capítulo 6 el método de elementos finitos · elementosen2dy3d en cada elemento se establece una...
TRANSCRIPT
Capítulo 6
El Método de Elementos Finitos
Dr. F. Flores, marzo de 2015
6.1. Generalidades
El Método de Elementos Finitos (MEF) es una técnica para la solución numérica (aproximada)de ecuaciones diferenciales a derivadas parciales. Los aspectos principales de esta técnica son lossiguientes:
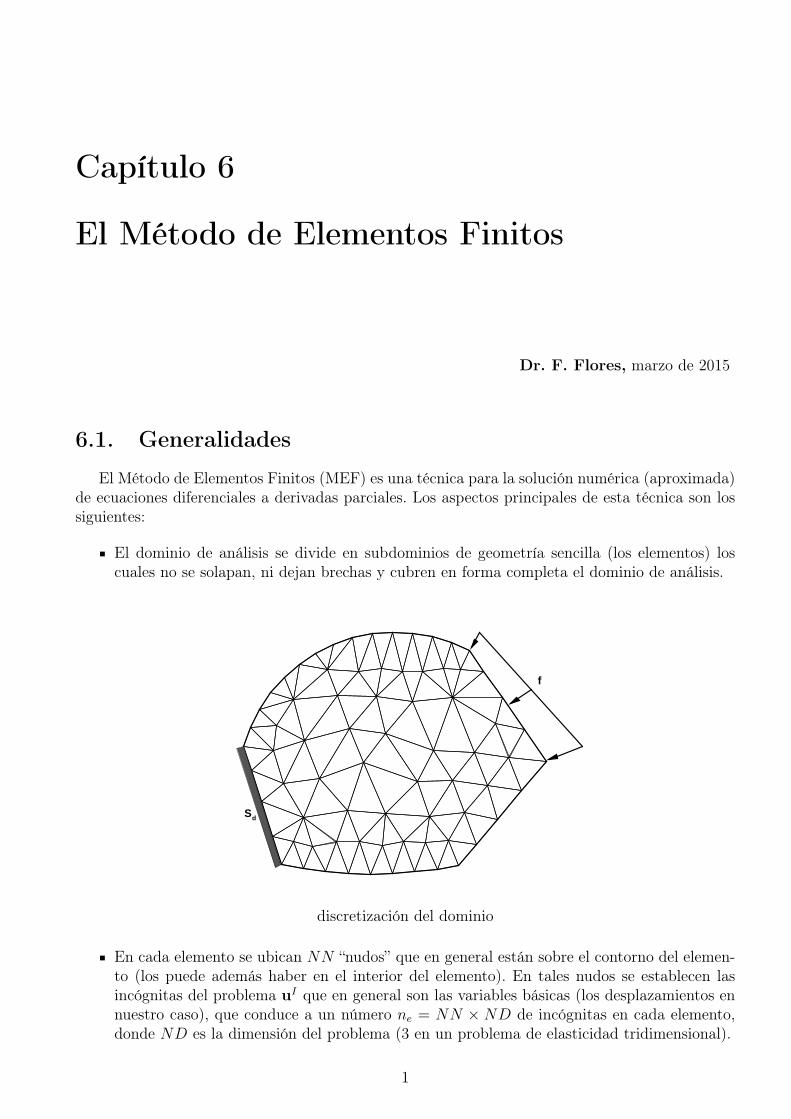
El dominio de análisis se divide en subdominios de geometría sencilla (los elementos) loscuales no se solapan, ni dejan brechas y cubren en forma completa el dominio de análisis.
Sd
f
discretización del dominio
En cada elemento se ubican NN “nudos” que en general están sobre el contorno del elemen-to (los puede además haber en el interior del elemento). En tales nudos se establecen lasincógnitas del problema uI que en general son las variables básicas (los desplazamientos ennuestro caso), que conduce a un número ne = NN × ND de incógnitas en cada elemento,donde ND es la dimensión del problema (3 en un problema de elasticidad tridimensional).
1

Elementos en 2D y 3D
En cada elemento se establece una solución aproximada u en función del conjunto ne deparámetros desconocidos en el elemento, para lo cual se interpolan las incógnitas nodales uI
usando adecuadas funciones de interpolación φ (X)
u =NN∑I=1
φI (X) uI (6.1)
Esta función aproximada debe satisfacer:
1. continuidad en todo el dominio, lo cual requiere
a) Continuidad dentro del elemento, lo cual se logra fácilmente debido a que los ele-mentos tienen geometría sencilla
b) Continuidad entre elementos, lo cual establece algunas restricciones en la elecciónde las funciones φI (X)
2. las condiciones de contorno esenciales del problema, es decir u = u en Sd. Esto se lografácilmente pues las incógnitas nodales son precisamente las u, con lo cual basta fijar enlos nudos sobre Sd los valores correspondientes.
A partir de las condiciones impuestas de continuidad y sobre Sd la cantidad de incógnitasdel problema NI resulta del número total de nudos NT menos los valores fijados sobre elcontorno NR
NI = NT ×ND −NR
La función aproximada (6.1) se introduce en una expresión integral escalar equivalente a laecuación diferencial a resolver (formulación débil). El hecho de que se tenga una expresiónintegral escalar permite sumar las contribuciones de cada elemento en una única integral.
En la expresión integral aparece una segunda función v (la función de prueba) la cual enel MEF se escribe en función de la misma cantidad de parámetros por elemento ne que la
2

función aproximada u. Aquí utilizaremos funciones de prueba idénticas a las funciones deaproximación
v =NN∑I=1
φI (X) vI (6.2)
lo cual automáticamente conduce a que v sea también continua en todo el dominio. Por otrolado exigiremos que v = 0 en Sd lo cual se logra sencillamente haciéndola 0 en aquellos nudossobre Sd. Esto conduce a que la función de prueba v quede también definida en función deNI valores.
La condición integral debe anularse para cualquier valor de la función de prueba, es decir paratoda combinación de los parámetros vI . Esto establece la misma cantidad de condicionesque de incógnitas, lo cual permite plantear un sistema de ecuaciones de solución única.
Una vez obtenidos las incógnitas nodales, se tendrá un campo de desplazamientos aproxi-mado con el cual es posible evaluar las deformaciones y con ellas las tensiones.
En la próxima sección se describe en más detalle la expresión integral.
6.2. El Método de Residuos Ponderados y el MEF
El método de residuos ponderados es una técnica numérica que permite aproximar una funcióno la solución de una ecuación diferencial y que puede utilizarse como base para la formulación delMEF. A continuación se describen sus aspectos principales aplicado a la solución del problema deelasticidad lineal .
6.2.1. Formulación integral
La idea de esta técnica es:
(a) dada una ecuación diferencial a resolver (∇·σ+F = 0), proponemos una solución aproximadau en función de un conjunto de NI parámetros indeterminados. Esta solución u debe satis-facer las condiciones de contorno esenciales u = u en Sd y ser continua en todo el dominio.Substituimos esa solución aproximada en la ecuación diferencial, la que en general no podrásatisfacer en todo el dominio dando lugar a un residuo r en cada punto X del dominio V
r (u) = ∇ ·(C : ∇simu
)+ F = ∇ · σ + F (6.3)
.
(b) Proponemos una función de peso v (de la misma dimensión que u) sobre el dominio, estafunción de peso podrá tener la misma forma que la solución aproximada propuesta (en talcaso se conoce como método de Galerkin), con lo cual será continua y queda también definidaen función de un conjunto de NI parámetros independientes.
(c) Exigimos que la integral en el dominio del producto escalar del residuo de la ecuación dife-rencial r (u) por la función de peso v (se pondera el residuo) se anule para cualquier valorde los parámetros que definen la función de peso∫
V
(∇ · σ (u) + F) · v dV = 0 ∀vIj (6.4)
3

Notar que esto no asegura que se satisfaga la ec. 6.3 en todo los puntos sino sólo en forma promedio(integral). Sin embargo a medida que aumenta la cantidad de parámetros que definen a u y v lafunción tendrá mayor generalidad y en el límite obtendremos que el residuo se anula en todos lospuntos.
Por otro lado notemos que en la integral de la ec. 6.4 aparecen derivadas de las tensiones lo queimplica derivadas segundas de los desplazamientos, es decir una mayor exigencia para las funcionesde interpolación en cuanto al orden de derivación y a la continuidad entre elementos. Para evitaresto se recurre a integrar por partes (teorema de la divergencia) ese término :∫
V
v · ∇ · σ (u) dV =
∫S
v · σ · ν dS −∫V
∇v : σ dV (6.5)
donde S es el contorno del cuerpo y ν es la normal en el contorno. Si dividimos la integral sobreel contorno en Sd y Sσ y al exigir que la función de peso v se anule en Sd tendremos que∫
S
v · σ · ν dS =
∫Sσ
v · σ · ν dSσ =
∫Sσ
v · f dSσ (6.6)
donde en la última igualdad se han introducido las ecuaciones de equilibrio en el contorno delsólido.
En cuanto al segundo término de la integral por partes, notar que debido a la simetría deltensor de tensiones, la sumatoria indicada puede escribirse
−∫V
∇v : σ dV = −∫V
∇simv : σ dV (6.7)
Reemplazando ahora las ecuaciones 6.6 y 6.7 en la ec. 6.5 y ésta en la ec.6.4 obtenemos que∫V
(∇ · σ (u) + F) · v dV = −∫V
∇simv : σ dV +
∫V
v · F dV +
∫Sσ
v · f dSσ = 0 (6.8)
En cuanto al término∇simv = ε (6.9)
Si reemplazamos en 6.8 primero tensiones usando constitutivas σ = D : ε y 6.9
−∫V
ε : C ε dV +
∫V
v · F dV +
∫Sσ
v · f dSσ = 0
−∫V
∇simv : C∇simu dV +
∫V
v · F dV +
∫Sσ
v · f dSσ = 0 (6.10)
con lo cual la ecuación de residuos ponderados queda escrita en términos de los desplazamientosincógnitas.
El desarrollo anterior y la expresión 6.10 sigue los mismos lineamientos que los utilizadospara obtener la formulación débil o ecuación de trabajos virtuales. La diferencia es que aquídesde el comienzo hemos introducido la noción de solución aproximada. En lo que sigue se usaráindistintamente la denominación “función de prueba” y “desplazamiento virtual” para la funciónde peso v, en esa misma línea se denominará como “trabajo virtual interno” (TVI) para el primertérmino de (6.8) o (6.10) y “trabajo virtual externo” (TVE) para los últimos términos de (6.8) o(6.10).
6.2.2. Funciones de interpolación
A continuación veremos como aplicar las ideas planteadas arriba a problemas de elasticidad endos y tres dimensiones. Para ello el MEF propone dividir el dominio V del cuerpo en subdominios o
4
elementos. Estos subdominios o elementos son típicamente triángulos y cuadriláteros en problemasplanos (2-D) y tetraedros y hexaedros en problemas espaciales (3-D).
La división en subdominios se denomina la discretización y/o malla de Elementos Finitos. Parala definición de la subdivisión son necesarias dos cosas
La definición de puntos o nudos de la malla a través de sus coordenadas
La definición de cada elemento indicando cuales son los nudos que forman parte de el. Estadefinición en general supone un orden de los nudos.
Para ejemplificar algo sencillo y conocido, en problemas de entramados, la definición de nudosincluye como tales a todos los puntos que son extremo de una barra. Definidos los anteriores, lasbarras se definen a partir de indicar cuales son sus nudos extremos, lo que unívocamente define lalongitud y orientación de la barra, así como las ecuaciones a las cuales contribuirá en el equilibrio.
En problemas bidimensionales, el ejemplo más sencillo y visualizable es el de realizar unadiscretización con triángulos de 3 nudos (uno en cada vértice). Una vez definidos todos los nudos,es decir todos los puntos donde están los vértices de los triángulos, debe definirse cada triánguloa través de indicar cuales son sus vértices. La triangularización no debe producir solapamientosentre los triángulos ni dejar brechas. Además dos triángulos vecinos, es decir que tienen un ladoen común, deben tener comunes los dos nudos que definen el lado. No es posible digamos que dostriángulos compartan medio lado (o cualquier otro porcentaje), o que tengan un lado en común perolos nudos que los definen hayan sido definidos independientemente. Además para indicar los nudosvértices de un triángulo debe elegirse un sentido de circulación, es decir deben indicarse siempreen sentido horario o anti-horario (no importa con cual vértice se comienza). No es esta la únicaposibilidad para triángulos, por ej. es posible definir triángulos de lados curvos utilizando paracada lado del triángulo, no sólo sus extremos sino además un punto intermedio. Cosas similarespueden decirse respecto a los elementos cuadriláteros y los elementos en tres dimensiones.
Restrinjamos nuestra atención a un elemento, prescindiremos del sombrero sobre las variablesaproximadas. Supongamos que los campos de desplazamientos que vamos a considerar tienen laforma (6.1) donde uI son los desplazamientos del nodo (la dimensión del vector u sera 2 enproblemas planos y 3 en problemas espaciales) y las φI son las funciones de interpolación elegidasconvenientemente.
Para las funciones de prueba (o desplazamientos virtuales) la aproximación es similar (6.2).Notar que esta definición del campo de desplazamientos virtuales representa una restricción a lasecuaciones de T.V. ya que el P.T.V. exige que la igualdad se satisfaga para cualquier desplaza-miento virtualδu y aquí estamos proponiendo un campo de desplazamientos virtuales que dependede un número finito de parámetros y por ende no puede representar “cualquier” campo. Esto, dehecho, es lo que ocurre en cualquier discretización numérica.
Obviamente tampoco la interpolación de los campos de desplazamientos reales u es completa,y se obtendrá sólo una solución aproximada, cuya precisión en general mejorará cuantos máselementos se incluyan en la discretización. Esto difiere en general del caso de estructuras de vigasy barras donde es posible obtener la solución exacta de la ecuación diferencial con condiciones decontorno generales, cosa que en problemas de más de una dimensión sólo es posible obtener paracasos particulares.
Las funciones de interpolación φI deben satisfacer ciertas condiciones mínimas
1. Para que los uI tengan el significado físico propuesto debe ocurrir que valuando la ec.6.1 enlas coordenadas de un nudo resulte
u(XI) =NN∑I=1
φJ(XI) uJ = uI (6.11)
5

por lo que siendo los uJ independientes debe satisfacerse que
φJ(xI) = δIJ
{φI(xI) = 1φJ(xI) = 0 (I 6= J)
(6.12)
2. la suma de las funciones φI debe ser 1, esto asegura que si todos los nudos se desplazan lomismo uc (movimiento de cuerpo rígido) todo los puntos del elemento se desplazan igual
u(X) =NN∑I=1
φJ(X) uc = uc
NN∑I=1
φJ(X)︸ ︷︷ ︸1
= uc (6.13)
3. Deben ser derivables hasta por lo menos el orden de derivación en que aparecen en lasecuaciones a resolver. Por ej. en la ec. 6.18 aparece
εij =1
2
(∂uj∂Xı
+∂uı∂Xj
)(6.14)
por lo que los u deben poderse derivar al menos una vez, lo que implica por lo menoscontinuidad de los u
4. El desplazamiento en la interfaz entre dos elementos debe ser el mismo independientementedel elemento desde el cual se lo evalúe, ésto es necesario para asegurar continuidad de des-plazamientos en todo el dominio y mantener al sólido en su calidad de continuo (sin brechasni solapamientos). Esto se consigue utilizando funciones de forma nodales φI que valgan 0sobre los lados del elemento que no incluyan al nudo I.
Notar que lo que se exige en la tercera condición es que las derivadas de u existan, para lo cualu debe ser continuo, pero no se exige que las derivadas mismas sean continuas. Esto último serefiere a la continuidad en la interfaz entre elementos, pues lograr la continuidad de las derivadasdentro de un elemento es inmediato si se utilizan polinomios para las funciones de forma.
Resulta importante observar que si bien se han propuesto campo similares para la interpolaciónde los desplazamientos reales y virtuales, en los puntos donde los desplazamientos reales sonconocidos (Sd) los desplazamientos virtuales son nulos (recordar la definición de las funciones deprueba). En consecuencia en dichos puntos el desplazamiento real no es incógnita del problema yel desplazamiento virtual es nulo y no establece una condición de equilibrio.
6.2.3. Notación vectorial de tensores
Recordemos la definición de deformaciones y tensiones en notación matricial (notación deVoigt), Definido el campo de desplazamientos aproximados
u =
u1u2u3
=
φ1 φ2 φNN
φ1 φ2 ... ... ... φNN
φ1 φ2 φNN
︸ ︷︷ ︸
Φ
u11u12u13......uNN1
uNN2
uNN3
︸ ︷︷ ︸
ue
(6.15)
6

donde se han agrupado los desplazamientos nodales del elemento en un vector uTe =[u1,u2, ....,uNN
]y similarmente para las funciones de prueba
v = Φve (6.16)
es posible encontrar las deformaciones asociadas
εij =1
2
(∂uj∂xi
+∂ui∂xj
)=
1
2
NN∑I=1
(∂φI
∂xjuIi +
∂φI
∂xiuIj
)(6.17)
Por razones de conveniencia escribiremos las deformaciones εij en forma de un arreglo unidi-mensional (vector)
ε =
ε11ε22ε332ε122ε232ε13
6×1
=NN∑I=1
φI′1
φI′2φI′3
φI′2 φI′1φI′3 φI′2
φI′3 φI′1
6×3
uI1uI2uI3
3×1
(6.18)
ε =NN∑I=1
BI6×3 uI3×1 = B6×3NN ue (6.19)
donde hemos usado la notación φI′i = ∂φI
∂xi. La matriz B que relaciona deformaciones con despla-
zamientos se obtiene agrupando en forma similar las BI .
B =[B1,B2, ....,BNN
](6.20)
dada la similitud de las definiciones de v y u resulta
ε = B ve (6.21)
Resulta necesario definir las relaciones constitutivas del problema. Por simplicidad utilizaremosun material lineal elástico. Al igual que con las deformaciones, agrupemos las tensiones en formade vector
σ =
σ11σ22σ33σ12σ23σ31
=E
1 + ν
1−ν1−2ν
ν1−2ν
ν1−2ν
ν1−2ν
1−ν1−2ν
ν1−2ν
ν1−2ν
ν1−2ν
1−ν1−2ν
12
12
12
ε11ε22ε332ε122ε232ε13
= Cε (6.22)
6.2.4. Matrices de rigidez elemental y global
Veamos entonces de introducir estas definiciones en la expresión del TVI de la ec. 6.8∫V
ε · σ dV =
∫V
(σ11ε11 + σ22ε22 + σ33ε33 + 2σ12ε12 + 2σ23ε23 + 2σ13ε13) dV (6.23)
donde hemos hecho uso de la simetría de los tensores de tensión y deformación. Es fácil ver que apartir de la definición de los vectores ε y σ en las ecuaciones 6.18 y 6.22∫
V
ε · σ dV =
∫V
εTσ dV =NE∑e=1
vTe
∫ve
BT C B dv ue (6.24)
7

donde NE es el número de elementos en que se ha dividido el dominio. La integral indicada en elúltimo miembro (obervar que es la integral sobre un dominio elemental) es una matriz cuadrada dene×ne simétrica (lo que surge de que C es simétrica), se la denomina matriz de rigidez elementaly se la denota por:
Ke =
∫ve
BT C B dv (6.25)
El trabajo virtual interno del sólido a partir de la suma de las contribuciones elementalesresulta ∫
V
εTσ dV =NE∑e=1
vTe Ke ue = vTG K uG (6.26)
donde uG es un vector donde se han ordenado los desplazamientos de todos los nudos y K esla matriz de rigidez global del sólido, la cual se obtiene mediante un proceso de ensamble de lasmatrices elementales.
6.2.5. Trabajo virtual externo, vector de cargas nodales
Las contribuciones al trabajo virtual externo (fuerzas másicas y de contorno) resultan:(a) Fuerzas másicas ∫
V
vTF dV =NE∑e=1
∫ve
vTF dv (6.27)
Supongamos que la fuerza másica es constante dentro del elemento de valor igual a la densidaddel material ρ por el campo gravitatorio b, esto es:
F = ρb (6.28)
en tanto que los desplazamientos virtuales se pueden escribir igual que (6.15)
v =
φ1 φ2 φNN
φ1 φ2 ... ... ... φNN
φ1 φ2 φNN
︸ ︷︷ ︸
Φ
v11v12v13......vNN1
vNN2
vNN3
︸ ︷︷ ︸
ve
(6.29)
Llevando a la ec.6.27 ∫ve
vTF dv = vTe
∫ve
ΦT dv ρg = vTe Ge (6.30)
donde el vector Ge tiene la misma dimensión de ve.(b)Fuerzas de contornoPara el trabajo virtual de las fuerzas de contorno, sólo se considera sobre aquellos elementos
que tengan un lado (modelos 2D) o cara (modelos 3D) coincidente con el contorno donde seconocen las fuerzas exteriores. Sea entonces un elemento cualquiera sobre el contorno del cuerpoque tiene cargas actuantes sobre una de sus caras. Dicha cara estará definida por un subconjuntode los nudos del elemento NC. Notar que debido a las exigencias impuestas sobre las funciones deinterpolación, los desplazamientos (reales y virtuales) sobre una cara del elemento dependen sólo
8

de los nudos sobre el lado o cara es decir sobre el subconjunto NC. Los desplazamientos virtualesallí pueden entonces escribirse:
v =NC∑I=1
φIvI (6.31)
Para representar una carga externa distribuida de cierta generalidad sobre el contorno, supon-gamos que esta se describe de la misma forma
f =NC∑I=1
φI f I (6.32)
f =
φ1 φ2 φNC
φ1 φ2 ... ... ... φNC
φ1 φ2 φNC
︸ ︷︷ ︸
Φ
f 11
f 12
f 13
...
...fNC1
fNC2
fNC3
︸ ︷︷ ︸
fe
(6.33)
Donde f ij indica el valor de la fuerza externa distribuida en el nudo i en la dirección j. Reem-plazando en la expresión del trabajo virtual de las fuerzas de contorno, tenemos que:∫
Se
vT f dSe = vTe
∫Se
ΦT Φ dSe fe = vTe ge (6.34)
Similarmente al caso de la matriz de rigidez, se obtiene un vector global de cargas nodalesequivalentes r ensamblando las contribuciones de las fuerzas másicas elementales y de las fuerzasde contorno. El trabajo virtual externo puede escribirse en forma compacta como:
−∫V
vTF dV −∫Sσ
vT f dSσ = −vTG r (6.35)
Sumando entonces trabajo virtual interno mas externo e igualando a 0.∫v
εTσ dv −∫v
vTF dv −∫Sσ
vT f dSσ = 0 (6.36)
vTG K uG − vTG r = 0 (6.37)vTG [K uG − r] = 0 (6.38)
Finalmente la condición impuesta por el PTV requiere que los vG puedan tomar cualquier valoren forma independiente lo que conduce al siguiente sistema de ecuaciones lineales simultáneas
K uG = r (6.39)
6.3. Elemento triangular de tres nodosPara el abordaje de problemas que a partir de hipótesis geométricas y de solicitaciones pueden
definirse como bi-dimensionales, los elementos finitos usuales son triángulos y cuadriláteros.La base del MEF es desarrollar las expresiones para un elemento arbitrario de ciertas carac-
terísticas (por ejemplo un triángulo de 3 nudos como veremos a continuación) y luego aplicarlasen forma sistemática a todos los elementos de la malla. En tal desarrollo los nudos tienen unanumeración local (I = 1..NN) independiente de la numeración global, la cual luego si se usa enel proceso de ensamble.
9

6.3.1. Funciones de interpolación
Este es el elemento bidimensional más sencillo. Los desplazamientos incógnitas son los desus tres vértices uI =
{uI1, u
I2
}(dos por vértice), luego el campo de desplazamientos dentro del
elemento se interpolará en función de 6 (seis) incógnitas.
u (x1, x2) =3∑I=1
φI (x1, x2) uI (6.40)
El índice I varía entre 1 y 3 independientemente de la numeración global que tengan los nudos,en lo que sigue para cada elemento el índice I indica la numeración local al elemento.
Veamos como obtener las funciones de interpolación φI (x1, x2), que satisfagan las condicionesindicadas en (6.12) y posteriores. Para ello consideremos un triángulo rectángulo con lados rectosde longitud unitaria coincidentes con las direcciones coordenadas y con el vértice recto coincidien-do con el origen de coordenadas. A este triángulo lo denominaremos “triángulo maestro” y nospermitirá definir/obtener fácilmente las funciones de interpolación.
1 2
3
0 1
0
1
ξ
η
Figura 6.1: Triángulo maestro
Analicemos las tres funciones siguientes
φ1 (ξ, η) = 1− ξ − ηφ2 (ξ, η) = ξ (6.41)φ3 (ξ, η) = η
Observemos que estas tres funciones cumplen las condiciones pedidas, pues evaluadas en cadauno de los vértices valen alternativamente 1 en el vértice asociado y 0 en los otros dos. Por ejemplola segunda de las funciones evaluada en el nudo 2 (ξ = 1, η = 0) vale 1, en tanto que evaluada enlos nudos 3 (ξ = 0, η = 1) y 1 (ξ = 0, η = 0) vale 0. Notar además que todas las funciones sonlineales en ambas coordenadas, luego la función φ2 vale 0 no sólo en los nudos 1 y 3 sino en todo ellado 1-3, además variará linealmente entre 0 en los nudos 1 y 3 hasta 1 en el nudo 2. Esto significalo siguiente, que a lo largo del lado 1-3, la interpolación de las variables de desplazamientos nodepende del valor de la variable en el nudo 2, y que en cualquiera de los lados el desplazamientovaría linealmente entre los desplazamientos de los nudos extremos del lado.
Daremos una interpretación geométrica a estas funciones de interpolación. Consideremos unpunto Q cualquiera en el interior del triángulo con coordenadas (ξ, η) (Figura 6.2), si trazamos lasrectas que unen el punto con los vértices el triángulo, este queda dividido en tres triángulos cuyas
10

áreas son respectivamente (ver Figura 6.2)
triángulo Q31 de área A2 =ξ
2
triángulo Q12 de área A3 =η
2
triángulo Q23 de área A1 =1
2− ξ
2− η
2
Las áreas se han designado con el índice correspondiente al nudo opuesto al triángulo consi-derado. Notar que A1 surge fácilmente de que el área total del triángulo maestro es A = 1
2. luego
las funciones de interpolación pueden reescribirse como
φ1 (ξ, η) =A1
A= 1− ξ − η
φ2 (ξ, η) =A2
A= ξ (6.42)
φ3 (ξ, η) =A2
A= η
Es decir como la relación entre el área asociada al nudo y el área total.
0 1
0
1
ξ=φ1
η=φ2
η/2
ξ/2(1−ξ−η)/2
Q1
2
3
X1
X2
A1
A3
A2P
Figura 6.2: Coordenadas de área
Consideremos ahora un triángulo arbitrario en el plano x1 − x2 . Asociemos a cada vértice deeste triángulo un nudo en el elemento maestro. Un punto cualquiera P del triángulo de coordenadas(x1, x2) define junto con los vértices tres nuevos triángulos en forma análoga al caso del triángulomaestro, luego es posible definir las funciones de forma en el espacio x1 − x2 de la forma
φ1 (x1, x2) =A1 (x1, x2)
A
φ2 (x1, x2) =A2 (x1, x2)
A(6.43)
φ3 (x1, x2) =A3 (x1, x2)
A
Veamos como calcular estas áreas A y AI . Por las propiedades del producto vectorial tenemos
2A =∥∥(x2 − x1
)×(x3 − x1
)∥∥ (6.44)
11

Donde las xI son las coordenadas de cada unos de los vértices. Para sistematizar estos cálculos,definimos los vectores lados del triángulo lI designando cada uno de ellos de la misma forma quelas áreas, es decir en función del vértice opuesto, así tendremos (sentido de circulación antihorario)
l1 = x3 − x2
l2 = x1 − x3 (6.45)l3 = x2 − x1
A las proyecciones de estos lados sobre los ejes x1 y x2 las denominaremos respectivamente poraI y bI , de esta forma
a1 = x31 − x21 a2 = x11 − x31 a3 = x21 − x11b1 = x32 − x22 b2 = x12 − x32 b3 = x22 − x12 (6.46)
1
2
3
l3
l1l2
a3
a1a2
b1
b2
b3
Figura 6.3: Proyecciones de los lados
Luego el área del triángulo puede calcularse como
2A =∥∥l3 × (−l2
)∥∥ =
∣∣∣∣ a3 b3
−a2 −b2∣∣∣∣ = a2b3 − a3b2 (6.47)
En forma similar el área del triángulo 1 vale
2A1 =∥∥l1 × (xP − x2
)∥∥ =
∣∣∣∣ a1 b1
x1 − x21 x2 − x22
∣∣∣∣ = a1(x2 − x22
)− b1
(x1 − x21
)(6.48)
desarrollando2A1 = a1x2 − b1x1 − a1x22 + b1x21 (6.49)
que es una función lineal de las coordenadas del punto x1 y x2. Permutando índices se obtienenlas otras áreas. Resumiendo lo anterior tendremos
φ1 (x1, x2) =2A1
2A=
1
2A
[−b1x1 + a1x2 + b1x21 − a1x22
]φ2 (x1, x2) =
2A2
2A=
1
2A
[−b2x1 + a2x2 + b2x31 − a2x32
](6.50)
φ3 (x1, x2) =2A3
2A=
1
2A
[−b3x1 + a3x2 + b3x11 − a3x12
]12

El campo de desplazamientos puede entonces escribirse (expresión 6.1) como
u (x1, x2) =
{u1 (x1, x2)u2 (x1, x2)
}=
3∑I=1
φI (x1, x2)
{uI1uI2
}(6.51)
o en forma matricial
u =
{u1 (x1, x2)u2 (x1, x2)
}=
[φ1 φ2 φ3
φ1 φ2 φ3
]
u11u12u21u22u31u32
= Φ ue (6.52)
6.3.2. Matriz de rigidez
Para la evaluación de las deformaciones εij se requiere de las derivadas de la funciones de formaφI , al ser estas lineales, resulta sencillamente
∂φI (x1, x2)
∂x1= φI′1 =
−bI
2A
∂φI (x1, x2)
∂x2= φI′2 =
aI
2A(6.53)
Luego tendremos
ε11 =∂u1∂x1
=3∑I=1
∂φI
∂x1uI1 =
3∑I=1
−bI
2AuI1
ε22 =∂u2∂x2
=3∑I=1
∂φI
∂x2uI2 =
3∑I=1
aI
2AuI2 (6.54)
2ε12 =∂u1∂x2
+∂u2∂x1
=3∑I=1
[∂φI
∂x2uI1 +
∂φI
∂x1uI2
]=
3∑I=1
[aI
2AuI1 −
bI
2AuI2
]Que puede resumirse en la forma (ver ecuación 6.18)
ε =
ε11ε222ε12
=1
2A
−b1 −b2 −b3a1 a2 a3
a1 −b1 a2 −b2 a3 −b3
u11u12u21u22u31u32
= Bue (6.55)
donde ha quedado definida la matriz B. Notar que que al ser lineal la interpolación de los despla-zamientos, las deformaciones resultan constantes en el elemento (la matriz B es constante). Porello al triángulo de 3 nudos se lo llama “triángulo de tensión constante” (TTC) o “triángulo dedeformación constante”.
Para un Estado de Tensión Plana las ecuaciones constitutivas para un material elástico eisótropo son:
σ =
σ11σ22σ12
=E
1− ν2
1 νν 1
1−v2
ε11ε222ε12
= C ε (6.56)
13

La matriz de rigidez elemental resulta entonces de la integral (ecuación 6.25)
Ke =
∫h
∫A
BTCB dA = Ah BTCB (6.57)
En este caso tanto B como D son constantes de allí la última igualdad (h es el espesor de lapieza). En definitiva
Ke =h
4A
E
1− ν2
−b1 a1
a1 −b1−b2 a2
a2 −b2−b3 a3
a3 −b3
1 νν 1
1−v2
−b1 −b2 −b3a1 a2 a3
a1 −b1 a2 −b2 a3 −b3
Si lo que se busca resolver es un estado de deformación plana, basta cambiar la relaciónconstitutiva, en tal caso la relación tensión-deformación se escribe
σ =
σ11σ22σ12
=E
(1 + ν) (1− 2ν)
(1− ν) ν 0ν (1− ν) 0
0 0(1− 2ν)
2
ε11
ε222ε12
= Cε (6.58)
6.3.3. Términos de carga
Para la evaluación de los términos asociados a las acciones externas calculamos el trabajovirtual externo. Analicemos primero el caso de fuerzas másicas. Supongamos que la dirección deacción de la gravedad coincide con la dirección negativa del eje x2, en tal caso las fuerzas degravedad (por unidad de superficie) pueden escribirse
F =ρgh
{0−1
}(6.59)
El trabajo virtual de fuerzas másicas se calcula como
TV Ev =
∫A
v · FdA = ρgh vTe
∫A
ΦT
[0−1
]dA
TV Ev = −ρgh[v11 v12 v21 v22 v31 v32
] ∫A
0φ1
0φ2
0φ3
dA
TV Ev =[v11 v12 v21 v22 v31 v32
] −Aρgh3
010101
(6.60)
donde∫AφIdA = A
3lo que puede verse fácilmente como el volumen de una pirámide de base el
área A y altura 1 (el valor de φI en el vértice correspondiente)En el caso de fuerzas distribuidas aplicadas sobre el contorno del cuerpo, debe primero dis-
tinguirse a los elementos que tengan un lado asociado al contorno cargado. Supongamos que la
14

carga distribuida varía en forma lineal entre los dos nudos del lado del elemento en cuestión (unavariación de mayor orden de la carga no tiene sentido práctico, si hubiera una fuerte variación dela carga, debe aumentarse la discretización de tal forma que dicha variación sea aceptablementemodelada por una aproximación lineal por tramos), de esta forma, llamando 1 y 2 a los nudos quedefinen el lado del elemento
ξ f1
f2
1
2
X1
X2
f11
f21
f12
f22
Figura 6.4: Cargas en el contorno
f =
[f1f2
]=
[(1− ξ) ξ
(1− ξ) ξ
]f 11
f 12
f 21
f 22
(6.61)
donde f ij indica el valor de la carga distribuida en el nudo i en la dirección j y ξ es una variablelocal lineal con valor 0 en el primer nudo y valor 1 en el segundo nudo, que representa la longitudde arco sobre el lado dividida por la longitud del mismo (L).
0 LS
0 1ξ
1 1
1−ξ ξ
Figura 6.5: Funciones de forma local
De la misma forma pueden definirse los desplazamientos virtuales. Recordemos que los despla-zamientos en el contorno de un elemento varían en forma lineal entre los valores de sus extremos,luego
v =
[v1v2
]=
[(1− ξ) ξ
(1− ξ) ξ
]v11v12v21v22
(6.62)
15

El trabajo virtual asociado resulta (ds = Ldξ)
TV Es =
∫L
v · f ds =[v11 v12 v21 v22
] ∫ 1
0
1− ξ
1− ξξ
ξ
[ 1− ξ ξ1− ξ ξ
]Ldξ
f 11
f 12
f 21
f 22
TV Es =[v11 v12 v21 v22
] L6
2 1
2 11 2
1 2
f 11
f 12
f 21
f 22
TV Es =[v11 v12 v21 v22
] L6
2f 1
1 + f 21
2f 12 + f 2
2
f 11 + 2f 2
1
f 12 + 2f 2
2
(6.63)
6.3.4. Cargas debidas a cambios térmicos
Sea entonces un sólido representado como un estado plano y discretizado mediante triángulosde 3 nodos (TTC). Supongamos que el sólido sufre un cambio térmico a partir de un estadoindeformado libre de tensiones. Nos interesa considerar el estado de solicitaciones correspondienteen el contexto del método de elementos finitos.
Sea el cambio térmico definido a partir de los cambios de temperatura en cada nudo de la malla∆T i. Dentro de cada elemento podemos suponer la siguiente variación de temperatura (consistentecon las aproximaciones usadas hasta ahora)
∆T (x1, x2) =3∑I=1
φI∆T I (6.64)
suponiendo un estado inicial de bloqueo esto da lugar a un estado inicial de deformaciones res-tringidas de valor
ε0ii = −α ∆T (6.65)
y a un estado tensional de bloqueo (no equilibrado), que para un estado general 3D (i = 1, 3)
σ0ii = − Eα∆T
(1− 2ν)= −3Kα∆T
σ0 =
σ011
σ022
σ033
= − Eα∆T
(1− 2ν)
111
(6.66)
El estado tensional completo resulta de sumar este estado inicial más las tensiones debidas alas deformaciones calculadas a partir de los desplazamientos
σ = σ0 + Cε (6.67)
que para un Estado Plano de Tensión es (hay que liberar entonces la deformación en la direcciónx3, de tal forma de anular la tensión σ0
33):
σ =
σ11σ22σ12
= −Eα∆T
(1− v)
110
+E
(1− ν2)
1 ν 0ν 1 0
0 01− ν
2
︸ ︷︷ ︸
C
ε11ε222ε12
16

El trabajo virtual interno de un elemento resulta en este caso:
TV I = h
∫A
εTCε− εT Eα∆T
(1− v)
110
dA
donde el primer término de la integral es el TVI definido antes para la obtención de la matrizde rigidez elemental y el segundo término corresponde a las tensiones iniciales, no depende delos desplazamientos reales y contribuirá al término independiente. Reemplazando εT usando laexpresión 6.55 en el segundo término
TV IT = −hvTe
∫A
BT Eα∆T
(1− v)
110
dAy notando que en la integral el único término que no es constante es ∆T cuya integral resulta∫
A
∆T dA =
∫A
(φ1∆T 1 + φ2∆T 2 + φ3∆T 3
)dA =
A
3
(∆T 1 + ∆T 2 + ∆T 3
)= A∆TM
donde hemos definido el cambio térmico medio dentro del elemento como
∆TM =1
3
(∆T 1 + ∆T 2 + ∆T 3
)reemplazando en la expresión del TVI tenemos finalmente:
TV I = vTe hABTCBue−vTeEhα∆TM
(1− v)BT
110
TV I = vTe Keue − vTe
−b1a1
−b2a2
−b3a3
Ehα∆TM
2 (1− v)
donde es fácil distinguir por un lado el TVI debido al incremento de tensiones, que resulta idénticoal caso sin cambios térmicos, y por otro lado el TVI proveniente de las tensiones iniciales, queresulta independiente de los desplazamientos reales. Para las ecuaciones de equilibrio, el segundotérmino pasará a formar parte del término independiente como si fuese una carga a equilibrar.Notar que la suma de las componentes de este vector de pseudo-cargas es cero en ambas direcciones.
Para un Estado Plano de Deformación, la relación constitutiva está dada por la expresión 6.58y las tensiones de bloqueo son: σ0
11
σ022
σ012
= − Eα∆T
(1− 2v)
110
El TVI resulta (con h = 1 como es habitual)
TV I = vTe Keue − vTe
−b1a1
−b2a2
−b3a3
Eα∆TM
2 (1− 2v)
17
6.4. Elemento cuadrilátero de cuatro nodos∗
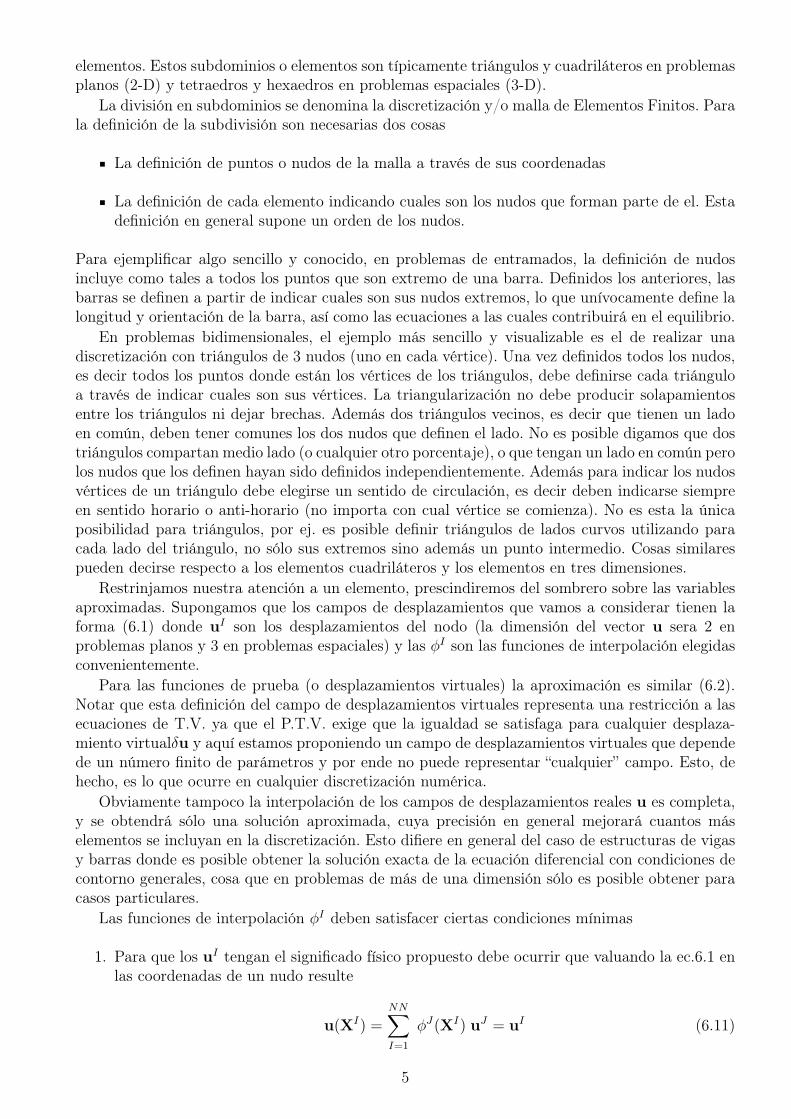
Como segundo ejemplo de un elemento sencillo obtendremos la matriz de rigidez y el vector decargas nodales equivalentes de un elemento cuadrilátero de 4 nodos para estados planos (problemasbidimensionales)
1 2
3 4
-1 0 1
-1
0
1
ξ
η
1
2
3 4
x
x2
1
Figura 6.6: Cuadrilátero de cuatro nudos
6.4.1. Funciones de interpolación, geometría y desplazamientos
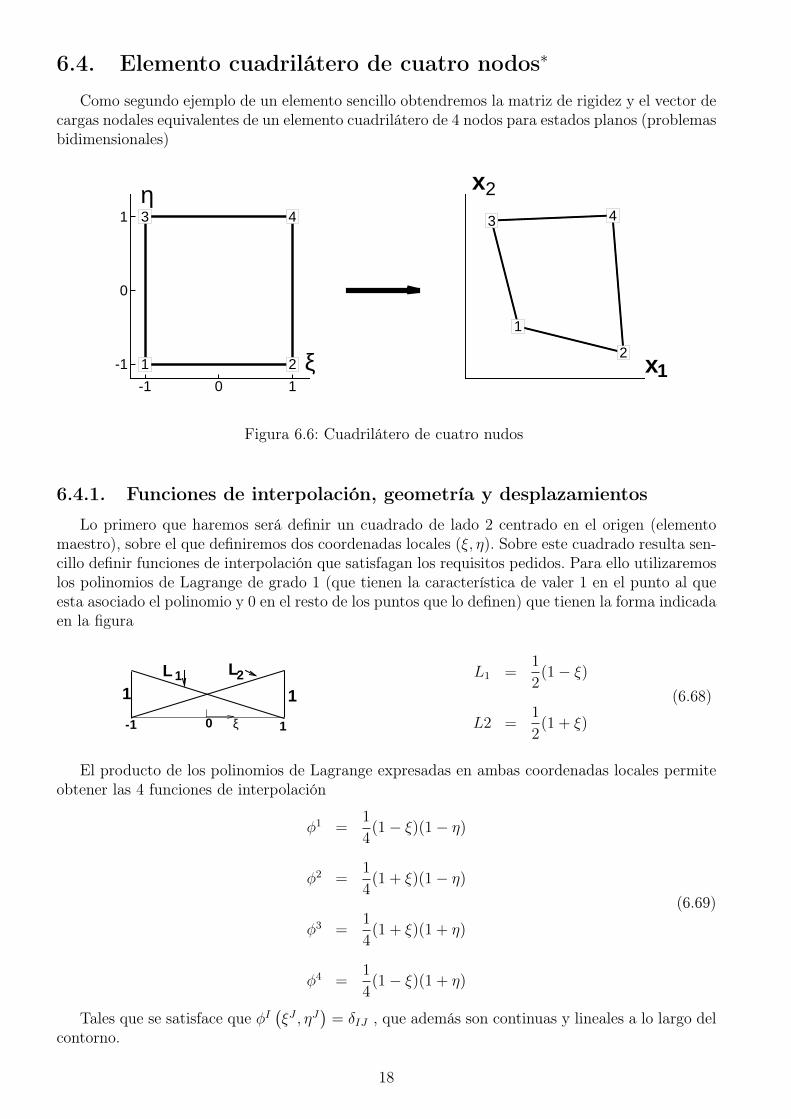
Lo primero que haremos será definir un cuadrado de lado 2 centrado en el origen (elementomaestro), sobre el que definiremos dos coordenadas locales (ξ, η). Sobre este cuadrado resulta sen-cillo definir funciones de interpolación que satisfagan los requisitos pedidos. Para ello utilizaremoslos polinomios de Lagrange de grado 1 (que tienen la característica de valer 1 en el punto al queesta asociado el polinomio y 0 en el resto de los puntos que lo definen) que tienen la forma indicadaen la figura
-1 1ξ
1 1
L L
0
1 2 L1 =1
2(1− ξ)
L2 =1
2(1 + ξ)
(6.68)
El producto de los polinomios de Lagrange expresadas en ambas coordenadas locales permiteobtener las 4 funciones de interpolación
φ1 =1
4(1− ξ)(1− η)
φ2 =1
4(1 + ξ)(1− η)
φ3 =1
4(1 + ξ)(1 + η)
φ4 =1
4(1− ξ)(1 + η)
(6.69)
Tales que se satisface que φI(ξJ , ηJ
)= δIJ , que además son continuas y lineales a lo largo del
contorno.
18

Podemos ahora definir la geometría del elemento a partir de las coordenadas de los nodos.Esto es establecer una correspondencia entre las coordenadas locales (ξ, η) y las coordenadasfísicas (x1, x2)
x (ξ, η) =4∑I=1
φI(ξ, η) xI (6.70)
Existirá una relación biunívoca entre (x1, x2) y (ξ, η) si y sólo si el determinante de la matrizde la transformación (jacobiana) es positivo en todo punto.
J =
∂x1∂ξ
∂x2∂ξ
∂x1∂η
∂x2∂η
(6.71)
Si el determinante de J es positivo en todo punto, lo que ocurrirá siempre que todos los ángulosinternos del cuadrilátero sean menores que π, es posible calcular la matriz inversa
J−1 =
∂ξ
∂x1
∂η
∂x1∂ξ
∂x2
∂η
∂x2
(6.72)
Para los desplazamientos usaremos la misma aproximación, es decir las mismas funciones deinterpolación
u (ξ, η) =4∑I=1
φI(ξ, η) uI (6.73)
que en forma desarrollada podemos escribir
[u1u2
]=
[φ1 φ2 φ3 φ4
φ1 φ2 φ3 φ4
]
u11u12u21u22u31u32u41u42
= Φ ue (6.74)
En un estado plano de tensión o deformación las deformaciones que interesan son:
ε =
ε11ε222ε12
=
∂u1∂x1∂u2∂x2
∂u1∂x2
+ ∂u2∂x1
(6.75)
Notemos que∂ ()
∂x1=∂ ()
∂ξ
∂ξ
∂x1+∂ ()
∂η
∂η
∂x1(6.76)
luego [∂()∂x1∂()∂x2
]= J−1
[∂()∂ξ∂()∂η
](6.77)
Luego si queremos calcular∂ui∂xj
=4∑I=1
∂φI
∂xjuIi (6.78)
19

para lo cual necesitamos las ∂φI
∂xjque podemos calcular mediante la regla de la cadena expresada
en la ec.6.77 [∂φI
∂x1∂φI
∂x2
]= J−1
[∂φI
∂ξ∂φI
∂η
]≡
[φI′1φI′2
]= J−1
[φI′ξφI′η
](6.79)
6.4.2. Cálculo de la matriz de rigidez elemental
Reemplazando la ec.6.78 en la ec.6.75 las deformaciones se pueden escribir
ε =
ε11ε222ε12
=
φ1′1 φ2
′1 φ3′1 φ4
′1
φ1′2 φ2
′2 φ3′2 φ4
′2
φ1′2 φ1
′1 φ2′2 φ2
′1 φ3′2 φ3
′1 φ4′2 φ4
′1
︸ ︷︷ ︸
B(ξ,η)
ue = B ue (6.80)
Para un Estado de Tensión Plana las ecuaciones constitutivas para un material elástico eisótropo son:
σ =
σ11σ22σ12
=E
1− ν2
1 νν 1
1−v2
ε11ε222ε12
= C ε (6.81)
Siguiendo el procedimiento descripto anteriormente la matriz de rigidez elemental se obtienecomo la integral
Ke =
∫v
BT (ξ, η) C B (ξ, η) dv (6.82)
Siendo todas las variables constantes en el espesor h entonces∫v
( ) dv = h
∫A
( ) dA (6.83)
La matriz B es función de (ξ, η) luego resulta necesario cambiar las variables de integración,para ello es necesario reconocer que dA = |J| dξ dη , reemplazando y cambiando los límites deintegración correspondientes resulta
Ke = h
∫ 1
−1
∫ 1
−1
BT (ξ, η) C B (ξ, η) |J| dξ dη (6.84)
En general la matriz J cambia de punto a punto (salvo que el cuadrilátero sea un paralelepípe-do) por lo que el determinante |J| y B serán función de la posición. Esto hace imposible evaluarla integral en forma cerrada por lo que es necesario recurrir a técnicas de integración numéricapara el cálculo de Ke
6.4.3. Cálculo de las fuerzas nodales equivalentes
Supongamos un valor uniforme de la fuerza másica en la dirección −x2 .
F =ρg
[0−1
]∫v
δu F dv = δuTe hρg
∫ 1
−1
∫ 1
−1
ΦT
[0−1
]|J| dξ dη = δuTe Ge (6.85)
Puede verse que el vector de fuerzas másicas resulta
Ge = −ρgh∫ 1
−1
∫ 1
−1
[0 φ1 0 φ2 0 φ3 0 φ4
]T |J| dξ dη (6.86)
20
Apéndice
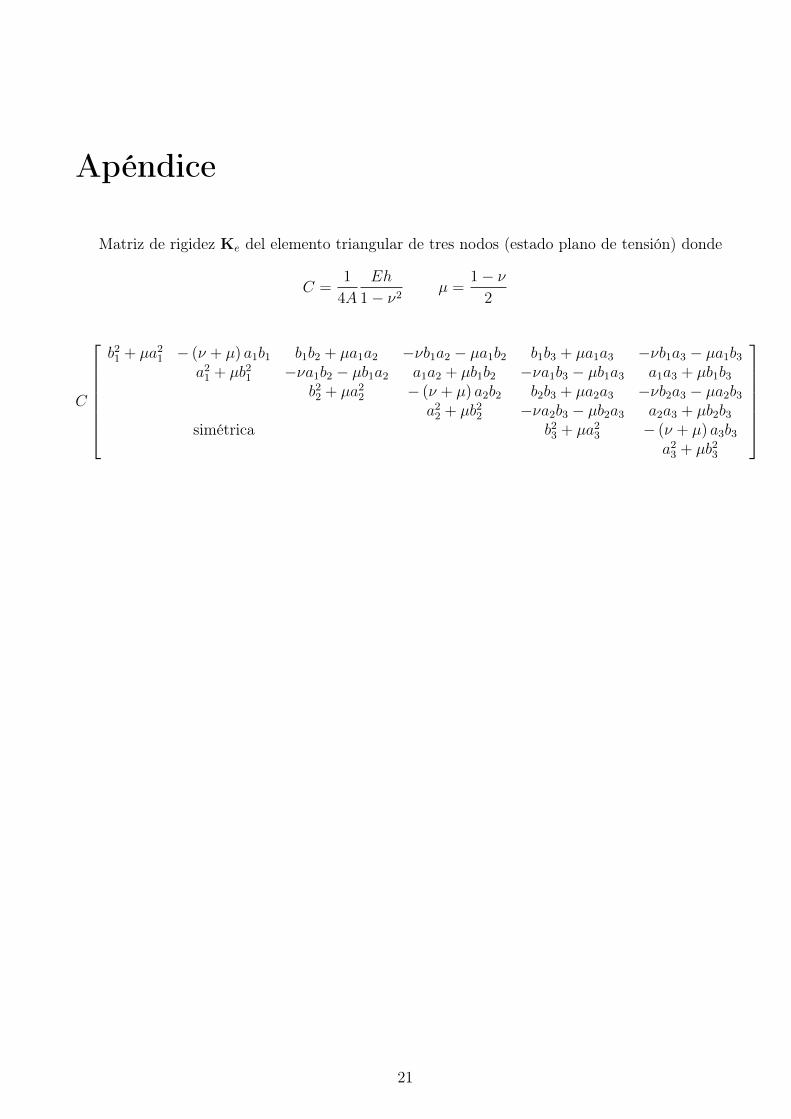
Matriz de rigidez Ke del elemento triangular de tres nodos (estado plano de tensión) donde
C =1
4A
Eh
1− ν2µ =
1− ν2
C
b21 + µa21 − (ν + µ) a1b1 b1b2 + µa1a2 −νb1a2 − µa1b2 b1b3 + µa1a3 −νb1a3 − µa1b3
a21 + µb21 −νa1b2 − µb1a2 a1a2 + µb1b2 −νa1b3 − µb1a3 a1a3 + µb1b3b22 + µa22 − (ν + µ) a2b2 b2b3 + µa2a3 −νb2a3 − µa2b3
a22 + µb22 −νa2b3 − µb2a3 a2a3 + µb2b3simétrica b23 + µa23 − (ν + µ) a3b3
a23 + µb23
21