caracterizaciÓn de motor de imanes permanentes …
TRANSCRIPT

CARACTERIZACIÓN DE MOTOR DE IMANES PERMANENTES MODIFICADO
Julián Felipe Velásquez Castro
Autor
Álvaro Enrique Pinilla Sepúlveda Ph. D., M. Sc.
Asesor
Proyecto de grado para optar por el título de Ingeniero Mecánico
Universidad de los Andes
Facultad de Ingeniería
Departamento de Ingeniería Mecánica
Bogotá, D.C., Colombia
2017


I
Capítulo 1. Agradecimientos
En primer lugar, quiero agradecer a mis padres por su constante apoyo a lo largo de mi vida, por infundirme los valores que hoy por hoy me han formado como persona y por siempre fomentar ese amor a la educación y el continuo aprendizaje. A mi familia que siempre me ha apoyado de forma incondicional para cumplir mis metas, muchas gracias.
En segunda instancia, quiero darle un sincero agradecimiento a mi asesor Álvaro por haberme presentado la oportunidad de trabajar en un proyecto que relaciona las dos carreras que estudio en un ámbito de mi interés. Gracias a esta oportunidad siento que he podido enfocar mi camino académico y próximamente profesional a una meta más clara y con unas bases más firmes.
Bogotá, D.C., Colombia. Diciembre de 2017.
Julián Felipe Velásquez Castro
II
Capítulo 2. Resumen
En este documento se encuentra el proceso por el cual se caracterizó un motor de imanes permanentes, modificado por Carlos Valdivieso [1] para poder ser utilizado como generador de manera eficiente. La caracterización de esta máquina eléctrica se realiza en ambos modos de operación (generador y motor) hallando así las curvas características. El propósito para el cual se desea implementar esta máquina es la generación a baja potencia por medio de fuentes eólicas o hidráulicas, por lo que se realiza una proyección para estimar dimensiones del rotor o turbina, respectivamente.
La máquina eléctrica por caracterizar era originalmente un motor de corriente continua de imanes permanentes de la compañía Dayton, a este motor se le cambio el embobinado y los polos magnéticos con el fin de mejorar sus características de generación de energía eléctrica.
Las curvas halladas en este proyecto muestran que la máxima eficiencia de la máquina en operación de generación es del 75% con una carga resistiva de 20 Ω para valores de velocidad superiores a 1000 rpm. Mientras que usando una batería la eficiencia llega al 80% a una velocidad de 320 rpm generando así una potencia eléctrica de 12,5 W.
Para la caracterización de la máquina en operación de motor se encuentra una eficiencia cercana al 75% para una velocidad de 950 rpm. Aunque para esta caracterización se encuentra un comportamiento inusual asociado a fenómenos magnéticos.
Por último, se realizan las proyecciones para la implementación de esta máquina en generación eólica e hidráulica. Utilizando la teoría de acople de rotores eólicos a generadores de Lysen [2] se deduce que se necesita de un rotor eólico de 63 cm de diámetro o una turbina hidráulica de un diámetro de 25 cm.

III
Tabla de Contenido
Capítulo 1. Agradecimientos ................................................................................. I
Capítulo 2. Resumen ........................................................................................... II
Capítulo 3. Introducción ....................................................................................... 1
Capítulo 4. Objetivos del proyecto ....................................................................... 2
4.1. Objetivo General ........................................................................................... 2
4.2. Objetivos Específicos.................................................................................... 2
Capítulo 5. Marco teórico ..................................................................................... 3
5.1. Componentes ............................................................................................... 3
5.2. Máquinas de c.a. .......................................................................................... 5
5.3. Máquinas de c.c ............................................................................................ 5
Capítulo 6. Procedimiento .................................................................................... 7
6.1. Variables de medición................................................................................... 7
6.2. Parámetros generales de los montajes......................................................... 9
6.3. Caracterización como generador ................................................................ 10
6.4. Caracterización como motor ....................................................................... 10
6.5. Mediciones .................................................................................................. 11
Capítulo 7. Resultados ....................................................................................... 12
7.1. Caracterización en función de generador ................................................... 12
7.2. Caracterización en función de motor .......................................................... 17
7.3. Proyecciones para generación eólica e hidráulica ...................................... 21
Capítulo 8. Conclusiones y recomendaciones ................................................... 23
Capítulo 9. Bibliografía ....................................................................................... 25
Anexo 1. Planoteca ............................................................................................... 27
IV
Lista de Figuras
Figura 5.1. Rotor (derecha) y estator (izquierda) de la máquina a caracterizar [6]. . 4
Figura 6.1. Curva de calibración del torquimetro. .................................................... 8
Figura 6.2. Montaje de caracterización en función de generación. ....................... 10
Figura 6.3. Montaje de caracterización en funcionamiento de motor. ................... 11
Figura 7.1. Torque de entrada. .............................................................................. 12
Figura 7.2. Voltaje de c.c. a la salida. .................................................................... 13
Figura 7.3. Corriente de c.c. a la salida. ................................................................ 14
Figura 7.4. Potencia eléctrica generada. ............................................................... 14
Figura 7.5. Eficiencia en función de generador. .................................................... 15
Figura 7.6. Eficiencia en función de generador con batería en los terminales. ..... 16
Figura 7.7. Potencia eléctrica generada con batería en los terminales. ................ 16
Figura 7.8. Momento par de torsión medido a la salida. ........................................ 17
Figura 7.9. Momento par de torsión linealizado..................................................... 18
Figura 7.10. Voltaje de c.c. de alimentación. ......................................................... 19
Figura 7.11. Corriente de c.c. de alimentación. ..................................................... 19
Figura 7.12. Potencia mecánica a la salida. .......................................................... 20
Figura 7.13. Eficiencia en funcionamiento de motor. ............................................. 21
Lista de Tablas
Tabla 6.1. Instrumentos de medición. ..................................................................... 8
1
Capítulo 3. Introducción
En Colombia la mayor parte de la demanda energética del país es suplida por centrales hidroeléctricas, con una capacidad instalada de 11.676 MW al cierre del año 2016 [3]. Y aunque el potencial hídrico de Colombia es enorme, en épocas de fenómenos climáticos de sequias han existido problemas con la capacidad de suplir la demanda, lo cual se puede solucionar implementando el uso de energías alternativas como lo son la energía solar y eólica, ya que se tiene un gran potencial de estas fuentes energéticas en el país [4] [5].
Para el año 2015 se registraron 425.212 viviendas que no tenían servicio de energía eléctrica, dejando al país con un índice de cobertura de energía eléctrica del 96,96% [6]. El uso de pequeños generadores alimentados por energía hidráulica o eólica resulta ser una solución viable teniendo en cuenta la disponibilidad de los recursos naturales en el país [7].
Este tipo de soluciones se han venido desarrollando en la Universidad de los Andes, tras varios trabajos y proyectos de investigación se ha podido desarrollar conocimiento relacionado a la generación eólica e hidráulica a bajas potencias. Entre los proyectos realizados se encuentran varios trabajos enfocados a las máquinas eléctricas necesarias para la conversión de energía hidráulica o eólica en energía eléctrica.
El presente proyecto busca seguir un trabajo de investigación previo, en el cual se modificaron parámetros de un motor de imanes permanentes, para mejorar su eficiencia en operación de generador [1]. El trabajo realizado en este documento consiste en caracterizar dicha máquina eléctrica en funcionamiento de generador y de motor. La primera caracterización se realiza por medio del uso de cargas resistivas y una batería, para la segunda se hallan las curvas características asociadas al comportamiento como motor.
Debido a que se desea implementar esta máquina eléctrica en aplicaciones de generación en el ámbito eólico e hidráulico también se busca hacer una proyección de algunos parámetros del rotor o turbina necesarios para generar energía, al igual que la caja de reducción en caso de necesitarla.
2
Capítulo 4. Objetivos del proyecto
4.1. Objetivo General
El objetivo de este proyecto es determinar las curvas características de rendimiento de una máquina de imanes permanentes de corriente continua que ha sido modificada (por Carlos Valdivieso) en la Universidad de los Andes.
4.2. Objetivos Específicos
• Diseñar y construir un sistema nivelado y centrado para la caracterización de la máquina, tanto en funcionamiento de generador como de motor.
• Realizar la caracterización en funcionamiento de generador para diversas cargas resistivas y adicionalmente una batería.
• Realizar la caracterización en funcionamiento de motor. • Realizar proyecciones para generación eólica e hidráulica.
3
Capítulo 5. Marco teórico
Cuando se habla de máquinas eléctricas se hace referencia a un dispositivo con la capacidad de transformar energía eléctrica a energía mecánica y viceversa. Aquellos dispositivos que convierten la energía mecánica en energía eléctrica se les conoce como generadores eléctricos, mientras que aquellos que realizan el proceso inverso se les llama motores eléctricos. Adicionalmente a estos dos tipos de máquinas existe un tercer dispositivo, llamado transformador, que convierte la energía eléctrica variando sus características, ya sea para un transporte más eficiente o para poder ser utilizada en dispositivos con características eléctricas diferentes a las de alimentación.
Ambas máquinas eléctricas se pueden separar en dos grupos, las máquinas de corriente continua (c.c) y las máquinas de corriente alterna (c.a.). Prácticamente todas las máquinas eléctricas trabajan con voltajes y corrientes de c.a. de forma interna, y aunque es posible construir máquinas de c.c. (como el disco de Faraday) no son usadas en la práctica y no se espera que puedan tener alguna aplicación real.
A continuación, se da una explicación del comportamiento de cada uno de los tipos de máquinas mencionados y de sus componentes. Puesto que la máquina a caracterizar es de c.c. e imanes permanentes se realiza un énfasis particular sobre este tipo de máquina. Toda la información fue tomada de las fuentes [8] [9] [10].
5.1. Componentes
5.1.1. Inducido
Conjunto de devanados conectados entre sí, con el fin de generar un voltaje con aporte positivo al resultado esperado. El inducido puede estar acoplado tanto al rotor como al estator. La máquina por caracterizar tiene su inducido acoplado al rotor, siendo este el caso para prácticamente todas las máquinas de c.c. usadas en la práctica.

4
5.1.2. Rotor
Es el componente giratorio de la máquina eléctrica, por lo general se encuentra ubicado en el interior del estator. El rotor de la máquina a caracterizar cuenta con un devanado imbricando simple de 16 bobinas con 35 vueltas por bobina. Este componente se puede observar en la Figura 5.1.
5.1.3. Estator
Es el componente estacionario de la máquina eléctrica, comúnmente se encuentra en la parte externa y suministra el flujo magnético para la conversión de energía, este es proporcionado ya sea por electroimanes o imanes permanentes. La máquina por caracterizar cuenta con imanes permanentes de neodimio grado N35 pegados en tres filas de cuatro imanes por polo. Este se puede apreciar en la Figura 5.1.
Figura 5.1. Rotor (derecha) y estator (izquierda) de la máquina a caracterizar [1].
5.1.4. Entre hierro
Es el espacio existente entre el rotor y el estator. Se busca que sea lo más pequeño posible para evitar disminuciones sustanciales de la eficiencia de la máquina. Entre mayor sea este espacio, mayor será la corriente de magnetización necesaria para su funcionamiento, ya que existe una reducción indeseada del flujo magnético. Cuando es muy pequeño se pueden presentar inconvenientes de índole mecánica de interferencia y ruido. El entre hierro tiene una dirección, siendo esta axial o radial, asociada a la dirección del vector normal a la superficie.
5
5.1.5. Conmutador
Conjunto de segmentos de cobre en forma de cilindro, en donde cada uno de los segmentos se encuentra aislado de los demás, el conmutador se encuentra acoplado (pero aislado) del rotor. Cada uno de los segmentos de cobre se encuentra conectado a los terminales de los devanados, lo cual permite aislar las diversas espiras. El conmutador de la máquina del proyecto cuenta con 16 segmentos como se puede apreciar en la Figura 5.1.
5.1.6. Escobillas
Las escobillas se encuentran ubicadas en el estator, por lo cual están estacionarias. Estas escobillas se encuentran enfrentadas contra la superficie del conmutador y comúnmente son de grafito. Tienen la función de convertir los voltajes y corrientes de c.a. del inducido en el rotor, en voltajes y corrientes de c.c. en los terminales de la máquina. Las escobillas de máquina a caracterizar se encuentran en el estator y se pueden observar en la Figura 5.1.
5.2. Máquinas de c.a.
Las máquinas de c.a. se pueden clasificar en dos grupos, las sincrónicas y las de inducción. Las máquinas sincrónicas tienen un suministro externo de c.c. por medio de un contacto rotatorio y cuentan con una velocidad de rotación sincronizada con la frecuencia de la corriente, ya sea de salida o de entrada. Las máquinas de inducción tienen un suministro mediante inducción magnética en sus devanados de campo y cuentan con c.a. tanto en el estator como en el rotor.
5.3. Máquinas de c.c
En las máquinas de c.c. convencionales el devanado del inducido y el conmutador se encuentran acoplados al rotor y la corriente es transportada por medio de las escobillas de grafito, mientras que en el estator se encuentra el devanado de campo alimentado por una fuente de potencia de c.c. que genera un campo magnético. A diferencia de las máquinas de c.c. convencionales, que usan electroimanes por medio de la inducción de campo, la máquina a caracterizar tiene imanes permanentes acoplados en el estator, este tipo de máquina es conocido como una máquina de c.c. de imán permanente (PMDC, por sus siglas en ingles).
6
Las PMDC tienen grandes ventajas sobre otro tipo de máquinas principalmente en aplicaciones de baja potencia. Estas máquinas suelen ser más eficientes, baratas, pequeñas y sencillas en comparación con las máquinas de electroimanes; además que no requieren de una alimentación de potencia de c.c. para el devanado de campo, evitando de esta forma perdidas de cobre indeseadas. Como desventajas, estas máquinas no tienen la capacidad de producir un campo magnético tan potente como aquellas con electroimanes y los imanes de esta se ven afectados por fenómenos de desmagnetización a largo plazo, implicando una posible reducción en la vida útil de la máquina.
7
Capítulo 6. Procedimiento
En primera instancia es necesario diseñar y construir un banco de pruebas que permita caracterizar la máquina eléctrica funcionando como generador y como motor. Para lo anterior existen diversos requerimientos que son necesarios tener en cuenta a la hora del diseño. Se explica a continuación las características de las pruebas a realizar, teniendo en cuenta las variables a medir y los parámetros a calcular, esto para poder definir los parámetros de diseño del banco de pruebas.
Se requiere que, para el funcionamiento como generador, se suministre energía mecánica a la máquina, proveniente de, por ejemplo, un motor; mientras que la energía eléctrica producida se puede suministrar a reóstatos o baterías. Cuando la máquina funciona como motor es necesario alimentarla con energía eléctrica, procedente de una fuente de c.c., mientras que la energía mecánica producida se puede suministrar, acoplando al eje un generador.
6.1. Variables de medición
Para ambos montajes se necesitan medir cuatro variables que definirán la potencia mecánica y eléctrica, ya sea alimentada o producida. Las variables por medir son voltaje, corriente, velocidad angular y momento par de torsión. De esta forma es posible calcular la potencia eléctrica y mecánica por medio de las siguientes expresiones.
𝑃"#" = 𝑉𝐼
𝑃'"( = 𝜔𝑇
Para el cálculo de la eficiencia se relacionan la potencia eléctrica con la mecánica, dependiendo el funcionamiento de la máquina. Las expresiones para calcular las eficiencias en funcionamiento de generador y motor son, respectivamente.
𝜂,"-"./01. =𝑃"#"𝑃'"(
𝜂'131. =𝑃'"(𝑃"#"

8
Para las diversas variables a medir se utilizan los equipos listados en la Tabla 6.1.
Tabla 6.1. Instrumentos de medición. Variable Equipo de Medición Precisión
Resistencia Fluke 117 True RMS Multimeter ±0.9% + 2 Voltaje Fluke 117 True RMS Multimeter ±0.9% + 2
Corriente Fluke i30 AC/DC Current Clamp ±1% ±2 mA Fluke 117 True RMS Multimeter ±0.9% + 2
Velocidad angular Extech RPM10: Photo/Contact Tachometer ±0.05% + 1
Momento Par de Torsión Fluke 87V True RMS Multimeter ±0.1% + 1
Futek Torque Sensor TRS605 No linealidad ±0.2%
Histéresis ±0.1%
Adicionalmente se calibra el torquimetro a utilizar, hallando así una relación entre el momento par de torsión medido y el voltaje asociado. Esta calibración se realiza estáticamente, por medio del uso de un brazo conocido y una serie de combinaciones de masas calibradas previamente, para evitar la rotación del eje de salida se usa un freno que fue diseñado anteriormente con el mismo propósito. Los resultados obtenidos de esta calibración, con un voltaje de alimentación de 12 V, se pueden observar en la Figura 6.1.
Figura 6.1. Curva de calibración del torquimetro.
y = 0.2002x + 0.0019R² = 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Torq
ue (N
/m)
Voltaje (V)
9
6.2. Parámetros generales de los montajes
Además de los equipos de medición, se requiere de un motor y un generador adicional, para la caracterización de la máquina como generador y motor, respectivamente. Debido a lo anterior se selecciona un motor Siemens 1LA7 096-6YA60 de frecuencia variable y un generador de c.c. de imanes permanentes #443541 de la compañía Windstream Power LLC.
Una vez se tienen los componentes de los dos montajes se pasa a la etapa del diseño, en la cual se tiene en cuenta que los ejes de los rotores de las máquinas utilizadas deben estar nivelados y concéntricos. Se decide utilizar una mesa de pruebas usada para caracterizar un generador de c.a. de imanes permanentes trifásico, pero diseñada con el propósito de poder caracterizar cualquier tipo de máquina rotodinámica de baja potencia. La mesa tiene dos secciones: en la primera se tiene una matriz de agujeros roscados distanciados horizontalmente por 25 mm y verticalmente por 1 in. En la segunda sección de la mesa la matriz tiene sus agujeros roscados a una distancia horizontal de 25 mm y vertical de 38 mm. El uso de esta mesa junto con el diseño de los elementos del sistema permitirá una nivelación en ambos ejes, dejando como único problema la nivelación de altura [11].
Se requiere que la altura de los ejes de la máquina a caracterizar, el torquimetro y el motor usado, para la caracterización como generador, sea la misma. Debido a lo anterior se diseña una base para la máquina que permita nivelar su eje con el del motor, usando un perfil omega con cuatro orificios para acoplar a la máquina y cuatro más para acoplar a la mesa. Para el torquimetro se diseña un soporte con altura variable, y huecos de las dimensiones asociadas, en el cual se restringe su movimiento, permitiendo únicamente su desplazamiento en el eje de altura.
Para el segundo montaje, se requiere que la altura del eje de la máquina a caracterizar, el torquimetro y el generador usado, para la caracterización como motor, sea la misma. Ya con los componentes diseñados previamente, se pasa a diseñar una base para el generador, para nivelarlo a la misma altura de la máquina, usando nuevamente un perfil omega con los mismos requerimientos que el usado para la máquina a caracterizar.

10
6.3. Caracterización como generador
Con los componentes del sistema ya manufacturados se pasa a la construcción del montaje para la caracterización de la máquina en su funcionamiento de generador. En la Figura 6.2 se puede apreciar el montaje ya construido. Se puede apreciar la máquina, a caracterizar como generador, en el centro, conectada a un reóstato en su salida eléctrica, y su eje acoplado al del torquimetro y esté al del motor que proporciona la potencia mecánica. Además, se pueden apreciar algunos de los equipos de medición usados.
Figura 6.2. Montaje de caracterización en función de generación.
La frecuencia del motor Siemens es controladora por medio del variador de velocidad Schneider Electric Telemecanique Altivar 71, por lo que la variable controladora en este caso fue la velocidad angular de entrada.
Para la caracterización de la máquina se opta por usar un reóstato variando su resistencia, para la toma de datos de las múltiples variables, de 0 a 100 Ω. Adicionalmente se utilizó una batería de carro de 12 V para analizar el rendimiento del generador bajo esta condición de carga.
6.4. Caracterización como motor
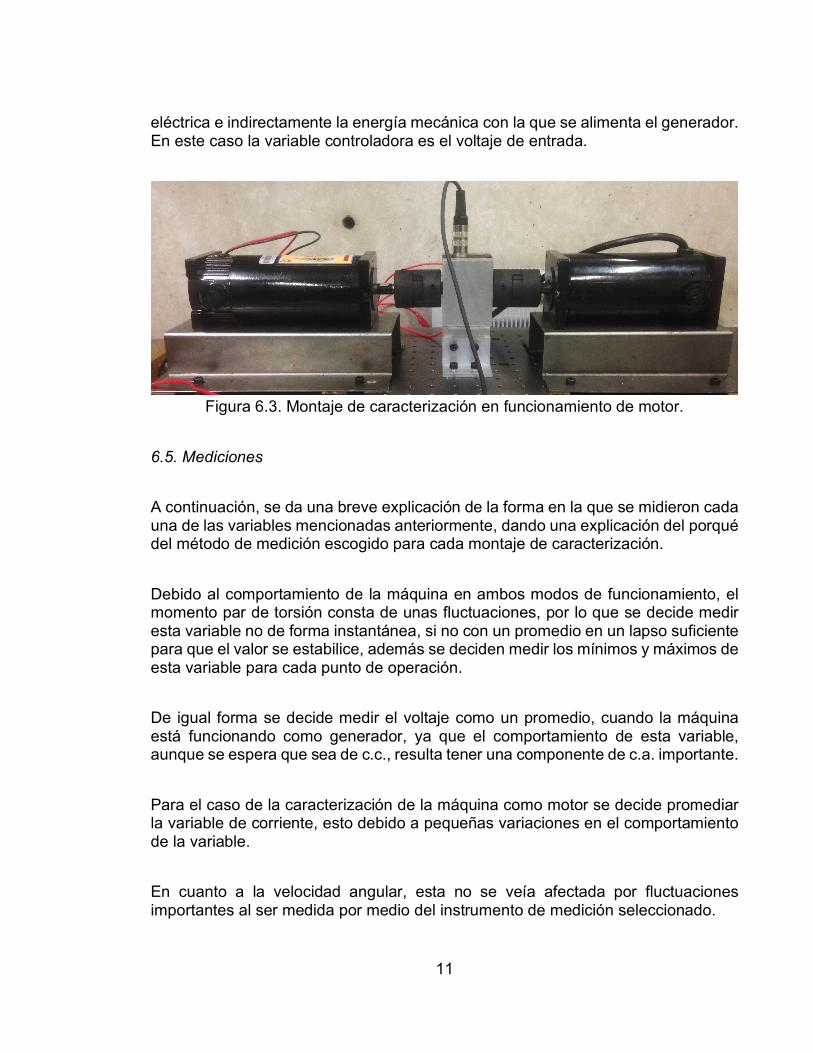
En la Figura 6.3 se puede apreciar el montaje para la caracterización de la máquina en funcionamiento como motor. La máquina eléctrica (izquierda) funcionando como motor se conecta a una fuente de c.c. en los terminales, y se acopla el eje que transfiere la potencia mecánica al torquimetro y esté al generador mencionado. El generador a su vez está conectado a un reóstato para poder controlar la energía
11
eléctrica e indirectamente la energía mecánica con la que se alimenta el generador. En este caso la variable controladora es el voltaje de entrada.
Figura 6.3. Montaje de caracterización en funcionamiento de motor.
6.5. Mediciones
A continuación, se da una breve explicación de la forma en la que se midieron cada una de las variables mencionadas anteriormente, dando una explicación del porqué del método de medición escogido para cada montaje de caracterización.
Debido al comportamiento de la máquina en ambos modos de funcionamiento, el momento par de torsión consta de unas fluctuaciones, por lo que se decide medir esta variable no de forma instantánea, si no con un promedio en un lapso suficiente para que el valor se estabilice, además se deciden medir los mínimos y máximos de esta variable para cada punto de operación.
De igual forma se decide medir el voltaje como un promedio, cuando la máquina está funcionando como generador, ya que el comportamiento de esta variable, aunque se espera que sea de c.c., resulta tener una componente de c.a. importante.
Para el caso de la caracterización de la máquina como motor se decide promediar la variable de corriente, esto debido a pequeñas variaciones en el comportamiento de la variable.
En cuanto a la velocidad angular, esta no se veía afectada por fluctuaciones importantes al ser medida por medio del instrumento de medición seleccionado.
12
Capítulo 7. Resultados
7.1. Caracterización en función de generador
Para las pruebas realizadas se controla la frecuencia de la corriente alterna en la entrada del motor Siemens 1LA7 096-6YA60, por medio del variador de velocidad Altivar 71, lo anterior resulta en un control indirecto de la velocidad angular. Los datos se toman para diversos valores de velocidad con una carga resistiva fija y se repite el procedimiento para distintos valores de carga.
A continuación, se puede observar el comportamiento del torque de entrada, el voltaje y la corriente en función de la velocidad de rotación para diversos valores de carga resistiva.
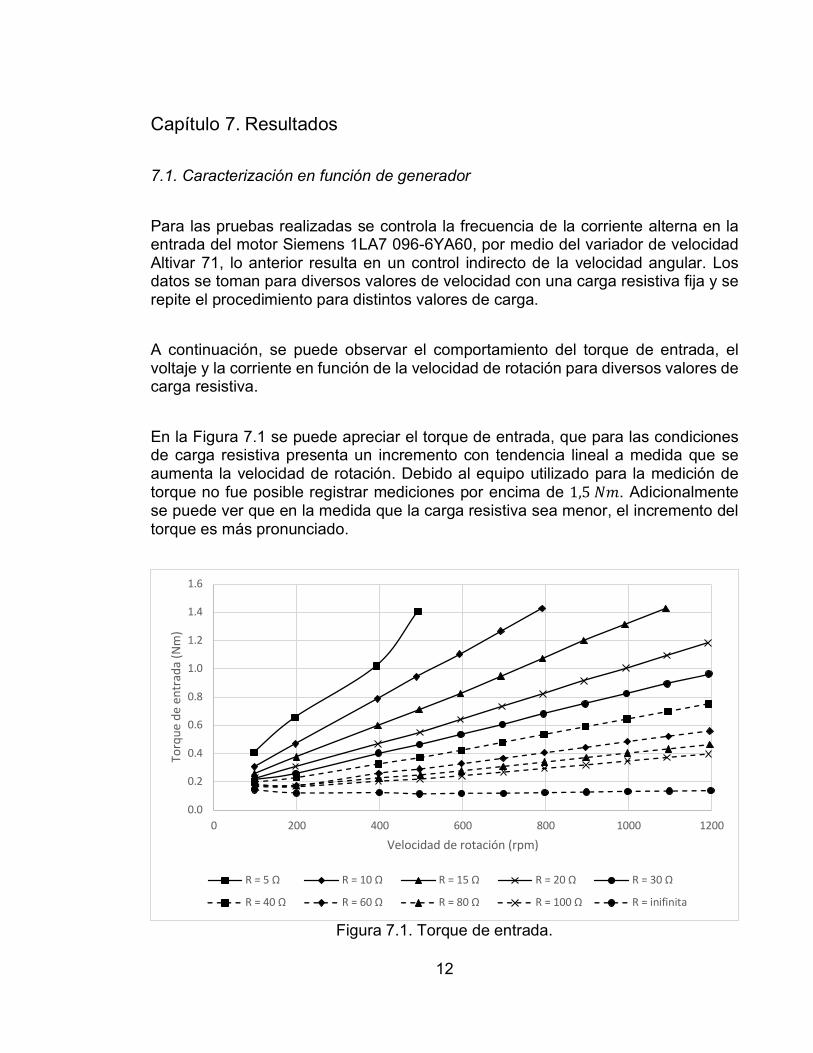
En la Figura 7.1 se puede apreciar el torque de entrada, que para las condiciones de carga resistiva presenta un incremento con tendencia lineal a medida que se aumenta la velocidad de rotación. Debido al equipo utilizado para la medición de torque no fue posible registrar mediciones por encima de 1,5𝑁𝑚. Adicionalmente se puede ver que en la medida que la carga resistiva sea menor, el incremento del torque es más pronunciado.
Figura 7.1. Torque de entrada.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
0 200 400 600 800 1000 1200
Torq
ue d
e en
trad
a (N
m)
Velocidad de rotación (rpm)
R = 5 Ω R = 10 Ω R = 15 Ω R = 20 Ω R = 30 Ω
R = 40 Ω R = 60 Ω R = 80 Ω R = 100 Ω R = inifinita
13
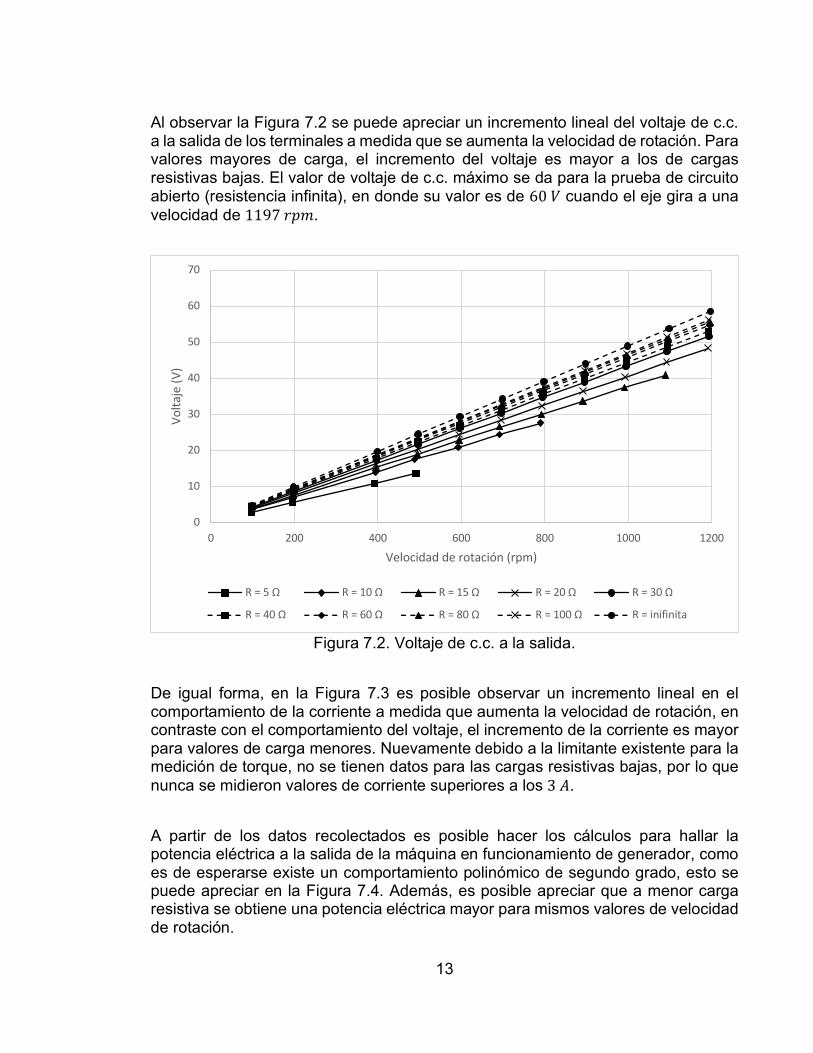
Al observar la Figura 7.2 se puede apreciar un incremento lineal del voltaje de c.c. a la salida de los terminales a medida que se aumenta la velocidad de rotación. Para valores mayores de carga, el incremento del voltaje es mayor a los de cargas resistivas bajas. El valor de voltaje de c.c. máximo se da para la prueba de circuito abierto (resistencia infinita), en donde su valor es de 60𝑉 cuando el eje gira a una velocidad de 1197𝑟𝑝𝑚.
Figura 7.2. Voltaje de c.c. a la salida.
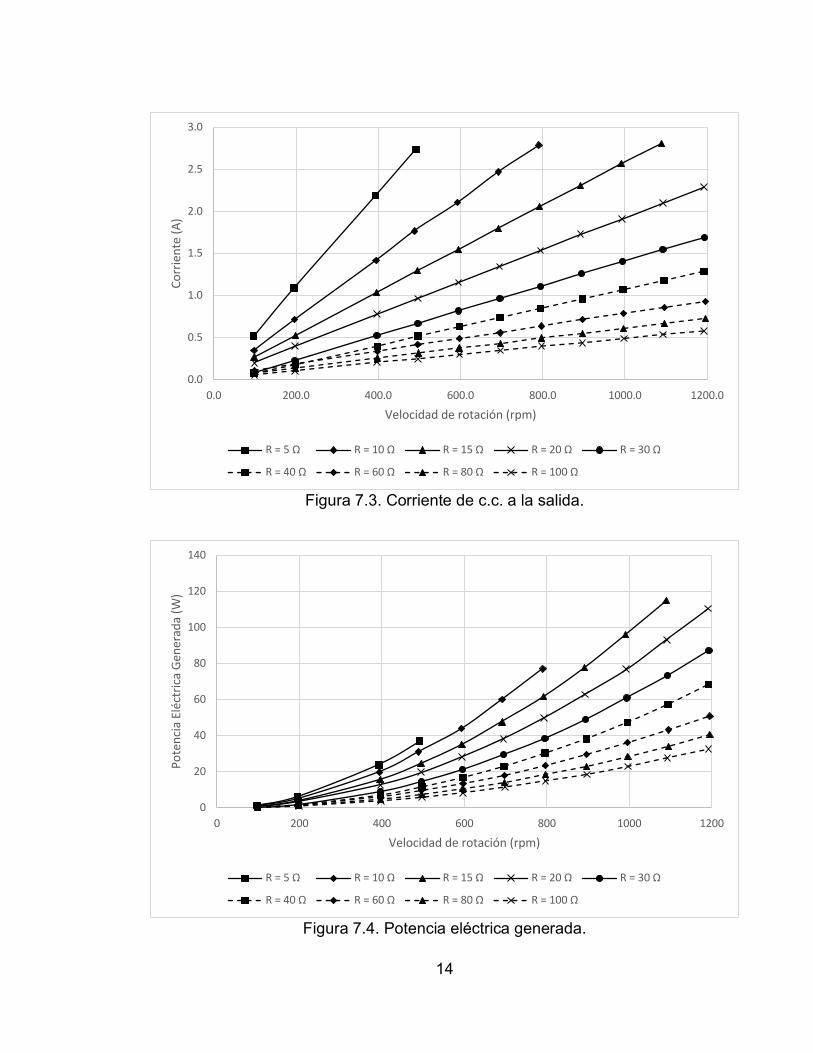
De igual forma, en la Figura 7.3 es posible observar un incremento lineal en el comportamiento de la corriente a medida que aumenta la velocidad de rotación, en contraste con el comportamiento del voltaje, el incremento de la corriente es mayor para valores de carga menores. Nuevamente debido a la limitante existente para la medición de torque, no se tienen datos para las cargas resistivas bajas, por lo que nunca se midieron valores de corriente superiores a los 3𝐴.
A partir de los datos recolectados es posible hacer los cálculos para hallar la potencia eléctrica a la salida de la máquina en funcionamiento de generador, como es de esperarse existe un comportamiento polinómico de segundo grado, esto se puede apreciar en la Figura 7.4. Además, es posible apreciar que a menor carga resistiva se obtiene una potencia eléctrica mayor para mismos valores de velocidad de rotación.
0
10
20
30
40
50
60
70
0 200 400 600 800 1000 1200
Volta
je (V
)
Velocidad de rotación (rpm)
R = 5 Ω R = 10 Ω R = 15 Ω R = 20 Ω R = 30 Ω
R = 40 Ω R = 60 Ω R = 80 Ω R = 100 Ω R = inifinita
14
Figura 7.3. Corriente de c.c. a la salida.
Figura 7.4. Potencia eléctrica generada.
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0.0 200.0 400.0 600.0 800.0 1000.0 1200.0
Corr
ient
e (A
)
Velocidad de rotación (rpm)
R = 5 Ω R = 10 Ω R = 15 Ω R = 20 Ω R = 30 Ω
R = 40 Ω R = 60 Ω R = 80 Ω R = 100 Ω
0
20
40
60
80
100
120
140
0 200 400 600 800 1000 1200
Pote
ncia
Elé
ctric
a Ge
nera
da (W
)
Velocidad de rotación (rpm)
R = 5 Ω R = 10 Ω R = 15 Ω R = 20 Ω R = 30 Ω
R = 40 Ω R = 60 Ω R = 80 Ω R = 100 Ω
15
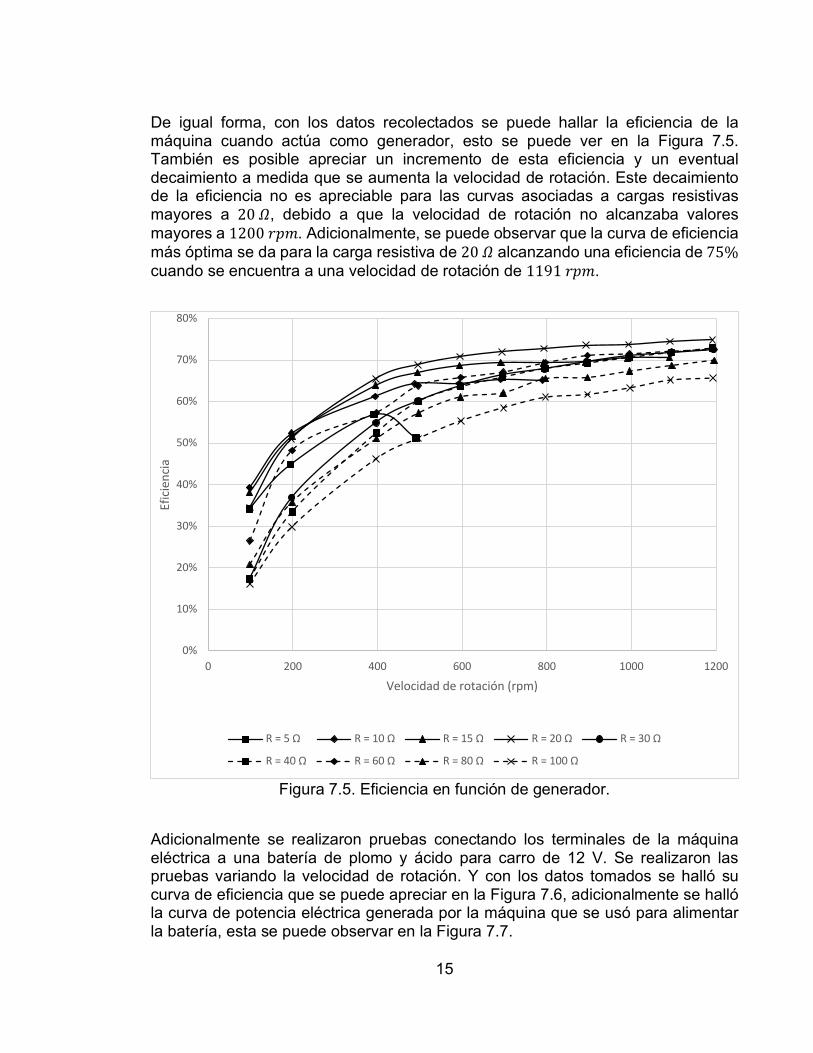
De igual forma, con los datos recolectados se puede hallar la eficiencia de la máquina cuando actúa como generador, esto se puede ver en la Figura 7.5. También es posible apreciar un incremento de esta eficiencia y un eventual decaimiento a medida que se aumenta la velocidad de rotación. Este decaimiento de la eficiencia no es apreciable para las curvas asociadas a cargas resistivas mayores a 20𝛺, debido a que la velocidad de rotación no alcanzaba valores mayores a 1200𝑟𝑝𝑚. Adicionalmente, se puede observar que la curva de eficiencia más óptima se da para la carga resistiva de 20𝛺 alcanzando una eficiencia de 75% cuando se encuentra a una velocidad de rotación de 1191𝑟𝑝𝑚.
Figura 7.5. Eficiencia en función de generador.
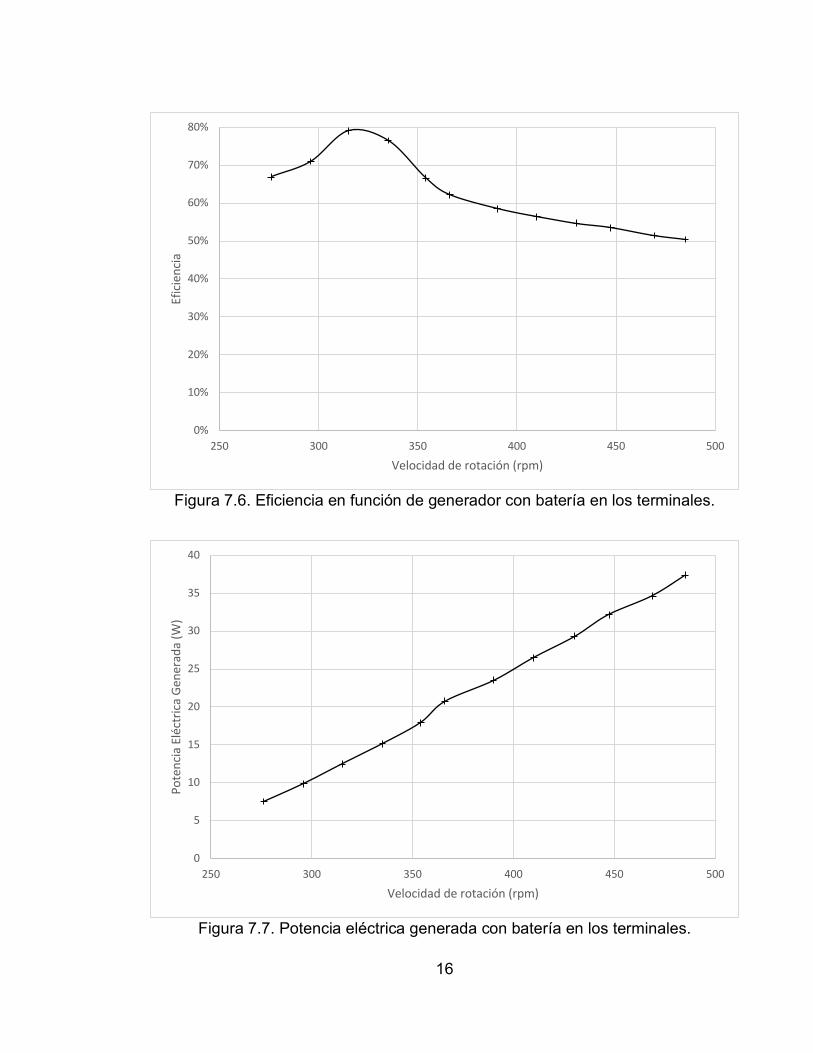
Adicionalmente se realizaron pruebas conectando los terminales de la máquina eléctrica a una batería de plomo y ácido para carro de 12 V. Se realizaron las pruebas variando la velocidad de rotación. Y con los datos tomados se halló su curva de eficiencia que se puede apreciar en la Figura 7.6, adicionalmente se halló la curva de potencia eléctrica generada por la máquina que se usó para alimentar la batería, esta se puede observar en la Figura 7.7.
0%
10%
20%
30%
40%
50%
60%
70%
80%
0 200 400 600 800 1000 1200
Efic
ienc
ia
Velocidad de rotación (rpm)
R = 5 Ω R = 10 Ω R = 15 Ω R = 20 Ω R = 30 Ω
R = 40 Ω R = 60 Ω R = 80 Ω R = 100 Ω
16
Figura 7.6. Eficiencia en función de generador con batería en los terminales.
Figura 7.7. Potencia eléctrica generada con batería en los terminales.
0%
10%
20%
30%
40%
50%
60%
70%
80%
250 300 350 400 450 500
Efic
ienc
ia
Velocidad de rotación (rpm)
0
5
10
15
20
25
30
35
40
250 300 350 400 450 500
Pote
ncia
Elé
ctric
a Ge
nera
da (W
)
Velocidad de rotación (rpm)
17
7.2. Caracterización en función de motor
Para las pruebas de caracterización de la máquina en funcionamiento de motor, se alimentó la máquina con una fuente de c.c., controlando el voltaje de entrada. Adicionalmente, se acoplo el eje de la máquina con el del generador Windstream Power LLC #443541, y a este se le acoplo un reóstato en sus terminales para controlar de forma indirecta la potencia mecánica asociada a ambas máquinas. Para las pruebas se tomaron las medidas necesarias en pasos de un voltio.
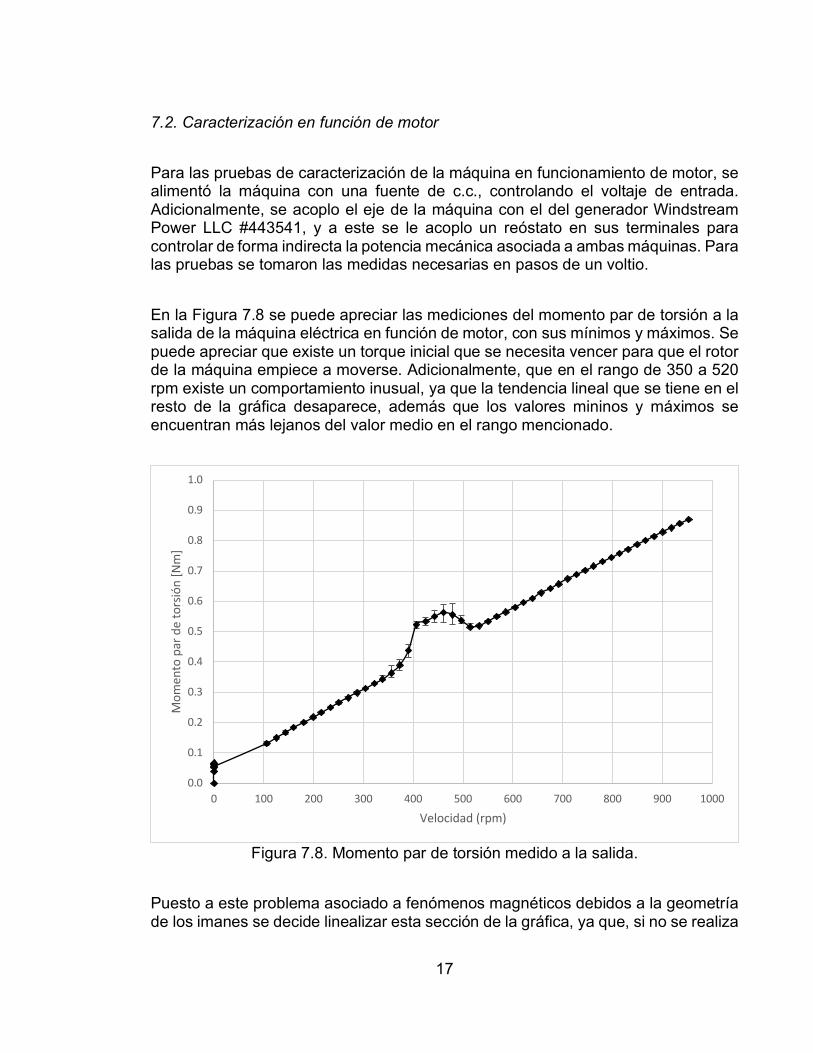
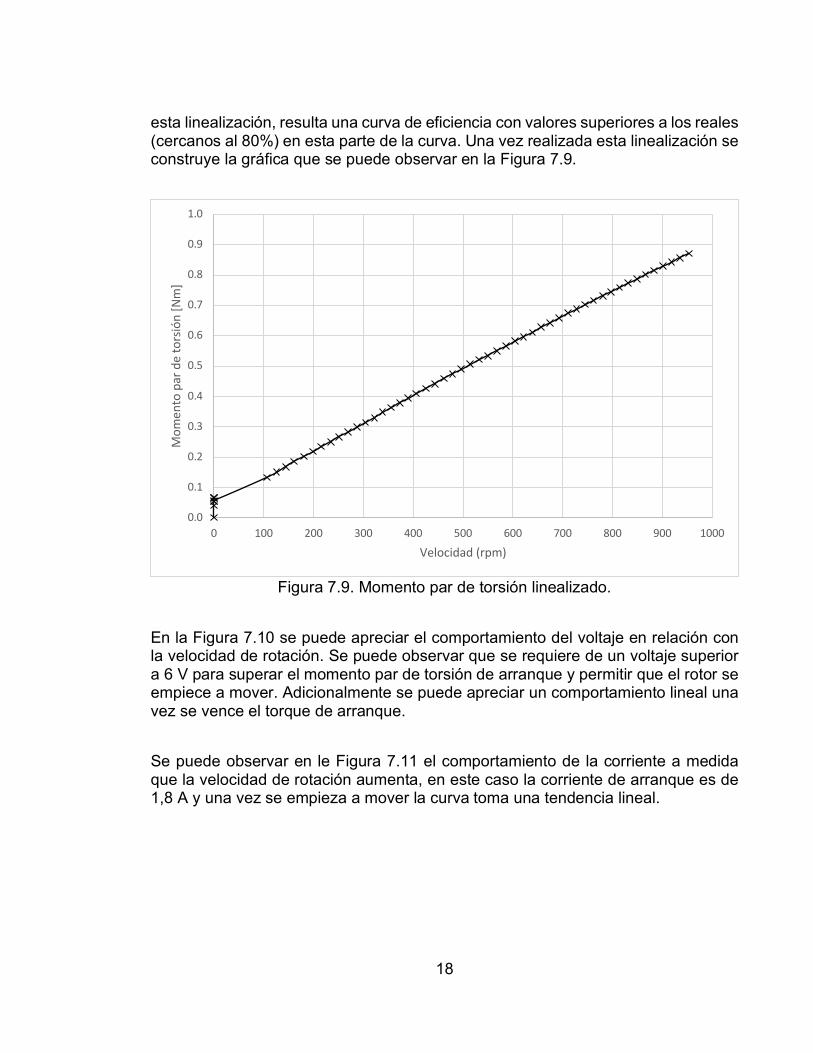
En la Figura 7.8 se puede apreciar las mediciones del momento par de torsión a la salida de la máquina eléctrica en función de motor, con sus mínimos y máximos. Se puede apreciar que existe un torque inicial que se necesita vencer para que el rotor de la máquina empiece a moverse. Adicionalmente, que en el rango de 350 a 520 rpm existe un comportamiento inusual, ya que la tendencia lineal que se tiene en el resto de la gráfica desaparece, además que los valores mininos y máximos se encuentran más lejanos del valor medio en el rango mencionado.
Figura 7.8. Momento par de torsión medido a la salida.
Puesto a este problema asociado a fenómenos magnéticos debidos a la geometría de los imanes se decide linealizar esta sección de la gráfica, ya que, si no se realiza
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 100 200 300 400 500 600 700 800 900 1000
Mom
ento
par
de
tors
ión
[Nm
]
Velocidad (rpm)
18
esta linealización, resulta una curva de eficiencia con valores superiores a los reales (cercanos al 80%) en esta parte de la curva. Una vez realizada esta linealización se construye la gráfica que se puede observar en la Figura 7.9.
Figura 7.9. Momento par de torsión linealizado.
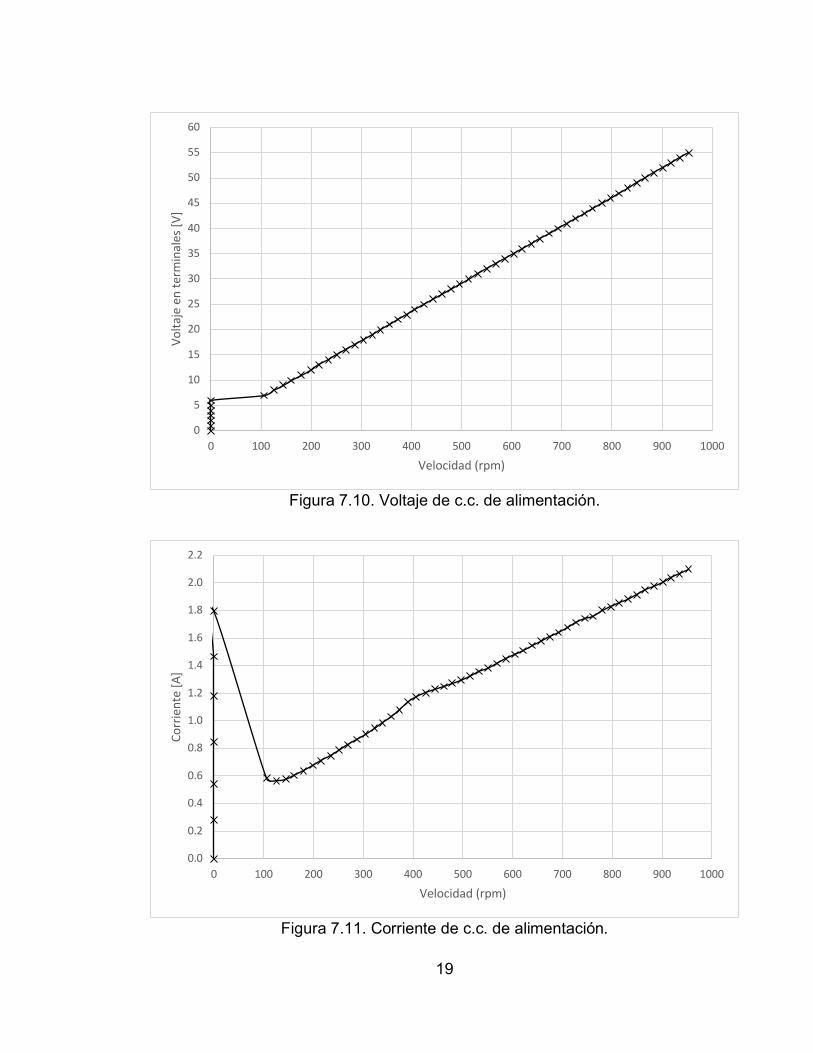
En la Figura 7.10 se puede apreciar el comportamiento del voltaje en relación con la velocidad de rotación. Se puede observar que se requiere de un voltaje superior a 6 V para superar el momento par de torsión de arranque y permitir que el rotor se empiece a mover. Adicionalmente se puede apreciar un comportamiento lineal una vez se vence el torque de arranque.
Se puede observar en le Figura 7.11 el comportamiento de la corriente a medida que la velocidad de rotación aumenta, en este caso la corriente de arranque es de 1,8 A y una vez se empieza a mover la curva toma una tendencia lineal.
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 100 200 300 400 500 600 700 800 900 1000
Mom
ento
par
de
tors
ión
[Nm
]
Velocidad (rpm)
19
Figura 7.10. Voltaje de c.c. de alimentación.
Figura 7.11. Corriente de c.c. de alimentación.
0
5
10
15
20
25
30
35
40
45
50
55
60
0 100 200 300 400 500 600 700 800 900 1000
Volta
je e
n te
rmin
ales
[V]
Velocidad (rpm)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
2.2
0 100 200 300 400 500 600 700 800 900 1000
Corr
ient
e [A
]
Velocidad (rpm)

20
En la Figura 7.12 se puede apreciar el comportamiento de la potencia mecánica entregada por la máquina eléctrica, como es de esperarse con la linealizaciación, la curva tiene una tendencia polinómica de segundo grado.
Figura 7.12. Potencia mecánica a la salida.
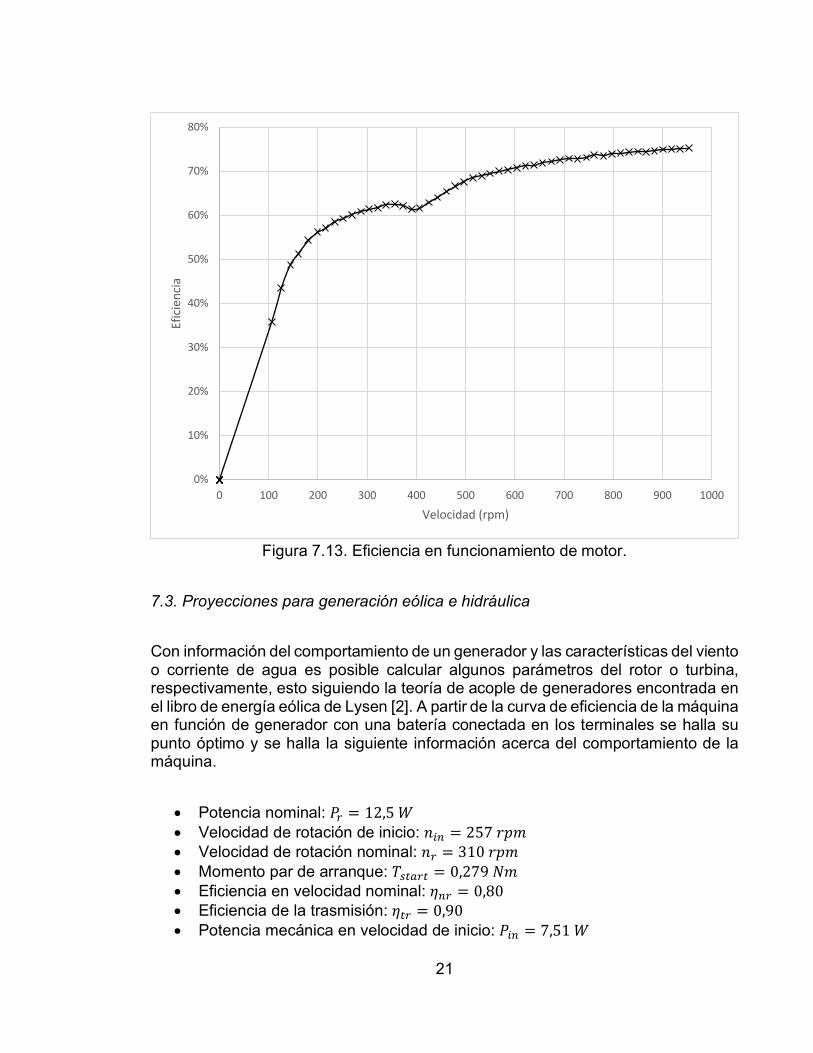
Por último, se construye la gráfica de eficiencia que se puede observar en la Figura 7.13, se puede apreciar que existe una tendencia a que la eficiencia deje de aumentar y eventualmente decrezca, los últimos datos medidos tienden hacia una eficiencia del 75%. En el rango donde se tiene el problema con el momento par de torsión todavía se puede apreciar una pequeña perturbación cercana a la velocidad de 400 rpm, debida principalmente a el comportamiento de la corriente y por ende al de la potencia eléctrica consumida por la máquina.
0
10
20
30
40
50
60
70
80
90
0 100 200 300 400 500 600 700 800 900 1000
Pote
ncia
Mec
ánic
a [W
]
Velocidad (rpm)
21
Figura 7.13. Eficiencia en funcionamiento de motor.
7.3. Proyecciones para generación eólica e hidráulica
Con información del comportamiento de un generador y las características del viento o corriente de agua es posible calcular algunos parámetros del rotor o turbina, respectivamente, esto siguiendo la teoría de acople de generadores encontrada en el libro de energía eólica de Lysen [2]. A partir de la curva de eficiencia de la máquina en función de generador con una batería conectada en los terminales se halla su punto óptimo y se halla la siguiente información acerca del comportamiento de la máquina.
• Potencia nominal: 𝑃. = 12,5𝑊 • Velocidad de rotación de inicio: 𝑛F- = 257𝑟𝑝𝑚 • Velocidad de rotación nominal: 𝑛. = 310𝑟𝑝𝑚 • Momento par de arranque: 𝑇G3/.3 = 0,279𝑁𝑚 • Eficiencia en velocidad nominal: 𝜂-. = 0,80 • Eficiencia de la trasmisión: 𝜂3. = 0,90 • Potencia mecánica en velocidad de inicio: 𝑃F- = 7,51𝑊
0%
10%
20%
30%
40%
50%
60%
70%
80%
0 100 200 300 400 500 600 700 800 900 1000
Efic
ienc
ia
Velocidad (rpm)
22
Acoplando un rotor eólico con las siguientes características de viento.
• Densidad: 𝜌 = 1,225𝑘𝑔/𝑚M • Velocidad de viento de Inicio: 𝑉F- = 5𝑚/𝑠 • Coeficiente de rendimiento máximo del rotor: 𝐶𝑝'/P = 0,35 • Velocidad de viento nominal: 𝑉. = 12𝑚/𝑠
Se hallan entonces los siguientes resultados de características geométricas, velocidad de diseño y relación de la reducción de la caja de cambios.
• Área del rotor: 𝐴 = 0,31𝑚Q • Diámetro del rotor: 𝐷 = 0,63𝑚 • Relación velocidad de diseño y reducción de la caja: 𝜆0 ∗ 𝑖 = 1,69 • Velocidad de diseño máxima: 𝜆0'/P = 1,59 • Velocidad de diseño escogida: 𝜆0 = 1 • Reducción requerida: 𝑖 = 1,69
Acoplando una turbina hidráulica con las siguientes características de corriente de agua.
• 𝜌 = 998,2𝑘𝑔/𝑚M • 𝑉F- = 1𝑚/𝑠 • 𝐶𝑝'/P = 0,35 • 𝑉. = 3𝑚/𝑠
Se hallan entonces los siguientes resultados de características geométricas, velocidad de diseño y relación de la reducción de la caja de cambios.
• Área de la turbina: 𝐴 = 0,05𝑚Q • Diámetro de la turbina: 𝐷 = 0,25𝑚 • Relación velocidad de diseño y reducción de la caja: 𝜆0 ∗ 𝑖 = 3,32 • Velocidad de diseño máxima: 𝜆0'/P = 1,59 • Velocidad de diseño escogida: 𝜆0 = 1 • Reducción requerida: 𝑖 = 3,32
23
Capítulo 8. Conclusiones y recomendaciones
En el transcurso del proyecto se diseñaron y construyeron los componentes necesarios para la implementación de dos montajes para la caracterización de una máquina eléctrica modificada en funcionamiento de generador y motor. Las piezas se diseñaron con el fin de que el sistema esté siempre nivelado, en sus tres ejes, logrando la nivelación en dos ejes al utilizar la mesa de pruebas para caracterizar máquinas eléctricas de baja potencia. El tercer eje (altura) se nivelo por medio del diseño de piezas con altura definida para las diversas máquinas eléctricas utilizadas, y un acople de altura variable para el torquimetro, al cual se le hallo su curva de calibración para rectificar su correcto funcionamiento.
Con los montajes ya ensamblados se realizó la caracterización de generador para diversas cargas resistivas y una batería, y para la caracterización de motor se construyeron las curvas características por medio diversos puntos de datos.
A partir de la caracterización de generador se encontró que la máxima eficiencia se alcanza para velocidades superiores a 1000 rpm con una carga resistiva de 20 Ω, siendo el valor de esta eficiencia cercano al 75%. Cuando se conectó la batería al generador, el punto óptimo se encuentra a una velocidad de 320 rpm generando una potencia eléctrica de 12,5 W.
De las curvas características de la máquina en funcionamiento de motor se encontró que la eficiencia aumenta con la velocidad de rotación tendiendo a un valor de eficiencia del 75% a una velocidad de 950 rpm. Además, se encontró un comportamiento peculiar en el rango de velocidad de 300 a 400 rpm asociado a fenómenos magnéticos de los polos de la máquina.
Finalmente fue posible estimar algunos parámetros geométricos para la implementación de esta máquina en la generación de energía a partir de una fuente eólica o hidráulica. Se encontró que se requiere un rotor eólico de un diámetro de 63 cm o una turbina hidráulica de 25 cm de diámetro.
Para futuros proyectos es recomendable la implementación de un sistema con la capacidad de monitorear las variables y poder visualizar su comportamiento en el tiempo para realizar un debido análisis y encontrar posibles fuentes de error en caso de un comportamiento anormal.

24
Adicionalmente es recomendable diseñar y construir un rectificador que disminuya la componente de c.a. a en los terminales de salida de la máquina cuando esta funciona como generador.
Por último, debido a las complicaciones existentes con las mediciones asociadas al momento par de torsión es recomendable diseñar e implementar imanes en geometrías semicirculares que disminuyan los problemas asociados a fenómenos magnéticos.
25
Capítulo 9. Bibliografía
[1] C. A. Valdivieso Gómez, «Adaptación de un motor de imanes permanentes para funcionamiento como generador», Universidad de los Andes, Bogotá, Colombia, 2016.
[2] E. H. Lysen, Introduction to Wind Energy: Basic and Advanced Introduction to Wind Energy with Emphasis on Water Pumping Windmills. CWD- Consultancy Services Wind Energy Developing Countries, 1983.
[3] PARATEC, «Capacidad efectiva por tipo de generación», XM S.A.S E.S.P, 16-ago-2017. [En línea]. Disponible en: http://paratec.xm.com.co/paratec/SitePages/generacion.aspx?q=capacidad. [Accedido: 16-ago-2017].
[4] Instituto de Hidrología, Meteorología y Estudios Ambientales, «Distribución espacial y temporal de la irradiación global horizontal en Colombia», Atlas de Radiación Solar, Ultravioleta, y Ozono de Colombia, 26-oct-2015. [En línea]. Disponible en: http://atlas.ideam.gov.co/basefiles/1.Distribucion-espacial-y-temporal-de-la-Irradiacion-Global-Horizontal-en-Colombia.pdf. [Accedido: 16-ago-2017].
[5] Instituto de Hidrología, Meteorología y Estudios Ambientales, «Densidad de Energía Eólica a 80 metros de Altura (W/m2)», Atlas de Viento de Colombia, 26-oct-2015. [En línea]. Disponible en: http://atlas.ideam.gov.co/basefiles/Densidad-Energia-Eolica_80m_01.pdf. [Accedido: 16-ago-2017].
[6] O. E. Ramirez Yaima, «Plan Indicativo de Expansión de Cobertura de Energía Eléctrica», UPME, nov. 2016.
[7] N. Esteve Gómez, «Energización de las zonas no interconectadas a partir de las energías renovables solar y eólica», Pontifica Universidad Javeriana, Bogotá, Colombia, 2011.
[8] S. J. Chapman, Electric Machinery Fundamentals, 5 edition. New York: McGraw-Hill Education, 2011.
26
[9] S. D. Umans, Fitzgerald & Kingsley’s Electric Machinery, 7 edition. New York: McGraw-Hill Education, 2013.
[10] P. Krause, O. Wasynczuk, S. D. Sudhoff, y S. Pekarek, Analysis of Electric Machinery and Drive Systems, 3 edition. Hoboken, New Jersey: Wiley-IEEE Press, 2013.
[11] J. C. Castaño Rodríguez, «Caracterización de Generador Trifásico de Imanes Permanentes para su uso en Zonas Aisladas», Universidad de los Andes, Bogotá, Colombia, 2016.
27
Anexo 1. Planoteca
Pieza 1. Acople para Mesa
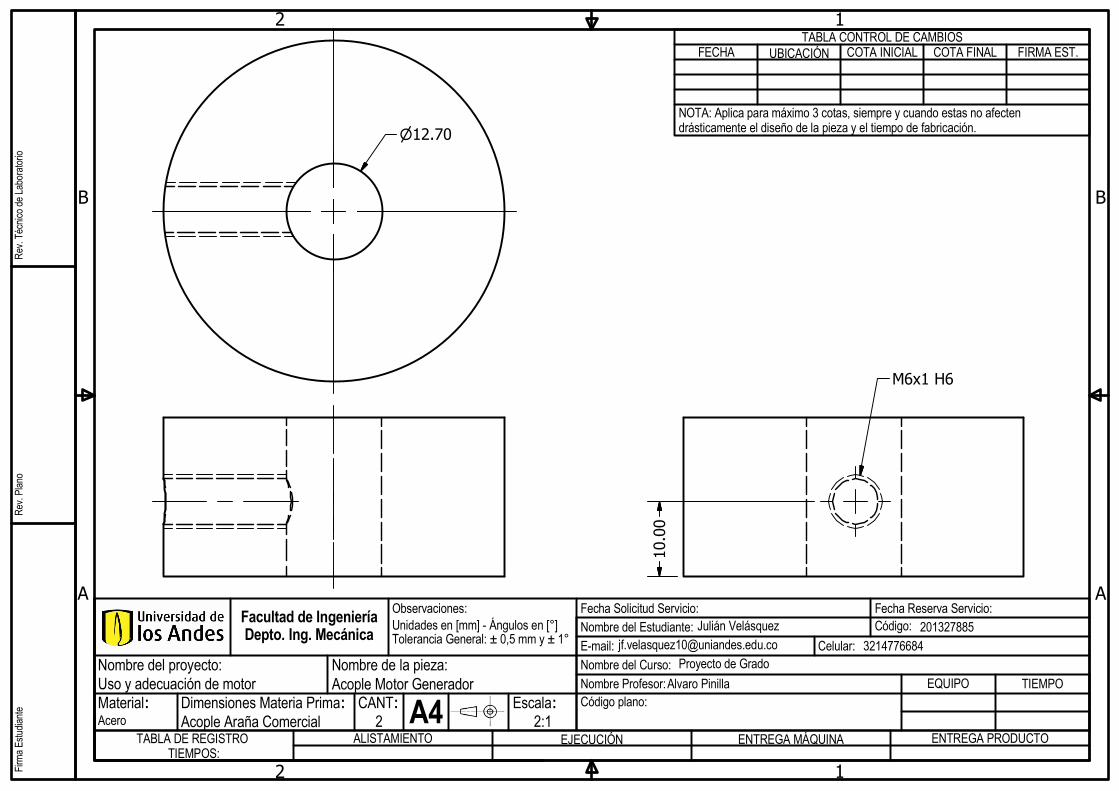
Pieza 2. Acople Motor Generador
Pieza 3. Acople Torquimetro-Siemens
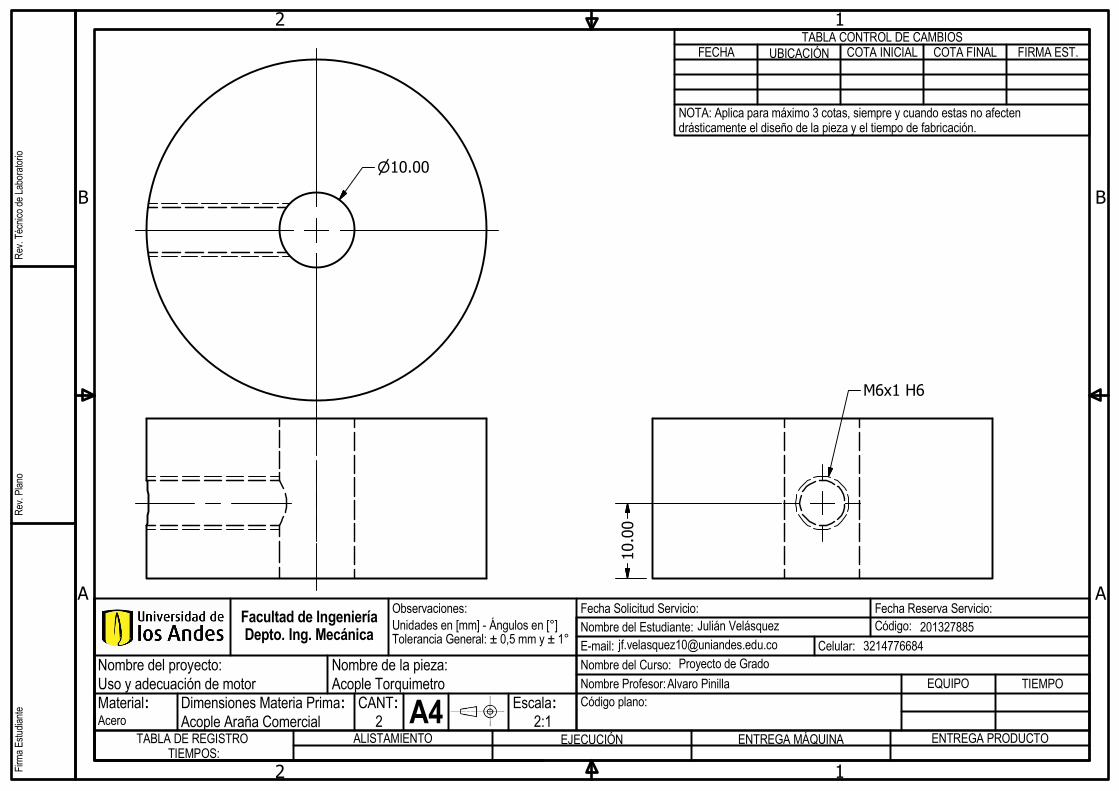
Pieza 4. Acople Torquimetro
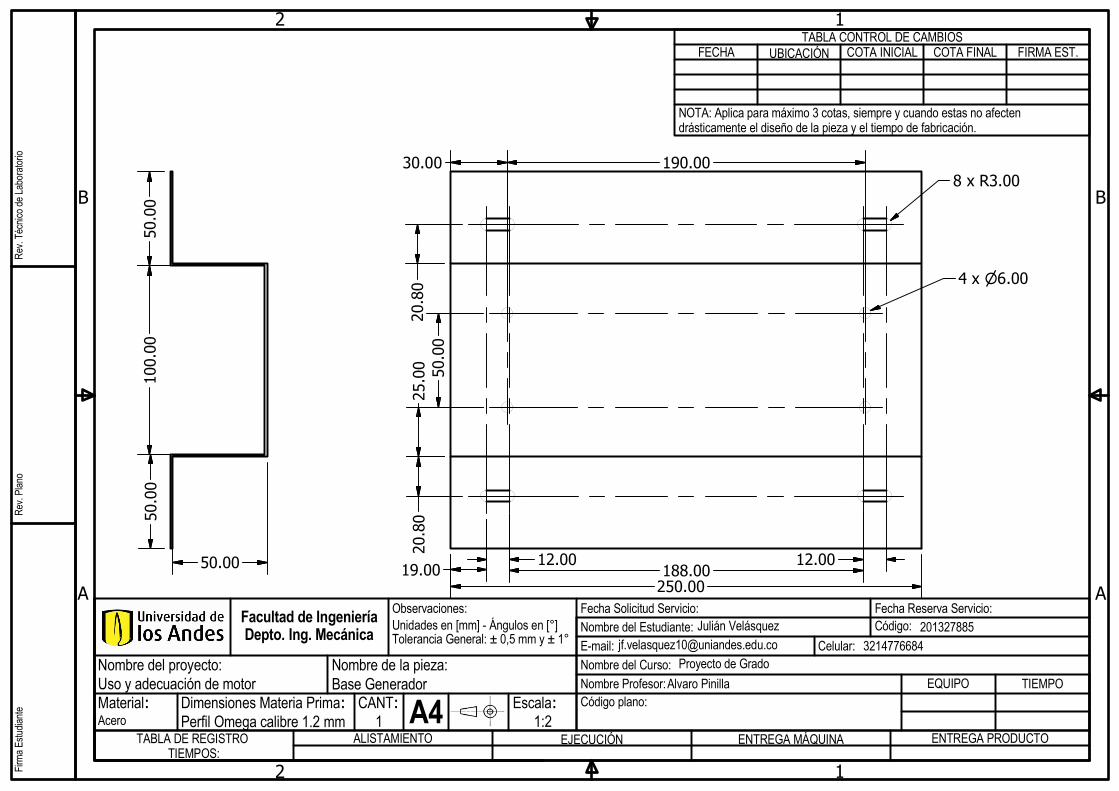
Pieza 5. Base Generador
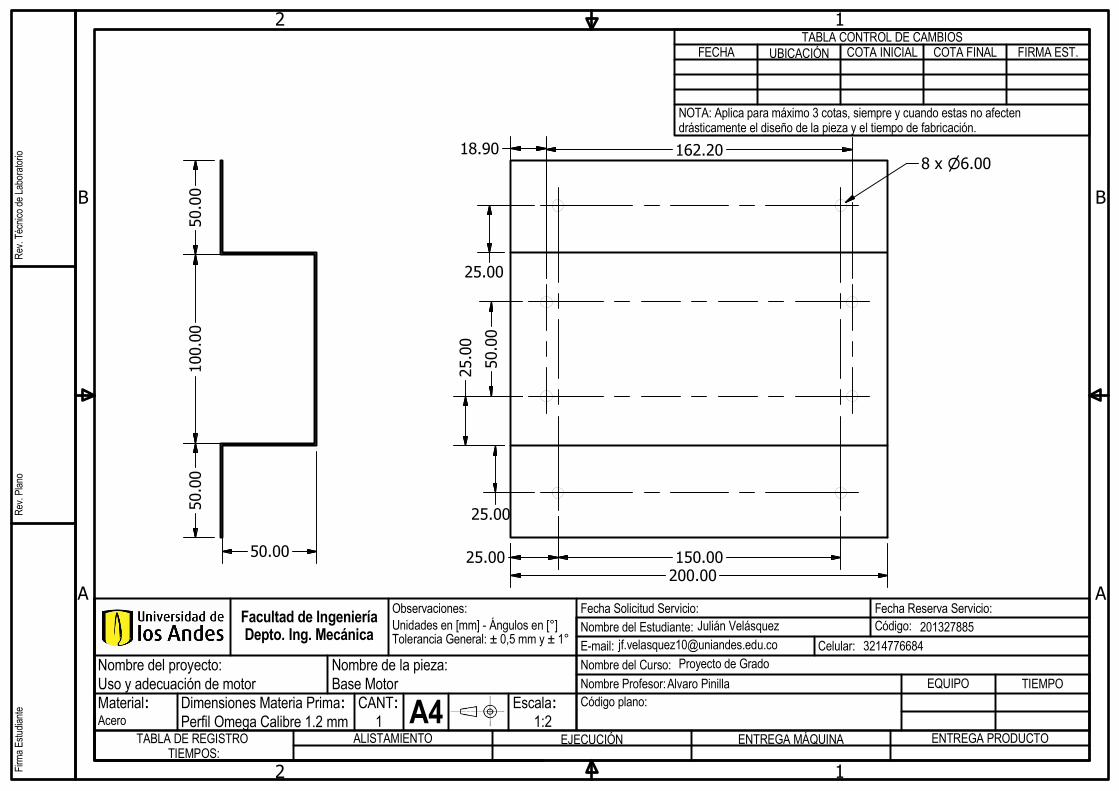
Pieza 6. Base Motor
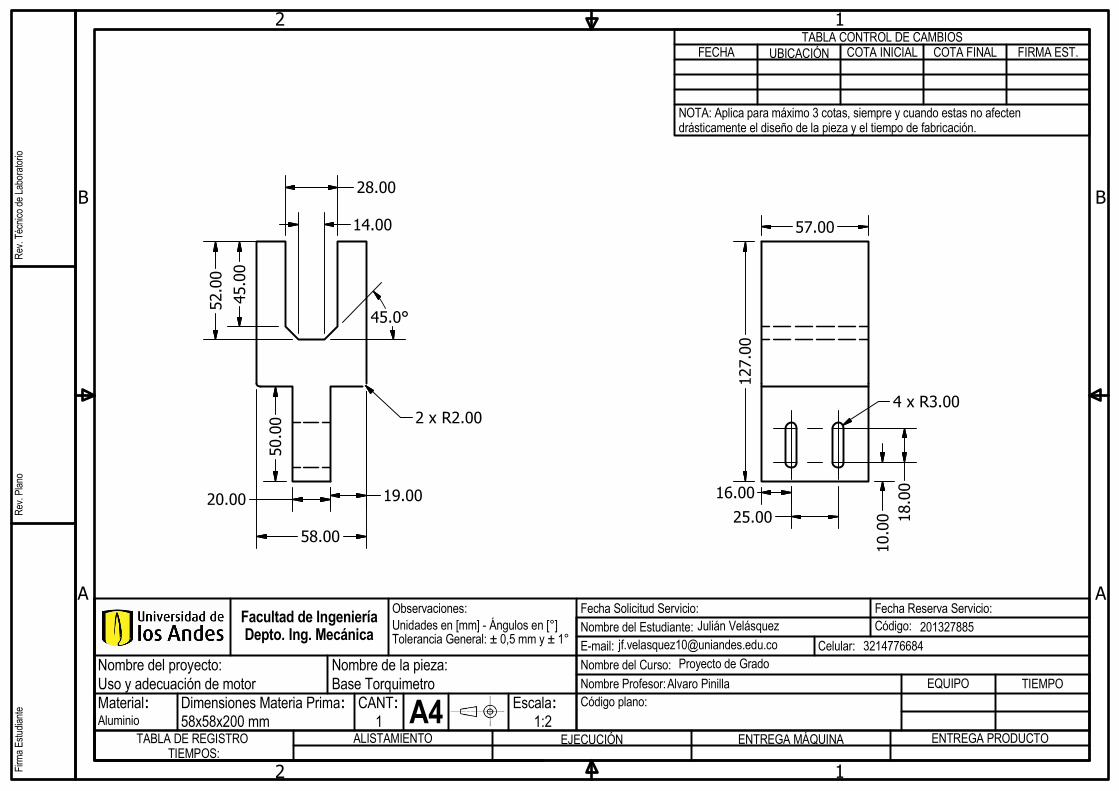
Pieza 7. Base Torquimetro

1
1
2
2
A A
B B
Rev.
Plan
oRe
v. Té
cnico
de La
bora
torio
Firma
Estu
diante
TABLA CONTROL DE CAMBIOSFECHA UBICACIÓN COTA INICIAL COTA FINAL FIRMA EST.
NOTA: Aplica para máximo 3 cotas, siempre y cuando estas no afecten drásticamente el diseño de la pieza y el tiempo de fabricación.
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto: Nombre de la pieza:Uso y adecuación de motor Acople para mesaMaterial:Aluminio
CANT:
1 A4 Escala:
1:2Código plano:
Unidades en [mm] - Ángulos en [°]Tolerancia General: ± 0,5 mm y ± 1°
TIEMPOEQUIPO
Nombre del Estudiante: Código:E-mail: Celular:Nombre del Curso:Nombre Profesor:
Observaciones: Fecha Solicitud Servicio: Fecha Reserva Servicio:
Dimensiones Materia Prima:
Ang Cuad 1,5 in C. 4.5 mm
Julián Velásquez [email protected] 3214776684
Proyecto de GradoAlvaro Pinilla
TABLA DE REGISTRO TIEMPOS:
ALISTAMIENTO EJECUCIÓN ENTREGA MÁQUINA ENTREGA PRODUCTO
38.10
38.10
4.50
6.002 x
6.002 x
57.00
4.50
16.00
25.00
25.0016.00
10.10
22.70
1
1
2
2
A A
B B
Rev.
Plan
oRe
v. Té
cnico
de La
bora
torio
Firma
Estu
diante
TABLA CONTROL DE CAMBIOSFECHA UBICACIÓN COTA INICIAL COTA FINAL FIRMA EST.
NOTA: Aplica para máximo 3 cotas, siempre y cuando estas no afecten drásticamente el diseño de la pieza y el tiempo de fabricación.
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto: Nombre de la pieza:Uso y adecuación de motor Acople Motor GeneradorMaterial:Acero
CANT:
2 A4 Escala:
2:1Código plano:
Unidades en [mm] - Ángulos en [°]Tolerancia General: ± 0,5 mm y ± 1°
TIEMPOEQUIPO
Nombre del Estudiante: Código:E-mail: Celular:Nombre del Curso:Nombre Profesor:
Observaciones: Fecha Solicitud Servicio: Fecha Reserva Servicio:
Dimensiones Materia Prima:
Acople Araña Comercial
Julián Velásquez [email protected] 3214776684
Proyecto de GradoAlvaro Pinilla
TABLA DE REGISTRO TIEMPOS:
ALISTAMIENTO EJECUCIÓN ENTREGA MÁQUINA ENTREGA PRODUCTO
12.70
10.00
M6x1 H6

1
1
2
2
A A
B B
Rev.
Plan
oRe
v. Té
cnico
de La
bora
torio
Firma
Estu
diante
TABLA CONTROL DE CAMBIOSFECHA UBICACIÓN COTA INICIAL COTA FINAL FIRMA EST.
NOTA: Aplica para máximo 3 cotas, siempre y cuando estas no afecten drásticamente el diseño de la pieza y el tiempo de fabricación.
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto: Nombre de la pieza:Uso y adecuación de motor Acople Torquimetro SIEMENSMaterial:Acero
CANT:
1 A4 Escala:
2:1Código plano:
Unidades en [mm] - Ángulos en [°]Tolerancia General: ± 0,5 mm y ± 1°
TIEMPOEQUIPO
Nombre del Estudiante: Código:E-mail: Celular:Nombre del Curso:Nombre Profesor:
Observaciones: Fecha Solicitud Servicio: Fecha Reserva Servicio:
Dimensiones Materia Prima:
Acople Araña Manufacturado
Julián Velásquez [email protected] 3214776684
Proyecto de GradoAlvaro Pinilla
TABLA DE REGISTRO TIEMPOS:
ALISTAMIENTO EJECUCIÓN ENTREGA MÁQUINA ENTREGA PRODUCTO
10.00
1
1
2
2
A A
B B
Rev.
Plan
oRe
v. Té
cnico
de La
bora
torio
Firma
Estu
diante
TABLA CONTROL DE CAMBIOSFECHA UBICACIÓN COTA INICIAL COTA FINAL FIRMA EST.
NOTA: Aplica para máximo 3 cotas, siempre y cuando estas no afecten drásticamente el diseño de la pieza y el tiempo de fabricación.
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto: Nombre de la pieza:Uso y adecuación de motor Acople TorquimetroMaterial:Acero
CANT:
2 A4 Escala:
2:1Código plano:
Unidades en [mm] - Ángulos en [°]Tolerancia General: ± 0,5 mm y ± 1°
TIEMPOEQUIPO
Nombre del Estudiante: Código:E-mail: Celular:Nombre del Curso:Nombre Profesor:
Observaciones: Fecha Solicitud Servicio: Fecha Reserva Servicio:
Dimensiones Materia Prima:
Acople Araña Comercial
Julián Velásquez [email protected] 3214776684
Proyecto de GradoAlvaro Pinilla
TABLA DE REGISTRO TIEMPOS:
ALISTAMIENTO EJECUCIÓN ENTREGA MÁQUINA ENTREGA PRODUCTO
10.00
M6x1 H6
10.00
1
1
2
2
A A
B B
Rev.
Plan
oRe
v. Té
cnico
de La
bora
torio
Firma
Estu
diante
TABLA CONTROL DE CAMBIOSFECHA UBICACIÓN COTA INICIAL COTA FINAL FIRMA EST.
NOTA: Aplica para máximo 3 cotas, siempre y cuando estas no afecten drásticamente el diseño de la pieza y el tiempo de fabricación.
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto: Nombre de la pieza:Uso y adecuación de motor Base GeneradorMaterial:Acero
CANT:
1 A4 Escala:
1:2Código plano:
Unidades en [mm] - Ángulos en [°]Tolerancia General: ± 0,5 mm y ± 1°
TIEMPOEQUIPO
Nombre del Estudiante: Código:E-mail: Celular:Nombre del Curso:Nombre Profesor:
Observaciones: Fecha Solicitud Servicio: Fecha Reserva Servicio:
Dimensiones Materia Prima:
Perfil Omega calibre 1.2 mm
Julián Velásquez [email protected] 3214776684
Proyecto de GradoAlvaro Pinilla
TABLA DE REGISTRO TIEMPOS:
ALISTAMIENTO EJECUCIÓN ENTREGA MÁQUINA ENTREGA PRODUCTO
50.00
100.00
50.00
50.00
50.00
25.00
20.80
20.80
250.00
12.00
19.00188.00
12.00
R3.008 x
6.004 x
190.0030.00
1
1
2
2
A A
B B
Rev.
Plan
oRe
v. Té
cnico
de La
bora
torio
Firma
Estu
diante
TABLA CONTROL DE CAMBIOSFECHA UBICACIÓN COTA INICIAL COTA FINAL FIRMA EST.
NOTA: Aplica para máximo 3 cotas, siempre y cuando estas no afecten drásticamente el diseño de la pieza y el tiempo de fabricación.
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto: Nombre de la pieza:Uso y adecuación de motor Base MotorMaterial:Acero
CANT:
1 A4 Escala:
1:2Código plano:
Unidades en [mm] - Ángulos en [°]Tolerancia General: ± 0,5 mm y ± 1°
TIEMPOEQUIPO
Nombre del Estudiante: Código:E-mail: Celular:Nombre del Curso:Nombre Profesor:
Observaciones: Fecha Solicitud Servicio: Fecha Reserva Servicio:
Dimensiones Materia Prima:
Perfil Omega Calibre 1.2 mm
Julián Velásquez [email protected] 3214776684
Proyecto de GradoAlvaro Pinilla
TABLA DE REGISTRO TIEMPOS:
ALISTAMIENTO EJECUCIÓN ENTREGA MÁQUINA ENTREGA PRODUCTO
50.00
100.00
50.00
50.00
200.00
25.00 150.00
25.00
25.00
50.00
25.00
6.008 x
18.90
162.20
1
1
2
2
A A
B B
Rev.
Plan
oRe
v. Té
cnico
de La
bora
torio
Firma
Estu
diante
TABLA CONTROL DE CAMBIOSFECHA UBICACIÓN COTA INICIAL COTA FINAL FIRMA EST.
NOTA: Aplica para máximo 3 cotas, siempre y cuando estas no afecten drásticamente el diseño de la pieza y el tiempo de fabricación.
Facultad de IngenieríaDepto. Ing. Mecánica
Nombre del proyecto: Nombre de la pieza:Uso y adecuación de motor Base TorquimetroMaterial:Aluminio
CANT:
1 A4 Escala:
1:2Código plano:
Unidades en [mm] - Ángulos en [°]Tolerancia General: ± 0,5 mm y ± 1°
TIEMPOEQUIPO
Nombre del Estudiante: Código:E-mail: Celular:Nombre del Curso:Nombre Profesor:
Observaciones: Fecha Solicitud Servicio: Fecha Reserva Servicio:
Dimensiones Materia Prima:
58x58x200 mm
Julián Velásquez [email protected] 3214776684
Proyecto de GradoAlvaro Pinilla
TABLA DE REGISTRO TIEMPOS:
ALISTAMIENTO EJECUCIÓN ENTREGA MÁQUINA ENTREGA PRODUCTO127.00
57.00
45.0°
R3.004 x
R2.002 x
50.00
18.00
58.00
28.00
14.00
45.00
52.00
19.00
20.00
16.00
25.00
10.00