complete metric spaces - jianfei shen 行到水窮處 ...section 7.4 complete metric spaces 31 7.4...
TRANSCRIPT

SECTION 7.4 COMPLETE METRIC SPACES 31
7.4 Complete Metric Spaces
I Exercise 64 (9.40). Provide an example of a descending countable collection
of closed, nonempty sets of real numbers whose intersection is empty. Does this
contradict the Cantor Intersection Theorem?
Solution. Let X D .0; 1�. Let Fn D .0; 1=n� for all n 2 N. Then fFng1nD1 is a
descending countable collection of closed, nonempty sets; however,T1nD1 Fn D
¿. This does not contradict the Cantor intersection Theorem since .0; 1� is not
complete. ut
I Exercise 65 (9.41). Let � and � be equivalent metrics on a nonempty set X .
Show that .X; �/ is complete if and only if .X; �/ is complete.
Proof. Let � and � are equivalent metrics on X ¤ ¿; that is, there exists c > 0
such that �.x; y/=c 6 �.x; y/ 6 c�.x; y/ for all x; y 2 X . Suppose that .X; �/
is complete. Let fxng be a Cauchy sequence in .X; �/; that is, for every "0 > 0,
there exists N 2 N, such that
n;m > N H) �.xn; xm/ < "0=c:
But which means that �.xn; xm/ 6 c�.xn; xm/ < "0 for all n;m > N . So fxng is
Cauchy in .X; �/. Hence xn ! x 2 X in .X; �/ since .X; �/ is complete. We now
show that xn ! x in .X; �/, too.
Since xn ! x in .X; �/, for every " > 0, there existsK 2 N such that �.xk ; x/ <
"=c for all k > K. Hence, �.xk ; x/ 6 c�.xk ; x/ < " for all k > K; that is, xn ! x
in .X; �/. The other direction is similarly. ut
I Exercise 66 (9.42). Prove that the product of two complete metric spaces is
complete.
Proof. Let .X1; �1/ and .X2; �2/ be complete metric spaces; let X D X1 � X2,
and �.x;y/ D Œ�1.x1; y1/2 C �2.x2; y2/
2�1=2 for all x;y 2 X . We show that the
metric space .X; �/ is complete. Let fx.n/g be a Cauchy sequence in X . By the
definition of � we know that for i D 1; 2,
�i
�x.n/i ; x
.m/i
�6 �
�x.n/;x.m/
�:
Since the right-hand side tends to 0 as n;m!1, the sequence fx.n/i g is Cauchy
in .Xi ; �i /. Consequently there exists a point xi 2 Xi such that x.n/i ! xi . Let
x D .x1; x2/. We now show that x.n/ ! x. For every " > 0, there exists Ni 2 N
such that �i .x.n/i ; xi / < "=
p2 for all n > Ni . Define N D maxfN1; N2g. Then
��x.n/;x
�<�"2=2C "2=2
�1=2D ": ut
32 CHAPTER 7 METRIC SPACES: GENERAL PROPERTIES
I Exercise 67 (9.43). For a mapping f of the metric space .X; �/ to the metric
space .Y; �/, show that f is uniformly continuous iff for any two sequences fung
and fvng in X , if limn!1 �.un; vn/ D 0, then limn!1 �.f .un/; f .vn// D 0.
Proof. The “only if” part follows from the definition immediately. So we focus
on the “if” part. Suppose that f W X ! Y fails to be uniformly continuous. Then
there exists " > 0 and u 2 X such that for every n 2 N, there exists vn 2 X
with �.u; vn/ < 1=n but �.f .u/; f .vn// > ". Let un D u for all n 2 N. Then
limn!1 �.un; vn/ D 0, but limn!1 �.f .un/; f .vn// > " > 0. ut
I Exercise 68 (9.44). Use the outline below to prove the following extension
property for uniformly continuous mapping: Let X and Y be metric spaces,
with Y complete, and f a uniformly continuous mapping from a subset E of X
to Y . Then f has a unique uniformly continuous extension to a mapping xf ofxE to Y .
a. Show that f maps Cauchy sequences in E to Cauchy sequences in Y .
b. For x 2 xE, choose a sequence fxng in E that converges to x and define xf .x/ to
be the limit of ff .xn/g. Use Exercise 67 to show that xf .x/ is properly defined.
c. Show that xf is uniformly continuous on xE.
d. Show that the above extension is unique since any two such extensions are
continuous mappings on xE that take the same values on the dense subset E
of xE.
Proof. (a) Let fxng be a Cauchy sequence in .E; �/. Since f W .E; �/ ! .Y; �/
is uniformly continuous, there exists ı > 0 such that �.f .xn/; f .xm// < " if
�.xn; xm/ < ı. Since fxng is Cauchy in .E; �/, for this ı there exists N 2 N such
that �.xn; xm/ < ı whenever n;m > N . Therefore, for each " > 0, there exists
N 2 N such that
n;m > N H) �.f .xn/; f .xm// < "I
that is, ff .xn/g is Cauchy in .Y; �/.
(b) Take an arbitrary x 2 xE. If xn ! x and yn ! x, then �.xn; yn/ 6 �.xn; x/C
�.x; yn/ ! 0; hence, by Exercise 67, �.f .xn/; f .yn// ! 0; that is, limn f .xn/ D
limn f .yn/ (these limits exist since f is uniformly continuous). So xf is well-
defined, and xf .x/ D f .x/ for x 2 E.
(c) Let fung and fvng be two sequences in xE with �.un; vn/ ! 0. For each un,
where n 2 N, find u0n 2 E such that
��xf .un/; f .u
0n/�< 1=n:
Such an u0n exists since E is dense in xE. Similarly, for each vn find v0n 2 E such
that
��xf .vn/; f .v
0n/�< 1=n:

SECTION 7.5 COMPACT METRIC SPACES 33
Observe that we can take u0n sufficiently close to un, and take v0n sufficiently
close to vn. Thus, �.u0n; v0n/! 0. Then �.f .u0n/; f .v
0n//! 0. Therefore,
��xf .un/; xf .vn/
�6 �
�xf .un/; f .u
0n/�C �
�f .u0n/; f .v
0n/�C �
�f .v0n/;
xf .vn/�! 0I
that is, xf W xE ! Y is uniformly continuous.
(d) We have show in (a) that xf D f on E. ut
I Exercise 69 (9.45). Consider the countable collection of metric spaces f.Xn; �n/g1nD1.
For the Cartesian product of these sets Z D�1nD1Xn, define � on Z �Z by set-
ting, for x D fxng, y D fyng,
�.x;y/ D
1XnD1
2�n��n.xn; yn/ where each ��n D �n=.1C �n/:
a. Show that � is a metric.
b. Show that .Z; �/ is complete if and only if each .Xn; �n/ is complete.
Proof. (a) The same as Exercise 60.
(b) First suppose that .Z; �/ is complete. Let fx.k/n g1kD1 be a Cauchy sequence
in .Xn; �n/. Then for every " > 0 there exists N 2 N such that
k; j > N H) �n
�x.k/n ; x.j /n
�< ":
Define a sequence fx.k/g by setting x.k/m D um for all k and m ¤ n, where
um 2 Xm. Then
��x.k/;x.j /
�D 2�n
�n
�x.k/n ; x
.j /n
�1C �n
�x.k/n ; x
.j /n
� ! 0 as k; j !1I
that is, fx.k/g is Cauchy, and so x.k/ ! x D .u1; : : : ; un�1; xn; unC1; : : :/. Hence,
x.k/n ! xn. The other direction is clear. ut
7.5 Compact Metric Spaces
I Exercise 70 (9.70). Let K be a compact subset of the metric space .X; �/ and
x0 belong to X . Show that there is a point z 2 K for which �.z; x0/ 6 �.x; x0/ for
all x 2 K.
Proof. If x0 2 K, then let z D x0 and so �.z; x0/ D 0 6 �.x; x0/ for all x 2
K. Hence, we assume that x0 2 X X K. Since the function �.�; x0/ W K ! R is
continuous (since j�.y; x0/ � �.z; x0/j 6 j�.y; z/j D �.y; z/) and K is compact,
there exists z 2 argmin �.x; x0/. ut

34 CHAPTER 7 METRIC SPACES: GENERAL PROPERTIES
I Exercise 71 (9.71). Let K be a compact subset of the metric space X . For a
point x 2 X XK, show that there is an open set U containing K and an open set
O containing x for which U \O D ¿.
Proof. Since x 2 X X K, for each y 2 K there exist two disjoint balls B.x; "y/
and B.y; ry/. Since fB.y; ry/gy2K is an open cover of K and K is compact, there
is a finite subcover fB.yi ; ryi/gniD1 of K. Let
U D
n[iD1
B.yi ; ryi/ and O D
n\iD1
B.x; "yi/:
Then both U and O are open, K � U, x 2 O, and U \O D ¿. ut
I Exercise 72 (9.72). Let A and B be subsets of a metric space .X; �/. Define
dist.A;B/ D inff�.u; v/ W u 2 A; v 2 Bg:
If A is compact and B is closed, show that A\B D ¿ if and only if dist.A;B/ > 0.
Proof. First suppose that A \ B D ¿. If dist.A;B/ D 0, then for every n 2 N,
there exist un 2 A and vn 2 B such that �.un; vn/ < 1=n. Since A is compact,
there is a subsequence of fung converging to u 2 A. For notational convenience,
we assume that un ! u. Since
�.u; vn/ 6 �.u; un/C �.un; vn/! 0;
we know that vn ! u. But it is impossible since B is closed. Therefore,
dist.A;B/ > 0.
Next we assume that dist.A;B/ > 0. If there exists a point x 2 A \ B , then
�.x; x/ D 0 and so dist.A;B/ D 0. A contradiction. ut
I Exercise 73 (9.73). Let K be a compact subset of a metric space X and O an
open set containing K. Use the preceding problem to show that there is an open
set U for which K � U � SU � O.
Proof. Let F D X X O. Then F is closed and K \ F D ¿. It follows from
Exercise 72 that dist.K; F / > 0. Then for every x 2 K, there is an open ball
B.xI rx/ with xB.xI rx/ \ F D ¿. Thus, fB.xI rx/gx2K is an open cover of K. Since
K is compact, there is a finite subcover fB.xi ; rxi/gniD1 of fB.xI rx/gx2K . Let
U D
n[iD1
B.xi I rxi/:
Since U �SniD1xB.xi ; rxi
/ � O, it is now easy to see that K � U � SU � O. ut
SECTION 7.6 SEPARABLE METRIC SPACES 35
7.6 Separable Metric Spaces
I Exercise 74 (9.74). Let X be a metric space that contains a finite dense subset
D. Show that X D D.
Proof. Suppose there were a point x 2 X XD. Let r D miny2Df�.x; y/g, where
� is the metric on X . Since D is finite, the number r is well-defined. Then
D \ B.xI r/ D ¿; that is, D is not dense in X . A contradiction. ut
I Exercise 75 (9.75). Show that for a subset D of a metric space X , D is dense
in the subspace xD.
Proof. By definition. ut
I Exercise 76 (9.76). Show that if two continuous mappings defined on a met-
ric space X take the same values on a dense subset, then they are equal.
Proof. Let D � X be dense: xD D X . Let f; g W X ! R be continuous on X and
f D g on D. Define
A D fx 2 X W f .x/ D g.x/g:
We first show that A is closed. If fxng is a sequence in A and xn ! x, then by
continuity we have both f .xn/ ! f .x/ and g.xn/ ! g.x/ in R. Since f .xn/ D
g.xn/ for each n and limits are unique in R, we must have f .x/ D g.x/. Thus
x 2 A and A is closed.
Since D � A and A is closed, we have X D xD � xA D A. Because A � X , we
obtain X D A; that is, f D g on X . ut
I Exercise 77 (9.77). Show that the product of two separable metric spaces is
again separable.
Proof. Suppose that .Xi ; �i / are separable metric spaces, i D 1; 2. Then for
each i there exists countable set Di � Xi with SDi D Xi . Clearly, D1 � D2 is
countable and dense in X1 �X2. ut
I Exercise 78 (9.78). Easy.
I Exercise 79 (9.79). Show that on any uncountable set X there is a metric on
X with respect to which X is not separable.
Proof. Consider the discrete metric—every point is an open set. ut


8METRIC SPACES: THREE FUNDAMENTAL THEOREMS
8.1 The Arzelà-Ascoli Theorem
I Exercise 80 (10.1). Let E be a compact subspace of a metric space Y . Show
that E is a closed, bounded subset of Y .
Proof. A metric space is compact iff it is complete and totally bounded. Then
it is bounded. To see it is also closed, take an arbitrary convergent sequence
fxng in E. Then fxng is Cauchy and so xn ! x 2 E; that is, E is closed. ut
I Exercise 81 (10.2). Show that an equicontinuous sequence of real-valued
functions on a compact metric space K is pointwise bounded iff it is uniformly
bounded.
Proof. It is evident that uniform boundedness implies pointwise bounded-
ness. Conversely, let ffng be pointwise bounded. If ffng is not uniformly
bounded, then for each n, there exists fn and xn such that jfn.xn/j > n. Since
K is compact, xn ! x 2 K (by passing to a subsequence if necessary). Now
consider ffn.x/g. For n large enough we have fn.x/!1. A contradiction. ut
I Exercise 82 (10.3). Show that an equicontinuous family of continuous func-
tions on a compact metric space .K; �/ is uniformly equicontinuous.
Proof. If not, there exists ", xn 2 K, un 2 K, and fn 2 F such that
�.un; xn/ < 1=n and jfn.un/ � fn.xn/j > " for all n 2 N:
Since K is compact, it is sequential compact. We may assume that xn ! x 2 K.
Then
�.un; x/ 6 �.un; xn/C .xn; x/! 0I
that is, un ! x. By equicontinuity at x, for n large enough, jfn.un/�fn.x/j < "=2
and jfn.xn/ � fn.x/j < "=2, so
jfn.un/ � fn.xn/j 6 jfn.un/ � fn.x/j C jfn.x/ � fn.xn/j < ":
37

38 CHAPTER 8 METRIC SPACES: THREE FUNDAMENTAL THEOREMS
A contradiction. ut
I Exercise 83 (10.10). For 1 6 p <1, show that a subspace � of `p is compact
iff it is closed, bounded, and equisummable.
Proof. First suppose that � is closed, bounded, and equisummable. Let fx.n/g
be a sequence in � . The sequence fx.n/1 g1nD1 is bounded; therefore, by the
Bolzano-Weierstrass Theorem, it has a convergent subsequence; that is, there
is a strictly increasing sequence of natural numbers fs.1; n/g and a number x1for which
xs.1;n/1 ! x1:
Then, as the proof of Arzelà-Ascoli Lemma, we know that there is a subse-
quence fx.nk/g of fx.n/g which converges pointwisely to x. We next show that
x 2 `p . For notational convenience, we assume that x.n/ ! x pointwisely. Since
� is equisummable, for each " > 0 there exists N such that for all n 2 N,
1XkDN
ˇ̌̌x.n/
k
ˇ̌̌p< "
ut
9TOPOLOGICAL SPACES: THREE FUNDAMENTALTHEOREMS
9.1 Urysohn’s Lemma and the Tietze Extension Theorem
Lemma 9.1. Let X be a topological space. For � a dense subset of the open,
bounded interval of real numbers .a; b/, let fO�g�2� be a normally ascending
collection of open subsets of X . Define the function f W X ! R by setting f D b
on X XS�2� O� and otherwise setting f .x/ D inff� 2 � W x 2 O�g. Then
f W X ! Œa; b� is continuous.
Proof. We have the following facts:
U1: If x … xO�, then f .x/ > �;
U2: If x 2 O�, then f .x/ 6 �;
U3: If x 2 O� X xO� where � < �, then � 6 f .x/ 6 �.
First, pick an arbitrary x 2 X such that a < f .x/ < b. Let " > 0. Choose �
and � in � such that
f .x/ � " < � < f .x/ < � < f .x/C ":
Observe that such � and � can be found since � is dense in .a; b/. Then x … O�
for every � 2 .�; f .x//, so that x … xO� for xO� � O� . On the other hand, x 2 O�.
Hence, O� X xO� is an open nhood of x, and if y 2 O� X xO�, then � 6 f .y/ 6 �
by (U3). In particular, jf .y/ � f .x/j < " for y 2 O� X xO�.
Next, suppose that f .x/ D b. Let " > 0. Choose � 2 � such that
f .x/ � " < � < f .x/:
Similar to the arguments in the previous paragraph, x … xO�. Then X X xO� is
an open nhood of x, and if y 2 X X xO� then f .y/ > � by (U1). In particular,
jf .y/ � f .x/j < " for y 2 X X xO�.
Finally, suppose that f .x/ D a. Let " > 0. Choose � 2 � such that
f .x/ < � < f .x/C ":
39
40 CHAPTER 9 TOPOLOGICAL SPACES: THREE FUNDAMENTAL THEOREMS
Then x 2 O�, and if y 2 O� the f .y/ 6 � by (U2). In particular, jf .y/�f .x/j < ".
This proves that f W X ! Œa; b� is continuous indeed. ut

10CONTINUOUS LINEAR OPERATORS BETWEEN BANACHSPACES
10.1 Normed Linear Spaces
I Exercise 84 (13.1). Show that a nonempty subset S of a linear space X is a
subspace iff S C S D S and � � S D S for each � 2 R, � ¤ 0.
Proof. The “only if” part is clear, so we focus on the “if” part. S C S D S
implies that S is closed under C, and � � � �S with � ¤ 0 implies that S is closed
under scalar multiplication. It now suffices to show that 0 2 S . Since S ¤ ¿,
we take a point x 2 S . Then �s D �1 � s 2 S , and so 0 D s C .�s/ 2 S . ut
I Exercise 85 (13.2). If Y and Z are subspaces of the linear space X , show
that Y CZ also is a subspace and Y CZ D span.Y [Z/.
Proof. It is clear that 0 2 Y C Z. Let u; v 2 Y C Z; then there exist y1; y2 2 Y
and z1; z2 2 Z such that u D y1 C z1 and v D y2 C z2. Hence, u C v D .y1 C
y2/C .z1Cz2/ 2 Y CZ. Similarly we can show that Y CZ is closed under scalar
multiplication.
Observe that Y CZ is the smallest subspace containing Y and Z: any space
containing Y and Z must contain Y C Z. Since span.Y [ Z/ is a subspace
containing Y and Z, so Y C Z � span.Y [ Z/. Conversely, if x 2 span.Y [
Z/, then there exists �1; : : : ; �n 2 Rn and x1; : : : ; xn 2 Y [ Z, such that x DPniD1 �ixi 2 Y CZ; hence, span.Y [Z/ � Y CZ. ut
I Exercise 86 (13.3). Let S be a subset of normed linear space X .
a. Show that the intersection of a collection of linear subspaces of X also is a
linear subspace of X .
b. Show that span.S/ is the intersection of all the linear subspaces of X that
contain S and therefore is a linear subspace of X .
c. Show that span.S/ is the intersection of all the closed linear subspaces of X
that contain S and therefore is a closed linear subspace of X .
Proof. (a) Trivial.
41
42 CHAPTER 10 CONTINUOUS LINEAR OPERATORS BETWEEN BANACH SPACES
(b) span.S/ is the smallest linear subspace containing S .
(c) It suffices to show that span.S/ is a linear subspace of X . Let x; y 2 span.S/.
Then there exists fxng; fyng 2 span.S/ with xn ! x and yn ! y. Since span.S/
is a linear subspace, we have fxnC yng 2 span.S/. Hence, xnC yn ! xC y; that
is, x C y 2 span.S/. Similarly, we can show that span.S/ is closed under scalar
multiplication. ut
I Exercise 87 (13.4). For a normed linear space X , show that the function
k � k W X ! R is continuous.
Proof. It follows from the triangle inequality that for all x; y 2 X ,ˇ̌kxk � kyk
ˇ̌6 kx � yk: ut
I Exercise 88 (13.6). Let X be a normed linear space.
a. Let fxng and fyng be sequences in X such that xn ! x and yn ! y. Show that
for any real numbers ˛ and ˇ, ˛xn C ˇyn ! ˛x C ˇy.
b. Use (a) to show that if Y is a subspace of X , then its closure xY also is a linear
subspace of X .
c. Use (a) to show that the vector sum is continuous from X �X to X and scalar
multiplication is continuous from R �X to X .
Proof. Easy. ut
10.2 Linear Operators

References
[1] Chung, Kai Lai (2001) A Course in Probability Theory, San Diego, Cali-
fornia: Academic Press, 3rd edition. [19]
[2] Oxtoby, John C. (1980) Measure and Category, 2 of Graduate Texts in
Mathematics, New York: Springer-Verlag. [12]
[3] Royden, Halsey and Patrick Fitzpatrick (2010) Real Analysis, New
Jersey: Prentice Hall, 4th edition. [i]
43

Functional Analysis: An Introduction
A solution Manual for Eidelman et al. (2004)
Jianfei Shen
School of Economics, The University of New South Wales
Sydney, Australia October 15, 2011
Jianfei Shen
School of Economics
The University of New South Wales
Sydney 2052
Australia



Contents
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
1 Linear Spaces; Normed Spaces; First Examples . . . . . . . . . . . . . . . . . . . . . 1
2 A Model for Knowledge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
v

Preface
Sydney, Jianfei Shen
October 15, 2011
vii


Acknowledgements
ix


1LINEAR SPACES; NORMED SPACES; FIRST EXAMPLES
I Exercise 1 (1.1). Consider the linear space yC of double sequences x D
fxng1nD�1 such that the limits b1 D limn!1 xn and b2 D limn!�1 xn exist.
Consider moreover the subspace yC0 of the sequences y D fyng1nD�1 such that
limn!˙1 yn D 0. Find the dimension and a basis of the space yC= yC0.
Solution. If x 2 yC , then
b2 � � � x�2 x�1 x0 x1 x2 � � � ! b1:
Construct a double sequence y as follows:
� � � y�2 y�1 y0 y1 y2 � � �
� � � x�2 � b2 x�1 � b2 x0 � b1 x1 � b1 x2 � b1 � � �
Then y 2 yC0, and x can be written as
� � � b2 C y�2 b2 C y�1 b1 C y0 b1 C y1 b1 C y2 � � �
Set e1 D f� � � ; 0; 0; 1; 1; 1; � � � g and e2 D f� � � ; 1; 1; 0; 0; 0; � � � g. Observe that e1; e2 2
yC and
x D b1e1C b2e2
C y: (1.1)
We next show that .e1; e2/ is linearly independent relative to yC0. If
a1e1C a2e2
D .� � � ; a2; a2; a1; a1; a1; � � � / 2 yC0;
then obviously that a1 D a2 D 0. It follows from Lemma 1.1.4 that .Œe1�; Œe2�/ is
a basis of yC= yC0, and so dim yC= yC0 D 2. ut
I Exercise 2 (1.2). Consider the linear space C .3/ of all sequences x D fxng1nD1
such that fx3kCqg1kD0
converges for q D 0; 1; 2. Find the dimension and a basis
of the space C .3/=C0.
Solution. First observe that if a sequence converges then all of its subse-
quences converge; thus C0 is a subspace of C .3/. If x 2 C .3/, then
1

2 CHAPTER 1 LINEAR SPACES; NORMED SPACES; FIRST EXAMPLES
x0 x3 x6 x9 � � � ! x0
x1 x4 x7 x10 � � � ! x1
x2 x5 x8 x11 � � � ! x2
Construct a sequence y by letting y3kCq D x3kCq�xq . Then y 2 C0 and x3kCq D
y3kCq C xq . Let eq , q D 0; 1; 2, be a sequence satisfying
eqn D
˚1 if n D 3k C q
0 otherwise.
Thus,
x D x0e0C x1e1
C x2e2C y:
We next show that .e0; e1; e2/ is linearly independent relative to C0. If
a0e0C a1e1
C a2e2D .a0; a1; a2; a0; a1; a2; : : :/ 2 C0;
then the subsequences .a0; a0; : : :/, .a1; a1; : : :/ and .a2; a2; : : :/ all converge to 0;
but then a0 D a1 D a2 D 0. Hence, .Œe0�; Œe1�; Œe2�/ is a basis of C .3/=C0, and so
dimC .3/=C0 D 3. ut
I Exercise 3 (1.3). Prove that if dimE=Ei D 1, i D 1; : : : ; n, then dimE=T
i Ei 6n.
Proof. Obviously the claim holds for n D 1. Let us assume that
dim
0@E= n�1\iD1
Ei
1A 6 n � 1:
IfTn�1
iD1 Ei � En, thenTn
iD1Ei DTn�1
iD1 Ei and hence dim.E=Tn
iD1Ei / 6 n� 1 <
n.
So suppose thatTn�1
iD1 Ei 6� En. Take an arbitrary x0 2 .Tn�1
iD1 Ei / X En. Let
.Œx1�; : : : ; Œx`�/ be a basis of E=Tn�1
iD1 Ei , where ` 6 n � 1. Then every y 2 E can
be represented as
y DX̀iD1
ai xi C z0;
with z0 2Tn�1
iD1 Ei .
We next show that Œx0� is a basis of E=En. It suffices to show that EnCx0 ¤
En since dimE=En D 1. It follows since x0 … En. Hence we can write z0 as
z0 D a0x0 C z
for some z 2 En. We also have z D z0 � a0x0 2Tn�1
iD1 Ei . Hence, z 2Tn
iD1Ei . So
y DX̀iD1
ai xi C a0x0 C z (1.2)

CHAPTER 1 LINEAR SPACES; NORMED SPACES; FIRST EXAMPLES 3
with z 2Tn
iD1Ei .
We final show that .Œx1�; : : : ; Œx`�; Œx0�/ spans E=Tn
iD1Ei . Consider an arbi-
trary .Tn
iD1Ei / C y . It follows from (1.2) that y � .P`
iD1 ai xi C a0x0/ D z 2TniD1Ei . So we get 264y �
0@X̀iD1
ai xi C a0x0
1A375 D Œz� D Œ0�;
where all the cosets are relative toTn
iD1Ei . The above display can be expressed
as
Œy� D
24X̀iD1
ai xi C a0x0
35 D X̀iD1
ai Œxi �C a0Œx0�:
Therefore, dim.E=Tn
iD1/ 6 n. ut
Exercise 1.4—1.6 are simple. Omitted.
I Exercise 4 (1.7). Prove that if the unit sphere of a normed linear space
contains a line segment, then there exist vectors x and y such that kx C yk D
kxk C kyk and x, y are linear independent.
Proof. If I Œx;y� � � , then k�x C .1 � �/yk D 1 for all � 2 Œ0; 1�. In particular,
kxk D kyk D 1. Let � D 1=2. Then 1 D kx=2C y=2k implies that kx C yk D 2.
Finally, suppose that y D ax for some scalar a 2 F . Then kaxk D 1 implies
that a D 1; that is, x D y . ut
I Exercise 5 (1.8). Prove that if a normed linear space X contains linearly
independent vectors x and y such that kxk D kyk D 1, kx C yk D kxk C kyk,
then there exists a line segment contained in the unit sphere of X .
Proof. For every z D �xC.1��/y 2 I Œx;y�, we get kzk 6 �kxkC.1��/kyk D 1,
and for xx D .x C y/=2, we have kxxk D 1. Suppose there exists z 2 I Œx;y� such
that kzk < 1. Then either xx 2 I Œx; z� or xx 2 Œz;y�. Assume that the former case
holds. Then there exists ˛ 2 Œ0; 1� such that xx D ˛x C .1 � ˛/z. But then
kxxk 6 ˛kxk C .1 � ˛/kzk < 1:
A contradiction. Hence, I Œx;y� � � . ut
I Exercise 6 (1.9). Given the two spheres fx W kx � y0k D ky0kg and fx W
kxC y0k D ky0kg in a normed linear space, how many points can these spheres
have in common?
Solution. Denote the tow spheres as �� and �C. Let � D �� \ �C. Clearly
0 2 � ; that is, � ¤ ¿.
We next show that if x;y 2 � , then I Œx;y� 2 � . For every z D �x C .1 � �/y ,
we have

4 CHAPTER 1 LINEAR SPACES; NORMED SPACES; FIRST EXAMPLES
0
y0 ��
�C
Figure 1.1.
kz˙ y0k D k�.x ˙ y0/C .1 � �/.y ˙ y0/k
6 �kx ˙ y0k C .1 � �/ky ˙ y0k
D ky0k:
Thus, kz � y0k D k2y0 � .zC y0/k > 2ky0k � kzC y0k > ky0k, and similarly for
kzC y0k. ut
I Exercise 7 (1.10). Find the intersection of the unit ball in C Œ0; 1� with the
following subspaces:
a. span.t/,
b. span.1; t/,
c. span.1 � t; t /.
Solution. (a) Observe that if f .t/ 2 span.t/ D fat W a 2 F g, then kf .t/k D
katk D jaj supt2Œ0;1� jt j D jaj. Thus,
span.t/ \D.C Œ0; 1�/ D fat W jaj 6 1g:
(b) If f .t/ 2 span.1; t/ D faC bt W a; b 2 F g, then
kf .t/k D maxfjaC bj; jajg:
Hence,
span.1; t/ \D.C Œ0; 1�/ D faC bt W maxfjaC bj; jajg 6 1g:
(c) If f .t/ 2 span.1�t; t /, then f .t/ D a.1�t /Cbt , which is a convex combination
of a and b, and so kf .t/k D maxfjaj; jbjg. Hence,
span.1 � t; t / \D.C Œ0; 1�/ D fa.1 � t /C bt W maxfjaj; jbjg 6 1g: ut
I Exercise 8 (1.11). Compute the norm of a vector in the quotient space yC= yC0
(see Exercise 1).

CHAPTER 1 LINEAR SPACES; NORMED SPACES; FIRST EXAMPLES 5
Proof. It follows from (1.1) that x D b1e1 C b2e2 C y with y 2 yC0. Then
kŒx�k D infz2 yC0
kx � zk
D infc2 yC0
kb1e1C b2e2
C ck
6 kb1e1C b2e2
k
D k : : : ; b2; b2; b1; b1; : : : k
D maxfjb1j; jb2jg:
ut
I Exercise 9 (1.20). Let x.n/ 2 C , x.n/ ! x D fxkg1kD1
, as n ! 1, in the
supremum norm. Prove that x 2 C .
Proof. ut


2A MODEL FOR KNOWLEDGE
2.1
7


References
[1] Eidelman, Yuli, Vitali Milman, and Antonis Tsolomitis (2004) Func-
tional Analysis: An Introduction, 66 of Graduate Studies in Mathematics,
Providence, Rhode Island: American Mathematical Society. [i]
9

An Introduction to Manifolds
A Solution Manual for Tu (2011)
Jianfei Shen
School of Economics, The University of New South Wales
Sydney, Australia 2010


I hear, I forget;I see, I remember;I do, I understand.
Old Proverb

Contents
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
1 Euclidean Spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Smooth Functions on a Euclidean Space . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Tangent Vectors in Rn as Derivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 The Exterior Algebra of Multicovectors . . . . . . . . . . . . . . . . . . . . . . . . . . 7
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
v


Preface
Sydney, Jianfei ShenDate
vii

Chapter 1
Euclidean Spaces
1.1 Smooth Functions on a Euclidean Space
Exercise 1 (1.1). Let g .x/ D 34x4=3. Show that the function h .x/ D
R x0g .t/dt is
C 2 but not C 3 at x D 0.
Proof. Notice that h0 .x/ D g .x/. ut
Exercise 2 (1.2). Define f .x/ on R by
f .x/ D
˚e�1=x for x > 0;
0 for x 6 0:
a) Show by induction that for x > 0 and k > 0, the kth derivative f .k/ .x/ is of theform p2k
�1=x
�e�1=x for some polynomial p2k
�y�
of degree 2k in y.
b) Prove that f is C1 on R and f .k/ .0/ D 0 for all k > 0.
Proof. See Figure 1.1 for f .x/.
0
x
y
Figure 1.1.
(a) For k D 1, we see f 0 .x/ D�1=x2
�e�1=x . Let p2
�y�D y2, and we have
f 0 .x/ D p2�1=x
�e�1=x :
1

2 CHAPTER 1 EUCLIDEAN SPACES
Now suppose that f .k/ .x/ D p2k�1=x
�e�1=x . Then
f .kC1/ .x/ Dhp2k
�1=x
�e�1=x
i0D
hp2k
�1=x
�i0e�1=x C p2k
�1=x
� �e�1=x
�0D p2k�1
�1=x
���1=x
�2� e�1=x C p2k
�1=x
���1=x
�2� e�1=x
D
hq2kC1
�1=x
�C q2kC2
�1=x
�ie�1=x
D p2kC2�1=x
�e�1=x ;
where pn and qn are polynomials of degree n.
(b) It follows from (a) that f .x/ 2 C1 when x > 0. Since f .x/ D 0 for x < 0, it iseasy to see that f .x/ 2 C1 when x < 0. We thus only need to show that f .k/.0/exists and is continuous for all k. It is evident that f 0.0/ D 0. Now suppose thatf .k/.0/ D 0. By definition,
f .kC1/.0/ D limx!0
f .k/.x/ � f .k/.0/
xD limx!0
f .k/.x/
x:
We have
limx!0�
f .k/.x/
xD 0;
and
limx!0C
f .k/.x/
xD limx!0C
p2k�1=x
�e�1=x
x
D limx!0C
p2kC1�1=x
�e1=x
D limy!1
p2kC1.y/
ey
D 0:
This also proves that f .k/ is continuous at x D 0. ut
Exercise 3 (1.3). Let U � Rn and V � Rn be open sets. A C1 map F W U ! V iscalled a diffeomorphism if it is bijective and has a C1 inverse F �1 W V ! U .
a) Show that the function f W���=2; �=2
�! R, f .x/ D tan x, is a diffeomor-
phism.
b) Let a, b be real numbers with a < b. Find a linear function h W .a; b/! .�1; 1/,thus proving that any two finite open intervals are diffeomorphic.
c) The exponential function exp W R ! .0;1/ is a diffeomorphism. Use it to showthat for any real number a and b, the interval R, .a;1/, and .�1; b/ arediffeomorphic.
Proof. (a) is clear. For (b), note that h W .a; b/! .�1; 1/ is affine. Let

SECTION 1.1 SMOOTH FUNCTIONS ON A EUCLIDEAN SPACE 3
h.x/ D2.x � a/
b � a� 1:
Finally, let k W R! .a;1/ and ` W R! .�1; b/ be defined by
k.x/ D ex � a; `.x/ D �ex C b:
0
x
y
0
x
y
−1
1
a b
0
x
y
0
x
y
Figure 1.2. Diffeomorphims
ut
Exercise 4 (1.4). Show that the map
f W
���
2;�
2
�n! Rn; f .x1; : : : ; xn/ D .tan x1; : : : ; tan xn/ ;
is a diffeomorphism.
Proof. This holds since tan W .��=2; �=2/! R is a diffeomorphism. ut
Exercise 5 (1.5). Let 0 D .0; 0/ be the origin and B .0I 1/ the open unit disk inR2. To find a diffeomorphism between B .0I 1/ and R2, we identify R2 with thexy-plane in R3 and introduce the lower open hemisphere
S Dn.x; y; z/ W x2 C y2 C .z � 1/2 D 1; z < 1
oin R3 as an intermediate space (Figure 1.3). First note that the map
f W B .0I 1/! S;
.a; b/ 7! .a; b; 1 �p1 � a2 � b2/;
is a bijection.

4 CHAPTER 1 EUCLIDEAN SPACES
a) The stereographic projection g W S ! R2 from .0; 0; 1/ is the map that sendsa point .a; b; c/ 2 S to the intersection of the line through .0; 0; 1/ and .a; b; c/with the xy-plane. Show that it is given by
.a; b; c/ 7! .u; v/ D
�a
1 � c;b
1 � c
�; c D 1 �
p1 � a2 � b2;
with inverse
.u; v/ 7!
up
1C u2 C v2;
vp1C u2 C v2
; 1 �1p
1C u2 C v2
!:
b) Composing the two maps f and g gives the map
h D g B f W B .0I 1/! R2; h.a; b/ D
ap
1 � a2 � b2;
bp1 � a2 � b2
!:
Find a formula for h�1.u; v/ D .f �1 B g�1/.u; v/ and conclude that h is a dif-feomorphism of the open disk B .0I 1/ with R2.
c) Generalize part (b) to Rn.
Proof.
(a) The line through .0; 0; 1/ and .a; b; c/ can be expressed as
.0; 0; 1/C ��.a; b; c/ � .0; 0; 1/
�D .�a; �b; 1C �.c � 1//;
where � 2 R and c D 1�p1 � a2 � b2 since .a; b; c/ 2 S . When this line intersects
with the xy-plane, we have 1C �.c � 1/ D 0, i.e.,
� D1
1 � c:
But then
u D �a Da
1 � c; v D �b D
b
1 � c:
To find the inverse of g, note that the line through .0; 0; 1/ and .u; v; 0/ can bewritten as
.0; 0; 1/C ��.u; v; 0/ � .0; 0; 1/
�D .�u; �v; 1 � �/;
where � 2 RC. If this line intersects with S , we must have
.�u/2 C .�v/2 C .1 � � � 1/2 D 1I
hence,
� D1
1C u2 C v2;
and the result holds.
(b) Take any .u; v/ 2 R2. Then

SECTION 1.1 SMOOTH FUNCTIONS ON A EUCLIDEAN SPACE 5
0
S
.a; b; c/
.a; b; 0/ 0
S
.a; b; c/
.u; v; 0/
.0; 0; 1/
Figure 1.3. A diffeomorphism of an open disk with R2.
h�1.u; v/ D f �1�g�1.u; v/
�D f �1
up
1C u2 C v2;
vp1C u2 C v2
; 1 �1p
1C u2 C v2
!
D
up
1C u2 C v2;
vp1C u2 C v2
!:
0
S
.a; b; c/
.u; v; 0/
g
.a; b; 0/
f
h
Figure 1.4. h D g B fut
Exercise 6 (1.6). Prove that if f W R2 ! R is C1, then there exist C1 functionsg11, g12, g22 on R2 such that
f .x; y/ D f .0; 0/C @[email protected]; 0/x C @f
@y.0; 0/y
C x2g11.x; y/C xyg12.x; y/C y2g22.x; y/:
Proof. Use Taylor’s theorem with remainder iteratively. ut

6 CHAPTER 1 EUCLIDEAN SPACES
1.2 Tangent Vectors in Rn as Derivations
Exercise 7 (2.1). Let X be the vector field x @@xC y @
@yand f .x; y; z/ the function
x2 C y2 C z2 on R3. Compute Xf .
Proof. We have
Xf D x@f
@xC y
@f
@yD 2x2 C 2y2:
Figure 1.5. The vector field X .
ut
Exercise 8 (2.2). Define carefully addition, multiplication, and scalar multiplica-tion in C1p . Prove that addition in C1p is commutative.
Proof. The operators are given by
.f; U /C .g; V / D .f C g;U \ V /;
c�.f; U /
�D .cf; U /;
.f; U /.g; V / D .fg; U \ V /:
Let us denote the germ at p of the function element .f; U / simply by Œf �p ;there is no need to include the domain U in the notation, because the samegerm is represented by the restriction of f to any neighborhood of p. ut
Exercise 9 (2.3). Let D and D0 be derivations at p in Rn, and c 2 R. Prove that
a) the sum D CD0 is a derivation at p.
b) the scalar multiple cD is a derivation at p.

SECTION 1.3 THE EXTERIOR ALGEBRA OF MULTICOVECTORS 7
Proof. Let D;D0 2 Dp.Rn/, .f; U / 2 Œf �p , and .g; V / 2 Œg�p . Then DCD0 and cDare both linear,�
D CD0�.fg/ D D.fg/CD0.fg/
D f .p/Dg C g.p/Df C f .p/D0g C g.p/D0.f /
D f .p/�Dg CD0g
�C g.p/
�Df CD0f
�D f .p/
�D CD0
�g C g.p/
�D CD0
�f;
and
.cD/.fg/ D c�D.fg/
�D c
�f .p/Dg C g.p/Df
�D f .p/.cD/g C g.p/.cD/f: ut
1.3 The Exterior Algebra of Multicovectors
Exercise 10 (Exercise 3.6). Find the inversions in the permutation � D .1; 2; 3; 4; 5/of Example 3.5.
Solution. We first have�2 1 3 4 5
�!
�2 3 1 4 5
�!
�2 3 4 1 5
�!
�2 3 4 5 1
�I
hence,
� D
1 2 3 4 5
2 3 4 5 1
!:
Then, the inversions are.2; 1/; .3; 1/; .4; 1/; .5; 1/:
ut
Exercise 11 (Exercise 3.13). Show that the k-linear function Sf is symmetric.
Proof. For � 2 Sk ,
�.Sf / DX�2Sk
�.�f / DX�2Sk
.��/f D .Sf /: ut
Exercise 12 (Exercise 3.15). If f is a 3-linear function on a vector space V andv1; v2; v3 2 V , what is .Af /.v1; v2; v3/?
Solution. There are six permutations in S3:
� .1; 2; 3/ .1; 3; 2/ .2; 1; 3/ .2; 3; 1/ .3; 1; 2/ .3; 2; 1/
sgn .�/ C1 �1 �1 C1 C1 �1

8 CHAPTER 1 EUCLIDEAN SPACES
Hence,
.Af /.v1; v2; v3/ DX�2S3
.sgn .�//�f
D f .v1; v2; v3/ � f .v1; v3; v2/ � f .v2; v1; v3/
C f .v2; v3; v1/C f .v3; v1; v2/ � f .v3; v2; v1/: ut
Exercise 13 (Exercise 3.17). If f , g, and h are multilinear functions on V , then
.f ˝ g/˝ h D f ˝ .g ˝ h/:
Proof. Let f be a k-linear function, g a `-linear function, and h a m-linear func-tion on V . Let u D .u1; : : : ; uk/, v D .v1; : : : ; v`/, and w D .w1; : : : ; wm/. Then
.f ˝ g/˝ h.u; v;w/ D .f ˝ g/.u; v/ � h.w/
D f .u/g.v/h.w/
D f .u/�g.v/h.w/
�D f ˝ .g ˝ h/.u; v;w/: ut
Exercise 14 (Exercise 3.20). For f; g 2 A2.V /, write out the definition of f ^ gusing .2; 2/-shuffles.
Solution. There are�42
�D 6 terms of .2; 2/-shuffles:
� .1; 2; 3; 4/ .1; 3; 2; 4/ .1; 4; 2; 3/ .2; 3; 1; 4/ .2; 4; 1; 3/ .3; 4; 1; 2/
sgn .�/ C1 �1 C1 C1 �1 C1
Hence,
.f ^ g/.v1; v2; v3; v4/ D f .v1; v2/g.v3; v4/ � f .v1; v3/g.v2; v4/
C f .v1; v4/g.v2; v3/C f .v2; v3/g.v1; v4/
� f .v2; v4/g.v1; v3/C f .v3; v4/g.v1; v2/: ut
Exercise 15 (3.22). Show that sgn .�/ D .�1/k`.
Proof. � is defined by
� D
1 � � � ` `C 1 � � � `C k
k C 1 � � � k C ` 1 � � � `
!:
Then, to move every j , 1 6 j 6 `, to its natural position, we need ` transposi-tions. So there are k` transformations, and so sgn .�/ D .�1/k`. ut
Exercise 16 (3.1). Let e1; : : : ; en be a basis for a vector space V and let ˛1; : : : ; ˛n
be its dual basis in V _. Suppose Œgij � 2 Rn�n is an n � n matrix. Define a bilinearfunction f W V � V ! R by

SECTION 1.3 THE EXTERIOR ALGEBRA OF MULTICOVECTORS 9
f .v;w/ DX
16i;j6n
gij viwj
for v DPviei and w D
Pwj ej in V . Describe f in terms of the tensor products
of ˛i and ˛j , 1 6 i; j 6 n.
Solution. f .v;w/ DPi;j gij˛
i .v/˛j .w/ DPi;j gij � .˛
i ˝ ˛j /.v; w/. ut
Exercise 17 (3.2).
a) Let V be a vector space of dimension n and f W V ! R a nonzero linear func-tional. Show that dim
�kerf
�D n � 1.
b) Show that a nonzero linear functional on a vector space V is determined up toa multiplicative constant by its kernel, a hyperplane in V .
Proof.
(a) We have dim�kerf
�Cdim
�Rf�D dim .V /, where Rf is the range of f . Now
f ¤ 0 so dim�Rf�D 1. Hence, dim
�kerf
�D n � 1.
(b) Let kerf D kerg. Let .e1; : : : ; en�1/ be a basis of kerf , and extend it to.e1; : : : ; en�1; en/, a basis of V . Further, .˛1; : : : ; ˛n/ is a basis of V _. Then
f D
nXiD1
f .ei /˛iD f .en/˛
n;
g D
nXiD1
g.ei /˛iD g.en/˛
nI
that is, f D cg for some c 2 R. ut
Exercise 18 (3.3). Let V be a vector space of dimension n with basis e1; : : : ; en.Let ˛1; : : : ; ˛n be the dual basis for V _. Show that a basis for the space Lk.V / ofk-linear functions on V is f˛i1 ˝ � � � ˝ ˛ik g for all multi-indices .i1; : : : ; ik/ (not justthe strictly ascending multi-indices as for Ak.V /). In particular, this shows thatdim
�Lk.V /
�D nk .
Proof. We follow Lee (2003, Proposition 11.2, p. 262-263). Let
B Dn˛i1 ˝ � � � ˝ ˛ik W 1 6 i1; : : : ; ik 6 n
o:
We need to show that B is independent and spans Lk.V /. Suppose T 2 Lk.V /is arbitrary. For any k-tuple .i1; : : : ; ik/ of integers such that 1 6 ij 6 n, define anumber Ti1���ik by
Ti1���ik D T.ei1 ; : : : ; eik /:
We will show thatT D
XTi1���ik˛
i1 ˝ � � � ˝ ˛ik ;
from which it follows that B spans Lk.V /. We compute

10 CHAPTER 1 EUCLIDEAN SPACES
Ti1���ik˛i1 ˝ � � � ˝ ˛ik .ej1
; : : : ; ejk/ D Ti1���ik˛
i1.ej1/ � � �˛ik .ejk
/
D Ti1���ikıi1j1� � � ı
ikjk
D Tj1���jk
D T.ej1; : : : ; ejk
/:
By multilinearity, a tensor is determined by its action on sequences of basisvectors, so this proves the claim.
To show that B is independent, suppose some linear combination equalszero: X
ci1���ik˛i1 ˝ � � �˛ik D 0;
where ci1���ik 2 R. Apply this to any sequence .ej1; : : : ; ejk
/ of basis vectors. By thesame computation as above, this implies that cj1���jk
D 0. ut

References
[1] Lee, J. M. (2003), Introduction to Smooth Manifolds, Vol. 218 of GraduateTexts in Mathematics, New York: Springer-Verlag. [9]
[2] Tu, L. W. (2011), An Introduction to Manifolds, Universitext, New York:Springer Science+Business Media, 2nd edition. [i]
11

1SETS AND EVENTS
I Exercise 1 (1.1). Suppose ˝ D f0; 1g and C D ff0gg. Enumerate ˙.C/, the
class of all � -fields containing C .
Solution. ˙.C/ D fff0g; f1g;¿; ˝gg. ut
I Exercise 2 (1.1). Suppose ˝ D f0; 1; 2g and C D ff0gg. Enumerate ˙.C/, the
class of all � -fields containing C and give �.C/.
Solution. ˙.C/ consists of ff0g; f1; 2g;¿; ˝g and 2˝ . Hence
�.C/ D ff0g; f1; 2g;¿; ˝g: ut
I Exercise 3 (1.4). Suppose that An D fm=n W m 2 Ng, n 2 N. What is
lim infn!1An and lim supn!1An?
Proof. By definition,
lim infn!1
An D ŒAn ev:�
D f! W .9N/ .8 n > N/ .! 2 An/g
ut
I Exercise 4 (1.5). Let fn, f be real functions on ˝. Show
˚! W fn .!/ 6! f .!/
D
1[kD1
1\ND1
1[nDN
˚! W jfn .!/ � f .!/j > 1=k
:
Proof. fn .!/ ! f .!/ if and only if for every k 2 N, there exists N 2 N such
that for each n > N we have jfn .!/ � f .!/j < 1=k; that is,
f! W fn .!/! f .!/g D
1\kD1
1[ND1
1\nDN
˚! W jfn .!/ � f .!/j < 1=k
:
Taking the complementation of the above display, we get the result. ut
1

2 CHAPTER 1 SETS AND EVENTS
I Exercise 5 (1.8). Let B;C � ˝, and define
An D
˚B if n is odd;
C if n is even:
What is lim infn!1An and lim supn!1An.
Proof. By definition,
lim infn!1
An D ŒAn ev:� ;
lim supn!1
An D ŒAn i:o:� :
Therefore,
lim infn!1
An D B \ C; and lim supn!1
An D A [ B:
ut
I Exercise 6 (1.9). Check that A M B D Ac M Bc .
Proof. We have
Ac M Bc D�Ac X Bc
�[�Bc X Ac
�D .B X A/ [ .A X B/ D A M B:
ut
I Exercise 7 (1.17). Prove lim infn!1An D˚! 2 ˝ W limn!1 1An
.!/ D 1.
Proof. By definition, lim infn!1An D ŒAn ev:�. Therefore,
! 2 lim infn!1
An () .9N 2 N/ .8 n > N/ .! 2 An/
() limn!1
1An.!/ D 1:
ut
I Exercise 8 (1.18). Suppose A is a class of sets containing ˝ and satisfying
A;B 2 A implies A X B 2 A. Show A is a field.
Proof. It is clear that ˝ 2 A and A is closed under complementation, so we
need only to show that A is closed under finite intersection. Let A;B 2 A. Then
Bc 2 A, and so
A \ B D A \�Bc�cD A X Bc 2 A:
ut
I Exercise 9 (1.19). For sets A;B , show 1A[B D 1A _ 1B and 1A\B D 1A ^ 1B .
Proof. We have

CHAPTER 1 SETS AND EVENTS 3
1A[B .!/ D 1 () ! 2 A [ B
() 1A .!/ D 1 or 1B .!/ D 1
() .1A _ 1B/ .!/ D 1;
and
1A\B .!/ D 1 () ! 2 A \ B
() 1A .!/ D 1 and 1B .!/ D 1
() .1A ^ 1B/ .!/ D 1:
ut
I Exercise 10 (1.21). Suppose A is a field and suppose also that A has the
property that is is closed under countable disjoint unions. Show A is a � -field.
Proof. Take a sequence fAng1nD1 � A. Let B1 D A1, B2 D A2 X A1, � � � , Bn D
An X�Sn�1
iD1 Ai
�, � � � . Then
1[nD1
Bn D
1[nD1
An;
Bn 2 A for each n, and the sequence fBng1nD1 is disjoint. Hence,
S1nD1An 2 A;
that is, A is a � -field. ut
I Exercise 11 (1.43). For subsets A;B;C;D show 1AMB D .1A C 1B/ mod 2,
and hence
a. .A M B/ M C D A M .B M C/,
b. .A M B/ M .B M C/ D A M C ,
c. .A M B/ M .C M D/ D .A M C/ M .B M D/,
d. A M B D C iff A D B M C ,
e. A M B D C M D iff A M C D B M D.
Proof. We have
.1A C 1B/ .!/ D
8̂̂̂<̂ˆ̂:2 iff ! 2 A \ B;
1 iff ! 2 .A X B/ [ .B X A/ ;
0 otherwisw.
Therefore, .1A C 1B/ .!/ mod 2 D 1 iff ! 2 A M B iff 1AMB .!/ D 1.
(a) For any set A, we have ! 2 A iff 1A .!/ D 1; hence,

4 CHAPTER 1 SETS AND EVENTS
! 2 .A M B/ M C () 1.AMB/MC .!/ D 1
() .1A4B C 1C / .!/ mod 2 D 1
()
�h�1A .!/C 1B .!/
�mod 2
iC 1C .!/
�mod 2 D 1
()
n�1A .!/C 1B .!/
�mod 2
oC˚1C .!/ mod 2
D 1
()�1A .!/C 1B .!/C 1C .!/
�mod 2 D 1:
Similarly, ! 2 A M .B M C/ iff�1A .!/C 1B .!/C 1C .!/
�mod 2 D 1.
(b) It follows from (a) that
.A M B/ M .B M C/ D A M�B M .B M C/
�D A M
�.B M B/ M C
�D A M .¿ M B/
D A M B:
(c) It is easy to see that A M B D B M A; hence,
.A M B/ M .C M D/ D A M�B M .C M D/
�D A M
�.B M C/ M D
�D A M
�.C M B/ M D
�D A M
�C M .B M D/
�D .A M C/ M .B M D/ :
(d) First assume that A M B D C ; then B M .A M B/ D B M C , i.e., A D B MC . Now assume that A D B M C ; then A M B D .B M C/ M B D C .
(e) By (d), A M B D C M D iff A D B M .C M D/.It is clear that the the later
equality holds iff A M C D B M D. ut
I Exercise 12 (1.44). Let A be a field of subsets of ˝ and define
xA D˚A � ˝ W 9An 2 A and An ! A
:
Show A � xA and xA is a field.
Proof. For any A 2 A, if we let An D A for all n, then An ! A and so A 2 xA.
To see xA is a field, note that ˝ 2 A implies that ˝ 2 xA. If A 2 xA, there exists
a sequence of A-sets An ! A. In particular, lim infnAn D lim supnAn D A, and
so
lim infn
Acn D[n
\k>n
Ack D[n
0@[k>n
Ak
1Ac D0@\
n
[k>n
Ak
1Ac D �lim supn
An
�cD Ac ;
and

CHAPTER 1 SETS AND EVENTS 5
lim supn
Acn D\n
[k>n
Ack D\n
0@\k>n
Ak
1Ac D0@[
n
\k>n
Ak
1Ac D �lim infn
An
�cD Ac :
Therefore, Acn ! Ac and so Ac 2 xA. Finally, it is also easy to see that xA is
closed under finite union. ut


2PROBABILITY SPACES
I Exercise 13 (2.3). Let .˝;B;P/ be a probability space. Show for events
Bi � Ai the following generalization of subadditivity: P ŒSi Ai � � P Œ
Si Bi � 6P
i
�P Œ Ai � � P Œ Bi �
�.
Proof. By subadditivity, P ŒSi Ai � 6
Pi P Œ Ai � and P Œ
Si Bi � 6
Pi P Œ Bi �. Then
the desired result is obtained immediately. ut
7


3RANDOM VARIABLES, ELEMENTS, AND MEASURABLEMAPS
9


4INDEPENDENCE
I Exercise 14 (4.1). Let B1; : : : ; Bn be independent events. Show P ŒSniD1 Bi � D
1 �QniD1
�1 � P Œ Bi �
�.
Proof. We first consider n D 2. In this case, P Œ B1 [ B2� D P Œ B1� C P Œ B2� �
P Œ B1 \ B2� D P Œ B1�C P Œ B2� � P Œ B1�P Œ B2� D 1 ��1 � P Œ B1�
� �1 � P Œ B2�
�.
Now assume that P ŒSniD1 Bi � D 1 �
QniD1
�1 � P Œ Bi �
�, and consider the nC 1
case. We have
P ŒnC1[iD1
Bi � D P Œ
0@ n[iD1
Bi
1A [ Bn1�D 1 �
0@1 � P Œn[iD1
Bi �
1A�1 � P Œ BnC1��
D 1 �
2641 �0@1 � nY
iD1
�1 � P Œ Bi �
�1A375�1 � P Œ BnC1�
�
D 1 �
nC1YiD1
�1 � P Œ Bi �
�:
ut
I Exercise 15 (4.3). If fAng1nD1 is an independent sequence of events, show
P Œ1\nD1
An� D
1YnD1
P Œ An�:
Proof. It is clear that fAng is a �-system for every n, and � .An/ D˚¿; ˝;An; Acn
.
Then f� .An/g1nD1 is independent. Then for each n,
P Œn\kD1
Ak � D
nYkD1
P Œ Ak �:
Taking limit, we get the result. ut
11

12 CHAPTER 4 INDEPENDENCE
I Exercise 16 (4.7). If A, B , C are independent events, show directly that
.A [ B/ ?? C and .A X B/ ?? C .
Proof. We verify these claims by definition.
P Œ .A [ B/ \ C � D P Œ .A \ C/ [�.B \ C/ X .A \ B \ C/
��
D P Œ A \ C �C P Œ B \ C � � P Œ A \ B \ C �
D P Œ A�P Œ C �C P Œ B�P Œ C � � P Œ A�P Œ B�P Œ C �
D�P Œ A�C P Œ B� � P Œ A�P Œ B�
�P Œ C �
D P Œ A [ B�P Œ C �:
P Œ .A X B/ \ C � D P Œ .A \ C/ X B�
D P Œ .A \ C/ X .A \ B \ C/�
D P Œ A \ C � � P Œ A \ B \ C �
D P Œ A�P Œ C � � P Œ A�P Œ B�P Œ C �
D P Œ A��1 � P Œ B�
�P Œ C �
D P Œ A�P Œ Bc �P Œ C �
D P Œ A X B�P Œ C �:
ut

5CONVERGENCE CONCEPTS
I Exercise 17 (6.12). Let fXng be a sequence of random variables.
a. If Xn0, then for any p > 0,jXnj
p
1CjXnjp 0; (5.1)
and
E
"jXnj
p
1CjXnjp
#! 0: (5.2)
b. If for some p > 0 (5.1) holds, then Xn0.
c. Suppose p > 0. Show Xn0 if and only if (5.2).
Proof. (a) Note that jxjp =�1Cjxjp
�is continuous; then by Resnick (1999,
Corollary 6.3.1, p.174) we have that if Xn0, then
jXnjp�
1CjXnjp� 0
1C 0D 0:
Now suppose that
limn
E
"jXnj
p
1CjXnjp
#¤ 0:
Then there exist " > 0 and a subsequence˚Xnk
of fXng such that for all k
E
" ˇ̌Xnk
ˇ̌p1C
ˇ̌Xnk
ˇ̌p#> ":
Since Xn0 if and only if each subsequence˚Xnk
contains a further subse-
quence Xnk.i/0, by passing to a subsequence, we can assume that Xnk
0. Since
0 6ˇ̌Xnk
ˇ̌p1C
ˇ̌Xnk
ˇ̌p < 1;Lebesgue Dominated Convergence Theorem implies that
13

14 CHAPTER 5 CONVERGENCE CONCEPTS
limk
Z ˇ̌Xnk
ˇ̌p1C
ˇ̌Xnk
ˇ̌p D Z limk
ˇ̌Xnk
ˇ̌p1C
ˇ̌Xnk
ˇ̌p D 0:But then
0 < " 6 limk
Z ˇ̌Xnk
ˇ̌p1C
ˇ̌Xnk
ˇ̌p D 0;a contradiction.
(b) Let p > 0 and jXnjp =
�1CjXnj
p�0; that is,
P ŒjXnj
p
1CjXnjp > "�! 0:
The above display equals to
P ŒjXnj >
�"
1 � "
�1=p�! 0;
i.e., Xn0.
(c) It follows from (a) that Xn0 implies (5.2), so we only need to show that
(5.2) implies that XnX . We have
P ŒjXnjp > "� D P Œ
jXnjp
1CjXnjp >
"
1C "�
61C "
"
ZjXnj
p
1CjXnjp
! 0:
Since p > 0, the above display can be expressed as
P ŒjXnj > "1=p�! 0I
that is, XnX . ut

References
[1] Resnick, Sidney I. (1999) A Probability Path, Boston: Birkhäuser. [13]
15

Probability and Measure
A Solution Manual for Billingsley (1995)
Jianfei Shen
School of Economics, The University of New South Wales
Sydney, Australia 2011


Contents
1 Probability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Borel’s Normal Number Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Dyadic Expansions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2 The Weak Law of Large Numbers . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.3 The Strong Law of Large Numbers . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.4 Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Probability Measures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Existence and Extension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Construction of the Extension . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Denumerable Probabilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Denumerable Probabilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
iii


1PROBABILITY
1.1 Borel’s Normal Number Theorem
1.1.1 Dyadic Expansions
Define T W .0; 1�! .0; 1� by
T .!/ D
˚2! if ! 2
�0; 1=2
�2! � 1 if ! 2
�1=2; 1
�(see Figure 1.1.)
0 0.5 1
1
!
T
Figure 1.1. T W .0; 1�! .0; 1�
Define d1 W .0; 1�! f0; 1g by
d1 .!/ D
˚0 if ! 2
�0; 1=2
�;
1 if ! 2�1=2; 1
�;
and let di .!/ D .d1 ı Ti�1/ .!/. For instance, d1, d2, and d3 are depicted in
Figure 1.2.
1
2 CHAPTER 1 PROBABILITY
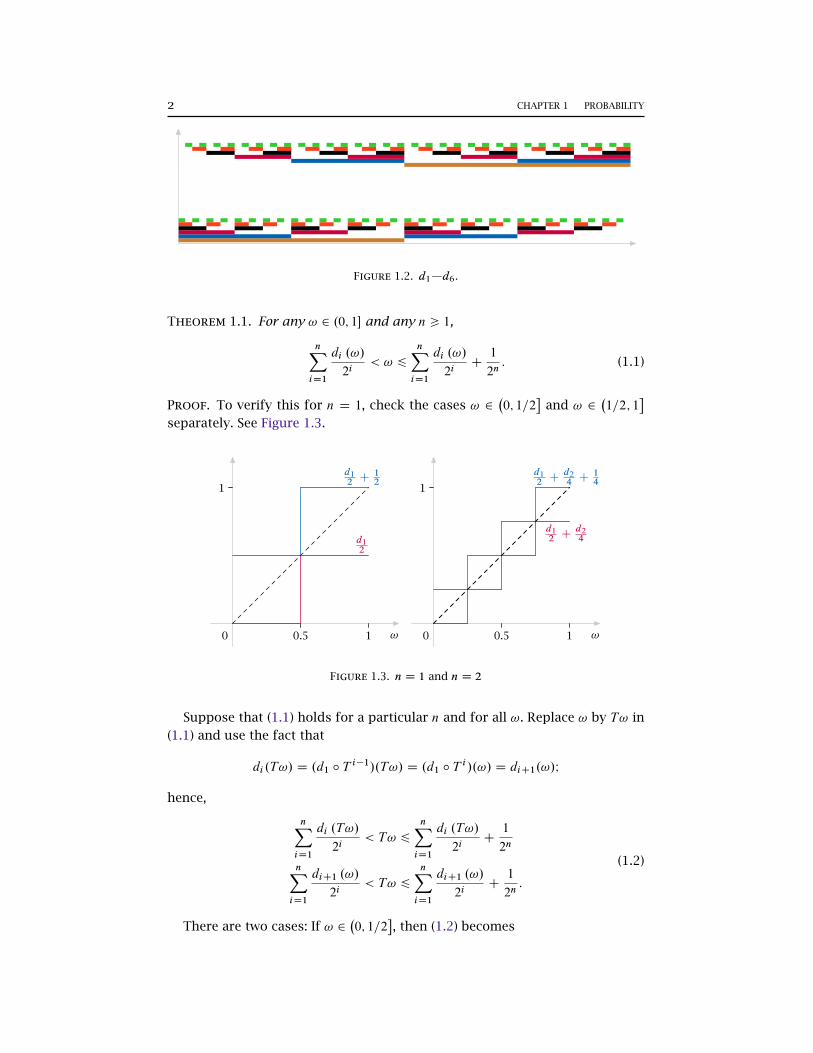
Figure 1.2. d1—d6.
Theorem 1.1. For any ! 2 .0; 1� and any n > 1,
nXiD1
di .!/
2i< ! 6
nXiD1
di .!/
2iC
1
2n: (1.1)
Proof. To verify this for n D 1, check the cases ! 2�0; 1=2
�and ! 2
�1=2; 1
�separately. See Figure 1.3.
0 0.5 1
1
!
d12
d12 C
12
0 0.5 1
1
!
d12 C
d24
d12 C
d24 C
14
Figure 1.3. n D 1 and n D 2
Suppose that (1.1) holds for a particular n and for all !. Replace ! by T! in
(1.1) and use the fact that
di .T!/ D .d1 ı Ti�1/.T!/ D .d1 ı T
i /.!/ D diC1.!/I
hence,
nXiD1
di .T!/
2i< T! 6
nXiD1
di .T!/
2iC
1
2n
nXiD1
diC1 .!/
2i< T! 6
nXiD1
diC1 .!/
2iC
1
2n:
(1.2)
There are two cases: If ! 2�0; 1=2
�, then (1.2) becomes
SECTION 1.1 BOREL’S NORMAL NUMBER THEOREM 3
nXiD1
diC1 .!/
2i< 2! 6
nXiD1
diC1 .!/
2iC
1
2n
nXiD1
diC1 .!/
2iC1< ! 6
nXiD1C1
diC1 .!/
2iC1C
1
2nC1
nC1XiD2
di .!/
2i< ! 6
nC1XiD2
di .!/
2iC
1
2nC1
0C
nC1XiD2
di .!/
2i< ! 6 0C
nC1XiD2
di .!/
2iC
1
2nC1I
that is,nC1XiD1
di .!/
2i< ! 6
nC1XiD1
di .!/
2iC
1
2nC1
since d1 .!/ D 0 when ! 2�0; 1=2
�.
If ! 2�1=2; 1
�, then (1.2) becomes
nXiD1
diC1 .!/
2i<2! � 1 6
nXiD1
diC1 .!/
2iC
1
2n
1
2C
nC1XiD2
di .!/
2i< ! 6
1
2C
nC1XiD2
di .!/
2iC
1
2nC1
nC1XiD1
di .!/
2i< ! 6
nC1XiD1
di .!/
2iC
1
2nC1;
since d1 .!/ D 1 when ! 2�1=2; 1
�. Thus (1.1) holds for all n and !, and it
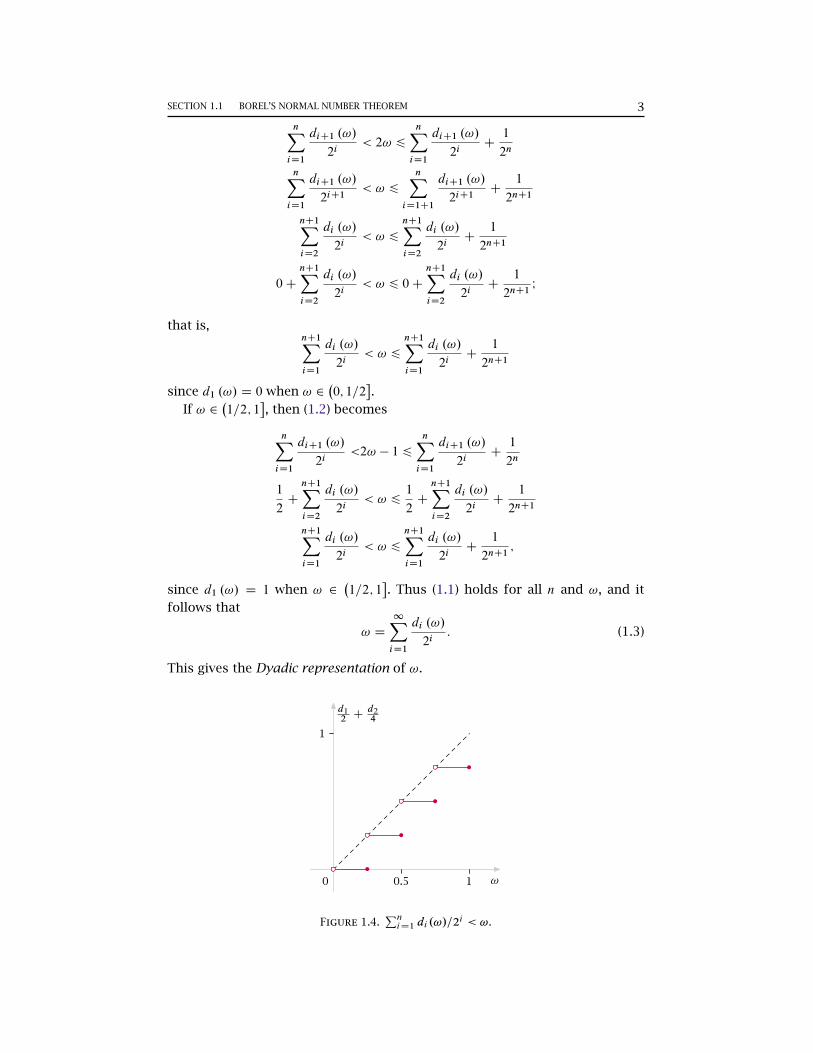
follows that
! D
1XiD1
di .!/
2i: (1.3)
This gives the Dyadic representation of !.
0 0.5 1
1
!
d12 C
d24
Figure 1.4.Pn
iD1 di .!/=2i < !.
4 CHAPTER 1 PROBABILITY
If di .!/ D 0 for all i > n, then ! DPniD1 di .!/ =2
i , which contradicts the
left-hand inequality in (1.1). Thus the expansion does not terminate in 0’s; see
Figure 1.4. ut
1.1.2 The Weak Law of Large Numbers
0 1
1
2
3 d1 C d2 C d3
0 1
−3
3s3
000 001 010 011 100 101 110 111
Figure 1.5. d1 C d2 C d3 and s3 D 2 .d1 C d2 C d3/� 3
0
−1
1
!
sn=n
n D 3 n D 4 n D 5
Figure 1.6. Weak LLN
1.1.3 The Strong Law of Large Numbers
1.1.4 Problems
I Exercise 1 (1.1).
a. Show that a discrete probability space cannot contain an infinite sequence
A1; A2; : : : of independent events each of probability 1=2.

SECTION 1.2 PROBABILITY MEASURES 5
0 0.25 0.5 0.75 1
0.5
1
!
d1Cd2Cd33
Figure 1.7. SLLN
b. Suppose that 0 6 pn 6 1, and put ˛n D minfpn; 1 � png. Show that, ifPn ˛n
diverges, then no discrete probability space can contain independent events
A1; A2; : : : such that An has probability pn.
Proof. (a) Suppose there is such a infinite independent sequence fAng. Then
each ! 2 ˝ lies in one and only one of the following sets:
A1 \ A2; A1 X A2; A2 X A1; Ac1 \ Ac2:
It is easy to see that the probability of each of these sets is 1=4; hence, P Œ !� 61=4 for all ! 2 ˝. Continue with this process, we see that P Œ !� 6 1=2n for all n;
hence, P Œ !� D 0 for all ! 2 ˝. A contradiction.
(b) ut
I Exercise 2 (1.2). Show that N and N c are dense.
Proof. ut
1.2 Probability Measures
Problems
I Exercise 3 (2.1). Define x _ y D max fx; yg, and for a collection fx˛g defineW˛ x˛ D sup˛ x˛ ;
Proof. ut
I Exercise 4 (2.3).
a. Suppose that ˝ 2 F and that A;B 2 F implies A X B D A \ Bc 2 F . Show
that F is a field.
b. Suppose that˝ 2 F and that F is closed under the formation of complements
and finite disjoint unions. Show that F need not be a field.
Proof.

6 CHAPTER 1 PROBABILITY
a. If A 2 F , then Ac D ˝ X A 2 F . Let A;B 2 F , then Bc 2 F , and so
A \ B D A X Bc 2 F .
b. Let ˝ D f1; 2; 3; 4g and F D˚f1; 2g ; f1; 3g ; f1; 4g ; f2; 3g ; f2; 4g ; f3; 4g ;¿; ˝
. F
is not a field, say, f1; 2g \ f1; 3g D f1g … F .
ut
I Exercise 5 (2.4). Let F1;F2; : : : be classes of sets in a common space ˝.
a. Suppose that Fn are fields satisfying Fn � FnC1. Show thatS1nD1 Fn is a field.
b. Suppose that Fn are � -fields satisfying Fn � FnC1. Show by example thatS1nD1 Fn need not be a � -field.
Proof.
a. Clearly, ˝ 2S1nD1 Fn and A 2
S1nD1 Fn implies that Ac 2
S1nD1 Fn. Let
A;B 2S1nD1 Fn. Then there exist m; n 2 N such that A 2 Fm and B 2 Fn.
Suppose that m 6 n, then A 2 Fn, too; hence A [ B 2 Fn since Fn is a field,
which implies that A [ B 2S1nD1 Fn.
b. See Broughton and Huff (1977).
ut
1.3 Existence and Extension
1.3.1 Construction of the Extension
1.4 Denumerable Probabilities
Limit Sets
Theorem 1.2 (Billingsley, 1995, Theorem 4.1). For each sequence fAng,
P�limAn
�6 lim P .An/ 6 lim P .An/ 6 P
�limAn
�(1.4)
Proof. Let Bn DT1kDnAk and Cn D
S1kDnAk . Then Bn " limAn and Cn #
limAn, so that
P�limAn
�D P
�limBn
�D lim P .Bn/ D lim P .Bn/ 6 lim P .An/ ;
and

SECTION 1.4 DENUMERABLE PROBABILITIES 7
P�limAn
�D P
�limCn
�D lim P .Cn/ D lim P .Cn/ > lim P .An/ :
Since lim P .An/ 6 lim P .An/, we get the conclusion. ut
Independent Events
Theorem 1.3 (Billingsley, 1995, Theorem 4.2). If A1; : : : ;An are independent
and each Ai is a �-system, then � .A1/ ; : : : ; � .An/ are independent.
Proof. We here prove that L is a �-system. Clearly, ˝ 2 L. If B1 2 L, then
P�Bc1 \ B2 \ � � � \ Bn
�D P
�.B2 \ � � � \ Bn/ X B1
�D P .B2 \ � � � \ Bn/ � P
�.B2 \ � � � \ Bn/ \ B1
�D
nYiD2
P .Bi / �nY
jD1
P�Bj�
D�1 � P .B1/
� nYiD2
P .Bi /
D P�Bc1�
P .B2/ � � �P .Bn/ ;
i.e., Bc1 2 L. To see L is closed under disjoint unions, let fB1kgnkD1 � L be
disjoint. We have
P
0B@0@[
k
B1k
1A \ B2 \ � � � \ Bn1CA D P
0@[k
.B1k \ B2 \ � � � \ Bn/
1AD
Xk
P .B1k \ B2 \ � � � \ Bn/
D
Xk
P .B1k/P .B2/ � � �P .Bn/
D
0@Xk
P .B1k/
1AP .B2/ � � �P .Bn/
D P
0@[k
B1k
1AP .B2/ � � �P .Bn/ ;
and this proves thatSk B1k 2 L. ut

8 CHAPTER 1 PROBABILITY
Borel-Cantelli Lemmas
Theorem 1.4 (Billingsley, 1995, Theorem 4.4). If fAng is an independent se-
quence of events andPn P .An/ diverges, then P
�limnAn
�D 1.
Proof.
P
0@ 1\kDn
Ack
1A D 1YkDn
P�Ack�D
1YkDn
�1 � P .Ak/
�61YkDn
exp��P .Ak/
�
D exp
24� 1XkDn
P .Ak/
35 : ut
Problems
I Exercise 6 (4.1). 3 "
Proof. ut
1.5 Denumerable Probabilities
ω1 ω2
Figure 1.8.
`1.!1/ D 5 since d1.!1/ D d2.!1/ D d3.!1/ D d4.!1/ D d5.!1/ D 0 and
d6.!1/ D 1. Similarly, `1.!2/ D 0.

References
[1] Billingsley, P. (1995), Probability and Measure, Wiley Series in Probabil-
ity and Mathematical Statistics, New York: Wiley-Interscience, 3rd edition.
[i, 6, 7, 8]
[2] Broughton, A. and B. W. Huff (1977), “A Comment on Unions of Sigma-
Fields.” American Mathematical Monthly, 84 (7): 553–554. [6]
9
Introduction to Topological Manifolds
Jianfei Shen


Contents
Chapter 1. Introduction 1
Chapter 2. Topological Spaces 31. Problems in Text 32. Bases 83. Manifolds 94. Problems 9
Chapter 3. New Spaces from Old 131. Problems in Text 132. Product Spaces 143. Quotient Spaces 16
Chapter 4. Connectedness and Compactness 191. Connectedness 192. Compactness 20
Chapter 5. Simplicial Complexes 211. Euclidean Simplicial Complexes 21
Bibliography 25
i

CHAPTER 1
Introduction
No exercises.
1


CHAPTER 2
Topological Spaces
1. Problems in Text
1.1. Topologies.
Exercise 1 (2.1, p. 19). The proofs for (a)–(c) are trivial. For (d), let (M , d ) be a metricspace, and T be the collection of all subsets of M that are open in the metric spacesense. Refer (Gamelin and Greene, 1999, Chapter 1) for a detailed discussion.
Exercise 2 (2.2, p. 20). Easy.
Exercise 3 (2.3, p. 20).
(a) In a discrete topological space (X ,T ),�
q
is open if q ∈ X since�
q
∈ 2X = T .This implies that if qi →q , then there exists N ∈N such that qi =q when i >N .
(b) In a trivial (indiscrete) topological space (Y ,T ), there are only two open sets:T = {∅, Y }, and the only neighborhood containing q is Y .
Exercise 4 (2.4, p. 21).
(a) Any constant map f : X → Y is continuous: Without loss of generality, let f (x )≡y ∈ Y , ∀ x ∈ X . Pick any open subset U ⊆ Y . There are two cases: either y ∈Uor y /∈U . In the first case, f −1 (U ) = X ; in the second case, f −1 (U ) =∅. Both Xand ∅ are open in X .
(b) The identity map Id : X → X is continuous: Let U ⊆ X is open; then f (U ) =U isopen in X .
(c) If f : X → Y is continuous, so is the restriction of f to any open subset of X :Consider f �U , where U ⊆X is open. Pick any open subset V ⊆ Y . Then
�
f �U�−1 (V ) =
¦
x ∈U�
� f (x )∈V©
= f −1 (V )∩U
is open since both f −1 (V ) and U are.
Exercise 5 (2.5, p. 22). We need to show that ≈ is:
• reflexive: X ≈X with the Id : X →X ;• symmetric: Let X ≈ Y and f : X → Y is a homeomorphis. Then Y ≈ X with the
homeomorphism f −1;
3

4 2. TOPOLOGICAL SPACES
• transitive: Let X ≈ Y , Y ≈Z , and f : X → Y , g : Y →Z be two homeomorphisms.Then X ≈Z with the homeomorphism g ◦ f .
Exercise 6 (2.6, p. 23). ϕ : C → S2 is defined by
ϕ�
x , y , z�
=�
x , y , z�
p
x 2+ y 2+ z 2.
Notice that
max
‖x‖max
¦
‖x‖ ,
y
,‖z‖© ,
y
max¦
‖x‖ ,
y
,‖z‖© ,
‖z‖max
¦
‖x‖ ,
y
,‖z‖©
= 1.
This proves that
ϕ−1 =�
x , y , z�
max¦
‖x‖ ,
y
,‖z‖© .
Exercise 7 (2.7, p. 23). Let a : [0, 1)→ S1 with a (t ) = (cos 2πt , sin 2πt ). a (t ) is continu-ous since both cos 2πt and sin 2πt are continuous; it is easy to see that a (t ) is bijective.In this case, a−1 : S1→ [0, 1) exists and
�
a−1�−1= a .
Hence, to show a−1 is not continuous, we need to show that there exists closed subsetof F ⊆ [0, 1) such that the image of A under a is not closed in S1 [see Exercise 9]. LetA =
�
12
, 1�
. Then A is closed in [0, 1), but a (A) is not closed in S1.
Exercise 8 (2.8, p. 24). Let f : X → Y .
(a) Every local homeomorphism is an open map: pick any open set U ⊆ X and anyx ∈U . Since f is a local homeomorphism, there is a neighborhood Vx of x suchthat f (Vx )⊆openY and f �Vx is a homeomorphism. Then Vx ∩U ⊆ Vx⊆openX and�
f �Vx�
(Vx ∩U )⊆open f (Vx ) is open in Y . Since
U =⋃
x∈U
(Vx ∩U ) ,
we conclude that
f (U ) = f
⋃
x∈U
(Vx ∩U )
!
=⋃
x∈U
�
f �Vx�
(Vx ∩U )
is open in Y , that is, f is open.(b) Every homeomorphism is a local homeomorphism: For any x ∈ X , take X as its
neighborhood.

1. PROBLEMS IN TEXT 5
(c) A bijective continuous open map is a homeomorphism: Just notice that in thiscase,
�
f −1�−1 = f .
(d) A bijective local homeomorphism is a homeomorphism: By definition, a localhomeomorphism is continuous; by (a), a local homeomorphism is open; thenthe conclusion follows from (c).
Exercise 9 (2.9, p. 25). If f is continuous and F is closed in Y , then Y \ F is open in Y ,so
f −1 (Y \ F ) =X \ f −1 (F ) ,
is open in X , and f −1 (F ) is closed in X .Conversely, suppose that f −1 (F ) is closed in X when F is closed in Y . If U is open in
Y , then
f −1 (Y ) \U =X \ f −1 (U )
is closed in X , and f −1 (U ) is open in X .
Exercise 10 (2.10, p. 26, Lemma 2.8). Let X be a topological space and A ⊆X any subset.
(a) A point q is in the interior of A if and only if q has a neighborhood contained inA.
(b) A point q is in the exterior of A if and only if q has a neighborhood containedin X \A.
(c) A point q is in the boundary of A if and only if every neighborhood of q containsboth a point of A and a point of X \A.
(d) Int A and Ext A are open in X , while ∂ A is closed in X .
(e) A is open if and only if A = Int A.
(f ) A is closed if and only if it contains all its boundary points, which is true if andonly if A = Int A ∪ ∂ A.
(g) A = A ∪ ∂ A = Int A ∪ ∂ A.�
PROOF.

6 2. TOPOLOGICAL SPACES
(a) If q ∈ Int A =⋃¦
C ⊆X�
�C ⊆ A and C⊆openX©
, then Int A is such a neighbor-hood. On the other direction, suppose that q ∈ C ⊆ A and C⊆openX . ThenC ∈
⋃¦
C ⊆X�
�C ⊆ A and C⊆openX©
and so q ∈ Int A.
(b) Suppose that q ∈ Ext A =X \A =X \�
⋂¦
B ⊆X�
� B ⊇ A and B⊆closedX©
�
. Since A
is closed, X \A is open. Further, since A ⊆ A, we conclude that X \A ⊆X \A. Nowsuppose that q ∈U ⊆X \A and U⊆openX . It is evident that A ⊆X \U⊆closedX andq /∈X \U , that is, there exists an closed subset of X containing A which does notcontain q ; hence q /∈ A, or equivalently, q ∈X \A = Ext A.
(c) Suppose that q ∈ ∂ A = X \ (Int A ∪Ext A) and U is any neighborhood of q . Notethat
X \ (Int A ∪Ext A) = (X \ Int A)∩ (X \Ext A) .
Hence, q is not an interior point of A since q ∈ X \ Int A; by (a), q ∈U * A, i.e.,there exists a point x ∈X \A such that x ∈U . Similarly, q is not an exterior pointof A since q ∈X \Ext A; by (b), q ∈U *X \A, i.e., there exists a point y ∈ A suchthat y ∈U .
For the inverse direction, suppose that every neighborhood of q containsboth a point of A and a point of X \ A. Then q /∈ Int A and q /∈ Ext A by thesimilar argument in the previous paragraph. Hence, q ∈X \(Int A ∪Ext A) = ∂ A.
(d) By definition, Int A is a union of open sets of X , so it is open. Similarly, A is aintersection of closed sets of X , so A is closed and consequently, Ext A =X \A isopen. As for ∂ A, not that ∂ A =X \ (Int A ∪Ext A), so it is closed.
(e) First suppose that A⊆openX , then A is “the largest open set contained in A”, andso A = Int A. Conversely, let A = Int A. By (d), Int A⊆openX , and so A is open.
(f) Suppose that A⊆closedX . Then A is “the smallest closed set containing A”, andso A = A =X \Ext A. Therefore, ∂ A =X \(Int A ∪Ext A) = (X \ Int A)∩(X \Ext A)⊆X \Ext A = A.
Conversely, suppose that ∂ A ⊆ A. We show that A = X \Ext A = A, which isclosed by (d). It is easy to see that
A ⊆ A =X \Ext A.
For the other inclusion direction, note that Int A ⊆ A and ∂ A ⊆ A by hypothesis,and so
Int A ∪ ∂ A ⊆ A =⇒X \Ext A = Int A ∪ ∂ A ⊆ A.

1. PROBLEMS IN TEXT 7
(g) By definition,
A =X \Ext A
= (Int A ∪ ∂ A ∪Ext A) \Ext A
= Int A ∪ ∂ A.
Now note that Int A∪∂ A ⊆ A∪∂ A since Int A ⊆ A; hence, A ⊆ A∪∂ A. Further,
∂ A =X \ (Int A ∪Ext A)
= (X \ Int A)∩ (X \Ext A)
⊆X \Ext A
= A.
This fact combining with A ⊆ A produces the other inclusion direction A∪∂ A ⊆A. Thus, A = A ∪ ∂ A = Int A ∪ ∂ A, as claimed.
�
Exercise 11 (2.11, p. 26). Show that a set A in a topological space is closed if and only ifit contains all of its limit points.
�
PROOF. Let X be a topological space and A⊆closedX . Let A ′ be the set of all limit pointsof A, and let q ∈ A ′. Suppose that q ∈ X \ A. Since X \ A⊆openX , X \ A = Int (X \A) byExercise 10 (e), there is a neighborhood of q such that U ⊆ X \A by Exercise 10 (a), andin this case U ∩A =∅. Contradicts the definition of a limit point.
Conversely, suppose that A ′ ⊆ A. Choose any point q ∈ X \A. Then q /∈ A ′ and sothere exists a neighborhood of q , U , such that U ⊆ X \A, that is, q ∈ Int (X \A), for anyq ∈X \A. Hence, X \A = Int (X \A) and X \A⊆openX . Therefore, A is closed in X .
Munkres (2000) provides an alternative proof. �
Exercise 12 (2.12, p. 27). Show that a subset A ⊆X is dense if and only if every nonemptyopen set in X contains a point of A.
�
PROOF. First suppose that A is dense, that is, A = X . Choose any nonempty opensubset U . If U ∩A =∅, then Ext A 6=∅ since any point in U is an exterior point of A. Inthis case, A =X \Ext A 6=X . A contradiction.
8 2. TOPOLOGICAL SPACES
Now suppose that every nonempty open set in X contains a point of A. For any x ∈X , choose one neighborhood U of x . Since U ∩A 6=∅, x /∈ Ext A. Hence, x ∈ Int A ∪ ∂ A.By Exercise 10 (g), A = Int A ∪ ∂ A, so x ∈ A, which means that X = A. �
Exercise 13 (2.13, p. 27). Show that Rn has a countable dense subset.�
PROOF. Q is such a set. �
Exercise 14 (2.14, p. 27). Show that a bijective continuous map is a homeomorphism ifand only if it is open if and only if it is closed.
�
PROOF. See Exercise 8. �
2. Bases
Exercise 15 (2.15, p. 29). In each of the following cases, prove that the given setB is abasis for the given topology.
(a) M is a metric space with the metric topology, andB is the collection of all openballs in M .
(b) X is set with the discrete topology, and B is the collection of all one-pointsubsets of X .
(c) X is a set with the trivial topology, andB = {X }.�
PROOF.
(a) By definition, a subset U in a metric space is open if for each point q ∈U thereis an open ball such that x ∈U ⊆X .
(b) For any set U ⊆X and any point q ∈U , we have q ∈�
q
.
(c) In the trivial topology, there are just two open sets: ∅ and X .
�
Exercise 16 (2.16, p. 29). Omitted.

4. PROBLEMS 9
3. Manifolds
Exercise 17 (2.17, p. 32). Show that the only Hausdorff topology on a finite set is thediscrete topology.
�
PROOF. Let X = {x1, . . . ,xn} be a Hausdorff space. It suffices to show that for anypoint x i ∈ X , the singleton {x i } is open. Choose any x j ∈ X such that x j 6= x i . Thenthere exist neighborhood Ui for x i and Uj for x j such that Ui ∩Uj =∅. It is evident that{x i }∩Uj =∅, and hence x j ∈ Int (X \ {x i }), for any x j ∈X \{x i }. Therefore, X \{x i }⊆openX ,or equivalently, {x i }⊆closedX , for any x i ∈ X . Since X is finite,
⋃
x j ∈X\{x i }
¦
x j
©
⊆closedX ,
which implies that {x i }=X \�
⋃
x j ∈X\{x i }
¦
x j
©
�
⊆openX . �
4. Problems
Exercise 18 (2-1). Let (X1,T1) and (X2,T2) be topological spaces and let f : X1→ X2 be abijective map. Show that f is a homeomorphism if and only if f (T1) = T2 in the sensethat U ∈T1 if and only if f (U )∈T2.
�
PROOF. Let (X1,T1) and (X2,T2) be two topologies, and f : X1 → X2 be a bijection.Define
(A) f is a homeomorphism,
and
(B) U ∈T1 ⇐⇒ f (U )∈T2.
It is easy to see that (A) =⇒ (B), so we focus on the direction of (B) =⇒ (A). Wefirst show that f is continuous. Let V ∈ T2, then by (B) there exists U ∈ T1 such thatf (U ) =V . Hence,
f −1 (V ) =U ∈T1, ∀V ∈T2,
which proves that f is continuous. Similarly, we can show that f −1 is continuous, too.�

10 2. TOPOLOGICAL SPACES
Exercise 19 (2-2). Suppose X is a set, and B is any collection of subsets of X whoseunion equals X . Let T be the collection of all unions of finite intersections of elementsofB . (Note that the empty set is the union of the empty collection of sets.)
(a) Show that T is a topology. (It is called the topology generated byB , andB iscalled a subbasis for T .)
(b) Show that T is the “smallest” topology for which all the sets in B are open;more precisely, show that T is the intersection of all topologies containingB .
�
PROOF. LetB ⊆ 2X such that X =⋃
B .
(a) It suffices to show that the collection C of all finite intersection of elements ofB is a basis. Given x ∈ X , it belongs to an element ofB and hence to an ele-ment ofC ; this is the first condition for a basis. To check the second condition,let
C1 = B1 ∩ · · · ∩ Bm and C2 = B ′1 ∩ · · · ∩ B ′nbe two elements ofC . Their intersection
C1 ∩C2 = (B1 ∩ · · ·Bm )∩�
B ′1 ∩ · · · ∩ B ′n�
is also a finite intersection of elements ofB , so it belongs toC .
(b) Let T ′ is any topology containingB . Then any finite intersection of elementsof B is in T ′ and any union of these sets is in T ′. This proves that T is thesmallest topology containingB . Since any intersection of topologies is a topol-ogy, the second result is proved.
�
Exercise 20 (2-3). Let X be an infinite set. Consider the following collections of subsetsof X :
T1 =¦
U ⊆X�
�X \U is finite or is all of X©
;
T2 =¦
U ⊆X�
�X \U is infinite or is empty©
;
T3 =¦
U ⊆X�
�X \U is countable or is all of X©
.
For each collection, determine whether it is a topology.�
PROOF.

4. PROBLEMS 11
(a) T1 is a cofinite topology. First, both X and ∅ are in T1; next, if U1, . . . ,Un ∈ T1,then
X \
n⋂
i=1
Ui
!
=n⋃
i=1
(X \Ui )
is finite, that is,⋂n
i=1 Ui ∈T1; finally, if {Uα}α∈Λ ⊆T1, then
X \
⋃
α∈Λ
Uα
!
=⋂
αΛ
(X \Uα)
is finite, that is,⋃
α∈ΛUα ∈T1.
(b) T2 is a topology.
(c) Note that it is not necessary that X ∈T3.
�
Exercise 21 (2-4). Let X = {1, 2, 3}. Give a list of topologies on X such that any topologyon X is homeomorphic to exactly one on your list.
�
SOLUTION. �


CHAPTER 3
New Spaces from Old
1. Problems in Text
1.1. Subspaces.
Exercise 22 (3.1, p. 39). Let (X ,T ) be a topological space, A ⊆X , and
TA =¦
U ⊆ A�
�U = A ∩V for some open set V ⊆X©
.
We need to show that (A,TA) is subspace [TA is the subspace topology]. TA contains ∅and A because
∅= A ∩∅ and A = A ∩X ,
where ∅ and X are elements of T . The fact that TA is closed under finite intersectionsand arbitrary unions follows the equations
(A ∩U1)∩ · · · ∩ (A ∩Un ) = A ∩ (U1 ∩ · · · ∩Un ) ,⋃
(A ∩Uα) = A ∩�⋃
Uα
�
.
Exercise 23 (3.2, p. 40). By the theorem that a subset U of A ⊆M , where M is a metricspace, is open in A if and only if U = A ∩V for some open subset V of M (Gamelin andGreene, 1999, Theorem 1.6).
Exercise 24 (3.3, p. 43).
(d) The closed subsets of A are precisely the intersections of A with closed subsets ofX . Proof: If E is relatively closed in A, then A \ E is relatively open in A, so thatthere is an open subset U of X such that A\E =U∩A. Then E is the intersectionof A and the closed subset X \U of X :
E = A \ (A \E )
= A ∩ (U ∩A)c
= A ∩ (X \U ) .
Conversely, if E = T ∩A, where T is a closed subset of X , then A \ E is theintersection of A and the open subset X \T of X , so that A \E is relatively openin A and E is relatively closed in A.
13

14 3. NEW SPACES FROM OLD
(f) If B ⊆ A ⊆ X , B is open in A, and A is open in X , then B is open in X . Proof: IfA is open in X , then relatively open subsets of A are open in X , since they havethe form A ∩U , where U is open in X .
(h) Any subspace of a Hausdorff space is Hausdorff. Proof: Let A be a subspace ofa Hausdorff space X and let q1 and q2 be two distinct points in A. Since X isHausdorff there are two open sets U1 and U2 in X such that q1 ∈U1, q2 ∈U2, andU1 ∩U2 =∅. Hence, q1 ∈ A ∩U1, q2 ∈ A ∩U2, and
(A ∩U1)∩ (A ∩U2) = A ∩ (U1 ∩U2) = A ∩∅=∅.
Since A ∩U1 and A ∩U2 are open in A, it follows that A is Hausdorff.(i) Any subspace of a second countable space is second countable. Proof: Since X
is second countable, it admits a countable basisB . By (Lee, 2000, Proposition3.4 (g)),BA =
�
A ∩ B | B ∈B
is a basis of A, and it is countable.
Exercise 25 (3.4, p. 46-47). Let X be a topological space, and suppose X = A1 ∪ · · · ∪Ak ,where A i is closed in X . For each i , let f i : A i → Y be a continuous map such that f i ��
A i ∩A j
�
= f j ��
A i ∩A j
�
. There exists a unique continuous map f : X → Y such thatf � A i = f i for each i .
PROOF. Let f : X → Y be defined as f (x ) = f i (x ) if x ∈ A i . Let C be a closed subset ofY . Now
f −1 (C ) =k⋃
i=1
f −1i (C ) .
Since f i is continuous, f −1i (C ) is closed in A i and, therefore, closed in X . Their union
f −1 (C ) is thus closed in X . �
2. Product Spaces
Exercise 26 (3.5, p. 48). The first condition is trivial, since X1× · · · ×Xn is itself a basiselement. For the second condition, note that
(U1× · · ·×Un )∩ (V1× · · ·×Vn ) = (U1 ∩V1)× · · ·× (Un ∩Vn )
is a basis element because Ui ∩Vi are open in X i .
Exercise 27 (3.7, p. 50, Proposition 3.12). Let X1, . . . , Xn be topological spaces.
(a) The projection maps πi : X1× · · ·×Xn →X i are all continuous.(b) The product topology is “associative” in the sense that the three product topolo-
gies X1×X2×X3, (X1×X2)×X3, and X1× (X2×X3) on the set X1×X2×X3 are allequal.

2. PRODUCT SPACES 15
(c) For any i and any points x j ∈X j , j 6= i , the map f i : X i →X1× · · ·Xn given by
f i (x ) = (x1, . . . ,x i−1,x ,x i+1, . . . ,xn )
is a topological embedding1 of X i into the product space.(d) If for each i ,Bi is a basis for the topology of X i , then the set
�
B1× · · ·× Bn | Bi ∈Bi
is a basis for the product topology on X1× · · ·×Xn .(e) If A i is a subspace of X i , for i = 1, . . . , n , the product topology and the subspace
topology on A1× · · ·×An ⊆X1× · · ·×Xn are equal.(f) If each X i is Hausdorff, so is X1× · · ·×Xn .(g) If each X i is second countable, so is X1× · · ·×Xn .
PROOF.
(a) If Ui is an open subset of X i , then
π−1i (Ui ) =X1× · · ·×X i−1×Ui ×X i+1× · · ·×Xn
is a basic open set. It follows that each projection πi is continuous.(b) Omitted.(c) It is evident that f i : X i →X =X1×· · ·×Xn is injective. We then show f i : X i →X
is continuous. If U = U1 × · · · ×Un is a nonempty basic open set in X , thenf −1
i (U ) =Ui is open. Since
f −1i =πi � {x1}× · · ·×
�
x i−1
×X i ×�
x i+1
× · · ·× {xn} ,
that is, f −1i is the restriction of the projection πi to the slice {x1}× · · ·×
�
x i−1
×X i ×
�
x i+1
×· · ·×{xn}, f −1i is also continuous and f i is a homeomorphism from
X i to {x1}× · · ·×�
x i−1
×X i ×�
x i+1
× · · ·× {xn}.(d) We prove that every open subset of X =X1×· · ·×Xn satisfies the basis criterion
with respect toB =�
B1× · · ·× Bn | Bi ∈Bi
. Given an open subset V of X anda point q =
�
q1, . . . ,qn�
∈ V , by the definition of the product topology there is abasis element U1×· · ·×Un =U such that q ∈U ⊆V . BecauseBi ’s are bases forX i ’s, we can choose an element Bi ofBi such that qi ∈ Bi ⊆Ui , for all i . Then
q ∈ Bi × · · ·× Bn ⊆U ⊆V .
Thus the collectionB is a basis of the product topology.(e) These two topologies are generated by the following same basis:
�
(A ∩ B1)× · · ·× (A ∩ Bn ) | Bi ∈Bi
.
1An injective continuous map that is a homeomorphism onto its image (in the subspace topology).

16 3. NEW SPACES FROM OLD
(f) Let x = (x1, . . . ,xn ) and y =�
y1, . . . , yn�
be distinct points of X . Choose an indexi such that x i 6= yi . Let Ui and Vi be disjoint (open) neighborhoods of x i and yi ,respectively, in X i . Then π−1
i (Ui ) and π−1i (Vi ) are disjoint open neighborhoods
of x and y , respectively, in X .(g) This is because
�
B1× · · ·× Bn | Bi ∈Bi
is a basis of the product topology on X .
�
3. Quotient Spaces
Exercise 28 (3.8, p. 52). Show that the quotient topology is indeed a topology.�
PROOF. By definition,
• π−1 (∅) =∅ and π−1 (Y ) =X are open in X , so ∅ and Y are open in Y ;• Let U1, . . . ,Un are open in Y , that is, π−1 (U1) , . . . ,π−1 (Un ) are open in X , then
π−1
n⋂
i=1
Ui
!
=n⋂
i=1
π−1 (Ui )
is open in X , so⋂n
i=1 Ui is open in Y ;• Similarly, it can be shown that the collection is closed under arbitrary union.
�
Exercise 29 (3.9, p. 53, Lemma 3.16). A continuous surjectiv mapπ : X → Y is a quotientmap2 if and only if it takes saturated open sets to open sets, or saturated closed sets toclosed sets. �
PROOF. Letπ : X → Y be a continuous surjective map. Let U ⊆X be a saturated openset, that is, U =π−1 (V ) for some subset V ⊆ Y and U is open in X .
First, suppose that π is a quotient map. Then
π (U ) =π�
π−1 (V )�
=V.
Since U = π−1 (V ) is open in X , V is open in Y by definition. Hence, π takes saturatedopen sets to open sets.
For the converse direction, suppose that π takes open saturated sets to open sets.Since π is continuous, it takes any open sets in Y to open sets in X ; we thus need onlyto prove that following claim:
π−1 (V )⊆openX =⇒V⊆openY .
3. QUOTIENT SPACES 17
Let π−1 (V ) be a saturated open set in X , then
π�
π−1 (V )�
=V
is open in Y . Hence, π is a quotient map. �
Exercise 30 (3.10, p. 53, Lemma 3.17). Suppose f : X → Y is a quotient map. Therestriction of f to any saturated open or closed set is a quotient map. More precisely, ifA ⊆X is a saturated open or closed set, then f � A : A→ f (A) is a quotient map.
�
PROOF. (Munkres, 2000, Theorem 22.1). We verify first the following equation:
(1)�
f � A�−1 (V ) = f −1 (V ) if V ⊆ f (A) .
To check (1), we note that since V ⊆ f (A) and A is saturated [A = f −1�
f (A)�
], f −1 (V ) iscontained in A. It follows that both f −1 (V ) and
�
f � A�−1 (V ) equal all points of A that
are mapped by f into V .Now suppose A is open. Given the subset V of f (A), we assume that
�
f � A�−1 (V )
is open in A and show that V is open in f (A). Since�
f � A�−1 (V ) is open in A and A is
open in X , the set�
f � A�−1 (V ) is open in X . Since
�
f � A�−1 (V ) = f −1 (V ), the latter set
is open in X , so that V is open in Y because f is a quotient map. In particular, V is openin f (A). �

CHAPTER 4
Connectedness and Compactness
1. Connectedness
Exercise 31 (4.1, p. 72). Show that ∼p is an equivalence relation.�
PROOF. The fact that x ∼p x for each x ∈X follows from the existence of the constantpath f : [0, 1]→ X defined by the equation f (t ) = x for all t ∈ [0, 1]. Symmetry followsfrom the fact that if f : [0, 1] → X is a path from x to y , then the “reverse path” g :[0, 1]→ X defined by g (t ) = f (1− t ) is a path from y to x . Finally, transitivity is provedas follows: Let f : [0, 1]→ X be a path from x to y , and let g : [1, 2]→ X be a path from yto z . We can “paste f and g together” to get a path h : [0, 2]→ X from x → z ; the path hwill be continuous by the gluing lemma. �
Exercise 32 (4.2, p. 72, Proposition 4.15). Let X be any space.
(a) Each path component is contained in a single component, and each compo-nent is a disjoint union of path components.
(b) If A ⊆X is path connected, then A is contained in a single path component.�
PROOF.
(a) If P is a path component, then P is connected. The result is then from Proposi-tion 4.14 (b).
(b) Suppose that A ⊆ X is path connected. Since the path components cover X , Ahas a point in common with some path component P . Let this point be q . Forany point p ∈ A, p ∼p since A is path connected; however, q ∼p r for any r ∈ P .Then by the transitivity, p ∼p r , that is, p ∈ P .
�
19

20 4. CONNECTEDNESS AND COMPACTNESS
Exercise 33 (4.3, p. 73, Proposition 4.17). Every manifold is locally path connected.�
PROOF. M has a basis of coordinate balls, and every coordinate ball is path con-nected. See (Lee, 2003, Proposition 1.8). �
2. Compactness
Exercise 34 (4.4, p. 76). Let X be a compact space, and suppose {Fn} is a countablecollection of nonempty closed subsets of X that are nested, which means that Fn ⊇ Fn+1
for each n . Show that⋂
n Fn is nonempty.�
PROOF. It is easy to see that any finite intersection of Fn ’s is nonempty. Let Un =X \ Fn . Suppose that
⋂
n Fn =∅. Then⋃
n Un =X since
⋃
n
Un =⋃
n
(X \ Fn ) =X \
⋂
n
Fn
!
.
In this case, {Un} is an open cover of X . Since X is compact, there exist a finite Un ’s, say,U1, . . . ,Um , which covers X . Then
X =m⋃
i=1
Ui =⇒m⋂
i=1
Fi =X \
m⋃
i=1
Ui
!
=∅.
A contradiction. �
Remark 1. See (Munkres, 2000, p. 169-170) for a detained discussion for this issue.
CHAPTER 5
Simplicial Complexes
1. Euclidean Simplicial Complexes
Exercise 35 (5.1, p. 93). A simplex is the convex hull of its vertices.�
PROOF. Let V = {v0, v1, . . . , vk }. The convex hull of V , co (V ), is the set of convexcombinations of elements of V (Gamelin and Greene, 1999, Exercise 4.6-4.8, p. 177),which is just the definition of a simplex, ⟨v0, . . . , vk ⟩. �
Exercise 36 (5.2, p.93).
(a) Show that given any map f 0 from the set of vertices ofσ to the set of vertices ofτ, there is a unique simplicial map f : σ→ τ whose restriction to the verticesofσ is f 0.
(b) Show that any two k -simplices are homeomorphic by a simplicial homeomor-phism.
(c) Show that every k -simplex is homeomorphic to Bk .�
PROOF.
(a) Let {v0, . . . , vk } be the set of vertices of σ. Then�
f 0 (v0) , . . . , f 0 (vk )
is the set
of vertices of τ. Let f : σ → τ be defined as follows: for any v =∑k
i=0 t i vi ∈⟨v0, . . . , vk ⟩,
f (v ) = f
k∑
i=0
t i vi
=k∑
i=0
t i f 0 (vi ) .
It is evident that f is affine [actually, linear], and note that
f (vi ) = f (0v0+ · · ·+0vi−1+vi +0vi+1+ · · ·+0vk ) = f 0 (vi )
for any vertex vi .
21

22 5. SIMPLICIAL COMPLEXES
We then show that f is unique. Suppose there is another function g :σ→τsatisfying the requirements. Then
g (v ) = g
k∑
i=0
t i vi
=k∑
i=0
t i g (vi )
=k∑
i=0
t i f 0 (vi )
= f (v ) ,
for any v ∈ ⟨v0, . . . , vk ⟩, that is, g = f .
(b) Let σ = ⟨u 0, . . . , u k ⟩ and τ = ⟨v0, . . . , vk ⟩ be two k -simplices, and f : σ → τ bedefined as follows:
f (vi ) = u i ,
f (v ) = f
k∑
i=0
t i vi
=k∑
i=0
t i u i .
(c) See Gamelin and Greene (1999, Exercise 4.3.1).
�
Exercise 37 (5.4, p. 95). Let K and L be Euclidean simplicial complexes.
(a) Let f 0 : K (0)→ L(0) be any map with the property that whenever {v0, . . . , vk } arethe vertices of a simplex of K ,
�
f 0 (v0) , . . . , f 0 (vk )
are the vertices of a simplexof L (possibly with repetitions). Show that there is a unique simplicial mapf : K → L whose vertex map is f 0.
(b) Now let f 0 be as in (a), and assume in addition that f 0 is bijective and {v0, . . . , vk }are the vertices of a simplex of K if and only if
�
f 0 (v0) , . . . , f 0 (vk )
are the ver-tices of a simplex of L. Show that |K | and |L| are homeomorphic by a simplicialmap.
�
PROOF. Let K be a simplicial complex with vertices v0, . . . , vn . Every point v ∈ |K |belongs to the interior of exactly one simplex in K . Letting σ = co (v0, . . . , vk ) be this
1. EUCLIDEAN SIMPLICIAL COMPLEXES 23
simplex, we have
v =k∑
i=0
λi vi withk∑
i=0
λi = 1 and λi > 0 for all i .
Setting b i (v ) =λi for 0≤ i ≤ k and b i (v ) = 0 for k +1≤ i ≤ n , we have
v =n∑
i=0
b i (v )vi
and we call the b i (v ) the barycentric coordinates of v in K . We use barycentric coordi-nates to construct continuous maps.
(a) Let f 0 : K (0) → L(0) be a vertex map. Then f 0 can be extended to a continuousmap f : |K | →|L| defined by
f (v ) =n∑
i=0
b i (v ) f 0 (vi ) ,
the simplicial map induced by f 0.
(b) Straightforward.
�
Exercise 38. �

Bibliography
Gamelin, Theodore W. and Robert Everist Greene (1999), Introduction to Topology, NewYork: Dover Publications, Inc. 2nd edition. [3, 13, 21, 22]
Lee, John M. (2000), Introduction to Topological Manifolds, 202 of Graduate Texts inMathematics, New York: Springer-Verlag. [14]
(2003), Introduction to Smooth Manifolds, 218 of Graduate Texts in Mathematics,New York: Springer-Verlag. [20]
Munkres, James R. (2000), Topology, New Jersey: Prentice Hall, Inc. 2nd edition. [7, 17,20]
25

A First Look at Rigorous
Probability Theory
A Solution Manual for Rosenthal (2006)
Jianfei Shen
School of Economics, The University of New South Wales
Sydney, Australia October 15, 2011

Jianfei Shen
School of Economics
The University of New South Wales
Sydney 2052
Australia



Contents
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
1 The Need for Measure Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Probability Triples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3 Further Probabilistic Foundations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
v

Preface
Sydney, Jianfei Shen
October 15, 2011
vii


Acknowledgements
ix


1THE NEED FOR MEASURE THEORY
I Exercise 1 (1.3.1). Suppose that ˝ D f1; 2g, with P Œ¿� D 0 and P Œ f1; 2g� D 1.
Suppose P Œ f1g� D 1=4. Prove that P is countable additive if and only P Œ f2g� D 3=4.
Proof. P is countably additive iff P Œ f1; 2g� D P Œ f1g [ f2g� D P Œ f1g� C P Œ f2g�;
hence, P Œ f2g� D 1 � 1=4 D 3=4. ut
I Exercise 2 (1.3.2). Suppose ˝ D f1; 2; 3g and F is the collection of all subsets
of ˝. Find (with proof) necessary and sufficient conditions on the real numbers
x, y, and z, such that there exists a countable additive probability measure P on
F , with x D P Œ f1; 2g�, y D P Œ f2; 3g�, and z D P Œ f1; 3g�.
Solution. Let P be a countable additive probability measure on F . Let P Œ f1g� D
p1, P Œ f2g� D p2, and P Œ f3g� D p3. Then p1 C p2 C p3 D 1. Since P is countably
additive, we have
x D p1 C p2; y D p2 C p3; and z D p1 C p3:
Thus, x; y; z 2 Œ0; 1�, and x C y C z D 2.p1 C p2 C p3/ D 2.
Conversely, let x; y; z 2 Œ0; 1�, and x C y C z D 2.p1 C p2 C p3/ D 2. Define
P Œ¿� D 0; P Œ ˝� D 1; p1 D 1 � y; p2 D 1 � z; and p3 D 1 � x:
Then p1Cp2Cp3 D 3�.xCyCz/ D 1, and it is easy to see that P is a countable
additive probability measure on F . ut
I Exercise 3 (1.3.3). Suppose that ˝ D N is the set of positive integers, and P
is defined for all A � ˝ by P Œ A� D 0 if A is finite, and P Œ A� D 1 if A is infinite. If
P finitely additive?
Proof. No, P is not finitely additive. For example, let NE be the set of even
positive integers, NO the odd positive integers. Then NE and NO are disjoint
and N D NE [NO . But 1 D P ŒN� D 1 ¤ P Œ NE �C P Œ NO � D 2. ut
1

2 CHAPTER 1 THE NEED FOR MEASURE THEORY
I Exercise 4 (1.3.4). Suppose that ˝ D N, and P is defined for all A � ˝ by
P Œ A� D jAj if A is finite, and P Œ A� D 1 if A is infinite. This P is of course not a
probability measure, however we can still ask the following.
a. Is P finitely additive?
b. Is P countably additive?
Proof. Both answer are “Yes”. ut
I Exercise 5 (1.3.5).
a. In what step of the proof of Proposition 1.2.6 was (1.2.1) used?
b. Give an example of a countably additive set function P , defined on all subsets
of Œ0; 1�, which satisfies (1.2.3) and (1.2.5), but not (1.2.1).
Solution. (1.2.1) is used to show that 1 DP
r2Q P ŒH �. For (b), consider the
counting measure. ut

2PROBABILITY TRIPLES
I Exercise 6 (2.2.3). Prove that the collection J D˚all intervals contained in Œ0; 1�
is a semialgebra of subsets of ˝.
Proof. It is obvious that ¿ 2 J and Œ0; 1� 2 J. If I1; I2 2 J, then I1 \ I2 2 J
(it may be empty). Finally, if I 2 J, then Œ0; 1� X I is a disjoint union of two
intervals in J (some may be empty). ut
I Exercise 7 (2.2.5).
a. Prove that B0 D˚all finite unions of elements of J
is an algebra of subsets
of ˝.
b. Prove that B0 is not a � -algebra.
Proof. ˝ and ˝ are in B0 since them are in J. If B 2 B0, then
B D
n[iD1
Ji ; J1; : : : ; Jn 2 J:
Then Bc DTn
iD1 Jci . Since J c
i DSni
jD1 Jij (J is a semialgebra), we have
BcD
n\iD1
ni[jD1
Jij D
n1C���Cnn[jD1
n\iD1
Jij 2 B0:
Finally, let B1; : : : ; Bn 2 B0. Then
n[iD1
Bi D
n[iD1
ni[jD1
Jij 2 B0;
where Jij 2 J for each pair .i; j /.
But B0 is not a � -algebra. For example, we know that fx 2 Œ0; 1� W x 2 Qg 2 B0,
butS
x2Œ0;1�\Q fxg … B0. ut
I Exercise 8 (2.3.16). Prove that the extension .˝;M;P�/ constructed in the
proof of Theorem 2.3.1 must be complete.
3

4 CHAPTER 2 PROBABILITY TRIPLES
Proof. Let A 2M with P�ŒA� D 0, and B � A. Then for every E � ˝,
P�ŒBc\E� D P�ŒA \ Bc
\E�C P�ŒAc\ Bc
\E�
D P�ŒBc\E�:
Therefore,
P�ŒE� D P�ŒA \E�C P�ŒAc\E�
> P�ŒB \E�C P�ŒBc\E�I
that is, B 2M. ut
I Exercise 9 (2.4.3).
a. Prove that if I1; I2; : : : ; In is a finite collection of intervals, and ifSn
jD1 Ij � I
for some interval I , thenPn
jD1 P Œ Ij � > P Œ I �.
b. Prove that if I1; I2; : : : is a countable collection of open intervals, and ifS1jD1 Ij � I for some closed interval I , then
P1jD1 P Œ Ij � > P Œ I �.
c. If I1; I2; : : : is any countable collection of intervals, and ifS1
jD1 Ij � I for any
interval I , thenP1
jD1 P Œ Ij � > P Œ I �.
Proof.
(a) Let us relabel the endpoints of the intervals, from left to right, as a1 6 a2 6� � � am. Then for each Ij ,
P Œ Ij � D P Œ aj ; ajC1�C � � � C P Œ anj�1; anj�:
It is easy to see that
am � a1 6nX
jD1
P Œ Ij �:
Now, if I � Œa1; am�, then P Œ I � 6 am � a1 D P Œ a1; am� 6Pn
jD1 P Œ Ij �.
(b) Now I is compact and˚Ij
consists of an open cover of I , so there exists a
finite subcover˚Iji
n
iD1covering I still. But then
P Œ I � 6nX
iD1
P Œ Iji� 6
1XjD1
P Œ Ij �:
(c) Take any " > 0. For each Ij with endpoints aj and bj , extend it as I 0j D
.aj � "=2jC1; bj C "=2
jC1/. Similarly, let the endpoints of I be c and d . Decrease
I to I 0 D Œc C "=2; d � "=2�. Then

CHAPTER 2 PROBABILITY TRIPLES 5
P Œ I � D I 0 C 2"
61X
jD1
P Œ I 0j �C "
D
1XjD1
P Œ Ij � � "C "
D
1XjD1
P Œ Ij �: ut
I Exercise 10 (2.4.7).
a. Prove that K;Kc 2 B, where B are the Borel subsets of Œ0; 1�.
b. Prove that K;Kc 2M, where M is the � -algebra of Theorem 2.4.4.
c. Prove that Kc 2 B1.
d. Prove that K … B1.
e. Prove that B1 is not a � -algebra.
Proof. See Figure 2.1 for the Cantor set.
0 1
Figure 2.1. Cantor set K
(a) Kc 2 B since Kc is a countable unions of countable intervals, and so it is a
countable unions of intervals. Then K 2 B since K D Œ0; 1� XKc .
(b) K;Kc 2 B �M.
(c) Kc 2 B1 by (a).
(d) If K 2 B1, then K is a countable unions of intervals: K DS1
iD1 Ii . Since
P Œ Ii � > 0 for each i , we have P Œ K� > 0. A contradiction.
(e) Since K 2 B but K … B1, we know that B1 is not a � -algebra. ut
I Exercise 11 (2.5.6). Suppose P satisfies (2.5.5) for finite collections fDng.
Suppose further that, whenever A1; A2; : : : 2 J such that AnC1 � An andT1nD1An D ¿, we have limn!1 P Œ An� D 0. Prove that P also satisfies (2.5.5)
for countable collections fDng.
Proof. Let fDng � J be disjoint withS
nDn D D 2 J. For each n, let
An D D X
0@ n[iD1
Di
1A :

6 CHAPTER 2 PROBABILITY TRIPLES
Then fAng decreases, and limnAn DT
nAn D ¿. Hence
P Œ An� D P ŒD X
0@ n[iD1
Di
1A�D P ŒD� � P Œ
n[iD1
Di �
D P Œ1[
jD1
Dn� �
nXiD1
P ŒDi �:
Take the limit and we get
P Œ1[
nD1
Dn� D
1XnD1
P ŒDn�: ut
I Exercise 12 (2.6.1). Let J D˚Aa1a2���an
W n 2 N; a1; : : : ; an 2 f0; 1g[ f¿; ˝g.
a. Verify that the above J is a semialgebra.
b. Verify that the above J and P satisfy (2.5.5) for finite collections fDng
Proof.
(a) ¿; ˝ 2 J by definition of J. Let Aa1���am; Ab1���bn
2 J with m 6 n. Then
Aa1���am\ Ab1���bn
D
˚¿ if ai ¤ bi for some i D 1; : : : ; m
Ab1���bnotherwise.
Finally, if Aa1���an2 J, then
Aca1���an
D
[b1���bn¤a1���an
Ab1���bn;
where b1; : : : ; bn 2 f0; 1g.
(b) For a finite collection fDng � J, there is k 2 N such that the results of only
coins 1 through k are specified by any Dn. Partition ˝ into the corresponding
2k subsets. ut

3FURTHER PROBABILISTIC FOUNDATIONS
I Exercise 13 (3.1.4). For Example 3.1.3, compute P Œ Z > a� and P Œ X <
a and Y < b� as functions of a; b 2 R.
Proof.
(a) We have
ŒZ > a� D Œ! W 3! C 4 > a� D�! W ! > .a � 4/=3
�I
hence,
P Œ Z > a� D
„.7 � a/=3 if 4 6 a 6 7
0 if a > 7
1 if a < 4:
0
a
P ŒZ > a�
1 2 3 4 5 6 7
Figure 3.1. PŒ Z > a�
(b)
ŒX < a� D Œ! W ! < a� ; ŒY < b� D�! W ! < b=2
�:
Let c D min fa; b=2g. Then
P Œ X < a and Y < b� D
„c if 0 6 c 6 1
1 if c > 1
0 if c < 0:
ut
7

References
[1] Rosenthal, Jeffrey S. (2006) A First Look at Rigorous Probability Theory,
Singapore: World Scientific, 2nd edition. [i]
9

Abstract AlgebraSolution Manual
Jianfei Shen


Contents
Chapter 1. Groups 11. Semigroups 12. Groups 33. Subgroups 44. Homomorphisms 55. The Isomorphism Theorems 7
Chapter 2. Structure of Groups 11
Chapter 3. Rings 131. Rings 132. Subrings and Ideals 153. Homomorphisms 184. Domains and Fields 205. Polynomials in One Variable 236. Polynomials in Several Variables 257. Formal Power Series 258. Principal Ideal Domains 25
Chapter 4. Field Extensions 271. Fields 272. Extensions 273. Algebraic Extensions 284. The Algebraic Closure 28
Chapter 5. Galois Theory 291. Splitting Fields 29
Chapter 6. Fields with Orders and Valuations 311. Ordered Fields 312. Real Fields 31
Bibliography 33
i


CHAPTER 1
Groups
1. Semigroups
Exercise 1 (1.1.1). x1 (x2x3x4), (x1x2) (x3x4), and (x1x2x3) x4.
Exercise 2 (1.1.2). x1 (x2x3x4x5), (x1x2) (x3x4x5), (x1x2x3) (x4x5), and (x1x2x3x4) x5.
Exercise 3 (1.1.3). (x1 · · · xk) (xk+1 · · · xn), where 1 ≤ k < n.
Exercise 4 (1.1.4). Define x1 · · · xn = ∏ni=1 xi =
(∏n−1
i=1 xi
)xi. It is trivial for n = 1, 2. If
n > 2, then by definition,
x1 · · · xn = (x1 · · · xk) (xk+1 · · · xn) ,
for some 1 ≤ k < n. Therefore, by induction and associativity:
x1 · · · xn = (x1 · · · xk) (xk+1 · · · xn)
=
(k
∏i=1
xi
)(n
∏i=k+1
xi
)
=
(k
∏i=1
xi
)( n−1
∏i=k+1
xi
)xn
=
( k
∏i=1
xi
)(n−1
∏i=k+1
xi
) xn
=
(n−1
∏i=1
xi
)xn
=k
∏i=1
xi.
Exercise 5 (1.1.5). Suppose e and e′ are both identity elements. Then
e = ee′ = e′.
1

2 1. GROUPS
Exercise 6 (1.1.6). Let S be a commutative semigroup, X = {x1, . . . , xn} ⊆ S, and σ : X →X be a bijection. We prove
n
∏i=1
xσ(i) =n
∏i=1
xi
by induction. It is obvious for n = 1. We assume it for n− 1. Let k be an integer such thatσ (k) = n. Then
n
∏i=1
xσ(i) =k−1
∏i=1
xσ(i) · xσ(k) ·n−k
∏i=1
xσ(k+i)
=k−1
∏i=1
xσ(i) ·n−k
∏i=1
xσ(k+i) · xσ(k).
Define a map ϕ of {1, . . . , n− 1} into itself by the rule
ϕ (i) =
{σ (i) , if i < kσ (i + 1) , if i ≥ k.
Thenn
∏i=1
xσ(i) =k−1
∏i=1
xϕ(i) ·n−k
∏i=1
xϕ(k−1+i) · xn
=n−1
∏i=1
xϕ(i) · xn,
which, by induction, is equal to x1 · · · xn, as desired.
Exercise 7 (1.1.7). Easy.
Exercise 8 (1.1.8). If AB 6= BA, then (AB)2 = ABAB = A (BA) B 6= A (AB) B = AABB =A2B2.
Exercise 9 (1.1.9). Let S be a semigroup, and A, B, C ⊆ S. To see (AB) C = A (BC), leta ∈ A, b ∈ B, c ∈ C, and then
x ∈ (AB) C ⇐⇒ x = (ab) c
⇐⇒ x = a (bc)⇐⇒ x ∈ A (BC) .
Exercise 10 (1.1.11). We only show (⋃
i∈I Ai) B =⋃
i∈I (AiB):
x ∈
⋃i∈I
Ai
B ⇐⇒ ∃ b ∈ B, i ∈ I and ai ∈ Ai such that x = aib
⇐⇒ ∃ i ∈ I such that x ∈ AiB
⇐⇒ x ∈⋃i∈I
(AiB) .

2. GROUPS 3
The claim of A(⋃
j∈J Bj
)=⋃
j∈J
(ABj
)can be proved in the same way.
2. Groups
Exercise 11 (1.2.1). Let x ∈ G, and x−1 and y be two inverses of x. Then
x−1 = 1x−1 = yxx−1 = y.
Exercise 12 (1.2.2). Let (S, ·) be a semigroup. We first show that every x ∈ S has a rightinverse: (
xx−1) (
xx−1)
= x(
x−1x)
x−1 = x(
ex−1)
= xx−1;
therefore,(xx−1
) (xx−1
)=(
xx−1)
=⇒(
xx−1)−1
[(xx−1
) (xx−1
)]=(
xx−1)−1 (
xx−1)
=⇒[(
xx−1)−1 (
xx−1)] (
xx−1)
=(
xx−1)−1 (
xx−1)
=⇒ e(
xx−1)
= e
=⇒ xx−1 = e,
that is, for any x ∈ S, we have x−1x = xx−1 = e.We now only need to prove that e is an identity. This is because:
xe = x(
x−1x)
=(
xx−1)
x = ex = x.
Exercise 13 (1.2.3). [I must be stupid—I spent several hours to prove this problem.] SinceS is a semigroup, we need only to prove 1 ∈ S and a ∈ S =⇒ a−1 ∈ S.
Pick any a ∈ S. We know that there is an element xea ∈ S such that
(1) axea = a.
Since xea ∈ S, we further know that there exist x−1
a , y−1a ∈ S such that the following equa-
tion holds:
(2) ax−1a = y−1
a a = xea.
Then, (ay−1
a
) (ay−1
a
)= a
(y−1
a a)
y−1a
= axeay−1
a
= ay−1a .
(3)
We then show that ay−1a is the identity of S. Notice that we can write any element
s ∈ S as follows:s = ays,

4 1. GROUPS
where ys ∈ S [equivalently, the equation ays = s has a solution in S]. Then(ay−1
a
)s =
(ay−1
a
) (ays)
= a(
y−1a a)
ys
= (axea) ys
= ays
= s.
This proves that there is a left identity element ay−1a . For simplicity, denote ay−1
a ≡ e, and esatisfies ee = e.
Moreover, since we have proved that e ∈ S, we know that every element a ∈ S has aleft inverse:
ax = e.
Finally, the conclusion that S is a group follows Exercise 12.
3. Subgroups
Exercise 14 (1.3.2). Let {Hi}i∈I ⊆ 2G, and Hi 5 G for any i ∈ I. Let H ≡ ⋂i∈I Hi. To see
H 5 G, notice that:
• 1 ∈ Hi for all i ∈ I; therefore, 1 ∈ H;• x ∈ H =⇒ x−1 ∈ Hi ∀i ∈ I =⇒ x−1 ∈ H;• x, y ∈ H =⇒ x, y ∈ Hi ∀i ∈ I =⇒ xy ∈ Hi ∀i ∈ I =⇒ xy ∈ H.
Exercise 15 (1.3.4). Let A, B 5 G. First suppose A ∪ B 5 G, A 6⊆ B and B 6⊆ A. Thenwe can find some x ∈ A such that x /∈ B, and some y ∈ B such that y /∈ A. In this case,x, y ∈ A ∪ B =⇒ xy ∈ A ∪ B =⇒ xy ∈ A or xy ∈ B. Without loss of generality, supposexy ∈ A. Since A 5 G, we must have x−1 · xy = y ∈ A. A contradiction. The inversedirection is straightforward.
Exercise 16 (1.3.5). Let ∅ 6= {Di}i∈I ⊆ 2G, Di 5 G for any i ∈ I, and {Di}i∈I is a family ofdirected sets. Let D ≡ ⋃i∈I Di. To prove D 5 G, we need only to prove x, y ∈ D =⇒ xy ∈D. Notice that x, y ∈ D implies that there exist i, j ∈ I such that x ∈ Di and y ∈ Dj. Since{Di} is a family of directed sets, there exists Dk ∈ {Di}i∈I such that Di, Dj ⊆ Dk. Thenx, y ∈ Dk 5 G =⇒ xy ∈ Dk =⇒ xy ∈ D.
Exercise 17 (1.3.12). Consider any H < G [H 5 G and H 6= G]. Pick any x ∈ G \ H andconsider H ∪ {x}. If there is no such a x so that H ∪ {x} < G, we are done; otherwise,consider H ∪
{x, y}
, where y ∈ G \ (H ∪ {x}). If there is no such a y so that H ∪{
x, y}
,
we are done; otherwise, consider H ∪{
x, y, z}
, where z ∈ G \(
H ∪{
x, y})
. . . Since G is
finite, there are at most∣∣G \ H
∣∣− 1 steps.

4. HOMOMORPHISMS 5
4. Homomorphisms
Exercise 18 (p. 20. Here we prove a more general result.). Let K be a field. Then the setAut K of automorphims of K forms a group under composition of mappings.
PROOF.(1) Composition of mappings is always associative, since, for all x ∈ K and all α, β, γ ∈
Aut K, [(α ◦ β
)◦ γ](x) =
(α ◦ β
) [γ (x)
]= α
(β(γ (x)
)),[
α ◦(
β ◦ γ)]
(x) = α([
β ◦ γ](x))
= α(
β(γ (x)
)).
(2) There exists an identity automorphism Id ∈ Aut K, defined by the property that
Id (x) = x, ∀ x ∈ K,
and clearly Id ◦α = α ◦ Id = α for all α ∈ Aut K.(3) Finally, for every automorphism α ∈ Aut K, there is an inverse mapping α−1
defined by the property that
α−1 (x) = the unique z ∈ K such that α (z) = x.
This map is also an automorphism. To see this, let x, y ∈ K, and let α−1 (x) = z,α−1 (y) = t; then
α (z) = x, α (t) = y, and so α (z + t) = x + y.
Hence,
α−1 (x) + α−1 (y) = z + t
= α−1 [α (z + t)]
= α−1 (x + y)
,
and we can show similarly that(α−1 (x)
) (α−1 (y)) = α−1 (xy
).
Thus, α−1 ∈ Aut K, and has the property that
α ◦ α−1 = α−1 ◦ α = Id .
�
Exercise 19 (1.4.1). Let ϕ : A→ B be a homomorphism.
ϕ (1) = ϕ (1 · 1) = ϕ (1) · ϕ (1) =⇒ ϕ (1) = 1 ∈ B.
ϕ (x) · ϕ(
x−1)
= ϕ(
x · x−1)
= ϕ (1) = 1 =⇒(
ϕ (x))−1 = ϕ
(x−1)
.
ϕ (xn) = ϕ(
x · xn−1)
= ϕ (x) · ϕ(
xn−1)
=(
ϕ (x))n

6 1. GROUPS
by induction.
Exercise 20 (1.4.2). Note that ϕ (H) ={
b ∈ B : ∃ a ∈ A such that b = ϕ (a)}
. Since H 5G, we have:
• 1 ∈ H =⇒ ϕ (1) = 1 ∈ ϕ (H);• ϕ (x) ∈ ϕ (H) =⇒ ϕ
(x−1)
=(
ϕ (x))−1 ∈ ϕ (H);
• ϕ (x) , ϕ(y)∈ ϕ (H) =⇒ ϕ (x) · ϕ
(y)
= ϕ(xy)∈ ϕ (H).
Exercise 21 (1.4.3). Note that ϕ−1 (H) ={
a ∈ A : ϕ (a) ∈ H}
, where H 5 G.• ϕ (1) = 1 ∈ H =⇒ 1 ∈ ϕ−1 (H);• x ∈ ϕ−1 (H) =⇒ ϕ (x) ∈ H =⇒
(ϕ (x)
)−1 = ϕ(
x−1)∈ H =⇒ x−1 ∈ ϕ−1 (H);
• x, y ∈ ϕ−1 (H) =⇒ ϕ (x) , ϕ(y)∈ H =⇒ ϕ (x) · ϕ
(y)
= ϕ(xy)∈ H =⇒ xy ∈
ϕ−1 (H).
Exercise 22 (1.4.4). Let N 5 G, and we have(i) xN = Nx for all x ∈ G;
(ii) NxNy ⊆ Nxy for all x, y ∈ G;(iii) xNx−1 ⊆ N for all x ∈ G.(i) =⇒ (ii): NxNy = NxyN = N
(xy)
N = NNxy = Nxy, where the last equalityfollows Grillet (2007, Proposition 3.10).
(ii) =⇒ (iii): Let y = x−1 in (ii). Then NxNx−1 ⊆ N. This part holds since xNx−1 ⊆NxNx−1.
(iii) =⇒ (i): xNx−1 ⊆ N =⇒ xN ⊆ Nx. For the inverse direction, note that we canrewrite (iii) as x−1Nx ⊆ N. Then Nx ⊆ xN.
Exercise 23 (1.4.5). Let ϕ : A → B be a homomorphism of groups, and N C B. We haveshown in Exercise 21 that ϕ−1 (N) 5 A. To prove ϕ−1 (N) C A, we use the outcomes inExercise 22: we need only to prove that xϕ−1 (N) x−1 ⊆ ϕ−1 (N) for all x ∈ A.
y ∈ xϕ−1 (N) x−1 =⇒ ϕ(y)∈ ϕ (x) N
(ϕ (x)
)−1 = N
=⇒ y ∈ ϕ−1 (N) .
Exercise 24 (1.4.6). Let ϕ : A → B be a surjective homomorphism of groups, and N C A.According to Exercise 20, ϕ (N) 5 B. Since ϕ is surjective, for any b ∈ B there existsa ∈ A such that ϕ (a) = b. Since N C A, we have aN = Na =⇒ ϕ (aN) = ϕ (Na) =⇒ϕ (a) · ϕ (N) = ϕ (N) · ϕ (a) =⇒ bϕ (N) = ϕ (N) b =⇒ ϕ (N) C B.
Exercise 25 (1.4.9). Let {Ni}i∈I ⊆ 2G, and Ni C G for any i ∈ I. Define N =⋂
i∈I Ni. Wehave known that N 5 G by Exercise 14. Pick any x ∈ G and notice that xN ⊆ xNi = Nixfor any Ni; hence, xN ⊆ ⋂i∈I (Nix). It is easy to see that
⋂i∈I (Nix) = (
⋂i∈I Ni) x:
y ∈⋂i∈I
(Nix) ⇐⇒ ∃ z ∈ Ni for any i such that y = zx ⇐⇒ y ∈
⋂i∈I
Ni
x,

5. THE ISOMORPHISM THEOREMS 7
where the first ⇐⇒ holds since the solution of zx = y is unique in a group. This provesthat xN ⊆ Nx. The other direction can be proved in the similarly way.
Exercise 26 (1.4.10). Let ∅ 6= {Di} ⊆ 2G be a directed family of normal subgroups. DefineD =
⋃i∈I Di. We know that D 5 G by Exercise 16. To prove D C G, we need only to prove
DxDy ⊆ Dxy for any x, y ∈ G by Exercise 22. This is the case because z ∈ DxDy =⇒∃ Di and Dj such that y ∈ DixDjy =⇒ ∃ Dk such that y ∈ DkxDk = xDkDky = xDky =Dkxy ⊆ Dxy.
Exercise 27 (1.4.12). Let G = 〈X〉, and ϕ, ψ : G → H are homomorphisms agreeing onX. Pick any x ∈ G \ X. The result follows the fact that x = ∏ yi, where yi = xi ∈ X oryi = x−1
i , and ϕ(
x−1i
)=(
ϕ (xi))−1 =
(ψ (xi)
)−1 = ψ(
x−1i
).
5. The Isomorphism Theorems
Exercise 28 (Reproof and Extensions of the Factorization Theorem). Any homomorphismϕ whose kernel Ker ϕ contains N E G can be factored through G/N. In other words, thereis a unique homomorphism ψ : G/N → H such that ψ ◦ π = ϕ. Furthermore:
(1) ψ is an epimorphism if and only if ϕ is an epimorphism;(2) ψ is a monomorphism if and only if Ker ϕ = N;(3) ψ is an isomorphism if and only if ϕ is an epimorphism and Ker ϕ = N.
Gπ //
ϕ""EE
EEEE
EEE G/N
ψ
��H
PROOF. If the diagram is to commute, then ψ (aN) = ϕ (a), and it follows that ψ, ifit exists, is unique. The definition of ψ that we have just given makes sense, because ifaN = bN, then a−1b ∈ N ⊆ Ker ϕ, so ϕ
(a−1b
)= 1H, and therefore ϕ (a) = ϕ (b). Since
ψ (aNbN) = ψ (abN)= ϕ (ab)= ϕ (a) ϕ (b)= ψ (aN) · ψ (bN) ,
ψ is a homomorphism. By construction, ψ has the same image as ϕ, proving (1).Now the kernel of ψ is
Ker ψ ={
aN∣∣ ϕ (a) = 1H
}={
aN∣∣ a ∈ Ker ϕ
}=(Ker ϕ
)/N.

8 1. GROUPS
A homomorphism is injective, i.e., a monomorphism, if and only if its kernel is trivial(consists only of the identity).1 Thus ψ is a monomorphism if and only if
(Ker ϕ
)/N = N.
This means thata ∈ Ker ϕ =⇒ aN = N =⇒ a ∈ N.
Thus, ψ is a monomorphism if and only if Ker ϕ = N, proving (2).Finally, (3) follows immediately from (1) and (2). �
Exercise 29. If H 5 G and K 5 G, then HK 5 G if and only if HK = KH. In this case, HKis the subgroup generated by H ∪ K.
PROOF. If HK 5 G, then (HK)−1, the collection of all inverses of elements of HK,must coincide with HK. But
(HK)−1 = K−1H−1 = KH.
Conversely, if HK = KH, then the inverse of an element in HK also belongs to HK, be-cause
(HK)−1 = K−1H−1 = KH = HK.The product of two elements in HK belongs to HK, because
(HK) (HK) = HKHK = HHKK = HK.
The last statement follows from the observation that any subgroup containing H and Kmust contain HK. �
Exercise 30. Let H 5 G and N E G. Then:(1) HN = NH, and therefore, by Exercise 29, HN 5 G.(2) N E HN.(3) H ∩ N E H.
PROOF.(1) We have hN = Nh for every h ∈ G, in particular for every h ∈ H.(2) Since N E G, it must be normal in the subgroup HN.(3) H ∩ N is the kernel of the canonical map π : G → G/N, restricted to H.
HN
H
;;wwwwwwwwwN
EccGGGGGGGGG
H ∩ NE
ccGGGGGGGGG
;;wwwwwwwww
1If f is injective and a ∈ Ker f , then f (a) = 1 = f (1), hence a = 1. Conversely, if Ker f = {1} andf (a) = f (b), then
f(
ab−1)
= f (a) f(
b−1)
= f (a)[
f (b)]−1 = f (a)
[f (a)
]−1 = 1,
so ab−1 ∈ Ker f . Thus, ab−1 = 1, i.e., a = b, proving f injective.

5. THE ISOMORPHISM THEOREMS 9
�
Exercise 31 (1.5.1). Let ϕ : A → B and ψ : A → C are homomorphisms, and ψ besurjective.
C ddθ
$$IIIIII
IIII
A
ψ
OO
π //
ϕ
��
A/ Ker ψ
σzzuuu
uuuuuu
u
BSuppose Ker ψ ⊆ Ker ϕ. We want to show that there exists a homomorphism ρ :
C → B unique such that ϕ = ρ ◦ ψ. Since Ker ψ ⊆ Ker ϕ, we know from the FactorizationTheorem that there exist a canonical projection π : x 7→ x · Ker ψ for all x ∈ A and ahomomorphism σ : x ·Ker ψ 7→ ϕ (x) such that
ψ = σ ◦ π.
Further, by the Homomorphism Theorem, A/ Ker ψ ∼= Im ψ = C [since ψ is surjective], thatis, there is a bijection θ : C → A/ Ker ψ. It can be seen that
(σ ◦ θ) ◦ ψ ≡ ρ ◦ ψ
satisfies the requirement.
CHAPTER 2
Structure of Groups
11


CHAPTER 3
Rings
1. Rings
Exercise 32 (3.1.1). Let x, y ∈ R. Consider (1 + 1)(x + y
):
(1 + 1)(x + y
)= 1
(x + y
)+ 1
(x + y
)= 1x + 1y + 1x + 1y = x + y + x + y
and
(1 + 1)(x + y
)= (1 + 1) x + (1 + 1) y = 1x + 1x + 1y + 1y = x + x + y + y.
Since (R, +) is a group, this implies
x +(y + x
)+ y = x +
(x + y
)+ y =⇒ y + x = x + y,
i.e., that R under addition is necessarily commutative.
Exercise 33 (3.1.2). Suppose A is an additive abelian group. Let η, ζ, θ ∈ End (A) [η, ζ, θ :A→ A are homomorphisms] satisfy
(η + ζ
)(x) = η (x) + ζ (x) and
(ηζ)(x) = η
(ζ (x)
).
Let o : x 7→ 0 for all x ∈ A. We first verify that(End (A) , +
)is an abelian group:
•(η + ζ
)(x) = η (x) + ζ (x) = ζ (x) + η (x) =
(ζ + η
)(x) =⇒
(End (A) , +
)is
abelian;•(η + ζ
)(x) + θ (x) =
(η (x) + ζ (x)
)+ θ (x) = η (x) +
(ζ (x) + θ (x)
)= η (x) +
(ζ + θ) (x) =⇒(End (A) , +
)is associative;
• o : x 7→ 0 is the additive identity element;• For any η ∈ End (A), −η is the additive inverse element.
To see(End (A) , ·
)is associative, notice that
(η ◦ ζ
)◦ θ = η ◦ (ζ ◦ θ).
Finally, η (ζ + θ) (x) = η(ζ (x) + θ (x)
)= η
(ζ (x)
)+ η
(θ (x)
)=(ηζ + ηθ
)(x), and
(ζ + θ) η = ζη + θη can be proved in the same way.Also note that Id : x 7→ x for all x ∈ A is the multiplicative identity element.
Exercise 34 (3.1.3). Let u is a unit of R, and v ∈ R satisfies uv = vu = 1. Suppose v′ alsosatisfies uv′ = v′u = 1, then
v′ = 1v′ = (vu) v′ = v(uv′)
= v1 = v,
that is, v is unique.Let
R× ≡{
u ∈ R | u is a unit of R}
={
u ∈ R | ∃ v ∈ R such that uv = vu = 1}
.
13

14 3. RINGS
To see(
R×, ·)
is a group, we first prove that · : R× × R× → R× is well defined. Foru1, u2 ∈ R×, let v1, v2 ∈ R satisfy uivi = viui = 1, where i = 1, 2. Then
(u1u2) (v2v1) = u1 (u2v2) v1 = u1v1 = 1 =⇒ u1u2 ∈ R×.
It is easy to see that “·” is associative since R is and R× ⊆ R, and every u ∈ R× has itsinverse element v such that uv = vu = 1. Further, 1 is also the identity element of R×[note that 1 ∈ R×].
Exercise 35 (3.1.4). Let R be a ring with identity. Let u ∈ R×. Then there exists x = y = vsuch that uv = vu = 1. Conversely, suppose there exist x, y ∈ R such that xu = uy = 1.To prove u ∈ R×, it suffices to show that x = y:
xu = 1 =⇒ (xu) y = y =⇒ x(uy)
= y =⇒ x = y.
Exercise 36 (3.1.5). Notice that
Z/nZ ={
nZ, 1 + nZ, . . . , (n− 1) + nZ}≡{
0, 1, . . . , n− 1}
.
Let x, y ∈ Z/nZ. Then
x · y = (x + nZ)(y + nZ
)= xy + nZ.
Hence, x · y = 1 ⇐⇒ xy− 1 ∈ nZ, that is,
xy = 1 + nm,
for some m ∈ Z, that is, xy−mn = 1: x and n are relatively prime.
Exercise 37 (3.1.7). Let a + bi, c + di be Gauss integers. Then
(a + bi) + (c + di) = (a + c) + (b + d) i
is a Gauss integer, and
(a + bi) (c + di) = (ac− bd) + (ad + bc) i
is a Gauss integer, too. All the other properties of a ring are satisfied. The unit of a + bi 6=(0, 0) is
(4)a
a2 + b2 −b
a2 + b2 i.
Exercise 38 (3.1.8). Let
C ≡{
a + ib√
2∣∣∣ a, b ∈ Z
}.
Pice any a + ib√
2, c + id√
2 ∈ C. Then(a + ib
√2)
+(
c + id√
2)
= (a + c) + i (b + d)√
2 ∈ C,
and (a + ib
√2) (
c + id√
2)
= (ac− 2bd) + i (ad + bc)√
2 ∈ C.

2. SUBRINGS AND IDEALS 15
Hence, addition and multiplication are well defined on C. All the other properties of aring are satisfied. The unit of a + ib
√2 6= (0, 0) can be derived as in (4).
Exercise 39 (3.1.11). Let R be a ring, and R1 ≡ R×Z. We first show that(
R1, +)
is anabelian group.
• (x, m) +(y, n)
=(x + y, m + n
)=(y + x, n + m
)=(y, n)+ (x, m) =⇒
(R1, +
)is abelian;• Associativity is easy to see;• (0, 0) is the additive identity element;• For any (x, m), its additive inverse element is (−x,−m).
We then show(
R1, ·)
is a semigroup. Let (x, m) ,(y, n)
,(z, p)∈ R1. Then(
(x, m)(y, n)) (
z, p)
=(
xy + nx + my, mn) (
z, p)
=((
xy + nx + my, mn)
z + p(xy + nx + my, mn
)+ mnz, mnp
)=(
x(yz + py + nz
)+ npx + m
(yz + py + nz
), mnp
)= (x, m)
((y, n) (
z, p))
.
Finally,
(x, m)[(
y, n)+(z, p)]
= (x, m)(y + z, n + p
)=(
x(y + z
)+(n + p
)x + m
(y + z
), m(n + p
))= (x, m)
(y, n)+ (x, m)
(z, p)
,
and the other direction can be proved in the same way.
Exercise 40 (3.1.12). Take (a, m) , (x, n) ∈ R1. Suppose R1 is regular, then
(a, m) (x, n) (a, m) = (a, m) ,
that is, mnm = m ⇐⇒ mn = 1 ⇐⇒ n = 1/m. It is easy to see that there exists m ∈ Z
such that mnm 6= m for any n ∈ Z.
2. Subrings and Ideals
Exercise 41 (3.2.1). Let {Si}i∈I ⊆ 2R be a family of subrings of a ring R. To see S =⋂
i∈I Siis a subring, we need only to prove:
(1) x, y ∈ S =⇒ x − y ∈ S. Notice that x, y ∈ S =⇒ x, y ∈ Si, ∀ i ∈ I =⇒ x − y ∈Si, ∀ i ∈ I =⇒ x− y ∈ S; and
(2) x, y ∈ S =⇒ xy ∈ S. This can be proved as in the previous part.

16 3. RINGS
Exercise 42 (3.2.2). Let ∅ 6= {Si}i∈I ⊆ 2R is a nonempty directed family of subrings ofring R. Define S ≡ ⋃i∈I Si. It suffices to show that
x, y ∈ S =⇒ x− y ∈ S and xy ∈ S.
Notice thatx, y ∈ S =⇒ ∃ i, j ∈ I such that x ∈ Si, y ∈ Sj
=⇒ ∃ k ∈ I such that x, y ∈ Sk
=⇒ x− y ∈ Sk =⇒ x− y ∈ S.
With the same way, we can show that x, y ∈ S =⇒ xy ∈ S.
Exercise 43 (3.2.3). Denote S the set of all sums of products of elements of X ⊆ R andopposities of such products. A subring that contains X must also contain all productsof elements of X [closed under multiplication], their opposities [closed under additiveinverse], and their sums [closed under addition].
We thus only need to show that S is a subring of R. If x ∈ S, then −x ∈ S; hence, 0 =x− x ∈ S. The association and commutativity of + is straightforward to see. This provesthat (S, +) 5 (R, +). Now let x, y ∈ S. Then x and y are sums of products of elements ofX and opposities, and xy is also such sums by the distributivity of multiplication. Finally,1 is the empty product [since 1 ∈ R], so 1 ∈ S. This proves that S is the smallest subringcontaining X.
Exercise 44 (3.2.4). Let {Ai}i∈I is a family of ideals of a ring R. Denote A ≡ ⋂i∈I Ai. It
suffices to show that
a, b ∈ A =⇒ a− b ∈ A, a ∈ A and r ∈ R =⇒ ra ∈ A and ar ∈ A.
Firstly,
a, b ∈ A =⇒ a, b ∈ Ai, ∀ i ∈ I=⇒ a− b ∈ Ai, ∀ i ∈ I=⇒ a− b ∈ A.
Similarly, we can prove the other requirements.
Exercise 45 (3.2.5). Simple. Omitted.
Exercise 46 (3.2.6). Let I, J are two ideals of a ring R. The “⇐=” direction is straightfor-ward. Now suppose I ∪ J is a ideal of R. Then
I ∪ J = I + J ={
i + j∣∣ i ∈ I, j ∈ J
}.
Suppose I 6⊆ J and J 6⊆ I. In this case, we can find i ∈ I \ J, j ∈ J \ I, and i + j ∈ I ∪ J.Without loss of generality, assume that i + j ∈ I. Since I is an ideal, (I, +) 5 (R, +), andi ∈ I =⇒ −i ∈ I; hence, j =
(i + j
)− i ∈ I. A contradiction.

2. SUBRINGS AND IDEALS 17
Exercise 47 (3.2.7). Given R is a commutative ring, let N ⊆ R such that N consists of allnilpotent elements of R. Clearly 01 = 0 =⇒ 0 ∈ N =⇒ N 6= ∅. Given a, b ∈ N, by thedefinition of N,
am = 0 and bn = 0fro some positive integers m and n. Given ab = ba the binomial theorem applies:
(a + b)mn = amn +mn−1
∑k=1
(mnk
)akbmn−k + bmn.
If m = n = 1 then a = b = 0 =⇒ a + b = 0. Without loss of generality suppose m > 1.Whenever k < m, nk < mn, so (n− 1) k < mn− k. With k > 1, (n− 1) k ≥ n and whenk = 1, mn− k ≥ n, so in general n ≤ mn− k. So
bmn−k = bnbmn−k−n = 0bmn−k−n = 0,
and whenever k ≥ m, ak = amak−m = 0ak−m = 0. Cancelling appropriately the binomialexpansion reduces to:
(a + b)mn = (am)n +m−1
∑k=1
ak0 +mn−1
∑k=m
0bmn−k + (bn)m
= 0 + 0 + 0 + 0= 0,
leaving N closed to sums.Again using the commutative multiplication observe 0 = 0 · 0 = (am)n · (bn)m =
(ab)mn. So ab ∈ N. To close N to negative notice, when n is even (−a)n = (an) = 0, andwhen n is odd, (−a)n = − (an) = 0, leaving −a ∈ N. Therefore N is a subring of R.
Finally given any x, y ∈ R, R is commutative so(xay)n = xnanyn = xn0yn = 0. So
xay ∈ N, proving N is an ideal of R.
Exercise 48 (3.2.8). Let n > 0. Suppose nZ is a maximal ideal of Z. Then n 6= 1; otherwise1Z = Z. If n is not prime, then let n = pq with 1 < p, q < n. In this case, say, pZ ( Z and
nZ ( pZ.
This is because
x ∈ nZ =⇒ ∃ m ∈ Z such that x = nm =(
pq)·m = p ·
(qm)∈ pZ,
that is, nZ ⊆ pZ; furthermore, for example, p /∈ nZ, that is, nZ ( pZ. This contradictsthe assumption that nZ is a maximal ideal of Z.
For the inverse direction, let n is a prime, and suppose there exists an ideal pZ suchthat nZ ( pZ. Then p < n and p = nm for some m ∈ Z. Since p is a prime, we concludethat n = 1 and so pZ = Z. This proves that nZ is a maximal ideal of Z if n is a prime.
Exercise 49 (3.2.10). Let A and B be ideals of a ring R. By definition (Grillet, 2007, p. 112),
AB ≡({
aibj
∣∣∣ ai ∈ A, bj ∈ B
}).

18 3. RINGS
Then, according to Grillet (2007, Proposition 2.2, P. 110), AB is the set of all finite sums ofelements of the form
x(
aibj
)y, with x, y ∈ R, ai ∈ A, and bj ∈ B.
Notice that
x(
aibj
)y = (xai)
(ybj
)= a′ib
′j,
where a′i ∈ A and b′j ∈ B since A and B are ideals of R.
3. Homomorphisms
Exercise 50 (The Operations on R/I). Let R be a ring, and let I be an ideal of R. We showthat, for all a, b ∈ R,
(5) a + I = b + I ⇐⇒ a− b ∈ I,
(6) (a + I) + (b + I) = (a + b) + I,
and
(7) (a + I) (b + I) ⊆ ab + I.
PROOF. To prove (5), suppose that a + I = b + I. Then, in particular,
a = a + 0 ∈ a + I = b + I,
and so there exists x ∈ I such that a = b + x. Thus,
a− b = x ∈ I.
Conversely, suppose that a− b ∈ I. Then, for all x ∈ I, we have that
a + x = b +[(a− b) + x
]≡ b + y,
where y = (a− b) + x ∈ I. That is, for any a + x ∈ a + I, there exists y ∈ I such thata + x = b + y ∈ b + I. Thus, a + I ⊆ b + I, and the reverse inclusion is proved in the sameway.
To prove (6), let x, y ∈ I and let
u = (a + x) + (b + x) ∈ (a + I) + (b + I) .
Then u = (a + b) +(x + y
)∈ (a + b) + I. Conversely, if z ∈ I and v = (a + b) + z ∈
(a + b) + I, then v = (a + z) + (b + 0) ∈ (a + I) + (b + I).To prove (7), let x, y ∈ I and let u = (a + x)
(b + y
)∈ (a + I) (b + I). Then
u = ab +(ay + xb + xy
)∈ ab + I.
�

3. HOMOMORPHISMS 19
Exercise 51 (3.3.1). Let ϕ (a) , ϕ (b) be arbitrary elements of ϕ (A), with a, b ∈ R. Then
ϕ (a) ϕ (b) = ϕ (ab) ∈ ϕ (A)
and, by virtue of ϕ (−r) = −ϕ (r),
ϕ (a)− ϕ (b) = ϕ (a) + ϕ (−b) = ϕ(a + (−b)
)∈ ϕ (A) .
Thus, ϕ (A) is a subring of S.
Exercise 52 (3.3.2). Let ϕ : R → S be a ring homomorphism, and B be a subring of S. Leta, b be arbitrary elements of ϕ−1 (B). Then there exists a′, b′ ∈ B such that
a′ = ϕ (a) and b′ = ϕ (b) .
Hence,a′b′ = ϕ (ab) ∈ B =⇒ ab ∈ ϕ−1 (B) ,
anda′ − b′ = ϕ (a)− ϕ (b) = ϕ (a− b) ∈ B =⇒ a− b ∈ ϕ−1 (B) .
Exercise 53 (3.3.3). Let ϕ : R→ S be a surjective homomorphism of rings, and let I be anideal of R. Let ϕ (a) , ϕ (b) ∈ ϕ (I). Then
ϕ (a)− ϕ (b) = ϕ (a− b) ∈ ϕ (I) .
Now let ϕ (a) ∈ ϕ (I) and s ∈ S. Then there exists b ∈ R such that s = ϕ (b) since ϕ issurjective, and so
r · ϕ (a) = ϕ (ba) ∈ ϕ (I) .
Exercise 54 (3.3.6). Let π : x 7→ x + I be the canonical projection from R to R/I. Let B bean ideal of R/I. Then
A = π−1 (B) ={
a ∈ R | a + I ∈ B}
is an ideal of R. Notice that the additive identity of R/I is 0 + I = I, and every ideal ofR/I includes the additive identity I. Therefore, A contains
π−1 (I) = Ker π = I.
Now, I ⊆ A and A is an ideal of R. We then show that A/I = B. By definition A, we haveA/I ⊆ B. To see the inverse inclusion, notice that
x + I ∈ B =⇒ x ∈ A =⇒ x + I ∈ A/I.
To see the uniqueness of A, assue that B = C/I, where I ⊆ C and C is an ideal of R. Ifc ∈ C, then c + I ∈ C/I = B and c ∈ A. Conversely, if a ∈ A, then a + I ∈ B = C/I, soa + I = c + I for some c ∈ C. Because
a + I = c + I ⇐⇒ a− c ∈ I,
we have a = (a− c) + c ∈ c + I ⊆ C. [This is because C is an ideal and I ⊆ C]

20 3. RINGS
Exercise 55 (3.3.8). Let C ⊆ B be ideals of a ring R. By the Factorization Theorem, ρfactors through π: ρ = σ ◦ π for some homomorphism σ : R/C → R/B; namely, σ :r + C 7→ r + B. Like ρ, σ is surjective. We show that Ker σ = B/C.
Rπ //
ρ
��
R/C
τ��
σ
wwoooooooooooo
R/Bθ
// (R/C) / (B/C)
4. Domains and Fields
Exercise 56. Every finite domain is a field.
PROOF. Suppose D = {d1, d2, . . . , dn} is a finite domain, and let a = di for some i bea non-zero element of D. The cancellation property [Proposition 4.2] has the consequencethat the elements ad1, ad2, . . . , adn are all distinct, and so constitute a list of all the elementsof D. Hence there mut be some dj ∈ D with the property that adj = 1. Thus D is afield. �
Exercise 57 (Proposition 4.1). Let n be a positive integer. The ring Zn is a field if and onlyif n is prime.
PROOF. Suppose first that n is not prime. Then n = rs, where 1 < r, s < n. Thenr + nZ 6= 0 + nZ and s + nZ 6= 0 + nZ, but
(r + nZ) (s + nZ) = n + nZ = 0 + nZ.
Thus, Zn contains zero-divisors, and so is not a domain, and is not a field.Now let p be a prime, and suppose that(
r + pZ) (
s + pZ)
= 0 + pZ.
Then p|rs, and so (since p is prime) either p|r or p|s. That is, either r + pZ = 0 + pZ ors + pZ = 0 + pZ. Thus, Zp is a domain. By Exercise 56, Zp is a field since Zp is finite:
Zp ={
pZ, 1 + pZ, . . . ,(
p− 1)+ pZ
}.
�
Exercise 58 (3.4.1). (Based on Hungerford, 1974, Theorem 2.16, p. 127) Let a be an ideal ofa communatative ring R with identity 1R 6= 0. Note that R/a is a commutative ring withidentity 1R + a and zero element 0 + a = a.
If a is prime, then 1R + a 6= a since a 6= R (by definition). This is because 1R + a =
a〈1〉
=⇒ 1R ∈ a =⇒ a = R, where 〈1〉 holds since a 5 (R, +). Furthermore, R/a has no zero

4. DOMAINS AND FIELDS 21
divisors since(a + a) (b + a) = 0 + a =⇒ ab + a = a
=⇒ ab ∈ a
=⇒ a ∈ a or b ∈ a
=⇒ a + a = a or b + a = a.
Therefore, R/a is a domain.Conversely, if R/a is a domain, then 1R + a 6= 0 + a = a, whence 1R /∈ a. Therefore,
a 6= R. Since R/a has no zero divisors,ab ∈ a =⇒ ab + a = a
=⇒ (a + a) (b + a) = a
=⇒ a + a = a or b + a = a
=⇒ a ∈ a or b ∈ a.
Therefore, a is prime by definition.
Exercise 59 (3.4.2). For the (⇐=) direction, suppose n > 0 is not prime. Then either n = 1,in which case nZ = Z is not prime (by definition, it requires that nZ 6= Z), or n = xy forsome 1 < x, y < n, in which case, xy ∈ nZ, but x /∈ nZ and y /∈ nZ.
For the (=⇒) direction, suppose n is prime, then nZ in Z is prime since
ab ∈ nZ =⇒ n | ab
=⇒ n | a or n | b=⇒ a ∈ nZ or b ∈ nZ.
Exercise 60 (3.4.3). Let M is a maximal ideal of a commutative ring R. Suppose thatab ∈M but a /∈M and b /∈M. Then
M + (a) and M + (b)
are ideals (Grillet, 2007, Proposition 2.7, p. 111), and properly contain M. By maximalityM + (a) = R = M. Since R is commutative and ab ∈M, we have
(a) (b) ⊆ (ab) ⊆M.
Therefore,R = RR
=[M + (a)
] [M + (b)
]⊆MM + (a) M + M (b) + (a) (b)⊆M.
This contradicts the fact that M 6= R (since M is maximal). Therefore, a ∈ M or b ∈ M,whence M is prime.
Exercise 61 (3.4.4). Let R be a domain. We show that Q (R) is the smallest field containingR, in the following sense:

22 3. RINGS
Let ι : R ↪→ Q (R) with ι (x) = x1 , and let F be a field with the property
that there is a monomorphism ϕ : R ↪→ F. Then there exists a monomor-phism ψ : Q (R)→ K such that the diagram
Rι //
ϕ""EEEEEEEEE Q (R)
ψ
��F
commutes.
Define a mapping ψ : Q (R)→ F by the rule that
(8) ψ
(xy
)=
ϕ (x)ϕ(y) .
(Note that y 6= 0 =⇒ ϕ(y)6= 0 since ϕ is a monomorphism.) This is well-defined and
injective, since
ab
=cd⇐⇒ ad = bc
⇐⇒ ϕ (a) ϕ (d) = ϕ (b) ϕ (c)
⇐⇒ ϕ (a)ϕ (b)
=ϕ (c)ϕ (d)
,
and it is a homomorphism, since
ψ
(ab
+cd
)= ψ
(ad + bc
bd
)=
ϕ (ad + bc)ϕ (bd)
=ϕ (a) ϕ (d) + ϕ (b) ϕ (c)
ϕ (b) ϕ (d)
=ϕ (a)ϕ (b)
+ϕ (c)ϕ (d)
= ψ
(ab
)+ ψ
(cd
),

5. POLYNOMIALS IN ONE VARIABLE 23
and
ψ
(ab· c
d
)= ψ
(acbd
)=
ϕ (a) ϕ (c)ϕ (b) ϕ (d)
=ϕ (a)ϕ (b)
· ϕ (c)ϕ (d)
= ψ
(ab
)· ψ(
cd
).
The commuting of the diagram is clear, since, for all x ∈ R,(ψ ◦ ι
)(x) = ψ
(x1
)=
ϕ (x)ϕ (1)
= ϕ (x) .
Hence, any field containing R contains (up to isomorphism) the field Q (R).
5. Polynomials in One Variable
Exercise 62 (3.5.1). Howie (2006, Sec. 2.3) provides a wonderful introduction of polyno-mial. Let p, q, r ∈ R [X] with
p = (a0, a1, . . .) , q = (b0, b1, . . .) , and r = (c0, c1, . . .) .
[In each case, only finitely many entries are non-zero.] Then(
p · q)· r = (d0, d1, . . .),
where, for m = 0, 1, 2, . . .
dm = ∑{(k,`)| k+`=m}
∑{(i,j| i+j=k )
} aibj
c`
= ∑{(i,j,`)| i+j+`=m
} aibjc`
= ∑{(i,n)| i+n=m}
ai
∑{(j,`)| j+`=n
} bjc`
,
which is the m-th entry of p ·(q · r
). Thus
(R [X] , ·
)is association.
Exercise 63 (3.5.2). For the (⇐=) direction, suppose b is a unit. Then there exists d ∈ Rsuch that db = 1R. Hence,
bx = c =⇒ dbx = dc =⇒ x = dc,
that is, the equation bx = c has a unique solution. For the (=⇒) direction, considerbx = 1R.

24 3. RINGS
Exercise 64 (3.5.4). Let R be a subring of S, and s ∈ S. Grillet (2007, Proposition 5.6, p.122) has shown that if s commutes with every element of R, then evs : A 7→ A (s) is a ringhomomorphism. To see the inverse direction, let evs (A · B) = evs (A) · evs (B), whereA, B ∈ R [X]. Particularly, let A = X, and B = r. Then
A · B = rX =⇒ evs (A · B) = rs,
and
evs (A) · evs (B) = sr.
This proves that rs = sr, ∀ r ∈ R.
Exercise 65 (3.5.7). Let A, B ∈ R [X], where deg (A) = m and deg (B) = n. It is easy toverify the identity for small values of m + n.1 Suppose that (AB)′ = A′B + AB′ for allA, B ∈ R [X] such that deg (A) + deg (B) < k. Let A = a0 + a1X + · · · + amXm, wherem > 1; let B = b0 + b1X + · · · bnXn, and let m + n = k.
Write A = A1 + A2, where A2 = amXm. Then
(AB)′ = (A1B + A2B)′ = (A1B)′ + (A2B)′ .
Now (A1B)′ = A′1B + A1B′ by the induction hypothesis. Also,
(A2B)′ =(
amb0Xm + amb1Xm+1 + · · ·+ ambnXm+n)′
= am
[mb0Xm−1 + (m + 1) b1Xm + (m + 2) b2Xm+1 + · · ·+ (m + n) bnXm+n−1
]= mamXm−1 (b0 + b1X + · · ·+ bnXn) + amXm
(b1 + 2b2X + · · ·+ nbnXn−1
)= A′2B + A2B′.
Hence,
(AB)′ = (A1B)′ + (A2B)′
=(
A′1B + A1B′)+(
A′2B + A2B′)
=(
A′1 + A′2)
B + (A1 + A2) B′
= A′B + AB′.
Exercise 66 (3.5.8). Let A ∈ R [X] and n > 0. It is clear that(
A1)′
= A′. Suppose(An−1
)′= (n− 1) An−2A′
1For example, suppose that A = a + bX and B = c + dX, then AB = ab + (ad + bc) X + bdX2, so(AB)′ = ad + bc + 2bdX, and A′B + AB′ = b (c + dX) + (a + bX) d = ad + bc + 2bdX = (AB)′.

8. PRINCIPAL IDEAL DOMAINS 25
for any n > 1. Then by the induction hypothesis and Exercise 65,
(An)′ =(
An−1A)′
=(
An−1)′
A + An−1A′
= (n− 1) An−1A′ + An−1A′
= nAn−1A′.
6. Polynomials in Several Variables
7. Formal Power Series
8. Principal Ideal Domains
Exercise 67 (3.8.1). It is enough to prove that: Even if K is a field, K [X, Y] is not a PID.Consider the ideal I =
(X2, Y2
), and suppose that I =
(f)
for some f ∈ R [X, Y].Then
f∣∣∣ X2 and f
∣∣∣ Y2 ,
and so f ∼ 1 [ f is a unit] and(
f)
= K [X, Y]. But I 6= K [X, Y], since, for example, X /∈ I.
Exercise 68 (3.8.3). Let D be a euclidean domain. The ideal (0) = {0} is certainly princi-pal. Let I be a non-zero ideal, and let b ∈ I \ {0} such that
ϕ (b) = min{
ϕ (x)∣∣ x ∈ I \ {0}
}.
[The above equation holds since (N, >) is well-ordered. See, e.g., Hrbacek and Jech(1999).] Let a ∈ I. Then there exist q, r such that
a = qb + r and ϕ (r) < ϕ (b) .
Since r = a− qb ∈ I, we have a contradiction unless r = 0. Thus a = qb, and so I = Db =(b), a principal ideal.


CHAPTER 4
Field Extensions
1. Fields
Exercise 69 (4.1.1). Let K be a field and {Fi}i∈I be a family of subfields of K. DenoteF ≡ ⋂i∈I Fi. It is evident that 0, 1 ∈ F since they belong to each Fi. For any x, y ∈ F,
x, y ∈ F =⇒ x, y ∈ Fi, ∀ i =⇒ x− y ∈ Fi, ∀ i =⇒ x− y ∈ F,
and similarly, we can show that xy ∈ F when y 6= 0.
Exercise 70 (4.1.2). Use the facts that (⋃
Ki, +) and(⋃
Ki \ {0} , ·)
are groups.
2. Extensions
Exercise 71 (4.2.2). We first show that
(9) Q(√
2,√
3)
= Q(√
2 +√
3)
.
It is clear√
2 +√
3 ∈ Q(√
2,√
3)
, and so Q(√
2 +√
3)⊆ Q
(√2,√
3)
. Conversely,
since(√
3−√
2) (√
3 +√
2)
= 1, it follows that
√3−√
2 =(√
2 +√
3)−1∈ Q
(√2 +√
3)
,
and it then follows easily that√
2,√
3 ∈ Q(√
2 +√
3)
. For example,
√3−√
2,√
3 +√
2 ∈ Q(√
2 +√
3)
=⇒ 2√
3 =(√
3−√
2)
+(√
3 +√
2)∈ Q
(√2 +√
3)
=⇒√
3 = 2−1 × 2√
3 ∈ Q(√
2 +√
3)
.
Hence, Q(√
2,√
3)⊆ Q
(√2 +√
3)
. We thus proved (9).
We can write Q(√
2,√
3)
as(
Q[√
2]) [√
3]. The set
{1,√
2}
is clearly a basis for
Q[√
2]
over Q since
Q[√
2]
={
a + b√
2∣∣∣ a, b ∈ Q
}.
27

28 4. FIELD EXTENSIONS
Since√
3 /∈ Q[√
2], we must have[
Q(√
2,√
3)
: Q[√
2]]≥ 2.
On the other hand, from the trivial observation that(√
3)2− 3 = 0, we conclude that
X2 − 3 is the minimum polynomial of√
3 over Q[√
2]
and that{
1,√
3}
is a basis. Then,[(Q[√
2]) [√
3]
: Q
]=
[(Q[√
2]) [√
3]
: Q[√
2]]·[Q√
2 : Q]
= 2× 2= 4.
3. Algebraic Extensions
Exercise 72 (4.3.2). Let K ⊆ E ⊆ F, and let F be algebraic over K. It is easy to see that E isalgebraic over K if F is, so we just show that F is algebraic over E. Pick any α ∈ F. Sinceevery α ∈ F is algebraic over K, there exists a non-zero polynomial f ∈ K [X] such thatf (α) = 0. Since f ∈ E [X], too, we deduce that α is algebraic over E.
Exercise 73 (4.3.3, Tower Property). Let K ⊆ E ⊆ F are fields, E is algebraic over K, andF is algebraic over E. Let α ∈ F. Since α is algebraic over E, we know that α satisfies anequation
a0 + a1α + · · ·+ anαn = 0with ai ∈ E, not all ai = 0. Let E0 ≡ K (a0, . . . , an). Then E0 is finite over K by Grillet (2007,Proposition 3.2, p. 164), and α is algebraic over E0. From the tower
K ⊆ E0 ⊆ E0 (α)
and the fact that each step in this tower is finite, we conclude that E0 (α) is finite over K:[E0 (α) : K
]=[E0 (α) : E0
]· [E0 : K] ,
whence α is algebraic over K, thereby proving that F is algebraic over K (Grillet, 2007,Proposition 4.3.1, p. 164).
4. The Algebraic Closure

CHAPTER 5
Galois Theory
1. Splitting Fields
Exercise 74 (p. 192).(1) Let F be a finite field. Then |F| = pn for some prime p and some integer n ≥ 1.
Every element of F is a root of the polynomial Xpn − X, and F is a splitting fieldof this polynomial over the prime subfield Zp.
(2) Let p be a prime, and let n ≥ 1 be an integer. There exists, up to isomorphism,exactly one field of order pn.
PROOF. (1) Let F have characteristic p. Then F is a finite extension of Zp, of degree n,say. If (δ1, . . . , δn) is a basis of F over Zp, then every element of F is uniquely expressibleas a linear combination
n
∑i=1
aiδi,
with coefficients in Zp. For each coefficient ai there are p choices, namely 0, 1, . . . , p− 1,and so there are pn linear combinations in all. Thus |F| = pn.
The multiplicative group F∗ = F \ {0} is of order pn − 1. Let α ∈ F∗. Then, byLagrange’s theorem [Corollary I.3.14, p.16],
|F∗| = [F∗ : 〈α〉] ·∣∣〈α〉∣∣ ,
we have ∣∣〈α〉∣∣ ∣∣ (pn − 1)
.
Certainly αpn−1 = 1. Thus, αpn − α = 0 and, since we also have 0pn − 0 = 0, we concludethat every element of F is a root of the polynomial Xpn − X.
It follows that the polynomial Xpn − X splits completely over F, since X− α is a linearfactor for each of the pn element α of F. It clearly cannot split completely over any propersubfield of F, and so F must be the splitting field of Xpn − X over Zp.
(2) Let p and n be given, and let L be the splitting field of f = Xpn − X over Zp. Then,since the field is of characteristic p,
f ′ = pnXpn−1 − 1 = −1.
[This is because pnXpn−1 =(
p1F)·(
pn−1Xpn−1)
= 0.] Thus, f and f ′ are certainly co-prime, and so �
29


CHAPTER 6
Fields with Orders and Valuations
1. Ordered Fields
2. Real Fields
Exercise 75 (Proposition VI.2.1). If F is a formally real field and α2 ∈ F, α2 > 0, then F (α)is formally real.
PROOF. Let α2 ∈ F, and α2 > 0. There are two cases: either α ∈ F or α /∈ F. We firstshow that F (α) = F if α ∈ F. This is because f = X − α ∈ F [X], which implies thatf (α) = 0, and so F (α) = F [α] by Grillet (2007, Proposition IV.2.2, p. 161). It is evidentthat F ⊆ F [α], so we need only to show that F [α] ⊆ F. This holds since α2 ∈ F and F is afield. Hence F (α) = F [α] = F is real by assumption.
Now suppose that α /∈ F. We now prove that the minimal polynomial of α is Irr (α : F) =g = X2− α2. Firstly, X2− α2 ∈ F [X] and g (α) = 0; secondly, deg
(g)6= 0 since α2 > 0 =⇒
α 6= 0; finally, deg(
g)6= 1: suppose g = X − b ∈ F [X] is the minimal polynomial of α.
Then g (α) = α− b = 0 =⇒ α = b ∈ F. A contradiction since α /∈ F by assumption.Hence,
[F (α) : F
]= deg
(X2 − α2
)= 2 and {1, α} is a basis of F (α). Then
F (α) = F [α] ={
x + yα∣∣ x, y ∈ F
}.
If F (α) is not real, then there exist xi, yi ∈ F such that
−1 = ∑i
(xi + yiα
)2
= ∑i
(x2
i + y2i α2)
+ α ∑i
(2xiyi
).
If ∑i(2xiyi
)6= 0, then [
∑i
(2xiyi
)]α +
[∑
i
(x2
i + y2i α2)
+ 1
]= 0,
which implies that there exists f ∈ F [X] with deg(
f)
= 1 satisfying f (α) = 0. It contra-dicts the fact that Irr (α : F) = X2 − α2. Therefore, ∑i
(2xiyi
)= 0, and so
−1 = ∑i
(x2
i + y2i α)≥ 0,
31

32 6. FIELDS WITH ORDERS AND VALUATIONS
which is impossible since F is real. �

Bibliography
Grillet, P. A., 2007. Abstract Algebra, 2nd Edition. Vol. 242 of Graduate Texts in Mathe-matics. Springer Science+Business Media, LLC, New York. [6, 17, 18, 21, 24, 28, 31]
Howie, J. M., 2006. Fields and Galois Theory. Springer-Verlag, London. [23]Hrbacek, K., Jech, T., 1999. Introduction to Set Theory, 3rd Edition. Marcel Dekker, Inc.
[25]Hungerford, T. W., 1974. Algebra. Vol. 73 of Graduate Texts in Mathematics. Springer-
Verlag, New York. [20]
33