breves para todo un país hoja informativa
TRANSCRIPT

El Servicio Autónomo de Geografía y Carto-grafía Nacional de Venezuela ha alcanzado
el desafío de elaborar la cartografía de la regiónsituada entre el río Orinoco y la frontera conBrasil. Esta remota región venezolana, casi per-manentemente nublada, se caracteriza por suclima cálido y húmedo. La topografía de estaregión es accidentada, con escasas áreas llanasy abruptas elevaciones que emergen desde lasllanuras. Su superficie se encuentra casi com-pletamente cubierta por selva tropical, con árbo-les de alturas de hasta 40 m.
Este proyecto cartográfico consistió en la pro-ducción de imágenes de ortofoto digital de 5 m/píxel y de mapas de ortofoto a escala1:50 000, con curvas cada 40 m derivadas deun modelo digital de elevaciones muy densosobre una región de 266 616 km2. Un total de536 hojas recubren el área de referencia.
El Institut Cartogràfic de Catalunya presentóuna propuesta técnica basada en la tecnologíainterferométrica SAR para asegurar que los pro-ductos se obtendrían y se entregarían en unperíodo previsible de tiempo. Dada la precisiónnecesaria y las especificaciones de la medida delpunto/píxel, se excluyó el uso del satélite radar,y se propuso y se selecció la utilización del radarinterferométrico aerotransportado de paso únicoAeS-1 de la empresa AeroSensing Radarsysteme,GmbH.
El sistema AeS-1 se basa en la información GPSe INS para la georeferenciación, por esto el con-trol sobre el terreno se utiliza sólo con propósi-tos de comprobación. Los puntos de control sepueden visualizar desde la imagen del radarmediante la instalación de reflectores de radar(corner reflectors) en posiciones conocidas.Finalmente, se estableció la situación sobre el terre-no y sobre la imagen del radar de 35 reflectores.
La campaña de vuelo se llevó a cabo entre el28 de octubre de 1998 y el 3 de febrero de 1999,con un total de 66 días de vuelo efectivo.
El primer paso del proceso consistió en pro-cesar la reconstrucción de dos imágenes com-plejas (intensidad y fase) a partir de los datosen bruto de dos antenas. Elinterferograma, que se ob-tiene multiplicando la prime-ra imagen con el conjugadocomplejo de la segunda,representa la diferencia defase dada la elevación delterreno y se expresa enmódulo 2π. El proceso de“desenrollar” la diferenciade fase se obtiene calculan-do la diferencia absoluta defase sumando (o restando)2π cuando se detecta unavariación más grande que2π en el interferograma.Entonces se calculan las ele-vaciones desde la fase abso-luta una vez ésta se hacalibrado. Una vez se cono-cen las elevaciones, se pro-cede a la geocorrección ymontaje de las imágenescorrespondientes a las di-ferentes líneas de vuelo mediante un proceso demosaico.
Para obtener una estima-ción de la altura de los árbo-les y para convertir el ModeloDigital de Superficie (DSM)en un Modelo Digital delTerreno (DTM) se utiliza una
cobertura de imágenes del satélite Landsat prác-ticamente libre de nubes. Después de corregis-trar con las imágenes de radar, las escenas sesegmentan utilizando un clasificador máximoverosímil. Las diferencias de altura entre las cate-gorías adyacentes se obtienen dibujando perfi-les a través de ellas y así es posible extraer lasalturas desde el DSM. El resultado es un cuadroque indica la diferencia media de altura paracada tipo de transición entre las categorías. Lacategoría del suelo se utiliza como referencia,y las alturas se restan del DSM obteniendo asíel DTM. Las categorías se derivan de las textu-ras de las imágenes de radar en los lugares dondelas escenas del Landsat se encuentran recu-biertas de nubes.
Llegados a este punto, las curvas de nivel secalculan automáticamente y se suprimen losmínimos locales. Los nombres geográficos seextraen de mapas existentes y se fijan en el mapa.Finalmente, una vez incorporados cuadros,leyendas y márgenes, se filma y se imprime elmapa.
Probablemente, la conclusión más relevantees que el radar interferométrico aerotranspor-tado de paso único representa un instrumentofiable para misiones de cartografía en áreas carac-terizadas por la alta nubosidad. Por otro lado, serequiere un período de tiempo considerable paraprocesar los datos de radar. Comparativamente,la cantidad de maquinario y tiempo necesarioses muy superior al que supondría una misiónóptica equivalente.
4
El Institut Cartogràfic de Catalunya ha de-sarrollado un sistema SISA (Sistema
Integrado de Sensores Aerotransportados) queintegra sensores aerotransportados (de imagen,de posición, de actitud, etc.) y algoritmos quese pueden usar para georeferenciar sensores deimagen. Hasta ahora el SISA se ha utilizado paraorientar el sistema CASI (Compact Airborne Spec-
tographic Imager) y en un vuelo gravimétricosobre Cataluña.
El objetivo principal del SISA es proporcio-nar, a un sensor de imagen, actitud y posiciónprecisa. Para llevar a cabo esta tarea, el SISA inte-gra datos GPS (Global Positioning System) y datosde una IMU (Inertial Measurement Unit), y dis-pone de un procedimiento de sincronización deconjunto de todos los sensores. La configura-ción actual del SISA proporciona una interficieal subsistema de actitud (basado en un INS LittonLTN 101 FLAGSHIP –Inercial Navigation System–),una interficie a un receptor GPS de doble fre-cuencia y un procedimiento robusto para sin-cronizar el sensor de actitud (IMU/INS) y elsensor de imagen (CASI). El ICC ha desarrolla-do el programario para asegurar la correcta asig-nación de tiempo a los datos inerciales y a las
imágenes, y determinar la trayectoria y actitudde la plataforma aerotransportada.
Las diferencias entre el sistema de referen-cia imagen y el sistema de referencia inercialcausadas por el montaje de los sensores sondeterminadas conjuntamente con ciertos pará-metros de calibración del CASI en un ajuste foto-gramétrico usando el programario GeoTeX/ACX.
Los métodos de orientación directa requierenun buen conocimiento a priori de las relacionesgeométricas entre los sensores involucrados. Laestabilidad del acoplamiento SISA-CASI se haestudiado comparando los parámetros de matri-ces de desalineamiento y autocalibración enseries de vuelos CASI.
A modo de conclusión, el SISA demuestra suvalidez para la orientación directa del sistemaCASI.
La base de datos altimétrica en malla regularque tiene el Institut Cartogràfic de Catalunya
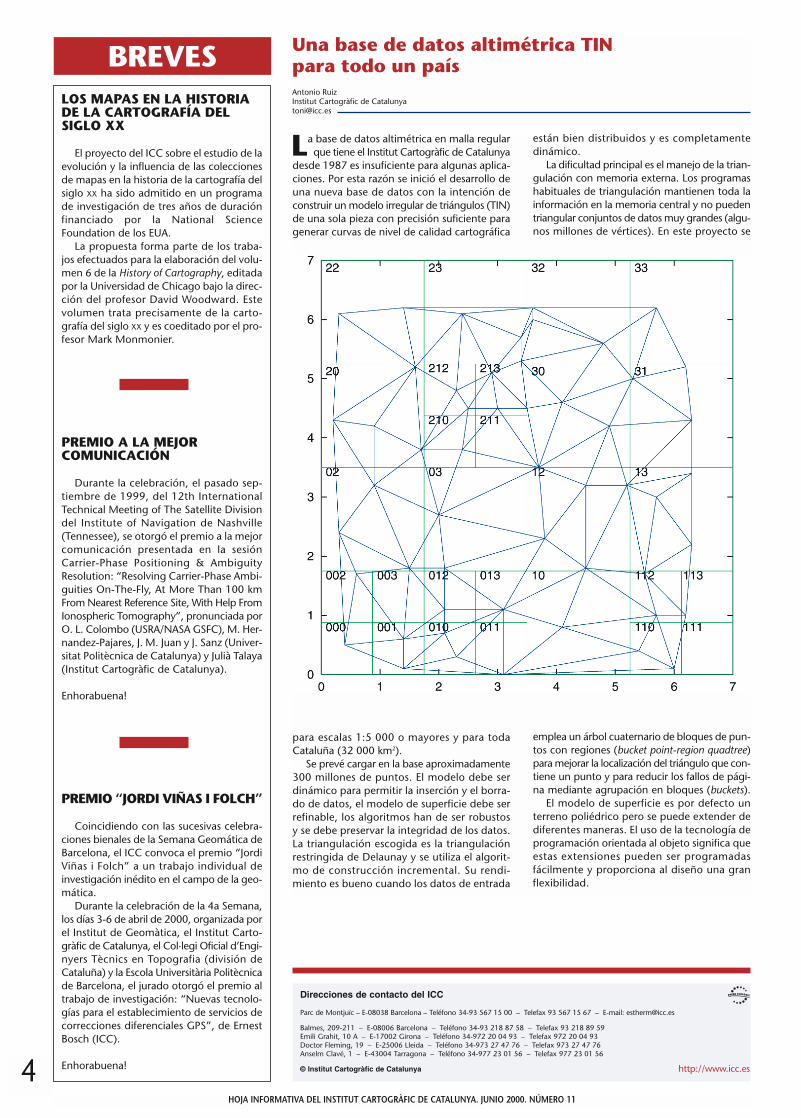
desde 1987 es insuficiente para algunas aplica-ciones. Por esta razón se inició el desarrollo deuna nueva base de datos con la intención deconstruir un modelo irregular de triángulos (TIN)de una sola pieza con precisión suficiente paragenerar curvas de nivel de calidad cartográfica
para escalas 1:5 000 o mayores y para todaCataluña (32 000 km2).
Se prevé cargar en la base aproximadamente300 millones de puntos. El modelo debe serdinámico para permitir la inserción y el borra-do de datos, el modelo de superficie debe serrefinable, los algoritmos han de ser robustosy se debe preservar la integridad de los datos.La triangulación escogida es la triangulaciónrestringida de Delaunay y se utiliza el algorit-mo de construcción incremental. Su rendi-miento es bueno cuando los datos de entrada
están bien distribuidos y es completamentedinámico.
La dificultad principal es el manejo de la trian-gulación con memoria externa. Los programashabituales de triangulación mantienen toda lainformación en la memoria central y no puedentriangular conjuntos de datos muy grandes (algu-nos millones de vértices). En este proyecto se
emplea un árbol cuaternario de bloques de pun-tos con regiones (bucket point-region quadtree)para mejorar la localización del triángulo que con-tiene un punto y para reducir los fallos de pági-na mediante agrupación en bloques (buckets).
El modelo de superficie es por defecto unterreno poliédrico pero se puede extender dediferentes maneras. El uso de la tecnología deprogramación orientada al objeto significa queestas extensiones pueden ser programadasfácilmente y proporciona al diseño una granflexibilidad.
HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
1
HOJAINFORMATIVAI N S T I T U T C A R T O G R À F I C D E C A T A L U N Y A
A Ñ O 5 � J U N I O 2 0 0 0 � N Ú M E R O 1 1
SUMARIOContribución del ICC en el XIX Congreso de la ISPRS:
Integración de sensores aerotransportados y orientación directa del CASI
Posicionamiento cinemático GPS robusto para la georeferenciación directa
La Visual Factory Suite. Haciendo frente a los requerimientos cambiantes de los sistemas de producción masiva en entornos de proceso de datos espaciales
Extracción de parcelas de imágenes aéreas utilizando “Competición entre Regiones”
Producción de mapas del suelo mediante la fusión de la clasificación multiespectral de imágenes Landsaty el análisis de textura de imágenes de alta resolución
Precisión potencial en la medición de puntos en imágenes MOMS usando un modelo riguroso y funciones racionales
La producción cartográfica en Venezuela utilizando InSAR aerotransportado
Una base de datos altimétrica TIN para todo un país
Los mapas en la historia de la cartografía del siglo XX
Premio a la mejor comunicación
Premio “Jordi Viñas i Folch”
Generalitat de CatalunyaInstitut Cartogràficde Catalunya
Esta hoja es una publicación gratuita disponible en catalán, castellanoe inglés.
Año 5 – Junio 2000 – Número 11 – ISSN: 1137-2389Depósito Legal: B. 39 884-1996
4HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
BREVESLOS MAPAS EN LA HISTORIA DE LA CARTOGRAFÍA DELSIGLO XX
El proyecto del ICC sobre el estudio de laevolución y la influencia de las coleccionesde mapas en la historia de la cartografía delsiglo XX ha sido admitido en un programade investigación de tres años de duraciónfinanciado por la National ScienceFoundation de los EUA.
La propuesta forma parte de los traba-jos efectuados para la elaboración del volu-men 6 de la History of Cartography, editadapor la Universidad de Chicago bajo la direc-ción del profesor David Woodward. Estevolumen trata precisamente de la carto-grafía del siglo XX y es coeditado por el pro-fesor Mark Monmonier.
PREMIO A LA MEJOR COMUNICACIÓN
Durante la celebración, el pasado sep-tiembre de 1999, del 12th InternationalTechnical Meeting of The Satellite Divisiondel Institute of Navigation de Nashville(Tennessee), se otorgó el premio a la mejorcomunicación presentada en la sesiónCarrier-Phase Positioning & AmbiguityResolution: “Resolving Carrier-Phase Ambi-guities On-The-Fly, At More Than 100 kmFrom Nearest Reference Site, With Help FromIonospheric Tomography”, pronunciada porO. L. Colombo (USRA/NASA GSFC), M. Her-nandez-Pajares, J. M. Juan y J. Sanz (Univer-sitat Politècnica de Catalunya) y Julià Talaya(Institut Cartogràfic de Catalunya).
Enhorabuena!
PREMIO “JORDI VIÑAS I FOLCH”
Coincidiendo con las sucesivas celebra-ciones bienales de la Semana Geomática deBarcelona, el ICC convoca el premio “JordiViñas i Folch” a un trabajo individual deinvestigación inédito en el campo de la geo-mática.
Durante la celebración de la 4a Semana,los días 3-6 de abril de 2000, organizada porel Institut de Geomàtica, el Institut Carto-gràfic de Catalunya, el Col·legi Oficial d’Engi-nyers Tècnics en Topografia (división deCataluña) y la Escola Universitària Politècnicade Barcelona, el jurado otorgó el premio altrabajo de investigación: “Nuevas tecnolo-gías para el establecimiento de servicios decorrecciones diferenciales GPS”, de ErnestBosch (ICC).
Enhorabuena!
Direcciones de contacto del ICC
Parc de Montjuïc – E-08038 Barcelona – Teléfono 34-93 567 15 00 – Telefax 93 567 15 67 – E-mail: [email protected]
Balmes, 209-211 – E-08006 Barcelona – Teléfono 34-93 218 87 58 – Telefax 93 218 89 59Emili Grahit, 10 A – E-17002 Girona – Teléfono 34-972 20 04 93 – Telefax 972 20 04 93Doctor Fleming, 19 – E-25006 Lleida – Teléfono 34-973 27 47 76 – Telefax 973 27 47 76Anselm Clavé, 1 – E-43004 Tarragona – Teléfono 34-977 23 01 56 – Telefax 977 23 01 56
© Institut Cartogràfic de Catalunya
PAPER ECOLÒGIC
http://www.icc.es
CONTRIBUCIÓN DEL ICC EN EL XIX CONGRESO DE LA ISPRS
Integración de sensores aerotransportados y orientación directa del CASIRamon Alamús, Julià TalayaInstitut Cartogràfic de Catalunya – [email protected], [email protected]
Los días 16-23 de julio de 2000 se celebrará en Amsterdam el XIXCongreso de la Sociedad Internacional de Fotogrametría y
Teledetección. Al igual que en las anteriores celebraciones, la participa-ción del Institut Cartogràfic de Catalunya estará muy presente porquepresentará cinco pósters, tres comunicaciones y un tutorial. Cada una deestas contribuciones se presenta, de manera resumida, en este númerode la Hoja informativa del ICC aunque, una vez celebrado el Congreso,se publicarán ampliadas en la Web del ICC:
Esta celebración, además, tiene un valor añadido: la Sociedad Españolade Cartografía, Fotogrametría y Teledetección, sociedad que reúne y repre-senta las entidades españolas dedicadas a estas especialidades, presenta-rá su candidatura para que el ICC acoja el XX Congreso de la ISPRS, quese celebrará en el año 2004.
Cabe esperar que esta propuesta tenga la resonancia que todos desea-mos y que Barcelona, una vez más, sea la sede de un acontecimiento inter-nacional que tiene como objetivos la reunión de los más prestigiosostécnicos sobre cartografía, fotogrametría y teledetección, y la puesta encomún de las experiencias y de los nuevos conocimientos que se van des-arrollando y aplicando en estos campos.
La producción cartográfica en Venezuela utilizando InSAR aerotransportadoRoman ArbiolInstitut Cartogràfic de Catalunya – [email protected]
Gloria GonzálezServicio Autónomo de Geografía y Cartografía Nacional, Caracas, Venezuela – [email protected]
Una base de datos altimétrica TIN para todo un paísAntonio RuizInstitut Cartogràfic de [email protected]
Imagen geocodificada después de la corrección radiométrica.
Uno de los métodos que se utiliza con más frecuencia para la obtención de mapas de
usos del suelo es la clasificación supervisada deimágenes multiespectrales del satélite Landsat.No obstante, a menudo el resultado no es sufi-cientemente preciso para la mayoría de los pro-yectos prácticos de teledetección. Aunque seutilizen imágenes multitemporales para la cap-tura de la evolución fenológica de la vegetacióna lo largo del año, se produce un nivel consi-derablemente alto de incertidumbre en algunasde las categorías de la leyenda.
Pese a esto, es muy común disponer de unaserie de datos obtenidos en una área geográfi-ca determinada, ya que cualquier informaciónobtenida en diferentes momentos o por dife-rentes sensores es susceptible de utilización parala adquisición de clasificaciones desde distintastécnicas. Normalmente, cada fuente de datosdiferente es más adecuada para el estudio dediferentes características, como por ejemplo usosurbanos, vegetación, humedad, etc.
Llegados a este punto, se presenta la nece-sidad de obtener un método que combine lasdiferentes clasificaciones para extraer una nuevaque contenga las mejores características de cadauna de ellas. En este trabajo se presenta un algo-ritmo basado en la “Teoría de la Evidencia” quefusiona diferentes mapas de terreno obtenidosa partir de diversas fuentes y diferentes méto-dos de análisis.
Una clasificación supervisada proporcionauna distribución verosímil que nos indica laasignación probable de cada punto/píxel paracada una de las categorías de la leyenda. Conla utilización de algunas áreas de prueba, tam-bién se puede obtener una medida individualdel porcentaje de calidad de cada una de las
fuentes. El método que se presenta, consis-tente en fusionar dos clasificaciones diferen-tes de la misma área geográfica, se basa en lacombinación de sus verosimilitudes (probabi-lidades asignadas) y el nivel de calidad de laclasificación de cada fuente. Al combinarlasobtenemos la distribución de una nueva pro-babilidad asignada y, por esto, de una nuevaclasificación.
El comportamiento de este método y la mejo-ra que supone en los métodos de clasificaciónusuales se evalúan utilizando dos fuentes dedatos, aunque el método se podría extenderfácilmente e inmediatamente a diversas fuen-tes. Una de ellas es un grupo de imágenes mul-tiespectrales Landsat recogidas en dos estacionesdel año, con el que se obtiene una primera cla-sificación. La segunda fuente de datos es unaortofoto en blanco y negro con una resolucióna 2,5 punto/píxel, producida mediante foto-grafía aérea. Para utilizar la resolución espacialmás alta comparada con la del Landsat, se eje-cuta un análisis de texturas y así se obtiene delas bandas derivadas una segunda clasificación.Las verosimilitudes de asignación entre las dosclasificaciones se combinan utilizando un pesodiferente según el acierto de la clasificación ori-ginal. De esta manera se obtiene una nueva vero-similitud.
Si se calcula un nuevo nivel de acierto de estaclasificación final para evaluar su precisión, sealcanza un resultado superior al obtenido en lascategorías originales. Así, se puede llegar a laconclusión que la “Teoría de la Evidencia” pro-porciona un buen marco para combinar clasifi-caciones individuales obtenidas desde fuentesde datos diferentes, reteniendo lo mejor de cadauna de ellas.
En este artículo se considera el problema de segmentar parcelas que aparecen en las imágenes aéreas utilizando una generalización de
técnicas de “Crecimiento de Regiones” combinadas con modelos defor-mables. Esta aproximación combinada se llama “Competición entreRegiones”. Los modelos deformables son una generalización del méto-do de los Snakes para adaptar dinámicamente un contorno vectorial auna región de interés aplicando técnicas de minimización de energía.
Dado el problema de segmentación de parcelas, las técnicas de“Crecimiento de Regiones” nos interesan para obtener los parámetrosestadísticos de las regiones y dividir la imagen ráster en parcelas homo-géneas. La “Competición entre Regiones” combina las mejores calida-des de las técnicas de Snakes/Globus y “Crecimiento de Regiones”. Estealgoritmo se basa en una minimización de energía que dinámicamenteajusta los contornos de regiones dependiendo de los parámetros esta-dísticos que se van actualizando y de las condiciones impuestas a estoscontornos, como son mínima longitud y baja curvatura. A partir del hechode que técnicas ya existentes como los modelos de Snakes/Globus,“Crecimiento de Regiones” y Minimum Description Language (MDL) yatratan este problema desde distintos puntos de vista, en esta aproximaciónse combinan dentro de un marco estadístico común para tener las venta-jas de los tres métodos. Con esta estrategia, el hecho de preservar las carac-
terísticas topológicas de las parcelas guía y hace más robusto el proceso deagregación de píxeles de regiones homogéneas.
En la “Competición entre Regiones” cada área se modela por una dis-tribución estadística ya que algunas se agrupan para formar regionessiguiendo el criterio de homogeneidad en sus valores radiométricos.Una región se considera homogénea si sus valores de intensidad son con-sistentes al haber sido generados por una familia preespecificada de dis-tribuciones estadísticas, en nuestro caso la distribución “Normal”.
El proceso es iterativo y parte de una pequeña área circular alrededorde un punto inicial, dado por el operador, que se considera como el con-torno inicial y que también sirve para tener la primera aproximación de losparámetros estadísticos de la parcela. Partiendo de estos datos se creandos regiones R y S (donde S es la región complementaria de R) y se cal-culan las correspondientes probabilidades P(I | R) y P(I | S) (donde I es laimagen). El desplazamiento del contorno es determinante por la razónde similitud entre las dos regiones. La frontera entre las dos regiones semueve selectivamente a la imagen deformando la región R, dependiendo
de si las características de una pequeña área alrededor de cada punto dela frontera de R se aproximan más a P(I | R) o a P(I | S). Así, regiones adya-centes compiten por la propiedad de los píxeles a lo largo de sus fronte-ras, sujetas a las restricciones impuestas de suavidad de formas.
Dos son las fuerzas que actúan sobre el contorno de la región paraminimizar su energía: la fuerza externa que decide incluir/excluir un puntode la frontera de una región, como se ha descrito anteriormente, y la fuer-za interna donde se incorporan las condiciones que deberá cumplir elcontorno asegurando su suavidad en la evolución de su forma a lo largode las diferentes iteraciones para obtener una solución.
Para reducir el tiempo de proceso y para asegurar unos resultados másprecisos se han estudiado las características de los datos iniciales que entre-ga el operador. Además, se han comparado distintas inicializacionespara obtener una mejor estimación de los parámetros probabilísticos ini-ciales y para mejorar el rendimiento del proceso. Estudiando la conver-gencia del proceso en diferentes casos, se han desarrollado distintasestrategias para detener el proceso iterativo cuando se considera que seha obtenido una solución, una de éstas es la correlación de formas decontornos entre dos iteraciones consecutivas del proceso.
Para adaptar el algoritmo de “Competición entre Regiones” a nuestrasaplicaciones se ha extendido la aproximación mediante el uso de unaparametrización del contorno que utiliza B-Splines. Una de las razonespara seleccionar esta representación ha sido la fácil y compacta maneraque tiene para recoger la regularidad de las formas de las regiones. Otraventaja de los B-Splines es la rapidez del cálculo de sus derivadas, enton-ces las fuerzas internas, como la curvatura, se pueden introducir en elmodelo con un bajo coste. También se han desarrollado estrategias paracontrolar la aparición de lazadas y ayudar a la fuerza interna a mantenerla suavidad en la forma.
Nuestro objetivo ha sido recuperar la frontera de las parcelas que apa-recen en las fotografías aéreas de la manera más sencilla posible. Despuésde sospesar el beneficio del automatismo y el coste de la detección delos posibles errores de este proceso, se decidió desarrollar herramientassemiautomáticas. En nuestra aproximación el sistema es asistido por elusuario de dos maneras: primero, dando un punto dentro de la región asegmentar y, después, aceptando, rechazando o editando el resultadoobtenido, por esto ha sido integrado en un menú de edición donde ade-más se incorporan herramientas de tratamiento de un conjunto de con-tornos vectoriales.
El sistema se ha desarrollado en un entorno amigable para el usuario,se ha validado en numerosas imágenes aéreas y los algoritmos han sidoimplementados de manera que pueden ser fácilmente incorporados enun SIG.
La construcción de sistemas de programariopara producción masiva en lotes enlazan-
do múltiples programas (“factorías” en este con-texto) siempre ha sido una tarea difícil y pesada,que habitualmente deriva en la entrega de solu-ciones más bien inflexibles; además, se precisapersonal altamente cualificado, no sólo para cons-truir dichos sistemas sino también para explo-tarlos. Las razones que causan estas dificultadespueden agruparse de la siguiente manera:
Enlace. Combinar un conjunto de programaspara crear un determinado flujo de trabajoes una tarea donde aparecen dificultadestécnicas.
Cambio. Se piden nuevos productos; aparecenalgoritmos mejorados; es necesario tratarnuevos formatos de datos; por tanto, hayque mantener constantemente los sistemasexistentes o crear nuevos.
Complejidad. Sólo los expertos en un determi-nado dominio son capaces de establecercual es el flujo de trabajo correcto para obte-ner un determinado producto. Los inge-nieros de programario, habitualmente, noposeen este conocimiento, tan necesariopara construir el sistema perseguido.
Estos problemas conducen a sistemas rígi-dos, muy lejos de ser capaces de hacer frente
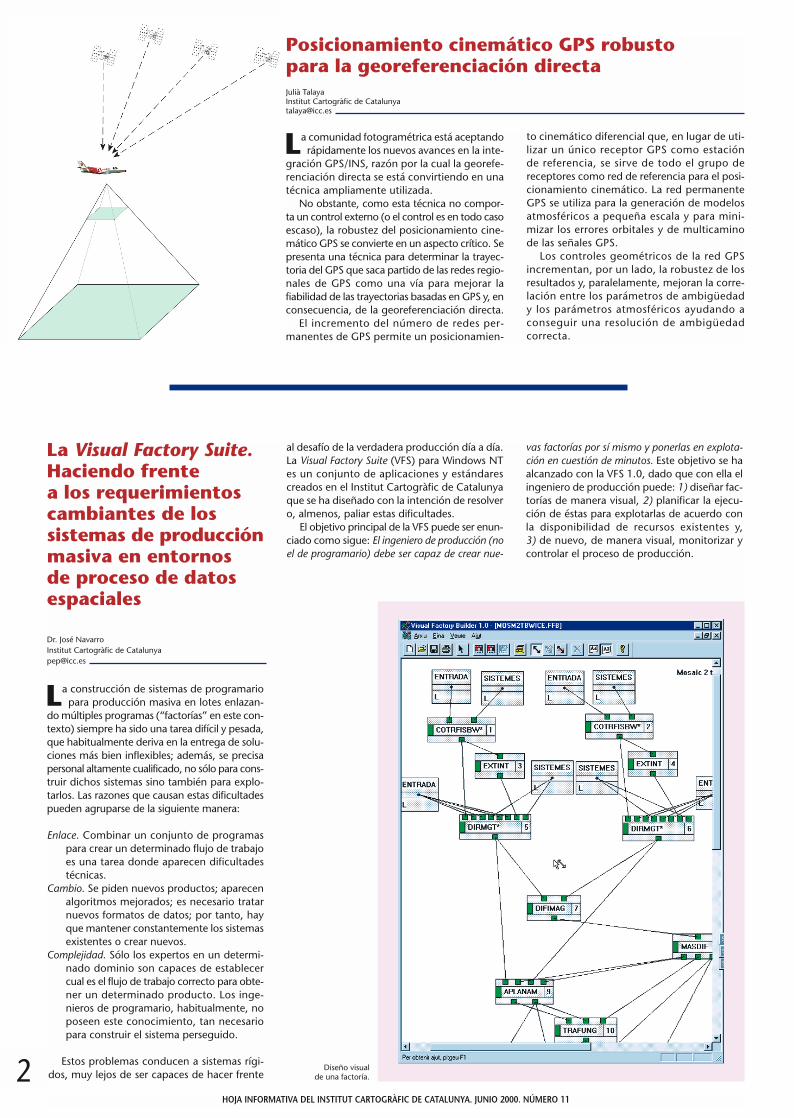
al desafío de la verdadera producción día a día.La Visual Factory Suite (VFS) para Windows NTes un conjunto de aplicaciones y estándarescreados en el Institut Cartogràfic de Catalunyaque se ha diseñado con la intención de resolvero, almenos, paliar estas dificultades.
El objetivo principal de la VFS puede ser enun-ciado como sigue: El ingeniero de producción (noel de programario) debe ser capaz de crear nue-
vas factorías por sí mismo y ponerlas en explota-ción en cuestión de minutos. Este objetivo se haalcanzado con la VFS 1.0, dado que con ella elingeniero de producción puede: 1) diseñar fac-torías de manera visual, 2) planificar la ejecu-ción de éstas para explotarlas de acuerdo conla disponibilidad de recursos existentes y, 3) de nuevo, de manera visual, monitorizar ycontrolar el proceso de producción.
HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
2 3HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
La comunidad fotogramétrica está aceptandorápidamente los nuevos avances en la inte-
gración GPS/INS, razón por la cual la georefe-renciación directa se está convirtiendo en unatécnica ampliamente utilizada.
No obstante, como esta técnica no compor-ta un control externo (o el control es en todo casoescaso), la robustez del posicionamiento cine-mático GPS se convierte en un aspecto crítico. Sepresenta una técnica para determinar la trayec-toria del GPS que saca partido de las redes regio-nales de GPS como una vía para mejorar lafiabilidad de las trayectorias basadas en GPS y, enconsecuencia, de la georeferenciación directa.
El incremento del número de redes per-manentes de GPS permite un posicionamien-
to cinemático diferencial que, en lugar de uti-lizar un único receptor GPS como estaciónde referencia, se sirve de todo el grupo dereceptores como red de referencia para el posi-cionamiento cinemático. La red permanenteGPS se utiliza para la generación de modelosatmosféricos a pequeña escala y para mini-mizar los errores orbitales y de multicaminode las señales GPS.
Los controles geométricos de la red GPSincrementan, por un lado, la robustez de losresultados y, paralelamente, mejoran la corre-lación entre los parámetros de ambigüedady los parámetros atmosféricos ayudando aconseguir una resolución de ambigüedadcorrecta.
Posicionamiento cinemático GPS robusto para la georeferenciación directa Julià TalayaInstitut Cartogràfic de [email protected]
Ejemplo de ortofoto obtenida por fotografía aérea pancromática.
Semillas y contornos resultantes aplicandola parametrización por B-Splines.
Diseño visual de una factoría.
Parcelas obtenidas con un 60%más de rapidez que cuando sedibujan manualmente y con unaprecisión de subpíxel.
Imagen de textura en falso color.
Clasificación final obtenida usando la “Teoría de la Evidencia”.
Producción de mapas del suelo mediante la fusión de la clasificación multiespectral de imágenes Landsat y el análisis de textura de imágenes de alta resoluciónXavier Otazu, Roman ArbiolInstitut Cartogràfic de [email protected], [email protected]
Extracción de parcelas de imágenes aéreas utilizando “Competición entre Regiones”Margarita TorreInstitut Cartogràfic de Catalunya – [email protected]
Petia RadevaCentre de Visió per Computador. Universitat Autònoma de Barcelona, España – [email protected]
La Visual Factory Suite.Haciendo frente a los requerimientos cambiantes de los sistemas de producciónmasiva en entornos de proceso de datosespaciales
Dr. José NavarroInstitut Cartogràfic de [email protected]
El estudio de precisión potencial en la medición de puntos en imáge-nes MOMS usando un modelo riguroso y funciones racionales empe-
zó por la iniciativa del ISPRS.WGII/7 (grupo de trabajo II/7 de la SociedadInternacional de Fotogrametría y Teledetección) de establecer un están-dar general para expresar la transformación de imagen a espacio-objetopara aplicaciones fotogramétricas y de teledetección. Mientras los mode-los fotogramétricos rigurosos garantizan una precisión definida, la apro-ximación por funciones racionales sólo permite un establecimiento másgeneral sobre la precisión esperada de los puntos extraídos de un par este-reoscópico.
Para seleccionar el método más apropiado para una aplicación con-creta, la precisión efectiva en la determinación de puntos ha sido com-probada en un proyecto común entre el Institut Cartogràfic de Catalunya
y la Fachhochschule Neubrandenburg. Escenas MOMS de zonas monta-ñosas y llanas se han utilizado en dicha comprobación, la cual se ha lle-vado a cabo a partir de varios programarios de ZI-Imaging.
Dada la orientación de imágenes utilizando un modelo fotogramétri-co riguroso, hay dos parámetros para escoger las funciones racionales queaproximen el modelo riguroso: el primero es el grado de las funcionesracionales y el segundo es el conjunto de puntos cuyas coordenadas sonconocidas a través del modelo riguroso, usadas en el cálculo de los coe-ficientes de las funciones racionales.
Los resultados se han comparado utilizando las funciones racionales(cambiando los parámetros para determinarlas) y el modelo riguroso; yse ha discutido la dependencia de las funciones racionales del terreno yde los parámetros de calibración.
Precisión potencial en la medición de puntos en imágenes MOMS usando un modelo riguroso y funciones racionalesRamon AlamúsInstitut Cartogràfic de [email protected]
Michael Langner, Wolfgang KresseFachhochschule Neubrandenburg, [email protected], [email protected]
Efecto de la semilla seleccionada.

Uno de los métodos que se utiliza con más frecuencia para la obtención de mapas de
usos del suelo es la clasificación supervisada deimágenes multiespectrales del satélite Landsat.No obstante, a menudo el resultado no es sufi-cientemente preciso para la mayoría de los pro-yectos prácticos de teledetección. Aunque seutilizen imágenes multitemporales para la cap-tura de la evolución fenológica de la vegetacióna lo largo del año, se produce un nivel consi-derablemente alto de incertidumbre en algunasde las categorías de la leyenda.
Pese a esto, es muy común disponer de unaserie de datos obtenidos en una área geográfi-ca determinada, ya que cualquier informaciónobtenida en diferentes momentos o por dife-rentes sensores es susceptible de utilización parala adquisición de clasificaciones desde distintastécnicas. Normalmente, cada fuente de datosdiferente es más adecuada para el estudio dediferentes características, como por ejemplo usosurbanos, vegetación, humedad, etc.
Llegados a este punto, se presenta la nece-sidad de obtener un método que combine lasdiferentes clasificaciones para extraer una nuevaque contenga las mejores características de cadauna de ellas. En este trabajo se presenta un algo-ritmo basado en la “Teoría de la Evidencia” quefusiona diferentes mapas de terreno obtenidosa partir de diversas fuentes y diferentes méto-dos de análisis.
Una clasificación supervisada proporcionauna distribución verosímil que nos indica laasignación probable de cada punto/píxel paracada una de las categorías de la leyenda. Conla utilización de algunas áreas de prueba, tam-bién se puede obtener una medida individualdel porcentaje de calidad de cada una de las
fuentes. El método que se presenta, consis-tente en fusionar dos clasificaciones diferen-tes de la misma área geográfica, se basa en lacombinación de sus verosimilitudes (probabi-lidades asignadas) y el nivel de calidad de laclasificación de cada fuente. Al combinarlasobtenemos la distribución de una nueva pro-babilidad asignada y, por esto, de una nuevaclasificación.
El comportamiento de este método y la mejo-ra que supone en los métodos de clasificaciónusuales se evalúan utilizando dos fuentes dedatos, aunque el método se podría extenderfácilmente e inmediatamente a diversas fuen-tes. Una de ellas es un grupo de imágenes mul-tiespectrales Landsat recogidas en dos estacionesdel año, con el que se obtiene una primera cla-sificación. La segunda fuente de datos es unaortofoto en blanco y negro con una resolucióna 2,5 punto/píxel, producida mediante foto-grafía aérea. Para utilizar la resolución espacialmás alta comparada con la del Landsat, se eje-cuta un análisis de texturas y así se obtiene delas bandas derivadas una segunda clasificación.Las verosimilitudes de asignación entre las dosclasificaciones se combinan utilizando un pesodiferente según el acierto de la clasificación ori-ginal. De esta manera se obtiene una nueva vero-similitud.
Si se calcula un nuevo nivel de acierto de estaclasificación final para evaluar su precisión, sealcanza un resultado superior al obtenido en lascategorías originales. Así, se puede llegar a laconclusión que la “Teoría de la Evidencia” pro-porciona un buen marco para combinar clasifi-caciones individuales obtenidas desde fuentesde datos diferentes, reteniendo lo mejor de cadauna de ellas.
En este artículo se considera el problema de segmentar parcelas que aparecen en las imágenes aéreas utilizando una generalización de
técnicas de “Crecimiento de Regiones” combinadas con modelos defor-mables. Esta aproximación combinada se llama “Competición entreRegiones”. Los modelos deformables son una generalización del méto-do de los Snakes para adaptar dinámicamente un contorno vectorial auna región de interés aplicando técnicas de minimización de energía.
Dado el problema de segmentación de parcelas, las técnicas de“Crecimiento de Regiones” nos interesan para obtener los parámetrosestadísticos de las regiones y dividir la imagen ráster en parcelas homo-géneas. La “Competición entre Regiones” combina las mejores calida-des de las técnicas de Snakes/Globus y “Crecimiento de Regiones”. Estealgoritmo se basa en una minimización de energía que dinámicamenteajusta los contornos de regiones dependiendo de los parámetros esta-dísticos que se van actualizando y de las condiciones impuestas a estoscontornos, como son mínima longitud y baja curvatura. A partir del hechode que técnicas ya existentes como los modelos de Snakes/Globus,“Crecimiento de Regiones” y Minimum Description Language (MDL) yatratan este problema desde distintos puntos de vista, en esta aproximaciónse combinan dentro de un marco estadístico común para tener las venta-jas de los tres métodos. Con esta estrategia, el hecho de preservar las carac-
terísticas topológicas de las parcelas guía y hace más robusto el proceso deagregación de píxeles de regiones homogéneas.
En la “Competición entre Regiones” cada área se modela por una dis-tribución estadística ya que algunas se agrupan para formar regionessiguiendo el criterio de homogeneidad en sus valores radiométricos.Una región se considera homogénea si sus valores de intensidad son con-sistentes al haber sido generados por una familia preespecificada de dis-tribuciones estadísticas, en nuestro caso la distribución “Normal”.
El proceso es iterativo y parte de una pequeña área circular alrededorde un punto inicial, dado por el operador, que se considera como el con-torno inicial y que también sirve para tener la primera aproximación de losparámetros estadísticos de la parcela. Partiendo de estos datos se creandos regiones R y S (donde S es la región complementaria de R) y se cal-culan las correspondientes probabilidades P(I | R) y P(I | S) (donde I es laimagen). El desplazamiento del contorno es determinante por la razónde similitud entre las dos regiones. La frontera entre las dos regiones semueve selectivamente a la imagen deformando la región R, dependiendo
de si las características de una pequeña área alrededor de cada punto dela frontera de R se aproximan más a P(I | R) o a P(I | S). Así, regiones adya-centes compiten por la propiedad de los píxeles a lo largo de sus fronte-ras, sujetas a las restricciones impuestas de suavidad de formas.
Dos son las fuerzas que actúan sobre el contorno de la región paraminimizar su energía: la fuerza externa que decide incluir/excluir un puntode la frontera de una región, como se ha descrito anteriormente, y la fuer-za interna donde se incorporan las condiciones que deberá cumplir elcontorno asegurando su suavidad en la evolución de su forma a lo largode las diferentes iteraciones para obtener una solución.
Para reducir el tiempo de proceso y para asegurar unos resultados másprecisos se han estudiado las características de los datos iniciales que entre-ga el operador. Además, se han comparado distintas inicializacionespara obtener una mejor estimación de los parámetros probabilísticos ini-ciales y para mejorar el rendimiento del proceso. Estudiando la conver-gencia del proceso en diferentes casos, se han desarrollado distintasestrategias para detener el proceso iterativo cuando se considera que seha obtenido una solución, una de éstas es la correlación de formas decontornos entre dos iteraciones consecutivas del proceso.
Para adaptar el algoritmo de “Competición entre Regiones” a nuestrasaplicaciones se ha extendido la aproximación mediante el uso de unaparametrización del contorno que utiliza B-Splines. Una de las razonespara seleccionar esta representación ha sido la fácil y compacta maneraque tiene para recoger la regularidad de las formas de las regiones. Otraventaja de los B-Splines es la rapidez del cálculo de sus derivadas, enton-ces las fuerzas internas, como la curvatura, se pueden introducir en elmodelo con un bajo coste. También se han desarrollado estrategias paracontrolar la aparición de lazadas y ayudar a la fuerza interna a mantenerla suavidad en la forma.
Nuestro objetivo ha sido recuperar la frontera de las parcelas que apa-recen en las fotografías aéreas de la manera más sencilla posible. Despuésde sospesar el beneficio del automatismo y el coste de la detección delos posibles errores de este proceso, se decidió desarrollar herramientassemiautomáticas. En nuestra aproximación el sistema es asistido por elusuario de dos maneras: primero, dando un punto dentro de la región asegmentar y, después, aceptando, rechazando o editando el resultadoobtenido, por esto ha sido integrado en un menú de edición donde ade-más se incorporan herramientas de tratamiento de un conjunto de con-tornos vectoriales.
El sistema se ha desarrollado en un entorno amigable para el usuario,se ha validado en numerosas imágenes aéreas y los algoritmos han sidoimplementados de manera que pueden ser fácilmente incorporados enun SIG.
La construcción de sistemas de programariopara producción masiva en lotes enlazan-
do múltiples programas (“factorías” en este con-texto) siempre ha sido una tarea difícil y pesada,que habitualmente deriva en la entrega de solu-ciones más bien inflexibles; además, se precisapersonal altamente cualificado, no sólo para cons-truir dichos sistemas sino también para explo-tarlos. Las razones que causan estas dificultadespueden agruparse de la siguiente manera:
Enlace. Combinar un conjunto de programaspara crear un determinado flujo de trabajoes una tarea donde aparecen dificultadestécnicas.
Cambio. Se piden nuevos productos; aparecenalgoritmos mejorados; es necesario tratarnuevos formatos de datos; por tanto, hayque mantener constantemente los sistemasexistentes o crear nuevos.
Complejidad. Sólo los expertos en un determi-nado dominio son capaces de establecercual es el flujo de trabajo correcto para obte-ner un determinado producto. Los inge-nieros de programario, habitualmente, noposeen este conocimiento, tan necesariopara construir el sistema perseguido.
Estos problemas conducen a sistemas rígi-dos, muy lejos de ser capaces de hacer frente
al desafío de la verdadera producción día a día.La Visual Factory Suite (VFS) para Windows NTes un conjunto de aplicaciones y estándarescreados en el Institut Cartogràfic de Catalunyaque se ha diseñado con la intención de resolvero, almenos, paliar estas dificultades.
El objetivo principal de la VFS puede ser enun-ciado como sigue: El ingeniero de producción (noel de programario) debe ser capaz de crear nue-
vas factorías por sí mismo y ponerlas en explota-ción en cuestión de minutos. Este objetivo se haalcanzado con la VFS 1.0, dado que con ella elingeniero de producción puede: 1) diseñar fac-torías de manera visual, 2) planificar la ejecu-ción de éstas para explotarlas de acuerdo conla disponibilidad de recursos existentes y, 3) de nuevo, de manera visual, monitorizar ycontrolar el proceso de producción.
HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
2 3HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
La comunidad fotogramétrica está aceptandorápidamente los nuevos avances en la inte-
gración GPS/INS, razón por la cual la georefe-renciación directa se está convirtiendo en unatécnica ampliamente utilizada.
No obstante, como esta técnica no compor-ta un control externo (o el control es en todo casoescaso), la robustez del posicionamiento cine-mático GPS se convierte en un aspecto crítico. Sepresenta una técnica para determinar la trayec-toria del GPS que saca partido de las redes regio-nales de GPS como una vía para mejorar lafiabilidad de las trayectorias basadas en GPS y, enconsecuencia, de la georeferenciación directa.
El incremento del número de redes per-manentes de GPS permite un posicionamien-
to cinemático diferencial que, en lugar de uti-lizar un único receptor GPS como estaciónde referencia, se sirve de todo el grupo dereceptores como red de referencia para el posi-cionamiento cinemático. La red permanenteGPS se utiliza para la generación de modelosatmosféricos a pequeña escala y para mini-mizar los errores orbitales y de multicaminode las señales GPS.
Los controles geométricos de la red GPSincrementan, por un lado, la robustez de losresultados y, paralelamente, mejoran la corre-lación entre los parámetros de ambigüedady los parámetros atmosféricos ayudando aconseguir una resolución de ambigüedadcorrecta.
Posicionamiento cinemático GPS robusto para la georeferenciación directa Julià TalayaInstitut Cartogràfic de [email protected]
Ejemplo de ortofoto obtenida por fotografía aérea pancromática.
Semillas y contornos resultantes aplicandola parametrización por B-Splines.
Diseño visual de una factoría.
Parcelas obtenidas con un 60%más de rapidez que cuando sedibujan manualmente y con unaprecisión de subpíxel.
Imagen de textura en falso color.
Clasificación final obtenida usando la “Teoría de la Evidencia”.
Producción de mapas del suelo mediante la fusión de la clasificación multiespectral de imágenes Landsat y el análisis de textura de imágenes de alta resoluciónXavier Otazu, Roman ArbiolInstitut Cartogràfic de [email protected], [email protected]
Extracción de parcelas de imágenes aéreas utilizando “Competición entre Regiones”Margarita TorreInstitut Cartogràfic de Catalunya – [email protected]
Petia RadevaCentre de Visió per Computador. Universitat Autònoma de Barcelona, España – [email protected]
La Visual Factory Suite.Haciendo frente a los requerimientos cambiantes de los sistemas de producciónmasiva en entornos de proceso de datosespaciales
Dr. José NavarroInstitut Cartogràfic de [email protected]
El estudio de precisión potencial en la medición de puntos en imáge-nes MOMS usando un modelo riguroso y funciones racionales empe-
zó por la iniciativa del ISPRS.WGII/7 (grupo de trabajo II/7 de la SociedadInternacional de Fotogrametría y Teledetección) de establecer un están-dar general para expresar la transformación de imagen a espacio-objetopara aplicaciones fotogramétricas y de teledetección. Mientras los mode-los fotogramétricos rigurosos garantizan una precisión definida, la apro-ximación por funciones racionales sólo permite un establecimiento másgeneral sobre la precisión esperada de los puntos extraídos de un par este-reoscópico.
Para seleccionar el método más apropiado para una aplicación con-creta, la precisión efectiva en la determinación de puntos ha sido com-probada en un proyecto común entre el Institut Cartogràfic de Catalunya
y la Fachhochschule Neubrandenburg. Escenas MOMS de zonas monta-ñosas y llanas se han utilizado en dicha comprobación, la cual se ha lle-vado a cabo a partir de varios programarios de ZI-Imaging.
Dada la orientación de imágenes utilizando un modelo fotogramétri-co riguroso, hay dos parámetros para escoger las funciones racionales queaproximen el modelo riguroso: el primero es el grado de las funcionesracionales y el segundo es el conjunto de puntos cuyas coordenadas sonconocidas a través del modelo riguroso, usadas en el cálculo de los coe-ficientes de las funciones racionales.
Los resultados se han comparado utilizando las funciones racionales(cambiando los parámetros para determinarlas) y el modelo riguroso; yse ha discutido la dependencia de las funciones racionales del terreno yde los parámetros de calibración.
Precisión potencial en la medición de puntos en imágenes MOMS usando un modelo riguroso y funciones racionalesRamon AlamúsInstitut Cartogràfic de [email protected]
Michael Langner, Wolfgang KresseFachhochschule Neubrandenburg, [email protected], [email protected]
Efecto de la semilla seleccionada.

Uno de los métodos que se utiliza con más frecuencia para la obtención de mapas de
usos del suelo es la clasificación supervisada deimágenes multiespectrales del satélite Landsat.No obstante, a menudo el resultado no es sufi-cientemente preciso para la mayoría de los pro-yectos prácticos de teledetección. Aunque seutilizen imágenes multitemporales para la cap-tura de la evolución fenológica de la vegetacióna lo largo del año, se produce un nivel consi-derablemente alto de incertidumbre en algunasde las categorías de la leyenda.
Pese a esto, es muy común disponer de unaserie de datos obtenidos en una área geográfi-ca determinada, ya que cualquier informaciónobtenida en diferentes momentos o por dife-rentes sensores es susceptible de utilización parala adquisición de clasificaciones desde distintastécnicas. Normalmente, cada fuente de datosdiferente es más adecuada para el estudio dediferentes características, como por ejemplo usosurbanos, vegetación, humedad, etc.
Llegados a este punto, se presenta la nece-sidad de obtener un método que combine lasdiferentes clasificaciones para extraer una nuevaque contenga las mejores características de cadauna de ellas. En este trabajo se presenta un algo-ritmo basado en la “Teoría de la Evidencia” quefusiona diferentes mapas de terreno obtenidosa partir de diversas fuentes y diferentes méto-dos de análisis.
Una clasificación supervisada proporcionauna distribución verosímil que nos indica laasignación probable de cada punto/píxel paracada una de las categorías de la leyenda. Conla utilización de algunas áreas de prueba, tam-bién se puede obtener una medida individualdel porcentaje de calidad de cada una de las
fuentes. El método que se presenta, consis-tente en fusionar dos clasificaciones diferen-tes de la misma área geográfica, se basa en lacombinación de sus verosimilitudes (probabi-lidades asignadas) y el nivel de calidad de laclasificación de cada fuente. Al combinarlasobtenemos la distribución de una nueva pro-babilidad asignada y, por esto, de una nuevaclasificación.
El comportamiento de este método y la mejo-ra que supone en los métodos de clasificaciónusuales se evalúan utilizando dos fuentes dedatos, aunque el método se podría extenderfácilmente e inmediatamente a diversas fuen-tes. Una de ellas es un grupo de imágenes mul-tiespectrales Landsat recogidas en dos estacionesdel año, con el que se obtiene una primera cla-sificación. La segunda fuente de datos es unaortofoto en blanco y negro con una resolucióna 2,5 punto/píxel, producida mediante foto-grafía aérea. Para utilizar la resolución espacialmás alta comparada con la del Landsat, se eje-cuta un análisis de texturas y así se obtiene delas bandas derivadas una segunda clasificación.Las verosimilitudes de asignación entre las dosclasificaciones se combinan utilizando un pesodiferente según el acierto de la clasificación ori-ginal. De esta manera se obtiene una nueva vero-similitud.
Si se calcula un nuevo nivel de acierto de estaclasificación final para evaluar su precisión, sealcanza un resultado superior al obtenido en lascategorías originales. Así, se puede llegar a laconclusión que la “Teoría de la Evidencia” pro-porciona un buen marco para combinar clasifi-caciones individuales obtenidas desde fuentesde datos diferentes, reteniendo lo mejor de cadauna de ellas.
En este artículo se considera el problema de segmentar parcelas que aparecen en las imágenes aéreas utilizando una generalización de
técnicas de “Crecimiento de Regiones” combinadas con modelos defor-mables. Esta aproximación combinada se llama “Competición entreRegiones”. Los modelos deformables son una generalización del méto-do de los Snakes para adaptar dinámicamente un contorno vectorial auna región de interés aplicando técnicas de minimización de energía.
Dado el problema de segmentación de parcelas, las técnicas de“Crecimiento de Regiones” nos interesan para obtener los parámetrosestadísticos de las regiones y dividir la imagen ráster en parcelas homo-géneas. La “Competición entre Regiones” combina las mejores calida-des de las técnicas de Snakes/Globus y “Crecimiento de Regiones”. Estealgoritmo se basa en una minimización de energía que dinámicamenteajusta los contornos de regiones dependiendo de los parámetros esta-dísticos que se van actualizando y de las condiciones impuestas a estoscontornos, como son mínima longitud y baja curvatura. A partir del hechode que técnicas ya existentes como los modelos de Snakes/Globus,“Crecimiento de Regiones” y Minimum Description Language (MDL) yatratan este problema desde distintos puntos de vista, en esta aproximaciónse combinan dentro de un marco estadístico común para tener las venta-jas de los tres métodos. Con esta estrategia, el hecho de preservar las carac-
terísticas topológicas de las parcelas guía y hace más robusto el proceso deagregación de píxeles de regiones homogéneas.
En la “Competición entre Regiones” cada área se modela por una dis-tribución estadística ya que algunas se agrupan para formar regionessiguiendo el criterio de homogeneidad en sus valores radiométricos.Una región se considera homogénea si sus valores de intensidad son con-sistentes al haber sido generados por una familia preespecificada de dis-tribuciones estadísticas, en nuestro caso la distribución “Normal”.
El proceso es iterativo y parte de una pequeña área circular alrededorde un punto inicial, dado por el operador, que se considera como el con-torno inicial y que también sirve para tener la primera aproximación de losparámetros estadísticos de la parcela. Partiendo de estos datos se creandos regiones R y S (donde S es la región complementaria de R) y se cal-culan las correspondientes probabilidades P(I | R) y P(I | S) (donde I es laimagen). El desplazamiento del contorno es determinante por la razónde similitud entre las dos regiones. La frontera entre las dos regiones semueve selectivamente a la imagen deformando la región R, dependiendo
de si las características de una pequeña área alrededor de cada punto dela frontera de R se aproximan más a P(I | R) o a P(I | S). Así, regiones adya-centes compiten por la propiedad de los píxeles a lo largo de sus fronte-ras, sujetas a las restricciones impuestas de suavidad de formas.
Dos son las fuerzas que actúan sobre el contorno de la región paraminimizar su energía: la fuerza externa que decide incluir/excluir un puntode la frontera de una región, como se ha descrito anteriormente, y la fuer-za interna donde se incorporan las condiciones que deberá cumplir elcontorno asegurando su suavidad en la evolución de su forma a lo largode las diferentes iteraciones para obtener una solución.
Para reducir el tiempo de proceso y para asegurar unos resultados másprecisos se han estudiado las características de los datos iniciales que entre-ga el operador. Además, se han comparado distintas inicializacionespara obtener una mejor estimación de los parámetros probabilísticos ini-ciales y para mejorar el rendimiento del proceso. Estudiando la conver-gencia del proceso en diferentes casos, se han desarrollado distintasestrategias para detener el proceso iterativo cuando se considera que seha obtenido una solución, una de éstas es la correlación de formas decontornos entre dos iteraciones consecutivas del proceso.
Para adaptar el algoritmo de “Competición entre Regiones” a nuestrasaplicaciones se ha extendido la aproximación mediante el uso de unaparametrización del contorno que utiliza B-Splines. Una de las razonespara seleccionar esta representación ha sido la fácil y compacta maneraque tiene para recoger la regularidad de las formas de las regiones. Otraventaja de los B-Splines es la rapidez del cálculo de sus derivadas, enton-ces las fuerzas internas, como la curvatura, se pueden introducir en elmodelo con un bajo coste. También se han desarrollado estrategias paracontrolar la aparición de lazadas y ayudar a la fuerza interna a mantenerla suavidad en la forma.
Nuestro objetivo ha sido recuperar la frontera de las parcelas que apa-recen en las fotografías aéreas de la manera más sencilla posible. Despuésde sospesar el beneficio del automatismo y el coste de la detección delos posibles errores de este proceso, se decidió desarrollar herramientassemiautomáticas. En nuestra aproximación el sistema es asistido por elusuario de dos maneras: primero, dando un punto dentro de la región asegmentar y, después, aceptando, rechazando o editando el resultadoobtenido, por esto ha sido integrado en un menú de edición donde ade-más se incorporan herramientas de tratamiento de un conjunto de con-tornos vectoriales.
El sistema se ha desarrollado en un entorno amigable para el usuario,se ha validado en numerosas imágenes aéreas y los algoritmos han sidoimplementados de manera que pueden ser fácilmente incorporados enun SIG.
La construcción de sistemas de programariopara producción masiva en lotes enlazan-
do múltiples programas (“factorías” en este con-texto) siempre ha sido una tarea difícil y pesada,que habitualmente deriva en la entrega de solu-ciones más bien inflexibles; además, se precisapersonal altamente cualificado, no sólo para cons-truir dichos sistemas sino también para explo-tarlos. Las razones que causan estas dificultadespueden agruparse de la siguiente manera:
Enlace. Combinar un conjunto de programaspara crear un determinado flujo de trabajoes una tarea donde aparecen dificultadestécnicas.
Cambio. Se piden nuevos productos; aparecenalgoritmos mejorados; es necesario tratarnuevos formatos de datos; por tanto, hayque mantener constantemente los sistemasexistentes o crear nuevos.
Complejidad. Sólo los expertos en un determi-nado dominio son capaces de establecercual es el flujo de trabajo correcto para obte-ner un determinado producto. Los inge-nieros de programario, habitualmente, noposeen este conocimiento, tan necesariopara construir el sistema perseguido.
Estos problemas conducen a sistemas rígi-dos, muy lejos de ser capaces de hacer frente
al desafío de la verdadera producción día a día.La Visual Factory Suite (VFS) para Windows NTes un conjunto de aplicaciones y estándarescreados en el Institut Cartogràfic de Catalunyaque se ha diseñado con la intención de resolvero, almenos, paliar estas dificultades.
El objetivo principal de la VFS puede ser enun-ciado como sigue: El ingeniero de producción (noel de programario) debe ser capaz de crear nue-
vas factorías por sí mismo y ponerlas en explota-ción en cuestión de minutos. Este objetivo se haalcanzado con la VFS 1.0, dado que con ella elingeniero de producción puede: 1) diseñar fac-torías de manera visual, 2) planificar la ejecu-ción de éstas para explotarlas de acuerdo conla disponibilidad de recursos existentes y, 3) de nuevo, de manera visual, monitorizar ycontrolar el proceso de producción.
HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
2 3HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
La comunidad fotogramétrica está aceptandorápidamente los nuevos avances en la inte-
gración GPS/INS, razón por la cual la georefe-renciación directa se está convirtiendo en unatécnica ampliamente utilizada.
No obstante, como esta técnica no compor-ta un control externo (o el control es en todo casoescaso), la robustez del posicionamiento cine-mático GPS se convierte en un aspecto crítico. Sepresenta una técnica para determinar la trayec-toria del GPS que saca partido de las redes regio-nales de GPS como una vía para mejorar lafiabilidad de las trayectorias basadas en GPS y, enconsecuencia, de la georeferenciación directa.
El incremento del número de redes per-manentes de GPS permite un posicionamien-
to cinemático diferencial que, en lugar de uti-lizar un único receptor GPS como estaciónde referencia, se sirve de todo el grupo dereceptores como red de referencia para el posi-cionamiento cinemático. La red permanenteGPS se utiliza para la generación de modelosatmosféricos a pequeña escala y para mini-mizar los errores orbitales y de multicaminode las señales GPS.
Los controles geométricos de la red GPSincrementan, por un lado, la robustez de losresultados y, paralelamente, mejoran la corre-lación entre los parámetros de ambigüedady los parámetros atmosféricos ayudando aconseguir una resolución de ambigüedadcorrecta.
Posicionamiento cinemático GPS robusto para la georeferenciación directa Julià TalayaInstitut Cartogràfic de [email protected]
Ejemplo de ortofoto obtenida por fotografía aérea pancromática.
Semillas y contornos resultantes aplicandola parametrización por B-Splines.
Diseño visual de una factoría.
Parcelas obtenidas con un 60%más de rapidez que cuando sedibujan manualmente y con unaprecisión de subpíxel.
Imagen de textura en falso color.
Clasificación final obtenida usando la “Teoría de la Evidencia”.
Producción de mapas del suelo mediante la fusión de la clasificación multiespectral de imágenes Landsat y el análisis de textura de imágenes de alta resoluciónXavier Otazu, Roman ArbiolInstitut Cartogràfic de [email protected], [email protected]
Extracción de parcelas de imágenes aéreas utilizando “Competición entre Regiones”Margarita TorreInstitut Cartogràfic de Catalunya – [email protected]
Petia RadevaCentre de Visió per Computador. Universitat Autònoma de Barcelona, España – [email protected]
La Visual Factory Suite.Haciendo frente a los requerimientos cambiantes de los sistemas de producciónmasiva en entornos de proceso de datosespaciales
Dr. José NavarroInstitut Cartogràfic de [email protected]
El estudio de precisión potencial en la medición de puntos en imáge-nes MOMS usando un modelo riguroso y funciones racionales empe-
zó por la iniciativa del ISPRS.WGII/7 (grupo de trabajo II/7 de la SociedadInternacional de Fotogrametría y Teledetección) de establecer un están-dar general para expresar la transformación de imagen a espacio-objetopara aplicaciones fotogramétricas y de teledetección. Mientras los mode-los fotogramétricos rigurosos garantizan una precisión definida, la apro-ximación por funciones racionales sólo permite un establecimiento másgeneral sobre la precisión esperada de los puntos extraídos de un par este-reoscópico.
Para seleccionar el método más apropiado para una aplicación con-creta, la precisión efectiva en la determinación de puntos ha sido com-probada en un proyecto común entre el Institut Cartogràfic de Catalunya
y la Fachhochschule Neubrandenburg. Escenas MOMS de zonas monta-ñosas y llanas se han utilizado en dicha comprobación, la cual se ha lle-vado a cabo a partir de varios programarios de ZI-Imaging.
Dada la orientación de imágenes utilizando un modelo fotogramétri-co riguroso, hay dos parámetros para escoger las funciones racionales queaproximen el modelo riguroso: el primero es el grado de las funcionesracionales y el segundo es el conjunto de puntos cuyas coordenadas sonconocidas a través del modelo riguroso, usadas en el cálculo de los coe-ficientes de las funciones racionales.
Los resultados se han comparado utilizando las funciones racionales(cambiando los parámetros para determinarlas) y el modelo riguroso; yse ha discutido la dependencia de las funciones racionales del terreno yde los parámetros de calibración.
Precisión potencial en la medición de puntos en imágenes MOMS usando un modelo riguroso y funciones racionalesRamon AlamúsInstitut Cartogràfic de [email protected]
Michael Langner, Wolfgang KresseFachhochschule Neubrandenburg, [email protected], [email protected]
Efecto de la semilla seleccionada.

El Servicio Autónomo de Geografía y Carto-grafía Nacional de Venezuela ha alcanzado
el desafío de elaborar la cartografía de la regiónsituada entre el río Orinoco y la frontera conBrasil. Esta remota región venezolana, casi per-manentemente nublada, se caracteriza por suclima cálido y húmedo. La topografía de estaregión es accidentada, con escasas áreas llanasy abruptas elevaciones que emergen desde lasllanuras. Su superficie se encuentra casi com-pletamente cubierta por selva tropical, con árbo-les de alturas de hasta 40 m.
Este proyecto cartográfico consistió en la pro-ducción de imágenes de ortofoto digital de 5 m/píxel y de mapas de ortofoto a escala1:50 000, con curvas cada 40 m derivadas deun modelo digital de elevaciones muy densosobre una región de 266 616 km2. Un total de536 hojas recubren el área de referencia.
El Institut Cartogràfic de Catalunya presentóuna propuesta técnica basada en la tecnologíainterferométrica SAR para asegurar que los pro-ductos se obtendrían y se entregarían en unperíodo previsible de tiempo. Dada la precisiónnecesaria y las especificaciones de la medida delpunto/píxel, se excluyó el uso del satélite radar,y se propuso y se selecció la utilización del radarinterferométrico aerotransportado de paso únicoAeS-1 de la empresa AeroSensing Radarsysteme,GmbH.
El sistema AeS-1 se basa en la información GPSe INS para la georeferenciación, por esto el con-trol sobre el terreno se utiliza sólo con propósi-tos de comprobación. Los puntos de control sepueden visualizar desde la imagen del radarmediante la instalación de reflectores de radar(corner reflectors) en posiciones conocidas.Finalmente, se estableció la situación sobre el terre-no y sobre la imagen del radar de 35 reflectores.
La campaña de vuelo se llevó a cabo entre el28 de octubre de 1998 y el 3 de febrero de 1999,con un total de 66 días de vuelo efectivo.
El primer paso del proceso consistió en pro-cesar la reconstrucción de dos imágenes com-plejas (intensidad y fase) a partir de los datosen bruto de dos antenas. Elinterferograma, que se ob-tiene multiplicando la prime-ra imagen con el conjugadocomplejo de la segunda,representa la diferencia defase dada la elevación delterreno y se expresa enmódulo 2π. El proceso de“desenrollar” la diferenciade fase se obtiene calculan-do la diferencia absoluta defase sumando (o restando)2π cuando se detecta unavariación más grande que2π en el interferograma.Entonces se calculan las ele-vaciones desde la fase abso-luta una vez ésta se hacalibrado. Una vez se cono-cen las elevaciones, se pro-cede a la geocorrección ymontaje de las imágenescorrespondientes a las di-ferentes líneas de vuelo mediante un proceso demosaico.
Para obtener una estima-ción de la altura de los árbo-les y para convertir el ModeloDigital de Superficie (DSM)en un Modelo Digital delTerreno (DTM) se utiliza una
cobertura de imágenes del satélite Landsat prác-ticamente libre de nubes. Después de corregis-trar con las imágenes de radar, las escenas sesegmentan utilizando un clasificador máximoverosímil. Las diferencias de altura entre las cate-gorías adyacentes se obtienen dibujando perfi-les a través de ellas y así es posible extraer lasalturas desde el DSM. El resultado es un cuadroque indica la diferencia media de altura paracada tipo de transición entre las categorías. Lacategoría del suelo se utiliza como referencia,y las alturas se restan del DSM obteniendo asíel DTM. Las categorías se derivan de las textu-ras de las imágenes de radar en los lugares dondelas escenas del Landsat se encuentran recu-biertas de nubes.
Llegados a este punto, las curvas de nivel secalculan automáticamente y se suprimen losmínimos locales. Los nombres geográficos seextraen de mapas existentes y se fijan en el mapa.Finalmente, una vez incorporados cuadros,leyendas y márgenes, se filma y se imprime elmapa.
Probablemente, la conclusión más relevantees que el radar interferométrico aerotranspor-tado de paso único representa un instrumentofiable para misiones de cartografía en áreas carac-terizadas por la alta nubosidad. Por otro lado, serequiere un período de tiempo considerable paraprocesar los datos de radar. Comparativamente,la cantidad de maquinario y tiempo necesarioses muy superior al que supondría una misiónóptica equivalente.
4
El Institut Cartogràfic de Catalunya ha de-sarrollado un sistema SISA (Sistema
Integrado de Sensores Aerotransportados) queintegra sensores aerotransportados (de imagen,de posición, de actitud, etc.) y algoritmos quese pueden usar para georeferenciar sensores deimagen. Hasta ahora el SISA se ha utilizado paraorientar el sistema CASI (Compact Airborne Spec-
tographic Imager) y en un vuelo gravimétricosobre Cataluña.
El objetivo principal del SISA es proporcio-nar, a un sensor de imagen, actitud y posiciónprecisa. Para llevar a cabo esta tarea, el SISA inte-gra datos GPS (Global Positioning System) y datosde una IMU (Inertial Measurement Unit), y dis-pone de un procedimiento de sincronización deconjunto de todos los sensores. La configura-ción actual del SISA proporciona una interficieal subsistema de actitud (basado en un INS LittonLTN 101 FLAGSHIP –Inercial Navigation System–),una interficie a un receptor GPS de doble fre-cuencia y un procedimiento robusto para sin-cronizar el sensor de actitud (IMU/INS) y elsensor de imagen (CASI). El ICC ha desarrolla-do el programario para asegurar la correcta asig-nación de tiempo a los datos inerciales y a las
imágenes, y determinar la trayectoria y actitudde la plataforma aerotransportada.
Las diferencias entre el sistema de referen-cia imagen y el sistema de referencia inercialcausadas por el montaje de los sensores sondeterminadas conjuntamente con ciertos pará-metros de calibración del CASI en un ajuste foto-gramétrico usando el programario GeoTeX/ACX.
Los métodos de orientación directa requierenun buen conocimiento a priori de las relacionesgeométricas entre los sensores involucrados. Laestabilidad del acoplamiento SISA-CASI se haestudiado comparando los parámetros de matri-ces de desalineamiento y autocalibración enseries de vuelos CASI.
A modo de conclusión, el SISA demuestra suvalidez para la orientación directa del sistemaCASI.
La base de datos altimétrica en malla regularque tiene el Institut Cartogràfic de Catalunya
desde 1987 es insuficiente para algunas aplica-ciones. Por esta razón se inició el desarrollo deuna nueva base de datos con la intención deconstruir un modelo irregular de triángulos (TIN)de una sola pieza con precisión suficiente paragenerar curvas de nivel de calidad cartográfica
para escalas 1:5 000 o mayores y para todaCataluña (32 000 km2).
Se prevé cargar en la base aproximadamente300 millones de puntos. El modelo debe serdinámico para permitir la inserción y el borra-do de datos, el modelo de superficie debe serrefinable, los algoritmos han de ser robustosy se debe preservar la integridad de los datos.La triangulación escogida es la triangulaciónrestringida de Delaunay y se utiliza el algorit-mo de construcción incremental. Su rendi-miento es bueno cuando los datos de entrada
están bien distribuidos y es completamentedinámico.
La dificultad principal es el manejo de la trian-gulación con memoria externa. Los programashabituales de triangulación mantienen toda lainformación en la memoria central y no puedentriangular conjuntos de datos muy grandes (algu-nos millones de vértices). En este proyecto se
emplea un árbol cuaternario de bloques de pun-tos con regiones (bucket point-region quadtree)para mejorar la localización del triángulo que con-tiene un punto y para reducir los fallos de pági-na mediante agrupación en bloques (buckets).
El modelo de superficie es por defecto unterreno poliédrico pero se puede extender dediferentes maneras. El uso de la tecnología deprogramación orientada al objeto significa queestas extensiones pueden ser programadasfácilmente y proporciona al diseño una granflexibilidad.
HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
1
HOJAINFORMATIVAI N S T I T U T C A R T O G R À F I C D E C A T A L U N Y A
A Ñ O 5 � J U N I O 2 0 0 0 � N Ú M E R O 1 1
SUMARIOContribución del ICC en el XIX Congreso de la ISPRS:
Integración de sensores aerotransportados y orientación directa del CASI
Posicionamiento cinemático GPS robusto para la georeferenciación directa
La Visual Factory Suite. Haciendo frente a los requerimientos cambiantes de los sistemas de producción masiva en entornos de proceso de datos espaciales
Extracción de parcelas de imágenes aéreas utilizando “Competición entre Regiones”
Producción de mapas del suelo mediante la fusión de la clasificación multiespectral de imágenes Landsaty el análisis de textura de imágenes de alta resolución
Precisión potencial en la medición de puntos en imágenes MOMS usando un modelo riguroso y funciones racionales
La producción cartográfica en Venezuela utilizando InSAR aerotransportado
Una base de datos altimétrica TIN para todo un país
Los mapas en la historia de la cartografía del siglo XX
Premio a la mejor comunicación
Premio “Jordi Viñas i Folch”
Generalitat de CatalunyaInstitut Cartogràficde Catalunya
Esta hoja es una publicación gratuita disponible en catalán, castellanoe inglés.
Año 5 – Junio 2000 – Número 11 – ISSN: 1137-2389Depósito Legal: B. 39 884-1996
4HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
BREVESLOS MAPAS EN LA HISTORIA DE LA CARTOGRAFÍA DELSIGLO XX
El proyecto del ICC sobre el estudio de laevolución y la influencia de las coleccionesde mapas en la historia de la cartografía delsiglo XX ha sido admitido en un programade investigación de tres años de duraciónfinanciado por la National ScienceFoundation de los EUA.
La propuesta forma parte de los traba-jos efectuados para la elaboración del volu-men 6 de la History of Cartography, editadapor la Universidad de Chicago bajo la direc-ción del profesor David Woodward. Estevolumen trata precisamente de la carto-grafía del siglo XX y es coeditado por el pro-fesor Mark Monmonier.
PREMIO A LA MEJOR COMUNICACIÓN
Durante la celebración, el pasado sep-tiembre de 1999, del 12th InternationalTechnical Meeting of The Satellite Divisiondel Institute of Navigation de Nashville(Tennessee), se otorgó el premio a la mejorcomunicación presentada en la sesiónCarrier-Phase Positioning & AmbiguityResolution: “Resolving Carrier-Phase Ambi-guities On-The-Fly, At More Than 100 kmFrom Nearest Reference Site, With Help FromIonospheric Tomography”, pronunciada porO. L. Colombo (USRA/NASA GSFC), M. Her-nandez-Pajares, J. M. Juan y J. Sanz (Univer-sitat Politècnica de Catalunya) y Julià Talaya(Institut Cartogràfic de Catalunya).
Enhorabuena!
PREMIO “JORDI VIÑAS I FOLCH”
Coincidiendo con las sucesivas celebra-ciones bienales de la Semana Geomática deBarcelona, el ICC convoca el premio “JordiViñas i Folch” a un trabajo individual deinvestigación inédito en el campo de la geo-mática.
Durante la celebración de la 4a Semana,los días 3-6 de abril de 2000, organizada porel Institut de Geomàtica, el Institut Carto-gràfic de Catalunya, el Col·legi Oficial d’Engi-nyers Tècnics en Topografia (división deCataluña) y la Escola Universitària Politècnicade Barcelona, el jurado otorgó el premio altrabajo de investigación: “Nuevas tecnolo-gías para el establecimiento de servicios decorrecciones diferenciales GPS”, de ErnestBosch (ICC).
Enhorabuena!
Direcciones de contacto del ICC
Parc de Montjuïc – E-08038 Barcelona – Teléfono 34-93 567 15 00 – Telefax 93 567 15 67 – E-mail: [email protected]
Balmes, 209-211 – E-08006 Barcelona – Teléfono 34-93 218 87 58 – Telefax 93 218 89 59Emili Grahit, 10 A – E-17002 Girona – Teléfono 34-972 20 04 93 – Telefax 972 20 04 93Doctor Fleming, 19 – E-25006 Lleida – Teléfono 34-973 27 47 76 – Telefax 973 27 47 76Anselm Clavé, 1 – E-43004 Tarragona – Teléfono 34-977 23 01 56 – Telefax 977 23 01 56
© Institut Cartogràfic de Catalunya
PAPER ECOLÒGIC
http://www.icc.es
CONTRIBUCIÓN DEL ICC EN EL XIX CONGRESO DE LA ISPRS
Integración de sensores aerotransportados y orientación directa del CASIRamon Alamús, Julià TalayaInstitut Cartogràfic de Catalunya – [email protected], [email protected]
Los días 16-23 de julio de 2000 se celebrará en Amsterdam el XIXCongreso de la Sociedad Internacional de Fotogrametría y
Teledetección. Al igual que en las anteriores celebraciones, la participa-ción del Institut Cartogràfic de Catalunya estará muy presente porquepresentará cinco pósters, tres comunicaciones y un tutorial. Cada una deestas contribuciones se presenta, de manera resumida, en este númerode la Hoja informativa del ICC aunque, una vez celebrado el Congreso,se publicarán ampliadas en la Web del ICC:
Esta celebración, además, tiene un valor añadido: la Sociedad Españolade Cartografía, Fotogrametría y Teledetección, sociedad que reúne y repre-senta las entidades españolas dedicadas a estas especialidades, presenta-rá su candidatura para que el ICC acoja el XX Congreso de la ISPRS, quese celebrará en el año 2004.
Cabe esperar que esta propuesta tenga la resonancia que todos desea-mos y que Barcelona, una vez más, sea la sede de un acontecimiento inter-nacional que tiene como objetivos la reunión de los más prestigiosostécnicos sobre cartografía, fotogrametría y teledetección, y la puesta encomún de las experiencias y de los nuevos conocimientos que se van des-arrollando y aplicando en estos campos.
La producción cartográfica en Venezuela utilizando InSAR aerotransportadoRoman ArbiolInstitut Cartogràfic de Catalunya – [email protected]
Gloria GonzálezServicio Autónomo de Geografía y Cartografía Nacional, Caracas, Venezuela – [email protected]
Una base de datos altimétrica TIN para todo un paísAntonio RuizInstitut Cartogràfic de [email protected]
Imagen geocodificada después de la corrección radiométrica.
El Servicio Autónomo de Geografía y Carto-grafía Nacional de Venezuela ha alcanzado
el desafío de elaborar la cartografía de la regiónsituada entre el río Orinoco y la frontera conBrasil. Esta remota región venezolana, casi per-manentemente nublada, se caracteriza por suclima cálido y húmedo. La topografía de estaregión es accidentada, con escasas áreas llanasy abruptas elevaciones que emergen desde lasllanuras. Su superficie se encuentra casi com-pletamente cubierta por selva tropical, con árbo-les de alturas de hasta 40 m.
Este proyecto cartográfico consistió en la pro-ducción de imágenes de ortofoto digital de 5 m/píxel y de mapas de ortofoto a escala1:50 000, con curvas cada 40 m derivadas deun modelo digital de elevaciones muy densosobre una región de 266 616 km2. Un total de536 hojas recubren el área de referencia.
El Institut Cartogràfic de Catalunya presentóuna propuesta técnica basada en la tecnologíainterferométrica SAR para asegurar que los pro-ductos se obtendrían y se entregarían en unperíodo previsible de tiempo. Dada la precisiónnecesaria y las especificaciones de la medida delpunto/píxel, se excluyó el uso del satélite radar,y se propuso y se selecció la utilización del radarinterferométrico aerotransportado de paso únicoAeS-1 de la empresa AeroSensing Radarsysteme,GmbH.
El sistema AeS-1 se basa en la información GPSe INS para la georeferenciación, por esto el con-trol sobre el terreno se utiliza sólo con propósi-tos de comprobación. Los puntos de control sepueden visualizar desde la imagen del radarmediante la instalación de reflectores de radar(corner reflectors) en posiciones conocidas.Finalmente, se estableció la situación sobre el terre-no y sobre la imagen del radar de 35 reflectores.
La campaña de vuelo se llevó a cabo entre el28 de octubre de 1998 y el 3 de febrero de 1999,con un total de 66 días de vuelo efectivo.
El primer paso del proceso consistió en pro-cesar la reconstrucción de dos imágenes com-plejas (intensidad y fase) a partir de los datosen bruto de dos antenas. Elinterferograma, que se ob-tiene multiplicando la prime-ra imagen con el conjugadocomplejo de la segunda,representa la diferencia defase dada la elevación delterreno y se expresa enmódulo 2π. El proceso de“desenrollar” la diferenciade fase se obtiene calculan-do la diferencia absoluta defase sumando (o restando)2π cuando se detecta unavariación más grande que2π en el interferograma.Entonces se calculan las ele-vaciones desde la fase abso-luta una vez ésta se hacalibrado. Una vez se cono-cen las elevaciones, se pro-cede a la geocorrección ymontaje de las imágenescorrespondientes a las di-ferentes líneas de vuelo mediante un proceso demosaico.
Para obtener una estima-ción de la altura de los árbo-les y para convertir el ModeloDigital de Superficie (DSM)en un Modelo Digital delTerreno (DTM) se utiliza una
cobertura de imágenes del satélite Landsat prác-ticamente libre de nubes. Después de corregis-trar con las imágenes de radar, las escenas sesegmentan utilizando un clasificador máximoverosímil. Las diferencias de altura entre las cate-gorías adyacentes se obtienen dibujando perfi-les a través de ellas y así es posible extraer lasalturas desde el DSM. El resultado es un cuadroque indica la diferencia media de altura paracada tipo de transición entre las categorías. Lacategoría del suelo se utiliza como referencia,y las alturas se restan del DSM obteniendo asíel DTM. Las categorías se derivan de las textu-ras de las imágenes de radar en los lugares dondelas escenas del Landsat se encuentran recu-biertas de nubes.
Llegados a este punto, las curvas de nivel secalculan automáticamente y se suprimen losmínimos locales. Los nombres geográficos seextraen de mapas existentes y se fijan en el mapa.Finalmente, una vez incorporados cuadros,leyendas y márgenes, se filma y se imprime elmapa.
Probablemente, la conclusión más relevantees que el radar interferométrico aerotranspor-tado de paso único representa un instrumentofiable para misiones de cartografía en áreas carac-terizadas por la alta nubosidad. Por otro lado, serequiere un período de tiempo considerable paraprocesar los datos de radar. Comparativamente,la cantidad de maquinario y tiempo necesarioses muy superior al que supondría una misiónóptica equivalente.
4
El Institut Cartogràfic de Catalunya ha de-sarrollado un sistema SISA (Sistema
Integrado de Sensores Aerotransportados) queintegra sensores aerotransportados (de imagen,de posición, de actitud, etc.) y algoritmos quese pueden usar para georeferenciar sensores deimagen. Hasta ahora el SISA se ha utilizado paraorientar el sistema CASI (Compact Airborne Spec-
tographic Imager) y en un vuelo gravimétricosobre Cataluña.
El objetivo principal del SISA es proporcio-nar, a un sensor de imagen, actitud y posiciónprecisa. Para llevar a cabo esta tarea, el SISA inte-gra datos GPS (Global Positioning System) y datosde una IMU (Inertial Measurement Unit), y dis-pone de un procedimiento de sincronización deconjunto de todos los sensores. La configura-ción actual del SISA proporciona una interficieal subsistema de actitud (basado en un INS LittonLTN 101 FLAGSHIP –Inercial Navigation System–),una interficie a un receptor GPS de doble fre-cuencia y un procedimiento robusto para sin-cronizar el sensor de actitud (IMU/INS) y elsensor de imagen (CASI). El ICC ha desarrolla-do el programario para asegurar la correcta asig-nación de tiempo a los datos inerciales y a las
imágenes, y determinar la trayectoria y actitudde la plataforma aerotransportada.
Las diferencias entre el sistema de referen-cia imagen y el sistema de referencia inercialcausadas por el montaje de los sensores sondeterminadas conjuntamente con ciertos pará-metros de calibración del CASI en un ajuste foto-gramétrico usando el programario GeoTeX/ACX.
Los métodos de orientación directa requierenun buen conocimiento a priori de las relacionesgeométricas entre los sensores involucrados. Laestabilidad del acoplamiento SISA-CASI se haestudiado comparando los parámetros de matri-ces de desalineamiento y autocalibración enseries de vuelos CASI.
A modo de conclusión, el SISA demuestra suvalidez para la orientación directa del sistemaCASI.
La base de datos altimétrica en malla regularque tiene el Institut Cartogràfic de Catalunya
desde 1987 es insuficiente para algunas aplica-ciones. Por esta razón se inició el desarrollo deuna nueva base de datos con la intención deconstruir un modelo irregular de triángulos (TIN)de una sola pieza con precisión suficiente paragenerar curvas de nivel de calidad cartográfica
para escalas 1:5 000 o mayores y para todaCataluña (32 000 km2).
Se prevé cargar en la base aproximadamente300 millones de puntos. El modelo debe serdinámico para permitir la inserción y el borra-do de datos, el modelo de superficie debe serrefinable, los algoritmos han de ser robustosy se debe preservar la integridad de los datos.La triangulación escogida es la triangulaciónrestringida de Delaunay y se utiliza el algorit-mo de construcción incremental. Su rendi-miento es bueno cuando los datos de entrada
están bien distribuidos y es completamentedinámico.
La dificultad principal es el manejo de la trian-gulación con memoria externa. Los programashabituales de triangulación mantienen toda lainformación en la memoria central y no puedentriangular conjuntos de datos muy grandes (algu-nos millones de vértices). En este proyecto se
emplea un árbol cuaternario de bloques de pun-tos con regiones (bucket point-region quadtree)para mejorar la localización del triángulo que con-tiene un punto y para reducir los fallos de pági-na mediante agrupación en bloques (buckets).
El modelo de superficie es por defecto unterreno poliédrico pero se puede extender dediferentes maneras. El uso de la tecnología deprogramación orientada al objeto significa queestas extensiones pueden ser programadasfácilmente y proporciona al diseño una granflexibilidad.
HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
1
HOJAINFORMATIVAI N S T I T U T C A R T O G R À F I C D E C A T A L U N Y A
A Ñ O 5 � J U N I O 2 0 0 0 � N Ú M E R O 1 1
SUMARIOContribución del ICC en el XIX Congreso de la ISPRS:
Integración de sensores aerotransportados y orientación directa del CASI
Posicionamiento cinemático GPS robusto para la georeferenciación directa
La Visual Factory Suite. Haciendo frente a los requerimientos cambiantes de los sistemas de producción masiva en entornos de proceso de datos espaciales
Extracción de parcelas de imágenes aéreas utilizando “Competición entre Regiones”
Producción de mapas del suelo mediante la fusión de la clasificación multiespectral de imágenes Landsaty el análisis de textura de imágenes de alta resolución
Precisión potencial en la medición de puntos en imágenes MOMS usando un modelo riguroso y funciones racionales
La producción cartográfica en Venezuela utilizando InSAR aerotransportado
Una base de datos altimétrica TIN para todo un país
Los mapas en la historia de la cartografía del siglo XX
Premio a la mejor comunicación
Premio “Jordi Viñas i Folch”
Generalitat de CatalunyaInstitut Cartogràficde Catalunya
Esta hoja es una publicación gratuita disponible en catalán, castellanoe inglés.
Año 5 – Junio 2000 – Número 11 – ISSN: 1137-2389Depósito Legal: B. 39 884-1996
4HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11HOJA INFORMATIVA DEL INSTITUT CARTOGRÀFIC DE CATALUNYA. JUNIO 2000. NÚMERO 11
BREVESLOS MAPAS EN LA HISTORIA DE LA CARTOGRAFÍA DELSIGLO XX
El proyecto del ICC sobre el estudio de laevolución y la influencia de las coleccionesde mapas en la historia de la cartografía delsiglo XX ha sido admitido en un programade investigación de tres años de duraciónfinanciado por la National ScienceFoundation de los EUA.
La propuesta forma parte de los traba-jos efectuados para la elaboración del volu-men 6 de la History of Cartography, editadapor la Universidad de Chicago bajo la direc-ción del profesor David Woodward. Estevolumen trata precisamente de la carto-grafía del siglo XX y es coeditado por el pro-fesor Mark Monmonier.
PREMIO A LA MEJOR COMUNICACIÓN
Durante la celebración, el pasado sep-tiembre de 1999, del 12th InternationalTechnical Meeting of The Satellite Divisiondel Institute of Navigation de Nashville(Tennessee), se otorgó el premio a la mejorcomunicación presentada en la sesiónCarrier-Phase Positioning & AmbiguityResolution: “Resolving Carrier-Phase Ambi-guities On-The-Fly, At More Than 100 kmFrom Nearest Reference Site, With Help FromIonospheric Tomography”, pronunciada porO. L. Colombo (USRA/NASA GSFC), M. Her-nandez-Pajares, J. M. Juan y J. Sanz (Univer-sitat Politècnica de Catalunya) y Julià Talaya(Institut Cartogràfic de Catalunya).
Enhorabuena!
PREMIO “JORDI VIÑAS I FOLCH”
Coincidiendo con las sucesivas celebra-ciones bienales de la Semana Geomática deBarcelona, el ICC convoca el premio “JordiViñas i Folch” a un trabajo individual deinvestigación inédito en el campo de la geo-mática.
Durante la celebración de la 4a Semana,los días 3-6 de abril de 2000, organizada porel Institut de Geomàtica, el Institut Carto-gràfic de Catalunya, el Col·legi Oficial d’Engi-nyers Tècnics en Topografia (división deCataluña) y la Escola Universitària Politècnicade Barcelona, el jurado otorgó el premio altrabajo de investigación: “Nuevas tecnolo-gías para el establecimiento de servicios decorrecciones diferenciales GPS”, de ErnestBosch (ICC).
Enhorabuena!
Direcciones de contacto del ICC
Parc de Montjuïc – E-08038 Barcelona – Teléfono 34-93 567 15 00 – Telefax 93 567 15 67 – E-mail: [email protected]
Balmes, 209-211 – E-08006 Barcelona – Teléfono 34-93 218 87 58 – Telefax 93 218 89 59Emili Grahit, 10 A – E-17002 Girona – Teléfono 34-972 20 04 93 – Telefax 972 20 04 93Doctor Fleming, 19 – E-25006 Lleida – Teléfono 34-973 27 47 76 – Telefax 973 27 47 76Anselm Clavé, 1 – E-43004 Tarragona – Teléfono 34-977 23 01 56 – Telefax 977 23 01 56
© Institut Cartogràfic de Catalunya
PAPER ECOLÒGIC
http://www.icc.es
CONTRIBUCIÓN DEL ICC EN EL XIX CONGRESO DE LA ISPRS
Integración de sensores aerotransportados y orientación directa del CASIRamon Alamús, Julià TalayaInstitut Cartogràfic de Catalunya – [email protected], [email protected]
Los días 16-23 de julio de 2000 se celebrará en Amsterdam el XIXCongreso de la Sociedad Internacional de Fotogrametría y
Teledetección. Al igual que en las anteriores celebraciones, la participa-ción del Institut Cartogràfic de Catalunya estará muy presente porquepresentará cinco pósters, tres comunicaciones y un tutorial. Cada una deestas contribuciones se presenta, de manera resumida, en este númerode la Hoja informativa del ICC aunque, una vez celebrado el Congreso,se publicarán ampliadas en la Web del ICC:
Esta celebración, además, tiene un valor añadido: la Sociedad Españolade Cartografía, Fotogrametría y Teledetección, sociedad que reúne y repre-senta las entidades españolas dedicadas a estas especialidades, presenta-rá su candidatura para que el ICC acoja el XX Congreso de la ISPRS, quese celebrará en el año 2004.
Cabe esperar que esta propuesta tenga la resonancia que todos desea-mos y que Barcelona, una vez más, sea la sede de un acontecimiento inter-nacional que tiene como objetivos la reunión de los más prestigiosostécnicos sobre cartografía, fotogrametría y teledetección, y la puesta encomún de las experiencias y de los nuevos conocimientos que se van des-arrollando y aplicando en estos campos.
La producción cartográfica en Venezuela utilizando InSAR aerotransportadoRoman ArbiolInstitut Cartogràfic de Catalunya – [email protected]
Gloria GonzálezServicio Autónomo de Geografía y Cartografía Nacional, Caracas, Venezuela – [email protected]
Una base de datos altimétrica TIN para todo un paísAntonio RuizInstitut Cartogràfic de [email protected]
Imagen geocodificada después de la corrección radiométrica.