chavez cordova alex_algoritmo_ingreso_vehículos
TRANSCRIPT

TESIS PUCP
Esta obra ha sido publicada bajo la licencia Creative CommonsReconocimiento-No comercial-Compartir bajo la misma licencia 2.5 Perú.
Para ver una copia de dicha licencia, visitehttp://creativecommons.org/licenses/by-nc-sa/2.5/pe/

PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
FACULTAD DE CIENCIAS E INGENIERÍA
“ALGORITMO QUE PERMITE EL INGRESO DE VEHÍCULOS A UNA VÍA DE
ALTO TRÁFICO Y DOBLE SENTIDO, BASADO EN PROCESAMIENTO
DE IMÁGENES”
Tesis para optar el título de ingeniero electrónico
Presentado por: Alex Santos Chávez Córdova
Lima – Perú 2007

RESUMEN
Las intersecciones de tipo “T”, entre una avenida preferencial y una secundaria,
son en algunas ocasiones, zonas de congestionamiento vehicular. Esto sucede
cuando el flujo vehicular en la avenida preferencial es intenso, lo que provoca que
el ingreso de algún vehículo desde la vía secundaria sea bastante difícil y riesgoso.
Este trabajo de tesis, plantea como solución, un algoritmo basado en el
procesamiento de imágenes, que determine la ubicación, y orientación de los
vehículos que deseen ingresar a la avenida preferencial; y así, controlar
dispositivos de control de tráfico (semáforos), que faciliten este ingreso.
Para el desarrollo del algoritmo, se trabajó en la intersección entre la avenida Riva
Agüero y la salida vehicular de la Pontificia Universidad Católica del Perú. Se
construyó una maqueta a escala (1:50) de la zona de estudio, para facilitar las
simulaciones de diferentes situaciones. El algoritmo en mención cuenta con tres
etapas, una etapa de pre – procesamiento, en la que se ajustan la resolución y
formato (escala de grises) de las imágenes capturadas mediante una cámara de
video. Una etapa de procesamiento, la cual comprende diferentes rutinas, como
umbralización, aplicación de filtros, operaciones morfológicas, entre otras, con la
finalidad de obtener una imagen fácil de analizar. La última etapa es la de análisis,
se determina el número de vehículos presentes en la zona de estudio, la ubicación
y la orientación de los mismos. La interpretación de los datos obtenidos, permitirán
controlar correctamente los semáforos que faciliten el proceso antes descrito.

Los resultados obtenidos son muy acertados, tanto para la determinación del
número, y ubicación de vehículos, como en la determinación de la orientación. La
eficiencia alcanzada por el algoritmo trabajado en esta tesis, es de 94.5%. Por otra
parte, la velocidad de ejecución de todo el algoritmo varía entre 85 y 92
milisegundos, lo que permite trabajar con secuencias de imágenes de 10 cuadros
por segundo. La velocidad de muestreo de imágenes es apropiada, considerando
las bajas velocidades de los vehículos al ingresar a la zona de estudio.



ÍNDICE
INTRODUCCIÓN
CAPÍTULO 1: EL CONTROL DE FLUJO VEHICULAR EN LA CIUDAD DE LIMA
Y LA PROBLEMÁTICA ACTUAL EN LA UNIVERSIDAD CATÓLICA
1.1 Estado actual del tránsito vehicular 1
1.2 Problemática actual en la Universidad Católica 4
1.2.1 Identificación de variables que motivan el problema 5
1.2.2 Análisis del problema a partir de variables que influyen
en el proceso de salida de la universidad 6
1.3 Fundamentación de la importancia del problema 9
CAPÍTULO 2: SISTEMAS DE CONTROL DE TRÁNSITO MEDIANTE LA
CAPTURA DE IMÁGENES
2.1 Introducción 11
2.2 Tratamiento de imágenes 12
2.3 Visión artificial y la tecnología empleada
en el control, y monitoreo de flujo vehicular 14
2.4 Síntesis sobre el asunto de estudio 18
2.5 Conceptualizaciones generales 19
2.6 Modelo teórico 21

CAPÍTULO 3: DESCRIPCIÓN DEL ALGORITMO
3.1 Objetivo 24
3.2 Requerimientos 24
3.3 Consideraciones 25
3.4 Desarrollo 26
3.4.1 Etapa de pre-procesamiento 28
3.4.2 Etapa de procesamiento 29
3.4.3 Etapa de análisis 34
CAPÍTULO 4: SIMULACIÓN Y EVALUACIÓN DE RESULTADOS
4.1 Pruebas de simulación 44
4.2 Evaluación de resultados 64
4.2.1 Cálculo de la eficiencia 67
CONCLUSIONES 69
RECOMENDACIONES 72
FUENTES 73

INTRODUCCIÓN
Diferentes problemas de control de tráfico vehicular suceden en la ciudad de Lima,
estos problemas muchas veces ocurren debido a un mal estudio de la
problemática, y planteamientos de solución no eficaces. En otros casos el
problema se debe a la inexistencia de dispositivos de control del tránsito vehicular
en zonas de congestión, y la falta de educación vial tanto de los conductores como
de lo peatones.
Los malestares que causan estos problemas suelen ser, la larga espera de los
conductores y pasajeros, ante un congestionamiento originado en una vía de alto
tráfico, o la imprudencia de algunos conductores, que suelen terminar en
accidentes automovilísticos. Este trabajo de tesis centra su análisis en las
intersecciones tipo “T”, entre una vía preferencial y una secundaria (donde la vía
preferencial es de doble sentido), donde no se cuenta con dispositivos de control
de tráfico debido al bajo flujo vehicular en la vía secundaria. Esta tesis analiza
específicamente la intersección entre la salida vehicular de la Universidad Católica
y la avenida Riva Agüero.
Para el desarrollo de este algoritmo y la simulación del mismo, se cuenta con una
maqueta a escala (1:50) de la zona de análisis. La cual será bastante útil para la

simulación de distintas situaciones que se pueden presentar en la zona de estudio.
El algoritmo que se desarrolla en este trabajo, permitirá determinar la intención de
un vehículo para tomar un sentido de la avenida, al salir de la universidad. Esta
determinación se obtendrá a partir del análisis de datos como la ubicación,
dimensión, y orientación del vehículo. El algoritmo está basado en el
procesamiento de imágenes, recolectadas por una cámara de video ubicada
estratégicamente en la zona de análisis.

CAPÍTULO 1
EL CONTROL DE FLUJO VEHICULAR EN LA CIUDAD DE LIMA Y LA
PROBLEMÁTICA ACTUAL EN LA UNIVERSIDAD CATÓLICA
1.1 Estado actual del tránsito vehicular
La situación actual del tránsito vehicular en la ciudad de Lima, es un problema que
se debe al gran crecimiento del parque automotor desde hace varios años, en
especial, debido al incremento del número de transporte público. El problema
también se debe a las malas condiciones de regulación y control de tránsito que
atraviesa la ciudad. La falta de sistemas de regulación, el mal estado de los
dispositivos de control de tránsito, o la inexistencia de éstos, contribuyen a la
problemática actual. No se puede descartar tampoco la falta de educación vial de
la población; no se puede generalizar, pero se tiene que tomar en cuenta que
muchos de los problemas que ocurren en la actualidad, también se deben a este
importante factor. El incumplimiento de las reglas de tránsito, y la informalidad en
el proceso de la obtención de los permisos de conducir, afectan también a la
situación actual.
Los problemas en el control de flujo de vehicular, se ven reflejados en los
malestares que causan, como por ejemplo, la larga espera que tienen que hacer

los conductores y pasajeros, originado por el congestionamiento vehicular, y en el
número de accidentes de tránsito que se registran.
Las intersecciones tipo “T”, entre una vía preferencial de doble sentido y una
secundaria, son en algunos casos, zonas de congestionamiento, debido a que la
vía preferencial es de alto tráfico (durante todo el día, o solo en horas punta), y los
vehículos en la vía secundaria, pasan varios minutos sin poder acceder a ella. Esto
causa incomodidad en los usuarios de la vía secundaria, debido a la larga espera
que tienen que hacer, y al congestionamiento que se origina en esta vía. También
hay malestar para los usuarios de la vía preferencial, debido a la imprudencia de
algunos conductores de la vía secundaria. Estos intentan acceder a la preferencial,
haciendo maniobras peligrosas, atentando contra el bienestar de los usuarios de
ambas vías.
Este tipo de intersecciones tipo “T”, se ven también a las salidas de instituciones
de diferente índole, y el problema descrito en el párrafo anterior se repite en estos
casos. En las figuras que se muestran a continuación, se muestran 3 casos de
intersecciones tipo “T”, 2 de ellas corresponden a la salida de instituciones (una de
ellas a la salida del Hospital Naval, ubicada en la avenida Venezuela, y la otra a la
salida de la Pontificia Universidad Católica del Perú, ubicada en la avenida Riva
Agüero), y la tercera corresponde a la intersección entre la avenida Bolívar y la
calle Abraham Lincoln, ubicada en el distrito de Pueblo libre. Estos son sólo
algunos ejemplos, entre otros muchos en la ciudad.

Figura 1.1. (a) Imagen correspondiente a la intersección entre la salida del Hospital Naval y la avenida Venezuela. (b) Imagen correspondiente a la intersección entre la salida de la Universidad Católica y la avenida Riva Agüero. (c) Imagen correspondiente a la intersección entre la avenida Simón Bolívar y la calle Abraham Lincoln. Imágenes obtenidas con el software Google Earth.
(c) (a) (b)

1.2 Problemática actual en la Universidad Católica
Este trabajo de tesis centra su estudio, análisis, y objetivos, en la intersección entre
la salida vehicular de la Universidad Católica y la avenida Riva Agüero (observar
Figura 1.2). La salida de vehículos de la universidad, presenta un problema y un
riesgo para los conductores y peatones que transitan diaria o regularmente esta
zona. Aunque no es una situación constante, debido a que el congestionamiento
que se origina en esta zona, ocurre mayormente en la tarde y en la noche (horas
normales de salida del personal, como de estudiantes de la universidad); el
problema que se origina en la zona de estudio, causa los mismos malestares
mencionados en la sección anterior, como la larga espera, el congestionamiento en
la salida de la universidad, y la imprudencia de algunos conductores.
Zona de estudio
Figura 1.2. Mapa del campus universitario.

En la Figura 1.3 se observa con más claridad la zona de análisis, y se señala
específicamente donde ocurren los diferentes malestares que afectan tanto a los
conductores, como peatones que transitan la zona. Se debe tener en cuenta, que
hay una entrada peatonal en esta puerta de la universidad, por lo que existe un
riesgo latente para los peatones, ante las imprudencias de los conductores.
B
A
Figura 1.3. Intersección entre la avenida Riva Agüero y la salida vehicular de la Universidad Católica. El punto “A” es la zona de congestionamiento para los vehículos que salen de la universidad. El punto “B” es la zona de riesgo para los conductores de ambas vías.
1.2.1 Identificación de variables que motivan el problema
Denominaremos como proceso, a la acción de ingresar a una vía preferencial de
doble sentido, desde una vía secundaria, en una intersección tipo “T”. A
continuación se mencionan algunas variables que afectan de cierta manera al
proceso que se estudia, de una manera general.

1. La “hora punta”, es decir las horas en que el flujo vehicular es intenso, y
complica el proceso, lo que origina todos los problemas ya mencionados.
2. La falta de dispositivos de control de tránsito en este tipo de intersecciones,
donde el congestionamiento es realmente crítico, lo que conlleva a la
necesidad del recurso humano (policía de tránsito) para poder manejar la
situación cuando ésta se complica.
3. La falta de apoyo de las instituciones del estado encargadas de regular esta
situación, y el apoyo en general de las autoridades municipales, que también
forman parte importante de la situación actual del problema.
La tecnología es un aporte importante para la mejora del problema. Buscar el
apoyo económico de entidades públicas, o privadas, con el fin de poder manejar la
situación, usando correctamente con previo estudio, todas las herramientas
necesarias que la tecnología pueda brindar; es una solución que está siendo muy
usada en el mundo, especialmente por países desarrollados.
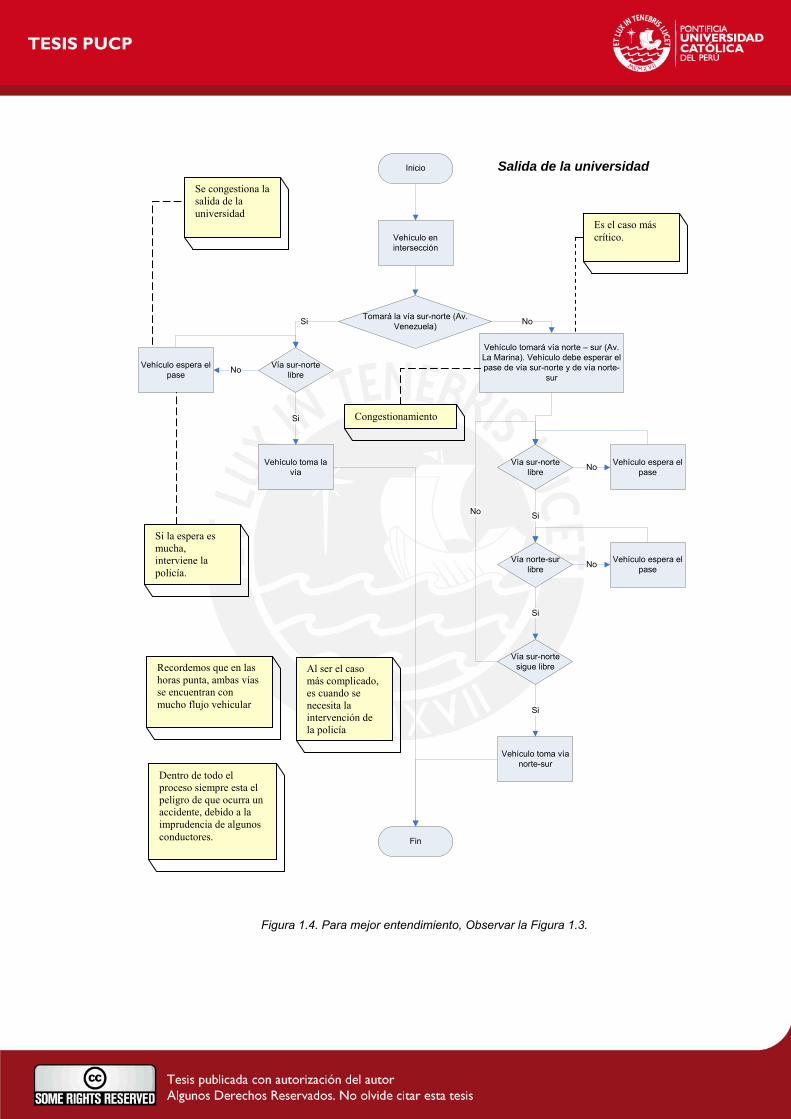
1.2.2 Análisis del problema a partir de variables que influyen en el proceso de
salida de la universidad
A partir de esta sección, denominaremos como proceso, a la acción de salir de la
Universidad Católica, por la avenida Riva Agüero (salida de automóviles). El
proceso se ve afectado por variables que influyen de manera directa en el
problema. Variables como el tiempo de espera, el flujo vehicular, la imprudencia de
algunos conductores, y la necesidad de la policía de tránsito en algunos casos.
Estas variables se pueden representar de manera más clara con el siguiente
diagrama de flujo (Figura 1.4), que resume todo el proceso de salida de la
universidad.
Se tiene que mencionar, que la intervención de la policía de tránsito en el proceso,
no es constante. En la puerta de la universidad en mención, durante las horas
punta, se cuenta con la presencia de uno o dos policías a lo más, quienes
intervienen en las situaciones críticas antes mencionadas. Al ser una institución
privada, la universidad esta fuera de la jurisdicción de la policía; por lo que el
contar con la intervención policial ante esta situación, constituye un gasto que hace
la universidad, para poder controlar el problema en estudio.
Inicio
Vehículo en intersección
Tomará la vía sur-norte (Av. Venezuela)
Vía sur-norte libre
Si
Vehículo espera el pase No
Vehículo toma la vía
Si
Vehículo tomará vía norte – sur (Av. La Marina). Vehículo debe esperar el pase de vía sur-norte y de vía norte-
sur
No
Vía sur-norte libre
Vehículo espera el paseNo
Vía norte-sur libre
Si
Vehículo espera el paseNo
Vía sur-norte sigue libre
Si
No
Vehículo toma vía norte-sur
Si
Fin
Salida de la universidad
Se congestiona la salida de la universidad
Es el caso más crítico.
Congestionamiento
Si la espera es mucha, interviene la policía.
Recordemos que en las horas punta, ambas vías se encuentran con mucho flujo vehicular
Al ser el caso más complicado, es cuando se necesita la intervención de la policía
Dentro de todo el proceso siempre esta el peligro de que ocurra un accidente, debido a la imprudencia de algunos conductores.
Figura 1.4. Para mejor entendimiento, Observar la Figura 1.3.

1.3 Fundamentación de la importancia del problema
El tránsito vehicular en la ciudad es un problema que aqueja a muchos, y es
importante prestarle atención, pues las cifras estadísticas referidas a accidentes de
tránsito son alarmantes. Las personas que conducen un vehículo y las que no lo
hacen, pero están frecuentemente en algún medio de transporte público, se
encuentran en peligro de sufrir un accidente de tránsito. Y es más, los peatones
también están expuestos al mismo peligro. Las cifras estadísticas de accidentes de
tránsito son aterradoras en la ciudad de Lima. Por ejemplo solo en el 2006 se han
registrado 54594 accidentes de tránsito entre fatales y no fatales, y se estima que
en el Perú hay 29 muertos por cada 10 mil vehículos [28]. En Europa esto es
diferente, pues se estima 2 muertos por cada 10 mil vehículos. Sin ir muy lejos en
Chile se estima 7 muertos por cada 10 mil vehículos. Como se puede apreciar, en
el Perú la realidad es muy grave, y aunque parte de este problema radica en el
parque automotor sobredimensionado, cabe recalcar que también hay mucha
responsabilidad en la falta de cultura y educación de los conductores como de los
peatones. De la cifra dada anteriormente de accidentes de tránsito en el 2006, el
25% de estos accidentes se debe a la imprudencia de los conductores, el 9% se
debe a la imprudencia de los peatones, 1.3% se debe al mal estado de las pistas, y
646 de estos accidentes se debió a una señalización defectuosa o inexistente [9]
[10].
Con la finalidad de reducir el número de accidentes de tránsito y su gravedad, las
autoridades respectivas vienen proponiendo diferentes métodos, o utilizando
diferentes dispositivos para regular esta situación. Pero la falta de un correcto
estudio del tránsito no solo no resuelve el problema, sino que hasta en algunos
casos empeora la situación.

La intersección entre la salida de la Universidad Católica y la avenida Riva Agüero,
constituye una zona de riesgo para los conductores y las personas que transitan en
esta zona. Pues las maniobras que hay que hacer para acceder a cualquiera de los
2 sentidos de la avenida, son complicadas, y se espera no lamentar algún
accidente en el futuro.

CAPÍTULO 2
SISTEMAS DE CONTROL Y MONITOREO DE TRÁNSITO VEHICULAR
MEDIANTE LA CAPTURA DE IMÁGENES
2.1 Introducción
Desde hace décadas, se está viendo un gran incremento en el flujo vehicular, y por
lo tanto se incrementa la necesidad de poder controlar esta situación. Por ejemplo
en la ciudad de Lima se pude percibir ésto de una manera muy fácil. Todos han
sufrido un malestar cuando se viaja en el sistema de transporte urbano, sea con
transporte público o con transporte privado, y casi siempre se termina fastidiado
con la situación del tráfico vehicular.
Esto también se percibe en grandes ciudades donde el tráfico es muy cargado,
tanto en países desarrollados como en países en vías de desarrollo. Así, en
algunos casos se ha recurrido al uso de la tecnología para poder controlar esta
situación, en varios casos se usan cámaras de video cerca de los semáforos, para
visualizar la situación en diferentes avenidas, calles, cruces, etc.
Todos los parámetros que se pueden capturar, van a una central de control de
tráfico, donde personas encargadas y conocedoras, manejan y controlan los
semáforos con el fin de mejorar la circulación del flujo vehicular. Este interesante

método se está dando en varios países como España, Estados Unidos, y sin ir tan
lejos, Chile, Brasil, Argentina y otros [25] [26] [27] [32].
En lugares donde no se cuenta con estos sistemas, se recurre a la policía de
tránsito, y muchas veces es tanta la demanda que no se pueden cubrir todas las
zonas críticas, por eso un sistema automático que pueda afrontar esta situación es
una buena idea.
En el presente documento se presentarán los avances actuales en el desarrollo de
sistemas electrónicos en el tratamiento de imágenes, y su relación con los
sistemas actuales de control de tránsito.
2.2 Tratamiento de imágenes
Se explicará algunos avances notorios en el tratamiento de imágenes a
continuación.
El procesamiento digital de imágenes es el conjunto de técnicas que se aplican a
las imágenes digitales con el objetivo de mejorar la calidad, o facilitar la búsqueda
de información. Los datos que componen una imagen digital pueden ser agrupados
en una matriz espacial. De esta forma se pueden aplicar operaciones matemáticas
propias del tratamiento de imágenes como son: la convolución, la transformada de
Fourier, u operaciones morfológicas como la erosión, dilatación, Apertura, Cierre,
residuo de erosión, o residuo de dilatación [15] [30]. Este es un pequeño resumen
de toda la teoría que abarca el procesamiento de imágenes.
Hasta hace relativamente poco, los sistemas de visión artificial sólo trabajaban con
imágenes estáticas, trabajaban con velocidades bajas y una cantidad de

información limitada. Pero ahora se puede procesar imágenes a velocidades muy
rápidas y mayores volúmenes de información, por eso se buscan algoritmos para
el procesamiento de secuencias de imágenes. Aunque esto es una tarea difícil en
el campo de la visión artificial, se busca recuperar en una secuencia de imágenes,
el flujo óptico, que es la velocidad aparente de la estructura de niveles de gris que
constituyen la imagen, así las variaciones en los niveles de gris puede ser debida
al movimiento de los objetos [14] [17]. Es así como podemos determinar el
movimiento de los objetos, aunque siempre hay una pérdida de información al
tratar de plasmar el mundo real en imágenes.
Otro de los avances en el tratamiento de imágenes, es el poder reconocer y
representar objetos en 3D de cualquier forma (free – forms). La idea es poder
acercarse lo más que se pueda a imitar la visión humana, lo cual trae consigo una
árdua tarea para el mundo de la visión computarizada. Es tan grande la variedad
de formas, que se comienza con una fase de representación, donde extrayendo
todas las características del objeto, siguiendo métodos muy avanzados, se
consigue hallar un modelo para el mismo. Luego se pasa a una fase de
reconocimiento, donde el objetivo es reconocer el objeto en cualquier posición o
escena en la que se encuentre, haciendo la comparación con el modelo obtenido.
En los últimos sistemas de reconocimiento de objetos, había limitaciones debido a
que los objetos que se podían representar, estaban limitados en sus formas. Con
el nuevo sistema de 3D que se viene trabajando, se tendrá una amplia gama de
objetos que se pueda reconocer. El gran desafío que trae consigo este sistema de
reconocimiento en 3D, es poder mejorar la representación de una manera más
elegante y precisa de los objetos, con el fin de obtener modelos casi idénticos a los
reales [1].

Estos avances expuestos anteriormente contribuyen para diferentes aplicaciones
en el campo de imágenes computarizadas. Por ejemplo hay un interés y demanda
que crece en el desarrollo de sistemas de vigilancias, en lugares públicos y en
privados, empleando CCTV (Wide – area – closed –circuit –television), un circuito
cerrado de televisión que permite tener una visualización constante de los lugares
que están bajo vigilancia.
Inglaterra es uno de los países con mayor población de CCTV, especialmente en
lugares públicos como por ejemplo en las redes de transporte público, y en lugares
privados. Todo esto, con la finalidad de poder controlar los actos criminales que no
escapan de la realidad inglesa. Esta red de cámaras requiere de un personal que
pueda monitorear y controlar toda la red, y el gran crecimiento de CCTV hace que
la demanda de personal crezca, y al no poder cubrir todo lo que implica esta
demanda, se afecta la efectividad del sistema [2] [3].
Con el continuo crecimiento de la tecnología los problemas de vigilancia pueden
ser tratados de manera profunda. La visión computarizada es una de estas
tecnologías, y para estos problemas se aplica el reconocimiento de rostros, de
objetos, el análisis del comportamiento humano, y la transmisión de video/audio
por cables o vía inalámbrico (wire or wireless). Junto a estos avances, se vienen
desarrollando nuevas aplicaciones en el campo de seguridad a través de la visión
computarizada [7].
2.3 Visión artificial y la tecnología empleada en el control y monitoreo de flujo
vehicular
Concerniente a la tecnología aplicada al control de tráfico; tenemos las siguientes
instituciones: ITS América (Intelligent transportation society of America), es un
sistema de los Estados Unidos que abarca todo lo referido a control,
comunicaciones inalámbricas o alambicas, y tecnologías electrónicas que se
enfoca al control, y mejoramiento del flujo de tránsito vehicular. Este sistema tiene
como objetivos, reducir la congestión vehicular, poder proponer diferentes
alternativas de rutas, salvar vidas y ahorrar tiempo y dinero. La ITS cuenta con
todas las herramientas necesarias para que el personal especializado en control de
tráfico, pueda colectar, analizar, y archivar datos del desarrollo del tráfico en
diferentes horas, como por ejemplo en la hora punta. Y con esta información poder
responder mejor ante diferentes incidentes que se puedan suscitar en el campo
[27].
Un ejemplo de aplicación realizada por la ITS, es la llamada ATMI (Advanced
Transportation Management / Advanced Traveler Information System), que es todo
un sistema que aporta información a los conductores para poder tomar mejores
decisiones de rutas. Es decir, con todo un sistema de sensores, cámaras (CCTV),
avisos de radio HAR system (Highway Advisory Radio) y otros dispositivos
electrónicos, se visualizan las diferentes vías rápidas, o pistas que están incluidas
en las zonas de congestión, y con paneles de mensajes CMS (Changeable
Message Signs) se le puede comunicar a los conductores, donde ocurre la
congestión, y que rutas alternas tomar. Este sistema lo provee la ITS para distintos
eventos de gran magnitud, como son conciertos, juegos de basketbol, béisbol, y
otros, donde la congestión vehicular crece notoriamente [22].
Para citar otro ejemplo, se tiene el centro de control de tráfico de Jerez (España),
similar a los sistemas existentes en los Estados Unidos. Jerez cuenta con una red
de cámaras en toda la ciudad, para poder visualizar y controlar el tráfico vehicular.
Su tecnología es muy avanzada respecto a otras ciudades, ellos cuentan con fibra
óptica para la regulación de los semáforos en tiempo real, lo que con otro tipo de
líneas de transmisión se demorarían casi 2 minutos. Toda esta información llega a
un centro de control, donde personal especializado, recibe todos los datos para

poder tomar mejores decisiones y descongestionar el tráfico que ocurre en la
ciudad [26].
En Chile se cuenta con la UOCT (Unidad Operativa de Control de Tránsito), un
organismo técnico dependiente del ministerio de transporte y telecomunicaciones
de ese país, cuya principal función es administrar eficientemente el flujo de tránsito
vehicular en la ciudad de Santiago. Este sistema permite coordinar y controlar toda
la red de semáforos instalados en la ciudad, usando una red de cámaras que
operan en tiempo real, transmitiendo información para el correcto control de los
semáforos, y para recolectar información valiosa para las estadísticas [25].
Para todos estos sistemas, se cuenta con sistemas cerrados de televisión, para
poder visualizar los cruces más conflictivos de las ciudades. La misión es poder
detectar congestiones y desde el centro de control poder programar los diferentes
semáforos para tratar de solucionar estos problemas. Además se cuenta con
letreros que también son controlados desde los centros de operación. Los datos de
los que dependen estos letreros también son tomados de la red de cámaras, y su
función es poder guiar a los conductores a tomar mejores decisiones en sus rutas,
y no congestionar más las vías que ya lo están.
En casos de emergencias, se puede controlar los semáforos para generar ondas
de luz verde por la ruta que cubre la zona de emergencia. También se cuenta con
un sistema de conteo de vehículos por visión computarizada. Consiste en un
software especial que puede ser asociado a cualquier monitor de televisión, y
mediante la definición de detectores virtuales, el sistema puede realizar conteos de
vehículos, medición de velocidades e incluso el manejo de intersecciones mediante
una interfaz especial [11] [12].

(a) (b)
(c)
Figura 2.1. (a) Centro de monitoreo y control de tráfico vehicular. (b) Imagen correspondiente a una vía de alto flujo vehicular. (c) Imagen nocturna de una avenida con poco flujo vehicular. Imágenes tomadas de las páginas Web: <www.itsa.org> y <www.uoct.cl/uoct/inicio.jsp>
Un ejemplo que la tecnología nos puede brindar en este tema, es lo que está
sucediendo en la actualidad en la universidad de Utrecht (Países Bajos), donde se
trabaja en un proyecto de semáforos inteligentes. La idea de este proyecto es tener
la capacidad de reducir el tiempo de espera que los vehículos tienen que hacer
cuando se encuentran ante la luz roja. Esto se puede hacer con la ayuda de
muchas variedades de sensores electrónicos, una de ellas puede ser la visión
computarizada. Trabajando en nuevos algoritmos para la programación de estos
semáforos, la idea es que en un cruce en forma de cruz, el semáforo tenga la
capacidad de tomar promedios de tiempos de espera de las 4 vías, y no dejar que
una de estas espere demasiado. La complejidad se ve cuando el semáforo tenga
que decidir en que vía tendrá que poner la luz roja y en cual la verde, esto en
función de la densidad del flujo de tránsito que se encuentran en las distintas vías.
Cabe recalcar que la función principal de estos semáforos es reducir el tiempo de
espera ante la luz roja, y hacerlo equitativo para las diferentes vías que incluye el
cruce [23].
Como se puede apreciar, hay un gran interés en el desarrollo de tecnología
aplicada al control del tráfico vehicular, es un tema que crece intensamente, y es
interés de muchos países y ciudades, que buscan el bienestar y aceptación total
de sus servicios.
2.4 Síntesis sobre el asunto de estudio
En la actualidad varias ciudades del mundo se están preocupando en brindar
mejores sistemas de control de tránsito vehicular. Esto debido al gran incremento
del parque automotor en los últimos años; y más aún en ciudades como Lima,
donde el parque automotor, los escasos recursos y la falta de educación vial hace
de la ciudad un verdadero caos.
Países como Brasil, Chile, España, Estados Unidos, y otros, cuentan con centrales
de control de tráfico vehicular, donde se puede visualizar las diversas zonas
críticas de las diferentes ciudades donde se cuenta con estos sistemas, y la
finalidad es descongestionar el flujo de vehículos. Y mejor aún prevenir a los
demás conductores sobre problemas que están ocurriendo, y poder guiarlos por
rutas alternas para llegar sin problemas a sus destinos.
Los sistemas de control de tráfico cuentan con diversos tipos de sensores
electrónicos para su funcionamiento, pero también cuentan con diversos

dispositivos para la prevención, y alerta al público en general. Se usan medios
como la radio, paneles electrónicos con avisos que cambian dependiendo de las
circunstancia del tráfico en tiempo real. Los semáforos están acompañados de
cámaras, que toman la información de la que dependerá la programación de los
mismos. También se cuenta con softwares especiales que con las imágenes
capturadas pueden contar los vehículos, medir velocidades, y hasta manejar
intersecciones. Los semáforos inteligentes tienen la capacidad de poder
programarse automáticamente, para mejorar el flujo vehicular y poder favorecer a
los conductores, impidiendo la pérdida de tiempo ante una larga duración de la luz
roja.
Estos sistemas son el futuro en el control del tráfico vehicular, y los avances vienen
creciendo y mejorando para su consolidación. Se busca no solo el poder manejar
problemas en tiempo real sino también poder prevenir y ayudar a los conductores a
tomar mejores rutas para su destino final. La visión artificial es una gran
herramienta para estos fines.
2.5 Conceptualizaciones generales
• Imagen digital: Una imagen digital es una matriz de números que representan
valores de iluminación en puntos regularmente espaciados de la imagen de
una escena.
• Tratamiento de imágenes: Se define así, como el procesamiento de los datos
que comprenden una imagen.
• Píxel: El píxel (del inglés picture element, o sea, "elemento de la imagen") es la
menor unidad en la que se descompone una imagen digital, ya sea una
fotografía, un fotograma de video o un gráfico.
• Operaciones morfológicas: Son operaciones matemáticas sobre un píxel
teniendo en cuenta los píxeles vecinos.

• Dilatación: La dilatación, es la primera de las dos operaciones básicas de la
morfología matemática. Consiste en tomar cada píxel de la imagen (con valor
“1”) y setear al valor “1” todos aquellos píxeles pertenecientes al fondo
(background) que tienen una conectividad con el píxel del objeto. En pocas
palabras, poner a “1” los píxeles del fondo vecinos a los píxeles del objeto
• Erosión: Segunda operación básica de la morfología matemática. Consiste en
tomar cada píxel del objeto que tiene una conectividad con los píxeles del
fondo (background) y resetearlo al valor “0”. En otras palabras, poner a “0” los
píxeles del objeto vecinos a los píxeles del fondo.
• Visión artificial: La visión artificial, también conocida como Visión por
Computador del inglés “Computer Vision”, es un sub-campo de la inteligencia
artificial. El propósito de la visión artificial es programar un computador para
que "entienda" una escena o las características de una imagen.
• Niveles de Gris: Se denomina así a los valores de iluminación de los píxeles
que conforman una imagen.
• Umbralización: Se basa en seleccionar un nivel de gris (umbral) por debajo
del cual consideraremos los píxeles pertenecientes a los objetos, y por encima
pertenecientes al fondo. Es muy utilizado en problemas en los que las
condiciones luminosas están controladas.
• Histograma: Un histograma es un resumen gráfico de la variación de un
conjunto de datos. La naturaleza gráfica del histograma nos permite ver pautas
que son difíciles de observar en una simple tabla numérica.
• CCTV: (Wide – area – closed –circuit –television) Es un circuito cerrado de
televisión que usa cámaras, que captura diferentes imágenes y las transmite a
un receptor que en lo general son monitores que nos permiten visualizar lo que
las cámaras capturan.

• ITS: Sistema inteligente de transporte, cuenta con todo un sistema de
tecnología electrónica, para el control y manejo del flujo de transito, para
reducir la congestión y para ofrecer rutas alternas a los conductores.
• ATMI: Sistema administrativo e informativo de transporte avanzado de la
ciudad de “Valey” en San Diego - Estados Unidos. Brinda toda la información
necesaria con respecto al tráfico de la ciudad.
• HAR system: Sistema de radio para conductores en las vías rápidas, que es
usado frecuentemente por la policía de los Estados Unidos, para avisar a los
conductores sobre congestiones vehiculares.
• CMS: Son paneles de mensajes y signos variables en el tiempo, que cumplen
una función similar a el HAR system.
• UOCT: Unidad operativa de control de tránsito de la ciudad de Santiago de
Chile, cumple la función de controlar y manejar el flujo de tránsito de esta
ciudad, es el análogo de la ITS.
2.6 Modelo teórico
Para la zona de estudio y análisis, la intersección entre la salida de la Universidad
Católica y la avenida Riva Agüero (Figura 1.3), la visión artificial será la
herramienta fundamental para el desarrollo de este trabajo de tesis. Imágenes en
escala de grises serán recolectadas mediante una cámara de video en la zona de
estudio. Estas imágenes serán procesadas por el algoritmo que se propone en
este trabajo como tema de desarrollo; el cual proporcionará los datos necesarios
para poder manejar el proceso de manera automática (controlando semáforos por
ejemplo).
El procesamiento de imágenes, permitirá determinar el posicionamiento de los
vehículos en la intersección en mención, las dimensiones de estos, y la orientación
de los mismos. Con estos datos, podemos anticipar las intenciones de los
conductores al tomar uno de los 2 sentidos de la avenida; y así, agilizar el acceso
de los vehículos a ésta, minimizando los malestares ya explicados. A parte se
podría llevar un conteo de los vehículos que salen de la universidad a diferentes
horas del día, con un fin estadístico.
A continuación se muestra en la Figura 2.2, la representación gráfica del modelo
teórico.
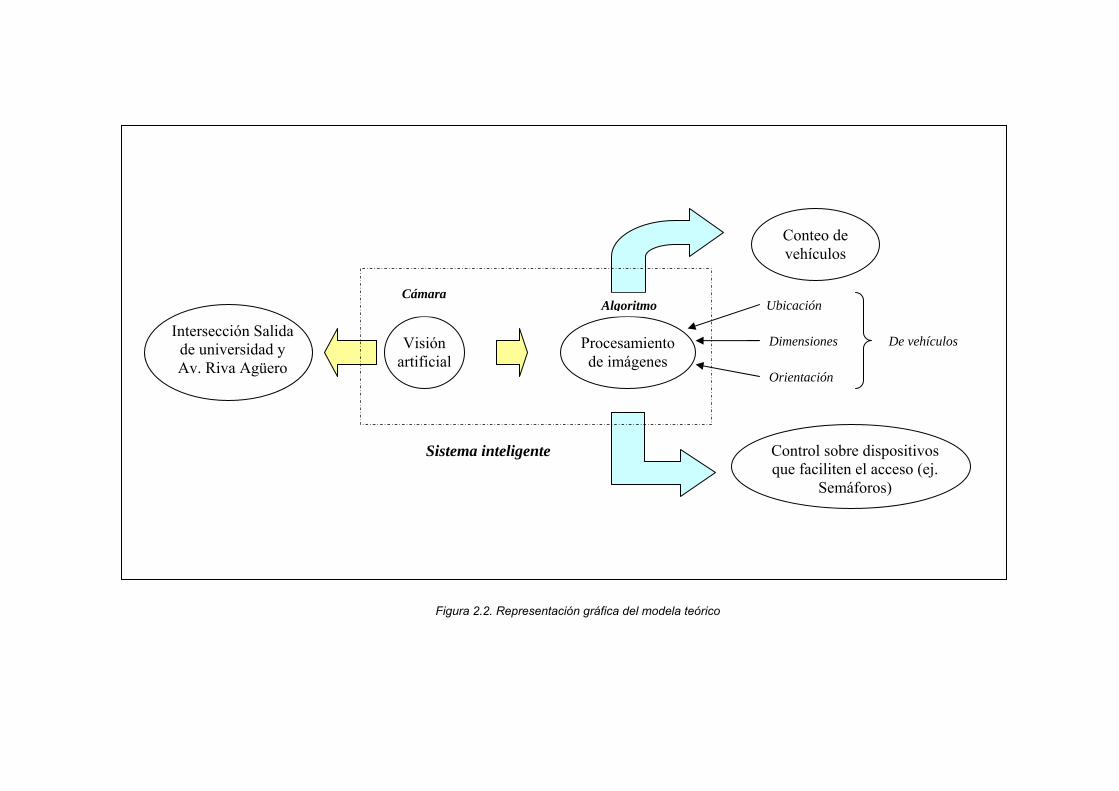
Figura 2.2. Representación gráfica del modela teórico
Intersección Salida de universidad y Av. Riva Agüero
Visión artificial
Procesamiento de imágenes
Conteo de vehículos
Sistema inteligente Control sobre dispositivos que faciliten el acceso (ej.
Semáforos)
De vehículos
Orientación
Dimensiones
Ubicación AlgoritmoCámara

CAPÍTULO 3
DESCRIPCIÓN DEL ALGORITMO
3.1 Objetivo
El objetivo principal de este algoritmo, es determinar la presencia, ubicación y
orientación de los vehículos que desean ingresar a una avenida de alto tráfico y
doble sentido, desde una vía secundaria en una intersección de tipo “T” (ver Figura
1.1). Es decir, predecir a cual de los 2 sentidos de la avenida, el vehículo desea
acceder; esto permitiría tener un control automático sobre semáforos, que faciliten
el acceso a la avenida, previniendo el congestionamiento, malestares, y sobre todo
accidentes en la zona de estudio.
Una intersección tipo “T” se presenta en la intersección entre la avenida Riva
Agüero y la salida de la Universidad Católica. Este trabajo de tesis dirige los
objetivos planteados a la intersección mencionada.
3.2 Requerimientos (Elementos utilizados)
• Una computadora personal, Pentium IV, 512MB de memoria RAM como
mínimo, y sistema operativo Linux.
• Programa VIP4L “Video and image processing for Linux”, desarrollado en
lenguaje C, elaborado por el grupo GPDSI de la Pontificia universidad Católica
del Perú.
• Cámara analógica de video NTSC SONY, modelo CCD – TR940.
• Una maqueta de la zona de estudio y análisis en escala 1:50.
• Vehículos a escala.
Se utiliza el sistema operativo Linux, ya que es un software libre, muy popular entre
muchos programadores y desarrolladores, incorpora una gama de sistemas de
interfaz gráfica (ventanas), de igual o mejor calidad que otras ofrecidas en muchos
otros paquetes comerciales. Utiliza varios formatos de imagen que son compatibles
con casi todos los sistemas operacionales utilizados en la actualidad (JPG, BMP,
GIF). Se usa el programa VIP4L versión 1.0, un programa diseñado para el
procesamiento y análisis de imágenes y video, elaborado por el grupo GPDSI de la
Universidad Católica. Este software cuenta con varias herramientas que ayudarán
al desarrollo del algoritmo en estudio. El programa está desarrollado en lenguaje C,
lo cual permite con facilidad la modificación, y creación de nuevas funciones, para
alcanzar con éxito los objetivos trazados.
3.3 Consideraciones
Se deben tener en cuenta las siguientes consideraciones para el desarrollo del
algoritmo:
• Todas las pruebas y diferentes simulaciones se realizaron con la maqueta
expuesta a luz natural, durante el día y la tarde, no se ha trabajado con luz
artificial.
• No se ha trabajado con vehículos a escala que sean réplicas de camiones,
ómnibus, o motos. Todos los vehículos son modelo sedán.
• Los colores de los automóviles son claros. No se ha trabajado con colores
oscuros, ya que en la escala de grises, los vehículos de color oscuro, son
difíciles de rescatar con la umbralización (se confunden con el color de la
pista).
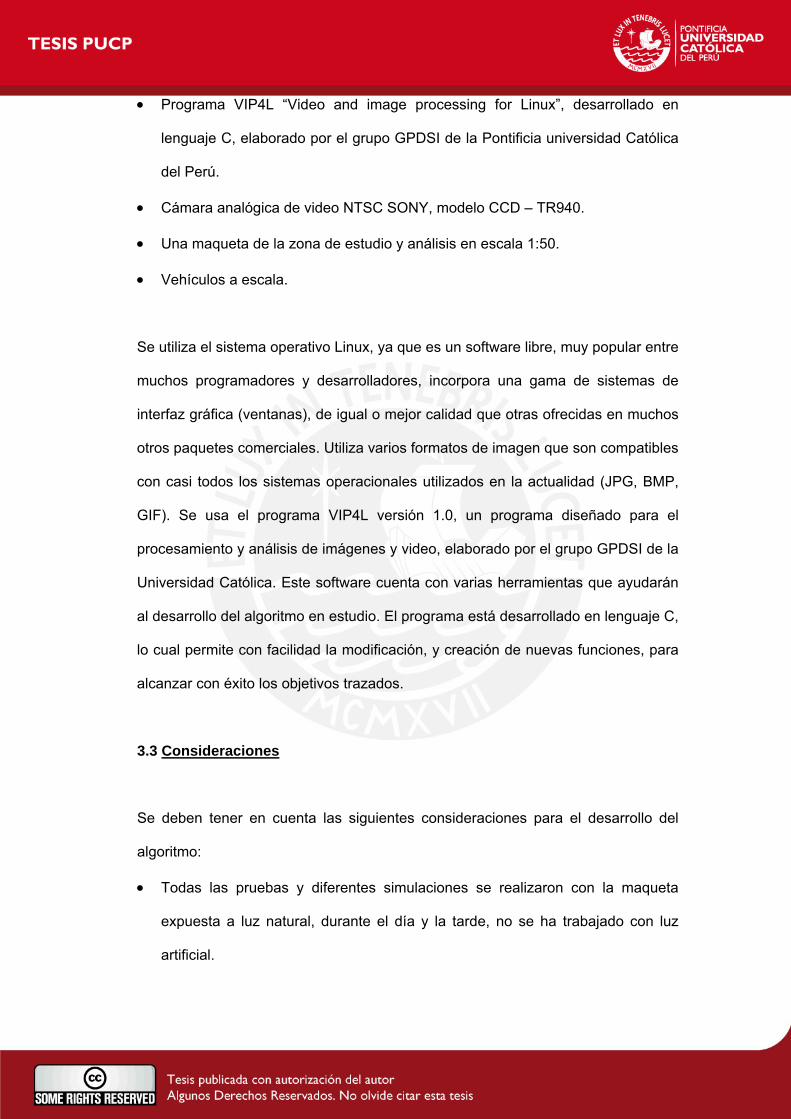
• La disposición de la cámara se puede apreciar a partir de la Figura 3.1 y 3.3.
La escala de la maqueta y de los vehículos es de 1:50, conservando esta
escala, la cámara está ubicada a una altura de 0.35 m y con un ángulo de 85°
con respecto a la horizontal, aproximadamente.
85°
0.35 m
Figura 3.1. Disposición de la cámara de video con respecto a la superficie de la maqueta.
3.4 Desarrollo
Para poder tener acceso de una manera cómoda y económica a la zona de estudio
(intersección entre avenida Riva Agüero y la Universidad Católica), se decidió
construir una maqueta de la zona de análisis en una escala de 1:50. Esta maqueta
será una herramienta fundamental en el desarrollo de este trabajo de tesis.

En las figuras a continuación se muestra la maqueta en mención, la zona
específica de análisis, y una disposición de vehículos en ella.
Avenida Riva Agüero Norte Sur
Figura 3.2. Se muestra la maqueta en escala 1:50 de la zona de estudio. El sentido hacia el norte es hacia la avenida Venezuela, y el sentido hacia el sur es hacia la avenida La Marina.
Figura 3.3. Se muestra la zona específica de análisis, intersección de la avenida Riva Agüero con la salida de la universidad Católica. Así mismo esta será disposición de la cámara que capturará las imágenes.
Figura 3.4. Se muestra la disposición de los vehículos en la zona de análisis, esta es la forma convencional de dos vehículos en la intersección, el de arriba con orientación hacia la avenida La Marina y el de abajo con orientación a la avenida Venezuela.

El desarrollo del algoritmo está dividido en tres etapas las cuales se irán
desarrollando en este capítulo. La primera etapa es la de pre-procesamiento, en la
cual se convierte la imagen de colores a escala de grises, y también se ajusta la
resolución de la imagen. La segunda etapa es la de procesamiento, en la cual se
aplica todas las herramientas propias del procesamiento de imágenes, como
operaciones morfológicas, umbralización, etc. Y la última etapa es la de análisis,
en la cual se analiza las imágenes para determinar ubicación, dimensión, y
orientación.
3.4.1 Etapa de pre-procesamiento
En esta etapa, se extrae el plano rojo a la imagen de colores (la imagen a colores
está comprendida por los planos rojo, azul, y verde), para luego convertirla a
escala de grises. La finalidad de este primer paso es resaltar la diferencia entre los
niveles de grises de los vehículos, y los de la pista. Esta diferencia es importante
para la umbralización en la etapa de procesamiento (se escogió eliminar el plano
rojo después de varias pruebas con diferentes imágenes). El siguiente paso es
ajustar la resolución de la imagen con la que se trabajará, que es de 320 píxeles
de ancho por 240 píxeles de alto (La cámara de video captura imágenes con una
resolución de 640 por 480 píxeles). Esto es muy importante, ya que para la etapa
de análisis, la determinación de la ubicación como de las dimensiones del
vehículo, se ve afectada directamente por este factor.
Figura 3.5. Se muestra la imagen de la zona de estudio en escala de grises. La resolución es de 320 por 240 píxeles.
3.4.2 Etapa de procesamiento
En esta etapa, se aplica diferentes herramientas propias al procesamiento de
imágenes, con el fin de obtener una imagen simple, sobre la cual se podrá aplicar
el análisis, y obtener los datos necesarios para alcanzar el objetivo de este trabajo
de tesis.
El primer paso en esta etapa es eliminar, o en su defecto, opacar todo aquello que
esté presente en la imagen, que no sea de interés. Para este fin, se calcula el valor
absoluto de la resta entre la imagen base (imagen almacenada en memoria de la
zona de análisis sin ningún vehículo); y la imagen en tiempo real que se captura
con la cámara. Al ser imágenes en escala de grises, se tienen valores que van
desde 0 a 255 en la matriz de píxeles, donde 0 se refiere al color negro, y 255 al
color blanco. En las zonas en que las imágenes tengan los mismos valores de
iluminación, el resultado de la resta de matrices será 0, y se mostrarán las zonas

implicadas de color negro. El valor absoluto de la resta evitará los valores
negativos.
(a). Matriz A (b). Matriz B
(c). | Matriz A – Matriz B |
Figura 3.6. (a) Imagen base de la zona de estudio. (b) Imagen capturada por la cámara de video. (c) Valor absoluto de la resta (b)-(a).
El segundo paso de esta etapa, es la umbralización, y para escoger el correcto
valor umbral, se analizaron las imágenes con ayuda de histogramas.
Figura 3.7. Izquierda.- Valor absoluto de la resta de imágenes. Derecha.- Histograma de la zona indicada.

El programa VIP4L cuenta con una herramienta para mostrar el histograma de
imágenes completas o parte de éstas. Analizando el histograma de la sección
señalada en la Figura 3.7, se observa que los valores en escala de grises más
altos, correspondiente a los vehículos, están por encima de 55; por lo tanto, para
este caso el valor umbral correcto sería 55. Haciendo pruebas con diferentes
imágenes, todas tomadas a la luz del día (ver consideraciones, sección 3.3), se
determinó el valor umbral utilizado en el algoritmo, en 65. Este valor umbral es fijo,
y se mantiene para todas las pruebas simuladas en este trabajo de tesis, dado que
la iluminación no varía notoriamente. El resultado de la umbralización se muestra
en la Figura 3.8.
Figura 3.8. Resultado de la umbralización.
De la zona de análisis, solo una parte es la que interesa, la parte donde los
vehículos esperan el pase hacia la avenida. Todo lo demás se elimina con una
máscara que se aplica a la imagen, para facilitar el trabajo (Figura 3.9). Por esta
razón, en el paso anterior, se aplica el histograma sólo a la sección señalada en la
Figura 3.7. Para eliminar el ruido que aparece después de la umbralización, se
aplica un filtro mediana (Figura 3.10). El más mínimo movimiento de la cámara,
hace que la resta de imágenes genere este ruido (viento, vibraciones, etc.).

Figura 3.9. Izquierda.- Imagen umbralizada. Derecha.- Imagen enmascarada.
Figura 3.10. Izquierda.- Imagen enmascarada. Derecha.- Imagen después de aplicar el filtro mediana.
La función del filtro mediana, es hacer un barrido sobre toda la imagen, y a cada
píxel, con sus vecinos (matriz de 3 x 3) los ordena en un vector de 9 elementos en
forma ascendente, escogiendo el elemento central del vector, y colocándolo en la
posición del píxel donde se inició el proceso.
El siguiente y último paso de la etapa de procesamiento, es aplicar las operaciones
morfológicas. Las operaciones que se realizan son la dilatación, y una llamada
“llenado de agujeros” (fill holes), cuya función es llenar los espacios de color negro
dentro de las regiones de píxeles blancos. Se aplica la dilatación para expandir el
área correspondiente a los vehículos, y formar un solo bloque de píxeles blancos
por automóvil, el llenado de agujeros, ayuda a la dilatación, con el fin de no
deformar mucho los bloques formados.

Así termina la etapa de procesamiento, con una imagen simple, fácil de analizar
(Figura 3.13). En este ejemplo, se aprecian 2 vehículos ubicados en la zona de
análisis, el procesamiento funciona de igual manera para imágenes con un solo
vehículo. En el próximo capítulo se verán diferentes situaciones.
Figura 3.11. Izquierda.- Imagen después de aplicar el filtro mediana.
Derecha.- Imagen dilatada.
Figura 3.12. Izquierda.- Imagen dilatada. Derecha.- Imagen después de aplicar la rutina fill holes.
Figura 3.13. Izquierda.- Imagen final de la etapa de pre-procesamiento. Derecha.- Imagen final de la etapa de procesamiento.

3.4.3 Etapa de análisis
El análisis es la etapa final del algoritmo, el objetivo de esta etapa es determinar el
número de vehículos en la zona de estudio, la ubicación de los mismos, sus
dimensiones (para poder descartar la presencia de otros objetos que perjudiquen
el resultado), y lo más importante, la orientación de los vehículos.
El primer paso de esta etapa es la segmentación basada en regiones, se denomina
regiones a los bloques de píxeles blancos que representan a los automóviles. El
programa VIP4L, cuenta con una función para esta segmentación. La función hace
un conteo de las regiones presentes en la imagen, por cada región realiza un
análisis, y se obtienen los siguientes datos: número de píxeles que abarca la
región, posición del centro de masa, color, coordenadas mínima y máxima de
píxeles de cada región tanto en el eje “x” como “y”, las coordenadas iniciales donde
se reconoció la región, y el nuevo color que se le asigna. En la siguiente figura se
muestra el resultado de la segmentación, aplicada a la imagen final de la etapa de
procesamiento.
(a)

Número de región
Número de
píxeles Centro de masa
Posición del primer píxel encontrado de
la región
Posición mínima y máxima de la región
en el eje “x”
Posición mínima y máxima de la región
en el eje “y”
(b)
Figura 3.14. (a) Imagen final de la etapa de procesamiento. (b) Resultado de la segmentación en la etapa de análisis.
La función segmentación comienza haciendo un barrido de la imagen desde la
posición (0,0); por lo que el orden en el que se enumeran las regiones en el
resultado es en forma ascendente, de izquierda a derecha y de arriba hacia abajo.
Con el ejemplo mostrado, la región “1” corresponde al vehículo que esta arriba
(para todas las demás simulaciones este orden se conserva).
Con el resultado obtenido de la segmentación, se obtiene el número de regiones,
en este caso 2, y se procede a continuación a confirmar el correcto
posicionamiento de las regiones. En la Figura 3.15 se muestra la zona, donde
deben estar ubicados los centros de masa de las regiones, para seguir con los
siguientes pasos.

Figura 3.15. Se muestra la zona donde deben estar ubicados los centros de masa de las regiones encontradas, para poder continuar con el siguiente paso. De no ser así, el algoritmo arroja como resultado, que no hay vehículos.
La resolución de la imagen es de 320 píxeles de ancho por 240 píxeles de alto, y la
zona específica que se analiza en este paso, esta comprendida por los píxeles que
están dentro de las siguientes coordenadas: xi = 140; xf = 220; yi = 75; yf = 200.
Se continúa con los siguientes pasos, solo si se encuentra que los centros de
masa de las regiones encontradas, están en la zona indicada.
Después de haber confirmado la presencia de regiones en la zona de análisis, se
procede a descartar la presencia de otros objetos que no sean vehículos, esto se
logra analizando las dimensiones de las regiones. El resultado de la segmentación
arroja el número de píxeles que abarca cada región. Con estos datos y con las
distintas pruebas realizadas en este trabajo de tesis se determinó que el número
de píxeles mínimo para considerar la región como un automóvil sea 2100 píxeles.
Para el ejemplo de demostración en mención, el resultado en esta etapa de
análisis es como se muestra en la figura.

Figura 3.16. Se muestra en la figura los primeros resultados del algoritmo, como se puede observar el número de regiones es 2, y se reconoce dos vehículos. Observe los datos correspondientes al centro de masa y el número de píxeles.
El segundo paso y el último de esta etapa de análisis, es la de encontrar la
orientación de los vehículos, lo cual permitirá predecir el sentido de la avenida que
el vehículo tomará. Para determinar la orientación de los vehículos, se utilizó el
concepto del momento de inercia.
Refiriendo el momento de inercia a un eje de referencia, la expresión analítica es:
∑=
=n
iiirm
1
2μ (3.1)
µ: Momento de inercia mi: Masa del punto “i” ri: Radio vector del punto “i” con respecto al eje considerado.
Si se tienen infinitos puntos, las sumatorias se convierten en integrales, y al
trabajar con densidades constantes igual a la unidad, la medida de la masa de una
forma se convierte en una medición de área. El momento de inercia puede
generalizarse para cualquier orden. En este trabajo de tesis se analizan regiones

en dos dimensiones, y los momentos de orden pq quedan definidos con la
siguiente expresión:
( ) ( )∫ −−= dxdyyxgYyXx qn
pmqp ),(,μ (3.2)
La integración incluye el área del objeto, esta expresión tiene como eje de
referencia al centro de masa de la región (Xm, Yn), estos momentos son
frecuentemente llamados momentos centrales. Para el dominio discreto, el cálculo
de momentos de orden pq se reduce a la fórmula:
(3.3) ( ) ( ) ( ) FormanmYyXx qn
pmqp ∈−−= ∑∑ ,;,μ
La orientación de la región en análisis, esta definido como el ángulo “φ” entre el eje
de las abscisas, y el eje sobre el cual la región puede ser rotada con mínima
inercia (la región es mas prolongada en esta dirección). Para hallar el valor del
ángulo, el momento de inercia debe ser derivado con respecto a “φ” e igualado a
cero (momento mínimo).
Centro de masa
x’
x
y
φ
y’
(x, y) .D
Figura 3.17. Se muestra una región cualquiera ubicada en el plano xy, y el eje para el cual el momento de inercia es mínimo.

De la figura anterior, el momento de inercia de la forma con respecto al eje x’, en
función de φ es:
( )∑∑= D ϕμ 2 (3.4) x y
( ) ( ) ( )[ ]22 sincos ϕϕϕ mn XxYyD −−−= (3.5)
Derivando la ecuación (3.4) con respecto a φ, e igualando la expresión a cero, se
resuelve la ecuación trigonométrica, obteniendo así el valor del ángulo φ [33].
( ) 02 =∂∂
=∂∂ ∑∑
x y
D ϕϕϕ
μ
( ) ( ) ( )[ ] ( )( ) 02cos22sin222 =−−−−−−=
∂∂ ϕϕϕϕ nmnm YyXxYyXxD
( )( )( ) ( )∑∑
∑∑−−−
−−= 22
2arctan
21
nm
nm
YyXx
YyXxϕ
Usando la ecuación (3.3), el cálculo de φ se reduce a resolver la siguiente
ecuación:
2,00,2
1,12arctan
21
μμμ
ϕ−
= (3.6)
El algoritmo cuenta con una función denominada “orientación”, la cual realiza el
cálculo del ángulo φ, que forma el eje horizontal de la matriz de píxeles, con el eje
de la región para el cual el momento de inercia es mínimo. Este cálculo se realiza
por región, y aquí reside la importancia de la función segmentación; cada región
esta enumerada, se sabe qué regiones corresponden a los vehículos, y también se
sabe en qué posición están ubicados los centros de masa. Con estos datos, la

función orientación hace un barrido de toda la imagen, y por cada región
correspondiente a un vehículo realiza el cálculo de su orientación, resolviendo las
ecuaciones (3.3) y (3.6). La función orientación, arroja como resultado un ángulo
positivo o negativo, en la Figura 3.18 se muestra los 2 casos.
x
y
φ<0
φ>0
Figura 3.18. Se muestra los ejes de referencia “x” e “y”, y los casos en que φ es positivo y negativo.
En la Figura 3.19 se muestra el resultado de las etapas anteriores, mientras que en
la Figura 3.20 se muestra el resultado de la función orientación al ejemplo que se
viene tratando en este capítulo.
Sur
Norte
Figura 3.19. Arriba.- Imagen resultante de la etapa de pre-procesamiento.
Abajo.- Imagen resultante de la etapa de procesamiento.

y
y
x
x
(a) (b)
(c)
Figura 3.20. (a) y (b) Se muestran las regiones correspondientes a los vehículos, y los ejes de referencia, así se puede apreciar la orientación de los vehículos. (c) Se muestra el resultado final de todo el algoritmo, se puede apreciar el resultado de la función segmentación y la función orientación.
Se ha conseguido el objetivo principal de este algoritmo, determinar la ubicación de
vehículos en la zona de análisis y la orientación de los mismos. La interpretación
de estos datos, sería la continuación de este trabajo de tesis. Esto se puede
explicar de la siguiente manera: Si un vehículo esta ubicado en la mitad superior
de la zona específica de estudio (ver Figura 3.19), tiene bastante probabilidad de

tomar el sentido norte – sur; para mejorar esta probabilidad, se utilizaría el dato de
la orientación. Si un vehículo esta ubicado en la mitad inferior de la zona específica
de estudio (ver Figura 3.19), no se puede afirmar nada, hasta interpretar el dato de
orientación. En este trabajo de tesis, después de muchas pruebas, se considera
que el vehículo tomará el sentido sur – norte, si el ángulo de orientación es menor
a -16 grados, de lo contrario se considera que el vehículo tomará el sentido norte –
sur. La visión general que se tiene, es contar con un sistema inteligente, que
controle uno o dos semáforos, ubicados estratégicamente en la zona de estudio,
que facilite el proceso que se viene tratando en esta tesis. Este sistema tendría
como elemento principal el algoritmo trabajado.

Se determina el número de vehículos presentes en la imagen, su posición y la orientación de los mismos.
Procesamiento Análisis
Orientación
Segmentación
Fill holes
Resta de imágenes
Enmascaramiento
Dilatación
Filtro mediana
Umbralización
REPRESENTACION GRAFICA DEL PROCESO
Se aplica diferentes operaciones morfológicas, y otras rutinas propias del procesamiento de imágenes, con el fin de obtener una imagen simple, sobre la cual se puede aplicar la etapa de análisis.
Figura 3.21
Pre-procesamiento
Se ajusta la imagen a escala de grises, y la resolución de la imagen con la que se trabajará, que es de 320 x 240 píxeles.
Señal proveniente de la cámara.
Para todos los casos mostrados, la imagen base con la que se realiza la resta de
imágenes, es la misma, y se encuentra almacenada en la memoria del
computador.
Se muestra a continuación diferentes pruebas del proceso que se viene
estudiando, con diferentes vehículos y en distinta disposición. Teniendo en cuenta
las consideraciones nombradas en la sección 3.3, se muestran los resultados
obtenidos.
4.1 Pruebas de simulación
SIMULACIÓN Y EVALUACIÓN DE RESULTADOS
Figura 4.1. Imagen base de la zona de estudio.
CAPÍTULO 4

(d) (e) (f) (g)
Figura 4.2. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Histograma aplicado a la zona señalada en (b). (d) Imagen umbralizada. (e) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana. (g) Imagen final de la etapa de procesamiento.
(c) (a) (b)
PRUEBA Nº 1

El resultado del algoritmo identifica un vehículo, ubicado en la parte superior de la
zona específica de análisis. Aparecen en el resultado otras 2 regiones, las cuales
son descartadas del análisis, pues el número de píxeles que comprenden las
regiones, están fuera del rango determinado, así como sus centros de masa. La
presencia de estas pequeñas regiones, se debe al ruido producido por la resta de
imágenes. El algoritmo determina una inclinación del vehículo de -15 grados, se
podría interpretar este resultado, afirmando que el vehículo tomará el sentido norte
– sur de la avenida (ver figura 3.19).
Figura 4.2. (h) Se puede apreciar la inclinación del vehículo y compararlo con el resultado final. (i) Resultado final del algoritmo.
reg 1 n 2147 x 172 y 101 color 255 0 0 newcolor 254 xini 144 yini 79 xmin 143 xmax 202 ymin 79 ymax 122 reg 2 n 143 x 137 y 131 color 255 0 0 newcolor 253 xini 130 yini 127 xmin 130 xmax 144 ymin 127 ymax 136 reg 3 n 98 x 206 y 167 color 255 0 0 newcolor 252 xini 206 yini 163 xmin 199 xmax 212 ymin 163 ymax 171 Numero de regiones: 3 HAY VEHICULO ARRIBA Angulo de inclinación: -15.565467 grados
y
(i)
(h)
x
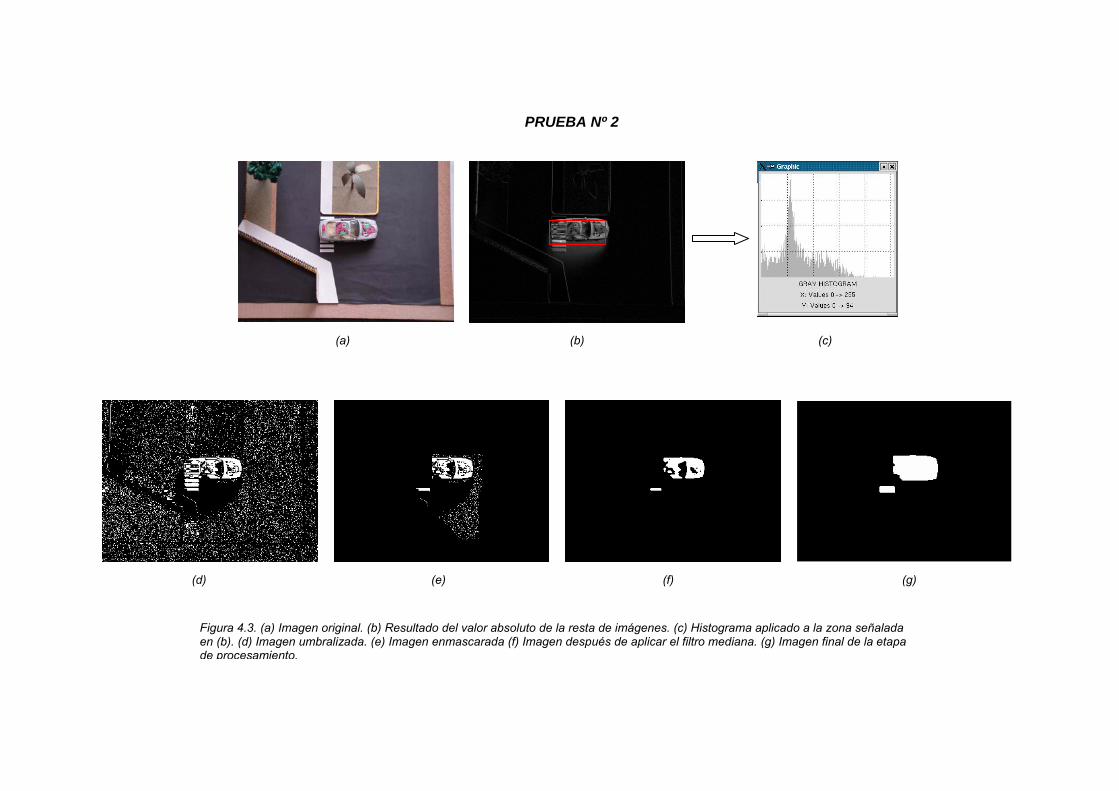
Figura 4.3. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Histograma aplicado a la zona señalada en (b). (d) Imagen umbralizada. (e) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana. (g) Imagen final de la etapa de procesamiento.
(g)
(c) (a) (b)
(d) (e) (f)
PRUEBA Nº 2
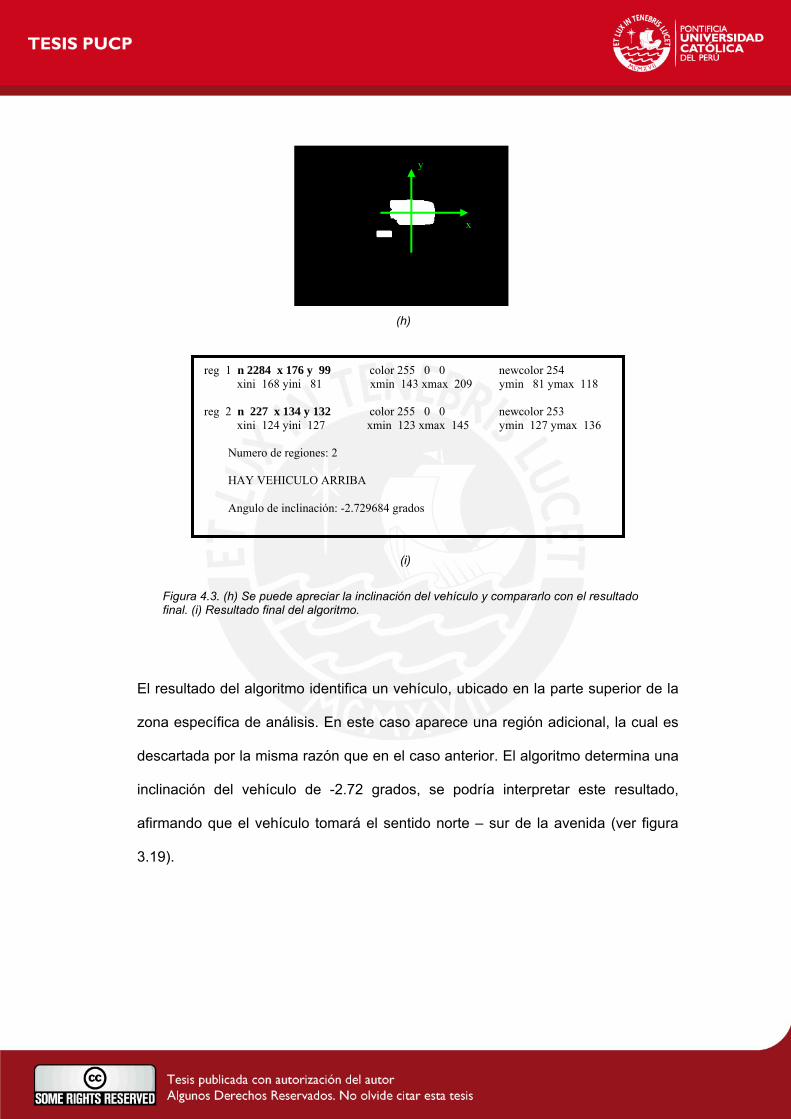
El resultado del algoritmo identifica un vehículo, ubicado en la parte superior de la
zona específica de análisis. En este caso aparece una región adicional, la cual es
descartada por la misma razón que en el caso anterior. El algoritmo determina una
inclinación del vehículo de -2.72 grados, se podría interpretar este resultado,
afirmando que el vehículo tomará el sentido norte – sur de la avenida (ver figura
3.19).
Figura 4.3. (h) Se puede apreciar la inclinación del vehículo y compararlo con el resultado final. (i) Resultado final del algoritmo.
reg 1 n 2284 x 176 y 99 color 255 0 0 newcolor 254 xini 168 yini 81 xmin 143 xmax 209 ymin 81 ymax 118 reg 2 n 227 x 134 y 132 color 255 0 0 newcolor 253 xini 124 yini 127 xmin 123 xmax 145 ymin 127 ymax 136 Numero de regiones: 2 HAY VEHICULO ARRIBA Angulo de inclinación: -2.729684 grados
x
y
(h)
(i)
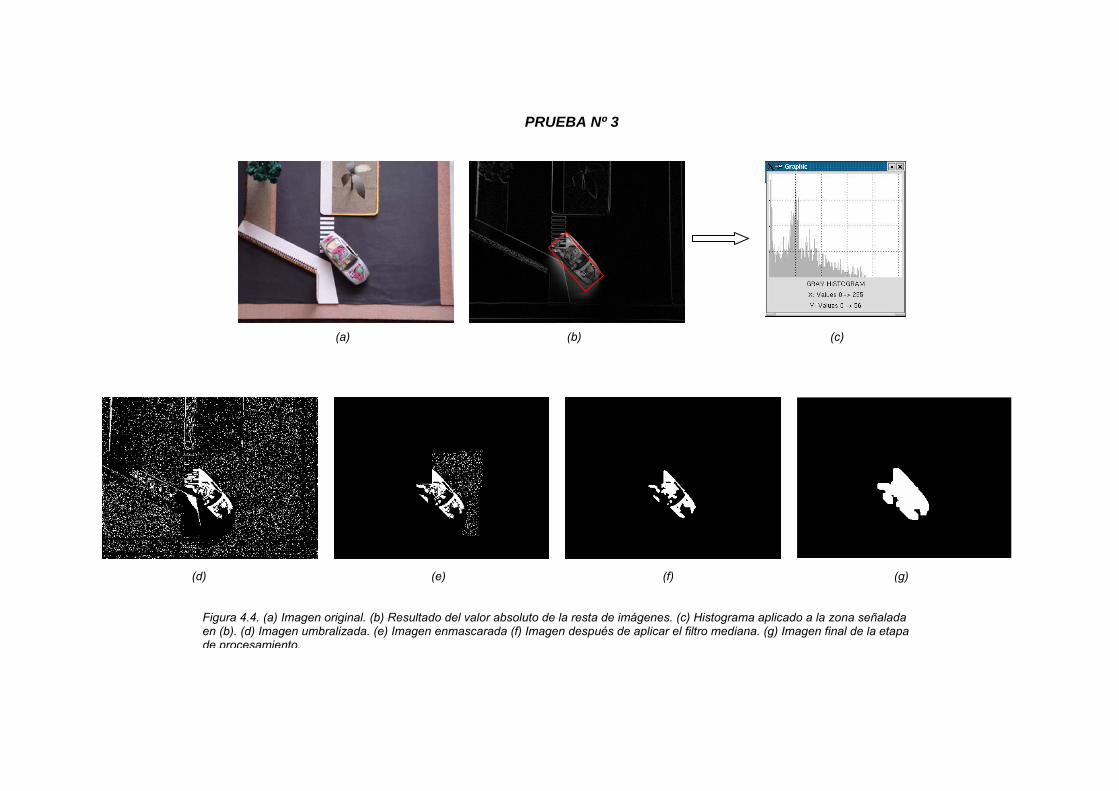
Figura 4.4. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Histograma aplicado a la zona señalada en (b). (d) Imagen umbralizada. (e) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana. (g) Imagen final de la etapa de procesamiento.
(g)
(c) (a) (b)
(d) (e) (f)
PRUEBA Nº 3

El resultado del algoritmo identifica un vehículo, ubicado en la parte inferior de la
zona específica de análisis. El algoritmo determina una inclinación del vehículo de
-47.45 grados, se podría interpretar este resultado, afirmando que el vehículo
tomará el sentido sur - norte de la avenida (ver figura 3.19).
Figura 4.4. (h) Se puede apreciar la inclinación del vehículo y compararlo con el resultado final. (i) Resultado final del algoritmo.
reg 1 n 2974 x 161 y 146 color 255 0 0 newcolor 254 xini 144 yini 106 xmin 120 xmax 196 ymin 106 ymax 182 Numero de regiones: 1 HAY VEHICULO ABAJO Angulo de inclinación: -47.455365 grados
y
(h)
(i)
x
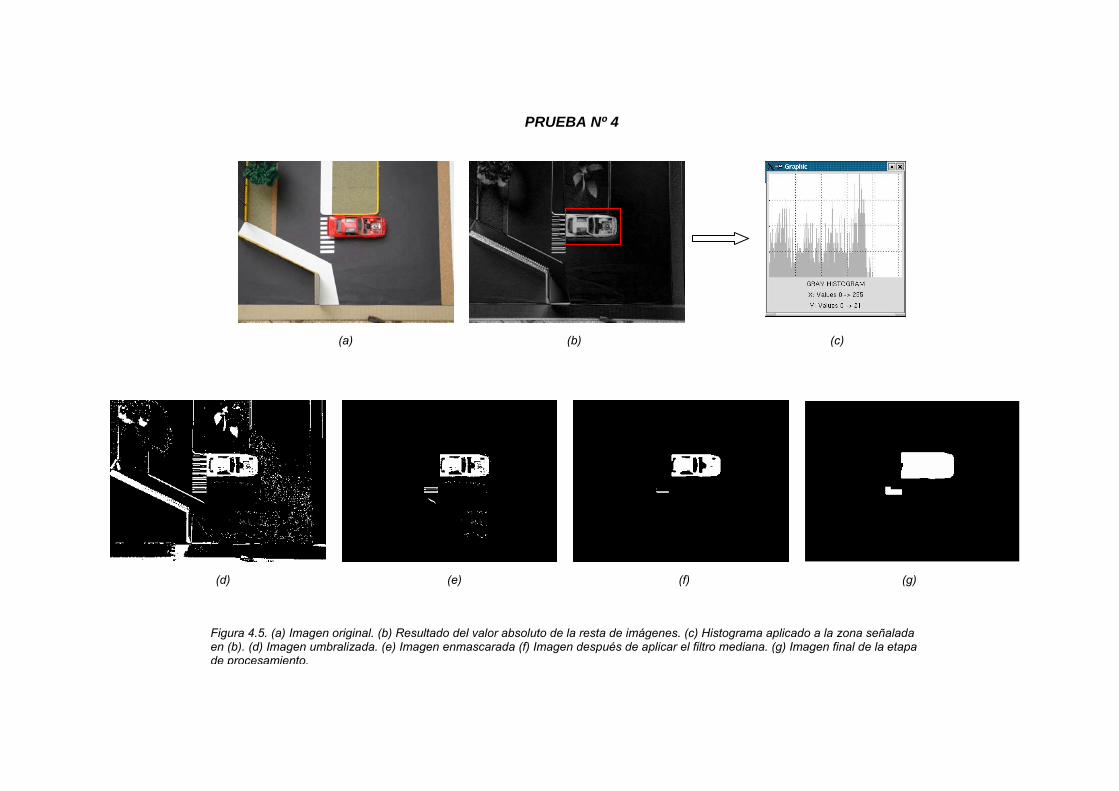
Figura 4.5. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Histograma aplicado a la zona señalada en (b). (d) Imagen umbralizada. (e) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana. (g) Imagen final de la etapa de procesamiento.
(g)
(c) (a) (b)
(f)
PRUEBA Nº 4
(e) (d)

El resultado del algoritmo identifica un vehículo, ubicado en la parte superior de la
zona específica de análisis. El algoritmo determina una inclinación del vehículo de
0.87 grados, se podría interpretar este resultado, afirmando que el vehículo tomará
el sentido norte – sur de la avenida (ver figura 3.19).
Figura 4.5. (h) Se puede apreciar la inclinación del vehículo y compararlo con el resultado final. (i) Resultado final del algoritmo.
reg 1 n 2981 x 182 y 96 color 255 0 0 newcolor 254 xini 144 yini 77 xmin 143 xmax 221 ymin 77 ymax 116 reg 2 n 231 x 131 y 135 color 255 0 0 newcolor 253 xini 120 yini 128 xmin 120 xmax 144 ymin 128 ymax 139 Numero de regiones: 2 HAY VEHICULO ARRIBA Angulo de inclinación: 0.878473 grados
y
(h)
(i)
x

(c)
Figura 4.6. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Histograma aplicado a la zona señalada en (b). (d) Imagen umbralizada. (e) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana. (g) Imagen final de la etapa de procesamiento.
(g)
(a) (b)
(f)
PRUEBA Nº 5
(e) (d)

El resultado del algoritmo identifica un vehículo, ubicado en la parte inferior de la
zona específica de análisis. El algoritmo determina una inclinación del vehículo de
-46.39 grados, se podría interpretar este resultado, afirmando que el vehículo
tomará el sentido sur – norte de la avenida (ver figura 3.19).
Figura 4.6. (h) Se puede apreciar la inclinación del vehículo y compararlo con el resultado final. (i) Resultado final del algoritmo.
reg 1 n 4008 x 173 y 148 color 255 0 0 newcolor 254 xini 152 yini 103 xmin 120 xmax 215 ymin 103 ymax 191 Numero de regiones: 1 HAY VEHICULO ABAJO Angulo de inclinación: -46.399397 grados
y
x
(h)
(i)
(c)
Figura 4.7. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Histograma aplicado a la zona señalada en (b). (d) Imagen umbralizada. (e) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana. (g) Imagen final de la etapa de procesamiento.
(g)
(a) (b)
(d) (e) (f)
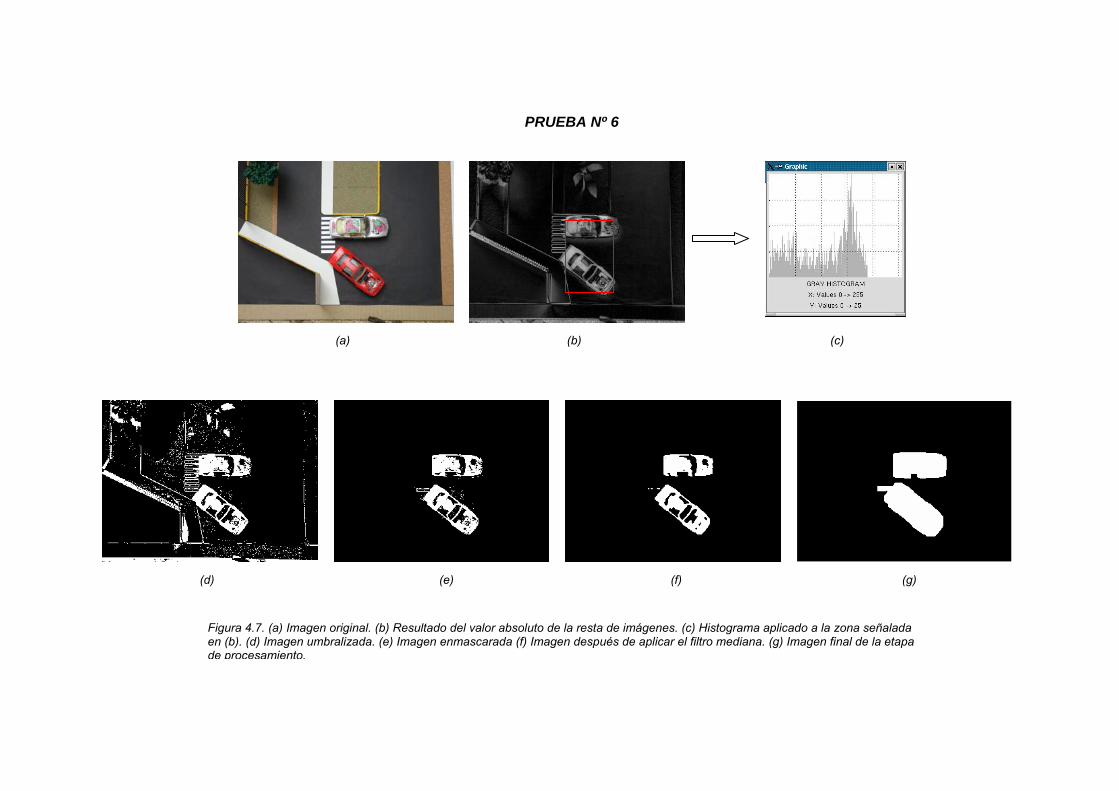
PRUEBA Nº 6

El resultado del algoritmo identifica dos vehículos, ubicados en la parte superior e
inferior de la zona específica de análisis. El algoritmo determina la inclinación de
ambos vehículos, se podría interpretar este resultado, afirmando que el vehículo
ubicado en la parte superior tomará el sentido norte - sur de la avenida, mientras
que el vehículo ubicado en la parte inferior tomará el sentido sur – norte (ver figura
3.19).
Figura 4.7. (h) Se puede apreciar la inclinación del vehículo y compararlo con el resultado final. (i) Resultado final del algoritmo.
reg 1 n 2881 x 182 y 96 color 255 0 0 newcolor 254 xini 153 yini 77 xmin 143 xmax 222 ymin 77 ymax 115 reg 2 n 3926 x 173 y 161 color 255 0 0 newcolor 253 xini 146 yini 122 xmin 120 xmax 217 ymin 122 ymax 201 Numero de regiones: 2 HAY VEHICULO ARRIBA Y ABAJO VEHICULO ARRIBA: Angulo de inclinación: 0.194862 grados VEHICULO ABAJO: Angulo de inclinación: -36.160441 grados
y
(h)
(i)
x

(c)
Figura 4.8. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Histograma aplicado a la zona señalada en (b). (d) Imagen umbralizada. (e) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana. (g) Imagen final de la etapa de procesamiento.
(g)
(a) (b)
(d) (e) (f)
PRUEBA Nº 7

El resultado del algoritmo identifica dos vehículos, ubicados en la parte superior e
inferior de la zona específica de análisis. El algoritmo determina la inclinación de
ambos vehículos, se podría interpretar este resultado, afirmando que ambos
vehículos tomarán el sentido norte - sur de la avenida (ver figura 3.19). La
inclinación que arroja el algoritmo del vehículo inferior, es ligeramente mayor al que
aparenta observando la imagen correspondiente (ver sección 4.2).
Figura 4.8. (h) Se puede apreciar la inclinación del vehículo y compararlo con el resultado final. (i) Resultado final del algoritmo.
reg 1 n 2606 x 179 y 95 color 255 0 0 newcolor 254 xini 144 yini 77 xmin 143 xmax 215 ymin 77 ymax 113 reg 2 n 3469 x 173 y 137 color 255 0 0 newcolor 253 xini 144 yini 116 xmin 123 xmax 218 ymin 116 ymax 157 reg 3 n 64 x 168 y 170 color 255 0 0 newcolor 252 xini 164 yini 166 xmin 164 xmax 171 ymin 166 ymax 173 Numero de regiones: 3 HAY VEHICULO ARRIBA Y ABAJO VEHICULO ARRIBA: Angulo de inclinación: 1.557424 grados VEHICULO ABAJO: Angulo de inclinación: 4.682660 grados
y
x
(h)
(i)
(c)
Figura 4.9. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Histograma aplicado a la zona señalada en (b). (d) Imagen umbralizada. (e) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana. (g) Imagen final de la etapa de procesamiento.
(g)
(a) (b)
(f) (d) (e)
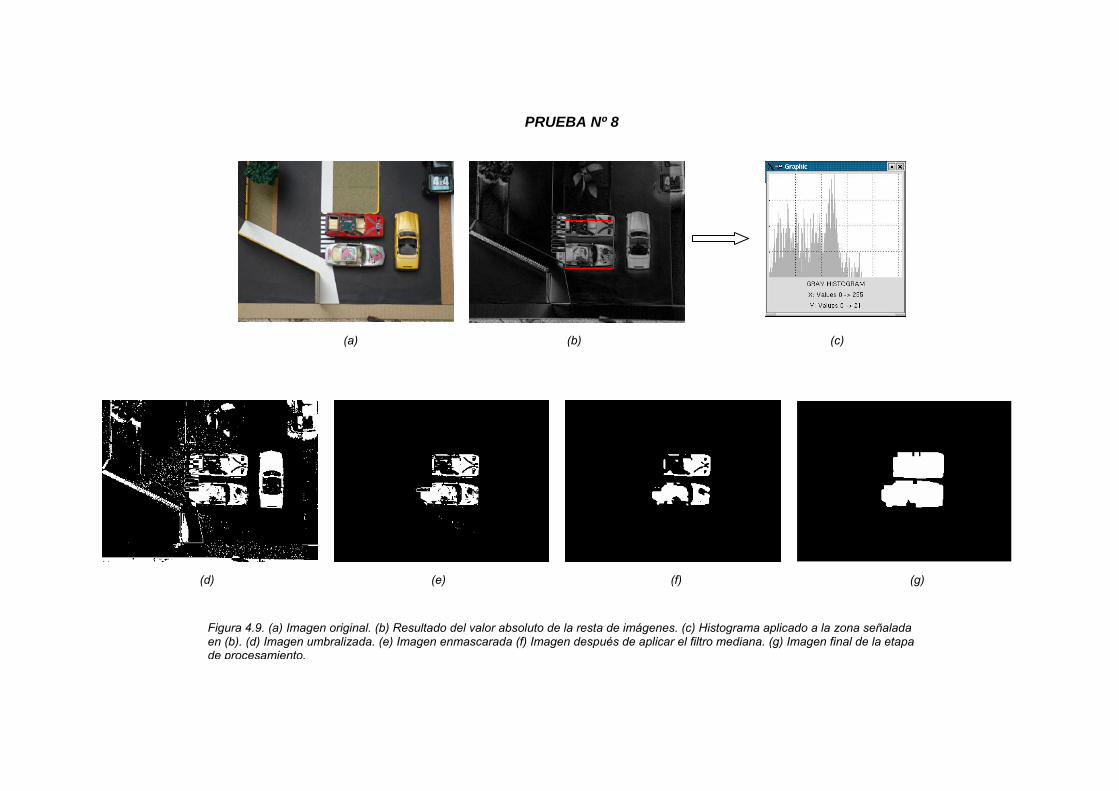
PRUEBA Nº 8

El resultado del algoritmo identifica dos vehículos, ubicados en la parte superior e
inferior de la zona específica de análisis. El algoritmo determina la inclinación de
ambos vehículos, se podría interpretar este resultado, afirmando que ambos
vehículos tomarán el sentido norte - sur de la avenida (ver figura 3.19). La
inclinación que arroja el algoritmo del vehículo inferior, es ligeramente mayor al que
aparenta observando la imagen correspondiente (ver sección 4.2).
Figura 4.9. (h) Se puede apreciar la inclinación del vehículo y compararlo con el resultado final. (i) Resultado final del algoritmo.
reg 1 n 2777 x 181 y 96 color 255 0 0 newcolor 254 xini 150 yini 77 xmin 143 xmax 218 ymin 77 ymax 115 reg 2 n 3116 x 173 y 138 color 255 0 0 newcolor 253 xini 147 yini 119 xmin 126 xmax 217 ymin 119 ymax 158 Numero de regiones: 2 HAY VEHICULO ARRIBA Y ABAJO VEHICULO ARRIBA: Angulo de inclinación: 1.892455 grados VEHICULO ABAJO: Angulo de inclinación: 4.154851 grados
y
(h)
(i)
x

(c) (d) (e)
(a) (b)
Figura 4.10. (a) Imagen original. (b) Resultado del valor absoluto de la resta de imágenes. (c) Imagen umbralizada. (d) Imagen enmascarada (f) Imagen después de aplicar el filtro mediana.
PRUEBA Nº 9
(f)
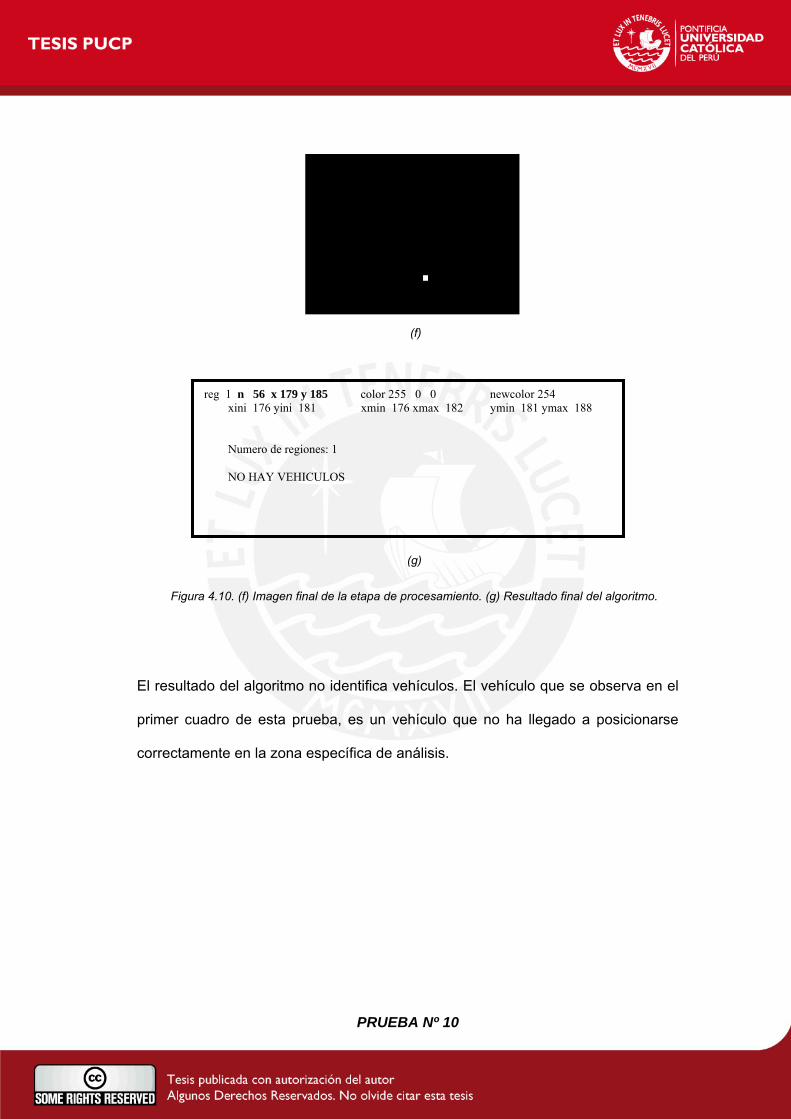
reg 1 n 56 x 179 y 185 color 255 0 0 newcolor 254 xini 176 yini 181 xmin 176 xmax 182 ymin 181 ymax 188 Numero de regiones: 1 NO HAY VEHICULOS
(g)
Figura 4.10. (f) Imagen final de la etapa de procesamiento. (g) Resultado final del algoritmo.
El resultado del algoritmo no identifica vehículos. El vehículo que se observa en el
primer cuadro de esta prueba, es un vehículo que no ha llegado a posicionarse
correctamente en la zona específica de análisis.
PRUEBA Nº 10
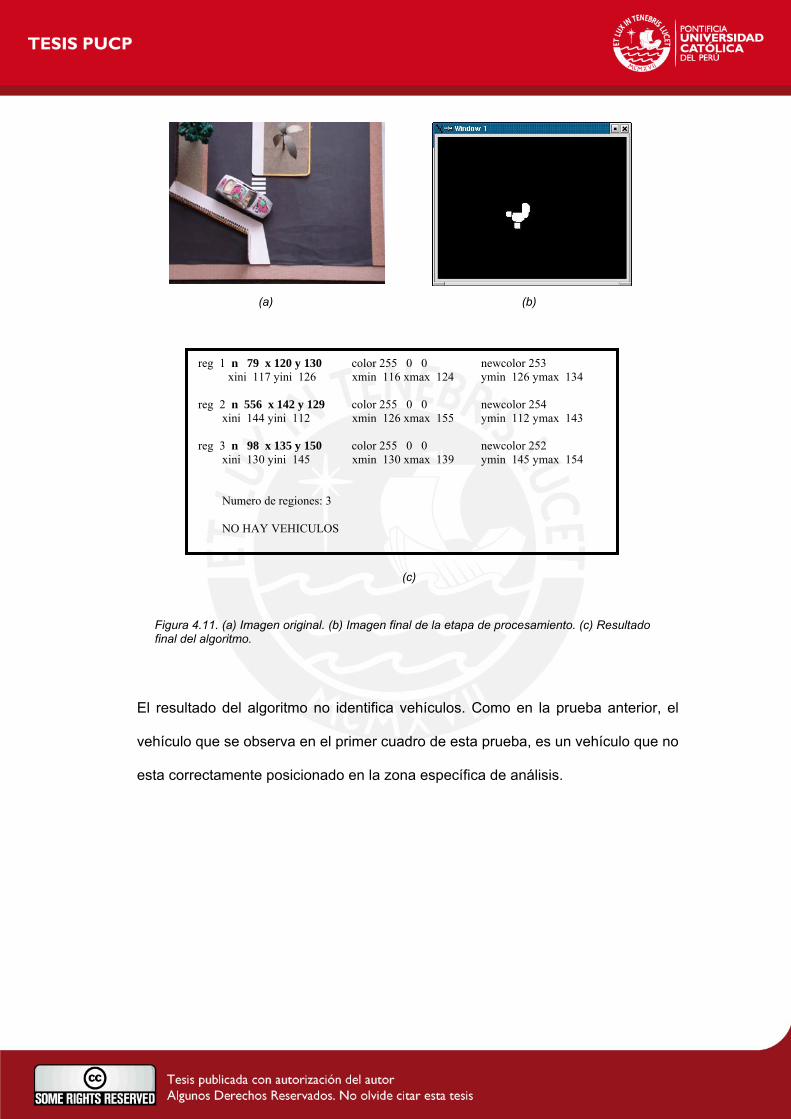
(a) (b)
reg 1 n 79 x 120 y 130 color 255 0 0 newcolor 253 xini 117 yini 126 xmin 116 xmax 124 ymin 126 ymax 134 reg 2 n 556 x 142 y 129 color 255 0 0 newcolor 254 xini 144 yini 112 xmin 126 xmax 155 ymin 112 ymax 143 reg 3 n 98 x 135 y 150 color 255 0 0 newcolor 252 xini 130 yini 145 xmin 130 xmax 139 ymin 145 ymax 154 Numero de regiones: 3 NO HAY VEHICULOS
(c)
Figura 4.11. (a) Imagen original. (b) Imagen final de la etapa de procesamiento. (c) Resultado final del algoritmo.
El resultado del algoritmo no identifica vehículos. Como en la prueba anterior, el
vehículo que se observa en el primer cuadro de esta prueba, es un vehículo que no
esta correctamente posicionado en la zona específica de análisis.
4.2 Evaluación de resultados
Como se puede apreciar en las pruebas anteriores, los resultados son muy
acertados. El algoritmo determina correctamente la ubicación de los vehículos, y
determina la orientación de los mismos. El algoritmo tiene una eficiencia de 94.5%,
es muy acertado. En la mayoría de las pruebas, el ruido generado por la resta de
imágenes es eliminado completamente. En los pocos casos en que no fue así, se
aprecia en la imagen final, regiones pequeñas que son descartadas del análisis por
sus dimensiones y ubicación. Por la misma razón que se genera el ruido después
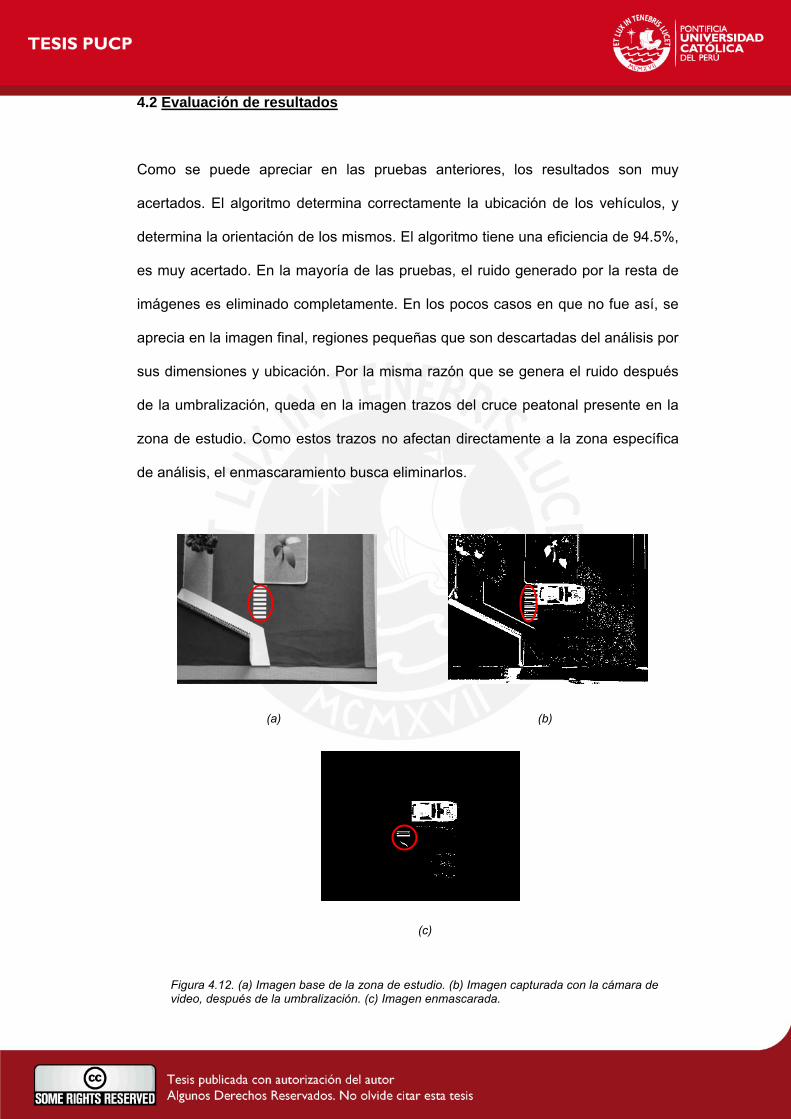
de la umbralización, queda en la imagen trazos del cruce peatonal presente en la
zona de estudio. Como estos trazos no afectan directamente a la zona específica
de análisis, el enmascaramiento busca eliminarlos.
(a) (b)
(c)
Figura 4.12. (a) Imagen base de la zona de estudio. (b) Imagen capturada con la cámara de video, después de la umbralización. (c) Imagen enmascarada.
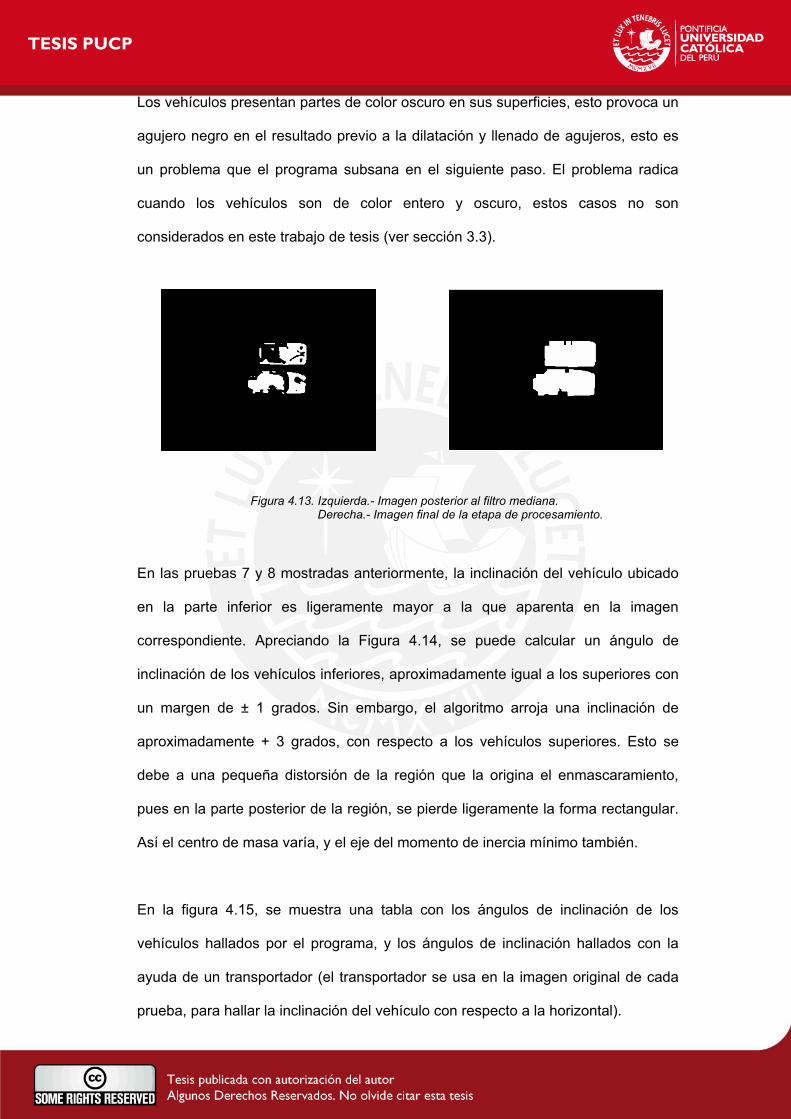
Los vehículos presentan partes de color oscuro en sus superficies, esto provoca un
agujero negro en el resultado previo a la dilatación y llenado de agujeros, esto es
un problema que el programa subsana en el siguiente paso. El problema radica
cuando los vehículos son de color entero y oscuro, estos casos no son
considerados en este trabajo de tesis (ver sección 3.3).
Figura 4.13. Izquierda.- Imagen posterior al filtro mediana. Derecha.- Imagen final de la etapa de procesamiento.
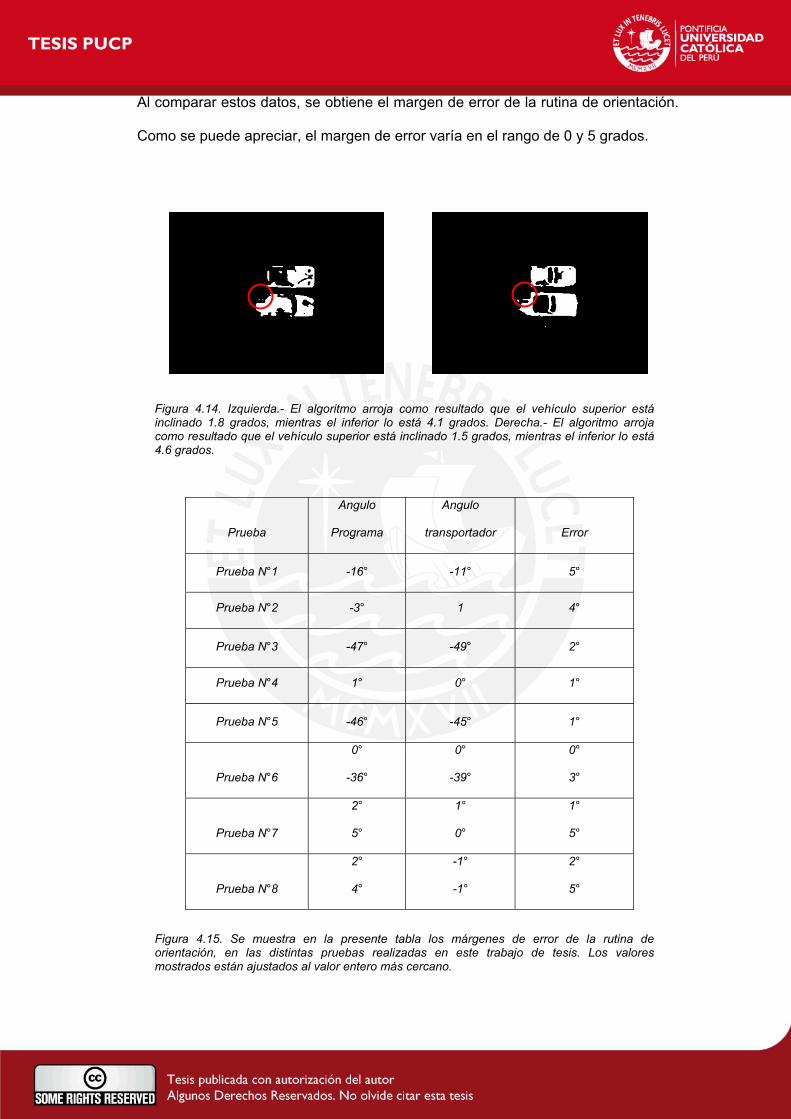
En las pruebas 7 y 8 mostradas anteriormente, la inclinación del vehículo ubicado
en la parte inferior es ligeramente mayor a la que aparenta en la imagen
correspondiente. Apreciando la Figura 4.14, se puede calcular un ángulo de
inclinación de los vehículos inferiores, aproximadamente igual a los superiores con
un margen de ± 1 grados. Sin embargo, el algoritmo arroja una inclinación de
aproximadamente + 3 grados, con respecto a los vehículos superiores. Esto se
debe a una pequeña distorsión de la región que la origina el enmascaramiento,
pues en la parte posterior de la región, se pierde ligeramente la forma rectangular.
Así el centro de masa varía, y el eje del momento de inercia mínimo también.
En la figura 4.15, se muestra una tabla con los ángulos de inclinación de los
vehículos hallados por el programa, y los ángulos de inclinación hallados con la
ayuda de un transportador (el transportador se usa en la imagen original de cada
prueba, para hallar la inclinación del vehículo con respecto a la horizontal).
Al comparar estos datos, se obtiene el margen de error de la rutina de orientación.
Como se puede apreciar, el margen de error varía en el rango de 0 y 5 grados.
Prueba
Angulo
Programa
Angulo
transportador Error
Prueba N°1 -16° -11° 5°
Prueba N°2 -3° 1 4°
Prueba N°3 -47° -49° 2°
Prueba N°4 1° 0° 1°
Prueba N°5 -46° -45° 1°
Prueba N°6
0°
-36°
0°
-39°
0°
3°
Prueba N°7
2°
5°
1°
0°
1°
5°
Prueba N°8
2°
4°
-1°
-1°
2°
5°
Figura 4.14. Izquierda.- El algoritmo arroja como resultado que el vehículo superior está inclinado 1.8 grados, mientras el inferior lo está 4.1 grados. Derecha.- El algoritmo arroja como resultado que el vehículo superior está inclinado 1.5 grados, mientras el inferior lo está 4.6 grados.
Figura 4.15. Se muestra en la presente tabla los márgenes de error de la rutina de orientación, en las distintas pruebas realizadas en este trabajo de tesis. Los valores mostrados están ajustados al valor entero más cercano.

Finalmente, el tiempo promedio de ejecución del algoritmo varía ligeramente de
acuerdo al número de vehículos presentes en la imagen. Para los casos con un
vehículo el tiempo promedio es 85 milisegundos, y para los casos con 2 vehículos
el tiempo promedio es 92 milisegundos. La etapa de procesamiento, es la que más
demora, pues toma un tiempo entre 67 y 71 milisegundos. Se muestra a
continuación los tiempos que toma cada rutina de esta etapa (tiempos en
milisegundos).
Resta de imágenes [0.92 1.15]
Umbralización [0.66 0.83]
Enmascaramiento [ 2.00 2.18]
Filtro mediana [41.6 43.12]
Dilatación [2.13 2.38]
Fill holes [20.36 22.24]
Como se puede apreciar en el cuadro anterior, la rutina del filtro mediana, es la
que más demora. Esto se debe, a que esta rutina trabaja con variables de tipo
“char”, y utiliza operaciones con punteros, lo que requiere más ciclos del
procesador, sacrificándose el tiempo de ejecución. De la misma manera sucede
con la rutina de fill holes.
4.2.1 Cálculo de la eficiencia
Hasta la rutina de segmentación, en la etapa de análisis, la eficiencia alcanzada es
de 100%, pues el algoritmo ubica correctamente los vehículos presentes en la
zona de análisis, en todas las pruebas realizadas. En la rutina de orientación, el
cálculo de inclinación de las regiones, compromete la función arco tangente, lo que
significa que el ángulo de inclinación varía entre -90 y 90 grados. El error máximo

será cuando la inclinación de la región sea exactamente 90 grados opuesta a la
verdadera (ver Figura 4.16).
y
x
En la sección 4.2 se demuestra que el margen de error de la rutina de orientación
varía entre 0 a 5 grados. En el peor de los casos el error es de 5.5 % (con respecto
al error máximo posible de 90 grados), lo que se traduce en una eficiencia que
varía entre 94.5 y 100 por ciento.
°=°⎟⎠⎞
⎜⎝⎛ 590*100
x
5.5=x
%5.94%5.5%100 =−=η
Figura 4.16. Se muestra el error máximo posible de la rutina de orientación (90 grados).
Peor de los casos
Para hallar la eficiencia total de todo el algoritmo, se toma el caso más crítico; así,
la eficiencia queda definida como: 94.5 %

CONCLUSIONES
• La visión artificial es una herramienta muy útil para aplicaciones de control de
tráfico vehicular. Aunque en algunos casos resulte ser menos económica que
otros dispositivos electrónicos que realicen la misma tarea, la visión artificial es
una herramienta completa y compacta. Y como se demuestra en este trabajo
de tesis, el procesamiento de imágenes permite el manejo y monitoreo de
muchas variables y parámetros, con una correcta programación.
• El algoritmo desarrollado, es una forma de alcanzar los objetivos trazados en
esta tesis, pero no la única. En este trabajo, se ha usado el sistema operativo
Linux, y el lenguaje de programación C, pero se puede usar el sistema
operativo Windows y otro lenguaje de programación como el Matlab. Asimismo,
pueden variar las rutinas desarrolladas en el algoritmo, siempre y cuando los
objetivos se alcancen eficientemente. Esto último depende exclusivamente del
programador.
• Las decisiones de último momento de los conductores, pueden limitar el
correcto funcionamiento del algoritmo en mención. El programa puede arrojar
como resultado, que un vehículo tomará el sentido sur – norte; sin embargo, el
conductor decide tomar repentinamente el sentido opuesto, afectando la
confiabilidad del programa. Aunque estas situaciones escapan al alcance del
algoritmo, éstas no son muy comunes.

• La rutina correspondiente a la determinación de la orientación de los vehículos,
es muy eficiente, y tiene un margen de error muy bajo (94.5% de eficiencia). La
rutina está comprendida por operaciones matemáticas simples, lo cual no
afecta significativamente a la velocidad de ejecución del programa (5.3
milisegundos en promedio, de tiempo de ejecución). Se recomienda el uso de
este pequeño algoritmo para diferentes aplicaciones, donde se requiera
determinar la orientación o inclinación de regiones.
• Los resultados arrojados por el programa son muy acertados, como se puede
apreciar en el capítulo 4, la eficiencia alcanzada por el algoritmo trabajado en
esta tesis es 94.5%. La velocidad de ejecución del programa varía entre 85 y
92 milisegundos aproximadamente, lo que indica que se puede trabajar sin
problemas con secuencias de imágenes de 10 cuadros por segundo. Para las
velocidades de los vehículos presentes en la zona de estudio (menores a 40
Km/seg cuando ingresan a la zona específica de análisis), resulta ser una
velocidad de muestreo apropiada para esta aplicación. La etapa que toma más
tiempo de ejecución es la de procesamiento, con un tiempo que varía entre 67
y 71 milisegundos. La etapa con menos tiempo de ejecución es la de análisis,
con un tiempo promedio de 8 milisegundos.
• El ruido generado después de la resta de imágenes, es un factor inevitable.
Capturar imágenes en tiempo real, idénticas a la imagen base, es poco
probable debido a las ligeras vibraciones que pueda ocasionar el viento a la
cámara de video (ver disposición de la cámara en la Figura 3.1). En este
algoritmo se utilizó el filtro mediana para eliminar el ruido (un tipo de filtro no
lineal), ya que el resultado del filtro media, mostraba los bordes de las regiones
correspondientes a los vehículos, distorsionados. Ambos filtros son
herramientas del programa VIP4L.
• El aporte de este trabajo de tesis, es la utilización de diferentes rutinas ya
conocidas en el procesamiento de imágenes (umbralización, resta de

imágenes, filtros, operaciones morfológicas, segmentación y otros), para una
aplicación específica como el control automático de tráfico vehicular en
intersecciones de tipo “T”; de manera que sea accesible para ciudades de bajo
desarrollo económico y tecnológico, pero con serios problemas de tráfico
vehicular. El algoritmo desarrollado puede ser ejecutado desde una tarjeta
FPGA, a un bajo costo. El resto de la inversión recaería en las instalaciones de
la cámara de video y los dispositivos actuadores, como semáforos.

RECOMENDACIONES
Se plantea a continuación algunas recomendaciones, con el fin de extender los
objetivos del algoritmo trabajado.
1. Hacer pruebas durante la noche, con luz artificial. Tanto con luz blanca como
amarilla, y comparar resultados.
2. En escala natural, la altura de la cámara con respecto al suelo es de 17.5
metros. Esto puede mejorarse, pues una altura menor reduciría costos de
instalación.
3. Trabajar con más profundidad la etapa de pre-procesamiento, con el objetivo
de ampliar la gama de colores de los vehículos con los que trabaja el algoritmo.
4. Trabajar diferentes herramientas para eliminar el ruido que se presenta en la
resta de imágenes. Usar otros tipos de filtros, como el gaussiano, o
implementar otras rutinas que mejoren el resultado obtenido con el filtro
mediana, y/o reducir el tiempo de ejecución de éste.
5. Mejorar la rutina de umbralización, de manera que el valor umbral se modifique
automáticamente dependiendo de los niveles de iluminación de la imagen.
Trabajar con un valor umbral variable, facilitaría las pruebas con luz artificial.
6. Aplicar el algoritmo a secuencias de imágenes (video), y tomar en cuenta los
resultados para mejorar el programa.

FUENTES
[1] MAMIC, George y MOHAMMED, Bennamoun.
2002 Representation and Recognition of 3D Free – Form Objects. Digital
Signal Processing, 12 (1): 47 - 76
[2] VELASTIN, Sergio y VALERA, M.
2005 Intelligent distributed surveillance systems: a review. IEE Proceedings
Vision, Image and Signal Processing, 152 (2): 192 - 204
[3] MICHELONI, FORESTI y SNIDARO.
2005 A network of co – operative cameras for visual surveillance. IEE
Proceedings Vision, Image and Signal Processing, 152 (2): 205 – 212
[4] CUCCHIARA, GRANA, PRATI Y VEZZANI.
2005 Computer vision system for in – house video surveillance. IEE
Proceedings Vision, Image and Signal Processing, 152 (2): 242 – 249
[5] HSU, LIAO, JENG y FAN.
2004 Real – time traffic parameter extraction using entropy. IEE Proceedings
Vision, Image and Signal Processing, 151 (3): 194 - 202
[6] TSANG, P y YU, Z.
2003 Genetic algorithm for model – based matching of projected images of
three-dimensional objects. IEE Proceedings Vision, Image and Signal
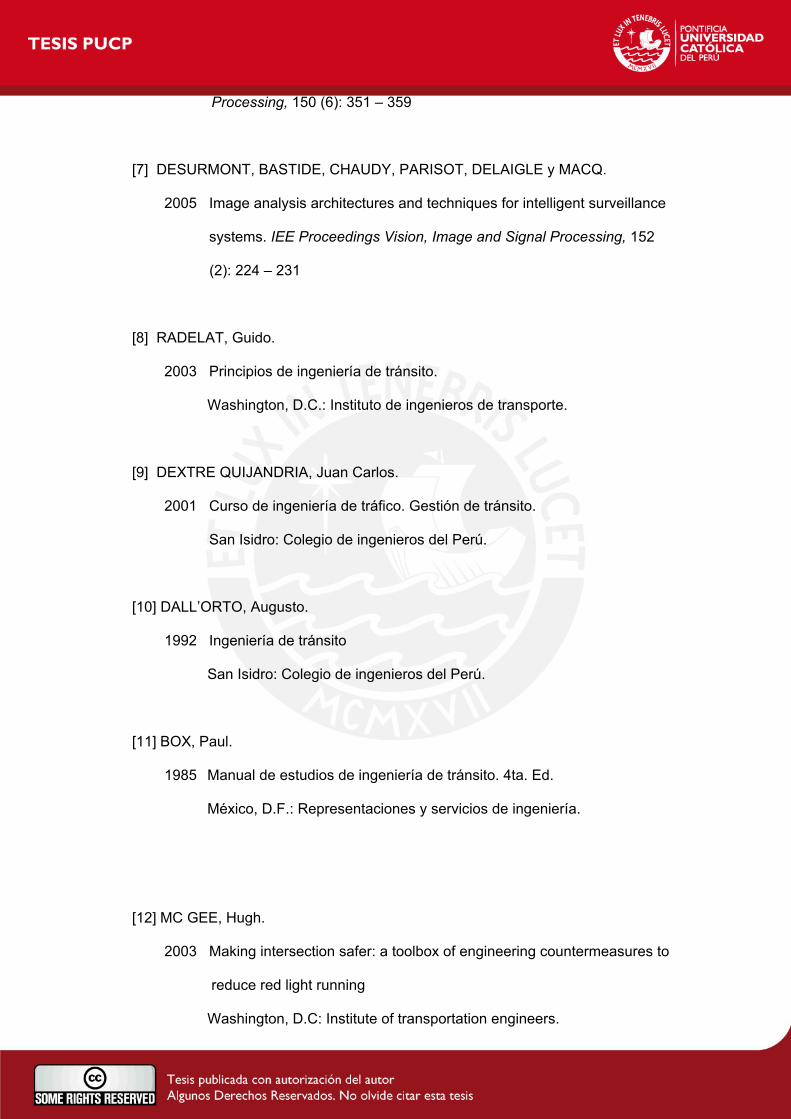
Processing, 150 (6): 351 – 359
[7] DESURMONT, BASTIDE, CHAUDY, PARISOT, DELAIGLE y MACQ.
2005 Image analysis architectures and techniques for intelligent surveillance
systems. IEE Proceedings Vision, Image and Signal Processing, 152
(2): 224 – 231
[8] RADELAT, Guido.
2003 Principios de ingeniería de tránsito.
Washington, D.C.: Instituto de ingenieros de transporte.
[9] DEXTRE QUIJANDRIA, Juan Carlos.
2001 Curso de ingeniería de tráfico. Gestión de tránsito.
San Isidro: Colegio de ingenieros del Perú.
[10] DALL’ORTO, Augusto.
1992 Ingeniería de tránsito
San Isidro: Colegio de ingenieros del Perú.
[11] BOX, Paul.
1985 Manual de estudios de ingeniería de tránsito. 4ta. Ed.
México, D.F.: Representaciones y servicios de ingeniería.
[12] MC GEE, Hugh.
2003 Making intersection safer: a toolbox of engineering countermeasures to
reduce red light running
Washington, D.C: Institute of transportation engineers.

[13] INSTITUTO DE INVESTIGACION SOBRE REPARACION DE VEHICULOS,
Centro Zaragoza.
2003 Los sistemas inteligentes de transporte.
Zaragoza: Centro Zaragoza.
[14] PARKER, J.
1996 Algorithms for image processing and computer vision
New York: Willey
[15] ESCALERA HUESO, Arturo.
2001 Visión por computadora: fundamentos y métodos
Madrid: Prentice Hall.
[16] MYLER, Harley.
1999 Fundamentals of machine vision.
Bellingham (Estados Unidos): SPIE Optical engineering press.
[17] ZULOAGA EYZAGUIRRE, Aitzol
1997 Determinación del movimiento a partir de secuencias de imágenes.
Mundo Electrónico, (278): p. 55 – 59.
[18] ACHING SAMATELO, Jorge.
2003 Algoritmos para el reconocimiento de imágenes de huellas dactilares.
Electrónica UNMSM, (12): p. 11 – 20.
[19] ANDREGUETTI, Marco.
2003 Soluciones para el tratamiento de imágenes en el automóvil. Mundo
electrónico, (345): p. 52 – 56.
[20] CERVERON, DOMINGO, VICENS.
1992 Tratamiento digital de imágenes. Mundo electrónico, (233): p. 78 – 85.
[21] ORTUZAR, JUAN.
2000 Modelos de demanda de transporte. 2da. ed.
México, D.F.: Alfaomega grupo editor.
[22] DAVIS, Anne G.
2003 Managing Traffic in Mission Valley is "The Main Event". ITS America
News [En línea], 13 (9). Septiembre [Consultado 20/09/06].
<http://www.itsa.org/>
[23] WERING, Marco
2003 Intelligent Traffic Light Control. Ercim News [En línea], (53). Abril
[Consultado 22/09/06].
<http://www.ercim.org/publication/Ercim_News/enw53/wiering.html>
[24] GAMINO CARRANZA, Arturo
2004 Operaciones morfológicas rápidas por descomposición del elemento de
estructura mediante discos [En línea]. Tesis (Ing.). Centro de
investigación y de estudios avanzados del instituto politécnico
nacional.
México, D.F. [Consultado 3/10/06]
<http://www.ctrl.cinvestav.mx/~biene/ThesisFiles/TesSkelMorfolArturo.pdf>
[25] UOCT: Unidad operativa de control de Transito
[Consultado 10/09/06]
<http://www.uoct.cl/uoct/mapas_info/ind_congestion.jsp#>
[26] JEREZ
Centro de control de tráfico [En línea] Jerez (España).
[Consultado 10/09/06]
<http://www.webjerez.com/index.php?id=609>
[27] ITS AMERCIA
[Consultado 10/09/06]
<http://www.itsa.org/>
[28] MTC
[Consultado 15/09/06]
<http://www.mtc.gob.pe>
[29] INTI, Electrónica e informática
[Consultado 15/09/06]
<http://www.inti.gov.ar/citei>
[30] VISION ARTIFICIAL
[Consultado 2/10/06]
<http://www-etsi2.ugr.es/depar/ccia/mia/transparencias/t1/T1bn.pdf>
[31] MIX, Ingeniería
Sistemas de control de infracciones de tránsito vehicular [En línea].

Buenos Aires. [Consultado 3/10/06]
<http://www.mixingenieria.com.ar/>
[32] RM, Municipalidad de Rosario
Centro de control de tránsito [En línea]. Rosario (Argentina)
[Consultado 6/10/06].
<http://www.rosario.gov.ar/sitio/servicios/transito/control_transito.jsp>
[33] INSTITUTO DE INVESTIGACIONES EN MATEMATICAS APLICADAS Y EN
SISTEMASRM, UNAM
Reconocimiento invariante de objetos aplicado a un sistema de visión para
robots [En línea]. [Consultado 16/06/07].
<http://paas.cinstrum.unam.mx/~rkm/somi17/extensos/extensos/66-
SOMI2002%20extenso.doc>