cap2 cinematica sem2011 - astro.ugto.mx mecanica/cap2_cinematica_sem201… · galileo (1564-1642) a...
TRANSCRIPT

1
Cinemática Descripción matemática del movimiento de una partícula (masa) en el espacio-tiempo
• El tiempo aparece con un parámetro que describe un cambio (cambio de posición) – no es un grado de libertad è no es una dimensión
Dos tipos de movimientos – translación y rotación (otro será vibración) En 1D – un grado de libertad – la posición es dada por vector ( )x t = trayectoria Desplazamiento = cambio de posición (2.1) 2 1x x x∆ = − Comparando con el tiempo t∆ que tomo para hacer el cambio:
Velocidad promedio
(2.2) 2 1
2 1x
x xxv
t t t−∆
= =∆ −
Geométricamente = el pendiente de la curva que pasa en los dos eventos ( )1 1x t
y ( )2 2x t
Asumiendo que el espacio-tiempo es continuo è se toma el límite cuando 0t∆ →
Velocidad instantánea
(2.3) 0
limx t
x dxv
t dt∆ →
∆= =
∆
Geométricamente = el pendiente de la tangente a la curva ( )1 1 1x t p=
La diferencial de un objeto matemático representa su tasa de variación instantánea relativa a otro parámetro (cualquier – frecuentemente el tiempo)

2
Podemos también aplicar el mismo principio a la velocidad misma:
Aceleración promedio
(2.4) 2 1
2 1x
v vva
t t t−∆
= =∆ −
Aceleración instantánea
(2.5) 2
20limx t
v dv d xa
t dt dt∆ →
∆= = =
∆
La diferencial secunda es la tasa de variación de una un otra tasa de variación:
2
2
d dx d xdt dt dt
=
Similarmente se podría considerar 2 3
3 3
d d x d xdt dt dt
=
que seria la tasa de variación de la
aceleración
• Un caso muy común en mecánica = 3 2
3 20 constantexd x d x
adt dt
= ⇒ = = è el
diagrama ( )v t es una reta; (la aceleración promedio = la aceleración instantánea)
• Similarmente 2
2 0 constanted x dx
vdt dt
= ⇒ = = , el diagrama de ( )x t es una reta (la
velocidad promedio = la velocidad instantánea) En general, si la aceleración no es constante el diagrama ( )x t describe una curva compleja

3
La ecuación de la cinemática – cuando aceleración = constante Aplicando las reglas del cálculo diferencial integral sobre el caso constantexa = , se
puede deducir una ecuación simple para la trayectoria del objeto ( )x t Usamos la técnica de separación de variable dv adt= y integrando una vez
(2.6) ( ) ( ) 0 00 0
0t t
tdv v t v t adt at at v v at= − = = = = ⇒ = +∫ ∫
Ahora usando el hecho que ( )0dx vdt v at dt= = + integrando otra vez
(2.7) ( ) 20 0 0 0
0
12
t
x x v at dt x x v t at− = + ⇒ = + +∫
Tenemos dos expresiones, combinando las, podemos eliminar la aceleración
( ) ( )0 0 0 0 0
1 1 12 2 2
x x v at t v v v t v v t − = + = + − = +
(2.8) ( ) ( )0 02 x x v v t− = + Tomando el cuadrado de la velocidad, podemos ahora eliminar el tiempo
2 2 2 2 2 2 20 0 0 0
12 2
2v v v at a t v v v t at a = + + ⇒ − = +
(2.9) ( )2 20 0 2v v x x a− = −
Ecuaciones de la cinemática con aceleración constante:
Trayectoria (parabólica) 20 0
12
x x v t at= + +
Velocidad instantánea (lineal) 0v v at= +
Relación sin incluir aceleración ( ) ( )0 02 x x v v t− = +
Relación sin incluir tiempo ( )2 20 0 2v v x x a− = −

4
Ejemplo importante de aceleración constante = fenómeno de la caída libre Galileo (1564-1642) a partir de experimentos demuestro que los objetos caen con aceleración constante, independiente de su masa
OBSERVACION: Aceleración constante ⇒ los cambios de velocidad son los mismos en iguales intervalos de tiempo Aceleración en la superficie de la tierra:
(2.10) 2
m9.8
sg =
Como la tierra no es una esfera homogénea, la aceleración en la superficie se maneja con solo dos cifras significativas Simplificación – también se desprecia el efecto del aire (depende en superficie del objeto y su velocidad) + rotación de la tierra (el efecto Coriollis) + disminución de la aceleración con la altitud y non homogeneidad ( g variable)
Newton (1642-1727) demuestro más tarde como determinar la aceleración de manera teórica (ley de gravitación) :
(2.11) 2Tierra
Tierra
Mg G
R=
Donde TierraM es la masa de la Tierra, y TierraR su radio; G es una constante de
proporcionalidad: 2 2 constante GM g
gR M R
∝ ⇒ = =
En la luna, por lo tanto, la misma masa tiene aceleración 2
m1.6
sLg = y en la superficie
del sol 2
m270
sSg =
NOTA: la masa (cantidad de materia) no cambia, pero su peso (la fuerza gravitacional) cambia
5
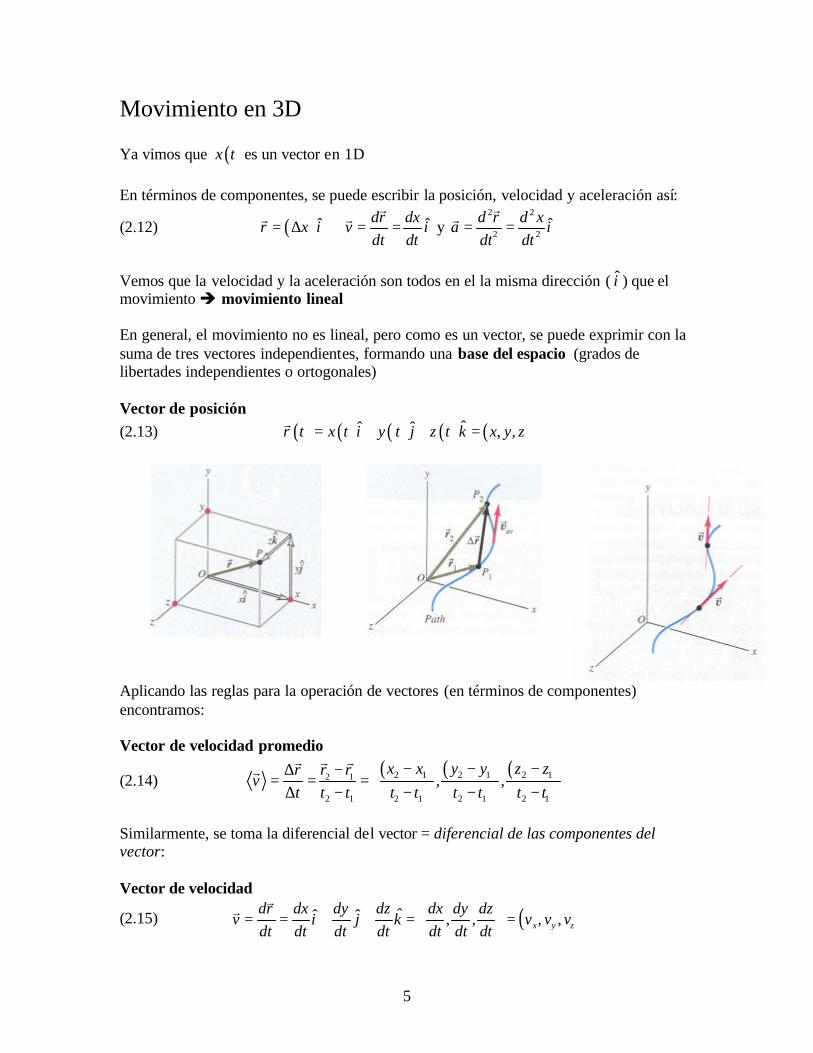
Movimiento en 3D Ya vimos que ( )x t es un vector en 1D En términos de componentes, se puede escribir la posición, velocidad y aceleración así:
(2.12) ( ) ˆ ˆdr dxr x i v i
dt dt= ∆ ⇒ = =
rr r y
2 2
2 2ˆd r d x
a idt dt
= =rr
Vemos que la velocidad y la aceleración son todos en el la misma dirección ( i ) que el movimiento è movimiento lineal En general, el movimiento no es lineal, pero como es un vector, se puede exprimir con la suma de tres vectores independientes, formando una base del espacio (grados de libertades independientes o ortogonales) Vector de posición (2.13) ( ) ( ) ( ) ( ) ( )ˆˆ ˆ , ,r t x t i y t j z t k x y z= + + =
r
Aplicando las reglas para la operación de vectores (en términos de componentes) encontramos: Vector de velocidad promedio
(2.14) ( ) ( ) ( )2 1 2 1 2 12 1
2 1 2 1 2 1 2 1
, ,x x y y z zr rr
vt t t t t t t t t
− − − −∆= = = ∆ − − − −
r rrr
Similarmente, se toma la diferencial del vector = diferencial de las componentes del vector: Vector de velocidad
(2.15) ( )ˆˆ ˆ , , , ,x y z
dr dx dy dz dx dy dzv i j k v v v
dt dt dt dt dt dt dt = = + + = =
rr

6
Y la velocidad instantánea = magnitud del vector de velocidad
(2.16) ( )1 22 2 2x y zv v v v v= = + +
r
En 2D, el desplazamiento se hace en un plano Ej. en x-y
( )1 22 2x yv v v= +
Donde podemos sacar el ángulo entre la tangente a la trayectoria (dirección del vector de velocidad)
(2.17) tan y
x
v
vα =
Similarmente, para la aceleración, tenemos Vector de aceleración promedio
(2.18) 2 1
2 1
v va
t t−
=−
r rr
Vector de aceleración
(2.19) ( )2 2 2 2
2 2 2 2ˆˆ ˆ , ,x y z
d r d x d y d za i j k a a a
dt dt dt dt= = + + =
rr

7
A la diferencia de el moviendo lineal (1D) la aceleración en 3D no es obligatoriamente en la dirección de la velocidad – aunque la magnitud de la velocidad puede ser constante, su dirección puede cambiar Separamos la aceleración en dos partes: componente paralelo y otra perpendicular
Por lo tanto tenemos dos tipos de diferenciales:
• ˆd v dva T
dt dt= = P
r = la tasa de cambio de la velocidad, donde T es un vector
unitario sobre la tangente a la trayectoria; la cual es cero si la velocidad es constante
• ˆ ˆdva a T a N
dt ⊥= = +P
r r = la magnitud de la aceleración, donde N es un vector
unitario perpendicular a T ⇒ ˆ ˆ 0T N⋅ = por definición; la cual es cero solamente si el cuerpo se mueve en línea recta 0a⊥ = con velocidad constante 0a =P ;
NOTA: en generald v dvdt dt
≠r r

8
Un ejemplo importante de movimiento en 2D es el caso de los proyectiles
Un proyectil = cuerpo que recibe una velocidad inicial y luego sigue una trayectoria determinada totalmente por la aceleración gravitacional y la resistencia del aire (habitualmente importante) En primera aproximación podemos ignorar los efectos del aire + la rotación de la tierra + no homogeneidad + no esfericidad El movimientos se decompone sobre dos ejes, independiente è movimiento en un plano vertical En x: velocidad constante 0x xv v= En y: aceleración constante ya g= −
Usando las ecuaciones de la cinemática por estos dos casos nos da dos trayectorias: (2.20) 0 0xx x v t= + , movimiento lineal
(2.21) 20 0
12yy y v t gt= + − , movimiento parabólico
9
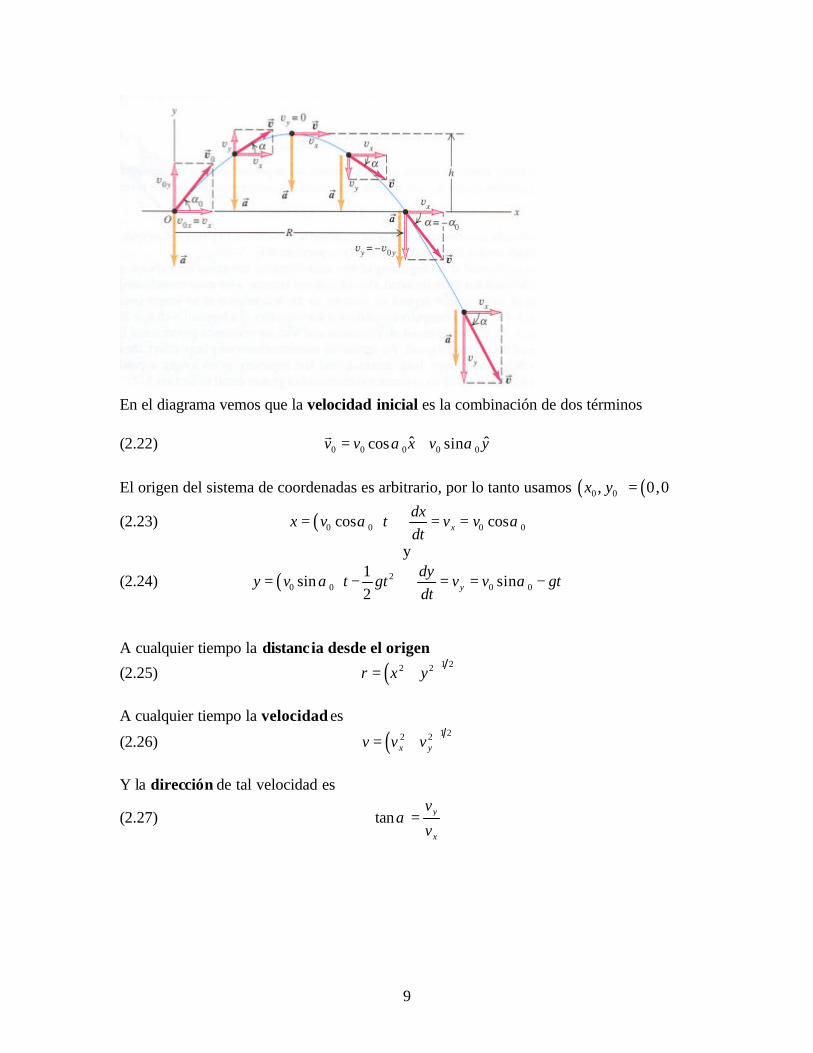
En el diagrama vemos que la velocidad inicial es la combinación de dos términos (2.22) 0 0 0 0 0ˆ ˆcos sinv v x v yα α= +
r
El origen del sistema de coordenadas es arbitrario, por lo tanto usamos ( ) ( )0 0, 0,0x y =
(2.23) ( )0 0 0 0cos cosx
dxx v t v v
dtα α= ⇒ = =
y
(2.24) ( ) 20 0 0 0
1sin sin
2 y
dyy v t gt v v gt
dtα α= − ⇒ = = −
A cualquier tiempo la distancia desde el origen
(2.25) ( )1 22 2r x y= +
A cualquier tiempo la velocidad es
(2.26) ( )1 22 2x yv v v= +
Y la dirección de tal velocidad es
(2.27) tan y
x
v
vα =

10
Analíticamente, se deduce la forma de la trayectoria
Primero aislamos el tiempo; como ( )0 00 0
coscos
xx v t t
vα
α= ⇒ =
Sustituyendo en la segunda ecuación:
(2.28) ( ) 20 2 2
0 0
tan2 cos
gy x x
vα
α= −
Esta ecuación tiene la forma de una parábola 2y bx cx= −

11
Rotación El otro tipo de movimiento es la rotación – Ej. = movimiento en un círculo ⇒ Existe una componente de la aceleración ⊥ a la trayectoria, rada
rque es 0≠ , aún si la
velocidad vr
es constante
Ej. movimiento circular uniforme ⇒ v v=
r 0a⇒ =P
Pero con la dirección cambia
ˆ ˆ ˆdva a T a N a N
dt ⊥ ⊥= = + =P
r r
⇒ rada a a⊥= =r
La trayectoria = círculo de radio constante R
Tiene una relación simple entre la velocidad tangencial y la aceleración radial Consideramos el triangulo formado por dos diferentes puntos de la trayectoria: a) en 1P , 1 1v OP⊥
r y en 2P , 2 2v OP⊥
r
Consideramos el triangulo formado por el cambio de velocidad: b) 2 1 1 2v v v v v v∆ = − ⇒ + ∆ =
r r r r r r
Geométricamente podemos ver que el ángulo φ∆ es el mismo en (a) que en (b) porque los triángulos 1 2OPP y 1 2Op p son similares

12
Por lo tanto, las razones de los lados correspondientes deben ser igual
11
v s sv v
v R R∆ ∆ ∆
= ⇒ ∆ =r r
donde s∆ en realidad es un arco circular
Por definición, la magnitud de la aceleración promedio : 1rad
v v sa
t R t∆ ∆
= =∆ ∆
r
Por definición, la aceleración instantánea, 1 1
0lim
t
v vs dsa
R t R dt∆ →
∆= =
∆
Pero como 1
dsv
dt= = v
(2.29) 2 21
radv v
aR R
= =
Esto es la aceleración centrípeta (porque es dirigida por el centro del círculo) Se define el Periodo, T , como el tiempo requerido para hacer una revolución completa:
(2.30) 2 2R R
T vv Tπ π
= ⇒ =
Eliminando la velocidad:
(2.31) 2
2
4rad
Ra
Tπ
=
En general constantev ≠r
⇒ movimiento circular no uniforme ⇒ dos componentes de aceleración no constantes
(2.32) tan
d va
dt=
r y
2
radv
aR
=

13
Relación con la geometría La visión “classica” de entender la cinemática es la siguiente: describe una masa que se desplaza en un volumen del espacio en un tiempo definido è problema es que ni el espacio ni el tiempo esta definido La manera más moderna de ver este problema = materia-espacio-tiempo è El espacio-tiempo son entidades ligadas al movimiento (transformación) de la masa (energía) – las 3 dimensiones del espacio = grados de libertad de energía, y el tiempo es un parámetro que describe el cambio del estado de esta energía La geometría (espacio-tiempo) nace de las interacciones entre partículas - Ej. la relatividad especial y general de Einstein donde la gravedad es la curvatura del espacio-tiempo - esto es el asunto de la geometría diferencial En física moderna todas las interacciones fundamentales entre partículas tienen una fuerte componente geométrica (ej. la teoría de las cuerdas para las partículas)
Relatividad galileana - Los movimientos son relativos Galileo demuestro que todos los movimientos son relativo a un observador – Ej. el movimiento diurna es producido por la rotación de la Tierra è la Tierra no es inmóvil En física esta observación (o experiencia) es extremamente significativa è implica que no hay punto especial de origen en el espacio-tiempo De manera operativaè aplicar una transformación del tipo:
• Translación en tiempo = transformación t t t s′ = +a • Translación en espacio = transformación 0r r r r′ = +
r r r ra No cambia nada a las ecuaciones describiendo los movimientos (son invariantes) è Esta propiedad define un sistema inercial (= un sistema no acelerado) En el modelo materia-espacio-tiempo è en un sistema inercial (teorema de Noether):
• La primera transformación, translación en tiempo, es equivalente a la ley de conservación de la energía
• y la segunda transformación, translación en espacio, es equivalente a la ley de conservación de la cantidad de movimiento
14
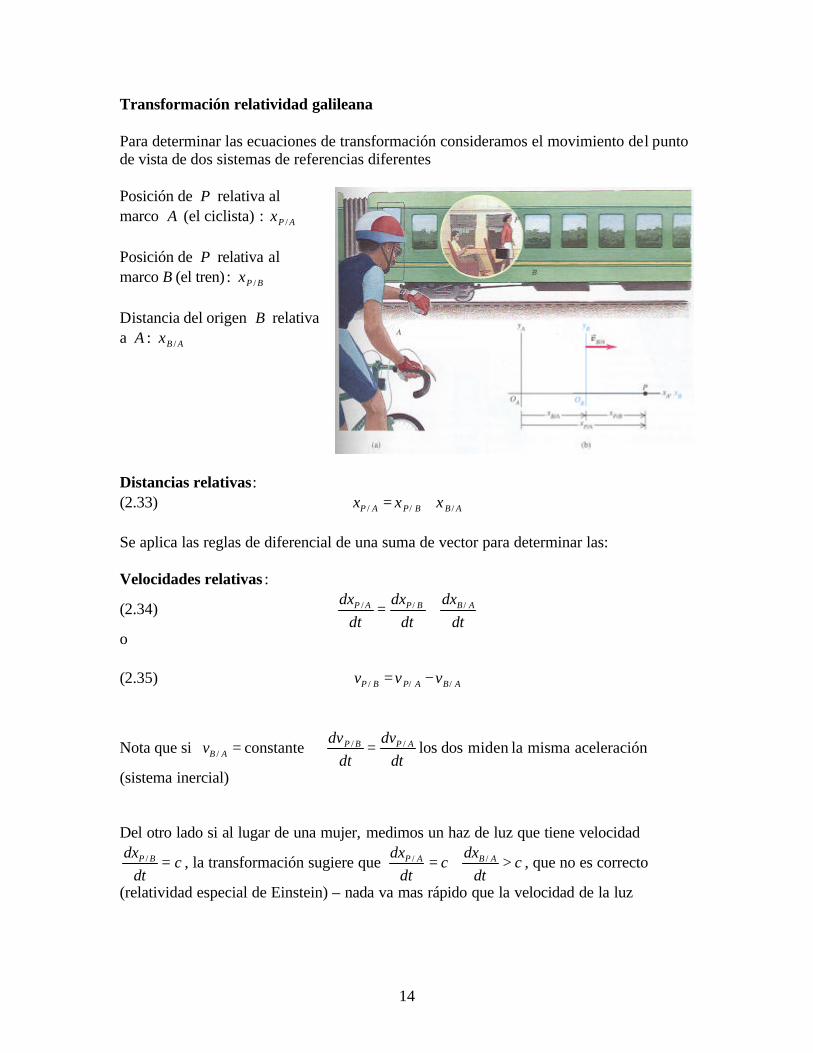
Transformación relatividad galileana Para determinar las ecuaciones de transformación consideramos el movimiento del punto de vista de dos sistemas de referencias diferentes Posición de P relativa al marco A (el ciclista) : /P Ax Posición de P relativa al marco B (el tren) : /P Bx Distancia del origen B relativa a A : /B Ax
Distancias relativas: (2.33) / / /P A P B B Ax x x= + Se aplica las reglas de diferencial de una suma de vector para determinar las: Velocidades relativas :
(2.34) / / /P A P B B Adx dx dxdt dt dt
= +
o (2.35) / / /P B P A B Av v v= −
Nota que si / // constante P B P A
B A
dv dvv
dt dt= ⇒ = los dos miden la misma aceleración
(sistema inercial) Del otro lado si al lugar de una mujer, medimos un haz de luz que tiene velocidad
/P Bdxc
dt= , la transformación sugiere que / /P A B Adx dx
c cdt dt
= + > , que no es correcto
(relatividad especial de Einstein) – nada va mas rápido que la velocidad de la luz

15
Ejemplo: Y maneja al Norte a 88 km/h y T viaja al Sur a 104 km/h Usando referenc ia: Este-Norte = x-y a) Velocidad de T relativa a Y:
/ / / 192T Y T E Y E
kmv v v
h= − = −
b) Velocidad de Y relativa a T:
/ / 192T Y Y T
kmv v
h= − =
c) ¡La velocidad relativa después de
que T pasó Y es la misma!
En general Posiciones relativas: (2.36) / / /P A P B B Ar r r= +
r r r
Velocidades relativas: (2.37) / / /P A P B B Av v v= +
r r r
Si A y B son dos puntos o marcos de referencia cualesquiera (2.38) / /B A A Bv v= −
r r

16
Ejemplo
Si la velocidad del tren relativa al suelo es / 3.0B A
mv
s=
Y la velocidad de la mujer relativa al tren es /
m1.0
sP Bv =
La velocidad de la mujer relativa al ciclista es el vector /P Av
r relativo al suelo
Su magnitud, 2 2/ / /
m3.2
sP A B A P Bv v v= + =
Y su dirección /
/
tan 18P B
B A
vv
α α= ⇒ = o

17
Ejemplo A: aeroplano volando en viento cruzado El viento sopla a 100 km/h al Este El aeroplano se mueve al norte a 240 km/h La velocidad del aeroplano
/ / /P E P A A Ev v v= +r r r
Magnitud
2 2/ / /
km260
hP E P A A Ev v v= + =
y dirección
100km harctan 23 E of N
240km hφ = = o .
Incrementa la velocidad pero desvía al este
Ejemplo B: corrección para volar al Norte El aeroplano debe compensar moviendo se con ánguloα hacia el Oeste Velocidad del aeroplano,
/ / /P A P E A Ev v v= −r r r
Magnitud
2 2/ / /
km218
hP E P A A Ev v v= − =
y dirección
100km harcsin 25 W of N
240km hφ = = o .
Viajar contra el viento, disminuye su velocidad