clasificación de los vectores operaciones con...
TRANSCRIPT
1
Magnitudes vectoriales – Clasificación de los vectores
– Operaciones con vectores
– Funciones vectoriales
2
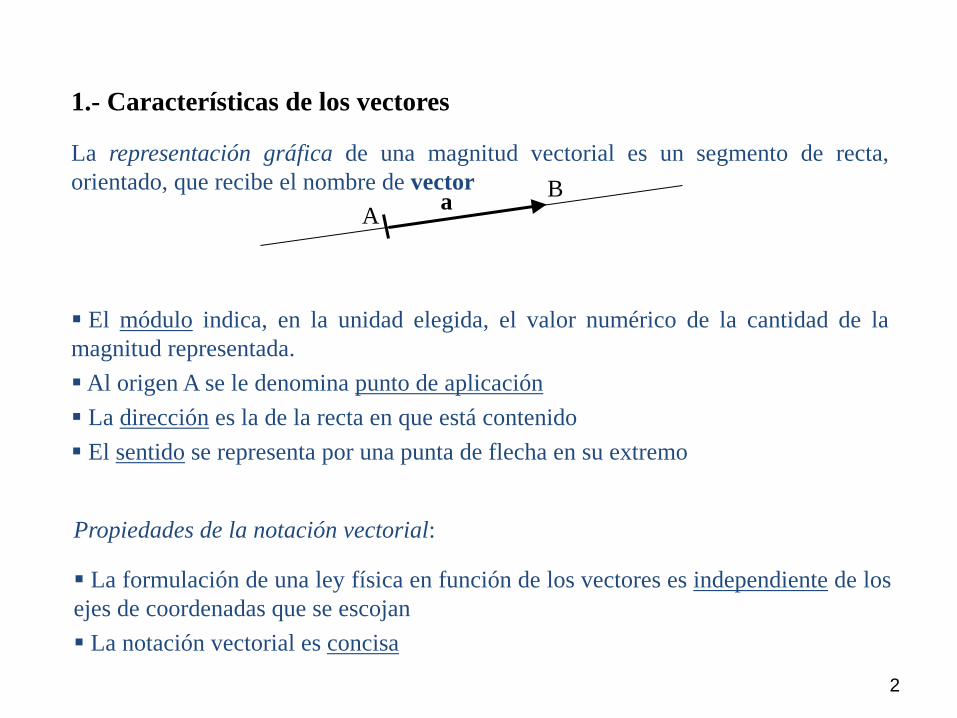
1.- Características de los vectores
La representación gráfica de una magnitud vectorial es un segmento de recta, orientado, que recibe el nombre de vector El módulo indica, en la unidad elegida, el valor numérico de la cantidad de la magnitud representada. Al origen A se le denomina punto de aplicación La dirección es la de la recta en que está contenido El sentido se representa por una punta de flecha en su extremo
A B a
Propiedades de la notación vectorial:
La formulación de una ley física en función de los vectores es independiente de los ejes de coordenadas que se escojan La notación vectorial es concisa
3
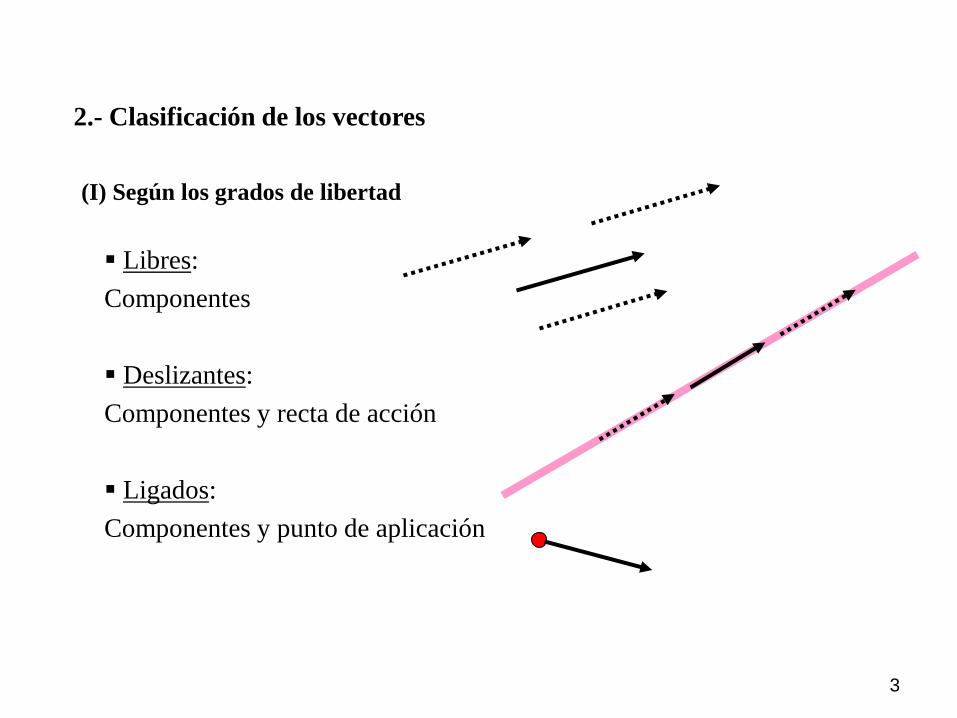
Libres: Componentes Deslizantes: Componentes y recta de acción Ligados: Componentes y punto de aplicación
2.- Clasificación de los vectores
(I) Según los grados de libertad

4
Polares: No presentan ninguna duda para asignarles el sentido en que actúan (fuerza, velocidad, etc.) Axiales: Hay que asignar un sentido por convenio (velocidad angular de una rueda, …) Se adopta un convenio: regla del tornillo o de la mano derecha
Clasificación de los vectores
(II) Según la forma de actuar

5
Vectores libres
1.- Suma v w
s s = v + w
2.- Producto de un escalar por un vector
Versor: vector unitario vv
p = m v
3. Operaciones con vectores
v p = mv
6
k cos γj cos βi cos αvvu
1γcosβcosαcos
;vvcos γ ;
vv
cos β ;vvcos α
vvvv
kvjvivv
v
222
zyx
z2
y2
x2
zyx
++==
=++
===
++=
++=
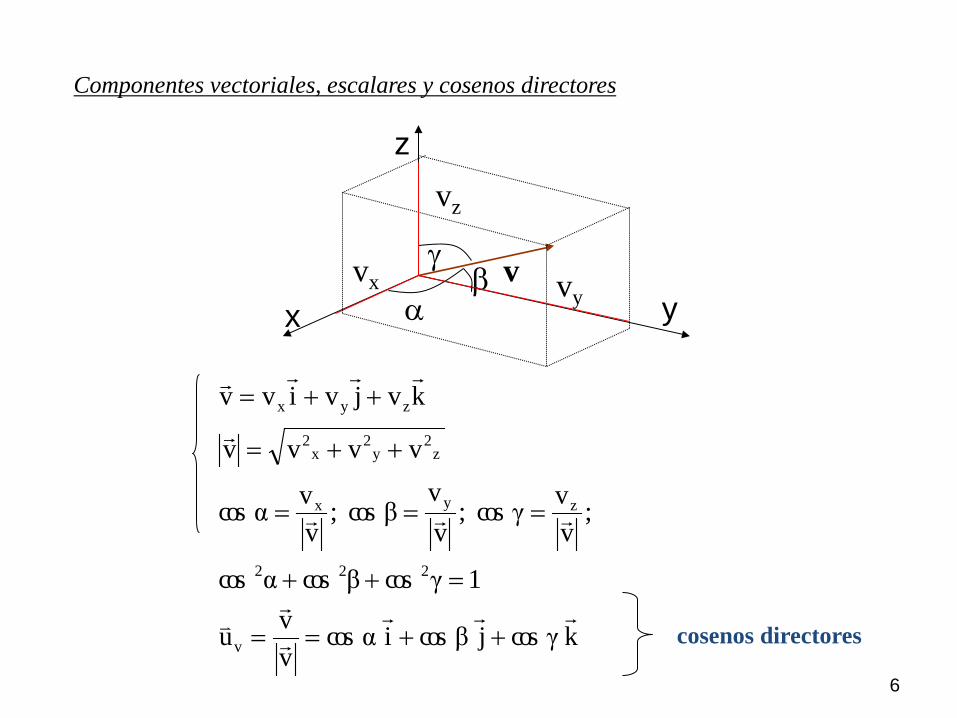
Componentes vectoriales, escalares y cosenos directores
v vx vy
vz
α β
γ
x y
z
cosenos directores
7
Determinación de un vector • 3 componentes
• Módulo y dos cosenos directores
• Coordenadas extremo E(xE, yE, zE) y origen O(xO, yO, zO)
Operaciones suma y producto por un escalar en función de las componentes:
( ) ( ) ( )kmvjmvimvvmp
kwvjwviwvwvs
zyx
zzyyxx
++==
+++++=+=
v = (xE-xO)i + (yE-yO)j + (zE-zO)k

8
3.- Producto escalar (resultado: un escalar)
a
b α
zzyyxx bababababa ++==⋅ αcos
Propiedades
•Distributiva
•Conmutativa
•No asociativa
• Escalar: > = < 0 • Vect. Perpendiculares prod. escalar 0 • Vect. Paralelos prod. escalar máximo • v . v = v2 • i . i = j . j = k . k = 1 • i . j = j . k = k . i = 0
a
b α

9
4.- Producto vectorial (resultado: un vector)
α αsenbaba
cba
=×
=×
Propiedades
•Seudovector
•Area del paralelogramo
•Distributiva
•No conmutativa
•No asociativa
• Perpendiculares = máximo • Paralelos = 0 • i x i = j x j = k x k = 0 • i x j = k • j x k = i • k x i = j
a b
i j k
ax ay az
bx by bz
a x b = = (aybz – azby)i + (azbx-axbz)j +(axby-aybx)k

10
5.- Otras operaciones
• Producto mixto: a x b . C
• Doble producto vectorial: a x b x c
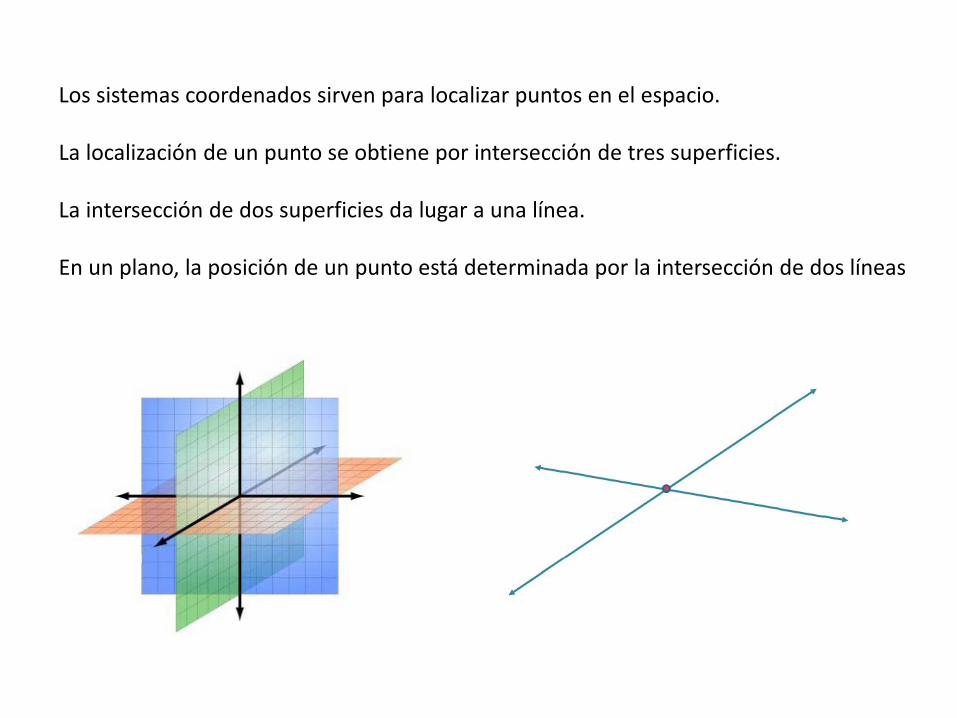
Los sistemas coordenados sirven para localizar puntos en el espacio. La localización de un punto se obtiene por intersección de tres superficies. La intersección de dos superficies da lugar a una línea. En un plano, la posición de un punto está determinada por la intersección de dos líneas
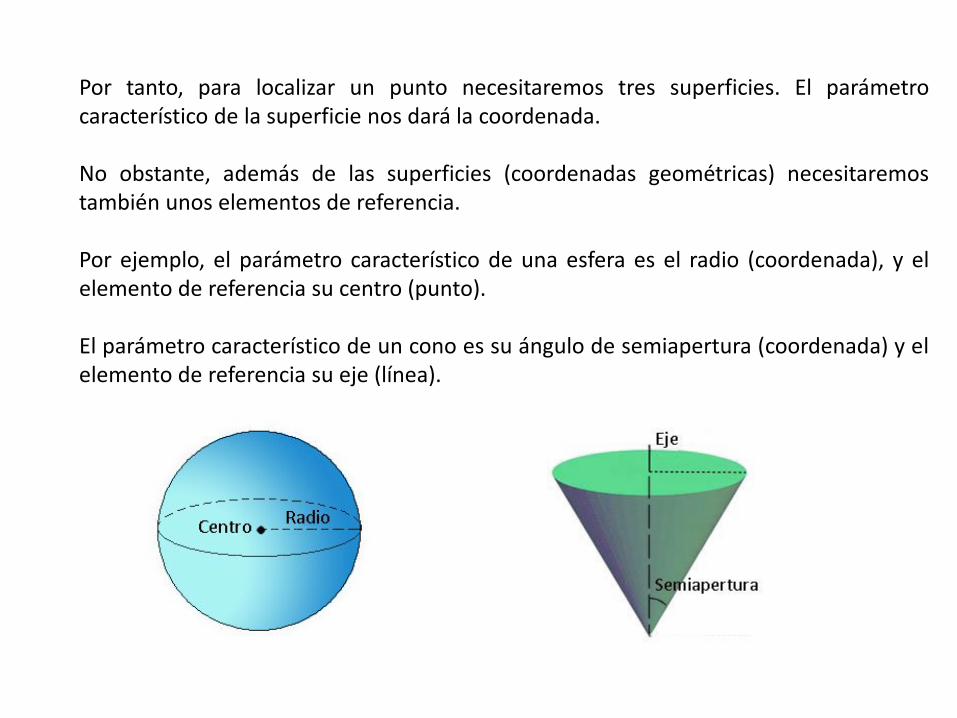
Por tanto, para localizar un punto necesitaremos tres superficies. El parámetro característico de la superficie nos dará la coordenada. No obstante, además de las superficies (coordenadas geométricas) necesitaremos también unos elementos de referencia. Por ejemplo, el parámetro característico de una esfera es el radio (coordenada), y el elemento de referencia su centro (punto). El parámetro característico de un cono es su ángulo de semiapertura (coordenada) y el elemento de referencia su eje (línea).
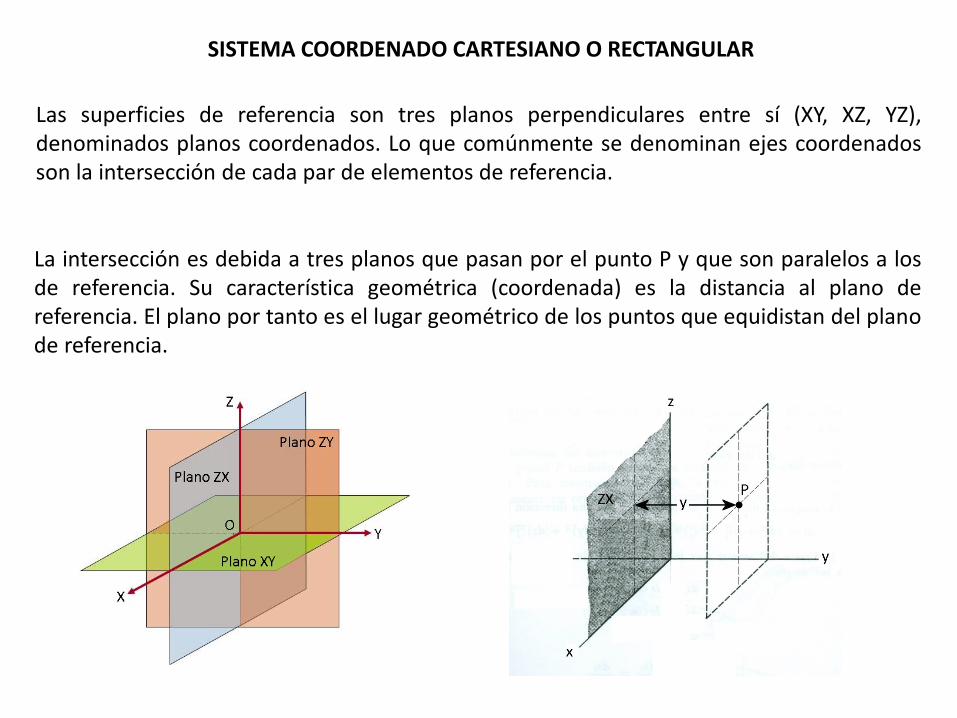
SISTEMA COORDENADO CARTESIANO O RECTANGULAR
Las superficies de referencia son tres planos perpendiculares entre sí (XY, XZ, YZ), denominados planos coordenados. Lo que comúnmente se denominan ejes coordenados son la intersección de cada par de elementos de referencia.
La intersección es debida a tres planos que pasan por el punto P y que son paralelos a los de referencia. Su característica geométrica (coordenada) es la distancia al plano de referencia. El plano por tanto es el lugar geométrico de los puntos que equidistan del plano de referencia.
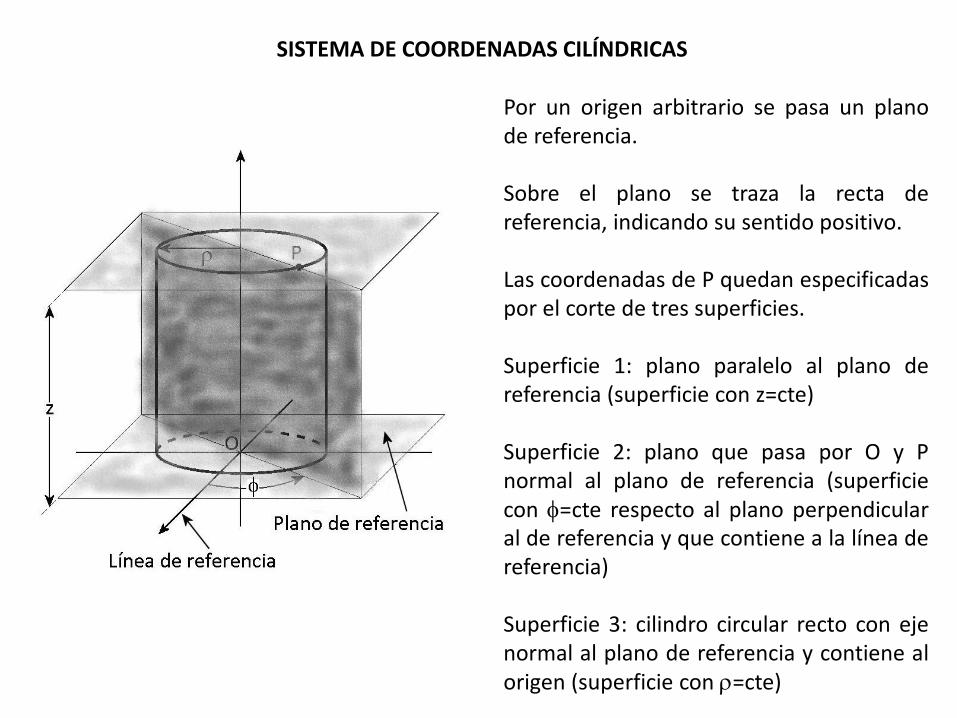
SISTEMA DE COORDENADAS CILÍNDRICAS
Por un origen arbitrario se pasa un plano de referencia. Sobre el plano se traza la recta de referencia, indicando su sentido positivo. Las coordenadas de P quedan especificadas por el corte de tres superficies. Superficie 1: plano paralelo al plano de referencia (superficie con z=cte) Superficie 2: plano que pasa por O y P normal al plano de referencia (superficie con φ=cte respecto al plano perpendicular al de referencia y que contiene a la línea de referencia) Superficie 3: cilindro circular recto con eje normal al plano de referencia y contiene al origen (superficie con ρ=cte)
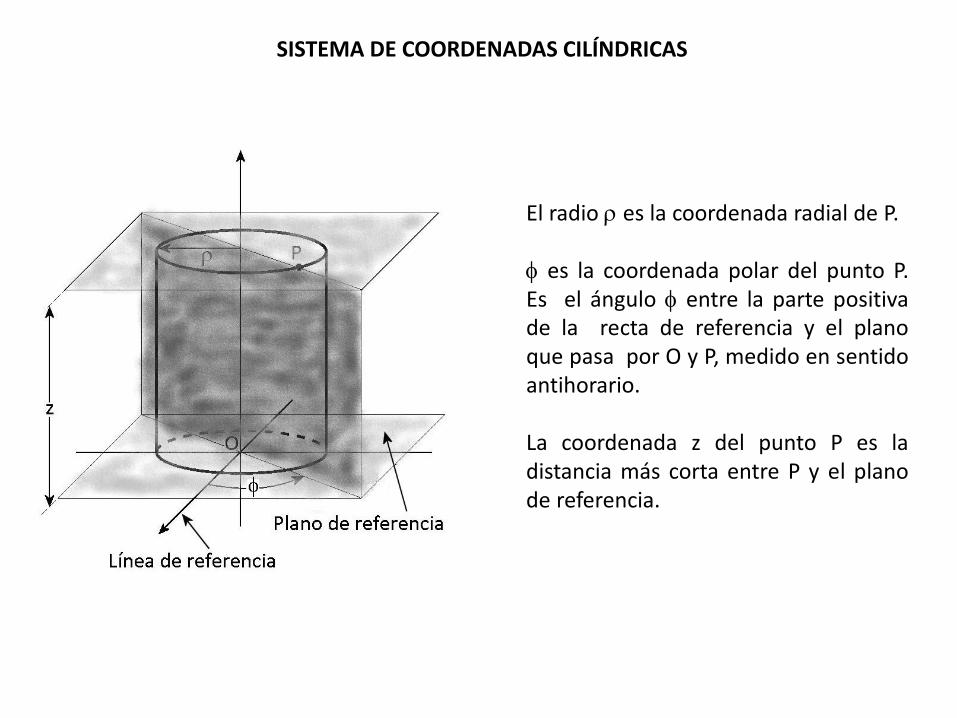
SISTEMA DE COORDENADAS CILÍNDRICAS
El radio ρ es la coordenada radial de P. φ es la coordenada polar del punto P. Es el ángulo φ entre la parte positiva de la recta de referencia y el plano que pasa por O y P, medido en sentido antihorario. La coordenada z del punto P es la distancia más corta entre P y el plano de referencia.

SISTEMA DE COORDENADAS ESFÉRICAS
Por un origen arbitrario se pasa un plano de referencia. Por el origen pasamos dos rectas perpendiculares entre sí (líneas de referencia) y asignamos sentido positivo a ambas. Las coordenadas de P quedan especificadas por el corte de tres superficies. Superficie 1: esfera con centro en el origen y radio r (superficie con r=cte) Superficie 2: plano con φ constante, donde φ es un ángulo medido en sentido antihorario a partir de la dirección positiva de la recta de referencia que está en el plano de referencia (superficie con φ=cte) Superficie 3: cono de semiapertura θ, con vértice en el origen y cuyo eje es la parte positiva de la recta de referencia perpendicular al plano de referencia. θ es el ángulo medido en el plano φ=cte a partir del plano de referencia (superficie con θ=cte)
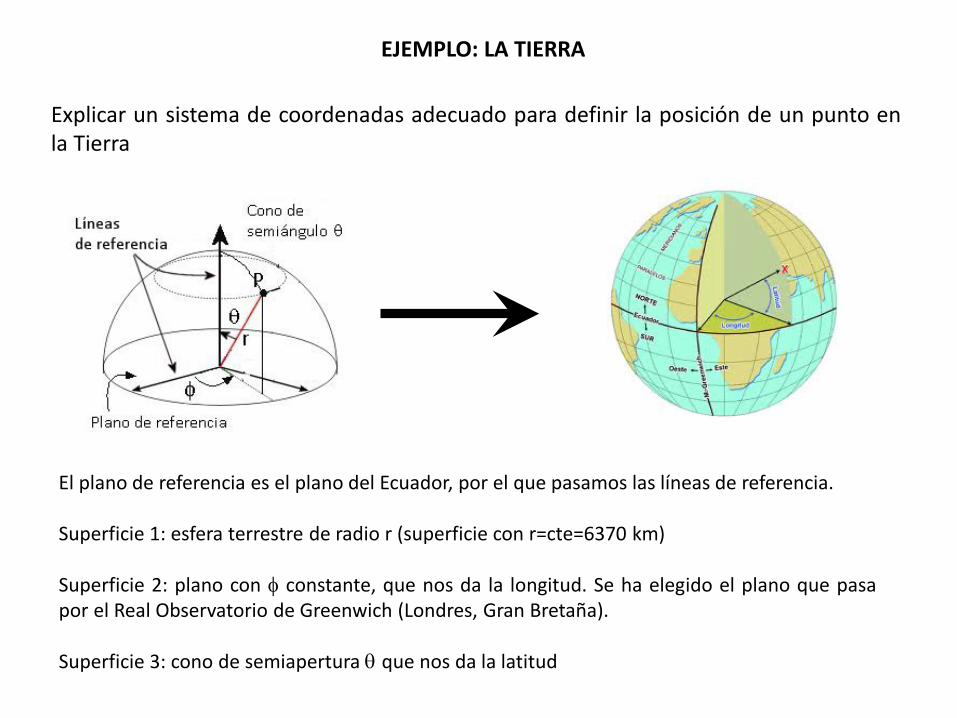
EJEMPLO: LA TIERRA
Explicar un sistema de coordenadas adecuado para definir la posición de un punto en la Tierra
El plano de referencia es el plano del Ecuador, por el que pasamos las líneas de referencia. Superficie 1: esfera terrestre de radio r (superficie con r=cte=6370 km) Superficie 2: plano con φ constante, que nos da la longitud. Se ha elegido el plano que pasa por el Real Observatorio de Greenwich (Londres, Gran Bretaña). Superficie 3: cono de semiapertura θ que nos da la latitud

ELEMENTO DIFERENCIAL DE RECORRIDO
El diferencial de recorrido dl asociado a una coordenada i dli se define en la dirección de máxima variación de la coordenada y sentido el de aumento de la coordenada. La dirección por tanto es perpendicular a la superficie de coordenada constante. Por ejemplo, en coordenadas cartesianas (que son las más sencillas) o en cilíndricas podemos ver dos ejemplos:
dly=dy Perpendicular al plano y=cte
dlρ=dρ Perpendicular al plano ρ=cte

Para cualquier coordenada por tanto podemos definir los vectores unitarios como:
idli
idlu =
Así, los vectores diferenciales de recorrido y de superficie serán:
dSi=│dSi│ui
dli=│dli │ui
Cualquier superficie Si por tanto es perpendicular al plano de coordenada i constante.

SISTEMA COORDENADO CARTESIANO O RECTANGULAR
Segmento elemental de recta con dirección arbitraria en un sistema cartesiano: dl Elemento de longitud dlx normal al plano x=cte: dlx =dx Elemento de longitud dly normal al plano y=cte: dly =dy Elemento de longitud dlz normal al plano z=cte: dlz =dz
La magnitud del elemento de longitud en una dirección arbitraria es:
222222 dzdydxdldldldl zyx ++=++=

SISTEMA COORDENADO CARTESIANO O RECTANGULAR
dSx=dy dz dSy=dx dz dSz=dx dy
dV=dx dy dz
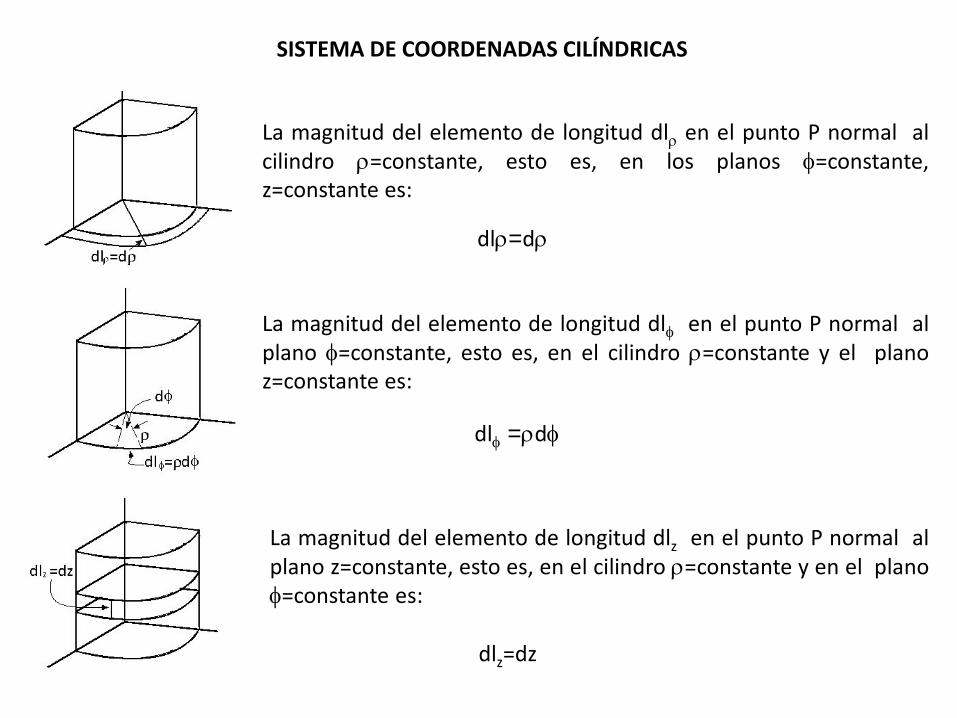
SISTEMA DE COORDENADAS CILÍNDRICAS
La magnitud del elemento de longitud dlρ en el punto P normal al cilindro ρ=constante, esto es, en los planos φ=constante, z=constante es:
dlρ=dρ
La magnitud del elemento de longitud dlφ en el punto P normal al plano φ=constante, esto es, en el cilindro ρ=constante y el plano z=constante es:
dlφ =ρdφ
La magnitud del elemento de longitud dlz en el punto P normal al plano z=constante, esto es, en el cilindro ρ=constante y en el plano φ=constante es:
dlz=dz
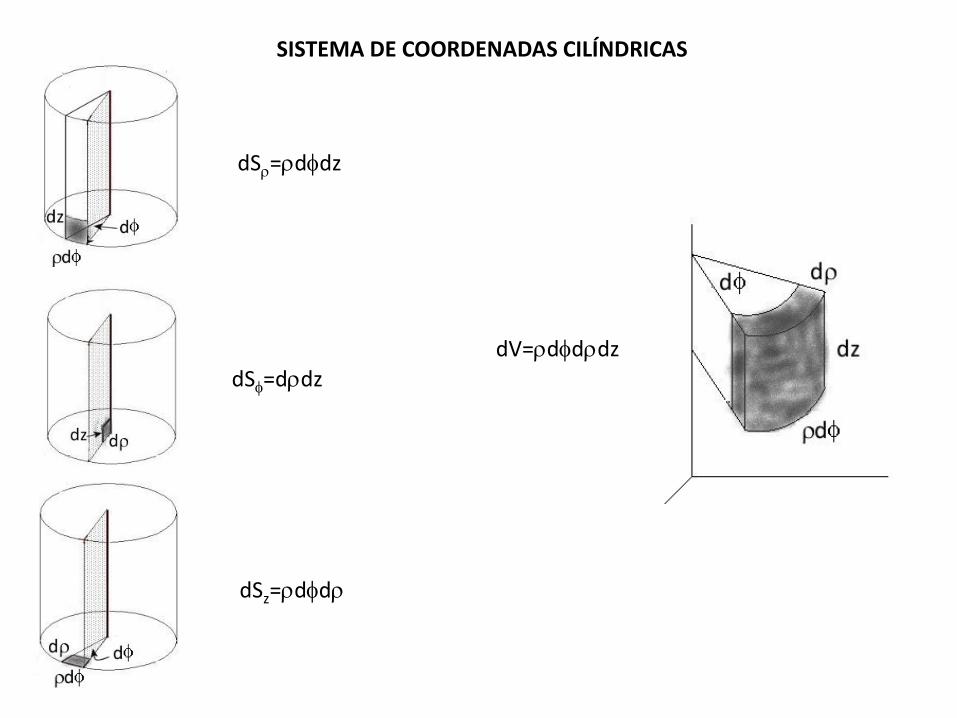
dSρ=ρdφdz
dSφ=dρdz
dSz=ρdφdρ
dV=ρdφdρdz
SISTEMA DE COORDENADAS CILÍNDRICAS
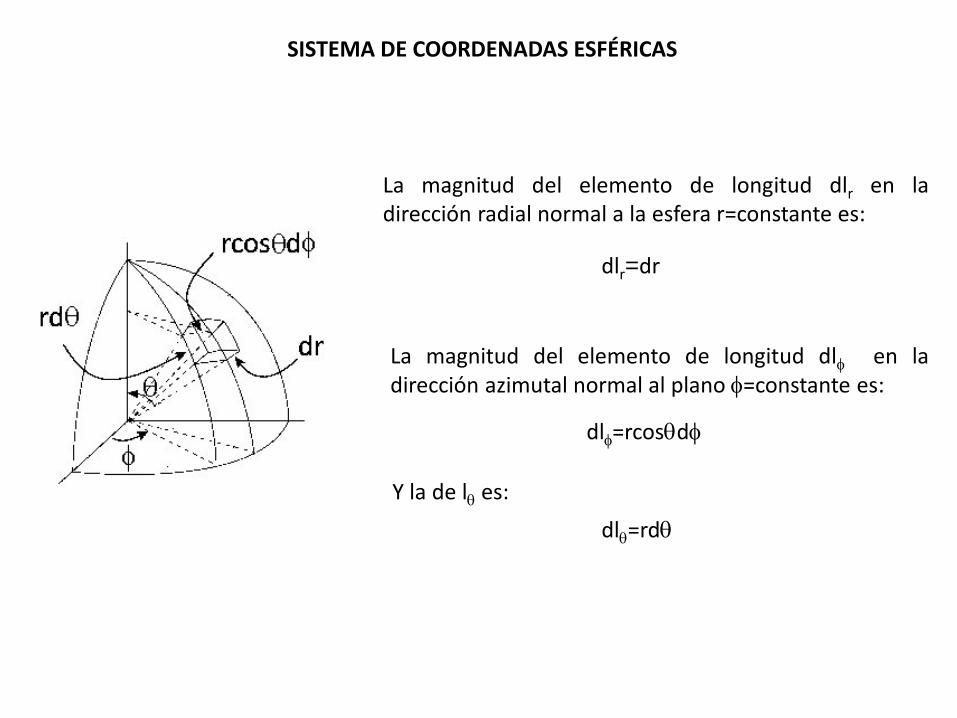
SISTEMA DE COORDENADAS ESFÉRICAS
La magnitud del elemento de longitud dlr en la dirección radial normal a la esfera r=constante es:
dlr=dr
La magnitud del elemento de longitud dlφ en la dirección azimutal normal al plano φ=constante es:
dlφ=rcosθdφ
Y la de lθ es:
dlθ=rdθ

SISTEMA DE COORDENADAS ESFÉRICAS
La magnitud de los elementos de área dSr, dSφ y dSθ en P que están sobre la esfera de radio r, el plano φ=constante y el cono de semiapertura θ=constante, están dadas por:
dSr=r2cosθdφdθ dSφ=rdrdθ
dSθ=rcosθdrdφ
Y el elemento de volumen dV estará dado por:
dV=r2cosθdrdφdθ

CAMBIO DE COORDENADAS
Si la posición de P está dada en coordenadas cilíndricas por P(r, q, z), y deseamos determinar sus coordenadas cartesianas, suponiendo el mismo origen, podemos ver que:
x=ρcosφ y=ρsenφ
z=z Inversamente, si P está dado en coordenadas cartesianas, sus coordenadas cilíndricas están dadas por:
22 yx +=ρ
z=z xytanarc=φ
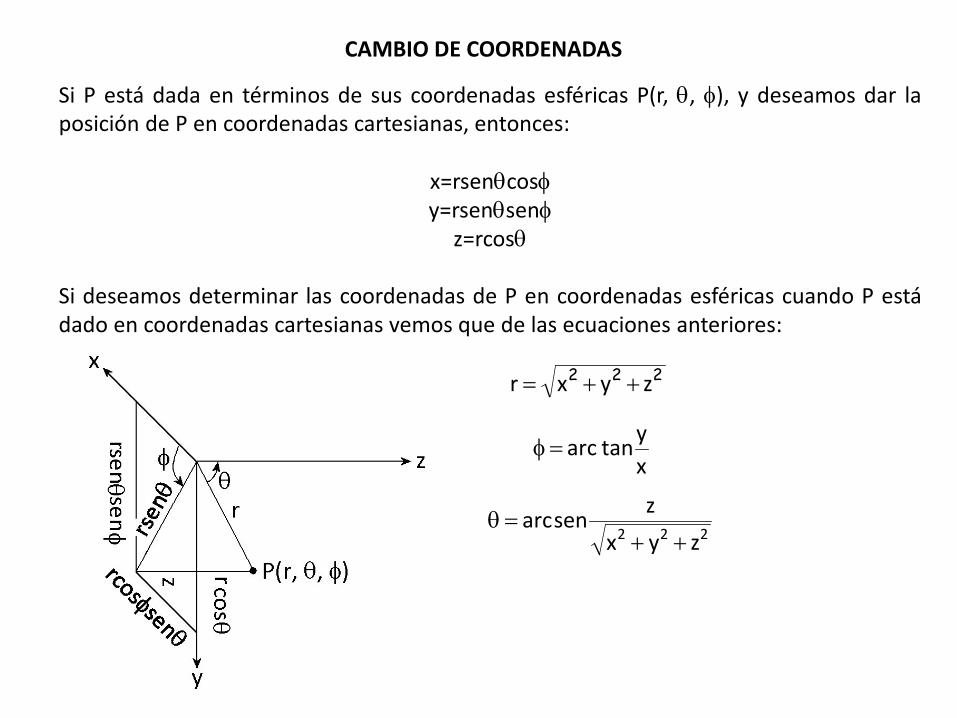
CAMBIO DE COORDENADAS
Si P está dada en términos de sus coordenadas esféricas P(r, θ, φ), y deseamos dar la posición de P en coordenadas cartesianas, entonces:
x=rsenθcosφ y=rsenθsenφ
z=rcosθ Si deseamos determinar las coordenadas de P en coordenadas esféricas cuando P está dado en coordenadas cartesianas vemos que de las ecuaciones anteriores:
222 zyxr ++=
xytanarc=φ
222 zyxzsenarc
++=θ

CAMBIO DE COORDENADAS
Si las coordenadas cilíndricas de P son:
ρ=rcosθ φ=φ
z=rcosθ donde r, θ, φ son las coordenadas esféricas de P, P(ρ, φ, z) pueden ser transformadas a P(r, θ, φ) por medio de:
22 zr +ρ=
φ=φ
22 zzcosarc
ztanarc
+ρ=
ρ=θ