conjetura de kneser y aplicaciones de la topología …resumen la conjetura de martin kneser ,y...
TRANSCRIPT
Conjetura de Kneser y aplicaciones de la topología
algebraica a combinatoria
Rodolfo Alexander Quintero Ospina
Junio 2013

Índice general
Preliminares 1Notación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
0. Complejos simpliciales y Topología 20.1. Complejos simpliciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
0.1.1. Independencia afín . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20.1.2. Simplejos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20.1.3. Complejos simpliciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30.1.4. Triangulación de espacios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30.1.5. Complejos simpliciales abstractos . . . . . . . . . . . . . . . . . . . . . . . . . 5
0.2. Topología [Hat] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60.2.1. Grupo Fudamental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60.2.2. Espacios recubridores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80.2.3. Teorema de Borsuk-Ulam para dimensión dos . . . . . . . . . . . . . . . . . . 100.2.4. CW-complejos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
0.3. Homología . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110.3.1. Homología singular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110.3.2. Grupos de homología relativa . . . . . . . . . . . . . . . . . . . . . . . . . . . 120.3.3. Ejemplos importantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130.3.4. Prueba del teorema de Borsuk-Ulam . . . . . . . . . . . . . . . . . . . . . . . 13
1. Conjetura de Kneser 161.1. El problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.1.1. Uso del teorema de Borsuk-Ulam . . . . . . . . . . . . . . . . . . . . . . . . . 171.1.2. La solución de Greene . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.1.3. La idea de Bárány . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2. El índice Z2 232.1. Joins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.2. Espacios-Z2 y funciones-Z2 o equivariantes . . . . . . . . . . . . . . . . . . . . . . . . 252.3. El índice Z2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1
2.4. Joins borrados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2

Resumen
La conjetura de Martin Kneser y, posteriormente, la prueba de la misma por László Lovász,fueron acaso los mayores incentivos para prestar seria atención a las aplicaciones de la topología (enparticular, la algebraica) en combinatoria.
Desde un punto de vista combinatorio, si consideramos la familia de todos los k-subconjuntosde un conjunto de n elementos, podemos particionar tal familia en n−2k+2 clases C1∪ . . .∪Cn−2k+2
tales que ninguna pareja de k-subconjuntos dentro de una misma clase es disyunta. La conjetura deKneser a�rmaba que no era posible particionar la familia en n−2k+1 clases y que tuvieran la mismapropiedad anterior. Veinte años después de haber sido formulada László Lovász probó la conjeturausando el teorema de Borsuk-Ulam.
El objetivo fundamental del presente texto es mostrar al menos dos pruebas de la conjetura,una la dio Imre Bárány en 1978 y, la otra, Joshua Greene, a principios del siglo XXI. Asimismo,veremos que ambas demostraciones usan fuertemente el conocido teorema de Borsuk-Ulam; por ello,esbozaremos una prueba del mismo.
Por último, expondremos algunas de las herramientas topológicas desarrolladas posteriormentea la prueba de la conjetura de Kneser y que han permitido entender y dilucidar cuestiones combi-natorias, como por qué el grafo K3,3 no es planar: veremos el índice de espacios con acciones de Z2,productos borrados, �joins� borrados y su aplicación al teorema de no encajamiento de complejossimpliciales.

Preliminares
Notación y primeras de�niciones
Si S es un conjunto, |S| denota el cardinal de S; asimismo,(Sk
)es el conjunto de todos los
subconjuntos de S de tamaño k. También, [n] denota al conjunto {1, 2, ..., n}.
Por idX queremos decir la función identidad en X, de�nida como id(x) = x para todo x ∈ X.
El producto punto o escalar de dos vectores x = (x1, ..., xd), y = (y1, ..., yd) ∈ Rd es 〈x, y〉 =x1y1 + x2y2 + . . .+ xdyd. La norma Euclidiana de x es ||x|| =
√〈x, y〉 y la distancia entre x, y
es ‖x− y‖. Dado un conjunto F ⊆ Rd, la distancia de x a F es d(x, F ) = infs∈Fd(x, s).
Un hiperplano en Rd es un conjunto de la forma {x ∈ Rd : 〈a, x〉 = b} para algún a ∈ Rd, a 6= 0y algún b ∈ Rd. Todo hiperplano genera dos semi-espacios (cerrados), a saber: {x ∈ Rd :〈a, x〉 ≤ b} y {x ∈ Rd : 〈a, x〉 ≥ b}.
La bola unitaria {x ∈ Rd : ||x|| ≤ 1} se denotará por Bd y Sd−1 = {x ∈ Rd : ||x|| = 1} es laesfera unitaria.
Un conjunto C ⊆ Rd es convexo si ∀x, y ∈ C, el segmento xy está contenido en C. La envolturaconvexa de un conjuntoX ⊆ Rd es la intersección de todos los conjuntos convexos que contienena X y, la denotaremos como conv(X). Además, cada punto x ∈ conv(X) se puede escribir comouna combinación convexa de puntos de X: es decir, existen puntos x1, x2, ..., xn ∈ X y númerosreales a1, a2, ..., an ≥ 0 tales que
∑ni=1 ai = 1 y x =
∑ni=1 aixi. Por último, un politopo convexo
es la envoltura convexa de un conjunto �nito de puntos en Rd.
Todo politopo convexo se puede expresar como la intersección de �nitamente muchos semi-espacios. Recíprocamente, si una intersección de �nitamente muchos sub-espacios está acotada,entonces es un politopo convexo. Una cara de un politopo convexo P es o bien P o bien P ∩ h,donde h es un hiperplano que no divide a P , es decir, uno de los dos semi-espacios abiertosde�nidos por h no intersecta a P .
La envoltura afín de un conjunto S ⊆ Rn es el conjunto {∑k
i=1 aixi : xi ∈ S, a ∈ R,∑k
i=1 ai = 1}
Dados los espacios topológicos (X,T1), (Y, T2), decimos que son homeomorfos (notado X ∼= Y )si existe una biyección φ : X → Y tal que para todo U ⊆ X, φ(U) ∈ T2 si y sólo si U ∈ T1.
Dado k ≥ 0, decimos que X es k-conexo si para todo l = −1, 0, 1, . . . , k toda función continuaf : Sl → X se puede extender a una función continua f : Bl+1 → X. Aquí, S−1 se interpretacomo ∅ y B0 como un punto, de tal manera que (−1)-conexo signi�ca ser no vacío.
Un grafo G es una pareja (V,E), donde V es un conjunto �nito y E ⊆(V2
). Diremos que V
es el conjunto de vértices y E el de aristas. Para un grafo G, escribimos V (G) para el conjuntode vértices y E(G) para el de aristas. Kn = (V,
(V2
)) es el grafo completo en n vértices y Km,n
el grafo bipartito completo.
Un k−coloramiento de un grafo G = (V,E) es una función c : V → [k] tal que c(u) 6= c(v) paratodo {u, v} ∈ E. 1
Capítulo 0
Complejos simpliciales y Topología
0.1. Complejos simpliciales
0.1.1. Independencia afín
De�nición 0.1. Sean v0, ..., vk puntos en Rd. Decimos que son afínmente dependientes si existennúmeros reales a0, ..., ak no todos cero, tales que
∑ki=0 aivi = 0 y
∑ki=0 ai = 0. De lo contrario, diremos
que son afínmente independientes.
El concepto de independencia afín para dos puntos signi�ca v0 6= v1; para 3 puntos, signi�caque no yacen sobre una misma linea; para 4, que no están sobre un mismo plano, etc.
0.1.2. Simplejos
De�nición 0.2. Un simplejo σ es la envoltura convexa de un conjunto �nito afínmente indepen-diente A ⊆ Rd. Los puntos de A son los vértices de σ. La dimensión de σ es dim σ := |A| − 1.
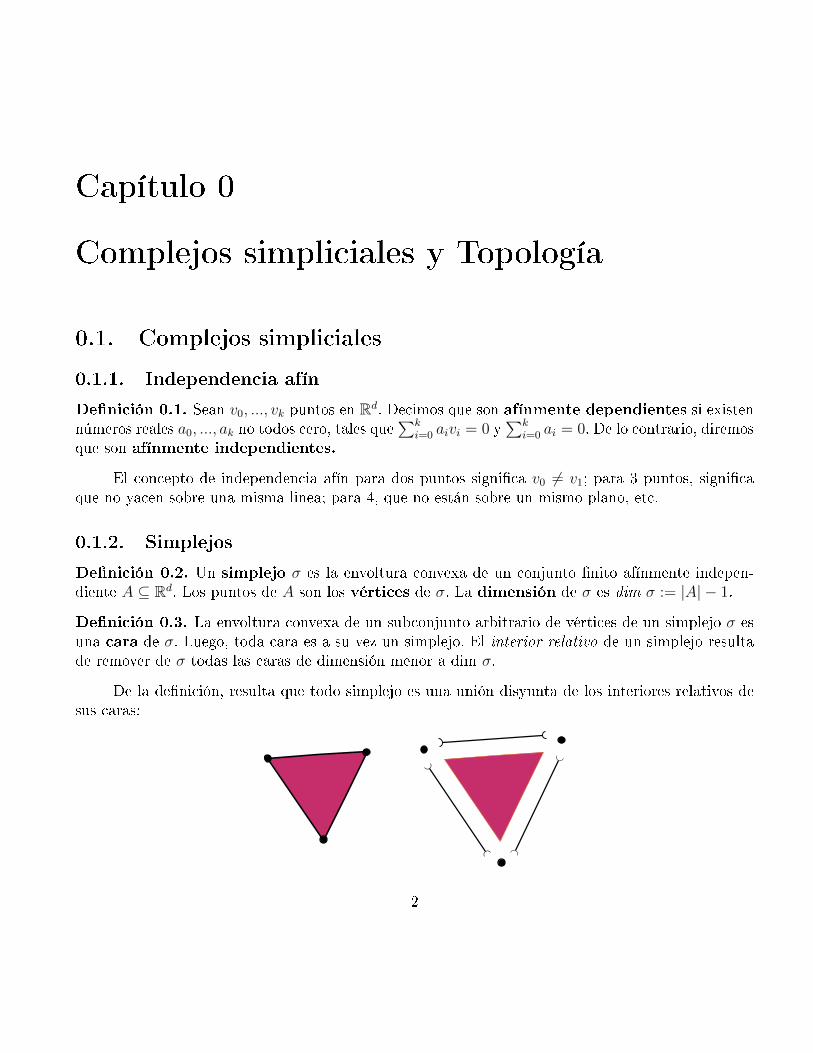
De�nición 0.3. La envoltura convexa de un subconjunto arbitrario de vértices de un simplejo σ esuna cara de σ. Luego, toda cara es a su vez un simplejo. El interior relativo de un simplejo resultade remover de σ todas las caras de dimensión menor a dim σ.
De la de�nición, resulta que todo simplejo es una unión disyunta de los interiores relativos desus caras:
2
0.1.3. Complejos simpliciales
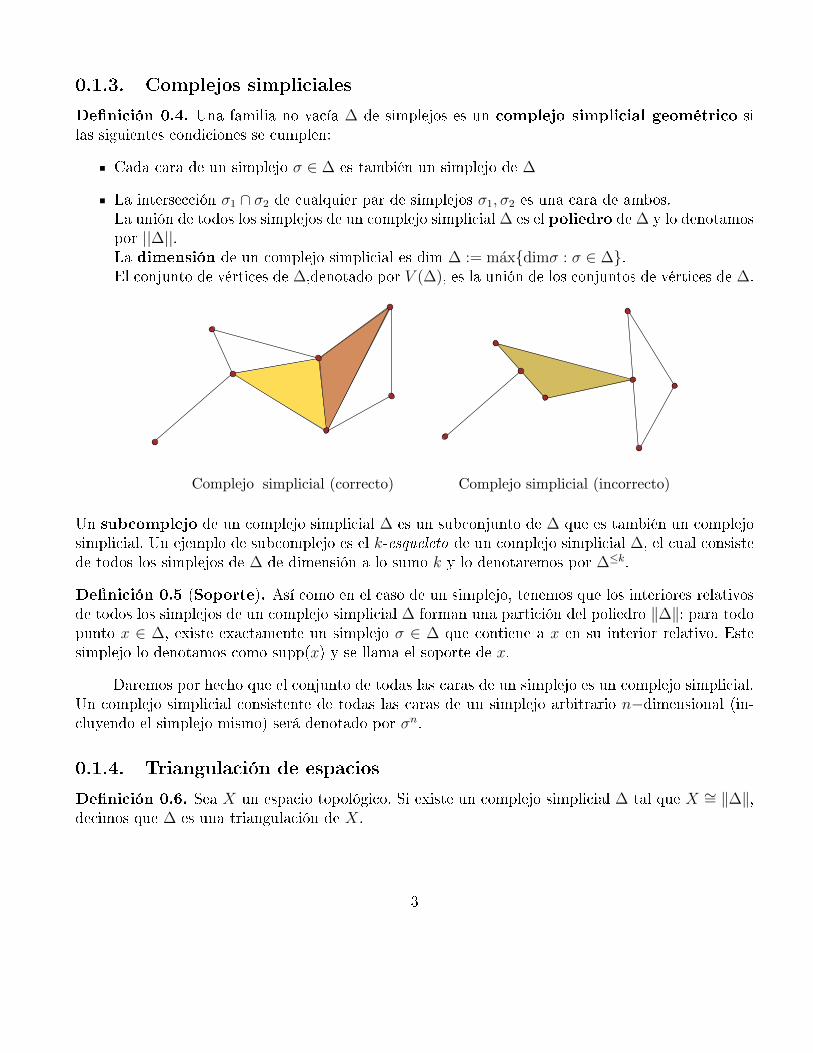
De�nición 0.4. Una familia no vacía ∆ de simplejos es un complejo simplicial geométrico silas siguientes condiciones se cumplen:
Cada cara de un simplejo σ ∈ ∆ es también un simplejo de ∆
La intersección σ1 ∩ σ2 de cualquier par de simplejos σ1, σ2 es una cara de ambos.La unión de todos los simplejos de un complejo simplicial ∆ es el poliedro de ∆ y lo denotamospor ||∆||.La dimensión de un complejo simplicial es dim ∆ := max{dimσ : σ ∈ ∆}.El conjunto de vértices de ∆,denotado por V (∆), es la unión de los conjuntos de vértices de ∆.
Un subcomplejo de un complejo simplicial ∆ es un subconjunto de ∆ que es también un complejosimplicial. Un ejemplo de subcomplejo es el k-esqueleto de un complejo simplicial ∆, el cual consistede todos los simplejos de ∆ de dimensión a lo sumo k y lo denotaremos por ∆≤k.
De�nición 0.5 (Soporte). Así como en el caso de un simplejo, tenemos que los interiores relativosde todos los simplejos de un complejo simplicial ∆ forman una partición del poliedro ‖∆‖: para todopunto x ∈ ∆, existe exactamente un simplejo σ ∈ ∆ que contiene a x en su interior relativo. Estesimplejo lo denotamos como supp(x) y se llama el soporte de x.
Daremos por hecho que el conjunto de todas las caras de un simplejo es un complejo simplicial.Un complejo simplicial consistente de todas las caras de un simplejo arbitrario n−dimensional (in-cluyendo el simplejo mismo) será denotado por σn.
0.1.4. Triangulación de espacios
De�nición 0.6. Sea X un espacio topológico. Si existe un complejo simplicial ∆ tal que X ∼= ‖∆‖,decimos que ∆ es una triangulación de X.
3
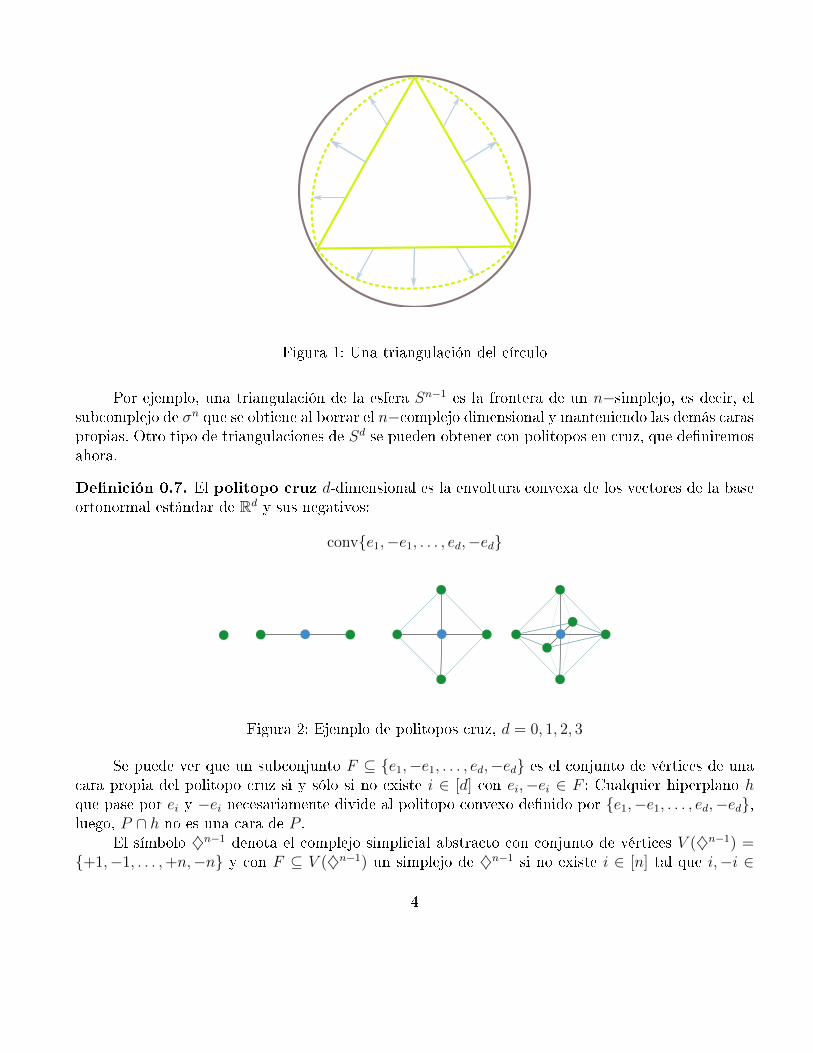
Figura 1: Una triangulación del círculo
Por ejemplo, una triangulación de la esfera Sn−1 es la frontera de un n−simplejo, es decir, elsubcomplejo de σn que se obtiene al borrar el n−complejo dimensional y manteniendo las demás caraspropias. Otro tipo de triangulaciones de Sd se pueden obtener con politopos en cruz, que de�niremosahora.
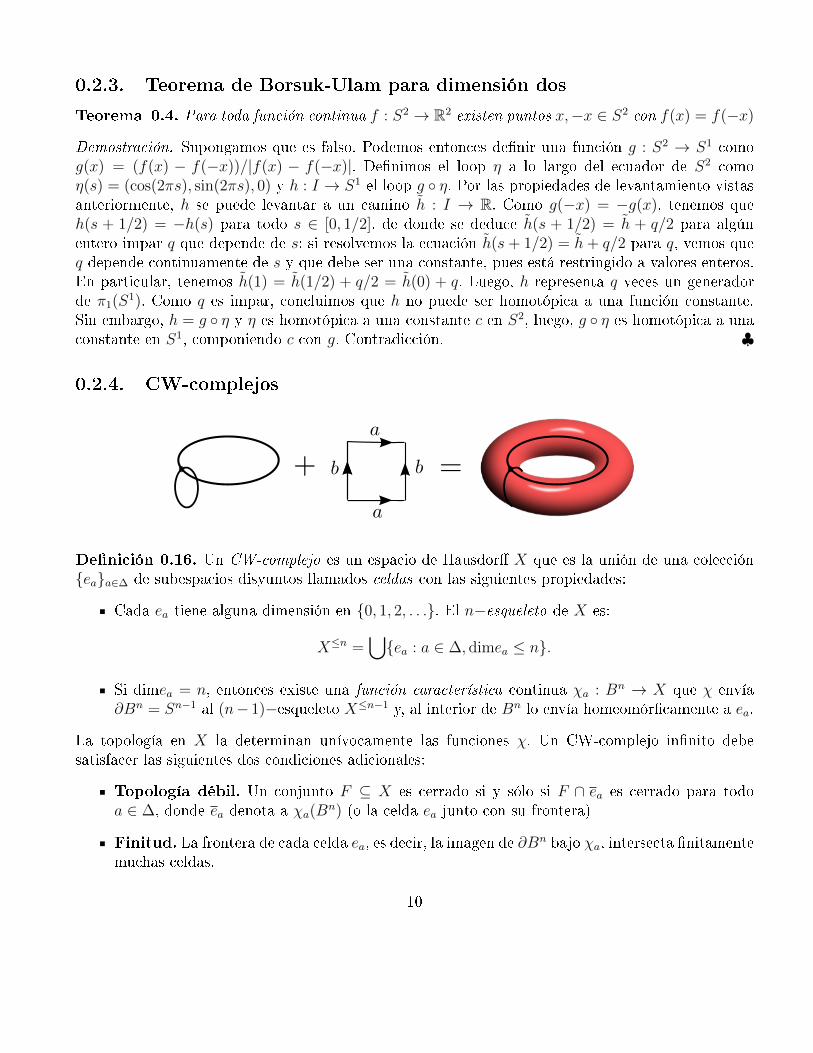
De�nición 0.7. El politopo cruz d-dimensional es la envoltura convexa de los vectores de la baseortonormal estándar de Rd y sus negativos:
conv{e1,−e1, . . . , ed,−ed}
Figura 2: Ejemplo de politopos cruz, d = 0, 1, 2, 3
Se puede ver que un subconjunto F ⊆ {e1,−e1, . . . , ed,−ed} es el conjunto de vértices de unacara propia del politopo cruz si y sólo si no existe i ∈ [d] con ei,−ei ∈ F : Cualquier hiperplano hque pase por ei y −ei necesariamente divide al politopo convexo de�nido por {e1,−e1, . . . , ed,−ed},luego, P ∩ h no es una cara de P .
El símbolo ♦n−1 denota el complejo simplicial abstracto con conjunto de vértices V (♦n−1) ={+1,−1, . . . ,+n,−n} y con F ⊆ V (♦n−1) un simplejo de ♦n−1 si no existe i ∈ [n] tal que i,−i ∈
4

F . Por el comentario anterior, ♦n−1 es la frontera del politopo cruz n dimensional. En particular,‖♦n−1‖ ∼= Sn−1.
0.1.5. Complejos simpliciales abstractos
De�nición 0.8. Un complejo simplicial abstracto es una pareja (V,K), donde V es un conjunto�nito y K ⊆ 2V es tal que si F ∈ K y G ⊆ F entonces G ∈ K. Los conjuntos en K se llaman simplejosabstractos. Además, dim(K) = max{|F | − 1 : F ∈ K}
Todo complejo simplicial geométrico ∆ determina un complejo simplicial abstracto. Los puntosdel complejo simplicial abstracto son todos los vértices de los simplejos de ∆, entonces V := V (∆)y, los conjuntos en el complejo simplicial abstracto son los conjuntos de vértices de los simplejos de ∆.Por ejemplo, consideremos el poliedro ‖∆‖: En este caso, K es {∅, {1}, {2}, {3}, {4}, {1, 2}, {1, 3}, {2, 3},
Figura 3: Poliedro del complejo simplicial ∆
{2, 4}, {3, 4}, {1, 2, 3}}. Llamamos a ∆ una realización geométrica de K y, ‖∆‖ se conoce tambiéncomo un poliedro de K.
Ahora, dado un complejo simplicial abstracto (V,K) con V �nito construimos una realizacióngeométrica como sigue: Sea n := |V |−1 e identi�camos V con el conjunto de vértices de un n−simplejodimensional, σn. De�nimos un subcomplejo de σn como ∆ := {conv(F ) : F ∈ K}. ∆ es un complejosimplicial geométrico y su complejo abstracto asociado es K. De tal manera que todo complejosimplicial en n+ 1 vértices se puede realizar en Rn.
De�nición 0.9. Sean K, L dos complejos simpliciales abstractos. Una función simplicial f :V (K) → V (L) es una función que manda simplejos a simplejos, es decir, f(F ) ∈ L para F ∈ K.Consecuentemente, si f es biyectiva y f−1 es simplicial, diremos que K es isomorfo a L y lo notare-mos como K ∼= L.
Ahora, dada una función simplicial f : V (K) → V (L), vamos a asociarle una función continua‖f‖ : ‖K‖ → ‖L‖ de sus poliedros. Primero, notamos que si σ ⊆ Rd es un k-simplejo con vérticesv0, v1 . . . , vk entonces cada punto x ∈ σ se puede escribir unívocamente como una combinaciónconvexa x =
∑ki=0 aivi, donde a0, . . . , ak ≥ 0 y
∑ki=0 ai = 1; esto se debe a que σ = conv(v0, . . . , vn)
5

y los vectores v1, . . . , vn son afínmente independientes. Lo anteriormente dicho, motiva la siguientede�nición:
De�nición 0.10. Sean ∆1,∆2 complejos simpliciales abstractos y sean K1,K2 sus respectivos polie-dros. Dada f : V (K1)→ V (K2) una función simplicial, de�nimos la extensión afín de f
‖f‖ : ‖∆1‖ → ‖∆2‖
como sigue: si σ = supp(x) ∈ ∆1, los vértices de σ son v0, . . . , vk y x =∑k
i=0 aivi, con a0, . . . , ak ≥ 0
y∑k
i=0 ai = 1, entonces ‖f‖(x) =∑k
i=0 aif(vi).
Cabe notar que ‖f‖ está bien de�nida, pues, {f(v0), . . . , f(vk)} siempre es el conjunto devértices de algún simplejo en ∆2. Sin demostrar, diremos que ‖f‖ es continua y, si f es inyectiva,también lo es ‖f‖. Por último, si f es un isomor�smo, entonces ‖f‖ es un homeomor�smo.
0.2. Topología [Hat]
Cualquier prueba conocida de la conjetura de Kneser tiene como sustento el uso de algunaversión del teorema de Borsuk-Ulam; ello refuerza el poder que tienen determinados resultados to-pológicos en la solución de problemas combinatorios, al punto de existir hogaño una sub-rama delas matemáticas conocida como Topologia Combinatoria. Tal relevancia nos motiva a querer dar unaprueba de este teorema, aunque la mayoría dependen de otros resultados mayores y emplean maquina-ria avanzada. Sin embargo, podemos ofrecer una prueba elemental, y como precisamos una cantidadconsiderable de pre-requisitos y de�niciones, expondremos y, en determinados casos, desarrollaremosel material topológico necesario para tal �n en las subsiguientes secciones.
Proposición 0.1 (Lema del número de Lebesgue). Sea A un cubrimiento por abiertos delespacio métrico (X, d). Si X es compacto, existe δ > 0 tal que para todo subconjunto M de X condiámetro menor a δ se tiene que existe un elemento de A que lo contiene.
0.2.1. Grupo Fudamental
De�nición 0.11. Un camino en un espacio X es una función continua f : I → X dondeI = [0, 1].
Una homotopía de caminos en X es una familia ft : I → X, 0 ≤ t ≤ 1, tal que:
1. ft(0) = x0 y ft(1) = x1 para todo t (x0 y x1 son los puntos terminales).
2. La función F : I × I → X de�nida como F (s, t) = ft(s) es continua.
Si existe tal familia para un par de funciones f0, f1, decimos que son homotópicas y, lo notamospor f0 ' f1.
6

Proposición 0.2. La relación de homotopía de caminos con puntos terminales �jos es una relaciónde equivalencia.
Dados dos caminos f, g : I → X tal que f(1) = g(0), de�nimos el producto de f y g como sigue
f · g(s) =
{f(2s), 0 ≤ s ≤ 1/2
g(2s− 1), 1/2 ≤ s ≤ 1
Esta operación preserva clases de homotopía, pues, si f0 ' f1 y g0 ' g1 (con homotopías ft y gt) yf0(1) = g0(0) entonces ft · gt está bien de�nida y hace que f0 · g0 ' f1 · g1.
En nuestro caso, nos restringiremos a caminos f : I → X con puntos terminales iguales:f(0) = f(1) = x0 ∈ X. A tales caminos los llamaremos loops y a x0 el punto base.
De�nición 0.12. El conjunto de todas las clases de homotopía [f ] de loops f : I → X, con puntobase x0, se denotará por π1(X, x0).
Se puede ver que la operación antes de�nida es asociativa; además, dado un loop f y el caminoconstante c : I → X de�nido por c(s) = f(1) = f(0) para todo s ∈ I se veri�ca que f · c ' f yc · f ' f . Por último, podemos de�nir el camino inverso de f como f(s) = f(1− s) y obtenemos quef · f ' cf . Resumiendo todo tenemos:
Teorema 0.1. π1(X, x0) es un grupo con respecto al producto [f ][g] = [f · g]
De�nición 0.13. El grupo π1(X, x0) se llama el grupo fundamental de X en el punto base x0.
El siguiente resultado nos dice que si X es conexo por caminos, el grupo π1(X, x0) es, móduloisomor�smo, independiente de la escogencia de x0.
Proposición 0.3. Sea h : I → X un camino de x0 a x1 con inverso h. La función ϕ : π1(X, x1) →π1(X, x0) de�nida por ϕ[f ] = [h · f · h] es un isomor�smo.
Por último, queremos dar la prueba de una proposición que usaremos al momento de exhibirlas propiedades de las funciones equivariantes.
Proposición 0.4. La esfera n-dimensional es (n− 1)-conexa y no es n-conexa
Demostración. Una de las versiones del teorema de Borsuk-Ulam que veremos en páginas posterioresdice que no existe función continua f : Bn → Sn−1 que satisfaga f(−x) = −f(x) para todo x ∈ Sn−1.
Sea f : Sk → Sn una función continua tal que k < n. Mostraremos que f es homotópica a unafunción g : Sk → Sn que no es sobreyectiva. Si g no es sobre, entonces es homotópica a una constante(si g no envía nada a x, la imagen de f puede contraerse continuamente a −x), de donde se deduceque f también es homotópica a una constante.
7

Para construir g, tomamos un ε > 0 tal que si ‖x− y‖ < ε entonces ‖f(x)− f(y)‖ < 1 (por lacontinuidad uniforme de f) y una triangulación ∆ de Sk tal que todo simplejo de ∆ tenga diámetromenor que ε. De�nimos F : Sk × [0, 1]→ Sn como:
F (x, t) :=
m∑i=1
λif(vi) + (1− t)f(x)
‖m∑i=1
λif(vi) + (1− t)f(x)‖,
donde v1, . . . , vm son los vértices de supp(x) (recordemos que es el simplejo de ∆ que contiene ax en su interior relativo) y x =
∑mi=1 λivi expresa a x como una combinación convexa de los vi.
Necesitamos ver que el denominador nunca es cero: Todos los f(vi) y f(x) distan a lo sumo 1 dev1 y, por tanto, todos yacen en una porción esférica de radio menor que 1. Su envoltura convexa,entonces, no puede contener al origen. Tenemos pues que F está bien de�nida y es continua. Ademas,F (x, 0) = f(x)
‖f(x)‖ = f(x) para todo x ∈ Sk.Hacemos g(x) := F (x, 1). Como dimσ < n para todo σ ∈ ∆, cada imagen g(σ) está contenida
en algún hiperplano en Rn+1 que pasa por el origen. Una unión �nita de hiperplanos no puede cubrirla esfera, por tanto, g no puede ser sobreyectiva.
♣
0.2.2. Espacios recubridores
De�nición 0.14. Un espacio recubridor de un espacio X es un espacio X junto con una funcióncontinua p : X → X sobreyectiva tal que:
8

1. p−1(Ua) =⊔i∈I Uai (es decir, Uai ∩ Uaj = ∅ para i 6= j)
2. p|Uai: Uai → X es un homeomor�smo.
Levantamientos
De�nición 0.15. Dado un recubrimiento (espacio recubridor) p : X → X, un lenvantamiento deuna función continua f : Y → X es una función continua f : Y → X tal que p ◦ f = f
X
p
��Y
f//
foO
X
Propiedades
Teorema 0.2 (Levantamiento de homotopías). Dado un espacio recubridor p : X → X, unahomotopía ft : Y → X y una función f0 : Y → X que levanta a f0, existe una única homotopíaft : Y → X de f0 que levanta a ft
Teorema 0.3. La función p∗ : π1(X, x0) → π1(X, x0) inducida por el espacio recubridor p :(X, x0) → (X, x0) es inyectiva. El subgrupo p∗(π1(X, x0)) consiste de las clases de homotopía deloops en X basados en x0 cuyos levantamientos a X que inician en x0 son loops.
Si p : X → X es un espacio recubridor, se tiene que la cardinalidad del conjunto p−1(x) es lamisma para todo x ∈ X. Si X es conexo, esta cardinalidad es constante conforme x recorre todo X.A tal cardinalidad se le llama el número de hojas o multiplicidad del recubrimiento.
Proposición 0.5 (Criterios de existencia y unicidad de levantamientos). A continuación,mostramos un par de proposiciones sobre las condiciones necesarias para la existencia y unicidad deun determinado levantamiento.
Existencia. Supongamos que tenemos un recubrimiento p : (X, x0) → (X, x0) y una función f :(Y, y0)→ (X, x0) con Y conexo por caminos y localmente conexo por caminos. Entonces, existeun levantamiento f : (Y, y0)→ (X, x0) de f si y sólo si f∗(π1(Y, y0)) ⊆ p∗(π1(X, x0)).
Unicidad. Sean p : X → X un recubrimiento y f una función continua que admite dos levan-tamientos f1, f2 : Y → X. Si Y es conexo y f1(y0) = f2(y0) para algún y0 ∈ Y , entoncesf1 = f2.
9
0.2.3. Teorema de Borsuk-Ulam para dimensión dos
Teorema 0.4. Para toda función continua f : S2 → R2 existen puntos x,−x ∈ S2 con f(x) = f(−x)
Demostración. Supongamos que es falso. Podemos entonces de�nir una función g : S2 → S1 comog(x) = (f(x) − f(−x))/|f(x) − f(−x)|. De�nimos el loop η a lo largo del ecuador de S2 comoη(s) = (cos(2πs), sin(2πs), 0) y h : I → S1 el loop g ◦ η. Por las propiedades de levantamiento vistasanteriormente, h se puede levantar a un camino h : I → R. Como g(−x) = −g(x), tenemos queh(s + 1/2) = −h(s) para todo s ∈ [0, 1/2], de donde se deduce h(s + 1/2) = h + q/2 para algúnentero impar q que depende de s: si resolvemos la ecuación h(s+ 1/2) = h+ q/2 para q, vemos queq depende continuamente de s y que debe ser una constante, pues está restringido a valores enteros.En particular, tenemos h(1) = h(1/2) + q/2 = h(0) + q. Luego, h representa q veces un generadorde π1(S1). Como q es impar, concluimos que h no puede ser homotópica a una función constante.Sin embargo, h = g ◦ η y η es homotópica a una constante c en S2, luego, g ◦ η es homotópica a unaconstante en S1, componiendo c con g. Contradicción. ♣
0.2.4. CW-complejos
De�nición 0.16. Un CW-complejo es un espacio de Hausdor� X que es la unión de una colección{ea}a∈∆ de subespacios disyuntos llamados celdas con las siguientes propiedades:
Cada ea tiene alguna dimensión en {0, 1, 2, . . .}. El n−esqueleto de X es:
X≤n =⋃{ea : a ∈ ∆, dimea ≤ n}.
Si dimea = n, entonces existe una función característica continua χa : Bn → X que χ envía∂Bn = Sn−1 al (n− 1)−esqueleto X≤n−1 y, al interior de Bn lo envía homeomór�camente a ea.
La topología en X la determinan unívocamente las funciones χ. Un CW-complejo in�nito debesatisfacer las siguientes dos condiciones adicionales:
Topología débil. Un conjunto F ⊆ X es cerrado si y sólo si F ∩ ea es cerrado para todoa ∈ ∆, donde ea denota a χa(B
n) (o la celda ea junto con su frontera)
Finitud. La frontera de cada celda ea, es decir, la imagen de ∂Bn bajo χa, intersecta �nitamentemuchas celdas.
10

Ejemplo 0.1. El espacio real proyectivo RPn se de�ne como el espacio de todas las líneas através del origen en Rn+1. A RPn se le da una topologia como el espacio cociente de Rn+1 − {0} conla relación de equivalencia v ∼ δv para δ 6= 0. RPn es también el espacio cociente Sn/(v ∼ −v), esdecir, la esfera con los puntos antipodales identi�cados. Esto equivale a decir que RPn es el espaciocociente de un hemisferio de Bn con puntos antipodales de ∂Bn identi�cados. Como ∂Bn con puntosantipodales identi�cados es RPn−1, vemos que RPn se obtiene de RPn−1 pegándole una n-celda, conla proyección cociente Sn−1 → RPn−1 como la función de pegado. Por inducción en n, se sigue queRPn tiene una estructura de CW-complejo: e0∪ e1∪ e2∪ · · · ∪ en, con una celda ei en cada dimensióni ≤ n.
0.3. Homología
0.3.1. Homología singular
El simplejo estándar n−dimensional lo notamos por el conjunto:
∆n := {(t0, . . . , tn) ∈ Rn+1 :n+1∑i=0
ti = 1, ti ≥ 0 para todo i}
De�nición 0.17. Un n−simplejo singular en un espacio X es una función continua σ : ∆n → X.
Sea Cn(x) el grupo abeliano libre con base el conjunto de n−simplejos singulares en X. Loselementos de Cn(X) se llaman n-cadenas y son sumas �nitas formales
∑i niσi con ni ∈ Z y σi :
∆n → X.
De�nición 0.18. El operador diferencial o frontera ∂n : Cn(X)→ Cn−1(X) se de�ne como:
∂n(σ) :=∑i
(−1)iσ|[v0,v1,...,vi,...,vn]
La notación vi en [v0, v1, . . . , vi, . . . , vn] signi�ca que estamos borrando el vértice vi de la se-cuencia total. En esta de�nición subyace una identi�cación canónica de [v0, v1, . . . , vi, . . . , vn] con∆n−1, que preserva el orden de los vértices, así que, σ[v0,v1,...,vi,...,vn] se puede ver como una función∆n−1 → X, es decir, un n− 1-simplejo singular.
Teorema 0.5. La composición ∂n−1 ◦ ∂n = 0.
El teorema anterior se abrevia diciendo que ∂2 = 0; de éste, se sigue que Im(∂n+1) ⊆ Ker(∂n),donde Im y Ker signi�can imagen y Kernel. De esta manera podemos de�nir el grupo de homologiasingular Hn(X) como
Hn(X) := Ker(∂n)/Im(∂n+1).
11

Propiedades
Dada una función continua f : X → Y , se induce un homomor�smo f# : Cn(X) → Cn(Y )componiendo todo n-simplejo singular σ : ∆n → X con f para obtener un n-simplejo singularf#(σ) = f ◦ σ : ∆n → Y , luego, extendemos f# linealmente haciendo f#(
∑i niσi) =
∑i nif#(σ)i =∑
i nif ◦ σi.Las funciones f# satisfacen f# ◦ ∂ = ∂ ◦ f#. Así, el diagrama
· · · // Cn+1(X)
f#��
∂ // Cn(X)
f#��
∂ // Cn−1(X)
f#��
// · · ·
· · · // Cn+1(Y ) ∂ // Cn(Y ) ∂ // Cn−1(Y ) // · · ·
corresponde a un diagrama conmutativo. El hecho de que las funciones f# : Cn(X) → Cn(Y )satisfagan f# ◦ ∂ = ∂ ◦ f# se expresa también diciendo que las f# de�nen una función de cadenasdel complejo de cadenas singulares de X a Y . La relación f# ◦ ∂ = ∂ ◦ f# implica que f# mandaciclos a ciclos y fronteras a fronteras. Por tanto, f# induce un homomor�smo f∗ : Hn(X)→ Hn(Y ).En resumen:
Teorema 0.6. Una función de cadenas induce homomor�smos entre los grupos de homología de losdos complejos.
Además, también se tiene el siguiente resultado,
Teorema 0.7. (f ◦ g)∗ = f∗ ◦ g∗ para f : Y → Z y g : X → Y .
Si dos funciones f, g : X → Y son homotópicas, entonces inducen el mismo homomor�smof∗ = g∗ : Hn(X)→ Hn(Y )
De�nición 0.19. Una secuencia exacta es una secuencia de homomor�smos
· · · // An+1fn+1 // An
fn // An−1// · · ·
tal que Ker(fn) = Im(fn+1) para todo n.
0.3.2. Grupos de homología relativa
Dado un espacio X y A ⊆ X, denotamos por Cn(X,A) el grupo cociente Cn(X)/Cn(A). Comola función ∂ : Cn(X)→ Cn−1(X) manda C(A) a Cn−1(A), ésta induce una función frontera cociente:∂ : Cn(X,A)→ Cn−1(X,A). Así, tenemos la secuencia de funciones frontera
· · · // Cn∂ // Cn−1
// · · ·
La relación ∂2 = 0 se tiene aún para estas funciones. Así, tenemos un complejo de cadenas y, losgrupos de homología de este complejo de cadenas son por de�nición los grupos de homologíarelativa Hn(X,A).
12

Teorema 0.8. Toda pareja (X,A) induce una secuencia exacta larga mediante la inclusión i :Cn(A)→ Cn(X) y la función cociente j : Cn(X)→ Cn(X,A):
· · · // Hn(A)i∗ // Hn(X)
j∗ // Hn(X,A) ∂ // Hn−1(A)i∗ // Hn−1(X) // · · ·
Aquí, también se tiene que una función f : (X,A)→ (Y,A) con f(A) ⊆ B induce homomor�s-mos f# : Cn(X,A)→ Cn(Y,B). Como la relación f# ◦∂ = ∂ ◦f# se sigue teniendo, podemos obtenerhomomor�smos f∗ : Hn(X,A)→ Hn(Y,B)
Proposición 0.6. Si dos funciones f, g : (X,A) → (Y,B) son homotópicas entonces f# = g# :Hn(X,A)→ Hn(Y,B)
Cuando calculamos homología, usamos cadenas de la forma∑
i niσi, sin embargo, también esposible tomar los coe�cientes ni como elementos de cierto grupo G en lugar de Z. Estas n-cadenasforman un grupo abeliano libre Cn(X;G) y se puede ver, a su vez, que estos generan complejos decadenas. Los grupos de homología resultantes se llaman grupos de homología con coe�cientesen G.
0.3.3. Ejemplos importantes
1. Si X es un conjunto de un punto, entonces Hn(X;Z2) = 0 para n > 0
2. Si X es un CW-complejo de dimensión n entonces Hi(X;Z2) = 0
3. Hi(Sn;Z2) =
{Z2, si i = 0, n.
0, si 0 < i < n.
4. Hi(RPn;Z2) =
{Z2, si 0 ≤ i ≤ n.
0, si i > n.
Ejemplo 0.2. Dada una función f : Sn → Sn el grado de f (módulo 2) es:
grado(f) =
{0, si f∗ = 0
1, si f∗ es un isomor�smo.
0.3.4. Prueba del teorema de Borsuk-Ulam
Teorema 0.9 (Teorema de Borsuk). Toda función impar f : Sn → Sn tiene grado 1 (mod 2).
Demostración. Sea p : Sn → RPn el recubrimiento de dos hojas que identi�ca puntos antipodales.Probaremos el teorema de Borsuk usando los complejos de cadenas y de homología de estos espaciosy funciones con coe�cientes en Z2.
13

Notamos por Cn(X) al complejo de cadenas Cn(X;Z2) y por Hn(X) al grupo de homologíacon coe�cientes en Z2, Hn(X;Z2). Sea p : X → X cualquier espacio recubridor de dos hojas. Sea −la función que intercambia los dos puntos en p−1(P ) para cada P ∈ X.
La función correspondiente p# : Cn(X) → Cn(X) de complejos de cadenas es sobreyectiva: Si∆n es un n−simplejo singular, hay exactamente dos n−simplejos singulares ∆1 y ∆2 = −◦∆1 en Xque satisfacen p ◦∆i = ∆.
Por lo tanto, la asignación ∆ 7→ ∆1 + ∆2 determina un homomor�smo τ : Cn(X) → Cn(X),llamado el transfer.
Ahora, una cadena de complejos está en el Kernel de p cuando cada n−simplejo singular −◦∆ocurre con los mismos coe�cientes que ∆, entonces, tenemos la siguiente secuencia exacta corta
0 // Cn(X) τ // Cn(X)p# // Cn(X) // 0
La cual, por el teorema 0.8 induce la secuencia exacta larga:
· · · // Hn(X) τ // Hn(X)p∗ // Hn(X) ∂ // Hn−1(X) τ // Hn−1(X) // · · ·
Lema 0.1. Sea f : X → X una función continua tal que f(−x) = −f(x), y, sea g : Y → Y lafunción resultante de la condición g ◦ p = p ◦ f . Entonces, el siguiente diagrama conmuta
0 // Cn(X)
g#
��
τ // Cn(X)
f#��
p# // Cn(X)
g#
��
// 0
0 // Cn(X) τ // Cn(X)p# // Cn(X) // 0
Demostración. El cuadrado de la derecha conmuta pues g# ◦p# = (g◦p)# = (p◦f)# = p# ◦f#. Parael caso de los cuadrados de la izquierda consideremos un n−simplejo singular ∆ y ∆1, ∆2 sus doslevantamientos, entonces f#(τ([∆])) = [f ◦∆1]+[f ◦∆2]. Como f ◦∆1 y f ◦∆2 son dos levantamientosde g ◦∆, entonces, τ(g#([∆])) = [f ◦∆1] + [f ◦∆2], como queríamos. ♣
Se sigue del lema que las funciones correspondientes entre las secuencias exactas de homologíaconmutan. Aplicamos todo lo hecho a X = Sn,Y = RPn, p : Sn → RPn y − la acción antipodal. Lasecuencia larga resultante tiene la forma:
0 // Hn(RPn)τ∗∼=// Hn(Sn)
p∗
0// Hn(RPn) ∂
∼=// Hn−1(RPn) // 0 // · · ·
· · · // 0 // Hi(RPn) ∼=// Hi−1(RPn) // 0 // · · ·
· · · // 0 // H1(RPn) ∂∼=// H0(RPn)
τ∗
0// H0(Sn)
p∗∼=// H0(RPn) // 0.
14

Como Hn(Sn) = Z2, se tiene que Hn(RPn) 6= 0, luego, τ∗ : Hn(RPn) → Hn(Sn) es un iso-mor�smo. Por tanto, p∗ : Hn(Sn) → Hn(RPn) es cero, de donde, ∂ : HnRPn → Hn−1RPn es unisomor�smo.
Continuando de esta manera, vemos que ∂ : HiRPn → Hi−1RPn es un isomor�smo para todoi = 1, 2, . . . , n. En particular, Hi(RPn) = Z2 para i = 0, . . . , n.
Ahora, supongamos que f : Sn → Sn es una función tal que f(−x) = −f(x), sea f := g :RPn → RPn la función cociente inducida por f . Decir que el grado de f es 1, módulo dos, equivalea decir que f∗ : Hn(Sn)→ Hn(Sn) es un isomor�smo. Veamos que f∗ es isomor�smo: si aplicamos ellema anterior, tenemos los diagramas conmutativos:
Hn(RPn)τ∗∼=//
g∗��
Hn(Sn)
f∗��
Hn(RPn) τ∗
∼= // Hn(Sn)
Hi(RPn) ∂∼=//
g∗��
Hi−1(RPn)
g∗��
Hi(RPn)∂
∼= // Hi−1(RPn)
Donde los diagramas de la derecha son válidos para i = 1, 2, . . . , n.Como f ∗ : H0(RPn) → H0(RPn) es un isomor�smo, se sigue de los cuadrados de la derecha
e inducción en i que el homomor�smo f ∗ : Hi(RPn) → Hi(RPn) es un isomor�smo para todoi = 0, . . . , n. En particular, para i = n. De esta manera, el diagrama izquierdo implica que f∗ :Hn(Sn)→ Sn debe ser un isomor�smo también, que era lo que queríamos. ♣
Demostración del teorema de Borsuk-Ulam
Teorema 0.10. Para toda función f : Sn → Rn existe un punto x ∈ Sn tal que f(x) = f(−x)
Demostración. Supongamos que el teorema es falso, entonces, sea g(x) = f(x)−f(−x)‖f(x)−f(−x)‖ . Claramente,
g : Sn → Sn−1 sigue siendo una función impar. Consideramos g|Sn−1 : Sn−1 → Sn−1. Por el lemaanterior, g tiene grado 1 (mod 2).
Sin embargo, g|Sn−1+
(donde Sn−1+ es uno de los hemisferios acotados por Sn−1) se puede extender
a una función Bn → Sn−1, mediante la proyección del hemisferio Sn−1+ en el disco Bn. Como la bola n-
dimensional se puede retraer continuamente a un punto, tenemos que g es homotópica a una funciónconstante. Luego, g∗ = 0 y, por lo tanto, grado(g) = 0 (mod 2). Contradicción. ♣
15

Capítulo 1
Conjetura de Kneser
1.1. El problema
En 1955, Martin Kneser sugirió el siguiente problema: �Sean k y n dos números naturales,con k ≤ n. Sea N un conjunto con n elementos, Nk el conjunto de todos los subconjuntos de Ncon exactamente k elementos. Sea f : Nk → M una función con la propiedad f(K1) 6= f(K2) siK1 ∩K2 = ∅. Sea m(k, n, f) el número de elementos de M y, m(k, n) = mınf m(k, n, f). Pruebe quepara k �jo, existen números m0 = m0(k) y n0 = n0(k) tales que m(k, n) = n−m0 para n ≥ n0. Aquí,m0(k) ≥ 2k − 2 y n0(k) ≥ 2k − 1; ambas desigualdades probablemente se tienen con igualdad.�
Vamos a reformular el problema en términos de teoría de grafos: Tomamos N = [n], Nk =(
[n]k
)y, éste último conjunto, será el conjunto de vértices de un grafo, donde dos vértices v1, v2 ∈
([n]k
)están
conectados por una arista si v1 ∩ v2 = ∅. Así, la función f de antes se vuelve un coloramiento delgrafo y M es el conjunto de colores; de tal manera que la conjetura de Kneser se traduce en hallar elnúmero cromático del grafo así de�nido, al cual, por razones obvias, llamaremos el grafo de Kneserde(
[n]k
)y, lo notaremos por KGn,k. Resumiendo, nuestro problema queda:
χ(KGn,k) = n−m0 = n− 2k + 2, paran ≥ 2k − 1
.
Ejemplo 1.1. KGn,1 es el grafo completo Kn y, χ(Kn) = n = n− (2 · 1) + 2.
KG2k−1,k es un grafo sin aristas, pues, no hay dos k−subconjuntos de 2k− 1 disyuntos. Luego,χ(KG2k−1,k) = 1 = 2k − 1− 2k + 2.
En el caso de KG2k,k cada conjunto en(
[2k]k
)está conectado a su complemento y no más. Así,
χ(KG2k,k) = 2 = 2k − 2k + 2, ∀k ≥ 1.
KG5,2 resulta ser el grafo de Petersen. Nuevamente, se puede veri�car que χ(KG5,2) = 5− (2 ·2) + 2 = 3
16

Figura 1.1: KG5,2
Finalmente, formularemos el problema desde ahora como un teorema pues, en lo subsecuente,daremos dos demostraciones.
Teorema 1.1 (Teorema de Lovász-Kneser). Para todo k > 0 y n ≥ 2k−1, el número cromáticodel grafo de Kneser KGn,k es n− 2k + 2.
1.1.1. Uso del teorema de Borsuk-Ulam
Cualquier prueba conocida del teorema 1.1 usa alguna versión equivalente del Teorema deBorsuk-Ulam, por eso, queremos mencionar las que fueron y nos serán útiles para demostrarlo.
Teorema 1.2. Para todo n ≥ 0, las siguientes a�rmaciones son equivalentes.
BU1 (Borsuk-Ulam 1) Para toda función continua f : Sn → Rn existe un punto x ∈ Sn tal quef(x) = f(−x).
BU2 (Borsuk-Ulam 2) Para toda función continua f : Sn → Rn tal que f(−x) = −f(x) para todox ∈ Sn existe un punto x ∈ Sn que satisface f(x) = 0.
BU3 (Borsuk-Ulam 3) No existe ninguna función continua f : Sn → Sn−1 tal que f(−x) = −f(x)para todo x ∈ Sn.
LS-c (Teorema de Lusternik-Schnirelmann para cerrados) Para cualquier cubrimiento de laesfera Sn por cerrados F1, . . . , Fn+1, existe al menos un i tal que x,−x ∈ Fi o Fi ∩ (−Fi) 6= ∅.
17
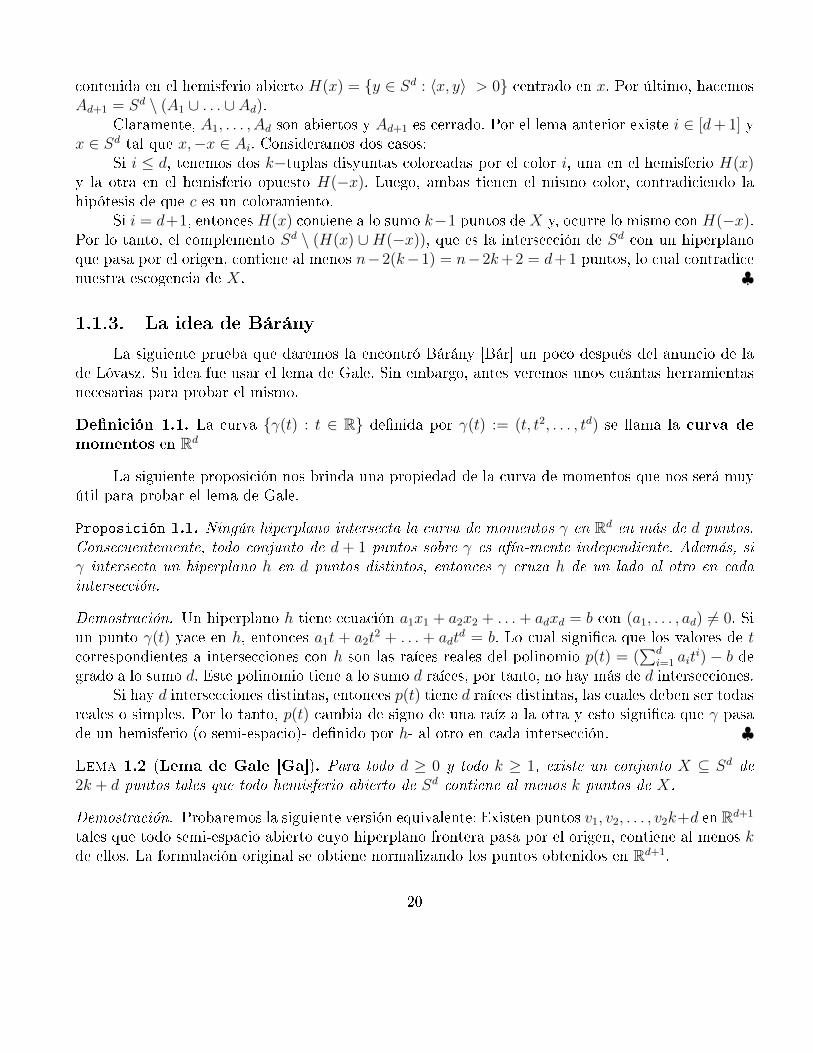
Demostración. [BU1] =⇒ [BU2]: Si f(−x) = −f(x) para todo x ∈ Sn, entonces f(y) = f(−y) paraalgún y ∈ Sn por Borsuk-Ulam 1, de donde se deduce f(y) = −f(y), luego, f(y) = 0.BU2=⇒BU1: Sea f : Sn → Rn una función continua. Aplicamos BU2 a la función g(x) := f(x) −f(−x) y se tiene lo requerido.BU2=⇒BU3: Una función continua f : Sn → Sn−1 ⊆ Rn con la propiedad f(−x) = −f(x) para todox ∈ Sn cumple también f(x) = 0 para algún x por BU2. Como 0 /∈ Sn−1, se deduce BU3.BU3=⇒BU2: Supongamos que f : Sn → Rn es una función continua que nunca se anula y quecumple con la propiedad f(−x) = −f(x) para todo x ∈ Sn. Entonces, la función g(x) := f(x)/‖f(x)‖contradice BU3.BU1=⇒LS-c: Para un cubrimiento de cerrados F1, . . . , Fn, de�nimos una función continua f : Sn →Rd como f(x) = (d(x, F1), . . . , dist(x, Fn)) y, usando la hipótesis, sea x ∈ Sn tal que f(x) = f(−x) =y. Si la i-ésima coordenada del punto y es cero, entonces x y −x están en Fi. Si todas las coordenadasde y son no nulas, entonces x,−x ∈ Fn+1.LS-c=⇒BU3: Consideramos la frontera de un n−simplejo en Rn que contenga al cero en su interior.Si lo in�amos (es decir, si normalizamos cada uno de los puntos sobre ella) y tomamos las n + 1caras cerradas de dimensión n− 1 obtenemos un cubrimiento de la esfera por F1, . . . , Fn+1 cerradostal que ningún Fi contiene un par de puntos antipodales. Si existiera una función f : Sn → Sn−1 conla propiedad f(−x) = −f(x) para todo x ∈ Sn, tendríamos que f−1(F1), . . . , f−1(Fn+1) sería unacolección de cerrados que contradiría LS-c, pues, si existiera i tal que x,−x ∈ f−1(Fi), entonces f(x)y f(−x) = −f(x) estarían en Fi, contradiciendo la construcción de los Fi. ♣
Figura 1.2: 3-simplejo y las respectivas caras. En este caso, si in�amos el simplejo, obtendríamosF1, . . . , F6 como cubrimiento de S2
Lema 1.1 (Teorema generalizado de Lusternik-Schnirelmann). Dado un cubrimiento de Sn
por n + 1 conjuntos A1, . . . , An+1, donde cada Ai es abierto o cerrado, se tiene que existe i tal que
18

Ai ∩ (−Ai) 6= ∅
Demostración. Hacemos inducción en el número de cerrados t. Para el caso base t = 0, por com-pacidad de Sn podemos escoger (por el lema del número de Lebesgue) un real δ > 0 tal que parax ∈ Sn, B(x, δ) (la bola cerrada centrada en x de radio δ) está contenida en Ai para algún i ∈ [n+1].Ahora bien, Sn =
⋃x∈Sn
B(x, δ), luego, de nuevo por compacidad, existe una conjunto I �nito tal
que {B(xi, δ)}i∈I cubre la esfera. De�nimos para cada j ∈ [n + 1], el conjunto Fj como la unión
de los B(x, δ) que están contenidos en Aj. Claramente, cada Fj es cerrado, está contenido en Aj y{Fj}j∈[n+1] cubre la esfera. Por la versión cerrada del teorema de Lusternik-Schinerlmann tenemosque existe algún j tal que Fj ∩ (−Fj) 6= ∅; lo cual implica que Aj ∩ (−Aj) 6= ∅.Supongamos que 0 < t < n + 1 y que el teorema es cierto para k < t. Veamos que también se tienepara t conjuntos cerrados: Sea C = {Ai}i∈[n+1] un cubrimiento de la esfera donde hay t cerrados;�jemos un conjunto cerrado Ak de tal manera que no contenga un par de puntos antipodales (esdecir, Ak ∩ (−Ak) = ∅). Entonces, diam(Ak) = 2− ε para algún ε > 0. De�nimos el conjunto abiertoU como {x ∈ Sn : d(x,Ak) < ε/2} ⊇ Ak, notamos que diam(U) < ε/2 + (2 − ε) + ε/2 = 2 y portanto, U no contiene puntos antipodales. Así, (C \Ak)∪U es un cubrimiento de la esfera donde hayt− 1 cerrados exactamente. Por hipótesis de inducción, existe un conjunto que contiene dos puntosantipodales. Como tal conjunto es distinto de U , tenemos que debe estar en el cubrimiento inicial C,quedando demostrado el caso inductivo. ♣
1.1.2. La solución de Greene
La primera prueba de la conjetura de Kneser se debe a Lovász [Lov], sin embargo, por cuestionesde brevedad, aquí daremos una prueba (levemente modi�cada) que dio Joshua Greene [Gre] en 2002.
Prueba del teorema: cota superior para el número cromático.Coloreamos los vértices del grafode Kneser así:
χ(F ) := mın{mın(F ), n− 2k + 2}.
Claramente, esta función asigna un color χ(F ) ∈ {1, 2, . . . , n− 2k+ 2} a cada subconjunto F ∈(
[n]k
).
Si dos subconjuntos F, F ′ reciben el mismo color i < n−2k+2, entonces {i} ⊆ F∩F ′ por la de�niciónde χ. Si reciben el color n−2k+2, entonces ambos están contenidos en el conjunto {n−2k+2, . . . , n},el cual tiene 2k−1 elementos y, por lo tanto, F ∩F ′ 6= ∅. De esta manera, no hay aristas que conectena F, F ′. Concluimos que χ es un n− 2k + 2−coloramiento de KGn,k.
Ahora, hacemos d := n−2k+1 y seaX ⊆ Sd un conjunto de n puntos tal que ningún hiperplanoque pase por el origen contiene más de d puntos de X. Esto se puede ver si pensamos en un conjuntode n elementos donde cualesquiera d puntos son afín-mente independientes o están en posición engeneral.
Supongamos que el conjunto de vértices de KGn,k es(Xk
)en lugar de
([n]k
)(identi�camos los
puntos de X con puntos de [n]) y vamos a hacer la prueba por contradicción: supongamos que existeun coloramiento c de KGn,k con d = n − 2k + 1 colores. De�nimos los conjuntos A1, . . . , Ad ⊆ Sd
como sigue: para un punto x ∈ Sd, x ∈ Ai si existe al menos una k-tupla F ∈(Xk
)de color i
19
contenida en el hemisferio abierto H(x) = {y ∈ Sd : 〈x, y〉 > 0} centrado en x. Por último, hacemosAd+1 = Sd \ (A1 ∪ . . . ∪ Ad).
Claramente, A1, . . . , Ad son abiertos y Ad+1 es cerrado. Por el lema anterior existe i ∈ [d+ 1] yx ∈ Sd tal que x,−x ∈ Ai. Consideramos dos casos:
Si i ≤ d, tenemos dos k−tuplas disyuntas coloreadas por el color i, una en el hemisferio H(x)y la otra en el hemisferio opuesto H(−x). Luego, ambas tienen el mismo color, contradiciendo lahipótesis de que c es un coloramiento.
Si i = d+1, entonces H(x) contiene a lo sumo k−1 puntos de X y, ocurre lo mismo con H(−x).Por lo tanto, el complemento Sd \ (H(x) ∪H(−x)), que es la intersección de Sd con un hiperplanoque pasa por el origen, contiene al menos n−2(k−1) = n−2k+ 2 = d+ 1 puntos, lo cual contradicenuestra escogencia de X. ♣
1.1.3. La idea de Bárány
La siguiente prueba que daremos la encontró Bárány [Bár] un poco después del anuncio de lade Lóvasz. Su idea fue usar el lema de Gale. Sin embargo, antes veremos unos cuántas herramientasnecesarias para probar el mismo.
De�nición 1.1. La curva {γ(t) : t ∈ R} de�nida por γ(t) := (t, t2, . . . , td) se llama la curva demomentos en Rd
La siguiente proposición nos brinda una propiedad de la curva de momentos que nos será muyútil para probar el lema de Gale.
Proposición 1.1. Ningún hiperplano intersecta la curva de momentos γ en Rd en más de d puntos.Consecuentemente, todo conjunto de d + 1 puntos sobre γ es afín-mente independiente. Además, siγ intersecta un hiperplano h en d puntos distintos, entonces γ cruza h de un lado al otro en cadaintersección.
Demostración. Un hiperplano h tiene ecuación a1x1 + a2x2 + . . .+ adxd = b con (a1, . . . , ad) 6= 0. Siun punto γ(t) yace en h, entonces a1t + a2t
2 + . . . + adtd = b. Lo cual signi�ca que los valores de t
correspondientes a intersecciones con h son las raíces reales del polinomio p(t) = (∑d
i=1 aiti) − b de
grado a lo sumo d. Este polinomio tiene a lo sumo d raíces, por tanto, no hay más de d intersecciones.Si hay d intersecciones distintas, entonces p(t) tiene d raíces distintas, las cuales deben ser todas
reales o simples. Por lo tanto, p(t) cambia de signo de una raíz a la otra y esto signi�ca que γ pasade un hemisferio (o semi-espacio)- de�nido por h- al otro en cada intersección. ♣
Lema 1.2 (Lema de Gale [Ga]). Para todo d ≥ 0 y todo k ≥ 1, existe un conjunto X ⊆ Sd de2k + d puntos tales que todo hemisferio abierto de Sd contiene al menos k puntos de X.
Demostración. Probaremos la siguiente versión equivalente: Existen puntos v1, v2, . . . , v2k+d en Rd+1
tales que todo semi-espacio abierto cuyo hiperplano frontera pasa por el origen, contiene al menos kde ellos. La formulación original se obtiene normalizando los puntos obtenidos en Rd+1.
20

La construcción de los puntos usa la curva de momentos, pero, levantada una dimensión supe-rior, en el hiperplano x1 = 1, es decir:
γ = {(1, t, t2, . . . , td) ∈ Rd+1 : t ∈ R}
Tomamos 2k + d puntos distintos cualesquiera en γ y los llamamos w1, w2, . . . , w2k+d de acuerdo alorden que aparezcan a lo largo de la curva. Por ejemplo, podemos tomar wi := γ(i) para 1 ≤ i ≤2k+d. Llamamos a los puntos w2, w4, . . . pares y a los puntos w1, w3, . . . impares. Además, de�nimosvi := (−1)iwi
Sea h un hiperplano que pasa por el origen, y sean h⊕ y h los dos semi-espacios abiertosdeterminados por h. Queremos ver que ambos h⊕ y h contienen al menos k puntos de la colecciónde los vi. Hacemos el argumento para h⊕: como vi = wi para i par y vi = −wi para i impar,necesitamos probar que el número de puntos pares wi en h
⊕ más el número de puntos impares wi enh es al menos k.
Por la proposición 1.1 vemos que h intersecta γ en no más de d puntos. Además, si hay dintersecciones, entonces γ atraviesa h en cada una de las intersecciones.
Dado un hiperplano arbitrario h que pasa por el origen, lo movemos continuamente a unaposición donde éste contenga el origen y exactamente d puntos de W := {w1, . . . , w2k+d de talmanera que ningún punto de W cruce de un lado al otro durante el movimiento. Lo hacemos así:Después de tener j < d puntos de W en h, rotamos h alrededor de algún d − 2−espacio afín quecontenga estos puntos y al origen, hasta encontrar otro punto de W .
Podemos, por lo tanto, suponer que h intersecta a γ en exactamente d puntos, todos elementosde W . Sea Won el subconjunto de los d puntos de W que yacen en h y, sea Woff := W \Won. En cadapunto de Won, γ cruza de un semi-espacio de h al otro.
Coloreamos un wi ∈ Woff negro si bien es par y está en h⊕ o si es impar y está en h. De locontrario, coloreamos wi blanco. Veamos que a lo largo de γ, puntos blancos y negros de Woff sealternan: Sean w,w′ dos puntos consecutivos de Woff a lo largo de γ con j puntos de Won entre ellos.Para j par, ambos w y w′ están en el mismo semi-espacio y uno de ellos es impar y el otro es par, luego,uno es blanco y el otro es negro. Si j es impar, entonces w y w′ están en diferentes semi-espacios,pero, ambos son pares o impares, por tanto, uno es blanco y el otro es negro. Notemos que wi ∈ Woff
y es negro si y sólo si vi = wi ∈ h⊕, para i par o, si vi = −wi ∈ h⊕ para i impar; en cualquier caso,vi ∈ h⊕ y, similarmente, wi ∈ Woff y es blanco si y sólo si vi ∈ h. Luego, por construcción, hay 2kpuntos en Woff y hay tantos blancos como negros (por la observación anterior); en resumen, hay kpuntos vi a cada lado del h movido. De esta manera, el número de puntos negros (y blancos) en elWoff inicial, es decir, el que resulta sin mover continuamente h, es al menos b1
2|Woff |c ≥ k, que era lo
requerido. ♣
Prueba de Bárány del teorema de Lovász-Kneser
[Bár]. Consideramos el grafo de Kneser KGn,k y hacemos d := n − 2k (como se puede ver, estadimensión es una menor que la de la primera prueba). Sea X ⊆ Sd el conjunto como en el lema de
21
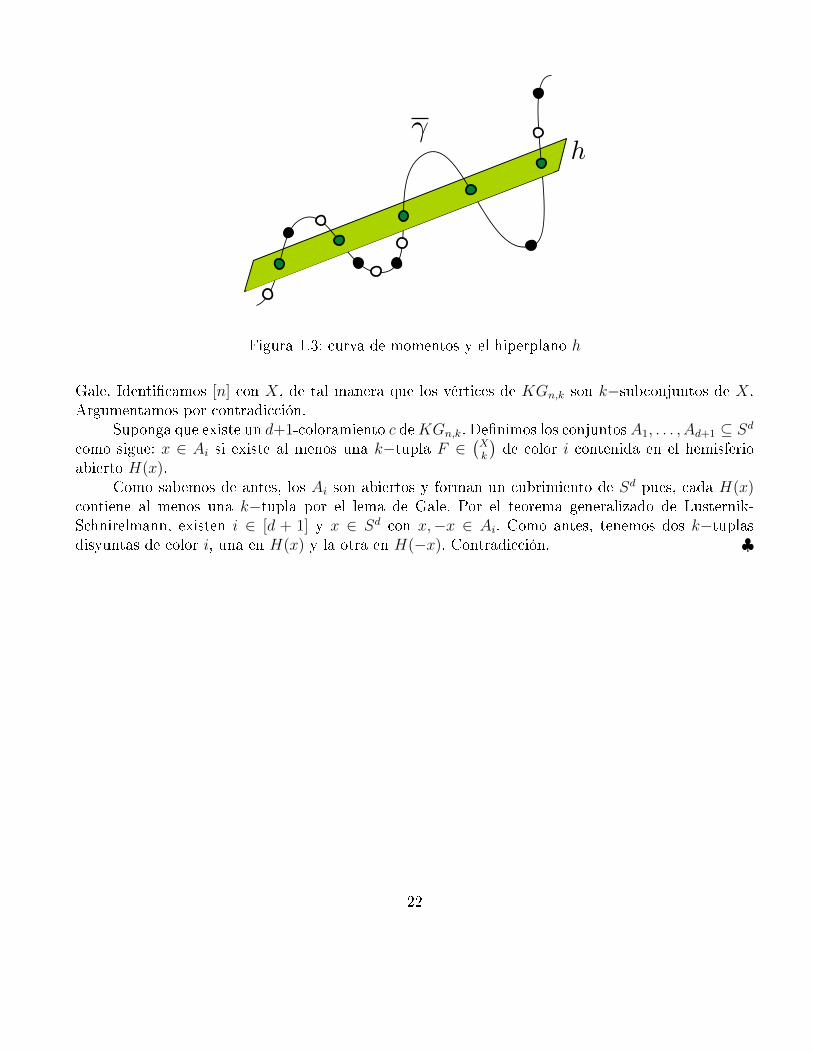
Figura 1.3: curva de momentos y el hiperplano h
Gale. Identi�camos [n] con X, de tal manera que los vértices de KGn,k son k−subconjuntos de X.Argumentamos por contradicción.
Suponga que existe un d+1-coloramiento c deKGn,k. De�nimos los conjuntos A1, . . . , Ad+1 ⊆ Sd
como sigue: x ∈ Ai si existe al menos una k−tupla F ∈(Xk
)de color i contenida en el hemisferio
abierto H(x).Como sabemos de antes, los Ai son abiertos y forman un cubrimiento de Sd pues, cada H(x)
contiene al menos una k−tupla por el lema de Gale. Por el teorema generalizado de Lusternik-Schnirelmann, existen i ∈ [d + 1] y x ∈ Sd con x,−x ∈ Ai. Como antes, tenemos dos k−tuplasdisyuntas de color i, una en H(x) y la otra en H(−x). Contradicción. ♣
22
Capítulo 2
El índice Z2
2.1. Joins
Nuestra primera idea de join viene de querer hacer que el producto cartesiano de dos complejossimpliciales X, Y sea de nuevo un complejo simplicial. Para hacemos la siguiente convención: SiA,B son conjuntos cualesquiera, escribimos A ] B := (A × {1}) ∪ (B × {2}). Claramente, A ] Bes una unión disyunta de ambos, sin embargo, A ] B 6= B ] A. En general, A1 ] A2 ] · · · ] An =(A1 × {1}) ∪ (A2 × {2}) ∪ · · · ∪ (An × {n}).
De�nición 2.1 (Join de complejos simpliciales). Sean K, L complejos simpliciales abstractos. El joinK ∗ L de K y L es el complejo simplicial con conjunto de vértices V (K) ] V (L) y con conjunto desimplejos {F ]G : F ∈ K, G ∈ L}.
La operación join es asociativa en el sentido de que si K, L,M son complejos simpliciales, entoncesK∗(L∗M) ∼= (K∗L)∗M. De esta manera, podemos omitir los paréntesis y escribir solamente K∗L∗M.De�nimos también el join de orden n de K como:
K∗n := K ∗ · · · ∗ K︸ ︷︷ ︸n veces
∼= {F1 ] · · · ] Fn : F1, . . . , Fn ∈ K}
Notemos que K∗n tiene n · |V (K)| vértices, una copia de V (K) por cada factor. Por ejemplo, parasimplejos se tiene que σk ∗ σl ∼= σk+l+1 y (σ0)∗n ∼= σn−1. Aquí, σ0 es un solo punto.
Ejemplo 2.1. Sea D2 = {∅, {1}, {2}} un complejo simplicial. Consideramos el join de orden n, D∗n2(Notemos que ‖D2‖ = S0):El conjunto de vértices se puede identi�car con [2]× [n]. Un subconjunto de este conjunto de vérticeses un simplejo si y sólo si no contiene ambos (1, i) y (2, i), i ∈ [n]. Por de�nición, este complejosimplicial corresponde a ♦n−1. De tal manera que:
‖D∗n2 ‖ ∼= Sn−1.
23
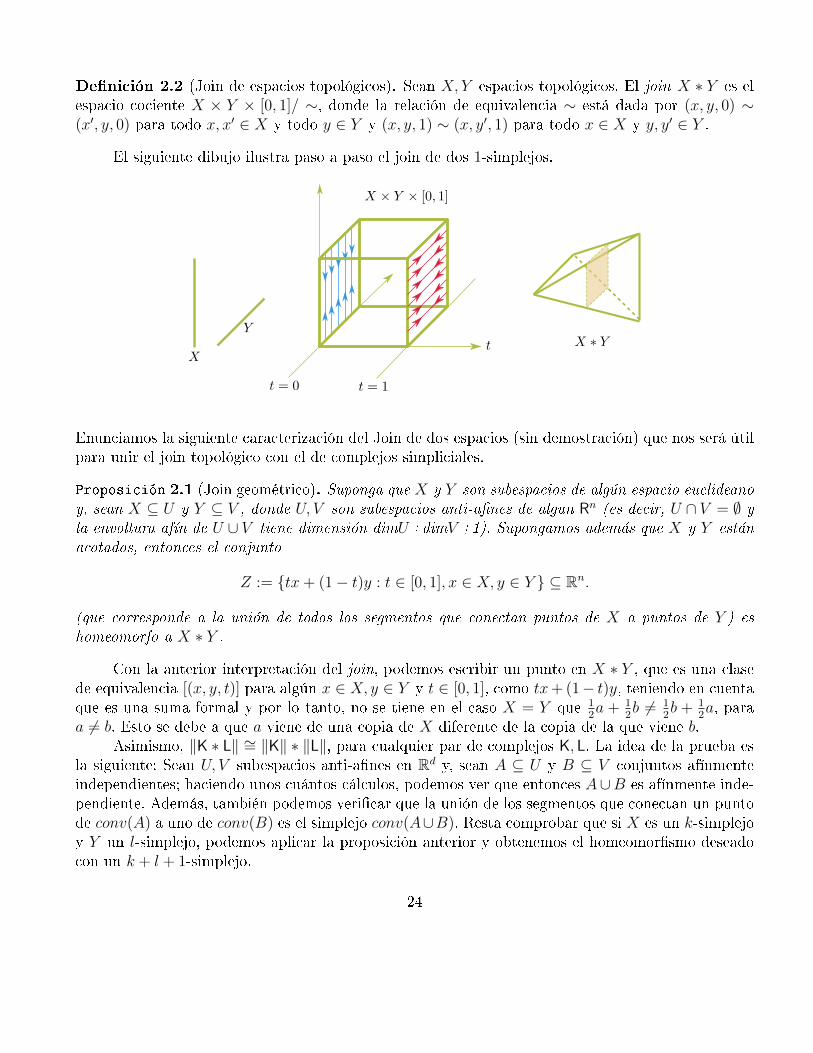
De�nición 2.2 (Join de espacios topológicos). Sean X, Y espacios topológicos. El join X ∗ Y es elespacio cociente X × Y × [0, 1]/ ∼, donde la relación de equivalencia ∼ está dada por (x, y, 0) ∼(x′, y, 0) para todo x, x′ ∈ X y todo y ∈ Y y (x, y, 1) ∼ (x, y′, 1) para todo x ∈ X y y, y′ ∈ Y .
El siguiente dibujo ilustra paso a paso el join de dos 1-simplejos.
Enunciamos la siguiente caracterización del Join de dos espacios (sin demostración) que nos será útilpara unir el join topológico con el de complejos simpliciales.
Proposición 2.1 (Join geométrico). Suponga que X y Y son subespacios de algún espacio euclideanoy, sean X ⊆ U y Y ⊆ V , donde U, V son subespacios anti-a�nes de algun Rn (es decir, U ∩ V = ∅ yla envoltura afín de U ∪ V tiene dimensión dimU+dimV+1). Supongamos además que X y Y estánacotados, entonces el conjunto
Z := {tx+ (1− t)y : t ∈ [0, 1], x ∈ X, y ∈ Y } ⊆ Rn.
(que corresponde a la unión de todos los segmentos que conectan puntos de X a puntos de Y ) eshomeomorfo a X ∗ Y .
Con la anterior interpretación del join, podemos escribir un punto en X ∗ Y , que es una clasede equivalencia [(x, y, t)] para algún x ∈ X, y ∈ Y y t ∈ [0, 1], como tx+ (1− t)y, teniendo en cuentaque es una suma formal y por lo tanto, no se tiene en el caso X = Y que 1
2a + 1
2b 6= 1
2b + 1
2a, para
a 6= b. Esto se debe a que a viene de una copia de X diferente de la copia de la que viene b.Asimismo, ‖K ∗ L‖ ∼= ‖K‖ ∗ ‖L‖, para cualquier par de complejos K, L. La idea de la prueba es
la siguiente: Sean U, V subespacios anti-a�nes en Rd y, sean A ⊆ U y B ⊆ V conjuntos afínmenteindependientes; haciendo unos cuántos cálculos, podemos ver que entonces A∪B es afínmente inde-pendiente. Además, también podemos veri�car que la unión de los segmentos que conectan un puntode conv(A) a uno de conv(B) es el simplejo conv(A∪B). Resta comprobar que si X es un k-simplejoy Y un l-simplejo, podemos aplicar la proposición anterior y obtenemos el homeomor�smo deseadocon un k + l + 1-simplejo.
24

Nota. El join de espacios es conmutativo y asociativo, en el sentido de que X ∗ Y ∼= Y ∗ X yX ∗ (Y ∗Z) ∼= (X ∗Y )∗Z. Si usamos el ejemplo 2.1 y hacemos K = Sk, L = Sl en ‖K∗L‖ ∼= ‖K‖∗‖L‖,obtenemos que (S0)∗n ∼= Sn−1 y Sk ∗ Sl ∼= Sk+l+1.
De�nición 2.3. Dadas dos funciones continuas f : X1 → X2 y g : Y1 → Y2, el join de f y g,
f ∗ g : X1 ∗ Y1 → X2 ∗ Y2
se de�ne como:(f ∗ g)(tx+ (1− t)y) = tf(x) + (1− t)g(y)
.
2.2. Espacios-Z2 y funciones-Z2 o equivariantes
De�nición 2.4. Un espacio-Z2 es una pareja (X, ν), donde X es un espacio topológico yν : X → X un homeomor�smo, llamado la acción-Z2 en X, tal que ν2 = ν ◦ ν = idX .
La acción-Z2 es libre si no tiene puntos �jos, es decir, ν(x) 6= x para todo x ∈ X. En tal caso,decimos también que el espacio-Z2 es libre.
Si (X, ν) y (Y, ω) son espacios-Z2, una función-Z2 o equivariante f : (X, ν) → (Y, ω) es unafunción continua que conmuta con las acciones-Z2: para todo x ∈ X, tenemos que f(ν(x)) =ω(f(x)). La anterior de�nición de función equivariante se puede ver en el siguiente diagramaconmutativo:
Xf //
�
Y
ω��
Xf// Y
Ejemplos de Z2 espacios son (Sn,−) y (Rn,−), donde − denota el homomor�smo x 7−→ −x,que llamaremos acción antipodal. En este caso, el primer espacio es libre, pero, el segundo no.
Un Z2-complejo simplicial es un complejo simplicial K con una función simplicial ν : V (K)→V (K) tal que ‖ν‖ es una acción-Z2 en ‖K‖.
Ejemplo 2.2. Join de espacios-Z2. Si (X, ν) y (Y, ω) son espacios-Z2, podemos considerar laacción-Z2 dada por ν ∗ ω. Claramente, si ν y ω son libres, entonces ν ∗ ω es libre.
Ejemplo 2.3 (acción-Z2 en X × X). Sea X cualquier espacio. La función ν : X × X → X × Xde�nida por (x, y) 7→ (y, x) es una acción-Z2.
Ejemplo 2.4 (acción Z2 en X ∗X). Similarmente, podemos de�nir una acción-Z2 en X ∗X comotx+ (1− t)y 7→ (1− t)y + tx.
25

2.3. El índice Z2
Sean (X, ν) y (Y, ω) espacios Z2. Escribimos
XZ2−→ Y
si existe una función equivariante de X a Y y,
XZ29 Y
si no existe tal. Por ejemplo, el teorema de Borsuk-Ulam nos dice que SnZ29 Sn−1.
Por otro lado,la relaciónZ2−→ es transitiva y,en ciertas ocasiones, puede ser útil ver que si
XZ2−→ Y entonces Y es tan grande como X. En este sentido, los espacios no libres no son de mayor
interés, pues, si (Y, ω) es tal que ω(y0) = y0, entonces XZ2−→ Y para todo espacio X: tomemos la
función f que envía todo X a y0 y, por lo tanto,ω(f(x)) = f(x) = y0 = f(ν(x)).
De�nición 2.5 (El índice Z2 ). Sea (X, ν) un espacio-Z2. El índice-Z2 de (X, ν) se de�ne como:
indZ2(X) := mın{n ∈ {0, 1, 2, . . .} : XZ2−→ Sn}.
Sn se toma con la acción-Z2 antipodal.
El índice-Z2 puede ser un número natural o ∞: Por ejemplo, si X es un espacio-Z2 no libre,entonces, v(y) = y para algún y ∈ X y dada una función f : X → Sn, para que se cumpla lacondición de equivariante debe ocurrir −f(y) = f(v(y)) = f(y), luego f(y) = 0 /∈ Sn.
Proposición 2.2 (Propiedades del índice-Z2). I Si XZ2−→ Y =⇒ indZ2(X) ≤ indZ2(Y ).
II indZ2(Sn) = n para todo n ≥ 0 (Sn con la acción antipodal).
III indZ2(X ∗ Y ) ≤ indZ2(X) + indZ2(Y ) + 1.
IV Si X es (n− 1)−conexo, entonces indZ2(X) ≥ n.
V Si K es un Z2-complejo simplicial libre de dimensión n, entonces indZ2(K) ≤ n.
Demostración. I. Si existen funciones f : Y → Sn, g : X → Y equivariantes, entonces g ◦ ftambién lo es, pues, el siguiente diagrama también conmuta:
Xg //
�
Y
ω��
X g// Y
f //
ω��
Sn
−��
Yf// Sn
Por lo tanto, indZ2(X) ≤ indZ2(Y )
26
II. Por BU3, sabemos que SnZ29 Sn−1, como la acción antipodal en Sn es equivariante, concluimos
que indZ2(Sn) = n.
III. Se sigue fácilmente del hecho de que Sn ∗ Sm ∼= Sn+m+1.
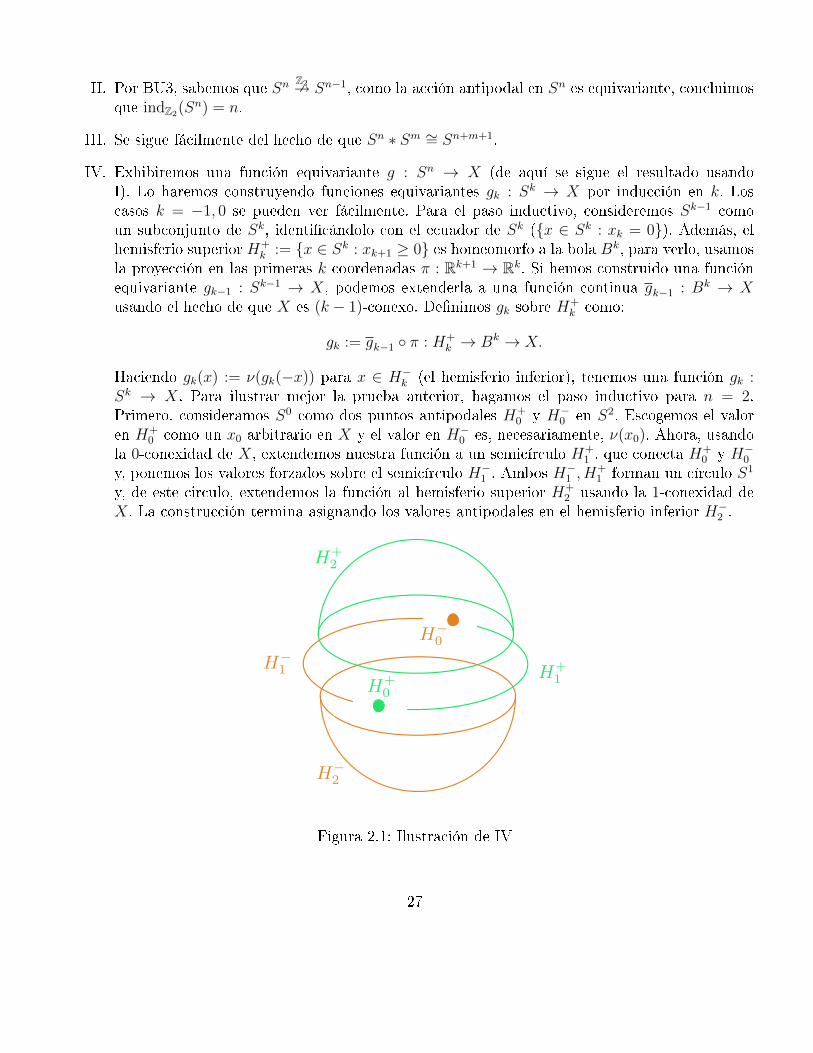
IV. Exhibiremos una función equivariante g : Sn → X (de aquí se sigue el resultado usandoI). Lo haremos construyendo funciones equivariantes gk : Sk → X por inducción en k. Loscasos k = −1, 0 se pueden ver fácilmente. Para el paso inductivo, consideremos Sk−1 comoun subconjunto de Sk, identi�cándolo con el ecuador de Sk ({x ∈ Sk : xk = 0}). Además, elhemisferio superior H+
k := {x ∈ Sk : xk+1 ≥ 0} es homeomorfo a la bola Bk, para verlo, usamosla proyección en las primeras k coordenadas π : Rk+1 → Rk. Si hemos construido una funciónequivariante gk−1 : Sk−1 → X, podemos extenderla a una función continua gk−1 : Bk → Xusando el hecho de que X es (k − 1)-conexo. De�nimos gk sobre H
+k como:
gk := gk−1 ◦ π : H+k → Bk → X.
Haciendo gk(x) := ν(gk(−x)) para x ∈ H−k (el hemisferio inferior), tenemos una función gk :Sk → X. Para ilustrar mejor la prueba anterior, hagamos el paso inductivo para n = 2.Primero, consideramos S0 como dos puntos antipodales H+
0 y H−0 en S2. Escogemos el valoren H+
0 como un x0 arbitrario en X y el valor en H−0 es, necesariamente, ν(x0). Ahora, usandola 0-conexidad de X, extendemos nuestra función a un semicírculo H+
1 , que conecta H+0 y H−0
y, ponemos los valores forzados sobre el semicírculo H−1 . Ambos H−1 , H+1 forman un círculo S1
y, de este circulo, extendemos la función al hemisferio superior H+2 usando la 1-conexidad de
X. La construcción termina asignando los valores antipodales en el hemisferio inferior H−2 .
Figura 2.1: Ilustración de IV
27

V. Aquí necesitamos construir una función equivariante g : ‖K‖ → Sn para todo Z2-complejosimplicial con dimK = n. Además, usaremos dos hechos: el primero es que la esfera Sn es(n− 1)-conexa (Proposición 0.4) y, dados un complejo simplicial K y ‖ν‖ una acción-Z2 libre,se tiene entonces que F ∩ ν(F ) = ∅ para todo F ∈ K. El siguiente argumento sigue la mismalínea de la prueba de IV.
Construimos funciones equivariantes gk : ‖K≤k‖ → Y por inductivamente para k = 0, 1, . . . , n.Después de construir gk−1, dividimos los simplejos k-dimensionales en K en clases de equiva-lencia, las órbitas que resultan por la acción-Z2. Por el comentario al iniciar la prueba, cadaclase consiste de dos simplejos disyuntos F y ν(F ).Escogemos un simplejo de cada clase y, paraestos simplejos, extendemos gk−1 en el interior usando la (k − 1)-conexidad de Sn. Por último,de�nimos gk en los interiores relativos de los simplejos restantes como los antipodales de lossimplejos iniciales (tal y como lo hicimos antes).
♣
2.4. Joins borrados
Para probar que un grafo, visto como un 1-complejo simplicial, es no planar, se necesita probarque no hay una función continua e inyectiva f : ‖G‖ → R2. Normalmente, este tipo de pruebasestablecen algo más: cualquier f así debe identi�car dos puntos con soportes distintos; es decir,en cualquier dibujo en el plano, dos aristas no adyacentes se intersectan o bien una arista pasa através de un vértice no incidente a ella. Intentaremos establecer la imposibilidad de embeber algunoscomplejos simpliciales de dimensiones superiores, mostrando que que las imágenes de algún par decaras se deben intersectar.
El teorema topológico de Radon. Un resultado parecido a lo comentado es el teorema deBorsuk-Ulam, el cual a�rma, en particular, que no hay una función continua e inyectiva de Sd → Rd.Elteorema de Radon (versión topológica) es una versión de caras disyuntas del teorema de Borsuk-Ulampara la frontera del d + 1-simplejo. Las siguiente son ilustraciones para el caso d = 1 y d = 2. El
teorema a�rma lo siguiente:
28

Teorema 2.1 (Teorema topológico de Radon [BB]). Sea
f : ‖σd+1‖ → Rd
una función continua. Entonces, existen dos caras disyuntas F1, F2 de σd+1 tales que f(‖F1‖) ∩f(‖F2‖) 6= ∅.
Podemos expresar también el teorema anterior diciendo que existen puntos x1, x2 ∈ ‖σd+1‖ consoportes disyuntos y tales que f(x1) = f(x2).
Para probar el Teorema de Radon para complejos simpliciales, queremos entonces probar lano existencia de funciones f : ‖K‖ → Rd que satisfagan f(x1) 6= f(x2) para todas las parejas(x1, x2) ∈ X := {(x1, x2) ∈ ‖K‖ × ‖K‖ : supp(x1) ∩ supp(x2) = ∅}. A tales funciones las llamaremosmalas funciones.
Productos borrados. Si X es un espacio topológico, el producto borrado de X, denotado porX2
∆, es el espacioX2
∆ := (X ×X) \ {(x, x) : x ∈ X}
. La función g : (Rd)2∆ → Sd−1 de�nida por
(x, y) 7−→ x− y‖x− y‖
es una función equivariante, por lo tanto indZ2((Rd)2∆) ≤ d− 1, dándonos una cota superior para el
índice-Z2 de (Rd)2∆.
Informalmente, el join borrado de un complejo simplicial es un complejo simplicial que consistede los joins de todas las parejas ordenadas de simplejos disyuntos.
De�nición 2.6 (Join borrado de un complejo simplicial). Sea K un complejo simplicial. Eljoin borrado de K tiene como conjunto de vértices a V (K)× [2] y, viene dado por
K∗2∆ := {F1 ] F2 : F1, F2 ∈ K, F1 ∩ F2 = ∅} ⊆ K∗2.
El poliedro de K∗2∆ se puede escribir como
‖K∗2∆ ‖ = {tx1 + (1− t)x2 : x1, x2 ∈ ‖K‖, supp(x1) ∩ supp(x2) = ∅, t ∈ [0, 1]}
De esta manera, nos deshacemos de los puntos �jos que antes había en K∗2. Por ello, la acción-Z2
ν : tx1 + (1− t)x2 7→ (1− t)x2 + tx1 ahora convierte a K∗n∆ en un Z2-complejo simplicial libre.
Ejemplo 2.5. El join borrado (σ0)∗2∆ de un punto consiste de dos puntos disyuntos.
El join borrado (D2)∗2∆ del complejo simplicial D2 = {∅, {1}, {2}} ∼= S0 es la unión disyunta dedos aristas. Para ilustrarlo, el siguiente dibujo muestra de derecha izquierda la unión disyuntade dos copias de S0, el join de ellos y luego el join borrado.
29

Los simplejos maximales son {a} ] {b} y {b} ] {a}. La acción-Z2 ν los intercambia.
Sea σ1 el simplejo 1-dimensional con vértices a y b. El join borrado (σ1)∗2∆ es el perímetro de uncuadrado. Como antes, el siguiente diagrama ilustra paso a paso el proceso para construirlo.Primero, partimos de la unión disyunta de dos aristas, su join es un tetraedro y luego mostramosel join. Los 1-simplejos maximales son ∅ ] {a, b}, {a, b} ] ∅, {a} ] {b}, {b} ] {a}.
Para probar el teorema de Radon, usaremos el siguiente resultado.
Lema 2.1. Sean K y L complejos simpliciales. Entonces
(K ∗ L)∗2∆∼= K∗2∆ ∗ L∗2∆ .
Demostración. Un simplejo en el lado izquierdo del isomor�smo tiene la forma (F1]G1)] (F2]G2),donde F1, F2 ∈ K, G1, G2 ∈ L y F1 ∩ F2 = G1 ∩ G2 = ∅. En el lado derecho, tenemos el simplejocorrespondiente, que es (F1 ] F2) ] (G1 ]G2), con las mismas condiciones sobre F1, F2, G1, G2. ♣
Corolario 2.1. ‖(σn)∗2∆ ‖ ∼= Sn
Demostración. Tenemos que σn ∼= (σ0)∗(n+1). Por el lema anterior y la nota en la página 25 obtenemosque
((σ0)∗(n+1))∗2∆∼= ((σ0)∗2∆ )∗(n+1) ∼= (S0)∗(n+1) ∼= Sn.
♣
30

Consideramos ahora una mala función f : ‖K‖ → Rd y el join f ∗2 : ‖K‖∗2 → (Rd)∗2; nosrestringimos al dominio ‖K∗2∆ ‖. ¾Qué podemos decir acerca de las imágenes de este subconjunto?:sabemos que tienen la forma
tf(x1) + (1− t)f(x2) ∈ (Rd)∗2,
donde t ∈ [0, 1], x1, x2 ∈ ‖K‖ y supp(x1)∩ supp(x2) = ∅. Por ser f mala, las imágenes están contenidasen
{ty1 + (1− t)y2 : t ∈ [0, 1], y1, y2 ∈ Rd, y1 6= y2} ⊆ (Rd)∗2 \ {12y + 1
2y : y ∈ Rd} =: Y.
y, estos dos últimos conjuntos tienen el mismo índice-Z2. Resumiendo, obtuvimos de una función
mala f : ‖K‖ → Rd una función equivariante f ∗2 : XZ2−→ Y , donde X = ‖K∗2∆ ‖.
La idea siguiente es acotar indZ2(Y ) por arriba. A Y lo llamaremos el join borrado de Rd y lodenotaremos por (Rd)∗2∆ . 1
Lema 2.2 (Join borrado de Rd). Existe una función equivariante g : (Rd)∗2∆ → Sd y, por lo tanto,ind((Rd)∗2∆ ) ≤ d.
Demostración. Exhibimos una función equivariante h : (Rd)∗2∆ → (Rd+1)2∆. Además, recordemos que
indZ2((Rd+1)∗2∆ ) ≤ d. La proposición 2.1 nos dice que el join Z1 ∗ Z2 se puede representar geomé-tricamente si Z1, Z2 se sitúan en algún Rn como subconjuntos acotados de dos espacios anti-a�nesU, V . En nuestro caso, Rd no está acotado, pero, podemos enviarlo homeomór�camente en una bolad-dimensional B, por ejemplo. Basta entonces con acotar el índice-Z2 de B
∗2∆ = B∗2\{1
2y+ 1
2y : y ∈ B}.
Para la representación geométrica necesitamos dos subespacios anti-a�nes d-dimensionales ypreservar la simetría-Z2, los escogemos entonces en R2d+2 = (Rd+1)2. De�nimos las funciones ψ, ϕ :Rd → R2d+2 como
ψ(x) := (1, x1, . . . , xd, 0, . . . , 0), ϕ(y) := (0, 0, . . . , 0, 1, y1, . . . , yd).
Entonces, U := ψ(Rd) y V := ϕ(Rd) son subespacios anti-a�nes d-dimensionales y, podemos insertarlas dos copias de la bola B en ellos: Z1 = ψ(B),Z2 = ϕ(B). De�nimos h : B∗2∆ → (Rd+1)2 como
h(tx+ (1− t)y) = tψ(x) + (1− t)ϕ(y).
Esta función es continua por la proposición 2.1, es equivariante e inyectiva en (Rd+1)2∆. Esto último
se debe a que si(t, tx1, . . . , txd) := (1− t, (1− t)y1, . . . , (1− t)yd)
entonces t = 1/2 y x = y. Pero, estos puntos fueron borrados de B∗2∆ ♣
Resumiendo, hemos probado que si f : ‖K‖ → Rd es una función mala, entonces ‖K∗2∆ ‖Z2−→
(Rd)∗2∆ y que indZ2((Rd)∗2∆ ) ≤ d. Luego:
1esta notación no es estándar, ver [Mat] página 114
31
Teorema 2.2 (índice del join borrado y no encajamiento). Sea K un complejo simplicial. Si
indZ2(K∗2∆ ) > d,
entonces, para toda función continua f : ‖K‖ → Rd, las imágenes de un par de caras de K seintersectan. En particular, Rd no contiene subespacios homeomorfos a K.
prueba del Teorema topológico de Radon. En este caso K = σd+1. Por el corolario 2.1, página 30, elíndice del join borrado K∗2∆ es d+ 1. Aplicando el teorema anterior, el teorema de Radon se sigue deinmediato. ♣
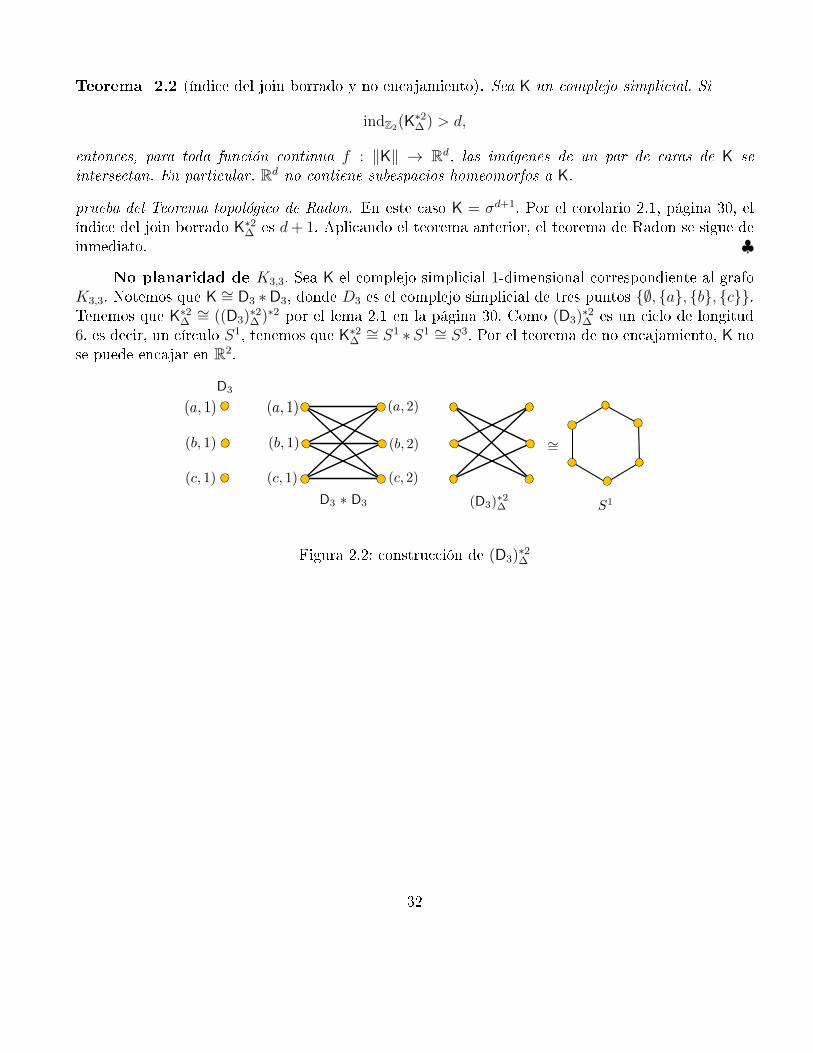
No planaridad de K3,3. Sea K el complejo simplicial 1-dimensional correspondiente al grafoK3,3. Notemos que K ∼= D3 ∗D3, donde D3 es el complejo simplicial de tres puntos {∅, {a}, {b}, {c}}.Tenemos que K∗2∆
∼= ((D3)∗2∆ )∗2 por el lema 2.1 en la página 30. Como (D3)∗2∆ es un ciclo de longitud6, es decir, un círculo S1, tenemos que K∗2∆
∼= S1 ∗S1 ∼= S3. Por el teorema de no encajamiento, K nose puede encajar en R2.
Figura 2.2: construcción de (D3)∗2∆
32

Bibliografía
[Bár] I. Bárány. A short proof of Kneser's conjecture. J. Combinatorial Theory, Ser. A, 25:325�326,1978
[BB] E. G. Bajmóczy y I. Bárány. A common generalization of Borsuk's and Radon's theorem. ActaMath. Hungarica, 34:347�350,1979.
[Ful] Fulton, William. Algebraic topology. A �rst course. Springer-Verlag New York,Inc. 1995
[Ga] D.Gale. Neighboring vertices on a convex polyhedron. In H.W Kuhn and A.W. Tucker, edi-tors, Linear inequalities and Related Systems, volume 38 of Annals of Math. Studies, 255�263,Princeton, 1956. Princeton University Press.
[Gre] J.E. Greene. A new short proof of Kneser's conjecture. Amer. Math. Monthly, 109: 918�920,2002.
[Hat] Hatcher, Allen. Algebraic topology. Cambridge University Press. 2002.
[Lov] L. Lovász. Kneser's conjecture, chromatic number and homotopy. J. Combinatorial Theory,Ser.A,25:319�324.
[Mat] Matousek, Jiri. Using the Borsuk-Ulam theorem Lectures on topological methods in combina-torics and geometry. Springer (Heidelberg), Abril 2003.
33