cÁlculo. prÁctica 2. funciones de varias variables. diferenciabilidad...
TRANSCRIPT

(1.1.2)(1.1.2)
(1.1.1)(1.1.1)
(1.1.4)(1.1.4)
(1.1.3)(1.1.3)
CÁLCULO. PRÁCTICA 2. FUNCIONES DE VARIAS VARIABLES.
DIFERENCIABILIDAD. PLANO TANGENTE.
Dada la función calcular las rectas tangentes a la
función g en el punto según las direcciones
Representarlas dichas curvas, el plano tangente y deducir si la función es diferenciable en (-1,1).
restart:with(plots):
g:=(x,y)->cos((2*y^2+x^2)/4);
theta:=0;
x0:=-1;y0:=1;v1:=cos(theta);v2:=sin(theta);
Dg:=limit((g(x0+h*v1,y0+h*v2)-g(x0,y0))/h,h=0);
g1:=plot3d(g(x,y),x=-3..3,y=-3..3):
g2:=spacecurve([x0+t*v1,y0+t*v2,g(x0,y0)+Dg*t],t=-3..3,color=blue,thickness=5):
display(g1,g2);

(1.1.6)(1.1.6)
(1.1.7)(1.1.7)
(1.1.5)(1.1.5)
theta:=Pi/6;
x0:=-1;y0:=1;v1:=cos(theta);v2:=sin(theta);
Dg:=limit((g(x0+h*v1,y0+h*v2)-g(x0,y0))/h,h=0);
g3:=spacecurve([x0+t*v1,y0+t*v2,g(x0,y0)+Dg*t],t=-3..3,color=red,thickness=5):
display(g1,g2,g3);
(1.1.9)(1.1.9)
(1.1.8)(1.1.8)
(1.1.10)(1.1.10)
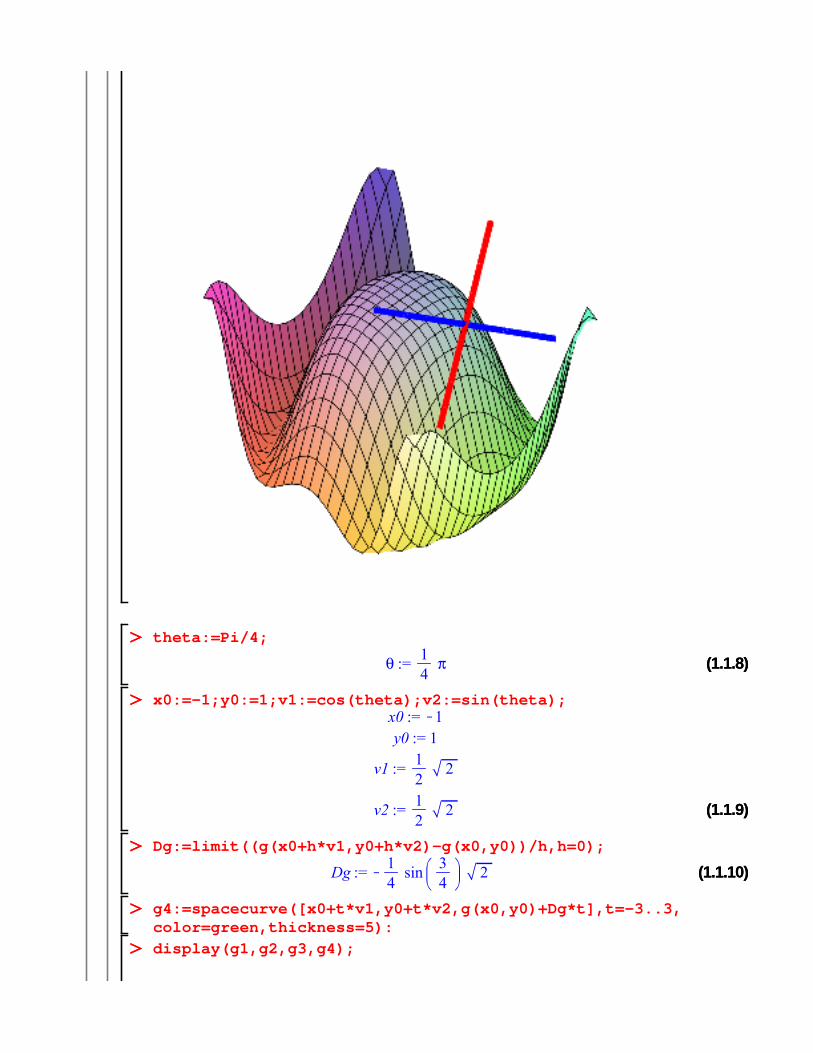
theta:=Pi/4;
x0:=-1;y0:=1;v1:=cos(theta);v2:=sin(theta);
Dg:=limit((g(x0+h*v1,y0+h*v2)-g(x0,y0))/h,h=0);
g4:=spacecurve([x0+t*v1,y0+t*v2,g(x0,y0)+Dg*t],t=-3..3,color=green,thickness=5):
display(g1,g2,g3,g4);
(1.1.11)(1.1.11)
(1.1.13)(1.1.13)
(1.1.14)(1.1.14)
(1.1.12)(1.1.12)
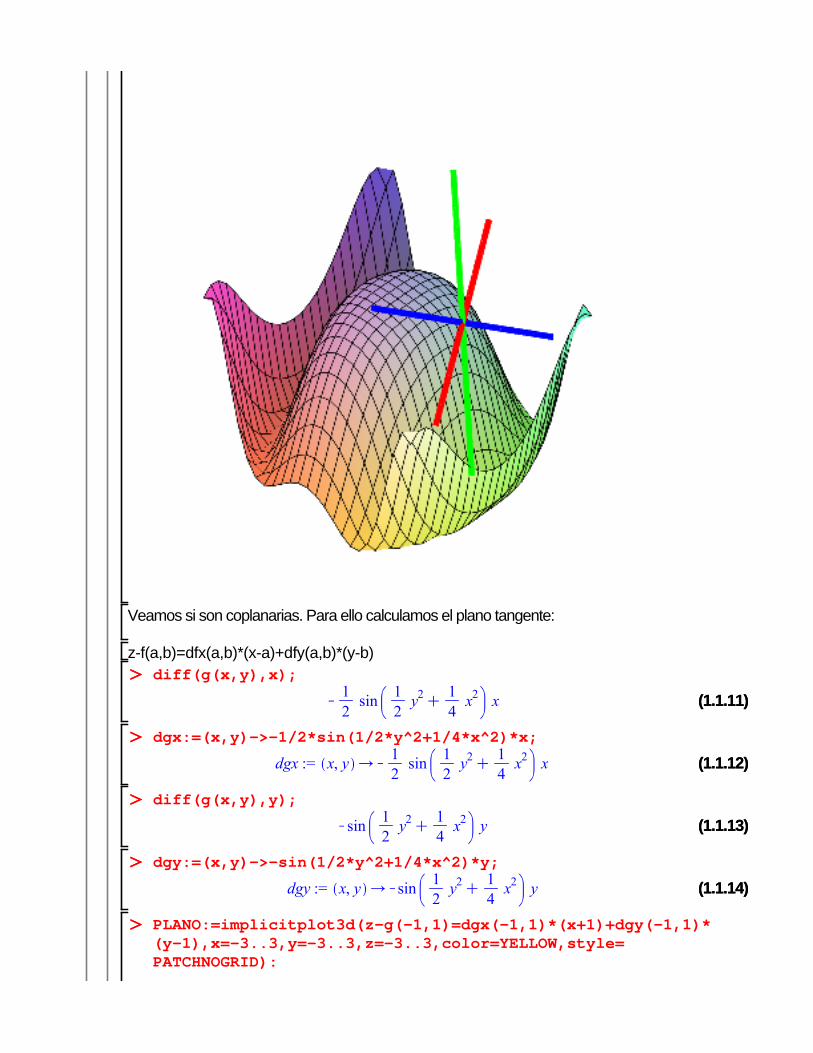
Veamos si son coplanarias. Para ello calculamos el plano tangente:
z-f(a,b)=dfx(a,b)*(x-a)+dfy(a,b)*(y-b)diff(g(x,y),x);
dgx:=(x,y)->-1/2*sin(1/2*y^2+1/4*x^2)*x;
diff(g(x,y),y);
dgy:=(x,y)->-sin(1/2*y^2+1/4*x^2)*y;
PLANO:=implicitplot3d(z-g(-1,1)=dgx(-1,1)*(x+1)+dgy(-1,1)*(y-1),x=-3..3,y=-3..3,z=-3..3,color=YELLOW,style=PATCHNOGRID):

(2.1.1)(2.1.1)
display(g1,g2,g3,g4,PLANO);
Realizar el mismo ejercicio con la función en el punto
restart:with(plots):
f:=(x,y)->(x^3+y^3+x^4)/(x^2+y^2);f(0,0):=0;
Calcular las rectas tangentes a la funcion h en el punto segun las direcciones

(2.1.2)(2.1.2)
(2.1.4)(2.1.4)
(2.1.5)(2.1.5)
(2.1.3)(2.1.3)
theta:=0;
x0:=0;y0:=0;v1:=cos(theta);v2:=sin(theta);
Df:=limit((f(x0+h*v1,y0+h*v2)-f(x0,y0))/h,h=0);
f1:=plot3d(f(x,y),x=-2..2,y=-2..2):
f2:=spacecurve([x0+t*v1,y0+t*v2,f(x0,y0)+Df*t],t=-3..3,color=blue,thickness=5):
display(f1,f2);
theta:=Pi/6;

(2.1.8)(2.1.8)
(2.1.7)(2.1.7)
(2.1.6)(2.1.6)
(2.1.5)(2.1.5)
x0:=0;y0:=0;v1:=cos(theta);v2:=sin(theta);
Df:=limit((f(x0+h*v1,y0+h*v2)-f(x0,y0))/h,h=0);
f3:=spacecurve([x0+t*v1,y0+t*v2,f(x0,y0)+Df*t],t=-3..3,color=red,thickness=5):
display(f1,f2,f3);
theta:=Pi/4;

(2.1.8)(2.1.8)
(2.1.11)(2.1.11)
(2.1.10)(2.1.10)
(2.1.5)(2.1.5)
(2.1.9)(2.1.9)
x0:=0;y0:=0;v1:=cos(theta);v2:=sin(theta);
Df:=limit((f(x0+h*v1,y0+h*v2)-f(x0,y0))/h,h=0);
f4:=spacecurve([x0+t*v1,y0+t*v2,f(x0,y0)+Df*t],t=-3..3,color=green,thickness=5):
display(f1,f2,f3,f4);
Veamos si son coplanarias. Para ello calculamos el plano tangente:dfx(0,0):=limit((f(h,0)-f(0,0))/h,h=0);

(2.1.8)(2.1.8)
(2.1.12)(2.1.12)
(2.1.5)(2.1.5)
dfy(0,0):=limit((f(0,h)-f(0,0))/h,h=0);
PLANITO:=implicitplot3d(z-f(0,0)=dfx(0,0)*x+dfy(0,0)*y,x=-2..2,y=-2..2,z=-2..2,color=yellow,style=PATCHNOGRID):
display(f1,f2,f3,f4,PLANITO);
No existe el plano tangente. No es diferenciable.