capitulo_6
DESCRIPTION
controlTRANSCRIPT
COMPENSACIÓN DE ATRASO
Respuesta en frecuencia

Contenido

� La función principal de un compensador de atraso esproporcionar una atenuación en el rango de las frecuencias altasa fin de aportar un margen de fase suficiente al sistema
� …
Características de los compensadores de atraso
� Considere un compensador de atraso que tiene la siguiente función de transferencia
� El diagrama polar y el diagramas de bode del compensador de atraso, para �� = 2, � = 0.5 y = 5.
�( ) = �� +
1�
+1
�
= �� � + 1
� + 1 > 1
� = �� +
1�
+1
�
= 2 +
10.5
+1
5(0.5)
= 2 + 2
+ 0.4= 10
2
+ 1
0.4
+ 1

� Diagrama polar del compensador de atraso, �� = 2, � = 0.5 y = 5
0 2 4 6 8 10 12 14
-4
-3
-2
-1
0
1
2
3
4
System: sys
Real: 10
Imag: 0
Frequency (rad/sec): 0
System: sys
Real: 2
Imag: -3.2e-013
Frequency (rad/sec): 1e+013
0 dB
-10 dB-6 dB
-4 dB
-2 dB
10 dB6 dB4 dB
2 dB
Nyquist Diagram
Real Axis
Imagin
ary
Axis� = ��
+1�
+1
�
= 2 + 2
+ 0.4

� Diagrama de Bode del compensador de atraso, �� = 2, � = 0.5 y = 5
Bode Diagram
Frequency (rad/sec)
5
10
15
20
System: sys
Frequency (rad/sec): 0.4
Magnitude (dB): 17.1 System: sys
Frequency (rad/sec): 2
Magnitude (dB): 8.88M
agnitu
de (
dB
)
10-2
10-1
100
101
102
-60
-30
0
System: sys
Frequency (rad/sec): 2
Phase (deg): -33.6
System: sys
Frequency (rad/sec): 0.4
Phase (deg): -33.6
Phase (
deg)
� �� = 10
��2
+ 1
��0.4
+ 1
Filtro pasa baja
Procedimiento de compensación de atraso basadas en el enfoque de la respuesta en frecuencia
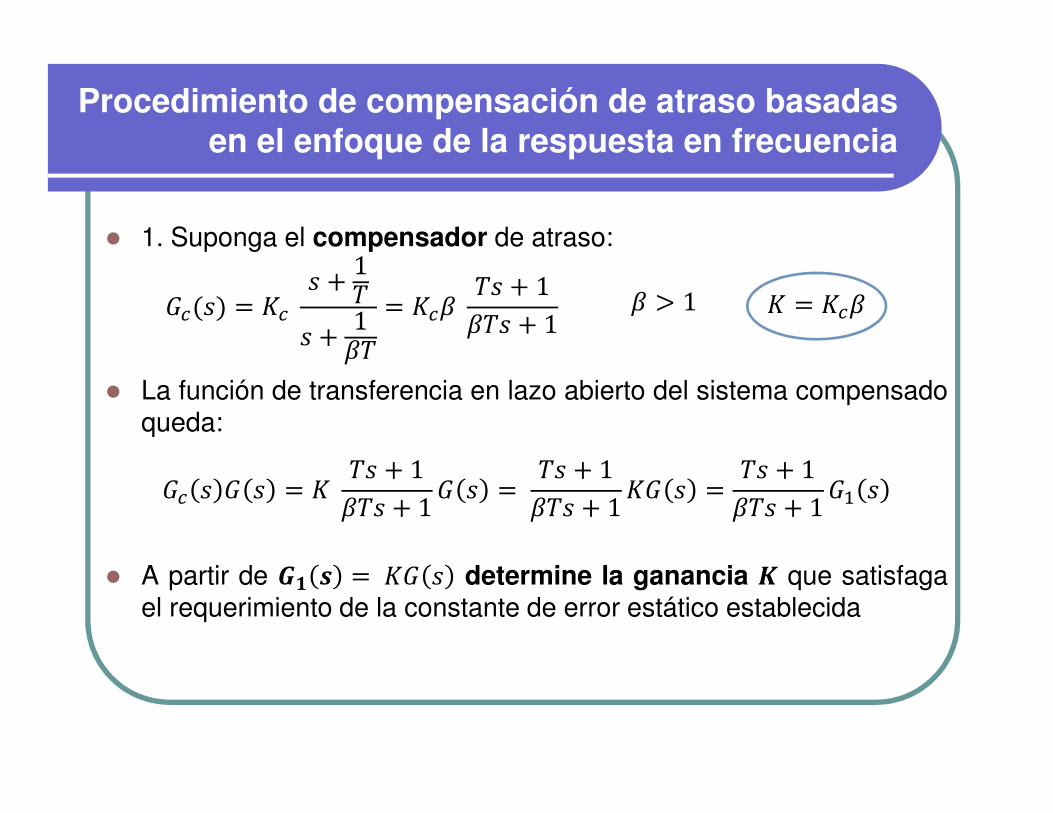
� 1. Suponga el compensador de atraso:
� La función de transferencia en lazo abierto del sistema compensadoqueda:
� A partir de �� � = � determine la ganancia � que satisfagael requerimiento de la constante de error estático establecida
�( ) = �� +
1�
+1
�
= �� � + 1
� + 1 > 1
� = � � + 1
� + 1 =
� + 1
� + 1� =
� + 1
� + 1�
� = ��

� 2. Si el sistema � = � no satisface las especificaciones,encuentre la frecuencia (nueva frecuencia de cruce de ganancia)en la cual el ángulo de fase sea el requerido (margen de faserequerido). A este margen de fase requerido se adiciona entre 5° y12° para compensar el desplazamiento del compensador
� 3. Para evitar los efectos nocivos del atraso de fase producido por elcompensador, el cero y el polo del compensador de atraso debenubicarse mucho más abajo que la nueva frecuencia de cruce deganancia.
� El cero del compensador de atraso se ubica entre una octava yuna década por debajo de la nueva frecuencia de cruce deganancia.

� 4. Determinar la atenuación necesaria para disminuir la curva demagnitud a 0 dB en la nueva frecuencia de cruce de ganancia.Considerando que ésta atenuación es de −�� � !", determineel valor de ".
� Obtener la otra frecuencia de esquina que corresponde al polodel compensador de atraso a partir de � =
�
#$.
� 5. Usando el valor de � determinado en el paso 1 y el de obtenido en el paso 4, calcule la constante �� a partir de
�� =�

Ejemplo 6.1
� Considere el sistema con la función de transferencia en lazo abierto:
� Se desea compensar el sistema a fin de que la constante de error estático de velocidad �% sea de 5 &'(�, y el margen de fase no sea menos 40° y el margen de ganancia no sea menor de 10 )*.
� Solución� La función de transferencia en lazo abierto del sistema:
=1
+ 1 (0.5 + 1)
=1
+ 1 (0.5 + 1)=
1
0.5 + + 1.5 , +
� La función de transferencia en lazo cerrado del sistema:
-( )
.( )=
1 + =
1 + 1 (0.5 + 1)
1 +1
+ 1 (0.5 + 1)
=1
0.5 + + 1.5 , + + 1
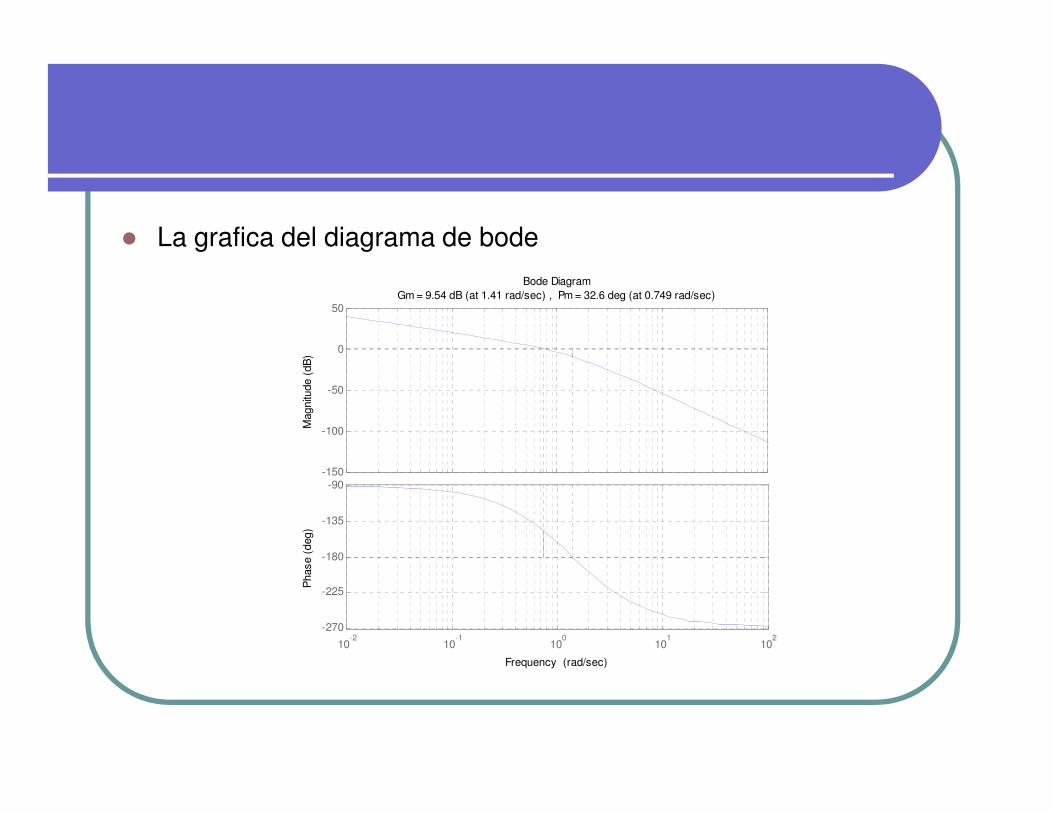
� La grafica del diagrama de bode
-150
-100
-50
0
50M
agnitu
de (
dB
)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Phase (
deg)
Bode Diagram
Gm = 9.54 dB (at 1.41 rad/sec) , Pm = 32.6 deg (at 0.749 rad/sec)
Frequency (rad/sec)
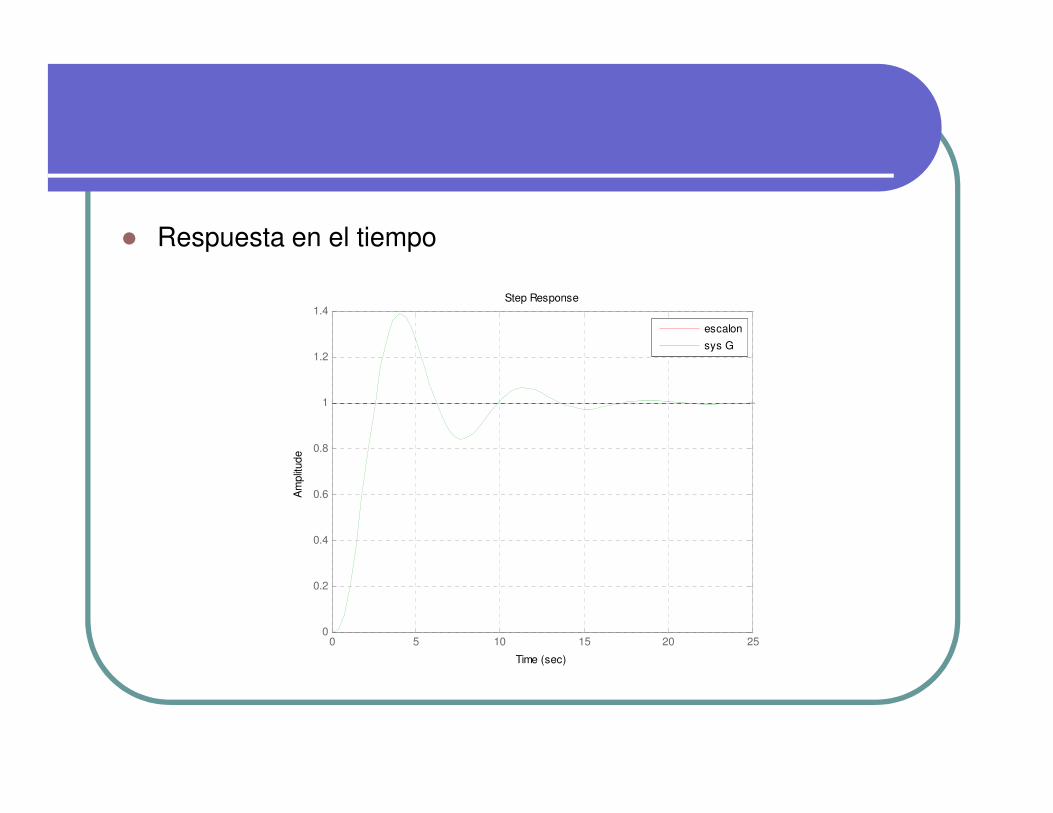
� Respuesta en el tiempo
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ude
escalon
sys G
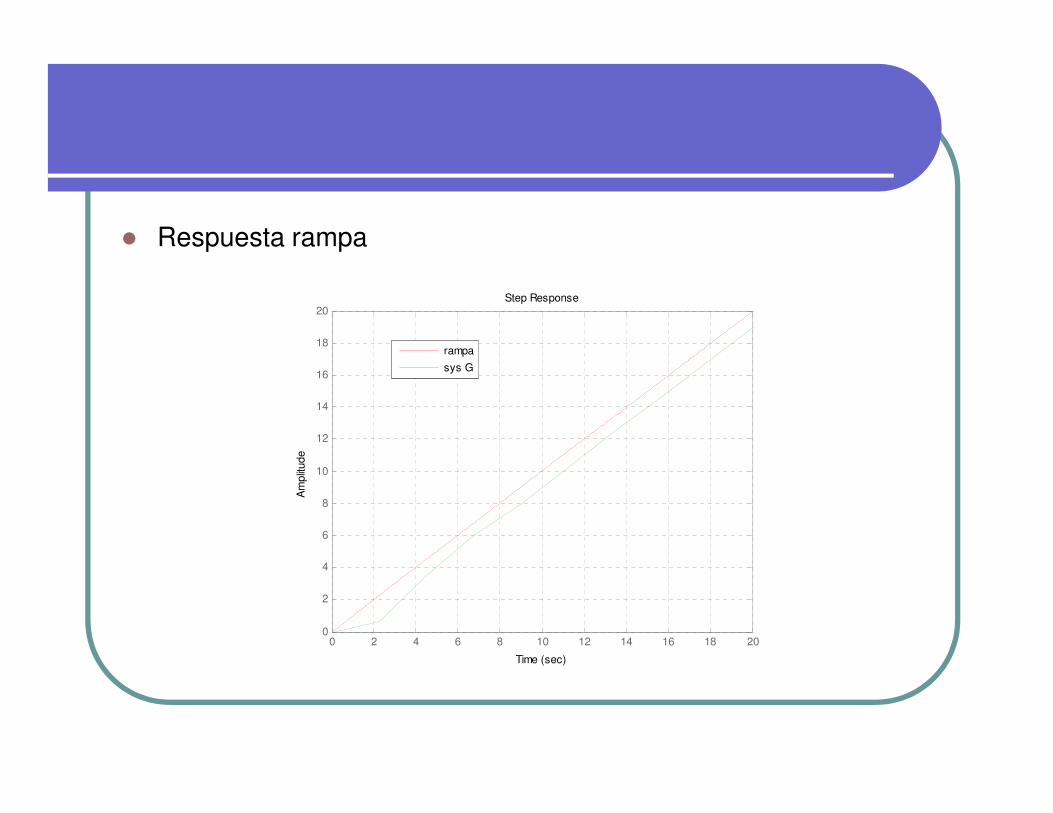
� Respuesta rampa
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20
Step Response
Time (sec)
Am
plit
ude
rampa
sys G

� Los parámetros del sistema:
� 1. La red de compensación que utilizaremos es de atraso, de la forma:
� Donde:
• /0 = 32.6°
• /3 = 9.54 )*• �% = 1
• /0 ≥ 40°
• /3 ≥ 10 )*
• �%� = 5
No compensado Compensado
� = �� +
1�
+1
�
= �� � + 1
� + 1= �
� + 1
� + 1 > 1
� = ��
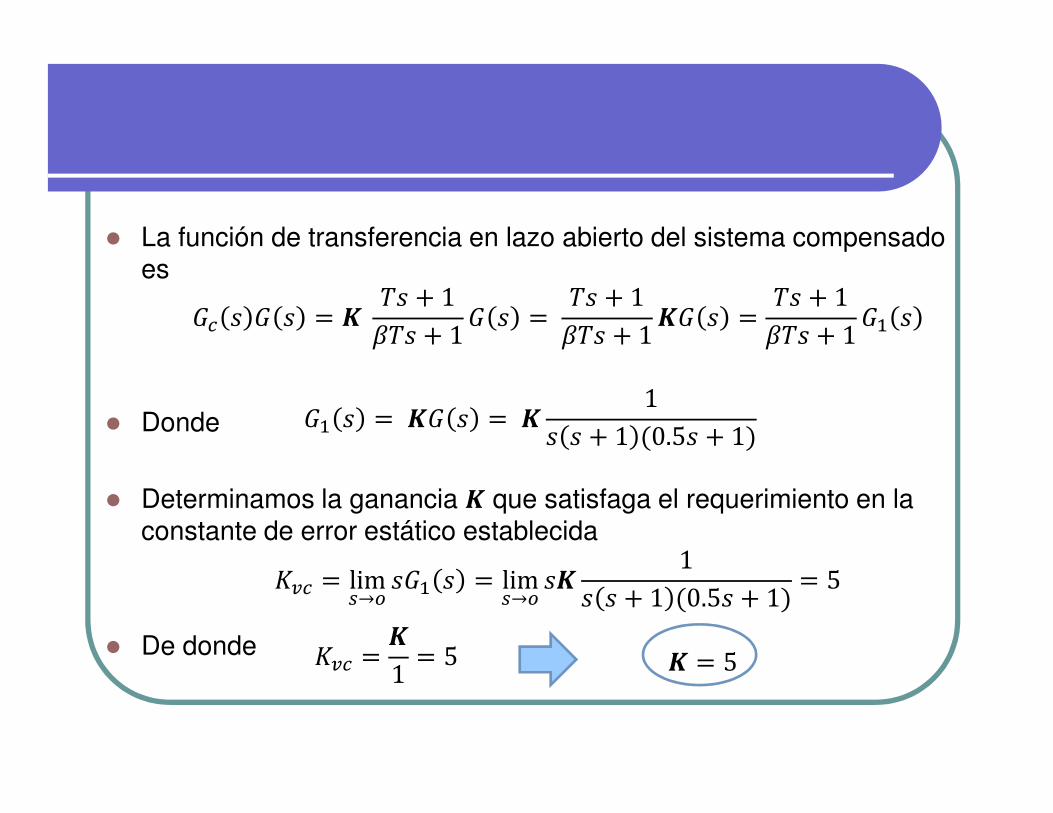
� La función de transferencia en lazo abierto del sistema compensado es
� Donde
� Determinamos la ganancia � que satisfaga el requerimiento en la constante de error estático establecida
� De donde
� = � � + 1
� + 1 =
� + 1
� + 1� =
� + 1
� + 1�
� = � = �1
+ 1 (0.5 + 1)
�%� = lim9→;
� = lim9→;
�1
+ 1 (0.5 + 1)= 5
�%� =�
1= 5 � = 5
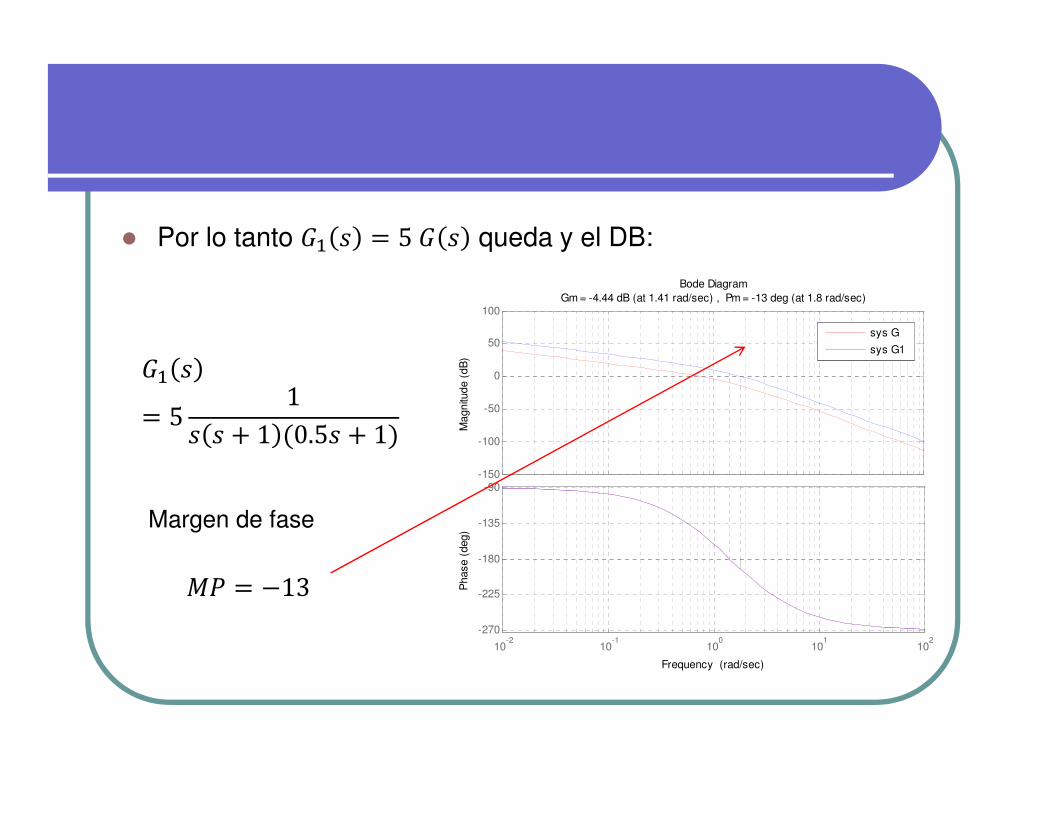
� Por lo tanto � = 5 queda y el DB:
�
= 51
+ 1 (0.5 + 1)
-150
-100
-50
0
50
100
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Phase (
deg)
Bode Diagram
Gm = -4.44 dB (at 1.41 rad/sec) , Pm = -13 deg (at 1.8 rad/sec)
Frequency (rad/sec)
sys G
sys G1
/0 = −13
Margen de fase
� 2. El margen de fase requerido es 40° , se debe adicionar entre 5
a 12° a fin de que el margen de fase especificado compense lamodificación de la curva de fase
� En el diagrama de Bode de � obtenemos la frecuenciacorrespondiente a un margen de fase de 52°, la cual se da a0.46 <=)/ &'.
� Esta es la nueva frecuencia de cruce de ganancia (del sistemacompensado)
? = 40 + 12 = 52°
�@ = 0.46 <=)/ &'
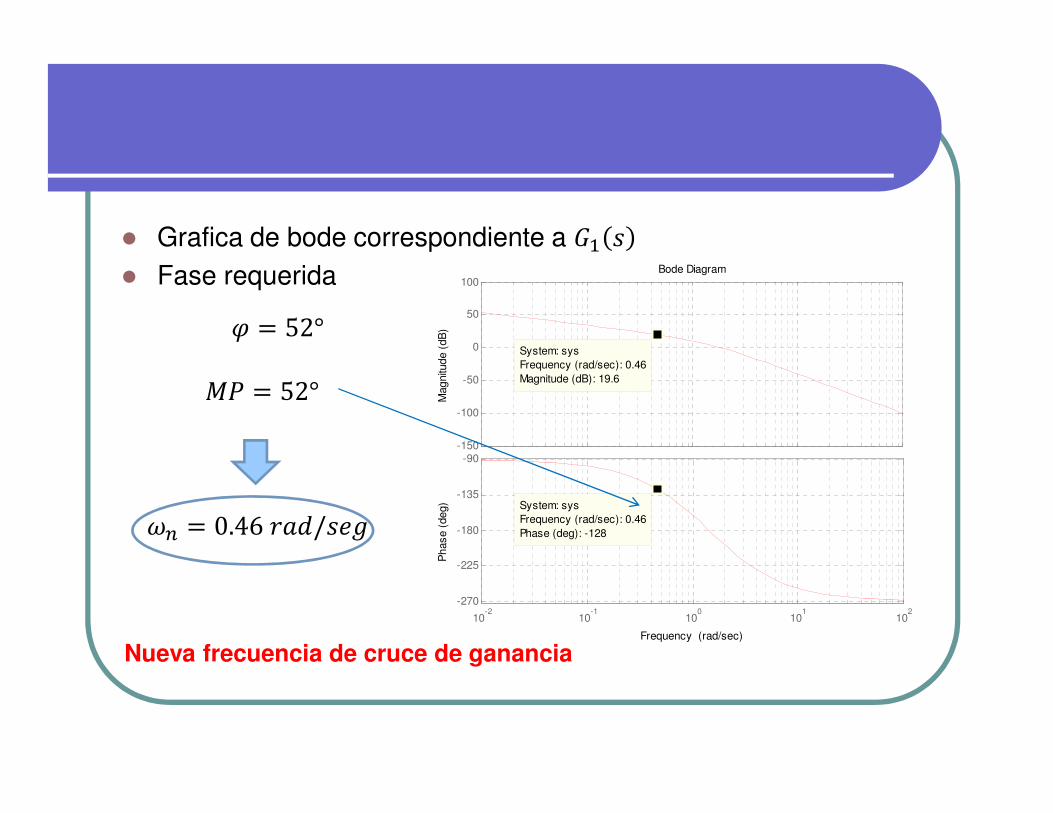
� Grafica de bode correspondiente a �
� Fase requerida Bode Diagram
Frequency (rad/sec)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
System: sys
Frequency (rad/sec): 0.46
Phase (deg): -128
Phase (
deg)
-150
-100
-50
0
50
100
System: sys
Frequency (rad/sec): 0.46
Magnitude (dB): 19.6
Magnitu
de (
dB
)
/0 = 52°
�@ = 0.46 <=)/ &'
Nueva frecuencia de cruce de ganancia
? = 52°

� 3. El cero y el polo del compensador de atraso deben ubicarsemucho más abajo que la nueva frecuencia de cruce de gananciaentre una octava o una década por debajo.
� La frecuencia de esquina del cero, elegimos a dos octavas debajode
� 4. Bajar la curva de magnitud �( ) hasta 0 dB en la nuevafrecuencia de cruce de ganancia (�@ = 0.46), el compensador deatraso debe proporcionar ésta atenuación.
� =1
�= 0.115 � = 8.70
�@ = 0.46 <=)/ &':
cero

Bode Diagram
Frequency (rad/sec)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
System: sys
Frequency (rad/sec): 0.46
Phase (deg): -128
Phase (
deg)
-150
-100
-50
0
50
100
System: sys
Frequency (rad/sec): 0.46
Magnitude (dB): 19.6
Magnitu
de (
dB
)
�@ = 0.46 <=)/ &'
Nueva frecuencia de cruce de ganancia
/' = 19.6 dB
−�� � !" = −19.6
= 9.54

� El valor del polo del compensador en atraso estará:
� La función de transferencia del compensador de atraso es:
� 5. Si � = ��, obtenemos el valor de C�, para � = 5
� =1
�=
1
9.54(8.70)=
1
82.1280= 0.0122 <=)/ &'
� = �� +
1�
+1
�
= �� +
18.70
+1
82.128
= �� + 0.115
+ 0.0122
�� =�
=
5
9.44= 0.53

� La función de transferencia del compensador es:
� = �� +
1�
+1
�
= 0.53 +
18.70
+1
82.1280
= 0.53 + 0.1149
+ 0.0122=
0.53 + 0.0609
+ 0.0122

� Grafica de Bode del compensador
-10
-5
0
5
10
15M
agnitu
de (
dB
)
10-4
10-3
10-2
10-1
100
101
-60
-30
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
sys C

� Diagramas de bode del sistema y compensador
-150
-100
-50
0
50
100
150
Magnitu
de (
dB
)
10-4
10-3
10-2
10-1
100
101
102
-270
-180
-90
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
sys G
sys C

� La función de transferencia de sistema compensado
� = �� +
1�
+1
�
1
+ 1 (0.5 + 1)
= 0.53 + 0.1149
+ 0.0122
1
+ 1 (0.5 + 1)
=0.53 + 0.0609
0.5 D + 1.5061 + + 1.0183 , + 0.0122

� diagramas de bode de los sistema , � y �
-150
-100
-50
0
50
100
150
Magnitu
de (
dB
)
10-4
10-3
10-2
10-1
100
101
102
-270
-180
-90
0
Phase (
deg)
Bode Diagram
Gm = 13.6 dB (at 1.3 rad/sec) , Pm = 39 deg (at 0.478 rad/sec)
Frequency (rad/sec)
sys G
sys C
sys CG

� Funciones de transferencia del sistema no compensado
� Funciones de transferencia del sistema compensado
=1
0.5 + + 1.5 , +
-( )
.( )=
1
0.5 + + 1.5 , + + 1
� =0.53 + 0.0609
0.5 D + 1.5061 + + 1.0183 , + 0.0122
-( )
.( )=
�
1 + �
=0.53 + 0.0609
0.5 D + 1.5061 + + 1.0183 , + 0.5422 + 0.0609

� Respuesta escalón
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ude
sys G
sys CG
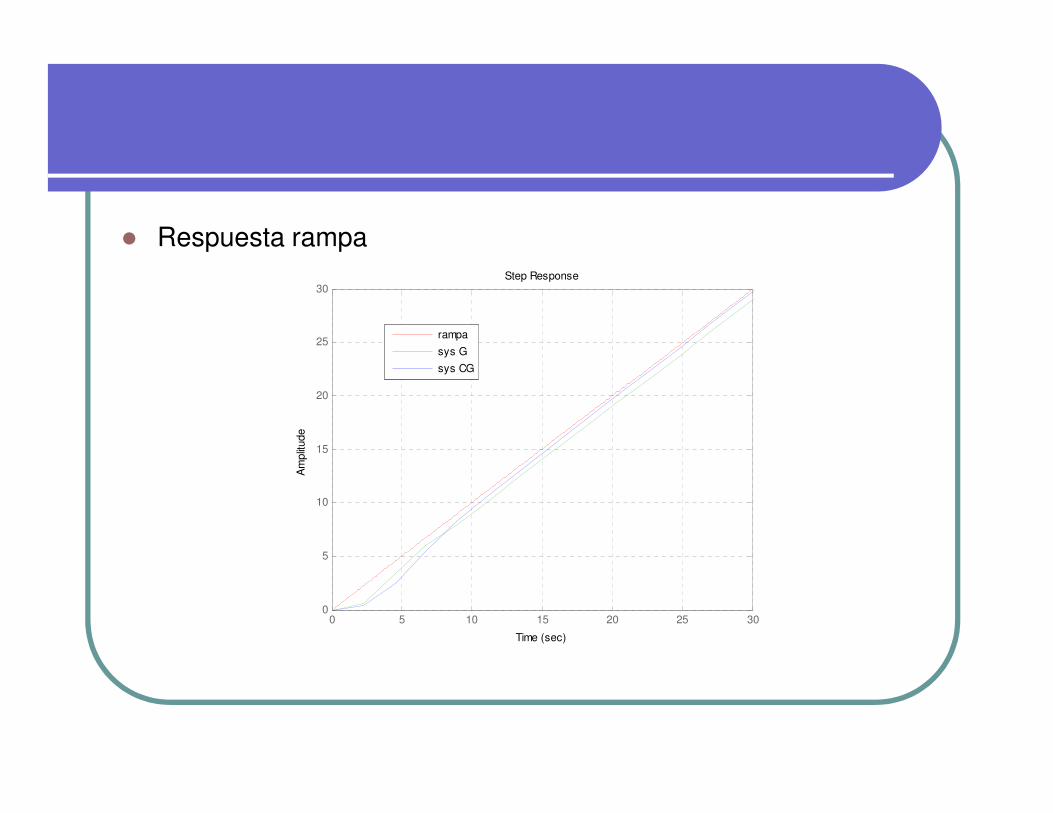
� Respuesta rampa
0 5 10 15 20 25 300
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
rampa
sys G
sys CG
Ejemplo 6.2
� Diseñe un compensador tal que la constante de error estático develocidad sea de 4 &'(�, el margen de fase sea de 50° y el margende ganancia sea de 10 )* o más.
� Solución� La función de transferencia en lazo abierto del sistema
� La función de transferencia en lazo cerrado del sistema:
=1
, + 1
=1
, + 1
-( )
.( )=
1 + =
1 , + 1
1 +1
, + 1
=1
, + 2
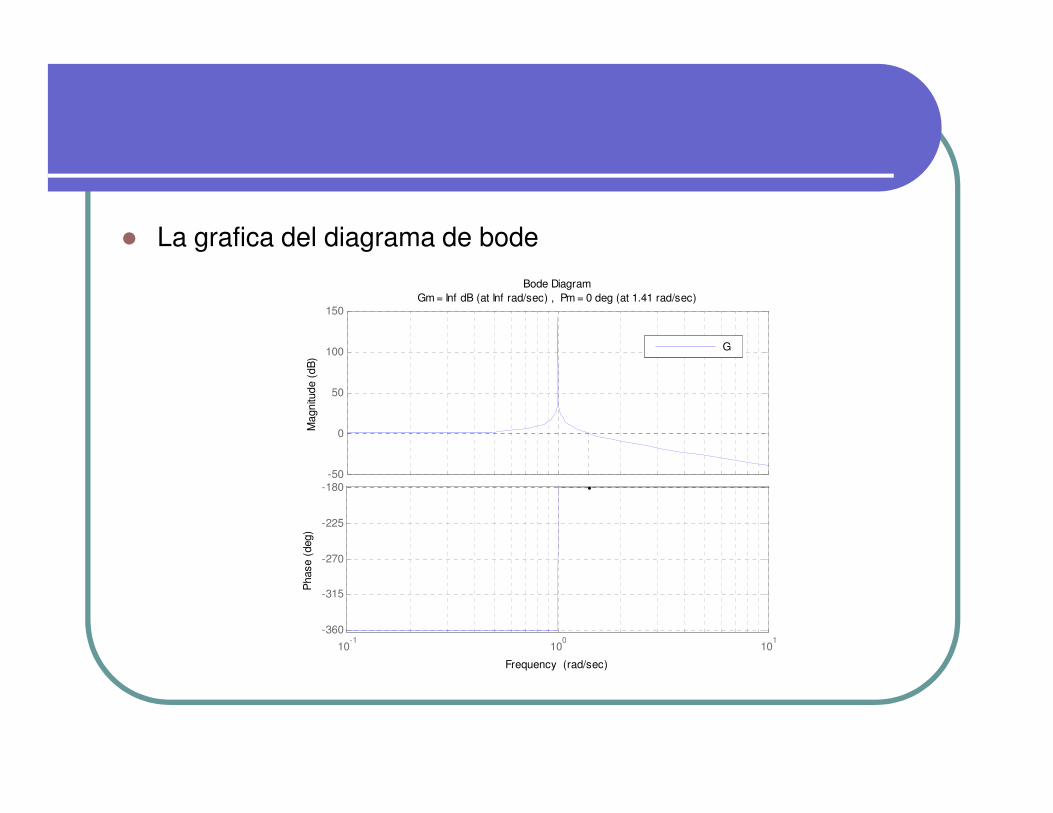
� La grafica del diagrama de bode
-50
0
50
100
150M
agnitu
de (
dB
)
10-1
100
101
-360
-315
-270
-225
-180
Phase (
deg)
Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 0 deg (at 1.41 rad/sec)
Frequency (rad/sec)
G

� Respuesta en el tiempo
0 50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
Time (sec)
Am
plit
ude
escalon
sys G

� Respuesta rampa
0 5 10 15 20 25 300
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
rampa
sys G
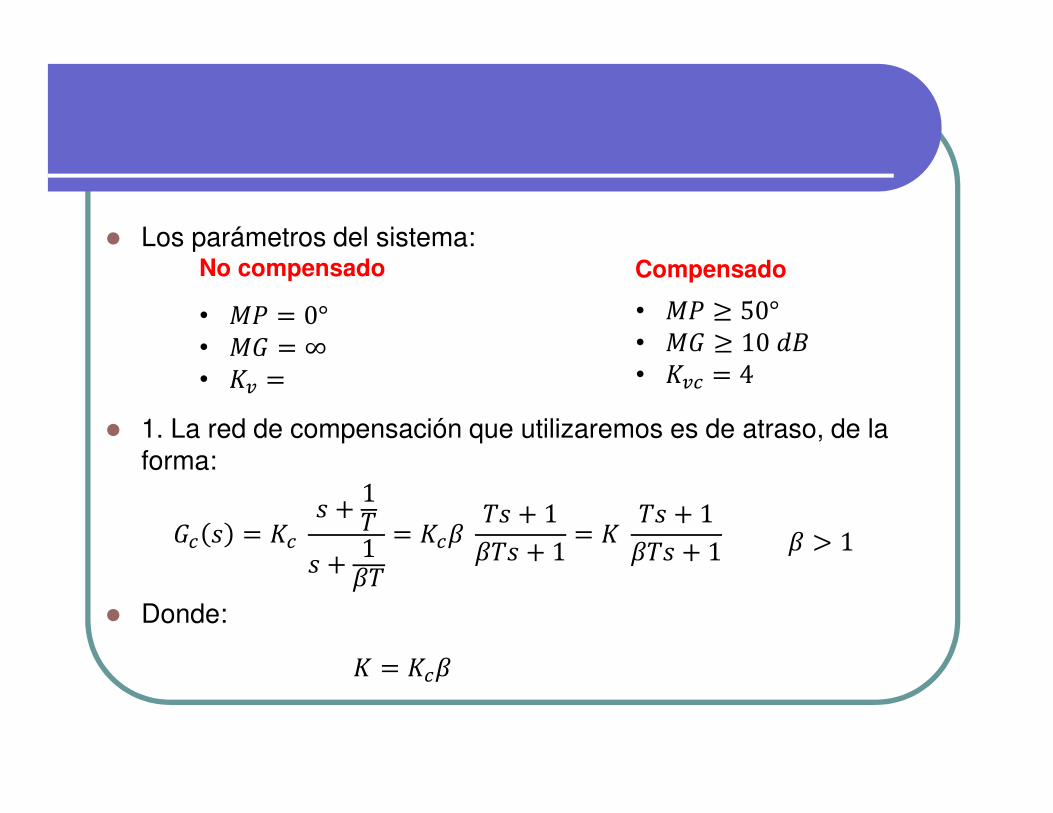
� Los parámetros del sistema:
� 1. La red de compensación que utilizaremos es de atraso, de la forma:
� Donde:
• /0 = 0°
• / = ∞
• �% =
• /0 ≥ 50°
• / ≥ 10 )*
• �%� = 4
No compensado Compensado
� = �� +
1�
+1
�
= �� � + 1
� + 1= �
� + 1
� + 1 > 1
� = ��

� La función de transferencia en lazo abierto del sistema compensado es
� Donde
� Determinamos la ganancia � que satisfaga el requerimiento en laconstante de error estático establecida
� Dado que es un sistema de tipo cero, añadimos un integrador
� = � � + 1
� + 1 =
� + 1
� + 1� =
� + 1
� + 1�
� = � = �1
, + 1
�%� = lim9→;
� = lim9→;
�1
, + 1= 4
� En el compensador ponemos un integrador, de tal forma
� Donde
� La función de transferencia en lazo abierto del sistema compensado
� =�
F( )
lim9→G
F( ) = 1
�� � =�
��F � =
�
��F �
1
, + 1
� = F �
1
, + 1= F �( ) � =
�
1
, + 1

� Determinamos la ganancia � que satisfaga el requerimiento en laconstante de error estático establecida. �% = 4
� La función de transferencia � , con el valor de � hallado
�%� = lim9→;
� = lim9→;
�
F
1
, + 1= � = 4
� = �
=
4
1
, + 1=
4
( , + 1)

-50
0
50
100
150
200
Magnitu
de (
dB
)
10-1
100
101
-450
-360
-270
-180
-90
Phase (
deg)
Bode Diagram
Gm = -212 dB (at 1 rad/sec) , Pm = -90 deg (at 1.8 rad/sec)
Frequency (rad/sec)
sys G
sys C1
sys C1G
� El diagrama de bode para esta �
/0 = −90
Margen de fase
� = �
=4
1
, + 1=
4
+ +
�H = 1.8

� 2. El margen de fase requerido es 50° , se debe adicionar entre 5 a12° a fin de que el margen de fase especificado compense lamodificación de la curva de fase
� En el diagrama de Bode de � debemos obtener la frecuenciacorrespondiente a un margen de fase de I�°, la cual no se puededeterminar.
� Asumimos parte del compensador F = (= + 1), el cual cumplecon el coeficiente de error estático de velocidad y tiene una fase de90 una década arriba de la frecuencia de corte.
? = 50 + 10 = 60°
= =1
�=
1
0.18= 5.56� =
1.8
10= 0.18
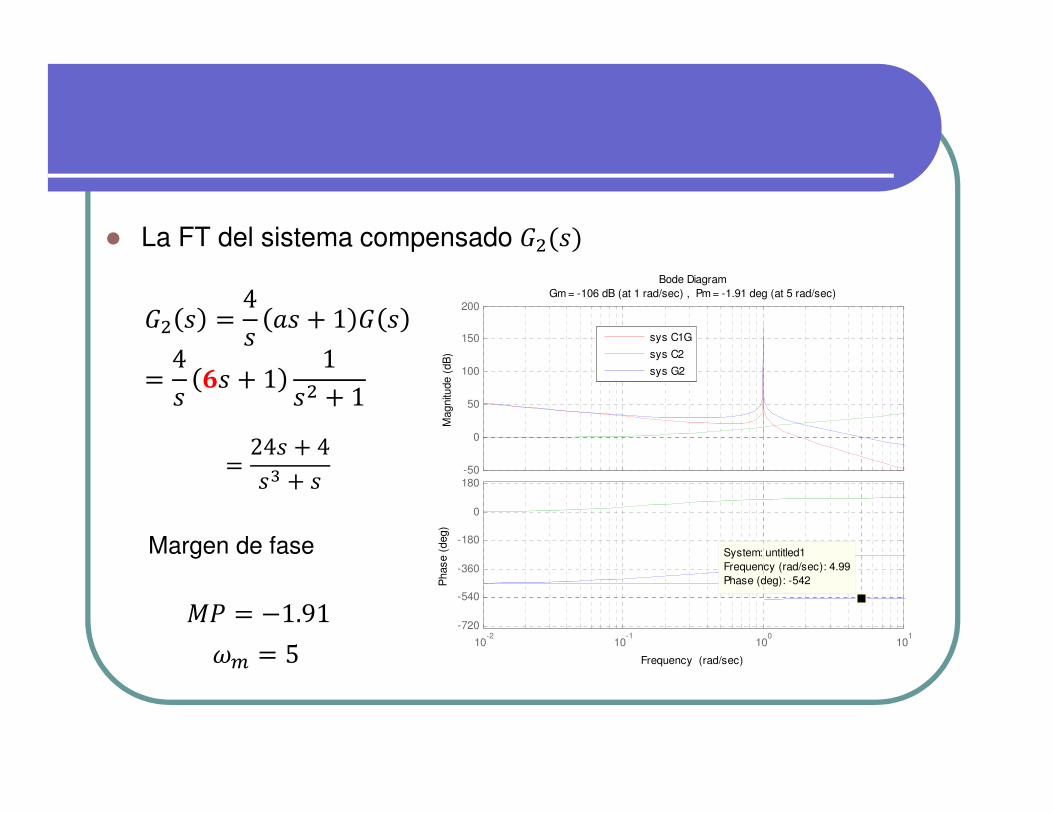
� La FT del sistema compensado ,( )
, =4
= + 1
=4
I + 1
1
, + 1
=24 + 4
+ +
/0 = −1.91
Margen de fase
�H = 5
Bode Diagram
Gm = -106 dB (at 1 rad/sec) , Pm = -1.91 deg (at 5 rad/sec)
Frequency (rad/sec)
-50
0
50
100
150
200
Magnitu
de (
dB
)
10-2
10-1
100
101
-720
-540
-360
-180
0
180
System: untitled1
Frequency (rad/sec): 4.99
Phase (deg): -542
Phase (
deg)
sys C1G
sys C2
sys G2

� El margen de fase es /0 = −1.91 a la frecuencia de 5
� Del análisis del grafico de Bode determinamos que se necesita una fase de 50 + 1.91 = 51.91°
� Aumentamos otro factor de primer orden (J + 1), cuya frecuencia de corte es:
� El sistema compensado queda de la forma:
J =1
�=
1
5= 0.2
+ =� = + 1 J + 1
=4 6 + 1 0.2 + 1
1
, + 1=
4.8 , + 24.8 + 4
+ +
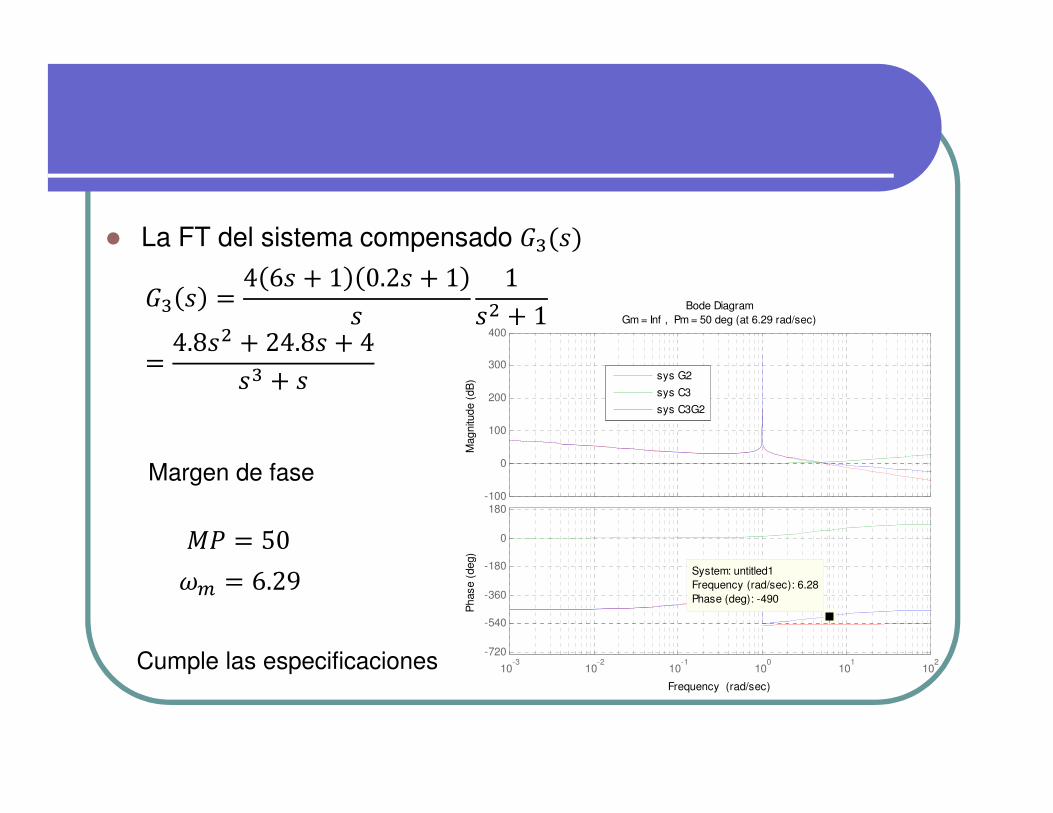
� La FT del sistema compensado +( )
/0 = 50
Margen de fase
�H = 6.29
+ =4 6 + 1 0.2 + 1
1
, + 1
=4.8 , + 24.8 + 4
+ +
-100
0
100
200
300
400
Magnitu
de (
dB
)
Bode Diagram
Gm = Inf , Pm = 50 deg (at 6.29 rad/sec)
Frequency (rad/sec)
10-3
10-2
10-1
100
101
102
-720
-540
-360
-180
0
180
System: untitled1
Frequency (rad/sec): 6.28
Phase (deg): -490
Phase (
deg)
sys G2
sys C3
sys C3G2
Cumple las especificaciones

� La función de transferencia del sistema compensado
� Funciones de transferencia lazo cerrado del sistema compensado
-( )
.( )=
�
1 + � =
4.8 , + 24.8 + 4
+ + 4.8 , + 25.8 + 4
� =4 6 + 1 0.2 + 1
1
, + 1

� Respuesta escalón
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Step Response
Time (sec)
Am
plit
ude
escalon
sys G
sys CG

� Respuesta rampa
0 5 10 15 20 25 300
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
rampa
sys G
sys CG

Ejemplo 6.3
� …