECTRIC y CENACE. El anexo 1 presenta la arquitectura de control del SAS de una
subestación 230/138 kV.
Además todos los equipos componentes del SAS (IEDs, computadoras de adquisición y gateway,
entre otras) están sincronizados en el tiempo a través de un sistema GPS redundante.
Dependiendo la arquitectura de la red y la tecnología utilizada para los TCs y TPs
(convencionales u ópticos) se puede utilizar uno o varios protocolos de sincronización de tiempo:
SNTP, IRIG-B, PTP (protocolo de precisión de tiempo - IEEE 1588).
6.3.2. Confiabilidad y disponibilidad del SAS
Las redes LAN utilizadas en los sistemas SAS comparten toda la información de la subestación
y cualquier falla o interrupción que afecte considerablemente su estabilidad reduce la
confiabilidad del sistema de automatización. Es muy importante mitigar el posible riesgo de
indisponibilidad del sistema a un nivel aceptable. Estos riesgos de falla se expresan como una

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
18
estimación de tiempo de inactividad en el período de un año. Los cálculos expresan
probabilidades y dependen de la configuración de los componentes del sistema.
La norma IEC 61850 en su parte 3 detalla los requisitos de calidad tales como confiabilidad,
disponibilidad, mantenibilidad, seguridad e integridad de datos, que se aplica a sistemas de
comunicación utilizados para la supervisión, configuración y control de procesos dentro de la
subestación.
La confiabilidad en un sistema de control se logra cuando a pesar del fallo en un componente de
comunicación, la subestación continúa siendo operable. No debe haber ningún punto de falla que
provoque una pérdida de funciones no detectada, falla de componentes en cascada, falla de
ambos equipos redundantes o acciones de control no deseadas tal como disparar o cerrar un
interruptor. Un solo punto de falla no debe deshabilitar funciones críticas de protección, control
primario, medición, etc. Para cumplir este requisito, se consideran los siguientes aspectos:
Ante una falla que no se considere crítica en el tiempo, el SAS puede ejecutar acciones
lógicas de control, tales como conmutación automática de equipos redundantes. El fabricante
deberá indicar claramente el tiempo requerido para ejecutar esta conmutación.
Las funciones de protección funcionarán de forma autónoma con un alto nivel de redundancia
(protección principal y redundante) e incluirá conmutación automática ante fallas.
La IHM del SAS debe ser capaz de operar independientemente de la interfaz existente en
los centros de control, teniendo un manejo local de todos los eventos y alarmas presentadas,
además del control y supervisión. Se requiere enlaces de comunicación redundantes entre
bahías y hacia el nivel de estación.
Las fuentes de alimentación de los elementos o equipos redundantes del SAS deben ser
independientes.
La disponibilidad representa la relación entre el tiempo de actividad del SAS y el tiempo total, tal
como se define en apartado 3.2 de IEC 60870-4. Se considera al sistema disponible cuando
incluso ante el fallo de un equipo existe otro redundante que asuma sus funciones de control o
protección. Por ejemplo, cuando existe una protección de respaldo operativa, no se considerará
que el fallo de la protección primaria contribuye al tiempo de inactividad. Además un sistema SAS
debe tener enlaces de comunicación redundantes que permitan un enrutamiento alternativo de
los datos.
Se debe garantizar la integridad de datos aún ante la presencia de errores de transmisión y fallos
de equipos en la red de comunicación. Por lo tanto el sistema debe proporcionar:
Detección de errores de transmisión en un entorno de subestación ruidosa;
Recuperación de enlaces de red saturados;

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
19
Soporte opcional para enlaces, medios y redundancia de equipos.
Adicional, para evitar la pérdida de información almacenada, ante el fallo de una unidad de
adquisición se debe tener un sistema de respaldo que genere una copia de seguridad de datos.
En la norma IEC 60870-4 se encuentran definidos los criterios de disponibilidad que deben
cumplir los sistemas SAS y los índices que deben ser presentados por los fabricantes:
Se deberá indicar claramente el tiempo medio de falla (MTTF) de los IEDs y equipos ubicados
a nivel de proceso, bahía y estación, incluyendo la referencia a un método estándar de
cálculo (definido en 3.1.2 de IEC 60870-4 - clase R3).
El tiempo medio de recuperación ante fallas (MTTR) es el tiempo que el personal entrenado
en mantenimiento requiere para restaurar el elemento de falla del sistema SAS. Este tiempo
no deberá ser mayor a cuatro (4) horas (IEC 60870-4 tabla 3 - clase M4).
La disponibilidad anual del SAS debe ser del 99.99% o superior (IEC 60870-4, tabla 2 - clase
A3). De acuerdo a este criterio, el tiempo de inactividad máximo del sistema deberá ser de
5.25 minutos por año, para cumplir con la disponibilidad mínima requerida.
En los enlaces de comunicación entre nivel de estación y nivel de bahía, pueden ocurrir
interrupciones siempre que no perturben la operación a través del IHM ni produzca pérdida de
eventos. El requisito de "ninguna pérdida de eventos" puede realizarse con el almacenamiento y
retransmisión de eventos desde los IEDs. A nivel de bahía (entre IEDs), una interrupción de la
comunicación no debe causar pérdida de funciones de control, es decir que un equipo no pueda
ser operado por errores de comunicación, pérdida de información o mala calidad de señales de
interbloqueo provenientes de otras bahías; por lo tanto el tiempo de gracia debe ser bastante
corto. Para el nivel de proceso los servicios de comunicación son críticos en el tiempo, con
tolerancia de solo algunas muestras pérdidas en un flujo de datos. De acuerdo al diseño
adoptado, es posible enviar disparos al interruptor a través del bus de proceso (mensaje
GOOSE), por lo que una interrupción debe ser detectada y manejada en el menor tiempo posible,
con requerimientos más exigentes que todos los demás mensajes rápidos del sistema. Los
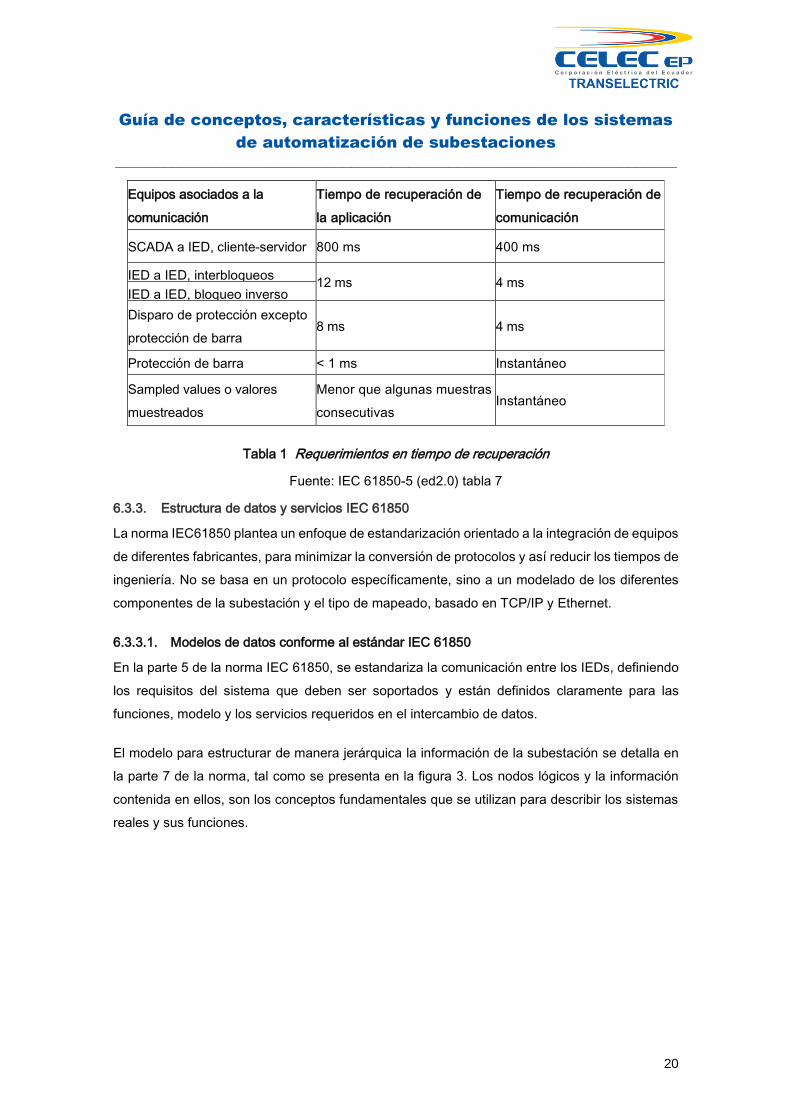
requerimientos en tiempos de recuperación compilados por el comité técnico IEC 57 (TC57)
grupo de trabajo 10 (WG10) e presentan en la tabla 1.
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
20
Equipos asociados a la
comunicación
Tiempo de recuperación de
la aplicación
Tiempo de recuperación de
comunicación
SCADA a IED, cliente-servidor 800 ms 400 ms
IED a IED, interbloqueos 12 ms 4 ms
IED a IED, bloqueo inverso
Disparo de protección excepto
protección de barra 8 ms 4 ms
Protección de barra < 1 ms Instantáneo
Sampled values o valores
muestreados
Menor que algunas muestras
consecutivas Instantáneo
Tabla 1 Requerimientos en tiempo de recuperación
Fuente: IEC 61850-5 (ed2.0) tabla 7
6.3.3. Estructura de datos y servicios IEC 61850
La norma IEC61850 plantea un enfoque de estandarización orientado a la integración de equipos
de diferentes fabricantes, para minimizar la conversión de protocolos y así reducir los tiempos de
ingeniería. No se basa en un protocolo específicamente, sino a un modelado de los diferentes
componentes de la subestación y el tipo de mapeado, basado en TCP/IP y Ethernet.
6.3.3.1. Modelos de datos conforme al estándar IEC 61850
En la parte 5 de la norma IEC 61850, se estandariza la comunicación entre los IEDs, definiendo
los requisitos del sistema que deben ser soportados y están definidos claramente para las
funciones, modelo y los servicios requeridos en el intercambio de datos.
El modelo para estructurar de manera jerárquica la información de la subestación se detalla en
la parte 7 de la norma, tal como se presenta en la figura 3. Los nodos lógicos y la información
contenida en ellos, son los conceptos fundamentales que se utilizan para describir los sistemas
reales y sus funciones.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
21
Figura 3 Modelamiento de datos (IEC 61850)
Fuente: Fuente: IEC 61850-1 (ed2.0) figura 7
Dispositivos físicos (PHD): son los IEDs físicos o servidores, identificados por una dirección
de red (IP). Los servidores internamente cuentan con uno o varios dispositivos lógicos.
Dispositivos lógicos (LD): Los dispositivos lógicos pueden ser funciones de: control,
protección, medición y supervisión. Varios nodos lógicos construyen un dispositivo lógico.
Nodos lógicos (LN): La norma IEC61850 asigna a cada función dentro de un equipo de la
subestación (Transformador, interruptor automático, función de protección, etc.) un nodo
lógico (LN). Los nodos lógicos pueden ser de control, funciones de protección, relacionados
con equipamiento primario, IEDs, seguridad y servicios del sistema (Figura 4).

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
22
Figura 4 Representación de componentes de la subestación en nodos lógicos
Fuente: CELEC EP – TRANSELECTRIC.
Objetos de Datos (DO): es una variable que adopta un valor directamente del proceso y
caracteriza al dato, posee un nombre y un tipo.
Atributos del Dato (DA): es una variable que adopta un valor directamente del proceso y
caracteriza al dato, posee un nombre y un tipo.
6.3.3.2. La norma IEC 61850-7-4 define una lista de aproximadamente 90 nodos lógicos, para
varias funciones y dispositivos de la subestación, como por ejemplo: “XCBR”, para
designar el interruptor; “PIOC”, para designar la protección contra sobrecorriente;
“MMXU” para designar mediciones operativas, etc.Servicios de comunicación
conforme al estándar IEC 61850
La norma IEC 61850-7-2 identifica el conjunto de servicios de comunicación abstracta (ACSI)
que permiten el intercambio de información compatible entre los componentes de un sistema de
automatización de subestaciones. La norma presenta tres tipos de modelos de comunicación:
a) Modelo de servicios de comunicación tipo cliente / servidor (MMS).
b) Distribución rápida y fiable de datos a nivel de todo el sistema, basada en un modelo de
editor-suscriptor. Para ello se define la estructura de dos tipos de mensajes:
- GOOSE - multidifusión digital analógica y digital
- GSSE - intercambio de datos digitales sobre multicasts (obsoletos)
c) Modelo de Valores Muestreados (SMV - sampled values) para datos de medición tipo
multidifusión.
Estos objetos abstractos deben ser "mapeados" mediante el uso de aplicaciones concretas,
protocolos y perfiles de comunicación descritos dentro de un servicio de mapeo de comunicación
específica (SCSM), como se define en las partes 8 y 9 de la norma.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
23
El objetivo básico es la interoperabilidad entre varios dispositivos. La manera en que se
especifica el conjunto de servicios y objetos abstractos de comunicación, permite que el estándar
sea independiente a un protocolo específico, sin embargo sólo los componentes de aplicación
que implementen el mismo SCSM serán interoperables.
En la figura 5 se presentan los servicios de comunicación utilizados entre los equipos del SAS,
en los distintos niveles de control.
Figura 5 Servicios de comunicación IEC61850
Fuente: CELEC EP – TRANSELECTRIC. Manual de especificaciones técnicas para el SAS
MAN-DIS-03
6.4. Arquitectura básica del sistema de control
En la figura 6 se describen los distintos niveles de control existentes en una subestación. Las
maniobras de apertura y cierre desde nivel de proceso (nivel 0) son consideradas con fines de
mantenimiento. Las maniobras de operación se consideran para niveles de bahía y subestación.
Se requiere que todas las funciones que se manejan a nivel de bahía (nivel 1) se manejen
también a nivel de subestación (nivel 2). Cada nivel de control deberá tener la funcionalidad
suficiente para garantizar una operación segura y eficiente, permitiendo detectar fallas y
visualizar la secuencia de eventos en las interfaces de usuario a nivel 1 (IU local del IED) y nivel
2 (IHM).

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
24
Figura 6 Niveles de control de la subestación
Fuente: CELEC EP – TRANSELECTRIC. Manual de especificaciones técnicas para el SAS
MAN-DIS-03
Los enlaces de comunicación existentes entre los equipos de la subestación pueden clasificarse
en: vertical y horizontal. Existe comunicación vertical entre diferentes niveles de control, por
ejemplo el SCADA (nivel de estación) y los IEDs (nivel de bahía) y comunicación horizontal dentro
del mismo nivel de control entre IEDs especialmente a nivel de bahía.
6.4.1. Nivel 0 – nivel de proceso
El nivel 0 de control permite supervisar en sitio y realizar maniobras requeridas durante el
mantenimiento de los equipos de patio de la subestación, uno a la vez, es decir, un seccionador,
un interruptor, un LTC, etc.; donde los enclavamientos son constituidos por conexiones
cableadas en cobre, presentando automatismos electromecánicos. En este nivel se deberá
ejecutar la supervisión y control de manera directa desde tableros de control local ubicados en
patio junto a cada equipo de maniobra.
Las señales digitales tales como posición de equipos de patio, alarmas y bloqueos son cableadas
hacia entradas digitales de IEDs que pueden estar ubicados en patio (merging units) o en casetas
de control hacia los BCUs y protecciones.
Los disparos desde las protecciones y comandos desde el controlador de bahía se realizan por
medio de cableado hasta los equipos de patio correspondientes. En el caso de existir merging
units las conexiones con cable se limitarían entre contactos secos de los IEDs en patio hasta los
equipos de maniobra correspondientes.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
25
Como indica la figura 5, el intercambio de información entre merging units (sensores y
actuadores) y IEDs ubicados en casetas de control es por comunicación a través del bus de
proceso, con cableado virtual, es decir señales digitalizadas.
Las señales analógicas de voltaje y corriente en cada bahía se conectan por medio de cableado
de cobre directamente desde las cajas de agrupamiento de los transformadores de voltaje y
corriente hacia los IEDs en nivel 1: controladores de bahía, relés de protección, DFRs, PMUs y
medidores de energía ubicados en las casetas de patio. Conforme a la tecnología adoptada, en
un futuro estas señales pueden provenir de merging units analógicas o de TCs y TPs ópticos,
que envíen información digitalizada de voltajes y corrientes desde patio (valores muestreados).
6.4.2. Nivel 1 – nivel de bahía
El nivel 1 corresponde a los IEDs de control y protección que permiten supervisar y controlar
todos los equipos en cada bahía. Los comandos desde este nivel se realizan a través de una
interfaz local (teclado/display/leds) incluida en el IED, donde se despliegan diagramas unifilares
e información de eventos y alarmas. Las maniobras permitidas obedecen a enclavamientos que
se programan con criterio operativo. La integración de este nivel con los niveles superiores se la
realiza por medio del bus de estación. También forman parte de este nivel los registradores de
fallas (DFR) y medidores de energía.
Para garantizar la interoperabilidad de los IEDs y su concordancia con la norma IEC 61850, los
equipos deben cumplir con características que se especifican en los documentos de conformidad
MICS, PICS, PIXIT y TICS (IEC 61850-10 ed. 2). Estos documentos certifican el modelo de datos,
servicios del protocolo y capacidades de comunicación específicas soportadas por los
dispositivos, asegurando su compatibilidad con equipos nuevos que deban ser integrados al
sistema para compartir información con dispositivos de otras bahías.
El enlace e intercambio de datos entre los dispositivos de una subestación está implementado
en una red de datos redundante para control, monitoreo, gestión y sincronización; especificado
con protocolos del estándar IEC 61850-5 punto 5.2.3 que se presentan en la figura 7. A nivel de
bahía se tiene las interfaces lógicas 3 (entre dispositivos de una misma bahía) y 8 (entre
dispositivos de distintas bahías). El enlace entre el nivel 1 (bahía) y el nivel 2 (estación) es a
través de las interfaces lógicas 1 (datos de protección) y 6 (datos de control).

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
26
Figura 7 Modelo de interfaces de comunicación definidas en el estándar IEC61850Fuente:
IEC 61850-1 (ed.2.0). Parte 1 Introducción y visión general
Los archivos de configuración de equipos IEDs tales como: SCL basados en un lenguaje XML
(ICD, CID, SCD), data sets, reportes, bases de datos, configuraciones, ajustes, entre otros;
deben quedar respaldados en el computador de gestión de la subestación. Esta configuración
será utilizada en la ejecución de pruebas, puesta en servicio, mantenimiento y futuras
ampliaciones del sistema de control.
6.4.3. Nivel 2 – Nivel de estación
El nivel 2 o nivel de estación se encuentra ubicado en la sala de control, desde donde se procesa
la información de toda la subestación para la supervisión, control y monitoreo en forma global y
en tiempo real (con sincronización de tiempo). Este nivel debe contar con equipos de adquisición
e interfaces humano – máquina (IHM).
Los equipos de adquisición deben ser redundantes, permitiendo el control local a nivel de
subestación. Las dos unidades deben operar conjuntamente en una configuración tipo hot – stand
by o hot – hot, dependiendo de la arquitectura considerada. Cuando quede fuera de servicio una
de las dos unidades, el equipo redundante debe garantizar que no exista degradación de ninguna
funcionalidad o información.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
27
Para el operador de la subestación se deben tener dos equipos IHM, que deben estar siempre
disponibles (redundancia hot-hot). La redundancia de los equipos de adquisición debe permitir
una redundancia de tipo hot-hot en los IHMs.
El sistema de sincronización de tiempo GPS y switches de comunicación que conforman la red
de comunicación del SAS pertenecen al nivel de estación.
El sistema SAS a nivel de estación debe estar conformado por los siguientes equipos:
Bus de estación con redundancia RSTP/PRP/HSR ethernet de 1GBPS para enlaces entre
switches y fast ethernet 100 MBPS para conexión de IEDs y equipos del SAS al bus de
estación.
2 unidades centrales de adquisición en configuración redundante “hot-hot” o “hot-standby”,
la conmutación entre ambas computadoras debe realizarse de manera automática
2 gateways de comunicación en configuración redundante “hot-hot” para el enlace con nivel
3. Los centros de control eligen con cuál computador conectarse y no debe existir
degradación de ninguna funcionalidad o pérdida de información.
2 interfaces humano-máquina IHM con conexión al bus de estación y redundancia hot-hot.
Sistemas de sincronización de tiempo (GPS)
Computador de gestión de mantenimiento con conexión a la red del sistema de
automatización de la subestación
Computador de almacenamiento y análisis del sistema de registradores de fallas
Cables de fibra óptica, patch-cords y cajas organizadoras de fibra óptica (ODF)
Firewall para control de acceso a la red SAS
Impresora de red
Todos los equipos que conforman el nivel 1 y 2 deben tener una fuente de alimentación a 125
Vdc. Para computadoras que requieran alimentación Vac se debe considerar un sistema de
alimentación ininterrumpida o UPS. Además los servidores SCADA (computadores de
adquisición), gateway e IHM deben compartir la misma base de datos.
6.4.4. Nivel 3 – centros de control
El nivel 3 corresponde a la supervisión y control de los equipos de todas las subestaciones del
SNT desde los centros de control de CENACE y CELEC EP - TRANSELECTRIC (COT) a través
de los gateways, utilizando puertos de comunicación serial y/o ethernet para los protocolos IEC
60870-5-101 y/o IEC 60870-5-104.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
28
En el caso del protocolo 101, cada gateway se configura con igual ASDU address, pero diferente
link address, y el puerto serial de cada gateway debe conectarse con un único canal de
comunicaciones, es decir, a nivel de conexionado se debe prever un equipo que permita esta
conexión: puerto serial del gateway 1 o puerto serial del gateway 2. La selección de cuál gateway
se interroga, dependerá del centro de control, mediante un automatismo que verifica la
disponibilidad de cada uno.
En el caso de 104, a cada gateway se le asigna una IP diferente y el centro de control decide a
cuál interrogar.
En la figura 8 se presenta la arquitectura de comunicación del SAS acorde a la norma IEC 61850,
estructurada en sus distintos niveles e identificando los equipos componentes a cada nivel.
Figura 8 Arquitectura conceptual de un SAS conforme a la IEC 61850 edición 2
Fuente: CELEC EP – TRANSELECTRIC. Manual de especificaciones técnicas para el SAS
MAN-DIS-03
6.4.5. Modos de control
Cada nivel de control, excepto el nivel 3, deberá permitir los modos de control: local y remoto.
6.4.5.1. Comando local
La función de comando local de la subestación debe incluir los siguientes tipos de comando:
Comando local nivel 0 (equipo en patio de maniobras)
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
29
Comando local nivel 1 (bahía – interfaz en BCU local)
Comando local nivel 2 (subestación - IHM)
El comando local a nivel 0 corresponde a las maniobras de cierre y apertura realizadas
directamente en los equipos en patio, realizadas únicamente con fines de mantenimiento o
emergencia. Para estos comandos se deben considerar enclavamientos electromecánicos y
maniobras de arranque, parada y toma de carga del grupo diesel de servicios auxiliares.
Los comandos en nivel 1 deben estar habilitados cuando los equipos correspondientes de nivel
0 se encuentren en remoto. Los IED de control y protección ejecutan los comandos utilizando
enclavamientos configurados en lógicas de programación previamente definidas y aprobadas.
Los enclavamientos programados en los IED de control deben ser diseñados, implementados y
probados de acuerdo al anexo 2 de este documento, para asegurar que los comandos conflictivos
o indebidos no sean realizados. Los IEDs transmiten información a otros de varias bahías
utilizando protocolos especificados en el estándar IEC 61850-5 punto 5.2.2, a través de la interfaz
lógica 8 (datos directos entre bahías especialmente funciones rápidas como interbloqueos).
El comando de nivel 1 es completamente independiente del nivel 2 (subestación), de esta forma
se garantiza su operatividad cuando se pierde comunicación con el nivel superior. Los comandos
en nivel 1 siguen la lógica de operación select-before-execute.
La selección y comando local en nivel 1 debe obligatoriamente tener:
Comando de los equipos de corte y maniobra, tales como interruptores y seccionadores
Reposición de relés de bloqueo y protección
Bloqueo/habilitación de la función de recierre automático
Habilitar el control local/automático de equipos
Arranque/parada del sistema de enfriamiento de los transformadores
Subir/Bajar taps de OLTC del transformador/autotransformador
Maniobra de transferencia manual de servicios auxiliares
Arranque/parada manual del grupo diesel y toma de carga
El comando local en nivel 2 se puede realizar mediante una de las dos interfaces IHM locales,
que permiten la operación de la subestación con todas sus funcionalidades, para esto utiliza los
enclavamientos programados en los IED de control y protección de cada bahía, que finalmente
evalúan si el comando se puede ejecutar o no. Todas las funciones de comando de nivel 2 son
controladas por las unidades centrales de adquisición, una a la vez.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
30
El nivel de jerarquía operativa respecto a la selección local / remoto es superior a nivel 0, es decir
si en nivel 0 se selecciona local (por cada equipo en patio), todos los demás niveles perderán el
control del respectivo equipo. La selección de control local a nivel 1 (a nivel de bahía completa),
permite comandar los equipos desde las BCUs, excepto los que se encuentren en local a nivel
0. Los niveles 2 y 3 tienen habilitado el control únicamente cuando nivel 1 está en remoto. Igual
situación entre los niveles 2 y 3.
6.4.5.2. Comando remoto
El SAS debe tener conexiones independientes con los centros de control del CENACE y de
CELEC EP-TRANSELECTRIC (COT), de forma que permita la operación de la subestación
desde este nivel. A nivel de centros de control se habilitan los siguientes comandos:
Comandar todos los interruptores de potencia
Comandar los seccionadores (excepto los de puesta a tierra)
Comandar arranque / parada del sistema de enfriamiento de transformadores
Subir/bajar la posición del tap del OLTC del transformador/autotransformador
Habilitar / deshabilitar la función de recierre de líneas.
6.4.5.3. Interconexión con los centros de control: CENACE Y COT
Los dos centros de control podrán supervisar la subestación, teniendo el control solamente si se
habilita desde la IHM de la subestación (control remoto). La interconexión entre el SAS de la
subestación y los centros de control se establece mediante los protocolos de comunicación IEC
60870-5-101 y/o IEC 60870-5-104.
Los datos análogos a ser transferidos hacia nivel 3 se constituyen como un subconjunto de los
adquiridos o calculados por el SAS y deben ser filtrados por banda muerta. Las mediciones
realizadas en cada bahía son las siguientes:
Módulo de tensión fase-fase en kV en las barras
Módulo de tensión fase-fase en kV en las bahías
Módulo de corriente por fase en kA en las bahías
Potencia trifásica activa en MW y reactiva en MVAR de las bahías
Frecuencia en las barras de cada nivel de voltaje
Toda la información de eventos digitales registrada en el sistema de control y protecciones (IEDs
de control, protecciones, entre otros) debe ser susceptible a transferirse hacia los centros de
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
31
control a través de un gateway, en tiempo real y con información de calidad y estampa de tiempo
válidas, de forma que permita tener su secuencia temporal.
6.5. Equipos componentes del SAS
Los controles y funciones de protección de los diferentes equipos del sistema deben usar
plataformas de hardware y software abierto. Además deben enlazarse por redes de
comunicación acorde a estándares internacionales, que permitan obtener un sistema altamente
modificable, expandible y continuamente actualizable en el tiempo.
Para monitorear el estado de los equipos, se habilita la función de supervisión de falla (watchdog)
entre los IED de control, por medio de cableado a otros IED cercanos. La notificación a los niveles
superiores de control se realiza por medio de la red de control. Además reciben una señal de
sincronización horaria por satélite GPS para la marcación en tiempo real del registro secuencial
de eventos. Estas señales pueden ser de protocolo SNTP, IRIG-B o PTP.
Como lo indica la parte 3 de la norma IEC 61850, punto 6.7: los IEDs y sistemas de comunicación
del SAS, deben diseñarse y probarse para soportar diversos tipos de perturbaciones
electromagnéticas conducidas y radiadas inducidas, continuas y transitorias, que se producen
en las subestaciones por ondas viajeras, transitorios rápidos, transitorios de operación y
descargas atmosféricas. Pueden ser fenómenos continuos, únicos o repetitivos, con alta o baja
ocurrencia. En algunos casos se puede tomar medidas especiales de mitigación, por ejemplo, el
uso de cableado especial o blindaje de algunas áreas para crear un ambiente "protegido" y
reducir los requisitos de inmunidad. Los detalles de estos requisitos y procedimientos de prueba
se exponen en las normas IEC 61000 e IEC 60255.
6.5.1. Equipos de nivel 0
6.5.1.1. Unidades de control de aparamenta (SCU) o merging units digitales
Los controladores de aparamenta o merging unit digitales están identificadas en la norma IEC
61850 como equipos actuadores. Estos IEDs se ubican en tableros denominados “junction box”
en patio y se encargan de recibir la información desde todos los equipos a nivel de proceso
(generalmente equipo eléctrico primario) y reflejar comandos digitalizados provenientes de otros
IEDs a través de sus entradas y salidas digitales. Estos datos los procesa y publica a otros IEDs
en formato digital (basada en IEC 61580-8-1) a través del bus de proceso. El número de entradas
y salidas debe corresponder con los equipos de patio a supervisar y comandar, considerando
mantener un margen de reserva. Debe considerarse también la posibilidad de ampliar la cantidad
de entradas y salidas instaladas en el equipo.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
32
6.5.1.2. Merging units analógicas (MU)
Las merging unit analógicas están identificados en la norma IEC 61850 como equipos sensores
y son aquellos que adquieren las señales de voltaje y corriente desde los transformadores de
medida convencionales, convirtiendo las señales analógicas en digitales y transmitiéndolas
desde patio a los IEDs en tableros de control y protección por medio de fibra óptica utilizando el
protocolo IEC 61850-9-2 LE.
6.5.1.3. Equipos de monitoreo de transformador
Entre los equipos requeridos para el monitoreo del transformador/autotransformador, uno por
cada unidad sea monofásica o trifásica, se incluyen IEDs para la supervisión, monitoreo y control
de los dispositivos propios del transformador/autotransformador convencional, tales como
instrumentación, sistema de enfriamiento, alarmas, analizador de gases y equipo de regulación
automática y OLTC. Algunos de estos equipos se enlazan directamente a los equipos de
adquisición a través del bus de estación.
6.5.2. Equipos y sistemas de nivel 1
Los equipos de nivel de bahía deben instalarse en lugares cerrados debidamente protegidos,
generalmente en casetas de patio.
6.5.2.1. Unidades de control de bahía (BCU)
Los controladores de bahía son IEDs encargados de recibir y procesar información de equipos
de patio a través de entradas/salidas e intercambiar información con otros equipos por medio de
comunicación utilizando la red ethernet del SAS. Se debe poder ampliar la cantidad de entradas
y salidas instaladas en el equipo.
Los IEDs de control y protección deben ser multifuncionales y programables, para manejar la
lógica de enclavamientos y automatismos de cada bahía. Además debe contar con dos puertos
de fibra óptica multimodo necesarios para interconectarse con la red redundante de control y
recolectar la información de otros IEDs del sistema a través de protocolos especificados en la
norma IEC61850-8-1 (GOOSE y MMS), que garanticen alta funcionalidad y confiabilidad. En
estos dispositivos se configuran los enclavamientos, visualización de medidas, eventos
secuenciales y señalización de alarmas para ejecutar el control local-manual, automático y
remoto, de los equipos asociados.
A nivel de hardware, los controladores de bahía requieren las siguientes interfaces:
LEDs de anuncio de alarma configurables
Una pantalla LCD de mínimo 6” para interacción con el usuario

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
33
Entradas binarias para información de estado y alarmas de los equipos de maniobra en patio,
watchdog de otros IEDs y breakers de alimentación, señales simples y dobles (el número de
entradas binarias se reduce significativamente con el uso de merging units digitales, debido
a que el cableado ya no sería físico, sino lógico a través de comunicación y señales GOOSE)
Salidas de comando simple y doble para el control de equipos de patio (al igual que con las
entradas binarias, el número de salidas binarias se reduce significativamente con el uso de
merging units digitales)
Entradas analógicas de voltaje y corriente para medición de estos valores y a partir de ellos,
el cálculo de todos los parámetros eléctricos necesarios
Entradas de 4-20 mA, para indicación de temperatura de transformadores, información del
analizador de gases en transformadores, temperatura ambiente, posición del tap del LTC,
entre otros.
Los controladores de bahía requieren las siguientes funcionalidades:
Despliegue del diagrama mímico de la bahía.
Despliegue de alarmas con estampa de tiempo.
Despliegue de eventos con estampa de tiempo.
Despliegue de medidas de proceso de la bahía (incluye las medidas de voltaje, corriente,
frecuencia, potencia activa, potencia reactiva, entre otros).
Control local (nivel 1) de los equipos que forman parte de la bahía.
Manejo de la posición del control de la bahía (local / remoto) mediante botones de función.
Despliegue del estado de las tarjetas que forman parte del equipo.
6.5.2.2. IEDs de protección
El sistema de protección se diseña para proveer seguridad a los equipos y/o elementos de un
sistema eléctrico (línea, barra, transformador, capacitor o reactor) en una forma rápida y
selectiva. Su principal objetivo consiste en minimizar el impacto de una falla en el sistema
eléctrico, para evitar que afecte su funcionamiento o se produzcan daños importantes en los
equipos, aislando el elemento o sección en falla del sistema de potencia.
Los IEDs de protección son equipos de tecnología digital del tipo "programable", basados en
microcontroladores para el procesamiento de la información de entrada. Debe permitir el cambio
de características de operación y facilidades de presentación de ajustes, programación y
disparos. Deben disponer de autodiagnóstico continuo de todos los circuitos, interfaz con display,
teclado y LEDs de indicación (programables), puertos de comunicación posterior para red de
gestión de protecciones e integración con el sistema, disponibilidad para parametrización y

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
34
cambio de ajustes en forma local (puerto frontal) y remota (red ethernet de gestión de
protecciones), además de sincronización de tiempo mediante señal GPS.
Los IEDs deben enviar al sistema de control, las alarmas y eventos de disparo, al igual que la
indicación de dispositivo no disponible. Los disparos deben discriminarse por función de
protección, presentarse en un display frontal y por medio de indicadores LED.
Los equipos de protección deben permitir el almacenamiento de registros oscilográficos con
resolución mínima de 16 muestras por ciclo y una longitud de hasta 24 ciclos. Se deben registrar
al menos los últimos 10 eventos con la información de hora, fecha, tipo de evento, distancia a la
falla y fases involucradas.
6.5.2.3. Unidad de control para servicios auxiliares
Para realizar el control y monitoreo de los sistemas de servicios auxiliares, se tiene el tablero de
supervisión de servicios auxiliares (TSSA) que debe incluir una RTU o IED controlador de bahía
(con suficientes entradas analógicas, digitales y funciones de gateway de ser el caso) integrado
al bus de estación del SAS por medio de protocolos de comunicación basados en la norma IEC
61850, switches, distribuidores de fibra óptica (ODF), una interfaz local (IHM local ubicada en el
tablero) y demás elementos y materiales necesarios para la supervisión de los servicios auxiliares
de la subestación. A través de este IED o RTU se puede realizar la transferencia de servicios
auxiliares, adquiriendo mediciones, señales y alarmas de cargadores de baterías, generador de
emergencia y tablero de transferencia automática. Adicional se debe considerar el uso de manijas
para una transferencia manual electromecánica en caso de fallo del equipo controlador.
6.5.3. Elementos de interfaz entre niveles 1 y 2
Los equipos de nivel 1 se deben conectar con los de nivel 2 (sala de control) a través de una red
redundante en fibra óptica, basada en ethernet, utilizando protocolos especificados en la norma
IEC 61850.
6.5.3.1. Cables con fibra óptica
La fibra óptica debe ser flexible, totalmente dieléctrica, tipo multimodo, protegida mecánicamente
y apta para ser instalada en canaletas, edificio de control y casetas de patio; cumpliendo con la
norma ITU G.651.1. La chaqueta del cable con fibra óptica debe proveer protección contra la
humedad e inmersión temporal en agua, así como también protección contra insectos y roedores.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
35
6.5.3.2. Distribuidores de fibra óptica (ODF)
Los distribuidores de fibra óptica (ODF) se utilizan en los extremos de los cables donde se
conectarán los equipos terminales de comunicaciones. En ellos se deberá efectuar la terminación
del cable con fibra óptica de manera que cada una disponga de un conector.
6.5.3.3. Switches de comunicación red SAS
Los switches de comunicación para la red de control, deben ser adecuados para ambientes
industriales con aplicación a subestaciones y alta interferencia electromagnética; deben estar
específicamente diseñados, probados y certificados en aplicaciones IEC 61850 para garantizar
alta confiabilidad y disponibilidad en instalaciones de alto voltaje. Todas las funciones requeridas
para switches y en general para equipos de la red SAS, se especifican en el reporte técnico IEC
61850-90-4, que es una guía para el diseño y la configuración de estas redes.
Los switches integrados a la red SAS deben incorporar herramientas de autodiagnóstico y
monitoreo.
Los switches deben cumplir con las características especificadas en los siguientes estándares:
Norma IEEE 1613: Libre de errores (dispositivos de red clase 2).
Norma IEC 61850-3: Redes para subestaciones.
Normas IEC 60068-2-6 e IEC 60068-2-27: Condiciones de estabilidad.
Norma IEEE 802.1P QoS: Calidad de servicio.
Norma IEEE 802.3: Estándar ethernet.
Switch administrable capa 2/3.
Funciones de administración SNMP.
Inmunidad:
Norma IEC 61000-6-2
Norma IEC 61850-3
Norma IEEE 1613 Clase 2
Norma NEMA TS 2
Protocolos de Red:
IEEE1588 PTP: Protocolo de Precisión de tiempo PTP.
IEEE 802.1w e IEC 62439-1 RSTP: Protocolo de redundancia de árbol de expansión
rápida - Rapid spanning tree protocol.
IEC 62439-3 HSR: Protocolo de redundancia de alta disponibilidad sin fisuras - High-
availability seamless redundancy.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
36
IEEE 802.1q VLAN: Soporte de LANs virtuales en una red ethernet.
IEEE 802.1p CoS, para transmisión de mensajes GOOSE (generic object oriented
substations events)
Los switches deben contar con el número de puertos suficientes para conectar todos los equipos
del sistema (equipos de control, protección y medida). Se debe considerar puertos adicionales
de reserva para una posterior integración o ampliación.
6.5.4. Equipos y sistemas de nivel 2
Los equipos de nivel de estación deben instalarse en lugares cerrados debidamente protegidos,
generalmente en la casa de control.
6.5.4.1. Sistema de sincronización de tiempo por satélite (GPS)
El sistema GPS consta de un equipo y una antena para la recepción de señal de satélite. El
equipo debe contar con los puertos necesarios que permitan la sincronización de tiempo con una
precisión de 250 ns, que deberá ser distribuida con una resolución menor o igual a 1 ms a los
equipos pertenecientes al bus de estación y proceso: IEDs de protección, IEDs de control de
bahía, medidores, registradores de fallas, PMUs y en general todos los equipos de nivel 0, 1 y 2
que realicen adquisición de señales, utilizando los protocolos SNTP, IRIG-B o PTP (IEEE1588
v2).
6.5.4.2. Unidades de adquisición y control de la subestación
Las unidades de adquisición son computadores utilizados para recibir, procesar, evaluar y
combinar en base a lógicas toda la información proveniente de los dispositivos IEDs y además
entregar información a las estaciones de operación. Se debe garantizar las siguientes
funcionalidades:
El sistema operativo de las unidades de adquisición y control debe garantizar el
funcionamiento en tiempo real y soportar características estándar del sistema, por ejemplo:
multitarea, niveles de seguridad, mecanismos de intercambio de datos (DDE, OLE DB) y
comunicación abierta de bases de datos (ODBC).
Recuperación de la información proveniente de los equipos IEDs, para presentarla en las
interfaces de operador IHMs.
6.5.4.3. IHM del sistema de supervisión y control
Las dos estaciones de operación (IHM) deben ser computadoras industriales que permitan
desplegar la información necesaria para efectuar el monitoreo y control de la subestación.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
37
Las IHM deber tener las siguientes funciones de control, monitoreo y diagnóstico:
Presentar el diagrama unifilar de cada patio de la subestación y diagramas unifilares por
bahía con indicación de los valores instantáneos (en tiempo real) de todas las medidas
analógicas (flujos de carga, corrientes, tensiones, frecuencia y demás medidas de interés en
líneas de transmisión, barras, transformadores, entre otros), además el estado de los equipos
de maniobra de la subestación (incluidos seccionadores de puesta a tierra). Señalizar la
presencia de tensión por medio de coloreo dinámico de barras, líneas y transformadores de
acuerdo a si están energizados o no, y en el caso de líneas de transmisión y barras, si están
puestas a tierra.
Presentar las lógicas de enclavamientos de operación programadas en nivel 1, para
identificar en forma clara los comandos permitidos para maniobra. De este modo se asegura
que los comandos conflictivos o indebidos no sean ejecutados, minimizando la posibilidad
de error por parte del operador y facilitando la ejecución de maniobras sobre interruptores y
seccionadores.
El sistema debe permitir la supervisión y control de todos los equipos de la subestación, con
la selección de modos de operación: IHM local y control nivel 3 (remoto). Debe permitir la
autosupervisión del sistema de control:
- Estado de los IEDs y sus puertos de comunicación.
- Estado de los enlaces de comunicación en los diferentes niveles del sistema SAS.
- Estado de los computadores de adquisición: normal / falla y hot / stand by.
- Estado del sistema de GPS.
- Enlaces de comunicación con los centros de control.
- Capacidad de manejar señales simples y dobles
Supervisar los equipos que conforman los servicios auxiliares y la red de comunicación,
utilizando coloreo dinámico y representando el estado de equipos y enlaces de red LAN del
sistema de supervisión y control.
Presentar la información asociada a alarmas y disparos de los IEDs de protección, por
ejemplo distancias a la falla en el caso de bahías de línea. Para la función de sincronismo se
debe presentar la diferencia de voltajes de barra y de bahía, en magnitud, frecuencia y
ángulo; más una indicación de condiciones de sincronismo dadas por el relé de protección
principal o de respaldo, para líneas, transformadores y otros.
Proporcionar la indicación secuencial de los eventos ocurridos en la subestación, generados
por los dispositivos IED de protección, y acciones realizadas por el operador local o por los
centros de control remoto (cambio de estado y comandos) con una resolución de 1 ms. Debe
facilitar la consulta de la lista de eventos mediante filtros y exportación a un archivo de Excel
para imprimirlo como reporte.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
38
En caso de falla o problemas en los equipos primarios, presentar una indicación visual y clara
del origen de la falla, facilitando la toma de decisiones. Indicar la causa de apertura de un
interruptor (por el disparo de una función de protección, la ejecución de un comando local /
remoto o por una razón distinta).
Almacenar en una base de datos los valores analógicos (V, I, P, Q, f) medidos en períodos
de tiempo ajustable. Presentar en tablas y gráficos las curvas de tendencia en “tiempo real”
de variables analógicas. Estas tendencias históricas deben mostrar como mínimo los datos
de las últimas 6 horas (antes del momento de la consulta), con posibilidad de cálculos
matemáticos y escalonamiento de valores. Mostrar la temperatura del aceite y devanados, y
demás parámetros supervisados en transformadores.
Permitir las funciones de reconocimiento de alarmas y cambio de límites utilizados para
señalización de alarmas en medidas analógicas.
6.5.4.4. Gateways de comunicaciones
El sistema de gateways de comunicación debe ser redundante y asegurar el flujo de información
con los centros de control remotos, pudiendo pre-procesar la información y realizar la conversión
de protocolos, de ser necesario. Se utiliza puertos de comunicación IEC 60870-104 para el centro
de operación de CELEC EP - TRANSELECTRIC e IEC 60870-5-101 /104 para CENACE.
Los gateways deben tener las siguientes funciones de control y monitoreo:
Transmisión de comandos desde los centros de control remoto hacia los equipos de la
Subestación.
Recuperación de la información proveniente de los equipos IEDs, para enviarla hacia los
centros de control remoto (mediciones, alarmas, cambios de estado, entre otros).
Recuperación de la información proveniente presentarla en las IHMs.
6.5.4.5. Computador de gestión de mantenimiento
El computador de gestión de mantenimiento debe permitir la programación, parametrización,
actualización y gestión de todos los IEDs de control y protección de la red SAS. En este equipo
deben estar instalados todos los programas que se requieran para la configuración de los
controladores de bahía y los relés de protección. Adicionalmente en esta computadora se debe
configurar un acceso remoto protegido.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
39
6.6. Características generales de los tableros para el SAS
Los tableros y sus componentes deben cumplir las previsiones estipuladas en la norma IEC
61850-3: parte 5 condiciones ambientales: rangos de temperatura, humedad, presión
barométrica, pruebas mecánicas y sísmicas de acuerdo a su ubicación y servicio. Se referencia
una serie de otras normas, como la IEC 60870-2 que describe las características ambientales
mínimas, clasificadas por nivel de severidad, que deben cumplir los equipos especialmente
instalados a nivel de proceso. En los casos en que el equipo forma parte integrante de
aparamenta de alta tensión también se aplicará la norma IEC 60694.
Los niveles de corrosión, humedad y contaminación se consideran en la norma IEC 60654-4,
prestando especial atención al efecto de las sustancias sólidas o corrosivas (sal, arena, polvo)
que pueden afectar el comportamiento térmico y conectividad de los equipos de comunicación.
Los tableros diseñados para instalación interior, en casetas cubiertas, deben tener un grado de
protección mínimo IP52, ser de tipo autosoportado, con puerta de acceso frontal con vidrio que
permita la visualización de los equipos. Los tableros diseñados para instalación a la intemperie
denominados junction box, deben tener un grado de protección mínimo IP65. Dentro de los
tableros se deberá suministrar resistencias para calefacción, controladas por higrostatos o
termostatos ajustables y lámparas para iluminación. Adicional se debe considerar un sistema de
aire acondicionado para las casetas de patio y sala de control.
Para cada equipo de protección se debe contar con un bloque de pruebas propio, ubicado en la
parte frontal del tablero correspondiente. Estos dispositivos permiten interrumpir los circuitos de
corriente, potencial, disparos (en caso de ser cableados) y/o bloquear los equipos de protección,
para evitar la emisión de interdisparos durante la realización de pruebas y ensayos.
6.6.1. Tablero de controlador de subestación
Para las unidades de control de subestación, se deberá incluir dos unidades centrales de
adquisición y control local de la subestación (configuración redundante), switches para
comunicación entre niveles 1 y 2 de la red de control, distribuidores de fibra óptica (ODF).
Se deberá instalar además el gateway para la comunicación con los centros de control, firewall
para seguridad de la red del SAS y un equipo GPS para la sincronización de tiempo.
6.6.2. Tableros de protección y control de línea
Los tableros de control de línea (TCL) deberán incluir un IED de control de bahía, relés de
protección redundantes y al menos un switch para comunicación con la red del SAS dependiendo
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
40
de la arquitectura presentada, distribuidores de fibra óptica (ODF) y demás elementos y
materiales necesarios para el control de los equipos de cada bahía de línea.
Las funciones de control de una bahía de línea consistirá en la adquisición, monitoreo y control
de las siguientes señales de equipos en cada bahía de línea:
Estado de los dispositivos y equipos de maniobra:
- Abierto/cerrado;
- Bloqueado/desbloqueado;
- Local/remoto;
- Alarmas de fallas mecánicas o eléctricas en equipos de maniobra (seccionadores e
interruptores);
- entre otros
Voltaje en las tres fases de la línea
Voltaje fase-fase de la línea
Corriente en las tres fases de la línea
Potencia activa y reactiva trifásica de la línea
Frecuencia de la línea
Diferencia de voltaje (magnitud, frecuencia y ángulo) entre línea y barra, para fines de
sincronización.
Energía activa y reactiva trifásica de la línea (para fines operativos, no de facturación)
Factor de potencia de la línea
6.6.2.1. Protección de líneas de transmisión
El sistema de protección de línea estará alojado en el tablero de línea. Los IEDs especializados
en protección de las líneas de transmisión deberán ser duplicados e independientes (funciones
de protección idénticas) para asegurar un sistema redundante y con capacidad de no omitir
disparos. Cada uno de estos tableros debe incluir como mínimo lo siguiente:
Un IED multifuncional especializado en protección de líneas que actúa como protección
principal - protección de línea 1 (PL1).
Un IED multifuncional especializado en protección de líneas que actúa como protección
redundante - protección de línea 2 (PL2).
Funciones de chequeo de sincronismo (25), recierre automática (79), que deberán ser
realizadas por los IEDs principales y/o redundantes.
Dos dispositivos de disparo (94) que utilizaran 2 relés auxiliares 94-1 y 94-2.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
41
Dos dispositivos de supervisión de los circuitos de disparo, 74-1, 74-2. La supervisión debe
ser con el interruptor en estado abierto y cerrado.
Un relé auxiliar del relé de disparo y bloqueo por 87B/50BF (86BX)
Los IEDs de protección de líneas deberán contar con las funciones de protección presentadas
en la tabla 2:
Descripción de funciones conforme a la norma ANSI
IED : Protección de línea 1 (PL1) y 2 (PL2)
Función de protección Código ANSI
Diferencial de línea 87L
Distancia 21 / 21N
Sobrecorriente de fases 50/51
Sobrecorriente de neutro 50 N/51 N
Sobrevoltaje 59
Bajo voltaje 27
Sobrecorriente direccional de fases y de neutro 67 / 67N
Bloqueo por falla fusible 97
Bloqueo por oscilación de potencia 68
Disparo por out of step 78
Teleprotección / esquemas de teleprotección 85
Sobrealcance permisivo / teleprotección 85-21 POTT
Subalcance permisivo / teleprotección 85-21 PUTT
Sobrecorriente direccional / teleprotección 85-67N
Disparo directo transferido / teleprotección DDT
Localización y monitoreo de fallas LF
Recierre automático 79
Verificación de sincronismo 25
Ruptura de conductor ----
Detección de carga ----
Factor de compensación residual ----
Lógica de cierre en falla (SOTF) ----
ECO y fuente débil (weak infeed) ----
Discrepancia de polos ----
Bloqueo para fallas de línea paralela ----
Detección de línea muerta ----
Registro de fallas ----
Tabla 2 Funciones de protección de línea descritas conforme a la norma ANSI
Fuente: CELEC EP – TRANSELECTRIC. Especificaciones técnicas 500 kV Ref. B1024449

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
42
6.6.3. Tableros de protección, control y medición de transformadores/autotransformadores
Los tableros de control del banco de transformadores/autotransformadores deben incluir un IED
de control de bahía, relés de protección redundantes y al menos un switch para comunicación
con la red del SAS dependiendo de la arquitectura presentada, distribuidores de fibra óptica
(ODF) y demás elementos y materiales necesarios para el control de los equipos de cada bahía
de transformadores.
La función de control de bahía del banco de transformadores consistirá en la adquisición,
monitoreo y control de las señales de los diferentes equipos de bahía del transformador o banco
de transformadores. Estas señales deberán incluir la siguiente información:
Estado de los dispositivos y equipos de maniobra:
- Abierto/cerrado,
- Bloqueado/desbloqueado,
- Local/remoto,
- Alarmas de fallas mecánicas o eléctricas en equipos de maniobra (transformador,
seccionadores e interruptores), entre otros
Tensión en las tres fases del transformador (tensión de la barra a la que está conectado)
Corriente en las tres fases del transformador
Potencia activa y reactiva trifásica del transformador
Frecuencia del transformador
Diferencia de voltaje (magnitud, frecuencia y ángulo) entre transformador y barra, para fines
de sincronización
Energía activa y reactiva trifásica del transformador (para fines operativos)
Factor de potencia del transformador
Temperatura de bobinados y aceite del transformador: bobinados de alta, media y baja
tensión de cada unidad monofásica, y del aceite
Posición, temperatura y mando remoto del LTC
El controlador de bahía del banco de transformadores también deberá realizar la supervisión del
sistema de enfriamiento de cada transformador y mando remoto de las diferentes etapas de
enfriamiento, integrando las señales de los tableros propios de los bancos de transformadores.
6.6.3.1. Protección de transformador/autotransformador
El sistema de protección de autotransformador estará alojado en los tableros de protección y
control, uno por nivel de voltaje, es decir un tablero para el lado de alta y otro para el lado de
baja. Cada uno de estos tableros debe incluir lo siguiente:
Un IED multifuncional especializado en protección de transformadores que actúa como
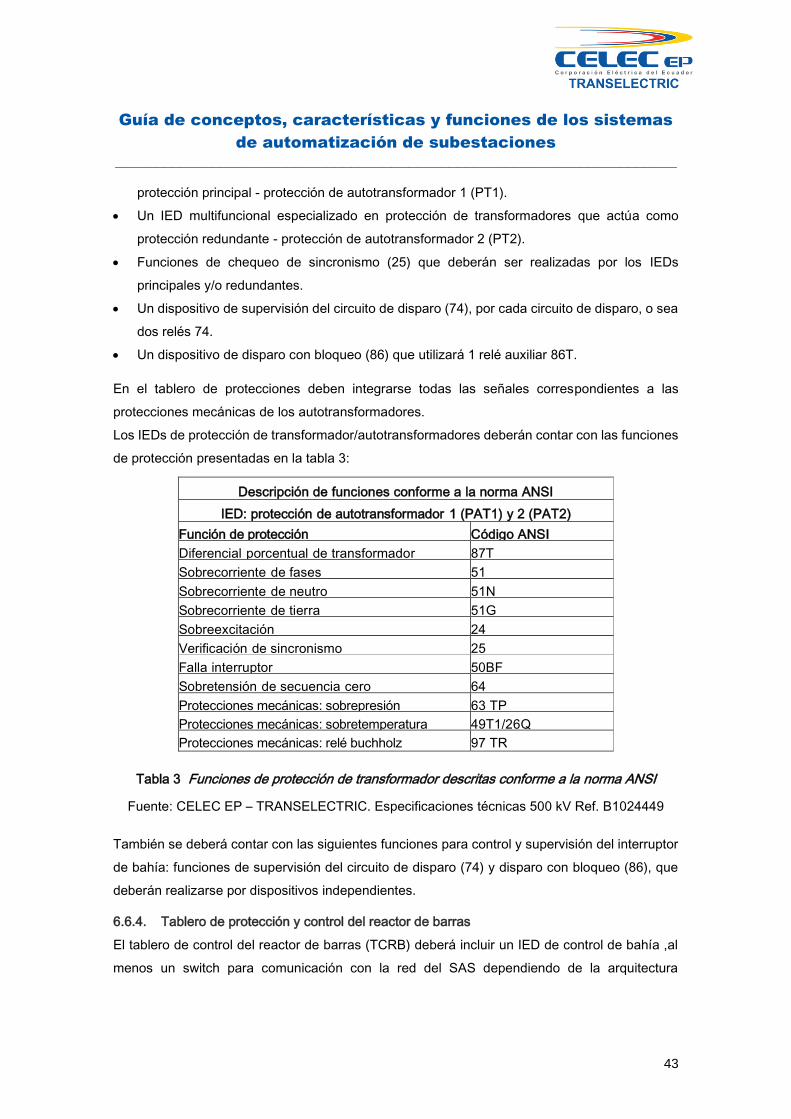
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
43
protección principal - protección de autotransformador 1 (PT1).
Un IED multifuncional especializado en protección de transformadores que actúa como
protección redundante - protección de autotransformador 2 (PT2).
Funciones de chequeo de sincronismo (25) que deberán ser realizadas por los IEDs
principales y/o redundantes.
Un dispositivo de supervisión del circuito de disparo (74), por cada circuito de disparo, o sea
dos relés 74.
Un dispositivo de disparo con bloqueo (86) que utilizará 1 relé auxiliar 86T.
En el tablero de protecciones deben integrarse todas las señales correspondientes a las
protecciones mecánicas de los autotransformadores.
Los IEDs de protección de transformador/autotransformadores deberán contar con las funciones
de protección presentadas en la tabla 3:
Descripción de funciones conforme a la norma ANSI
IED: protección de autotransformador 1 (PAT1) y 2 (PAT2)
Función de protección Código ANSI
Diferencial porcentual de transformador 87T
Sobrecorriente de fases 51
Sobrecorriente de neutro 51N
Sobrecorriente de tierra 51G
Sobreexcitación 24
Verificación de sincronismo 25
Falla interruptor 50BF
Sobretensión de secuencia cero 64
Protecciones mecánicas: sobrepresión 63 TP
Protecciones mecánicas: sobretemperatura
49T1/26Q
Protecciones mecánicas: relé buchholz 97 TR
Tabla 3 Funciones de protección de transformador descritas conforme a la norma ANSI
Fuente: CELEC EP – TRANSELECTRIC. Especificaciones técnicas 500 kV Ref. B1024449
También se deberá contar con las siguientes funciones para control y supervisión del interruptor
de bahía: funciones de supervisión del circuito de disparo (74) y disparo con bloqueo (86), que
deberán realizarse por dispositivos independientes.
6.6.4. Tablero de protección y control del reactor de barras
El tablero de control del reactor de barras (TCRB) deberá incluir un IED de control de bahía ,al
menos un switch para comunicación con la red del SAS dependiendo de la arquitectura
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
44
presentada, distribuidores de fibra óptica (ODF) y demás elementos y materiales necesarios para
el control de los equipos de la bahía del reactor de barras.
La función de control de bahía del reactor de barras consistirá en realizar la adquisición,
monitoreo y control de las señales de los diferentes equipos de la bahía. Estas señales deberán
incluir al menos la siguiente información:
Estado de los dispositivos y equipos de maniobra:
- Abierto/cerrado,
- Bloqueado/desbloqueado,
- Local/remoto,
- Alarmas de fallas mecánicas o eléctricas en equipos de maniobra (seccionadores e
interruptores), entre otros
Tensión en las fases del reactor
Corriente en las fases del reactor
Potencia activa y reactiva trifásica en el reactor
Frecuencia del reactor
Energía reactiva del reactor (con fines operativos)
6.6.4.1. Protección del reactor de barras
El sistema de protección del reactor estará alojado en un tablero de protección y control. Cada
uno de estos tableros debe incluir lo siguiente:
Un IED multifuncional especializado en protección de reactores de barras que actúan como
protección principal - protección de reactor de barra 1 (PR1).
Un IED multifuncional especializado en protección de reactores de barras que actúan como
protección redundante - protección de reactor de barra 2 (PR2).
Función de falla interruptor (50BF), que deberán ser realizadas por los IEDs principales y/o
redundantes.
Un dispositivo de supervisión del circuito de disparo (74).
Un dispositivo de disparo con bloqueo (86) que utilizará 1 relé auxiliar 86R.
En el tablero de protecciones deben integrarse todas las señales correspondientes a las
protecciones mecánicas del reactor. Además deberán contar con las funciones de protección
presentadas en la tabla 4:
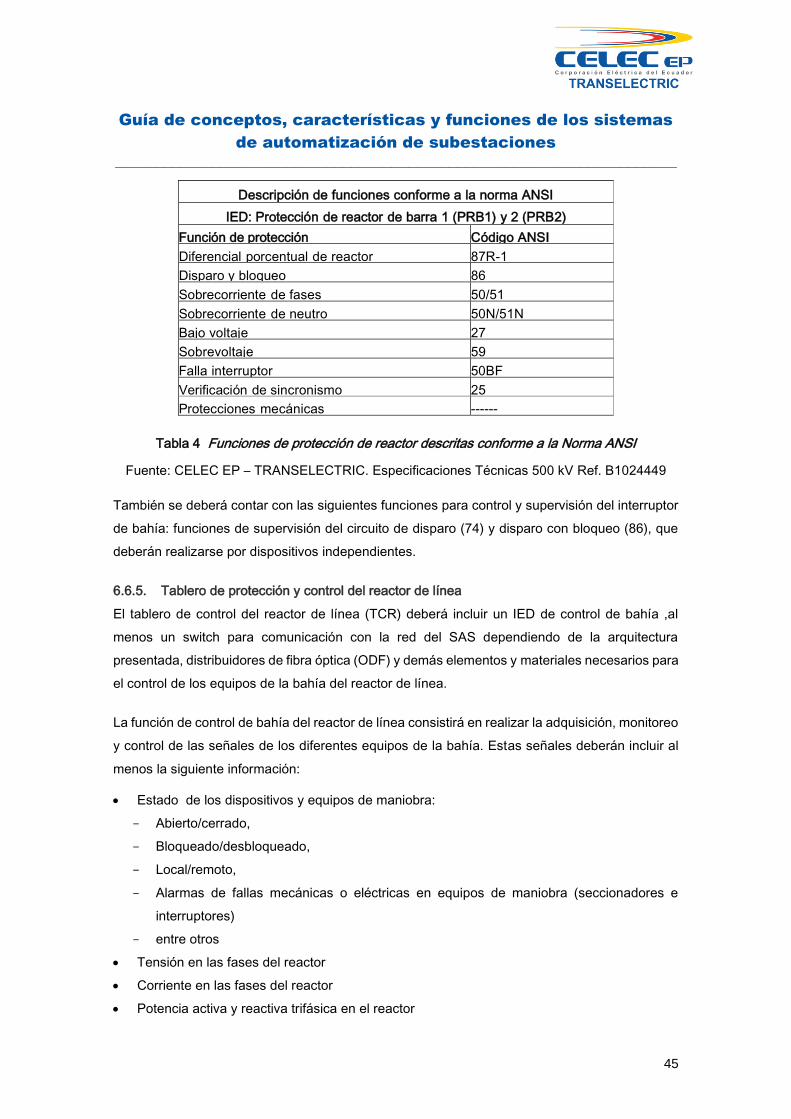
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
45
Descripción de funciones conforme a la norma ANSI
IED: Protección de reactor de barra 1 (PRB1) y 2 (PRB2)
Función de protección Código ANSI
Diferencial porcentual de reactor 87R-1
Disparo y bloqueo 86
Sobrecorriente de fases 50/51
Sobrecorriente de neutro 50N/51N
Bajo voltaje 27
Sobrevoltaje 59
Falla interruptor 50BF
Verificación de sincronismo 25
Protecciones mecánicas ------
Tabla 4 Funciones de protección de reactor descritas conforme a la Norma ANSI
Fuente: CELEC EP – TRANSELECTRIC. Especificaciones Técnicas 500 kV Ref. B1024449
También se deberá contar con las siguientes funciones para control y supervisión del interruptor
de bahía: funciones de supervisión del circuito de disparo (74) y disparo con bloqueo (86), que
deberán realizarse por dispositivos independientes.
6.6.5. Tablero de protección y control del reactor de línea
El tablero de control del reactor de línea (TCR) deberá incluir un IED de control de bahía ,al
menos un switch para comunicación con la red del SAS dependiendo de la arquitectura
presentada, distribuidores de fibra óptica (ODF) y demás elementos y materiales necesarios para
el control de los equipos de la bahía del reactor de línea.
La función de control de bahía del reactor de línea consistirá en realizar la adquisición, monitoreo
y control de las señales de los diferentes equipos de la bahía. Estas señales deberán incluir al
menos la siguiente información:
Estado de los dispositivos y equipos de maniobra:
- Abierto/cerrado,
- Bloqueado/desbloqueado,
- Local/remoto,
- Alarmas de fallas mecánicas o eléctricas en equipos de maniobra (seccionadores e
interruptores)
- entre otros
Tensión en las fases del reactor
Corriente en las fases del reactor
Potencia activa y reactiva trifásica en el reactor
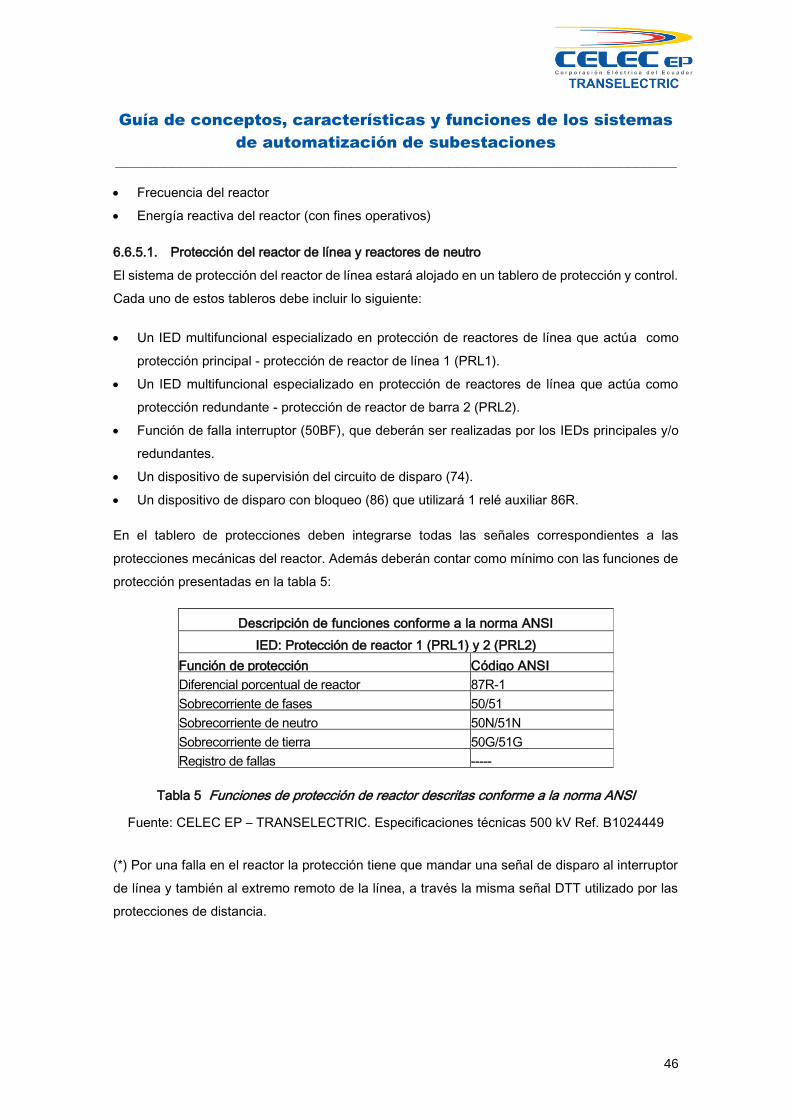
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
46
Frecuencia del reactor
Energía reactiva del reactor (con fines operativos)
6.6.5.1. Protección del reactor de línea y reactores de neutro
El sistema de protección del reactor de línea estará alojado en un tablero de protección y control.
Cada uno de estos tableros debe incluir lo siguiente:
Un IED multifuncional especializado en protección de reactores de línea que actúa como
protección principal - protección de reactor de línea 1 (PRL1).
Un IED multifuncional especializado en protección de reactores de línea que actúa como
protección redundante - protección de reactor de barra 2 (PRL2).
Función de falla interruptor (50BF), que deberán ser realizadas por los IEDs principales y/o
redundantes.
Un dispositivo de supervisión del circuito de disparo (74).
Un dispositivo de disparo con bloqueo (86) que utilizará 1 relé auxiliar 86R.
En el tablero de protecciones deben integrarse todas las señales correspondientes a las
protecciones mecánicas del reactor. Además deberán contar como mínimo con las funciones de
protección presentadas en la tabla 5:
Descripción de funciones conforme a la norma ANSI
IED: Protección de reactor 1 (PRL1) y 2 (PRL2)
Función de protección Código ANSI
Diferencial porcentual de reactor 87R-1
Sobrecorriente de fases 50/51
Sobrecorriente de neutro 50N/51N
Sobrecorriente de tierra 50G/51G
Registro de fallas -----
Tabla 5 Funciones de protección de reactor descritas conforme a la norma ANSI
Fuente: CELEC EP – TRANSELECTRIC. Especificaciones técnicas 500 kV Ref. B1024449
(*) Por una falla en el reactor la protección tiene que mandar una señal de disparo al interruptor
de línea y también al extremo remoto de la línea, a través la misma señal DTT utilizado por las
protecciones de distancia.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
47
6.6.6. Tablero de protección y control de banco de capacitores
El tablero de control de banco de capacitores (TCBC) deberá incluir un IED de control de bahía
al menos un switch para comunicación con la red del SAS dependiendo de la arquitectura
presentada, distribuidores de fibra óptica (ODF) y demás elementos y materiales necesarios para
el control de los equipos de la bahía de banco de capacitores.
La función de control de bahía de banco de capacitores consistirá en realizar la adquisición,
monitoreo y control de las señales de los diferentes equipos de la bahía. Estas señales deberán
incluir al menos la siguiente información:
Estado de los dispositivos y equipos de maniobra:
- Abierto/cerrado,
- Bloqueado/desbloqueado,
- Local/remoto,
- Alarmas de fallas mecánicas o eléctricas en equipos de maniobra (seccionadores e
interruptores)
Tensión en las fases del banco de capacitores
Corriente en las fases del banco de capacitores
Potencia activa y reactiva trifásica en el banco de capacitores
Frecuencia del banco de capacitores
Energía reactiva del banco de capacitores (con fines operativos)
6.6.6.1. Protección de banco de capacitores
Los IEDs de protecciones de banco de capacitores deben cumplir la norma IEEE C37.99-2012.
Se debe incluir un sistema de protección multifunción que garantice la salida del banco antes
eventos de falla que ocasionen sobrecorrientes, sobrevoltajes, desbalance del neutro o pérdida
de fase.
Los IEDs de protección del banco de capacitores contarán como mínimo con las funciones de
protección presentadas en la tabla 6:
Descripción de funciones conforme a la norma ANSI
IED: Banco de capacitores
Función de protección Código ANSI
Sobrecorriente de fases (con contenido de armónicas) 50/51
Sobrecorriente de neutro 50N/51N
Bajo voltaje 27
Sobrevoltaje 59

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
48
Descripción de funciones conforme a la norma ANSI
IED: Banco de capacitores
Verificación de sincronismo 25
Falla Interruptor 50BF
Supervisión de bobinas de disparo 74 TC
Registro de fallas ----
Tabla 6 Funciones de protección de banco de capacitores conforme a la norma ANSI
Fuente: CELEC EP – TRANSELECTRIC. Especificaciones técnicas 500 kV Ref. B1024449
Los IEDs deben incluir además funciones de protección para fallas internas del banco sensibles:
Diferencial de voltaje
Desbalance de corriente
El sistema de protección del banco se complementa con fusibles externos, fusibles internos y
con el equipos de mando sincronizado.
6.6.7. Tablero de protección y control de bahía acoplador de barras
El tablero de control de la bahía de acoplador de barras (TCAB) deberá incluir un IED de control
de bahía, al menos un switch para comunicación con la red del SAS dependiendo de la
arquitectura presentada, distribuidores de fibra óptica (ODF) y demás elementos y materiales
necesarios para el control de los equipos de la bahía de acoplador de barras.
La función de control de bahía consistirá en hacer adquisición, monitoreo y control de las señales
de los diferentes equipos de la bahía de transferencia. Estas señales deberán incluir por lo menos
la siguiente información:
Estado de los dispositivos y equipos de maniobra:
- Abierto/cerrado,
- Bloqueado/desbloqueado,
- Local/remoto,
- entre otros
Alarmas de fallas mecánicas o eléctricas en equipos de maniobra (seccionadores e
interruptores)
Tensión en las tres fases de cada barra.
Frecuencia de cada barra.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
49
6.6.7.1. Protección de acople de barras
Los IEDs de protección del acople de barras contarán como mínimo con las funciones de
protección presentadas en la tabla 7:
Descripción de funciones conforme a la norma ANSI
IED : acople de barras
Función de protección Código ANSI
Sobrecorriente de fases 50/51
Sobrecorriente de neutro 50N/51N
Verificación de sincronismo 25
Falla interruptor 50BF
Supervisión de bobinas de disparo 74 TC
Registro de fallas ----
Tabla 7 Funciones de protección de acople de barras descritas conforme a la norma ANSI
Fuente: CELEC EP – TRANSELECTRIC. Especificaciones técnicas 500 kV Ref. B1024449
También se contará con las siguientes funciones para control y supervisión del interruptor del
acople de barras: funciones de supervisión del circuito de disparo (74) y disparo con bloqueo (86)
que podrán por dispositivos independientes.
6.6.8. Protección diferencial de barras
El sistema de protección diferencial de barras estará alojado en un tablero de protección
dedicado, si es una protección centralizada, o como un IED adicional en el tablero de control de
cada bahía, si se tiene una protección distribuida. La protección diferencial de barras debe incluir
lo siguiente:
Un IED de protección diferencial de barras por bahía y una unidad centralizada para un
esquema de doble barra con by-pass (87B).
Dispositivos independientes de disparo con bloqueo (86) que utilizaran 2 relés auxiliares
86B1 y 86B2, y relés auxiliares 86-BX por cada bahía.
Función de falla interruptor (50BF)
Para realizar la discriminación de la barra sana de la fallada, se debe implementar disparos
selectivos vía software o acondicionar el sistema de control para seleccionar la barra fallada.
Para esto se requiere que la protección disponga de entradas digitales para recibir la información
de estado de los equipos de cada bahía que se conecta a las barras de forma que el IED pueda
de manera automática considerar o no el aporte de corriente de cada bahía en el cálculo de la

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
50
corriente diferencial. En este sentido el sistema de protección de las barras deberá disponer de
entradas de corriente para cada una de las tres fases de cada bahía que se conecta a la barra a
ser protegida.
En el caso que el despeje de la barra no elimine los cortocircuitos, deberá poderse disparar la
segunda barra mediante lógicas de programación. El IED de protección diferencial de barras
deberá contar como mínimo con las funciones de protección presentadas en la tabla 8:
Descripción de funciones conforme a la norma ANSI
IED: protección de barras (PB1)
Función de protección Código ANSI
Diferencial porcentual de barras 87B-1
Falla interruptor 50BF
Tabla 8 Función de protección diferencial de barras descritas conforme a la norma ANSI
Fuente: CELEC EP – TRANSELECTRIC. Especificaciones técnicas 500 kV Ref. B1024449
6.7. Sistema de medición de energía
El sistema de medición de energía permite contabilizar la entrega o suministro de energía en los
diferentes puntos de medida disponibles y reportar las magnitudes a un sistema de medición que
permita hacer un análisis de calidad de la energía.
6.7.1. Características técnicas
Los medidores deben ser del tipo electrónico estar basados en microprocesadores, con la
suficiente capacidad de memoria para el almacenamiento de toda la programación, medidas de
corriente, voltaje, potencia y energía. Además contarán con funciones de autodiagnóstico y con
sistemas de respaldo de memoria en caso de pérdida del voltaje de alimentación. Debe tener un
display local, de tal manera que permita mostrar la información de las diferentes medidas
solicitadas. Se deberá indicar la dirección y el valor para las medidas de energía activa y reactiva.
Los medidores bidireccionales deberán estar equipados con dos registradores de lectura local
para energía de exportación e importación.
La clase de los medidores debe ser igual o mejor a 0.2s. Los núcleos de medida en
transformadores de corriente y transformadores de potencial deberán ser de la misma clase que
los medidores. El error porcentual total máximo (en módulo y fase), a factor de potencia 0,9
introducido en la medición de energía por la caída de voltaje no deberá superar el 0,1%. Debe
cumplir con lo establecido en la norma IEC 61000-4-7/4-15, la Norma IEC 62053-22 o la norma
equivalente ANSI. Los medidores de energía multifuncionales deben ser alimentados a 125 Vdc

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
51
y con circuitos independientes. Deberán contar con reloj de tiempo real cuya base de tiempo sea
independiente de la frecuencia de la red de 60 Hz y sea tomada directamente de la señal de GPS
de la subestación.
Si el sistema de alimentación falla por un tiempo menor o igual a 30 días calendario, los
medidores no deberán perder ninguna de la información registrada y almacenada en la memoria
de registro de datos. Por lo tanto, la memoria deberá contar con medios de respaldo de la
información con una vida en sitio superior a diez años y una capacidad de autonomía de mínimo
30 días continuos.
6.7.2. Parámetros y requisitos técnicos
Las características del sistema al cual serán conectados los medidores de energía son las
siguientes:
Trifásico a cuatro hilos.
Voltaje secundario de los transformadores de voltaje: 115/√3 V.
Frecuencia nominal: 60 Hz.
Los medidores de energía multifuncionales deben medir o calcular como mínimo los siguientes
parámetros, dentro de la clase de precisión garantizada:
Potencia trifásica activa, reactiva y aparente
Demanda (máxima/promedio) activa y reactiva
Factor de potencia
Corriente de fase
Voltaje de fase-fase y fase-neutro
Frecuencia del sistema
6.7.3. Comunicaciones y aspectos de diseño
Los medidores deberán contar con los siguientes puertos de comunicación:
Puerto Ethernet, para integración a la red de medidores.
Puerto IRIG-B que permita sincronización por GPS con resolución de 1 ms.
Puerto RS 485 que permita funciones de gestión.
Puerto óptico para conexión de un computador portátil
Cada uno de los medidores multifuncionales de energía debe estar compuesto como mínimo por
los siguientes elementos:
Módulos básicos: La fuente de alimentación, conversor análogo-digital, la unidad central de

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
52
proceso, los módulos de entrada salida, los módulos de comunicación y elementos
necesarios para su correcto funcionamiento. Las salidas de pulsos deberán estar
completamente cableadas a borneras.
Puertos de comunicaciones para la conexión a la red de medidores de energía, a los tableros
de control de unidad y al sistema de sincronización de tiempo.
Módulos de salida de pulsos (puerto óptico), con su respectivo LED para propósitos de
prueba y verificación de la precisión del medidor.
Interfaz local (IHM) conformada como mínimo por el teclado funcional para la programación
local y la selección de la información a ser presentada, el despliegue digital alfanumérico
para la visualización de las medidas y demás variables, la supervisión y programación de
parámetros, etc.
Un conjunto de elementos y accesorios requeridos para la instalación de sellos de seguridad
del medidor.
La adquisición de los datos de los medidores de energía se debe realizar a través de una red
independiente de la red del sistema de control. Los medidores se deberán conectar a la red de
medición a través de switches. Toda la información de los medidores se envía a la estación de
gestión de medición ubicada en la sala de control de la subestación. También podrá ser enviada
a los centros de control de CELEC EP - TRANSELECTRIC y el CENACE, a través del protocolo
DNP 3.0 ethernet u otros.
6.8. Registrador digital de fallas (DFRs)
El registrador digital de fallas (DFR) o registrador automático de perturbaciones (RAP) es un
equipo que permite detectar y registrar digitalmente los datos relacionados con eventos ocurridos
antes, durante y después de cualquier perturbación o falla, así como cualquier cambio que ocurra
en el sistema eléctrico y haya sido detectado por los circuitos de arranque del DFR. El sistema
de los DFRs debe cumplir con los siguientes aspectos:
Análisis rápido de fallas y su localización para las bahías y barrajes de la subestación.
Obtención de valores calculados de corrientes y voltajes de secuencia positiva, negativa y
cero.
Registro de transitorios de corta duración.
Registro de disturbios lentos, de larga duración.
Registro por violación de limites ajustados
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
53
6.8.1. Características generales
Los registradores automáticos de perturbaciones deben permitir el análisis rápido de fallas y su
localización para bahías de línea (distancia a la falla), autotransformador y reactor de barras.
Además deben contar con memoria del tipo flash - EPROM, con el fin de que todos los ajustes
de parámetros permanezcan en memoria ante fallas de alimentación. La memoria deberá poder
almacenar los últimos 20 eventos registrados con una velocidad de muestreo de 256 muestras
por ciclo con una duración de hasta 3 segundos. Los registradores deberán mostrar como mínimo
por cada bahía: la hora, fecha, las cuatro señales analógicas de voltaje, cuatro señales
analógicas de corriente y hasta 20 señales digitales.
Para la marcación en tiempo real de los eventos se deberá tomar la señal del reloj sincronizado
por satélite GPS, cuya base de tiempo sea independiente de la frecuencia de la red de 60 Hz y
deberá garantizar la precisión requerida (1 ms), para el registro secuencial de eventos, a través
de protocolo IRIG B de alta precisión o PTP IEEE1588.
Los DFRs deben contar con los puertos ópticos de comunicación redundantes PRP y demás
accesorios de comunicaciones para su red independiente y su conexión con la unidad de
almacenamiento y análisis exclusiva para DFRs, la cual debe poseer una tarjeta de red ethernet
independiente para su gestión remota. Además deben contar con autosupervisión,
autodiagnóstico y un nivel de seguridad para evitar el acceso de personal no autorizado.
En la figura 9 se presenta la arquitectura de comunicaciones de los DFRs, que debe estar
constituida de preferencia por una unidad central de procesamiento y por unidades de adquisición
distribuidas unidas por enlaces de fibra óptica.

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
54
Figura 9 Arquitectura conceptual del sistema de DFRs
Fuente: CELEC EP – TRANSELECTRIC. Manual de especificaciones técnicas para DFRs
Para los registradores automáticos de perturbaciones se debe utilizar archivos en formato
COMTRADE (Common format for transient data exchange) como lo especifica la norma IEEE
C37.111 o en su defecto, se deberá proveer el software que haga la transcripción del formato del
DFR al formato COMTRADE, para cumplir con las respectivas normas equivalentes ANSI. El
sistema de DFRs deberá acogerse a lo indicado a la normativa vigente.
6.8.2. Características de hardware y software
La estación de gestión de DFRs o unidad de almacenamiento es un computador de tipo industrial
que puede estar instalado en uno de los tableros donde se ubican los DFRs. El acceso a la
información almacenada se debe poder realizar de forma remota o desde un computador portátil
conectado a la red.
La unidad de almacenamiento debe capturar y concentrar en una base de datos los registros
enviados por cada uno de los DFRs, en forma automática (sin intervención de un operario). A
través de esta estación deberá poderse controlar cada uno de los registradores y obtener la
configuración actual de los mismos con la posibilidad de realizar modificaciones.
Para realizar la supervisión y gestión del sistema de DFRs se debe implementar una red
independiente de comunicaciones. El sistema de registro de fallas debe permitir realizar las
siguientes funciones:

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
55
Supervisión automática de todos los DFRs.
Función de PDC local
Almacenar y administrar información mediante registros históricos.
Configuración de cambios de ajuste de parámetros.
Presentar reportes de los registros de eventos.
Facilitar el análisis oscilográfico de fallas y el acceso por solicitud del operador de la
subestación.
Presentar medidas de corrientes, voltajes y potencia dentro de un ambiente unificado,
amigable y flexible.
Las características básicas del software para obtención, transmisión y evaluación de datos de
cada DFRs son:
La adquisición y presentación de variables de estado.
La adquisición de señales analógicas.
La adquisición de señales digitales.
Registrador de Fallas de cada bahía de la subestación.
Registro de transitorios de muy corta duración.
Registro de disturbios lentos, de larga duración.
Unidad de Medición Fasorial PMU
Localización de fallas en líneas de transmisión, en el equipo local y disponible para envío
remoto.
La gestión de datos históricos y evaluación gráfica de fácil manejo con representación
simultanea de varios registros oscilográficos procedentes también de otros DFRs.
La exportación e importación de datos según lo establecido en la norma IEEE C37.111
(COMTRADE), a fin de poder transferir las incidencias de fallas almacenadas de cada
módulo DFR en otro aparato o sistema de otros fabricantes.
Diagnosticar de manera remota el estado de los DFRs, el GPS y el sistema de
comunicaciones. Configurar diversos tipos de usuarios y códigos de contraseña que permitan
el acceso a datos, a recibir registros y a la modificación de parámetros.
6.8.3. Registros mínimos
Para cada línea de transmisión, autotransformador o reactor se registrarán:
Señales análogas de:
- Corriente de cada fase
- Corriente residual o de neutro
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
56
- Voltaje de cada fase y neutro
Nota:
Para bahía acoplador se tiene 8 voltajes (voltajes de 2 barras) y 4 corrientes (fases y neutro).
Para bahía de línea se tiene 4 voltajes y 4 corrientes (3 fases y neutro del TC).
Para bahía de transformador se tiene14 corrientes (3 fases y neutro de los TCs de alta, baja
y terciario, además fase y neutro del TC de tierra).
Señales de eventos para registro de:
- Estado del interruptor de potencia
- Operación de protecciones principales (de barras en case de bahía acoplador)
- Operación de protecciones de respaldo
- Recepción – Transmisión de disparo transferido (en el caso de las líneas)
- Recepción – Transmisión de disparo directo (en el caso de las líneas)
El número de entradas digitales será definida por la especificación técnica de acuerdo al diseño
propuesto.
Nota: los DFR pueden adquirir la información digital desde los IEDs de protección mediante
mensajes GOOSE, por lo tanto debe considerarse el diseño de la red ethernet, utilizando VLANs.
7. Referencias
Para el diseño y pruebas de los equipos de protección y control, las siguientes normas deben ser
aplicables:
Código del documento o norma
Nombre del documento o norma
MAN-DIS-03 – CELEC
EP. Transelectric
Manual de especificaciones técnicas para sistemas de
automatización de subestaciones
Regulación No.
ARCONEL – 001/16
Sistema de medición comercial -SISMEC- del sector Eléctrico
Ecuatoriano
Regulación No.
ARCONEL – 003/16
Requerimientos para la supervisión y control en tiempo real del
Sistema Nacional Interconectado
IEC 60038 Standard voltages (voltajes estándar)
IEC 60068 Environmental testing (pruebas ambientales)

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
57
Código del documento o norma
Nombre del documento o norma
IEC 60255-21-1
IEC 60255-21-2
IEC 60255-21-3
Electrical relays: vibration, shock, bump and seismic tests on
measuring relays and protection equipment (relés eléctricos:
pruebas de vibración, sísmicas y de choque en equipos de
medición y relés de protección)
IEC 60255-22-2 Measuring relays and protection equipment – part 22-2: electrical
disturbance tests – electrostatic discharge tests (equipos de
medición y relés de protección– parte 22-2: pruebas de
perturbaciones eléctricas – descargas electrostáticas)
IEC 60255-22-4 Measuring relays and protection equipment – part 22-4: electrical
disturbance tests – electrical fast transient/burst immunity test
(equipos de medición y relés de protección – parte 22-4: pruebas
de perturbaciones eléctricas – inmunidad a transitorios rápidos –
ráfagas)
IEC 60255-22-5 Measuring relays and protection equipment – part 22-5: electrical
disturbance tests – surge immunity test (equipos de medición y
relés de protección – parte 22-5: pruebas de perturbaciones
eléctricas – inmunidad a sobretensiones)
IEC 60255-26 Measuring relays and protection equipment - part 26:
electromagnetic compatibility requirements (equipos de medición y
relés de protección – parte 26: requerimientos de compatibilidad
electromagnética)
IEC 60255-27 Measuring relays and protection equipment - part 27: product
safety requierements (equipos de medición y relés de protección –
parte 27: requerimientos de seguridad del producto)
IEC 60297-3 Mechanical structures for electrical and electronic equipment -
dimensions of mechanical structures of the 19 in series (estructuras
mecánicas para equipos electrónicos - dimensiones de las
estructuras mecánicas de la serie 19 pulgadas)
IEC 60529 Degrees of protection provided by enclosures - IP code (grados de
protección proporcionados por envolventes - código IP)
IEC 60664 Insulation coordination for equipment within low-voltage systems
(coordinación de aislamiento en equipos de baja tensión)

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
58
Código del documento o norma
Nombre del documento o norma
IEC 60793-1-1 Optical fibres - part 1-1: Measurement methods and test
procedures (fibra óptica – parte 1-1: métodos de medición y
procedimiento de pruebas)
IEC 60794-1-1 Optical fibre cables - part 1-1: generic specification (cables de fibra
óptica – parte 1-1: especificación genérica)
IEC 60794-1-3 Optical fibre cables - part 1-3: optical cable elements (cables de
fibra óptica – parte 1-3: elementos del cable de fibra óptica)
IEC 60870-3 Telecontrol equipment and systems. – interfaces - electrical
characteristics (equipamiento y sistemas de telecontrol – interfaces
- características eléctricas)
IEC 60870-4 Telecontrol equipment and systems – performance requirements
(equipamiento y sistemas de telecontrol – requerimientos de
rendimiento)
IEC 60870-5-101 Telecontrol equipment and systems - part 5-101 transmission
protocols- companion standard for basic telecontrol task (equipos
y sistemas de telecontrol - parte 5 -101 protocolos de transmisión -
estándar complementario para tareas básicas de telecontrol)
IEC 60870-5-104 Telecontrol equipment and systems - part 5-104 transmission
protocols- companion standard for basic telecontrol task (equipos
y sistemas de telecontrol - parte 5 -104 protocolos de transmisión -
estándar complementario para tareas básicas de telecontrol)
IEC 60874 Connectors for optical fibres and cables (conectores para fibras
ópticas y cables)
IEC 61000-1-1 Electromagnetic compatibility – EMC (compatibilidad
electromagnética –EMC)
IEC 61010-1 Safety requirements for electrical equipment for measurement,
control and laboratory use (requisitos de seguridad de equipos
eléctricos de medida, control y uso en laboratorio)
IEC 61131-1 Standard for programmable controllers (estándar para
controladores programables)
IEC 61508-1 Functional safety of electrical/electronic/programmable electronic
safety-related (seguridad funcional de los sistemas
eléctricos/electrónicos/electrónicos programables relacionados
con la seguridad)

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
59
Código del documento o norma
Nombre del documento o norma
IEC 61850 Ed.1 Standard for the design of electrical substation automation
(estándar para el diseño de sistemas de automatización para
subestaciones)
IEC 61850 Ed.2 Communication networks and systems for power utility automation
(redes y sistemas de comunicación para automatización en
empresas de energía)
IEC 62439-1 Industrial communication networks - high availability automation
networks - part 1: general concepts and calculation methods (redes
de comunicación industrial – redes de automatización de alta
disponibilidad – parte 1: conceptos generales y métodos de
cálculo)
IEC 62439-3 Industrial communication networks - high availability automation
networks - part 3: parallel redundancy protocol (PRP) and high-
availability seamless redundancy (HSR) (redes de comunicación
industrial – redes de automatización de alta disponibilidad – parte
3: protocolo de redundancia en paralelo (PRP) y redundancia
transparente de alta disponibilidad (HSR))
ANSI/ISA S5.1 Instrumentation symbols and identification (identificación y
simbología para la instrumentación)
EN 50081-2 Electromagnetic compatibility - generic emission standard
(compatibilidad electromagnética - emisiones en ambiente
industrial)
EN 50082-2 Electromagnetic compatibility - generic immunity standard
(compatibilidad electromagnética – inmunidad en ambiente
industrial)
ITU-T G.651 Characteristics of a 50/125 µm multimode graded index optical fibre
cable (características del cable de fibra óptica multimodo de índice
gradual 50/125 µm)
ANSI/IEEE C37.90 IEEE standard for relays and relay systems associated with electric
power apparatus (estándar para sistemas de relés asociados con
aparatos de energía eléctrica)
IEEE C37.111 IEEE standard for measuring relays and protection equipment –
part 24: common format for transient data exchange (COMTRADE)
for power systems (equipos de medida y relés de protección - parte
Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
60
Código del documento o norma
Nombre del documento o norma
24: formato común para el intercambio de datos de transitorios en
sistemas de potencia COMTRADE)
IEEE 802.1w IEEE standards for rapid reconfiguration of spanning tree (estándar
IEEE para RSTP)
IEEE 1588 IEEE Standard for a precision clock synchronization protocol for
networked measurement and control systems (protocolo de
sincronización de precisión de tiempo en red para sistemas de
control y medición)
IEEE 1613 Standard environmental and testing requirements for
communications networking devices in electric power substations
(requerimientos ambientales y pruebas para dispositivos de redes
de comunicaciones en subestaciones de energía eléctrica)
8. Anexos
Código Nombre Ubicación Tiempo de retención
A1.G.01.PAV.02.01.01
Anexo 1:
Arquitectura del sistema de
control 230/138 kV
Departamento de
diseño de
subestaciones
Permanente
A2.G.01.PAV.02.01.01
Anexo 2:
Diagramas de principio
subestaciones 230/138 kV
Departamento de
diseño de
subestaciones
Permanente
9. Historial de cambios
No. Versión Fecha Cambios
1 21/06/2017 Documento original

Guía de conceptos, características y funciones de los sistemas
de automatización de subestaciones
_____________________________________________________________________
61
Anexo 1: Arquitectura del sistema de control de una subestación
230/138 kV
Código: A1.G.01.PAV.02.01.01
Este anexo, cuyo detalle se adjunta en formato PDF, contiene el plano de la arquitectura del
sistema de control SAS de una subestación 230/138 kV, detallado de la siguiente manera:
1 Arquitectura del sistema de control SAS – Subestación 230 /138 kV
2 Arquitectura del sistema de control SAS – Casa de control principal
3 Arquitectura del sistema de control SAS – Caseta patio 230 kV
4 Arquitectura del sistema de control SAS – Caseta patio 138 kV
Anexo 2: Diagramas de principio subestaciones 230/138 kV
Código: A2.G.01.PAV.02.01.01
Este anexo contiene los planos de diagramas lógicos o de principio considerados para
subestaciones nuevas con esquemas de doble barra para los niveles de voltaje 230/138 kV y
barra principal y transferencia para 138 kV. Los diagramas de principio, en conjunto con el
diagrama unifilar de protecciones, control y medición son los documentos descriptivos del
sistema que forman parte de la ingeniería básica.
Los diagramas se agrupan por tipo de bahía (línea, autotransformador, acople o transferencia)
en cada nivel de voltaje de la siguiente manera:
Apéndice 1: Bahías 138 kV
1.1 Diagramas de principio bahía de línea 138 kV
1.2 Diagramas de principio bahía autotransformador 138 kV
1.3 Diagramas de principio bahía transferencia 138 kV
Apéndice 2: Bahías 230 kV
2.1 Diagramas de principio bahía de línea 230 kV
2.2 Diagramas de principio bahía autotransformador 230 kV
2.3 Diagramas de principio bahía de acople 230 kV
Los apéndices mencionados se adjuntan en formato PDF.