algebra - ejerc resueltos
TRANSCRIPT

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 1/47
Algebra
Algunos Ejercicios Resueltos
Departamento de Matematicas
Universidad de Castilla - La Mancha
E. I. I. Albacete
Septiembre de 2011

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 2/47
ii
5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 3/47
Indice general
1. Numeros Complejos 1
2. Matrices y Determinantes 5
3. Sistemas de Ecuaciones Lineales 9
4. La estructura de Espacio vectorial 13
5. Aplicaciones Lineales 19
6. Diagonalizacion de endomorfismos y matrices 27
7. El espacio vectorial euclıdeo. Aplicaciones ortogonales 35

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 4/47
iv Indice general

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 5/47
Tema 1
Numeros Complejos
5. Determinar dos numeros complejos z1 y z2 que verifiquen simultaneamente:
a ) La suma de sus cuadrados es 3.
b) El cociente z1/z2 es un numero imaginario puro.
c) El modulo de dicho cociente es 2.
Solucion: Del enunciado se desprende que deben verificarse simultaneamente las igual-dades
z21 + z22 = 3,z1z2
= ki,
z1z2
= 2,
y, puesto que |ki| = |k| = 2 debe ser k = ±2.
Por tanto, o bienz1z2
= 2i o bienz1z2
= −2i. Se presentan ası dos casos:
Si z1z2
= 2i, entonces z1 = 2iz2; de la ecuacion z21
+ z22
= 3 se obtiene
z21 + z22 = 3 ⇒ (2iz2)2+z22 = 3 ⇒ −4z22 +z22 = 3 ⇒ z22 = −1 ⇒ z2 = ±√−1 = ±i
Tomando z2 = i se obtiene z1 = −2. Tomando z2 = −i se obtiene z1 = 2.
Si z1z2
= −2i entonces z1 = −2iz2; igualmente se desprende que z2 = ±i, pero ahora,si z2 = i resulta z1 = 2, mientras que si z2 = −i se obtiene z1 = −2.
Por tanto, las cuatro soluciones del ejercicio son
z1 = 2, z2 = i, z1 = −2, z2 = i, z1 = 2, z2 = −i, z1 = −2, z2 = −i.
10. Determinar los complejos z tales que z4 − z = 0.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 6/47
2 Numeros Complejos
Solucion: La ecuacion propuesta puede escribirse como z4 = z. Trabajando en formapolar, si z = (r, θ) entonces z4 = (r4, 4θ) y z = (r, −θ) y podemos expresar la ecuacionpropuesta como
(r4, 4θ) = (r, −θ) ⇔ r4
= r4θ = −θ + 2kπ, k ∈ Z
Por un lado,
r4 = r ⇒ r4 − r = 0 ⇒ r(r3 − 1) = 0 ⇒
r = 0r = 1
Por otro,
4θ + θ = 2kπ, k ∈ Z ⇒ 5θ = 2kπ, k ∈ Z ⇒ θ =2kπ
5, k = 0, 1, 2, 3, 4.
Por tanto, las soluciones son, en forma polar,
z1 = (0, 0) = 0, z2 = (1, 0) = 1, z3 =
1,
2π
5
,
z4 =
1,
4π
5
, z5 =
1,
6π
5
, z6 =
1,
8π
5
.
15. Sean z1 = −1 + i y α ∈ C.
a ) Sabiendo que z1 es raız de la ecuacion
z2 + (−1 + 2i)z + α = 0
hallar la otra raız z2 y el numero complejo α.
b) Hallar los complejos ω tales que z1, z2 y ω sean los vertices de un triangulo equilatero.¿Cuantas soluciones hay?
c) Hallar el area de cada uno de los triangulos anteriores. Calcular la suma de dichasareas.
Solucion:
a ) Como z1 = −1 + i es raız de la ecuacion z2+ (−1 + 2i)z + α = 0, se verifica la igualdadz21 + (−1 + 2i)z1 + α = 0, de donde se obtiene
(−1 + i)2 + (−1 + 2i)(−1 + i) + α = 0
y operando resulta
−2i − 1 − 3i + α = 0 ⇒ α = 1 + 5i.
Ahora que ya conocemos la ecuacion completa, z2+(−1+2i)z +(1+5i) = 0, podemosresolverla para obtener la otra raız. Ası,
z =−(−1 + 2i) ±
(−1 + 2i)2 − 4(1 + 5i)
2=
(1 − 2i) ± √−7 − 24i
2

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 7/47
Numeros Complejos 3
Calculamos√−7 − 24i = a + bi. Elevando al cuadrado, se obtiene la igualdad
−7 − 24i = (a + bi)2 = (a2 − b2) + 2bi, de donde resulta el sistema
−7 = a2
− b2
−24 = 2ab
Despejando a = −12b
se llega a la ecuacion bicuadrada b4 − 7b2 − 144 = 0, de dondese obtiene b2 = 16 o bien b2 = −9.
Esta ultima solucion no tiene sentido en R, mientras que de la igualdad b2 = 16 sededuce que b = ±4 y entonces a = 3.
Por tanto, las raıces buscadas son −3 + 4i y 3 − 4i. Por ultimo, sustituımos en laexpresion anterior para obtener las soluciones
z =(1 − 2i) ± √−7 − 24i
2
=(1 − 2i) ± (−3 + 4i)
2
−1 + i = z1
2 − 3i = z2
Ası, las soluciones de la ecuacion propuesta son z1 = −1+i (como decıa el enunciado)y z2 = 2 − 3i (la que querıamos hallar).
Tambien podıamos haber aplicado la regla de Ruffini para factorizar el polinomio,puesto que conocemos una raız.
b) Hay dos posibles soluciones para w, como se desprende del siguiente dibujo.
Figura 1.1:
Puesto que |z2 − z1| = 5 y el triangulo debe ser equilatero, ambas verifican las condi-ciones
|w − z1| = 5, |w − z2| = 5.
Si hacemos w = x + yi, las condiciones anteriores pueden escribirse como
|w − z1| = |(x + 1) + (y − 1)i| =
(x + 1)2 + (y − 1)2 = 5,
|w − z2| = |(x − 2) + (y + 3)i| =
(x − 2)2 + (y + 3)2 = 5,
de donde resulta el sistema (x + 1)2 + (y − 1)2 = 25(x − 2)2 + (y + 3)2 = 25
Operando, se obtiene x2 + y2 + 2x − 2y = 23x2 + y2 − 4x + 6y = 12

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 8/47
4 Numeros Complejos
y sustituyendo la segunda ecuacion por el resultado de restar dicha ecuacion menosla primera, resulta
x2 + y2 − 4x + 6y = 12
6x − 8y = 11De la segunda ecuacion se obtiene
y =6x − 11
8
y sustituyendo en la primera y operando se llega a la ecuacion
100x2 − 100x − 1175 = 0, o bien 4x2 − 4x − 47 = 0.
Entonces
x = 4 ± √16 + 7528
= 4 ± √7688
= 4 ± 16√38
= 1 ± 4√32
,
y =6 · 1±4
√ 3
2− 11
8=
3 ± 12√
3 − 11
8=
−8 ± 12√
3
8=
−2 ± 3√
3
2.
Por tanto los numeros buscados son
w1 =1 + 4
√3
2+
−2 + 3√
3
2i, w2 =
1 − 4√
3
2+
−2 − 3√
3
2i.
Otra posibilidad de obtener w1 y w2 es (ver figura) hacer un giro con centro en z1.Si giramos z2 un angulo de 60
◦con centro en z1 (multiplicando por 160◦ despues de
hacer la traslacion del origen a z1), se obtiene w1, y si giramos −60◦ (multiplicandopor 1−60◦), se obtiene w2.
c) La suma de dichas areas es el area del rombo de vertices z1, z2, w1, w2. El area de unrombo es
A =D · d
2
donde D = |w2 − w1| es la diagonal mayor, y d = |z2 − z1| es la diagonal menor.
D = |w2 − w1| = |4√
3 + 3√
3i| = 5√
3
d = |z2 − z1| = |3 − 4i| = √25 = 5
Por tanto,
A =5 · 5
√3
2=
25√
3
2.
Como ambos triangulos son iguales, cada uno de ellos tendra un area igual a 25√ 3
4.
Podıamos haber calculado el area de cada uno de los triangulos independientemente,
pues la base de ambos es |z2−z1| = 5 y la altura es |w1−w∗| = 5√ 3
2, siendo w∗ = 1
2−i
el punto medio del segmento determinado por los afijos de z1 y z2.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 9/47
Tema 2
Matrices y Determinantes
4. Sea A ∈ Mn(R). Demuestra las siguientes implicaciones, siendo O la matriz nula e I lamatriz identidad, ambas de orden n.
a ) Si A2 = 0 entonces (I + A)5 = I + 5A.
b) Si A2 = I entonces (I + A)5 = 16(I + A).
c) Si A2
= A entonces (I − A)4
· A = O.
Solucion: Hay que observar que, en general, (A + B)2 = A2 + 2A · B + B2, pues elproducto de matrices no es conmutativo. Entonces,
(A + B)2 = (A + B) · (A + B) = A2 + A · B + B · A + B2 = A2 + 2A · B + B2
Sin embargo, como A · I = I · A = A, en ese caso podemos escribir
(I + A)2 = I 2 + 2I · A + A2 = I + 2A + A2
(I + A)3
= I 3
+ 3I 2
· A + 3I · A2
+ A3
= I + 3A + 3A2
+ A3
(I + A)4 = I + 4A + 6A2 + 4A3 + A4
(I + A)5 = I + 5A + 10A2 + 10A3 + 5A4 + A5
a ) Si A2 = O entonces tambien es An = O para cualquier n ≥ 2, por lo que
(I + A)5 = I + 5A + 10A2 + 10A3 + 5A4 + A5 = I + 5A.
b) Si A2 = I entonces A3 = A2 · A = I · A = A, A4 = A3 · A = A · A = A2 = I y, engeneral, A2n = I , A2n+1 = A, por lo que
(I + A)5 = I + 5A + 10A2 + 10A3 + 5A4 + A5
= I + 5A + 10I + 10A + 5I + A = 16I + 16A = 16(I + A).

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 10/47
6 Matrices y Determinantes
c) Si A2 = A entonces A3 = A · A2 = A · A = A2 = A y, en general, An = A con n ≥ 2.Se verifica que
(I −
A)4 = I −
4A + 6A2
−4A3 + A4 = I
−4A + 6A
−4A + A = I
−A
por lo que (I − A)4 · A = (I − A) · A = A − A2 = A − A = O.
10. Se considera el conjunto de matrices de la forma
M (a,b,c) =
a c bb a + c b + cc b a + c
,
con a, b, c numeros racionales. Se designara este conjunto por N 3(Q). Se pide:
a ) Demostrar que toda matriz de N 3(Q) se escribe de manera unica en la forma
M (a,b,c) = aI + bJ + cK,
donde I es la matriz identidad de M3(Q) y las matrices J y K son independientesde a, b, c.
b) Demostrar que N 3(Q) con las operaciones usuales de suma de matrices y productopor un escalar, es un subespacio vectorial de M3(Q). Hallar la dimension de estesubespacio.
c) Hallar los productos J 2, J · K , K · J , K 2 y comprobar que J 3 = J + I .
Solucion:
a ) Se puede escribir a c b
b a + c b + cc b a + c
=
a 0 0
0 a 00 0 a
+
0 0 b
b 0 b0 b 0
+
0 c 0
0 c cc 0 c
= a 1 0 0
0 1 00 0 1
+ b 0 0 1
1 0 10 1 0
+ c 0 1 0
0 1 11 0 1
Entonces, si llamamos
I =
1 0 0
0 1 00 0 1
, J =
0 0 1
1 0 10 1 0
, K =
0 1 0
0 1 11 0 1
podemos escribir la igualdad
M (a,b,c) = AI + bJ + cK
donde las matrices J y K son constantes (no dependen de a, b y c) y linealmente inde-pendientes, pues no son proporcionales. I es la matriz identidad, tambien linealmenteindependiente de las otras.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 11/47
Matrices y Determinantes 7
b) Que el conjunto N 3(Q) tiene estructura de espacio vectorial con las operacionesusuales de suma de matrices y producto por un escalar se deduce del hecho de quela suma y el producto por un escalar son operaciones internas en N 3(Q) y de que en
el conjunto de matrices M3(Q) se verifican las propiedades de espacio vectorial. Estesegundo hecho es evidente y el primero tambien, pues
M (a,b,c) + M (a, b, c) = M (a + a, b + b, c + c)λ · M (a,b,c) = M (λa,λb,λc)
La dimension de este subespacio es 3, pues cada matriz de el es combinacion linealde los elementos de {I,J,K } que, por consiguiente, forman una base de el.
c) Hagamos los calculos pertinentes.
J 2 = 0 0 1
1 0 10 1 0
· 0 0 11 0 10 1 0
= 0 1 0
0 1 11 0 1
= K
J · K =
0 0 1
1 0 10 1 0
·
0 1 0
0 1 11 0 1
=
1 0 1
1 1 10 1 1
= I + J
K · J =
0 1 0
0 1 11 0 1
·
0 0 1
1 0 10 1 0
=
1 0 1
1 1 10 1 1
= I + J
K 2 = 0 1 00 1 1
1 0 1 ·
0 1 00 1 1
1 0 1 =
0 1 11 1 2
1 1 1 = J + K
Se verifica
J 3 = J · J 2 = J · K = I + J = J + I
14. Determina para que valores de a son invertibles las matrices
A =
a 1 22 a 21 a 1
B =
a 0 1 −11 2 0 20 −3 2 01 a 3 a
Solucion: Para que una matriz sea invertible (tenga inversa) su determinante debe serdistinto de 0. Entonces,
|A| =
a 1 22 a 21 a 1
= a2 + 2 + 4a − 2a − 2 − 2a2 = a(2 − a)
de modo que si a = 0 o a = 2 el determinante de A vale 0 y la matriz A no tiene inversa,mientras que si a = 0 y a = 2 la inversa existe, ya que |A| = 0.
5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 12/47
8 Matrices y Determinantes
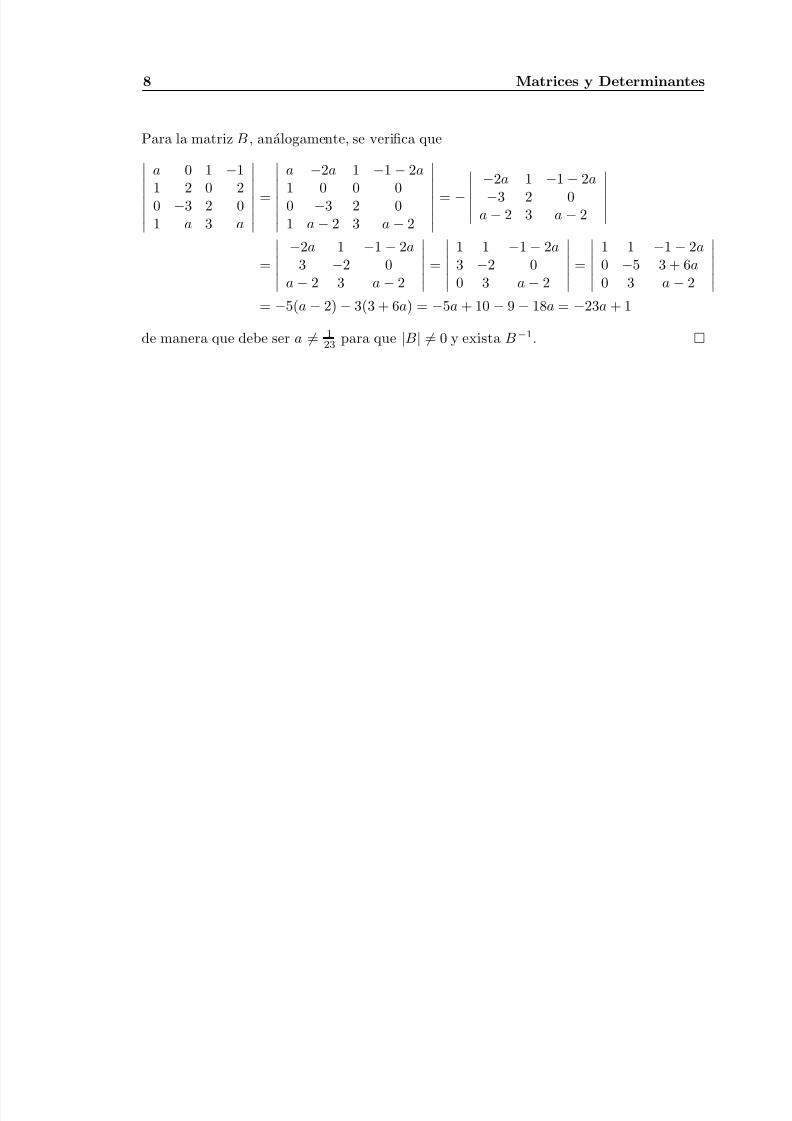
Para la matriz B, analogamente, se verifica que
a 0 1 −1
1 2 0 20 −3 2 01 a 3 a
=
a −2a 1 −1 − 2a
1 0 0 00 −3 2 01 a − 2 3 a − 2
= − −2a 1
−1
−2a
−3 2 0a − 2 3 a − 2
=
−2a 1 −1 − 2a
3 −2 0a − 2 3 a − 2
=
1 1 −1 − 2a3 −2 00 3 a − 2
=
1 1 −1 − 2a0 −5 3 + 6a0 3 a − 2
= −5(a − 2) − 3(3 + 6a) = −5a + 10 − 9 − 18a = −23a + 1
de manera que debe ser a = 1
23para que |B| = 0 y exista B−1.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 13/47
Tema 3
Sistemas de Ecuaciones Lineales
4. Discutase el sistema
x + y + z + 2v = 3x + 2y − 2z + u − 2v = −4
3x − y − 3z − 4u + 4v = 1
Solucion: Calculemos el rango de la matriz ampliada (A|B):
(A|B) =
1 1 1 0 2
1 2 −2 1 −23 −1 −3 −4 4
3
−41
F 2 − F 1F 3 − 3F 1−→
1 1 1 0 20 1 −3 1 −40
−4
−6
−4
−2
3−7
−8
F 3 + 4F 2−→ 1 1 1 0 2
0 1 −3 1 −40 0 −18 0 −18
3
−7−36
Como rang(A|B) = 3 = rang(A), el sistema es compatible indeterminado y equivalente alde ecuaciones
x + y + z + 2v = 3
y − 3z + u − 4v = −7z + v = 2
cuya solucion es
z = 2 − v, y = −1 − u + v, x = 2 + u − 2v,

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 14/47
10 Sistemas de ecuaciones lineales
o bien, haciendo u = λ, v = µ,
x = 2 + λ − 2µy =
−1
−λ + µ
z = 2 − µu = λv = µ
8. Discutase, en funcion de los valores reales del parametro a, el sistema
x + y + z = 34x + az = a2 + 4ax
−y
−z =
−2
Solucion: Calculemos primero el determinante de la matriz A de coeficientes, para es-tudiar su rango
|A| =
1 1 14 0 aa −1 −1
= a2 − 4 + 4 + a = a2 + a = a(a + 1)
• Si a = 0 y a = −1, como det(A) = 0 la matriz A tiene rango 3 y el sistema es com-patible determinado (pues debe ser rang(A|B) = 3). En este caso podemos obtenerla solucion por la regla de Cramer:
x =
3 1 1
a2 + 4 0 a−2 −1 −1
|A| =
a
a(a + 1)=
1
a + 1
y =
1 3 14 a2 + 4 aa −2 −1
|A| =
a(−a2 + 2a − 2)
a(a + 1)=
−a2 + 2a − 2
a + 1
z =
1 1 34 0 a2 + 4a −1 −2
|A| =
a(a2 + a + 4)
a(a + 1)=
a2 + a + 4
a + 1
• Si a = 0, el sistema es
x + y + z = 34x = 4
− y − z = −2
Mediante operaciones elementales sobre la matriz (A|B) obtenemos
1 1 14 0 00 −1 −1
34
−2
F 2 − 4F 1−→ 1 1 1
0 −4 −40 −1 −1
3
−8
−2

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 15/47
Sistemas de ecuaciones lineales 11
y como las dos ultimas filas son proporcionales, el sistema es equivalente a
x + y + z = 3
y + z = 2
que es compatible indeterminado. Haciendo z = λ resulta
x = 1y = 2 − λz = λ
λ ∈ R.
• Si a = −1, el sistema resultante es
x + y + z = 34x − z = 5−x − y − z = −2
que es incompatible, a la vista de la primera y tercera ecuaciones.
12. Discutase, en funcion de los parametros a, b ∈ R, el sistema
3x + y + az = 0x − y − z = 0
bx + y + z = 0x + by − z = 0
Solucion: El sistema es homogeneo, por lo que es compatible. Veamos para que valoresde los parametros es compatible determinado (y por tanto tiene solucion unica x = 0,
y = 0, z = 0), y para cuales es compatible indeterminado.Para ello calculamos el rango de la matriz de coeficientes A cambiando previamente elorden de las ecuaciones
A =
1 −1 −13 1 ab 1 11 b −1
F 2 − 3F 1F 3 − bF 1F 4 − F 1−→
1 −1 −10 4 a + 30 1 + b 1 + b0 b + 1 0
A la vista de dicha matriz podemos decir que si b = −1 entonces rang(A) = 2 paracualquier valor de a, mientras que si b
=
−1 entonces rang(A) = 3 para todo a ya que las
filas primera, tercera y cuarta son independientes.
Por tanto, si b = −1 el sistema tiene solucion unica x = 0, y = 0, z = 0, y si b = −1 esequivalente al sistema
x − y − z = 04y + (a + 3)z = 0
cuya solucion es, tomando z como variable independiente
x = (1 − a)λ
y = −(3 + a)λ
z = 4λ
λ ∈ R.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 16/47
12 Sistemas de ecuaciones lineales

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 17/47
Tema 4
La estructura de Espacio vectorial
8. Dados los vectores de R4 v1 = (1, 1, 0, 0), v2 = (1, 0, 1, 1) y v3 = (0, 0, 1, 0),
a ) Demuestra que son linealmente independientes.
b) Amplıa el sistema {v1, v2, v3} a una base de R4 y halla las coordenadas del vectoru = (2, 1, −1, 0) respecto de dicha base.
Solucion:
a ) Consideremos los vectores v1 = (1, 1, 0, 0), v2 = (1, 0, 1, 1) y v3 = (0, 0, 1, 0) del espaciovectorial R4. Seran linealmente independientes si, y solo si, la matriz
A =
1 1 0 0
1 0 1 10 0 1 0
que forman tiene rango 3 y eso es obvio, pues el menor formado por las tres primeras
columnas de dicha matriz verifica que
|M 33| =
1 1 01 0 10 0 1
= −1 = 0.
b) El vector v4 = (0, 0, 0, 1) ∈ R4 es linealmente independiente de los tres vectores dados,pues desarrollando por la ultima fila el determinante de la matriz cuyas filas son vicon 1 ≤ i ≤ 4 resulta
1 1 0 0
1 0 1 10 0 1 00 0 0 1
= 1 1 01 0 1
0 0 1
= |M 33| = −1 = 0.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 18/47
14 Espacios vectoriales
Dada la base B = {v1, v2, v3, v4} de R4, el vector u = (2, 1, −1, 0) tiene unas coorde-nadas que se obtienen resolviendo el sistema que resulta de la igualdad
(2, 1, −1, 0) = av1
+ bv2
+ cv3
+ dv4
= a(1, 1, 0, 0) + b(1, 0, 1, 1) + c(0, 0, 1, 0) + d(0, 0, 0, 1)
= (a + b,a,b + c, b + d)
es decir,
a + b = 2a = 1
b + c = −1b + d = 0
y son a = 1, b = 1, c = −2, d = −1.
15. En R3 se considera la base B = {(2, 1, 3), (1, 1, 0), (−1, 0, 0)}.
a ) Si el vector v tiene coordenadas (3, 1, −1) en esta base, ¿cuales son sus coordenadasen la base canonica?
b) Si el vector w tiene coordenadas (2, −1, 3) en la base canonica, ¿cuales son sus coor-denadas en la base B?
Solucion: Llamamos C =
{e1, e2, e3
}a la base canonica de R3 y sea
B = {u1, u2, u3} = {(2, 1, 3), (1, 1, 0), (−1, 0, 0)}la base dada. Entonces,
La expresion de v en la base C es inmediata:
v = 3u1 + u2 − u3 = 3(2, 1, 3) + (1, 1, 0) − (−1, 0, 0) = (8, 4, 9)C .
La expresion de w en B es menos directa; por hipotesis,
w = (2, −1, 3)C = 2e1 − e2 + 3e3.
Por otra parte, w debe expresarse tambien en la base B,
w = λ1u1 + λ2u2 + λ3u3
= λ1(2e1 + e2 + 3e3) + λ2(e1 + e2) + λ3(−e1)
= (2λ1 + λ2 − λ3)e1 + (λ1 + λ2)e2 + 3λ1e3
Igualando ambas expresiones resulta el sistema
2λ1 + λ2 − λ3 = 2
λ1 + λ2 = −13λ1 = 3
cuya solucion es λ1 = 1, λ2 = −2, λ3 = −2.
Por tanto, w = (1, −2, −2)B.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 19/47
Espacios vectoriales 15
Podıamos haber hecho el ejercicio utilizando matrices. Si llamamos P a la matriz de pasode la base B a la base C entonces P −1 es la matriz de paso de C a B. La matriz P seobtiene directamente, pues sus columnas son las coordenadas de los vectores de la base B
expresados en la base C . Por tanto,
P =
2 1 −1
1 1 03 0 0
y P −1 =
0 0 1/3
0 1 −1/3−1 1 1/3
.
La ecuacion X C = P ·X B nos da las coordenadas en C cuando conocemos las coordenadasen B (apartado a ) del ejercicio). La ecuacion X B = P −1 · X C da las coordenadas en Bcuando conocemos las coordenadas en C (apartado b)).
21. Hallar una base, la dimension, unas ecuaciones parametricas y unas implıcitas de M , N ,
M ∩ N y M + N , siendo M y N los subespacios de R4 definidos por
M = {(x,y ,z ,t) ∈ R4 :(x,y ,z ,t) = (α + 3β + 2γ, 3α − β + γ, α + β + γ, −5β + 2γ ), α , β , γ ∈ R}
N = {(x,y ,z ,t) ∈ R4 : x + y + z + t = 0, y − z − t = 0, x + 4y − 2z − 2t = 0}
Solucion: El subespacio M esta definido por sus ecuaciones parametricas. Se obtiene deinmediato un sistema de generadores de M . Es
{(1, 3, 1, 0), (3, −1, 1, −5), (2, 1, 1, 2)}
Estudiando el rango de la matriz que forman se deduce que los vectores son linealmenteindependientes, por lo que dim(M ) = 3 y dichos vectores son una base de M , por lo quepodemos escribir M = (1, 3, 1, 0), (3, −1, 1, −5), (2, 1, 1, 2).
Para hallar una base de N tenemos que resolver el sistema que forman las ecuacionesimplıcitas que definen dicho subespacio.
x + y + z + t = 0y − z − t = 0x + 4y − 2z − 2t = 0
El sistema es compatible indeterminado. Si a la segunda ecuacion se le resta la primera seobtiene el triple de la tercera, por lo que equivale a
x + y + z + t = 0y − z − t = 0
⇔
x + y = −z − ty = z + t
Haciendo z = α, t = β se obtiene y = α + β, x = −2α − 2β, por lo que dim(N ) = 2 y{(−2, 1, 1, 0), (−2, 1, 0, 1)} es una base de N . Por tanto, N = (−2, 1, 1, 0), (−2, 1, 0, 1).
Ya tenemos todo lo necesario para hacer el problema.
Para el subespacio M :
• Base y dimension:Ya las hemos calculado antes. La dimension es dim(M ) = 3 y una base de M esBM = {(1, 3, 1, 0), (3, −1, 1, −5), (2, 1, 1, 2)}.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 20/47
16 Espacios vectoriales
• Ecuaciones parametricas:
Son las que da el enunciado,
x = α + 3β + 2γ y = 3α − β + γ
z = α + β + γ t = −5β + 2γ
.
• Ecuaciones implıcitas: Se obtienen de las parametricas eliminando los parametros(una vez que sabemos que son independientes, pues dim(M ) = 3). Entonces,
debemos resolver el sistema
α + 3β + 2γ = x3α − β + γ = yα + β + γ = z
−5β + 2γ = t
1 1 1 z1 3 2 x
3 −1 1 y0 −5 2 t
F 2 − F 1
F 3 − 3F 1
−→ 1 1 1 z0 2 1 x
−z
0 −4 −2 y − 3z0 −5 2 t
F 3 + 2F 2F 4 − 2F 2−→
1 1 1 z0 2 1 x − z0 0 0 2x + y − 5z0 −9 0 t − 2x + 2z
Por tanto, la ecuacion implıcita de M es 2x + y − 5z = 0, es decir,
M = {(x,y ,z ,t) ∈ R4 : 2x + y − 5z = 0}.
Para el subespacio N :
• Base y dimension:Como sabemos, dim(N ) = 2 y BN = {(−2, 1, 1, 0), (−2, 1, 0, 1)} es una base deN .
• Ecuaciones parametricas:
A partir de la base se obtienen unas ecuaciones parametricas,
x = −2α − 2βy = α + βz = αt = β
• Ecuaciones implıcitas:
Se dan en el enunciado. Son x + y + z + t = 0, y − z − t = 0, que permiten escribirN = {(x,y ,z ,t) ∈ R4 : x + y + z + t = 0, y − z − t = 0} (Hemos comprobadoque la ultima ecuacion del enunciado depende de las otras dos, por lo que no esnecesaria).
Para el subespacio M ∩ N :
• Ecuaciones implıcitas: Se obtienen a partir de las de los subespacios M y N . Son
2x + y − 5z = 0x + y + z + t = 0y − z − t = 0
Si resolvemos el sistema se obtendran unas ecuaciones parametricas de M ∩ N .• Ecuaciones parametricas: Como el sistema es homogeneo, no hace falta escribir
la matriz ampliada, que tendra, seguro, el mismo rango que la de los coeficientes.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 21/47
Espacios vectoriales 17
Dicha matriz de coeficientes es (reordenando las ecuaciones)
1 1 1 1
0 1 −1 −12 1 −5 0 F 3
−2F 1
−→ 1 1 1 1
0 1 −1 −10 −1 −7 −2 F 3+F 2
−→ 1 1 1 1
0 1 −1 −10 0 −8 −3
por lo que el sistema precedente equivale a
x + y + z + t = 0y − z − t = 0−8z − 3t = 0
y su solucion, haciendo t = λ, es x = −108
λ, y = 5
8λ, z = −3
8λ, t = λ. Si utilizamos
como parametro 8µ = λ podemos expresar las ecuaciones parametricas como
x = −10µy = 5µz = −3µt = 8µ
• Base y dimension:Como las ecuaciones parametricas se expresan con solo un parametro, la dimen-sion del subespacio es dim(M ∩ N ) = 1 y una base es {(−10, 5, −3, 8)}.
Para el subespacio M + N :
El subespacio M + N puede hallarse directamente, pues esta generado por el sis-tema formado por una base de M junto con una de N , es decir, esta generado por
{(1, 3, 1, 0), (3, −1, 1, −5), (2, 1, 1, 2), (−2, 1, 1, 0), (−2, 1, 0, 1)}. Solo faltarıa ver cual esel rango de este sistema.
Sin embargo es mas facil tener en cuenta la formula de las dimensiones, pues
dim(M + N ) + dim(M ∩ N ) = dim(M ) + dim(N )
de donde se deduce que dim(M + N ) = 4 y por tanto, M + N = R4. Entonces, sitomamos la bsae {1, 0, 0, 0), (0, 1, 0, 0), (0, 0, 1, 0), (0, 0, 0, 1)} para M +N se sigue que:
• Ecuaciones parametricas:Son x = α, y = β, z = γ , t = δ.
• Ecuaciones implıcitas:No tiene sentido. (Al subespacio M + N pertenecen todos los vectores del espaciovectorial).
• Base y dimension:Como dim(M + N ) = 4, cualquier base de R4 es base de M + N .
32. En R3 se consideran los subespacios
U = {(x,y ,z) : z = 0} V = (0, 1, 1), (2, 0, 1), (2, 1, 2)Halla la dimension y una base de los subespacios U , V , U + V y U ∩ V .

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 22/47
18 Espacios vectoriales
Solucion: El subespacio U tiene dimension 2. Una base de U es BU = {(1, 0, 0), (0, 1, 0)},formada por dos vectores linealmente independientes que verifican la ecuacion de U .
Por otra parte, como (0, 1, 1) y (2, 0, 1) no son proporcionales, son linealmente independi-
entes, y (2, 1, 2) = (0, 1, 1)+(2, 0, 1), de manera que V = (0, 1, 1), (2, 0, 1) tiene dimension2 y BV = {(0, 1, 1), (2, 0, 1)} es una base de V .
Puesto que tenemos bases de ambos subespacios, podemos escribir que
U + V = (1, 0, 0), (0, 1, 0), (0, 1, 1), (2, 0, 1)
Los tres primeros vectores que generan U + V son linealmente independientes, luegodim(U + V ) = 3. Una base de U + V es BU +V = {(1, 0, 0), (0, 1, 0), (0, 1, 1)}.
Puesto que estamos en R3 y dim(U +V ) = 3 podemos deducir que U +V = R3 y podrıamoshaber tomado la base canonica tambien.
De la formula de las dimensiones, que podemos escribir como
dim(U ∩ V ) = dim(U ) + dim(V ) − dim(U + V )
podemos deducir que dim(U ∩ V ) = 1.
Tenemos una ecuacion implıcita de U . Unas ecuaciones parametricas de V son
x = 2βy = αz = α + β
de donde se obtiene β =x
2 , α = y y por tanto z = y +x
2 , o bien x + 2y − 2z = 0.Entonces las ecuaciones z = 0, x + 2y − 2z = 0 son unas ecuaciones implıcitas de U ∩ V .Resolviendo el sistema que forman, se obtienen unas ecuaciones parametricas de U ∩ V ,que son
x = −2λy = λz = 0
de modo que dim(U ∩ V ) = 1 como sabıamos y BU ∩V = {(−2, 1, 0)} es una base de U ∩ V .
5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 23/47
Tema 5
Aplicaciones Lineales
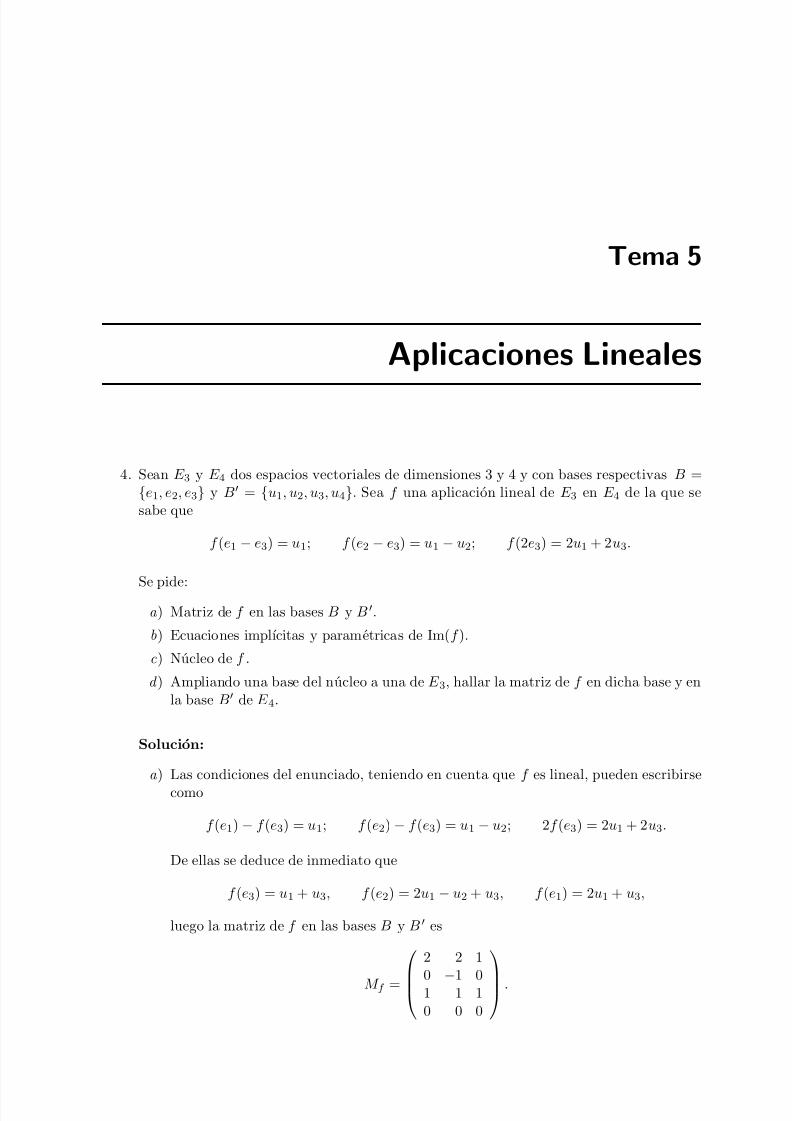
4. Sean E 3 y E 4 dos espacios vectoriales de dimensiones 3 y 4 y con bases respectivas B ={e1, e2, e3} y B = {u1, u2, u3, u4}. Sea f una aplicacion lineal de E 3 en E 4 de la que sesabe que
f (e1 − e3) = u1; f (e2 − e3) = u1 − u2; f (2e3) = 2u1 + 2u3.
Se pide:
a ) Matriz de f en las bases B y B.
b) Ecuaciones implıcitas y parametricas de Im(f ).
c) Nucleo de f .
d ) Ampliando una base del nucleo a una de E 3, hallar la matriz de f en dicha base y enla base B de E 4.
Solucion:
a ) Las condiciones del enunciado, teniendo en cuenta que f es lineal, pueden escribirsecomo
f (e1) − f (e3) = u1; f (e2) − f (e3) = u1 − u2; 2f (e3) = 2u1 + 2u3.
De ellas se deduce de inmediato que
f (e3) = u1 + u3, f (e2) = 2u1 − u2 + u3, f (e1) = 2u1 + u3,
luego la matriz de f en las bases B y B es
M f =
2 2 1
0 −1 01 1 10 0 0
.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 24/47
20 Aplicaciones Lineales
b) Sabemos que
Im(f ) = f (e1), f (e2), f (e3) = 2u1 + u3, 2u1 − u2 + u3, u1 + u3=
(2, 0, 1, 0)B , (2,
−1, 1, 0)B , (1, 0, 1, 0)B
y, puesto que
rang
2 0 1 0
2 −1 1 01 0 1 0
= 3
se deduce que dim(Im(f )) = 3. Unas ecuaciones parametricas son
x = 2a + 2b + cy = −bz = a + b + ct = 0
de donde se obtiene la ecuacion implıcita, t = 0. Ası,Im(f ) = {xu1 + yu2 + zu3 + tu4 : t = 0}
c) De la igualdad dim(Ker(f )) + dim(Im(f )) = dim(E 3) = 3 se deduce que
dim(Ker(f )) = 0
y por tanto Ker(f ) = {0}.
d ) Puesto que Ker(f ) = {0}, la cuestion no tiene sentido.
8. Se consideran los espacios vectoriales E , F y G siendo E el espacio vectorial de los poli-nomios de grado menor o igual que 1, F las matrices simetricas de orden 2 y G = R3. Sedefinen las aplicaciones
f : E −→ F g : F −→ G
f (ax + b) =
a bb a
g
a bb c
= (a,c,a + c)
Sean B = {x, 1}, B =
1 00 0
0 11 0
0 00 1
y B = {(1, 0, 0), (0, 1, 0), (0, 0, 1)}
las bases canonicas de E , F y G.
a ) Demostrar que f y g son lineales.
b) Hallar las matrices de los homomorfismos f , g y g ◦ f en las bases anteriores.
c) Calcular el subespacio (g ◦ f )(V ) siendo V el subespacio de E
V = {ax + a : a ∈ R}
d ) Si en F utilizamos la base B∗ =
1 00 1
0 11 0
1 00 −1
, hallar las ma-
trices de f , g y g ◦ f en las bases B, B∗ y B.e) Utilizando la expresion matricial del cambio de coordenadas de B a B
∗ hallar las
coordenadas de la matriz 2 −3
−3 5 en la base B
∗.
f ) Hallar g−1(2, 2, 4), g−1(1, 3, 0), f −1
1 22 1
.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 25/47
Aplicaciones Lineales 21
Solucion:
a ) Se deja como ejercicio. Basta aplicar la correspondiente caracterizacion.
b) Puesto que
f (x) =
1 00 1
= (1, 0, 1)B f (1) =
0 11 0
= (0, 1, 0)B
la matriz de f respecto de las bases B y B es
M BB (f ) =
1 0
0 11 0
Analogamente,
g
1 00 0
= (1, 0, 1)B g
0 11 0
= (0, 0, 0)B g
0 00 1
= (0, 1, 1)B
de donde resulta que la matriz de g respecto de las bases B y B es
M BB(g) =
1 0 0
0 0 11 0 1
Por tanto,
M BB (g
◦f ) = M BB(g)
·M BB (f ) =
1 01 0
2 0
La matriz M BB (g◦f ) puede hallarse tambien directamente, calculando y expresandoadecuadamente los elementos (g ◦ f )(x) y (g ◦ f )(1).
c) V = {ax + a : a ∈ R} = x + 1. Por tanto,
(f ◦ g)(V ) = (f ◦ g)(x + 1) = f (g(x + 1)) = (1, 1, 2)
d ) Para hallar la matriz de f en las bases B y B∗, debemos observar que
f (x) =
1 00 1
= (1, 0, 0)B
∗f (1) =
0 11 0
= (0, 1, 0)B
∗
de modo que
M BB ∗
(f ) =
1 0
0 10 0
Analogamente, para hallar la matriz de g en las bases B∗ y B hemos de observarque
g
1 00 1
= (1, 1, 2)B g
0 11 0
= (0, 0, 0)B g
1 00 −1
= (1, −1, 0)B
de donde se sigue que
M B∗B
(g) =
1 0 11 0 −12 0 0

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 26/47
22 Aplicaciones Lineales
La matriz de g ◦ f no cambia, aunque la calculemos a partir de la base intermediaB∗, pues las bases del espacio vectorial inicial y del final no han cambiado; es
M BB (g◦
f ) = M B
∗
B(g)·
M BB
∗
(f ) = M BB(g)·
M BB (f )
e) Para hallar la matriz M BB∗
de cambio de base de B a B∗ necesitamos obtener lascoordenadas de los elementos de la base B expresados en funcion de la base B
∗.Entonces:
1 00 0
=
1
2
1 00 1
+
1
2
1 00 −1
=
1
2, 0,
1
2
B∗
0 11 0
= 1
0 11 0
= (0, 1, 0)B
∗
0 00 1 =
1
2 1 00 1 − 1
2 1 00
−1 =
1
2, 0, −1
2B
∗
Por tanto, M BB∗
=
1/2 0 1/2
0 1 01/2 0 −1/2
.
La expresion matricial del cambio de base viene dada por la expresi on
M BB∗· X B = X B
∗,
donde X B es la matriz columna de las coordenadas de un vector de F en la base B
y X B∗
es la matriz columna de las coordenadas del mismo vector en la base B∗.
Puesto que se verifica 2 −3−3 5
= (2, −3, 5)B ,
las coordenadas en la base B∗ se obtienen a partir de la anterior expresion matricial,
y resulta
M BB∗· X B =
1/2 0 1/2
0 1 01/2 0 −1/2
·
2
−35
=
7/2
−3−3/2
Ası pues,
2 −3
−3 5 = (2, −3, 5)B =
7
2, −3, −3
2B
∗
f ) Para hallar g−1(2, 2, 4) hay que resolver el sistema que matricialmente se expresa por 1 0 0
0 0 11 0 1
·
x
yz
=
2
24
Resulta
x = 2z = 2
x + z = 4⇒
x = 2y = λz = 2
Por tanto,
g−1(2, 2, 4) = {(2, λ, 2)B : λ ∈ R} =
2 λλ 2
: λ ∈ R
.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 27/47
Aplicaciones Lineales 23
Observese que g−1(2, 2, 4) no es un subespacio vectorial.
Del mismo modo, para hallar g−1(1, 3, 0) hay que resolver el sistema que se obtienede 1 0 0
0 0 11 0 1
· x
yz
=
130
Dicho sistema es incompatible, de modo que g−1(1, 3, 0) = ∅.
Por ultimo, para hallar f −1
1 22 1
= f −1((1, 2, 1)B) hay que resolver el sistema
que matricialmente se expresa como
1 00 1
1 0 ·
x
y =
12
1
Resulta
x = 1y = 2
x = 1⇒
x = 1y = 2
Por tanto, f −1
1 22 1
= {x + 2}, es un conjunto unitario.
1. Sea P 3(x) = R3[x] el espacio vectorial real de los polinomios de grado menor o igual que3 con coeficientes en R, y M2(R) el espacio vectorial real de las matrices cuadradas detamano 2 definidas sobre R.
Consideremos la aplicacion f : P 3(x) −→ M2(R) definida por
f (a + bx + cx2 + dx3) =
d c + b
c − b a
a ) Comprobar que es lineal.b) Demostrar que B = {1, 1 + x, 1 + x3, x + x2} es una base de P 3(x).
c) Obtener una base B del subespacio de M2(R) siguiente:
H =
d c + b
c − b a
: a,b,c,d ∈ R
.
¿Es B una base de M2(R)?
d ) En caso de ser afirmativa la respuesta al apartado anterior, hallar la expresion ma-tricial de f referida a las bases B y B.
e) Calcular Ker(f ) e Im(f ).
f ) Clasificar f .

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 28/47
24 Aplicaciones Lineales
Solucion:
a ) Dados a + bx + cx2 + dx3, a + bx + cx2 + dx3 ∈ P 3(x), se verifica que
f ((a + bx + cx2 + dx3) + (a + bx + cx2 + dx3))
= f ((a + a) + (b + b)x + (c + c)x2 + (d + d)x3)
=
d + d c + c + b + b
c + c − (b + b) a + a
=
d c + b
c − b a
+
d c + b
c − b a
= f (a + bx + cx2 + dx3) + f (a + bx + cx2 + dx3)
de modo que f es lineal para la suma.
Dados a + bx + cx2 + dx3 ∈ P 3(x), λ ∈ R, resulta
f (λ(a + bx + cx2
+ dx3
)) = f (λa + λbx + λcx2
+ λdx3
)
=
λd λc + λb
λc − λb λa
= λ
d c + b
c − b a
= λf (a + bx + cx2 + dx3)
y f es lineal tambien para el producto por un escalar; ambas propiedades demuestranque f es lineal.
b) Como dim(P 3(x)) = 4, para comprobar que B es base basta observar que los vectoresde B son linealmente independientes y eso es inmediato, ya que en B hay un polinomiode cada grado; concretando mas, si consideramos la base C = {1, x , x2, x3} de P 3(x)e identificamos cada vector de B con sus coordenadas en C , resulta que
1 ≡ (1, 0, 0, 0)C 1 + x ≡ (1, 1, 0, 0)C
1 + x3 ≡ (1, 0, 0, 1)C x + x2 ≡ (0, 1, 1, 0)C
y como 1 0 0 01 1 0 01 0 0 10 1 1 0
=
1 0 00 0 11 1 0
=
0 11 0
= −1 = 0
los vectores de B son, efectivamente, linealmente independientes y forman una basede P 3(x).
c) Un sistema de generadores de H es trivialmente el sistema
B =
0 00 1
,
0 1
−1 0
,
0 11 0
,
1 00 0
que es ademas base, pues los vectores de B son linealmente independientes.
Como dim(H ) = 4 = dim(M2(R)), se deduce que H = M2(R) y B es tambien basede M2(R).
d ) Obtenemos las imagenes por f de los elementos de la base B.
f (1) = 0 0
0 1
= (1, 0, 0, 0)B
f (x) = 0 1
−1 0
= (0, 1, 0, 0)B
f (x2) =
0 11 0
= (0, 0, 1, 0)B f (x3) =
1 00 0
= (0, 0, 0, 1)B

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 29/47
Aplicaciones Lineales 25
Ası, la matriz de f respecto de las bases B y B es
M BB (f ) =
1 0 0 0
0 1 0 00 0 1 00 0 0 1
= I 4.
e) Puesto que dim(Im(f )) = rang(M BB (f )) = 4, se sigue que
Im(f ) = H = M2×2(R).
De la formula de las dimensiones se deduce que Ker(f ) = {0}.
f ) f es un isomorfismo, pues es un homomorfismo biyectivo ya que, como vimos en elapartado anterior, Ker(f ) = {0} e Im(f ) = M2×2(R).

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 30/47
26 Aplicaciones Lineales
5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 31/47
Tema 6
Diagonalizacion de endomorfismos y
matrices
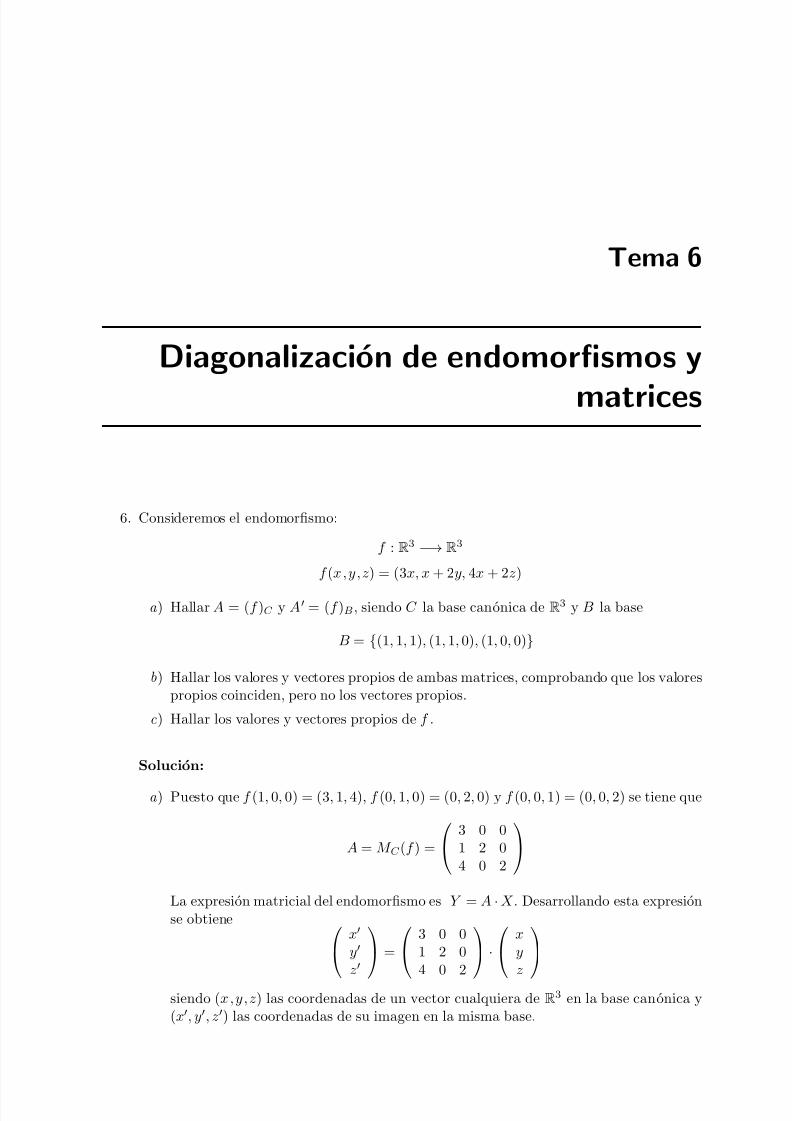
6. Consideremos el endomorfismo:
f : R3 −→ R3
f (x,y ,z) = (3x, x + 2y, 4x + 2z)
a ) Hallar A = (f )C y A = (f )B , siendo C la base canonica de R3 y B la base
B = {(1, 1, 1), (1, 1, 0), (1, 0, 0)}
b) Hallar los valores y vectores propios de ambas matrices, comprobando que los valorespropios coinciden, pero no los vectores propios.
c) Hallar los valores y vectores propios de f .
Solucion:
a ) Puesto que f (1, 0, 0) = (3, 1, 4), f (0, 1, 0) = (0, 2, 0) y f (0, 0, 1) = (0, 0, 2) se tiene que
A = M C (f ) =
3 0 0
1 2 04 0 2
La expresion matricial del endomorfismo es Y = A · X . Desarrollando esta expresionse obtiene
x
y
z
=
3 0 01 2 04 0 2
·
xyz
siendo (x,y ,z) las coordenadas de un vector cualquiera de R3 en la base canonica y(x, y, z) las coordenadas de su imagen en la misma base.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 32/47
28 Diagonalizacion
Para hallar A debemos considerar la base B:
f (1, 1, 1) = (3, 3, 6) = 6(1, 1, 1) − 3(1, 1, 0) + 0(1, 0, 0) = (6, −3, 0)Bf (1, 1, 0) = (3, 3, 4) = 4(1, 1, 1)
−1(1, 1, 0) + 0(1, 0, 0) = (4,
−1, 0)B
f (1, 0, 0) = (3, 1, 4) = 4(1, 1, 1) − 3(1, 1, 0) + 2(1, 0, 0) = (4, −3, 2)B
Luego la matriz de f en la base B es
A = M B(f ) =
6 4 4
−3 −1 −30 0 2
Ahora, la expresion matricial del endomorfismo en esta base es Y = A · X , y estaexpresion en forma desarrollada resulta
x
y
z =
6 4 4
−3
−1
−3
0 0 2 ·
xy
z
donde (x,y ,z) son las coordenadas de un vector cualquiera de R3 en la base B y(x, y, z) las coordenadas de su imagen tambien en la base B.
b.1) Calculemos los valores propios de A.
|A − λ · I | =
3 − λ 0 0
1 2 − λ 04 0 2 − λ
= (2 − λ)2 · (3 − λ)
Por tanto los valores propios de la matriz A son λ = 2 (doble) y λ = 3 (simple).
Hallemos los vectores propios de A.
V (2) = {X : (A − 2I )X = 0}. Desarrollando la igualdad 1 0 0
1 0 04 0 0
·
x
yz
=
0
00
se obtiene la ecuacion x = 0, cuya solucion se expresa como
x = 0y = λz = µ
Ası, V (2) ={
(0, λ , µ) : λ, µ∈R
}=
(0, 1, 0), (0, 0, 1)
.
Del mismo modo, V (3) = {X : (A − 3I )X = 0}. La expresion 0 0 0
1 −1 04 0 −1
·
x
yz
=
0
00
da lugar al sistema x − y = 0
4x − z = 0
de solucion
x = λ
y = λz = 4λ
Entonces V (3) = {(λ,λ, 4λ) : λ ∈ R} = (1, 1, 4).

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 33/47
Diagonalizacion 29
b.2) Los valores y vectores propios de A se calculan de manera semejante.
|A − λ · I | =
6 − λ 4 4
−3 −1 − λ −30 0 2 − λ = (2 − λ)
6
−λ 4
−3 −1 − λ
= (2 − λ) · (λ2 − 5λ − 6 + 12)
= (2 − λ) · (λ2 − 5λ + 6) = −(λ − 2)2 · (λ − 3)
Por tanto los valores propios de la matriz A son, como los de A, λ = 2 (doble) yλ = 3 (simple).
Hallemos los vectores propios de A.V (2) = {X : (A − 2I )X = 0}. Desarrollando
4 4 4−3 −3 −30 0 0
· x
yz
= 0
00
resulta la ecuacion x + y + z = 0, cuya solucion se expresa como
x = −λ − µy = λz = µ
Entonces V (2) = {(−λ − µ,λ,µ) : λ, µ ∈ R} = (−1, 1, 0), (−1, 0, 1).
Analogamente, V (3) = {X : (A − 3I )X = 0}. De 3 4 4
−3 −4 −30 0 −1
·
x
yz
=
0
00
se obtiene
3x + 4y + 4z = 0−3x − 4y − 3z = 0
− z = 0
cuya solucion es
x = −4/3λy = λz = 0
Entonces V (3) = {((−4/3)λ,λ, 0) : λ ∈ R} = (−4, 3, 0).
b) Los valores propios de f son los valores propios de cualquiera de las matrices de f enuna base prefijada, por tanto son λ = 2 (doble), λ = 3 (simple).
c.1) Los vectores propios de la matriz A son las coordenadas de los vectores propios delendomorfismo f en la base canonica de R3. Obviamente los vectores (0, 1, 0), (0, 0, 1)y (1, 1, 4) son las coordenadas de los vectores (0, 1, 0), (0, 0, 1) y (1, 1, 4) en la base
canonica. Ası los subespacios propios del endomorfismo f son
V (2) = (0, 1, 0), (0, 0, 1), V (3) = (1, 1, 4).

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 34/47
30 Diagonalizacion
c.2) Si para hallar los vectores propios de f nos ayudamos de los resultados obtenidos enel apartado b.2 ), razonaremos como sigue:
Los vectores propios de la matriz A son las coordenadas, en la base B, de los vectores
propios del endomorfismo f . Hallemos los vectores v1, v2 y v3 cuyas coordenadas enla base B son (−1, 1, 0), (−1, 0, 1) y (−4, 3, 0).
v1 = (−1, 1, 0)B = −1 · (1, 1, 1) + 1 · (1, 1, 0) + 0 · (1, 0, 0) = (0, 0, −1)C v2 = (−1, 0, 1)B = −1 · (1, 1, 1) + 0 · (1, 1, 0) + 1 · (1, 0, 0) = (0, −1, −1)C v3 = (−4, 3, 0)B = −4 · (1, 1, 1) + 3 · (1, 1, 0) + 0 · (1, 0, 0) = (−1, −1, −4)C
De este modo tenemos que los subespacios propios de f , expresados en la base C , son
V (2) = (0, 0, −1), (0, −1, −1), V (3) = (−1, −1, −4).
De forma sencilla se comprueba que estos subespacios V (2) y V (3) coinciden con los
obtenidos anteriormente en el apartado c.1).Por tanto los subespacios de vectores propios de f son
V (2) = (0, 1, 0)C , (0, 0, 1)C = (−1, 1, 0)B, (−1, 0, 1)B,
V (3) = (1, 1, 4)C = (−4, 3, 0)B.
11. Diagonalizar el endomorfismo f : R3 −→ R3 definido por
f (e1) = 2e1 − 13
e2 + 23
e3 f (e2) = 53
e2 + 23
e3 f (e3) = e1 + 13
e2 + 73
e3
donde {e1, e2, e3} es una base de R3.
Solucion: La matriz de f en la base dada es
A =
2 0 1
−1/3 5/3 1/32/3 2/3 7/3
.
Su polinomio caracterıstico resulta
|A − λ · I | =
2 − λ 0 1−1/3 5/3 − λ 1/32/3 2/3 7/3 − λ
C 1−C 2=
2 − λ 0 1
−2 + λ 5/3 − λ 1/30 2/3 7/3 − λ
F 3+F 1=
2 − λ 0 1
0 5/3 − λ 4/30 2/3 7/3 − λ
= (2 − λ)
5/3 − λ 4/32/3 7/3 − λ
= (2 − λ)
5
3− λ
7
3− λ
− 8
9
= (2 − λ)(λ2 − 4λ + 3)
= (2
−λ)(λ
−1)(λ
−3)
Como los valores propios son distintos, f es diagonalizable. La expresion diagonal de f viene dada, en una cierta base (la base no se pide; no obstante, puede comprobarse sin

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 35/47
Diagonalizacion 31
dificultad que es {(1, 1, −1), (1, −1, 0), (1, 0, 1)}; dicha base proporciona la matriz de pasoP ), por la matriz
D = 2 0 0
0 1 00 0 3
.
23. Sea h un endomorfismo de R3 del que sabemos:
El subespacio {(x1, x2, x3) ∈ R3 : x2 + x3 = 0} es de vectores propios.
El polinomio caracterıstico de h es −x(x − 1)2.
(0, 1, 0) es un vector propio.
Se pide:
a ) Obtener la expresion matricial de h.
b) Hallar su polinomio mınimo.
c) ¿Es h inversible? En caso de serlo, calcular la inversa de la matriz de h, obtenida enel apartado a ), usando el teorema de Cayley-Hamilton.
Solucion:
a ) Llamemos S al subespacio dado. Entonces
S = {(x1, x2, x3) ∈ R3
: x2 + x3 = 0} = (1, 0, 0), (0, 1, −1).
Los vectores (1, 0, 0) y (0, 1, −1) son vectores propios asociados a un mismo valorpropio. Como el polinomio caracterıstico de h es p(x) = −x(x − 1)2, los valorespropios son λ = 0 y λ = 1, doble.
Por tanto los vectores de S son vectores propios de valor propio λ = 1, por lo que
h(1, 0, 0) = (1, 0, 0) y h(0, 1, −1) = (0, 1, −1).
Ademas, como (0, 1, 0) /∈ S y es un vector propio, debe ser
h(0, 1, 0) = 0·
(0, 1, 0) = (0, 0, 0).
De esas igualdades se deduce que
h(1, 0, 0) = (1, 0, 0), h(0, 1, 0) = (0, 0, 0), h(0, 0, 1) = (0, −1, 1).
La expresion matricial de h es 1 0 0
0 0 −10 0 1
·
x
yz
=
x
y
z
es decir, h(x,y ,z) = (x, y, z) = (x, −z, z),
donde (x,y ,z) ∈ R3 y (x, y, z) = h(x,y ,z) es la imagen de (x,y ,z).

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 36/47
32 Diagonalizacion
b) Como A2 = A, el polinomio mınimo de h es ϕ(λ) = λ2 − λ = λ(λ − 1).
c) Puesto que se verifica que |A| = 0, el endomorfismo h no es invertible. Igualmente seobserva que h no es invertible pues su polinomio mınimo, ϕ(λ) = λ2
−λ, tiene nulo su
termino independiente, lo que significa que tambien es nulo el termino independientedel polinomio caracterıstico que, como sabemos, coincide con el valor del determinantede la matriz.
24 Dada la matriz A =
0 0 0 10 0 0 1
1/2 1/2 0 01 0 0 0
∈ M4(R),
a ) Calcular su polinomio caracterıstico.
b) ¿Existe una matriz P tal que P −1 · A · P sea diagonal?
• Si existe P , dar explıcitamente esta matriz.
• Si no existe P , dar explıcitamente, si es posible, la forma canonica de Jordan deA.
c) Calcular su polinomio mınimo.
d ) Dar una base y la dimension del espacio vectorial engendrado por {I , A , A2, . . . , An, . . . }(como subespacio vectorial del espacio vectorial real (M4(R), +)).
Solucion:
a ) El polinomio caracterıstico de A es p(λ) = |A − λI |. Desarrollando por los elementosde la tercera columna, resulta que
−λ 0 0 10 −λ 0 1
1/2 1/2 −λ 01 0 0 −λ
= −λ
−λ 0 1
0 −λ 11 0 −λ
= −λ(−λ3 + λ) = λ2(λ2 − 1)
Ası, el polinomio caracterıstico de A es p(λ) = λ2(λ2
−1) = λ2(λ + 1)(λ
−1).
b) Puesto que rang(A) = 3 se deduce que dim(V (0)) = 4 − rang(A) = 1. Por tanto, Ano es diagonalizable y no existe ninguna matriz P tal que P −1 · A · P sea diagonal.
Sin dificultad se comprueba que
V (0) = (0, 0, 1, 0), V (1) = (1, 1, 1, 1), V (−1) = (1, 1, −1, −1),
que son los unicos vectores propios de A. Esto proporciona tres vectores propioslinealmente independientes v1 = (0, 0, 1, 0), v3 = (1, 1, 1, 1) y v4 = (1, 1, −1, −1).Puesto que 0 es valor propio doble, el sistema
A ·
x
yzt
=
0
010
⇒
t = 0
t = 01/2x + 1/2y = 1
x = 0

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 37/47
Diagonalizacion 33
cuya solucion es x = 0, y = 2, z = α, t = 0, proporciona un cuarto vector (v2 =(0, 2, 0, 0), haciendo α = 0) que, junto con los tres vectores propios, permite obtenerla matriz P de paso que da la forma canonica de Jordan de A. Para ello hemos
tomado un valor de α tal que v2 y los vectores propios forman un sistema linealmenteindependiente, de modo que P es regular.
Ası, existe una matriz P tal que P −1 · A · P = J es la forma canonica de Jordan deA. Las matrices J y P son
J =
0 1 0 00 0 0 00 0 1 00 0 0 −1
y P =
0 0 1 10 2 1 11 0 1 −10 0 1 −1
c) A la vista del polinomio caracterıstico, se deduce que el polinomio mınimo de A puede
ser ϕ(λ) = λ2
(λ + 1)(λ − 1) o bien ϕ(λ) = λ(λ + 1)(λ − 1). Pero si fuese este ultimo,la matriz serıa diagonalizable; por tanto, se tiene que ϕ(λ) = p(λ) = λ2(λ +1)(λ− 1).
d ) Puede comprobarse que
A2 =
1 0 0 01 0 0 00 0 0 10 0 0 1
y A3 =
0 0 0 10 0 0 11 0 0 01 0 0 0
y que A4 = A6 = · · · = A2k = A2, A5 = A7 = · · · = A2k+1 = A3.
Entonces, el subespacio vectorial pedido esta generado por {I , A , A2, A3}, y como
estas cuatro matrices son linealmente independientes, forman base. Si llamamos H adicho subespacio, se verifica por tanto que dim(H ) = 4 y H = I , A , A2, A3.

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 38/47
34 Diagonalizacion
5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 39/47
Tema 7
El espacio vectorial euclıdeo.
Aplicaciones ortogonales
5. En R4 con el producto escalar usual, obtener el subespacio ortogonal a V , siendo este:
V = {(x,y ,z ,t) ∈ R4 : x + y − z + t = 0, 2x + y − z + 3t = 0}
Solucion: De las ecuaciones que definen V se obtiene, resolviendo el correspondientesistema de dos ecuaciones y cuatro incognitas, que
V = {(x,y ,z ,t) ∈ R4 : x + y − z + t = 0, 2x + y − z + 3t = 0} = (0, 1, 1, 0), (−2, 1, 0, 1)
Entonces V ⊥ es el subespacio formado por los vectores (x,y ,z ,t) ∈ R4 que verifican lascondiciones
(0, 1, 1, 0), (x,y ,z ,t) = 0 y (−2, 1, 0, 1), (x,y ,z ,t) = 0
Desarrollando ambas expresiones se obtiene el sistema
y + z = 0
−2x + y + t = 0
Para resolverlo, basta llamar x = λ, y = µ. Resulta entonces z = −µ, t = 2λ − µ, por loque
V ⊥ = (1, 0, 0, 2), (0, 1, −1, −1).
Otra forma de hacer el ejercicio consiste en observar que los vectores que verifican laecuacion x + y − z + t = 0 son ortogonales a (1, 1, −1, 1), mientras que los vectores queverifican 2x + y − z + 3t = 0 son ortogonales a (2, 1, −1, 3). Como cualquier vector de V ,por verificar ambas ecuaciones, es ortogonal a cualquier combinacion lineal suya, se deduceque
V ⊥ = (1, 1, −1, 1), (2, 1, −1, 3).

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 40/47
36 El espacio euclıdeo
12. Sea S el espacio vectorial de las matrices simetricas de orden 2 con coeficientes en R:
S = a b
b c : a,b,c
∈R
Se considera en S la aplicacion
, : S × S −→ R
A, B = tr(A · B), ∀A, B ∈ S
a ) ¿Es , un producto escalar?
b) En caso de serlo, hallar el subespacio ortogonal del subespacio V , generado por lamatriz
A = 1 −1
−1 0
Solucion: Notese en primer lugar que, dadas dos matrices
A =
a bb c
y B =
a b
b c
su producto es
A · B =
aa + bb ab + bc
ba + cb bb + cc
con lo que
A, B
= tr(A
·B) = aa + 2bb + cc.
a ) La aplicacion , si es un producto escalar sobre S , pues verifica las propiedades
A, B = B, A A + B, C = A, C + B, C λA,B = λA, B A, A ≥ 0A, A = 0 ⇔ A = 0
donde A =
a bb c
, B =
a b
b c
, C =
a b
b c
∈ S , λ ∈ R.
En efecto,
A, B
= aa
+ 2bb
+ cc
= a
a + 2b
b + c
c =
B, A
A + B, C = (a + a)a + 2(b + b)b + (c + c)c
= aa + 2bb + cc + aa + 2bb + cc = A, C + B, C
λA,B = λaa + 2λbb + λcc = λ(aa + 2bb + cc) = λA, B
A, A = a2 + 2b2 + c2 ≥ 0
A, A = 0 ⇔ a2 + 2b2 + c2 = 0 ⇔ a = b = c = 0 ⇔ A = 0
b) El subespacio ortogonal buscado V ⊥ lo forman las matricesa bb c
∈ S

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 41/47
El espacio euclıdeo 37
tales que
0 = a b
b c ,
1 −1
−1 0 = tr
a − b −a
b − c −b = a
−2b = 0
es decir, tales que a = 2b.
Por tanto,
V ⊥ =
a bb c
∈ S : a = 2b
=
2 11 0
,
0 00 1
17. Sea (R2[x], , ) el espacio vectorial euclıdeo de los polinomios de grado menor o igual que
2, con coeficientes reales y , el producto escalar definido por
a + bx + cx2, a + bx + cx2 = aa + bb + cc ∀a + bx + cx2, a + bx + cx2 ∈ R2[x]
Sea B = {1, x , x2} una base de R2[x]. Sea f : R2[x]−→R2[x] el endomorfismo definido porf (a + bx + cx2) = c + bx + ax2 y A = (f )B y sea M = {X : X = An, con n ∈ N}.
a ) Estudiar que estructura presenta M con el producto usual de matrices.
b) Clasificar razonadamente f .
c) ¿Es f diagonalizable? En caso afirmativo, hallar una base B en la que se consigadicha diagonalizacion.
d ) Hallar la matriz del cambio de base de B a B.e) Hallar el polinomio mınimo de A y a partir de el obtener (A−1)2, si existe.
f ) Hallar la distancia del vector 1 + x + x2 al subespacio H = f (1 + x), f (x).
g ) Hallar el subespacio ortogonal de H .
Solucion:
a ) Observemos en primer lugar que
M B(f ) = A =0 0 1
0 1 01 0 0
Se verifican las igualdades
A0 = I A1 = A =
0 0 1
0 1 01 0 0
A2 =
1 0 0
0 1 00 0 1
= I
Por tanto, A2k+1 = A, A2k = I, ∀k ∈ N, de donde M = {I, A}.
El producto de matrices sobre M da la siguiente tabla:
· I AI I AA A A2 = I

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 42/47
38 El espacio euclıdeo
Sin dificultad se comprueba que (M, ·) es un grupo abeliano.
b) Recuerdese que, si f es un endomorfismo de V y A la matriz de f respecto de unabase cualquiera, se verifica que dim(Im(f )) = rang(A).
Puesto que
|A| =
0 0 10 1 01 0 0
= −1 = 0
se deduce que rang(A) = 3 = dim(Im(f )). Por tanto f es suprayectiva y debe serbiyectiva, es decir, es un isomorfismo.
c) Obtengamos el polinomio caracterıstico de f .
p(λ) = |A − λI | =
−λ 0 10 1 − λ 0
1 0 −λ
= (−λ)2(1 − λ) − (1 − λ) = −(λ + 1)(λ − 1)2
Por tanto, los valores propios son λ = −1, simple y λ = 1, doble.
Puesto que
dim(V (1)) = 3 − rang(A − I ) = 3 − rang
−1 0 1
0 0 01 0 −1
= 2
se deduce que f es diagonalizable. Su forma diagonal es
D = 1 0 0
0 1 00 0 −1
La base en la que la matriz de f es D esta formada por los vectores propios, quehallamos a continuacion.
El subespacioV (1) = Ker(f − i) = {X : (A − I )X = 0}
se obtiene resolviendo el sistema
−1 0 1
0 0 0
1 0 −1 ·
x1x2x3 =
00
0
Resulta la ecuacion −x1 + x3 = 0 que puede escribirse como x1 = x3, de donde
V (1) = {(x1, x2, x1) : x1, x2 ∈ R} = (1, 0, 1)B, (0, 1, 0)B = 1 + x2, x.
De forma similar, el subespacio
V (−1) = Ker(f + i) = {X : (A + I )X = 0}
se obtiene resolviendo el sistema 1 0 10 2 01 0 1
· x1
x2
x3
=
000

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 43/47
El espacio euclıdeo 39
Resultan las ecuaciones x1 + x3 = 0, 2x2 = 0, de donde se sigue que
V (−1) = {(x1, 0, −x1) : x1 ∈ R} = (1, 0, −1)B = 1 − x2.
En la base B = {1+x2, x, 1−x2}, la matriz de f es D. Se verifica que P −1 ·A·P = D,siendo
P =
1 0 1
0 1 01 0 −1
d ) La matriz del cambio de base de B a B es la matriz P del apartado anterior. Lamatriz pedida (de cambio de base de B a B) es P −1; sin dificultad se comprueba que
P −1 =
1/2 0 1/20 1 0
1/2 0 −1/2
Se verifica que X B = P · X B y tambien que X B = P −1 · X B, donde X B es la matrizcolumna de las coordenadas de un vector cualquiera en la base B y X B es la matrizcolumna de las coordenadas del mismo vector en la base B.
e) El polinomio caracterıstico de f es p(λ) = −(λ+1)(λ−1)2 y como es un endomorfismodiagonalizable, el polinomio mınimo es
ϕ(λ) = (λ + 1)(λ − 1) = λ2 − 1.
En virtud del teorema de Cayley-Hamilton, podemos asegurar que el polinomio mıni-
mo es un polinomio anulador de A; por tanto, se verifica que ϕ(A) = A2
− I = 0, demodo que A2 = I y A−1 = A.
Por tanto, (A−1)2 = A2 = I .
f ) Sea v = 1 + x + x2 y H = f (1 + x), f (x) = x + x2, x. Por definicion, d(v, H ) =d(v,proyH (v)).
Hay que determinar, pues, w = proyH (v). Para ello, basta tener en cuenta que debeverificarse que w ∈ H y (v − w)⊥H .
w = α(x + x2) + βx = (α + β)x + αx2
v − w = 1 + x + x2 − (α + β)x − αx2 = 1 + (1 − α − β)x + (1 − α)x2
Como (v −w)⊥H si, y solo si, se verifican las relaciones (v −w)⊥(x+ x2) y (v −w)⊥x,se tiene:
v − w, x + x2 = 1 + (1 − α − β)x + (1 − α)x2, x + x2= 1 − α − β + 1 − α = 2 − 2α − β = 0
v − w, x = 1 + (1 − α − β)x + (1 − α)x2, x = 1 − α − β = 0
El sistema 2α + β = 2
α + β = 1
equivale, restando a la primera ecuacion la segunda, aα = 1α + β = 1

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 44/47
40 El espacio euclıdeo
cuya solucion es α = 1, β = 0.
Por tanto, w = x + x2 y la distancia buscada es
d(v, H ) = d(v, w) = d(1 + x + x2
, x + x2
)= 1 + x + x2 − x − x2 = 1 =
1, 1 =
√1 = 1.
g ) Para determinar el subespacio
H ⊥ = {v ∈ R2[x] : v⊥H } = {v ∈ R2[x] : v⊥(x + x2), v⊥x}
hemos de calcular los vectores v = a + bx + cx2 ∈ R2[x] tales que
a + bx + cx2, x + x2 = 0 y a + bx + cx2, x = 0.
Aplicando la definicion, resulta que
a + bx + cx2, x + x2 = b + c = 0
a + bx + cx2, x = b = 0
Se obtiene entonces que b = c = 0, de donde
H ⊥ = {v ∈ R2[x] : v⊥H }= {a + bx + cx2 ∈ R2[x] : b = c = 0} = {a : a ∈ R} = 1
Una base de H ⊥ es {1}.
Observacion: Conociendo previamente el subespacio H ⊥, hay otra forma de abordar
el problema del calculo de la proyeccion ortogonal.Si w = proyH (v), entonces w ∈ H y (v − w) ∈ H ⊥. De este modo resulta quev − w = γ · 1 = γ , de donde w = v − γ = (1 − γ ) + x + x2 y como w⊥H ⊥, tendremos
(1 − γ ) + x + x2, 1 = 1 − γ = 0 ⇒ γ = 1
Sustituyendo ahora, resulta w = (1 − 1) + x + x2 = x + x2.
21. Sea V un espacio vectorial de dimension 3 y sea B = {e1, e2, e3} una base de V . Definimosen V el siguiente producto escalar, donde v = x1e1+x2e2+x3e3, w = y1e1+y2e2+y3e3 ∈ R3:
v, w = 2x1y1 + x2y2 + 12x3y3 − x1y2 − x2y1 + 3x1y3 + 3x3y1
a ) Hallar la matriz de Gram en la base B y dar la expresion matricial correspondiente.
b) Sea W el subespacio de V siguiente:
W = {(α + β)e1 + (2α − 4β)e2 + 2βe3 : α, β ∈ R}.
1) Hallar una base ortogonal de W .
2) Hallar el subespacio W ⊥. ¿Son suplementarios W y W ⊥? ¿Son ortogonales?c) Haciendo uso de b), dar una base ortogonal de V . Hallar la matriz de Gram en esta
base. ¿Que relacion hay entre esta matriz y la obtenida en el apartado a )?

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 45/47
El espacio euclıdeo 41
Solucion:
a ) La matriz de Gram respecto de la base B es
G =
e1, e1 e1, e2 e1, e3e2, e1 e2, e2 e2, e3e3, e1 e3, e2 e3, e3
=
2 −1 3−1 1 0
3 0 12
Sus elementos se obtienen directamente a partir de la definicion del producto escalar.
Dados v, w ∈ V dos vectores cualesquiera,
v, w = X t · G · Y = (x1, x2, x3) · 2 −1 3
−1 1 03 0 12
·
y1
y2y3
donde X e Y son las matrices columna de las coordenadas de v y w en la base B.
b) Debemos obtener una base de W a partir de la expresion dada.
W = {(α + β)e1 + (2α − 4β)e2 + 2βe3 : α, β ∈ R}= {(α + β, 2α − 4β, β)B : α, β ∈ R}= (1, 2, 0)B, (1, −4, 2)B = e1 + 2e2, e1 − 4e2 + 2e3
Estos vectores son linealmente independientes y, por tanto, constituyen una base deW : BW = {e1 + 2e2, e1 − 4e2 + 2e3}.
b.1) Para hallar una base ortogonal de W , aplicamos el metodo de Gram-Schmidt a labase BW . Tomamos los vectores
w1 = e1 + 2e2
w2 = e1 − 4e2 + 2e3 + α(e1 + 2e2) = (1 + α)e1 + (−4 + 2α)e2 + 2e3
Puesto que debe ser w2⊥w1, es decir w1, w2 = 0, se tendra
(1, 2, 0) · 2 −1 3
−1 1 03 0 12
·
1 + α
−4 + 2α2
= 0 ⇒ 2 + 2α = 0
de modo que α = −1.
Por tanto, w2 = e1 − 4e2 + 2e3 − (e1 + 2e2) = −6e2 + 2e3.
Ası pues, BW = {e1 + 2e2, −6e2 + 2e3} es una base ortogonal de W .b.2 ) El subespacio ortogonal de W es
W ⊥ = {v ∈ V : v⊥w, ∀w ∈ W } = {v ∈ V : v⊥w1, v⊥w2}.
Si denotamos v = xe1 + ye2 + ze3, como debe ser v⊥w1 y v⊥w2, es decir, w1, v = 0,w2, v = 0, tendremos:
w1, v = (1, 2, 0) · 2 −1 3
−1 1 03 0 12
·
x
yz
= y + 3z = 0
w2, v = (0, −6, 2) · 2 −1 3
−1 1 03 0 12
· x
yz
= 12x − 6y + 24z = 0

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 46/47
42 El espacio euclıdeo
La solucion del sistema
12x − 6y + 24z = 0
y + 3z = 0
es
x = −7
2λ
y = −3λz = λ
Ası pues,
W ⊥ =
−7
2λ, −3λ, λ
: λ ∈ R
= (−7, −6, 2)B = −7e1 − 6e2 + 2e3.
y BW ⊥ = {−7e1 − 6e2 + 2e3} es una base de W ⊥.
Los subespacios W y W ⊥ son suplementarios, pues, al tener W dimension finita, se
verifica siempre que W y su subespacio ortogonal son suplementarios. Tambien sonevidentemente ortogonales por definicion.
c) Como BW es una base ortogonal de W y BW ⊥ es base ortogonal de W ⊥, es evidente
que BW ∪ BW ⊥ = {e1 + 2e2, −6e2 + 2e3, −7e1 − 6e2 + 2e3} es una base ortogonal de
V , pues como acabamos de decir, W ⊥W ⊥ y W ⊕ W ⊥ = V .
Para hallar una base ortonormal de V basta normalizar los vectores de BW ∪ BW ⊥.
Si llamamos u1 = e1 + 2e2, u2 = −6e2 + 2e3 y u3 = −7e1 − 6e2 + 2e3, resulta:
u12 = u1, u1 = (1, 2, 0) ·
2 −1 3−1 1 0
3 0 12
·
120
= 2
por lo tanto u1 =√
2.
u22 = u2, u2 = (0, −6, 2) · 2 −1 3
−1 1 03 0 12
·
0
−62
= 84
de modo que u2 =√
84 = 2√
21.
u32 = u3, u3 = (−7, −6, 2) ·
2 −1 3
−1 1 03 0 12
·
−7−62
= 14
de donde u3 =√
14.
Por tanto, tomando
w1 =1√
2u1 =
√2
2u1 =
√2
2e1 +
√2e2
w2 =1
2√
21u2 =
√21
42u2 = −
√21
7e2 +
√21
21e3
w3 =1√14
u3 =
√14
14u3 = −
√14
2e1 − 3
√14
7e2 +
√14
7e3
se obtiene una base de V √2
2e1 +
√2e2, −
√21
7e2 +
√21
21e3, −
√14
2e1 − 3
√14
7e2 +
√14
7e3

5/12/2018 Algebra - Ejerc Resueltos - slidepdf.com
http://slidepdf.com/reader/full/algebra-ejerc-resueltos 47/47
El espacio euclıdeo 43
que es ortonormal.
La matriz de Gram en esa base es la matriz identidad de orden 3,
G = 1 0 00 1 0
0 0 1
.
Las matrices G (inicial) y G son congruentes, es decir, existe una matriz P ortogonaltal que G = P t · G · P . La matriz P es una matriz ortogonal de un cambio de base;mas concretamente, es la matriz de cambio de la base ortonormal a la base inicial.En este caso,
P =
√2
20 −
√14
2√
2−
√21
7 −3√
14
7
0
√21
21
√14
7