capítulo 3. -...
TRANSCRIPT
Capítulo 3. Sistemas de ecuaciones, matrices y
determinantes.
134
“Mientras que la física y las matemáticas pueden decirnos como empezó el universo, no son de mucha utilidad en la predicción de la conducta humana, porque hay demasiadas ecuaciones que resolver”
Stephen Howking
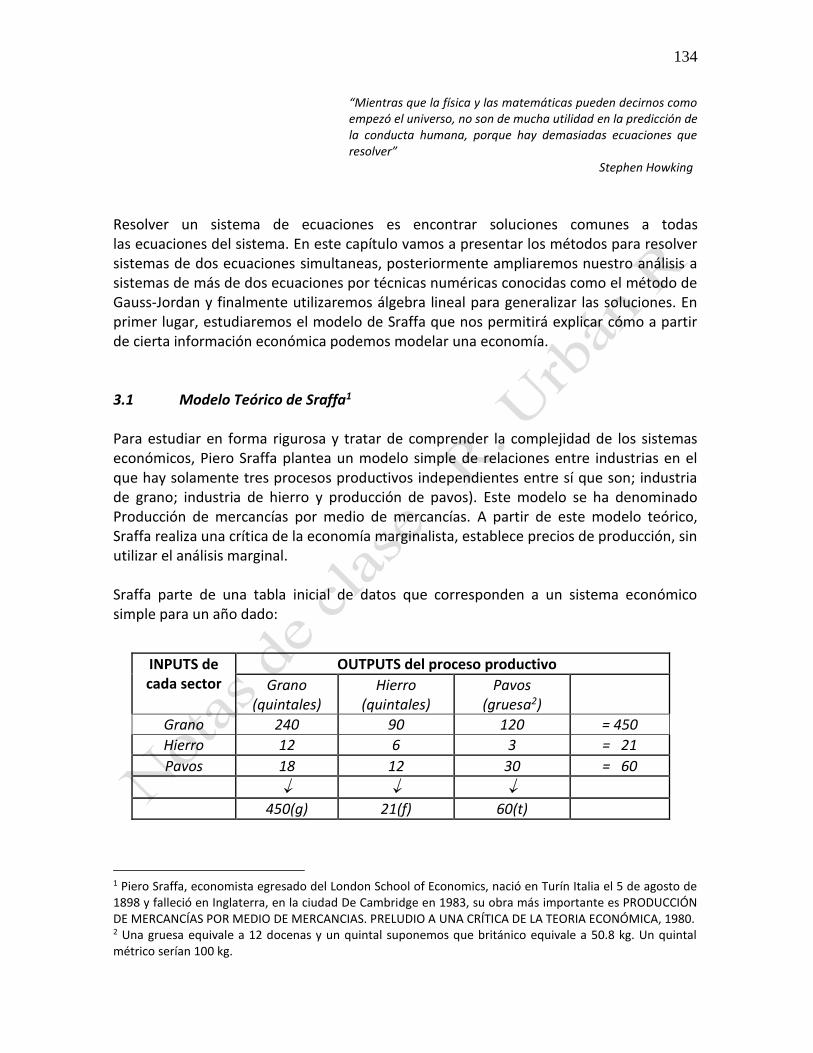
Resolver un sistema de ecuaciones es encontrar soluciones comunes a todas las ecuaciones del sistema. En este capítulo vamos a presentar los métodos para resolver sistemas de dos ecuaciones simultaneas, posteriormente ampliaremos nuestro análisis a sistemas de más de dos ecuaciones por técnicas numéricas conocidas como el método de Gauss-Jordan y finalmente utilizaremos álgebra lineal para generalizar las soluciones. En primer lugar, estudiaremos el modelo de Sraffa que nos permitirá explicar cómo a partir de cierta información económica podemos modelar una economía. 3.1 Modelo Teórico de Sraffa1 Para estudiar en forma rigurosa y tratar de comprender la complejidad de los sistemas económicos, Piero Sraffa plantea un modelo simple de relaciones entre industrias en el que hay solamente tres procesos productivos independientes entre sí que son; industria de grano; industria de hierro y producción de pavos). Este modelo se ha denominado Producción de mercancías por medio de mercancías. A partir de este modelo teórico, Sraffa realiza una crítica de la economía marginalista, establece precios de producción, sin utilizar el análisis marginal. Sraffa parte de una tabla inicial de datos que corresponden a un sistema económico simple para un año dado:
INPUTS de cada sector
OUTPUTS del proceso productivo
Grano (quintales)
Hierro (quintales)
Pavos (gruesa2)
Grano 240 90 120 = 450
Hierro 12 6 3 = 21
Pavos 18 12 30 = 60
450(g) 21(f) 60(t)
1 Piero Sraffa, economista egresado del London School of Economics, nació en Turín Italia el 5 de agosto de 1898 y falleció en Inglaterra, en la ciudad De Cambridge en 1983, su obra más importante es PRODUCCIÓN DE MERCANCÍAS POR MEDIO DE MERCANCIAS. PRELUDIO A UNA CRÍTICA DE LA TEORIA ECONÓMICA, 1980. 2 Una gruesa equivale a 12 docenas y un quintal suponemos que británico equivale a 50.8 kg. Un quintal métrico serían 100 kg.
135
Cada columna, como lo hemos establecido con anterioridad, relaciona las cantidades físicas de grano, hierro y pavos que son introducidas en cada industria. Cada columna son entonces los inputs de cada proceso productivo. Además, las mercancías están expresadas en unidades diferentes; por esta razón las columnas no se pueden sumar, lo contrario de las filas. Este arreglo matricial representa los flujos en el sistema económico durante un período. No especifica la utilización de estas mercancías. Es claro que una parte de estas mercancías será destina al consumo y otra a la producción. Esto obliga a modificar la tabla de relaciones anterior. Para realizar este ajuste tendremos que suponer que; 1) el sistema económico es estacionario, 2) el empleo, desarrollo tecnológico y el consumo son constantes; 3) el sistema económico es estacionario. Adicionalmente, añadimos el dato de que en el sistema emplea 60 obreros en la siguiente distribución por industria.
Grano Hierro Pavos
Sector final (mano de obra) 18 12 30 60
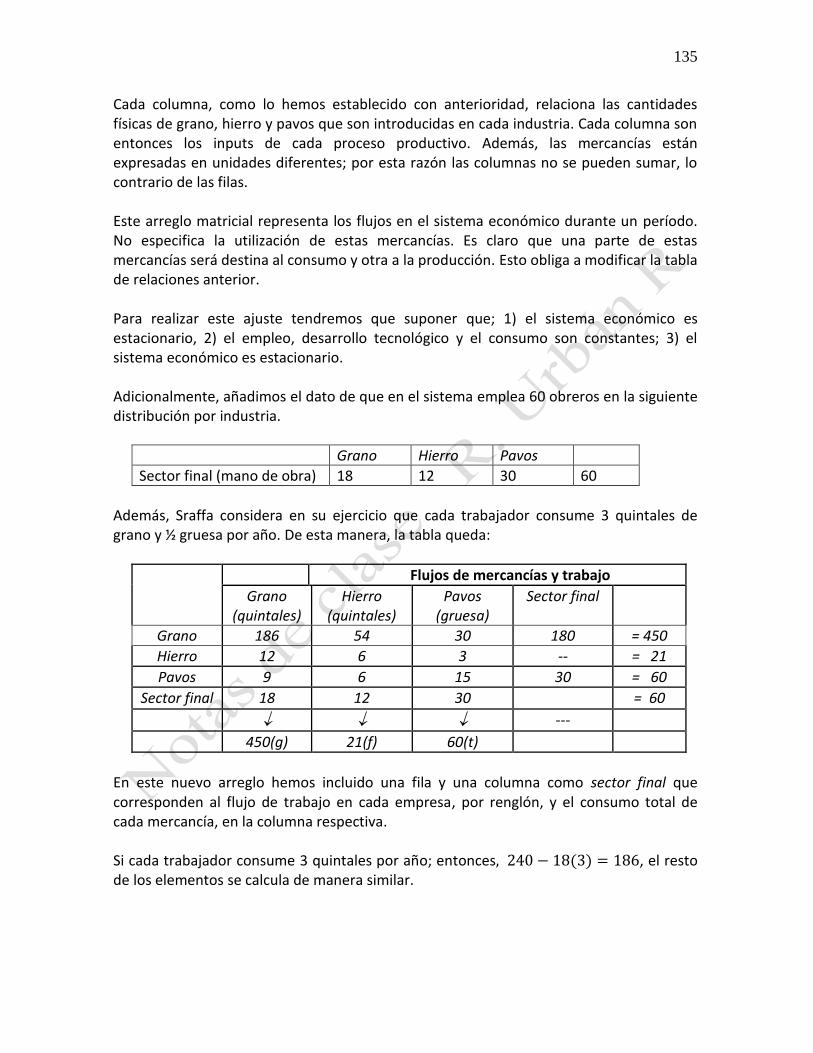
Además, Sraffa considera en su ejercicio que cada trabajador consume 3 quintales de grano y ½ gruesa por año. De esta manera, la tabla queda:
Flujos de mercancías y trabajo
Grano (quintales)
Hierro (quintales)
Pavos (gruesa)
Sector final
Grano 186 54 30 180 = 450
Hierro 12 6 3 -- = 21
Pavos 9 6 15 30 = 60
Sector final 18 12 30 = 60
---
450(g) 21(f) 60(t)
En este nuevo arreglo hemos incluido una fila y una columna como sector final que corresponden al flujo de trabajo en cada empresa, por renglón, y el consumo total de cada mercancía, en la columna respectiva. Si cada trabajador consume 3 quintales por año; entonces, 240 − 18(3) = 186, el resto de los elementos se calcula de manera similar.
136
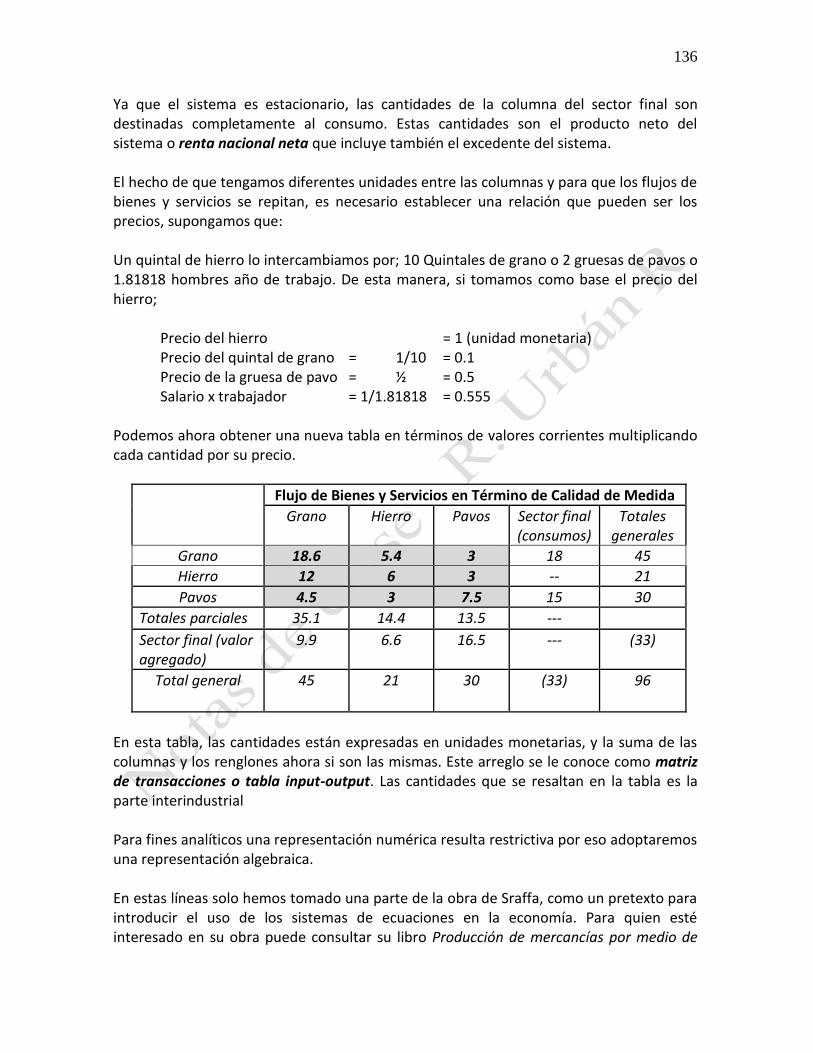
Ya que el sistema es estacionario, las cantidades de la columna del sector final son destinadas completamente al consumo. Estas cantidades son el producto neto del sistema o renta nacional neta que incluye también el excedente del sistema. El hecho de que tengamos diferentes unidades entre las columnas y para que los flujos de bienes y servicios se repitan, es necesario establecer una relación que pueden ser los precios, supongamos que: Un quintal de hierro lo intercambiamos por; 10 Quintales de grano o 2 gruesas de pavos o 1.81818 hombres año de trabajo. De esta manera, si tomamos como base el precio del hierro;
Precio del hierro = 1 (unidad monetaria) Precio del quintal de grano = 1/10 = 0.1 Precio de la gruesa de pavo = ½ = 0.5 Salario x trabajador = 1/1.81818 = 0.555
Podemos ahora obtener una nueva tabla en términos de valores corrientes multiplicando cada cantidad por su precio.
Flujo de Bienes y Servicios en Término de Calidad de Medida
Grano
Hierro Pavos Sector final (consumos)
Totales generales
Grano 18.6 5.4 3 18 45
Hierro 12 6 3 -- 21
Pavos 4.5 3 7.5 15 30
Totales parciales 35.1 14.4 13.5 ---
Sector final (valor agregado)
9.9 6.6 16.5 --- (33)
Total general 45 21 30 (33) 96
En esta tabla, las cantidades están expresadas en unidades monetarias, y la suma de las columnas y los renglones ahora si son las mismas. Este arreglo se le conoce como matriz de transacciones o tabla input-output. Las cantidades que se resaltan en la tabla es la parte interindustrial Para fines analíticos una representación numérica resulta restrictiva por eso adoptaremos una representación algebraica. En estas líneas solo hemos tomado una parte de la obra de Sraffa, como un pretexto para introducir el uso de los sistemas de ecuaciones en la economía. Para quien esté interesado en su obra puede consultar su libro Producción de mercancías por medio de
137
mercancías, antes citado. Algunos autores, mayoritariamente no marxistas, señalan que el uso matemático es escaso o que con la formulación de ecuaciones de Sraffa es imposible modelar una economía medianamente compleja, para otros lo consideran como uno de los economistas más destacados de todos los tiempos. No es motivo de este libro entrar en discusión con estos puntos de vista los respetamos e invitamos a los lectores a conocer la obra de Sraffa.
3.2 Sistemas de ecuaciones
Una recta se representa algebraicamente mediante una ecuación como la siguiente:
𝑦 = 𝑎𝑥 + 𝑏
Esta es una ecuación lineal porque las variables 𝑥, 𝑦 porque no comprende productos o raíces de variables y estas variables están elevadas a la primera potencia, 𝑎, 𝑏 son constantes. De la misma manera, un sistema de m ecuaciones lineal con n incógnitas, o sistema lineal es un conjunto formado por más de una ecuación que se pueden escribir de la forma:
𝑎11𝑥1 + 𝑎12𝑥2 + 𝑎13𝑥3 + ……+ 𝑎1𝑛𝑥𝑛 = 𝑏1 𝑎21𝑥1 + 𝑎22𝑥2 + 𝑎23𝑥3 + ……+ 𝑎2𝑛𝑥𝑛 = 𝑏2 𝑎31𝑥1 + 𝑎32𝑥2 + 𝑎33𝑥3 + ……+ 𝑎3𝑛𝑥𝑛 = 𝑏3
𝑎𝑚1𝑥1 + 𝑎𝑚2𝑥2 + 𝑎𝑚3𝑥3 + ……+ 𝑎𝑚𝑛𝑥𝑛 = 𝑏𝑚
Donde 𝑥1, 𝑥2, 𝑥3, ……𝑥𝑛 son las variables del sistema; los términos 𝑎𝑖,𝑗 son los datos o
los coeficientes del sistema y las 𝑏𝑖 son las constantes. Una manera de caracterizar un sistema de ecuaciones es por medio de sus dimensiones. Un sistema como el anterior, cuando el número de ecuaciones es igual al número de incógnitas, decimos que es un sistema rectangular de orden 𝑚 𝑥 𝑛. Por ejemplo, para los siguientes sistemas de ecuaciones.
3𝑥 − 2𝑦 = 6 −15𝑥 + 10𝑦 = −30
2𝑥 − 7𝑦 = 0
3𝑥2 + 2𝑦 = 6 𝑥 + 𝑦2 = 3
𝑥 + 𝑦2 = 𝑒𝑧 8𝑥2 + 𝑦2 + 𝑧 = 3
Orden 3𝑥2 Sistema lineal
Orden 2𝑥2 Sistema no lineal
Orden 2𝑥3 Sistema no lineal
En lo que sigue, vamos a resolver sistemas de ecuaciones lineales de mas de dos variables. El método presentamos es una generalización del método de eliminación expuesto en el capítulo 2, y es aplicable a sistemas lineales de cualquier tamaño.

138
3.3 Método de Gauss
El método de Gauss reduce el esfuerzo de la búsqueda de soluciones de un sistema de ecuaciones lineales, mediante la eliminación de la necesidad de escribir explícitamente las variables en cada paso. Consiste en convertir el sistema de 𝑚 ecuaciones con 𝑛 incógnitas en uno escalonado, en el que la 1ª ecuación tiene 𝑛 incógnitas, la 2ª tiene (𝑛 − 1) incógnitas y así sucesivamente hasta la última ecuación que tiene solamente una incógnita. De esta manera, la última ecuación nos da el valor de la última incógnita. Después, sustituimos los resultados de las variables hacia arriba para encontrar el resto de los valores. Se inicia con el sistema original de ecuaciones, y lo transforma mediante operaciones de renglón en un sistema equivalente. Supongamos un sistema de tres ecuaciones con tres variables (𝑥1, 𝑥2, 𝑥3)
𝑎1,1𝑥1 + 𝑎1,2𝑥2 + 𝑎1,3𝑥3 = 𝑏₁
𝑎2,1𝑥1 + 𝑎2,2𝑥2 + 𝑎2,3𝑥3 = 𝑏2
𝑎3,1𝑥1 + 𝑎3,2𝑥2 + 𝑎3,3𝑥3 = 𝑏3
} Sistema original
Mediante operaciones entre renglones vamos a transformar el sistema original en un sistema escalonado, que tenga ceros debajo de la diagonal principal. Este proceso lo vamos a ilustrar con el siguiente ejemplo, 5𝑥 − 2𝑦 + 4𝑧 = −7 (𝑅1, Renglón 1) 3𝑥 + 4𝑦 − 6𝑧 = 5 (𝑅2, Renglón 2) 2𝑥 + 3𝑦 − 7𝑧 = −1 (𝑅3, Renglón 3) Una buena práctica para facilitar los cálculos es poner en el renglón superior la ecuación más simple, modificar el orden de las ecuaciones no altera el resultado. Después, iniciamos el proceso iterativo, Primero, mediante operaciones elementales hacemos cero los elementos que están debajo de la primera variable de la primera ecuación, en nuestro ejemplo la 𝑥. 2𝑥 + 3𝑦 − 7𝑧 = −1 R1
2𝑥 + 3𝑦 − 7𝑧 = −1 𝑅1 3𝑥 + 4𝑦 − 6𝑧 = 5 R2 𝑦 − 9𝑧 = −13 R2a=3 R1-2 R2 5𝑥 − 2𝑦 + 4𝑧 = −7 R3 19𝑦 − 43𝑧 = 9 R3a= 5 R1-2 R3
Una vez que hemos anulado los términos en 𝑥 debemos dejar fija la 1ª y 2ª ecuación y anular el término de 𝑦 en la 3ª ecuación 2𝑥 + 3𝑦 − 7𝑧 = −1 R1 𝑦 − 9𝑧 = −13 R2a −128𝑧 = −256 R3b= 19 R2a - R3a

139
De la última ecuación obtenemos despejamos el valor de 𝑧 =−256
−128= 2, sustituimos en el
renglón R2a y obtenemos 𝑦 − 9(2) = −13 que al despejar nos da 𝑦 = 5. Finalmente sustituimos estos valores en R1, 2𝑥 + 3(5) − 7(2) = −1. Así, 𝑥 = −1 y la solución de este sistema de ecuaciones es (−1,5,2).
En resumen, las operaciones básicas de renglón que hemos efectuado son,
1. Ambos lados de una ecuación pueden multiplicarse por una constante no cero. 2. Los múltiplos, no cero, de una ecuación, pueden sumarse a otra. 3. Las ecuaciones son intercambiables.
Cuando un sistema de ecuaciones tiene al menos una solución se dice que es consistente. Por lo contrario, si no tiene solución se llama sistema inconsistente.
El método de eliminación de Gauss se realiza normalmente utilizando un arreglo matricial. De esta manera, se reduce el esfuerzo en la búsqueda de soluciones ya que no tendremos que escribir explícitamente las variables en cada paso. De esta manera, el proceso para resolver un sistema de ecuaciones cualquiera de 𝑚 ecuaciones lineales y 𝑛 incógnitas por el método de Gauss es el siguiente. Dado un sistema cualquiera,
𝑎11𝑥1 + 𝑎12𝑥2 + 𝑎13𝑥3 + ⋯ . .+ 𝑎1𝑛𝑥𝑛 = 𝑏1 𝑎21𝑥1 + 𝑎22𝑥2 + 𝑎23𝑥3 + ⋯ . .+ 𝑎2𝑛𝑥𝑛 = 𝑏2
…… ……
𝑎𝑚1𝑥1 + 𝑎𝑚2𝑥2 + 𝑎𝑚3𝑥3 + ⋯ . .+ 𝑎𝑚𝑛𝑥𝑛 = 𝑏𝑚
El primer paso es escribir los coeficientes de las incógnitas como un arreglo matricial de la siguiente forma:
[ 𝑎11 𝑎12 𝑎13 ………… 𝑎1𝑛
𝑎21 𝑎22 𝑎23 ………… 𝑎2𝑛
… . . . . … ………… …… . … … ……… . . …𝑎𝑚1 𝑎𝑚2 𝑎𝑚3 ………… 𝑎𝑚𝑛]
Esta representación se llama matriz de coeficientes del sistema. Si le incluimos los valores de las constantes que aparecen en los laterales de la derecha de las ecuaciones como una columna adicional tendremos;
[ 𝑎11 𝑎12 𝑎13 ………… 𝑎1𝑛 𝑏1
𝑎21 𝑎22 𝑎23 ………… 𝑎2𝑛 𝑏2
… . . . . … ………… … …… . … … ……… . . … …𝑎𝑚1 𝑎𝑚2 𝑎𝑚3 ………… 𝑎𝑚𝑛 𝑏𝑚]
140
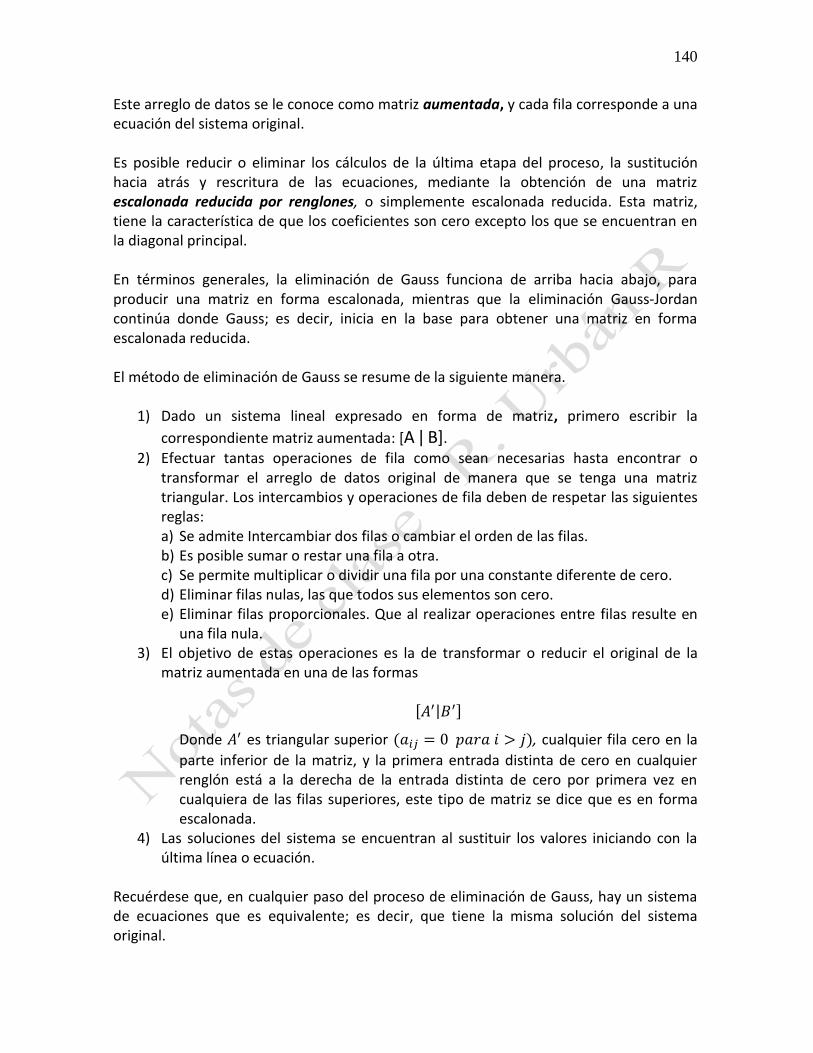
Este arreglo de datos se le conoce como matriz aumentada, y cada fila corresponde a una ecuación del sistema original. Es posible reducir o eliminar los cálculos de la última etapa del proceso, la sustitución hacia atrás y rescritura de las ecuaciones, mediante la obtención de una matriz escalonada reducida por renglones, o simplemente escalonada reducida. Esta matriz, tiene la característica de que los coeficientes son cero excepto los que se encuentran en la diagonal principal. En términos generales, la eliminación de Gauss funciona de arriba hacia abajo, para producir una matriz en forma escalonada, mientras que la eliminación Gauss-Jordan continúa donde Gauss; es decir, inicia en la base para obtener una matriz en forma escalonada reducida. El método de eliminación de Gauss se resume de la siguiente manera.
1) Dado un sistema lineal expresado en forma de matriz, primero escribir la
correspondiente matriz aumentada: [A ǀ B].
2) Efectuar tantas operaciones de fila como sean necesarias hasta encontrar o transformar el arreglo de datos original de manera que se tenga una matriz triangular. Los intercambios y operaciones de fila deben de respetar las siguientes reglas: a) Se admite Intercambiar dos filas o cambiar el orden de las filas. b) Es posible sumar o restar una fila a otra. c) Se permite multiplicar o dividir una fila por una constante diferente de cero. d) Eliminar filas nulas, las que todos sus elementos son cero. e) Eliminar filas proporcionales. Que al realizar operaciones entre filas resulte en
una fila nula. 3) El objetivo de estas operaciones es la de transformar o reducir el original de la
matriz aumentada en una de las formas
[𝐴′|𝐵′]
Donde 𝐴′ es triangular superior (𝑎𝑖𝑗 = 0 𝑝𝑎𝑟𝑎 𝑖 > 𝑗), cualquier fila cero en la
parte inferior de la matriz, y la primera entrada distinta de cero en cualquier renglón está a la derecha de la entrada distinta de cero por primera vez en cualquiera de las filas superiores, este tipo de matriz se dice que es en forma escalonada.
4) Las soluciones del sistema se encuentran al sustituir los valores iniciando con la última línea o ecuación.
Recuérdese que, en cualquier paso del proceso de eliminación de Gauss, hay un sistema de ecuaciones que es equivalente; es decir, que tiene la misma solución del sistema original.

141
Ejemplo Resuelva el siguiente sistema usando eliminación de Gauss: 𝑥 − 2𝑦 + 𝑧 = 0
2𝑥 − 4𝑦 + 𝑧 = −13𝑥 + 𝑦 + 𝑧 = 2
La matriz aumentada que representa este sistema es [
1 −2 1 02 −4 1 −13 1 1 2
]
El primer objetivo es obtener de ceros por debajo de la primera entrada en la primera columna, que se traduce en la eliminación de la primera variable, x, a partir de las ecuaciones de segundo y tercero. Las operaciones de fila que lograr esto son las siguientes:
[ 1 −2 1 0 2 −4 1 −1 3 1 1 2
] R1 R2 R3
[1 −2 1 00 0 1 13 1 1 2
] R1
[1 −2 1 00 0 1 10 −7 2 −2
] R1
R2a= 2R1 - R2
R3
R2a
R3a= 3R1 – R3
[1 −2 1 00 −7 2 −20 0 1 1
] R1
[1 −2 1 00 1 −2/7 2/70 0 1 1
] R1
R3a R3b= -R3a/7
R2a R2a
El segundo objetivo es producir un cero por debajo de la segunda entrada en la segunda columna, que se traduce en la eliminación de la segunda variable ‘𝑦’ a partir de la primera ecuación. Una forma de hacer cero este valor sería multiplicar por dos la primera fila y restar el resultado a la segunda fila. De manera similar, hacemos cero el primer elemento de la tercera fila. El intercambio de las filas 2 y 3, no va a alterar la solución del sistema:
Dado que la matriz de coeficientes se ha transformado en forma escalonada, el "avance" de la eliminación gaussiana se ha completado. Lo que queda ahora es el uso de la tercera fila para evaluar la tercera incógnita, a continuación, hacer una copia de sustituir en la segunda fila para evaluar la segunda incógnita. La tercera fila de la matriz final se traduce en 𝑧 = 1. Realizamos sustituciones hacia atrás hasta obtener todos los valores.
Een la segunda ecuación tenemos 𝑦 − 2
7𝑧 =
2
7, si despejamos 𝑦; sustituimos el valor
encontrado antes de 𝑧 = 1; obtenemos un valor para de 𝑦𝑦 =4
7.
Finalmente, sustituimos estos dos valores en la primera ecuación 𝑥 − 2𝑦 + 𝑧 = 0, s, se
obtiene 𝑥 = 1
7. La solución de este sistema es por lo tanto, (𝑥, 𝑦, 𝑧) = (
1
7,4
7, 1).

142
Ejemplo: Resolver el siguiente sistema usando eliminación de Gauss:
2𝑥 − 𝑦 + 𝑧 = −6 𝑥 − 3𝑦 + 𝑧 = 2 −5𝑦 − 2𝑧 = −5
La matriz aumentada que representa este sistema es [
2 −1 1 −61 −3 1 20 −5 −2 −5
]
Procedemos como en el ejercicio anterior
[2 −1 1 −61 −3 1 20 −5 −2 −5
] R1 R2 R3
[2 −1 1 −60 5 −1 −100 −5 −2 −5
] R1
[2 −1 1 −60 5 −1 −100 0 −3 −15
] R1
R2a= R1 - 2R2 R2a
R3 R3a = R2a + R3
[
2 −1 1 −6
0 1 −1
5−2
0 0 1 5
]
R1
R2b= 1
5 R2a
R3b= −1
3 R3a
De la tercera fila, obtenemos el valor de 𝒛 = 𝟓. Sustituimos y resolvemos hacia atrás. La
segunda línea o ecuación es 𝒚 −𝟏
𝟓𝒛 = −𝟐, como 𝒛 = 𝟓 el valor de 𝒚 = −𝟏. Finalmente,
remplazamos los valores en la ecuación 𝟐𝒙 − 𝒚 + 𝒛 = −𝟔 y 𝒙 = −𝟔. La solución de este sistema es, por lo tanto, (x, y, z) = (-6, -1, 5). Ejemplo: Resuelva el siguiente sistema usando eliminación de Gauss:
𝑥 + 𝑦 − 3𝑧 = 4 2𝑥 + 𝑦 − 𝑧 = 2
3𝑥 + 2𝑦 − 4𝑧 = 7
La matriz aumentada que representa este sistema es [
1 1 −3 42 1 −1 23 2 −4 7
]
Iniciamos proceso de Gauss.
[ 1 1 −3 4 2 1 −1 2 3 2 −4 7
] R1
[ 1 1 −3 4 0 1 −5 6 0 1 −5 5
] R1
R2 R2a = 2R1 - R2
R3 R3a = 3R1 – R3
[ 1 1 −3 4 0 1 −5 6 0 0 0 1
] R1 R2a R3b = R2a - R3a
La tercera línea se rescribe como 0𝑥 + 0𝑦 + 0𝑧 = 1, una ecuación que no puede ser resuelta por cualquier valor que tomen las variables x, y, z. Así, el proceso se detiene, el sistema no tiene solución. Ejemplo: Resuelva el siguiente sistema usando eliminación de Gauss:
143
−2𝑥1 + 𝑥2 + 3𝑥3 = 12 𝑥1 + 2𝑥2 + 5𝑥3 = 10
6𝑥1 − 3𝑥2 − 9𝑥3 = 24
La matriz aumentada que representa este sistema es [
−2 1 3 12 1 2 5 10 6 −3 −9 24
]
[−2 1 3 12 1 2 5 10 6 −3 −9 24
] R1
[1 −1
2⁄−3
2⁄ −6
1 2 5 10 6 −3 −9 24
] R1a = −
1
2 R1
R2 R2
R3 R3
[
1 −12⁄
−32⁄ −6
1 52⁄
132⁄ 16
6 −3 −9 24
]
R1a
[
1 −12⁄
−32⁄ −6
1 5 2⁄ 13
2⁄ 16
0 0 0 60
]
R1a
R2a = R2 – R1a R2a R3 R3b = R3 - 6R1a
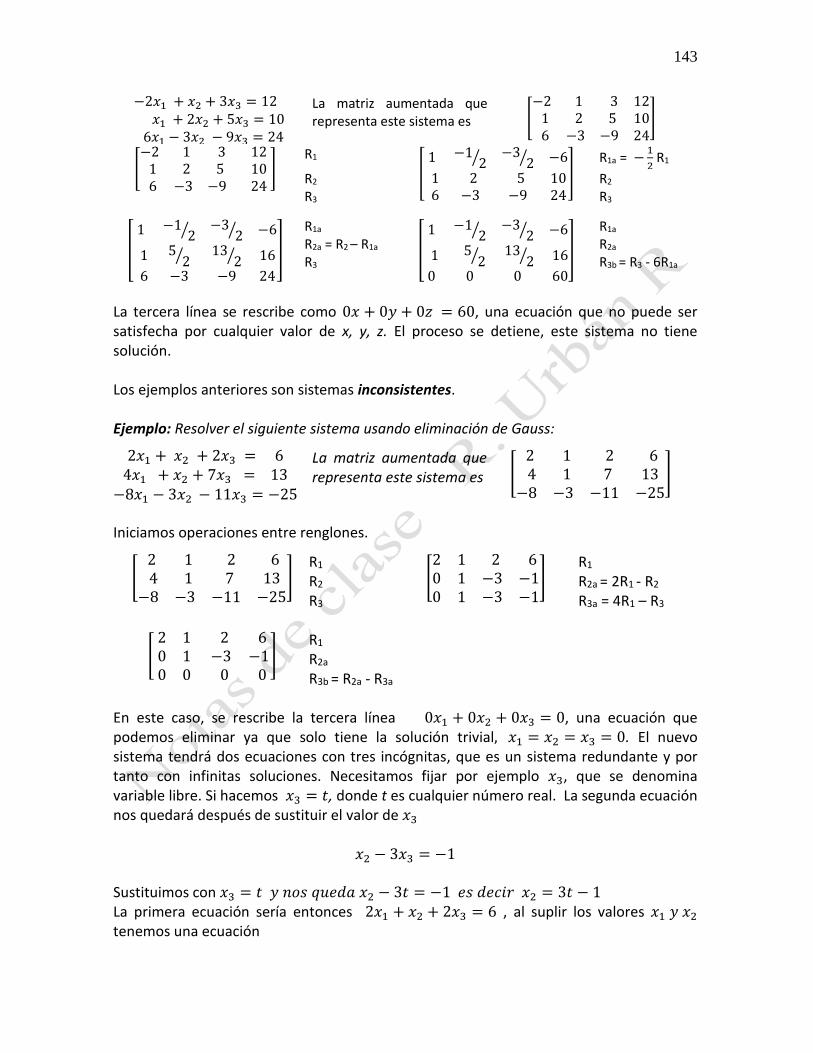
La tercera línea se rescribe como 0𝑥 + 0𝑦 + 0𝑧 = 60, una ecuación que no puede ser satisfecha por cualquier valor de x, y, z. El proceso se detiene, este sistema no tiene solución. Los ejemplos anteriores son sistemas inconsistentes. Ejemplo: Resolver el siguiente sistema usando eliminación de Gauss:
2𝑥1 + 𝑥2 + 2𝑥3 = 64𝑥1 + 𝑥2 + 7𝑥3 = 13
−8𝑥1 − 3𝑥2 − 11𝑥3 = −25
La matriz aumentada que representa este sistema es [
2 1 2 6 4 1 7 13−8 −3 −11 −25
]
Iniciamos operaciones entre renglones.
[ 2 1 2 6 4 1 7 13−8 −3 −11 −25
] R1
[2 1 2 60 1 −3 −10 1 −3 −1
] R1
R2 R2a = 2R1 - R2
R3
R3a = 4R1 – R3
[ 2 1 2 6 0 1 −3 −1 0 0 0 0
] R1 R2a R3b = R2a - R3a
En este caso, se rescribe la tercera línea 0𝑥1 + 0𝑥2 + 0𝑥3 = 0, una ecuación que podemos eliminar ya que solo tiene la solución trivial, 𝑥1 = 𝑥2 = 𝑥3 = 0. El nuevo sistema tendrá dos ecuaciones con tres incógnitas, que es un sistema redundante y por tanto con infinitas soluciones. Necesitamos fijar por ejemplo 𝑥3, que se denomina variable libre. Si hacemos 𝑥3 = 𝑡, donde t es cualquier número real. La segunda ecuación nos quedará después de sustituir el valor de 𝑥3
𝑥2 − 3𝑥3 = −1 Sustituimos con 𝑥3 = 𝑡 𝑦 𝑛𝑜𝑠 𝑞𝑢𝑒𝑑𝑎 𝑥2 − 3𝑡 = −1 𝑒𝑠 𝑑𝑒𝑐𝑖𝑟 𝑥2 = 3𝑡 − 1 La primera ecuación sería entonces 2𝑥1 + 𝑥2 + 2𝑥3 = 6 , al suplir los valores 𝑥1 𝑦 𝑥2
tenemos una ecuación

144
2𝑥1 + (3𝑡 − 1) + 2𝑡 = 6
2𝑥1 + 5𝑡 = 7 → 𝑥1 =7
2− 5
2⁄ 𝑡
Por lo tanto, todas las soluciones del sistema tienen la forma
(𝑥1, 𝑥2, 𝑥3) = (7
2− 5
2⁄ 𝑡, 3𝑡 − 1, 𝑡)
En que t es cualquier número real. Hay una infinidad de soluciones, ya que cada valor real de t, se obtiene una solución particular diferente. Por ejemplo, la elección de t = 1 da (𝑥, 𝑦, 𝑧) = (1, 2, 1), mientras que 𝑡 = 3 da (𝑥, 𝑦, 𝑧) = (−4, 8, 3). Ejemplo: Resolver el sistema de ecuaciones. 𝑥1 − 𝑥2 + 𝑥3 − 𝑥4 = 12𝑥1 + 𝑥2 − 3𝑥3 = 2
5𝑥1 − 2𝑥2 − 3𝑥4 = 5
La matriz aumentada que representa este sistema es [
1 −1 1 −1 12 1 −3 0 25 −2 0 −3 5
]
Como puede observar, este sistema tiene más variables que ecuaciones; por lo tanto, el sistema tiene soluciones infinitas.
[1 −1 1 −1 12 1 −3 0 25 −2 0 −3 5
] R1
[1 −1 1 −1 10 3 −5 2 00 3 −5 2 0
] R1
R2 R2a = R2 -2R1
R3 R3a = -5R1 + R3
[1 −1 1 −1 10 3 −5 2 00 0 0 0 0
] R1 R2a R3b = R3a – R2a
Ahora observamos solo dos filas distintas de cero lo que indica que tenemos 2 ecuaciones con 4 variables; esto indica que 2 de las variables son libres. Por lo tanto, si seleccionamos 𝑥3, 𝑥4, como las variables libres, 𝑥3 = 𝑡1 y 𝑥4 = 𝑡2. La segunda fila de la matriz ampliada se simplifica así;
3𝑥2 − 5𝑡1 + 2𝑡2 = 0 ⇒ 𝑥2 =1
3(5𝑡1 − 2𝑡2) = 0
y la primera fila queda
𝑥1 −1
3(5𝑡1 − 2𝑡2) + 𝑡1 − 𝑡2 = 1 ⇒ 𝑥1 = 1 +
1
3(2𝑡1 + 𝑡2)
Por lo tanto, las soluciones del sistema tienen la forma
(𝑥1, 𝑥2, 𝑥3, 𝑥4 ) = (1 +1
3(2𝑡1 + 𝑡2),
1
3(5𝑡1 − 2𝑡2), 𝑡1, 𝑡2)

145
Donde t1 t2 pueden tomar cualquier valor real. Ejemplo: Determinar todas las soluciones del sistema 𝑥2 − 3𝑥3 + 4𝑥4 = 1 2𝑥1 − 2𝑥2 + 𝑥3 = −1 2𝑥1 − 1𝑥2 − 2𝑥3 + 4𝑥4 = 0−6𝑥1 + 4𝑥2 + 3𝑥3 − 8𝑥4 = 1
La matriz aumentada que representa este sistema es
[
0 1 −3 4 1 2 −2 1 0 −1 2 −1 −2 4 0−6 4 3 −8 1
]
Las secuencias de operaciones por el método de Gauss
[
0 1 −3 4 1 2 −2 1 0 −1 2 −1 −2 4 0−6 4 3 −8 1
]
R1
[
2 −2 1 0 −1 0 1 −3 4 1 2 −1 −2 4 0−6 4 3 −8 1
]
R1a
R2 R2a
R3
R4
Cambiar R1 con R2
[
2 −2 1 0 −1 0 1 −3 4 1 0 −1 3 −4 −1 0 −2 6 −8 −2
]
R1a
[
2 −2 1 0 −10 1 −3 4 10 0 0 0 00 0 0 0 0
]
R1a
R2a R2a
R3a = R3 -R1a
R4a = 3R1 + R4
R3b = R2a + R3a
R4b = R2a + R4a
Dos filas tienen cero en todos sus elementos; por lo tanto, tenemos dos variables libres. 𝑥3 = 𝑡1 𝑦 𝑥4 = 𝑡2. La sustitución hacia atrás a partir de la segunda ecuación nos da;
𝑥2 − 3𝑥3 + 4𝑥4 = 1 ⇒ 𝑥2 = 1 + 3𝑡1 − 4𝑡2
Finalmente, la sustitución en la primera ecuación nos determina el valor de 𝑥1;
2𝑥1 − 2𝑥2 + 𝑥3 = −1 ⇒ 𝑥1 =1
2+
5
2𝑡1 − 4𝑡2
Finalmente, las soluciones de este sistema tienen la forma
(𝑥1, 𝑥2, 𝑥3, 𝑥4) = (1
2+
5
2𝑡1 − 4𝑡2, 1 + 3𝑡1 − 4𝑡2, 𝑡1, 𝑡2)
Donde 𝑡1 y 𝑡2son números reales. Ejemplos a) Un corredor de bolsa comercializa acciones de 4 empresas, Aceros S.A (A), Banco
Popular (B), Gamesa (G), y Maíz S.A (M). En los últimos 3 días, este lote de acciones ha modificado su valor comportándose de la siguiente manera. Hace dos días el valor del lote de acciones bajaron a 350 pesos, un día antes 425 y al cierre del día de hoy se mantuvieron al alza hasta llegar a 820 pesos. Las estadísticas de la bolsa de valores le informan que hace tres días las acciones de las empresas B y G bajaron 1 peso,

146
mientras que las acciones de A y M subieron 1 y 2 pesos respectivamente. Un día antes, las empresas A, B y M subieron 1, 2 y 2, mientras que las acciones de la empresa G bajaron 1 pesos. Finalmente, el día de hoy, las cuatro acciones A, B, G y M subieron a razón de 2, 1, 1 y 4 pesos respectivamente. Una empresa invirtió en este lote de acciones y quiere saber cuántas acciones de cada compañía posee. Si el inversionista cree que tiene 120 acciones de Maíz S. A., puede calcular ¿cuántas tiene de las demás empresas?
Solución,
Si 𝑥1 es el número de acciones de la empresa Aceros S.A 𝑥2 el número de acciones de la empresa Banco Popular 𝑥3 las acciones de la empresa Gamesa (G) y 𝑥4 las acciones de Maíz S.A (M) El sistema de ecuaciones correspondiente se forma así,
𝑥1 − 𝑥2 − 𝑥3 + 2𝑥4 = 350𝑥1 + 2𝑥2 − 𝑥3 + 2𝑥4 = 4252𝑥1 + 𝑥2 + 𝑥3 + 4𝑥4 = 820
Aplicamos el método de Gauss, partiendo de la matriz aumentada,
[1 −1 −1 2 3501 2 −1 2 4252 1 1 4 820
] R1
[1 −1 −1 2 3500 3 0 0 750 3 3 0 120
] 𝑅1
R2 𝑅2𝑎 = 𝑅2 − 𝑅1
R3 𝑅3𝑎 = 𝑅2 − 2𝑅1
[1 −1 −1 2 3500 3 0 0 750 0 −3 0 −45
] R1
𝑅2𝑎
𝑅3𝑏 = 𝑅3𝑎 3⁄
El sistema equivalente es,
𝑥1 − 𝑥2 − 𝑥3 + 2𝑥4 = 350 3𝑥2 = 75
−3𝑥3 = −45
El sistema es inconsistente, más variables que ecuaciones, el corredor de bolsa no puede determinar cuantas acciones de cada empresa tiene el inversor, solo puede determinar las acciones de las empresas 𝑥2 = 25 y 𝑥3 = 15, no así para las empresas 𝑥1 y 𝑥4 Si el inversionista tiene 120 acciones de la empresa Maíz S. A., variable 𝑥4, resolvemos hacia atrás y sustituimos 𝑥4 por el valor de 𝑡 = 120. Así,
𝑥1 − 25 − 15 + 2𝑡 = 350 → 𝑥1 = 390 − 2𝑡, 𝑐𝑜𝑚𝑜 𝑡 = 120 𝑥1 = 150
De esta manera, el inversor tiene las siguientes acciones,
147
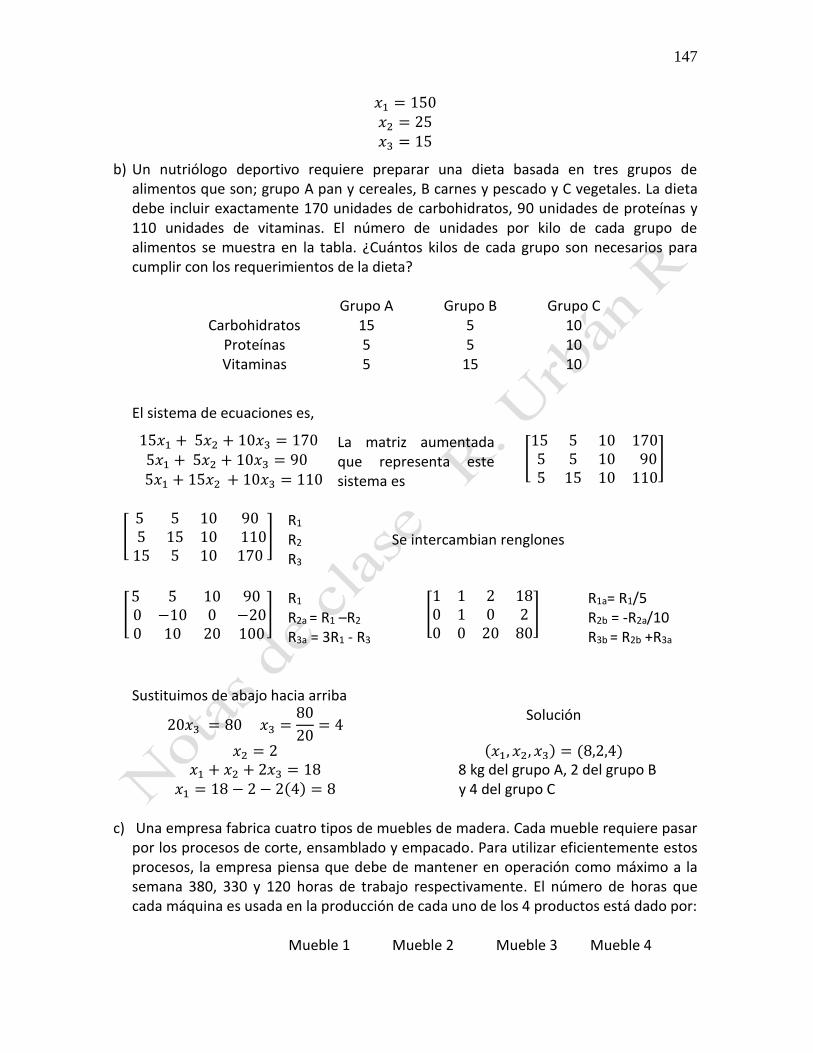
𝑥1 = 150𝑥2 = 25𝑥3 = 15
b) Un nutriólogo deportivo requiere preparar una dieta basada en tres grupos de alimentos que son; grupo A pan y cereales, B carnes y pescado y C vegetales. La dieta debe incluir exactamente 170 unidades de carbohidratos, 90 unidades de proteínas y 110 unidades de vitaminas. El número de unidades por kilo de cada grupo de alimentos se muestra en la tabla. ¿Cuántos kilos de cada grupo son necesarios para cumplir con los requerimientos de la dieta?
Grupo A Grupo B Grupo C Carbohidratos 15 5 10
Proteínas 5 5 10 Vitaminas 5 15 10
El sistema de ecuaciones es,
15𝑥1 + 5𝑥2 + 10𝑥3 = 170 5𝑥1 + 5𝑥2 + 10𝑥3 = 90
5𝑥1 + 15𝑥2 + 10𝑥3 = 110
La matriz aumentada que representa este sistema es
[15 5 10 170 5 5 10 90 5 15 10 110
]
[5 5 10 90 5 15 10 110 15 5 10 170
] R1
Se intercambian renglones
R2 R3
[5 5 10 90 0 −10 0 −20 0 10 20 100
] R1
[1 1 2 180 1 0 20 0 20 80
] R1a= R1/5
R2a = R1 –R2 R2b = -R2a/10
R3a = 3R1 - R3
R3b = R2b +R3a
Sustituimos de abajo hacia arriba
20𝑥3 = 80 𝑥3 =80
20= 4
Solución
𝑥2 = 2 (𝑥1, 𝑥2, 𝑥3) = (8,2,4) 𝑥1 + 𝑥2 + 2𝑥3 = 18 8 kg del grupo A, 2 del grupo B
𝑥1 = 18 − 2 − 2(4) = 8 y 4 del grupo C
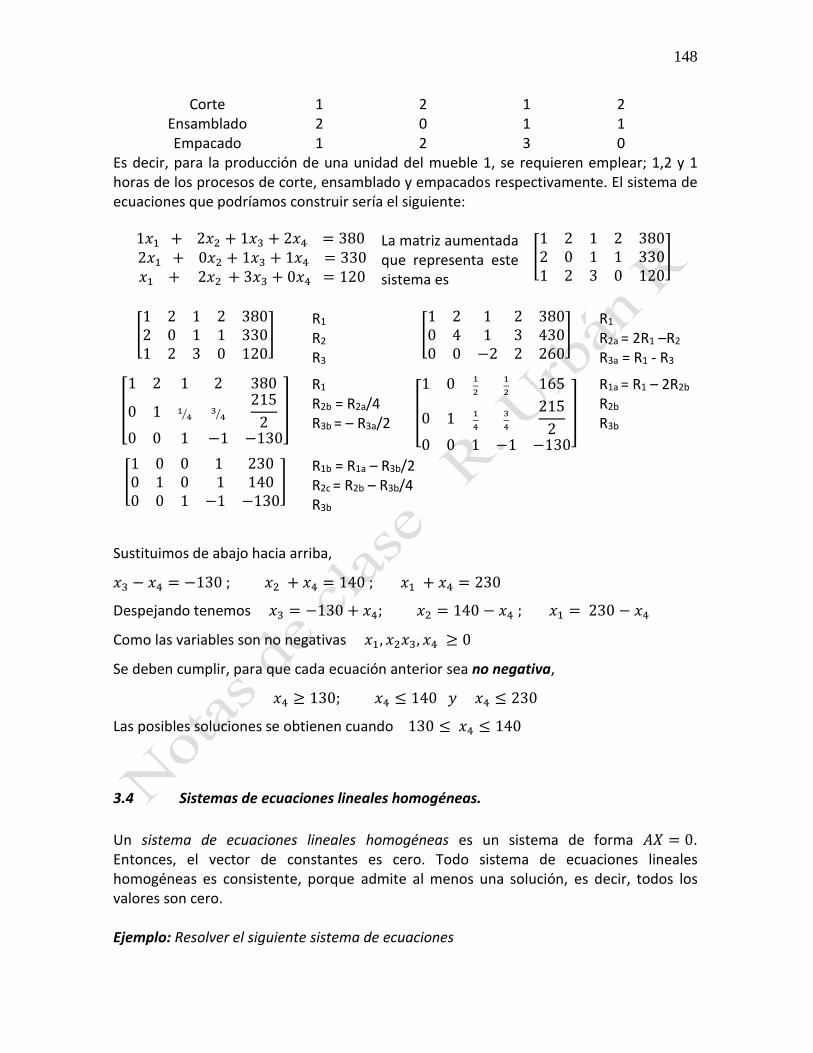
c) Una empresa fabrica cuatro tipos de muebles de madera. Cada mueble requiere pasar por los procesos de corte, ensamblado y empacado. Para utilizar eficientemente estos procesos, la empresa piensa que debe de mantener en operación como máximo a la semana 380, 330 y 120 horas de trabajo respectivamente. El número de horas que cada máquina es usada en la producción de cada uno de los 4 productos está dado por:
Mueble 1 Mueble 2 Mueble 3 Mueble 4
148
Corte 1 2 1 2 Ensamblado 2 0 1 1 Empacado 1 2 3 0
Es decir, para la producción de una unidad del mueble 1, se requieren emplear; 1,2 y 1 horas de los procesos de corte, ensamblado y empacados respectivamente. El sistema de ecuaciones que podríamos construir sería el siguiente: 1𝑥1 + 2𝑥2 + 1𝑥3 + 2𝑥4 = 380 2𝑥1 + 0𝑥2 + 1𝑥3 + 1𝑥4 = 330 𝑥1 + 2𝑥2 + 3𝑥3 + 0𝑥4 = 120
La matriz aumentada que representa este sistema es
[1 2 1 2 3802 0 1 1 3301 2 3 0 120
]
[1 2 1 2 3802 0 1 1 3301 2 3 0 120
] R1
[1 2 1 2 3800 4 1 3 4300 0 −2 2 260
] R1
R2 R2a = 2R1 –R2
R3 R3a = R1 - R3
[
1 2 1 2 380
0 1 14⁄
34⁄
215
20 0 1 −1 −130
]
R1
[
1 0 1
2
1
2165
0 1 1
4
3
4
215
20 0 1 −1 −130
]
R1a = R1 – 2R2b
R2b = R2a/4 R2b R3b = – R3a/2
R3b
[1 0 0 1 2300 1 0 1 1400 0 1 −1 −130
] R1b = R1a – R3b/2 R2c = R2b – R3b/4 R3b
Sustituimos de abajo hacia arriba,
𝑥3 − 𝑥4 = −130 ; 𝑥2 + 𝑥4 = 140 ; 𝑥1 + 𝑥4 = 230
Despejando tenemos 𝑥3 = −130 + 𝑥4; 𝑥2 = 140 − 𝑥4 ; 𝑥1 = 230 − 𝑥4
Como las variables son no negativas 𝑥1, 𝑥2𝑥3, 𝑥4 ≥ 0
Se deben cumplir, para que cada ecuación anterior sea no negativa,
𝑥4 ≥ 130; 𝑥4 ≤ 140 𝑦 𝑥4 ≤ 230
Las posibles soluciones se obtienen cuando 130 ≤ 𝑥4 ≤ 140
3.4 Sistemas de ecuaciones lineales homogéneas.
Un sistema de ecuaciones lineales homogéneas es un sistema de forma 𝐴𝑋 = 0. Entonces, el vector de constantes es cero. Todo sistema de ecuaciones lineales homogéneas es consistente, porque admite al menos una solución, es decir, todos los valores son cero. Ejemplo: Resolver el siguiente sistema de ecuaciones

149
2𝑥1 + 𝑥2 + 2𝑥3 = 0 4𝑥1 + 𝑥2 + 7𝑥3 = 0−8𝑥1 − 3𝑥2 − 11𝑥3 = 0
La matriz aumentada que representa este sistema es [
2 1 2 0 4 1 7 0−8 −3 −11 0
]
Este ejercicio lo resolvimos antes, en la versión no homogénea.
[ 2 1 2 0 4 1 7 0−8 −3 −11 0
] R1
[2 1 2 00 1 −3 00 1 −3 0
] R1
R2 R2a = 2R1 - R2
R3 R3a = 4R1 – R3
[ 2 1 2 0 0 1 −3 0 0 0 0 0
] R1 R2a R3b = R2a - R3a
Como se puede notar, los sistemas homogéneos tienen al menos la solución; la trivial, todas las variables valen cero. La solución diferente se obtendrá al fijar una de las variables. En nuestro ejercicio, vamos a fijar por ejemplo 𝑥3. Si hacemos 𝑥3 = 𝑡, donde t es cualquier número real. La segunda ecuación nos quedará, después de sustituir el valor de 𝑥3
𝑥2 − 3𝑥3 = 0 Sustituimos con 𝑥3 = 𝑡 𝑦 𝑛𝑜𝑠 𝑞𝑢𝑒𝑑𝑎 𝑥2 − 3𝑡 = 0 𝑒𝑠 𝑑𝑒𝑐𝑖𝑟 𝑥2 = 3𝑡 La primera ecuación sería entonces 2𝑥1 + 𝑥2 + 2𝑥3 = 0 , al sustituir los valores 𝑥1 𝑦 𝑥2
tenemos una ecuación 2𝑥1 + 3𝑡 + 2𝑡 = 0
2𝑥1 + 5𝑡 = 0 → 𝑥1 = −52⁄ 𝑡
Por lo tanto, todas las soluciones del sistema tienen la forma
(𝑥1, 𝑥2, 𝑥3) = (−52⁄ 𝑡, 3𝑡, 𝑡)
Observe la diferencia entre el conjunto de soluciones del sistema anterior con el actual. Los dos tienen la misma matriz de coeficientes 𝐴. Si contrastamos las dos soluciones podemos ver,
• solución general de 𝐴𝑋 = 0 (𝑥1, 𝑥2, 𝑥3) = (−52⁄ 𝑡, 3𝑡, 𝑡)
• solución general de 𝐴𝑋 = 𝐵 (𝑥1, 𝑥2, 𝑥3) = (−52⁄ 𝑡, 3𝑡, 𝑡) + (7
2, −1,0)
La solución general del sistema lineal no homogéneo es igual a la solución general del sistema homogéneo correspondiente, más una solución particular del sistema no homogéneo.
150
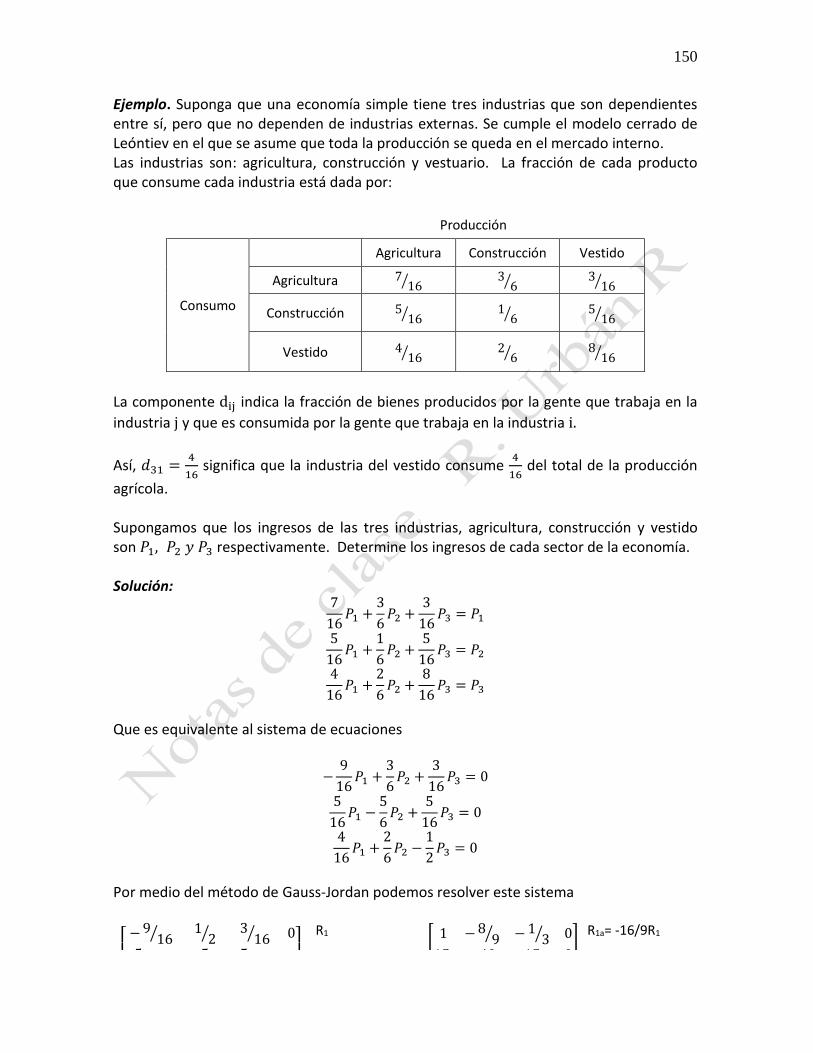
Ejemplo. Suponga que una economía simple tiene tres industrias que son dependientes entre sí, pero que no dependen de industrias externas. Se cumple el modelo cerrado de Leóntiev en el que se asume que toda la producción se queda en el mercado interno. Las industrias son: agricultura, construcción y vestuario. La fracción de cada producto que consume cada industria está dada por:
Producción
Consumo
Agricultura Construcción Vestido
Agricultura 716⁄ 3
6⁄ 316⁄
Construcción 516⁄ 1
6⁄ 516⁄
Vestido 416⁄ 2
6⁄ 816⁄
La componente dij indica la fracción de bienes producidos por la gente que trabaja en la
industria j y que es consumida por la gente que trabaja en la industria i.
Así, 𝑑31 =4
16 significa que la industria del vestido consume
4
16 del total de la producción
agrícola. Supongamos que los ingresos de las tres industrias, agricultura, construcción y vestido son 𝑃1, 𝑃2 𝑦 𝑃3 respectivamente. Determine los ingresos de cada sector de la economía. Solución:
7
16𝑃1 +
3
6𝑃2 +
3
16𝑃3 = 𝑃1
5
16𝑃1 +
1
6𝑃2 +
5
16𝑃3 = 𝑃2
4
16𝑃1 +
2
6𝑃2 +
8
16𝑃3 = 𝑃3
Que es equivalente al sistema de ecuaciones
−9
16𝑃1 +
3
6𝑃2 +
3
16𝑃3 = 0
5
16𝑃1 −
5
6𝑃2 +
5
16𝑃3 = 0
4
16𝑃1 +
2
6𝑃2 −
1
2𝑃3 = 0
Por medio del método de Gauss-Jordan podemos resolver este sistema
[ −
916⁄ 1
2⁄3
16⁄ 0
516⁄ −5
6⁄5
16⁄ 0
416⁄ 1
3⁄ −12⁄ 0]
R1
[ 1 −8
9⁄ −13⁄ 0
15 −40 15 012 16 −24 0
]
R1a= -16/9R1

151
R2 R2a = 48R2
R3 R3a = 48R3
[ 1 −8
9⁄ −13⁄ 0
0 803⁄ −20 0
0 −803⁄ 20 0]
R1a
[
1 −89⁄ −1
3⁄ 0
0 1 −34⁄ 0
0 0 0 0
]
R1a
R2b= 15R1a-R2a R2c= 3/80R2b
R3b = 12R1a - R3a R3c = 12R1a - R3b
[
1 0 −1 0
0 1 −34⁄ 0
0 0 0 0
]
R1b= 8/9R2c + R1a
R2c R3c
Al sustituir hacia atrás tenemos el sistema equivalente
𝑃1 = 𝑃3
𝑃2 =3
4𝑃3
𝑃3 = 𝑃3
Si hacemos 𝑃3 = 𝑡, donde t es cualquier número real no negativo. La solución es;
𝑃1 = 𝑡
𝑃2 =3
4𝑡
𝑃3 = 𝑡
Así, la solución es (𝑃1, 𝑃2, 𝑃3) = 𝑡 (1,3
4, 1). Hay infinitas soluciones, por ejemplo, para
𝑡 = 4 la solución sería (𝑃1, 𝑃2, 𝑃3) = (4,3,4). De esta manera, los ingresos de la industria de la agricultura, construcción y vestido están en la proporción 4:3:4. Ejercicios. 1. Resolver los siguientes sistemas de ecuaciones por el método de Gauss-Jordan
1.1. 𝑥 + 2𝑦 − 𝑧 = 22𝑥 − 𝑦 + 𝑧 = 33𝑥 + 𝑦 − 𝑧 = 2
1.7 𝑥1 + 3𝑥2 + 𝑥3 + 𝑥4 = 05𝑥1 − 2𝑥2 + 𝑥3 − 𝑥4 = 0
1.2. 𝑥1 + 2𝑥2 + 3𝑥3 = 142𝑥1 − 𝑥2 + 𝑥3 = 33𝑥1 + 2𝑥2 − 4𝑥3 = −5
1.8 𝑥1 + 3𝑥2 + 𝑥3 + 𝑥4 = 0
−2𝑥1 + 5𝑥2 − 𝑥3 + 𝑥4 = 0
152
1.3.
𝑥 − 𝑦 + 2𝑧 − 𝑤 = −22𝑥 + 𝑦 + 𝑧 = 4−3𝑥 − 𝑧 + 2𝑤 = 5𝑥 + 𝑦 + 𝑤 = 8
1.9
2𝑥1 − 𝑥2 − 5𝑥3 = 0 3𝑥1 − 4𝑥2 + 3𝑥3 − 2𝑥4 = 0 −𝑥1 − 𝑥2 + 2𝑥3 = 0
1.4. 3𝑥1 − 𝑥2 + 𝑥3 = 57𝑥1 + 5𝑥2 + 3𝑥3 = 122𝑥1 + 7𝑥2 + 2𝑥3 = −5
1.10
2𝑥 + 2𝑦 − 3𝑧 + 𝑢 − 2𝑣 = 0 −𝑥 + 𝑦 − 5𝑧 − 2𝑢 + 3𝑣 − 𝑤 = 0
3𝑥 + 𝑦 + 3𝑧 + 𝑢 − 𝑣 = 0
1.5. 𝑥 + 5𝑦 − 2𝑧 = 123𝑥 − 9𝑦 + 𝑧 = 64𝑥 − 4𝑦 + 2𝑧 = 6
1.11
𝑥1 − 2𝑥2 + 2𝑥3 = 0−2𝑥1 − 4𝑥2 + 𝑥3 = 0
𝑥1 + 𝑥2 + 2𝑥3 − 2𝑥4 = 0
1.6. 5𝑥1 + 2𝑥2 − 2𝑥3 + 3𝑥4 = 12𝑥1 + 3𝑥2 − 𝑥3 + 2𝑥4 = 6
7𝑥1 + 8𝑥2 − 4𝑥3 + 7𝑥4 = −4 1.12
3𝑥1 + 𝑥2 + 𝑥3 + 10𝑥4 = 0𝑥1 + 5𝑥2 + 𝑥3 + 16𝑥4 = 0
−8𝑥1 − 9𝑥2 − 3𝑥3 − 35𝑥4 = 0 4𝑥1 + 3𝑥2 + 𝑥3 + 9𝑥4 = 0
2. Una organización de productores fabrica tres productos. Para su fabricación, dispone de tres máquinas que estarían en operación 8 horas al día. El número de horas que cada máquina tarda en la elaboración de cada producto está dada por la siguiente tabla.
Producto 1 Producto 2 Producto 3 Máquina 1 1 1 2
Máquina 2 2 1 1 Máquina 3 1 3 0
Así, para la fabricación de una unidad del producto 1 se requiere que pase una hora en la maquina 1, dos horas en la máquina 2 y una hora en la máquina 3. Con estos datos la organización puede saber cuántas unidades de cada producto puede fabricar en una jornada de 8 horas. Si se recibe un pedido de 30, 25, 20 unidades de los productos 1,2,3 respectivamente, ¿En cuántos días podría realizar la entrega?
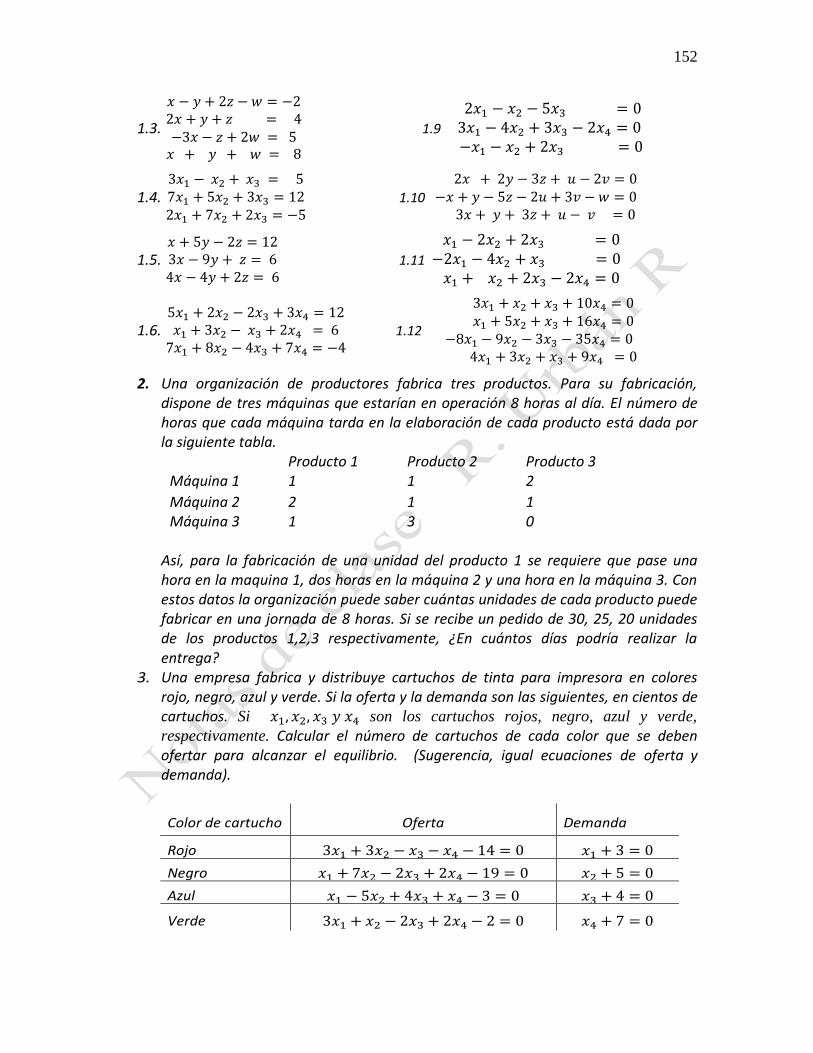
3. Una empresa fabrica y distribuye cartuchos de tinta para impresora en colores rojo, negro, azul y verde. Si la oferta y la demanda son las siguientes, en cientos de cartuchos. Si 𝑥1, 𝑥2, 𝑥3 𝑦 𝑥4 son los cartuchos rojos, negro, azul y verde,
respectivamente. Calcular el número de cartuchos de cada color que se deben ofertar para alcanzar el equilibrio. (Sugerencia, igual ecuaciones de oferta y demanda).
Color de cartucho Oferta Demanda
Rojo 3𝑥1 + 3𝑥2 − 𝑥3 − 𝑥4 − 14 = 0 𝑥1 + 3 = 0
Negro 𝑥1 + 7𝑥2 − 2𝑥3 + 2𝑥4 − 19 = 0 𝑥2 + 5 = 0
Azul 𝑥1 − 5𝑥2 + 4𝑥3 + 𝑥4 − 3 = 0 𝑥3 + 4 = 0
Verde 3𝑥1 + 𝑥2 − 2𝑥3 + 2𝑥4 − 2 = 0 𝑥4 + 7 = 0
153
“Hay tres tipos de cereal, de los cuales tres fardos del
primero, dos del segundo, y uno del tercero hacen 39
medidas. Dos del primero, tres del segundo y 1 del
tercero hacen 34 medidas. Y uno del primero, dos del
segundo y tres del tercero hacen 26 medidas. ¿Cuántas
medidas de cereal son contenidas en un fardo de cada
tipo?"3
3.5 Matrices El uso de las técnicas matriciales es muy antiguo, se tienen evidencias de que los babilónicos en el siglo IV A. C., ya las usaban, aunque en forma rudimentaria para resolver problemas de solución de ecuaciones. Algunas de estas prácticas se registraron en tablillas de arcilla, de las cuales se conservan algunas con ejemplos de estos logros. No obstante, los chinos estuvieron mucho más cerca de las matrices que los babilonios, como se muestra en el libro: "Nueve Capítulos de Arte Matemático", escrito en el siglo II A.C. No obstante, las evidencias anteriores, es hasta el siglo XIX cuando en 1858 Cayley4 escribe sus “Memorias sobre la teoría de matrices” que contiene la primera definición abstracta de matriz. Él muestra que los arreglos de coeficiente estudiados tempranamente para formas cuadráticas y para transformaciones lineales son casos especiales de su concepto general. Cayley introduce las operaciones básicas de adición de matrices, multiplicación, multiplicación por un escalar y matriz inversa. Las matrices tienen una importancia fundamental en el análisis económico sobre todo en el estudio de sistemas de ecuaciones lineales, como en el modelo insumo-producto. Cuando trabajamos con modelos lineales de dos o tres ecuaciones, para resolver este tipo de sistemas, basta con aplicar algebra elemental, mediante métodos de sustitución, o bien quizá mediante representaciones gráficas. La solución a estos sistemas se complica cuando el número de ecuaciones es superior a tres y cada vez más complicado con cada ecuación que aumentamos al sistema. Aplicar métodos de sustitución algebraicos resulta muy engorroso y ni pensar en utilizar algún método gráfico.
Una matriz es un arreglo rectangular ordenado de números, comúnmente llamados escalares, dispuestos en m renglones y n columnas.
3 "Nueve Capítulos de Arte Matemático", escrito durante la Dinastía Han entre los años 200 y 100 antes de Cristo, de este libro tomamos el ejemplo sobre el uso de las matriciales para resolver sistemas de ecuaciones lineales. 4 Arthur Cayley, 1821-1895. Matemático inglés. Trabajo en la Universidad de Cambridge Inglaterra y es considerado uno de los tres matemáticos más prolíficos.

154
(
𝑎11 𝑎12 … . 𝑎1𝑛
𝑎21 𝑎22 … . 𝑎2𝑛
… . … . … . … .𝑎𝑚1 𝑎𝑚2 … . 𝑎𝑚𝑛
)
Es costumbre utilizar letras mayúsculas para denotar matrices y minúsculas para indicar los elementos de una matriz.
Orden o Dimensión de una matriz
Se llama orden o dimensión de una matriz al número de renglones y columnas que posee. Es decir, dada una matriz donde 𝑚 es el número de renglones y 𝑛 el de columnas, el orden de esta será de 3 𝑥 3, como la siguiente.
𝐴 = (
𝑎11 𝑎12 𝑎13
𝑎21 𝑎22 𝑎23
𝑎31 𝑎32 𝑎33
)
Por ejemplo, dadas las siguientes matrices
𝐵 = (5 79 4
) 𝐶 = (𝜋 3 √7 𝑒2) 𝐷 = (−3 49 −25 1
)
Son matrices, donde 𝐵 es una matriz de orden 2 × 2, 𝐶 es de 1 × 4 y 𝐷 es de 3 × 3. Una matriz de m renglones y n columnas donde 𝑚 ≠ 𝑛, se denomina rectangular. En el caso de que 𝑚 = 𝑛, matriz es cuadrada de orden 𝑛. Si 𝐴 es una matriz de orden 𝑚 × 𝑛, los elementos 𝑎11, 𝑎22, … . . , 𝑎𝑛𝑛 forman la diagonal principal de la matriz, los elementos 𝑎11 arriba a la izquierda hasta 𝑎𝑛𝑛 abajo a la derecha. En el ejemplo anterior B es una matriz cuadrada de orden 2𝑥2 y la diagonal principal son los valores de 5 y 4.
𝐴 = (
𝑎11 𝑎12 𝑎13
𝑎21 𝑎22 𝑎23
𝑎31 𝑎32 𝑎33
)
Cada elemento del arreglo matricial se puede representar por dos subíndices; 𝑎𝑖𝑗 el primero indica el renglón y el
segundo la columna donde se ubica el elemento. Es decir, el elemento 𝑎12, se refiere al elemento que está geográficamente en el arreglo en el primer renglón y la segunda columna.

155
Rango de una Matriz5. Toda matriz A se puede reducir a su forma escalonada. Llamaremos rango de una matriz A, al número de renglones no nulos que se obtienen al reducirla a su forma escalonada. Por ejemplo, la matriz siguiente,
Es de rango; 𝑟𝑔(𝐴) = 3
Esta matriz es de rango, 𝑟𝑔(𝐴) = 2 Para toda matriz A se cumple que
𝑟𝑔(𝐴) ≤ 𝑛𝑢𝑚𝑒𝑟𝑜 𝑑𝑒 𝑙𝑖𝑛𝑒𝑎𝑠 𝑑𝑒 𝐴 𝑟𝑔(𝐴) ≤ 𝑛𝑢𝑚𝑒𝑟𝑜 𝑑𝑒 𝑐𝑜𝑙𝑢𝑚𝑛𝑎𝑠 𝑑𝑒 𝐴
De esta manera si tenemos una matriz en su forma escalonada como la siguiente
𝐴 = [
1 3 5 20 3 1 70 0 5 −10 0 0 0
]
Llamaremos pivotes a los primeros coeficientes no nulos, de las líneas no nulas que están en renglones y columnas distintos, la mayoría de las veces en la diagonal principal. Así, tenemos una nueva forma de encontrar el rango de una matriz.
𝑛ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑝𝑖𝑣𝑜𝑡𝑒𝑠 = 𝑟𝑔(𝐴)
Consideremos un sistema de ecuaciones lineales, 𝑚 ecuaciones y 𝑛 incógnitas, que llamamos 𝐴 y un matriz, o vector columna, 𝐵 de constantes. La matriz aumentada
equivalente es �̂� = (𝐴|𝐵). Para valor de la matriz 𝐵, el sistema de ecuaciones tiene solución siempre que se cumpla que,
𝑟𝑔(𝐴) = 𝑟𝑔(�̂�)
5 El rango es útil para definir la independencia lineal de una matriz. Para el objetivo de este libro, basta con
definir el concepto como; el número máximo de columnas o renglones de manera que ninguno resulte de la
combinación lineal de los restantes.
[ 1 −3 6 22 −5 10 33 −8 17 4
] R1
[ 1 −3 6 20 1 −2 −10 1 −1 −2
]
[ 1 −3 6 20 1 −2 −10 0 1 −1
] R2a = R2 -2R1 R3a = R3 - 3R1 R3a = R3 – R2
[1 3 21 4 10 1 −1
] R1
[ 1 3 20 1 −10 1 −1
]
[ 1 3 60 1 −10 0 0
] R2a = R2 -R1 R3a = R3 - 3R1 R3a = R3 – R2

156
Algunas matrices especiales.
a) Las matrices de orden 1 × 𝑛 ó 𝑛 × 1 se llaman matriz renglón o matriz columna.
Por ejemplo, la matriz C del ejemplo anterior. b) Una matriz en la que todos sus elementos son 0, se llama Matriz nula. c) Una matriz se dice que es escalonada, escalonada por filas o que está en forma
escalonada si todos los elementos que están debajo de la diagonal principal son cero.
[3 1 50 2 60 0 4
]
Esta matriz también se conoce como Matriz triangular superior, el caso inverso en el que los elementos arriba de la diagonal son cero se le llama matriz triangular inferior.
d) Si en un arreglo matricial todos los elementos de la diagonal principal son 1 y el
resto de los elementos son cero se llama matriz identidad.
𝐼 = [1 0 00 1 00 0 1
]
e) Una matriz en la que todos sus elementos son cero excepto los de la diagonal principal, es una matriz diagonal.
3.5.1 Operaciones con matrices.
Es importante conocer y tener para las aplicaciones de las matrices que operaciones se pueden realizar con ellas y las reglas para efectuarlas. Es importante destacar que para realizar estas operaciones las matrices deben ser compatibles, en cada caso se establecerán las reglas para que se cumpla esta relación.
Igualdad
Dos matrices cuadradas de orden 𝑚 × 𝑛 son iguales, 𝐴 = 𝐵, si todo elemento de 𝐴 es igual a su correspondiente elemento en 𝐵, es decir 𝑎𝑖𝑗 = 𝑏𝑖𝑗 para todo 𝑖, 𝑗. La igualdad de
matrices posee las siguientes propiedades:
a) 𝐴 = 𝐴; 𝑅𝑒𝑓𝑙𝑒𝑥𝑖𝑣𝑎 b) 𝑆𝑖 𝐴 = 𝐵 𝑒𝑛𝑡𝑜𝑛𝑐𝑒𝑠 𝐵 = 𝐴 𝑆𝑖𝑚𝑒𝑡𝑟í𝑎 c) 𝑆𝑖 𝐴 = 𝐵 𝑦 𝐵 = 𝐶 𝑒𝑛𝑡𝑜𝑛𝑐𝑒𝑠 𝐶 = 𝐴 𝑇𝑟𝑎𝑛𝑠𝑖𝑡𝑖𝑣𝑎

157
Dadas dos matrices 𝐴 = [2 10 3
] y 𝐵 = [2 10 3
] las matrices se dicen iguales porque sus
elementos son iguales. Suma y diferencia de matrices Dadas dos matrices 𝑨 = [𝑎𝑖𝑗] y 𝑩 = [𝑏𝑖𝑗] del mismo orden 𝑚 × 𝑛, la suma de 𝑨 + 𝑩, o la diferencia 𝐴 − 𝐵 da como solución otra matriz del mismo orden 𝑚 × 𝑛 cuyos elementos son los correspondientes elementos de 𝑨 y 𝑩. Así, 𝐴 + 𝐵 = 𝑎𝑖𝑗 + 𝑏𝑖𝑗 para la
suma o bien, 𝐴 − 𝐵 = 𝑎𝑖𝑗 − 𝑏𝑖𝑗 en el caso de la diferencia.
Si las matrices no son del mismo orden, tampoco existe su suma.
Ejemplos: Para las siguientes matrices, [1 24 0
] + [3 5 28 6 1
] la operación suma no se
puede efectuar, no son del mismo orden. En estos otros ejemplos, si encontramos compatibilidad y por lo tanto la suma se puede efectuar.
[1 24 0
] + [3 58 6
] = [1 + 3 2 + 54 + 8 0 + 6
] = [4 712 6
]
[4 6 −21 2 05 3 5
] − [8 6 03 1 43 2 −1
] = [4 − 8 6 − 6 −2 − 01 − 3 2 − 1 0 − 45 − 3 3 − 2 5 + 1
] = [−4 0 −2−2 1 −4 2 1 6
]
Propiedades
a) (𝐴 + 𝐵) + 𝐶 = 𝐴 + (𝐵 + 𝐶) 𝐴𝑠𝑜𝑐𝑖𝑎𝑡𝑖𝑣𝑎 b) 𝐴 + 𝐵 = 𝐵 + 𝐴 𝐶𝑜𝑛𝑚𝑢𝑡𝑎𝑡𝑖𝑣𝑎 c) 𝐴 + (−𝐴) = (−𝐴) + 𝐴 𝑆𝑖𝑚𝑒𝑡𝑟𝑖𝑎 d) 𝐴 + 0 = 0 + 𝐴 = 𝐴 𝑁𝑒𝑢𝑡𝑟𝑜
Producto de una matriz por un escalar. Dados una matriz 𝑨 = [𝑎𝑖𝑗] de orden 𝑚 × 𝑛 y un escalar λ, la matriz producto 𝜆𝐴 es otra matriz de orden 𝑚 × 𝑛 que se obtiene multiplicando cada elemento de A por λ. Así, 𝜆𝐴 = (𝜆 𝑎𝑖𝑗)
Si λ = 3 y la matriz M = [4 21 53 −1
] la multiplicación da como resultado una nueva matriz

158
R = 3 [4 21 53 −1
] = [12 63 159 −3
]
Propiedades
Sean A y B matrices y 𝜆1, 𝜆2 escalares
a) 𝜆1(𝐴 + 𝐵) = 𝜆1𝐴 + 𝜆1𝐵 𝐷𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑡𝑖𝑣𝑎 (𝑑𝑒 𝑒𝑠𝑐𝑎𝑙𝑎𝑟) b) (𝜆1 + 𝜆2)𝐴 = 𝜆1𝐴 + 𝜆2𝐴 𝐷𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑡𝑖𝑣𝑎 (𝑑𝑒 𝑚𝑎𝑡𝑟𝑖𝑧) c) 𝜆1(𝜆2𝐴) = (𝜆1𝜆2)𝐴 𝐴𝑠𝑜𝑐𝑖𝑎𝑡𝑖𝑣𝑎
3.5.2 Transpuesta de una matriz. Para una matriz 𝐴 cualquiera de orden 𝑚 × 𝑛, se define su transpuesta como otra matriz del mismo orden que la escribe 𝐴𝑇, cuyos renglones y columnas son las de A intercambiadas. El orden de esta última matriz es de 𝑛 × 𝑚 donde se intercambian las filas y las columnas de la matriz (A).
Ejemplos 𝐴 = [1 63 8
] 𝐴𝑇 = [1 36 8
]
𝐵 = [2 75 39 1
] 𝐵𝑇 = [2 5 97 3 1
]
Propiedades.
a) (𝐴 + 𝐵)𝑇 = 𝐴𝑇 + 𝐵𝑇 b) (𝜆𝐴)𝑇 = 𝜆𝐴𝑇 c) (𝐴𝐵)𝑇 = 𝐴𝑇𝐵𝑇 d) (𝐴𝑇)𝑇 = 𝐴
De estas propiedades podemos definir Matriz simétrica. Una matriz se llama simétrica si se cumple que 𝐴𝑇 = 𝐴 por ejemplo,
[4 1 51 2 35 3 5
]
Ejemplo. Dadas las matrices 𝑃 = [4 1 −21 2 01 3 2
] y 𝑄 = [−2 6 40 1 25 3 5
] Calcular 𝑃 − 2𝑄𝑇
Para que una matriz sea simétrica se debe cumplir que los elementos arriba y debajo de la diagonal principal sean simétricos

159
𝑃 − 2𝑄𝑇 = [4 1 −21 2 01 3 2
] − 2 [−2 6 40 1 25 3 5
]
𝑇
= [4 1 −21 2 01 3 2
] − 2 [−2 0 56 1 34 2 5
]
[4 1 −21 2 01 3 2
] − 2 [−2 0 56 1 34 2 5
] = [8 1 −12
−11 0 −67 −1 −8
]
3.5.3 Traza de una Matriz.
Sea una matriz cuadrada A de orden 𝑛, [
𝑎11 ⋯ 𝑎1𝑛
⋮ ⋱ ⋮𝑎𝑛1 ⋯ 𝑎𝑛𝑛
]
Se define la traza de la matriz A y se denota por 𝑡𝑟(𝐴), como el número que se obtiene al sumar los elementos de la diagonal de la matriz.
𝑡𝑟(𝐴) = 𝑎11+𝑎22+ ⋯+ 𝑎𝑛𝑛
Por ejemplo, sean las matrices 𝐴 = [4 1 −21 2 01 3 2
] y 𝐵 = [2 03 2
]
𝑡𝑟(𝐴) = 4 + 2 + 2 = 8; 𝑡𝑟(𝐵) = 2 + 2 = 4 Propiedades.
a) 𝑡𝑟(𝐴 + 𝐵) = 𝑡𝑟(𝐴) + 𝑡𝑟(𝐵) Si 𝐴 y 𝐵 son dos matrices 𝑛 𝑥 𝑛
b) 𝑡𝑟(𝜆𝐴) = 𝜆 𝑡𝑟(𝐴) Para todo 𝜆 𝜖ℝ
c) 𝑡𝑟(𝐴𝑇) = 𝑡𝑟(𝐴)
d) 𝑡𝑟(𝐴𝐵) = 𝑡𝑟(𝐵𝐴)
3.5.4 Producto de matrices Dadas dos matrices A y B de orden 𝑚𝐴 × 𝑛𝐴 y 𝑚𝐵 × 𝑛𝐵 respectivamente, se requiere para poder obtener su producto, que el número de columnas de A sea igual al número de filas de B. Es decir que 𝑛𝐴 = 𝑚𝐵. La matriz resultante, si existe, será de orden 𝑚𝐴 × 𝑛𝐵.
La operación de 𝐴 × 𝐵 = 𝐶, se obtiene al multiplican los renglones de la matriz A por las columnas de B, elemento a elemento y se suman sus resultados. De esta manera el
elemento 𝑖, 𝑗 de la matriz resultado, resulta de multiplicar los elementos del renglón 𝑖 de
la matriz A por los elementos de la columna 𝑗 de B y sumando sus resultados.
160
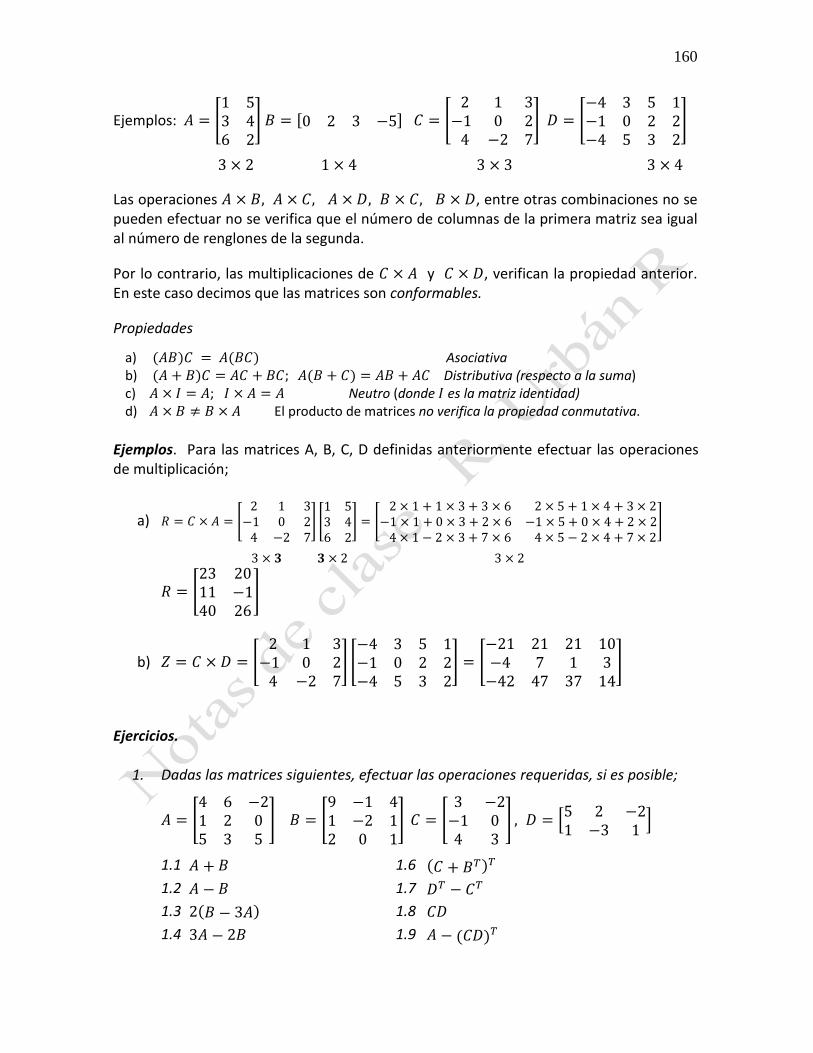
Ejemplos: 𝐴 = [1 53 46 2
] 𝐵 = [0 2 3 −5] 𝐶 = [ 2 1 3−1 0 2 4 −2 7
] 𝐷 = [−4 3 5 1−1 0 2 2−4 5 3 2
]
3 × 2 1 × 4 3 × 3 3 × 4 Las operaciones 𝐴 × 𝐵, 𝐴 × 𝐶, 𝐴 × 𝐷, 𝐵 × 𝐶, 𝐵 × 𝐷, entre otras combinaciones no se pueden efectuar no se verifica que el número de columnas de la primera matriz sea igual al número de renglones de la segunda. Por lo contrario, las multiplicaciones de 𝐶 × 𝐴 y 𝐶 × 𝐷, verifican la propiedad anterior. En este caso decimos que las matrices son conformables. Propiedades
a) (𝐴𝐵)𝐶 = 𝐴(𝐵𝐶) Asociativa b) (𝐴 + 𝐵)𝐶 = 𝐴𝐶 + 𝐵𝐶; 𝐴(𝐵 + 𝐶) = 𝐴𝐵 + 𝐴𝐶 Distributiva (respecto a la suma) c) 𝐴 × 𝐼 = 𝐴; 𝐼 × 𝐴 = 𝐴 Neutro (donde 𝐼 es la matriz identidad) d) 𝐴 × 𝐵 ≠ 𝐵 × 𝐴 El producto de matrices no verifica la propiedad conmutativa.
Ejemplos. Para las matrices A, B, C, D definidas anteriormente efectuar las operaciones de multiplicación;
a) 𝑅 = 𝐶 × 𝐴 = [ 2 1 3−1 0 2 4 −2 7
] [1 53 46 2
] = [ 2 × 1 + 1 × 3 + 3 × 6 2 × 5 + 1 × 4 + 3 × 2−1 × 1 + 0 × 3 + 2 × 6 −1 × 5 + 0 × 4 + 2 × 2 4 × 1 − 2 × 3 + 7 × 6 4 × 5 − 2 × 4 + 7 × 2
]
3 × 𝟑 𝟑 × 2 3 × 2
𝑅 = [23 2011 −140 26
]
b) 𝑍 = 𝐶 × 𝐷 = [ 2 1 3−1 0 2 4 −2 7
] [−4 3 5 1−1 0 2 2−4 5 3 2
] = [−21 21 21 10−4 7 1 3−42 47 37 14
]
Ejercicios.
1. Dadas las matrices siguientes, efectuar las operaciones requeridas, si es posible;
𝐴 = [4 6 −21 2 05 3 5
] 𝐵 = [9 −1 41 −2 12 0 1
] 𝐶 = [3 −2
−1 04 3
] , 𝐷 = [5 2 −21 −3 1
]
1.1 𝐴 + 𝐵 1.6 (𝐶 + 𝐵𝑇)𝑇
1.2 𝐴 − 𝐵 1.7 𝐷𝑇 − 𝐶𝑇
1.3 2(𝐵 − 3𝐴) 1.8 𝐶𝐷
1.4 3𝐴 − 2𝐵 1.9 𝐴 − (𝐶𝐷)𝑇

161
1.5 3𝐵 + 𝐴𝑇 1.10 (𝐵 − 𝐴) − 𝐶𝐷
2. Para las siguientes matrices, determinar, si es posible, (𝐴𝐵)𝐶 , 𝐴(𝐵𝐶),
(𝐴𝐵𝑇)(𝐶𝐵), (𝐵𝐶)𝑇 − 𝐶𝑇𝐴
2.1. 𝐴 = [1 25 3
] , 𝐵 = [2 73 5
] , 𝐶 = [4 −21 0
]
2.2. 𝐴 = [2 1 35 3 5
] , 𝐵 = [4 −21 05 5
] , 𝐶 = [1 2 05 3 5
]
2.3. 𝐴 = [2 1 35 3 5
] , 𝐵 = [4 −2 1 05 5
1 2 3
] , 𝐶 = [1 25 30 5
]
2.4. 𝐴 = [1 24 32 1
] , 𝐵 = [4 −2 11 0 2
] , 𝐶 = [1 25 30 5
]
3.5.5 Determinantes
El determinante de una matriz cuadrada es un número que entre otras cosas nos permite simplificar las operaciones matriciales particularmente en el cálculo de la matriz inversa. Dada una matriz 𝐴, su determinante que lo vamos a denotar por det(𝐴) o bien |𝐴|, es un número que sirve, entre otras cosas para determinar si un sistema de ecuaciones es singular o si este es consistente. Es decir, si el sistema tiene solución. Para las matrices este valor nos sirve para determinar si una matriz tiene inversa. Algunas propiedades del determinante nos dicen que el determinante es un número real, no es una matriz y quizá la más importante; la inversa de una matriz sólo existirá si el determinante es diferente de cero. Determinante de una matriz de orden 2x2. Si tenemos una matriz de orden 2, encontrar el determinante es relativamente fácil. Se resuelve si multiplicamos los elementos de la diagonal principal menos el producto de los elementos de la diagonal secundaria. Es decir,
𝑆 = [𝑠11 𝑠12
𝑠21 𝑠22] det(𝐴) = |𝐴| = |
𝑠11 𝑠12
𝑠21 𝑠22| = 𝑠11𝑠22 − 𝑠21𝑠12
Si 𝐴 = [5 63 8
] el det(𝐴) o bien |𝐴| = |5 63 8
| = (5)(8) − (3)(6) = 22

162
Determinante de una matriz de orden 3x3. Para encontrar el determinante de una matriz de orden 3 es común utilizar la regla de Sarrus6. Este método consiste en sumar el producto de las diagonales descendentes7 y a este resultado, se le resta el producto de las diagonales ascendentes. Para determinar con mayor seguridad las diagonales descendentes y las ascendentes, se construye una matriz aumentada a la que se añaden las dos primeras columnas. Un resultado similar se obtendría si añadimos a la matriz original los primeros dos renglones. La gráfica del procedimiento de cálculo es la siguiente
𝐶 = [
𝑐11 𝑐12 𝑐13 𝑐21 𝑐22 𝑐23
𝑐31 𝑐32 𝑐33
𝑐11 𝑐12
𝑐21 𝑐22
𝑐31 𝑐32
]
= (𝐶11𝐶22𝐶33 + 𝐶12𝐶23𝐶31 + 𝐶13𝐶21𝐶32) − (𝐶31𝐶22𝐶13 + 𝐶32𝐶23𝐶11 + 𝐶33𝐶21𝐶12)
Dada la matriz 𝐴 = [4 3 71 −2 −42 0 3
] aplicamos la regla de Sarrus y obtenemos la matriz
aumentada;
𝐴 = [4 3 7 4 31 −2 −4 1 −22 0 3 2 0
]
= [(4)(−2)(3) + (3)(−4)(2) + (7)(1)(0)]
−[(2)(−2)(7) + (0)(−4)(4) + (3)(1)(3)]
= [−24 − 24 + 0] − [−28 + 0 + 9] = −48 + 19 = −29 |𝐴| = −29
Para calcular el determinante de una matriz de orden 𝑛 > 3, es más conveniente usar el método de cofactores. El mismo resultado obtendríamos si añadimos los dos primeros renglones a la matriz original
𝐴 =
[ 4 3 71 −2 −42 0 34 3 71 −2 −4]
= [(4)(−2)(3) + (1)(0)(7) + (2)(3)(−4)]
= −[(1)(3)(3) + (4)(0)4 + (2)(−2)(7)] = −48 + 19 = −29
6 Sarrus Pierre Frederick, (1798-1891) Matemático Francés, miembro de la Academia Francesa de Ciencias. 7 Se llama diagonal descendente, a la diagonal que inicia en el extremo superior izquierdo y desciende hasta el inferior derecho. Por lo contrario las diagonales ascendentes, inician en el extremo inferior izquierdo y van hasta el superior derecho

163
3.5.6 Menores y cofactores de una matriz
Antes de calcular el determinante por el método de cofactores tenemos que encontrar los menores de una matriz. El menor de un elemento de una matriz es el determinante que resulta de eliminar el renglón y la columna del elemento. La notación 𝑀𝑖𝑗 se utiliza para representar el menor
del elemento 𝑎𝑖𝑗 de la matriz, renglón 𝑖 y columna 𝑗. Es decir, 𝑀23 significaría el valor del
determinante que resulta de eliminar el renglón 2 y la columna 3 de un arreglo matricial.
Considere una matriz 𝐴 = [ 2 3 5−1 6 −4 2 0 3
] tendrá 3𝑥3 = 9 menores.
Para encontrar por ejemplo los menores que corresponden a los elementos de la primera fila es decir 𝑀11, 𝑀12, 𝑀13 se calculan de la siguiente forma;
𝑀11 = |6 −40 3
| = 18 El determinante que resulta de eliminar el primer renglón y la primera columna.
𝑀12 = |−1 −4 2 3
| = 5 El determinante que resulta de eliminar primer renglón, segunda columna.
𝑀13 = |−1 6 2 0
| = −12 El determinante que resulta de eliminar primer renglón, tercera columna.
Para la matriz anterior 𝐴, los menores que se pueden formar serían,
[𝑀11 𝑀12 𝑀13
𝑀21 𝑀22 𝑀23
𝑀31 𝑀32 𝑀33
] =
[ |6 −40 3
| |−1 −4 2 3
| |−1 6 2 0
|
|3 50 3
| | 2 5 2 3
| | 2 3 2 0
|
|3 56 −4
| | 2 5−1 −4
| | 2 3−1 6
|]
= [18 5 −12
9 −4 −6
−42 −3 15
]
Esta última matriz muestra los menores obtenidos de la matriz 𝑨. No es costumbre llamarla matriz de menores. Nos referimos simplemente al menor 𝑀𝑖𝑗 de una matriz.
3.5.6.1 Cálculo del determinante por el Método de cofactores El cofactor del elemento 𝑎𝑖𝑗 de una matriz 𝐴, de orden n, que denotaremos por 𝑐𝑖𝑗, está
definido como:
𝑐𝑖𝑗 = (−1)𝑖+𝑗|𝑀𝑖𝑗|

164
De esta manera, la regla que nos permite asociar a cada menor el cofactor correspondiente. Se puede observar en el cuadro siguiente, donde hemos representado el valor del signo del menor que corresponde a la posición de la línea 𝑖 y columna 𝑗
||
+ − + − …− + − + …+ − + − …− + − + …… … … … …
||
Remplazamos los elementos 𝑎𝑖𝑗 de una matriz, por ejemplo 𝐴, por sus cofactores, se
obtiene la matriz de cofactores de 𝐴, que se expresa por 𝑐𝑜𝑓(𝐴).
Dada la matriz 𝐴 = [ 2 3 5−1 6 −4 2 0 3
], los menores de la matriz son, aprovechando los
cálculos anteriores y si multiplicamos cada menor por el factor (−1)𝑖+𝑗, tenemos
𝑐𝑜𝑓(𝐴) =
[ (−1)1+1 |
6 −40 3
| (−1)1+2 |−1 −4 2 3
| (−1)1+3 |−1 6 2 0
|
(−1)2+1 |3 50 3
| (−1)2+2 | 2 5 2 3
| (−1)2+3 | 2 3 2 0
|
(−1)3+1 |3 56 −4
| (−1)3+2 | 2 5−1 −4
| (−1)3+3 | 2 3−1 6
|]
= [18 −5 −12
−9 −4 6
−42 3 15
]
Para encontrar el determinante de A por el método de cofactores se necesita:
a) Elegir un reglón o una columna en la matriz. No importa que renglón o columna elija el resultado será siempre el mismo. Así algunas son más apropiadas que otras y simplifican los cálculos; por ejemplo, la que tienen elementos con valor cero.
b) Multiplicar los menores del renglón o columna por su cofactor respectivo y sumar sus resultados. Este último valor es el determinante de la matriz.
Ejemplo, dada la matriz 𝐴 = [1 3 24 1 32 5 2
] para encontrar el determinante por el método
de cofactores, elegimos por ejemplo el renglón 1.
|𝐴| = (1)(−1)1+1 |1 35 2
| + (3)(−1)1+2 |4 32 2
| + (2)(−1)1+3 |4 12 5
|
= (2 − 15) − 3(8 − 6) + 2(20 − 2) = −13 − 6 + 36 = 17
El determinante de esta matriz es 17.
No importa qué fila o columna selecciona; sin embargo, se recomienda elegir el renglón o columna con el mayor número de elementos igual a cero. Si utilizamos el método de cofactores se reduce el número de cálculos, ya que los cofactores con elemento cero no se requieren calcular.

165
Propiedades de los determinantes.
a) El determinante de una matriz A es igual al determinante de su traspuesta,
|A| = |At| b) Si intercambiamos dos renglones o dos columnas de una matriz cuadrada, su
determinante cambia de signo, aunque son iguales en valor absoluto. Por ejemplo;
|1 3 24 1 32 5 2
| = 17 |4 1 31 3 22 5 2
| = 24 + 4 + 15 − 18 − 40 − 2 = −17
c) Si multiplicamos todos los elementos de un renglón o columna de una matriz cuadrada por un número 𝑘, su determinante queda multiplicado por dicho número.
|1 3 24 1 32 5 2
| = 17 𝑟𝑒𝑛𝑔𝑙ó𝑛 1 𝑝𝑜𝑟 3 |3 9 64 1 32 5 2
|
= 6 + 54 + 120 − 12 − 45 − 72 = 51 = 3 ∗ 17
d) El determinante del producto de dos matrices cuadradas del mismo orden es igual al producto de los determinantes de dichas matrices: |𝐴 × 𝐵| = |𝐴| × |𝐵|.
𝐴 = [1 35 2
] 𝐵 = [4 32 2
] 𝐴 × 𝐵 = [10 924 19
] |𝐴 × 𝐵| = 190 − 216 = −26
|𝐴| = 2 − 15 = −13 |𝐵| = 8 − 6 = 2 |𝐴||𝐵| = −13 ∗ 2
= −26
e) Si una matriz cuadrada tiene un renglón o columna de ceros, el determinante es cero. Si evaluamos este determinante por el método de cofactores evidentemente su determinante será igual a cero.
𝐴 = [1 3 24 1 30 0 0
] |𝐴| = (0) |3 21 3
| − (0) |1 24 3
| + (0) |1 34 1
| = 0
f) Si una matriz cuadrada tiene dos renglones iguales o proporcionales, su determinante es cero.
𝐴 = [1 3 24 1 32 6 4
] |𝐴| = (2) |3 21 3
| − (6) |1 24 3
| + (4) |1 34 1
|
= 2(7) − 6(−5) + 4(−11) = 0
g) Si un renglón de una matriz se le suma otro renglón, multiplicado por un número, el valor del determinante no se modifica. Esta regla es de mucha utilidad ya que ahorra los cálculos de los cofactores y así resolver fácilmente determinantes de orden mayor que 3. Por ejemplo,

166
|
1 3 5 81 2 1 03 6 −2 44 1 2 6
|
𝑟1𝑟2𝑟3𝑟4
→ |
1 3 5 81 2 1 03 6 −2 44 1 2 6
|
𝑟1 𝑟2𝑎 = −𝑟1 + 𝑟2 𝑟3𝑎 = −3𝑟1 + 𝑟3𝑟4𝑎 = −4𝑟1 + 𝑟4
→ |
1 3 5 80 −1 −4 −80 −3 −17 −200 −11 −18 −26
|
Se resuelve el determinante por el método de cofactores, a partir de la columna 1.
|
1 3 5 80 −1 −4 −80 −3 −17 −200 −11 −18 −26
| el determinante del primer cofactor |−1 −4 −8−3 −17 −20−11 −18 −26
|
= −442 − 880 − 432 + 1496 + 360 + 312 = 414
Así, la mejor forma de calcular un determinante es hacer ceros un renglón o columna, para reducir el número de cofactores y los cálculos
h) El determinante de una matriz triangular es igual al producto de los elementos de la diagonal principal. Continuamos el ejercicio anterior
|
1 3 5 80 −1 −4 −80 −3 −17 −200 −11 −18 −26
|
𝑟1 𝑟2𝑎 𝑟3𝑏 = −3𝑟2 + 𝑟3𝑎
𝑟4𝑎 = −11𝑟2 + 𝑟4𝑎
→ |
1 3 5 80 −1 −4 −80 0 −5 40 0 26 62
|
𝑟1 𝑟2𝑎 𝑟3𝑏 = −3𝑟2 + 𝑟3𝑎
𝑟4𝑎 = −11𝑟2 + 𝑟4𝑎
→ ||
1 3 5 80 −1 −4 −80 0 −5 4
0 0 0414
5
|| = (1)(−1)(−5) (
414
5) = 414
i) Si A tiene matriz inversa, 𝐴−1 , se puede comprobar que,
det(𝐴−1) =1
det(𝐴)
3.5.7 Regla de Cramer
Es un procedimiento específico para la solución de sistemas de ecuaciones lineales simultáneas por medio de determinantes. Se aplica a sistemas que cumplan con las siguientes condiciones:
a) El determinante de la matriz de coeficientes es diferente de cero y, por consiguiente.
b) El número de ecuaciones es igual al número de incógnitas.

167
Dado un sistema de ecuaciones,
𝑎11𝑥1 + 𝑎12𝑥2 + 𝑎13𝑥3 + ⋯ . .+ 𝑎1𝑛𝑥𝑛 = 𝑏1 𝑎21𝑥1 + 𝑎22𝑥2 + 𝑎23𝑥3 + ⋯ . . + 𝑎2𝑛𝑥𝑛 = 𝑏2 …… …… 𝑎𝑚1𝑥1 + 𝑎𝑚2𝑥2 + 𝑎𝑚3𝑥3 + ⋯ . .+ 𝑎𝑚𝑛𝑥𝑛 = 𝑏𝑚
Al rescribir este sistema en forma matricial tendremos:
𝑨𝑿 = 𝑩
𝐴 es la matriz de coeficientes 𝐴 =
[ 𝑎11 𝑎12 𝑎13 ………… 𝑎1𝑛
𝑎21 𝑎22 𝑎23 ………… 𝑎2𝑛
… . . . . … ………… …… . … … ……… . . …𝑎𝑚1 𝑎𝑚2 𝑎𝑚3 ………… 𝑎𝑚𝑛]
𝑋 son las variables
𝑋 =
[ 𝑥1
𝑥2
……𝑥𝑛]
𝐵 es el vector de términos independientes 𝐵 =
[ 𝑏1
𝑏2
……𝑏𝑛]
Para cada variable 𝑥𝑖 tendremos una matriz asociada que designaremos por 𝐴𝑖. Esta matriz se obtiene al sustituir en la matriz de coeficientes la columna 𝑖 por la matriz de los términos independientes.
𝐴1 =
[ 𝑏1 𝑎12 𝑎13 … 𝑎1𝑛
𝑏2 𝑎22 𝑎23 … 𝑎2𝑛
… . . . . … … …… . … … . . …𝑏𝑛 𝑎𝑚2 𝑎𝑚3 … 𝑎𝑚𝑛]
𝐴2 =
[ 𝑎11 𝑏1 𝑎13 … 𝑎1𝑛
𝑎21 𝑏2 𝑎23 … 𝑎2𝑛
… . . . . … … …… . … … . . …𝑎𝑚1 𝑏𝑛 𝑎𝑚3 … 𝑎𝑚𝑛]
………
El valor de cada variable 𝑥𝑖 se obtiene al dividir el determinante de la matriz asociada a la variable entre el determinante de la matriz de coeficientes 𝐴
𝑥𝑖 =|𝐴𝑖|
|𝐴| 𝑝𝑎𝑟𝑎 𝑖 = 1,2,3, … , 𝑛
Ejemplo, para el siguiente sistema de ecuaciones lineales:
𝑥1 + 2𝑥3 = 6 −3𝑥1 + 4𝑥2 + 6𝑥3 = 30 −𝑥1 − 2𝑥2 + 3𝑥3 = 8
Donde 𝐴 = [1 0 2
−3 4 6−1 −2 3
] |𝐴| = 44
𝐴1 = [ 6 0 230 4 6 8 −2 3
] |𝐴1| = −40 𝐴2 = [1 6 2
−3 30 6−1 8 3
] |𝐴2| = 72
𝐴3 = [1 0 6
−3 4 30−1 −2 8
] |𝐴3| = 152
Los valores de las variables 𝑥1, 𝑥2, 𝑥3 serían:
𝑥1 =−40
44= −
10
11 𝑥2 =
72
44=
18
11 𝑥3 =
152
44=
38
11
168
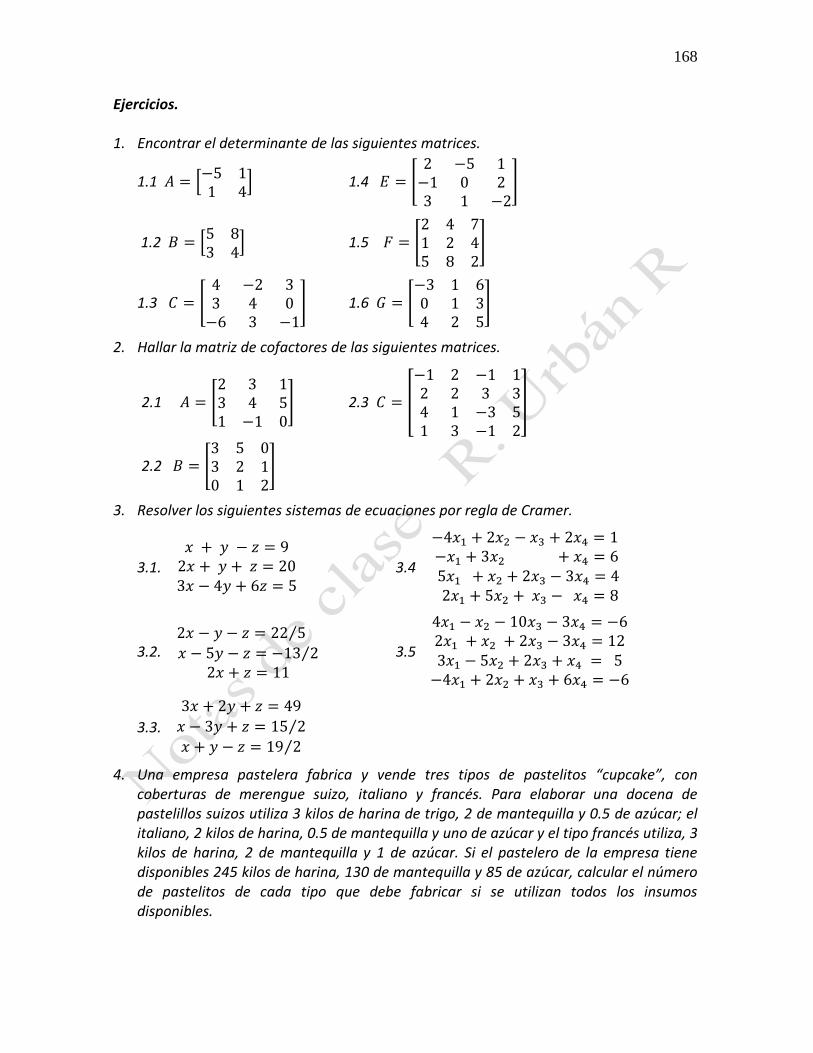
Ejercicios. 1. Encontrar el determinante de las siguientes matrices.
1.1 𝐴 = [−5 11 4
] 1.4 𝐸 = [2 −5 1
−1 0 23 1 −2
]
1.2 𝐵 = [5 83 4
] 1.5 𝐹 = [2 4 71 2 45 8 2
]
1.3 𝐶 = [4 −2 33 4 0
−6 3 −1] 1.6 𝐺 = [
−3 1 60 1 34 2 5
]
2. Hallar la matriz de cofactores de las siguientes matrices.
2.1 𝐴 = [2 3 13 4 51 −1 0
] 2.3 𝐶 = [
−1 2 −1 12 2 3 34 1 −3 51 3 −1 2
]
2.2 𝐵 = [3 5 03 2 10 1 2
]
3. Resolver los siguientes sistemas de ecuaciones por regla de Cramer.
3.1.
𝑥 + 𝑦 − 𝑧 = 92𝑥 + 𝑦 + 𝑧 = 203𝑥 − 4𝑦 + 6𝑧 = 5
3.4
−4𝑥1 + 2𝑥2 − 𝑥3 + 2𝑥4 = 1 −𝑥1 + 3𝑥2 + 𝑥4 = 6 5𝑥1 + 𝑥2 + 2𝑥3 − 3𝑥4 = 4 2𝑥1 + 5𝑥2 + 𝑥3 − 𝑥4 = 8
3.2. 2𝑥 − 𝑦 − 𝑧 = 22 5 ⁄
𝑥 − 5𝑦 − 𝑧 = −13 2⁄2𝑥 + 𝑧 = 11
3.5
4𝑥1 − 𝑥2 − 10𝑥3 − 3𝑥4 = −62𝑥1 + 𝑥2 + 2𝑥3 − 3𝑥4 = 123𝑥1 − 5𝑥2 + 2𝑥3 + 𝑥4 = 5
−4𝑥1 + 2𝑥2 + 𝑥3 + 6𝑥4 = −6
3.3.
3𝑥 + 2𝑦 + 𝑧 = 49
𝑥 − 3𝑦 + 𝑧 = 15 2⁄
𝑥 + 𝑦 − 𝑧 = 19 2⁄
4. Una empresa pastelera fabrica y vende tres tipos de pastelitos “cupcake”, con coberturas de merengue suizo, italiano y francés. Para elaborar una docena de pastelillos suizos utiliza 3 kilos de harina de trigo, 2 de mantequilla y 0.5 de azúcar; el italiano, 2 kilos de harina, 0.5 de mantequilla y uno de azúcar y el tipo francés utiliza, 3 kilos de harina, 2 de mantequilla y 1 de azúcar. Si el pastelero de la empresa tiene disponibles 245 kilos de harina, 130 de mantequilla y 85 de azúcar, calcular el número de pastelitos de cada tipo que debe fabricar si se utilizan todos los insumos disponibles.

169
5. Una empresa que fabrica discos de almacenamiento de ‘estado sólido’ SSD, de tres capacidades de 120G, 240G, 480G gigabytes. Para fabricar cada uno de estos componentes la empresa requiere; en el disco de 120G, 3 horas de ensamblado, 2 horas de prueba y una de empacado; para el disco de 240G, 5 horas de ensamblado, 3 de prueba y 2 de empacado; para el disco de 480G necesitarán, 6 horas de ensamblado, 3 horas de prueba y 2 de empacado. Si la capacidad de la empresa le permite destinar 1200 horas a ensamble, 680 a prueba y 450 al empacado al mes. ¿Cuántas piezas de cada tipo se pueden producir por mes si se utilizan todos los recursos disponibles?
3.5.8 Matriz Inversa
Dada una matriz cuadrada 𝐴 de orden 𝑚 × 𝑛 se dice que es regular (invertible) o que
tiene matriz inversa, si existe otra matriz del mismo orden llamada 𝐴−1 que verifica la multiplicación matricial
𝐴 × 𝐴−1 = 𝐼, donde I es la matriz identidad.
En otras palabras, si 𝐴 es una matriz cuadrada cualquiera y es posible hallar una matriz 𝐵
tal que 𝐴𝐵 = 𝐵𝐴 = 𝐼, entonces se dice que A es invertible y B se conoce como la inversa
de A. No todas las matrices cuadradas tienen inversa. Si A no tiene inversa, se dice que es
singular o no invertible.
Sea 𝐴 = [2 −5
−1 3] 𝑦 𝐵 = [
3 51 2
] 𝐴𝐵 = [2 −5
−1 3] [
3 51 2
] = [1 00 1
]
También 𝐵𝐴 = [3 51 2
] [2 −5
−1 3] = [
1 00 1
]
Propiedades
a) La matriz inversa de una matriz, si existe, es única. b) (𝐴−1)−1 = 𝐴 c) (𝐴𝑇)−1 = (𝐴−1)𝑇 el inverso de la transpuesta es la transpuesta de su inversa d) (𝑡 × 𝐴)−1 = 𝑡−1 × 𝐴−1, t es un número real distinto de cero e) (𝐴𝐵)−1 = 𝐵−1𝐴−1
Como hemos visto antes, un sistema de ecuaciones se puede escribir como 𝐴𝑋 = 𝐵. La solución a este sistema es despejar la matriz columna 𝑋. Multiplicamos ambos lados de la ecuación por la matriz inversa,

170
(𝐴−1𝐴)𝑋 = 𝐴−1𝐵
Por definición de la inversa nos queda 𝐼𝑋 = 𝐴−1𝐵 finalmente obtenemos,
𝑋 = 𝐴−1𝐵 Que nos permitirá resolver el sistema de ecuaciones. El cálculo de la matriz inversa no es un proceso sencillo. Primero, veremos el método directo, después el de Gauss y, por último, un tercer método basado en determinantes. 3.5.8.1 Método directo. Este método consiste en encontrar la matriz inversa 𝐴−1, a partir de un sistema de ecuaciones. Partimos de la propiedad establecida antes de que si 𝐴 × 𝐵 = 𝐼 entonces B es la matriz inversa de A.
Dada la matriz 𝐴 = [2 −5
−1 3] para encontrar su inversa, establecemos el siguiente
sistema de ecuaciones.
𝐴 × 𝐵 = 𝐼 [2 −5
−1 3] × [
𝑥1 𝑥2
𝑥3 𝑥4] = [
1 00 1
]
Donde la matriz 𝐵 = [𝑥1 𝑥2
𝑥3 𝑥4] si existe es la matriz inversa de A.
De esta manera tenemos las siguientes ecuaciones simultáneas:
𝑎) 2𝑥1 − 5𝑥3 = 1𝑏) 2𝑥2 − 5𝑥4 = 0𝑐) −𝑥1 + 3𝑥3 = 0𝑑) −𝑥2 + 3𝑥4 = 1
Se resuelve el sistema de ecuaciones por sustitución. Despejar 𝑥1 y 𝑥2 de las dos
últimas ecuaciones, 𝑐) y 𝑑)
𝑥1 = 3𝑥3 𝑦 𝑥2 = 3𝑥4 − 1
Sustituir en las dos primeras ecuaciones, 𝑎) y 𝑑)
2(3𝑥3) − 5𝑥3 = 1 → 𝑥3 = 1
2(3𝑥4 − 1) − 5𝑥4 = 0 → 𝑥4 = 2
Finalmente se sustituyen 𝑥1, 𝑥2, 𝑥3, 𝑥4 en la matriz B,
𝐵 = [3 51 2
] Que es la inversa de A, ya que [ 2 −5−1 3
] × [3 51 2
] = [1 00 1
]
Que es lo que queríamos encontrar. En forma general, para obtener la matriz inversa de una matriz cuadrada de orden 2,

171
𝐴 = [𝑎11 𝑎12
𝑎21 𝑎22]
𝐴−1 =[
𝑎22 −𝑎12
−𝑎21 𝑎11]
|𝐴|=
[𝑎22 −𝑎12
−𝑎21 𝑎11]
𝑎11𝑎22 − 𝑎12𝑎21
El método directo es útil para matrices cuadradas del orden 2 𝑥 2. En sistemas mayores el cálculo se complica y conviene utilizar otros métodos. Ejemplo, Una empresa financiera invierte 1,200,000 pesos en dos instrumentos de inversión. El primer grupo le otorga el 6.5% de interés anual y el segundo 7.5%. Los inversionistas esperan que estas inversiones debieran ser equivalentes a invertir todo el dinero en un tercer instrumento que le otorga el 7% de interés. ¿Cuál es la cantidad invertida a cada tasa de interés? La solución parte de escribir el sistema de ecuaciones, donde 𝑥`𝑠 es la cantidad invertida en el primer instrumento de inversión y será 𝑦`𝑠 la cantidad invertida en el segundo grupo. El sistema que tendremos que resolver sería el siguiente,
𝑥 + 𝑦 = 1,200,0000.065𝑥 + 0.075𝑦 = 0.07(1,200,000)
Que en forma matricial lo podemos rescribir,
[1 1
. 065 . 075] [
𝑥𝑦] = [
1,200,00084000
]
Al despejar nos queda
[𝑥𝑦] = [
1 1. 065 . 075
]−1
[1,200,000
84000] =
[. 075 −1−.065 1
]
(1)(. 075) − (1)(. 065)[1,200,000
84000]
Finalmente, las cantidades que deberemos invertir en cada grupo son,
[𝑥𝑦] = [
7.5 −100−6.5 100
] [1,200,000
84000] = [
600000600000
]
3.5.8.2 Cálculo de la matriz inversa por el método de Gauss - Jordan.
El cálculo de la matriz inversa por el método de Gauss – Jordan supone transformar una matriz en otra equivalente por filas. En esencia, el método propone, para una matriz cuadrada de orden 𝑚 × 𝑛,

172
1. Crear una matriz aumentada de orden 𝑚 × 2𝑛 de manera que las primeras
columnas sean las de la matriz A y las siguientes 𝑛 las de la matriz identidad, de orden n.
2. Mediante transformaciones elementales de las filas de una matriz, convertir la matriz anterior en otra que tenga en las 𝑛 primeras columnas la matriz identidad y en las 𝑛 últimas otra matriz que precisamente será 𝐴−1.
El método consiste, pues, en colocar juntas la matriz a invertir, y la matriz identidad.
Por medio de transformaciones elementales, vamos modificando nuestra matriz hasta obtener la matriz identidad. Cada paso que apliquemos a la matriz se lo aplicaremos a la matriz identidad. Cuando hayamos obtenido la matriz identidad, la de la derecha será la inversa. Si no podemos llegar a la matriz identidad (por ejemplo, sale alguna fila de ceros), significa que la matriz no será invertible. Las transformaciones elementales son las siguientes: substituir una fila o columna de la matriz por ella misma multiplicada (o dividida) por un número, substituir una fila o columna de la matriz por una combinación lineal de filas o columnas de la matriz (si es fila, filas, y si es columna, columnas), e intercambiar filas o columnas. Ejemplo: Encontrar la inversa de la siguiente matriz:
𝐴 = [1 2 32 5 31 0 8
] Vamos a modificar nuestra matriz haciendo operaciones entre renglones, hasta obtener del lado izquierdo la matriz identidad,
Iniciamos el método de Gauss.
[1 2 3 𝟏 𝟎 𝟎2 5 3 𝟎 𝟏 𝟎1 0 8 𝟎 𝟎 𝟏
]
𝑟1𝑟2𝑟3
⟹ [1 2 3 𝟏 𝟎 𝟎0 −1 3 𝟐 −𝟏 𝟎0 −2 5 −𝟏 𝟎 𝟏
]
𝑟1 𝑟2𝑏 = 2𝑟1 − 𝑟2𝑟3𝑏 = 𝑟3 − 𝑟1
[1 2 3 𝟏 𝟎 𝟎0 1 −3 −𝟐 𝟏 𝟎0 −2 5 −𝟏 𝟎 𝟏
]
𝑟1 𝑟2𝑐 = −𝑟2𝑏
𝑟3𝑏 ⟹ [
1 2 3 𝟏 𝟎 𝟎0 1 −3 −𝟐 𝟏 𝟎0 0 −1 −𝟓 𝟐 𝟏
]
𝑟1 𝑟2𝑐 𝑟3𝑐 = 2𝑟2𝑐 + 𝑟3𝑏
[1 2 3 𝟏 𝟎 𝟎0 1 −3 −𝟐 𝟏 𝟎0 0 1 𝟓 −𝟐 −𝟏
]
𝑟1 𝑟2𝑐 𝑟3𝑑 = −𝑟3𝑐
⟹ [1 2 0 𝟏𝟒 𝟔 𝟑0 1 0 𝟏𝟑 −𝟓 −𝟑0 0 1 𝟓 −𝟐 −𝟏
]𝑟1𝑎 = 𝑟1 − 3𝑟3𝑑 𝑟2𝑑 = 𝑟2𝑐 + 3𝑟3𝑑
𝑟3𝑑

173
[1 0 0 −𝟒𝟎 𝟏𝟔 𝟗0 1 0 𝟏𝟑 −𝟓 −𝟑0 0 1 𝟓 −𝟐 −𝟏
]𝑟1𝑏 = 𝑟1𝑎 − 2𝑟2𝑑
𝑟2𝑐 𝑟3𝑑
Finalmente, la matriz inversa es:
𝐴−1 = [
−𝟒𝟎 𝟏𝟔 𝟗 𝟏𝟑 −𝟓 −𝟑 𝟓 −𝟐 −𝟏
]
Ejemplo: Obtener por el método de Gauss-Jordan la matriz inversa de 𝐴 = [1 3 72 5 42 6 14
]
[1 3 7 𝟏 𝟎 𝟎2 5 4 𝟎 𝟏 𝟎2 6 14 𝟎 𝟎 𝟏
]
𝑟1𝑟2𝑟3
⟹ [1 3 7 𝟏 𝟎 𝟎0 −1 −10 −𝟐 𝟏 𝟎0 0 0 −𝟐 𝟎 𝟏
]
𝑟1 𝑟2𝑏 = 𝑟2 − 2𝑟1𝑟3𝑏 = 𝑟3 − 2𝑟1
Como obtenemos un renglón de ceros, la matriz 𝐴 no tiene inversa.
3.5.8.3 Cálculo de la matriz inversa por medio de la matriz adjunta El conocimiento de los determinantes y su relación con las matrices cuadradas nos permite obtener la matriz inversa de la siguiente manera,
𝐴−1 =𝐴𝑑𝑗(𝐴)
|𝐴|
Donde 𝐴𝑑𝑗(𝐴) se llama matriz adjunta de A. Esta resulta de obtener la transpuesta de la matriz de cofactores. Es decir 𝐴𝑑𝑗(𝐴) = (𝑐𝑜𝑓(𝐴))𝑇.
Ejemplo. Encontrar si es posible la inversa de la matriz 𝐴 = [1 −2 35 −1 23 4 −3
]
En primer lugar, calculamos el determinante de la matriz A,
|𝐴| = |1 −2 35 −1 23 4 −3
| = 1(3 − 8) + 2(−15 − 6) + 3(20 + 3) = 22
Como el determinante es diferente de cero, la matriz 𝐴 tiene inversa. Ahora calculamos los cofactores de la matriz.
534
21)1( 11
11 −=
−
−−= +A 21
33
25)1( 21
12 =
−−= +A 23
43
15)1( 31
13 =
−−= +A

174
634
32)1( 12
21 =
−
−−= +A 12
33
31)1( 22
22 −=
−−= +A 10
43
21)1( 32
23 −=
−−= +A
121
32)1( 13
31 −=
−
−−= +A 13
25
31)1( 23
32 =
−= +A 9
15
21)1( 33
33 =
−
−−= +A
Y la matriz adjunta de A;
−
−−
−
=
9131
10126
23215
)(ACof 𝐴𝑑𝑗(𝐴) = (𝑐𝑜𝑓(𝐴))𝑇
−
−
−−
=
91023
131221
165
Finalmente, la matriz inversa es;
𝐴−1 =𝐴𝑑𝑗(𝐴)
|𝐴|=
1
22[−5 6 −121 −12 1323 −10 9
]
Ejercicios
1. Encontrar la matriz inversa por el método directo.
1.1. 𝐴 = [5 −23 5
]
1.2. 𝐵 = [−3 −2−1 5
]
2. Encontrar por el método de Gauss-Jordan la inversa de las siguientes matrices
2.1. 𝐶 = [4 3 71 2 42 0 3
] 2.3 𝐸 = [1 3 21 1 04 2 −1
]
2.2. 𝐷 = [1 −2 33 −2 12 −1 0
] 2.4 𝐹 = [
−1 0 −2 1 2 0 4 0 0 −1 −1 2−2 3 −2 1
]
3. Encontrar la matriz inversa de los siguientes ejercicios por el método de la adjunta.
3.1 𝐴 = [−1 3 20 1 42 1 −3
]
3.2 𝐵 = [4 1 21 7 42 −5 3
]
3.3 𝐶 = [
4 0 1 24 1 3 91 −1 7 4
−2 2 −5 3
]

175
3.6 Modelos Input-Output (I-O) ¿Qué es un modelo input-output? El análisis económico I-O es un método para cuantificar de forma sistemática las relaciones entre los distintos sectores de un sistema económico. El sistema económico puede ser tan grande como una nación o incluso toda la economía mundial, o tan pequeño como la economía de un área metropolitana (Leontief, 1985a). El modelo de I-O es una formalización de los conceptos básicos publicado en 1758, por el economista francés François Quesnay, en su “Economique Tableau". Más de 100 años después del trabajo de Quesnay, León Walras desarrolló una teoría de equilibrio general que utiliza un conjunto de coeficientes relacionados con la producción que las cantidades de los factores necesarios para producir una unidad de producto en particular a los niveles de la producción total de ese producto. El enfoque de análisis económico I-O es el siguiente. La estructura del proceso de producción de cada industria está representada por el vector columna de coeficientes que indica la relación entre los insumos que absorbe y por renglón la salida que produce. La interdependencia entre los sectores de la economía está definida por “un conjunto de ecuaciones lineales que expresan el equilibrio entre la entrada total y la producción total de cada producto y servicio producidos y consumidos en el curso de uno o varios períodos de tiempo" (Leontief 1985a). Así, si la economía se divide en 𝑛 sectores, y si 𝑋𝑖 es la producción final del sector 𝑖; y 𝑌𝑖 la demanda final del sector 𝑖 (consumo), tenemos:
𝑋𝑖 = 𝑐𝑖1 + 𝑐𝑖2+. . . . . +𝑐𝑖𝑗 + 𝑐𝑖𝑛 + 𝑌𝑖
𝑃𝑎𝑟𝑎 𝑖 = 1… . . 𝑛 𝑦 𝑗 = 1… . . 𝑛 Los términos 𝑐𝑖𝑗 , a la derecha del signo igual, representan las relaciones interindustriales
del sector i al sector j. De esta manera, el lado derecho de la ecuación representa la oferta de la relación interindustrial. Las Xi, representan la producción total del sector i. El sistema de ecuaciones para n sectores sería entonces.
𝑋1 = 𝑐11 + 𝑐12+. . . . . +𝑐1𝑗 + 𝑐1𝑛 + 𝑌1
𝑋2 = 𝑐21 + 𝑐22+. . . . . +𝑐2𝑗 + 𝑐2𝑛 + 𝑌2
⋮ 𝑋𝑖 = 𝑐𝑖1 + 𝑐𝑖2+. . . . . +𝑐𝑖𝑗 + 𝑐𝑖𝑛 + 𝑌𝑖
𝑋𝑛 = 𝑐𝑛1 + 𝑐𝑛2+. . . . . +𝑐𝑛𝑗 + 𝑐𝑛𝑛 + 𝑌𝑛
La columna j ésima es el vector columna
[ 𝑐1𝑗
𝑐2𝑗
𝑐3𝑗
…𝑐𝑖𝑗
…𝑐𝑛𝑗]
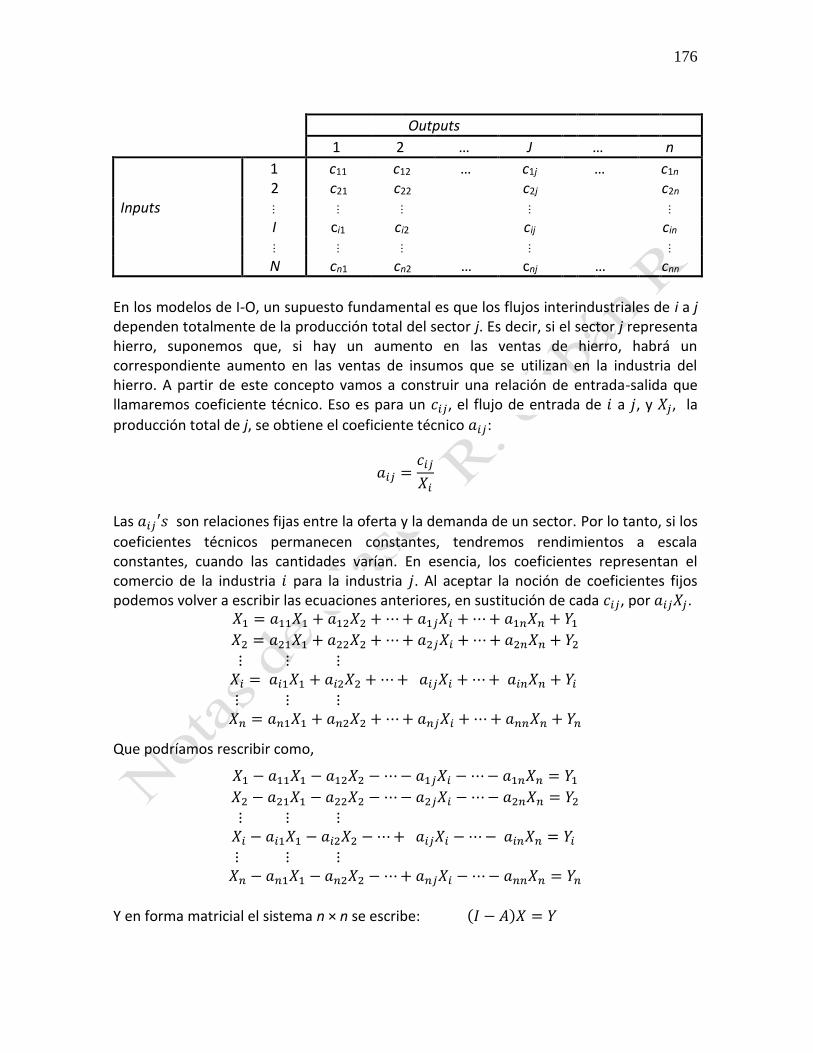
Estos elementos son los requerimientos o inputs del sector, columna j, representan las cantidades necesarias para la producción del sector 𝑗, output. En resumen, son las cantidades físicas que son introducidas al sector 𝑗.
176
Outputs
1 2 … J … n
1 c11 c12 … c1j … c1n 2 c21 c22 c2j c2n
Inputs I ci1 ci2 cij cin N cn1 cn2 … cnj … cnn
En los modelos de I-O, un supuesto fundamental es que los flujos interindustriales de i a j dependen totalmente de la producción total del sector j. Es decir, si el sector j representa hierro, suponemos que, si hay un aumento en las ventas de hierro, habrá un correspondiente aumento en las ventas de insumos que se utilizan en la industria del hierro. A partir de este concepto vamos a construir una relación de entrada-salida que llamaremos coeficiente técnico. Eso es para un 𝑐𝑖𝑗, el flujo de entrada de 𝑖 a 𝑗, y 𝑋𝑗, la
producción total de j, se obtiene el coeficiente técnico 𝑎𝑖𝑗:
𝑎𝑖𝑗 =𝑐𝑖𝑗
𝑋𝑖
Las 𝑎𝑖𝑗′𝑠 son relaciones fijas entre la oferta y la demanda de un sector. Por lo tanto, si los
coeficientes técnicos permanecen constantes, tendremos rendimientos a escala constantes, cuando las cantidades varían. En esencia, los coeficientes representan el comercio de la industria 𝑖 para la industria 𝑗. Al aceptar la noción de coeficientes fijos podemos volver a escribir las ecuaciones anteriores, en sustitución de cada 𝑐𝑖𝑗, por 𝑎𝑖𝑗𝑋𝑗.
𝑋1 = 𝑎11𝑋1 + 𝑎12𝑋2 + ⋯+ 𝑎1𝑗𝑋𝑖 + ⋯+ 𝑎1𝑛𝑋𝑛 + 𝑌1
𝑋2 = 𝑎21𝑋1 + 𝑎22𝑋2 + ⋯+ 𝑎2𝑗𝑋𝑖 + ⋯+ 𝑎2𝑛𝑋𝑛 + 𝑌2
⋮ ⋮ ⋮ 𝑋𝑖 = 𝑎𝑖1𝑋1 + 𝑎𝑖2𝑋2 + ⋯+ 𝑎𝑖𝑗𝑋𝑖 + ⋯+ 𝑎𝑖𝑛𝑋𝑛 + 𝑌𝑖
⋮ ⋮ ⋮ 𝑋𝑛 = 𝑎𝑛1𝑋1 + 𝑎𝑛2𝑋2 + ⋯+ 𝑎𝑛𝑗𝑋𝑖 + ⋯+ 𝑎𝑛𝑛𝑋𝑛 + 𝑌𝑛
Que podríamos rescribir como,
𝑋1 − 𝑎11𝑋1 − 𝑎12𝑋2 − ⋯− 𝑎1𝑗𝑋𝑖 − ⋯− 𝑎1𝑛𝑋𝑛 = 𝑌1
𝑋2 − 𝑎21𝑋1 − 𝑎22𝑋2 − ⋯− 𝑎2𝑗𝑋𝑖 − ⋯− 𝑎2𝑛𝑋𝑛 = 𝑌2
⋮ ⋮ ⋮ 𝑋𝑖 − 𝑎𝑖1𝑋1 − 𝑎𝑖2𝑋2 − ⋯+ 𝑎𝑖𝑗𝑋𝑖 − ⋯− 𝑎𝑖𝑛𝑋𝑛 = 𝑌𝑖
⋮ ⋮ ⋮ 𝑋𝑛 − 𝑎𝑛1𝑋1 − 𝑎𝑛2𝑋2 − ⋯+ 𝑎𝑛𝑗𝑋𝑖 − ⋯− 𝑎𝑛𝑛𝑋𝑛 = 𝑌𝑛
Y en forma matricial el sistema n × n se escribe: (𝐼 − 𝐴)𝑋 = 𝑌

177
En el modelo input-output, una pregunta común que se plantea es: dado un nivel de demanda Yi's, ¿cuál sería la cantidad de salida de cada uno de los sectores que serían necesarios para abastecer esta demanda final? Los Yi's y los coeficientes técnicos 𝑎𝑖𝑗, son
datos del modelo, son conocidos, y se obtienen al despejar las salidas de cada sector 𝑋𝑗′𝑠.
De esta forma tendremos las siguientes matrices:
, , La matriz A es la llamada matriz de coeficientes técnicos, o también input-output. Si el determinante |𝐼 − 𝐴| ≠ 0, entonces (𝐼 − 𝐴)−1 tiene solución única dada por la ecuación:
𝑋 = (𝐼 − 𝐴)−1𝑌
Donde (𝐼 − 𝐴)−1 es la Matriz Inversa de Leontief Un problema económico inmediato que se nos presenta es que los valores del vector de 𝑋 deben de ser todos positivos para que tenga sentido económico. Sabemos, por su naturaleza económica que tanto la demanda final (𝑌𝑖), como los coeficientes de 𝐴 son necesariamente positivos, no así para la matriz inversa de Leontief, que pudiera ser tener componentes negativos. Para asegurar obtener solo valores positivos, se requiere que el sistema económico permita que al menos una de las mercancías supere las necesidades de remplazamiento del proceso productivo. Si un sistema económico no pudiera siquiera producir las entradas que requiere no podría subsistir. 3.6.1 Modelo Leontieff8 El modelo insumo-producto se debe principalmente al economista W. Leontieff. Adopta el trabajo de Quesnay para construir su matriz de Insumo-Producto. Como explicamos antes, una industria a menudo utiliza entradas, o insumos, que son producidos por otras industrias. A su vez, la producción de esta industria puede servir como insumo para otras ramas económicas. Considere el caso la agricultura, que produce los insumos alimenticios de los obreros que trabajan en una empresa, por ejemplo, de trasformación. A su vez, estas empresas de trasformación elaboran por ejemplo herramientas para la agricultura. De esta manera, el modelo de entrada-salida se puede
8 Wassily Leontief (1906-1999), nació en Rusia en San Pétersburg. En 1931 se incorpora a la Universidad de Harvard donde publica, “The Structure of American Economy 1919-1929”, Harvard University Press, Cambridge, 1941. Obtiene el premio Nobel de Economía en 1973.
=
nnnjnn
nj
nj
aaaa
aaaa
aaaa
A
21
222221
111211
X
X
X
X n
=
1
2
Y
Y
Y
Yn
=
1
2
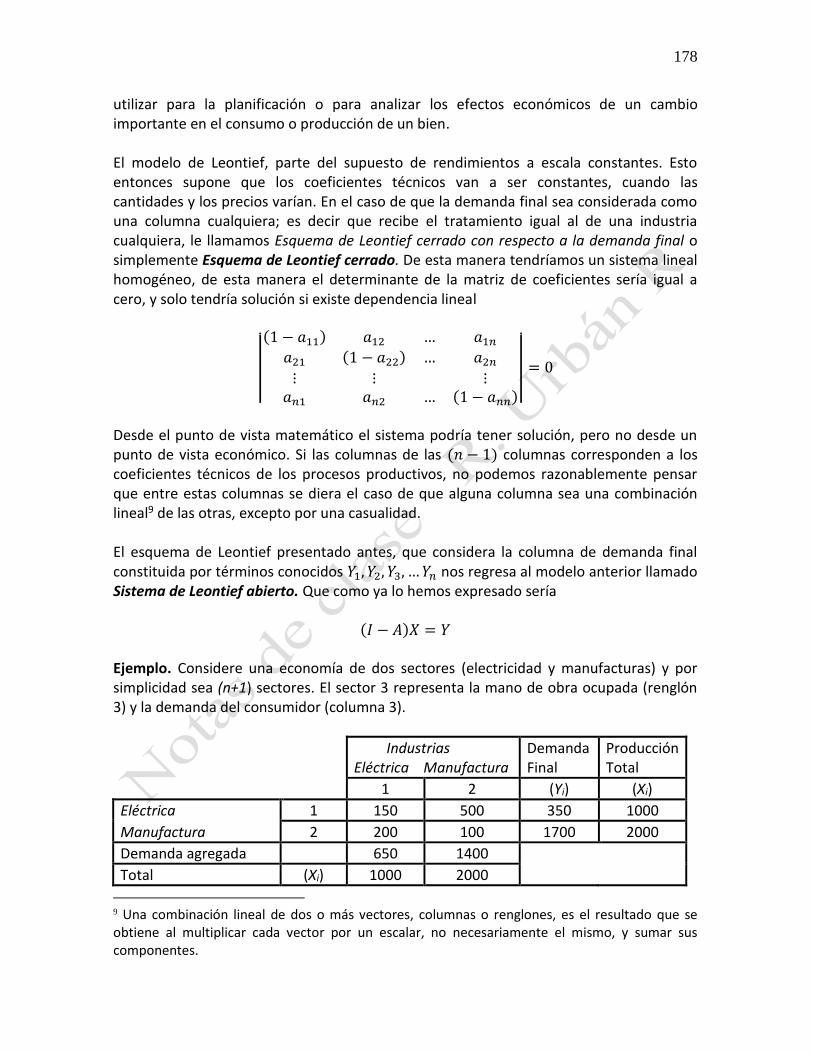
178
utilizar para la planificación o para analizar los efectos económicos de un cambio importante en el consumo o producción de un bien. El modelo de Leontief, parte del supuesto de rendimientos a escala constantes. Esto entonces supone que los coeficientes técnicos van a ser constantes, cuando las cantidades y los precios varían. En el caso de que la demanda final sea considerada como una columna cualquiera; es decir que recibe el tratamiento igual al de una industria cualquiera, le llamamos Esquema de Leontief cerrado con respecto a la demanda final o simplemente Esquema de Leontief cerrado. De esta manera tendríamos un sistema lineal homogéneo, de esta manera el determinante de la matriz de coeficientes sería igual a cero, y solo tendría solución si existe dependencia lineal
||
(1 − 𝑎11) 𝑎12 … 𝑎1𝑛
𝑎21 (1 − 𝑎22) … 𝑎2𝑛
⋮ ⋮ ⋮𝑎𝑛1 𝑎𝑛2 … (1 − 𝑎𝑛𝑛)
|| = 0
Desde el punto de vista matemático el sistema podría tener solución, pero no desde un punto de vista económico. Si las columnas de las (𝑛 − 1) columnas corresponden a los coeficientes técnicos de los procesos productivos, no podemos razonablemente pensar que entre estas columnas se diera el caso de que alguna columna sea una combinación lineal9 de las otras, excepto por una casualidad. El esquema de Leontief presentado antes, que considera la columna de demanda final constituida por términos conocidos 𝑌1, 𝑌2, 𝑌3, …𝑌𝑛 nos regresa al modelo anterior llamado Sistema de Leontief abierto. Que como ya lo hemos expresado sería
(𝐼 − 𝐴)𝑋 = 𝑌 Ejemplo. Considere una economía de dos sectores (electricidad y manufacturas) y por simplicidad sea (n+1) sectores. El sector 3 representa la mano de obra ocupada (renglón 3) y la demanda del consumidor (columna 3).
Industrias Eléctrica Manufactura
Demanda Final
Producción Total
1 2 (Yi) (Xi)
Eléctrica 1 150 500 350 1000
Manufactura 2 200 100 1700 2000
Demanda agregada 650 1400
Total (Xi) 1000 2000
9 Una combinación lineal de dos o más vectores, columnas o renglones, es el resultado que se obtiene al multiplicar cada vector por un escalar, no necesariamente el mismo, y sumar sus componentes.
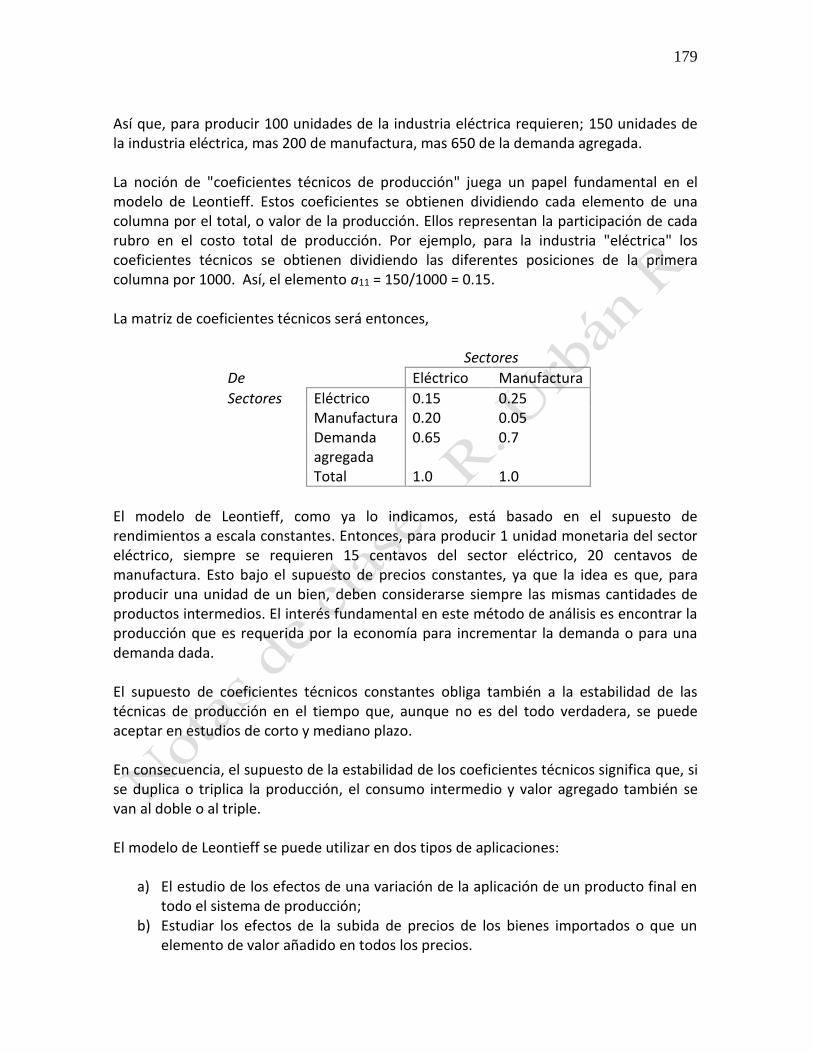
179
Así que, para producir 100 unidades de la industria eléctrica requieren; 150 unidades de la industria eléctrica, mas 200 de manufactura, mas 650 de la demanda agregada. La noción de "coeficientes técnicos de producción" juega un papel fundamental en el modelo de Leontieff. Estos coeficientes se obtienen dividiendo cada elemento de una columna por el total, o valor de la producción. Ellos representan la participación de cada rubro en el costo total de producción. Por ejemplo, para la industria "eléctrica" los coeficientes técnicos se obtienen dividiendo las diferentes posiciones de la primera columna por 1000. Así, el elemento a11 = 150/1000 = 0.15. La matriz de coeficientes técnicos será entonces,
Sectores
De Eléctrico Manufactura
Sectores Eléctrico 0.15 0.25 Manufactura 0.20 0.05 Demanda
agregada 0.65 0.7
Total 1.0 1.0
El modelo de Leontieff, como ya lo indicamos, está basado en el supuesto de rendimientos a escala constantes. Entonces, para producir 1 unidad monetaria del sector eléctrico, siempre se requieren 15 centavos del sector eléctrico, 20 centavos de manufactura. Esto bajo el supuesto de precios constantes, ya que la idea es que, para producir una unidad de un bien, deben considerarse siempre las mismas cantidades de productos intermedios. El interés fundamental en este método de análisis es encontrar la producción que es requerida por la economía para incrementar la demanda o para una demanda dada. El supuesto de coeficientes técnicos constantes obliga también a la estabilidad de las técnicas de producción en el tiempo que, aunque no es del todo verdadera, se puede aceptar en estudios de corto y mediano plazo. En consecuencia, el supuesto de la estabilidad de los coeficientes técnicos significa que, si se duplica o triplica la producción, el consumo intermedio y valor agregado también se van al doble o al triple. El modelo de Leontieff se puede utilizar en dos tipos de aplicaciones:
a) El estudio de los efectos de una variación de la aplicación de un producto final en todo el sistema de producción;
b) Estudiar los efectos de la subida de precios de los bienes importados o que un elemento de valor añadido en todos los precios.

180
Para estudiar el efecto de un aumento de la demanda final en el sistema de producción, supongamos, por ejemplo, para una demanda de $350 para el sector eléctrico y de $1700 para el sector manufacturero, que corresponde a los vectores.
𝑌 = [3501700
] 𝑦 𝑋 = [10002000
] Obtenidos de la tabla de datos que se muestra arriba,
En nuestro ejemplo si se incrementa la demanda a $400 para el sector eléctrico y se reduce para el sector manufacturas a $1600, tendremos los vectores.
𝑌 = [4001600
] 𝑦 ΔY = [50
−100]
Entonces usaremos la ecuación (𝐼 − 𝐴)−1𝑋 = 𝑌 para encontrar los nuevos niveles de producción.
(𝐼 − 𝐴) = [ 0.85 −0.25−0.20 0.95
] 𝑦 (𝐼 − 𝐴)−1 = [1.2541 0.330.2640 1.1221
]
La producción requerida es entonces:
Δ𝑋 = (𝐼 − 𝐴)−1 ∙ Δ𝑌 = [1.2541 0.330.2640 1.1221
] [50
−100] = [
29.7−99.0
]
Los valores ∆𝑥1 y ∆𝑥2 representan el impacto en la economía como un resultado de un cambio en la demanda cuando, ∆𝑦1 = $50 y ∆𝑦2 = −$100. Este cambio en la demanda dará como resultado un incremento en la actividad del sector 1 de $29.7 y un decremento en el sector 2 de $99.0.
De esta manera, con referencia a la matriz de coeficientes técnicos anterior, se requeriría (0.15)($400) = $60 del sector 1 y (0.2)($400) = $80 del sector 2 para producir una unidad del sector 1. Igualmente se demandarían (0.25)($1600) = $400 del sector 1 y (0.05)($1600) = $80 del sector 2 para producir los $1600 que se requieren. Supongamos un segundo ejemplo para tres sectores económicos de un país, con la siguiente tabla de insumo-producto.10
Actividades primarias
Actividades secundarias
Actividades terciarias
(Yi) (Xi)
Actividades primarias 67 389 0 306 762
Actividades secundarias 122 2,893 1001 9,339 13,355
Actividades terciarias 44 1,405 1673 9,070 12,192
Sub Total 233 4,687 2,674
Demanda agregada 529 8,668 9,518
10 Fuente. INEGI, Matriz de insumo-producto 2012 en miles de millones de pesos. Los datos involucrados en
los cálculos han sido redondeados

181
Total 762 13,355 12,192
La matriz de coeficientes técnicos es la siguiente,
Actividades primarias
Actividades secundarias
Actividades terciarias
Actividades primarias 0.09 0.029 0.000 Actividades secundarias 0.16 0.217 0.082 Actividades terciarias 0.06 0.105 0.137
Demanda agregada 0.69 0.649 0.781
Total 1 1 1
Para estudiar el efecto del aumento en la demanda final en el sistema de producción supongamos un incremento de 1,202 unidades en el sector de actividades secundarias, esto indica que la producción total del sector secundario pasa de 13,355 a 14557, un aumento del 9%. Bajo el supuesto del modelo de coeficientes técnicos constantes, entonces la industria aumentará su consumo intermedio y la demanda agregada en la misma proporción.
Actividades primarias
Actividades secundarias
Actividades terciarias
(𝑌𝑖) (𝑋𝑖)
Actividades primarias 424 Actividades secundarias 3,153 Actividades terciarias 1,532
Demanda agregada 9,448
Total 14,557
De la misma manera, para los otros sectores, por ejemplo, actividades primarias la producción final pasa de 762 a 797, el 4.6% de aumento, por el efecto del aumento del 9% en actividades primarias. De esta manera la tabla se actualiza.
Actividades primarias
Actividades secundarias
Actividades terciarias
(𝑌𝑖) (𝑋𝑖)
Actividades primarias 70 424
Actividades secundarias 128 3,153
Actividades terciarias 46 1,532
Demanda agregada 553 9,448
Total 797 14,557
Se inicia un proceso de incremento en todos los sectores debido al aumento del consumo intermedio. Si llamamos 𝑓1 al factor de aumento en actividades primarias, 𝑓2 a las secundarias y 𝑓3 a las actividades terciarias, tendremos el siguiente cuadro
Actividades Demanda Producción

182
Primarias Secundarias Terciarias Final (Yi) Total (Xi) Actividades primarias 67*𝑓1 389*𝑓2 306 762*𝑓1
Actividades secundarias 122*𝑓1 2,893*𝑓2 1,001*𝑓3 9,339+1,202 13,355*𝑓2
Actividades terciarias 44*𝑓1 1,405*𝑓2 1,673*𝑓3 9,070 12,192*𝑓3
Demanda agregada 529*𝑓1 8,668*𝑓2 9,518*𝑓3
Total 762*𝑓1 13,355*𝑓2 12,192*𝑓3
El total de cada renglón es igual a la producción. Así, obtenemos el siguiente sistema de ecuaciones.
67𝑓1 + 389𝑓2 + 306 = 762𝑓1 122𝑓1 + 2893𝑓2 + 1,001𝑓3 + 10,541 = 13,355𝑓2 44𝑓1 + 1,405𝑓2 + 1,673𝑓3 + 9,070 = 12,192𝑓3
Este sistema se puede resolver utilizando cálculo matricial y tendremos, en forma matricial. Primero rescribimos el sistema de ecuaciones,
(67 − 762)𝑓1 + 389𝑓2 = −306 122𝑓1 + (2893 − 13,355)𝑓2 + 1001𝑓3 = −10541
44𝑓1 + 1405𝑓2 + (1673−12192)𝑓3 = −9070
En forma matricial
[
𝑓1𝑓2𝑓3
] = [−695 389 0 122 −10462 1001 44 1405 −10519
]
−1
[−306
−10541−9070
]
Finalmente tenemos,
[−1.45 × 10−3 −5.46 × 10−5 −5.2 × 10−6
−1.77 × 10−5 −9.75 × 10−5 −9.27 × 10−6
−8.28 × 10−6 −1.32 × 10−5 −9.63 × 10−5
] [−306
−10541−9070
] = [1.06561.11721.0159
]
Un aumento del 9% en las actividades secundarias provoca un crecimiento del 6.56% en actividades primarias, de 11.7% en las actividades secundarias y de 1.59% en actividades terciarias. El crecimiento de las actividades secundarias fue entonces superior al 9% original porque ha sido necesario satisfacer la demanda de los otros sectores. El segundo tipo de aplicación del modelo de Leontieff nos sirve para medir el impacto de un aumento de los montos de alguno de los precios intermedios, por ejemplo, el salario Retomando nuestro ejemplo, suponiendo que incluimos los salarios y el excedente bruto de explotación, las cuentas de producción y explotación de diversas ramas, con el siguiente:
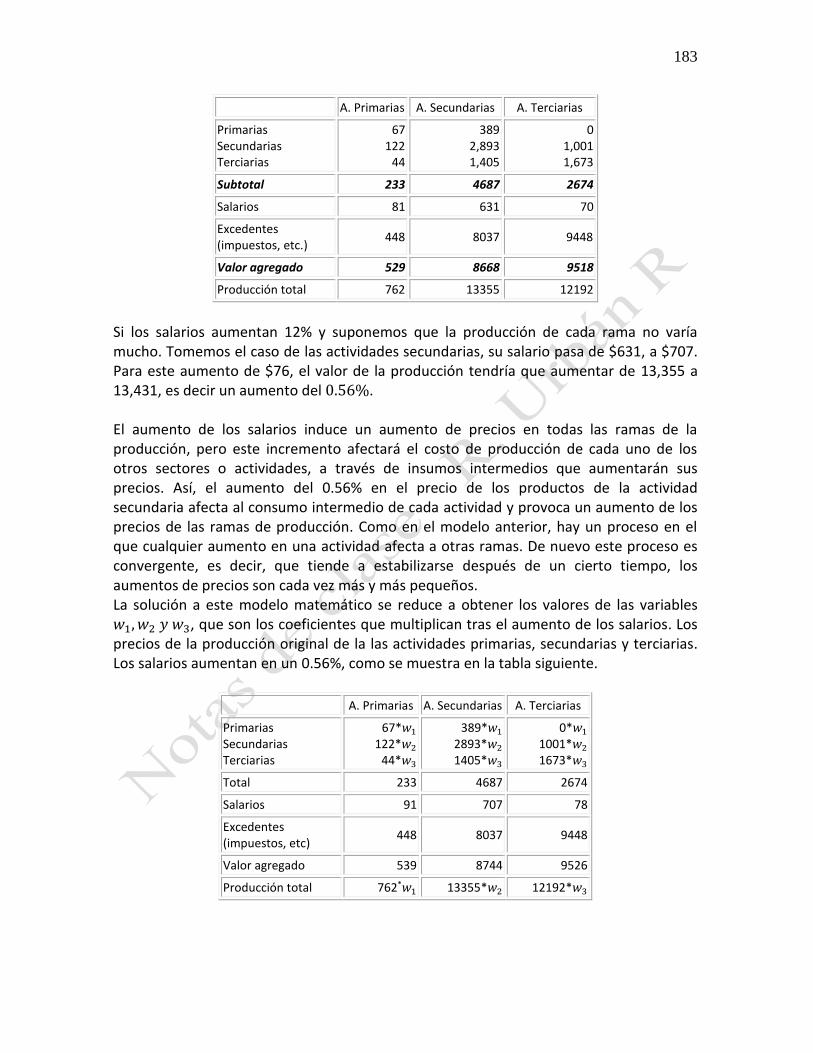
183
A. Primarias A. Secundarias A. Terciarias
Primarias Secundarias Terciarias
67 122
44
389 2,893 1,405
0 1,001 1,673
Subtotal 233 4687 2674
Salarios 81 631 70
Excedentes (impuestos, etc.)
448 8037 9448
Valor agregado 529 8668 9518
Producción total 762 13355 12192
Si los salarios aumentan 12% y suponemos que la producción de cada rama no varía mucho. Tomemos el caso de las actividades secundarias, su salario pasa de $631, a $707. Para este aumento de $76, el valor de la producción tendría que aumentar de 13,355 a 13,431, es decir un aumento del 0.56%. El aumento de los salarios induce un aumento de precios en todas las ramas de la producción, pero este incremento afectará el costo de producción de cada uno de los otros sectores o actividades, a través de insumos intermedios que aumentarán sus precios. Así, el aumento del 0.56% en el precio de los productos de la actividad secundaria afecta al consumo intermedio de cada actividad y provoca un aumento de los precios de las ramas de producción. Como en el modelo anterior, hay un proceso en el que cualquier aumento en una actividad afecta a otras ramas. De nuevo este proceso es convergente, es decir, que tiende a estabilizarse después de un cierto tiempo, los aumentos de precios son cada vez más y más pequeños. La solución a este modelo matemático se reduce a obtener los valores de las variables 𝑤1, 𝑤2 𝑦 𝑤3, que son los coeficientes que multiplican tras el aumento de los salarios. Los precios de la producción original de la las actividades primarias, secundarias y terciarias. Los salarios aumentan en un 0.56%, como se muestra en la tabla siguiente.
A. Primarias A. Secundarias A. Terciarias
Primarias Secundarias Terciarias
67*𝑤1 122*𝑤2
44*𝑤3
389*𝑤1 2893*𝑤2 1405*𝑤3
0*𝑤1 1001*𝑤2 1673*𝑤3
Total 233 4687 2674
Salarios 91 707 78
Excedentes (impuestos, etc)
448 8037 9448
Valor agregado 539 8744 9526
Producción total 762*𝑤1 13355*𝑤2 12192*𝑤3

184
A partir de los datos del cuadro anterior construimos el siguiente sistema de tres ecuaciones, se deben incluir la suma de los consumos intermedios, el valor agregado y la producción total.
67𝑤1 + 122𝑤2 + 44𝑤3 + 539 = 762𝑤1 389𝑤1 + 2893𝑤2 + 1405𝑤3 + 8744 = 13355𝑤2 0𝑤1 + 1001𝑤2 + 1673𝑤3 + 9526 = 12192𝑤3
Resolvemos igual que el ejercicio anterior,
[−1.454 × 10−3 −1.77 × 10−5 −8.34 × 10−6
−5.45 × 10−5 −9.75 × 10−5 −1.31 × 10−5
−5.15 × 10−6 −9.18 × 10−6 −9.54 × 10−5
] [−539−8744−9526
] = [1.01511.00670.992
]
La solución de este sistema es: 𝑤1 ≅ 1.015, 𝑤2 ≅ 1.0067 𝑦 𝑤2 ≅ 1 Por lo tanto, un aumento del 12% en los salarios provoca un aumento del 1.5% en las actividades primarias, 0.67% en las actividades secundarias y ningún efecto en las actividades terciarias. Este modelo es, por supuesto, muy simplificado, pero puede ser mejorado, si se cambian algunos supuestos básicos. Puede ser muy útil para medir, por ejemplo, el impacto mecánico de los precios del petróleo sobre los precios internos. También muestra cómo los aumentos de precios afectan de rama en rama, poniendo de relieve una vez más la interdependencia de todas las ramas de la economía nacional. Ejercicios
1. 1. Dadas las matrices 𝐴 = [1 2 3
−1 0 2] 𝑦 𝐵 = [
−1 5 −22 2 −1
]
1.1. Hallar 𝐴 + 𝐵,−2𝐵, 𝐴 − 𝐵, 𝐴 − 2𝐵, 𝐵 − 𝐴
1.2. Describir las vectores filas y las vectores columna de 𝐴 𝑦 𝐵
2. Calcule, si es posible, los productos matriciales 𝐴𝐵 y 𝐵𝐴
2.1. 𝐴 = [5 −2 3 10 −1 2 −13 1 0 −2
] ; 𝐵 = [
1 −1 33 −2 −1
−1 2 −31 −4 1
]
3. Dadas las siguientes matrices,

185
𝐴 = [ 3 1 −2 6 −4 5−5 −1 2
] 𝐵 = [ 2 −2 4−1 4 −5−1 7 1
] 𝐶 = [ 3 −1 2 1 1 −3−1 −5 6
]
3.1 Verifique que se cumple 𝐴𝐶 = 𝐴 𝑦 𝐶𝐴 = 𝐶
3.2 Determinar (𝐴 + 𝐴𝑇), 𝐵𝑇 , 𝐶𝑇 , (𝐵𝑇 + 𝐶𝑇)
3.3 Determinar (𝐴𝐵)𝑇 , 𝐴𝐶𝑇
3.4 Verifique que 𝐶𝐶𝑇 y 𝐶𝑇𝐶 son simétricas.
3.5 Determinar (𝐴𝐵𝐶)−1
4. Encontrar el determinante de las siguientes matrices.
4.1. 𝐴 = [−2 6−1 7
]
4.2 𝐵 = [3 1 22 3 −1
−5 2 −2]
4..3 𝐶 = [−5 3 02 −1 53 −2 6
]
5. Hallar la matriz de cofactores de las siguientes matrices.
5.1 𝐴 = [−2 0 56 1 34 2 5
]
5.2 𝐵 = [
−1 2 −1 12 2 3 34 1 −3 51 3 −1 2
]
6. Resolver los siguientes sistemas de ecuaciones por la regla de Cramer
6.1.
𝑥 − 3𝑦 + 3𝑧 = 11−6𝑥 + 5𝑦 + 𝑧 = 152𝑥 + 4𝑦 − 3𝑧 = −1
6.2.
𝑥1 + 4𝑥2 − 𝑥3 + 𝑥4 = 14 3𝑥1 + 2𝑥2 + 4𝑥3 + 𝑥4 = −5 2𝑥1 + 𝑥2 + 4𝑥3 = −14𝑥1 + 𝑥2 + 2𝑥3 + 4𝑥4 = 17
7. Una empresa elabora tres productos A, B y C. En una en un régimen de competencia perfecta. Las condiciones de equilibrio para el precio de los productos en el mercado se muestran el cuadro de oferta y demanda que se muestra a continuación.
𝑄𝑑𝐴=45−2𝑃1+𝑃2+𝑃3
𝑄𝑠𝐴=−22+3𝑃1+𝑃2+2𝑃3
𝑄𝑑𝐵=23+𝑃1−𝑃2+𝑃3
𝑄𝑠𝐵=−6+2𝑃2+3𝑃3
𝑄𝑑𝐶=37+2𝑃1+3𝑃2−2𝑃3
𝑄𝑠𝐶=−13+4𝑃1+2𝑃2+3𝑃3
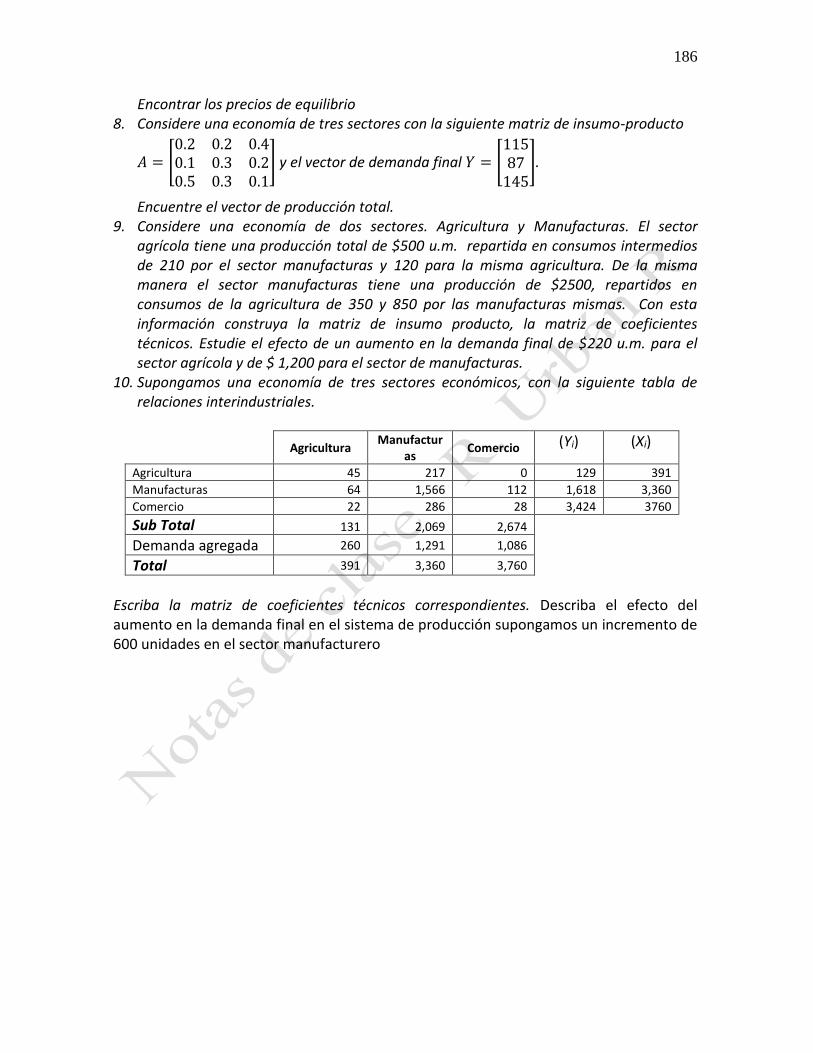
186
Encontrar los precios de equilibrio 8. Considere una economía de tres sectores con la siguiente matriz de insumo-producto
𝐴 = [0.2 0.2 0.40.1 0.3 0.20.5 0.3 0.1
] y el vector de demanda final 𝑌 = [11587145
].
Encuentre el vector de producción total. 9. Considere una economía de dos sectores. Agricultura y Manufacturas. El sector
agrícola tiene una producción total de $500 u.m. repartida en consumos intermedios de 210 por el sector manufacturas y 120 para la misma agricultura. De la misma manera el sector manufacturas tiene una producción de $2500, repartidos en consumos de la agricultura de 350 y 850 por las manufacturas mismas. Con esta información construya la matriz de insumo producto, la matriz de coeficientes técnicos. Estudie el efecto de un aumento en la demanda final de $220 u.m. para el sector agrícola y de $ 1,200 para el sector de manufacturas.
10. Supongamos una economía de tres sectores económicos, con la siguiente tabla de relaciones interindustriales.
Agricultura Manufactur
as Comercio (Yi) (Xi)
Agricultura 45 217 0 129 391
Manufacturas 64 1,566 112 1,618 3,360
Comercio 22 286 28 3,424 3760
Sub Total 131 2,069 2,674
Demanda agregada 260 1,291 1,086
Total 391 3,360 3,760
Escriba la matriz de coeficientes técnicos correspondientes. Describa el efecto del aumento en la demanda final en el sistema de producción supongamos un incremento de 600 unidades en el sector manufacturero