análisis de los parámetros estimados en un conjunto de ...deeea.urv.cat/deeea/lguasch/pfc raul...
TRANSCRIPT

Análisis de los parámetros estimados en un conjunto de
motores de inducción trifásicos
TITULACIÓN: Ingeniera Técnica Industrial en Electricidad
AUTOR: Raúl Castro Nevado
DIRECTOR: Luis Guasch Pesquer
FECHA: Junio del 2015
3
Índice
1 Introducción .....................................................................................................5
1.1 Objeto del proyecto ...................................................................................5
2 Antecedentes ....................................................................................................5
2.1 Proyecto de Manuel Cereijo Neira .............................................................6
2.2 Proyecto de Bartomeu Angulo Salonen .....................................................7
3 Alcance del proyecto ........................................................................................8
4 Motor de inducción trifásico .............................................................................9
4.1 Implantación a nivel industrial...................................................................9
4.2 Modelo de jaula sencilla ............................................................................9
4.3 Modelo de doble jaula ............................................................................. 10
5 Base de datos de motores ................................................................................ 11
5.1 Potencia a plena carga ............................................................................. 11
5.2 Polos ....................................................................................................... 11
5.3 Valor eficaz y frecuencia de la tensión .................................................... 11
5.4 Fabricantes .............................................................................................. 11
5.5 Velocidad sincronismo ............................................................................ 12
5.6 Relación de par máximo y par de arranque .............................................. 12
6 Estimación de parámetros mediante la técnica de Pedra .................................. 13
6.1 Introducción ............................................................................................ 13
6.2 Parámetros comunes para jaula sencilla y doble jaula .............................. 13
6.3 Parámetros para jaula sencilla .................................................................. 14
6.4 Parámetros para doble jaula ..................................................................... 14
6.5 Cálculo de variables para jaula sencilla.................................................... 15
6.6 Cálculo de variables para doble jaula ....................................................... 16
7 Características mecánicas ............................................................................... 17
7.1 Introducción ............................................................................................ 17
7.2 Muestra de un conjunto de características mecánicas significativas ......... 18
7.3 Análisis cualitativo de los resultados ....................................................... 34
8 Análisis cuantitativo, cálculo de errores .......................................................... 35
8.1 Procedimiento cálculo errores ................................................................. 35
8.1.1 Cálculo errores del punto de arranque .................................................. 35
8.1.2 Cálculo errores par máximo ................................................................. 35
8.1.3 Cálculo errores punto plena carga ........................................................ 35
8.2 Análisis de errores ................................................................................... 36

4
8.2.1 Punto operativo .................................................................................... 38
8.2.2 Modelo matemático. ............................................................................ 38
8.2.3 Potencia a plena carga .......................................................................... 38
8.2.4 Relación del par To / Tmax..................................................................... 38
9 Conclusiones .................................................................................................. 39
10 Referencias..................................................................................................... 40
5
1 Introducción
Los motores de inducción trifásicos son los más utilizados en los accionamientos
eléctricos industriales. Dadas sus grandes aplicaciones en este sector, es necesario conocer
sus características y obtener modelos más precisos que representen el comportamiento de
la máquina en sus diferentes zonas de funcionamiento.
El problema principal es poder predecir el comportamiento del motor, pero para ello
es necesario conocer los parámetros del modelo matemático del motor, y éstos no son
facilitados por el fabricante. Existen varias técnicas de estimación de parámetros ya que no
hay una sola técnica estipulada que permita determinar que los parámetros se ajusten a
todos los puntos de funcionamiento.
En este trabajo se va a utilizar una estimación de los parámetros eléctricos de los
motores de inducción trifásicos y se observará su precisión en comparación con los datos
suministrados por el fabricante.
Los propios fabricantes son los que nos proporcionan una serie de datos de alta
fiabilidad, a partir de los cuales se pueden obtener los diferentes parámetros aplicando
diferentes técnicas de estimación. De todas ellas aplicaremos la técnica de Pedra.
1.1 Objeto del proyecto
El objeto de este proyecto será calcular los parámetros eléctricos de un conjunto de
2.167 motores de inducción, para dos modelos matemáticos (jaula sencilla y doble jaula).
A partir de ellos se pueden calcular los valores estimados de las variables en los puntos de
funcionamiento que facilita el fabricante (potencia nominal, corriente de arranque, par
máximo,…) y compararlos con los datos del catálogo, para comprobar si la estimación de
parámetros de esta técnica y estos modelos es correcta.
2 Antecedentes
Este proyecto surge a partir de la base de dos proyectos anteriores desarrollados por
dos compañeros, en relación al estudio de una base de datos de motores de inducción. El
propósito de nuestro trabajo, pues, es complementar estos estudios y sus características
dentro del funcionamiento de los motores inducción.
Tanto los dos estudios anteriores como nuestro propio trabajo parten de la base de la
necesidad de poder conocer los parámetros no facilitados por el fabricante a través de una
técnica determinada de estimación ya que, o bien no nos han sido proporcionados o bien no
disponemos de estos datos en el catálogo, sin recurrir para ello a métodos experimentales.
A continuación pasaremos a detallar en que se han basado los trabajos anteriores.
6
2.1 Proyecto de Manuel Cereijo Neira
El primer proyecto que se pasa a comentar es el del “Método para la estimación del
momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura de eje”,
del Sr. Manuel Cereijo Neira.
Este proyecto se basa en proponer un método para la estimación del momento de
inercia de las máquinas de inducción trifásicas con un rotor de jaula de ardilla partiendo de
los datos de la altura del eje y el peso de la máquina sin necesidad de ensayos
experimentales.
Este trabajo propone que, para conocer el comportamiento en régimen dinámico de
un accionamiento eléctrico constituido por una máquina de inducción trifásica y otra
accionada, es necesario estimar los parámetros del modelo matemático.
En este proyecto se estima únicamente el momento de inercia de la máquina de
inducción trifásica.
El momento de inercia es una medida de la propiedad que tiene un cuerpo de no
modificar su estado de reposo o movimiento si no es por acción de una fuerza. Esta medida
se refiere a la inercia rotacional de un cuerpo. Es una característica propia de dicho cuerpo
referido a su eje de giro y su valor refleja la suma integral de los productos de las masas de
las partículas por el cuadrado de la distancia de cada partícula a dicho eje.
Las principales características del trabajo del Sr. Cerejo son:
- La búsqueda de catálogos actualizados de algunos de los principales fabricantes.
- Determinación de datos o características que van a influir en la estimación del
momento de inercia.
- Clasificación y agrupación de los datos obtenidos.
- Representación y análisis de los datos que permiten la elección de métodos de
estimación.
- Determinación de los aspectos constructivos de la máquina que pueden influir en
la estimación.
- Propuesta de modelos de estimación y cálculo de sus parámetros en función de
las características de la máquina como pueden ser sus características de
construcción.
- La base es de 2.624 motores de jaula de ardilla
El trabajo del Sr. Manuel Cereijo Neira, es a su vez, un estudio que consiste en una
ampliación del capítulo 4 de la tesis “Estimación de parámetros para la máquina de
inducción trifásica” del Dr. Adolfo Andrés Jaramillo Matta.
Para llevar a cabo, pues, el trabajo del Sr. Manuel Cereijo se ha actualizado y
confeccionado una nueva base de datos pasando de 952 motores (que se utilizaban en la
tesis del Dr. Jaramillo) a una nueva base de 2.624 motores, y se ha procedido a realizar la
estimación de inercia en función de otras variables como puede ser el modelo constructivo
de la máquina o clase de rendimiento.
Este proyecto amplía también las relaciones que se pueden establecer teniendo en
cuenta el tipo constructivo de la carcasa de la máquina según su material debido a que
influye decisivamente en el peso de ésta y este es uno de los factores que se tienen en
cuenta a la hora de estimar su momento de inercia. Se realiza, además, la clasificación

7
según estos parámetros: fabricante, frecuencia, velocidad de sincronismo, peso y potencia
del motor.
En el estudio previo del Dr. Jaramillo se observa la existencia de una relación
prácticamente lineal entre el momento de inercia y el producto del eje al cuadrado. Esta
relación presenta la ventaja de que tanto la masa como la altura del eje pueden ser medidas
con relativa facilidad.
El estudio del Sr. Manuel Cereijo comprueba si la nueva base de datos sigue
cumpliendo esta relación prácticamente lineal así como observar la influencia de otras
variables en dicha relación.
Este trabajo tiene en común con el estudio del Sr. Cereijo la utilización de una
porción importante de la base de datos. Sin embargo los parámetros analizados son
diferentes, el momento de inercia para el caso del Sr. Cereijo, y los parámetros eléctricos
en este caso.
2.2 Proyecto de Bartomeu Angulo Salonen
El segundo proyecto que se pasa a comentar es el del “Cálculo y análisis de los
parámetros eléctricos de un conjunto de motores de inducción”, del Sr. Bartomeu Angulo
Salonen.
Este proyecto se basa en una estimación de los parámetros eléctricos de una máquina
de inducción ya existente y en la observación de su precisión comparándola con los datos
subministrados por el fabricante aplicando la técnica de estimación de parámetros de M. H.
Haque. Asimismo, este trabajo parte de la necesidad de conocer hasta qué punto es fiable
un método para la estimación de parámetros eléctricos a partir de los datos facilitados por
el fabricante, y para conocer mejor el funcionamiento del motor.
Este trabajo parte de una extensa base de datos proporcionada por el proyecto
“Método para la estimación del momento de inercia de máquinas de inducción trifásicas a
partir de su peso y altura de eje”, del Sr. Manuel Cereijo Neira, modificada para adaptarse
al estudio propuesto por el Sr. Bartomeu Angulo.
Los objetivos del trabajo del Sr. Angulo son:
- Analizar los parámetros eléctricos de los motores de inducción a través de los
datos del fabricante.
- Seleccionar una técnica de estimación de parámetros eléctricos.
- Estimar los parámetros eléctricos del conjunto de motores a estudiar a partir de
los datos del fabricante.
- Analizar longitudinalmente y representar los parámetros obtenidos.
- Analizar la relación entre los parámetros y otras variables del motor.
Este trabajo se basa en el estudio del conjunto de motores de inducción trifásica en
jaula de ardilla y que se supone que va a trabajar en puntos de funcionamiento cercanos al
punto de punto de funcionamiento nominal. La base de las máquinas en las que se basa el
proyecto tiene las siguientes características:
- Cantidad de máquinas: 2.206.
- Margen de potencias: 0.05 a 1.000 kW.
- Frecuencias: 50 y 60 Hz.
- Velocidad de sincronismo: 750 a 3.600 rpm.
8
- Número de polos: 2, 4, 6 y 8.
- Fabricantes ABB, Siemens, Rossi, Leroy Somer, CMG, WEG y Marelli.
El trabajo del Sr. Bartomeu Angulo concluye en que, una vez realizado un profundo
análisis para determinar los parámetros del modelo de jaula sencilla a través del método de
Haque, se ha llegado a la determinación de que el método estudiado tiene una alta
fiabilidad en el punto de funcionamiento nominal en contraposición con el punto de
arranque y el punto del par máximo. Asimismo, se ha podido comprobar que el método se
vuelve más fiable para motores más grandes (P >10 kW).
La relación entre este trabajo y el proyecto previo del Sr. Angulo es la utilización de
la misma base de datos (excepto algún registro), y el análisis de los parámetros eléctricos.
Las aportaciones de este nuevo trabajo son que los parámetros han sido calculados
mediante una nueva técnica (Pedra), mientras que en el trabajo previo se utilizó la técnica
de Haque. Por otro lado, en este caso se ha trabajado con dos modelos matemáticos
diferentes: jaula sencilla y doble jaula, mientras que en el trabajo del Sr. Angulo
únicamente se trabajó con el modelo de jaula sencilla.
3 Alcance del proyecto
En este trabajo se representará un procedimiento sencillo para calcular directamente
los parámetros de los motores de inducción, utilizando los modelos de jaula sencilla y de
doble jaula. Esta técnica se ha aplicado en una amplia gama de motores de inducción,
concretamente 2.167 motores, donde los parámetros han sido calculados a partir de los
datos proporcionados por el fabricante.
Esta muestra de motores ha sido recogida de los dos trabajos anteriores realizados
por los Sres. Cereijo y Angulo y adaptando la base de datos al objetivo del presente
trabajo, las tareas realizadas han sido las siguientes:
- Seleccionar una técnica de estimación de parámetros eléctricos para modelo de
jaula sencilla y doble jaula.
- Aplicar la técnica de elegida para ambos modelos de jaula (jaula sencilla y doble
jaula), para estimar los parámetros correspondientes en cada modelo.
- Analizar gráficamente los resultados tanto para el modelo de jaula sencilla como
el de doble jaula.
- Analizar la relación entre los parámetros y otras variables del motor.
- Cálculo de los errores de los parámetros estudiados por la técnica aplicada
respecto a los datos del fabricante.
El estudio de nuestro proyecto consta de las siguientes variables:
- Cantidad de máquinas 2.167 motores de inducción trifásica con rotor de jaula de
ardilla.
- Margen de potencias: de 0.05 a 1.000 kW.
- Frecuencias: 50 y 60 Hz.
- Velocidades de sincronismo: 750 a 3600 rpm.
- Numero de polos: 2, 4, 6 y 8.
- Fabricantes: ABB, Siemens, Rossi, Leroy Somer, CMG, WEG y Marelli.

9
4 Motor de inducción trifásico
4.1 Implantación a nivel industrial
Los motores de inducción trifásicos son los más utilizados debido a su robustez,
sencillez constructiva y poco mantenimiento y además tienen un servicio excelente en
condiciones adversas. Este trabajo se ha centrado en motores con rotor de jaula de ardilla
ya que es el más utilizado dentro del mundo de las máquinas eléctricas rotativas.
En este trabajo se analiza el motor de inducción trifásico en régimen permanente así
como el circuito equivalente de éste, tanto para el modelo de jaula sencilla como el modelo
de doble jaula. Mediante el circuito equivalente es posible conocer el comportamiento de la
máquina, para ello necesitamos conocer los parámetros de los dos modelos que lo
componen.
4.2 Modelo de jaula sencilla
A continuación en la Figura 1 se puede observar el esquema del circuito equivalente
para el modelo de jaula sencilla, que se utiliza en este trabajo, con sus 5 parámetros
correspondientes.
Figura 1. Circuito equivalente del modelo de jaula sencilla para un motor de inducción
Rs = Resistencia del estátor.
Xsd = Reactancia de dispersión del estátor.
Xm = Reactancia magnetizante.
Xrd = Reactancia de dispersión del del rotor.
Rr = Resistencia del rotor.

10
4.3 Modelo de doble jaula
A continuación en la Figura 2 se puede observar el esquema del circuito equivalente
para el modelo de doble jaula, que se utiliza en este trabajo, con sus 7 parámetros
correspondientes.
Figura 2. Circuito equivalente del modelo de doble jaula para un motor de inducción
Rs = Resistencia del estátor.
Xsd = Reactancia de dispersión del estátor.
Xm = Reactancia magnetizante.
X1d = Reactancia de dispersión de la jaula interna del rotor.
R1 = Resistencia de la jaula interna.
X2d = Reactancia de dispersión de la jaula externa del rotor.
R2 = Resistencia de la jaula externa.

11
5 Base de datos de motores
Para desarrollar el estudio del trabajo se ha seleccionado una muestra significativa de
motores, en total 2.167, de catálogos de diferentes fabricantes mundiales y publicados en el
año 2010. Las principales características del conjunto de motores se resumen a
continuación.
5.1 Potencia a plena carga
La potencia plena carga, mínima y máxima (PFL) son 0.045 y 1.000 kW
respectivamente.
Distribución del número de motores según rango de potencia:
0 < P ≤ 1kW (224 motores)
1 < P ≤ 10kW (598 motores)
10 < P ≤ 100kW (804 motores)
P ≤ 1000kW (541 motores)
5.2 Polos
Distribución del número de motores según números de polos:
5.3 Valor eficaz y frecuencia de la tensión
Distribución del número de motores según voltaje y frecuencia:
400 V 50 Hz 1746 motores
460 V 60 Hz 421 motores
5.4 Fabricantes
Distribución del número de motores según los fabricantes:
AAB 573 motores
CMG 47 motores
LEROY SOMER 336 motores
MARELLI 206 motores
ROSSI 171 motores
SIEMENS 454 motores
WEG 380 motores
2 polos 639 motores
4 polos 648 motores
6 polos 527 motores
8 polos 353 motores
12
5.5 Velocidad sincronismo
Distribución del número motores según velocidad de sincronismo:
3600 rpm 125 motores
3000 rpm 514 motores
1800 rpm 125 motores
1500 rpm 523 motores
1200 rpm 102 motores
1000 rpm 425 motores
900 rpm 69 motores
750 rpm 284 motores
5.6 Relación de par máximo y par de arranque
Distribución del número motores según To / Tmax:
0.300 < To/Tmax ≤ 0.800 716 motores
0.800 < To/Tmax ≤ 0.900 654 motores
0.900 < To/Tmax ≤ 1.000 630 motores
1.000 < To/Tmax ≤ 2.273 167 motores
Para poder realizar el estudio se extrae la información del catálogo del fabricante que
normalmente facilita los siguientes datos:
Potencia en plena carga (potencia nominal) PFL
Tensión de alimentación VS
Velocidad de sincronismo ns
Par a plena carga (par nominal) TFL
Velocidad a plena carga (velocidad nominal) nFL
Corriente a plena carga (corriente nominal) IFL
Rendimiento a plena carga (rendimiento nominal) ηFL
Factor de potencia a plena carga (factor de potencia nominal) cos φFL
Relación par arranque y plena carga To / TFL
Relación intensidad de arranque e intensidad plena carga Io / IFL
Relación par máximo y plena carga Tmax / TFL

13
6 Estimación de parámetros mediante la técnica de Pedra
6.1 Introducción
En este apartado se explicar un procedimiento sencillo para calcular directamente los
parámetros de los motores de inducción, a partir de los datos del fabricante, tanto para el
modelo de jaula sencilla como el de doble jaula. Esta técnica se ha aplicado en una amplia
gama de motores de inducción, concretamente 2.167.
Para analizar el comportamiento de una máquina de jaula sencilla y doble jaula se
pueden utilizar diferentes técnicas de estimación. En el trabajo del Sr. Angulo, por
ejemplo, se aplicó la técnica de estimación de parámetros de Haque para el modelo de
jaula sencilla.
En nuestro caso se utilizarán los datos proporcionados directamente por el fabricante,
ya que se ha realizado ningún tipo de ensayo en laboratorio, y se expondrán valores
teóricos desarrollados a partir de los datos iniciales. Como se explicará en los siguientes
apartados los parámetros son calculados a través de la técnica de Pedra, tanto para el
modelo de jaula sencilla (Rs, Xsd, Xm, Xrd, Rr) como el modelo de doble jaula (Rs, Xsd, Xm,
X1d, R1, X2d, R2).
Los dos modelos tienen la misma ecuación, en el caso de esta técnica, para los
parámetros Rs, Xsd, Xm. En todos los casos los parámetros corresponden a una referencia
conexión en estrella.
Para obtener la estimación de los parámetros, la mayoría de las referencias científicas
siguen la misma secuencia: seleccionar el modelo matemático, obtener el conjunto de datos
originales, aplicar el algoritmo diseñado para minimizar los errores con algunos criterios y
finalmente se obtiene el conjunto de parámetros estimados.
6.2 Parámetros comunes para jaula sencilla y doble jaula
𝑅𝑠 = 1.5 ∙ 𝑅𝑟 (1)
𝑋𝑚 =𝑉𝑠
𝑄𝐹𝐿
2 (2)
𝑋𝑠𝑑 = 0.05 ∙ 𝑋𝑚 (3)
Donde:
QFL potencia reactiva en plena carga
𝑄𝐹𝐿 = 𝑃𝐹𝐿 ∙ 𝑡𝑔 (𝑎𝑟𝑐𝑜𝑠 (𝑐𝑜𝑠𝜑)) (4)

14
6.3 Parámetros para jaula sencilla
Expresiones para calcular parámetros de rotor
𝑅𝑟 =3(
𝑉𝑠
√3)
2∙𝑆𝘍𝐿
𝑃𝐹𝐿 (5)
𝑋𝑟𝑑 = 0.05 ∙ 𝑋𝑚 (6)
Donde:
SFL Deslizamiento en plena carga
SFL =𝑛𝑆− 𝑛𝑁
𝑛𝑆 (7)
6.4 Parámetros para doble jaula
Expresiones para calcular los parámetros del rotor
𝑅₁ =3(
𝑉𝑠
√3)
2∙𝑆𝘍𝐿
𝑃𝐹𝐿= 𝑅𝑟 (8)
𝑅₂ = 5 · 𝑅₁ (9)
𝑋₁𝑑 = 1.2 · 𝑋𝑠𝑑 (10)
𝑋₂𝑑 = 1.0 · 𝑋𝑠𝑑 (11)
A partir de los parámetros calculados los valores simulados para las diferentes
variables (par, corriente, potencia, etc.) se pueden obtener por un nuevo conjunto de
expresiones. Las expresiones para los diferentes modelos de jaula sencilla y doble jaula se
detallan en los siguientes apartados.
15
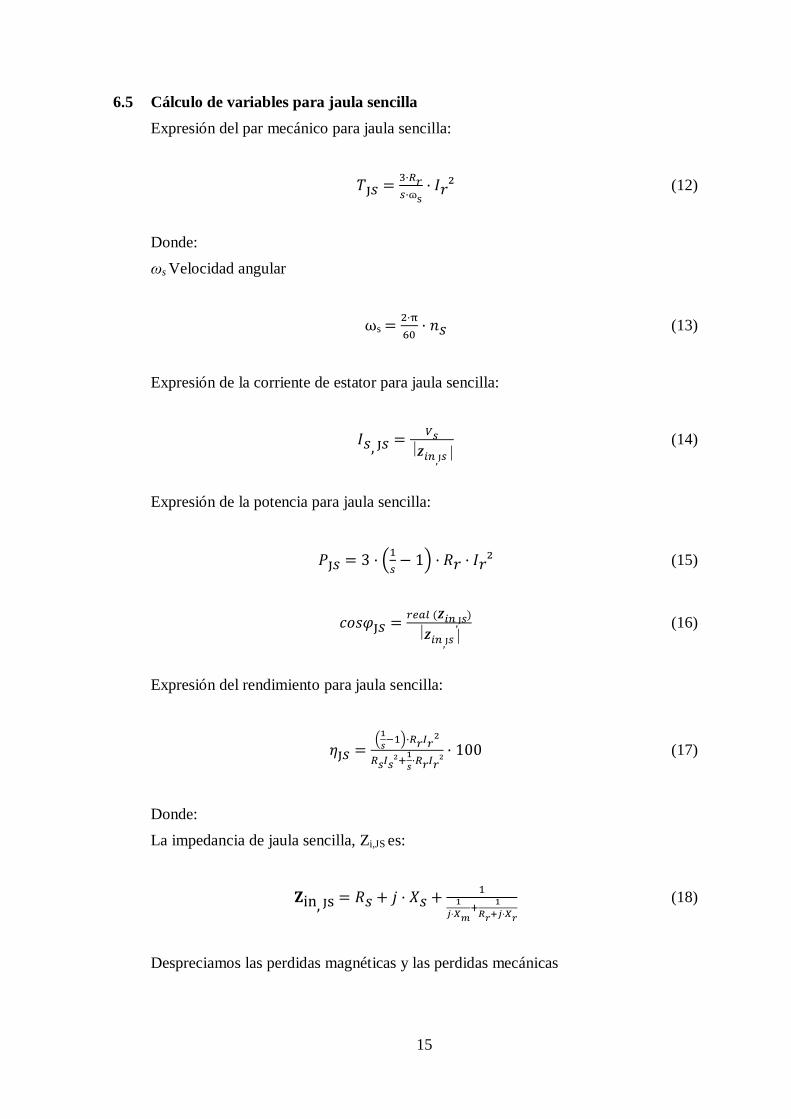
6.5 Cálculo de variables para jaula sencilla
Expresión del par mecánico para jaula sencilla:
𝑇ᴊ𝑠 =3·𝑅𝑟𝑠·ɷѕ
· 𝐼𝑟² (12)
Donde:
ωs Velocidad angular
ωs =2·π
60· 𝑛𝑠 (13)
Expresión de la corriente de estator para jaula sencilla:
𝐼𝑠, ᴊ𝑠 =𝑉𝑠
𝒁𝑖𝑛,ᴊ𝑠
(14)
Expresión de la potencia para jaula sencilla:
𝑃ᴊ𝑠 = 3 · (1
𝑠− 1) · 𝑅𝑟 · 𝐼𝑟² (15)
𝑐𝑜𝑠𝜑ᴊ𝑠 =𝑟𝑒𝑎𝑙 (𝒁𝑖𝑛,ᴊ𝑠
)
𝒁𝑖𝑛,ᴊ𝑠
(16)
Expresión del rendimiento para jaula sencilla:
𝜂ᴊ𝑠 =(
1
𝑠−1)·𝑅𝑟𝐼𝑟
2
𝑅𝑠𝐼𝑠²+1
𝑠·𝑅𝑟𝐼𝑟²
· 100 (17)
Donde:
La impedancia de jaula sencilla, Zi,JS es:
𝐙in, ᴊs = 𝑅𝑠 + 𝑗 · 𝑋𝑠 +1
1
𝑗·𝑋𝑚+
1
𝑅𝑟+𝑗·𝑋𝑟
(18)
Despreciamos las perdidas magnéticas y las perdidas mecánicas

16
6.6 Cálculo de variables para doble jaula
Expresión del par mecánico para doble jaula:
𝑇ᴅᴊ =3
𝑠·ɷ𝑠· (𝑅₁ · 𝐼₁2 + 𝑅₂ · 𝐼₂2) (19)
Expresión de la corriente de estator para doble jaula:
𝐼ѕ, ᴅᴊ =𝑉𝑠
𝒁𝑖𝑛,ᴅᴊ
(20)
Expresión de la potencia para doble jaula:
𝑃ᴅᴊ = 3 · (1
s− 1) · (𝑅₁ · 𝐼₁2 + 𝑅₂ · 𝐼₂2) (21)
𝑐𝑜𝑠 𝜑ᴅᴊ = 𝑟𝑒𝑎𝑙(𝒁𝑖𝑛,ᴅᴊ)
𝒁𝑖𝑛,ᴅᴊ
(22)
Expresión del rendimiento para doble jaula:
𝜂ᴅᴊ =(
1
𝑠−1)·(𝑅₁𝐼₁2−𝑅₂𝐼₂2)
𝑅𝑠𝐼𝑠2+
1
𝑠·(𝑅₁𝐼₁2𝐼₁+𝑅₂2)
· 100 (23)
Donde:
La impedancia de doble jaula, Zi,ᴅᴊ es:
𝐙in, ᴅᴊ = 𝑅s + j · 𝑋s +1
1
j·𝑋m+
1
𝑅₁+j·𝑋₁+
1
𝑅₂+𝑗·𝑋₂
(24)
Despreciamos las perdidas magnéticas y las perdidas mecánicas

17
7 Características mecánicas
7.1 Introducción
Se ha seleccionado un conjunto de 32 motores de la muestra (4 motores para cada
velocidad de sincronismo de diferentes potencias: 750 rpm, 900 rpm, 1000 rpm, 1200 rpm,
1500 rpm, 1800 rpm, 3000 rpm y 3600 rpm), para comparar la información suministrada
por el fabricante con los valores simulados. Este es un conjunto representativo de la amplia
gama de los motores de los que se dispone en nuestra base de datos, concretamente 2.167,
como hemos comentado anteriormente.
Como herramientas para la muestra de las características mecánicas de los motores
se ha elegido las características de par-velocidad, los resultados de las cuales se detallan en
las 32 figuras seleccionas que se mostrarán en el apartado siguiente.
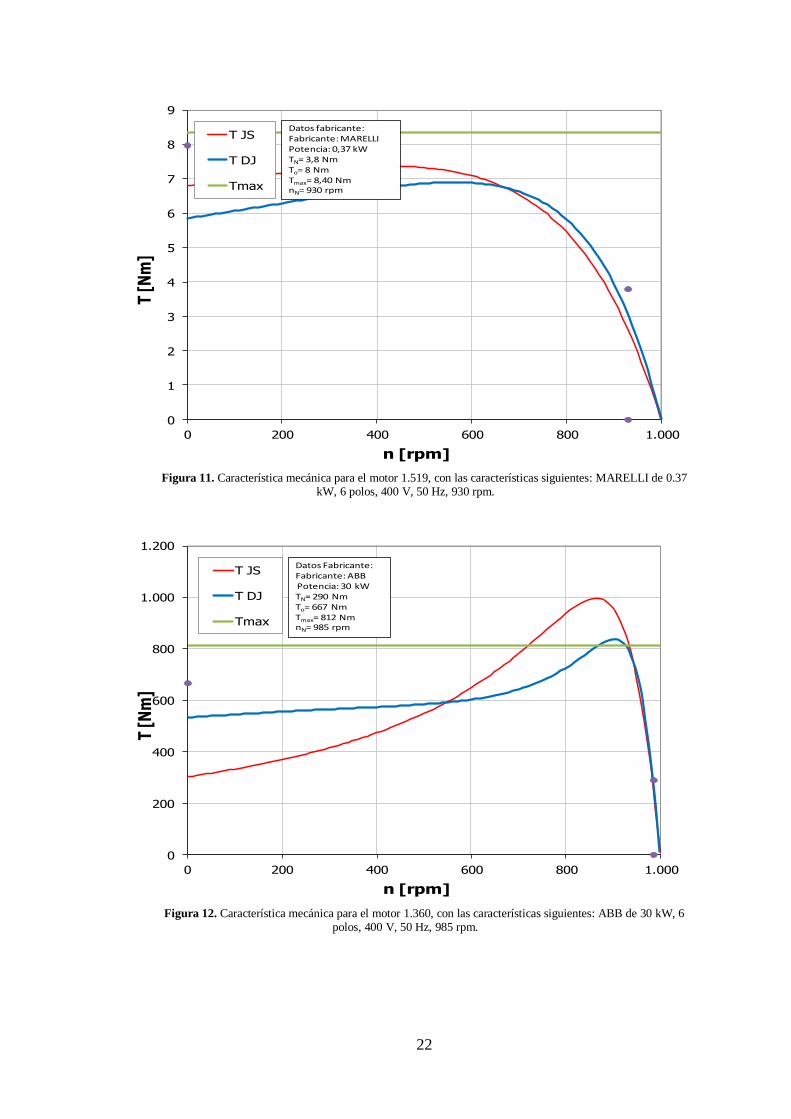
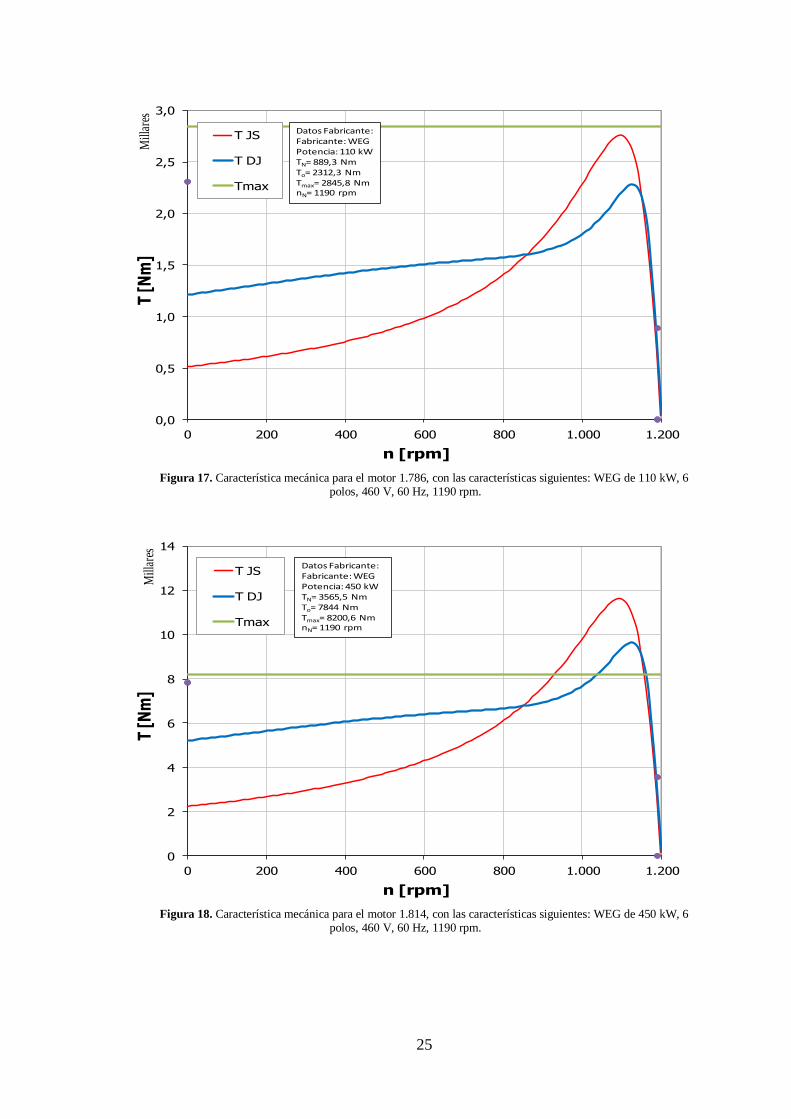
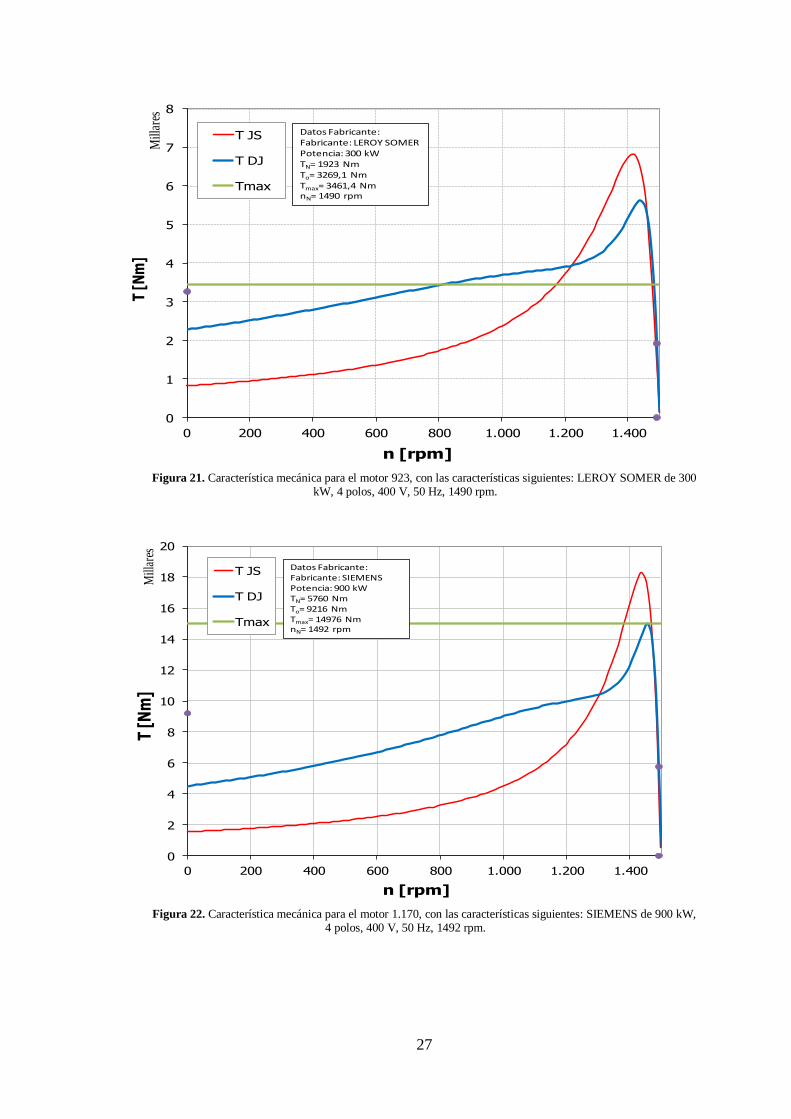
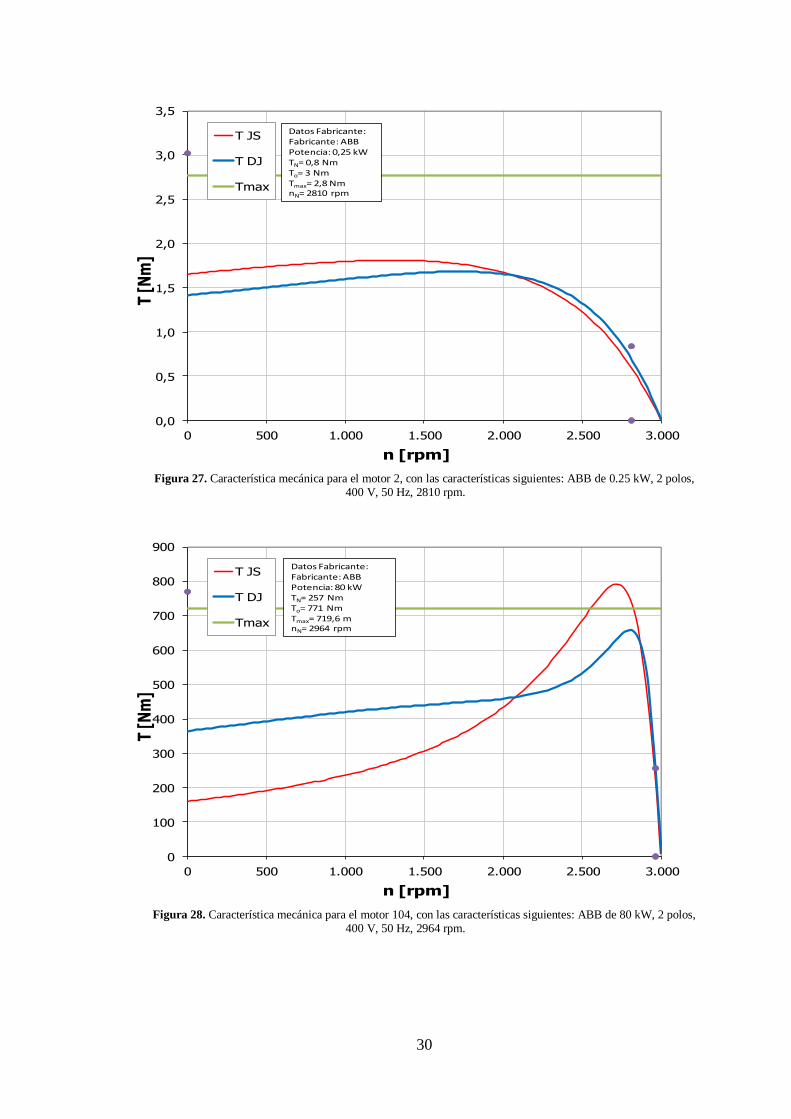
Cada una de estas figuras están relacionadas con un motor específico, y los datos que
se representan son: simulación de la curva característica par-velocidad para el modelo de
jaula sencilla (línea roja continua), simulación de la curva característica par-velocidad para
el modelo de doble jaula (línea azul continua), par arranque definido por el fabricante, par
máximo definido por el fabricante (línea verde continua), punto a plena carga, punto de
sincronismo.

18
7.2 Muestra de un conjunto de características mecánicas significativas
Figura 3. Característica mecánica para el motor 1.818, con las características siguientes: ABB de 0,12 kW, 8 polos, 400 V, 50 Hz, 670 rpm.
Figura 4. Característica mecánica para el motor 2.057, con las características siguientes: SIEMENS de 560 kW, 8 polos, 400 V, 50 Hz, 735 rpm.
0
1
2
3
4
5
6
0 100 200 300 400 500 600 700
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos fabricante:Fabricante: ABBPotencia: 0,12 kWTN= 1,70 NmTo= 4,80 NmTmax= 4,1 NmnN= 670 rpm
0
5
10
15
20
25
30
0 100 200 300 400 500 600 700
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: SIEMENSPotencia: 560 kWTN= 7210 NmTo=10094 NmTmax= 17304 NmnN= 735 rpm

19
Figura 5. Característica mecánica para el motor 1.863, con las características siguientes: ABB de 11 kW, 8 polos, 400 V, 50 Hz, 731 rpm.
Figura 6. Característica mecánica para el motor 2.102, con las características siguientes: SIEMENS de 560 kW, 8
polos, 400 V, 50 Hz, 742 rpm.
0
100
200
300
400
500
600
700
0 100 200 300 400 500 600 700
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: ABBPotencia: 11 kWTN= 143 NmTo= 257,4 NmTmax= 371,8 NmnN= 731 rpm
0
5
10
15
20
25
30
0 100 200 300 400 500 600 700
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: SIEMENSPotencia: 560 kWTN= 7210 NmTo=10094 NmTmax= 17304 NmnN= 742 rpm
20
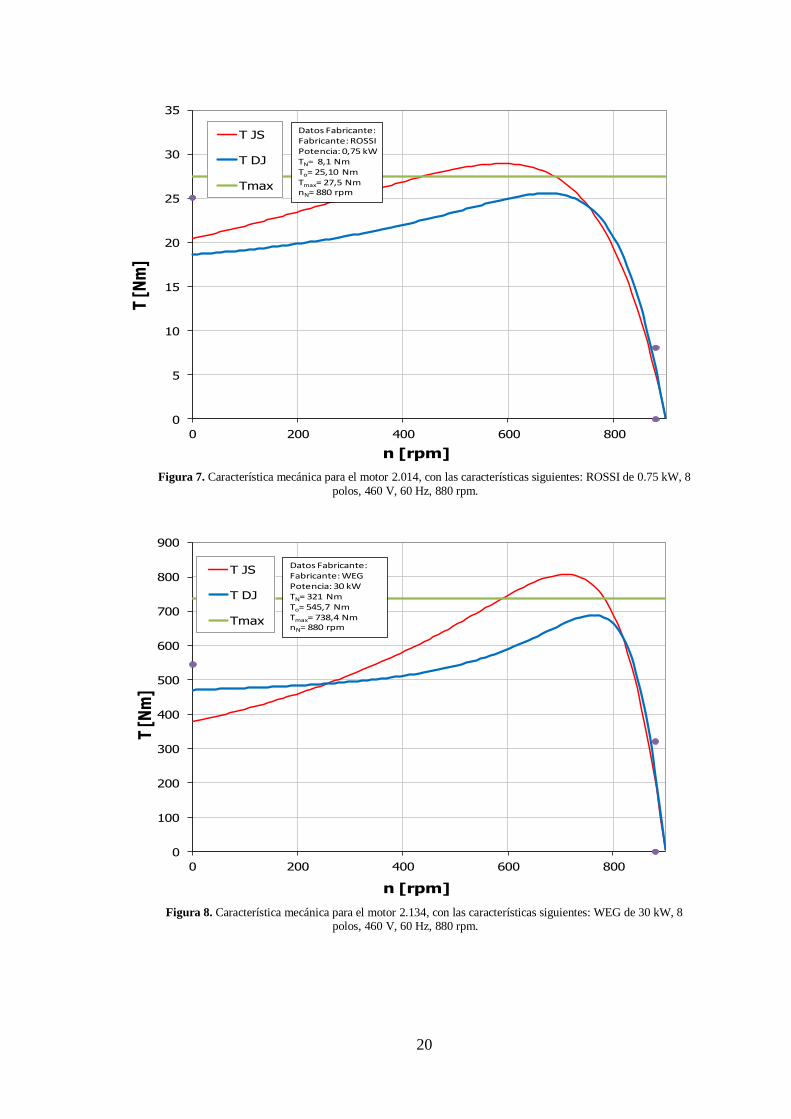
Figura 7. Característica mecánica para el motor 2.014, con las características siguientes: ROSSI de 0.75 kW, 8
polos, 460 V, 60 Hz, 880 rpm.
Figura 8. Característica mecánica para el motor 2.134, con las características siguientes: WEG de 30 kW, 8 polos, 460 V, 60 Hz, 880 rpm.
0
5
10
15
20
25
30
35
0 200 400 600 800
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: ROSSIPotencia: 0,75 kWTN= 8,1 NmTo= 25,10 NmTmax= 27,5 NmnN= 880 rpm
0
100
200
300
400
500
600
700
800
900
0 200 400 600 800
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 30 kWTN= 321 NmTo= 545,7 NmTmax= 738,4 NmnN= 880 rpm
21
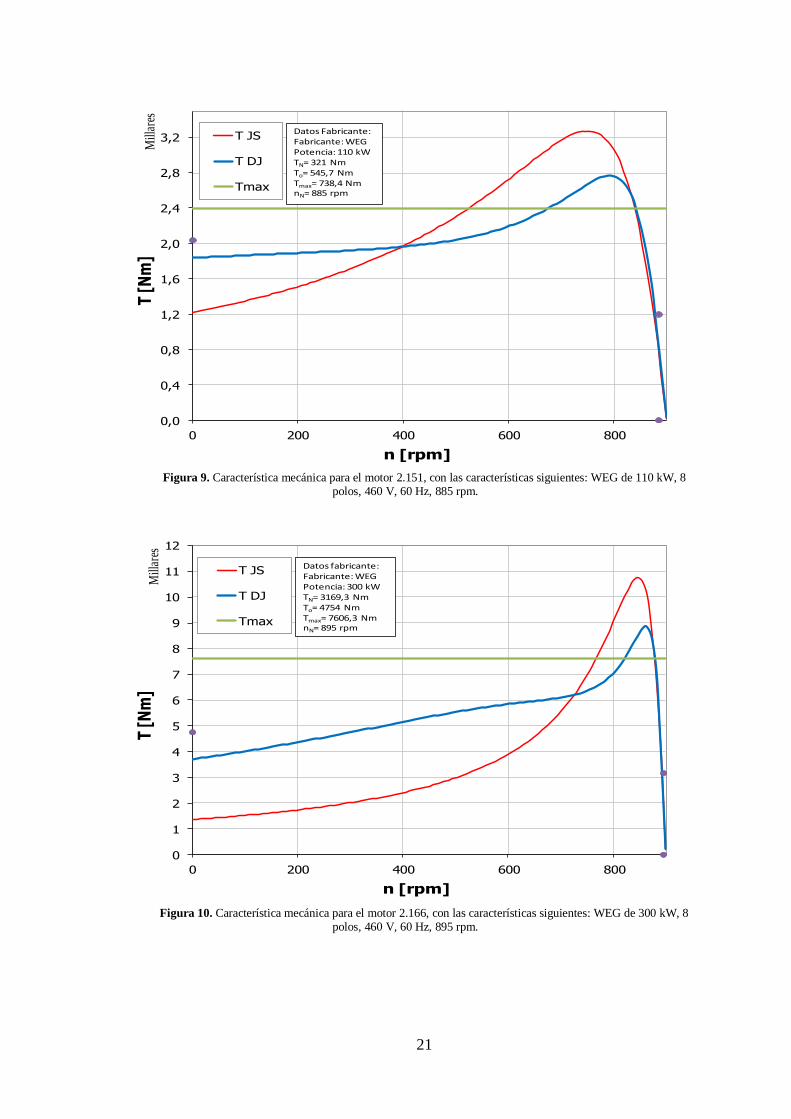
Figura 9. Característica mecánica para el motor 2.151, con las características siguientes: WEG de 110 kW, 8 polos, 460 V, 60 Hz, 885 rpm.
Figura 10. Característica mecánica para el motor 2.166, con las características siguientes: WEG de 300 kW, 8 polos, 460 V, 60 Hz, 895 rpm.
0,0
0,4
0,8
1,2
1,6
2,0
2,4
2,8
3,2
0 200 400 600 800
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 110 kWTN= 321 NmTo= 545,7 NmTmax= 738,4 NmnN= 885 rpm
0
1
2
3
4
5
6
7
8
9
10
11
12
0 200 400 600 800
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos fabricante:Fabricante: WEGPotencia: 300 kWTN= 3169,3 NmTo= 4754 NmTmax= 7606,3 NmnN= 895 rpm
22
Figura 11. Característica mecánica para el motor 1.519, con las características siguientes: MARELLI de 0.37 kW, 6 polos, 400 V, 50 Hz, 930 rpm.
Figura 12. Característica mecánica para el motor 1.360, con las características siguientes: ABB de 30 kW, 6 polos, 400 V, 50 Hz, 985 rpm.
0
1
2
3
4
5
6
7
8
9
0 200 400 600 800 1.000
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos fabricante:Fabricante: MARELLIPotencia: 0,37 kWTN= 3,8 NmTo= 8 NmTmax= 8,40 NmnN= 930 rpm
0
200
400
600
800
1.000
1.200
0 200 400 600 800 1.000
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: ABBPotencia: 30 kWTN= 290 NmTo= 667 NmTmax= 812 NmnN= 985 rpm

23
Figura 13. Característica mecánica para el motor 1.511, con las características siguientes: LEROY SOMER de 300 kW, 6 polos, 400 V, 50 Hz, 992 rpm.
Figura 14. Característica mecánica para el motor 1.722, con las características siguientes: SIEMENS de 900 kW, 6 polos, 400 V, 50 Hz, 992 rpm.
0
2
4
6
8
10
12
0 200 400 600 800 1.000
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Frabricante: LEROY SOMERPotencia: 300 kWTN= 2888 NmTo= 4620,8 NmTmax= 6064,8 NmnN= 992 rpm
0
5
10
15
20
25
30
0 200 400 600 800 1.000
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos fabricante:Fabricante: SIEMENSPotencia: 900 kWTN= 8660 NmTo= 12990 NmTmax= 20784 NmnN= 992 rpm

24
Figura 15. Característica mecánica para el motor 1.590, con las características siguientes: ROSSI de 3 kW, 6 polos, 460 V, 60 Hz, 1170 rpm.
Figura 16. Característica mecánica para el motor 1.765, con las características siguientes: WEG de 30 kW, 6 polos, 460 V, 60 Hz, 1185 rpm.
0
10
20
30
40
50
60
70
80
90
0 200 400 600 800 1.000 1.200
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: ROSSIPotencia: 3 kWTN= 24,50 NmTo= 63,70 NmTmax= 80,90 NmnN= 1170 rpm
0
100
200
300
400
500
600
700
800
900
0 200 400 600 800 1.000 1.200
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 30 kWTN= 243,2 NmTo= 632,2 NmTmax= 778,1 NmnN= 1185 rpm
25
Figura 17. Característica mecánica para el motor 1.786, con las características siguientes: WEG de 110 kW, 6 polos, 460 V, 60 Hz, 1190 rpm.
Figura 18. Característica mecánica para el motor 1.814, con las características siguientes: WEG de 450 kW, 6 polos, 460 V, 60 Hz, 1190 rpm.
0,0
0,5
1,0
1,5
2,0
2,5
3,0
0 200 400 600 800 1.000 1.200
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 110 kWTN= 889,3 NmTo= 2312,3 NmTmax= 2845,8 NmnN= 1190 rpm
0
2
4
6
8
10
12
14
0 200 400 600 800 1.000 1.200
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 450 kWTN= 3565,5 NmTo= 7844 NmTmax= 8200,6 NmnN= 1190 rpm

26
Figura 19. Característica mecánica para el motor 819, con las características siguientes: LEROY SOMER de 0.06 kW, 4 polos, 400 V, 50 Hz, 1380 rpm.
Figura 20. Característica mecánica para el motor 883, con las características siguientes: LEROY SOMER de 30 kW, 4 polos, 400 V, 50 Hz, 1472 rpm.
0,0
0,2
0,4
0,6
0,8
1,0
1,2
0 200 400 600 800 1.000 1.200 1.400
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: LEROY SOMERPotencia: 0,06 kWTN= 0,4 NmTo= 1 NmTmax= 1NmnN= 1380 rpm
0
100
200
300
400
500
600
700
0 200 400 600 800 1.000 1.200 1.400
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: LEROY SOMERPotencia: 30 kWTN= 195 NmTo= 526,5 NmTmax= 507 NmnN= 1472
27
Figura 21. Característica mecánica para el motor 923, con las características siguientes: LEROY SOMER de 300 kW, 4 polos, 400 V, 50 Hz, 1490 rpm.
Figura 22. Característica mecánica para el motor 1.170, con las características siguientes: SIEMENS de 900 kW, 4 polos, 400 V, 50 Hz, 1492 rpm.
0
1
2
3
4
5
6
7
8
0 200 400 600 800 1.000 1.200 1.400
T [N
m]
Mill
ares
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: LEROY SOMERPotencia: 300 kWTN= 1923 NmTo= 3269,1 NmTmax= 3461,4 NmnN= 1490 rpm
0
2
4
6
8
10
12
14
16
18
20
0 200 400 600 800 1.000 1.200 1.400
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: SIEMENSPotencia: 900 kWTN= 5760 NmTo= 9216 NmTmax= 14976 NmnN= 1492 rpm

28
Figura 23. Característica mecánica para el motor 1.000, con las características siguientes: ROSSI de 1.10 kW, 4 polos, 460 V, 60 Hz, 1715 rpm.
Figura 24. Característica mecánica para el motor 1.238, con las características siguientes: WEG de 45 kW, 4 polos, 460 V, 60 Hz, 1780 rpm.
0
5
10
15
20
25
0 200 400 600 800 1.000 1.200 1.400 1.600 1.800
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: ROSSIPotencia: 1,10 kWTN= 6,1 NmTo= 22 NmTmax= 22,6 NmnN= 1715 rpm
0
100
200
300
400
500
600
700
0 200 400 600 800 1.000 1.200 1.400 1.600 1.800
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 45 kWTN= 243,2 NmTo= 656,5 NmTmax= 778,1 NmnN= 1780 rpm

29
Figura 25. Característica mecánica para el motor 1.271, con las características siguientes: WEG de 220 kW, 4 polos, 460 V, 60 Hz, 1790 rpm.
Figura 26. Característica mecánica para el motor 1.288, con las características siguientes: WEG de 515 kW, 4 polos, 460 V, 60 Hz, 1790 rpm.
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
0 200 400 600 800 1.000 1.200 1.400 1.600 1.800
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 220 kWTN= 1185,8 NmTo= 2252,9 NmTmax= 2608,7 NmnN= 1790 rpm
0
1
2
3
4
5
6
7
8
0 200 400 600 800 1.000 1.200 1.400 1.600 1.800
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 515 kWTN= 2773,1 NmTo= 6932,9 NmTmax= 7210,2 NmnN= 1790 rpm
30
Figura 27. Característica mecánica para el motor 2, con las características siguientes: ABB de 0.25 kW, 2 polos, 400 V, 50 Hz, 2810 rpm.
Figura 28. Característica mecánica para el motor 104, con las características siguientes: ABB de 80 kW, 2 polos, 400 V, 50 Hz, 2964 rpm.
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
0 500 1.000 1.500 2.000 2.500 3.000
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: ABBPotencia: 0,25 kWTN= 0,8 NmTo= 3 NmTmax= 2,8 NmnN= 2810 rpm
0
100
200
300
400
500
600
700
800
900
0 500 1.000 1.500 2.000 2.500 3.000
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: ABBPotencia: 80 kWTN= 257 NmTo= 771 NmTmax= 719,6 mnN= 2964 rpm
31
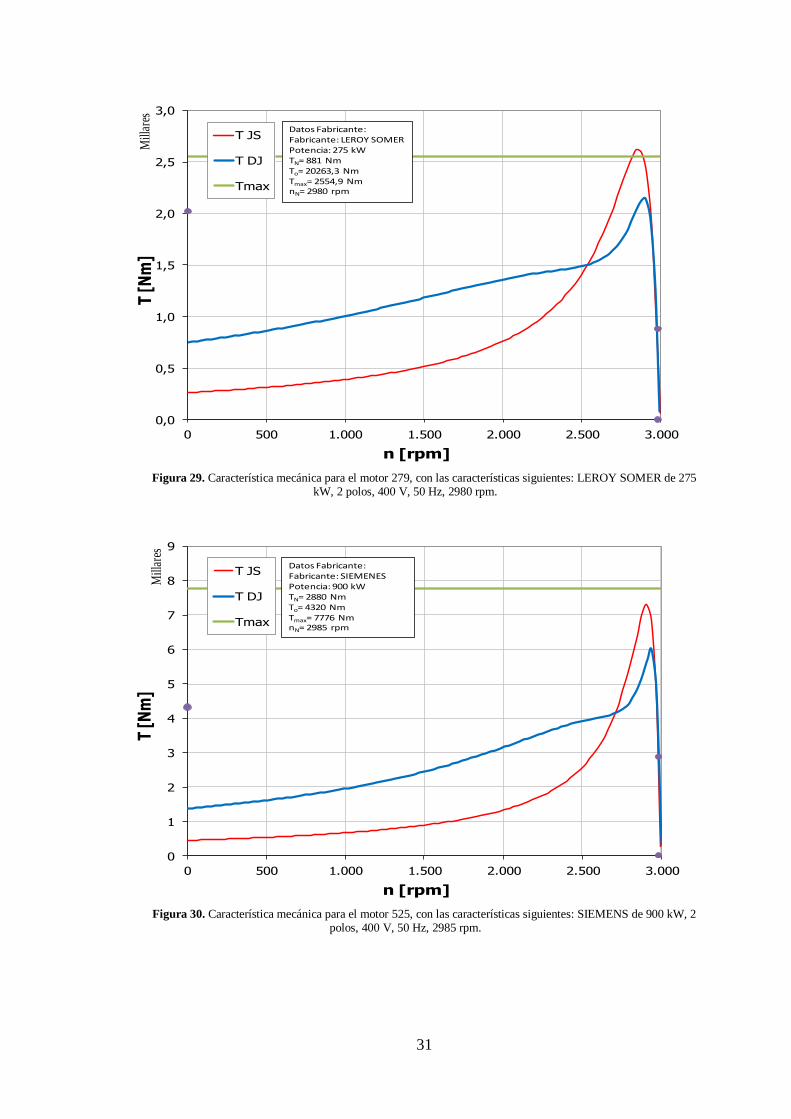
Figura 29. Característica mecánica para el motor 279, con las características siguientes: LEROY SOMER de 275 kW, 2 polos, 400 V, 50 Hz, 2980 rpm.
Figura 30. Característica mecánica para el motor 525, con las características siguientes: SIEMENS de 900 kW, 2 polos, 400 V, 50 Hz, 2985 rpm.
0,0
0,5
1,0
1,5
2,0
2,5
3,0
0 500 1.000 1.500 2.000 2.500 3.000
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: LEROY SOMERPotencia: 275 kWTN= 881 NmTo= 20263,3 NmTmax= 2554,9 NmnN= 2980 rpm
0
1
2
3
4
5
6
7
8
9
0 500 1.000 1.500 2.000 2.500 3.000
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: SIEMENESPotencia: 900 kWTN= 2880 NmTo= 4320 NmTmax= 7776 NmnN= 2985 rpm
32
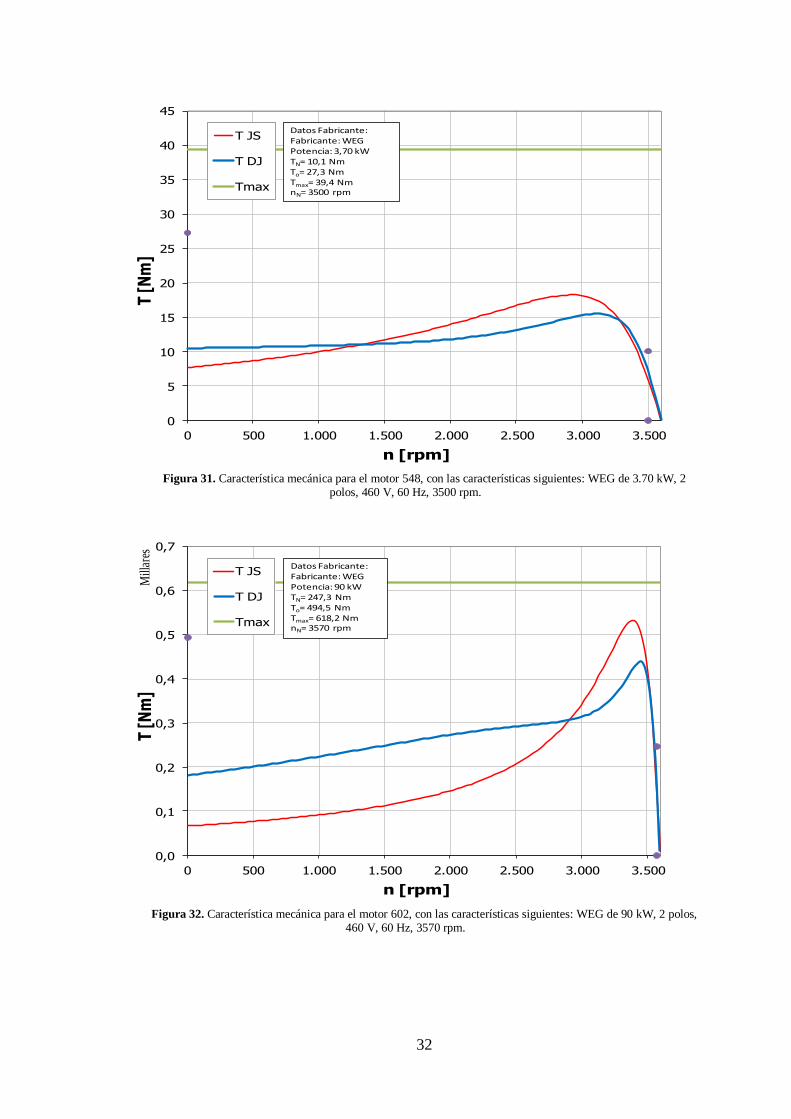
Figura 31. Característica mecánica para el motor 548, con las características siguientes: WEG de 3.70 kW, 2 polos, 460 V, 60 Hz, 3500 rpm.
Figura 32. Característica mecánica para el motor 602, con las características siguientes: WEG de 90 kW, 2 polos, 460 V, 60 Hz, 3570 rpm.
0
5
10
15
20
25
30
35
40
45
0 500 1.000 1.500 2.000 2.500 3.000 3.500
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 3,70 kWTN= 10,1 NmTo= 27,3 NmTmax= 39,4 NmnN= 3500 rpm
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0 500 1.000 1.500 2.000 2.500 3.000 3.500
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 90 kWTN= 247,3 NmTo= 494,5 NmTmax= 618,2 NmnN= 3570 rpm
33
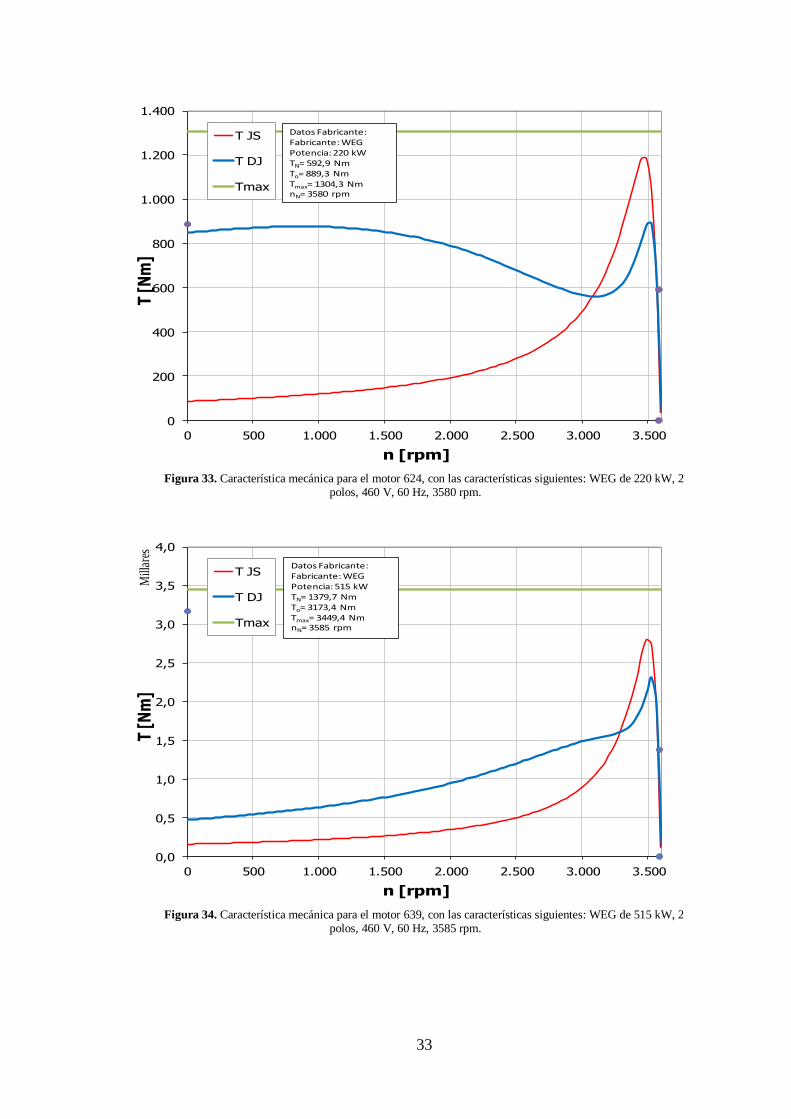
Figura 33. Característica mecánica para el motor 624, con las características siguientes: WEG de 220 kW, 2 polos, 460 V, 60 Hz, 3580 rpm.
Figura 34. Característica mecánica para el motor 639, con las características siguientes: WEG de 515 kW, 2 polos, 460 V, 60 Hz, 3585 rpm.
0
200
400
600
800
1.000
1.200
1.400
0 500 1.000 1.500 2.000 2.500 3.000 3.500
T [
Nm
]
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 220 kWTN= 592,9 NmTo= 889,3 NmTmax= 1304,3 NmnN= 3580 rpm
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
0 500 1.000 1.500 2.000 2.500 3.000 3.500
T [
Nm
]M
illar
es
n [rpm]
T JS
T DJ
Tmax
Datos Fabricante:Fabricante: WEGPotencia: 515 kWTN= 1379,7 NmTo= 3173,4 NmTmax= 3449,4 NmnN= 3585 rpm

34
7.3 Análisis cualitativo de los resultados
Para identificar los motores y sus características principales se adjunta la tabla
siguiente donde se resumen diferentes datos proporcionado por el fabricante para cada
motor, en esta tabla se podrá identificar exactamente la posición que ocupa cada
representación gráfica expuesta en el apartado anterior en función del motor seleccionado.
Nº gráfica Nº motor f (Hz) nº polos nN Voltaje TO TN
1 1.818 50 8 670 400 4,8 4,1
2 2.057 50 8 735 400 151,2 72
3 1.863 50 8 731 400 257,4 143
4 2.102 50 8 742 400 10094 7210
5 2.014 60 8 880 460 25,1 8,1
6 2.134 60 8 880 460 545,7 321
7 2.151 60 8 885 460 2039 1199,4
8 2.166 60 8 895 460 4754 3169,3
9 1.519 50 6 930 400 8 3,8
10 1.360 50 6 985 400 667 290
11 1.511 50 6 992 400 4620,8 2888
12 1.722 50 6 992 400 12990 8660
13 1.590 60 6 1170 460 63,7 24,5
14 1.765 60 6 1185 460 632,2 243,2
15 1.786 60 6 1190 460 2312,2 889,3
16 1.814 60 6 1190 460 7844 3565,5
17 819 50 4 1380 400 1 0,4
18 883 50 4 1472 400 526,5 195
19 923 50 4 1490 400 3269,1 1923
20 1.170 50 4 1492 400 9216 5760
21 1.000 60 4 1715 460 22 6,1
22 1.238 60 4 1780 460 656,5 243,2
23 1.271 60 4 1790 460 2252,9 1185,8
24 1.288 60 4 1790 460 6932,9 2773,1
25 2 50 2 2810 400 3 0,8
26 104 50 2 2964 400 771 257
27 279 50 2 2980 400 2026,3 881
28 525 50 2 2985 400 4320 2880
29 548 60 2 3500 460 27,3 10,1
30 602 60 2 3570 460 494,5 247,3
31 624 60 2 3580 460 889,3 592,9
32 639 60 2 3585 460 3173,4 1379,7
Tabla 1. Distribución de los motores representados
El análisis que se extrae de los resultados mostrados en las gráficas, es que esta
técnica proporciona grandes errores en los puntos iniciales y en el par máximo, pero por
otro lado proporcionan buenos resultados en el punto de plena carga ya que las líneas que
describe esta técnica para ambos modelos pasan cerca del punto de plena carga facilitado
por el fabricante, tanto para el modelo de jaula sencilla como el modelo doble jaula.
35
8 Análisis cuantitativo, cálculo de errores
8.1 Procedimiento cálculo errores
Para cuantificar los errores entre los resultados simulados y los resultados extraídos
de los datos del fabricante, en los diferentes puntos de funcionamiento, la expresión que se
ha utilizado ha sido la siguiente:
𝑒𝑥 =𝑥𝑠𝑖𝑛𝑢𝑙𝑎𝑑𝑜−𝑥𝑓𝑎𝑏𝑟𝑖𝑐𝑎𝑛𝑡𝑒
𝑥𝑓𝑎𝑏𝑟𝑖𝑐𝑎𝑛𝑡𝑒· 100 (25)
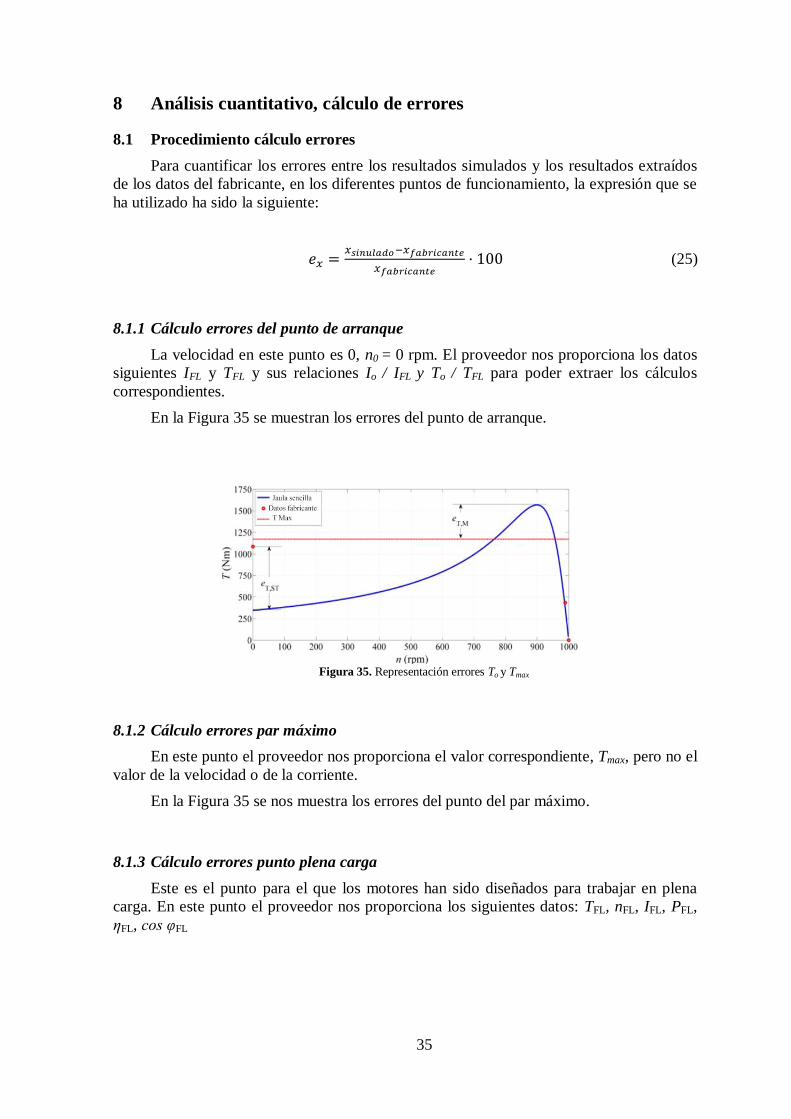
8.1.1 Cálculo errores del punto de arranque
La velocidad en este punto es 0, n0 = 0 rpm. El proveedor nos proporciona los datos
siguientes IFL y TFL y sus relaciones Io / IFL y To / TFL para poder extraer los cálculos
correspondientes.
En la Figura 35 se muestran los errores del punto de arranque.
Figura 35. Representación errores To y Tmax
8.1.2 Cálculo errores par máximo
En este punto el proveedor nos proporciona el valor correspondiente, Tmax, pero no el
valor de la velocidad o de la corriente.
En la Figura 35 se nos muestra los errores del punto del par máximo.
8.1.3 Cálculo errores punto plena carga
Este es el punto para el que los motores han sido diseñados para trabajar en plena
carga. En este punto el proveedor nos proporciona los siguientes datos: TFL, nFL, IFL, PFL,
ηFL, cos φFL
36
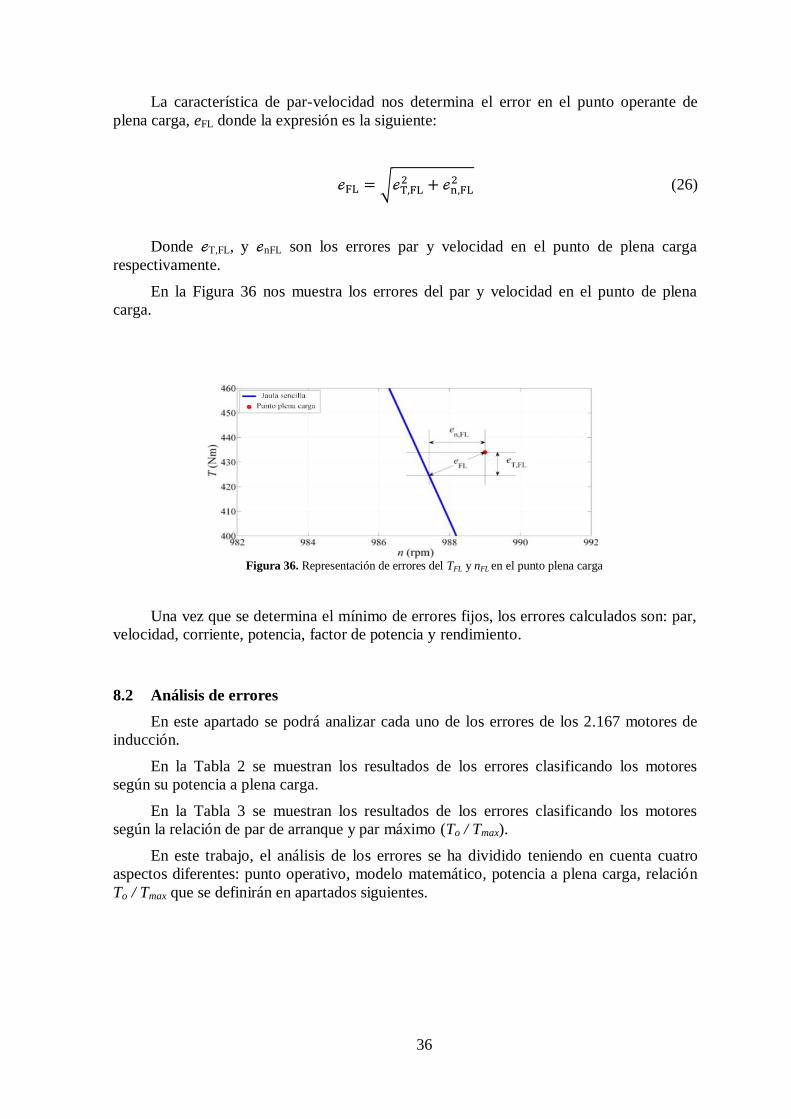
La característica de par-velocidad nos determina el error en el punto operante de
plena carga, eFL donde la expresión es la siguiente:
ℯFL = √ℯT,FL2 + ℯn,FL
2 (26)
Donde ℯT,FL, y ℯnFL son los errores par y velocidad en el punto de plena carga
respectivamente.
En la Figura 36 nos muestra los errores del par y velocidad en el punto de plena
carga.
Figura 36. Representación de errores del TFL y nFL en el punto plena carga
Una vez que se determina el mínimo de errores fijos, los errores calculados son: par,
velocidad, corriente, potencia, factor de potencia y rendimiento.
8.2 Análisis de errores
En este apartado se podrá analizar cada uno de los errores de los 2.167 motores de
inducción.
En la Tabla 2 se muestran los resultados de los errores clasificando los motores
según su potencia a plena carga.
En la Tabla 3 se muestran los resultados de los errores clasificando los motores
según la relación de par de arranque y par máximo (To / Tmax).
En este trabajo, el análisis de los errores se ha dividido teniendo en cuenta cuatro
aspectos diferentes: punto operativo, modelo matemático, potencia a plena carga, relación
To / Tmax que se definirán en apartados siguientes.

37
Tabla 2: Representación de los errores de los motores según PFL
Tabla 3. Representación de los errores de los motores según relación To / Tmax
mediadesviacion
estandarmedia
desviacion
estandarmedia
desviacion
estandarmedia
desviacion
estandarmedia
desviacion
estandar
Par arranque JS -26,10 26,68 -21,84 36,24 -53,70 26,92 -74,94 14,67 -47,36 34,48
Par arranque DJ -33,67 23,36 -22,70 29,55 -29,06 22,13 -38,75 28,12 -30,21 -30,21
Intensidad arranque JS -37,31 18,05 -13,15 45,40 -8,08 23,17 -7,16 14,37 -12,27 30,50
Intensidad arranque DJ -37,31 18,05 -13,15 45,40 -8,08 23,17 -7,16 14,37 -12,27 30,50
Par máximo JS -23,44 23,26 -4,78 27,20 14,89 26,68 31,64 30,85 9,68 32,59
Par máximo DJ -27,86 20,96 -15,30 24,72 -3,71 23,50 6,82 27,82 -6,78 26,96
Par nominal JS -3,12 6,21 -0,20 0,49 -0,14 1,33 -3,15 5,67 -1,22 3,84
Par nominal DJ -2,51 5,73 -0,07 0,64 0,11 0,98 1,54 1,31 0,15 2,34
Vel nominal JS -6,24 4,92 -1,64 1,44 -0,42 0,24 -0,16 0,73 -1,29 2,53
Vel nominal DJ -15,87 35,94 -32,08 32,49 -35,45 30,72 -34,56 31,01 -32,27 32,35
Intensidad nominal JS -27,26 13,15 -8,76 6,19 -0,73 2,96 0,53 23,36 -5,37 15,39
Intensidad nominal DJ -25,65 13,33 -7,18 6,45 1,19 3,18 5,09 1,64 -2,92 10,72
Potencia nominal JS -9,28 9,37 -1,86 2,05 -0,57 1,43 -3,30 5,64 -2,51 5,03
Potencia nominal DJ -6,88 8,53 -0,85 1,65 0,03 1,11 1,55 1,26 -0,55 3,81
Factor pot nominal JS 23,00 13,45 5,76 7,13 -1,48 2,80 -4,37 4,79 2,33 10,26
Factor pot nominal DJ 22,32 13,98 4,49 7,39 -2,95 2,99 -4,97 1,80 1,21 10,21
Rendimiento nominal JS 3,99 15,08 2,03 5,12 1,76 1,54 1,63 1,87 2,03 5,73
Rendimiento nominal DJ 5,16 15,19 2,60 4,95 1,97 1,48 1,73 0,91 2,42 5,70
Total 2167 motores
ERROR
0 < P <= 1kW (224
motores)
1 < P <= 10kW (598
motores)
10 < P <= 100kW (804
motores)
100 < P <= 1000kW (541
motores)
mediadesviacion
estandarmedia
desviacion
estandarmedia
desviacion
estandarmedia
desviacion
estandarmedia
desviacion
estandar
Par arranque JS -39,34 44,05 -48,28 30,53 -52,51 25,73 -58,69 21,61 -47,36 34,48
Par arranque DJ -18,53 33,30 -31,36 21,13 -38,29 18,85 -45,28 18,21 -30,21 26,67
Intensidad arranque JS -6,05 40,40 -12,43 21,82 -16,97 25,14 -20,58 22,86 -12,27 30,50
Intensidad arranque DJ -6,05 40,40 -12,43 21,82 -16,97 25,14 -20,58 22,86 -12,27 30,50
Par máximo JS 11,00 27,45 9,35 28,31 7,75 36,69 12,65 48,31 9,68 32,59
Par máximo DJ -6,23 24,00 -7,09 23,72 -7,88 29,20 -3,76 39,31 -6,78 26,96
Par nominal JS -1,55 4,16 -0,75 2,84 -1,26 4,07 -1,46 4,61 -1,22 3,84
Par nominal DJ 0,50 1,41 0,25 1,16 -0,18 3,25 -0,51 3,99 0,15 2,34
Vel nominal JS -0,76 1,55 -0,97 1,57 -1,96 3,34 -2,29 4,06 -1,29 2,53
Vel nominal DJ -33,17 35,18 -33,29 29,80 -30,16 30,96 -32,47 34,30 -32,27 32,35
Intensidad nominal JS -3,76 21,60 -4,22 7,87 -7,85 12,80 -7,44 13,22 -5,37 15,39
Intensidad nominal DJ -1,36 8,66 -1,72 8,38 -5,37 13,34 -5,07 13,50 -2,92 10,72
Potencia nominal JS -2,33 4,48 -1,71 3,35 -3,20 6,02 -3,76 7,50 -2,51 5,03
Potencia nominal DJ 0,19 2,32 -0,18 1,97 -1,37 5,10 -2,04 6,65 -0,55 3,81
Factor pot nominal JS 0,46 9,23 1,45 7,73 4,64 11,90 5,05 13,76 2,33 10,26
Factor pot nominal DJ -0,47 8,42 0,18 7,89 3,48 12,20 3,91 14,26 1,21 10,21
Rendimiento nominal JS 2,57 4,75 1,92 5,03 1,80 7,22 1,07 5,58 2,03 5,73
Rendimiento nominal DJ 2,89 4,57 2,26 5,03 2,27 7,30 1,52 5,58 2,42 5,70
1.000 < To/TM <= 2.273
(167 motores)Total 2167 motores
ERROR
0.300 < To/TM <= 0.800
(716 motores)
0.800 < To/TM <= 0.900
(654 motores)
0.900 < To/TM <= 1.000
(630 motores)

38
8.2.1 Punto operativo
Se observan grandes errores en el par de arranque y en el par máximo para todos los
casos. Sin embargo, los errores en el punto de plena carga son pequeños, excepto, en los
casos donde el motor tiene una potencia a plena carga fraccionada.
La velocidad para el punto de par máximo no es proporcionada por los fabricantes.
Por esta razón, no es posible conocer las características reales del par-velocidad entre el
punto de par máximo y el punto de plena carga.
Así mismo, no es posible conocer los límites de la zona de alrededor del punto de
plena carga, donde las características simuladas del par-velocidad pasan cerca de la
característica real.
Sin embargo, las características simuladas del par-velocidad de los 32 motores
seleccionados del conjunto de los 2.167 motores (representados de las Figuras 3 a la 34),
muestran un comportamiento muy similar entre los dos modelos, el de jaula sencilla y el de
doble jaula, alrededor del punto de plena carga.
8.2.2 Modelo matemático.
En general, el modelo de doble jaula presenta menores errores en comparación con el
modelo de jaula sencilla. Las diferencias son pequeñas en el punto plena carga.
8.2.3 Potencia a plena carga
La mayoría de los errores para la potencia fraccionada a plena carga son grandes
cuando se usan motores con PFL < 1kW. Sin embargo, cuando se analizan los errores de
comportamiento de la potencia a plena carga varía para los diferentes tipos de magnitudes:
par, corriente, rendimiento, etc.
8.2.4 Relación del par To / Tmax
La Tabla 3 se ha realizado para ver si la relación To / Tmax es la correcta para
clasificar los errores. La expectativa era que el modelo de jaula sencilla ofrece grandes
errores cuando la relación To / Tmax es alta, y pequeños errores cuando la relación To / Tmax
es menor. En relación al modelo de doble jaula se esperaba el resultado opuesto.
Finalmente, los resultados muestran que el comportamiento de errores es muy similar para
todos los valores de la relación To / Tmax.
39
9 Conclusiones
En este trabajo se han calculado los parámetros de los modelos de jaula sencilla y
doble jaula, aplicando la técnica de Pedra, para un conjunto de 2.167 motores, a partir
únicamente de los datos facilitados por los fabricantes en sus catálogos.
Para determinar si esta técnica es correcta, se han calculado los errores comparando
los valores de diferentes variables, calculados a partir de los parámetros, con los valores
facilitados por el fabricante en los puntos de funcionamiento de: arranque, par máximo y
plena carga.
La conclusión más importante es que los errores son pequeños en el punto de plena
carga, tanto para los modelos de jaula sencilla y doble jaula, mostrando mejores resultados
para el modelo de doble jaula. Así mismo se ha observado que los errores en el punto de
arranque o inicio, y en el punto de par máximo son grandes.
Esta técnica puede ser utilizada para ambos modelos con buenos resultados si es
aplicada cuando el motor está trabajando alrededor del punto de plena carga, incluso en los
casos en que el motor tiene algunas perturbaciones en el suministro eléctrico: huecos de
tensión, tensión de desequilibrio, etc.
También cabe resaltar la conclusión obtenida comparando los resultados de este
proyecto y los resultados del proyecto del Sr. Angulo, aplicando dos técnicas diferentes de
estimación de parámetros, Haque en el primer caso para el modelo de jaula sencilla y
Pedra en este segundo caso para los modelos de jaula sencilla y doble jaula, se obtiene que
la conclusión más importante es similar, es decir, se tienen errores pequeños para el punto
de plena carga y grandes errores en los puntos de arranque y par máximo.

40
10 Referencias
[1] Adolfo Andrés Jaramillo-Matta y Luís Guasch-Pesquer. Estimación de parámetros para la máquina de
indución trifásica (editorial? Año?).
[2] Adolfo Andrés Jaramillo-Matta, Edison Franco-Mejía y Luís Guasch-Pesquer, Estimación de
parámetros invariantes para un motor de inducción, Dyna, 1978, número 69, pág. 88-94. Revisado el 8
de septiembre de 2011
[3] Bartomeu Angulo Salonen. Cálculo y análisis de los parámetros eléctricos de un conjunto de motores
de inducción. Año 2013
[4] Manuel Cereijo Neira Método para la estimación del momento de inercia de máquinas de inducción
trifásicas a partir de su peso y altura de eje. Septiembre 2011
[5] J. Pedra, F. Córcoles, “Estimation of Induction Motor Double-Cage Model Parameters from Manufacturer
Data”, IEEE, Transactions on energy conversion, Vol. 19, No. 2, June 2004.
[6] Andrés Escobar Mejía, Mauricio Holguin L. y Fabio A. Ocampo Muñoz. Estimación de parámetros
del motor de inducción a partir de los datos del fabricante. Scientia et Technica Año XIV, No 39,
Septiembre de 2008. Universidad Tecnológica de Pereira. ISSN 0122-1701.
[7] Aspectos básicos del Electromagnetismo. Miguel Ángel Rodríguez Pozueta.
http://personales.unican.es/rodrigma/primer/publicaciones.htm
[8] Máquinas asíncronas. Miguel Ángel Roriguez Pozueta
http://personales.unican.es/rodrigma/primer/publicaciones.htm
[9] Constitución de las máquinas eléctricas. Miguel Ángel Rodríguez Pozueta.
http://personales.unican.es/rodrigma/primer/publicaciones.htm