criterios de estabilidad controles automáticos
TRANSCRIPT

Instituto Universitario “Santiago Mariño” Controles Automáticos Escuela 46 Ingeniera en Mantenimiento Mecánico
CRITERIOS DE ESTABILIDAD
Caracas, julio de 2016
Deivis E. Montilla
Teorema de Routh–Hürwitz
Criterio de Bode
Análisis en el dominio de la frecuencia
Criterio de estabilidad de Nyquist
Sintonización de controladores
Método de relación de amortiguamiento de ¼ por
ganancia últimas

El teorema de Routh–Hürwitz sirve para analizar la estabilidad de los sistemas dinámicos.
Básicamente, el teorema proporciona un criterio capaz de determinar en cuál semiplano (izquierdo o derecho) del plano
complejo están localizadas las raíces del denominador de la función de transferencia de un sistema; y en consecuencia, conocer si
dicho sistema es estable o no. Si tras aplicar el criterio nos da como resultado que todos los polos están en el semiplano izquierdo, el
sistema es estable, y si hay un mínimo de un polo en el semiplano derecho, el sistema es inestable.
El criterio se refiere a la función de transferencia en lazo cerrado del sistema. Para aplicar el criterio a un sistema descrito por su
función de transferencia en lazo abierto, hay que incluir la realimentación haciendo:
El criterio de Routh-Hurwitz también se utiliza para el trazado del lugar de las raíces. En este caso, dicho procedimiento de análisis
estudia la función de transferencia del sistema en bucle abierto 1+K·Gba(s)=0 (siendo K la ganancia variable del sistema). Su objetivo
es determinar los puntos de corte del LdR con el eje imaginario. Dichos puntos marcan el límite de estabilidad del sistema, dicho en
otras palabras, determinan el límite en el que los polos del sistema en bucle cerrado pasan al semiplano derecho complejo y por lo
tanto el sistema se vuelve inestable. Como es evidente, tras la aplicación del criterio de Routh-Hurwitz, los resultados obtenidos
quedarán en función de la ganancia K, lo cual nos indicará a partir de qué valores de K el sistema pasará de estable a inestable
(ganancia K límite).

Dado:
El número de cambios de signo de: an, an-1, α1, β1, …, γ1, δ1 (primera columna resultante del criterio de Routh – Hürwitz),
nos da la cantidad de elementos que están en el semiplano derecho. Si todos los elementos tienen el mismo signo, el
sistema será asintóticamente estable, en cambio, si encontramos cambios de signo, el sistema será asintóticamente
inestable. Como está indicado arriba, tendremos tantos polos en el semiplano positivo como variaciones de signo en la
primera columna.
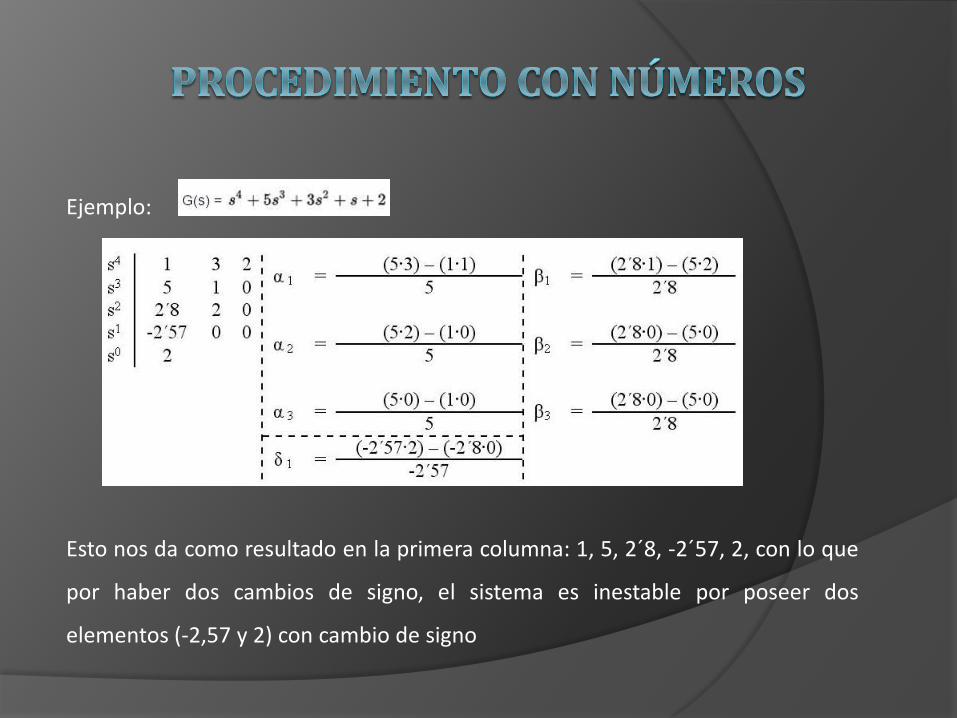
Ejemplo:
Esto nos da como resultado en la primera columna: 1, 5, 2´8, -2´57, 2, con lo que
por haber dos cambios de signo, el sistema es inestable por poseer dos
elementos (-2,57 y 2) con cambio de signo

Considere el sistema de la figura. Determine el rango de valores de K para la estabilidad. La función de transferencia en lazo cerrado es
La ecuación característica es
El arreglo de coeficientes se convierte en
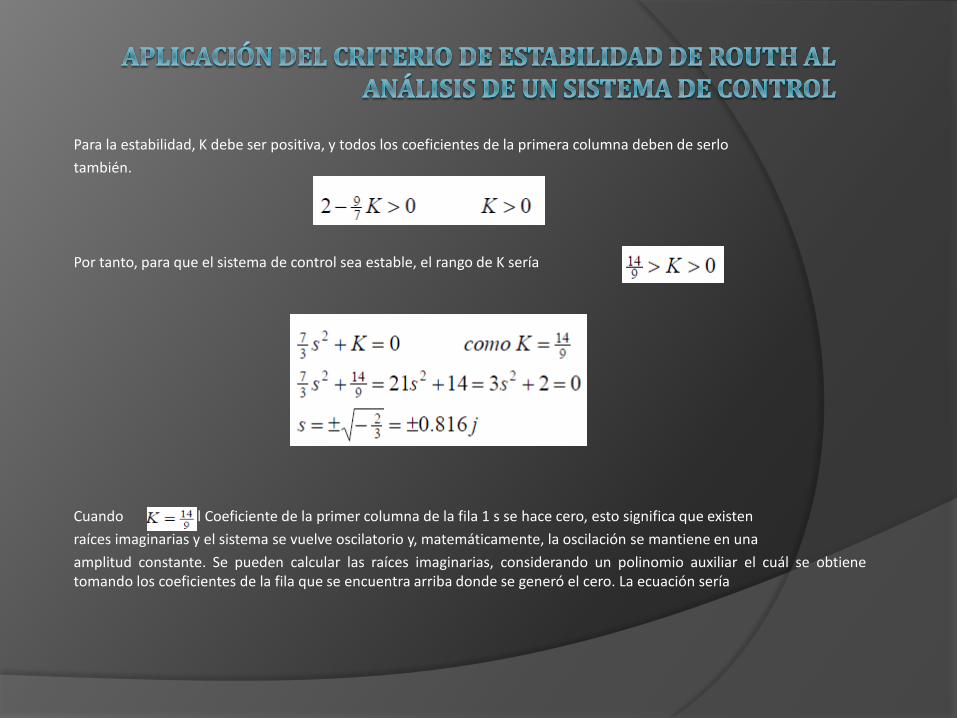
Para la estabilidad, K debe ser positiva, y todos los coeficientes de la primera columna deben de serlo
también.
Por tanto, para que el sistema de control sea estable, el rango de K sería
Cuando , el Coeficiente de la primer columna de la fila 1 s se hace cero, esto significa que existen
raíces imaginarias y el sistema se vuelve oscilatorio y, matemáticamente, la oscilación se mantiene en una
amplitud constante. Se pueden calcular las raíces imaginarias, considerando un polinomio auxiliar el cuál se obtiene tomando los coeficientes de la fila que se encuentra arriba donde se generó el cero. La ecuación sería

Ejemplo1 :
Si el término de la primera columna de cualquier renglón es cero, pero los términos restantes no son cero, o no hay términos restantes, el término cero se sustituye con un número positivo muy pequeño e y se evalúa el resto del arreglo.
Considere la ecuación
El arreglo de coeficientes es
Si el signo del coeficiente que está encima del cero (e ) es igual al signo que está abajo de él, quiere decir que hay un par de raíces imaginarias.
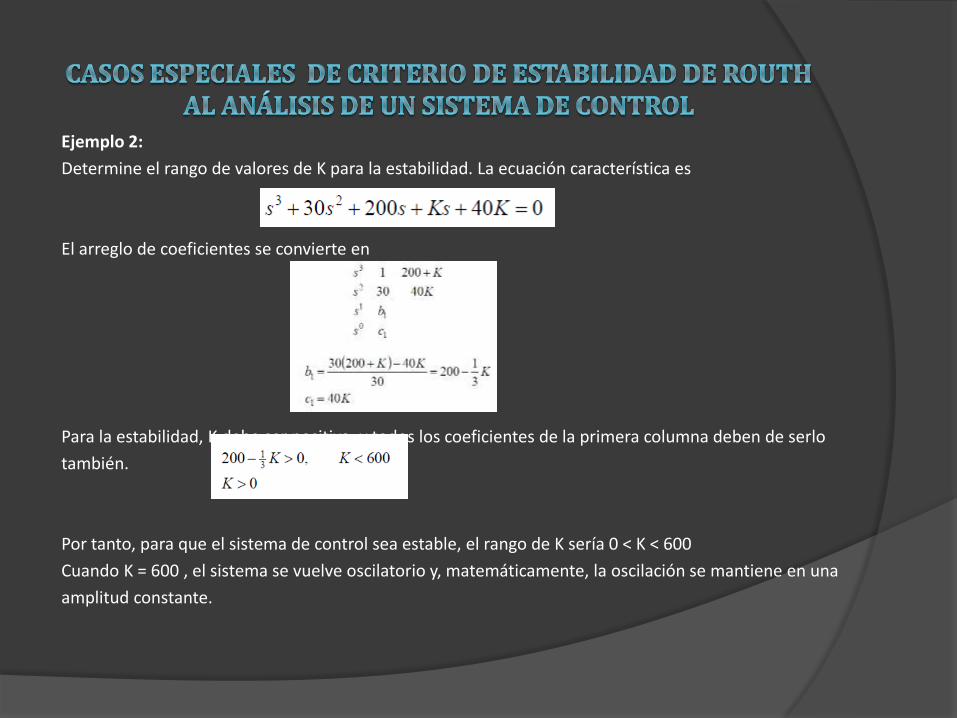
Ejemplo 2:
Determine el rango de valores de K para la estabilidad. La ecuación característica es
El arreglo de coeficientes se convierte en
Para la estabilidad, K debe ser positiva, y todos los coeficientes de la primera columna deben de serlo
también.
Por tanto, para que el sistema de control sea estable, el rango de K sería 0 < K < 600
Cuando K = 600 , el sistema se vuelve oscilatorio y, matemáticamente, la oscilación se mantiene en una
amplitud constante.

Ejemplo 3:
Determine la estabilidad para siguiente sistema La ecuación característica esen
El arreglo de coeficientes se convierte en
Como el signo arriba y abajo de e son diferentes, existen dos cambios de signo en los coeficientes de la primera columna, hay dos raíces con parte real positiva, el sistema es inestable

Diagrama de Bode es una representación gráfica que sirve para caracterizar la respuesta en frecuencia de un sistema.
Normalmente consta de dos gráficas separadas, una que corresponde con la magnitud de dicha función y otra que
corresponde con la fase. Recibe su nombre del científico estadounidense que lo desarrolló, Hendrik Wade Bode
(ingeniero, investigador, inventor, de descendencia neerlandesa. Como pionero de teoría de control moderna y
telecomunicaciones electrónicas, él revolucionó el contenido y metodología de sus campos de investigación).
La técnica de representación de Bode permite hacer gráficas rápidamente y con una precisión que es suficiente para el
diseño de sistemas de control. La primera idea es graficar las curvas de magnitud empleando una escala logarítmica y
las curvas de fase empleando una escala lineal. Esto permite graficar plantas cuyas funciones de transferencia son de
alto orden mediante la adición gráfica simple de los términos separados.
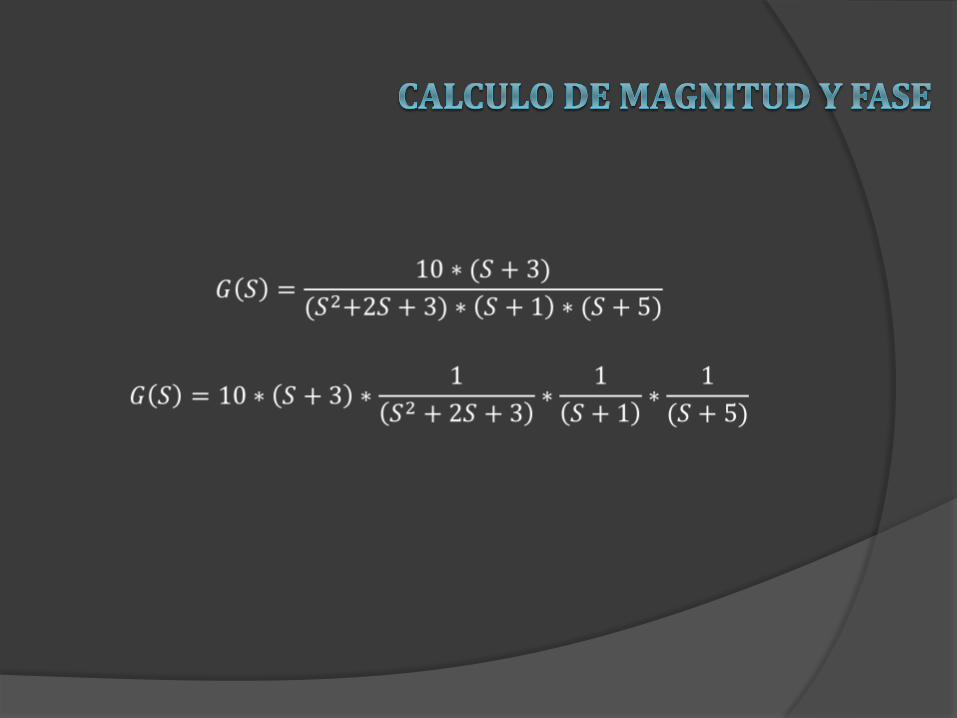
Esto es así porque una expresión compleja con factores de ceros y polos se puede escribir como:
Operando llegamos a la expresión siguiente:
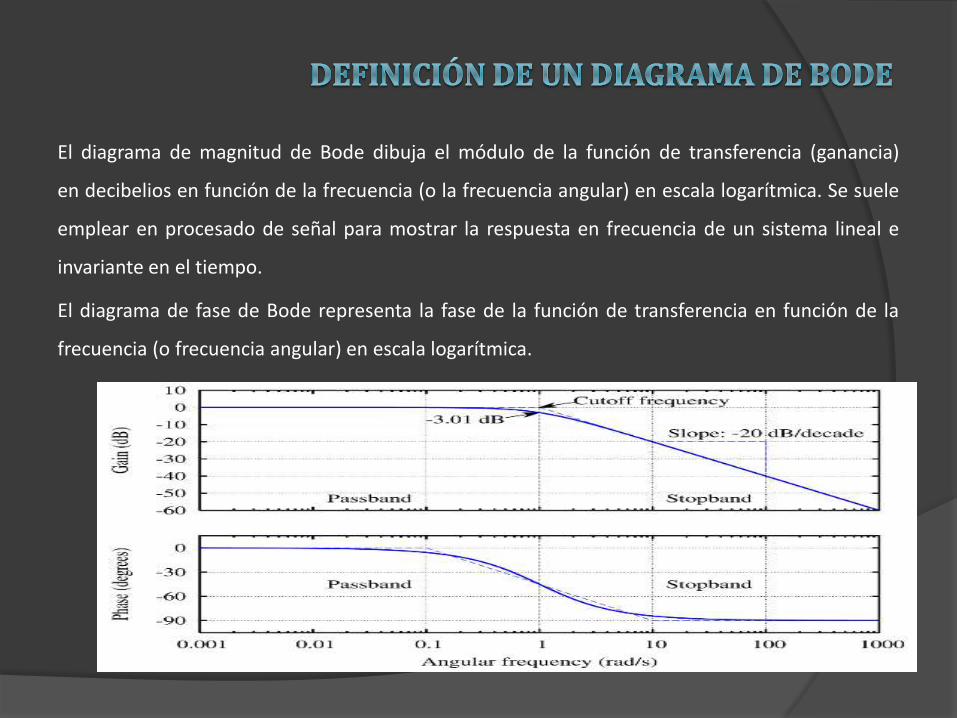
El diagrama de magnitud de Bode dibuja el módulo de la función de transferencia (ganancia)
en decibelios en función de la frecuencia (o la frecuencia angular) en escala logarítmica. Se suele
emplear en procesado de señal para mostrar la respuesta en frecuencia de un sistema lineal e
invariante en el tiempo.
El diagrama de fase de Bode representa la fase de la función de transferencia en función de la
frecuencia (o frecuencia angular) en escala logarítmica.

𝐺(𝑆) → 𝐺(𝑗𝑤)
𝐺 𝑗𝑤 =𝑁𝑢𝑚
𝐷𝑒𝑛
𝐺 𝑗𝑤 → 𝐺 𝑗𝑤 → ∠𝐺 𝑗𝑤
𝐺 𝑗𝑤 =|𝑁𝑢𝑚|
|𝐷𝑒𝑛|→ 𝐺 𝑗𝑤 = 20 log10(|𝐺(𝑗𝑤)|)
∠𝐺 𝑗𝑤 = ∠𝑁𝑢𝑚 − ∠𝐷𝑒𝑛

𝐺 𝑆 = 3
𝐺 𝑗𝑤 = 3
𝐺 𝑗𝑤 = 20 log10 3 = 9.542𝑑𝐵
∠𝐺 𝑗𝑤 = 0

𝐺 𝑆 =1
𝑆
𝐺 𝑗𝑤 =1
𝑗𝑤
𝐺 𝑗𝑤 = 20 log101
𝑤
∠𝐺 𝑗𝑤 = 0 − 90° = −90°

𝐺 𝑆 = 𝑆
𝐺 𝑗𝑤 = 𝑗𝑤
𝐺 𝑗𝑤 = 20 log10 𝑤
∠𝐺 𝑗𝑤 = 90°

El análisis en el dominio de la frecuencia es un herramienta clásica en la teoría de control, si bien en general los sistemas que varían con una periodicidad definida no suelen ser los más comunes en la ingeniería de procesos. En la actualidad, con el desarrollo de herramientas computacionales la simulación en el dominio del tiempo es mucho más sencilla y en consecuencia este tipo de análisis ha perdido algo de importancia práctica. No obstante sigue teniendo un valor conceptual y una sencillez en la comprensión intuitiva muy importantes. Veremos entonces algunos elementos muy primarios, como para tener un primera aproximación. Sea G(s) la función de transferencia de un sistema lineal al que se le aplica una señal de entrada que varía sinusoidalmente con el tiempo, x(t) = A sin t . Por lo tanto la respuesta estará dada por
Si las raíces de la ecuación característica del sistema son distintas se podrá realizar la siguiente expansión:
Y por lo tanto la respuesta en el dominio del tiempo será

Al diseñar un sistema de control es necesario que sea estable y que tenga una estabilidad relativa
adecuada. En esta sección demostraremos que la traza de Nyquist no solo indica si un sistema es
estable sino también el grado de estabilidad de un sistema estable
Un sistema de control de retroalimentación simple como el mostrado en la figura 1, es estable si su
Ecuación Característica a Lazo Cerrado, F(s) = 1 + G(s)H(s), no tiene ninguna raíz con parte real positiva.

El criterio de estabilidad de Nyquist relaciona la respuesta frecuencial a lazo abierto con la estabilidad a lazo cerrado;
basado en un teorema de la variable compleja que se fundamenta en el mapeo de los contornos en el plano
complejo. Parte de los fundamentos que dan base al criterio de estabilidad se nombrarán a continuación.
• Para una trayectoria cerrada y continua en el plano S, que no pasa por ninguna singularidad, le corresponde
una trayectoria cerrada en el plano F(s).
• Si el contorno en el plano S (Γs ), encierra igual número de ceros que polos de F(s), el contorno en F(s), (ΓF
(s) ), no encerrará el origen.
• Si el Γs encierra n polos de F(s), ΓF (s) rodea al origen n-veces en sentido anti horario.
• Si el Γs encierra m ceros de F(s), ΓF (s) rodea al origen m-veces en sentido horario

Para la implementación de un lazo de control consiste en ajustar los parámetros del controlador. Si el controlador puede ser ajustado
para dar una respuesta satisfactoria, se presume que el lazo de control ha sido bien diseñado. Cuando el controlador no puede ajustarse
satisfactoriamente, debe revisarse la selección de los demás componentes del lazo de control.
Generalmente existen varias consideraciones que se toma en cuenta para evaluar la respuesta de un lazo de control frente a una
perturbación:
• La variable controlada deberá alcanzar su valor deseado tan rápidamente como sea posible.
• La respuesta de la variable controlada no debería ser muy oscilatoria.
• La variable manipulada no debería estar sometida a grandes cambios, ya que frecuentemente afecta a otras partes del proceso.
Los métodos de ajuste de controladores se clasifican en dos grandes grupos: métodos de lazo cerrado, y métodos de lazo abierto. Los
primeros se aplican con el controlador en automático; los segundos con el controlador en manual. Los parámetros obtenidos por estos
métodos, son parámetros iniciales, para obtener los parámetros adecuados se pueden utilizar los criterios de error de integración.

1. MÉTODO DE LAZO CERRADO O ULTIMA GANANCIA (MÉTODO DE ZIEGLER-NICHOLS)
Este método es el pionero en la sintonización de controladores, es conocido por método de lazo cerrado o sintonización en línea, fue
propuesto por Ziegler y Nichols en 1942 y se sigue usando hoy en día.
Este método tiene como objetivo ajustar el controlador para una curva de respuesta con una razón de amortiguamiento igual a ¼. Este
método se basa en encontrar la ganancia de un controlador de tipo proporcional con la finalidad de que el lazo oscile indefinidamente a
una amplitud constante. Esta es la máxima ganancia para la cual el lazo es estable.
2. MÉTODO A LAZO ABIERTO O CURVA DE REACCIÓN
Como su nombre lo indica, estos métodos se utilizan en lazo abierto, colocando el controlador en manual. Los datos requeridos para el
ajuste se obtienen mediante la prueba de escalón que proporciona una curva de reacción como respuesta. Estos datos son los parámetros
de K, τ, to, obtenidos bien sea de un sistema de primer orden más tiempo muerto (POMTM), o de un Sistema de Segundo Orden más
Tiempo Muerto (SOMTM).
Este método se aplica de la siguiente manera:
1. Colocar el controlador en manual, y esperar que el proceso se estabilice.
2. Realizar un cambio escalón en la señal de salida del controlador (posición de la válvula).
3. Registrar la curva de respuesta del proceso.

3. Método de Ziegler-Nichols a Lazo Abierto
Además de las fórmulas de sintonización en lazo cerrado, Ziegler y Nichols en 1942 proponen un conjunto de ecuaciones basadas en los
parámetros de un modelo de Primer Orden más Tiempo Muerto (POMTM) encontrados a partir de la curva de reacción. Al igual que en el
método de lazo cerrado, con los ajustes encontrados al aplicar este método, se intenta obtener una curva de respuesta de lazo cerrado
que tenga una razón de amortiguamiento igual a ¼. A partir de la tabla 3.2, se pueden determinan los coeficientes de ajuste a partir de los
valores de K, to y τ
4. Método de Dahlin
Como se vio anteriormente, y utilizando el método de la curva de reacción, se puede obtener los parámetros de la función de
transferencia: τ es la constante de tiempo de la respuesta del proceso, to es el tiempo muerto, y K es la ganancia del proceso. Dahlin
propone unos parámetros de ajuste de controladores de acuerdo al tipo de proceso al cual se le introducirá el controlador.

Este método fue propuesto por Ziegler y Nichols en 1942. Consistia en 2 pasos:
1. Determinar las características del lazo de control.
2. Estimación de los parámetros del controlador que producen la respuesta deseada para las características
determinadas en el primer paso.
En este método las características del proceso son representadas por la última ganancia de un controlador
proporcional y el último período de oscilación del lazo.

Estos parámetros pueden ser calculados si se conoce la función de transferencia de la planta, pero como usualmente
no es así, se realizan los siguientes pasos:
1. Desactivar los modos integral y derivativos del control realimentado, de tal manera que quede el control
proporcional. Si no puede ser desactivado el modo integral, se le puede colocar el tiempo integral en su valor
máximo.
2. Con el controlador en automático se aumenta la ganancia proporcional (o se reduce la banda proporcional) hasta
que la respuesta oscile con amplitud constante. La ganancia con la que se logró es Kcu y se conoce como última
ganancia.
3. El período Tu registrado en esa oscilación es conocido como último período.
Para la respuesta deseada Ziegler y Nichols especificaron un amortiguamiento de ¼ entre los picos de oscilaciones
continuas.
Una vez obtenida la última ganancia y período se emplea la siguiente tabla para calcular los parámetros de
entonamiento del controlador para producir la relación de amortiguamiento de ¼.

Controles Automáticos
Criterios de Estabilidad
http://saia.psm.edu.ve/moodle/mod/folder/view.php?id=642198