clase 2 eslabonamientos
TRANSCRIPT
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 1/53
CINEMÁTICA DEMECANISMO
Ing. Guillermo Coz G.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 2/53
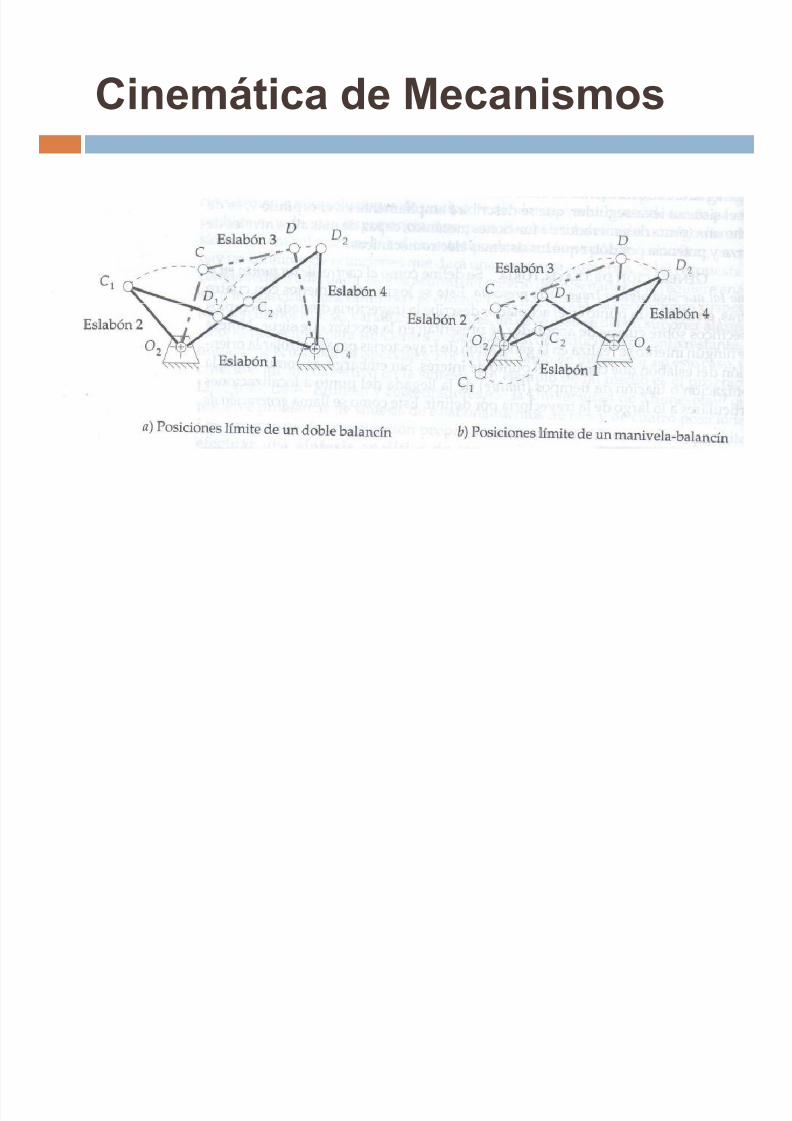
Posición de agarrotamiento :
Una prueba importante se aplica dentro de los
procedimientos de síntesis que se describen a
continuación. Se necesita com robar ue el
Cinemática de Mecanismos
eslabonamiento puede, en realidad, alcanzar todas las posiciones de diseño especificas, sin
encontrar una posición limite o de
agarrotamiento (toggle).
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 3/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 4/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 5/53
Angulo de trasmisión
Otra prueba útil que puede ser aplicada muyrápidamente a un diseño de eslabonamiento para juzgar su calidad, es la medida de su ángulo detrasmisión este ángulo se define como el ángulo
Cinemática de Mecanismos
que orma e es a n e sa a con e acop a or,generalmente se toma como el valor absoluto delángulo agudo del par de angulos formados en laintersección de los dos eslabones y varia
continuamente desde un valor máximo hasta unomínimo, a medida que el eslabonamiento para por su intervalo de movimiento.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 6/53
Cinemática de Mecanismos
El ángulo optimo es de 90°, la mayoría de los diseñadores de maquinas
tratan de mantener el ángulo de trasmisión mínimo aprox. Arriba de 35°, con
el fin de promover un movimiento suave y una adecuada trasmisión de
fuerza.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 7/53
Soluciones para movimientos de 2 posiciones.
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 8/53
Eslabonamiento terminado
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 9/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 10/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 11/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 12/53
Cinemática de Mecanismos Agregar una diada (cadena de dos barras) para
controlar el movimiento ej. Anterior con un motor.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 13/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 14/53
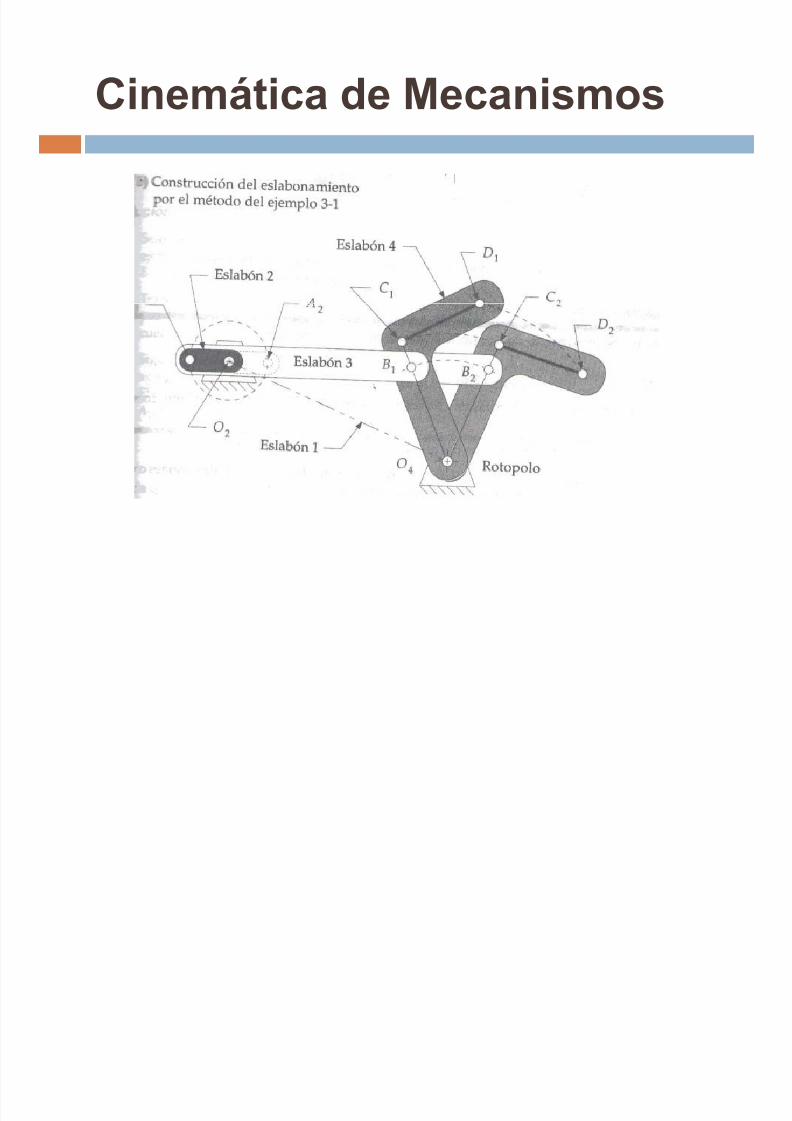
Cinemática de MecanismosSíntesis de tres posiciones con pivotes
móviles especificados:La síntesis de tres posiciones permite la
definición de tres ubicaciones en línea en el
plano, y creara una configuración deeslabonamiento de cuatro barras, para moverlos
en cada una de esas posiciones. Este es un
problema de generación de movimiento.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 15/53
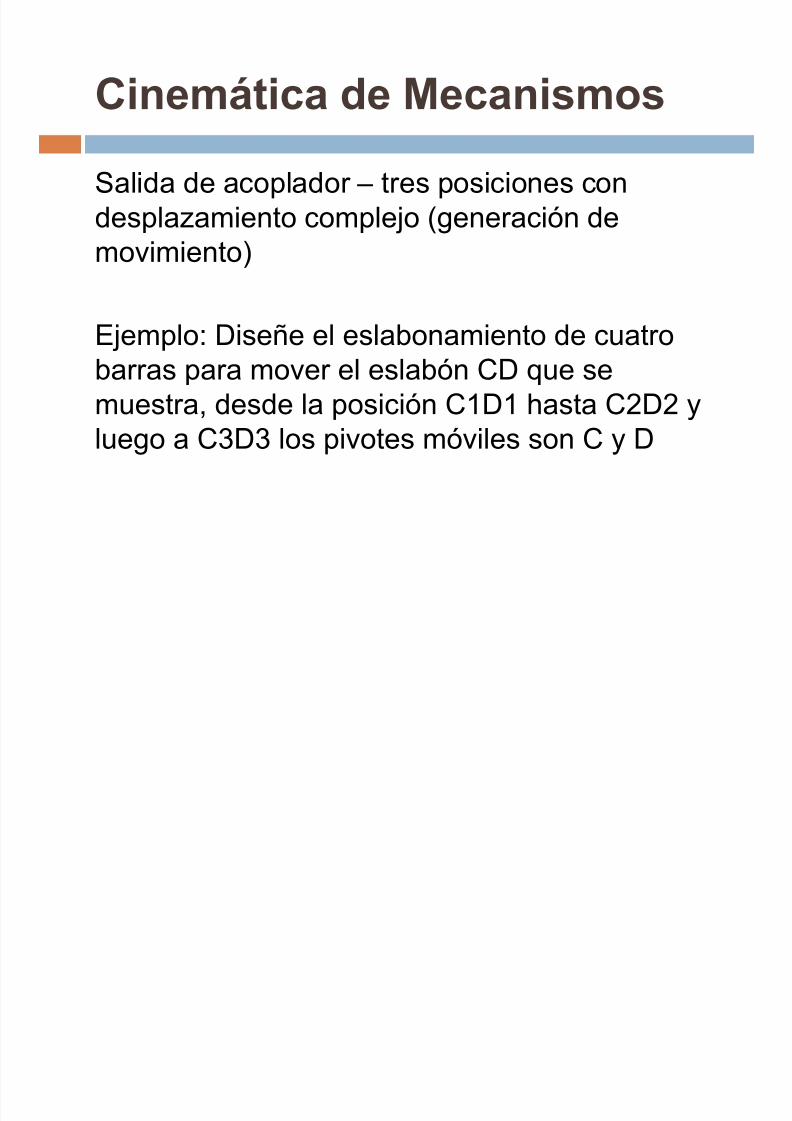
Cinemática de MecanismosSalida de acoplador – tres posiciones con
desplazamiento complejo (generación demovimiento)
Ejemplo: Diseñe el eslabonamiento de cuatro
barras para mover el eslabón CD que se
muestra, desde la posición C1D1 hasta C2D2 y
luego a C3D3 los pivotes móviles son C y D
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 16/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 17/53
Cinemática de MecanismosSíntesis de tres posiciones con pivotes
móviles alternos:Otro problema potencial es la posibilidad de una
ubicación indeseable de los ivotes fi os O2
O4 con respecto a sus restricciones deubicación. Por ej. Si el pivote fijo para un diseño
de eslabonamiento de limpiaparabrisas termina
a la mitad del parabrisas, puede ser deseablerediseñarlo.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 18/53
Cinemática de MecanismosSalida de acoplador tres posiciones con
desplazamiento complejo-puntos de uniónalternos para pivotes móviles.
Ej: Diseñar un eslabonamiento de cuatro barras
que mueva el eslabón CD que se muestra, de la
posición C1D1 a la C2D2 y luego a la posición
C3D3. Utilice diferentes pivotes móviles en lugar de CD. Obtenga las ubicaciones de pivote fijo.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 19/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 20/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 21/53
Cinemática de MecanismosSíntesis de tres posiciones con pivotes fijosespecificados: Aunque es posible obtener una solución aceptablepara el problema de tres posiciones por los métodosdescritos en los dos ejemplos anteriores, puede
verse que e se a or poco con ro rec o so re aubicación de los pivotes fijos ya que estos son unode los resultados de la síntesis. Es común que setenga limitaciones acerca de las ubicacionesaceptables de los pivotes fijos puesto que estaránlimitados para localizaciones en las cuales seaaccesible el plano de fijación del conjunto.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 22/53
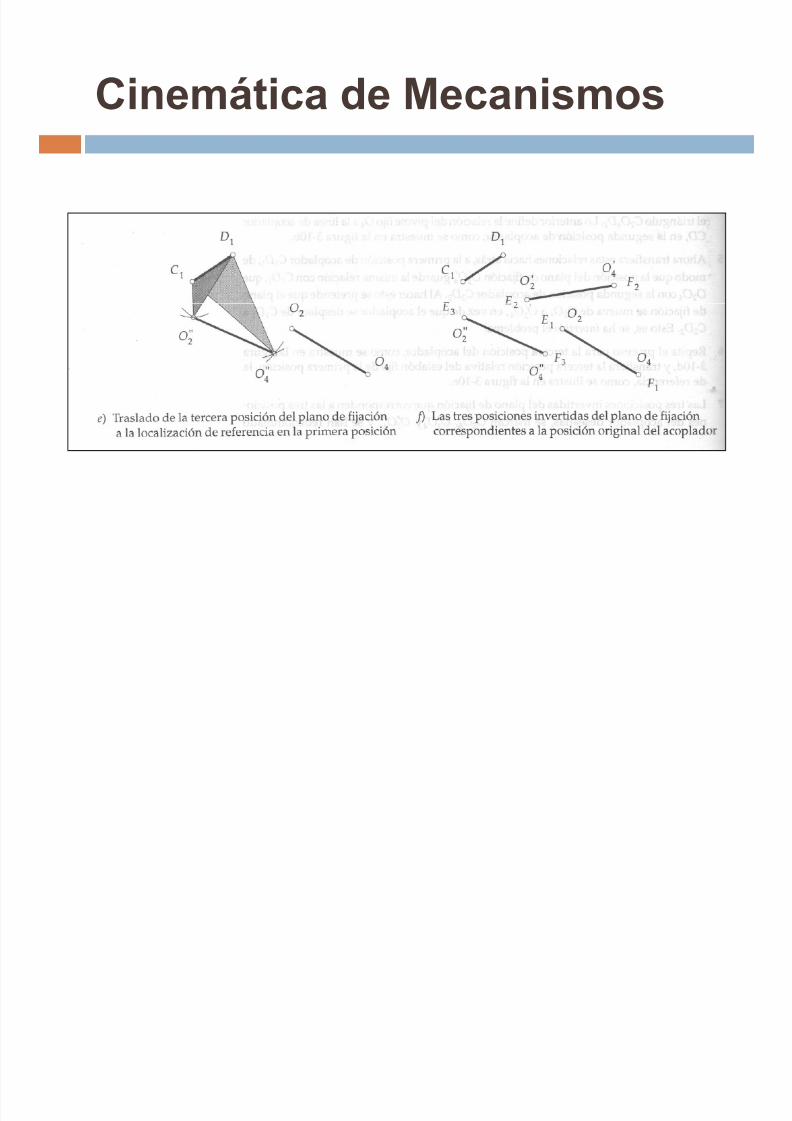
Cinemática de MecanismosSíntesis de tres posiciones con pivotes fijos
especificados-inversión del problema de síntesisde movimiento de tres posiciones.
Ej: Invertir un eslabonamiento que mueva eleslabón CD de la posición C1D1 a la C2D2 y
luego a la posición C3D3. Aplique los pivotes
fijos especificados O2 y O4.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 23/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 24/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 25/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 26/53
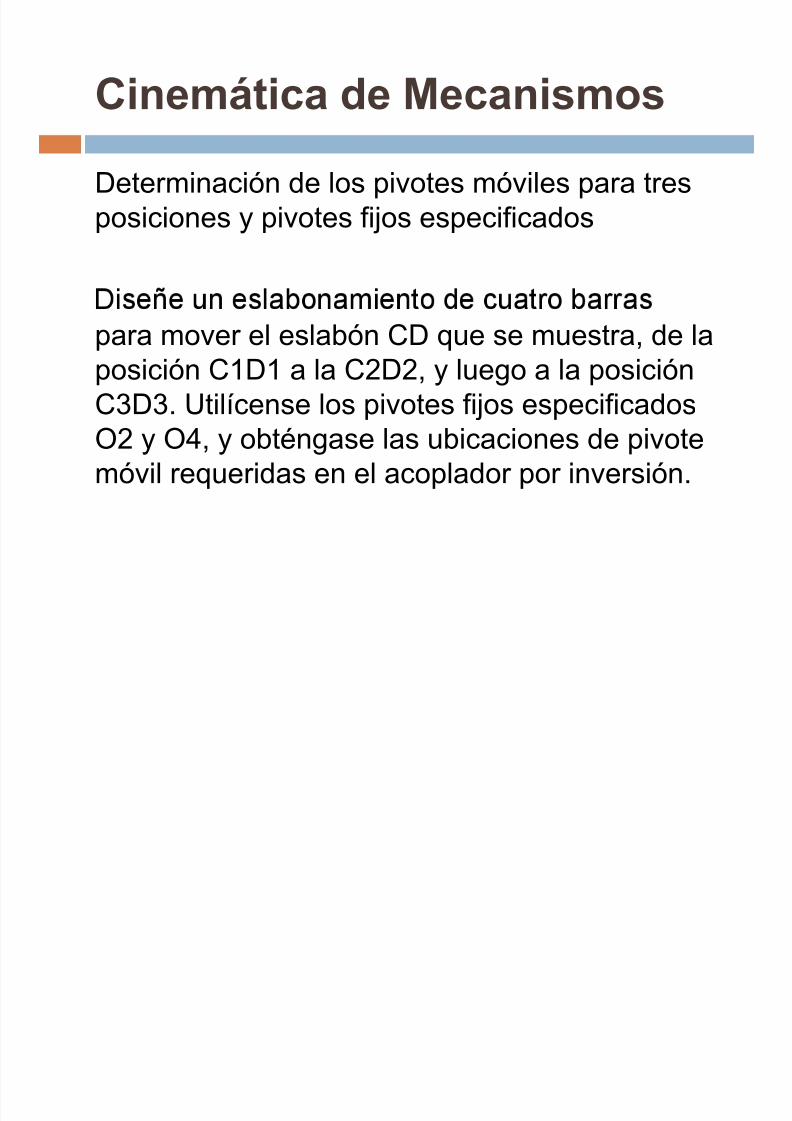
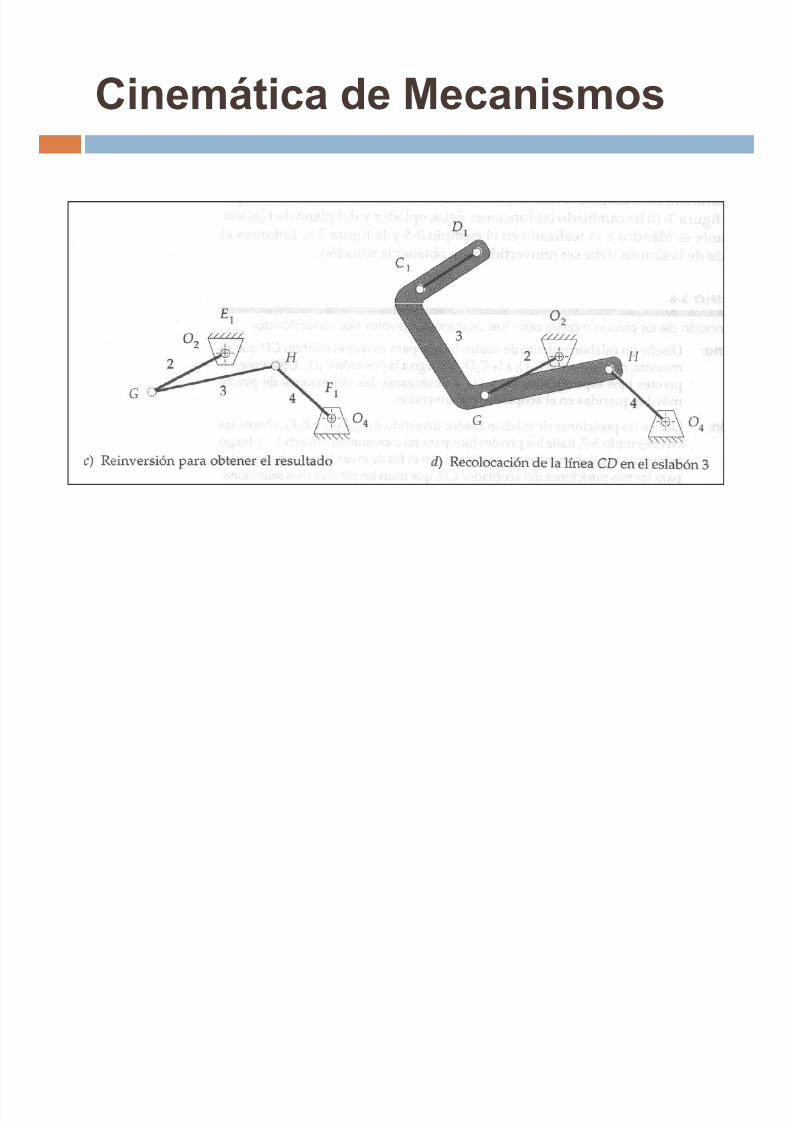
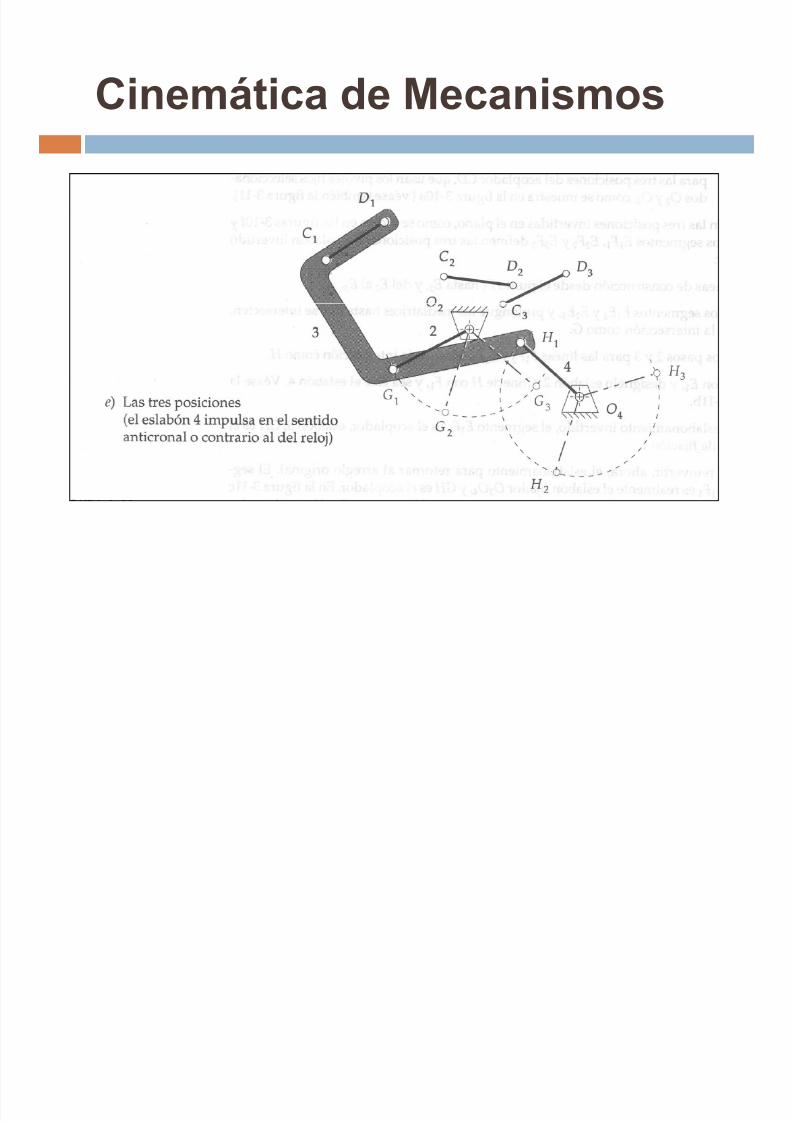
Cinemática de MecanismosDeterminación de los pivotes móviles para tres
posiciones y pivotes fijos especificados
para mover el eslabón CD que se muestra, de laposición C1D1 a la C2D2, y luego a la posición
C3D3. Utilícense los pivotes fijos especificados
O2 y O4, y obténgase las ubicaciones de pivotemóvil requeridas en el acoplador por inversión.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 27/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 28/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 29/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 30/53

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 31/53

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 32/53

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 33/53
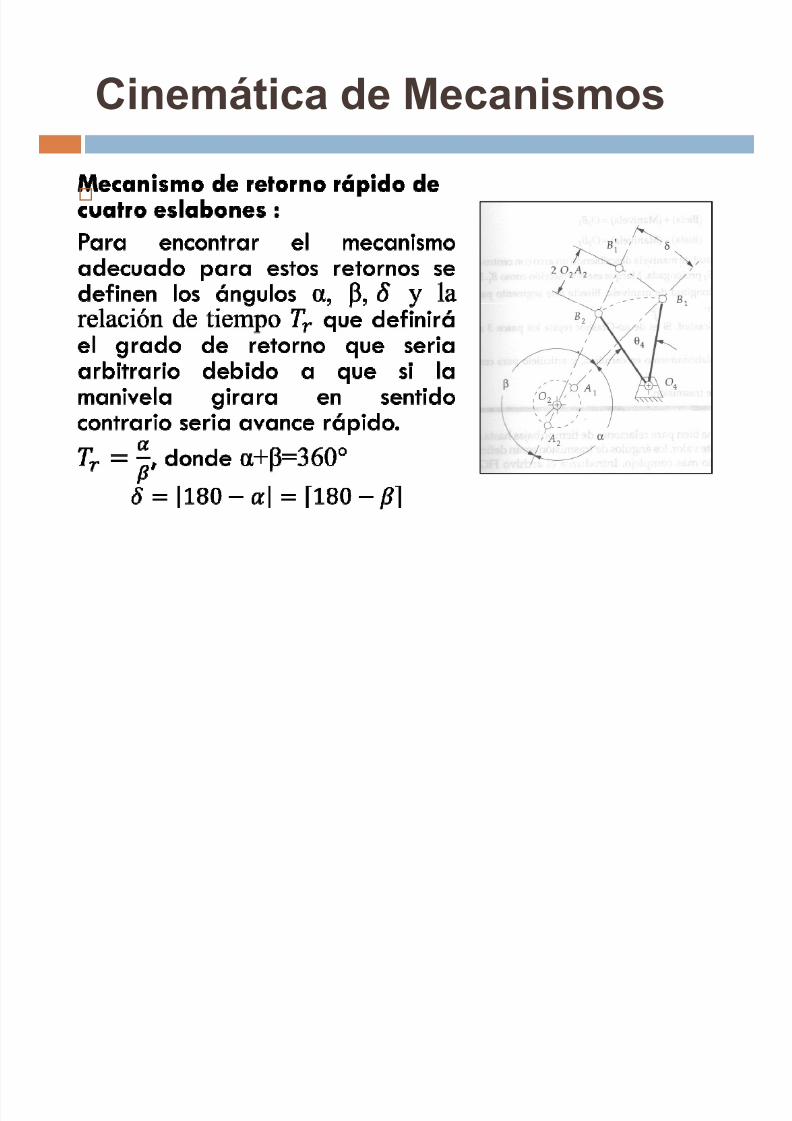
Cinemática de MecanismosMecanismo de retorno rápido :
Muchos aplicaciones de diseño de maquinastienen necesidad de una diferencia en velocidadmedia entre sus carreras “hacia adelante” y “ dere orno por o com n se rea za a g n ra a oexterno por el eslabonamiento en la carrerahacia adelante y la de regreso necesitaefectuarse rápidamente, de modo que un
máximo de tiempo quede disponible para lacarrera de trabajo.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 34/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 35/53
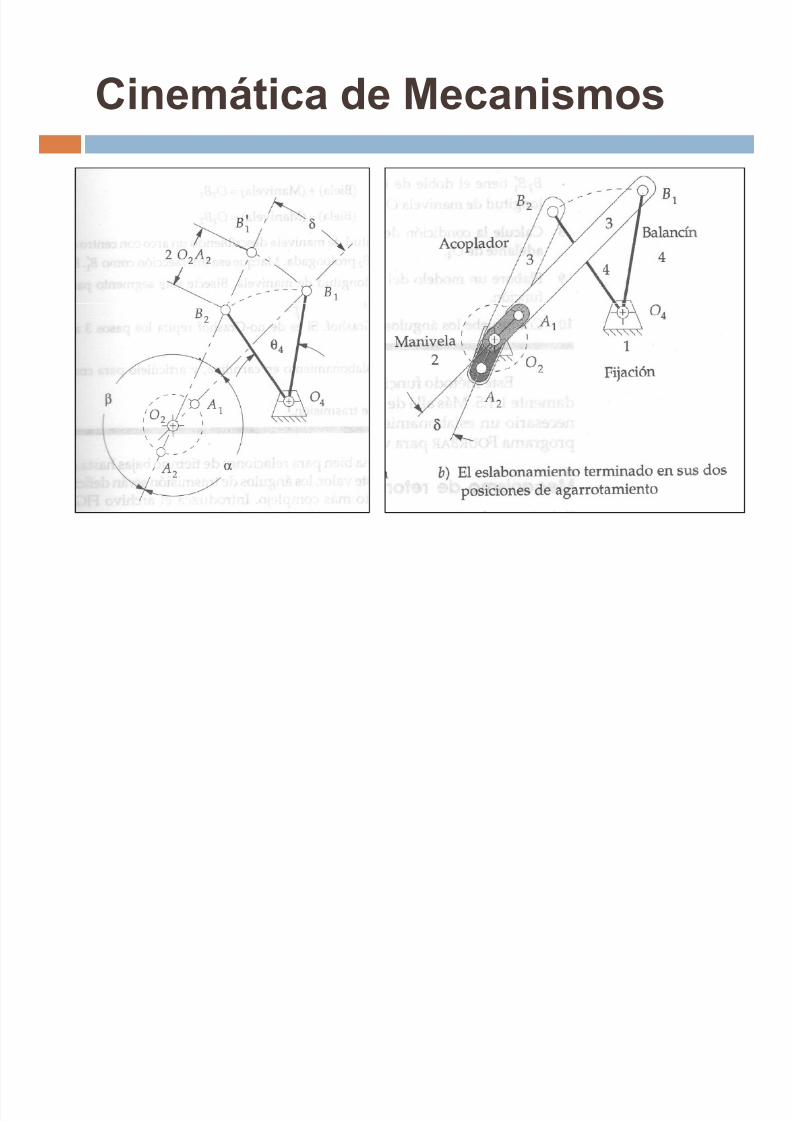
Cinemática de MecanismosEslabonamiento de manivela-balancín de cuatro
barras y de retorno rápido.Ej: Rediseñe el ej. Según figura para
ro orcionar una relación de tiem o de 1:1.25
23
con movimiento de balancín de salida de 45°
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 36/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 37/53
Cinemática de MecanismosEste método funciona bien para relaciones de
tiempo bajas hasta aproximadamente 1:1.5 Masallá de este valor, los ángulos de trasmisión
serán deficientes y es necesario un
eslabonamiento mas complejo.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 38/53
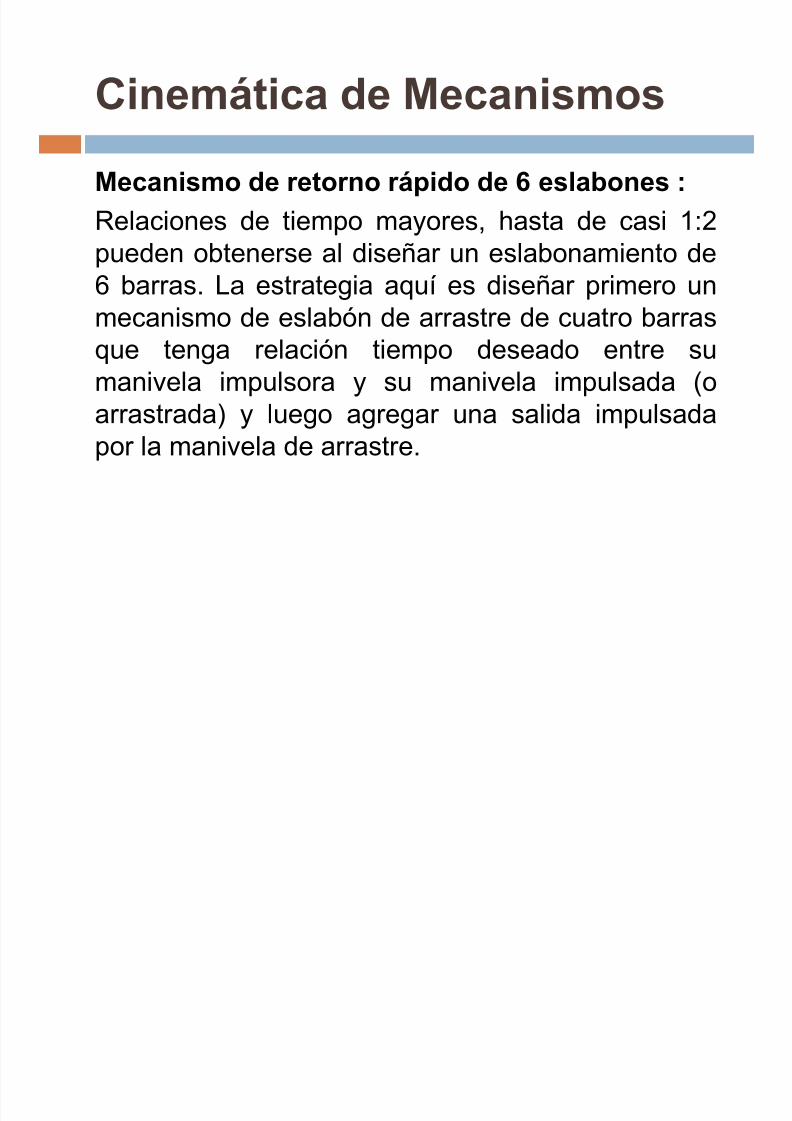
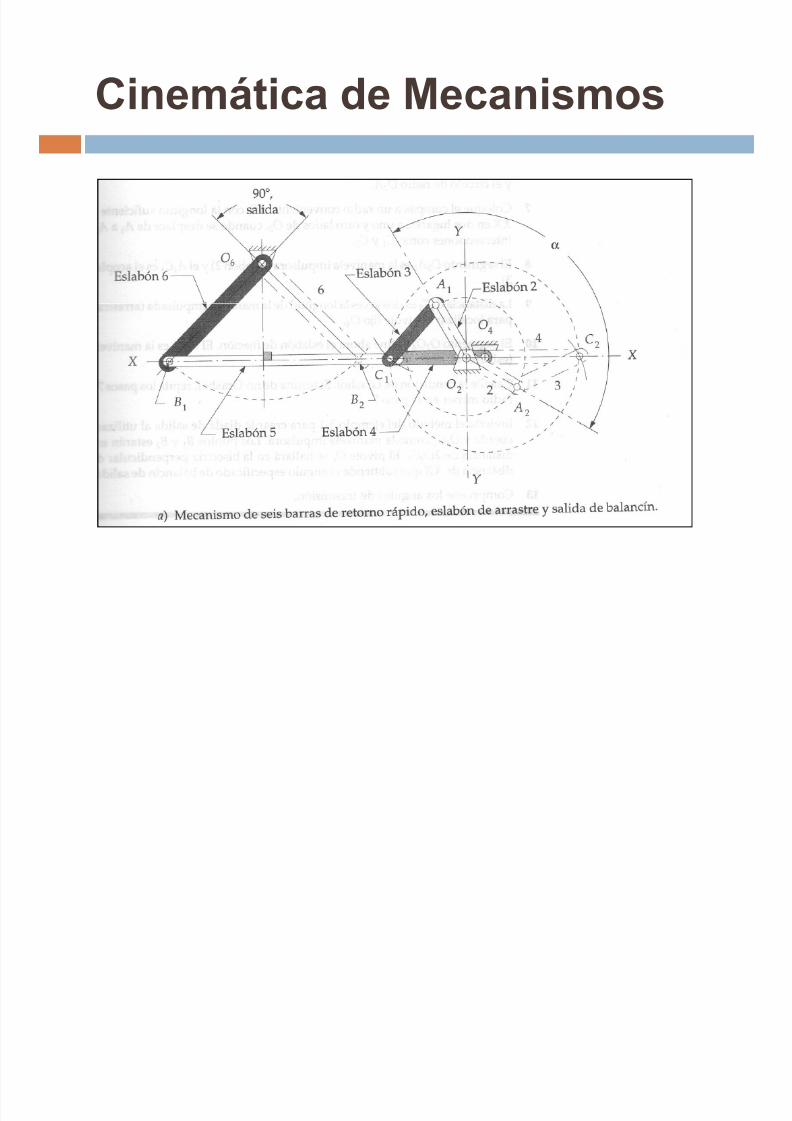
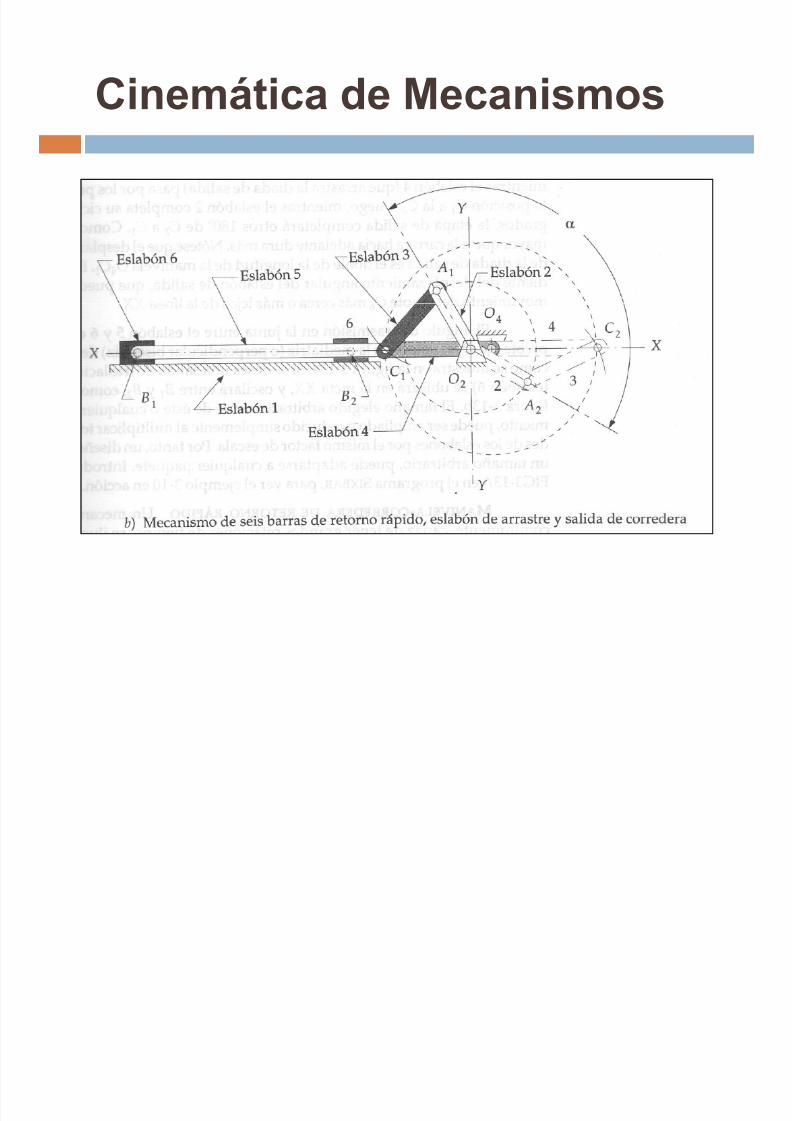
Cinemática de MecanismosMecanismo de retorno rápido de 6 eslabones :
Relaciones de tiempo mayores, hasta de casi 1:2pueden obtenerse al diseñar un eslabonamiento de
6 barras. La estrategia aquí es diseñar primero un
mecanismo de eslabón de arrastre de cuatro barrasque tenga relación tiempo deseado entre su
manivela impulsora y su manivela impulsada (o
arrastrada) y luego agregar una salida impulsada
por la manivela de arrastre.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 39/53
Cinemática de MecanismosEj: Proporcione una relación de tiempo de 1:1.4
con movimiento de balancín de 90°
31
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 40/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 41/53
Cinemática de Mecanismos1. Calcular α y β
2. Trazar una recta XX
3. Elegir una posición O2 de la manivela en la recta XX y traceun eje YY perpendicular a XX.
4. Trace un circulo conveniente O2A.
. ,
cuadrante uno.6. Marque el punto A1 y A2 en las intersecciones de las líneas
que subcontienen al ángulo α y el circulo de radio O2A.
7. Coloque el compas a un radio conveniente AC, con longitudsuficiente para cortar a XX en dos lugares, a uno y otro ladode O2, cuando se desplace A1 a A2 marque lasintersecciones como C1 y C2.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 42/53
Cinemática de Mecanismos8. El segmento O2A1 es la manivela impulsora
y el A1C1 acoplador 9. La distancie C1C2 es dos veces la longitud
de la manivela impulsada (arrastrada).sec e a para oca zar e p vo e o .
10. El segmento O2O4 define ahora el eslabónde fijación. El O4C1 es la manivelaimpulsada (eslabón 4).
11. Calcule la condición de grashof si resulta nograshof repita los pasos 7 al 11.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 43/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 44/53
Cinemática de MecanismosManivela corredera de retorno rápido :
Un mecanismo utilizado comúnmente, capaz detener grandes relaciones de tiempo. Con frecuencia
se aplica en maquinas conformadoras de metal
(acepilladoras) para proporcionar una carrera deavance lento (corte) y una de retorno rápido.
De acuerdo con las longitudes relativas de los
eslabones, esta cadena se conoce como
mecanismo de whitworth o manivela de
acepilladora.

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 45/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 46/53
Cinemática de Mecanismos
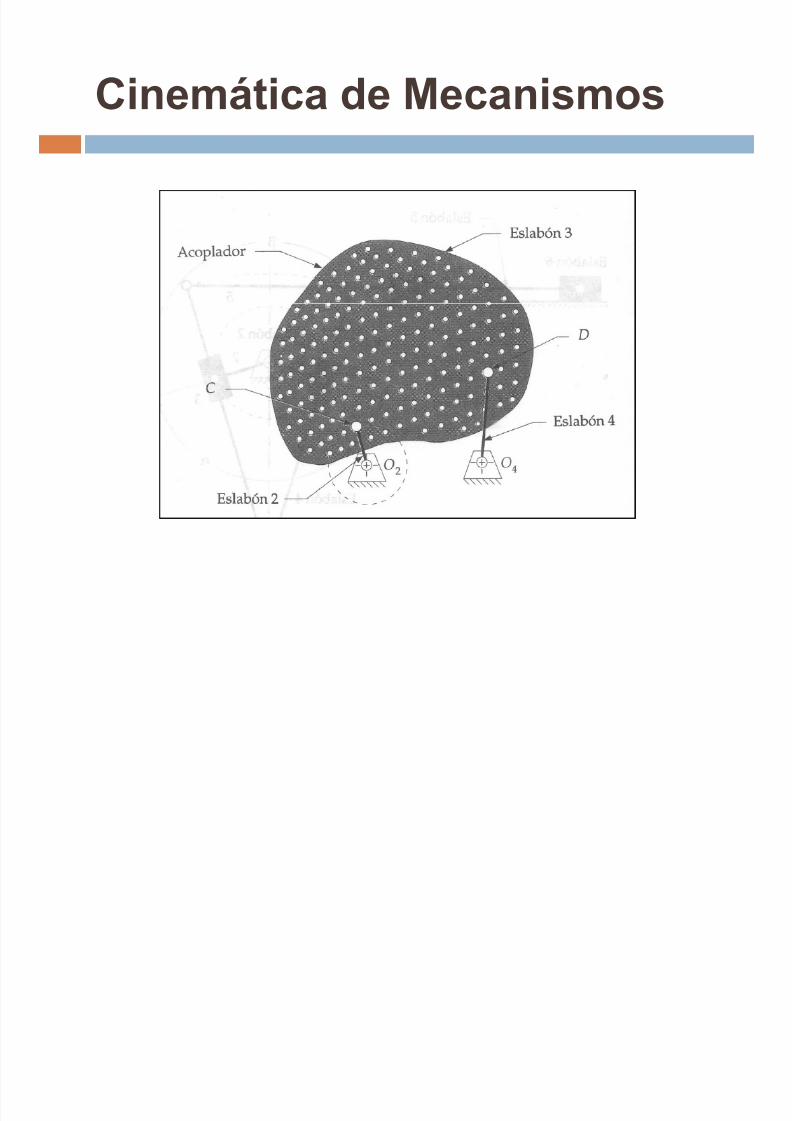
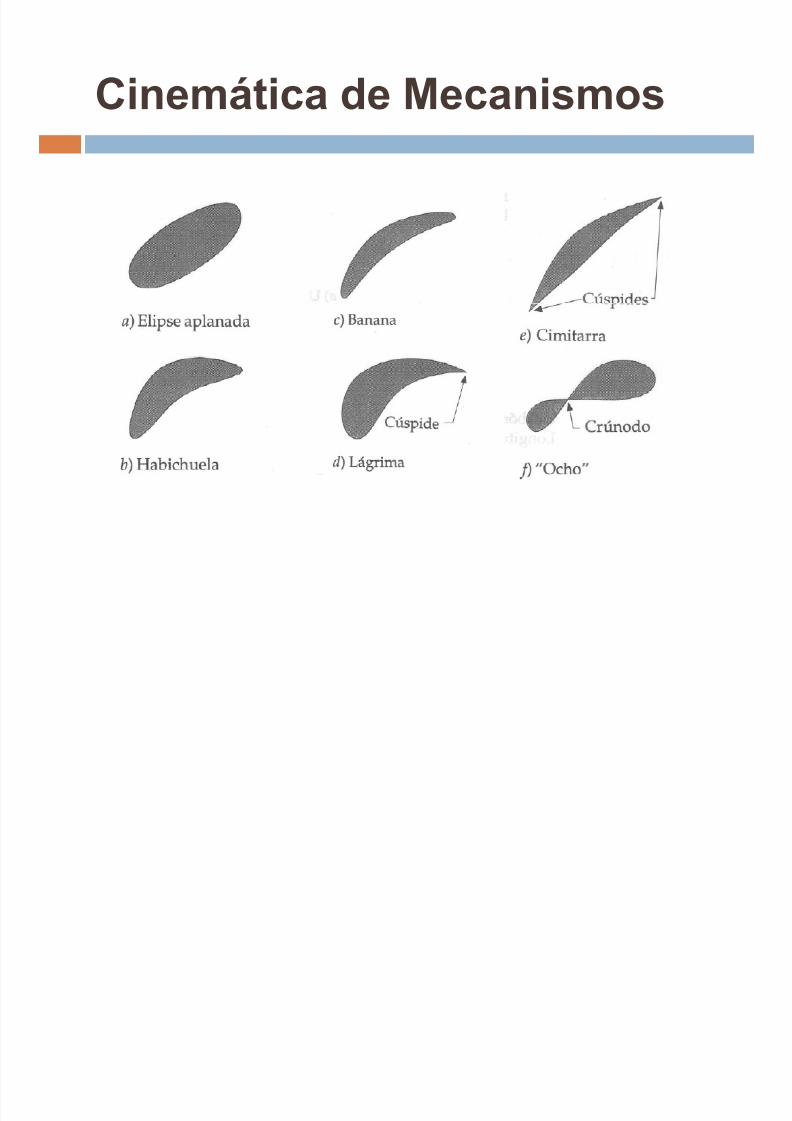
Curvas de acoplador :El acoplador es el eslabón mas interesante en cualquier
eslabonamiento. Esta en movimiento complejo y, por tanto, los puntos en tal elemento pueden tener movimientos de trayectoria de alto grado. En general,
,
grado de la curva generada. El grado es la potenciamas elevada de una función, la manivela corredera de 4barras tiene, en general, curvas de acoplador de cuartogrado. El eslabonamiento de cuatro barras con juntasde pasador, hasta de sexto grado. Todos loseslabonamientos que poseen uno o mas eslabones deacopladores “flotantes” generan curvas de acoplador yserán cerradas.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 47/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 48/53
Cinemática de Mecanismos
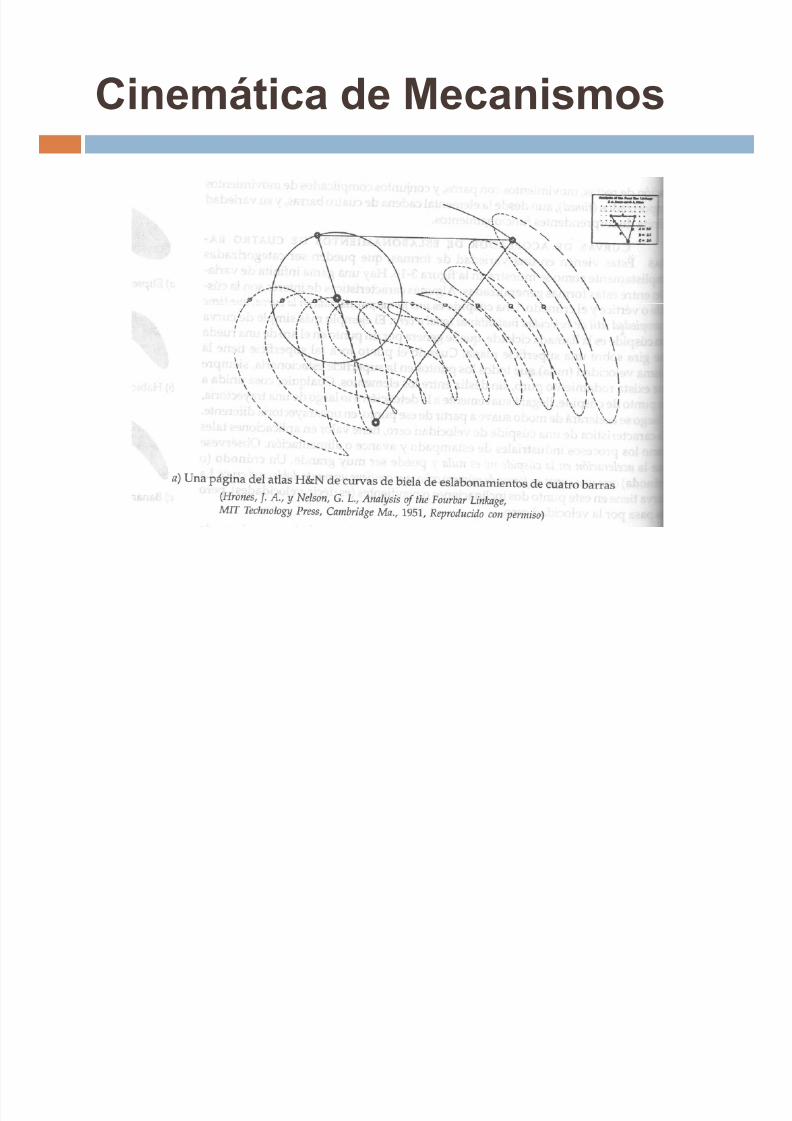
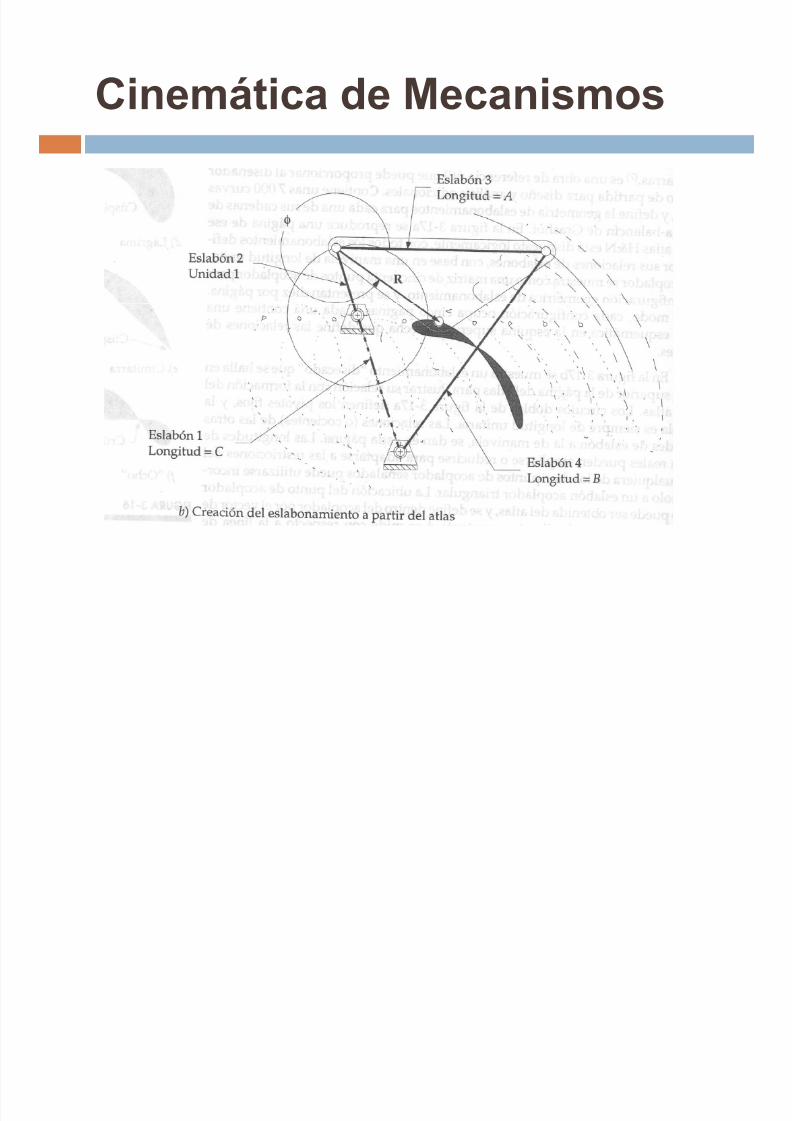
Curvas de acoplador de eslabonamiento decuatro barras:Estas vienen en varias formas y pueden clasificarsede forma en simple según lo mostrado en la figura,
vértice y el crunodo.El atlas de Hrones y Nelson de curvas de acoplador en cadenas de cuatro barras, contiene mas de 7000curvas de biela, y define la geometría deeslabonamientos para cada una de sus cadenas demanivela-balancín.
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 49/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 50/53
Cinemática de Mecanismos
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 51/53
Cinemática de Mecanismos

8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 52/53
Cinemática de Mecanismos
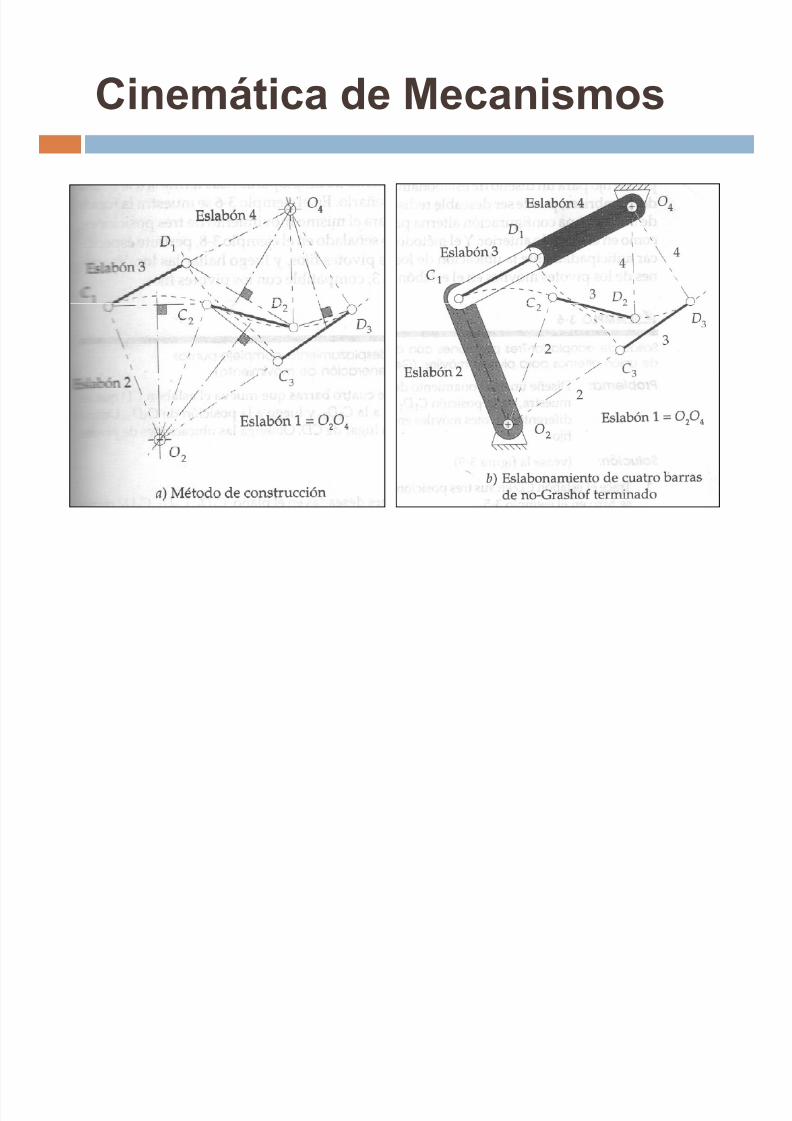
Ej: el mecanismo de avance de películas de una
cámara cinematográfica.
Ci áti d M i
8/18/2019 Clase 2 Eslabonamientos
http://slidepdf.com/reader/full/clase-2-eslabonamientos 53/53
Cinemática de Mecanismos
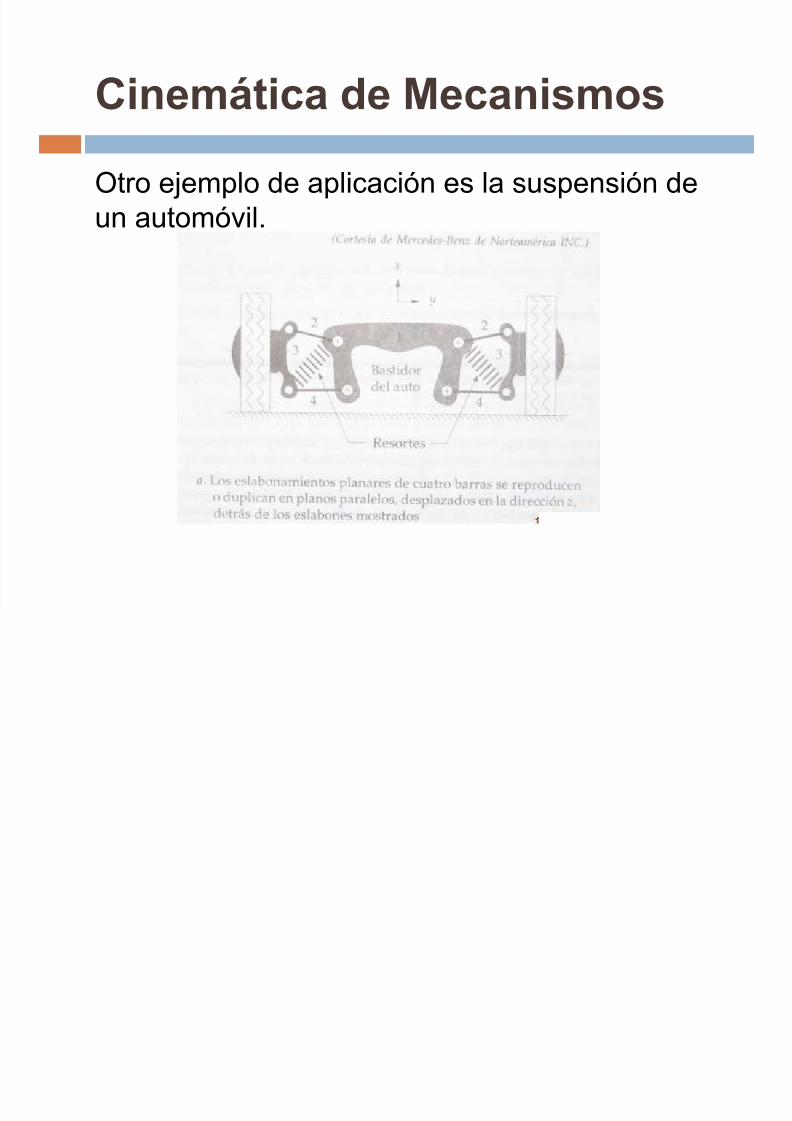
Otro ejemplo de aplicación es la suspensión de
un automóvil.